three-dimensional projection pursuit - department of mathematics
TRANSCRIPT

Three-Dimensional Projection Pursuit
By GUY NASON
Department of Mathematics, University of Bristol, University Walk, Bristol, BS8 1TW, UK
Email: [email protected]
SUMMARY
The development and usage of an approach to three-dimensional projection pursuit is discussed. The well-
established Jones and Sibson moments index is chosen as a computationally efficient projection index to
extend to 3D. The 3D index was initially developed to find interesting linear combinations of spectral bands
in a multispectral image. Computer algebraic methods are extensively employed to handle the complex
formulae that constitute the index and are explained in detail. A discussion of important practical issues
such as interpreting projection solutions, dealing with outliers and optimization techniques completes the
description of the index. An artificial tetrahedral data set is used to demonstrate how 3D projection pursuit
can produce better clusters than those obtained by principal components analysis. The main example
shows how 3D projection pursuit can successfully combine bands to discover alternative clusters to those
produced by, say, principal components.
Keywords: projection pursuit; multispectral images; clustering; computer algebra; varimax
rotation
1 Introduction
This article discusses various aspects of projection pursuit into three dimensions.
The aim of projection pursuit is to find interesting linear combinations of variables
in a multivariate data set. The precise definition of “interesting” is given later
but clusters and other forms of non-linear structure are interesting. One- and two-
dimensional projection pursuit have been dealt with extensively in the literature and
some excellent software implementations are available. The benefit of projection
into three-dimensions is that more complex structures can be identified than with
lower-dimensional projections. Projection pursuit into three dimensions is particularly
attractive for two further perceptual reasons. Firstly, colours naturally correspond
to 3-vectors, for example through the RGB representation. Secondly, point clouds
and other objects in three dimensions can be investigated on computer screens. For
example through spinning 3D plots, which are immediately comprehensible because
of our 3D intuition. These reasons are important when applying 3D projection pursuit
1

to multispectral images (colour) and multivariate data sets (intuition).
Section 2 briefly describes projection pursuit and includes details on projection
indices and the process of sphering. Section 3 explains that we have chosen to extend
Jones and Sibson’s (1987) well-known moments index into three dimensions because
of its computational efficiency. The formulae for the moments index were analytically
computed by the computer algebra package REDUCE (see Section 3.3). Section 3
also addresses the differentiation and optimization of the moments index, examines
how outliers can be treated to provide better projection solutions and discusses how
optimal projections can be rotated to give solutions that are more easily interpreted.
Section 4 gives two examples of projection pursuit in action. The first example
applies the pursuit to an artificial data set that has a three-dimensional structure
embedded within a noisy six-dimensional data set. No single one- or two-dimensional
projection will clearly show the structure and with these data the principal components
are contaminated with noise. The projection pursuit method clearly isolates the
three-dimensional structure and gives clearer definition to the clusters than principal
components analysis does. Many real multivariate data sets are of this type (for
example, the Lubischew (1962) beetle data).
The second example and the main reason for the development of three-dimensional
pursuit is discussed section 4.3. This example shows how projection pursuit may be
applied to some real multispectral image data to produce low-dimensional projections
that exhibit clustering. We argue that tighter clusters in variable-space result in better
contrasts between differing land use types and we give an example where this is so.
2 A brief description of projection pursuit
SupposeX is aK � N data matrix ofN observations onK variables. Define the
multivariate mean ofX by:
�X =X1NN
;
where1N is theN -dimensional vector consisting solely of ones. The centred data!
X
are obtained by subtracting the mean vector off each observation:
!
X= X ��X1TN :
2

The sample variance matrix ofX is obtained from the centred data by
SX =
!
X!
XT
N � 1:
The aim of classical principal components analysis (PCA) is to find linear
combinations of the original variables that have maximal sample variance. The linear
combinations can be thought of as projections onto a projection direction defined by a
unit vectora:
Z = aTX:
The sample variance of the projected data is
varX(a) = aTSa: (1)
The first principal componenta� is the vector that solves the following optimization
problem:
arg max varX(a) subject toaTa = 1: (2)
Thekth principal component (PC) is the vectorx that solves (2) with the additional
constraint of being orthogonal to the previousk�1 components. Thus PCAmaximizes
a functionof the projection vectora. The variance function is a quadratic form ina
and therefore an analytical solution exists. The PCs are the eigenvectors ofS and the
principal variances associated with each component are the eigenvalues ofS.
The aim of projection pursuit is different to that of PCA: projection pursuit
searches for projections that areinteresting rather than those that exhibit large
variation. Projection pursuit also maximizes a function ofa but the difference is that
the function (generally called a projectionindex) measures some criterion of interest
within the projected data. As a result the maximization problem usually becomes
analytically intractable and has to be solved using numerical methods. We denote a
generic projection index byI(a) and so for projection pursuit the optimization problem
becomes:
arg maxI(a) subject toaTa = 1: (3)
3

2.1 Projection indices
The choice of projection index is important in projection pursuit. The projected sample
variance (1) could be used as a projection index, but there would be little point because
there is an analytical solution.
Successful projection indices are designed to respond to interesting or clustered
variation — not just the large variation discovered by PCA. Early work by Friedman
and Tukey (1974) developed a projection index to search for non-linear structure.
Subsequently Huber (1985) and Jones and Sibson (1987) considered the population
rather than the sample case and assumed that the projected data,aTX, has a density,
fa(x). Their projection indices were based on measuring the departure offa(x) from
the standard normal density�(x). This is based on the heuristic that normality is the
least interesting density on the line. In practice departures can be measured by forming
a density estimatefa(x) of the projected data and comparing it to standard normality.
Huber (1985) and Jones and Sibson (1987) suggested a projection index based on the
Shannon entropy
IS(a) =
Z1
�1
fa(x) log fa(x) dx: (4)
The entropy index (4) is sometimes used in projection pursuit because it is uniquely
minimized by the standard normal density. There are several other possible choices for
a projection index (see Cooket al. (1993) for a list). Projection into two dimensions
is common and has been promoted extensively in the literature and in implementation.
An excellent implementation that exists for running two-dimensional pursuit is the
XGobi program described by Swayneet al. (1991; 1990).
2.2 Centring and sphering
A data set is sphered by using a linear transform to cause the transformed data to have
zero mean and identity variance matrix.
If a linear transformationQ is applied to the centred data!
X then the result
Y = Q!
X is also centred and has variance
SY =Y Y T
N � 1=Q!
X!
XT
QT
N � 1= QSXQ
T :
4

One convenient choice ofQ that ensures thatSY is the identity matrix isQ = S�
12
X
which may be computed from the principal components ofX.
The are two main reasons for sphering:
1. the variables ofY are uncorrelated. Any structure that projection pursuit
picks up will be independent of PCA. Indeed PCA investigates the covariance
structure of data so it would be wasteful for projection pursuit to do the same.
2. sphering simplifies the design of projection indices because the projections of
sphered data are themselves sphered.
A more detailed explanation for sphering in projection pursuit can be found in
Jones and Sibson (1987). A more general discussion of sphering may be found in
Tukey and Tukey (1981).
3 Three-dimensional projection pursuit
3.1 Introduction
The benefit of three-dimensional projection is that more complicated structures can be
observed than in one or two dimensions. For example, a torus or a sphere would be
difficult to determine from a single one- or two-dimensional projection.
We now describe a three-dimensional projection index and how it is computed
and optimized. We detail how outliers can affect the pursuit and what can be done to
reduce their influence. Lastly, we describe a way in which projections can be made
more interpretable in terms of original measurement variables.
3.2 A projection index for three dimensions
A projection index into three dimensions is a function of three projection vectors. The
optimization problem (3) becomes
arg maxI(a; b; c) subject toaTa = bT b = cT c = 1 andaT b = aT c = bT c = 0:
Again the projection vectors are of unit length but they are also forced to be orthogonal.
The orthogonality is a convenience mainly for computational reasons but also aids
5

interpretation of the final projection solution.
Many two-dimensional indices could be extended to a three-dimensional form.
We choose one in particular because it requires less computational effort than other
indices. The one-dimensional index was devised by Jones and Sibson (1987) and
is based on the following approximation of the difference between the Shannon
entropies (4) of the projected data density,f , and the standard normal density�:
Zf(x) log f(x) dx�
Z�(x) log �(x) dx �
��23 +
14�
24
�=12; (5)
where�3 and�4 are the third and fourth order cumulants of the projected sphered data.
(If we denote therth moment by�r then for sphered data we have�1 = 0, �2 = 1 and
�3 = �3 and�4 = �4 � 3). In practice the cumulant based quantity on the right-hand
side of (5) is estimated by a sample version computed on the projected data. We shall
discuss estimation in the next section.
Jones and Sibson’s two-dimensional moments index is derived using precisely the
same argument as for the one-dimensional case. The index is given in terms of two-
dimensional cumulants��� as:
(�230 + 3�221 + 3�212 + �203) +1
4(�240 + 4�231 + 6�222 + 4�213 + �204): (6)
Our extension of Jones and Sibson’s index to three dimensions in terms of three-
dimensional cumulants��� is:
X�+ � + = 3
�; �; = 0; : : : ; 3
C(3)�� �
2�� +
1
4
X�+ � + = 4
�; �; = 0; : : : ; 4
C(4)�� �
2�� : (7)
The three-dimensional index may be obtained by repeating Jones and Sibson’s (1987)
mathematical argument or by studying the final steps in the derivation of the two-
dimensional index. The coefficients of the bivariate cumulant��� in (6) are simply
the coefficients ofx�y� in the expansion of(x+y)r. SimilarlyC(r)�� is the coefficient
of x�y�z in the expansion of(x + y + z)r. Mardia (1987) noted the connection
between moments indices and formal tests for non-normality and also suggested an
alternative means of obtaining higher-dimensional projection indices.
6

One important property of moments indices of the type (6) and (7) is that they
are rotationally invariant with respect to any choice of axes for the projection space
(a; b; c). Another set of vectors(d; e; f) can be chosen that represent the same
projection space as(a; b; c) but differ by a rotation. We would want the index to
remain the same on(d; e; f) as on(a; b; c) since it is the projection space that matters
not the way in which wish to represent it. Surprisingly many indices do not have
this property (Friedman and Tukey (1974) and Friedman (1987)) although more recent
indices do (for example Morton (1989) and Cooket al. (1993)). The invariance is
important during the optimization sequence since optimizers can spend time changing
the representation when they should be changing the projection space. Also it is
sometimes useful to be able to rotate the representing axes to aid interpretability of the
projection solution without changing the projection index. We discuss this procedure
in Section 3.5.
Estimation of the projection index
Kendall et al. (1969) described a class of unbiased estimators for cumulants of any
order known ask-statistics. Thek-statistics are computed from the projected sphered
data and are dependent on the projection vectors. Therefore Jones and Sibson’s one-
dimensional sample index was obtained by replacing cumulants withk-statistics in
equation (5):
M1(a) = k23(a) +1
4k24(a); (8)
where thek-statistics were computed from the projected sphered dataYi by
k3(a) =N
(N � 1)(N � 2)
NXi=1
Y 3i (a); (9)
and
k4(a) =N
(N � 1)(N � 2)(N � 3)
((N + 1)
NXi=1
Y 4i (a)�
3(N � 1)3
N
): (10)
In the two-dimensional case the bivariate cumulants��� are replaced by bivariate
k-statisticsk�� and similarly for the three-dimensional index. The formulae fork3
andk4 were given by Kendallet al. (1969, page 280) and are modified for sphered
data in (9) and (10). Kendallet al. gave only a few of the formulae for trivariate
7

k-statistics, but they also gave an algorithm for deriving an arbitrary orderk-statistic
from the univariate ones.
Automating Kendall’s algorithm using computer algebra.
We repeat Kendall’s algorithm here because it is a good example of a procedure that
may be automated using computer algebra. Suppose that we wished to obtain the
bivariatek-statistick21. We would start with the formula ofk3 in terms of power
sums:
k3 =1
n[3](n2s3 � 3ns2s1 + 2s31);
wheren[k] is defined to be the descending factorialn(n � 1) : : : (n � k). First we
formalizethis equation by introducing a variabler:
k(r3) =1
n[3]
nn2s(r3)� 3ns(r2)s(r) + 2s(r)3
o: (11)
To produce the bivariate formula we must operate on (11) with the operatort @@r
and
obtain
3k(tr2) =1
n[3]
h3n2s(tr2)� 3n
n2s(rt) + s(t)s(r2)
o+ 6s(t)s(r)2
i:
Finally, replacing powers by subscripts and dividing both sides by three and obtain:
k21 =1
n[3]
�n2s21 � 2ns10s11 � ns20s01 + 2s210s01
�: (12)
This is precisely the formula fork21 as given by Kendallet al. (1969, page 308). We
could producek12 from (12) by applying the same operator as before. The trivariate
k111 would be obtained by using the operatoru @@r
on (12), which would introduce a
new variableu and differentiate ther2 and obtain the formula:
k111 =1
n[3]
nn2s111 � n (s011s100 + s001s110 + s101s010) + 2s101s010
o:
All the other trivariate formulae can be produced in this way and a complete list
necessary for the computation of the three-dimensional moments index (7) appeared
in Nason (1992).
The key operation above was the application of theu @@r
operator to the power sum
s(r3). In REDUCE this operation is programmed in as
8

FOR ALL U,R,N,KK LET OP(U,SF(KK*R**N),R)=N*SF(KK*U*R**(N-1));
This line says that for all instances of the variablesU,R,N,KK whenever the operator
OPis applied to argumentsU,SF(KK*R**N),R we get the result on the right-hand
side of the= sign. In this example we have effectively built our own differentiation
operator. REDUCE does have its own operator calledDIFF which we could have used
here. Although we believe that merely producing the trivariatek-statistics is enough
reason to use REDUCE there are other more compelling ones. REDUCE is able to
produce both typesetting instructions and FORTRAN code for the formulae making
incorporation into documents and computer programs easy and error free.
3.3 Computing the projection index
The algorithm that we use is that of Jones (1983) but modified for three-dimensions.
The logic of the algorithm is depicted in Figure 1. The rationale for computing the
k-statistics in this way originally stems from the way in which Kendallet al. (1969)
representk-statistics in terms of power sums, and power sums in terms of the data. Figure 1 here
First the third and fourth order product moment tensors are computed from the
sphered dataY by
Tpqr =NXi=1
YpiYqiYri (13)
Upqrs =NXi=1
YpiYqiYriYsi: (14)
All evaluations of the moments index and its derivatives are made using onlyT and
U . The link between the moments index andT; U is the basis of the moments index’s
computational efficiency and is discussed later in this section.
Next the power sums are computed from current projection using formulae such
as
s201 =KX
m=n=p=1
amancpTmnp (15)
s121 =KX
m=n=p=q=1
ambnbpcqUmnpq: (16)
The computation of the projection index requires 10 third order power sums and 15
fourth order sums. A complete list was presented by Nason (1992).
9

Finally, after thek-statistics have been computed the projection index and its
derivatives are computed with respect to the projection direction. The derivatives are
computed because they supply two useful pieces of information: they inform us of our
proximity to a local maximum and they indicate which direction should be followed
to increase the index.
Optimization
Most optimization methods find local optima and not the global optimum. This is
an advantage as a local optimum indicates some departure from normality and the
projection solution can be quickly examined for any possible structure. For projection
pursuit we believe that any reasonable optimizer is likely to be of use.
Many optimization methods have been used previously. For example: steepest
ascent (Jones and Sibson (1987)); genetic algorithms (Crawford (1991)); a coarse
stepping and Newton method hybrid (Friedman (1987)) and methods based on the
grand tour (Posse (1990)). We use the method of conjugate gradients and the
implementation supplied by the NetLib archive.
The projection pursuit optimization problem is constrained. Most of the optimizers
mentioned above are designed for unconstrained problems. To allow for this
Friedman (1987) maintained orthogonal projection vectors by modifying the derivative
of the projection index so that a step in the modified direction did not violate the
orthogonality constraints. We use the cruder method used by Jones and Sibson (1987)
which reorthogonalizes the projection vectors after an optimization step has been
taken.
Computing the derivatives
To optimize the projection index efficiently it is necessary to know the derivatives of
the projection index. Given the projection space(a; b; c) we need to find
@M3
@ar;@M3
@br;@M3
@cr;
for eachr = 1; : : : ;K. The indexM3 is composed of trivariatek-statistics which in
turn are composed of power sums. Differentiation ofM3 reduces to differentiation
10

of the power sums via the chain rule. Each power sum involved in the computation
must be differentiated with respect to each component of the three projection vectors.
For example, the power sums103 is a component of the projection index, and the
derivatives with respect to the projection vectors are:
@s103@ar
=X
cmcncpUmnpr � ars103 � 3crs202; (17)
@s103@br
= �3crs112; (18)
@s103@cr
= 3�X
amcncpUmnpr � ars202 � brs112 � crs103�: (19)
These derivatives look much more complicated than the form for power sums given
in (16). The original power sums are given for the orthonormalized versions of
the projection vectors. The derivatives are given in terms of the original projection
vectors that might not necessarily be orthogonal. This non-orthogonality may occur
temporarily after the optimizer had made a step in a particular direction and off
the manifold defined by the orthogonality condition. In all there are 30 individual
derivatives for the third order case and 45 for the fourth order case. The full results of
the differentiation can be found in Nason (1992).
Computational efficiency
The computation of the product moment tensors is anO(N) computation. Once these
have been computed all further evaluations of the moments index and its derivatives
are independent ofN . Indices such as those of Friedman (1987), Morton (1989),
Hall (1989) and Cooket al. (1993) require anO(N) computation foreveryevaluation
of the projection index during the optimization sequence. For small data sets the
difference in execution time is negligible. For large data sets, such as the image set in
Section 4.3, the moments index tends to find optimal solutions in about one tenth of
the time it takes other indices.
3.4 Treatment of outliers
A major criticism of the moments index is that it is sensitive to outliers and finds
outlyingprojections — that is projections that contain a few outliers and a single major
11

cluster. To alleviate the outlying projection problem we will either remove outliers or
trim them. Trimming involves shrinking outliers’ distancer to the centroid of the
set to a new distanceT (r). We implement two possible choices forT suggested by
Tukey (1987); they are
TL(r) = 1 + log(r); (20)
and
TS(r) = 3� 2r�12 : (21)
Tukey suggests that the data should be sphered first, then trimmed ifr > 1 and then
sphered again. The pursuit is then applied to the re-sphered data. Typically trimming
helps solve the problems caused by outliers, but not always.
3.5 Axes rotation
After performing projection pursuit we obtain an optimal projection(a; b; c) which
can be written in matrix form in terms of the original unsphered data asAX where
A = [a b c]T . Sometimes such a projection solution can be hard to interpret and it
would be useful to interpret what the projection vectors mean in terms of the original
variables. The three vectors define a particular space but not uniquely so. A3 � 3
rotation matrix can be applied to the projection without changing the projection index.
For example:
RA = [d e f ]T ;
where the rotated vectors(d; e; f) are also orthonormal. After a rotation the
configuration of the projected points does not change but the particular basis that they
are represented in does. However, performing a rotation may allow us to chooseR so
that(d; e; f) are easier to interpret than(a; b; c).
Choice of rotation and interpretability
What do we mean by interpretability? We consider the projection vector that has all
entries equal, or nearly so, to be hardest to interpret whereas vectors that have few
large and many small entries to be easiest. Working with this definition we need to
12

find the orthogonal matrixR that maximizes the criterion:
KXk=1
(dk �K�12 )2 + (ek �K�
12 )2 + (fk �K�
12 )2: (22)
In practice we implement the maximization in a varimax like way. Given two
projection vectors it is easy to compute the angle that maximizes the criterion for
those two only. A cycle of steps performs the pairwise maximization for all pairs
of projection vectors (in the three-dimensional case(d; e), (d; f) and(e; f)). Given
initial projection vectors(a; b; c) a number of cycles is performed until the maximum
absolute angle change within any step of a cycle is below some tolerance. The
procedure converges because the criterion (22) is bounded and each step within the
cycle increases the criterion.
Further details on varimax can be found in Kaiser (1958) and Friedman (1987). We
adopt a simpler approach to Friedman and just rotate the projection solution within its
own space after doing projection pursuit. However, for three-dimensional solutions we
adapt Kaiser’s iterative varimax algorithm to achieve the desired rotation.
4 Using three-dimensional projection pursuit
In this section we describe two examples. The first uses an artificial data set that shows
the ability of 3D projection pursuit to pull out structure that is not obtainable through
lower-dimensional pursuits or PCA. The second example describes an application of
three-dimensional projection pursuit to multispectral image data.
The code to compute the projection index and its derivatives is implemented in
FORTRAN77 and embedded within the statistical package S (Beckeret al. (1988)).
The code is freely available by electronic file transfer (Nason (1994)) or directly from
the author.
4.1 Using projection pursuit in S
The S functionpp3 performs projection pursuit on an S data matrix and returns a
complete record of the pursuit as a composite object. Some of the more interesting
items stored within the returned object are:
13

� the data projected onto the optimal projection plane (in both sphered and original
coordinate systems);
� a record of the projection index for each iteration;
� the number of iterations expended and the maximum possible;
� the sphered data;
� the sphering transformation matrix and its inverse;
� the modulus of the gradient of the projection index at termination and the
tolerance used to decide convergence
� the initial and final projection vectors.
4.2 A tetrahedral example
Although the data set described in this example is artificial it is similar to real
multivariate data in that there are loose clusters representing different populations and
other variables that do not discriminate between populations. For example, the well-
known Lubischew (1962) beetle data set is of this type, but its structure is usually clear
in one-dimension and not challenging enough for three-dimensional pursuit. We create
a 6-dimensional data set containing 400 observations and possessing a tetrahedral
structure in the first three and noise in the remaining three dimensions. There is no
single one- or two-dimensional projection that will give a complete idea of the true
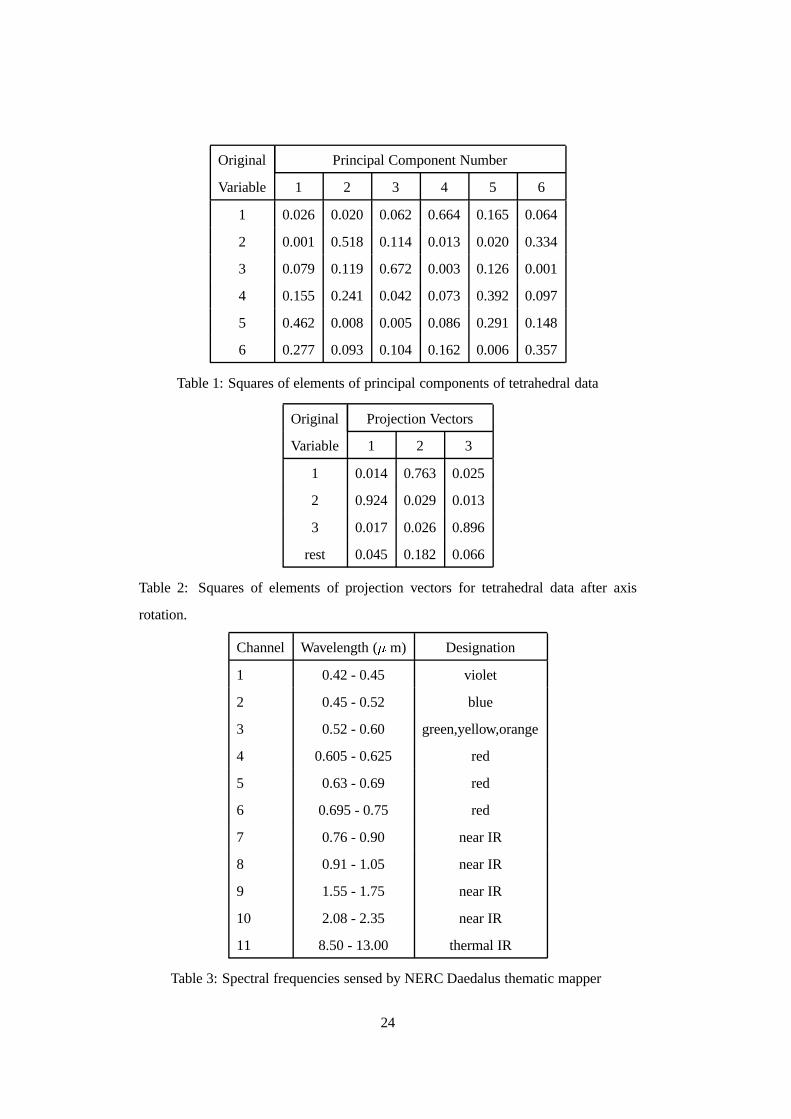
three-dimensional structure. The squares of the principal components of the tetrahedral
data appear in Table 1. The squares are shown to emphasize the contribution of
each element and consequently the sum of each column is 1. Each row of the table Table 1 here
corresponds to the variables that the tetrahedral data were originally recorded on. Even
knowing that the clustering is concentrated in the first three variables is no help here.
The only PCs that might be of some help in discerning the clusters are 2, 3 and 4
but even these contain some proportion of the noise variables. It is better to examine
the data with respect to these three PCs using a three-dimensional data viewer such
asbrush() in SPlus or XGobi. We obviously cannot show the three-dimensional
principal components picture here but the clustering is very difficult to see without
14
giving each point a group label (which defeats the aim of exploratory methods where
you may not know any structure but you are trying to find it).
Three-dimensional projection pursuit does much better. However, for this set
trimming was required to obtain a good solution. It is difficult to know when to trim
data and by how much. Generally Tukey’s advice from Section 3.3 is taken. That is,
the sphered data are trimmed if their distance to the centroid is larger than 1, although
this can sometimes be relaxed as in this example where points are trimmed ifr > 2:4.
The tetrahedral data were put into an S matrix calledtetra . Table 2 shows squares
of elements of the optimal projection solution arrived at after issuing the command:
> results <- pp3(tetra, trim.action="log", limit=2.4)
followed by the axes rotation procedure described in Section 3.5. It is patently clear in Table 2 here
Table 2 that the three-dimensional pursuit has extracted the tetrahedral structure. For
example, the first column in Table 2 has most of its weight associated with the second
original variable, the second column with the first original and the third column with
the third original variable. Once more it is impossible to properly show the three-
dimensional projection solution (since the paper only has 2 dimensions). Figure 2
shows the solution using the method of displaying two variables on a scatter plot and
coding the third as square size. The data in Figure 2 separate into four groups. The Figure 2 here
largest squares appear in the top-left hand portion and are overlaid with the smallest
squares which look like dots. These are two groups separated in the third dimension.
The other two groups are in the top-right hand portion (medium sized squares) and the
lower half of the plot (next smallest squares).
Finally, if three-dimensional projection pursuit is applied to the tetrahedral data
using the second, third and fourth PCs as a starting projection then the algorithm
converges to the projection pursuit solution shown here. The moments index was
initially 8.47 and increased to 9.73. The norm of the gradient was initially 0.81 and
decreased to0:00024. Some PCs often provide a reasonable starting projection space.
4.3 Analyzing multispectral data
The three-dimensional algorithm and software were developed primarily to apply
them to multispectral image data. Multispectral image data records the same image
15

scanned at many different frequencies. All the real images that we use to illustrate our
examples are images of Chew Valley Lake in Somerset, UK and have been scanned
by a Daedalus AADS 1268 thematic mapper from an aeroplane at a altitude of 2500
metres. The Daedalus scanned eleven frequencies and these are listed in Table 3. Each
image at each frequency consists of1254 � 715 pixels ( = 896610 pixels in all) and
the value of each pixel has a range from 0 to 255. The data can be thought of as Table 3 here
an image framework; that is there are 11 images each of dimension 1254 by 715 or
they can be thought of as a standard multivariate set with 11 dimensions and 896610
observations. We shall refer to these two aspects as “image-space” and “variable-
space”. Clustering can occur in both spaces. Usually spatial clusters in image-space
(fields, lakes, roads etc.) correspond to (parts of) clusters in variable-space. However,
clusters in variable space usually correspond to a collection of spatial features in
image-space. For example, in variable-space several wheat fields will occupy one
area but they could be spread as a patchwork across the landscape in image-space.
Two of the main objectives for the analysis of multispectral data are:
� the visual examination of the images;
� classification of pixels into land types.
Visual examination of the images can be carried out in several ways. Each frequency
in the image can be viewed separately as a grey scale image or three images may be
combined to form a colour image by assigning one scanner frequency to each of the
red, green and blue guns of a colour display. These two methods are analogous to
examining variables separately (as a density estimate perhaps) or as pairwise scatter
plots. Both are simple methods but their usefulness should not be underestimated.
Scanner frequencies may be combined in several ways to provide colour images.
There is the simple assignment mentioned above although withK scanner frequencies
there are
PK3 =
K!
(K � 3)!
ways of assigningK frequencies to 3 guns. In most cases expert knowledge will be
able to select the scanner frequencies of most use in a particular situation, but even
16
with K = 11 there are already 990 different assignments. Clearly with many more
scanners the problems quickly becomes severe.
One well-known approach to viewing image data involves displaying the data
with respect to their PCs. In this guise PCA is acting as a dimension reduction
technique. Dimension reduction is especially useful here because images from scanner
frequencies close in frequency are usually highly correlated. For example, Table 4
displays the correlation between some of the scanner frequencies for a small subsection
of the main Chew Valley image. Table 4 here
Clustering in the multidimensional space can and does appear when the data are
projected with respect to theiirr principal components. For viewing purposes tight
clustering in the variable-space corresponds to homogeneous colouring of areas of
land in image-space. What is required is not only a dimension reduction technique
but one that preserves or seeks out clustering in low dimensions. This is because if
clustering exists in higher dimensions we do not want to lose it through dimension
reduction, as that will cause loss of contrast in image-space. The other objective,
of classifying pixels, is aided by dimension reduction techniques that search out
clusters. Huber (1985) noted how the performance of various classification techniques
deteriorated in high dimensions and therefore good cluster-preserving dimension
reduction techniques are necessary.
Quite often large variation is due to separated clusters, but not always, as the
tetrahedral example showed in the previous section. As a result we propose three-
dimensional projection pursuit as a complement to PCA. We do not reject PCA because
it is a useful method, it is rapidly computed and widely understood. Finally, we
propose using the three-dimensional moments index because the image data sets are
large and require a computationally efficient index.
An example using the Chew Valley data
To illustrate and compare the methods a small100 � 100 pixel section of the Chew
Valley image is used. The image that we have selected is centred on the sailing club on
the lake. The image includes water, buildings, roads, trees and jetties! (Approximate
OS Map reference ST 568168). Colour images cannot be displayed here. However
17
grey-scale images can easily be displayed. In the following example both PCA and
three-dimensional projection pursuit are performed on the image section. We perform
PCA on the correlation matrix. We could have used the covariance matrix but we
wish to concentrate on clustering and are not really interested in large variance in any
particular direction. Performing PCA on the correlation matrix is valid and indeed
recommended in cases where the individual sample variances differ substantially in
order of magnitude (Chatfield and Collins (1980)[Section 4.4]).
For the projection pursuit a slightly elaborate procedure is adopted. After the
pursuit a three-dimensional data set is obtained and each of the dimensions could be
assigned to a colour. Alternatively the representation could be rotated like varimax
and then each variable assigned to a colour. This would relate colours to the original
variables which may aid interpretation. What we actually have done may be surprising:
we apply principal components to the three-dimensional pursuit solution. Typically
a successful pursuit solution contains well-defined clusters and the first principal
component of this exhibits the most well-defined cluster. With a colour display one
possible rule could assign the first PC of the pursuit solution to red, the second PC to
the green and the third to blue. This would ensure that the maximum contrast would be
applied to the colour that (most) human eyes are most sensitive to (Feynman (1963)) –
although clearly this is not the only assignment and eye sensitivities vary dramatically
from person to person. It is this first principal component (of the pursuit solution) that
we display below. We emphasize that this isnot the same as the first PC of the data.
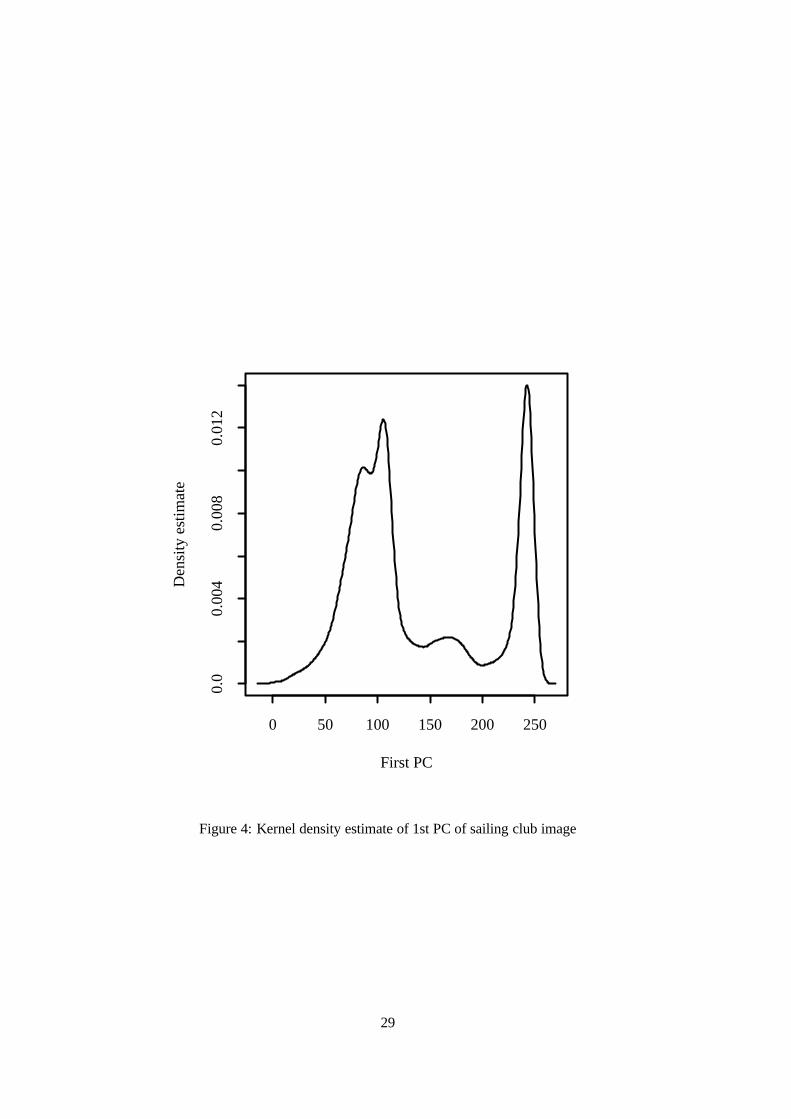
Figures 3 and 4 show normal kernel density estimates of the intensities from the
first true PC and the first principal component of the projection pursuit solution. These
are the most multimodal projections out of all the standard PCs and components of
pursuit solutions. The projection pursuit derived estimate is more multimodal than the
first PC estimate. This lends support to the claim that projection pursuit is capable of
finding more interesting projections than PCA. The monoimages corresponding to the Figure 3 hereFigure 4 heredensity estimates of Figures 3 and 4 are presented in the left-hand images in Figures 5
and 6. We used the local minima from the density estimates to divide the images Figure 5 hereFigure 6 hereinto different land-use types. Each of the right-hand side images in Figures 5 and 6 is
divided into regions defined by the density estimate divisions and each pixel is grey
18

shaded depending on its intensity in the pursuit or PCA solution. For example, the very
bright patches in Figure 5 correspond to the mode at the extreme right of the density
estimate in Figure 3.
As the projection pursuit solution has one more mode we can identify another type
of land with a new shade of grey. There are 5 grey shades on the projection pursuit
classification and 4 on the PCA picture. The differences between the classifications
can be most strikingly seen on the shore where projection pursuit has subdivided the
white area on the PCA picture into two groups and shaded them white and light grey
(right pictures in Figure 5 and 6). Indeed, no other PC makes this distinction. It is only
visible with the pursuit solution. What is even more fascinating is referring back to the
left-hand pictures in Figures 5 and 6. The areas that are differentiated by the extra grey
level do seem to correspond to different ground types. One grey level corresponds to
a grid-like network aligned with the jetties and the other to material in between. The
regularity of the network suggests that this is probably man-made and that projection
pursuit has discovered a real feature. However, projection pursuit can only fulfil an
exploratory role and a ground visit would be necessary to confirm the reality of such
features.
Naturally other PCs show interesting spectral band combinations that projection
pursuit does not find. We claim only that projection pursuit is an extra tool for finding
such combinations. The interest here lies in the greater multimodality of the pursuit
solution when compared to the first (or any) PC. Therefore projection pursuit would
be of value as an automatic band combination and selection tool because it is tuned for
clusters and not just large variation.
5 Conclusions and further work
This article shows the development and application of a three-dimensional projection
pursuit package based on a three-dimensional extension of the Jones and Sibson (1987)
moments index. The work involved in the development of the index was greatly
reduced by the use of computer algebra that permitted the arbitrary computation of
trivariatek-statistics. We have described how to use the pursuit within the statistical
19

package S using a freely available package. The potential of pursuit on real and
simulated data has been demonstrated and its performance compared to principal
components.
Further work will need to investigate the choice of outlier trimming and limit as
this sometimes determines the quality of the projection solutions.
Acknowledgments
The work reported here was supported partly by a grant from the UK Science and
Engineering Research Council (SERC). The author was a grateful recipient of a
SERC Research Studentship. The multispectral images described in Section 4.3 were
supplied by NERC Computer Services, UK. He is grateful to Robin Sibson for helpful
comments and advice, and to Merrilee Hurn and Bernard Silverman for many helpful
comments on an earlier version of this article.
References
Becker, R.A., Chambers, J. M. and Wilks, A. R. (1988).The New S Language. Pacific
Grove, CA: Wadsworth and Brooks/Cole.
Chatfield, C. and Collins, A. J. (1980).Introduction to Multivariate Analysis. London:
Chapman and Hall.
Cook, D., Buja, A. and Cabrera, J. (1993). Projection pursuit indices based on
expansions with orthonormal functions.J. Comput. Graph. Statist., 2, 225–250.
Crawford, S. L. (1991). Genetic optimization for exploratory projection pursuit.
In Computer Science and Statistics: Proc. 23rd Symp. Interface(ed. E. M.
Keramidas), pp. 318–321. Fairfax Station, VA: Interface Foundation.
Feynman, R. P. (1963).The Feynman Lectures on Physics. Vol. 1. Reading, Mass.:
Addison.
Friedman, J. H. (1987). Exploratory projection pursuit.J. Am. Statist. Ass., 82, 249–
266.
20
Friedman, J. H. and Tukey, J. W. (1974). A projection pursuit algorithm for exploratory
data analysis.IEEE Trans. Comput., 23, 881–890.
Hall, P. (1989). On polynomial-based projection indices for exploratory projection
pursuit.Ann. Statist., 17, 589–605.
Huber, P. J. (1985). Projection pursuit (with discussion).Ann. Statist., 13, 435–525.
Jones, M. C. (1983). The Projection Pursuit Algorithm for Exploratory Data Analysis.
PhD Thesis, University of Bath.
Jones, M. C. and Sibson, R. (1987). What is projection pursuit? (with discussion).J.
R. Statist. Soc. A, 150, 1–36.
Kaiser, H.F. (1958). The varimax criterion for analytic rotation in factor analysis.
Psychometrika, 23, 187–200.
Kendall, M. G. and Stuart, A. (1969).The Advanced Theory of Statistics. 3rd edn. Vol.
1. London: Griffin.
Lubischew, A. A. (1962). On the use of discriminant functions in taxonomy.
Biometrics, 18, 455–477.
Mardia, K. V. (1987). Discussion of the paper by Dr Jones and Professor Sibson.J. R.
Statist. Soc. A, 150, 22.
Morton, S. C. (1989). Interpretable Projection Pursuit.Technical Report 106.
Department of Statistics, Stanford University, Stanford, California.
Nason, G. P. (1992). Design and Choice of Projection Indices.PhD Thesis, University
of Bath.
Nason, G. P. (1994).PP3: Three-dimensional projection pursuit in S. Available
via anonymous FTP fromftp.stats.bris.ac.uk in the directory
/pub/software/pp3/ as the filepp3.shar.gz .
Posse, C. (1990). An effective two-dimensional projection pursuit algorithm.Comm.
Statist. Simul. Comput., 19, 1143–1164.
21

Swayne, D. F. and Cook, D. (1990).XGobi. Available from the StatLib archive.
Anonymous FTP fromlib.stat.cmu.edu .
Swayne, D. F., Cook, D. and Buja, A. (1991).User’s Manual for XGobi, a
dynamic graphics program for Data Analysis Implemented in the X Window
System (Release 2). Available from the StatLib archive. Anonymous FTP from
lib.stat.cmu.edu .
Tukey, J.W. (1987). Discussion of the paper by Dr Jones and Professor Sibson.J. R.
Statist. Soc. A, 150, 33.
Tukey, P. A. and Tukey, J. W. (1981). Preparation; prechosen sequences of views. In
Interpreting Multivariate Data(ed V. Barnett), pp. 189–213. Chichester: Wiley.
22

List of Figures
1 The projection pursuit algorithm. . . . . . . . . . . . . . . . . . . . 26
2 Projection pursuit solution from tetrahedral data. The data with
respect to the third projection direction is coded as the size of each
square.(Optimal projection index isM3 = 9:73) . . . . . . . . . . . . 27
3 Kernel density estimate of projection pursuit solution (1st PC) of
sailing club image .. . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Kernel density estimate of 1st PC of sailing club image . . .. . . . . 29
5 Projection pursuit solution, first PC (left), classification from density
estimate (right) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
6 Real first PC (left), classification from density estimate (right). . . . 30
23
Original Principal Component Number
Variable 1 2 3 4 5 6
1 0.026 0.020 0.062 0.664 0.165 0.064
2 0.001 0.518 0.114 0.013 0.020 0.334
3 0.079 0.119 0.672 0.003 0.126 0.001
4 0.155 0.241 0.042 0.073 0.392 0.097
5 0.462 0.008 0.005 0.086 0.291 0.148
6 0.277 0.093 0.104 0.162 0.006 0.357
Table 1: Squares of elements of principal components of tetrahedral data
Original Projection Vectors
Variable 1 2 3
1 0.014 0.763 0.025
2 0.924 0.029 0.013
3 0.017 0.026 0.896
rest 0.045 0.182 0.066
Table 2: Squares of elements of projection vectors for tetrahedral data after axis
rotation.
Channel Wavelength (� m) Designation
1 0.42 - 0.45 violet
2 0.45 - 0.52 blue
3 0.52 - 0.60 green,yellow,orange
4 0.605 - 0.625 red
5 0.63 - 0.69 red
6 0.695 - 0.75 red
7 0.76 - 0.90 near IR
8 0.91 - 1.05 near IR
9 1.55 - 1.75 near IR
10 2.08 - 2.35 near IR
11 8.50 - 13.00 thermal IR
Table 3: Spectral frequencies sensed by NERC Daedalus thematic mapper
24

Channel 2 3 4 5 6 8 9 10 11
2 1
3 0.97 1
4 0.95 0.99 1
5 0.91 0.98 0.98 1
6 0.49 0.61 0.61 0.73 1
8 0.34 0.45 0.45 0.60 0.97 1
9 0.58 0.69 0.70 0.81 0.94 0.92 1
10 0.79 0.86 0.87 0.93 0.83 0.75 0.93 1
11 0.48 0.54 0.55 0.64 0.71 0.71 0.85 0.80 1
Table 4: Correlation matrix for section of multispectral image
25

Data, X
Sphered Data
Y
Product Moment
Tensors
T,U
Power Sumss
k-statistics
k
Projection index
and derivatives
Modify projection
directions
(a,b,c)
Initial projection
directions
(a,b,c)
Yes
projection
solution
optimality ?
No
Figure 1: The projection pursuit algorithm
26

Axis 2
Axi
s 3
-1 0 1 2
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
Figure 2: Projection pursuit solution from tetrahedral data. The data with respect to
the third projection direction is coded as the size of each square.(Optimal projection
index isM3 = 9:73) .
27

Projection pursuit: first PC
Den
sity
est
imat
e
0 50 100 150 200 250
0.0
0.00
50.
010
0.01
5
Figure 3: Kernel density estimate of projection pursuit solution (1st PC) of sailing club
image
28
First PC
Den
sity
est
imat
e
0 50 100 150 200 250
0.0
0.00
40.
008
0.01
2
Figure 4: Kernel density estimate of 1st PC of sailing club image
29

Figure 5: Projection pursuit solution, first PC (left), classification from density
estimate (right)
Figure 6: Real first PC (left), classification from density estimate (right)
30