underwater gliding and undulatory swimming after the · pdf fileunderwater gliding and...
TRANSCRIPT
Underwater gliding and undulatory
swimming after the start
Biomechanics and motor control approaches
Marc Elipot
French Swimming Federation – Research Department
University of Paris Descartes
French Institute of Sport (INSEP) – Performance Analysis Department
Philippe Hellard, Gilles Dietrich and Nicolas Houel
Some facts
Why we built a 10 years research and training program
A few facts :
- During the 50m Freestyle at the Athens OG, the difference in time between
the 3 medallists was 0,11s at the end of the race while it had already reached
0,10s after the 15th meter.
- In 2004 – 2006: French athletes scored some of the worse start times during
international events
Some facts
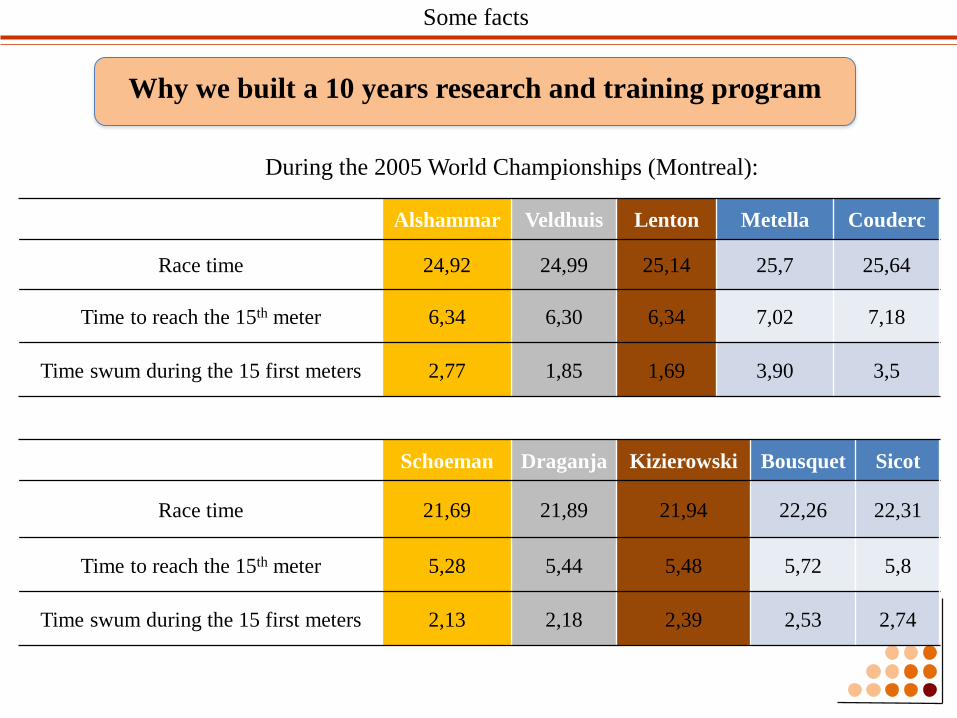
During the 2005 World Championships (Montreal):
Alshammar Veldhuis Lenton Metella Couderc
Race time 24,92 24,99 25,14 25,7 25,64
Time to reach the 15th meter 6,34 6,30 6,34 7,02 7,18
Time swum during the 15 first meters 2,77 1,85 1,69 3,90 3,5
Schoeman Draganja Kizierowski Bousquet Sicot
Race time 21,69 21,89 21,94 22,26 22,31
Time to reach the 15th meter 5,28 5,44 5,48 5,72 5,8
Time swum during the 15 first meters 2,13 2,18 2,39 2,53 2,74
Why we built a 10 years research and training program

Consequences
As a result of those observations we started in 2006 a brand new program to
improve french athletes performances during starts
- Program research aiming:1- To produce a biomechanical analysis of the start (aerial and underwater phases)
2- To gather knownledge on how the underwater undulatory movements are produced,
controled and learned
- Performance evaluation team using new technologies to measure start
performance
- Applied communications, coaches education, …
Why we built a 10 years research and training program
What we knew
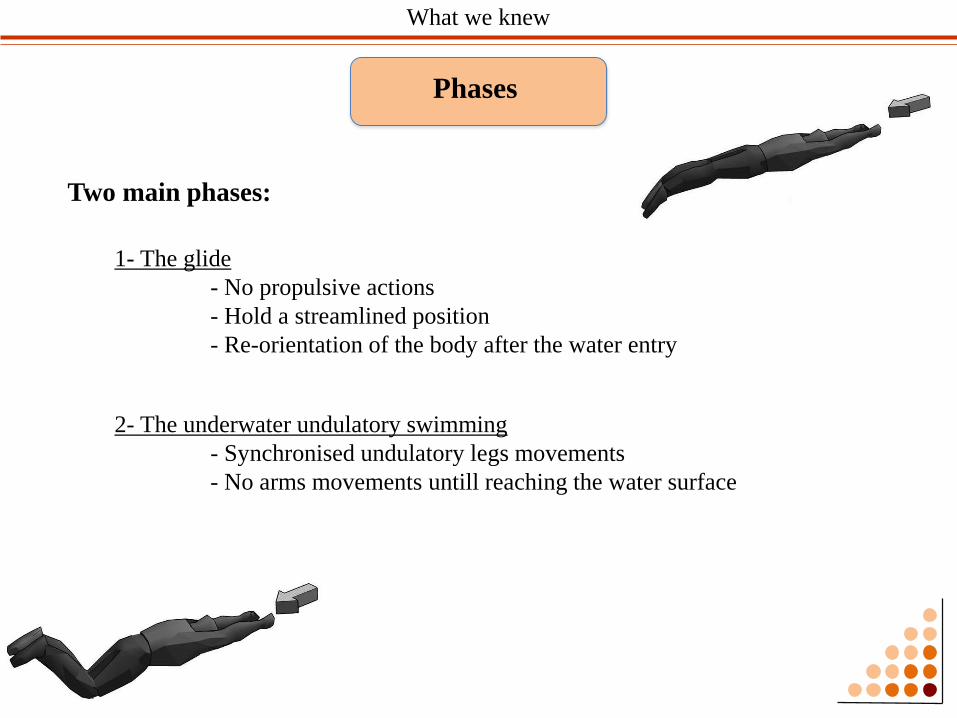
Two main phases:
Phases
1- The glide
- No propulsive actions
- Hold a streamlined position
- Re-orientation of the body after the water entry
2- The underwater undulatory swimming
- Synchronised undulatory legs movements
- No arms movements untill reaching the water surface
What we knew
Objectives
Main objectives
1- The glide :Maintain as long as possible the over-speed collected during to the previous phases of the start
- Decrease the hydrodynamic resistances
- Smooth re-orientation of the body from the initial position after the water entry to a
position suitable for the underwater propulsion
2- The underwater undulatory swimming :Maintain a velocity higher than the maximal surface swimming velocity (untill the 15th meter)
- Decrease the hydrodynamic resistances
- Increase the propulsive forces
- Build an appropriate trajectory to assure a smooth return to the surface
What we knew
Which factors have to be controlled ?
To decrease the hydrodynamic resistances
- Posture and position
(body full extension, ventral vs lateral position, …)
- Depth of the swimmer body
- Anthropometric data
- Limbs’ angles of attack
Form drag
Vawe drag
Frictional drag
Hydrodynamic resistances

What we knew
Orientation of the limb according to
the water dispacement
or the velocity vector of the swimmer’s centre of mass
Angles of attack
Velocity vector
Direction of the water displacement
Important angle of attack
Small angle of attack
Angle of attack = 90° Angle of attack = 45° Angle of attack = 0°

What we knew
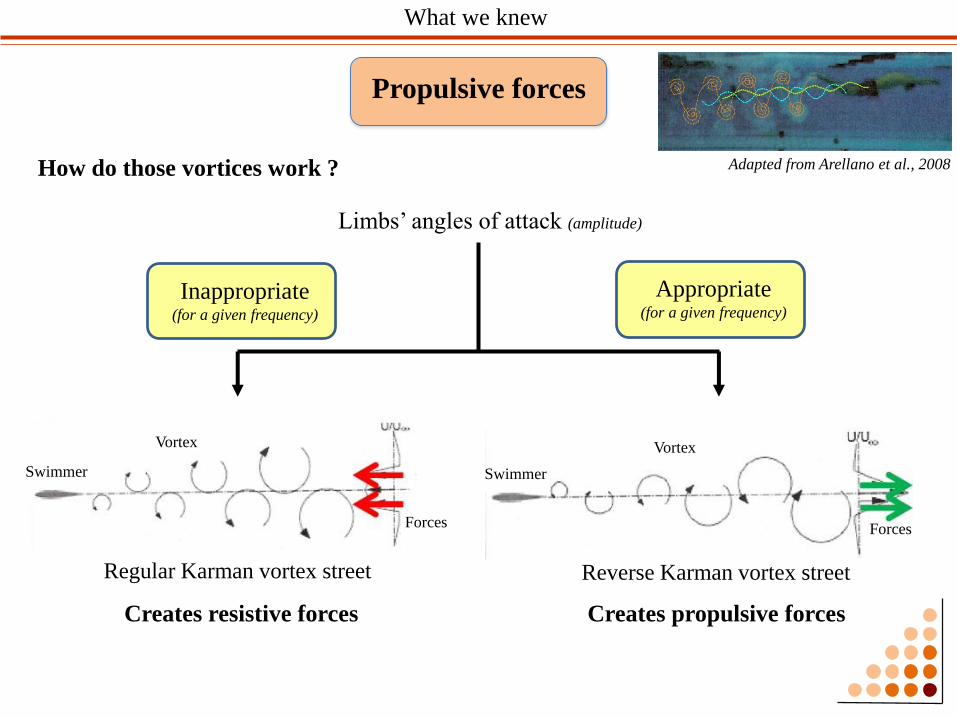
Propulsive forces
How propulsive forces are created ?
Creation of a Karman vortex street
Adapted from Arellano et al., 2008
Undulatory movements create vortices behind the
swimmer’s feets
What we knew
Propulsive forces
How do those vortices work ?
Limbs’ angles of attack (amplitude)
Adapted from Arellano et al., 2008
Inappropriate(for a given frequency)
Appropriate(for a given frequency)
Regular Karman vortex street Reverse Karman vortex street
Creates resistive forces Creates propulsive forces
Swimmer Swimmer
Vortex Vortex
Forces Forces
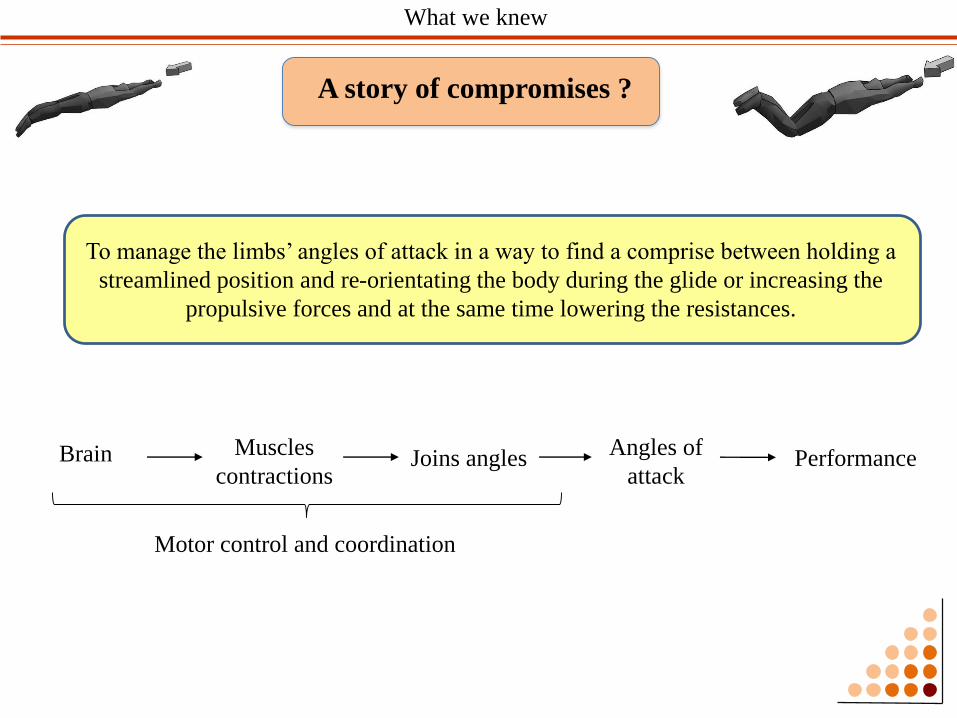
To manage the limbs’ angles of attack in a way to find a comprise between holding a
streamlined position and re-orientating the body during the glide or increasing the
propulsive forces and at the same time lowering the resistances.
A story of compromises ?
Performance
What we knew
Angles of
attackJoins angles
Muscles
contractionsBrain
Motor control and coordination

Biomechanical measurements during the glide
Energy wasted during 70% of the underwater phase of the start
Vel
icit
y (
m.s
-1)
Kin
etic
en
erg
y o
utp
ut
(J ✖️
10
4)
Underwater distance (m) Underwater distance (m)
Swimmers’ efficiency during the underwater phase of the start
Velocities comparisonInternal and external kinetic energy comparison
Starts with underwater undulatory movements Starts without underwater undulatory movements
(hold a streamlined position as long as possible)
Measurements done in 2006/2007 on top french swimmers
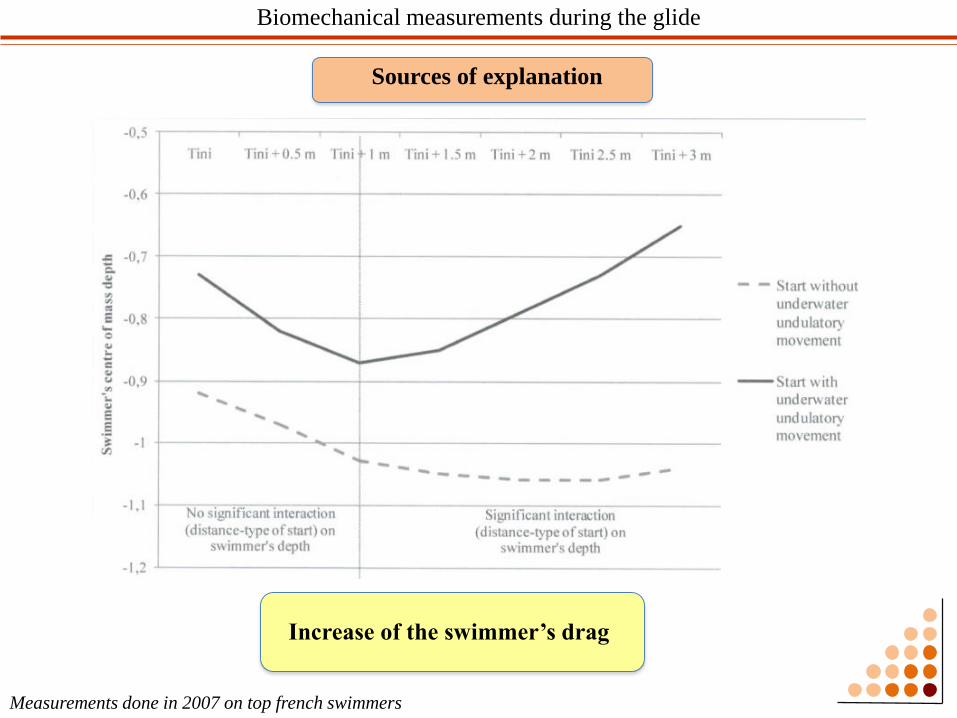
Biomechanical measurements during the glide
Sources of explanation
Measurements done in 2007 on top french swimmers
Increase of the swimmer’s drag

Biomechanical measurements during the glide
Sources of explanation
Measurements done in 2007 on top french swimmers
Speed threshold (Lyttle et al., 2000)
Optimal CM position around 6m Optimal head position around 6,5m

Biomechanical measurements during the glide
Sources of explanation
Measurements done in 2007 on top french swimmers
By initiating the legs propulsion too early, swimmers :
1- Create higher hydrodynamic resistances
2- Lose very quickly the extra-velocity obtained thanks to previous phases of the start
3- Waste energy
Optimal distance from
which legs propulsion has
to be initiated (m)
Real distance from
which legs propulsion
are initiated (m)
Difference (m)
Mean 5,8 4,09 1,69
SD 0,56 0,53 0,75
Problem to be fixed
General representation Take the appropriate information
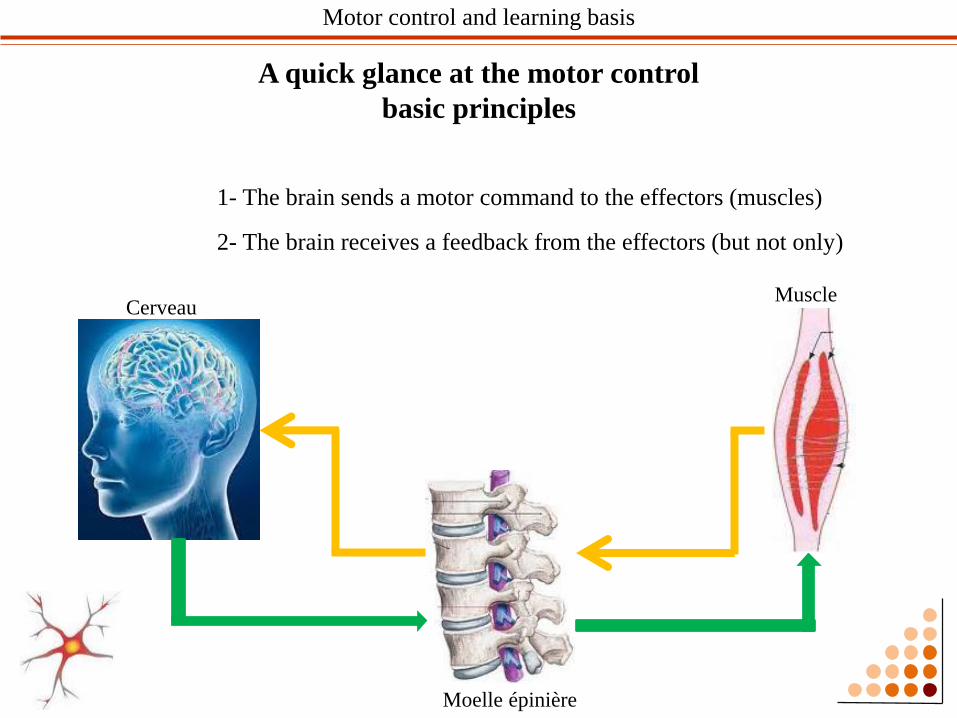
A quick glance at the motor control
basic principles
CerveauMuscle
Moelle épinière
1- The brain sends a motor command to the effectors (muscles)
2- The brain receives a feedback from the effectors (but not only)
Motor control and learning basis
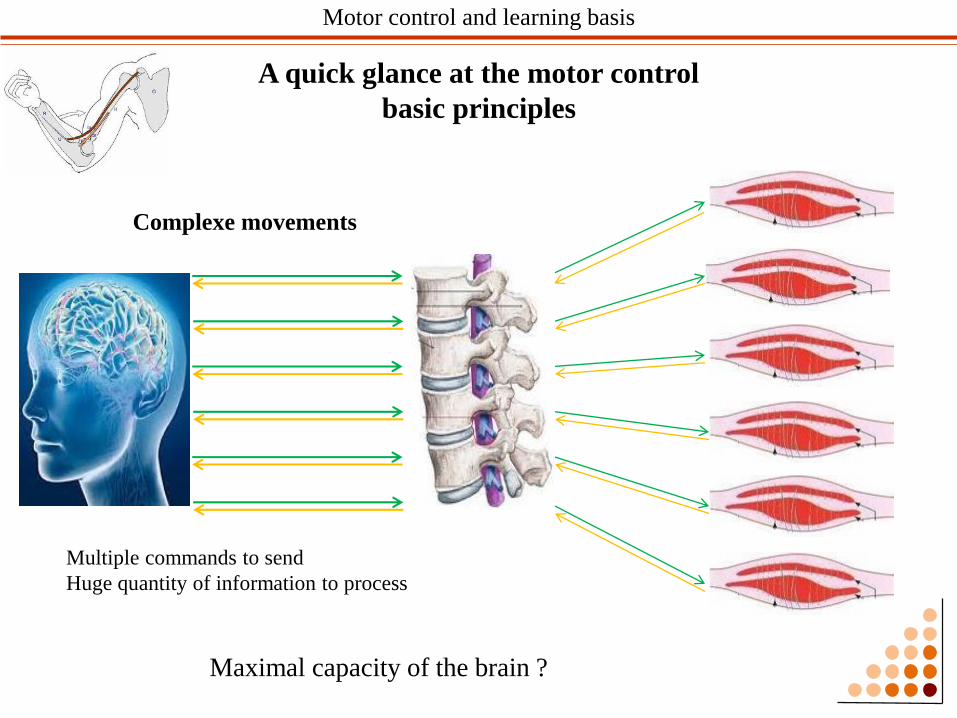
Complexe movements
Multiple commands to send
Huge quantity of information to process
Maximal capacity of the brain ?
A quick glance at the motor control
basic principles
Motor control and learning basis

Creation of a group of muscles and joins controlled thanks
only 1 motor command (task sharing)
Simplification = Optimisation
Motor control and learning basis
A quick glance at the motor control
basic principles
Complexe movements
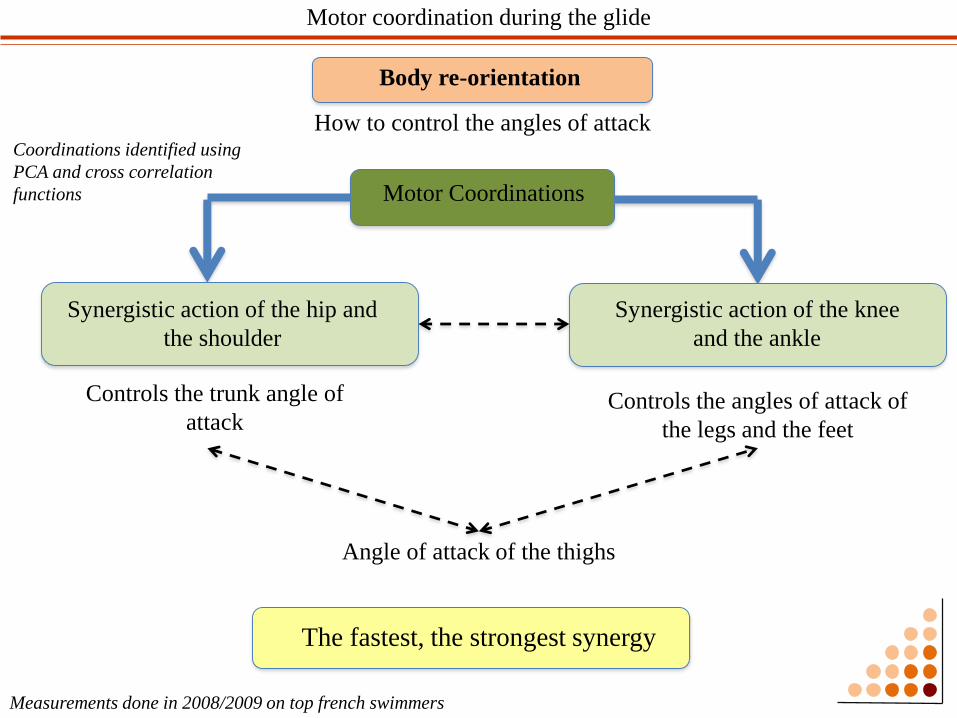
Motor coordination during the glide
Body re-orientation
Measurements done in 2008/2009 on top french swimmers
How to control the angles of attack
Motor Coordinations
Synergistic action of the hip and
the shoulder
Synergistic action of the knee
and the ankle
Controls the trunk angle of
attackControls the angles of attack of
the legs and the feet
Angle of attack of the thighs
Coordinations identified using
PCA and cross correlation
functions
The fastest, the strongest synergy

Motor coordination during the legs propulsion
Legs movements
Measurements done in 2009/2010 on top french swimmers
How to control the angles of attack
Actions of the hip and the ankle
Action of the knee
Angle of attack of the thigh Angle of attack of the trunk
Coordinations identified using
PCA and cross correlation
functions
The fastest, the strongest synergy
Angle of attack of the feet1 synergy

Motor coordination during the legs propulsion
Measurements done in 2009/2010 on top french swimmers
Legs movements
A) Streamlined position B) Upbeat beginning C) End of the upbeat
D) Downbeat beginning E) End of the downbeat F) Begnning of a new upbeat
MC 1: Hip extension – ankle
flexion
MC 2: Knee flexion
Reaction 1: Increase of the trunk and
legs angles of attack
Reaction 2: Increase of the thighs
angles of attack
MC 1: Hip flexion – Ankle extension
MC 2: Knee extension
Reaction 1: Decrease of the trunk and
the legs angles of attack
Reaction 2: Decrease of the thigh
angles of attack
MC 1: Hip extension – Ankle flexion
MC 2: Knee flexion
MC : Motor Command
And so on
Existing model versus those observations
Information found in previous studies or in books:
1- Their conclusions pointed out that the action of a single join can explain
the difference of performance between athletes
Hip, Knee, Ankle, … depending on the source
2- Their conclusions pointed out the existance of a top-down activation starting
from the shoulders or the hip and going to the ankles.
Important modifications in training the UUS
Motor coordination during the legs propulsion
Our Paradism
1- We tried to understand the cooperations existing between the joins and have
observed some very specific synergies
2- We have observed a motor control organised around a loop where all joins are
working at the same time

Can we improve the UUS of young athletes using those
informations ?
Training the UUS
Training program
Measurements done in 2012/2013 on young french national level swimmers
The program
3 sessions per week
20 à 30 min during each session (sometimes specific exercises, sometimes
« hidden » during the regular training)
3 axes (in and out the water) :
- Sensori-motor training
- Motor conditionning using Biofeedback protocoles (mostly video)
- Exercises stimulating the postural control and the dynamical
interactions between joins
8 weeks

Modifications Observations
Velocity (m.s-1) Improvement
Distance per cycle (m) Individual strategies
Frequency (cycle/s)
Adjustment or stabilisation
of the ratio F/AAmplitude (m)
Kinematical analysis
Thanks to which adaptions, swimmers were able to
swim faster under the water ?
Training the UUS

Modifications Observations
Angles of attack
HandImportant decrease
of the drag generated
by the superior parts
of the body
Fore-Arm
Arm
Trunk
Join angles
Wrist
No trendElbow
Shoulder
Uper limbs
We cannot associate the decrease of the angles of
attack to a specific join action…
Postural component
Training the UUS

Modifications Observations
Propulsion
efficiency(evaluted regarding of the angle
of attack and the velocity)
ThighImprovement or stabilisation
of the « propulsion
efficiency »
Leg
Foot
Join angles
Hip
No trendKnee
Ankle
Lower limbs
We cannot associate the modification to the
propulsion efficiency to a specific join action…
propulsive component
=
=
Training the UUS
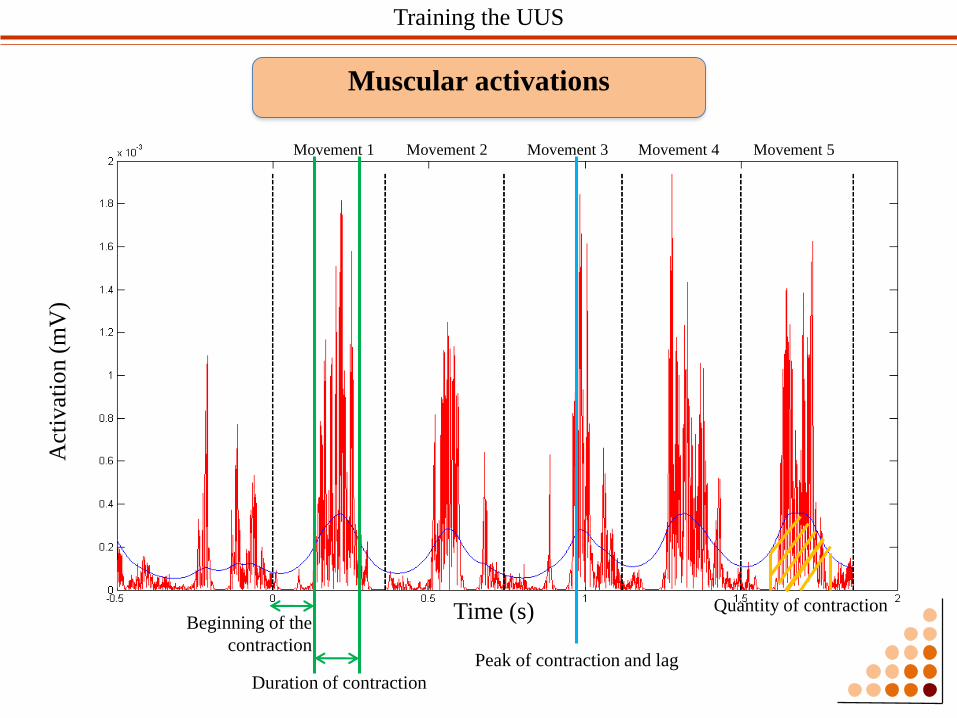
Time (s)
Act
ivat
ion (
mV
)
Movement 1 Movement 2 Movement 3 Movement 4 Movement 5
Beginning of the
contractionPeak of contraction and lag
Duration of contraction
Quantity of contraction
Training the UUS
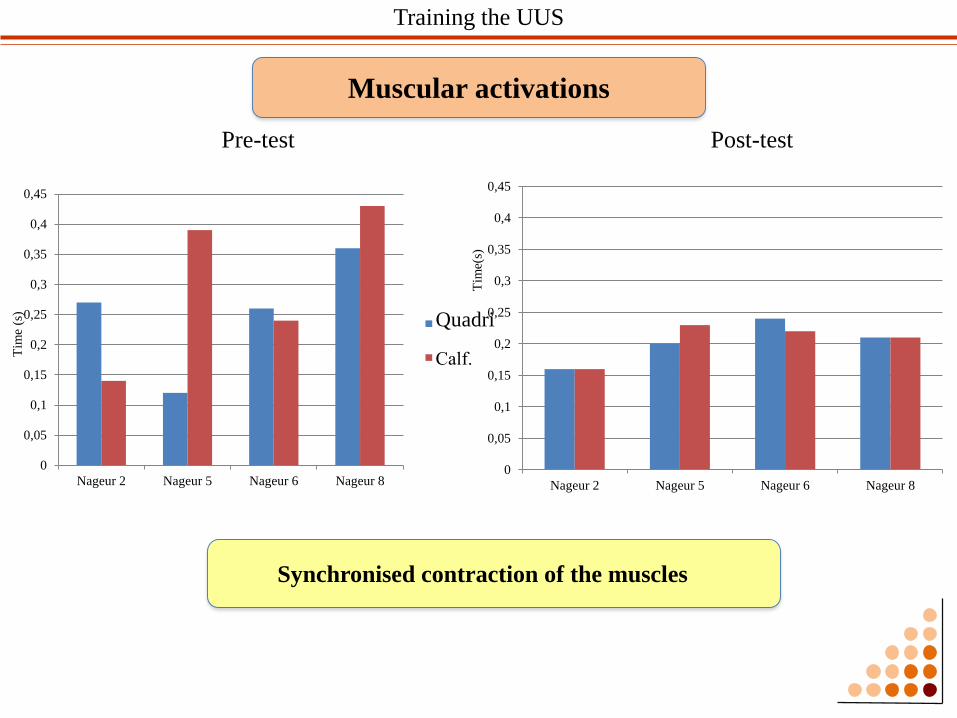
Muscular activations
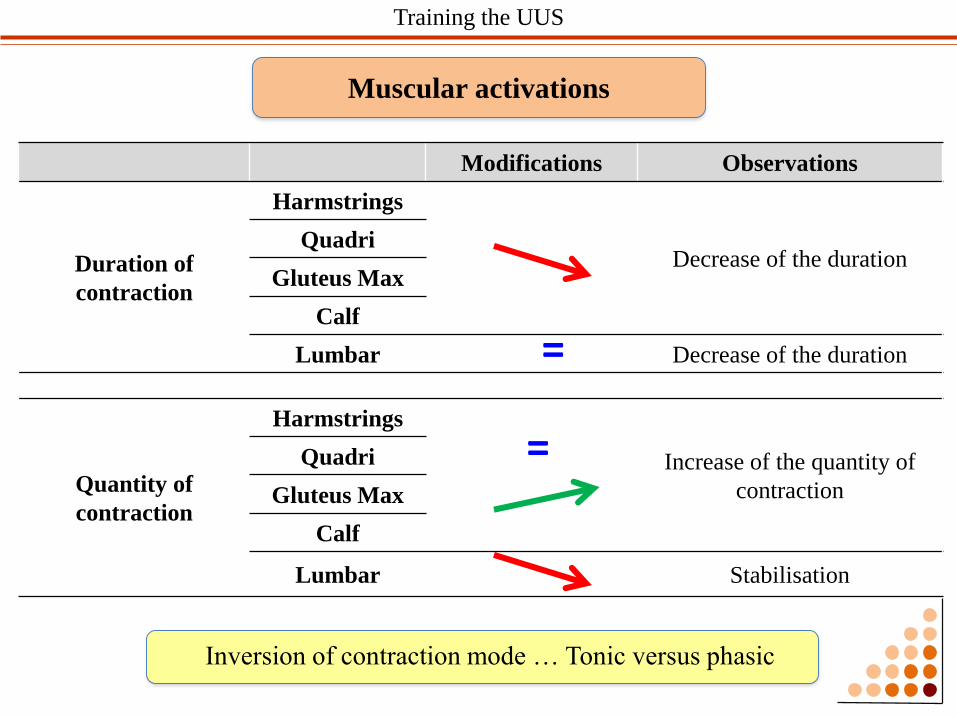
Modifications Observations
Duration of
contraction
Harmstrings
Decrease of the durationQuadri
Gluteus Max
Calf
Lumbar Decrease of the duration
Quantity of
contraction
Harmstrings
Increase of the quantity of
contraction
Quadri
Gluteus Max
Calf
Lumbar Stabilisation
=
Training the UUS
=
Inversion of contraction mode … Tonic versus phasic
Muscular activations
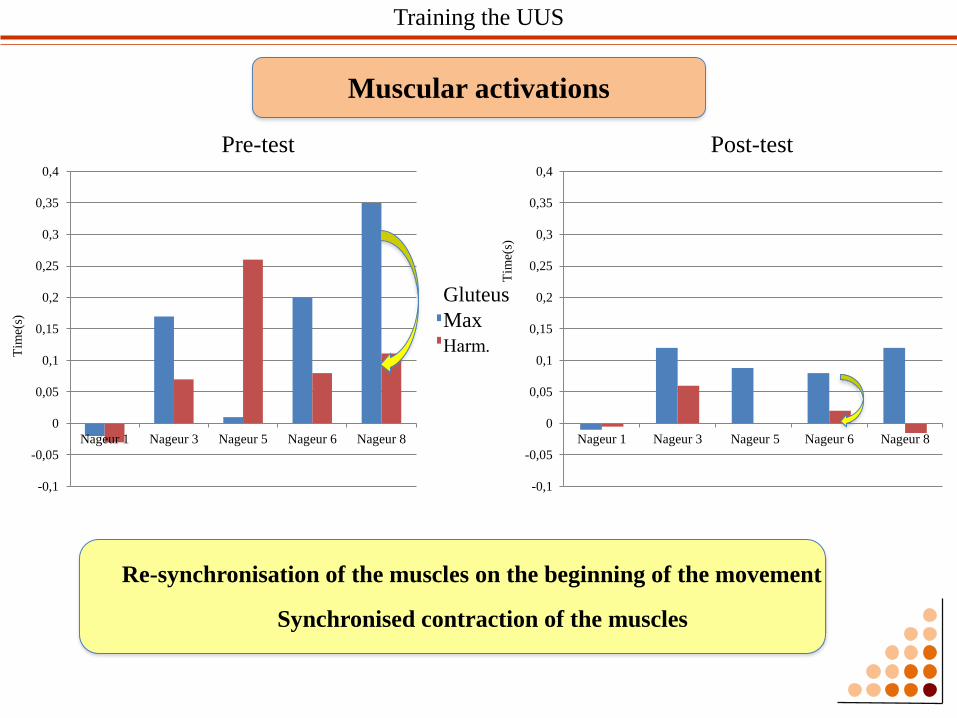
-0,1
-0,05
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
Nageur 1 Nageur 3 Nageur 5 Nageur 6 Nageur 8
Grand fessier
Quadriceps
-0,1
-0,05
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
Nageur 1 Nageur 3 Nageur 5 Nageur 6 Nageur 8
Tim
e(s)
Tim
e(s)
Pre-test Post-test
Re-synchronisation of the muscles on the beginning of the movement
Synchronised contraction of the muscles
Muscular activations
Gluteus
Max
Harm.
Training the UUS
Tim
e(s)
Tim
e (s
)
Pre-test Post-test
Synchronised contraction of the muscles
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
Nageur 2 Nageur 5 Nageur 6 Nageur 8
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
Nageur 2 Nageur 5 Nageur 6 Nageur 8
Ischio-
Jambiers
Mollet
Muscular activations
Quadri
Calf.
Training the UUS

What’s the result
1- Modification of the theoritical model
Newton action-reaction to votex mechanisms
Modifications
3- The start is a step by step process… take the time to glide…
2- Frequency over the amplitude
4- the motor control during the start involved a synergistic control of the
joins. No join should be seen a single element
Modification of the exercices and the vocabulary used with the coaches
5- Attention should be put on the type of muscle contraction and their
synchronisations
6- A short motor learning program can lead to real and strong improvements
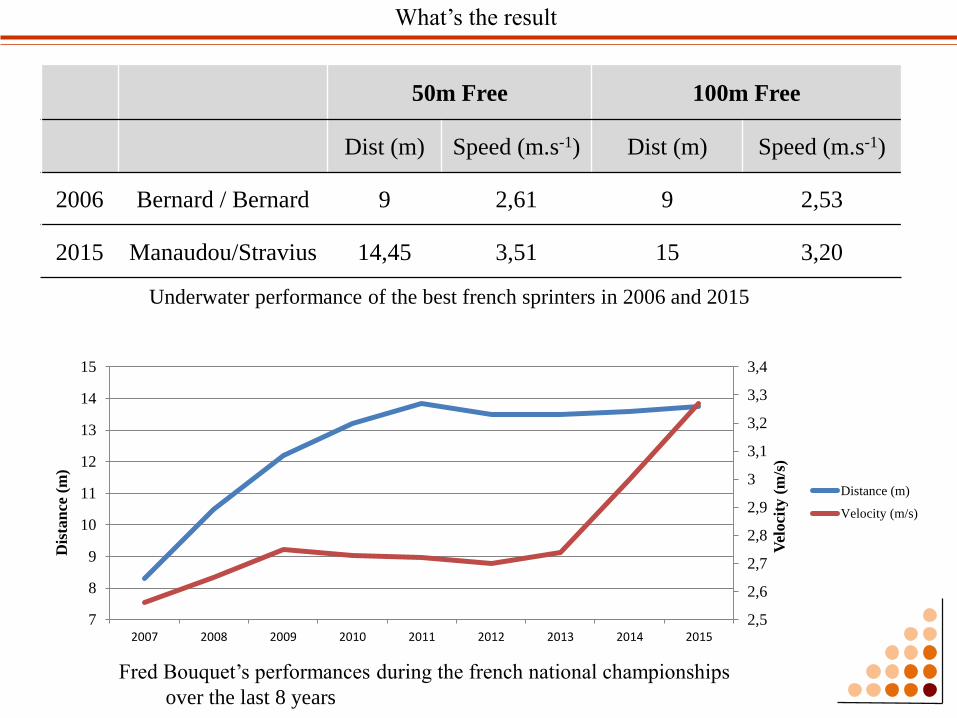
What’s the result
Fred Bouquet’s performances during the french national championships
over the last 8 years
50m Free 100m Free
Dist (m) Speed (m.s-1) Dist (m) Speed (m.s-1)
2006 Bernard / Bernard 9 2,61 9 2,53
2015 Manaudou/Stravius 14,45 3,51 15 3,20
2,5
2,6
2,7
2,8
2,9
3
3,1
3,2
3,3
3,4
7
8
9
10
11
12
13
14
15
2007 2008 2009 2010 2011 2012 2013 2014 2015
Vel
oci
ty (
m/s
)
Dis
tan
ce (
m)
Distance (m)
Velocity (m/s)
Underwater performance of the best french sprinters in 2006 and 2015
Thank you
Marc Elipot
French Swimming Federation – Research Department
University of Paris Descartes
French Institute of Sport (INSEP) – Performance Analysis Department
Philippe Hellard, Gilles Dietrich and Nicolas Houel