uncertainty quantification and visualization: geo-spatially registered terrains and mobile targets...
Post on 21-Dec-2015
222 views
TRANSCRIPT

Uncertainty Quantification and Visualization: Geo-Spatially Registered Terrains and Mobile Targets
Suresh LodhaComputer Science, University of California, Santa Cruz
• Common consistent representation of multiple views of geo-spatially registered terrains
• Low uncertainty compression algorithms preserving line features within terrains
• Visualization of uncertainty of GPS-tracked mobile targets
• Integration of mobile targets and terrains with geographic databases for decision-making

Accomplishments - I
• Development of GIS infrastructure for context-aware situational visualization
• Development of GPS infrastructure for mobile visualization
• Work on consistency and uncertainty issues in mobile situational (GIS-GPS) visualization

Accomplishments - II
• Modeling and quantifying uncertainty– Probability-based uncertainty (collaboration
with Pramod Varshney, Syracuse University)– Spatio-temporal GPS uncertainty – Low uncertainty line preserving compression
algorithms for terrains (extension from point preserving algorithms from previous year)
Accomplishments - III
• Integration of data and uncertainty within a global geospatial system (collaboration with Georgia Tech)
• Application to– Geospatial visualization– General Aviation
• Continuing work on– Multimodal interaction (speech)– Database querying – Wireless networks for communicating and visualizing data and information with associated uncertainty
– Probability-based uncertainty (collaboration with Pramod Varshney, Syracuse University)
– Spatio-temporal GPS uncertainty – Low uncertainty line preserving compression algorithms for terrains (extension
from point preserving algorithms from previous year)
GIS Infrastructure
• Aerial Imagery (DOQQs)
• Elevation Data– Digital Elevation Models (DEMs)– LIDAR Data
• Architectural Drawings
• Street Maps
• Schematic Diagrams

GIS Images: Aerial Imagery and LIDAR

GIS Images: DEM and AutoCAD
GPS Infrastructure
• Ashtech Z-12/G-12 Sensors– Standalone (1 meter) / Differential (1 cm)– Velocity (.1 knots)– L1/L2 frequency (ionospheric delay correction)– RTK/RTCM messages– 10 Hz update rate

GPS Receiver Equipment

Consistency and Uncertainty in Mobile Situational Visualization
• Disparate data sources
• Different data formats
• Different coordinate systems
• Different resolutions/ sampling/ sizes
• Different accuracy
• Different time stamps
• Communication time lags
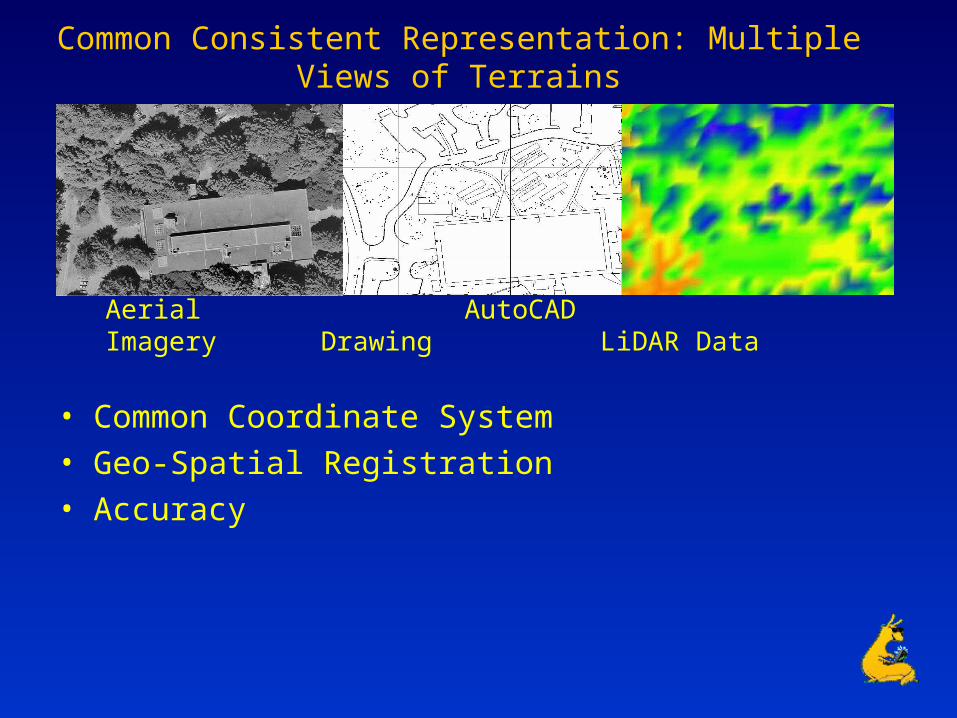
Common Consistent Representation: Multiple Views of Terrains
Aerial Imagery AutoCAD Drawing LiDAR Data
• Common Coordinate System
• Geo-Spatial Registration
• Accuracy
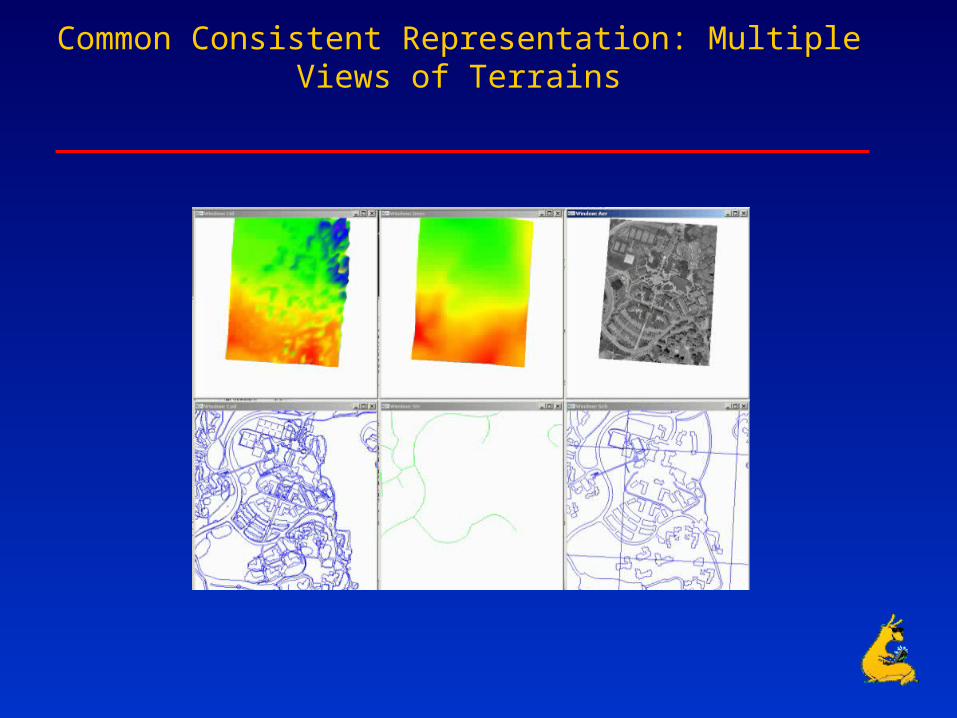
Common Consistent Representation: Multiple Views of Terrains

Modeling and Visualizing Uncertainty
• Probability-based uncertain particle movement
• GPS-based spatio-temporal uncertainty in particle movement
• Low uncertainty compression algorithms preserving line features within terrains
Algorithmic Computation
• Compute the probability of target at a point x after time t– Probability at an initial location (p)– Probability of movement along a direction (d)– Probability of speed (s)– Final probability = p * d * s

Computation of Probabilistic Locational Uncertainty
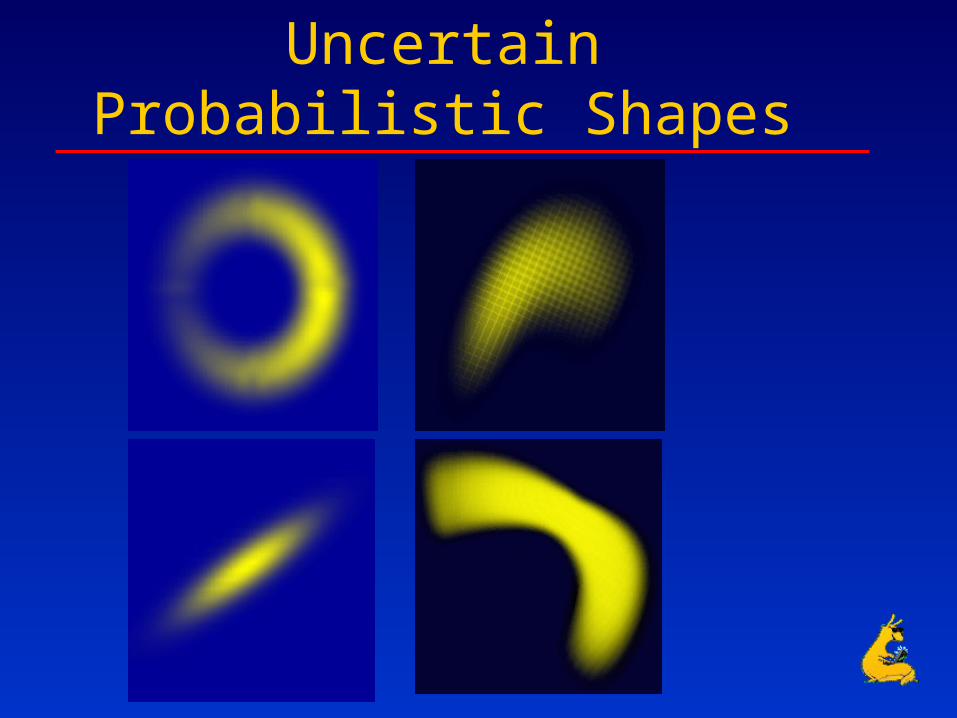
Uncertain Probabilistic Shapes

GPS Sources of Uncertainty
• Measurement Errors– Satellite clock drift, receiver clock drift,
satellite location error, atmospheric effects, multipath effect, selective availability
• GPS Availability Issues
• GPS Integrity Anomalies and Vulnerability

Parameters
• Mode– Standalone / Differential
• Environment– Urban / Foliage
• Movement– Stationary – Moving (Constant Velocity, Random)
Modeling: Static Data
• Number of accessible/used satellites– Urban higher than foliage– Standalone same as differential
• SNR (Signal to Noise Ratio) values– Urban higher than foliage– Standalone same as differential
• DOP (Dilution of Precision) values– Urban smaller than foliage– Standalone smaller than differential

Satellite Availability

Dilution of Precision
• Satellite Geometry and Orientation
Good satellite geometry Poor satellite geometry

SNR Modeling

Observations and Analysis: Constant Velocity Data

Visualization

Visualization
Terrain Uncertainty
• Point feature preserving compression algorithms (last year MURI)
• Line feature preserving compression algorithms– EMD (earth movers distance) concept extended
to line features– More efficient local algorithm– Line preservation (coastlines etc.)

Topology Degradation Metric
• EMD (Rubner et al. ‘98, Batra et al. ‘98, ’99, Lodha et al. 2000)– amount of work required to move one set of
lines to another (similarity)– Variables
• # features
• Location of features
• Feature Attributes– Length, Orientation
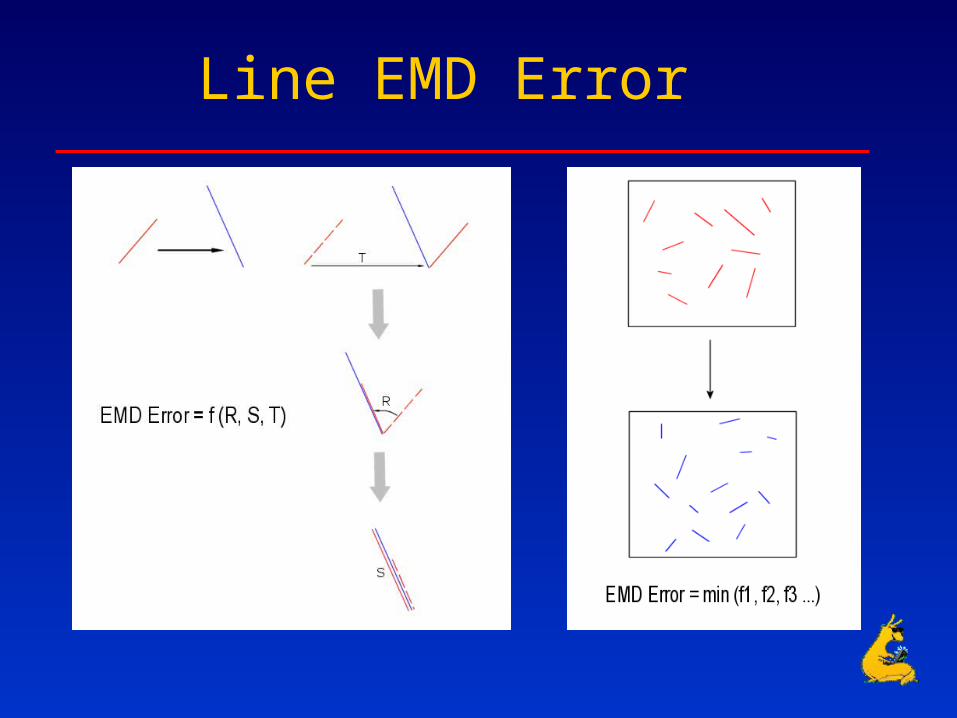
Line EMD Error
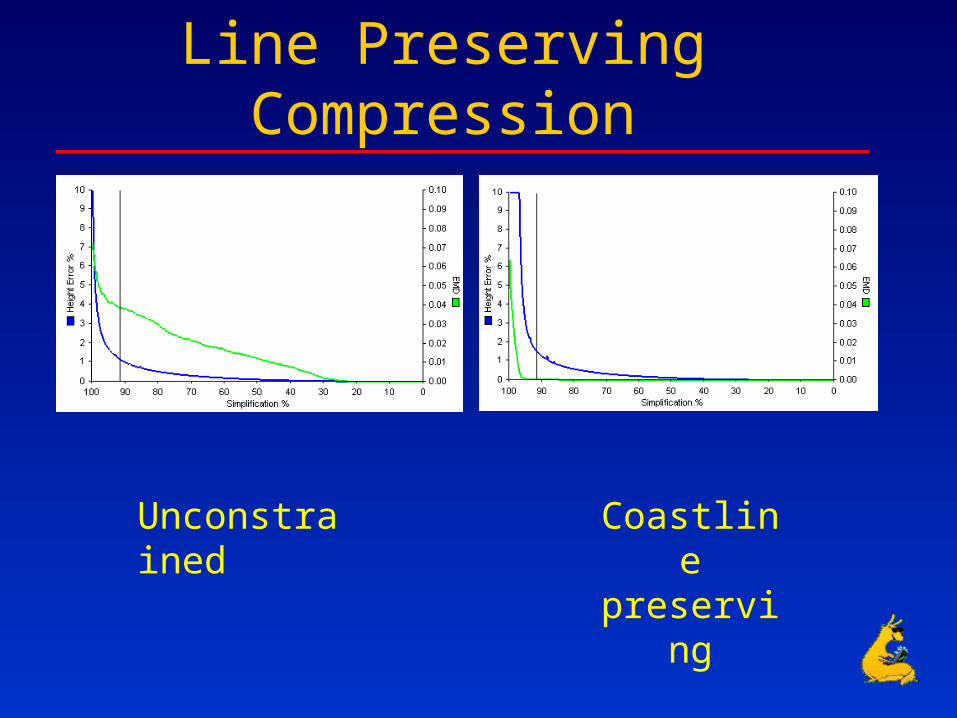
Line Preserving Compression
Unconstrained Coastline preserving
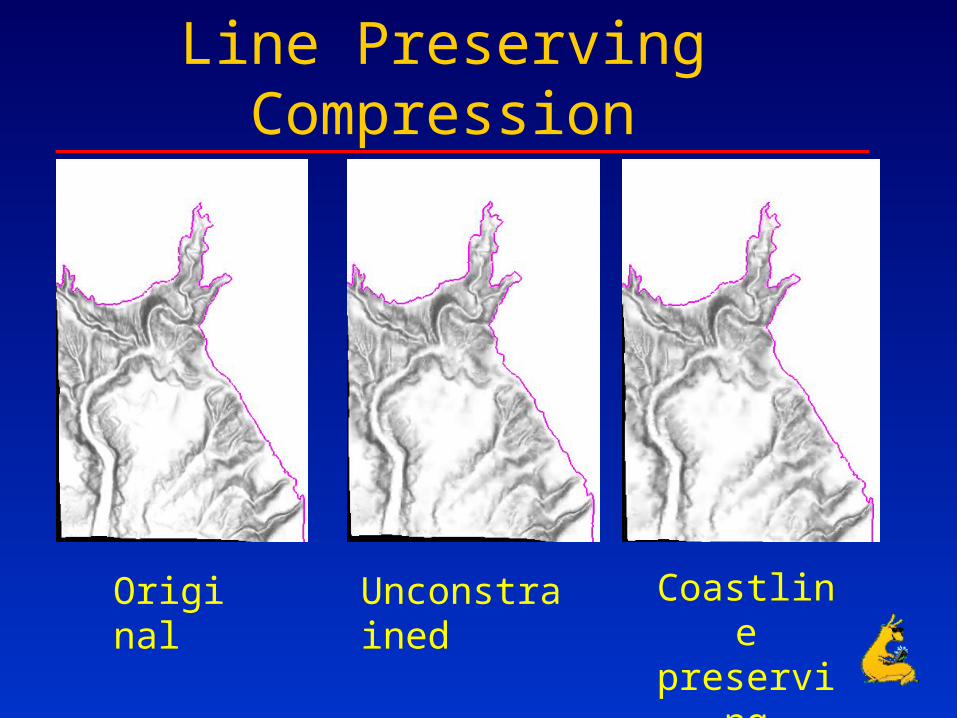
Line Preserving Compression
Original Unconstrained Coastline preserving

Hierarchical Line Simplification

Integration of Data and Uncertainty within VGIS
• Hierarchical zooming from the globe into the UCSC Campus (1/2 foot resolution imagery)
• Real-time visualization of GPS-tracked objects and associated uncertainty within VGIS

Hierarchical Zooming into UCSC Campus

Real-Time Mobile Uncertainty Visualization within VGIS

Uncertainty Quantification, Visualization and Communication: Continuing Work
• Heterogeneous Geo-Spatial Uncertainty
• Mobile Temporal Uncertainty
• Multi-Sensor Data Fusion (Images, LIDAR)
• Multi-modal Interaction (speech)
• Database Querying
• Wireless Networks

Collaborations - I
• Worked with Pramod Varshney on probabilistic uncertain particle movement (1 joint paper and 1 jointly supervised student); continuing to collaborate on uncertainty with mobility constraints
• Worked with Bill Ribarsky on integration of uncertainty within VGIS (1 joint paper and 1 jointly supervised student); continuing to collaborate on uncertainty in mobile situational visualization

Collaborations - II
• Worked with Ulrich Neumann on development of GPS infrastructure
• Worked with Avideh Zakhor on acquistion of LIDAR data
• continuing to collaborate on uncertainty in GPS, LIDAR and image data
Major Accomplishments
• Computation and visualization of uncertainty for terrains while preserving point and line features of terrains,
• Computation and visualization of uncertain mobile GPS-tracked targets embedded within a GIS Environment, and
• Embedding and visualization of uncertainty within the VGIS.