towards accident free driving - etsi accident free driving ... how do we know what is behind the...
TRANSCRIPT

ETSI SUMMIT:
5G FROM MYTH TO REALITY
TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen,
General Manager Car 2 Car Communication Consortium
© All rights reserved

How do we stop the cars colliding
First step is to try to ensure that all objects in the traffic is
seen and reacted to, but
But what about blind spots ?
How do we see around corners
How do we know what is behind the next bend on the road ?
How do we know that there is a hazard ?
How do we see through the lorry in front of us ?
C-ITS is providing the help by letting the vehicles talk together
21-04-2016 2
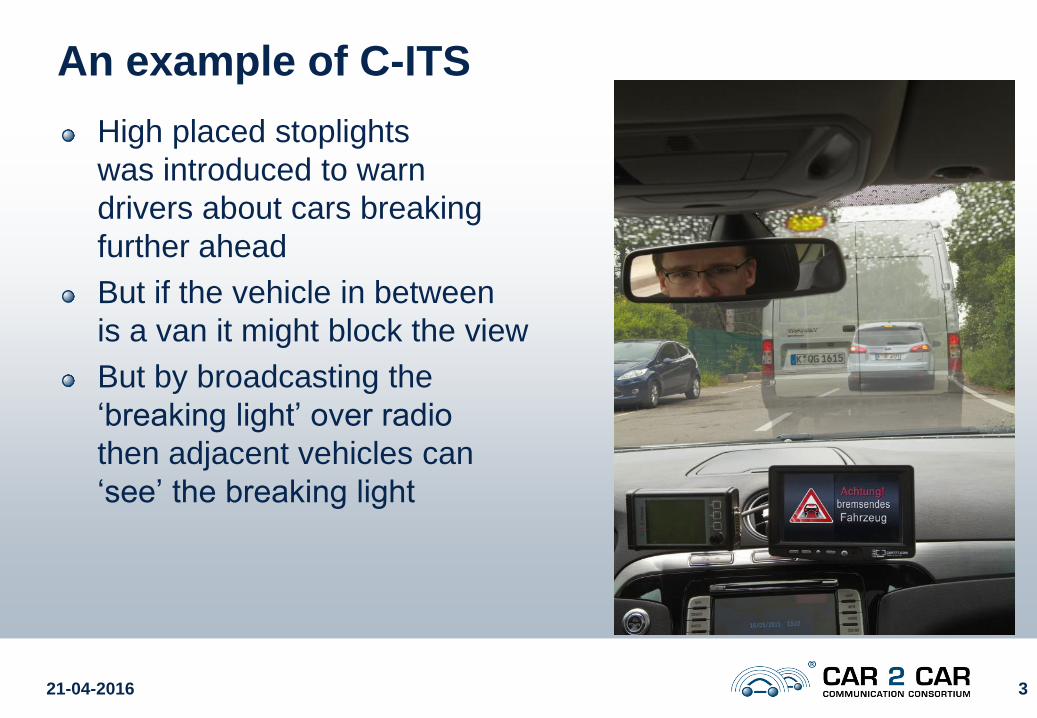
An example of C-ITS
High placed stoplights
was introduced to warn
drivers about cars breaking
further ahead
But if the vehicle in between
is a van it might block the view
But by broadcasting the
‘breaking light’ over radio
then adjacent vehicles can
‘see’ the breaking light
21-04-2016 3

The C2C-CC is a non-profit organization initiated and formed 2002 by
European vehicle manufacturers
Mission and objective
Support the Vehicle2X deployment
Develop guidelines for a Car2Car communication system
Develop realistic deployment strategies
Establish open European standards for a Car2Car communication system
Push harmonisation of C2C Communication Standards worldwide
Use of Free of charge European wide exclusive frequency band (5.9 GHz)
CAR 2 CAR Communication Consortium
21-04-2016 4

CAR 2 CAR Communication Consortium
Members
Major Automotive Stakeholders
16 Vehicle Manufacturers
36 Suppliers
28 Research Organisations
21-04-2016 5
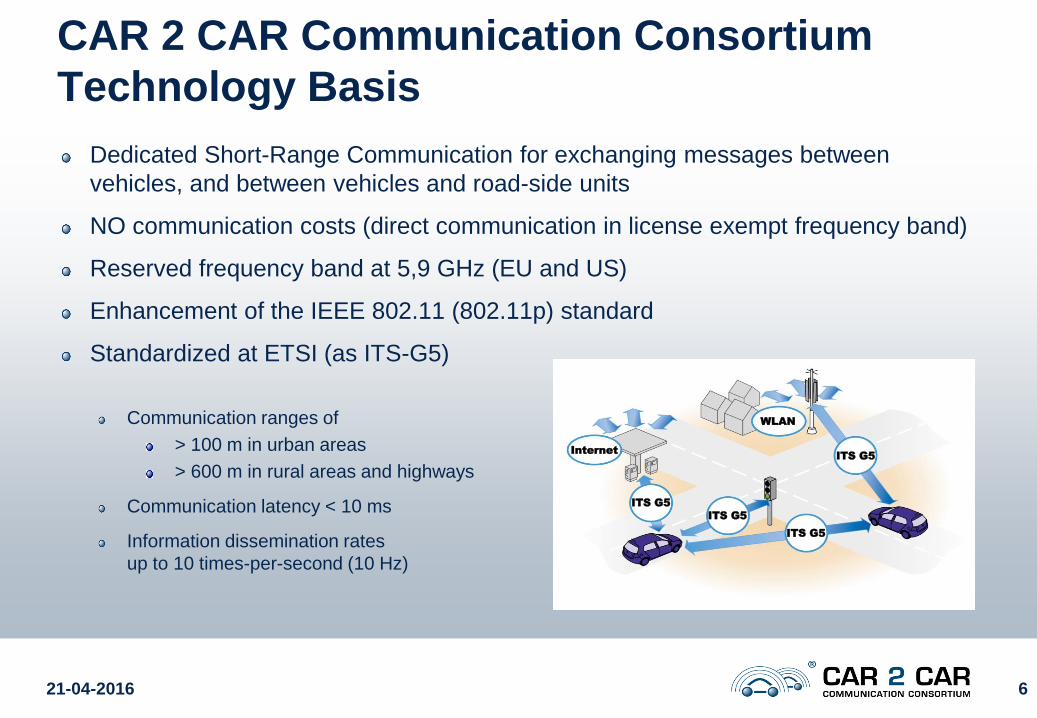
Dedicated Short-Range Communication for exchanging messages between
vehicles, and between vehicles and road-side units
NO communication costs (direct communication in license exempt frequency band)
Reserved frequency band at 5,9 GHz (EU and US)
Enhancement of the IEEE 802.11 (802.11p) standard
Standardized at ETSI (as ITS-G5)
Communication ranges of
> 100 m in urban areas
> 600 m in rural areas and highways
Communication latency < 10 ms
Information dissemination rates
up to 10 times-per-second (10 Hz)
CAR 2 CAR Communication Consortium
Technology Basis
WLAN
ITS G5
ITS G5
ITS G5
ITS G5
Internet
21-04-2016 6
C2C-CC – Guiding principles for V2X roadmaps
Focus on information exchange (between traffic participants)
Cooperate on providing information
Provide clearly defined information (standards)
Use commonly agreed air-interfaces (WLANp)
Focus on localized dissemination patterns (geo-areas)
The information provided has to build “on top of each other”
Compete in capitalizing on the information (applications)
Each traffic participant can (freely) use the received information
Automatic driving functions are enhanced
21-04-2016 7

V2X Roadmaps – Applications
0
20
40
60
80
100
100% installation of new vehicle sales
100% installation of new vehicle plattforms
10 year ramp-up to 100% installation of newvehicles
Installation on select new vehicle type ofluxury and upper middle class vehicles
Take-over of the
driving functions
• Fully Automated
Driving
• Optimal Traffic
Flow
Status Data
• Intersection Collision W
• Emergency Vehicle W
• Dangerous Situation W
• Stationary Vehicle W
• Traffic-Jam W
• Pre-/Post-Crash W
• Hazardous Location W
• Adverse Weather W
• Roadworks W 1.0
Sensor Data
• GLOSA 1.0
• In-Vehicle Information
• Roadworks W 2.0
• Connected ACC
• Overtaking W
• VRU Warning 1.0
• ...
Intention Data
• GLOSA 2.0
• Roadworks Assistance
• Lane-Merge Assistance
• Area Reservation
• Cooperative ACC
• VRU Warning 2.0
• Platooning
• …
Coordination Data
• Cooperative Merging
• Overtaking Assistance
• Intersection Assistance
• Dynamic Platooning
• VRU Assistance
• …
Phase 1
Awareness Driving
Phase 2
Sensing Driving
Phase 3
Cooperative Driving
Phase 5
Accident-free
Driving
Phase 4
Synchronized
Cooperative Driving
Dissemination Cooperation
Automation Level
21-04-2016 8

V2X Roadmaps – Applications
0
20
40
60
80
100
100% installation of new vehicle sales
100% installation of new vehicle plattforms
10 year ramp-up to 100% installation of newvehicles
Installation on select new vehicle type ofluxury and upper middle class vehicles
Take-over of the
driving functions
• Fully Automated
Driving
• Optimal Traffic
Flow
Status Data
• Intersection Collision W
• Emergency Vehicle W
• Dangerous Situation W
• Stationary Vehicle W
• Traffic-Jam W
• Pre-/Post-Crash W
• Hazardous Location W
• Adverse Weather W
• Roadworks W 1.0
Sensor Data
• GLOSA 1.0
• In-Vehicle Information
• Roadworks W 2.0
• Connected ACC
• Overtaking W
• VRU Warning 1.0
• ...
Intention Data
• GLOSA 2.0
• Roadworks Assistance
• Lane-Merge Assistance
• Area Reservation
• Cooperative ACC
• VRU Warning 2.0
• Platooning
• …
Coordination Data
• Cooperative Merging
• Overtaking Assistance
• Intersection Assistance
• Dynamic Platooning
• VRU Assistance
• …
Phase 1
Awareness Driving
Phase 2
Sensing Driving
Phase 3
Cooperative Driving
Phase 5
Accident-free
Driving
Phase 4
Synchronized
Cooperative Driving
Dissemination Cooperation
Automation Level
21-04-2016 9

Day
0
21-04-2016 10
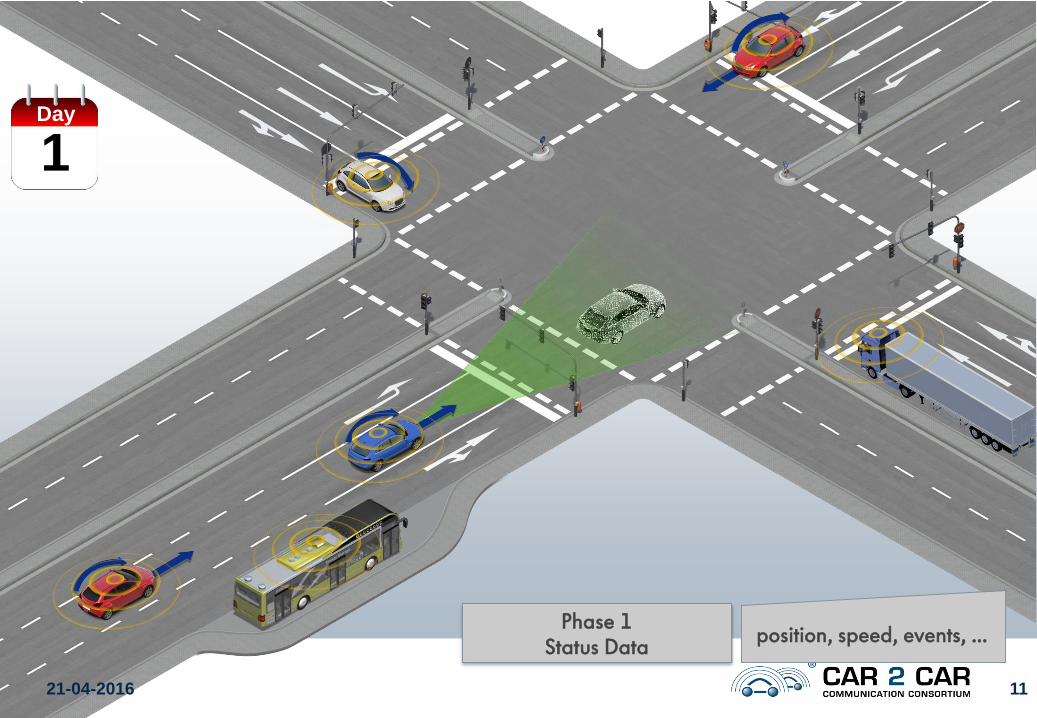
Phase 1
Status Dataposition, speed, events, …
Day
1
21-04-2016 11

Phase 1
Status Data
Phase 2
Sensor Data+
position, speed, events, …
objects, field-of-view, …
Day
2
21-04-2016 12

V2X Roadmaps – Applications
0
20
40
60
80
100
100% installation of new vehicle sales
100% installation of new vehicle plattforms
10 year ramp-up to 100% installation of newvehicles
Installation on select new vehicle type ofluxury and upper middle class vehicles
Take-over of the
driving functions
• Fully Automated
Driving
• Optimal Traffic
Flow
Status Data
• Intersection Collision W
• Emergency Vehicle W
• Dangerous Situation W
• Stationary Vehicle W
• Traffic-Jam W
• Pre-/Post-Crash W
• Hazardous Location W
• Adverse Weather W
• Roadworks W 1.0
Sensor Data
• GLOSA 1.0
• In-Vehicle Information
• Roadworks W 2.0
• Connected ACC
• Overtaking W
• VRU Warning 1.0
• ...
Intention Data
• GLOSA 2.0
• Roadworks Assistance
• Lane-Merge Assistance
• Area Reservation
• Cooperative ACC
• VRU Warning 2.0
• Platooning
• …
Coordination Data
• Cooperative Merging
• Overtaking Assistance
• Intersection Assistance
• Dynamic Platooning
• VRU Assistance
• …
Phase 1
Awareness Driving
Phase 2
Sensing Driving
Phase 3
Cooperative Driving
Phase 5
Accident-free
Driving
Phase 4
Synchronized
Cooperative Driving
Dissemination Cooperation
Automation Level
21-04-2016 13
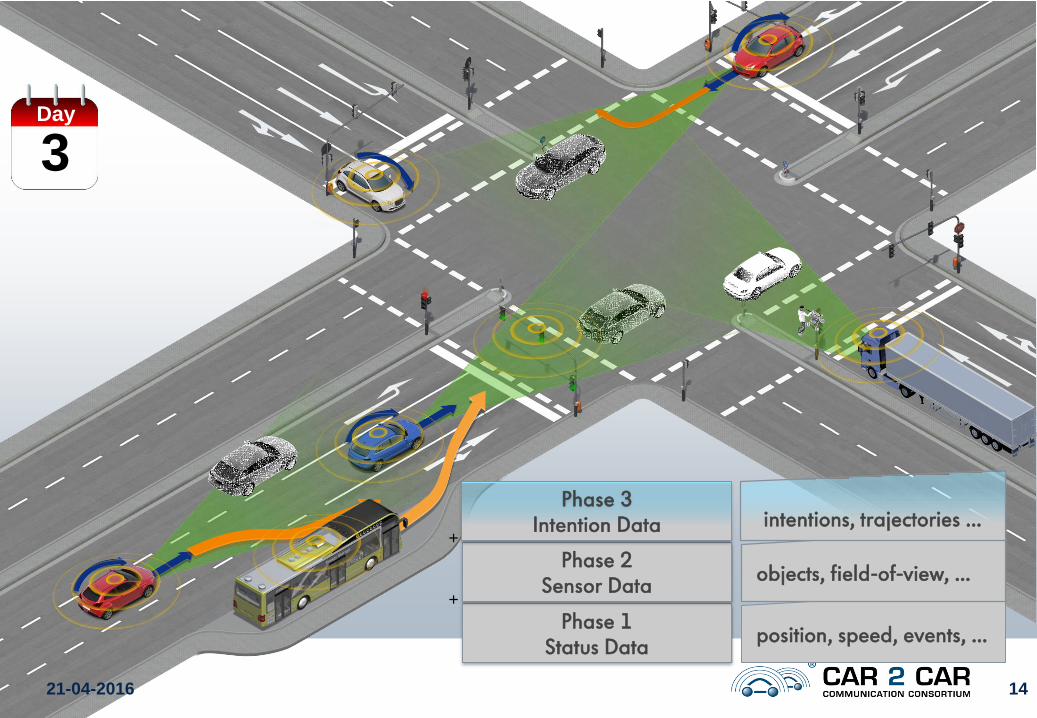
Phase 1
Status Data
Phase 2
Sensor Data
Phase 3
Intention Data
+
+
position, speed, events, …
objects, field-of-view, …
intentions, trajectories …
Day
3
21-04-2016 14
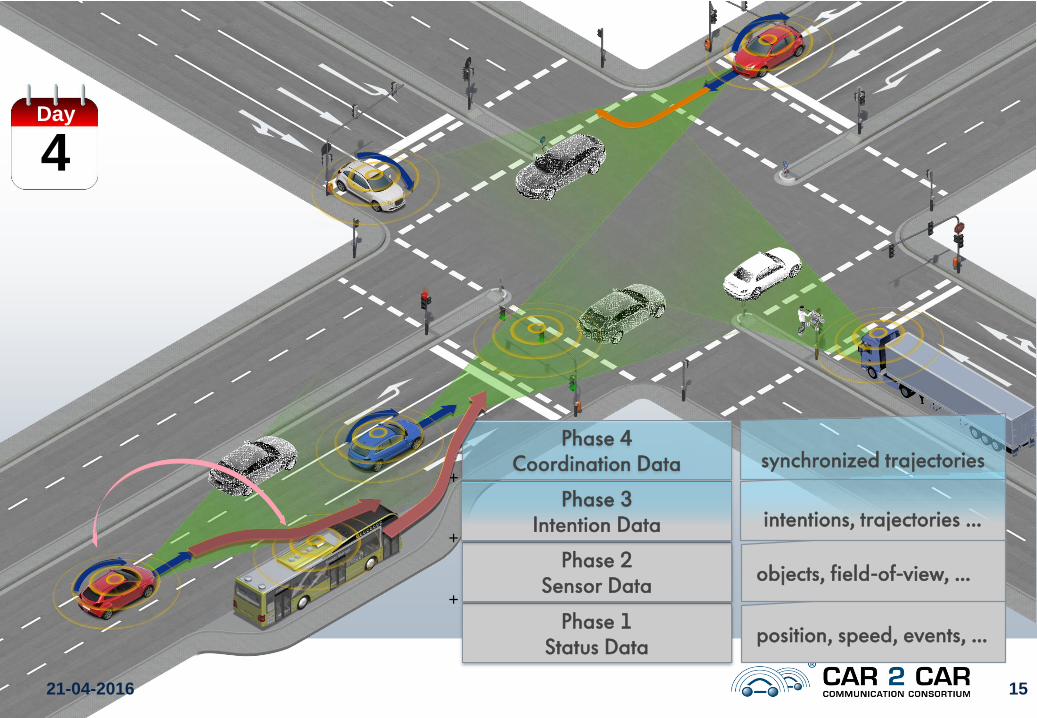
Phase 1
Status Data
Phase 2
Sensor Data
Phase 3
Intention Data
Phase 4
Coordination Data
+
+
+
position, speed, events, …
objects, field-of-view, …
intentions, trajectories …
synchronized trajectories
Day
4
21-04-2016 15
What could be the benefits of connected and automated driving?As compiled from discussions within the Amsterdam Group
Vehicle manufacturers
• Optimal navigation through optimal information
A very exact prognosis of the traffic
• Enable automatic driving over large parts of individual trips
Very exact positioning (absolute and relative)
Increased availability (also on snowy roads, less perfect markings)
Infrastructure operators
• Reduce maintenance costs
• Optimize the capacity and usage of their network
Digital traffic signs / Digital data collection
IRSs could complement less-perfect markings
Increased availability (also on snowy roads, less perfect markings)
21-04-2016 16
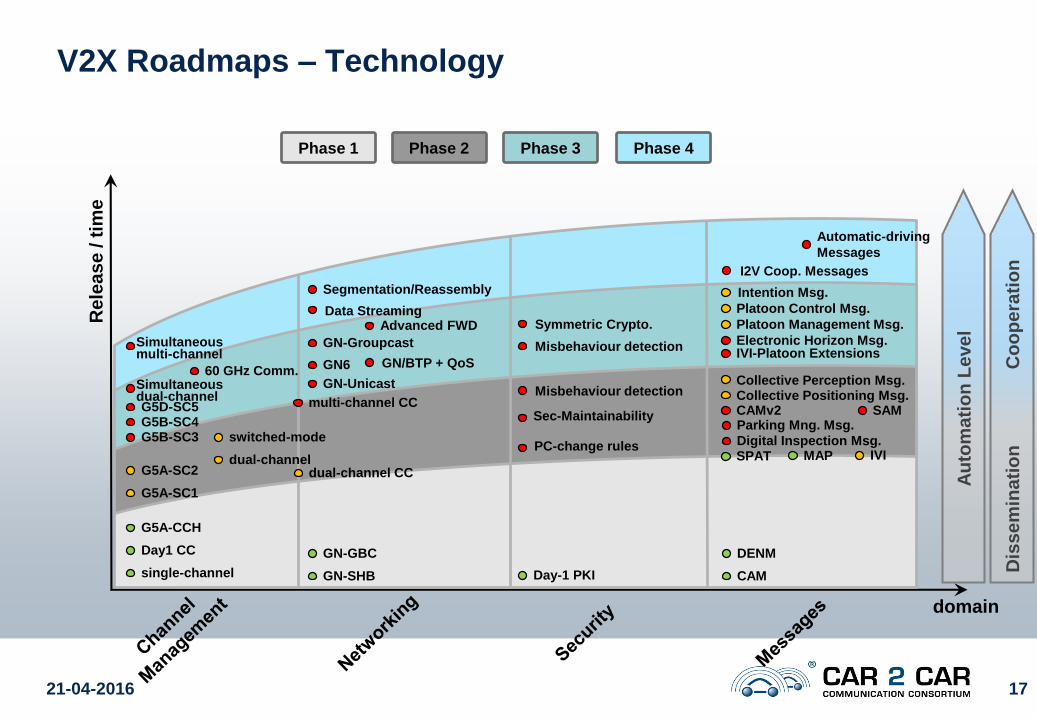
V2X Roadmaps – Technology R
ele
as
e / t
ime
Phase 1 Phase 2 Phase 3 Phase 4
domain
CAM
DENM
GN-SHB
GN-GBC
single-channel
G5A-CCH
Day1 CC
SPAT MAP IVI
Platoon Management Msg.
Parking Mng. Msg.
GN-Unicast
GN6
Intention Msg.
Automatic-driving
Messages
G5A-SC1
G5A-SC2
G5B-SC3G5B-SC4G5D-SC5
dual-channel
switched-mode
GN-Groupcast
Segmentation/Reassembly
multi-channel CC
I2V Coop. Messages
Collective Perception Msg.
GN/BTP + QoS
Advanced FWD
Misbehaviour detection
SAM
Day-1 PKI
Sec-Maintainability
PC-change rules
dual-channel CC
Simultaneousdual-channel
Simultaneousmulti-channel
Dis
se
min
ati
on
Co
op
era
tio
n
Data Streaming Platoon Control Msg.
Collective Positioning Msg.
Electronic Horizon Msg.
Digital Inspection Msg.
60 GHz Comm.
CAMv2
Au
tom
ati
on
Le
ve
l
IVI-Platoon Extensions
Symmetric Crypto.
Misbehaviour detection
21-04-2016 17

What could be the use cases for 5G in vehicles
• Map update for highly automatic driving - Instantly update the
map of vehicle's surrounding. The challenge of this use case
is that the vehicle is currently in the tile that needs to be
updated, hence a very quick update is required.
• Precise Positioning high speed, no GPS, support for
vehicles without high precision location tracking like cars
• Audio / Video Streaming (Entertainment)
• Online Gaming - side jobs
• Sensor- and State Map Sharing (Sensor Raw Data) -
Transmit raw sensor data such that others can use their own
classifiers to infer decisions
21-04-2016 18
What could be the use cases for 5G
• Camera and Radar sharing to improve visibility, including
See-Through Share sensor information to augment ego
vehicle's view. Allows for better visibility in presence of
obstructing vehicles, heavy rain / fog, etc.
• Short-Term Sensor sharing for crash mitigation - Mitigate
crash between multiple vehicle by last-minute traffic
exchange
• Traffic forwarding using cars as relays Extend coverage
or improve efficiency by using the car as a relay
• Teleoperated Driving "Let car be controlled by off-site driver
/ car operator e.g. car sharing, taxi operator, …“
• Augemented Reality, e.g. Daytime-Visibility at night)
21-04-2016 19

Thank You!
Questions?
21-04-2016 20