the kite geometry manipulator slava pranovich tu/e dept. math. and computer science
TRANSCRIPT
The KITE geometry manipulator
Slava Pranovich
TU/e
Dept. Math. and Computer Science
Introduction
• Architectural design
• 2D drawing
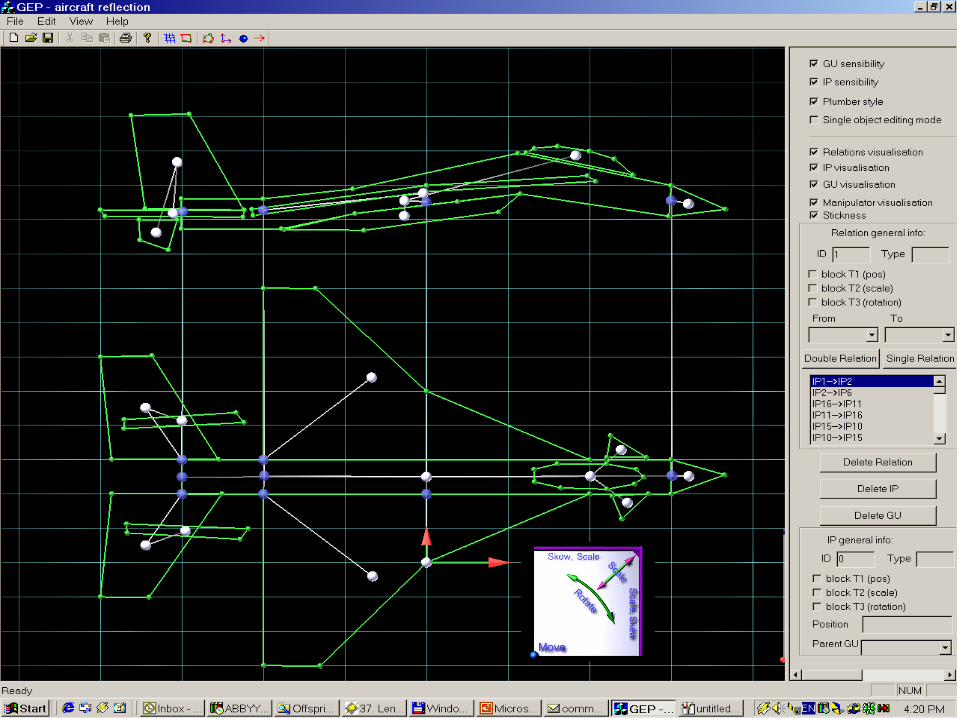
• Geometrical manipulator
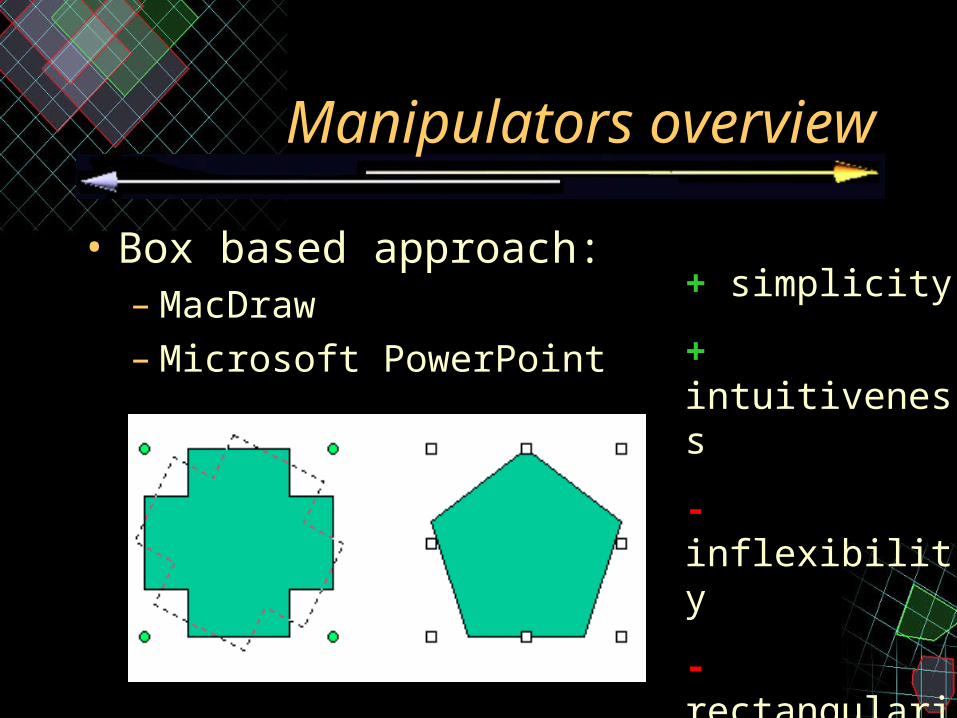
Manipulators overview
• Box based approach:– MacDraw– Microsoft PowerPoint
+ simplicity
+ intuitiveness
- inflexibility
- rectangularity
Manipulators overview
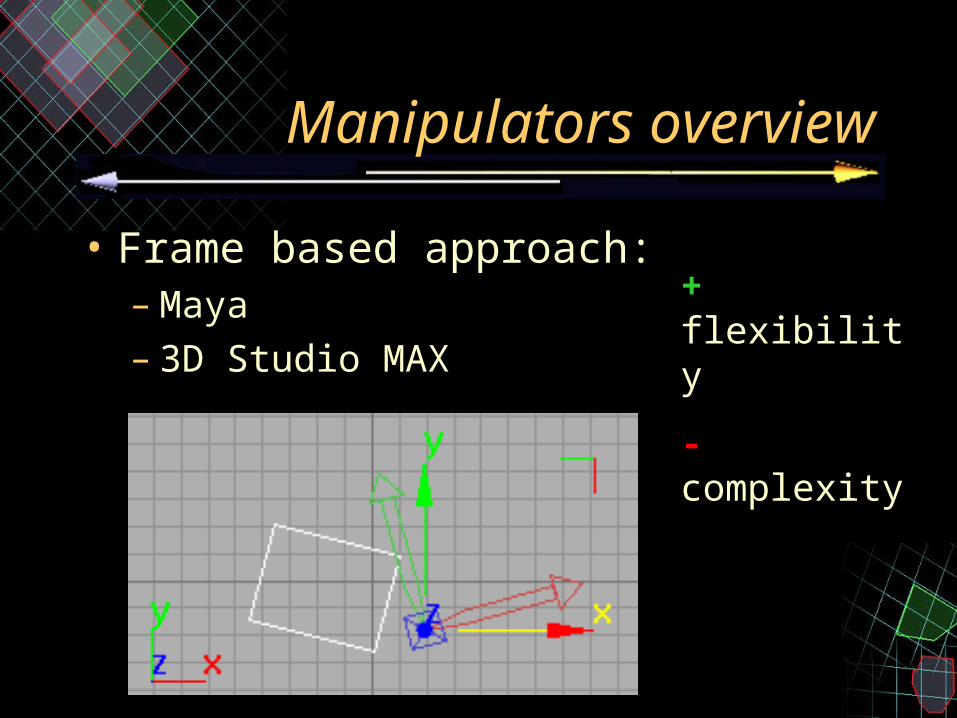
• Frame based approach:– Maya– 3D Studio MAX
+ flexibility
- complexity
KITE: the aim
• Efficiency
• Flexibility
• Enhanced set of transformations
• Direct manipulation style of interaction

KITE

S caling
S ca ling
S kew ingS kew ing
KITE
Video…
Tests
• Ten users
• Three types of manipulators
• Five different tasks
• Evaluation criteria
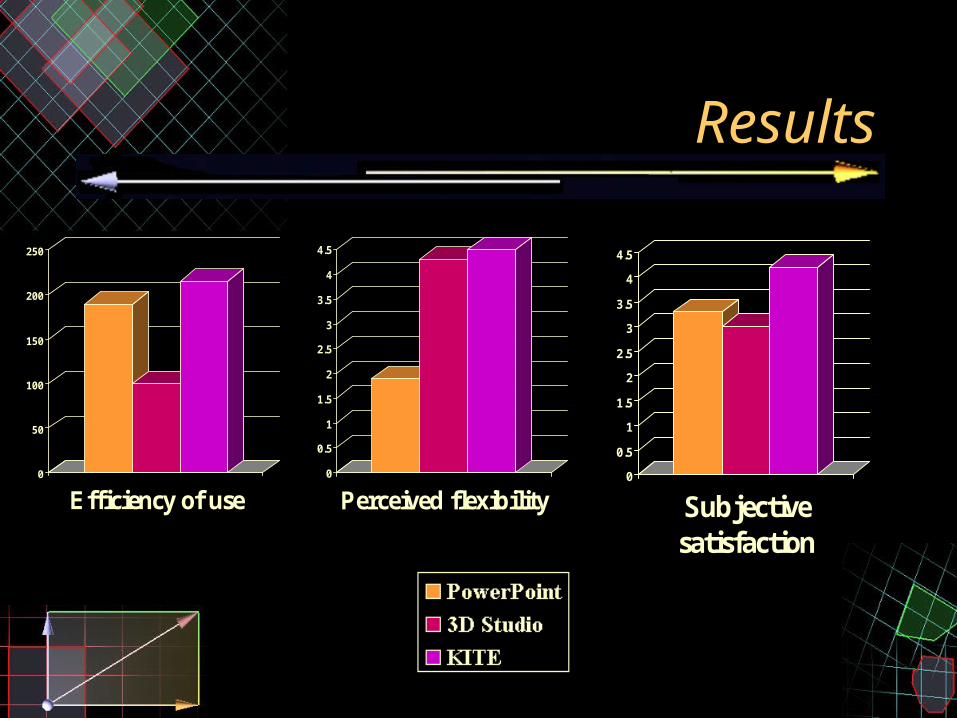
Results
0
50
100
150
200
250
Efficiency of use0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Perceived flexibility0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Subjectivesatisfaction
Conclusion
• KITE combines the benefits:– Efficiency– Flexibility
• Enhanced set of transformations is provided
• Users like KITE most
Thanks
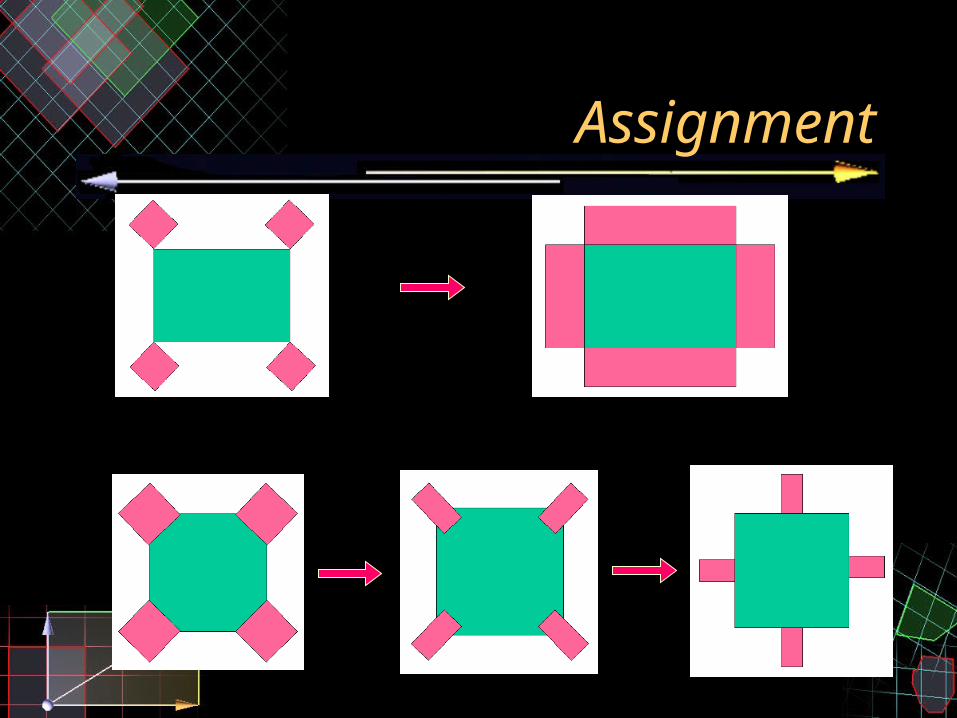
Assignment
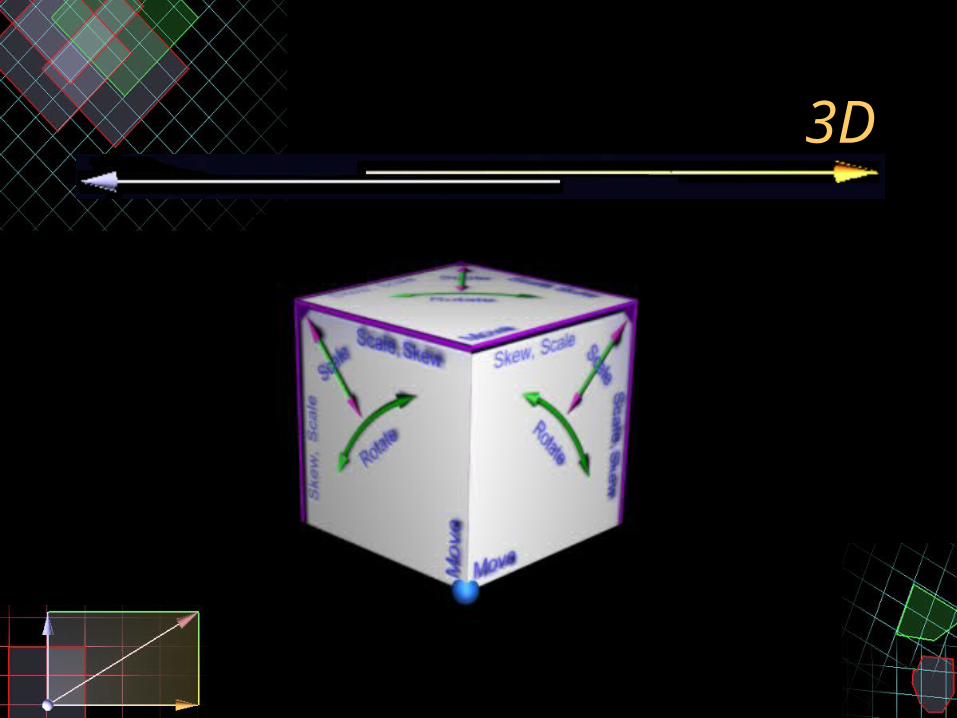
3D