thrust id: peer-to-peer hri training and learning with humans rod grupen (lead) cynthia breazeal...
TRANSCRIPT

Thrust ID: Peer-to-Peer HRI Training and Learning with Humans
Rod Grupen (lead)
Cynthia Breazeal
Nicholas Roy
MURI 8Kickoff Meeting 2007

MURI 8Kickoff Meeting 2007
Interactive Training in Human-Robot Teams
MIT-Vanderbilt-StanfordUW-UMASS Amherst
Learning from human demonstration common ground - project proprietary sensory and motor policy spaces into a common frame asking questions and providing explanations combine learned policies flexibly and effectively in response to new run-time situations perform peer-to-peer policies jointly with humans and other robots

MURI 8Kickoff Meeting 2007
Thrust ID Objectives
MIT-Vanderbilt-StanfordUW-UMASS Amherst
build libraries of schema for component tasks underlying triage, hazmat, and HRI acquaint human partners with capabilities and limitations of robot partners establish common knowledge about strategies, procedures, and practices negotiate roles and preferences for joint activity master joint activities through practice

MURI 8Kickoff Meeting 2007
Action Schemas - Hierarchy
MIT-Vanderbilt-StanfordUW-UMASS Amherst
computational model of infant development
stage 1 - touch what you seestage 2 - the length of your armstage 3 - grasp affordancesstage 4 - human collaboration
Vgotskian pointing
multi-body objects: simultaneous trackability attributes: motion (scale, multi-body kinematics), topological/geometrical attributes, hue, saturation, intensity, texture
QuickTime™ and aVideo decompressor
are needed to see this picture.

MURI 8Kickoff Meeting 2007
Action Schemas - Generative Models, Teleology, and Transfer Learning
MIT-Vanderbilt-StanfordUW-UMASS Amherst
QuickTime™ and aH.264 decompressor
are needed to see this picture.
teleoperatorsorting instruction
QuickTime™ and aMPEG-4 Video decompressor
are needed to see this picture.
sorting replaywith prior knowledge
(1) parse events to find
a matching schema.
(2) associate goalswith schema
(3) Replicatedemonstrationwith contingencies

MURI 8Kickoff Meeting 2007
Commodity Mobile Manipulators
MIT-Vanderbilt-StanfordUW-UMASS Amherst
…nature routinely selects for dynamics to combine speed and agility with light weight and low power…
strength, performance, safety
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and aMPEG-4 Video decompressor
are needed to see this picture.

MURI 8Kickoff Meeting 2007
Whole-Body Primate/Hominid/Human Model
MIT-Vanderbilt-StanfordUW-UMASS Amherst
QuickTime™ and aMPEG-4 Video decompressor
are needed to see this picture.
QuickTime™ and aMPEG-4 Video decompressor
are needed to see this picture.
postural stabilityprehensile skillstool usesocial organization
MURI 8Kickoff Meeting 2007
Contributions
MIT-Vanderbilt-StanfordUW-UMASS Amherst
multi-agent, and human-robot schema for coordinated actioninteractive, socially-guided learning from demonstration (question/explain)hierarchical composition of skillscommunicative actions to convey states, objects, and actions
MURI 8Kickoff Meeting 2007
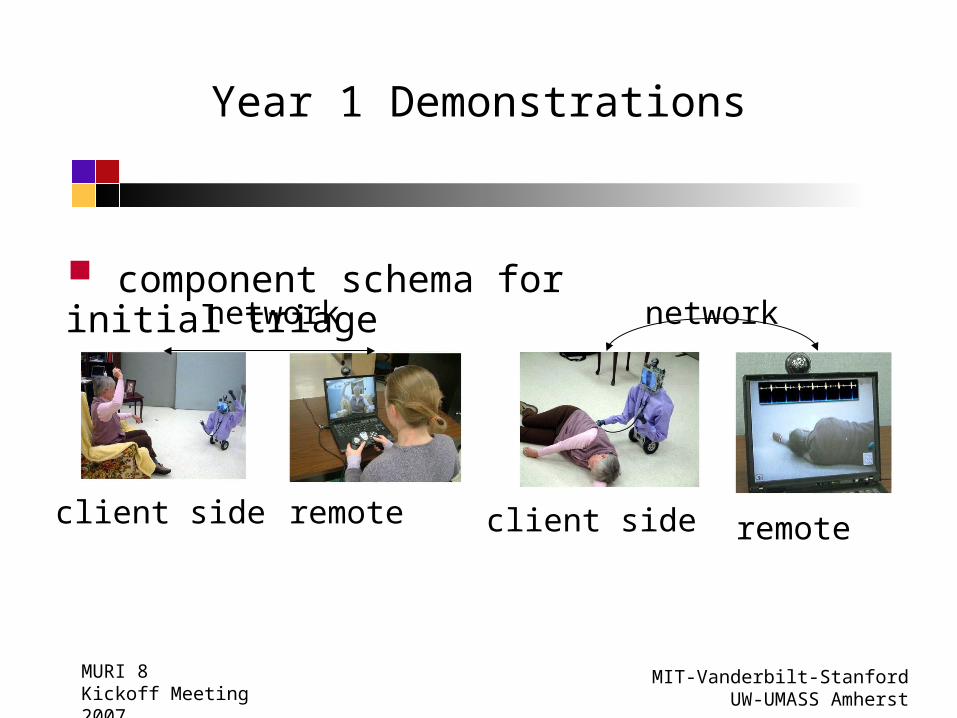
Year 1 Demonstrations
MIT-Vanderbilt-StanfordUW-UMASS Amherst
component schema for initial triage
client side remote
network
client side remote
network

MURI 8Kickoff Meeting 2007
Year 1 Demonstrations
MIT-Vanderbilt-StanfordUW-UMASS Amherst
sample acquisition, and cataloging
QuickTime™ and aMPEG-4 Video decompressor
are needed to see this picture.
QuickTime™ and aMPEG-4 Video decompressor
are needed to see this picture.
load carrying strategies that do not violate stability constraints of the platform
tool usehazard containment

MURI 8Kickoff Meeting 2007
Year 2 (and onward)
MIT-Vanderbilt-StanfordUW-UMASS Amherst
role engagement and switching in multi-robot, and human-robot strategies
remote humans, prior knowledge, maps, run-time situational awareness, mental models, asymmetric beliefs, affect on communicative actions
UGV/UAV/human coalitions