tsrt09 – control theory
TRANSCRIPT

TSRT09 – Control TheoryLecture 10: Phase plane analysis
Claudio Altafini
Reglerteknik, ISY, Linköpings Universitet

Organization-
Labu s evaluated tomorrow 23 Febr.
( zoom , dedicatedlunk )
helpdesk : today
Lab 2 : evaluation March 3rd
( ab 3.
.
cca ro
par edu Swedish
If you need english pm: ask me
1 / 31
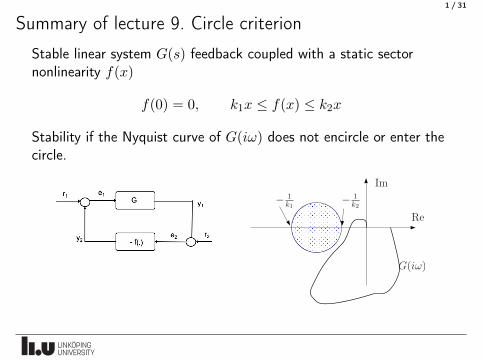
Summary of lecture 9. Circle criterionStable linear system G(s) feedback coupled with a static sector
nonlinearity f(x)
f(0) = 0, k1x f(x) k2x
Stability if the Nyquist curve of G(i!) does not encircle or enter the
circle.
Re
Im
� 1k1
� 1k2
G(i!)
2 / 31
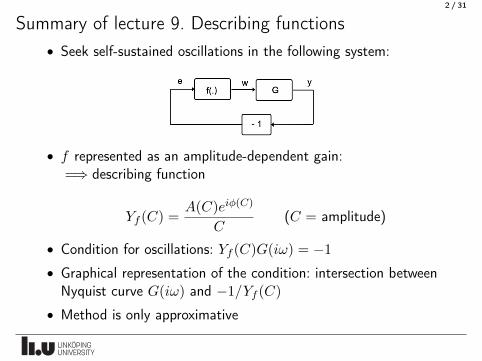
Summary of lecture 9. Describing functions• Seek self-sustained oscillations in the following system:
• f represented as an amplitude-dependent gain:
=) describing function
Yf (C) =A(C)ei�(C)
C(C = amplitude)
• Condition for oscillations: Yf (C)G(i!) = �1
• Graphical representation of the condition: intersection between
Nyquist curve G(i!) and �1/Yf (C)
• Method is only approximative

17µmemit cycle hs%YEaa

3 / 31
Amplitude stability of oscillationsWhat happens if the oscillation is perturbed (e.g. disturbance)?
• Intersection � 1Yf (C) = G(i!) can be thought as the point �1 of
the Nyquist plot of a linear system =) “critical point”
• The direction of the arrow indicates how the value of �1/Yf (C)changes when the amplitude C grows
Re
Im
<latexit sha1_base64="BfN/h9stHIQ9bj62w/Mko+Eekfc=">AAAB+nicbVDLSsNAFL2pr1pfqS7dDBahLiyJiLosduOygn1IG8JkOmmHTh7MTJQS8yluXCji1i9x5984bbPQ1gMXDufcy733eDFnUlnWt1FYWV1b3yhulra2d3b3zPJ+W0aJILRFIh6Jrocl5SykLcUUp91YUBx4nHa8cWPqdx6okCwK79Qkpk6AhyHzGcFKS65ZPu37ApPUztJ71682TjLXrFg1awa0TOycVCBH0zW/+oOIJAENFeFYyp5txcpJsVCMcJqV+omkMSZjPKQ9TUMcUOmks9MzdKyVAfIjoStUaKb+nkhxIOUk8HRngNVILnpT8T+vlyj/yklZGCeKhmS+yE84UhGa5oAGTFCi+EQTTATTtyIywjoKpdMq6RDsxZeXSfusZl/UrNvzSv06j6MIh3AEVbDhEupwA01oAYFHeIZXeDOejBfj3fiYtxaMfOYA/sD4/AE2kZNS</latexit>
� 1
Yf (C)
<latexit sha1_base64="MAw2gtFjR58F758TUhFyKs3/37A=">AAAB8nicbVDLSgNBEJz1GeMr6tHLYBDiJeyKqMegBz1GMA/YLGF2MpsMmccy0yuEkM/w4kERr36NN//GSbIHTSxoKKq66e6KU8Et+P63t7K6tr6xWdgqbu/s7u2XDg6bVmeGsgbVQpt2TCwTXLEGcBCsnRpGZCxYKx7eTv3WEzOWa/UIo5RFkvQVTzgl4KTwrsJxR0vWJ2fdUtmv+jPgZRLkpIxy1Lulr05P00wyBVQQa8PATyEaEwOcCjYpdjLLUkKHpM9CRxWRzEbj2ckTfOqUHk60caUAz9TfE2MirR3J2HVKAgO76E3F/7wwg+Q6GnOVZsAUnS9KMoFB4+n/uMcNoyBGjhBquLsV0wExhIJLqehCCBZfXibN82pwWfUfLsq1mzyOAjpGJ6iCAnSFauge1VEDUaTRM3pFbx54L9679zFvXfHymSP0B97nDwt9kHM=</latexit>
G(i!)
Stable oscillation
G- Cc e co : MYOfc conure ofG
encircles the " Coronae
pooed"- 1-
Year>
a TEE•Coq ← c. → saga of du s 026 .
To -s deeper Rede ofthee a seedgrow
asc-s Ce
C = Cz > co : Wen encirclement
→ Snafu ofstab .→ sempre tede decreases
4 / 31
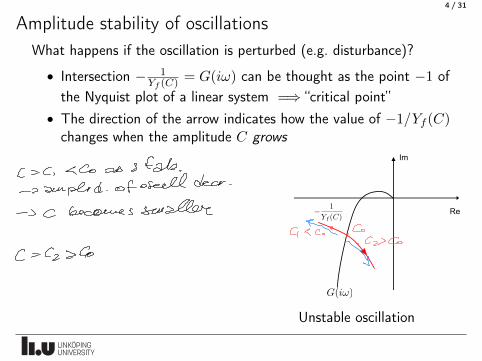
Amplitude stability of oscillationsWhat happens if the oscillation is perturbed (e.g. disturbance)?
• Intersection � 1Yf (C) = G(i!) can be thought as the point �1 of
the Nyquist plot of a linear system =) “critical point”
• The direction of the arrow indicates how the value of �1/Yf (C)changes when the amplitude C grows
Re
Im
<latexit sha1_base64="BfN/h9stHIQ9bj62w/Mko+Eekfc=">AAAB+nicbVDLSsNAFL2pr1pfqS7dDBahLiyJiLosduOygn1IG8JkOmmHTh7MTJQS8yluXCji1i9x5984bbPQ1gMXDufcy733eDFnUlnWt1FYWV1b3yhulra2d3b3zPJ+W0aJILRFIh6Jrocl5SykLcUUp91YUBx4nHa8cWPqdx6okCwK79Qkpk6AhyHzGcFKS65ZPu37ApPUztJ71682TjLXrFg1awa0TOycVCBH0zW/+oOIJAENFeFYyp5txcpJsVCMcJqV+omkMSZjPKQ9TUMcUOmks9MzdKyVAfIjoStUaKb+nkhxIOUk8HRngNVILnpT8T+vlyj/yklZGCeKhmS+yE84UhGa5oAGTFCi+EQTTATTtyIywjoKpdMq6RDsxZeXSfusZl/UrNvzSv06j6MIh3AEVbDhEupwA01oAYFHeIZXeDOejBfj3fiYtxaMfOYA/sD4/AE2kZNS</latexit>
� 1
Yf (C)
<latexit sha1_base64="MAw2gtFjR58F758TUhFyKs3/37A=">AAAB8nicbVDLSgNBEJz1GeMr6tHLYBDiJeyKqMegBz1GMA/YLGF2MpsMmccy0yuEkM/w4kERr36NN//GSbIHTSxoKKq66e6KU8Et+P63t7K6tr6xWdgqbu/s7u2XDg6bVmeGsgbVQpt2TCwTXLEGcBCsnRpGZCxYKx7eTv3WEzOWa/UIo5RFkvQVTzgl4KTwrsJxR0vWJ2fdUtmv+jPgZRLkpIxy1Lulr05P00wyBVQQa8PATyEaEwOcCjYpdjLLUkKHpM9CRxWRzEbj2ckTfOqUHk60caUAz9TfE2MirR3J2HVKAgO76E3F/7wwg+Q6GnOVZsAUnS9KMoFB4+n/uMcNoyBGjhBquLsV0wExhIJLqehCCBZfXibN82pwWfUfLsq1mzyOAjpGJ6iCAnSFauge1VEDUaTRM3pFbx54L9679zFvXfHymSP0B97nDwt9kHM=</latexit>
G(i!)
Unstable oscillation
C = C ,eco ⇒ s fats
.
→ anper d. ofoseell dear .
-S C becomes smallerc, • G.cz>G
C = Cz > Co \I

5 / 31
Amplitude stability of oscillationsWhat happens if G(i!) and �1/Yf (C) do not intersect each other?
Re
Im
<latexit sha1_base64="BfN/h9stHIQ9bj62w/Mko+Eekfc=">AAAB+nicbVDLSsNAFL2pr1pfqS7dDBahLiyJiLosduOygn1IG8JkOmmHTh7MTJQS8yluXCji1i9x5984bbPQ1gMXDufcy733eDFnUlnWt1FYWV1b3yhulra2d3b3zPJ+W0aJILRFIh6Jrocl5SykLcUUp91YUBx4nHa8cWPqdx6okCwK79Qkpk6AhyHzGcFKS65ZPu37ApPUztJ71682TjLXrFg1awa0TOycVCBH0zW/+oOIJAENFeFYyp5txcpJsVCMcJqV+omkMSZjPKQ9TUMcUOmks9MzdKyVAfIjoStUaKb+nkhxIOUk8HRngNVILnpT8T+vlyj/yklZGCeKhmS+yE84UhGa5oAGTFCi+EQTTATTtyIywjoKpdMq6RDsxZeXSfusZl/UrNvzSv06j6MIh3AEVbDhEupwA01oAYFHeIZXeDOejBfj3fiYtxaMfOYA/sD4/AE2kZNS</latexit>
� 1
Yf (C)
<latexit sha1_base64="MAw2gtFjR58F758TUhFyKs3/37A=">AAAB8nicbVDLSgNBEJz1GeMr6tHLYBDiJeyKqMegBz1GMA/YLGF2MpsMmccy0yuEkM/w4kERr36NN//GSbIHTSxoKKq66e6KU8Et+P63t7K6tr6xWdgqbu/s7u2XDg6bVmeGsgbVQpt2TCwTXLEGcBCsnRpGZCxYKx7eTv3WEzOWa/UIo5RFkvQVTzgl4KTwrsJxR0vWJ2fdUtmv+jPgZRLkpIxy1Lulr05P00wyBVQQa8PATyEaEwOcCjYpdjLLUkKHpM9CRxWRzEbj2ckTfOqUHk60caUAz9TfE2MirR3J2HVKAgO76E3F/7wwg+Q6GnOVZsAUnS9KMoFB4+n/uMcNoyBGjhBquLsV0wExhIJLqehCCBZfXibN82pwWfUfLsq1mzyOAjpGJ6iCAnSFauge1VEDUaTRM3pFbx54L9679zFvXfHymSP0B97nDwt9kHM=</latexit>
G(i!)
Re
Im
<latexit sha1_base64="BfN/h9stHIQ9bj62w/Mko+Eekfc=">AAAB+nicbVDLSsNAFL2pr1pfqS7dDBahLiyJiLosduOygn1IG8JkOmmHTh7MTJQS8yluXCji1i9x5984bbPQ1gMXDufcy733eDFnUlnWt1FYWV1b3yhulra2d3b3zPJ+W0aJILRFIh6Jrocl5SykLcUUp91YUBx4nHa8cWPqdx6okCwK79Qkpk6AhyHzGcFKS65ZPu37ApPUztJ71682TjLXrFg1awa0TOycVCBH0zW/+oOIJAENFeFYyp5txcpJsVCMcJqV+omkMSZjPKQ9TUMcUOmks9MzdKyVAfIjoStUaKb+nkhxIOUk8HRngNVILnpT8T+vlyj/yklZGCeKhmS+yE84UhGa5oAGTFCi+EQTTATTtyIywjoKpdMq6RDsxZeXSfusZl/UrNvzSv06j6MIh3AEVbDhEupwA01oAYFHeIZXeDOejBfj3fiYtxaMfOYA/sD4/AE2kZNS</latexit>
� 1
Yf (C)
<latexit sha1_base64="MAw2gtFjR58F758TUhFyKs3/37A=">AAAB8nicbVDLSgNBEJz1GeMr6tHLYBDiJeyKqMegBz1GMA/YLGF2MpsMmccy0yuEkM/w4kERr36NN//GSbIHTSxoKKq66e6KU8Et+P63t7K6tr6xWdgqbu/s7u2XDg6bVmeGsgbVQpt2TCwTXLEGcBCsnRpGZCxYKx7eTv3WEzOWa/UIo5RFkvQVTzgl4KTwrsJxR0vWJ2fdUtmv+jPgZRLkpIxy1Lulr05P00wyBVQQa8PATyEaEwOcCjYpdjLLUkKHpM9CRxWRzEbj2ckTfOqUHk60caUAz9TfE2MirR3J2HVKAgO76E3F/7wwg+Q6GnOVZsAUnS9KMoFB4+n/uMcNoyBGjhBquLsV0wExhIJLqehCCBZfXibN82pwWfUfLsq1mzyOAjpGJ6iCAnSFauge1VEDUaTRM3pFbx54L9679zFvXfHymSP0B97nDwt9kHM=</latexit>
G(i!)
Vanishing oscillation Unbounded growing oscillations
* the
6 / 31
Lecture 10
Phase plane analysis
• Linear phase plane
• Nonlinear phase plane
In the book: Ch. 13

7 / 31
Phase plane• Phase space: old name for state space
• Phase plane: 2-dimensional state space
• Phase portrait: graphical way to describe phase plane
• Often we simulated x1(t) and x2(t) separately as functions of
time; here instead they are represented as a single curve
• Can be sketched using eigenvalues and eigenvectors of matrix A
• Alternatively, it can be simulated from a number of initial
conditions
• Part of the results obtained in dimension 2 can be generalized to
higher dimension
"
t÷⇒.
"
tinea
8 / 31
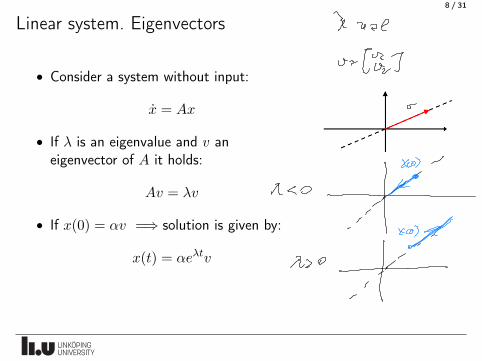
Linear system. Eigenvectors
• Consider a system without input:
x = Ax
• If � is an eigenvalue and v an
eigenvector of A it holds:
Av = �v
• If x(0) = ↵v =) solution is given by:
x(t) = ↵e�tv
I real
a- frog
or
%?no
":#AM

Casey ar . . .
,an all desoiuct
=D exist n eigenvectors un - . . ✓a
EcoleFE,
air. =D Ect) -- Zai editor .
Casey Ae . . . Au arenot distract as they may
or may not have eogeuieeoaes
EI a- 2 12=9, of multiple.2
1) J - f. Tho %) 2 blocks of tan r→ 2 eageeuee toes
2) J- [ Mf ha,] a blade of tui 2→ duly z edgewater .

• geometric Walterpliantly et ai = ne of Joedeer blades
• algebraic cuueorpliooly of Ri = sum of the awnof all Toedsee blade
of of eigenvectors for ai a geometric meltage. otar← ai of Jordan blocks
-
De Tai I - o K c
'
⇐ , as . so .
Ref ai ] so for some i =D has Ods.
ou [ai] E ont i and Thi set.
Re Enif - o
is as solvated to Jordan GCooks of duty
as stats . Cboo no Easywept . >

9 / 31
Classification of equilibrium points
The phase portrait near an equilibrium point depends on whether the
eigenvalues are real or complex, and on the sign of the real part
in doin z
O- - --•a O O
÷@ re
•

10 / 31
Distinct real eigenvalues: node• Two real, distinct and
negative eigenvalues
�1 < �2 < 0
Stable
• Two real, distinct and positive
eigenvalues
0 < �2 < �1
Unstable
Eigenvector and their ratio determine the phase portrait
- w
slow fastfast Flow× sate't
,t.ae/htrzVn(fast ) Vr Cfast)
Elstow ) uz Glow)
II's .

11 / 31
Distinct real eigenvalues: node (cont’d)
−10 −5 0 5 10−10
−8
−6
−4
−2
0
2
4
6
8
10
t=10s
x1
x2
• ”fast
eigenvector”:
�1 = �2.4
• ”slow
eigenvector”:
�2 = �0.52

12 / 31
Distinct real eigenvalues: : saddle point• Two real eigenvalues with different sign
�1 < 0 < �2
• Stable subspace: if (and only if) initial condition is exactly on
the stable eigenspace (x(0) = ↵v1) then solution is stable
- ~
ve be
on general Vz
Idol =44 the Oz
special case
XEF 2, on
-re

13 / 31
Identical eigenvalues: node• Identical eigenvalues: both real �1 = �2 = �
(1) Jordan form J =
� 10 �
�=) only 1 eigenvector
� < 0
Stable node
� > 0
Unstable node
re

14 / 31
Identical eigenvalues: star node• Identical eigenvalues: both real �1 = �2 = �
(2) Jordan form J =
� 00 �
�=) 2 independent eigenvectors
� < 0
Stable star node
� > 0
Unstable star node

15 / 31
Complex conjugate eigenvalues: focus• Complex conjugate eigenvalues �1,2 = � ± i!
� < 0
Stable focus
� > 0
Unstable focus
:# HE

16 / 31
Complex conjugate eigenvalues: focus
• Typical form of Jordan block
x =
� �!! �
�x
• Alternative form: polar coordinates
(x1 = r cos �
x2 = r sin �=)
(r = �r
� = !
• Solution is a spiral since � grows (! > 0 imaginary part)
• Distance to the origin
1. decreases if � < 0 =) asympt. stability
2. grows if � > 0 =) instability
(zeal Toedsee four )
C- talons
f- please
f is'
decreasing

in.- w
!h=t A. =D , -_ a multiple 2
.
I -_f%⇐J- Ae,-_o±iw
The = Gt dw
J - { The %) neo- c'wO as
A real

17 / 31
Purely imaginary eigenvalues: center• Purely imaginary eigenvalues �1,2 = ±i!
• In polar coordinates
(r = �r = 0
� = !=) r = const
• If � = 0 distance to the origin is constant, and the solution is a
circle around the origin
•SOable but
woe asgwp.sk.

18 / 31
Continuum of equilibria• One zero, one non-zero eigenvalues:
�1 = 0, �2 6= 0 real
�2 < 0
Stable
�2 > 0
Unstable
x. =#x x -r
ex = 0
walls pace Av -- o is economize →panda]
Yz
on
( botuotasyuyf.sk)

19 / 31
Relationship between linear and nonlinear system(near equilibrium point)
Linear system
x = Ax
has equilibrium point for x = 0
1. node, focus or saddle
point
2. center
3. continuum of equlibria
�1 = 0, �2 6= 0
Nonlinear system near x = 0
x = Ax + g(x),|g(x)||x|
x!0�! 0
has equilibrium point
1. same type
2. can be either a (stable/unstable)
focus or a center
3. can be a (stable/unstable) node,
or saddle point or a continuum of
equilibria
I -fed air dins 2
YaiI # 0 → decidable cases
Re Cai ]--o
lou decidable cases
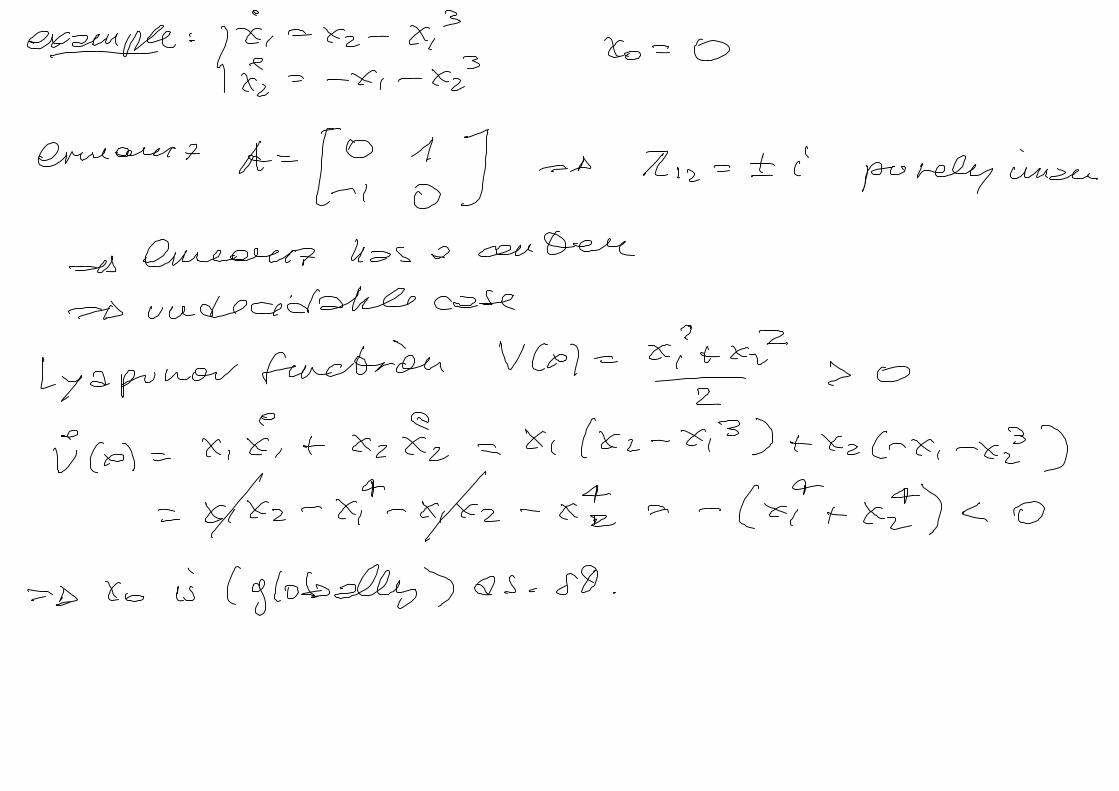
exude : foie - xz - XP Xo = O
£2 = -X, - XP
evueaiett A-- JI, to ] as Riz = I c'
purely imam
=D Omelet has acar Ieee
=D undecidable case,
Lyapunov functionVce) = xitxF- S OZ
J (e) = X ,I, t Xz £2 = Xc (K2 - 43 ) txzcnx,
-xp )= xfxz - xih-xfxz-x.dz = - (xTtxI) e o
=D Xo is ( globally) as . SO .

exe I, = Xa t x? Xo = o
E = -x, t XP
dice : A = II, I ] → undecidable case
Lyap . final : VA)=xE > o
2
V. Co) = x , xectxexz =. . .
= x Ft XF > 0
Vcd keeps growing =D diverge !=D Xo is unstable
as 2 syst with same lrueeeeitabeoii but opposer de
stability at equil

20 / 31
Phase portrait away from equilibrium points• Nonlinear second order system
x1 = f1(x1, x2)
x2 = f2(x1, x2)
• Construct the ratio of derivates
dx2
dx1=
dx2
dt
dt
dx1=
x2
x1=
f2(x1, x2)
f1(x1, x2)
• slope for (x1, x2) is
• horizontal when f2(x1, x2) = 0• vertical when f1(x1, x2) = 0
• phase plane behavior from the limit values
limx1!±1
f2(x1, x2)
f1(x1, x2), lim
x2!±1
f2(x1, x2)
f1(x1, x2)
Towerozonic agemeatsp -
*⇒µ
thorough srumleetiaesplotCee , xD

21 / 31
Example: phase plane for generator/pendulumSystem: x1 = x2
x2 = �ax2 � b sin x1
• equilibria: x0 =
±2k⇡
0
�
• linearization
A =
0 1
�b �a
�
• eigenvalues:
�1,2 = (�a ±p
a2 � 4b)/2
= � ± i!
• =) stable focus
• equilibria: x0 =
⇡ ± 2k⇡
0
�
• linearization
A =
0 1b �a
�
• eigenvalues:
�1,2 = (�a ±p
a2 + 4b)/2
�1 < 0, �2 > 0
• =) saddle point
X. = angle
} k= aug .wel
.
down up
25- stable vase .
Tl.

22 / 31
Example: phase plane for generator/pendulum
−4 −3 −2 −1 0 1 2 3 4−4
−3
−2
−1
0
1
2
3
4
• Equilibrium point in the origin is a stable focus• Equilibrium points in (±⇡, 0) are saddle points (red lines show
eigenvectors)
plot her , Eu ) "quaver
"
↳ to↳
y
t•- - • - - - ti
¢l
l
l
ll

23 / 31
Example: epidemic model
Example: epidemic model
dS
dt= �↵SI
dI
dt= ↵SI � �I
dR
dt= �I
Variables:
• S = susceptible
• I = infected
• R = removed
Parameters:
• ↵ = infectivity rate (1 < ↵ 10)
• � = removal rate (� = 1)
S,I,R > 0
(recovered + deceased)\me, .mg , ,§Rfftd§tfI=0 =D scat Ict> I
equilibria : I - O,
StR=N (25-3)=0
5- Fg equilibria : Orioles (5. I. E) set.I -- O 5th-N → continuumof
equilibria

* t. ÷:÷¥⇒÷t÷÷ :o)detente -H) --dot II o ) - idea -ashes) -o
o -B d
Nez = O 23=25-B
if 25- B > o =D 57 Bz ⇒ Az so ⇒ unstable
if 45 -Bee ⇒ azero ⇒ undecidable case

Ro = reproductive 224in = IB
dff -- ASI-BI - (Fs s -DRI = B. (Ros - 1) IIf Ro > Is =D TIE 20 =D rid of infected gum,
If Ro est as IIe To ⇒ rioter feeEad desires
Carta dug spreading-decrease 2 ( social distancing , vaccine)- aware- se p ( drugs>

phase portrait in ⇐II place
÷÷.
%⇒"flattening the curve
"← I

24 / 31
Example: epidemic model• low infectivity rate: ↵ = 1.5
0 5 10 15 20
time
0
0.2
0.4
0.6
0.8
1
S
I
R
0 0.2 0.4 0.6 0.8 1
S
0
0.2
0.4
0.6
0.8
1
I
• high infectivity rate: ↵ = 5
0 5 10 15 20
time
0
0.2
0.4
0.6
0.8
1
S
I
R
0 0.2 0.4 0.6 0.8 1
S
0
0.2
0.4
0.6
0.8
1
I
FELL
25 / 31
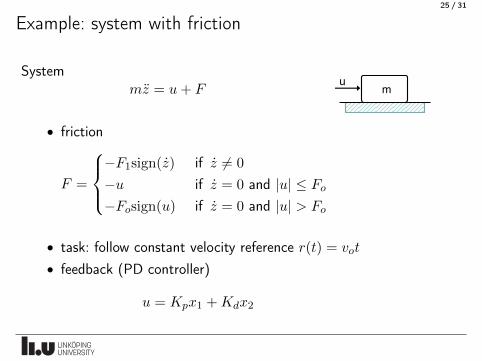
Example: system with friction
System
mz = u + F mu
• friction
F =
8><
>:
�F1sign(z) if z 6= 0
�u if z = 0 and |u| Fo
�Fosign(u) if z = 0 and |u| > Fo
• task: follow constant velocity reference r(t) = vot
• feedback (PD controller)
u = Kpx1 + Kdx2

26 / 31
Example: system with friction• state variables x1 = error = r � z
x2 = velocity error = x1
• closed loop state space model
x1 = x2
x2 =1
m(�u � F ) =
1
m(�Kpx1 � Kdx2 � F )
• parameters: vo = 1, m = 1, Fo = 1.5, F1 = 1, Kp = 1
• piece-wise linear system: switching between linear modes
x1 = x2
x2 =
8><
>:
�x1 � Kdx2 + sign(1 � x2) if x2 6= 1
0 if x2 = 1, |x1 + Kd| 1.5
�x1 � Kdx2 + 1.5sign(x1 + Kd) if x2 = 1, |x1 + Kd| > 1.5

27 / 31
Example: system with friction
• 3 important regions in state space
(a) if x2 > 1
x1 = x2
x2 = �x1 � Kdx2 � 1
(b) if x2 < 1
x1 = x2
x2 = �x1 � Kdx2 + 1
(c) if x2 = 1 and |x1 + Kd| 1.5
x1 = x2
x2 = 0
(d) if x2 = 1 and |x1 + Kd| > 1.5(not important: immediately switches to (a) or (b))

28 / 31
Example: system with friction
• Equilibria analysis
(a) if x2 > 1 (x1 = �1
x2 = 0=) the equil is outside the region itself
(b) if x2 < 1 (x1 = 1
x2 = 0
(c) if x2 = 1 and |x1 + Kd| 1.5 =) no equilibrium
• Linearization (for (a) and (b))
A =
0 1
�1 �Kd
�=) �1,2 = �Kd
2± 1
2
qK2
d � 4

29 / 31
Example: system with friction
�1,2 = �Kd
2± 1
2
qK2
d � 4
Possible cases for the equilibrium in (a) and (b)
1. Kd = 0 (i.e. P controller): �1,2 = ±i =) center
2. 0 < Kd < 2 : �1,2 complex conjugate =) stable focus
3. Kd = 2 : �1,2 = �Kd2 =) real, negative eigenval of multipl. 2
4. Kd > 2 : �1,2 =) two distinct, real, negative eigenvalues

30 / 31
Example: system with friction
Kd = 0.1 Kd = 0.02

31 / 31
Two examples with three state variables
Examples of generalization to higher dimension
Stable ”focus node”
(focus + one real eigenvalue)
−1−0.5
00.5
1
−1−0.5
00.5
10
0.2
0.4
0.6
0.8
1
Stable equilibrium with 3 distinct
real eigenvalues
(generalization of 2 distinct real
eigenvalues case)
0
0.2
0.40.6
0.8
1
0
0.5
1
0
0.2
0.4
0.6
0.8
1

TSRT09 Control Theory 2021,Lecture 10
www.liu.se