this first part of the presentation deals with the...
TRANSCRIPT

Let’s start by modeling the movement
of the points D, C and the oscillation
of the table.
O
CDG
AB
(Writing
table)
A physical implementation of a harmonograph by Karl Sims
http://www.karlsims.com/harmonograph/index.html
x1
x2
x
y1
y2
y
B
A
E
D
C
F
G
O
R
R
H
1
Modeling a Three-Pendulum Harmonograph - Part #1 – by George Lungu
This first part of the presentation deals with
the movement equations of the three pendu-
lums.
<excelunusual.com>
<excelunusual.com>
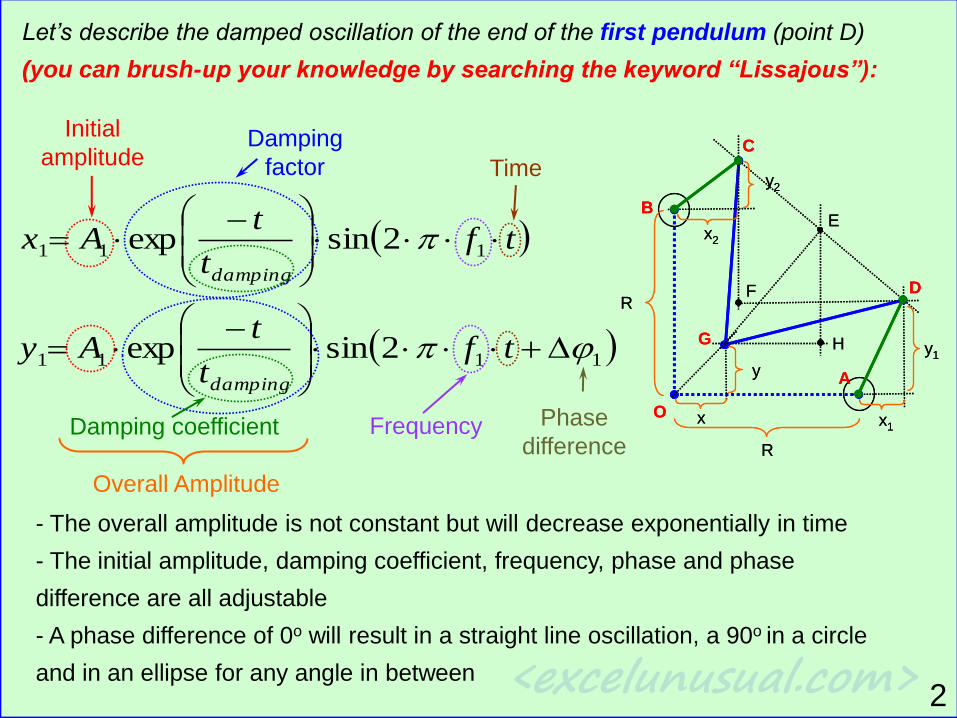
Let’s describe the damped oscillation of the end of the first pendulum (point D)
(you can brush-up your knowledge by searching the keyword “Lissajous”):
tft
tAx
damping
111 2sinexp
x1
x2
x
y1
y2
y
B
A
E
D
C
F
G
O
R
R
H
x1
x2
x
y1
y2
y
B
A
E
D
C
F
G
O
R
R
H 1111 2sinexp
tf
t
tAy
damping
Initial
amplitudeDamping
factor
Damping coefficient Frequency
Time
Phase
difference
2
Overall Amplitude
- The overall amplitude is not constant but will decrease exponentially in time
- The initial amplitude, damping coefficient, frequency, phase and phase
difference are all adjustable
- A phase difference of 0o will result in a straight line oscillation, a 90o in a circle
and in an ellipse for any angle in between

<excelunusual.com>3
Modeling rigid pendulum 2-D oscillations:
- Let’s see some examples of how the trajectories might look like. Below there are the
oscillation equations of the first pendulum
tft
tAx
damping
111 2sinexp
1111 2sinexp
tf
t
tAy
damping
Initial
amplitudeDamping
factor
Damping coefficient Frequency
Time
Overall Amplitude
- Insert a worksheet named “Pendulum_Equations” and create a table of data: X(t) and
Y(t). After that, we save several parametric plots of data to see the effect of the oscillation
parameters on the shape of the pendulum trajectories.

<excelunusual.com>4
- Let’s see several examples of effects of pendulum parameters on pendulum end trajectories:
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
YInit. Amplitude=1.2, Frequency=5, Phase Diff.=0, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
Y
Init. Amplitude=0.3, Frequency=5, Phase Diff.=0, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
Pendulum Parameter Effects:
Amplitude change

<excelunusual.com>5
Pendulum Parameter Effects:
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
YInit. Amplitude=1.2, Frequency=5, Phase Diff.=0, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
Y
Init. Amplitude=1.2, Frequency=10, Phase Diff.=0, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
Frequency change

<excelunusual.com>6
Pendulum Parameter Effects:
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
YInit. Amplitude=1.2, Frequency=5, Phase Diff.=0, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
Y
Init. Amplitude=1.2, Frequency=10, Phase Diff.=60, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
Phase Difference change

<excelunusual.com>7
Pendulum Parameter Effects:
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
YInit. Amplitude=1.2, Frequency=5, Phase Diff.=0, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
Y
Init. Amplitude=1.2, Frequency=10, Phase Diff.=90, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
Phase Difference change

<excelunusual.com>8
Pendulum Parameter Effects:
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
YInit. Amplitude=1.2, Frequency=5, Phase Diff.=0, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
Y
Init. Amplitude=1.2, Frequency=10, Phase Diff.=135, Damping
Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
Phase Difference change

<excelunusual.com>9
Pendulum Parameter Effects:
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
YInit. Amplitude=1.2, Frequency=5, Phase Diff.=0, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
Phase Difference change
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
Y
Init. Amplitude=1.2, Frequency=10, Phase Diff.=180, Damping
Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)

<excelunusual.com>10
Pendulum Parameter Effects:
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
Y
Init. Amplitude=1.2, Frequency=10, Phase Diff.=90, Damping Time=2sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
-1.3
-0.8
-0.3
0.2
0.7
1.2
1.7
-1.5 -1 -0.5 0 0.5 1 1.5
X
Y
Init. Amplitude=1.2, Frequency=10, Phase Diff.=90, Damping
Time=0.3sec.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time [s]
Dis
pla
cem
ent
X(t)
Y(t)
Damping Time change

<excelunusual.com>
2222 2sinexp
tf
t
tAx
damping
22222 2sinexp
tf
t
tAy
damping
x1
x2
x
y1
y2
y
B
A
E
D
C
F
G
O
R
R
H
x1
x2
x
y1
y2
y
B
A
E
D
C
F
G
O
R
R
H
Initial
amplitude
Damping
factor
Damping
coefficient
Frequency
Time
Phase difference
between the second
and the first pendulum
11
- The overall amplitude is not constant but will decrease exponentially in time
- The initial amplitude, damping coefficient, frequency, phase and phase
difference are all adjustable
- A phase difference of 0o will result in a straight line oscillation, a 90o in a circle
and in an ellipse for any angle in between
Overall Amplitude
Phase difference
between x and y
Coming back to the second pendulum, (point C) we can
write the oscillation equations:

<excelunusual.com>
3333 2sinexp
tf
t
tAx
damping
33333 2sinexp
tf
t
tAy
damping
For the third pendulum (the table) we can write the oscillation
equations:
x1
x2
x
y1
y2
y
B
A
E
D
C
F
G
O
R
R
H
x1
x2
x
y1
y2
y
B
A
E
D
C
F
G
O
R
R
H
Initial
amplitude
Damping
factor
Damping
coefficient
Frequency
Time
Phase difference
between the third and
the first pendulum
12
- The overall amplitude is not constant but will decrease exponentially in time
- The initial amplitude, damping coefficient, frequency, phase and phase
difference are all adjustable
- A phase difference of 0o will result in a straight line oscillation, a 90o in a circle
and in an ellipse for any angle in between
Overall Amplitude
Phase difference
between x and y