trellis-based parallel stereo matching
DESCRIPTION
Trellis-based Parallel Stereo Matching. 2007. 4. 9. Media Processor Lab. Sejong univ. E-mail : [email protected] Dong-seok Kim. Contents. Introduction Stereo Vision Model Center-referenced space Constraints on disparity Estimating optimal disparity Experimental results Conclusion. - PowerPoint PPT PresentationTRANSCRIPT

Media Processor Lab.Media Processor Lab.
Trellis-based Parallel Stereo Matching
2007. 4. 9.Media Processor Lab. Sejong univ.
E-mail : [email protected] Kim

# 2.Media Processor Lab.Media Processor Lab.
Contents
Introduction Stereo Vision Model Center-referenced space Constraints on disparity Estimating optimal disparity Experimental results Conclusion

# 3.Media Processor Lab.Media Processor Lab.
Introduction
Stereo vision is an inverse process that attempts to restore the original scene from a pair of images.
In this paper a new basis for disparity based on center-referenced coordinates is presented that is concise and complete in terms of constraint representation.
# 4.Media Processor Lab.Media Processor Lab.
Stereo Vision Model (1)
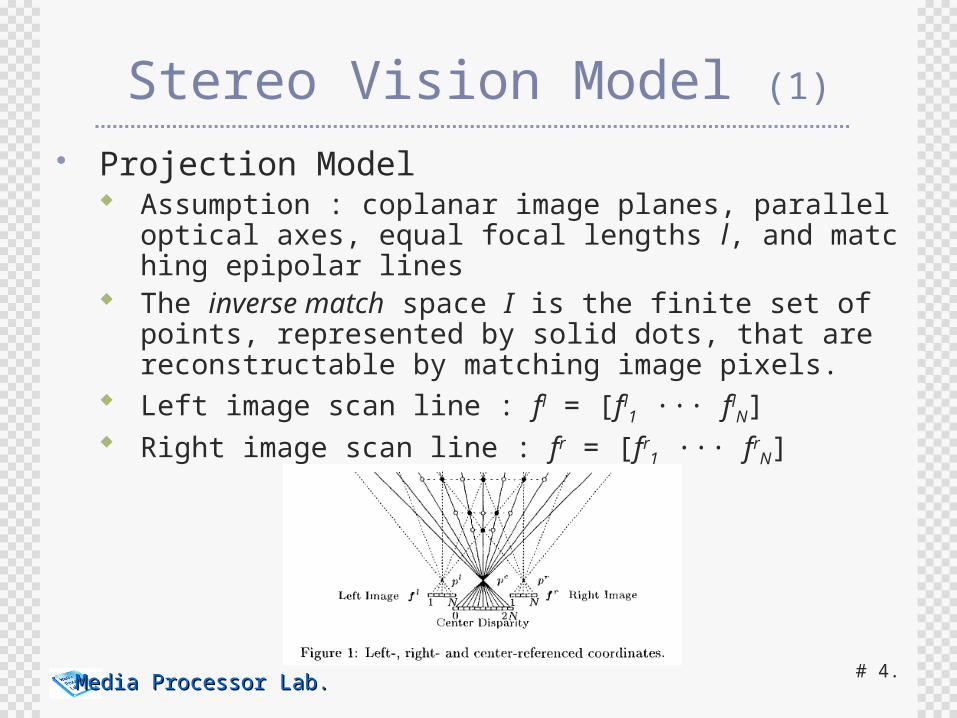
Projection Model Assumption : coplanar image planes, parallel optical axes,
equal focal lengths l, and matching epipolar lines The inverse match space I is the finite set of points, repres
ented by solid dots, that are reconstructable by matching image pixels.
Left image scan line : fl = [fl1 ··· fl
N] Right image scan line : fr = [fr
1 ··· frN]

# 5.Media Processor Lab.Media Processor Lab.
Stereo Vision Model (2)
Representation of Correspondence Each element of each scan line can
have a corresponding element in the other image scan line, denoted (fl
i, frj)
be occluded in the other image scan line, denoted (fli, Ø) for a left
image element (right occlusion) and (Ø, fri) for a right image elem
ent (left occlusion)
Left-referenced disparity map : dl = [dl1 ··· dl
N] Disparity value : dl
i ⇔ (fli, fr
i+dli)
Right-referenced disparity map : dr = [dr1 ··· dr
N] Disparity value : dr
j ⇔ (fli+dr
j ,fr
j)
.

# 6.Media Processor Lab.Media Processor Lab.
Center-referenced space (1)
Using only left- or right-referenced disparity, it is difficult to represent common matching constraints with respect to both images.
An alternate center-referenced projection The focal point pc located at the midpoint between the foca
l points for the left and right image plane Plane with 2N + 1 and focal length of 2l The projection lines intersect with the horizontal iso-dispar
ity lines forms the inverse space D.

# 7.Media Processor Lab.Media Processor Lab.
Center-referenced space (2)
Center-referenced disparity vector d = [d0 ··· d2N] disparity value di indicates the depth index of a real world
point along the projection line from site i on the center image plane
If di is a match point : (fl(i – dj + 1)/2
, fr(i + dj + 1)/2
)
(fli , fr
j) is denoted by the disparity di + j – 1 = j – i
The odd function o(x) is used to indicate if di is a match point, that is o(i + di) = 1 when di is a match point.

# 8.Media Processor Lab.Media Processor Lab.
Center-referenced space (3)
Represent occlusions by assigning the highest possible disparity (Fig. 3)
The correspondence (fl
5 , fr
8) creates a right
occlusion for which the real object could lie anywhere in the triangular Right Occlusion Region (ROR)
If only I is used, then the match points (solid dots) in the ROR are used.
D contains additional occlusion points (open dots) in the ROR that are further to the right, which are used instead.

# 9.Media Processor Lab.Media Processor Lab.
Constraints on disparity
Parallel axes : di ≥ 0
Endpoints : d0 = d2N = 0
Cohesiveness : di – di – 1 ∈ {–1, 0, 1}
Uniqueness : o(i + di) = 1⇒ di–1 = di = di+1

# 10.Media Processor Lab.Media Processor Lab.
Estimating optimal disparity DP techniques progressing through the trellis from left to right (site i = 0,
…, 2N). In recursive form, the shortest path algorithm for disparity is formally given by: Initialization : Endpoint has zero disparity
Recursion : At each site i = 1, … 2N, find the best path into each node j. if i+j is even,
otherwise
Termination : i = 2N and j = 0.
Reconstruction : Backtrack the decisions..

# 11.Media Processor Lab.Media Processor Lab.
Experimental results

# 12.Media Processor Lab.Media Processor Lab.
Conclusion
We have used a center-referenced projection to represent the discrete inverse space for stereo correspondence.
This space D contains additional occlusion points which we exploit to create a concise representation of correspondence and occlusion.
The algorithm was tested on both real and synthetic image pairs with good results.