tutorial: labview mathscript
TRANSCRIPT

UniversityCollegeofSoutheastNorway
http://home.hit.no/~hansha
LabVIEWMathScriptHans-PetterHalvorsen,2016.10.31

ii
PrefaceThisdocumentexplainsthebasicconceptsofusingLabVIEWMathScript.
FormoreinformationaboutLabVIEW,visitmyBlog:http://home.hit.no/~hansha/
WhatisLabVIEW?
LabVIEW(shortforLaboratoryVirtualInstrumentationEngineeringWorkbench)isaplatformanddevelopmentenvironmentforavisualprogramminglanguagefromNationalInstruments.Thegraphicallanguageisnamed"G".
WhatisMATLAB?
MATLABisatoolfortechnicalcomputing,computationandvisualizationinanintegratedenvironment.MATLABisanabbreviationforMATrixLABoratory,soitiswellsuitedformatrixmanipulationandproblemsolvingrelatedtoLinearAlgebra.
MATLABofferslotsofadditionalToolboxesfordifferentareassuchasControlDesign,ImageProcessing,DigitalSignalProcessing,etc.
WhatisMathScript?
MathScriptisahigh-level,text-basedprogramminglanguage.MathScriptincludesmorethan800built-infunctionsandthesyntaxissimilartoMATLAB.Youmayalsocreatecustom-madem-filelikeyoudoinMATLAB.
MathScriptisanadd-onmoduletoLabVIEWbutyoudon’tneedtoknowLabVIEWprogramminginordertouseMathScript.IfyouwanttointegrateMathScriptfunctions(built-inorcustom-madem-files)aspartofaLabVIEWapplicationandcombinegraphicalandtextualprogramming,youcanworkwiththeMathScriptNode.
InadditiontotheMathScriptbuilt-infunctions,differentadd-onmodulesandtoolkitsinstallsadditionalfunctions.TheLabVIEWControlDesignandSimulationModuleandLabVIEWDigitalFilterDesignToolkitinstalllotsofadditionalfunctions.
YoucanmoreinformationaboutMathScripthere:http://www.ni.com/labview/mathscript.htm

HowdoyoustartusingMathScript?
YouneedtoinstallLabVIEWandtheLabVIEWMathScriptRTModule.Whennecessarysoftwareisinstalled,startMathScriptbyopenLabVIEW:
IntheGettingStartedwindow,selectTools->MathScriptWindow...:

iv
TableofContentsPreface......................................................................................................................................ii
TableofContents.....................................................................................................................iv
1 IntroductiontoLabVIEW...................................................................................................1
1.1 Dataflowprogramming...............................................................................................1
1.2 Graphicalprogramming..............................................................................................1
1.3 Benefits.......................................................................................................................2
1.4 LabVIEWMathScriptRTModule................................................................................2
2 LabVIEWMathScriptRTModule.......................................................................................4
3 LabVIEWMathScript.........................................................................................................5
3.1 Introduction................................................................................................................5
3.2 Help.............................................................................................................................7
3.3 Examples.....................................................................................................................7
3.4 Usefulcommands.....................................................................................................10
CallingfunctionsInMathScript...........................................................................................10
User-DefinedFunctionsInMathScript................................................................................11
Scripts..................................................................................................................................12
3.5 FlowControl.............................................................................................................14
3.5.1 If-elseStatement...............................................................................................14
3.5.2 SwitchandCaseStatement...............................................................................14
3.5.3 Forloop.............................................................................................................15
3.5.4 Whileloop.........................................................................................................15
3.6 Plotting.....................................................................................................................16

v TableofContents
Tutorial:LabVIEWMathScript
4 LinearAlgebraExamples.................................................................................................18
4.1 Vectors......................................................................................................................18
4.2 Matrices....................................................................................................................19
4.2.1 Transpose..........................................................................................................19
4.2.2 Diagonal.............................................................................................................20
4.2.3 Triangular..........................................................................................................21
4.2.4 MatrixMultiplication.........................................................................................21
4.2.5 MatrixAddition.................................................................................................22
4.2.6 Determinant......................................................................................................22
4.2.7 InverseMatrices................................................................................................23
4.3 Eigenvalues...............................................................................................................24
4.4 SolvingLinearEquations...........................................................................................25
4.5 LUfactorization.........................................................................................................26
4.6 TheSingularValueDecomposition(SVD).................................................................27
4.7 Commands................................................................................................................28
5 ControlDesignandSimulation........................................................................................29
5.1 State-spacemodelsandTransferfunctions.............................................................29
5.1.1 PID.....................................................................................................................30
5.1.2 State-spacemodel.............................................................................................31
5.1.3 Transferfunction...............................................................................................32
5.1.4 FirstOrderSystems...........................................................................................33
5.1.5 SecondOrderSystems.......................................................................................34
5.1.6 Padé-approximation..........................................................................................36
5.2 FrequencyResponseAnalysis...................................................................................37
5.2.1 BodeDiagram....................................................................................................38
TimeResponse....................................................................................................................41

vi TableofContents
Tutorial:LabVIEWMathScript
6 MathScriptNode.............................................................................................................43
6.1 TransferringMathScriptNodesbetweenComputers...............................................45
6.2 Examples...................................................................................................................45
6.3 Exercises...................................................................................................................49
7 MATLABScript.................................................................................................................50
AppendixA–MathScriptFunctionsforControlandSimulation............................................51

1
1 IntroductiontoLabVIEWLabVIEW(shortforLaboratoryVirtualInstrumentationEngineeringWorkbench)isaplatformanddevelopmentenvironmentforavisualprogramminglanguagefromNationalInstruments.Thegraphicallanguageisnamed"G".OriginallyreleasedfortheAppleMacintoshin1986,LabVIEWiscommonlyusedfordataacquisition,instrumentcontrol,andindustrialautomationonavarietyofplatformsincludingMicrosoftWindows,variousflavorsofUNIX,Linux,andMacOSX.ThelatestversionofLabVIEWisversionLabVIEW2009,releasedinAugust2009.VisitNationalInstrumentsatwww.ni.com.
Thecodefileshavetheextension“.vi”,whichisanabbreviationfor“VirtualInstrument”.LabVIEWofferslotsofadditionalAdd-OnsandToolkits.
1.1 DataflowprogrammingTheprogramminglanguageusedinLabVIEW,alsoreferredtoasG,isadataflowprogramminglanguage.Executionisdeterminedbythestructureofagraphicalblockdiagram(theLV-sourcecode)onwhichtheprogrammerconnectsdifferentfunction-nodesbydrawingwires.Thesewirespropagatevariablesandanynodecanexecuteassoonasallitsinputdatabecomeavailable.Sincethismightbethecaseformultiplenodessimultaneously,Gisinherentlycapableofparallelexecution.Multi-processingandmulti-threadinghardwareisautomaticallyexploitedbythebuilt-inscheduler,whichmultiplexesmultipleOSthreadsoverthenodesreadyforexecution.
1.2 GraphicalprogrammingLabVIEWtiesthecreationofuserinterfaces(calledfrontpanels)intothedevelopmentcycle.LabVIEWprograms/subroutinesarecalledvirtualinstruments(VIs).EachVIhasthreecomponents:ablockdiagram,afrontpanel,andaconnectorpanel.ThelastisusedtorepresenttheVIintheblockdiagramsofother,callingVIs.Controlsandindicatorsonthefrontpanelallowanoperatortoinputdataintoorextractdatafromarunningvirtualinstrument.However,thefrontpanelcanalsoserveasaprogrammaticinterface.Thusavirtualinstrumentcaneitherberunasaprogram,withthefrontpanelservingasauserinterface,or,whendroppedasanodeontotheblockdiagram,thefrontpaneldefinesthe

2 IntroductiontoLabVIEW
Tutorial:LabVIEWMathScript
inputsandoutputsforthegivennodethroughtheconnectorpane.ThisimplieseachVIcanbeeasilytestedbeforebeingembeddedasasubroutineintoalargerprogram.
Thegraphicalapproachalsoallowsnon-programmerstobuildprogramssimplybydragginganddroppingvirtualrepresentationsoflabequipmentwithwhichtheyarealreadyfamiliar.TheLabVIEWprogrammingenvironment,withtheincludedexamplesandthedocumentation,makesitsimpletocreatesmallapplications.Thisisabenefitononeside,butthereisalsoacertaindangerofunderestimatingtheexpertiseneededforgoodquality"G"programming.Forcomplexalgorithmsorlarge-scalecode,itisimportantthattheprogrammerpossessanextensiveknowledgeofthespecialLabVIEWsyntaxandthetopologyofitsmemorymanagement.ThemostadvancedLabVIEWdevelopmentsystemsofferthepossibilityofbuildingstand-aloneapplications.Furthermore,itispossibletocreatedistributedapplications,whichcommunicatebyaclient/serverscheme,andarethereforeeasiertoimplementduetotheinherentlyparallelnatureofG-code.
1.3 BenefitsOnebenefitofLabVIEWoverotherdevelopmentenvironmentsistheextensivesupportforaccessinginstrumentationhardware.Driversandabstractionlayersformanydifferenttypesofinstrumentsandbusesareincludedorareavailableforinclusion.Thesepresentthemselvesasgraphicalnodes.Theabstractionlayersofferstandardsoftwareinterfacestocommunicatewithhardwaredevices.Theprovideddriverinterfacessaveprogramdevelopmenttime.ThesalespitchofNationalInstrumentsis,therefore,thatevenpeoplewithlimitedcodingexperiencecanwriteprogramsanddeploytestsolutionsinareducedtimeframewhencomparedtomoreconventionalorcompetingsystems.Anewhardwaredrivertopology(DAQmxBase),whichconsistsmainlyofG-codedcomponentswithonlyafewregistercallsthroughNIMeasurementHardwareDDK(DriverDevelopmentKit)functions,providesplatformindependenthardwareaccesstonumerousdataacquisitionandinstrumentationdevices.TheDAQmxBasedriverisavailableforLabVIEWonWindows,MacOSXandLinuxplatforms.
FormoreinformationaboutLabVIEW,visitmyBlog:http://home.hit.no/~hansha/
1.4 LabVIEWMathScriptRTModuleTheLabVIEWMathScriptRTModuleisanadd-onmoduletoLabVIEW.WithLabVIEWMathScriptRTModuleyoucan:

3 IntroductiontoLabVIEW
Tutorial:LabVIEWMathScript
• Deployyourcustom.mfilestoNIreal-timehardware• ReusemanyofyourscriptscreatedwithTheMathWorks,Inc.MATLAB®softwareand
others• Developyour.mfileswithaninteractivecommand-lineinterface• EmbedyourscriptsintoyourLabVIEWapplicationsusingtheMathScriptNode

4
2 LabVIEWMathScriptRTModule
YoucanworkwithLabVIEWMathScriptthrougheitheroftwointerfaces:the“LabVIEWMathScriptInteractiveWindow”orthe“MathScriptNode”.
YoucanworkwithLabVIEWMathScriptRTModulethroughbothinteractiveandprogrammaticinterfaces.Foraninteractiveinterfaceinwhichyoucanload,save,design,andexecuteyour.mfilescripts,youcanworkwiththe“MathScriptInteractiveWindow”.Todeployyour.mfilescriptsaspartofaLabVIEWapplicationandcombinegraphicalandtextualprogramming,youcanworkwiththe“MathScriptNode”.
TheLabVIEWMathScriptRTModulecomplementstraditionalLabVIEWgraphicalprogrammingforsuchtasksasalgorithmdevelopment,signalprocessing,andanalysis.TheLabVIEWMathScriptRTModulespeedsuptheseandothertasksbygivingusersasingleenvironmentinwhichtheycanchoosethemosteffectivesyntax,whethertextual,graphical,oracombinationofthetwo.Inaddition,youcanexploitthebestofLabVIEWandthousandsofpubliclyavailable.mfilescriptsfromtheweb,textbooks,oryourownexistingm-scriptapplications.LabVIEWMathScriptRTModuleisabletoprocessyourfilescreatedusingthecurrentMathScriptsyntaxand,forbackwardscompatibility,filescreatedusinglegacyMathScriptsyntaxes.LabVIEWMathScriptRTModulecanalsoprocesscertainofyourfilesutilizingothertext-basedsyntaxes,suchasfilesyoucreatedusingMATLABsoftware.BecausetheMathScriptRTengineisusedtoprocessscriptscontainedinaMathScriptWindowsorMathScriptNode,andbecausetheMathScriptRTenginedoesnotsupportallsyntaxes,notallexistingtext-basedscriptsaresupported.
LabVIEWMathScriptRTModulesupportsmostofthefunctionalityavailableinMATLAB,thesyntaxisalsosimilar.
Formoredetails,seehttp://zone.ni.com/devzone/cda/tut/p/id/3257

5
3 LabVIEWMathScript
3.1 IntroductionRequires:MathScriptRTModule
HowdoyoustartusingMathScript?YouneedtoinstallLabVIEWandtheLabVIEWMathScriptRTModule.Whennecessarysoftwareisinstalled,startMathScriptbyopenLabVIEW:
IntheGettingStartedwindow,selectTools->MathScriptWindow...:

6 LabVIEWMathScript
Tutorial:LabVIEWMathScript
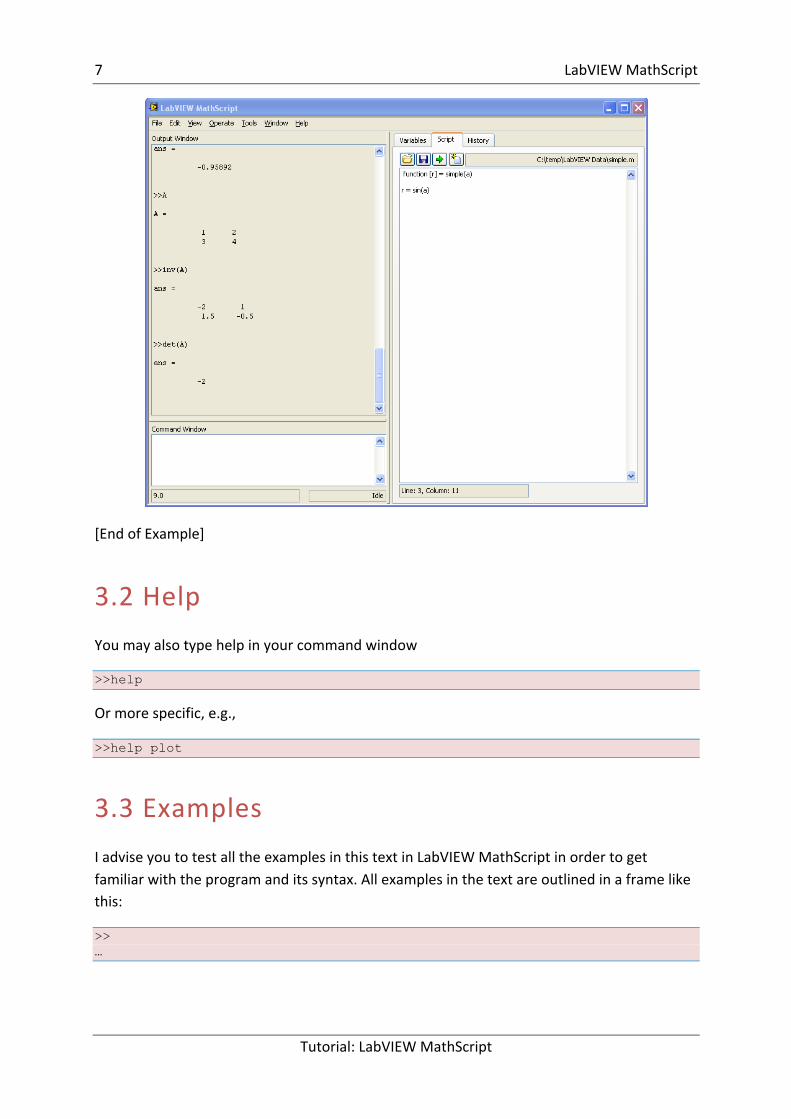
The“LabVIEWMathScriptWindow”isaninteractiveinterfaceinwhichyoucanenter.mfilescriptcommandsandseeimmediateresults,variablesandcommandshistory.Thewindowincludesacommand-lineinterfacewhereyoucanentercommandsone-by-oneforquickcalculations,scriptdebuggingorlearning.Alternatively,youcanenterandexecutegroupsofcommandsthroughascripteditorwindow.
Asyouwork,avariabledisplayupdatestoshowthegraphical/textualresultsandahistorywindowtracksyourcommands.Thehistoryviewfacilitatesalgorithmdevelopmentbyallowingyoutousetheclipboardtoreuseyourpreviouslyexecutedcommands.
Youcanusethe“LabVIEWMathScriptWindow”toentercommandsoneattime.Youalsocanenterbatchscriptsinasimpletexteditorwindow,loadedfromatextfile,orimportedfromaseparatetexteditor.The“LabVIEWMathScriptWindow”providesimmediatefeedbackinavarietyofforms,suchasgraphsandtext.
Example:
7 LabVIEWMathScript
Tutorial:LabVIEWMathScript
[EndofExample]
3.2 HelpYoumayalsotypehelpinyourcommandwindow
>>help
Ormorespecific,e.g.,
>>help plot
3.3 ExamplesIadviseyoutotestalltheexamplesinthistextinLabVIEWMathScriptinordertogetfamiliarwiththeprogramanditssyntax.Allexamplesinthetextareoutlinedinaframelikethis:
>> …

8 LabVIEWMathScript
Tutorial:LabVIEWMathScript
ThisiscommandsyoushouldwriteintheCommandWindow.
YoutypeallyourcommandsintheCommandWindow.Iwillusethesymbol“>>”toillustratethatthecommandsshouldbewrittenintheCommandWindow.
Example:Matrices
Definingthefollowingmatrix
𝐴 = 1 20 3
Thesyntaxisasfollows:
>> A = [1 2;0 3]
Or
>> A = [1,2;0,3]
Ifyou,foranexample,wanttofindtheanswerto
𝑎 + 𝑏,𝑤ℎ𝑒𝑟𝑒𝑎 = 4, 𝑏 = 3
>>a=4 >>b=3 >>a+b
MathScriptthenresponds:
ans = 7
MathScriptprovidesasimplewaytodefinesimplearraysusingthesyntax:“init:increment:terminator”.Forinstance:
>> array = 1:2:9 array = 1 3 5 7 9
Thecodedefinesavariablenamedarray(orassignsanewvaluetoanexistingvariablewiththenamearray)whichisanarrayconsistingofthevalues1,3,5,7,and9.Thatis,thearraystartsat1(theinitvalue),incrementswitheachstepfromthepreviousvalueby2(theincrementvalue),andstopsonceitreaches(ortoavoidexceeding)9(theterminatorvalue).
Theincrementvaluecanactuallybeleftoutofthissyntax(alongwithoneofthecolons),touseadefaultvalueof1.
>> ari = 1:5

9 LabVIEWMathScript
Tutorial:LabVIEWMathScript
ari = 1 2 3 4 5
Thecodeassignstothevariablenamedarianarraywiththevalues1,2,3,4,and5,sincethedefaultvalueof1isusedastheincrementer.
Notethattheindexingisone-based,whichistheusualconventionformatricesinmathematics.Thisisatypicalforprogramminglanguages,whosearraysmoreoftenstartwithzero.
Matricescanbedefinedbyseparatingtheelementsofarowwithblankspaceorcommaandusingasemicolontoterminateeachrow.Thelistofelementsshouldbesurroundedbysquarebrackets:[].Parentheses:()areusedtoaccesselementsandsubarrays(theyarealsousedtodenoteafunctionargumentlist).
>> A = [16 3 2 13; 5 10 11 8; 9 6 7 12; 4 15 14 1] A = 16 3 2 13 5 10 11 8 9 6 7 12 4 15 14 1 >> A(2,3) ans = 11
Setsofindicescanbespecifiedbyexpressionssuchas"2:4",whichevaluatesto[2,3,4].Forexample,asubmatrixtakenfromrows2through4andcolumns3through4canbewrittenas:
>> A(2:4,3:4) ans = 11 8 7 12 14 1
Asquareidentitymatrixofsizencanbegeneratedusingthefunctioneye,andmatricesofanysizewithzerosoronescanbegeneratedwiththefunctionszerosandones,respectively.
>> eye(3) ans = 1 0 0 0 1 0 0 0 1 >> zeros(2,3) ans = 0 0 0 0 0 0 >> ones(2,3) ans =

10 LabVIEWMathScript
Tutorial:LabVIEWMathScript
1 1 1 1 1 1
3.4 UsefulcommandsHerearesomeusefulcommands:
Command Description
eye(x), eye(x,y) Identitymatrixoforderx
ones(x), ones(x,y) Amatrixwithonlyones
zeros(x), zeros(x,y) Amatrixwithonlyzeros
diag([x y z]) Diagonalmatrix
size(A) DimensionofmatrixA
A’ InverseofmatrixA
CallingfunctionsInMathScriptMathScriptincludesmorethan800built-infunctionsthatyoucanuse,e.g.,inaprevioustaskyouusedtheplotfunction.
Example:Built-inFunctions
Giventhevector:
>>x=[1 2 5 6 8 9 3]
→Findthemeanvalueofthevectorx.
→Findtheminimumvalueofthevectorx.
→Findthemaximumvalueofthevectorx.
TheMathScriptCodeis:
x=[1 2 5 6 8 9 3] mean(x)

11 LabVIEWMathScript
Tutorial:LabVIEWMathScript
min(x) max(x)
[EndofExample]
User-DefinedFunctionsInMathScriptMathScriptincludesmorethan800built-infunctionsthatyoucanusebutsometimesyouneedtocreateyourownfunctions.
TodefineyourownfunctioninMathScript,usethefollowingsyntax:
function outputs = function_name(inputs) % documentation …
Hereistheprocedureforcreatingaauser-definedfunctioninMathScript:

12 LabVIEWMathScript
Tutorial:LabVIEWMathScript
ScriptsAscriptisasequenceofMathScriptcommandsthatyouwanttoperformtoaccomplishatask.Whenyouhavecreatedthescriptyoumaysaveitasam-fileforlateruse.
YoumayalsohavemultipleScriptWindowsopenatthesametimebyselecting“NewScriptEditor”intheFilemenu:

13 LabVIEWMathScript
Tutorial:LabVIEWMathScript
Thisgives:

14 LabVIEWMathScript
Tutorial:LabVIEWMathScript
3.5 FlowControlThischapterexplainsthebasicconceptsofflowcontrolinMathScript.
Thetopicsareasfollows:
• If-elsestatement• Switchandcasestatement• Forloop• Whileloop
3.5.1 If-elseStatement
Theifstatementevaluatesalogicalexpressionandexecutesagroupofstatementswhentheexpressionistrue.Theoptionalelseifandelsekeywordsprovidefortheexecutionofalternategroupsofstatements.Anendkeyword,whichmatchestheif,terminatesthelastgroupofstatements.Thegroupsofstatementsaredelineatedbythefourkeywords—nobracesorbracketsareinvolved.
Example:If-ElseStatement
Testthefollowingcode:
n=5 if n > 2 M = eye(n) elseif n < 2 M = zeros(n) else M = ones(n) end
[EndofExample]
3.5.2 SwitchandCaseStatement
Theswitchstatementexecutesgroupsofstatementsbasedonthevalueofavariableorexpression.Thekeywordscaseandotherwisedelineatethegroups.Onlythefirstmatchingcaseisexecuted.Theremustalwaysbeanendtomatchtheswitch.
Example:SwitchandCaseStatement
Testthefollowingcode:
n=2 switch(n)

15 LabVIEWMathScript
Tutorial:LabVIEWMathScript
case 1 M = eye(n) case 2 M = zeros(n) case 3 M = ones(n) end
[EndofExample]
3.5.3 Forloop
Theforlooprepeatsagroupofstatementsafixed,predeterminednumberoftimes.Amatchingenddelineatesthestatements.
Example:ForLoop
Testthefollowingcode:
m=5 for n = 1:m r(n) = rank(magic(n)); end r
[EndofExample]
3.5.4 Whileloop
Thewhilelooprepeatsagroupofstatementsanindefinitenumberoftimesundercontrolofalogicalcondition.Amatchingenddelineatesthestatements.
Example:WhileLoop
Testthefollowingcode:
m=5; while m > 1 m = m - 1; zeros(m) end
[EndofExample]

16 LabVIEWMathScript
Tutorial:LabVIEWMathScript
3.6 PlottingThischapterexplainsthebasicconceptsofcreatingplotsinMathScript.
Topics:
• BasicPlotcommands
Example:Plotting
Functionplotcanbeusedtoproduceagraphfromtwovectorsxandy.Thecode:
x = 0:pi/100:2*pi; y = sin(x); plot(x,y)
producesthefollowingfigureofthesinefunction:
[EndofExample]
Example:Plotting
Three-dimensionalgraphicscanbeproducedusingthefunctionssurf,plot3ormesh.
[X,Y] = meshgrid(-10:0.25:10,-10:0.25:10); f = sinc(sqrt((X/pi).^2+(Y/pi).^2)); mesh(X,Y,f); axis([-10 10 -10 10 -0.3 1]) xlabel('{\bfx}')

17 LabVIEWMathScript
Tutorial:LabVIEWMathScript
ylabel('{\bfy}') zlabel('{\bfsinc} ({\bfR})') hidden off
Thiscodeproducesthefollowing3Dplot:
[EndofExample]

18
4 LinearAlgebraExamplesRequires:MathScriptRTModule
Linearalgebraisabranchofmathematicsconcernedwiththestudyofmatrices,vectors,vectorspaces(alsocalledlinearspaces),linearmaps(alsocalledlineartransformations),andsystemsoflinearequations.
MathScriptarewellsuitedforLinearAlgebra.
4.1 VectorsGivenavectorx
𝑥 =
𝑥2𝑥3⋮𝑥5
∈ 𝑅5
Example:Vectors
Giventhefollowingvector
𝑥 =123
>> x=[1; 2; 3] x = 1 2 3
TheTransposeofvectorx:
𝑥8 = 𝑥2 𝑥3 ⋯ 𝑥5 ∈ 𝑅2:5
>> x' ans = 1 2 3
[EndofExample]
19 LinearAlgebraExamples
Tutorial:LabVIEWMathScript
TheLengthofvectorx:
𝑥 = 𝑥8𝑥 = 𝑥23 + 𝑥33 + ⋯+ 𝑥53
Orthogonality:
𝑥8𝑦 = 0
4.2 MatricesGivenamatrixA:
𝐴 =𝑎22 ⋯ 𝑎2<⋮ ⋱ ⋮𝑎52 ⋯ 𝑎5<
∈ 𝑅5:<
Example:Matrices
Giventhefollowingmatrix:
𝐴 = 0 1−2 −3
>> A=[0 1;-2 -3] A = 0 1 -2 -3
[EndofExample]
4.2.1 Transpose
TheTransposeofmatrixA:
𝐴8 =𝑎22 ⋯ 𝑎52⋮ ⋱ ⋮
𝑎2< ⋯ 𝑎5<∈ 𝑅<:5
Example:Transpose
Giventhematrix:
𝐴8 = 0 1−2 −3
8= 0 −2
1 −3

20 LinearAlgebraExamples
Tutorial:LabVIEWMathScript
>> A' ans = 0 -2 1 -3
[EndofExample]
4.2.2 Diagonal
TheDiagonalelementsofmatrixAisthevector
𝑑𝑖𝑎𝑔(𝐴) =
𝑎22𝑎33⋮𝑎DD
∈ 𝑅DEFGH(:,<)
Example:Diagonal
FindthediagonalelementsofmatrixA:
>> diag(A) ans = 0 -3
[EndofExample]
TheDiagonalmatrixΛisgivenby:
Λ =
𝜆2 0 ⋯ 00 𝜆3 ⋯ 0⋮ ⋮ ⋱ ⋮0 0 ⋯ 𝜆5
∈ 𝑅5:5
GiventheIdentitymatrixI:
𝐼 =
1 0 ⋯ 00 1 ⋯ 0⋮ ⋮ ⋱ ⋮0 0 ⋯ 1
∈ 𝑅5:<
Example:IdentityMatrix
Getthe3x3Identitymatrix:
>> eye(3) ans = 1 0 0

21 LinearAlgebraExamples
Tutorial:LabVIEWMathScript
0 1 0 0 0 1
[EndofExample]
4.2.3 Triangular
LowerTriangularmatrixL:
𝐿 =. 0 0⋮ ⋱ 0. ⋯ .
UpperTriangularmatrixU:
𝑈 =. ⋯ .0 ⋱ ⋮0 0 .
4.2.4 MatrixMultiplication
Giventhematrices 𝐴 ∈ 𝑅5:< and 𝐵 ∈ 𝑅<:D,then
𝐶 = 𝐴𝐵 ∈ 𝑅5:D
where
𝑐RS = 𝑎RT𝑏TS
5
TE2
Example:MatrixMultiplication
Matrixmultiplication:
>> A=[0 1;-2 -3] A = 0 1 -2 -3 >> B=[1 0;3 -2] B = 1 0 3 -2 >> A*B ans = 3 -2 -11 6
[EndofExample]

22 LinearAlgebraExamples
Tutorial:LabVIEWMathScript
Note!
𝐴𝐵 ≠ 𝐵𝐴
𝐴 𝐵𝐶 = 𝐴𝐵 𝐶
𝐴 + 𝐵 𝐶 = 𝐴𝐶 + 𝐵𝐶
𝐶 𝐴 + 𝐵 = 𝐶𝐴 + 𝐶𝐵
4.2.5 MatrixAddition
Giventhematrices 𝐴 ∈ 𝑅5:< and 𝐵 ∈ 𝑅5:<,then
𝐶 = 𝐴 + 𝐵 ∈ 𝑅5:<
Example:MatrixAddition
Matrixaddition:
>> A=[0 1;-2 -3] >> B=[1 0;3 -2] >> A+B ans = 1 1 1 -5
[EndofExample]
4.2.6 Determinant
Givenamatrix 𝐴 ∈ 𝑅5:5,thentheDeterminantisgiven:
det 𝐴 = 𝐴
Givena2x2matrix
𝐴 =𝑎22 𝑎23𝑎32 𝑎33 ∈ 𝑅3:3
Then
det 𝐴 = 𝐴 = 𝑎22𝑎33 − 𝑎32𝑎23

23 LinearAlgebraExamples
Tutorial:LabVIEWMathScript
Example:Determinant
Findthedeterminant:
A = 0 1 -2 -3 >> det(A) ans = 2
Noticethat
det 𝐴𝐵 = det 𝐴 det 𝐵
and
det 𝐴8 = det(𝐴)
[EndofExample]
Example:Determinant
Determinants:
>> det(A*B) ans = -4 >> det(A)*det(B) ans = -4 >> det(A') ans = 2 >> det(A) ans = 2
[EndofExample]
4.2.7 InverseMatrices
Theinverseofaquadraticmatrix 𝐴 ∈ 𝑅5:5 isdefinedby:
𝐴Y2
if

24 LinearAlgebraExamples
Tutorial:LabVIEWMathScript
𝐴𝐴Y2 = 𝐴Y2𝐴 = 𝐼
Fora2x2matrixwehave:
𝐴 =𝑎22 𝑎23𝑎32 𝑎33 ∈ 𝑅3:3
Theinverse 𝐴Y2 isgivenby
𝐴Y2 =1
det(𝐴)𝑎33 −𝑎23−𝑎32 𝑎22 ∈ 𝑅3:3
Example:InverseMatrices
Inversematrix:
A = 0 1 -2 -3 >> inv(A) ans = -1.5000 -0.5000 1.0000 0
[EndofExample]
Noticethat:
𝐴𝐴Y2 = 𝐴Y2𝐴 = 𝐼
→ProvethisinMathScript
4.3 EigenvaluesGiven 𝐴 ∈ 𝑅5:5,thentheEigenvaluesisdefinedas:
det 𝜆𝐼 − 𝐴 = 0
Example:Eigenvalues
FindtheEigenvalues:
A = 0 1 -2 -3 >> eig(A) ans = -1 -2

25 LinearAlgebraExamples
Tutorial:LabVIEWMathScript
[EndofExample]
4.4 SolvingLinearEquationsGiventhelinearequation
𝐴𝑥 = 𝑏
withthesolution:
𝑥 = 𝐴Y2𝑏
(AssumingthattheinverseofAexists)
Example:SolvingLinearEquations
Solvingthefollowingequation:
Theequations
𝑥2 + 2𝑥3 = 53𝑥2 + 4𝑥3 = 6
maybewritten
𝐴𝑥 = 𝑏
1 23 4
𝑥2𝑥3 = 5
6
where
𝐴 = 1 23 4
𝑥 =𝑥2𝑥3
𝑏 = 56
Thesolutionis:
A = 1 2 3 4 >> b=[5;6] b = 5 6 >> x=inv(A)*b

26 LinearAlgebraExamples
Tutorial:LabVIEWMathScript
x = -4.0000 4.5000
InMathScriptyoucouldalsowrite“x=A\b”,whichshouldgivethesameanswer.ThissyntaxcanalsobeusedwhentheinverseofAdon’texists.
[EndofExample]
Example:SolvingLinearEquations
Illegaloperation:
>> A=[1 2;3 4;7 8] >> x=inv(A)*b ??? Error using ==> inv Matrix must be square. >> x=A\b x = -3.5000 4.1786
[EndofExample]
4.5 LUfactorizationLUfactorizationof 𝐴 ∈ 𝑅5:< isgivenby
𝐴 = 𝐿𝑈
where
Lisalowertriangularmatrix
Uisauppertriangularmatrix
TheMathScriptsyntaxis[L,U]=lu(A)
Example:LUFactorization
FindLandU:
>> A=[1 2;3 4] >> [L,U]=lu(A) L = 0.3333 1.0000 1.0000 0 U = 3.0000 4.0000

27 LinearAlgebraExamples
Tutorial:LabVIEWMathScript
0 0.6667
[EndofExample]
OrsometimesLUfactorizationof 𝐴 ∈ 𝑅5:< isgivenby
𝐴 = 𝐿𝑈 = 𝐿𝐷𝑈
where
Disadiagonalmatrix
TheMathScriptsyntaxis[L,U,P]=lu(A)
Example:LUFactorization
FindL,UandP:
>> A=[1 2;3 4] A = 1 2 3 4 >> [L,U,P]=lu(A) L = 1.0000 0 0.3333 1.0000 U = 3.0000 4.0000 0 0.6667 P = 0 1 1 0
[EndofExample]
4.6 TheSingularValueDecomposition(SVD)TheSingularvalueDecomposition(SVD)ofthematrix 𝐴 ∈ 𝑅5:< isgivenby
𝐴 = 𝑈𝑆𝑉8
where
Uisaorthogonalmatrix
Visaorthogonalmatrix
Sisadiagonalsingularmatrix

28 LinearAlgebraExamples
Tutorial:LabVIEWMathScript
Example:SVDDecomposition
FindS,VandD:
>> A=[1 2;3 4]; >> [U,S,V] = svd(A) U = -0.4046 -0.9145 -0.9145 0.4046 S = 5.4650 0 0 0.3660 V = -0.5760 0.8174 -0.8174 -0.5760
[EndofExample]
4.7 Commands
Command Description
[L,U]=lu(A)
[L,U,P]=lu(A)LUFactorization
[U,S,V] = svd(A) SingularValueDecomposition(SVD)

29
5 ControlDesignandSimulation
UsingLabVIEWMathScriptforControlDesignpurposesyouneedtoinstallthe“ControlDesignandSimulationModule”inadditiontothe“MathScriptRTModule”itself.
UsetheControlDesignMathScriptRTModulefunctionstodesign,analyze,andsimulatelinearcontrollermodelsusingatext-basedlanguage.ThefollowingisalistofControlDesignMathScriptRTModuleclassesoffunctionsandcommandsthatLabVIEWMathScriptsupports.
GettinghelpaboutMathScriptfunctionsregardingtheControlDesignToolkit(CDT),type“helpcdt”intheCommandWindowintheMathScriptenvironment.
Thefollowingfunctionclassesexist:
Wewillgothroughsomeoftheclassesandfunctionindetailbelow:
5.1 State-spacemodelsandTransferfunctionsMathScriptofferslotsoffunctionsfordefiningandmanipulatestate-spacemodelsandtransferfunctions.

30 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
Class:contruct
Description:
Usefunctionsintheconstructclasstoconstructlineartime-invariantsystemmodelsandtoconvertbetweenmodelforms.
Belowweseethedifferentfunctionsavailableintheconstructclass:
Belowwewillgivesomeexamplesofhowtousethemostimportfunctionsinthisclass.
5.1.1 PID
Currently,theProportional-Integral-Derivative(PID)algorithmisthemostcommoncontrolalgorithmusedinindustry.
InPIDcontrol,youmustspecifyaprocessvariableandasetpoint.Theprocessvariableisthesystemparameteryouwanttocontrol,suchastemperature,pressure,orflowrate,andthesetpointisthedesiredvaluefortheparameteryouarecontrolling.
APIDcontrollerdeterminesacontrolleroutputvalue,suchastheheaterpowerorvalveposition.Thecontrollerappliesthecontrolleroutputvaluetothesystem,whichinturndrivestheprocessvariabletowardtheset-pointvalue.
ThenthePIDcontrollercalculatesthecontrolleraction,u(t):
𝑢(𝑡) = 𝐾b 𝑒 +1𝑇d
𝑒𝑑𝑡 + 𝑇e𝑑𝑒𝑑𝑡
f
g
Where
𝐾b Controllergain
𝑇d Integraltime

31 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
𝑇e Derivativetime
And 𝑒 istheerror
𝑒 = 𝑆𝑃 − 𝑃𝑉
SP–Setpoint
PV–ProcessVariable
Function:pid
Description:
Constructsaproportional-integral-derivative(PID)controllermodelineitherparallel,series,oracademicform.
Examples:
Kc = 0.5; Ti = 0.25; SysOutTF = pid(Kc, Ti, 'academic');
[EndofExample]
5.1.2 State-spacemodel
Astate-spacemodelisjustastructuredformorrepresentationofthedifferentialequationsforasystem.
AlinearState-spacemodel:
𝑥 = 𝐴𝑥 + 𝐵𝑢
𝑦 = 𝐶𝑥 + 𝐷𝑢
wherexisthestatevectoranduistheinputvector.Aiscalledthesystem-matrix,andissquareinallcases.
Example:
Thedifferentialequations:

32 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
𝑥2 = −2𝑥2 + 6𝑢
𝑥3 = 2𝑥2
Maybewrittenonstate-spaceform:
𝑥2𝑥3
= −2 02 0
𝑥2𝑥3 + 6
0 𝑢
Function:ss
Description:
Thisfunctionconstructsacontinuousordiscretelinearsystemmodelinstate-spaceform.Youalsocanusethisfunctiontoconverttransferfunctionandzero-pole-gainmodelstostate-spaceform.
Examples:
% Creates a state-space model A = eye(2) B = [0; 1] C = B' SysOutSS = ss(A, B, C) % Converts a zero-pole-gain model to state-space form z = 1 p = [1, -1] k = 1 SysIn = zpk(z, p, k) SysOutSS = ss(SysIn)
[EndofExample]
5.1.3 Transferfunction
ThetransferfunctionofalinearsystemisdefinedastheratiooftheLaplacetransformoftheoutputvariabletotheLaplacetransformoftheinputvariable.
𝐻 𝑆 =𝑦(𝑠)𝑢(𝑠)
Functiontf
Description:

33 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
Thisfunctioncreatesacontinuousordiscretelinearsystemmodelintransferfunctionform.Youalsocanusethisfunctiontoconvertzero-pole-gainandstate-spacemodelstotransferfunctionform.
Examples:
>>s = tf('s')
Thisspecifiesthatyouwanttocreatethecontinuoustransferfunctions/1.Afteryouenterthiscommand,youcanuseLabVIEWMathScriptoperandsonthistransferfunctiontodefineazero-pole-gainortransferfunctionmodel.
SysOutZPK = 4*(s + 2) / (s + 1)
Thisexampleconstructsazero-pole-gainmodelwithagainof4,azeroat-2,andapoleat-1.
SysOutTF = (3*(s*s*s) + 2) / (4*(s*s*s*s) + 8)
Thisexampleconstructsthetransferfunctionmodel3s^3+2/4s^4+8.
[EndofExample]
5.1.4 FirstOrderSystems
Thefollowingtransferfunctiondefinesafirstordersystem:
𝐻 𝑠 =𝐾
𝑇𝑠 + 1
Where
𝐾 isthegain
𝑇 istheTimeconstant
Functionsys_order1
Description:
Thisfunctionconstructsthecomponentsofafirst-ordersystemmodelbasedonagain,timeconstant,anddelaythatyouspecify.Youcanusethisfunctiontocreateeitherastate-spacemodeloratransferfunctionmodel,dependingontheoutputparametersyouspecify.

34 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
Inputs:
KSpecifiesthegainmatrix.Kisarealmatrix.
tauSpecifiesthetimeconstant,inseconds,whichisthetimerequiredforthemodeloutputtoreach63%ofitsfinalvalue.Thedefaultvalueis0.
delaySpecifiestheresponsedelayofthemodel,inseconds.Thedefaultvalueis0.
Examples:
K = 0.5; tau = 1.5; SysOutTF = sys_order1(K, tau);
[EndofExample]
5.1.5 SecondOrderSystems
Astandardsecondordertransferfunctionmodelmaybewrittenlikethis:
𝐻 𝑠 =𝑦(𝑠)𝑢(𝑠) =
𝐾𝜔g3
𝑠3 + 2𝜁𝜔g𝑠 + 𝜔g3=
𝐾𝑠𝜔g
3+ 2𝜁 𝑠
𝜔g+ 1
Where
𝐾 isthegain
𝜁(zetaistherelativedampingfactor
𝜔g[rad/s]istheundampedresonancefrequency.
Functionsys_order2
Description:
Thisfunctionconstructsthecomponentsofasecond-ordersystemmodelbasedonadampingratioandnaturalfrequencyyouspecify.Youcanusethisfunctiontocreateeitherastate-spacemodeloratransferfunctionmodel,dependingontheoutputparametersyouspecify.
Example:
Examplesofhowtousethesys_order2function:
35 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
dr = 0.5 wn = 20 [num, den] = sys_order2(wn, dr) SysTF = tf(num, den) [A, B, C, D] = sys_order2(wn, dr) SysSS = ss(A, B, C, D)
[EndofExample]
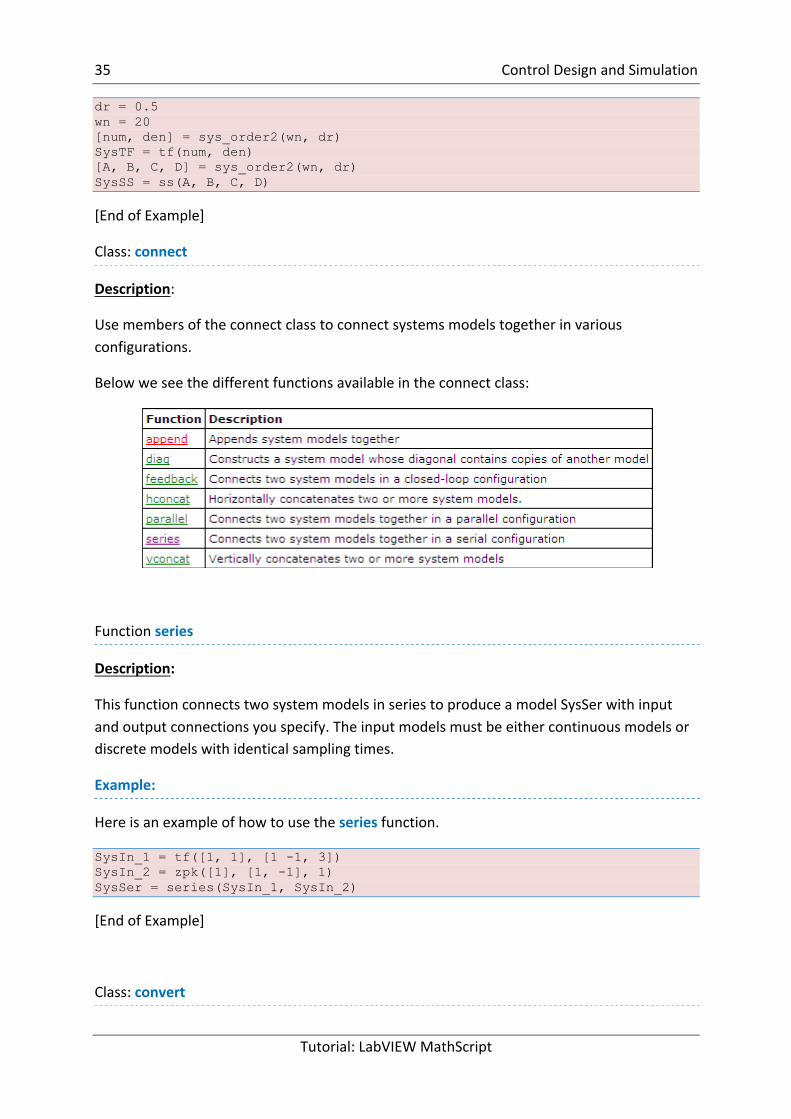
Class:connect
Description:
Usemembersoftheconnectclasstoconnectsystemsmodelstogetherinvariousconfigurations.
Belowweseethedifferentfunctionsavailableintheconnectclass:
Functionseries
Description:
ThisfunctionconnectstwosystemmodelsinseriestoproduceamodelSysSerwithinputandoutputconnectionsyouspecify.Theinputmodelsmustbeeithercontinuousmodelsordiscretemodelswithidenticalsamplingtimes.
Example:
Hereisanexampleofhowtousetheseriesfunction.
SysIn_1 = tf([1, 1], [1 -1, 3]) SysIn_2 = zpk([1], [1, -1], 1) SysSer = series(SysIn_1, SysIn_2)
[EndofExample]
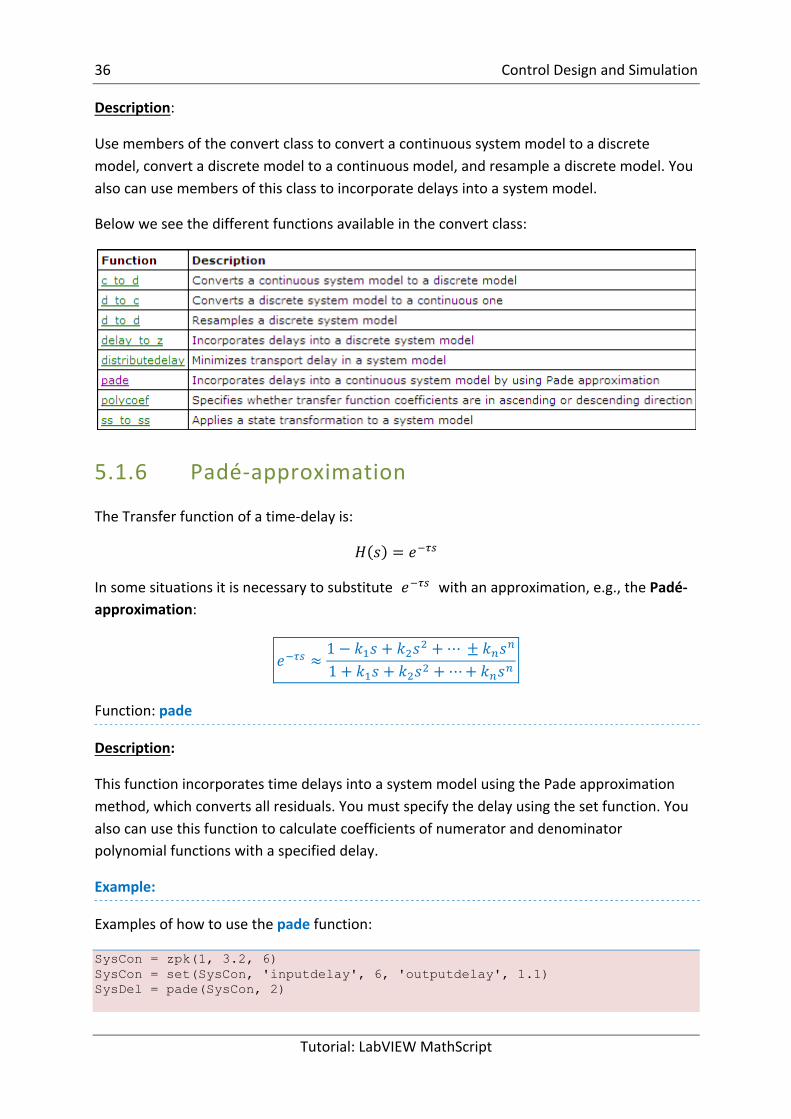
Class:convert
36 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
Description:
Usemembersoftheconvertclasstoconvertacontinuoussystemmodeltoadiscretemodel,convertadiscretemodeltoacontinuousmodel,andresampleadiscretemodel.Youalsocanusemembersofthisclasstoincorporatedelaysintoasystemmodel.
Belowweseethedifferentfunctionsavailableintheconvertclass:
5.1.6 Padé-approximation
TheTransferfunctionofatime-delayis:
𝐻 𝑠 = 𝑒Ymn
Insomesituationsitisnecessarytosubstitute 𝑒Ymn withanapproximation,e.g.,thePadé-approximation:
𝑒Ymn ≈1 − 𝑘2𝑠 + 𝑘3𝑠3 + ⋯± 𝑘5𝑠5
1 + 𝑘2𝑠 + 𝑘3𝑠3 + ⋯+ 𝑘5𝑠5
Function:pade
Description:
ThisfunctionincorporatestimedelaysintoasystemmodelusingthePadeapproximationmethod,whichconvertsallresiduals.Youmustspecifythedelayusingthesetfunction.Youalsocanusethisfunctiontocalculatecoefficientsofnumeratoranddenominatorpolynomialfunctionswithaspecifieddelay.
Example:
Examplesofhowtousethepadefunction:
SysCon = zpk(1, 3.2, 6) SysCon = set(SysCon, 'inputdelay', 6, 'outputdelay', 1.1) SysDel = pade(SysCon, 2)

37 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
delay = 1.2 order = 3 [num, den] = pade(delay, order)
[EndofExample]
5.2 FrequencyResponseAnalysisThefrequencyresponseofasystemisafrequencydependentfunctionwhichexpresseshowasinusoidalsignalofagivenfrequencyonthesysteminputistransferredthroughthesystem.Eachfrequencycomponentisasinusoidalsignalhavingacertainamplitudeandacertainfrequency.
Thefrequencyresponseisanimportanttoolforanalysisanddesignofsignalfiltersandforanalysisanddesignofcontrolsystems.
Thefrequencyresponsecanfoundexperimentallyorfromatransferfunctionmodel.
Thefrequencyresponseofasystemisdefinedasthesteady-stateresponseofthesystemtoasinusoidalinputsignal.Whenthesystemisinsteady-stateitdiffersfromtheinputsignalonlyinamplitude(A)andphaseangle(ω).
Ifwehavetheinputsignal:
𝑢 𝑡 = 𝑈𝑠𝑖𝑛𝜔𝑡
Thesteady-stateoutputsignalwillbe:
𝑦 𝑡 = 𝑈𝐴sin(𝜔𝑡 + 𝜙)
Aand 𝜙 isafunctionofthefrequencyωsowemaywrite 𝐴 = 𝐴 𝜔 ,𝜙 = 𝜙(𝜔)
Foratransferfunction
𝐻 𝑆 =𝑦(𝑠)𝑢(𝑠)
Wehave:
𝐴 𝜔 = 𝐻(𝑗𝜔)
𝜙 𝜔 = ∠𝐻(𝑗𝜔)
Where 𝐻(𝑗𝜔) isthefrequencyresponseofthesystem,i.e.,wemayfindthefrequencyresponsebysetting 𝑠 = 𝑗𝜔 inthetransferfunction.

38 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
5.2.1 BodeDiagram
Bodediagramsareusefulinfrequencyresponseanalysis.TheBodediagramconsistsof2diagrams,theBodemagnitudediagram, 𝐴(𝜔) andtheBodephasediagram, 𝜙(𝜔).
The 𝐴(𝜔)-axisisindecibel(dB)
Wherethedecibelvalueofxiscalculatedas: 𝑥 𝑑𝐵 = 20𝑙𝑜𝑔2g𝑥
The 𝜙(𝜔)-axisisindegrees(notradians)
Function:bode
Description:
ThisfunctioncreatestheBodemagnitudeandBodephaseplotsofasystemmodel.Youalsocanusethisfunctiontoreturnthemagnitudeandphasevaluesofamodelatfrequenciesyouspecify.Ifyoudonotspecifyanoutput,thisfunctioncreatesaplot.
Examples:
Wehavethefollowingtransferfunction
𝐻 𝑠 =𝑦(𝑠)𝑢(𝑠) =
1𝑠 + 1
WewanttoplottheBodediagramforthistransferfunction:
InMathScriptwecouldwrite:

39 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
num=[1]; den=[1,1]; H1=tf(num,den) bode(H1)
[EndofExample]
Function:margin
Description:
Thisfunctioncalculatesand/orplotsthesmallestgainandphasemarginsofasingle-inputsingle-output(SISO)systemmodel.
Thegainmarginindicateswherethefrequencyresponsecrossesat0decibels(“crossoverfrequency”, 𝜔b).
𝐻(𝑗𝑤b)
𝜔b isalsothebandwidthofthesystem
Thephasemarginindicateswherethefrequencyresponsecrosses-180degrees(“crossoverfrequency”, 𝜔2�g).
∠𝐻(𝑗𝑤2�g)
Examples:
Thefollowingexampleillustratestheuseofthemarginfunction.
num = [1] den = [1, 5, 6] H = tf(num, den) margin(H)
[EndofExample]
Example:
Giventhefollowingsystem:
𝐻 𝑆 =1
𝑠 𝑠 + 1 3

40 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
WewanttoplottheBodediagramandfindthecrossover-frequenciesforthesystemusingMathScript.
Weusethefollowingfunctions:tf,bode,marginsandmargin.
• gmfisthegainmarginfrequencies,inradians/second.Againmarginfrequencyindicateswherethemodelphasecrosses-180degrees.
• gmReturnsthegainmarginsofthesystem. • pmfReturnsthephasemarginfrequencies,inradians/second.Aphasemargin
frequencyindicateswherethemodelmagnitudecrosses0decibels. • pmReturnsthephasemarginsofthesystem.• Weget:
BelowweseetheBodediagramwiththecrossover-frequencyandthegainmarginandphasemarginforthesystemplottedin:

41 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
[EndofExample]
TimeResponseClass:timeresp
Description:
Usemembersofthetimerespclasstocreategenericlinearsimulationsandtimedomainplotsforstepinputs,impulseinputs,andinitialconditionresponses.
Belowweseethedifferentfunctionsavailableinthetimerespclass:
Function:step
Description:

42 ControlDesignandSimulation
Tutorial:LabVIEWMathScript
Thisfunctioncreatesastepresponseplotofthesystemmodel.Youalsocanusethisfunctiontoreturnthestepresponseofthemodeloutputs.Ifthemodelisinstate-spaceform,youalsocanusethisfunctiontoreturnthestepresponseofthemodelstates.Thisfunctionassumestheinitialmodelstatesarezero.Ifyoudonotspecifyanoutput,thisfunctioncreatesaplot.
Example:
Giventhefollowingsystem:
𝐻 𝑠 =𝑠 + 1
𝑠3 − 𝑠 + 3
Wewillplotthetimeresponseforthetransferfunctionusingthestepfunction
Theresultisasfollows:
TheMathScriptcode:
H = tf([1, 1], [1, -1, 3]) step(H)
[EndofExample]

43
6 MathScriptNodeThe“MathScriptNode”offersanintuitivemeansofcombininggraphicalandtextualcodewithinLabVIEW.Thefigurebelowshowsthe“MathScriptNode”ontheblockdiagram,representedbythebluerectangle.Using“MathScriptNodes”,youcanenter.mfilescripttextdirectlyorimportitfromatextfile.
YoucandefinenamedinputsandoutputsontheMathScriptNodebordertospecifythedatatotransferbetweenthegraphicalLabVIEWenvironmentandthetextualMathScriptcode.
Youcanassociate.mfilescriptvariableswithLabVIEWgraphicalprogramming,bywiringNodeinputsandoutputs.Thenyoucantransferdatabetween.mfilescriptswithyourgraphicalLabVIEWprogramming.Thetextual.mfilescriptscannowaccessfeaturesfromtraditionalLabVIEWgraphicalprogramming.
TheMathScriptNodeisavailablefromLabVIEWfromtheFunctionsPalette:Mathematics→Scripts&Formulas

44 MathScriptNode
Tutorial:LabVIEWMathScript
IfyouclickCtrl+HyougethelpabouttheMathScriptNode:
Click“Detailedhelp”inordertogetmoreinformationabouttheMathScriptNode.
UsetheNIExampleFinderinordertofindexamples:

45 MathScriptNode
Tutorial:LabVIEWMathScript
6.1 TransferringMathScriptNodesbetweenComputers
IfascriptinaMathScriptNodecallsauser-definedfunction,LabVIEWusesthedefaultsearchpathlisttolinkthefunctioncalltothespecified.mfile.AfteryouconfigurethedefaultsearchpathlistandsavetheVIthatcontainstheMathScriptNode,youdonotneedtoreconfiguretheMathScriptsearchpathlistwhenyouopentheVIonadifferentcomputerbecauseLabVIEWlooksforthe.mfileinthedirectorywherethe.mfilewaslocatedwhenyoulastsavedtheVI.However,youmustmaintainthesamerelativepathbetweentheVIandthe.mfile.
6.2 ExamplesExample:UsingtheMathScriptNode
HereisanexampleofhowyouusetheMathScriptNode.Ontheleftborderyouconnectinputvariablestothescript,ontherightborderyouhaveoutputvariables.Right-clickontheborderandselect“AddInput”or“AddOutput”.

46 MathScriptNode
Tutorial:LabVIEWMathScript
[EndofExample]
Example:CallingaWindowsDLL:
[EndofExample]
Example:Usingm-filesintheMathScriptNode:
UsetheLabVIEWMathScripttocreateam-filescript(oryoumayuseMATLABtocreatethesamescript):

47 MathScriptNode
Tutorial:LabVIEWMathScript
Right-clickontheborderoftheMathScriptNodeandselect“Import”,andthenselectthem-fileyouwanttoimportintotheNode.

48 MathScriptNode
Tutorial:LabVIEWMathScript
Right-clickontherightborderandselect“AddOutput”.Thenright-clickontheoutputvariableandselect“CreateIndicator”.
BlockDiagram:
Theresultisasfollows(clicktheRunbutton):
Ifyou,e.g.,addthefollowingcommandintheMathScriptNode:plot(x),thefollowingwindowappears:
[EndofExample]

49 MathScriptNode
Tutorial:LabVIEWMathScript
6.3 ExercisesUsetheMathScriptNodeandtestthesameexamplesyoudidinapreviouschapter(Chapter4-“LinearAlgebraExamples”).
50
7 MATLABScriptTheMATLABScriptcallstheMATLABsoftwaretoexecutescripts.YoumusthavealicensedcopyoftheMATLABsoftwareversion6.5orlaterinstalledonyourcomputertouseMATLABscriptnodesbecausethescriptnodesinvoketheMATLABsoftwarescriptservertoexecutescriptswrittenintheMATLABlanguagesyntax.BecauseLabVIEWusesActiveXtechnologytoimplementMATLABscriptnodes,theyareavailableonlyonWindows.
51
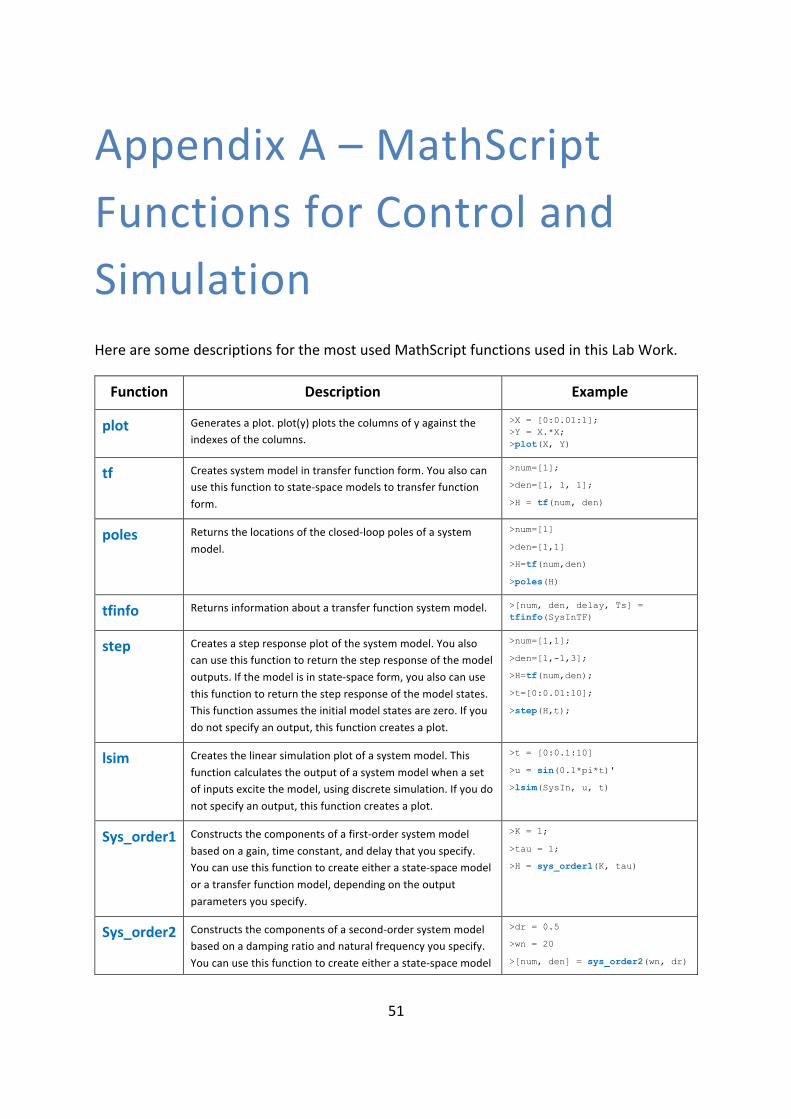
AppendixA–MathScriptFunctionsforControlandSimulationHerearesomedescriptionsforthemostusedMathScriptfunctionsusedinthisLabWork.
Function Description Example
plot Generatesaplot.plot(y)plotsthecolumnsofyagainsttheindexesofthecolumns.
>X = [0:0.01:1]; >Y = X.*X; >plot(X, Y)
tf Createssystemmodelintransferfunctionform.Youalsocanusethisfunctiontostate-spacemodelstotransferfunctionform.
>num=[1];
>den=[1, 1, 1];
>H = tf(num, den)
poles Returnsthelocationsoftheclosed-looppolesofasystemmodel.
>num=[1]
>den=[1,1]
>H=tf(num,den)
>poles(H)
tfinfo Returnsinformationaboutatransferfunctionsystemmodel. >[num, den, delay, Ts] = tfinfo(SysInTF)
step Createsastepresponseplotofthesystemmodel.Youalsocanusethisfunctiontoreturnthestepresponseofthemodeloutputs.Ifthemodelisinstate-spaceform,youalsocanusethisfunctiontoreturnthestepresponseofthemodelstates.Thisfunctionassumestheinitialmodelstatesarezero.Ifyoudonotspecifyanoutput,thisfunctioncreatesaplot.
>num=[1,1];
>den=[1,-1,3];
>H=tf(num,den);
>t=[0:0.01:10];
>step(H,t);
lsim Createsthelinearsimulationplotofasystemmodel.Thisfunctioncalculatestheoutputofasystemmodelwhenasetofinputsexcitethemodel,usingdiscretesimulation.Ifyoudonotspecifyanoutput,thisfunctioncreatesaplot.
>t = [0:0.1:10]
>u = sin(0.1*pi*t)'
>lsim(SysIn, u, t)
Sys_order1 Constructsthecomponentsofafirst-ordersystemmodelbasedonagain,timeconstant,anddelaythatyouspecify.Youcanusethisfunctiontocreateeitherastate-spacemodeloratransferfunctionmodel,dependingontheoutputparametersyouspecify.
>K = 1;
>tau = 1;
>H = sys_order1(K, tau)
Sys_order2 Constructsthecomponentsofasecond-ordersystemmodelbasedonadampingratioandnaturalfrequencyyouspecify.Youcanusethisfunctiontocreateeitherastate-spacemodel
>dr = 0.5
>wn = 20
>[num, den] = sys_order2(wn, dr)

52 Error!Referencesourcenotfound.
Tutorial:LabVIEWMathScript
oratransferfunctionmodel,dependingontheoutputparametersyouspecify.
>SysTF = tf(num, den)
>[A, B, C, D] = sys_order2(wn, dr)
>SysSS = ss(A, B, C, D)
damp Returnsthedampingratiosandnaturalfrequenciesofthepolesofasystemmodel.
>[dr, wn, p] = damp(SysIn)
pid Constructsaproportional-integral-derivative(PID)controllermodelineitherparallel,series,oracademicform.RefertotheLabVIEWControlDesignUserManualforinformationaboutthesethreeforms.
>Kc = 0.5;
>Ti = 0.25;
>SysOutTF = pid(Kc, Ti, 'academic');
conv Computestheconvolutionoftwovectorsormatrices. >C1 = [1, 2, 3];
>C2 = [3, 4];
>C = conv(C1, C2)
series ConnectstwosystemmodelsinseriestoproduceamodelSysSerwithinputandoutputconnectionsyouspecify
>Hseries = series(H1,H2)
feedback Connectstwosystemmodelstogethertoproduceaclosed-loopmodelusingnegativeorpositivefeedbackconnections
>SysClosed = feedback(SysIn_1, SysIn_2)
ss Constructsamodelinstate-spaceform.Youalsocanusethisfunctiontoconverttransferfunctionmodelstostate-spaceform.
>A = eye(2)
>B = [0; 1]
>C = B'
>SysOutSS = ss(A, B, C)
ssinfo Returnsinformationaboutastate-spacesystemmodel. >A = [1, 1; -1, 2]
>B = [1, 2]'
>C = [2, 1]
>D = 0
>SysInSS = ss(A, B, C, D)
>[A, B, C, D, Ts] = ssinfo(SysInSS)
pade IncorporatestimedelaysintoasystemmodelusingthePadeapproximationmethod,whichconvertsallresiduals.Youmustspecifythedelayusingthesetfunction.Youalsocanusethisfunctiontocalculatecoefficientsofnumeratoranddenominatorpolynomialfunctionswithaspecifieddelay.
>[num, den] = pade(delay, order)
>[A, B, C, D] = pade(delay, order)
bode CreatestheBodemagnitudeandBodephaseplotsofasystemmodel.Youalsocanusethisfunctiontoreturnthemagnitudeandphasevaluesofamodelatfrequenciesyouspecify.Ifyoudonotspecifyanoutput,thisfunctioncreatesaplot.
>num=[4];
>den=[2, 1];
>H = tf(num, den)
>bode(H)
bodemag CreatestheBodemagnitudeplotofasystemmodel.Ifyoudonotspecifyanoutput,thisfunctioncreatesaplot.
>[mag, wout] = bodemag(SysIn)
>[mag, wout] = bodemag(SysIn, [wmin wmax])
>[mag, wout] = bodemag(SysIn, wlist)
margin Calculatesand/orplotsthesmallestgainandphasemarginsofasingle-inputsingle-output(SISO)systemmodel.Thegainmarginindicateswherethefrequencyresponsecrossesat0decibels.Thephasemarginindicateswherethefrequencyresponsecrosses-180degrees.UsethemarginsfunctiontoreturnallgainandphasemarginsofaSISOmodel.
>num = [1]
>den = [1, 5, 6]
>H = tf(num, den)
margin(H)

53 Error!Referencesourcenotfound.
Tutorial:LabVIEWMathScript
margins Calculatesallgainandphasemarginsofasingle-inputsingle-output(SISO)systemmodel.Thegainmarginsindicatewherethefrequencyresponsecrossesat0decibels.Thephasemarginsindicatewherethefrequencyresponsecrosses-180degrees.UsethemarginfunctiontoreturnonlythesmallestgainandphasemarginsofaSISOmodel.
>[gmf, gm, pmf, pm] = margins(H)
Formoredetailsaboutthesefunctions,type“helpcdt”togetanoverviewofallthefunctionsusedforControlDesignandSimulation.Fordetailedhelpaboutonespecificfunction,type“help<function_name>”.
Plotsfunctions:Herearesomeusefulfunctionsforcreatingplots:plot,figure,subplot,grid,axis,title,xlabel,ylabel,semilogx–formoreinformationabouttheplotsfunction,type“helpplots”.

Hans-PetterHalvorsen,M.Sc.
E-mail:[email protected]
Blog:http://home.hit.no/~hansha/
UniversityCollegeofSoutheastNorway
www.usn.no