title of the paper - unicas.itwebuser.unicas.it/cigola/pub/articoli/11_venezia.pdf · samuel gomes...
TRANSCRIPT

IIIMMMPPPrrroooVVVeee 222000111111 International Conference on Innovative Methods in Product Design
PPPrrroooccceeeeeedddiiinnngggsss
June 15th – 17th, 2011 Microsoft
Proceedings of IMProVe 2011
International Conference on
Innovative Methods in Product Design
San Servolo, Venice (Italy), June 15th – 17th, 2011
Scientific Associations:
ADM
INGEGRAF
Scientific Partners
AIP Primeca
IJIDeM
Conference Organization:
Daur - Università degli Studi di Padova
Patronages:
Università degli Studi di Padova
Facoltà di Ingegneria – Univ. Padova
Dipartimento di Architettura, Urbanistica e Rilevamento (DAUR) – Univ. Padova
© Copyright 2011
LIBRERIA CORTINA - Padova
ISBN 978-887784-328-9

i
IMProVe 2011 International Conference originates as the 5th Joint Conference of ADM (the Italian Associazione Nazionale Disegno di Macchine) and INGEGRAF (Asociación Española de Ingeniería Gráfica) and has been organized by the Design Tools and Methods in Industrial Engineering Lab. and the Drafting and Representation Lab., both belonging to the DAUR Dept. of University of Padova. From this edition, the Conference is also supported by A.I.P. PRIMECA (Ateliers Inter-établissements de Productique - Pôles de Ressources Informatiques pour la MECAnique) and IJIDeM (International Journal on Interactive Design and Manufacturing). This event has been proposed as a significant opportunity for discussing on product innovation issues from interdisciplinary point of views, to promote new workgroups and international networks in both engineering and architecture areas. As can be recognized by these proceedings, IMProVe 2011 has proven to be a forum of experts in engineering and architecture design from academia and industry, committed to share the different experiences, skills and ideas and to, jointly, identify new working hypothesis for the design of innovative products. The quality of the contributions was assured by a double blind review under the supervision of the Scientific Committee, as explained hereafter. I want to personally thank every member of the Scientific Committee and of the Reviewer Committee for the strong commitment and expertise demonstrated in this sensitive and very important task. Finally, I hope that this event could be one step towards a stronger and fruitful cooperation among ADM, INGEGRAF and AIP-PRIMECA associations, and also open new links with the innovative experiences in the fields of industrial design and architecture.
Gianmaria Concheri
IMProVe 2011 Chair
iii
IMProVe 2011 Scientific Committee note
The IMProVE 2011 Conference has reached a quite large audience of researchers interested to its topics, and 223 submission have been gathered by the OpenConf CMS, mainly from Europe. The review process has been possible with the work of the Scientific Committee, to which other 43 colleagues, mainly Italian and Spanish, have given their cooperation to guarantee at least two assessments per paper. Each reviewer has assessed 5 papers (average value) with a variance of ±3 papers. The double blind review process has selected 156 papers (70%), that have been subdivided between 98 for oral presentation (63%) and 58 for the poster session (37%). Accepted for oral presentation were the papers that reached a score greater than 4/6 (being 6 the greatest value used by the CSM). The paper assessed by a score lower than 4/6 was selected for poster session, even if in some (few) cases the improvement received by the paper, on the basis of reviewer comments, brought it up to oral presentation. Fortunately in few cases (lower than 10) was necessary to assign the assessment to a third reviewer, and this allowed the Scientific Committee to solve the conflict emerged. The papers with scores lower than 2/6 were rejected by S.C. or withdrawn by the authors. Submitted abstracts: 223 Accepted papers: 156 Papers rejected or withdrawn after the revision process: 67 Accepted papers origin: - Argentina 1 - China 1 - Colombia 1 - France 13 - Hong Kong 2 - India 1 - USA 1 - Italy 82 - Poland 1 - Spain 61 - Tunisia 2 (The above list cites only the corresponding Authors. The Author nationalities include more countries e.g. UK, NZ, etc.). Number of reviewers: 82: - Italy 50 - Spain 18 - France 12 - UK 1 - USA 1

iv
On behalf of the Scientific Committee, I would like to thank all people who spent part of their time to give a real improvement to the papers that will be presented at the Conference. A further step will remain to do. During oral sessions the quality and the interest of the presentations will be also assessed. On the basis of this latter and the previous scores, a very reduced number of papers will be selected by Scientific Committee for publication on the Int. J. on Interactive Design and Manufacturing. Good luck and thanks again
Sergio Rizzuti
Scientific Committee Coordinator

v
IMProve 2011 Scientific Commitee
Sergio Rizzuti Università della Calabria Antonio Lanzotti Università di Napoli M. Luisa Martinez Muneta Universidad Politecnica De Madrid Francisco Hernandez Abad Universidad de Cataluña Patrick Martin Arts et Métiers ParisTech Xavier Fischer ESTIA Fernando Aguilar Torres Universidad de Almería Pedro Alvarez Peñin Universidad de Oviedo Angelo Oreste Andrisano Università di Modena e Reggio Emilia Camillo Bandera Università di Udine Antonio Bello García Universidad de Oviedo Alain Bernard Ecole Centrale de Nantes Jean-François Boujut Institut National Polytechnique de
Grenoble Fernando Brusola Simón Universidad Politécnica de Valencia Emmanuel Caillaud Université de Strasbourg Danilo Cambiaghi Università di Brescia R.Ian Campbell Loughborough University Vito Cardone Università di Salerno Gianmaria Concheri Università di Padova Paolo Conti Università di Perugia Daniel Coutellier ENSIAME Carlos de San Antonio Gómez Universidad Politécnica de Madrid Paolo Di Stefano Università dell'Aquila Georges Dumont IRISA, ENS Cachan Benoit Eynard UTC Jesús Félez Mindán Universidad Politécnica de Madrid Andrea Giordano Università di Padova Samuel Gomes UTBM Horea Ilies University of Connecticut Kazem Kazerounian University of Connecticut Ferruccio Mandorli Università Politecnica delle Marche Francisco Montes Tubío Universidad de Cordoba Javier Munioguren Universidad del País Vasco Jean-Pierre Nadeau Arts et Métiers ParisTech

vi
Reimund Neugebauer Fraunhofer Institute for Machine Tools and Forming Technology IWU
Vincenzo Antonio Nigrelli Università di Palermo Didier Noterman INSA Lyon Cesar Otero Universidad de Cantabria Guillermo Peris Fajarnes Universidad Politécnica de Valencia Pascal Ray IFMA José Ignacio Rojas Sola Universidad de Jaén José Miguel Sánchez Sola Universidad de Cádiz Felix Sanz Universidad de la Rioja Eloy Sentana Cremades Universidad de Alicante Denis Teissandier Université Bordeaux 1 Serge Tichkiewitch Institut National Polytechnique de
Grenoble Philippe Véron Arts et Métiers ParisTech

vii
IMProve 2011 Reviewer Committee
Fernando J. Aguilar Pedro Ignacio Álvarez Peñín Rita Ambu Angelo O. Andrisano Camillo Bandera Sandro Barone Antonio Bello García Luisa Bifulco Elvio Bonisoli Fabio Bruno Fernando Brusola Emmanuel Caillaud Danilo Cambiaghi Ian Campbell Nicola Cappetti Vito Cardone Antonio Carretero Alessandro Ceruti Gianmaria Concheri Paolo Conti Daniel Coutellier Giuseppe d'Acunto Luigi De Napoli Agostino De Rosa Luca Di Angelo Paolo Di Stefano Georges Dumont Larisa Dunai Benoit Eynard Jesus Felez Stefano Filippi Xavier Fischer Salvatore Gerbino Michele Germani Andrea Giordano Samuel Gomes
Lapo Governi Horea Ilies Antonio Lanzotti Francesco Leali Alfredo Liverani Ferruccio Mandorli Patrick Martin Massimo Martorelli Roberto Meneghello Maura Mengoni Francisco Montes Tubío Sandro Moos Anna Morabito Barbara Motyl M. Luisa Martinez Muneta Javier Muniozguren Maurizio Muzzupappa Alessandro Naddeo Vincenzo Nigrelli Massimo Oliveri Cesar Otero Lia Maria Papa Stanislao Patalano Marcello Pellicciari Guillermo Peris Fajarnes Armando V. Razionale Sergio Rizzuti José Ignacio Rojas Sola Gregorio Romero Francesco Rosa Edoardo Rovida Rossella Salerno Carlos de San Antonio Gómez José Miguel Sánchez Sola Felix Sanz Gianpaolo Savio

viii
Eloy Sentana Denis Teissandier Stefano Tornincasa Alberto Vergnano Philippe Veron Enrico Vezzetti Roberto Viganò

ix
IMProve 2011 Local Organizing Committee
Gianmaria Concheri Andrea Giordano Roberto Meneghello Gianpaolo Savio Andrea Cerardi Matteo Turchetto Massimiliano Caneri
DAUR - Dip. Architettura, Urbanistica e Rilevamento
Università di Padova, Italy
1 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
CONTENTS
KEYNOTE SPEAKERS 11
INDUSTRIAL DESIGN AND ERGONOMICS 13
Design Semantics: Even hybrid Motorcycles need to make noise 14
Tracing the Evolution of Automobile design: Factors influencing the
development of aesthetics in automobiles from 1885 to the present 14
Application of graphic expression in the design of “New Rolling System for
Horizontal Blinds” applied to doors 15
Ergonomic design and analysis of a post in a stall 16
Evaluation of the Experiential Levels of CPGs (Consumer Packaged Goods)
using 3D Modelling 17
Office furniture design for wheelchair user 17
New comfort evaluation criteria: application on movie-theatre design 18
Synthetic 19
Validation of a new index for seat comfort assessment based on objective
and subjective measurements 20
VIRTUAL REALITY AND INTERACTIVE DESIGN 23
Virtual acoustic environment interface for sound source localization training 24
Augmented Reality integration in Product Development 24
A method for systematic usability evaluation of interactive product
interfaces 25
Dynamic Splines for interactive simulation of elastic beams in Augmented
Reality 26
A product innovation method based on the synergy between TRIZ and
Interaction Design 27
Mixed prototyping environment with different video tracking techniques 28

2 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
Augmented Reality: an innovative alternative for the collaborative design on
construction’s projects 28
KNOWLEDGE BASED ENGINEERING AND PRODUCT DATA EXCHANGE AND
MANAGEMENT 31
Digital document management in the conceptual design process of product 32
Towards a “high productive design methodology” dedicated to modular
product design using a Knowledge Configuration approach 33
Vertical metadata in learning objects to recovery the industrial historical
heritage 34
A proposal to incorporate the Value Analysis/Value Engineering techniques
into a PLM system 35
LeanCost: knowledge-based tool for early product cost estimation 35
KBE approaches in preliminary design: a case study 36
GEOMETRIC MODELLING AND ANALYSIS 39
Parametric Modeling of Free-Form Surfaces for Progressive Addition Lens 40
A fast algorithm for manifold reconstruction of surfaces 41
Modeling methods in parametric design. Order matrix 42
A parametric associative modelling of aeronautical structural concepts
under C0, C1 or C2 continuity constraints 43
Geometric modelling of metallic foams 44
Development of an algorithm for a triangular approach to the sphere based
on the Platonic solids using MATLAB scripts. 45
Shape optimization of smooth surfaces with arbitrary topology 46
Characteristics of conic segments in Bézier form 46
Constrained fitting of B-Spline curves based on the Force Density Method 47
INTEGRATED PRODUCT AND PROCESS DESIGN 49
Influence of geometrical characteristics on eco-designed products 50
A computer tool to extract feasible assembly sequences from a product CAD
model, in automated way 51
3 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
Adaptation and implementation of a process of innovation and design within
a SME 52
Design for recycling problematic: application to composite parts 52
A novel tool for pneumatic spindle design 53
A novel method for sensitivity analysis and characterization in integrated
engineering design 54
Analysis tool of the management of integrated systems of implementation in
the design of systems of industrial organization in Smes industrial devoted
to mounts and electrical installations 55
Shape Similarity: Methods and Industrial Applications 56
A survey on systematic innovation strategies for product design and
development 57
A web-based Platform to design Energy Efficient Electric Motors 58
Integrated Design of Robotic Workcells for High Quality Machining 59
Understanding a particular semantic dimension: how selecting the products
for evaluation tests? 60
Integrated product and process design for microproduct development via
microforming 61
A Procedure for Early Environmental Assessment of Industrial Products 62
Solving an engineering problem in shipbuilding by Triz method 62
IMAGE PROCESSING AND ANALYSIS 65
Image Processing and Tactile Methodologies of a Navigation System for
Visually Impaired People 66
Automated dyeing of free-form leather patch edges: a Machine Vision based
system 66
Automatic image-based car profile character line recognition 67
The detection of petroglyphs through digital image processing. The
particular case of the stone inside the chapel of Saint Bartolomé (Lugo-
Spain) 68
Automatic alignment of multi-view range maps by optical stereo-tracking 69

4 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
Automatic detection and tracking of planar markers in a stereo-vision
system 70
Fast Correction of Tiled Display Systems on Planar Surfaces 71
Evolution of the Design and Decoration Processes of Ceramic Tiles 71
REVERSE ENGINEERING 73
Automation of the finishing process of steel yacht hulls based on optical
scanning 74
Construction of a geometric reference model for automatic non-ideality
evaluation of an acquired high-density workpiece 75
On the performance of several stereo calibration methods and models 76
Computation of optimal acquisition viewpoints for the 3D optical inspection
of mechanical components 77
Experimental analysis for error compensation of laser scanner data 78
New CAD/CAM process: an elaboration of the geometrical matrices of
rosette 79
SIMULATION AND EXPERIMENTAL APPROACHES 81
Numerical fatigue life evaluation of an innovative internal combustion
engine shaft 82
Development of a test machine for the tappet characterization 82
An investigation on the validity of 3D clothing simulation for garment fit
evaluation 83
Simulating airport operations in a synthetic environment 84
Design Of Simulation Experiments method for Injection Molding process
optimization 85
Virtual prototype development for comfort assessment of occupational
footwear sole 86
GEOMETRIC PRODUCT SPECIFICATION AND TOLERANCING 89
An Extracting Points Strategy for Flatness Measurement on Components by
means of CMM 91
Integration of tolerances in the mechanical product process 91

5 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
The geometrical specification in concurrent product design 92
Influence of form errors in plane surfaces assemblies 93
Algorithm to calculate the Minkowski sums of 3-polytopes dedicated to
tolerance analysis 93
Experimental evaluation of convex difference surface for planar joint study 94
Assembly analysis for spot-welded compliant assembly: Guidelines for
formalizing the plasticity contribution to tolerance analysis 95
Form errors estimation in free-form 2D and 3D geometries 96
DESIGN METHODS AND APPLICATIONS 97
Redesign of an auto-levelling base for submarine seismic sensor 98
Measuring dynamical parameters for spherical objects: Application for
sports training 99
Structural and Topological Optimization in Robot Design 99
Preliminary Design of a New Bridge System for a Modern Mine Hunter
Vessel 100
Study of the impact of a bomb on the side of a vessel and validation by
comparing the original sheet with numerical simulation 101
Mathematical modelling and simulation of an adjustable-stiffness spring 102
Design of physical prototypes to analyze aerodynamic effects 102
Design optimization based on eco-design and mechanical analysis 103
Development of a trade-off function for robust optimization problems in
design engineering 104
Design of a device for stability control system, to decouple loads, for an
optimised maintenance in hostile environment 105
Design optimization: management of large solution spaces and
optimization algorithm selection 106
A CAD toolbox for Composite Materials Modelling and Drawing 107
Improving Helicopter Flight Simulation with Rotor Vibrations 107
Optimization by Particle Swarm Algorithms of an UAV performed by Hot
Wire Cutting Techniques 108

6 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
Decision support system to design autonomous microsystems 109
3D CAD and multi-domain simulation integration for Energy Scavenger
design 110
ENGINEERING METHODS IN MEDICINE 111
An integrated methodology for functional simulation of dental prosthesis 112
Design of a new tibial intramedullary nail 113
A Novel Method of Removing Artifacts in Dental CT Images 113
3D facial symmetry evaluation from high-density scanned data 114
Methods and tools dedicated to shoes customization for people with
diabetes 115
Structural analysis of a posterior stability total knee joint replacement 116
Studying the influence of thread features in osseo-integrated implants 117
Analysis and design of a thrombectomy device by using simulation
techniques 118
Innovative design of customized surgical devices for mandibular
rehabilitation 119
Analysis of TMJ replacement using a finite element model 120
A CA system for RGP contact lens design 121
Shape modeling and analysis of a human eye based on individual
experimental data 121
REPRESENTATION TECHNIQUES 123
Main axonometric system related views as tilt of the coordinate planes 124
Parameter Combinatorial Diagram. Application to the study and analysis of
Hydrological Simulation Models. 124
Heaven in the stone 125
The CGI production in San Francesco’s church in Padova 126
TEACHING PRODUCT DESIGN AND DRAWING HISTORY 127
“Let's take a look to the project” 128
Parametric Cad in the teaching of drawing for Mechanical Engineer 128

7 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
From Research to Sustainable Innovation and Entrepreneurship: Which
Competences? 129
Safety signage made easy using parametric CAD-based software 130
Engineering designer curricula and creativity development 131
Graphical formulary of statically determinate and indeterminate beams 131
Leonardo’s Civil Bridges 132
Improving a CAD tool to simplify the design process of electrical schematics
oriented to industrial-machine control 133
CAD, BIM, GIS and other tricks of the computer science in the education of
the Building Engineer 134
Teaching Methods for Concept Design and Prototyping 135
Designing an interactive web manager applied to the development of spatial
abilities 136
Evolution of graphic representation applied to chemical engineering 137
Use of an Open-Source PLM solution to improve teamwork performance in
product design courses 138
Teaching the rules of the space: the Olympic Theater in Sabbioneta 139
SURVEYING, MAPPING AND GIS TECHNIQUES 141
Virtual reconstruction of the door of the Apostles of the Insigne Collegiate
Church of Santa María of Gandia Spain 142
Landform of Alicante province by using GIS 142
Survey and graphic interpretation of underground cellars 143
Analysis of the geometry of nature. Particular case of traditional
underground cellars 145
The artesonado of the hunters' lounge. Palace of the infantado of
guadalajara 146
Architectural survey and Robotics: new frontiers in study, preservation and
restoration of historical sites 147
Hydrologic moment of a watershed area 148

8 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
A GIS approach to monitor territorial transformations: digital assessment of
the cycle paths in Paestum 148
BAECULA battle Geographic Information System 149
Methodology for the metric restoration of the historical cartography
applied to Francisco Coello´s cartografic series of the Royal Site of Aranjuez 150
Determination of orthometric heights from LiDAR data 151
Geometric processing of GeoEye-1 satellite imagery for coastal mapping
applications 152
Tomas Lopez’s Geographic Atlas of Spain (1787) and its Hydrographic
Network: GIS analysis of the “Reyno de Jaen” 153
Improvements in the determination of extrapolated shorelines using
Elevation Gradient Trend Propagation method. 153
Robust surface matching as a rapid technique for terrain change detection 154
Portraits of lost and possible cities 156
Registration and 3D virtual reconstruction of the old Carmen's Spa Park
(Málaga) 157
Elaboration of a GIS for the management of the new building of the
engineering’s school 157
Economic valuation Hornachuelos Natural Park (Córdoba, Spain), supported
by Geographic Information Techniques 158
Simulation and virtual approach: from architecture to landscape 159
Methodology for highways network infrastructures´ design in the landscape 160
INNOVATIVE METHODS IN ARCHITECTURAL DESIGN 163
Descriptive models and knowledge management. Experiences and
Perspective 164
Walking through history. A visionary project for the third-millenium perugia 164
From Wayfinding to Waysharing: interaction/information/interactivity for
existing hospitals 166
Design time and time architecture 167
9 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
New materiality: digital fabrication and open form Notes on the
Arbitrariness of Architectural Form and Parametric Design. 167
New key factors in drawing up a building 168
Architecture = Design? The increasingly strong link between 3D modeling
and automated manufacturing 169
Wayfinding on public spaces: the UPV case 170
The drawings design realized by parametric computer systems 171
Bioclimatic passive designs rural buildings 172
Digital modelling and representations: Design and works by Riccardo
Morandi and Sergio Musumeci 173
Computer modeling to document architecture and for use in design
prefiguration 173
Computer modelling based on integrated survey techniques and to
document architecture 174
Digital Modeling in architectural analysis for training engineers to building
design 175
The digital model in the documentation of architectural elements 176
List of Authors 177

141 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
SURVEYING, MAPPING AND GIS TECHNIQUES
Proceedings of the IMProVe 2011
International conference on Innovative Methods in Product Design
June 15th – 17
th, 2011, Venice, Italy
Architectural survey and Robotics: new frontiers in study, preservation and restoration of historical sites
M.Cigola (a)
(a) Laboratorio di Documentazione, Analisi, Rilievo dell’Architettura e del Territorio, DiMSAT, Università di Cassino,
Article Information
Keywords: Architecture, Restoration, Survey, Robotics
Corresponding author: Michela Cigola Tel.: +39 0776 2993609 Fax.: +39 0776 2994305 e-mail: [email protected] Address: Via G. Di Biasio, 43. 03043 Cassino, Italia
Abstract
In this work a study of feasibility is illustrated to design and build a mobile robot for inspection and analysis of historical sites of architectonic interest. This novel application for robotic systems can be considered of great interest because nowadays the need of more and more accurate and efficient survey activity requires enhancement and even development of procedures with more reliable, innovative, and advanced characteristics. Within this expectation robots and robotic systems seem to be suitable solutions even with the purposes of: operating in environments that cannot be reached by human operators. The study of feasibility concerns with the analysis and simulation of a robotic system that can be used for operating in historical sites. Basic features of such mobile robots, either legged or wheeled, are well known, but specific requirements should be considered for the proposed applications in archaeological/architectural sites, which can be considered as a novelty in the field of Robotics. Basic features of the proposed robotic system can be summarized as follows: the robot should be able to move inside the archaeological and/or architectural sites by carrying surveying devices and by avoiding damage of the surface and other parts of the site. In Cassino preliminary design considerations have been developed and a suitable simulation has been carried out in order to test a designed robotic system acting on a simulated pavement, for several operating conditions. The simulation process is of basic importance, since it is not possible to test in advance the robot on site and there are not precise information about the preservation of pavement under-study. A simulation has been carried out with different conditions and it has been also useful to test the operation of the design of a robotic system with hexapod structure. At this moment, the research in Cassino is in a final phase concerning with first applications of a robot prototype. However, a continuous review of the design work is undergoing to formulate a general problem in which the design of a suitable low-cost easy-operation robotic system is properly defined also for not expert users in the field of robotics. The prototype activity is performed with the aim to design a specific test-bed through which verifies the identified design requirements and feasible solutions even for the operation of the system.
1 Introduction1
The work being presented is the result of collaboration between the DART (Laboratory for the Documentation, Analysis & Surveying of Land and Architecture) and the LARM (Robotics and Mechatronics Laboratory). Despite their seemingly diverse spheres of research, these two institutes have a long history of opportunities to discuss and share their knowledge, and to research issues on which to base practical, fruitful collaborations
2.
Our aim is to study characteristics and issues concerning the analysis and conservation of built heritage
1 A first version of the paper, by M. Cigola and M. Ceccarelli has been presented to XI International Seminar Forum Unesco - University and Heritage, Florence 11-16 September 2006. 2 The research team is composed by investigators from DART
Laboratory for the Documentation, Analysis & Surveying of Land and Architecture, and LARM Laboratory of Robotics and Mechatronics. In particular at DART the following are involved: Michela Cigola, architect with expertise in Restoration of Monuments, full professor ICAR/17, director of DART; Assunta Pelliccio, architect, assistant professor. At LARM the following are involved: Marco Ceccarelli, engineer, full professor ING-IND/13, director of LARM, Giuseppe Carbone, engineer, assistant professor.
from the innovative standpoint of robotic systems. The design requirements and special features of the operations of an extremely wide variety of robotised systems have been fully outlined, and are now entirely familiar. However, in a specific application related to a topic such as built heritage, apparently so far removed from the more general fields of robotics and mechatronics, there are not many precedents.
The sample study presented here, i.e. the pre-Cosmatesque pavement of the basilica of Montecassino
3,
is a good example not only of the flexibility of the field of mechanics, but also of the possibilities for interaction with architecture in general, and the field of surveying in particular. A study of this type focuses specifically on applying robotised systems to the research and surveying of historic pavements, although the broader aim is to study and explore robotic systems and automated procedures to develop the work and the results, not only
3 Cosmatesque style started at the beginning of XII-th century
and it was used mainly in Rome and Lazio region up to the end of XIV-th century. Its main characteristics can be considered the assembling aspect with square or rectangular panels that are composed of marbles parts and porphyry disks. The first Cosmatesque pavement is that one in the Basilica of Montecassino Abbey that was inspired by oriental sources and ancient Roman [1].

Cigola M. Architectural survey and Robotics
June 15th – 17th, 2011, Venice, Italy Proceedings of the IMProVe 2011
during the analysis stage but also for the protection and conservation of historical buildings.
The use of robots in difficult situations is becoming increasingly common, as in the case of inspections of the innermost layers of atomic plants, space voyages and explorations of inaccessible areas of land such as the craters of volcanoes. There is good reason to suppose that a new, original example could be the study and protection of historical buildings by using self-propelled robots to carry out extremely complex tasks on various types of surface, under the supervision of a human operator.
Our idea is to develop a link between robotics and architecture, with a mechanical design that has been specially developed for architectural analysis and restoration, in an extremely innovative application in the field of robotics. It is an attempt to make a robot perform many of the operations required in architectural surveying via automations which can improve procedures and results in terms of speed, accuracy and execution.
2 Architectural pavement surveys
Surveying is intended to mean a complex series of operations such as the collection, evaluation and interpretation of all possible information, not only concerning the geometrical and spatial elements of the building, but also the construction, structural and historical data.
Surveying is used most often in the fields of historical and critical analysis of architecture and restoration. There is no doubt that in order to carry out an accurate historical study of a building, accurate measurements are essential. The survey of a building is not a document on which we can work in hindsight, but it is an integral part of the process of gathering historical and critical knowledge.
A survey carried out with a view to possible restoration works must give a global picture of the building in question, which is exhaustive in terms of dimensional, structural and construction details. It must provide a snapshot of the building's state of health, its conditions of decay and static conditions. This means it must perform a historical and technical diagnosis, helping to clarify the design intentions, including the sizing and measurement aspects, orienting historical research through illustrative, bibliographical and archive sources.
The survey issues concerning protection therefore require measurements taken accurately, and graphic renderings that pinpoint the characteristics of the building and all its peculiarities, often using scales of representation larger than those normally used in the preliminary survey [2].
As far as the methods and techniques for documenting Cosmatesque pavements are concerned, we must point out that surveys of works of this type require special measurement and representation procedures, with an emphasis on the type of material and the size of the pieces used, the level and type of surface finishing, the thickness and treatment of the joints and laying surface.
Further, if the survey is carried out well, each part of the pavement should be surveyed individually and also in relation to the surface as a whole, with special emphasis on any elements which are repeated or form a series. This is because any anomalies found in these repetitions sometimes characterise the laying of the pavement.
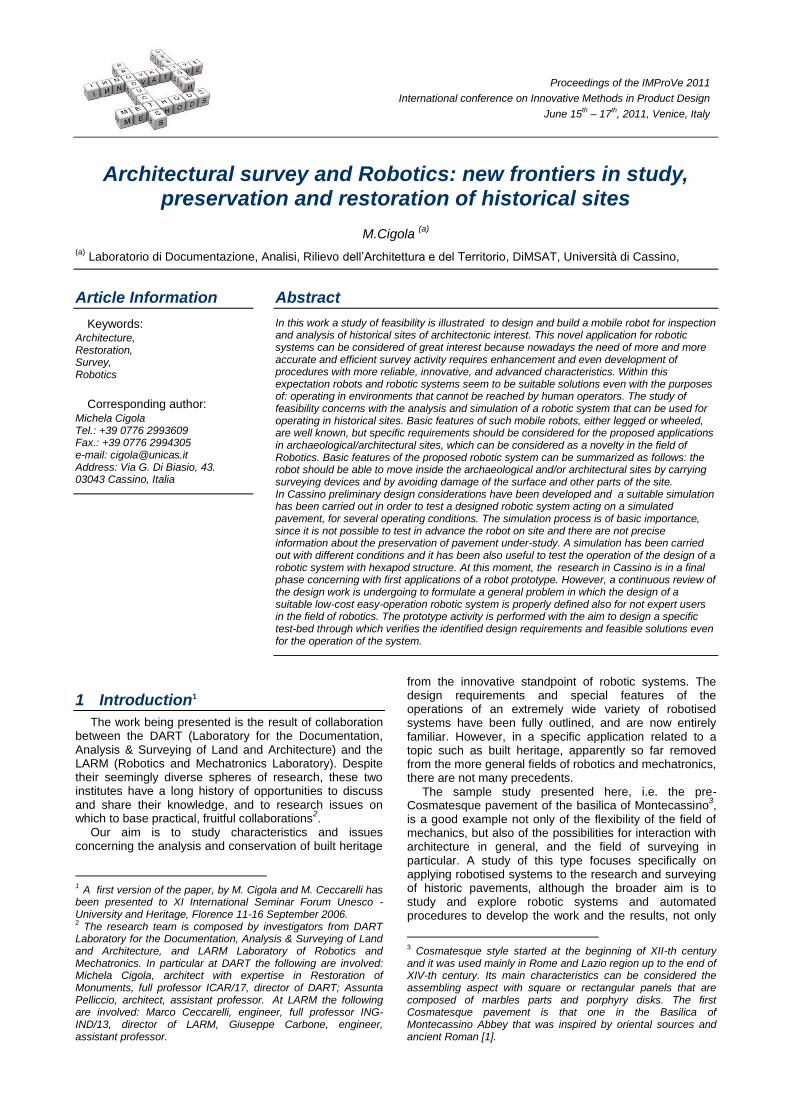
Also, great care must be taken when measuring the irregularities of the surface as a whole (sudden changes in level, hollows, etc.) and identifying any gaps or additions made over time (fig. 1).
The overall process of measurement and the resulting graphic rendering of a Cosmatesque mosaic pavement can therefore be summarised as a series of operations, each of which must lead to a different scale of representation: survey of the entire laying of the pavement, represented as part of its architectural environment (1:100 - 1:50); a survey of its main elements (1:50 - 1:10); a detailed survey of the geometrical patterns used in the inserts which make up the largest percentage of the mosaic pavement (1:10 – 1:1) [3].
In the field of surveying historical pavements, our idea is to test this interaction between robotics and architecture, developed at the University of Cassino, in a in a project specially designed for architectural analysis and restoration, in an extremely innovative application in the field of robotics. It is an attempt to make a robot perform many of the operations related to the analysis and monitoring of historic buildings via automations which can improve procedures and results in terms of speed, accuracy and execution. To obtain this result, we need a robot with the ability to move in various directions, with “vision capacity” as it is known in the world of robotics, and obviously a high degree of versatility in order to adapt to the various sites in which it can be used.
3 A case study: the pre-cosmatesque pavement of Montecassino
The specific case study is the pre-Cosmatesque pavement of the basilica at the abbey of Montecassino, with the aim of testing the possibilities for applying robotic systems and automated procedures to architectural surveying.
This pavement, (there is good reason to believe it is the first example of a Cosmatesque pavement in Italy), was built by Byzantine craftsmen on the orders of the abbot Desiderius (who later became Pope Victor III) between 1066 and 1071. During the 18th century, it was replaced by another pavement with marble inlays, and for a long time was thought to have been lost.
After the monastery was totally destroyed during the Second World War, a large part of the pavement dating from Desiderius’ time, thought to have been lost, was rediscovered among the rubble. It was photographed and carefully surveyed before being consigned to oblivion once more in a cavity under the new basilica, rebuilt between 1948 and 1952 [4].
Fig.2 shows the survey of the entire pavement as it was found immediately after the basilica was destroyed in the 18th century. In particular, fig. 3, taken during the excavation and surveys carried out before rebuilding works began, clearly shows the difference in height of about a metre between the Desiderian pavement and the current surface. For any inspection or other work to the Cosmatesque mosaic, there is only a very low cavity, which is unlit and airless and therefore unsuitable for human intervention.
This is why, since the new basilica was rebuilt, the pavement has never been inspected in order to study its state of repair, or to make a stylistic analysis of the decoration.
This case study demonstrates the impossibility of using human operators, and is therefore well-suited to the experimentation of robots in this branch of studying and conservation of architectural heritage in general, and historical pavements in particular.
The interaction between the staff at DART, experts in architectural surveying, provides the main elements of the

Cigola M. Architectural survey and Robotics
June 15th – 17th, 2011, Venice, Italy Proceedings of the IMProVe 2011
operations that the planned robot will have to perform when working inside the Cosmatesque pavement of Montecassino. These indications will be developed and made possible by the team at LARM, experts in robotised systems.
These operations can be summarised as follows: firstly, the robot will have to be able to move around inside the zone in question, carrying filming devices in order to carry out an initial study of the pavement: cameras and video cameras. These filming devices will then have to be replaced by more sophisticated instruments which can provide more precise information, such as thermo graphic machines and laser measurers.
At the same time, since the pavement of the cavity is extremely uneven, due to the presence of architectural remains from the same period and even pre-dating the pavement, the robot will not only have to move around correctly, but also ensure that the filming devices remain parallel to the pavement.
Apart from these factors, since the knowledge of the pavement in its current state is extremely important for the purposes of analysis and conservation, as it moves forward the robot must be able to memorise and transmit to an external unit any changes in the length of its legs along the way, to provide, in real time, the changes in the x-coordinate that will also give a section of the pavement as well as the route [5].
In order to begin testing the validity of the proposed ideas, experiments are being conducted in a virtual environment, with a simulation of the cavity and the pavement. Both can be recreated since photos and precise surveys were carried out during reconstruction of the monastery (fig. 4).
This type of evaluation, carried out in a three-dimensional virtual environment recreated on the computer, is proving to be extremely useful as it reduces not only the time, but also the cost of the design stage, since it is possible to assess and test the model in depth, right from the early design phase, working within an environment which provides an excellent simulation of the area in which the robot will be working. It allows modifications, fine-tuning and changes that would be expensive and difficult even if carried out only on the prototype.
4 Preliminary prototypes and laboratory tests
A historical pavement can be seen as a difficult terrain that includes features that could cause robot entrapment or loss of stability. Indeed, the architecture analysis for restoration of ancient pavements should be performed by a robotic system that is capable to overcome obstacles and move easily on flat surfaces with high stability.
The task can be recognized in the acquisition of measurements along the ancient pavement. Basic survey measurements that can be carried out are based on panoramic images of the site, which can be taken by a camera installed on the robot, and local pavement slope through servo-inclinometers. These operation can require a mobile robot with an inertial system to locate the robot in a world fixed frame, and proximity sensors to avoid collisions.
A good robotic solution can be based on the use of anthropomorphic legs with wheels such as the one that is shown in fig. 5. In fact, one can use the wheels for fast movements on flat surfaces and the legs for walking in an
anthropomorphic manner to avoid or climb over obstacles and steps.
An hexapod robot is a feasible solution with a large platform for carrying equipment for inspection but operations of restoration. The hexapod robot has capability of keeping horizontal posture of the platform during the walking, as shown in the simulation of fig. 4. The number of legs is higher than three in order to guarantee stability. The use of six legs can be seen as a good compromise between flexibility and complexity of the system. In fact, hexapod robots have been already successfully used for example in space exploration, in-pipe inspection, mine detection, service robotics .
The robot’s six-leg structure was chosen by taking into account the considerable irregularities in the pavement, with holes of a size that make wheeled robotic vehicles unsuitable, as they are generally more suited to interaction with contact. For this purpose, an initial prototype of an articulated leg and foot has been built, created by means of an actuated wheel in order to control the force in contact with the ground, in order to limit the possibility of causing further damage to the pavement.
The robotic system was designed with six legs in order to allow movements that, if programmed and adjusted correctly, ensure that three legs will remain in contact with the ground at the same time, to give the required mechanical stability and precision needed to direct the body onto which the architectural survey devices are installed.
In particular, the design has been created to give remarkable availability of space on the body of the six-leg robot, even on the surface facing the ground. Another special feature being dealt with at the prototype stage concerns the management and planning of strategies for moving the robot. With an adequate and relatively simple control system, this can give agility and flexibility of action, even to those without great experience in robotics [6].
5 Conclusions
We are currently finalising the design and the construction of the robot (fig. 6), which is being developed by the two laboratories LARM and DART, and are constantly reviewing the requirements deriving from the architectural application and inspections carried out in the field of mechanics and mechatronics.
Our aim is to test the possibilities of designing robots and/or robotic systems which are specifically dedicated to the field of Built Heritage, and to historical buildings in particular, and therefore to work in a completely new field for this kind of application.
At the same time, we cannot ignore the objectives regarding the medieval pavement of Montecassino. This not only requires more detailed study to improve the knowledge of this type of work, as yet not widely studied, but there is also the aspect of studying the techniques of documentation, analysis, and therefore protection and conservation, of stone surfaces in general and in particular the pavement of the historic abbey at Montecassino, which lies hidden and unexplored beneath the current basilica.
Cigola M. Architectural survey and Robotics
June 15th – 17th, 2011, Venice, Italy Proceedings of the IMProVe 2011
Fig. 1 Rome, cosmatesque pavement of St. Crisogono (1146/1150)
Fig. 1 Montecassino, ancient pavement of basilica (1066/1071) beneath current in a survey of 1951-52 [7]
Fig. 2 Left side of the antique pavement before the reconstruction of the closed space in 1952 [8].
Fig. 3 A simulation example of operation of a hexapod robot on historical pavement of Montecassino.

Cigola M. Architectural survey and Robotics
June 15th – 17th, 2011, Venice, Italy Proceedings of the IMProVe 2011
Fig. 4 Built prototype of an anthropomorphic wheeled leg as developed at LARM,
Fig. 5 Prototype of robot developed at LARM,
6 References
[1] D. Glass, Studies on Cosmatesque Pavements, in British Archaeological Reports International Series, Vol. 82, Oxford, 1980. [2] M. Docci, D. Maestri, Manuale di Rilevamento architettonico e urbano, Roma-Bari 1994. [3] M. Cigola, Mosaici pavimentali cosmateschi: Segni, disegni e simboli, in Palladio, n.s. VI n. 11, june 1993; pp.
101-110. [4] B. D’Onorio, L'Abbazia di Montecassino, stato, religione, arte, Montecassino 1989. [5] M. Cigola, M. Ceccarelli, A Robot application for analysis, survey and conservation of historical architect-tures in Robotics and Automation in Construction, edited by C. Balaguer & M Abderrahin, I-Tech Educational and Publishing KG Vienna, 2008; Cap. 20, pp. 328-354. [6] G. Carbone, M. Suciu, M. Ceccarelli, D. Pisla, Design and Simulation of Cassino Hexapode Walking Machine, in International Journal of Mechanics and Contro, n. 10 2009; pp. 27-34. [7] A. Pantoni, Descrizione di Montecassino attraverso i secoli, in ”Benedictina” 19, Montecassino 1972, pp. 539-586. [8] A. Pantoni, A. Ferrua, E. Kirschbaum, C. Venanzi, III.L'esplorazione archeologica del sepolcro di s.Benedetto, in "Miscellanea Cassinese" n. 27, Montecassino 1951; pp. 69-9, TAV XVII.

Surveying, Mapping and GIS Techniques
147 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
Architectural survey and Robotics:
new frontiers in study, preservation
and restoration of historical sites
M. Cigola (a)
(a) Laboratorio di Documentazione, Analisi, Rilievo dell’Architettura e del Territorio, DiMSAT,
Università di Cassino
Abstract:
In this work a study of feasibility is illustrated to design and build a mobile robot for inspection and analysis of historical sites of architectonic interest. This novel application for robotic systems can be considered of great interest because nowadays the need of more and more accurate and efficient survey activity requires enhancement and even development of procedures with more reliable, innovative, and advanced characteristics. Within this expectation robots and robotic systems seem to be suitable solutions even with the purposes of: operating in environments that cannot be reached by human operators. The study of feasibility concerns with the analysis and simulation of a robotic system that can be used for operating in historical sites. Basic features of such mobile robots, either legged or wheeled, are well known, but specific requirements should be considered for the proposed applications in archaeological/architectural sites, which can be considered as a novelty in the field of Robotics. Basic features of the proposed robotic system can be summarized as follows: the robot should be able to move inside the archaeological and/or architectural sites by carrying surveying devices and by avoiding damage of the surface and other parts of the site. In Cassino preliminary design considerations have been developed and a suitable simulation has been carried out in order to test a designed robotic system acting on a simulated pavement, for several operating conditions. The simulation process is of basic importance, since it is not possible to test in advance the robot on site and there are not precise information about the preservation of pavement under-study. A simulation has been carried out with different conditions and it has been also useful to test the operation of the design of a robotic system with hexapod structure. At this moment, the research in Cassino is in a final phase concerning with first applications of a robot prototype. However, a continuous review of the design work is undergoing to formulate a general problem in which the design of a suitable low-cost easy-operation robotic system is properly defined also for not expert users in the field of robotics. The prototype activity is performed with the aim to design a specific test-bed through which verifies the identified design requirements and feasible solutions even for the operation of the system.
Keywords: Architecture, Restoration, Survey, Robotics
Corresponding Author: Michela Cigola
Tel.: +39 0776 2993609
Fax.: +39 0776 2994305

177 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
List of Authors
A. A. Ammar ................................... 52 A. Adán-Oliver.............................. 145 A. Álvarez ..................................... 101 A. Angilica ...................................... 28 A. Ballu ........................................... 94 A. Baschiera ................................... 36 A. Bass ............................................ 14 A. Benamara ............................ 50; 91 A. Carofalo ..................................... 44 A. Cerardi ............................... 96; 112 A. Ceruti ......................... 56; 107; 108 A. Collignan .................................. 106 A. Donoso .................................... 102 A. E. Morabito .................... 43; 44; 75 A. E. Uva ................................... 24; 67 A. Fernández ................................ 152 A. Fernández Sora ............ 17; 55; 133 A. Finneran .................................. 130 A. G. F. Gibb ................................. 130 A. G. González Rodríguez ............. 102 A. Giordano .................................. 128 A. González Rodríguez ................. 102 A. L. Romera Zarza ....................... 132 A. Lanzotti ................................ 20; 86 A. Liverani .............................. 56; 107 A. López ............................... 151; 153 A. López-Tercero .......................... 146 A. M. García Lorca ....................... 152 A. M. Manferdini ........................... 19 A. M. Trallero Sanz ....................... 146 A. Mancuso .................................. 113 A. Manuello Bertetto ................... 105 A. Marín Palma ............................ 146 A. Mozas ...................................... 153 A. Naddeo ...................................... 18 A. Nocerino .................................... 62 A. O. Andrisano .................. 54; 59; 85
A. P. Merina ......................... 142; 160 A. Pagliano ................................... 125 A. Paoli ..................................... 69; 74 A. Pellegrino .................................. 62 A. Ramos ...................................... 120 A. Riel........................................... 129 A. Ristevich .................................. 128 A. Robert ....................................... 33 A. Román ..................................... 136 A. Serrano Tierz ............................. 17 A. Spezzaneve .............................. 114 A. T. Mozas .................................. 151 A. V. Razionale ......................... 69; 74 A. Vanacore ................................... 20 A. Vergnano ....................... 54; 59; 85 A. Viciana ..................................... 152 A. Zompì ........................................ 95 B. Álvarez ..................................... 101 B. Callejero Cornao ........................ 55 B. Defez ............................. 24; 71; 99 B. Jorda-Albiñana ........................ 170 B. Louhichi ..................................... 91 B. Messina ................................... 148 B. Motyl ......................................... 57 B. Polimeni .................................. 173 B. Ramos ...................................... 136 B. Vazquez ..................................... 68 B. Yannou ...................................... 50 C. Anido ....................................... 101 C. Bandera ..................................... 57 C. C. Perucho ....................... 142; 160 C. Cundari .................................... 174 C. D’Oria ........................................ 18 C. Falchi ....................................... 105 C. Favi ............................................ 58 C. García Hernández ............ 130; 133 C. L. Marcos ................................. 167

178 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
C. Melgosa ................................... 136 C. Monteleone ............................. 139 C. Porras Amores ......................... 143 C. Porras-Amores ......................... 145 C. Rocco ......................................... 62 C. San Antonio ............................. 150 C. San Antonio Gómez ................. 153 C. Vernier ....................................... 33 C. Zoido .......................................... 71 D. Barattin ...................................... 27 D. Blumenthal ................................ 60 D. Boddi ....................................... 100 D. Francia ......................... 56; 84; 107 D. Gutiérrez ................................... 16 D. Saba ........................................... 74 D. Scaravetti ................................... 52 D. Teissandier ................................ 93 D. Tumino .................................... 116 E. Aliouat ........................................ 60 E. Baños ....................................... 136 E. Bonisoli .................................... 110 E. García ....................................... 136 E. García Martínez ....................... 146 E. González .................................. 152 E. Lluna .......................................... 99 E. Lombardo ................................... 82 E. Manferdini ................................. 19 E. Marchis .................................... 159 E. Martínez Borrell ....................... 168 E. Molero ..................................... 157 E. Montiel .................................... 115 E. Pezzuti ........................................ 26 E. Rovida ...................................... 131 E. Sentana .............................. 15; 137 E. Vezzetti ...................................... 95 E.B. Blázquez .......................... 17; 157 F. Aguilar ...................................... 151 F. Belloni ...................................... 156 F. Bianconi ................................... 166 F. Bruno ................................... 28; 47 F. Brusola ....................................... 99 F. Brusola Simón ............................. 32
F. Chiementin .............................. 128 F. De Crescenzio ............ 78; 119; 135 F. Di Monaco ............................... 110 F. Gherardini .................................. 85 F. Giménez Alcaide ........................ 71 F. Hermosilla ................................ 157 F. I. Cosco ...................................... 28 F. J. Aguilar .................. 152; 153; 154 F. J. Castillo ............................ 17; 157 F. J. Espinach Orús ......................... 17 F. Julián Pérez ................................ 17 F. Leali ................................ 54; 59; 85 F. Lucchi ................................. 78; 135 F. Mandorli .................................... 77 F. Manzano Agugliaro .................. 153 F. Mozas Martínez ....................... 149 F. N. Gimena ................ 124; 131; 148 F. Patiño Barbeito .......................... 28 F. Patiño Cambeiro ........................ 28 F. Persiani .............................. 84; 108 F. Pini ............................................. 59 F. R. Mazarrón ............. 143; 145; 172 F. Rosa ......................................... 131 F. Villecco ...................................... 62 G. C. Cundari ................................ 173 G. Cacopardo ................................. 82 G. Caligiana .................... 56; 107; 108 G. Concheri ................ 36; 40; 96; 121 G. Curti ........................................ 173 G. de los Galanes ......................... 146 G. Defranco ........................... 79; 128 G. Fatuzzo ................................ 82; 99 G. Fernández San Elías ................ 132 G. García ...................................... 101 G. Lo Buglio.................................... 82 G. Mangano ................................... 98 G. Monno ................................ 24; 67 G. N. Massai................................. 134 G. Osorio-Gomez ........................... 51 G. Pearce ..................................... 118 G. Peris Fajarnés ........ 24; 32; 66; 142 G. Peris-Farjarnés .......................... 71
179 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
G. Romero .............................. 71; 118 G. Savio .................... 40; 96; 112; 121 G. Sequenzia ............................ 82; 99 G. Sergio ........................................ 82 G.Garzino ..................................... 171 H. N. Lê .......................................... 94 I. Anta Fernández ......................... 168 I. C. Guerrero ....................... 142; 160 I. Cañas ........................................ 172 I. Cárdenas Anguita ...................... 149 I. Fernández ......... 151; 152; 153; 154 I. Friso .......................................... 126 I. Goicoechea Castaño ................... 28 I. Ladrón de Guevara ..................... 17 I. Lengua Lengua............... 32; 99; 142 I. Lidón López ................................. 17 I. Lopez ......................................... 103 I. Sentana ............................... 15; 137 Ignacio Cañas ....................... 143; 145 J. A. Cañas Madueño ................... 158 J. A. Flores Soto ............................ 143 J. A. Simoes .................................. 120 J. Alonso Trigueros ....................... 132 J. C. Asenjo ................................... 150 J. C. Rubio Romero ....................... 130 J. Cerqueiro .............................. 35; 92 J. Cid Falceto ................................ 143 J. Delgado ............................ 151; 154 J. F. Petiot ...................................... 60 J. Felez.................................... 71; 118 J. G. Negreiros ...................... 152; 154 J. Gimenez López ............................ 32 J. Gonzalez-del-Rio....................... 170 J. Grandjean ................................... 93 J. H. Xin .......................................... 83 J. I. Prieto López ............................. 28 J. I. Rojas ........................................ 16 J. I. Rojas-Sola ........................ 34; 170 J. J. López ..................................... 148 J. Javier López .............................. 124 J. Jiménez ....................................... 17 J. L. Caro Rodríguez ........................ 42
J. L. Giménez López ..................... 142 J. L. Pérez ..................... 151; 153; 154 J. López Soto .................................. 42 J. M. Chacón ................................ 102 J. M. Gomis Martí .......................... 45 J. M. Sanz ....................................... 16 J. M. Sieffermann .......................... 60 J. M. Valderrama Zafra ................ 149 J. Maroto ....................................... 71 J. Martínez García ........................ 153 J. Ortiz ............................................ 68 J. P. Nadeau ................................... 52 J. P. Pernot ..................................... 47 J. Pailhes ...................................... 106 J. Pose ...................................... 35; 92 J. R. Andrés .................................. 157 J. Sánchez Reyes ............................ 46 J. Sancho Val .................................. 55 J. T. Fan .......................................... 83 J.L. Benito .................................... 145 J.L.García-Grinda ......................... 172 K. François Xavier .......................... 52 L. A. Lopresti .................................. 79 L. Barbieri ...................................... 47 L. Bifulco ...................................... 128 L. Carnevali .................................. 176 L. Ciocca ....................................... 119 L. D’Angelo .................................. 121 L. De Napoli ................................... 62 L. Di Angelo ...................... 41; 75; 114 L. Dunai .................................. 24; 142 L. Frattari ....................................... 86 L. Fuertes ..................................... 128 L. Giaccari ...................................... 41 L. Gimena............................. 124; 131 L. Governi ................................ 66; 76 L. López .................................... 35; 92 L. Lopresti .................................... 128 L. M. Papa .................................... 164 L. Martini ..................................... 164 L. Nalbone ................................... 116 L. Planchenstainer ....................... 112

180 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
L. Recanatesi ................................ 107 L. Seccia ......................................... 78 L. Silvestri ....................................... 86 L.Dunai ........................................... 66 M. A. Aguilar ................ 151; 153; 154 M. A. Contreras ............................ 157 M. A. Hidalgo Fernández ............. 158 M. A. Ruiz ............................. 142; 160 M. Ángel Aguilar .......................... 152 M. Ansaloni .................................... 54 M. Aoun ....................................... 120 M. Brodeschi .................................. 28 M. C. Ladrón de Guevara ............. 157 M. Calì ...................................... 82; 99 M. Caneri ....................................... 36 M. Capone ................................... 169 M. Carfagni .................................... 53 M. Castro-García ............................ 34 M. Cigola ...................................... 147 M. Crespo .................................... 131 M. D’Anna ...................................... 98 M. Danzart ..................................... 60 M. Davia ....................................... 115 M. De Giorgi ............................. 43; 44 M. del Mar Espinosa ...................... 16 M. del Mar Saldaña...................... 152 M. Domínguez ............................... 16 M. Fantini ....................... 78; 119; 135 M. Fiorentino ........................... 24; 67 M. Germani .......... 25; 35; 58; 77; 115 M. Giordano ................................... 79 M. Goñi ................................ 124; 148 M. Heredia Conde .......................... 45 M. Jaafarnia ................................... 14 M. L. Gil .......................................... 68 M. L. Ladrón de Guevara ............. 157 M. L. Luchi ...................................... 28 M. L. Martinez ............................. 118 M. La Mantia ................................ 175 M. Lo Turco .................................. 171 M. López ........................................ 15 M. Luz García ............................... 157
M. M. Bocconcino ....................... 134 M. Mandolini ......................... 35; 115 M. Marconi .................................... 58 M. Martorelli ....................... 113; 117 M. Mengoni ............... 25; 58; 77; 115 M. Mesnard ................................. 120 M. Muzzupappa....................... 28; 47 M. Nunziati .................................... 76 M. Olivier ....................................... 52 M. P. Iarossi ................................. 156 M. Palai .......................................... 66 M. Pappalardo ............................... 62 M. Pellicciari ...................... 54; 59; 85 M. Pérez Vázquez .......................... 45 M. Peruzzini ................................... 25 M. R. Cundari ............................... 173 M. Rizzi ........................................ 121 M. Tlija ........................................... 91 M. Toccafondi ................................ 66 M. Trotta ................................. 20; 86 M. Turchetto ............................... 112 M. Valiente López ........................ 168 M. Vezzani ................................... 100 M. Vitali ....................................... 159 M. Vozzola ................................... 171 M. W. Fu ........................................ 61 Mª. P. Carranza-Cañadas ............... 34 N. Cappetti .................................... 18 N. D. Perkinson ............................ 118 N. de la Puente .............................. 16 N. Ortigosa .................................... 66 N. Ortigosa Araque ........................ 24 N. Sesse ....................................... 137 O. Ampuero-Canellas .................. 170 O. D. de Cózar ................................ 17 P. Belardi ..................................... 164 P. Bust .......................................... 130 P. Cicconi ....................................... 35 P. D’Agostino ............................... 148 P. Darnis ........................................ 94 P. Di Stefano .......................... 75; 114 P. Franciosa ..................... 70; 86; 117
181 June 15
th – 17
th, 2011, Venice, Italy IMProVe 2011 - Proceedings
P. Gonzaga ........................... 124; 131 P. Ibáñez Carabantes ..................... 55 P. J. Juan Gutiérrez ...................... 167 P. Kiciak .......................................... 46 P. Manco ........................................ 43 P. Nicolas ....................................... 52 P. Núñez ....................................... 172 P. P. Valentini ................................. 26 P. R. López Para ............................. 42 P. Sanin ........................................ 138 P. Sebastian ......................... 104; 106 P. Sébastian ................................. 109 P. Stephane .................................... 52 P. Ubieto Artur ..................... 130; 133 P. Y. Mok ........................................ 83 R. Ambu ....................................... 105 R. Briand ...................................... 109 R. E. Hidalgo Fernández ............... 158 R. Furferi .................................. 53; 76 R. Gaha........................................... 50 R. García ....................................... 150 R. Mejia-Gutierrez ....................... 138 R. Meneghello .... 36; 40; 96; 112; 121 R. Miralbes ................................... 103 R. Nobile ........................................ 44 R. Prádanos .................................... 16 R. Raffaeli ....................... 77; 112; 115 R. Rebollar Rubio ........................... 17 R. Rosa ........................................... 91 R. Viganò ................................ 51; 131 S. Andreani .................................. 166 S. Bagassi ....................................... 84 S. Barba .......................................... 79 S. Barone ........................................ 69 S. Ceccacci ...................................... 25 S. Filippi .................................... 27; 57 S. Gavino ...................................... 128 S. Gerbino ................................ 70; 86 S. Giancane .................................... 43
S. Giovanzana .............................. 121 S. Gomes ........................................ 33 S. M. Oliveri ............................. 82; 99 S. Martínez .................................... 68 S. Martín-Ocaña .......................... 172 S. Moos .......................................... 95 S. Morillas ...................................... 66 S. Patalano ..................................... 86 S. Raschi ....................................... 173 S. Rizzuti .................................. 62; 91 S. Roth ........................................... 33 S. Samper ....................................... 93 S. Tichkiewitch ............................. 129 S. Tornincasa ............................... 110 T. Boudouh .................................... 33 T. Gil López .................................. 168 T. Ingrassia ............... 82; 98; 113; 116 T. Magal ......................................... 71 T. Magal Royo ........................ 32; 142 T. Quirante .................................. 104 T. Rego ........................................... 68 V. A. Lokhov ................................. 120 V. Dattoma .................................... 43 V. Delos.......................................... 93 V. Dupé ........................................ 109 V. M. Santiago ............................... 66 V. Nigrelli ......................... 82; 98; 116 V. Ricotta ............................. 113; 116 V. Rufrano ...................................... 86 V. Santiago ..................................... 71 V. Santiago Praderas ............... 24; 99 W. L. Chan ..................................... 61 X. Fischer ..................................... 109 Y. L. Kwok ...................................... 83 Y. Ledoux ......................... 93; 94; 104 Y. Nyashin .................................... 120 Y. Volpe ................................... 53; 66 Y. Y. Wu ......................................... 83