time response of linear dynamical systems in state space form
TRANSCRIPT

Lecture – 18
Time Response of Linear Dynamical Systems in State Space Form
Dr. Radhakant PadhiAsst. Professor
Dept. of Aerospace EngineeringIndian Institute of Science - Bangalore

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
2
Solution of Linear Differential Equations
Linear systems:Systems that obey the “Principle of superposition”.
Uniqueness Theorem:There is only one solution for linear systems.

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
3
Solution of Homogeneous Linear Differential Equation: Scalar caseSystem dynamics:Solution:
Initial condition:
Hence,
00 )(, xtxaxx ==( )
( )
/ln lnln /
at
dx x a dtx a t cx c a t
x e c
=
= +
=
=0 0
0 0,at atx e c c e x−= =
0)( 0)( xetx tta −=

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
4
Note:2 2 3 3
12! 3!
at a t a te at= + + + +
0
0
If 0, then the solution is( ) at
tx t e x
=
=
Solution of Homogeneous Linear Differential Equation: Scalar case
ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
5
Solution of Homogeneous Linear Differential EquationsSystem dynamics:
Guess solution:
Verify (substitute the guess into the differential equation)
0 0, ( )X AX X t X= =
[ ]1( ) , TAtnX t e C C c c= =
2 2 3 3/ 2! / 3!Ate I At A t A t+ + + +
( )At Atd e C A e Cdt
⎛ ⎞ =⎜ ⎟⎝ ⎠

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
6
Solution of Homogeneous Linear Differential EquationsA Result:
i.e.
( ) ( ) ( )( )
2 2 3 3
2 3 2
2 2 3 3
/ 2! / 3!
0 2 / 2! 3 / 3!
/ 2! / 3!
At
At
At
e I At A t A td e A A t A tdt
A I At A t A t
Ae
= + + + +
= + + + +
= + + + +
=
( ) ( )At AtAe C A e C=
Therefore ( ) is 'a' solution.Hence, ( ) is 'the' solution.
At
At
X t e CX t e C
=
=

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
7
Solution of Homogeneous Linear Differential Equations
Applying the initial condition
Another result:(easy to show from definition)
Taking
Thus
Finally
0
0
0
1
0
At
At
X e C
C e X−
=
⎡ ⎤= ⎣ ⎦
( ) 0 0( )0 0
At A t tAtX t e e X e X− −= =
( )1 2 1 2A t t At Ate e e+ =
1 0 2 0 and ,t t t t= = − 0 0At AtI e e−=0 0
1At Ate e− −⎡ ⎤ =⎣ ⎦

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
8
Non-homogeneous system:
Solution contains two parts:• Homogeneous solution• Particular solution
Homogeneous solution:
Particular solution:
00 )(, XtXBUAXX =+=
( ) ( )AtpX t e C t=
0( )0( ) A t t
hX t e X−=
Solution of Non-homogeneous Linear Differential Equations

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
9
1
1
( )
( ) ( ) ( )
( )
tAt At A
pt
tA t
t
X t e C t e e BU d
e BU d
τ
τ
τ τ
τ τ
−
−
= =
=
∫
∫
Solution of Non-homogeneous Linear Differential Equations
1
( ) ( )
At At Atp
At
tA
t
X e C Ae C Ae C BU
C e BU
C t e BU dτ τ τ
−
−
= + = +
=
= ∫
ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
10
Complete solution:
Initial condition:
0
1
( ) ( )0
( ) ( ) ( )
( )
h p
tA t t A t
t
X t X t X t
e X e BU dτ τ τ− −
= +
= + ∫
0
1
0
1
0
( )0 0
( )
At
( )
( ) 0
tA t
t
tA t
t
t t
X X e BU d
e BU d
τ
τ
τ τ
τ τ
−
−
=
= +
=
∫
∫1 0This suggests that t t=
Solution of Non-homogeneous Linear Differential Equations

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
11
Complete solution:
The integral term in the forced system solution is a convolution integral.
Note: If is in feedback form
τττ dBUeXetXt
t
tAttA )()(0
0 )(0
)( ∫ −− +=
( )0( )
0( ) CL
CL
A t t
X A BK X A X
X t e X−
= − =
=
U ( )U K X= −
Solution of Non-homogeneous Linear Differential Equations

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
12
Solution of Non-homogeneous Linear Differential Equations:Some Comments
0
0
The solution results do not demand that .They are equally valid even if .
t tt t
≥≤
The integral term in the forced system solution is a "convolution integral".i.e. The contribution of input ( ) is the convolution of ( ) with .Hence, the function has the role of "impulse r
At
At
U t U t e Be B esponse" of the system
whose output is ( ) and input is ( ).X t U t
The solution for output ( ) is also readily available from ( ) and ( ) :( ) ( ) ( )
Y t X t U tY t CX t DU t= +

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
13
Example: Motion of a car without frictionThe equation of motion is
( )
0
0
( )1/ ( ) Assumption: is constant.
0 1 0( ), (0)
0 0 1/A B
m x f tx m f t m
v xxx x
X f t Xvv v m
=
=
⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤= = + = ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
14
Example: Motion of a car without friction
( )0
0
22
( )
( )
( ) ( )
1 0 0 1 10 1 0 0 0 12!
10 1
1 0 10 1 1/ 1
tAt A t
At
A t
A t
X t e X e B f d
tte I At A t
te
t te B
m m
τ
τ
τ
τ τ
τ
τ τ
−
−
−
= +
⎡ ⎤ ⎡ ⎤ ⎡ ⎤= + + + = + =⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦ ⎣ ⎦−⎡ ⎤
= ⎢ ⎥⎣ ⎦
− −⎡ ⎤ ⎡ ⎤ ⎡ ⎤= =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
∫

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
15
Example: Motion of a car without friction
0 0 00 0
0 00 0
1 1( ) ( ) ( ) ( )( )( ) 1 1( ) ( )
t t
t t
x v t t f d x v t t f dm mx t
v tv f d v f d
m m
τ τ τ τ τ τ
τ τ τ τ
⎡ ⎤ ⎡ ⎤+ + − + −⎢ ⎥ ⎢ ⎥⎡ ⎤ ⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ + +⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
∫ ∫
∫ ∫
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+
−++=⎥⎦
⎤⎢⎣
⎡
at
at
atv
attatvxtvtx 2
0
2
00 21
2)(
)()(
( ) /f t m a=Special case: (constant) and ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡00
0
0
vx

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
16
Evaluation of :A Useful Result
Ate
( )( )
( )
0
0
1
0
110
( ) ( )( )
( )
( )
sX s X A X ssI A X s X
X s sI A X
X t L sI A X
−
−−
− =
− =
= −
⎡ ⎤= −⎣ ⎦
0, (0)X A X X X= =Problem:
Solution using Laplace transform:
Solution known:
0( ) AtX t e X=
Comparing the two solutions:
( ) 11Ate L sI A −− ⎡ ⎤= −⎣ ⎦
ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
17
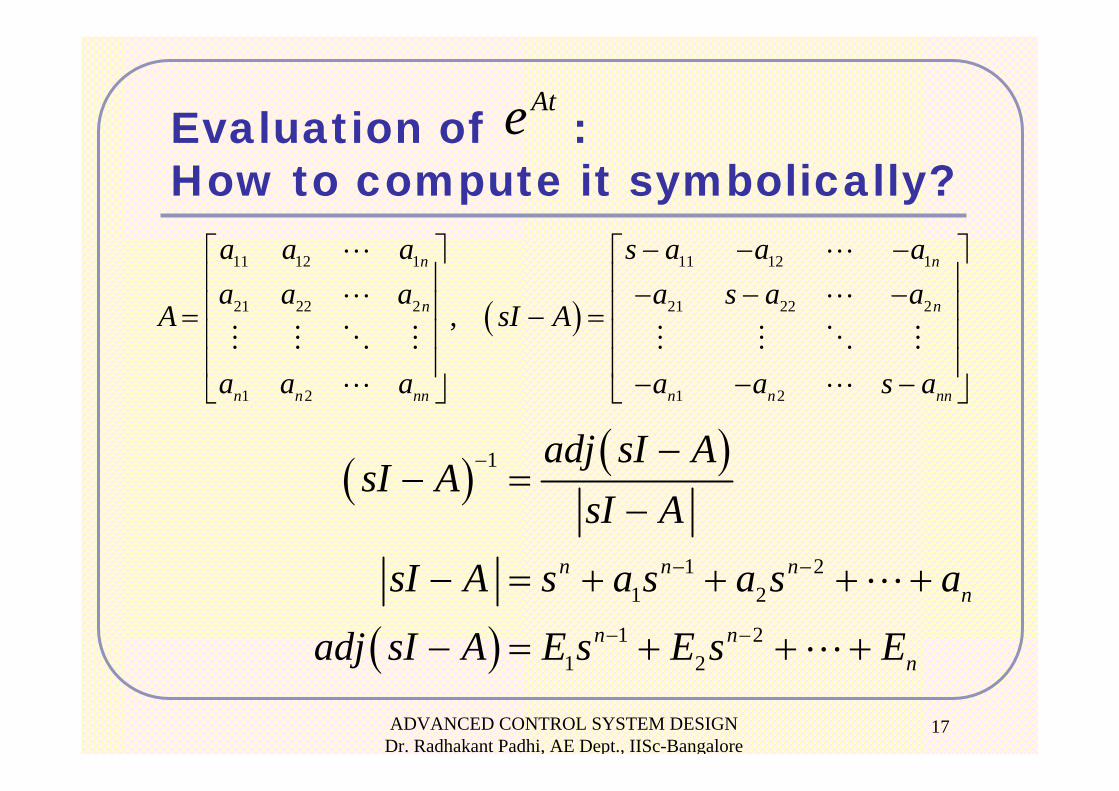
Evaluation of :How to compute it symbolically?
Ate
( )
11 12 1 11 12 1
21 22 2 21 22 2
1 2 1 2
,
n n
n n
n n nn n n nn
a a a s a a aa a a a s a a
A sI A
a a a a a s a
− − −⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥− − −⎢ ⎥ ⎢ ⎥= − =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− − −⎣ ⎦ ⎣ ⎦
( ) ( )
( )
1
1 21 2
1 21 2
n n nn
n nn
adj sI AsI A
sI A
sI A s a s a s a
adj sI A E s E s E
−
− −
− −
−− =
−
− = + + + +
− = + + +

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
18
Symbolic computation ofAte
( )( )( )
( ) ( )
1 21 2
1 21 2
1 21 2
11 2 1 1
n n nn
n nn
n n nn
n nn n n
I s a s a s a
sI A E s E s E
s I a s I a s I a Is E s E AE s E AE AE
− −
− −
− −
−−
+ + + +
= − + + +
+ + + +
= + − + + − −
( )( )( )( )1 2
1 1 2
1 11 2
n nn
n n nn
sI A E s E s EsI A sI A
s a s a s a
− −−
− −
− + + +− − =
+ + + +
Equate the coefficients on both sides…

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
19
Symbolic computation ofAte
1
2 1 1
3 2 2
1 1n n n
n n
E IE AE a IE AE a I
E AE a IAE a I
− −
=− =− =
− =− =
This suggests a recursive algorithm!(provided are known)1, , na a…
( )1
for 1, ,
i ia Tr AEi
i n
⎛ ⎞= −⎜ ⎟⎝ ⎠= …
Reference: T. Kailath, Linear Systems, Prentice-Hall, 1980.

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
20
Solution of Linear Time Varying SystemsHomogeneous Linear SystemSolution:
PROPERTIES OF STM
1. It satisfies linear differential equation
2.
3. For any three time instants
),()( τϕϕ ttAt=
∂∂
Itt =),(ϕ
( )X A t X=( ) ( ) ( )( )
,
, :State Transition Matrix (STM)
X t t X
t
ϕ τ τ
ϕ τ
=
3 1 3 2 2 1( , ) ( , ) ( , )t t t t t tϕ ϕ ϕ=

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
21
Properties of STM4.
1)],([),( −= τϕτϕ tt
)()()()()(
)0(
1 tttt
I
−=
+==
− ϕϕ
τϕτϕϕϕ
5. For time-invariant systems
6. For linear time invariant system( )( , ) A tt e τϕ τ −=

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
22
Solution: How to determine
0( ) ( , ) ( )X t t t C tϕ=
[ ]
0
10
10 0
0 0 0 0
, [ ( , )]
( ) ( ) ( , ) ( ) ( )
( ) ( ), ( , )
t
t
X AX BU
C C A C BU C t t BUt
C t C t t B U d
X t C t t t I
ϕ ϕ ϕ ϕ
ϕ τ τ τ τ
ϕ
−
−
= +
∂⎡ ⎤ + = + =⎢ ⎥∂⎣ ⎦
⎡ ⎤= + ⎣ ⎦
= =
∫
?)(tC(Method of variation of parameters)
Solution of Linear Time Varying Systems

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
23
[ ]
0
0
0
10 0 0
0 0 0 0
0 0
( ) ( , ) ( ) ( , ) ( ) ( )
( , ) ( ) ( , ) ( , ) ( ) ( )
( ) ( , ) ( ) ( , ) ( ) ( )
t
t
t
t
t
t
X t t t X t t B U d
t t X t t t t B U d
X t t t X t t B U d
ϕ ϕ τ τ τ τ
ϕ ϕ ϕ τ τ τ τ
ϕ ϕ τ τ τ τ
−⎡ ⎤
= +⎢ ⎥⎢ ⎥⎣ ⎦
= +
= +
∫
∫
∫
Solution of Linear Time Varying Systems

ADVANCED CONTROL SYSTEM DESIGN Dr. Radhakant Padhi, AE Dept., IISc-Bangalore
24