topological path planning jbnu, division of computer science and engineering parallel computing lab...
TRANSCRIPT
Topological Path Planning
JBNU, Division of Computer Science and EngineeringParallel Computing Lab
Jonghwi Kim
Introduction to AI Robots
Chapter 9
Chapter Objectives
• Define the difference between a natural and artificial landmark and give one example of each
• Given a description of an indoor office environment and a set of behaviors, build a relational graph representation labeling the distinctive places and local control strategies using gateways
• Describe in one or two sentences : gateway, image signature, visual homing, viewframe, orientation region
• Given a figure showing landmarks, create a topological map showing landmarks, landmark pair boundaries, and orientation regions
Contents
•Overview• Landmarks and Gateways•Relational Methods•Associative Methods•Case Study of Topological
Navigation with a Hybrid Architecture
•Summary

Overview
Route representations fall into one of two approaches :
•Relational most popular giving the robot an abbreviated, “connect the dots”
graph-style of spatial memory use an explicit representation, support path planning focus on the graph-like representation of spatial
memory
•Associative better for retracing known paths focus on coupling sensing with localization

Landmarks and Gateways
•Landmark one or more perceptually distinctive features of
interest on an object or locale of interest not necessarily a single can be a grouping of objects
McDonald’s stand of aspen trees

Landmarks and Gateways
•Landmark be either artificial or natural “artificial” and “natural” ≠ “man-made” and
“organic”
• artificial landmark set of features added to an existing object or locale in
order to either support recognition of the landmark or some other perceptual activity

Landmarks and Gateways
•Landmark• natural landmark
configuration of existing features selected for recognition which were not expressly designed for the perceptual activity

Landmarks and Gateways
•Landmark must satisfy three criteria
Be readily recognizable Support the task dependent activity Be perceivable from many different viewpoints
• good landmark’s characteristics passive in order to be available despite a power
failure should be perceivable over the entire range where
the robot might need to see it should have distinctive features, and, if possible,
unique feature
Landmarks and Gateways
•Gateway an opportunity for a robot to change its overall
direction of navigation critical for localization, path planning, and map
making

Relational Methods
•Relational methods represent the world as a graph or network of nodes
and edges
• Nodes gateways, landmarks, or goals
• Edges a navigable path between two nodes can attach additional information
– direction(N,S,E,W), approximate distance, terrain type, the behaviors needed to navigate that path

Relational Methods
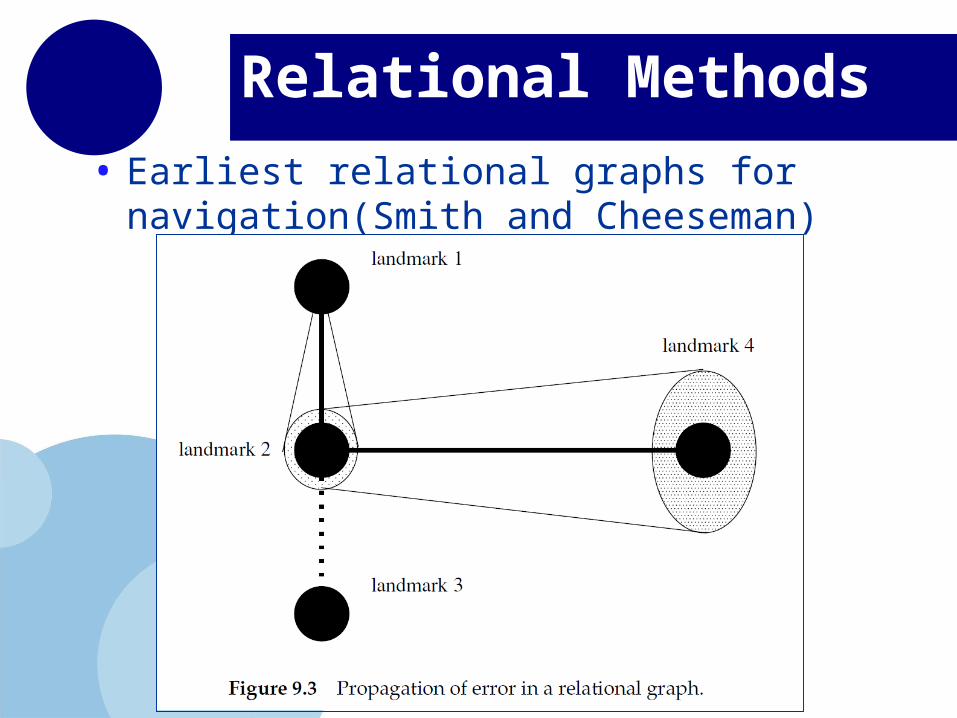
• Earliest relational graphs for navigation(Smith and Cheeseman)
Relational Methods
• Earliest relational graphs for navigation(Smith and Cheeseman)
Relational Methods
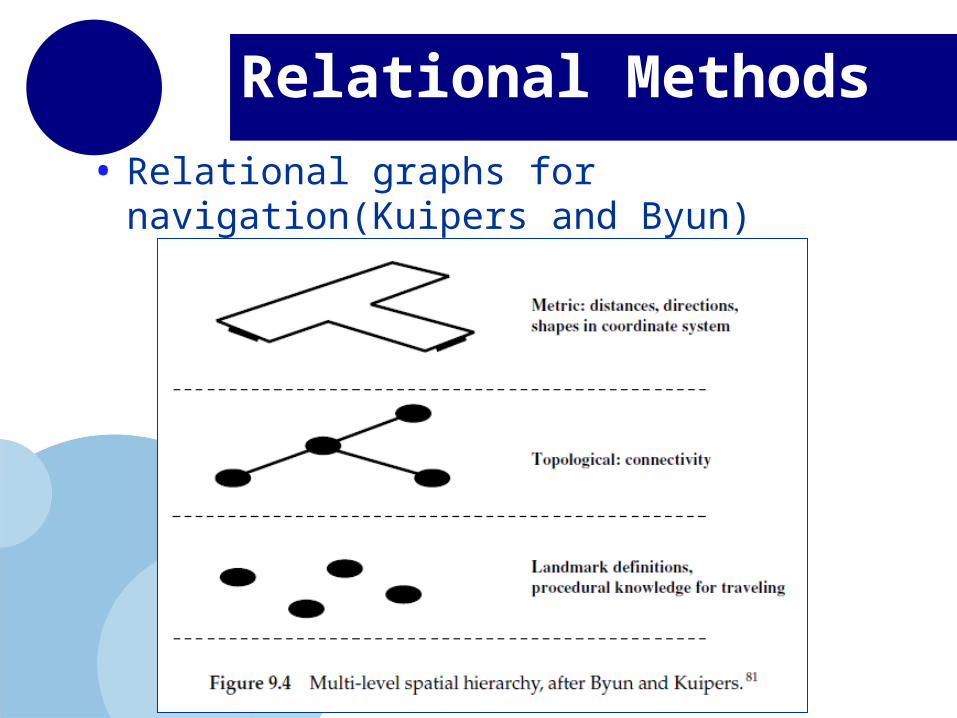
• Relational graphs for navigation(Kuipers and Byun)

Relational Methods
•Distinctive places landmark that the robot could detect from a nearby
region called a neighborhood
Associative Methods
•Associative methods create a behavior which converts sensor
observations into the direction to go to reach a particular landmark
• assumption perceptual stability : that views of the location that are close together
should look similar perceptual distinguishability : that views far away should look different

Associative Methods
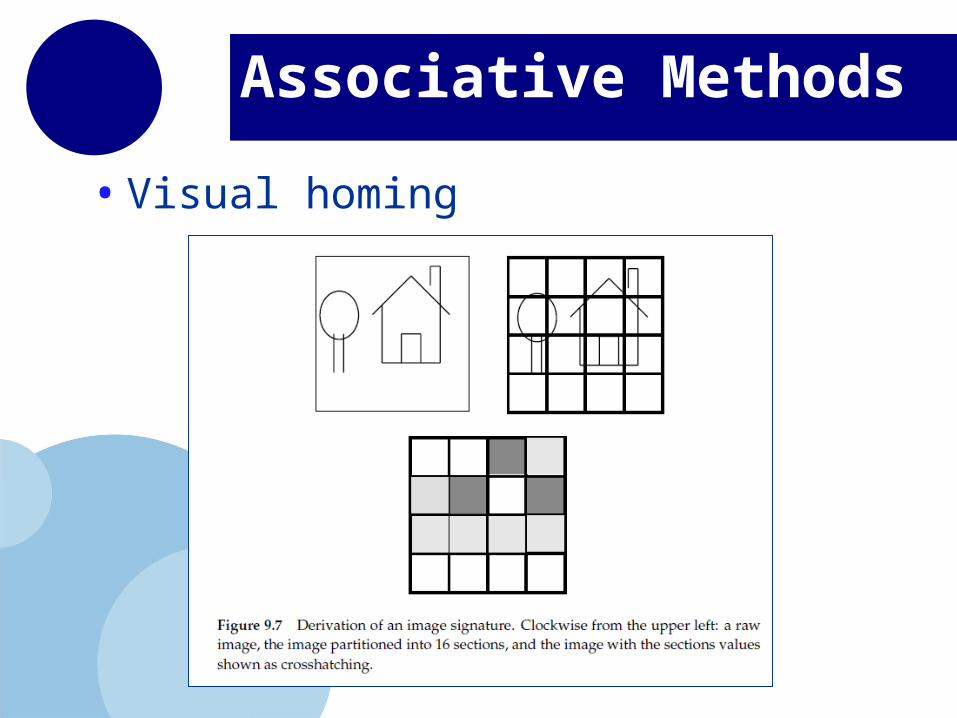
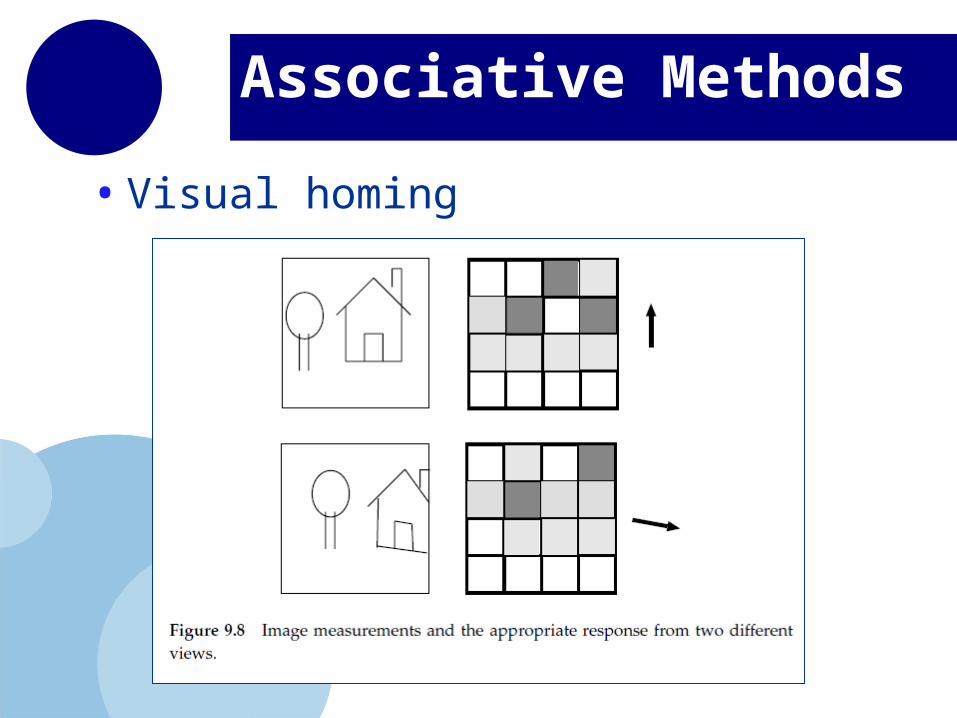
•Visual homing work done by Nelson, and later by Engelson• image signature
• created by partitioning an image into sections• possible measurement
• edge density• dominant edge orientation• average intensity• so on…
Associative Methods
•Visual homing
Associative Methods
•Visual homing
Associative Methods
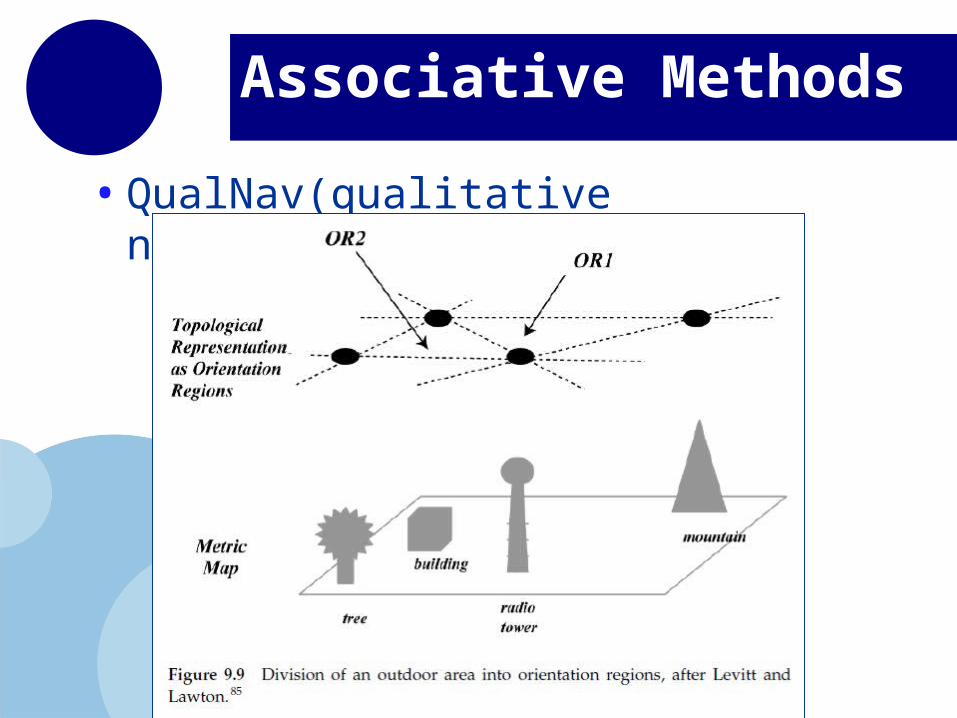
•QualNav(qualitative navigation) the ideas from Levitt and Lawton for outdoor navigation over large
distances as part of the Defense Advance Research Projects Agency (DARPA) Autonomous Land Vehicle (ALV) project in the late 1980’s
Associative Methods
•QualNav(qualitative navigation)

Case Study of Topological Navigation with a Hybrid Architecture
Case study of topological navigation using the SFX architecture in 1994 AAAI Mobile Robot Competition by a team of undergraduates form the Colorado School of Mines
Case Study of Topological Navigation with a Hybrid Architecture
placed in a random room navigate out of the room and to
another room within 15 minutes be given a topological map
How the topological map was entered the activities of Cartographer
How scripts were used to simplify behavioral management, and the lessons learned

Case Study of Topological Navigation with a Hybrid Architecture
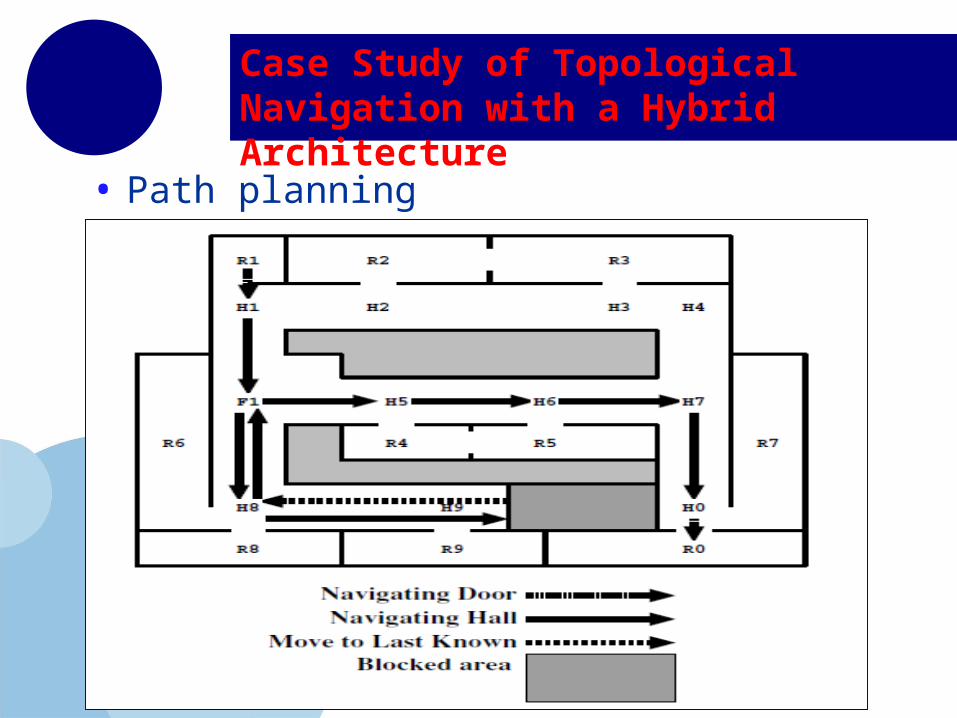
• Path planning a sample topological map
start nodes direction blockages landmark

Case Study of Topological Navigation with a Hybrid Architecture
• Path planning Cartographer
input : a gateway type, start node, goal node output : a list of nodes representing the best path
preprocessing reclassifying (a hall to door connection as Hd) eliminates extraneous gateways
Task Manager select the appropriate abstract navigation
behaviord

Case Study of Topological Navigation with a Hybrid Architecture
• Path planning

Case Study of Topological Navigation with a Hybrid Architecture
• Path planning

Case Study of Topological Navigation with a Hybrid Architecture
• Path planning
Case Study of Topological Navigation with a Hybrid Architecture
• Path planning

Case Study of Topological Navigation with a Hybrid Architecture
• Navigation scripts used to specify and carry out the implied details of the
plan
navigate-door ANB
Case Study of Topological Navigation with a Hybrid Architecture
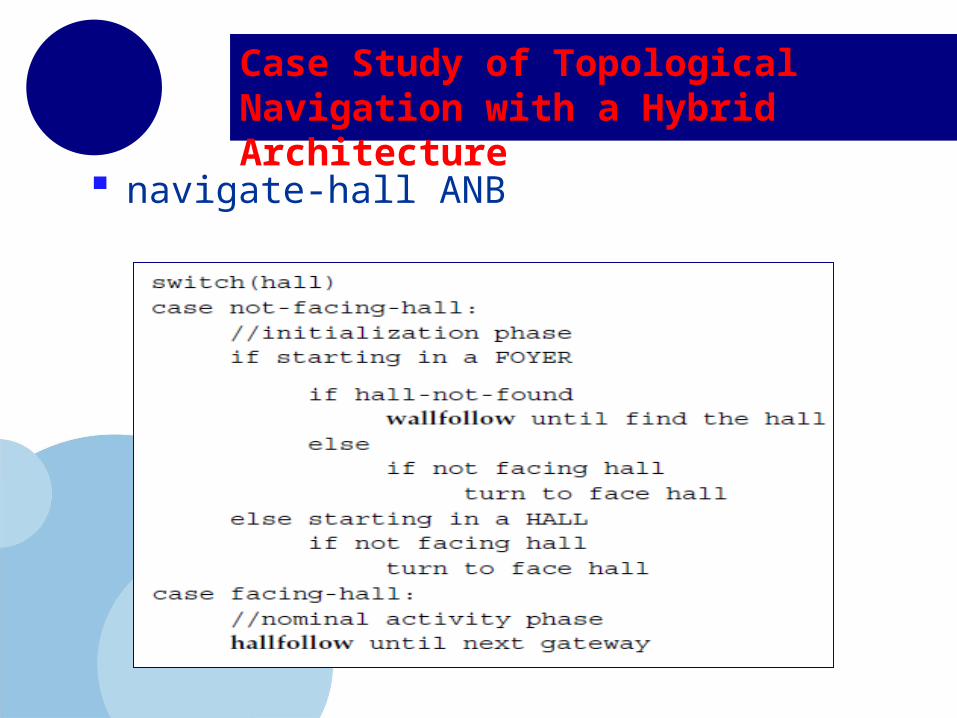
navigate-hall ANB

Case Study of Topological Navigation with a Hybrid Architecture
navigate-foyer ANB
Case Study of Topological Navigation with a Hybrid Architecture
• Lessons learned critical to build the abstract navigation behaviors
out of robust primitives (biggest problem is quality of the primitive
behaviors)contention for sensing resourcemetric distance problem impact of obstacles
Summary
• Landmarks simplify the ‘Where am I?’ problem
• Gateways special landmarks which reflect a potencial for the robot to
change directions
• navigation methods relational
distinctive places(nodes), local control strategies(lcs)
associative viewframe