unit 3. integral calculus (2 credits)mapmf.pmfst.unist.hr/~vlasta/mathematics/unit 3/integral...
TRANSCRIPT
UNIT 3.INTEGRAL CALCULUS
(2 credits)
February 1, 2002

Contents
INTEGRAL CALCULUS 15.1 Antidifferentiation.
The Indefinite Integral . . . . . . . . . . . . . . . . . . . . . . 15.2 Integration by Substitution . . . . . . . . . . . . . . . . . . . . 115.3 Integration by Parts . . . . . . . . . . . . . . . . . . . . . . . 175.4 The use of Integral tables . . . . . . . . . . . . . . . . . . . . 215.5 The Definite Integral . . . . . . . . . . . . . . . . . . . . . . . 25
5.5.1 Substitution in the Definite Integral . . . . . . . . . . . 305.5.2 Integration by Parts in the Definite Integral . . . . . . 31
5.6 Area and Integration . . . . . . . . . . . . . . . . . . . . . . . 335.7 Appendix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.7.1 A Short Table of Integrals . . . . . . . . . . . . . . . . 38
i
INTEGRAL CALCULUS
5.1 Antidifferentiation.The Indefinite Integral
In many problems, the derivative of a function is known and the goal is tofind the function itself. For example, a sociologist who knows the rate atwhich the population is growing may wish to use this information to predictfuture population levels; a physicist who knows the speed of a moving bodymay wish to calculate the future position of the body; an economist whoknows the rate of inflation may wish to estimate future prices.The process of obtaining a function from its derivative is called antidif-
ferentiation or integration.
Definition 5.1 Let f : A→ R, A ⊆ R, be a function.A function F : A→ R such that
F 0(x) = f(x)
for each x ∈ A is said to be an antiderivative (or primitive function) of f .
Later in this section you will learn techniques you can use to find anti-derivatives. Once you have found what you believe to be an antiderivative ofa function, you can always check your answer by differentiating. You shouldget the original function back. Here is an example.
Example 5.2 Verify that F (x) = 13x3 + 5x+ 2 is an antiderivative of
f(x) = x2 + 5.Solution. F (x) is an antiderivative of f(x) if and only if F 0(x) = f(x).Differentiate F and you will find that
F 0(x) = x2 + 5 = f(x)
as required.
1

INTEGRAL CALCULUS 2
A function has more than one antiderivative. For example, one antideriv-ative of the function f(x) = 3x2 is F (x) = x3, since
F 0(x) = 3x2 = f(x).
But so is G(x) = x3 + 12, since the derivative of the constant 12 is zero and
G0(x) = 3x2 = f(x).
In general, if F is one antiderivative of f , any function obtained by adding aconstant to F is also an antiderivative of f .
Theorem 5.3 Let F and G be two antiderivatives of f , that is let
F 0(x) = f(x) and G0(x) = f(x).
Then G(x)− F (x) = C, where C is a constant.
Proof. Define function D with
D(x) = G(x)− F (x).
Derivation of D is
D0(x) = (G(x)− F (x))0 = G0(x)− F 0(x) = f(x)− f(x) = 0
that isD0(x) = 0
We know that if derivation of a function, on some interval, is zero, then thisfunction is constant on that interval. So
D(x) = C
orG(x)− F (x) = C.
So, we see that every primitive function of a given function f(x) is of theform F (x) +C, where C is a constant. Set of all primitive functions of f(x)is called an indefinite integral and we writeZ
f(x)dx = F (x) + C.
INTEGRAL CALCULUS 3
For example, Z3x2dx = x3 + C.
The symbolRis called an integral sign, the function f(x) is called the
integrand, and the (unspecified) constant C is the constant of integra-tion. The operation of finding an indefinite integral is called the integra-tion. The symbol dxmay seemmysterious. Its role is to indicate that x is thevariable with respect to which the integration is to be performed. Analogousnotation is used if the function is expressed in terms of a variable other thanx, e.g.
R3t2dt = t3 + C. In the expression
R3px2dx, the dx tells you that x
rather than p is the variable of the integration. Thus,R3px2dx = px3 + C.
(Do you see how to evaluateR3px2dp?)
Here is a restatement of the definition of the indefinite integral (or anti-derivative) in integral notion.
Definition 5.4 The indefinite integralRf(x)dx = F (x) + C if and only if
F 0(x) = f(x)
for every x in the domain of f .
Example 5.5 The indefinite integral of the exponential function ex isZexdx = ex + C
since (ex)0 = ex.
Example 5.6 Verify that for n 6= −1, R xndx = 1n+1xn+1 + C, and find the
following integrals:(a)
Rx35dx (b)
R1dx (c)
R1√xdx.
Solution. µ1
n+ 1xn+1
¶0=n+ 1
n+ 1xn = xn.
The rule holds for all values of n except, of course, n = −1, in which case1n+1
is undefined. This special case will be discussed in the next example.(a) Increase the power of x by 1 and then divide by the new power to getZ
x35dx =
5
8x85 + C.

INTEGRAL CALCULUS 4
(b) Since 1 = x0, it follows thatZ1dx = x+ C.
(c) Begin by rewriting 1√xas x−
12 . Then,Z
1√xdx =
Zx−
12dx = 2x
12 + C = 2
√x+ C.
Example 5.7 The natural logarithm ln x is a function whose derivative is1x, and so it appears that
R1xdx = ln x+C. Actually, this is true only when
x is positive, since ln x is not defined for nonpositive values of x. When x isnegative, it turns out that the function ln |x| is an antiderivative of 1
x, for if
x is negative, |x| = −x and
(ln |x|)0 = (ln(−x))0 =µ1
−x¶(−1) = 1
x.
Since |x| = x when x is positive, the integral of 1xis given by the following
single formula. Z1
xdx = ln |x|+ C.
Geometric interpretation
If we put y =Rf(x)dx , then y = F (x) + C. Hence, an indefinite integral
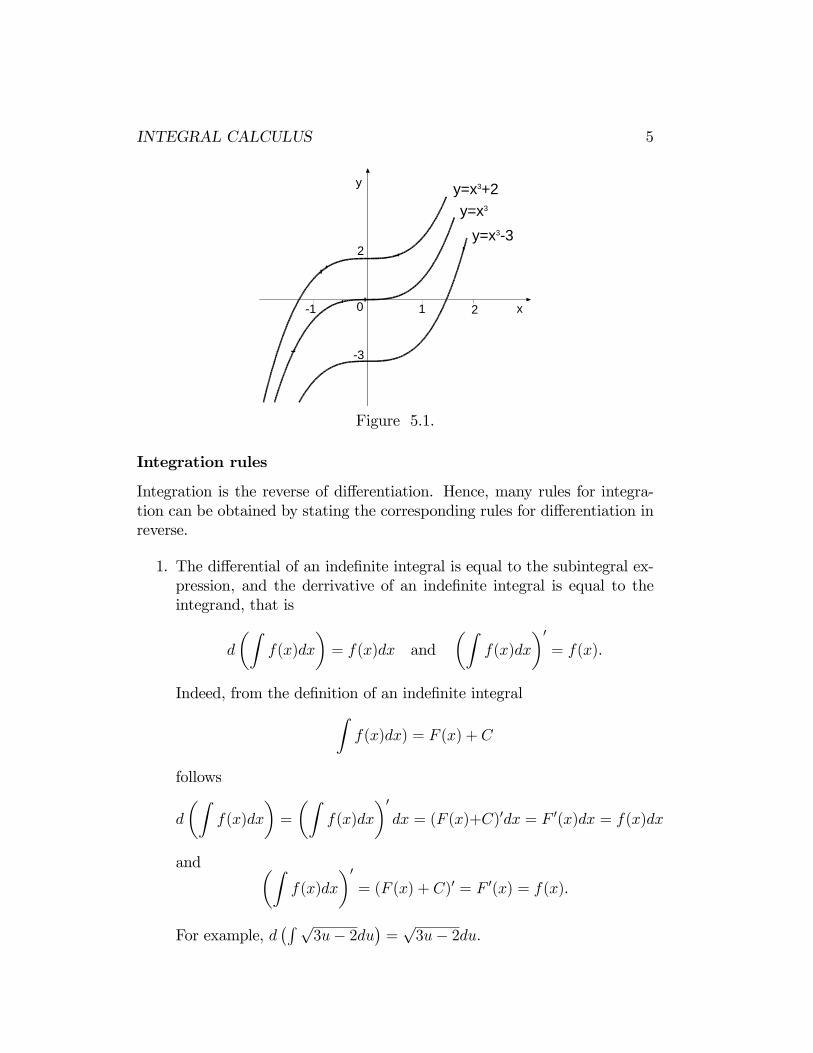
represents a family of curves obtained for different values of the constant C.These curves are called integral curves. Any of these integral curves canbe obtained by translating vertically some other curve from the same family.Figure 5.1 shows integral curves of the function f(x) = 3x2, which belongsto the constants of integration C = 0, C = 2 and C = −3.
INTEGRAL CALCULUS 5
-3
0
y
-1 1 x
y=x3+2y=x3
y=x3-3
2
2
Figure 5.1.
Integration rules
Integration is the reverse of differentiation. Hence, many rules for integra-tion can be obtained by stating the corresponding rules for differentiation inreverse.
1. The differential of an indefinite integral is equal to the subintegral ex-pression, and the derrivative of an indefinite integral is equal to theintegrand, that is
d
µZf(x)dx
¶= f(x)dx and
µZf(x)dx
¶0= f(x).
Indeed, from the definition of an indefinite integralZf(x)dx) = F (x) + C
follows
d
µZf(x)dx
¶=
µZf(x)dx
¶0dx = (F (x)+C)0dx = F 0(x)dx = f(x)dx
and µZf(x)dx
¶0= (F (x) + C)0 = F 0(x) = f(x).
For example, d¡R √
3u− 2du¢ = √3u− 2du.

INTEGRAL CALCULUS 6
2. The indefinite integral of an differential of a function is equal to thefunction plus unspecified constant, that isZ
dF (x) = F (x) + C.
Indeed, we haveZdF (x) =
ZF 0(x)dx =
Zf(x)dx = F (x) + C.
For example,Rd cos x = cosx+ C.
3. The indefinite integral of a constant times a function is equal to theconstant times the indefinite integral of the function, that is, for anyconstant c, Z
cf(x)dx = c
Zf(x)dx.
We will prove the rule by showing that the derivative of the right handside of this equality is equal to the integrand on the left hand side.Indeed, using the rule for the derivative of a constant times a function,we have µZ
cf(x)dx
¶0= c
µZf(x)dx
¶0= cf(x).
4. The indefinite integral of a sum is the sum of the individual indefiniteintegrals, that isZ[f1(x)+f2(x)+· · ·+fn(x)]dx =
Zf1(x)dx+
Zf2(x)dx+· · ·+
Zfn(x)dx.
We will prove the rule also by showing that the derivative of the righthand side of this equation is equal to the integrand on the left handside. Indeed, using the rule for the derivative of a sum, we haveµZ
[f1(x) + f2(x) + · · ·+ fn(x)]dx¶0=
=
µZf1(x)dx
¶0+
µZf2(x)dx
¶0+ · · ·+
µZfn(x)dx
¶0=
= f1(x) + f2(x) + · · ·+ fn(x).
Here is an example illustrating the use of the last two rules.

INTEGRAL CALCULUS 7
Example 5.8 FindR ¡4x3 − 1
2x2 + 2
x− 3¢ dx.
Solution.Z µ4x3 − 1
2x2 +
2
x− 3¶dx = 4
Zx3dx− 1
2
Zx2dx+ 2
Z1
xdx− 3
Zdx =
= x4 − 16x3 + 2 ln |x|− 3x+ C.
You may have noticed that no general rules have been given for the inte-gration of products and quotients. This is because there are no general rules.Occasionally, you will be able to rewrite a product or a quotient in a formin which you can integrate it using the techniques you have learned in thissection. Here is an example.
Example 5.9 FindR3x5+2x−5
x3dx.
Solution. Perform the indicated division to get
3x5 + 2x− 5x3
= 3x2 +2
x2− 5
x3= 3x2 + 2x−2 − 5x−3
and then integrate:Z3x5 + 2x− 5
x3dx =
Z ¡3x2 + 2x−2 − 5x−3¢ dx = x3 − 2x−1 + 5
2x−2 + C =
= x3 − 2x+5
x2+ C.
Naturally, you may ask if every function has a primitive function (andthus an indefinite integral). The answer on this question gives the followingtheorem, which we will leave without proof.
Theorem 5.10 Let f : [a, b] → R be a continuous function. Then thereexist a primitive function F : [a, b]→ R of f .
Geometric Application
The next example shows how integration can be used to find a function f(x),when the slope of the tangent line is known at each point on the graph off(x).
Example 5.11 Find the function f(x) whose tangent has slope 3x2 + 1 foreach value of x and whose graph passes through the point (2, 6).Solution. The slope of the tangent is the derivative of f . Thus
f 0(x) = 3x2 + 1

INTEGRAL CALCULUS 8
and so f(x) is the indefinite integral
f(x) =
Zf 0(x)dx =
Z(3x2 + 1)dx = x3 + x+ C.
To find C, use the fact that the graph of f passes through (2, 6). That is,substitute x = 2 and f(2) = 6 into the equation for f(x) and solve for C toget
6 = 23 + 2 + C or C = −4.That is, the desired function is f(x) = x3 + x+ 4.
Practical Applications
Here are two problems in which the rate of change of a quantity is knownand the goal is to find an expression for the quantity itself. Since the rateof changes is the derivative of the quantity, you find the expression for thequantity itself by antidifferentiation.
Example 5.12 It is estimated that x months from now the population ofa certain town will be changing at the rate of 2 + 6
√x people per month.
The current population is 5000. What will the population be 9 months fromnow?Solution. Let P (x) denote the population of the town x months from now.Then the rate of change of the population with respect to time is the deriv-ative
dP
dx= 2 + 6
√x
It follows that the population function P (x) is an antiderivative of 2 + 6√x.
That is,
P (x) =
ZdP
dxdx =
Z(2 + 6
√x)dx = 2x+ 4x
32 + C
for some constant C. To determine C, use the fact at present (when x = 0)the population is 5000. That is,
5000 = 2 · 0 + 4 · 0 32 + C or C = 5000.
Hence,P (x) = 2 · 9 + 4 · 27 + 5000 = 5126.
Example 5.13Amanufacturer has found that marginal cost is 3q2−60q+400euros per unit have been produced. The total cost of producing the first 2

INTEGRAL CALCULUS 9
units is 900 euros. What is the total cost of producing the first 5 units?Solution. The marginal cost is the derivative of the total cost function C(q).Thus,
C 0(q) = 3q2 − 60q + 400and so C(q) must be the antiderivative
C(q) =
ZC 0(q)dq =
Z(3q2 − 60q + 400)dq = q3 − 30q2 + 400q +K
for some constant K. (The letter K was used for the constant to avoidconfusion with the cost function C.)The value of K is determined by the fact that C(2) = 900. In particular,
900 = 23 − 30 · 22 + 400 · 2 +K or K = 212
Hence,C(q) = q3 − 30q2 + 400q + 212
and the cost of producing the first 5 units is
C(5) = 53 − 30 · 52 + 400 · 5 + 212 = 1587 euros.
Physical application
Recall that if an object moves along a straight line with displacement s(t),then its velocity is given by v = ds
dtand its acceleration by a = dv
dt. If the
acceleration of the object is given, then its velocity and displacement can befound by integration. Here is an example.
Example 5.14 After its brakes are applied, a certain car decelerates at theconstant rate of 4 meters per second per second. If the car is traveling at 24meters per second when the brakes are applied, how far does it travel beforecoming to a complete stop?Solution. Let s(t) denote the displacement (distance) of the car t secondsafter the brakes are applied. Since the car decelerates at 4 meters per secondper second, it follows that a(t) = −4 (the negative sign indicates that thecar is slowing down), and
dv
dt= a(t) = −4.
Integrating, you find that the velocity at time t is given by
v(t) =
Z−4dt = −4t+ C1.

INTEGRAL CALCULUS 10
To evaluate C1, note that v = 24 when t = 0 so that
24 = v(0) = −4 · 0 + C1 and C1 = 24.
Thus the velocity at time t is
v(t) = −4t+ 24.
Next, to find the displacement s(t), begin with the fact that
ds
dt= v(t) = −4t+ 24
and use integration to show that
s(t) =
Z(−4t+ 24)dt = −2t2 + 24t+ C2.
Since s(0) = 0 (do you see why?), it follows that C2 = 0 and
s(t) = −2t2 + 24t.
Finally, to find the stopping distance, note that the car stops when v(t) = 0,and this occurs when
v(t) = −4t+ 24 = 0.Solving this equation, you find that car stops after 6 seconds of deceleration,and in that time it has traveled
s(6) = −2 · 62 + 24 · 6 = 72 meters.
INTEGRAL CALCULUS 11
5.2 Integration by SubstitutionThis section deals with the integral version of the chain rule. Here is a typicalapplication of the chain rule for differentiation.According to the chain rule, the derivative of the function (x2 + 3x+ 5)9
isd
dx
£(x2 + 3x+ 5)9
¤= 9(x2 + 3x+ 5)8(2x+ 3).
Notice that the derivative is a product and that one of its factors, 2x+ 3, isthe derivative of an expression, x2+3x+5, which occurs in the other factor.More precisely, the derivative is a product of the form
g(u)du
dx
where, in this case, g(u) = 9u8 and u = x2 + 3x+ 5.You can integrate many products of the form g(u)du
dxby applying the
chain rule in reverse. Let u = ϕ(x) be strictly monotonic function whichis derivable in a interval (α, β), and which maps that interval on a interval(a, b) in which a function g(u) is defined. Suppose that ϕ0(x) 6= 0, and thatx = ψ(u) is inverse function of u = ϕ(x). Then the next theorem holds.
Theorem 5.15 If the function Φ(x) is primitive function of g(ϕ(x))ϕ0(x),then the function G(u) = Φ(ψ(u)) is primitive function of g(u).Proof. Since ψ is inverse function of ϕ, we have
ϕ(ψ(u)) = u, (5.1)
so[ϕ(ψ(u))]0 = ϕ0(ψ(u))ψ0(u) = 1. (5.2)
Since Φ(x) is primitive function of g(ϕ(x))ϕ0(x), it follows
G0(u) = (Φ(ψ(u)))0 = Φ0(ψ(u))ψ0(u) == g(ϕ(ψ(u)))ϕ0(ψ(u))ψ0(u) = g(u),
where we used (5.1) and (5.2)
To summarize:

INTEGRAL CALCULUS 12
Integral form of the Chain RuleZg(u)
du
dxdx =
Zg(u)du
That is, to integrate a product of the form g(u)dudxin which one of the factors
dudxis the derivative of an expression u that appears in the other factor, first
find the indefinite integralRg(u)du of the factor g(u) with respect to u, and
then replace u in the answer by its expression in terms of x.Here are two examples.
Example 5.16 FindR9(x2 + 3x+ 5)8(2x+ 3)dx.
Solution. The integrand 9(x2+3x+5)8(2x+3) is a product in which one ofthe factors 2x+3 is the derivative of an expression x2+3x+5 that appearsin the other factor. In particular
9(x2 + 3x+ 5)8(2x+ 3) = g(u)du
dx
whereg(u) = 9u8 and u = x2 + 3x+ 5.
Hence, by the integral form of the chain rule,Z9(x2 + 3x+ 5)8(2x+ 3)dx =
Zg(u)du =
Z9u8du = u9 + C =
= (x2 + 3x+ 5)9 + C.
The product to be integrated in the next example is not exactly of theform g(u)du
dx. However, it is a constant multiple of such a product, and you
can integrate it by combining the constant multiple rule with the integralform of the chain rule.
Example 5.17 FindRx3ex
4+2dx.Solution. First use the constant multiple rule to rewrite the integral asZ
x3ex4+2dx =
Z1
4
³4x3ex
4+2´dx =
1
4
Z ³4x3ex
4+2´dx
so that the new integrand 4x3ex4+2 is a product in which one of the factors
4x3 is the derivative of an expression x4+2 that appears in the other factor.In particular,
4x3ex4+2 = g(u)
du
dx

INTEGRAL CALCULUS 13
whereg(u) = eu and u = x4 + 2.
Hence, by the integral form of the chain rule,Zx3ex
4+2dx =1
4
Z ³4x3ex
4+2´dx =
1
4
Zg(u)du =
1
4
Zeudu =
1
4eu + C =
=1
4ex
4+2 + C.
Change of Variables
The integral form of the chain rule may be thought of as a technique forsimplifying an integral by changing the variable of integration. In particular,you start with an integral
Rg(u)du
dxdx in which the variable of integration is
x and transform it into the simpler integralRg(u)du in which the variable
of the integration is u. In this transformation, the expression dudxdx in the
original integral is replaced in the simplified integral by the symbol du. Itsuggests the following general technique, called integration by substitution,in which the variable u is formally substituted for an appropriate expressionin x and the original integral is transformed into a simpler one in which thevariable of integration is u.First introduce a fresh variable u to stand for some expression in x that
is chosen with the simplification of the integral as the goal, and then rewritethe integral in terms of u. To rewrite dx, compute du
dxand solve algebraically
as if the symbol dudxwere a quotient. Then, evaluate the resulting integral
and then replace u by its expression in terms of x in the answer.If the integrand is a product or quotient of two terms and one term is a
constant multiple of the derivative of an expression that appears in the other,then this expression is probably a good choice for u.The method of integration by substitution is illustrated in the next ex-
ample using the integral from Example 5.16.
Example 5.18 FindR9(x2 + 3x+ 5)8(2x+ 3)dx.
Solution. The integral is a product in which one of the factors 2x+3 is thederivative of an expression x2+3x+5 that appears in the other factor. Thissuggests that you let u = x2 + 3x+ 5. Then
du
dx= 2x+ 3 and so du = (2x+ 3)dx.

INTEGRAL CALCULUS 14
Substituting u = x2 + 3x+ 5 and du = (2x+ 3)dx, you getZ9(x2 + 3x+ 5)8(2x+ 3)dx =
Z9u8du = u9 + C =
= (x2 + 3x+ 5)9 + C.
Here are some additional examples illustrating the method of integrationby substitution.
Example 5.19 FindR
3xx2−1dx.
Solution. Observe that
d
dx(x2 − 1) = 2x = 2
3· 3x
Thus the integrand is a quotient in which one term 3x is a constant multipleof the derivative of an expression x2−1 that appears in the other term. Thissuggests that you let u = x2 − 1. Then,
du
dx= 2x du = 2xdx or
3
2du = 3xdx.
Substituting u = x2 − 1 and 32du = 3xdx, you getZ
3x
x2 − 1dx =
Z1
u
µ3
2du
¶=3
2
Z1
udu =
3
2ln |u|+ C
=3
2ln¯̄x2 − 1¯̄+ C.
Example 5.20 FindR
3x+6√2x2+8x+3
dx.Solution. Observe that
d
dx(2x2 + 8x+ 3) = 4x+ 8 = 4(x+ 2) =
4
3(3x+ 6)
Thus, the integrand is a quotient in which one term 3x + 6 is a constantmultiple of the derivative of an expression 2x2 + 8x + 3 that appears in theother term. This suggests that you let u = 2x2 + 8x+ 3. Then,
du
dx= 4x+ 8 so du = (4x+ 8)dx =
4
3(3x+ 6)dx
or3
4du = (3x+ 6)dx.

INTEGRAL CALCULUS 15
Substituting u = 2x2 + 8x+ 3 and 34du = (3x+ 6)dx, you getZ
3x+ 6√2x2 + 8x+ 3
dx =
Z3
4
1√udu =
3
4
Zu−
12du =
3
42u
12 + C =
=3
2
√2x2 + 8x+ 3 + C.
Example 5.21 FindR (lnx)2
xdx.
Solution. Observe thatd
dx(ln x) =
1
x.
Thus, the integrand(ln x)2
x= (ln x)2
1
x
is a product in which one factor 1xis the derivative of an expression lnx that
appears in the other factor. This suggests that you let u = ln x. Then,
du
dx=1
xor du =
1
xdx.
Substituting u = ln x and du = 1xdx, you getZ
(ln x)2
xdx =
Zu2du =
1
3u3 + C =
1
3(lnx)3 + C.
The next example is designed to show you the versatility of the formalmethod of substitution. It deals with an integral that does not seem to beof the form
Rg(u)du
dxdx but that nevertheless can be simplified significantly
by a clever change of variables.
Example 5.22 FindR
xx+1dx.
Solution. There seems to be no easy way to integrate this quotient as itstands. But watch what happens if you make substitution u = x+ 1. Thendu = dx and x = u− 1 and soZ
x
x+ 1dx =
Zu− 1u
du =
Z1du−
Z1
udu = u− ln |u|+ C =
= x+ 1− ln |x+ 1|+ C.Since C + 1 is again a constant, you can writeZ
x
x+ 1dx = x− ln |x+ 1|+ C.
INTEGRAL CALCULUS 16
A comparison of the Two Techniques
The integral form of the chain rule, which was used in Examples 5.16 and5.17, is attractive because it involves nothing more than a familiar rule fordifferentiation applied in reverse. With practice in using this method youshould be able to find integrals like those in Examples 5.16 through 5.21 byinspection, without writing down any intermediate steps.Nevertheless, many people prefer to use the method of formal substi-
tution. They like the fact that it involves straightforward manipulation ofsymbols, and they appreciate the convenience of the notation. This methodof substitution is also somewhat more versatile, as you saw in Example 5.22.For many of the integrals you will encounter, both methods work well
and you should feel free to use the one with which you are most comfortable.
INTEGRAL CALCULUS 17
5.3 Integration by PartsIn this section you will see a technique you can use to integrate certainproducts f(x)g(x). The technique is called integration by parts, and as youwill see, it is a restatement of the product rule for differentiation. Here is theformula for the technique:Z
f(x)g(x)dx = f(x)G(x)−Zf 0(x)G(x)dx,
where G is an antiderivative of g.To see how integration by parts is a restatement of what happens when the
product rule is used to differentiate f(x)G(x), where G is an antiderivativeof g, note that,
d
dx[f(x)G(x)] = f 0(x)G(x) + f(x)G0(x) = f 0(x)G(x) + f(x)g(x).
Expressed in terms of integrals, this says
f(x)G(x) =
Zf 0(x)G(x)dx+
Zf(x)g(x)
or Zf(x)g(x)dx = f(x)G(x)−
Zf 0(x)G(x)dx
which is precisely the formula for integration by parts.Integration by parts is a technique for integrating products f(x)g(x), in
which one of the factors, say g(x), can be easily integrated and the other,f(x), becomes simpler when differentiated. To evaluate such an integral,Rf(x)g(x)dx, using integration by parts, first integrate g and multiply the
result by f to get f(x)G(x), where G is an antiderivative of g. Then multiplythe antiderivative G by the derivative of f and subtract the integral of thisproduct from the result of the first step to get f(x)G(x) − R f 0(x)G(x)dx.This expression will be equal to the original integral
Rf(x)g(x)dx, and if
you are lucky, the new integralRf 0(x)G(x)dx will be easier to find than the
original one. Complete the procedure by finding the new integral.Here are some examples illustrating the procedure. In each example, g(x)
is used to denote the factor that is to be integrated and f(x) is used to denotethe factor that is to be differentiated. With practice, you will become familiarwith the pattern and should find that you can do integration by parts withoutthe intermediate step of writing down the functions g(x), f(x), G(x), andf 0(x).

INTEGRAL CALCULUS 18
Example 5.23 FindRxe2xdx.
Solution. In this case, both factors x and e2x are easy to integrate. Bothare also easy to differentiate, but the process of differentiation simplifies xwhile it makes e2x slightly more complicated. This suggests that you shouldtry integration by parts with
g(x) = e2x and f(x) = x.
Then,
G(x) =
Ze2xdx =
1
2e2x and f 0(x) = 1
and so Zxe2xdx =
1
2e2xx−
Z1
2e2xdx =
1
2xe2x − 1
4e2x + C =
=1
2
µx− 1
2
¶e2x + C.
Example 5.24 FindRx√x+ 5dx.
Solution. Again, both factors in the product are easy to integrate anddifferentiate. However, the factor x is simplified by differentiation, whereasthe derivative of
√x+ 5 is even more complicated than
√x+ 5 itself. This
suggests that you should try integration by parts with
g(x) =√x+ 5 and f(x) = x.
Then,
G(x) =
Z(x+ 5)
12dx =
2
3(x+ 5)
32 and f 0(x) = 1
and soZx√x+ 5dx =
2
3x(x+5)
32 − 2
3
Z(x+5)
32dx =
2
3x(x+5)
32 − 4
15(x+5)
52 +C.
Comment. Some integrals can be evaluated by either substitution orintegration by parts. For instance, the integral in Example 5.24 can be foundby substituting as follows:Let u = x+ 5. Then du = dx and x = u− 5, andZx√x+ 5dx =
Z(u− 5)√udu =
Z ³u32 − 5u 1
2
´du =
2
5u52 − 5 · 2
3u32 + C =
=2
5(x+ 5)
52 − 10
3(x+ 5)
32 + C.

INTEGRAL CALCULUS 19
This form of the integral is not the same as that found in Example 5.24.To show that the two forms are equivalent, note that the antiderivative inExample 5.24 can be expressed as
2x
3(x+ 5)
32 − 4
15(x+ 5)
52 = (x+ 5)
32
·2x
3− 4
15(x+ 5)
¸=
= (x+ 5)32
·2x
5− 43
¸= (x+ 5)
32
·2
5(x+ 5)− 10
3
¸=
=2
5(x+ 5)
52 − 10
3(x+ 5)
32
which is the form of the antiderivative obtained by substitution. This exam-ple shows that it is quite possible for you to do everything right and still notget the answer given in the solution of a problem.
Example 5.25 FindRx ln xdx.
Solution. In this case, the factor x is easy to integrate, while the factorln x is simplified by differentiation. This suggests that you try integration byparts with
g(x) = x and f(x) = ln x.
Then,
G(x) =
Zxdx =
1
2x2 and f 0(x) =
1
x
and soZx ln xdx =
1
2x2 ln x− 1
2
Zx21
xdx =
1
2x2 ln x− 1
2
Zxdx =
=1
2x2 ln x− 1
4x2 + C =
1
2x2µln x− 1
2
¶+ C.
In the next example, you will see how to use integration by parts tointegrate the natural logarithm ln x.
Example 5.26 FindRln xdx.
Solution. The trick is to write ln x as the product 1(ln x), in which the factor1 is easy to integrate and the factor ln x is simplified by differentiation. Thissuggests that you use integration by parts with
g(x) = 1 and f(x) = ln x.
Then,
G(x) =
Zdx = x and f 0(x) =
1
x

INTEGRAL CALCULUS 20
and soZlnxdx =
Z1(ln x)dx = x lnx−
Zx1
xdx = x ln x−
Z1dx =
= x ln x− x+ C = x(ln x− 1) + C.
Sometimes integration by parts leads to a new integral that also must beintegrated by parts. This situation is illustrated in the next example.
Example 5.27 FindRx2exdx.
Solution. Since the factor ex is easy to integrate and the factor x2 is sim-plified by differentiation, try integration by parts with
g(x) = ex and f(x) = x2.
Then,
G(x) =
Zexdx = ex and f 0(x) = 2x
and so Zx2exdx = x2ex − 2
Zxexdx.
To findRxexdx, you have to integrate by parts again, this time with
g(x) = ex and f(x) = x.
Then,G(x) = ex and f 0(x) = 1
and soZx2exdx = x2ex − 2
Zxexdx = x2ex − 2(xex −
Zexdx) =
= x2ex − 2(xex − ex) + C = (x2 − 2x+ 2)ex + C.

INTEGRAL CALCULUS 21
5.4 The use of Integral tablesMost of the integrals you will encounter in the social and life sciences can beevaluated using the techniques you have learned so far in this chapter. Fromtime to time, however, an integral will turn up that cannot be handled bythese techniques. For such occasions, it is helpful to know how to use a tableof integrals.A table of integrals is a list of integration formulas. Extensive tables
listing several hundred formulas can be found in most mathematical hand-books, and condensed versions appear in many calculus texts. Here is a tinysampling of the formulas that appear in a table of integrals.
A small Table of Integrals
1.R
dxp2−x2 =
12pln¯̄̄p+xp−x
¯̄̄2.R
dxx(ax+b)
= 1bln¯̄
xax+b
¯̄3.R
dx√x2±p2 = ln
¯̄̄x+
px2 ± p2
¯̄̄4.Rxneaxdx = 1
axneax − n
a
Rxn−1eaxdx
In these formulas, the letters a, b, p, and n denote constants. The termp2 in the first and third formulas may be any positive constant (since anypositive number is the square of its square root). The compact fractionalnotation dx
p2−x2 in the first formula is an abbreviation for1
p2−x2dx. Similarnotation occurs in some of the other formulas. Also, to keep the formulassimple, the constant C is omitted from each of the integral in the table. Youadd the C.For convenience, most tables of integrals are divided into sections. Inte-
grals containing similar expressions are grouped together in the same section.For example, the first formula would be found in a section entitled ”Ex-pressions Containing p2 − x2”, the second in a section called ”ExpressionsContaining ax + b”, and the fourth in the section ”Expressions ContainingExponential and Logarithmic Functions”.The use of the first three integration formulas is illustrated in the following
examples.
Example 5.28 FindR
dxx(3x−6) .
Solution. Apply the second formula with a = 3 and b = −6 to getZdx
x(3x− 6) = −1
6ln
¯̄̄̄x
3x− 6¯̄̄̄+ C.

INTEGRAL CALCULUS 22
Example 5.29 FindR
dx6−3x2 .
Solution. If the coefficient of x2 were 1 instead of 3, you could use the firstformula. This suggests that you first rewrite the integrand as
1
6− 3x2 =1
3
µ1
2− x2¶
and then apply the first formula with p =√2:Z
dx
6− 3x2 =1
3
Zdx
2− x2 =1
3
µ1
2√2
¶ln
¯̄̄̄¯√2 + x√2− x
¯̄̄̄¯+ C =
=
√2
12ln
¯̄̄̄¯√2 + x√2− x
¯̄̄̄¯+ C.
Example 5.30 FindR
dxx2+2x
.Solution. Factor the integrand as
1
x2 + 2x=
1
x(x+ 2)
and apply the second formula with a = 1 and b = 2:Zdx
x2 + 2x=
Zdx
x(x+ 2)=1
2ln
¯̄̄̄x
x+ 2
¯̄̄̄+ C.
Example 5.31 FindR
dx3x2+6
.Solution. It is natural to try to match this integral to the one in the firstformula by writing Z
dx
3x2 + 6= −1
3
Zdx
−2− x2 .
However, since −2 is negative, it cannot be written as the square p2 of anyreal number p, and so the formula does not apply.There is a formula for integrals of the form
Rdx
x2±p2 that can be used in thiscase. You can find it in a table of integrals under a heading like ”ExpressionsContaining x2 ± p2”. However, the antiderivative will be written in terms ofinverse trigonometric functions and cannot be expressed in more elementaryterms.

INTEGRAL CALCULUS 23
Example 5.32 FindR
dx√4x2−9 .
Solution. To put this integral in the form of the third formula, rewrite theintegrand as
1√4x2 − 9 =
1q4(x2 − 9
4)=
1
2qx2 − 9
4
.
Then apply the formula with p2 = 94, using minus sign in place of the symbol
±, to get Zdx√4x2 − 9 =
1
2
Zdxqx2 − 9
4
=1
2ln
¯̄̄̄¯x+
rx2 − 9
4
¯̄̄̄¯+ C.
The fourth formula expresses an integral in terms of a simpler one of thesame type. If the formula is subsequently applied to the new integral, furthersimplification may occur. Successive applications of the formula usually leadto an integral that can be found by elementary methods. A formula ofthis type is called a reduction formula. The use of reduction formulas isillustrated in the next example.
Example 5.33 FindRx2e5xdx.
Solution. Apply the fourth formula with n = 2 and a = 5 to getZx2e5xdx =
1
5x2e5xdx− 2
5
Zxe5xdx.
Now apply the fourth formula again, this time with n = 1 and a = 5, to getZxe5xdx =
1
5xe5x − 1
5
Ze5xdx =
1
5xe5x − 1
25e5x + C.
Combine these results to conclude thatZx2e5xdx =
1
5x2e5xdx− 2
5
µ1
5xe5x − 1
25e5x¶+ C =
=1
5
µx2 − 2
5x+
2
25
¶e5x + C.
No special formula was really needed to find the integral in Example5.33. You could have found this integral quite easily using integration byparts. Indeed, if the formula had not been so conveniently displayed at thebeginning of this section, you would have been much better off integrating byparts directly than hunting through a table of integrals for the appropriate
INTEGRAL CALCULUS 24
formula. Try not to succumb to the temptation to rely excessively on tableswhen computing integrals. Most of the integrals you will encounter can befind quite easily without the aid of formulas. Moreover, before you can usea formula, you must find it, and this can be time-consuming. In general, itis good strategy to use a table of integrals only as a last resort.
INTEGRAL CALCULUS 25
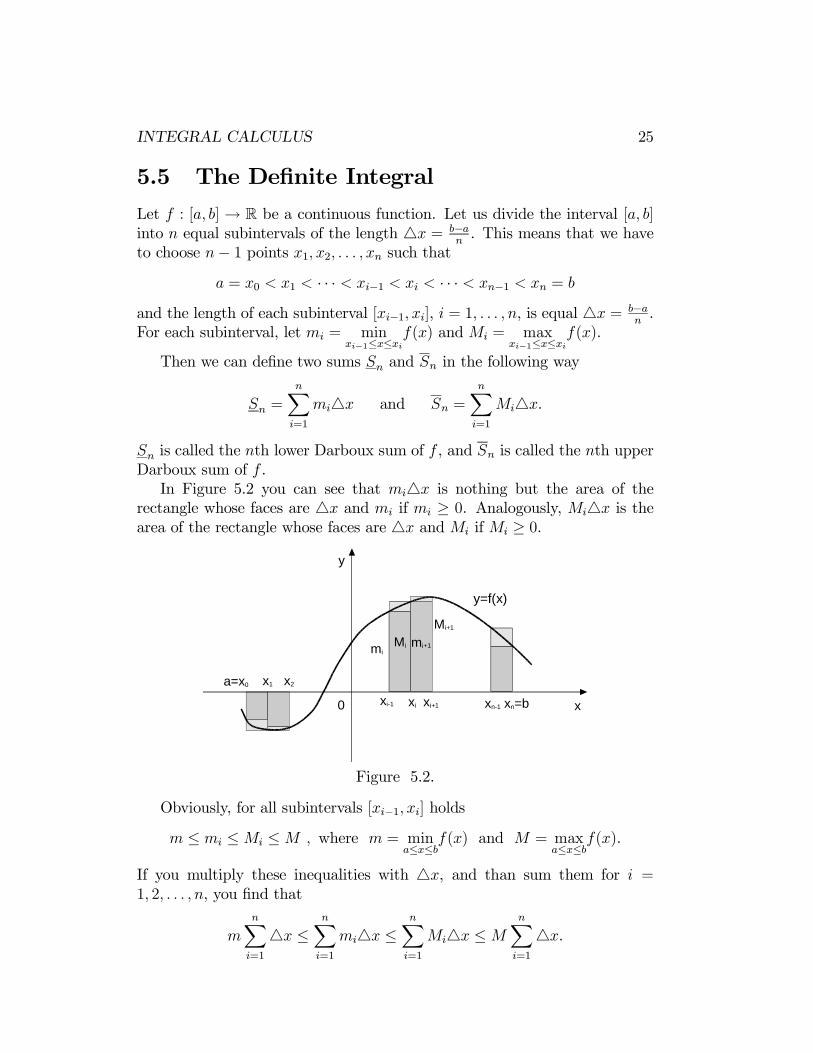
5.5 The Definite IntegralLet f : [a, b] → R be a continuous function. Let us divide the interval [a, b]into n equal subintervals of the length 4x = b−a
n. This means that we have
to choose n− 1 points x1, x2, . . . , xn such thata = x0 < x1 < · · · < xi−1 < xi < · · · < xn−1 < xn = b
and the length of each subinterval [xi−1, xi], i = 1, . . . , n, is equal 4x = b−an.
For each subinterval, let mi = minxi−1≤x≤xi
f(x) and Mi = maxxi−1≤x≤xi
f(x).
Then we can define two sums Sn and Sn in the following way
Sn =nXi=1
mi4x and Sn =nXi=1
Mi4x.
Sn is called the nth lower Darboux sum of f , and Sn is called the nth upperDarboux sum of f .In Figure 5.2 you can see that mi4x is nothing but the area of the
rectangle whose faces are 4x and mi if mi ≥ 0. Analogously, Mi4x is thearea of the rectangle whose faces are 4x and Mi if Mi ≥ 0.
x1 x2
xi-1 xi xi+1 xn-1 xn=b
y
0
miMi mi
Mi+1
+1
a=x0
x
y=f(x)
Figure 5.2.
Obviously, for all subintervals [xi−1, xi] holds
m ≤ mi ≤Mi ≤M , where m = mina≤x≤b
f(x) and M = maxa≤x≤b
f(x).
If you multiply these inequalities with 4x, and than sum them for i =1, 2, . . . , n, you find that
mnXi=1
4x ≤nXi=1
mi4x ≤nXi=1
Mi4x ≤MnXi=1
4x.
INTEGRAL CALCULUS 26
SincenXi=1
4x = n4x = nb− an
= b− a,
you havem(b− a) ≤ Sn ≤ Sn ≤M(b− a).
This means that the set of all lower (upper) nth Darboux sums of a contin-uous function is bounded. Then, there exist
limn→∞
nXi=1
mi4x = limSnn→∞
= I and limn→∞
nXi=1
Mi4x = limSnn→∞
= I.
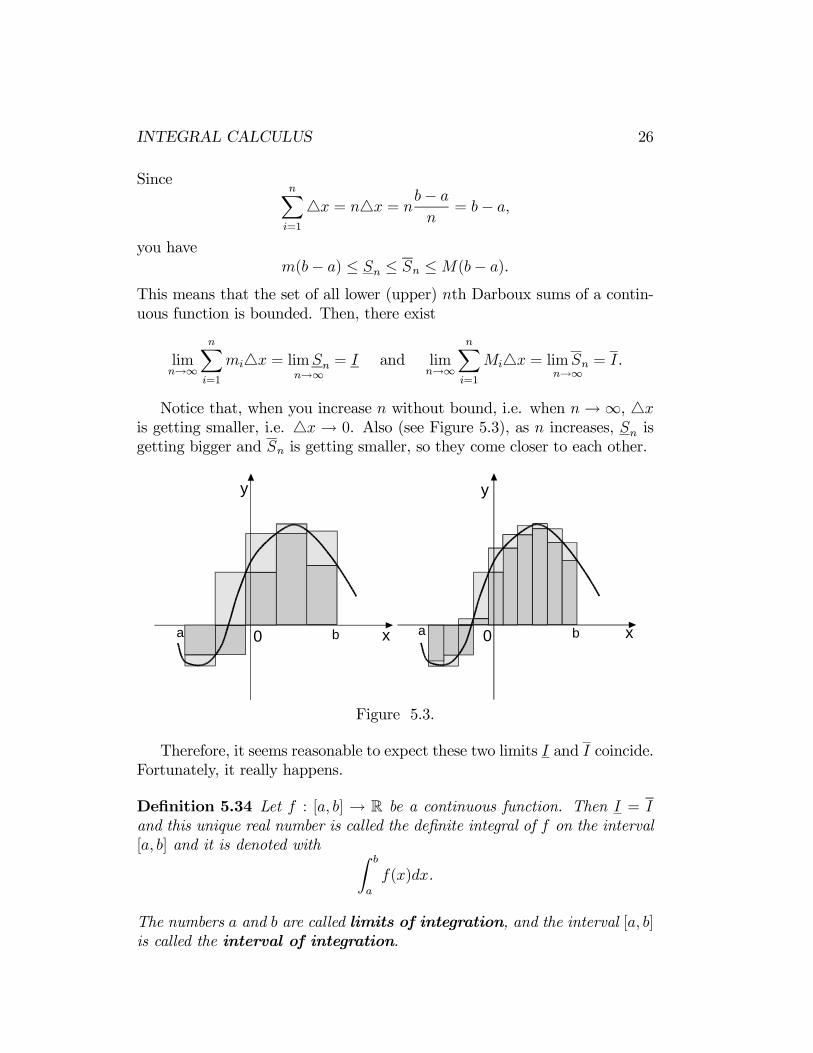
Notice that, when you increase n without bound, i.e. when n→∞, 4xis getting smaller, i.e. 4x → 0. Also (see Figure 5.3), as n increases, Sn isgetting bigger and Sn is getting smaller, so they come closer to each other.
a b x
y
xb 00a
y
Figure 5.3.
Therefore, it seems reasonable to expect these two limits I and I coincide.Fortunately, it really happens.
Definition 5.34 Let f : [a, b] → R be a continuous function. Then I = Iand this unique real number is called the definite integral of f on the interval[a, b] and it is denoted with Z b
a
f(x)dx.
The numbers a and b are called limits of integration, and the interval [a, b]is called the interval of integration.

INTEGRAL CALCULUS 27
Example 5.35 FindR 40xdx.
Solution. Since the function f(x) = x is continuous on the interval [0, 4]Z 4
0
xdx = limn→∞
Sn = limn→∞
Sn.
Since 4x = 4−0n= 4
n, and Mi = max
xi−1≤x≤xif(x) = f(xi) = xi = x0 + i4x = i 4n
for all subintervals [xi−1, xi], you have
Sn =nXi=1
Mi4x =µ14
n+ 2
4
n+ · · ·+ n4
n
¶4
n=
·(1 + 2 + · · ·+ n) 4
n
¸4
n=
=n(n+ 1)
2
16
n2= 8
n+ 1
n
andlimn→∞
Sn = limn→∞
8n+ 1
n= 8.
(Recall that (1 + 2 + · · ·+ k) = k(k+1)2, for k ∈ N.)
On the other hand, mi = minxi−1≤x≤xi
f(x) = f(xi−1) = xi−1 = x0+(i− 1)4x =(i− 1) 4
n. Therefore
Sn =nXi=1
mi4x =µ04
n+ 1
4
n+ · · ·+ (n− 1) 4
n
¶4
n=
=(n− 1)n
2
16
n2= 8
n− 1n
andlimn→∞
Sn = limn→∞
8n− 1n
= 8.
So you can see that limn→∞
Sn = limn→∞
Sn = 8 andZ 4
0
xdx = 8.
Geometric interpretation
Suppose that f : [a, b] → R is continuous and nonnegative on the interval[a, b]. Then the Darboux sums Sn and Sn are approximations to the areaunder the curve y = f(x) between a and b. As n increases, these approxima-tions are becoming better. Since the function f is integrable on the interval[a, b], the
R baf(x)dx is equal to the area under the curve y = f(x) between a
and b.

INTEGRAL CALCULUS 28
Relationship between the definite integraland the indefinite integral
This relationship is called Newton-Leibniz formula, and it is given by thefollowing theorem, which we will leave without proof.
Theorem 5.36 Let f : [a, b]→ R be a continuous function. ThenZ b
a
f(x)dx = F (b)− F (a),
where F : [a, b]→ R is an arbitrary antiderivative of f .
It is common and convenient to use the symbol F (x)¯̄ba to stand for the
difference F (b)− F (a).Example 5.37 Find
R 40xdx.
Solution. Since the function f(x) = x has the primitive function F (x) =12x2 + C, you haveZ 4
0
xdx =
µ1
2x2 + C
¶¯̄̄̄40
=
µ1
216 + C
¶−µ1
20 + C
¶=
= 8 + C − C = 8.
Comment. Notice what happens to the constant C in the evaluation ofa definite integral. It appears in the expressions for both F (b) and F (a)and is eventually eliminated by the subtraction. You may therefore omit theconstant C altogether when evaluating definite integrals.Using the Newton-Leibniz formula, you can prove some of the following
rules for the definite integral.
Basic rules
1.R aaf(x)dx = 0.
2.R abf(x)dx = − R b
af(x)dx (a < b).
3.R bacf(x)dx = c
R baf(x)dx.
4.R ba[f1(x) + f2(x) + · · · + fn(x)]dx =
R baf1(x)dx +
R baf2(x)dx + · · · +R b
afn(x))dx.
5.R baf(x)dx =
R caf(x)dx+
R bcf(x)dx (a < c < b).

INTEGRAL CALCULUS 29
6.R baf(x)dx ≥ 0 for f(x) ≥ 0 on the interval [a, b] (a < b).
7.R baf(x)dx ≤ R b
ag(x)dx if f(x) ≤ g(x) on the interval [a, b] (a < b).
Here are two practical problems whose solutions are definite integrals.
Example 5.38 A study indicates that x months from now the populationof a certain town will be increasing at the rate of 2+6
√x people per month.
By how much will the population of the town increase during the next 4months?Solution. Let P (x) denote the population of the town x months from now.Then the rate of change of the population with respect to time is
dP
dx= 2 + 6
√x,
and the amount by which the population will increase during the next 4months is the definite integral
P (4)− P (0) =
Z 4
0
¡2 + 6
√x¢dx =
³2x+ 4x
32
´¯̄̄40=
= (8 + 36)− (0 + 0) = 40 people.
Example 5.39 In a certain community, the demand for gasoline is increas-ing exponentially at the rate of 5 percent per year. If the current demandis 4 million gallons per year, how much gasoline will be consumed in thecommunity during the next 3 years?Solution. Let Q(t) denote the total consumption (in million gallon units)of gasoline in the community over the next t years. Then the demand (mil-lion gallons per year) is the rate of change dQ
dtof the total consumption with
respect to time. The fact that this demand is increasing exponentially at therate of 5 percent per year and is currently equal to 4 million gallons per yearimplies that
dQ
dt= 4e0.05t million gallons per year.
Hence, the total consumption during the next 3 years is the definite integral
Q(3)−Q(0) =
Z 3
0
4e0.05tdt = 80e0.05t¯̄30= 80
¡e0.15t − 1¢
' 12.95 million gallons.
INTEGRAL CALCULUS 30
5.5.1 Substitution in the Definite Integral
As for the indefinite integral, you can change the variable of integration inthe definite integral. After you changed the variable, you can evaluate thedefinite integral in one of two ways. Either you can rewrite the antiderivativein terms of the old variable, or you can change limits of integration. Probablythe most efficient approach is to adopt the second alternative which is basedon the next theorem.
Theorem 5.40 Suppose that function f : [a, b] → R is continuous on theinterval [a, b] and the function g : [α,β]→ [a, b] is continuously derivable onthe interval [α, β], where g(α) = a, g(β) = b. ThenZ b
a
f(x)dx =
Z β
α
f(g(u))g0(u)du.
Proof. Let Z b
a
f(x)dx = F (b)− F (a), F 0(x) = f(x)
Z β
α
f(g(u))g0(u)du = G(β)−G(α), G0(u) = f(g(u))g0(u).
Since G0(u) = (F (g(u)))0, it follows G(u) = F (g(u)) + C. Hence,
G(β)−G(α) = F (g(β))− F (g(α)) = F (b)− F (a).
Example 5.41 EvaluateR 108x(x2 + 1)3dx.
Solution. The integrand is a product in which one factor 8x is a constantmultiple of the derivative of an expression x2 + 1 that appears in the otherfactor. This suggests that you let u = x2 + 1. Then du = 2xdx, and soZ
8x(x2 + 1)3dx =
Z4u3du = u4 + C.
If you choose to rewrite the antiderivative in terms of x, you find thatZ8x(x2 + 1)3dx = u4 + C = (x2 + 1)4 + C
and so Z 1
0
8x(x2 + 1)3dx = (x2 + 1)4¯̄10= 16− 1 = 15.

INTEGRAL CALCULUS 31
If you choose to change limits of integration, then you conclude that u = 1when x = 0 and u = 2 when x = 1. Hence,Z 1
0
8x(x2 + 1)3dx =
Z 2
1
4u3du = u4¯̄21= 16− 1 = 15.
Example 5.42 EvaluateR e1lnxxdx.
Solution. The integrand can be written as the product (lnx) 1xin which one
of the factors 1xis the derivative of the other ln x. This suggests that you let
u = ln x. Then du = 1xdx, u(1) = 0, and u(e) = 1. Hence,Z e
1
ln x
xdx =
Z 1
0
udu =1
2u2¯̄̄̄10
=1
2− 0 = 1
2.
5.5.2 Integration by Parts in the Definite Integral
The formula for integration by parts can be rephrased for definite integralsas follows. Z b
a
f(x)g(x)dx = f(x)G(x)¯̄ba −
Z b
a
f 0(x)G(x)dx
where G is an antiderivative of g.Here are two examples.
Example 5.43 EvaluateR ln 20xexdx.
Solution. Both factors x and ex are easy to integrate, while the factor x issimplified by differentiation. This suggests that you try integration by partswith
g(x) = ex and f(x) = x
Then,G(x) = ex and f 0(x) = 1
and so Z ln 2
0
xexdx = xex¯̄ln 20 −
Z ln 2
0
exdx = (xex − ex) ¯̄ln 20 =
= (2 ln 2− 2)− (0− 1) = 2 ln 2− 1.
INTEGRAL CALCULUS 32
Example 5.44 EvaluateR e1x lnxdx.
Solution. Since the factor x is easy to integrate and the factor ln x issimplified by differentiation, try integration by parts with
g(x) = x and f(x) = lnx
Then,
G(x) =1
2x2 and f 0(x) =
1
x
and soZ e
1
x lnxdx =1
2x2 ln x
¯̄̄̄e1
− 12
Z e
1
x21
xdx =
1
2x2 ln x
¯̄̄̄e1
− 12
Z e
1
xdx =
=
µ1
2x2 ln x− 1
4x2¶¯̄̄̄e
1
=
µ1
2e2 ln e− 1
4e2¶−µ1
2ln 1− 1
4
¶=
=1
2e2 − 1
4e2 +
1
4=1
4
¡e2 + 1
¢.
INTEGRAL CALCULUS 33
5.6 Area and IntegrationAs you can see in the previous section, if a function f : [a, b] → R is con-tinuous and nonnegative on the interval [a, b], then the region R under thegraph of f between x = a and x = b (see Figure 5.4) has area A equal to thedefinite integral
R baf(x)dx.
0
y
xa b
y=f(x)
Figure 5.4.
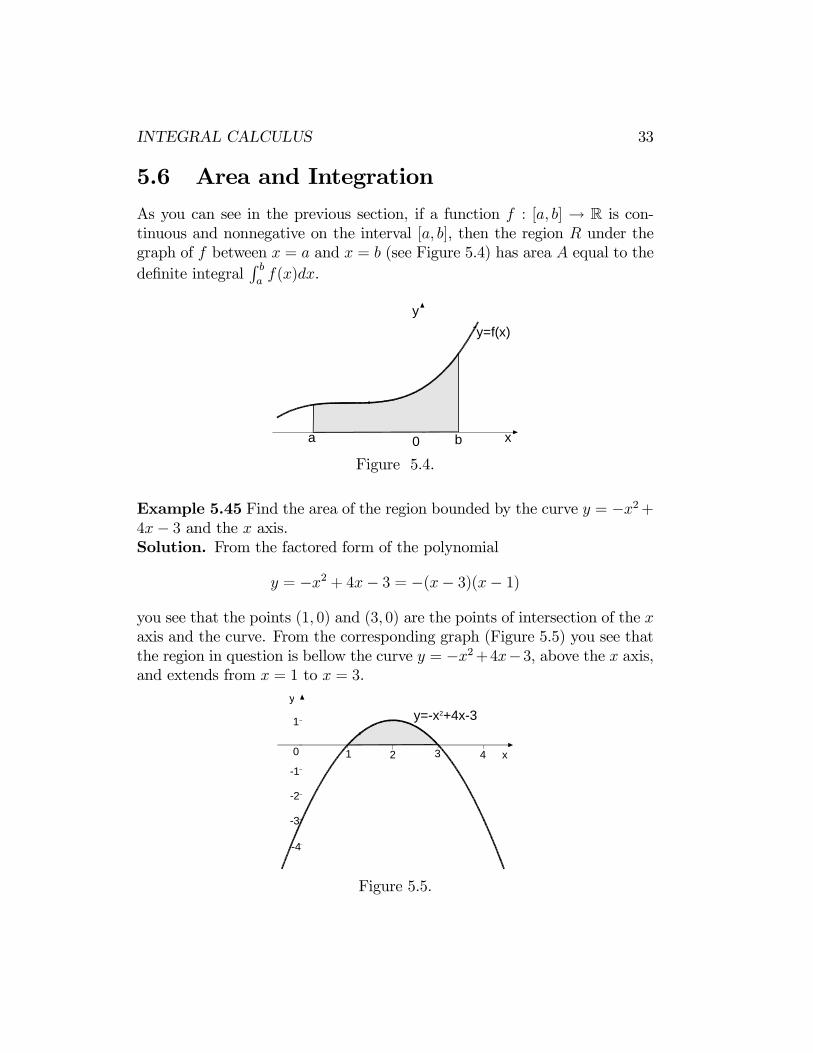
Example 5.45 Find the area of the region bounded by the curve y = −x2+4x− 3 and the x axis.Solution. From the factored form of the polynomial
y = −x2 + 4x− 3 = −(x− 3)(x− 1)
you see that the points (1, 0) and (3, 0) are the points of intersection of the xaxis and the curve. From the corresponding graph (Figure 5.5) you see thatthe region in question is bellow the curve y = −x2+4x−3, above the x axis,and extends from x = 1 to x = 3.
-3
-2
-1
0
1
y
1 2 3 4 x
-4
y=-x2+4x-3
Figure 5.5.

INTEGRAL CALCULUS 34
Hence,
A =
Z 3
1
(−x2 + 4x− 3)dx =µ−13x3 + 2x2 − 3x
¶¯̄̄̄31
=
= (−9 + 18− 9)−µ−13+ 2− 3
¶=4
3.
The region in the next example is not bounded above by a single curve.However, it can be broken into two regions that are, and the area of each canbe computed using the integral formula.
Example 5.46 Find the area of the region R in the first quadrant that linesunder the curve y = 1
xand is bounded by this curve and the lines y = x,
y = 0, and x = 2.Solution. First sketch the region as shown in Figure 5.6. Note that thecurve y = 1
xand the line y = x intersect at the point (1, 1).
0
1
2
3
4
y
1 2 3 4 x
y=x
y= 1x
Figure 5.6.
Observe that to the left of x = 1, R is bounded above by the line y = x,while to the right of x = 1, it is bounded by the curve y = 1
x. This suggests
that you break R into two subregions, R1 and R2, as shown in Figure 5.6,and apply the integral formula for area to each subregion separately. Inparticular,
A1 =
Z 1
0
xdx =1
2x2¯̄̄̄10
=1
2
and
A2 =
Z 2
1
1
xdx = ln |x||21 = ln 2− ln 1 = ln 2
A = A1 + A2 =1
2+ ln 2 ' 1.19.

INTEGRAL CALCULUS 35
In some particular problems you may have to compute the area betweentwo curves. Suppose that functions f, g : [a, b] → R are continuous andnonnegative, and that f(x) ≥ g(x) on the interval [a, b] as shown in Figure5.7.
0
y
xa b
y=g(x)
y=f(x)
Figure 5.7.
To find the area of the region R between the curves y = g(x) and y = f(x)from x = a to x = b, you simply subtract the area under the lower curvey = g(x) from the area under the upper curve y = f(x). That is,
A =
Z b
a
f(x)dx−Z b
a
g(x)dx =
Z b
a
[f(x)− g(x)]dx.
It can be shown that this formula remains valid even if the functions f andg are not assumed to be nonnegative.Here are three examples.
Example 5.47 Find the area of the region bounded by the curves y = x2+1and y = 2x− 2 between x = −1 and x = 2.Solution. So that you can visualize the situation, begin by sketching theregion as shown in Figure 5.8.
-4
-20
2
4
6
8
y
-2 2 x-1 1
y=2x-2
y=x2+1
Figure 5.8.

INTEGRAL CALCULUS 36
Then apply the integral formula with f(x) = x2 + 1, g(x) = 2x − 2,a = −1, and b = 2 to get
A =
Z 2
−1[(x2 + 1)− (2x− 2)]dx =
Z 2
−1(x2 − 2x+ 3)dx =
=
µ1
3x3 − x2 + 3x
¶¯̄̄̄2−1=14
3−µ−133
¶= 9.
Example 5.48 Find the area of the region bounded by the curves y = x3
and y = x2.Solution. Sketch the curves as shown in Figure 5.9. Find the points ofintersection by solving the equations of the two curves simultaneously to get
x3 = x2 x3 − x2 = 0 x2(x− 1) = 0x = 0 and x = 1.
The corresponding points (0, 0) and (1, 1) are the points of intersection.
-10
1
2
4
y
-1 -0.5 0.5 1 1.5 2 x
3y=x2
y=x3
Figure 5.9.
Notice that for 0 ≤ x ≤ 1, the graph of y = x2 lies above that of y = x3(since the square of a fraction between 0 and 1 is greater than its cube).Hence, the region in question is bounded above by the curve y = x2 andbelow by the curve y = x3 and extends from x = 0 to x = 1. Hence,
A =
Z 1
0
(x2 − x3)dx =µ1
3x3 − 1
4x4¶¯̄̄̄1
0
=1
12.
Example 5.49 Find the area of the region bounded by the curves y = x3−xand y = x2 + x.Solution. First make a rough sketch of the two curves as shown in Figure

INTEGRAL CALCULUS 37
5.10. You find the points of intersection by solving the equations of the twocurves simultaneously to get
x3 − x = x2 + x x3 − x2 − 2x = 0 x(x+ 1)(x− 2) = 0x = 0, x = −1 and x = 2.
0
2
4
6
8
y
-2 -1 1 2 x
y=x3-xy=x2+x
Figure 5.10.
The region whose area you wish to compute lies between x = −1 andx = 2, but since the two curves cross at x = 0, neither curve is always abovethe other between x = −1 and x = 2. However, since the curve y = x3−x isabove y = x2 + x between x = −1 and x = 0, and since y = x2 + x is abovey = x3 − x between x = 0 and x = 2, it follows that the area of the regionbetween x = −1 and x = 0, is
A1 =
Z 0
−1
£¡x3 − x¢− ¡x2 + x¢¤ dx = Z 0
−1
¡x3 − x2 − 2x¢ dx =
=
µ1
4x4 − 1
3x3 − x2
¶¯̄̄̄0−1=5
12
and the area of the region between x = 0 and x = 2, is
A2 =
Z 2
0
£¡x2 + x
¢− ¡x3 − x¢¤ dx = Z 2
0
¡−x3 + x2 + 2x¢ dx ==
µ−14x4 +
1
3x3 + x2
¶¯̄̄̄20
=8
3.
Thus, the total area is the sum
A = A1 +A2 =5
12+8
3=37
12.

INTEGRAL CALCULUS 38
5.7 Appendix
5.7.1 A Short Table of Integrals
• Forms Involving a+ bx
1.R
xdxa+bx
= 1b2|a+ bx− a ln |a+ bx||+ C
2.Rx2dxa+bx
= 12b3[(a+ bx)2 − 4a(a+ bx) + 2a2 ln |a+ bx|] + C
3.R
xdx(a+bx)2
= 1b2
£a
a+bx+ ln |a+ bx|¤+ C
4.R
xdx√a+bx
= 23b2(bx− 2a)√a+ bx+ C
5.R
dxx√a+bx
= 1√aln¯̄̄√
a+bx−√a√a+bx+
√a
¯̄̄+ C a > 0
6.R
dxx(a+bx)
= 1aln¯̄
xa+bx
¯̄+ C
7.R
dxx2(a+bx)
= −1a
£1x+ b
aln¯̄
xa+bx
¯̄¤+ C
8.R
dxx2(a+bx)2
= −1a2
ha+2bxx(a+bx)
+ 2baln¯̄
xa+bx
¯̄i+ C
• Forms Involving √a2 + x2
9.R √
a2 + x2dx = x2
√a2 + x2 + a2
2ln¯̄x+√a2 + x2
¯̄+ C
10.R
dx√a2+x2
= ln¯̄x+√a2 + x2
¯̄+ C
11.R
dxx√a2+x2
= −1aln¯̄̄√
a2+x2+ax
¯̄̄+ C
12.R
dx
(a2+x2)32= x
a2√a2+x2
+ C
13.Rx2√a2 + x2dx = x
8(a2+2x2)
√a2 + x2− a4
8ln¯̄x+√a2 + x2
¯̄+C
• Forms Involving √a2 − x2
14.R
dxx√a2−x2 = −1
aln¯̄̄a+√a2−x2x
¯̄̄+ C
15.R
dxx2√a2−x2 =
√a2−x2a2x
+ C
16.R
dxa2−x2 =
12aln¯̄a+xa−x¯̄+ C
17.R √
a2−x2x
dx =√a2 − x2 − a ln
¯̄̄a+√a2−x2x
¯̄̄+ C
• Forms Involving √x2 − a2

INTEGRAL CALCULUS 39
18.R √
x2 − a2dx = x2
√x2 − a2 − a2
2ln¯̄x+√x2 − a2¯̄+ C
19.R √
x2−a2x2
dx = −√x2−a2x
+ ln¯̄x+√x2 − a2¯̄+ C
20.R
dx√x2−a2 = ln
¯̄x+√x2 − a2¯̄+ C
21.R
dxx2√x2−a2 =
√x2−a2a2x
+ C
• Forms Involving eax and ln x
22.Rxeaxdx = 1
a2(ax− 1)eax + C
23.R
dxb+eax
= xb− 1
abln |b+ eax|+ C
24.Rln xdx = x ln |x|− x+ C
25.R
dxx lnx
= ln |ln x|+ C26.
Rxm lnxdx = xm+1
m+1
¡ln x− 1
m+1
¢+ C m 6= −1
• Reduction Formulas
27.Rxneaxdx = 1
axneax − n
a
Rxn−1eaxdx
28.Reax
xndx = − 1
n−1eax
xn−1 +an−1
Reax
xn−1dx for n 6= 129.
R(ln x)ndx = x(ln x)n − n R (ln x)n−1dx
30..Rxn√a+ bxdx = 2
b(2n+3)
hxn(a+ bx)
32 − na R xn−1√a+ bxdxi for
n 6= −32