the estimation of trust - agreement-technologies.eu · the estimation of trust ... – case base...
TRANSCRIPT

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Using Contextual Information to TuneUsing Contextual Information to Tune the Estimation of Trust
Joana Urbano, Ana Paula Rocha, Eugénio Oliveira/ ld d d h d d dLIACC, DEI / Faculdade de Engenharia, Universidade do Porto
{joana.urbano, arocha, eco}@fe.up.pt
December 16th 2009 Workshop on Trust Technologies (WG5) inDecember 16 2009, Workshop on Trust Technologies (WG5) in Cyprus
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Outline
M i i f M d li C
Outline
• Motivation for Modeling Context
• Models in AnalysisC t t M t F k M d l– Context Management Framework Model
– Context Space and Reference Contexts Model (CSRC)
– Contextual Fitness (CF) ModelContextual Fitness (CF) Model
• Experimentation
• Other Related WorkOther Related Work
• Conclusions

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Trust is SituationalTrust is Situational
• I may trust my brother to drive me to the airport, I most certainly would not trust him to fly the plane (Marsh, 1994)
• A person trusting Bob as a good car mechanic will not automatically trust him also in undertaking heart surgeries (…) [but] he probably could be
• A high tech company may fear to select a partner from a country of origin
quite goodin repairing motorcycles (Tavakolifard, 2009)
• A high tech company may fear to select a partner from a country of origin without high technology tradition, even though this partner has proved high quality work in the desired task in the recent past (Urbano, 2009)

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Motivation for Modeling Context
f ll h d
Motivation for Modeling Context
• Management of situation‐aware trust – not all the past evidences are equally relevant for future interactions
• Management of newcomers – the use of the similarities between trustees• Management of newcomers – the use of the similarities between trustees and situations allows to infer trustworthiness during the first encounter
• Bootstrapping of unanticipated situations – by inferring the missing pp g p y g ginformation from similar situations
• Management of intuitive fear – the use of additional environmental information needed to the decision process
• Reduction of the complexity of management of trust relationships (Neisse 2007)(Neisse, 2007)
• Allowance of the transitivity of trust (cf. Christianson, 1996)

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Models Presented
k
Models Presented
• Context Management Framework– PhD proposal by Mozhgan Tavakolifard
– Norwegian University of Science and Technologyg y gy
• Context Space and Reference Contexts– PhD thesis of Martin Rehák
– Gerstner Laboratory of Czech Technical University
• Contextual Fitness– PhD proposal by Joana Urbano
– Universidade do Porto
All three models can be used complementary to existing CTR models

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Context Management Framework• Trust relations in one domain are used to infer trust relations in similar domains
Context Management FrameworkTrust relations in one domain are used to infer trust relations in similar domains
• An ontology allows the representation of the similarity between domains
• The ontology is based on the context‐specific trust ontology by Goldbeck at al.
• A situation is represented as a set of contextsas a set of contexts
• Each context has a set of local contexts (aspects)
Th i il it b t• The similarity between situations is a weighted sum of the similarity between contextsbetween contexts
• The similarity between contexts is a weighted sum of the similarity betweenof the similarity between local contexts

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Context Management FrameworkContext Management Framework
E ti ti f t t i ti i t dEstimation of trust in unanticipated situations
• Remembering – the query is d h N i ilcompared to the N most similar
cases retrieved form the case base
• Reusing – a trust value is predicted using the Solution Transformation module
• Learning – a new case is created from the query and the predicted value

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Context Management FrameworkContext Management Framework
• Relational Similarity– Uses SimRank, an algorithm for measuring general objects similarity
R i l i d i i il bj l d i il– Rationale → in many domains, similar objects are related to similarobjects
• Objects a and b are similar if they are related to objects c and d, respectively, and cand d are themselves similar
• Limitations of the ModelSi R k ti l li k ti– SimRank rationale relies on a weak assumption
• In more complicated cases, the similarity of two context models is in itself context dependent (Tavakolifard, 2009)
• The authors relegate this question to future work

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Context Management FrameworkContext Management Framework
/Has / Does Not Have• Management of situation‐aware trust
– Rule‐Based Reasoning (future work)– Rule‐Based Reasoning (future work)
• Management of newcomersBootstrapping of unanticipated situations
– Case Base Reasoning and Relational Similarity (limited to simple cases)
• Allowance of the transitivity of trustØ– Theoretically (extension of the Subjective Logic Model by JØsang, 2001)
• Management of intuitive fear – NoNo
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Context Space and Reference Contexts
h
Context Space and Reference Contexts
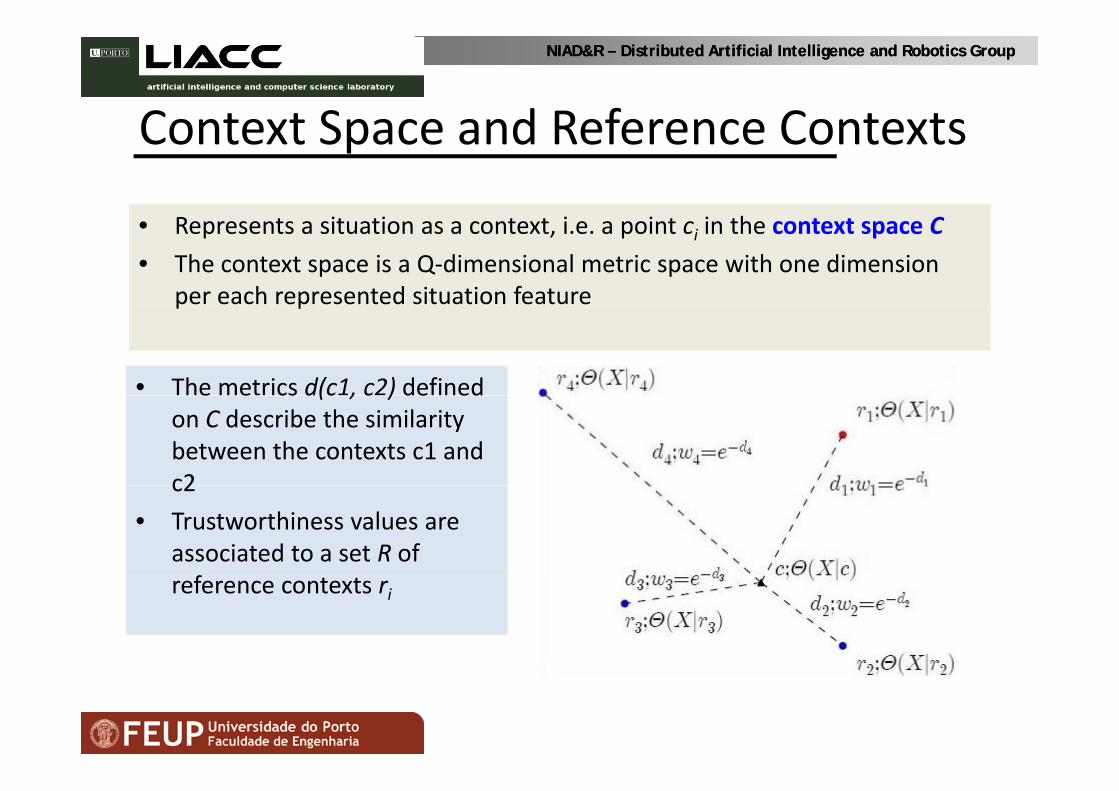
• Represents a situation as a context, i.e. a point ci in the context space C
• The context space is a Q‐dimensional metric space with one dimension per each represented situation featurep p
• The metrics d(c1, c2) defined e e cs d(c , c ) de edon C describe the similarity between the contexts c1 and c2c2
• Trustworthiness values are associated to a set R of freference contexts ri

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Context Space and Reference ContextsContext Space and Reference Contexts
• Placement of Reference Contexts:– Regular grid covering the space C in each dimension
Adaptive placement of reference in areas with high density of diverse– Adaptive placement of reference in areas with high density of diverse observations (e.g. Leader‐Follower clustering algorithm)
• Limitations of the Model:– A context space with multiple dimensions can lead to an exponential
number of reference contexts to keep up for each target agent
– It only works with CTR systems that aggregates evidences using weighted meansweighted means
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Context Space and Reference ContextsContext Space and Reference Contexts
/Has / Does Not Have• Management of situation‐aware trust
– Relevance of evidences depends on similarity distance to reference contexts– Relevance of evidences depends on similarity distance to reference contexts
• Bootstrapping of unanticipated situations– By distributing the evidences through the context space
• Allowance of the transitivity of trustManagement of intuitive fearM t fManagement of newcomers
– No
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Contextual FitnessContextual Fitness
Main Purpose• Management of situation‐aware trust
Bootstrapping of unanticipated situationsBootstrapping of unanticipated situations – By managing of stereotypes
• Management of newcomersManagement of newcomersManagement of intuitive fear
– Through clustering of organizational characteristics and argumentation (future work)
• Allowance of the transitivity of trust– N/A

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Contextual Fitness
l h
Contextual Fitness
Algorithm:
1. Conceptual clustering over trustee past evidences
Stereotypes are extracted automatically
p
2. Stereotype extraction for each cluster
3 l i f i il i bFIc – measures the increase in the frequency of a category c within a community (Paliouras3. Analysis of similarity between
business need and each stereotype
a category c within a community (Paliouras, 1999)
4. Derivation of a contextual fitness value
5 Aggregation with
Stereotype: Agent X, null, null, low, false
fabric quant dtime5. Aggregation with
trustworthiness value computed by traditional CTR
CFP: chiffon, 1080000, 7

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Contextual Fitness C t I l t ti
f h (b
Contextual Fitness – Current Implementation
• If stereotype matches negative response to current situation (business needs), the trustee proposal is put in a does_not_fit set, and probably is not considered as a valid proposal
Stereotype: Agent X, null, null, low, false CFP: chiffon, 1080000, 7
fabric quant dtime
• Valid trustee proposals are selected using “traditional” CTR
fabric quant dtime
• Ongoing work:– Positive stereotype helps to discriminate trustee partners with ability in a
specific issuep– Confidence on stereotype shall be included in the contextual fitness value– Contextual fitness value as a real number in [0, 1]

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Experiments C t t l Fit (1)
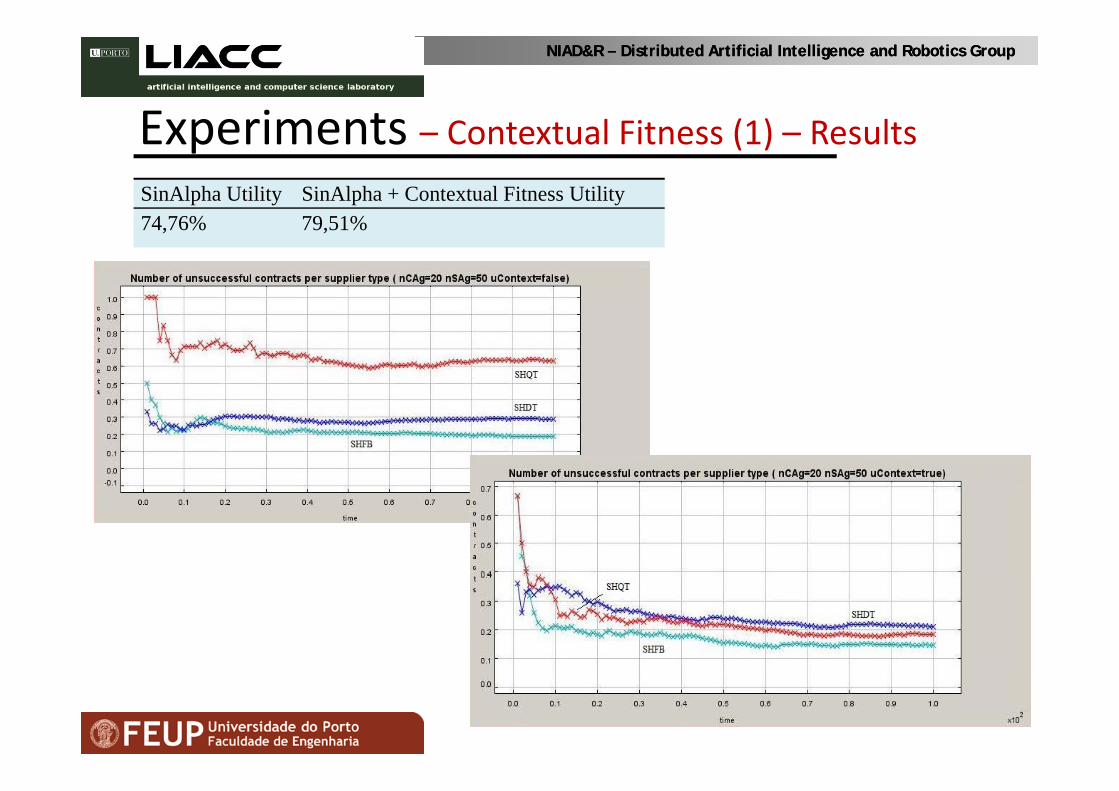
• Experiments with and without Contextual Fitness
Experiments – Contextual Fitness (1)
Experiments with and without Contextual Fitness
Parameter ValueF b i {Chiff C tt V il }FabricsQuantities
{Chiffon, Cotton; Voile}{Low, Medium, High}
Delivery Time {Low, Medium, Big}# buyers 20# of sellers 50Types of sellers Chosen upon a uniform distribution over the types yp p yp
{“SHQT”, “SHDT”, “SHFB”}# rounds 100# runs per experiment 10
Supplier Type
Description
SHQT Fails high quantities 75% of the time# runs per experiment 10 g q
SHDT Fails low delivery times 75% of the time
SHFB Fails a given fabric75% of the time
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Experiments C t t l Fit (1) R ltExperiments – Contextual Fitness (1) – Results
SinAlpha Utility SinAlpha + Contextual Fitness Utility74 76% 79 51%74,76% 79,51%

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Experiments C t t l Fit (2)
f h f l
Experiments – Contextual Fitness (2)
• Configuration: each trustee fails 5% contracts in normal situations and 95% contracts where CFP matches handicap
• We add another approach:• We add another approach:– M. Rehak, M. Gregor, M.
Pechoucek. Multidimensional context representations for situational trust
R f t tThe context space is a Q‐dimensional – Reference contexts were
places regularly
pmetric space with one dimension per each represented situation feature

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Experiments C t t l Fit (2) R ltExperiments – Contextual Fitness (2) – Results
20%
25%
10%
15%
20%Best Case
SA
5%
10% SA
SA + CF
RC0%
Average Violated Contracts
RC
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Contextual Fitness Future Work
• Improve stereotype
Contextual Fitness – Future Work
management
• First‐encounter (newcomers)
give guarantees
First encounter (newcomers)Intuitive Fear
– Categorize trustee characteristics
team is specialized
g(e.g. country of origin, annual turnover, location of facilities) using clustering and associate
team ready?
in 15 daysbehaviors to these categories
– Uses disseminated information (automatic Web information
y
…
(automatic Web information extraction)
– Use argumentation

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Other Related Work
l b d d l h b h
Other Related Work
• Angela Fabregues, Jordi Madrenas‐Ciurana, Carles Sierra, John Debenham, Supplier Performance in a Digital Ecosystem
• Achim Rettinger Matthias Nickles Volker Tresp A Statistical Relational• Achim Rettinger, Matthias Nickles, Volker Tresp, A Statistical Relational Model for Trust Learning
• Achim Rettinger, Matthias Nickles, and Volker Tresp. Learning initial trust g , , p gamong interacting agents
• Ricardo Neisse, Maarten Wegdam, Marten van Sinderen, and Gabriele Lenzini. Trust management model and architecture for context‐aware service platforms
• Changli Zhang Jian Wu and Zhengguo Hu Trust contexts modeling• Changli Zhang, Jian Wu, and Zhengguo Hu. Trust‐contexts modeling, organization and trust estimation on the web

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
References• Bruce Christianson and William S. Harbison. Why isn’t trust transitive? In Proceedings of the
International Workshop on Security Protocols, pages 171–176, London, UK, 1997
Referencesp y , p g , , ,
• S. Marsh. Formalising trust as a computational concept, 1994.
• G. Paliouras, V. Karkaletisis, C. Papatheodorou, and C. Spyropoulos. Exploiting learning techniques for the acquisition of user stereotypes and communities. In UM ’99: Proceedings of the seventh international conference on User modeling, pages 169–178, Secaucus, NJ, USA, 1999
• M. Rehak, M. Gregor, M. Pechoucek. Multidimensional context representations for situational trust. IEEE Workshop on Distributed Intelligent Systems: Collective Intellig. and Its Applications,, 0:315–320, 2006.
• M. Rehak and M. Pechoucek. Trust modeling with context representation and generalized identities. In Matthias Klusch, Koen V. Hindriks, Mike P. Papazoglou, and Leon Sterling, editors, CIA, volume 4676 of Lecture Notes in Computer Science, pages 298–312. Springer, 2007.
• Martin Rehak Michal Pechoucek Martin Grill and Karel Bartos Trust based classifier combination for• Martin Rehak, Michal Pechoucek, Martin Grill, and Karel Bartos. Trust‐based classifier combination for network anomaly detection. In Matthias Klusch, Michal Pechoucek, and Axel Polleres, editors, Cooperative Information Agents XII, volume 5180 of LNCS, pages 116–130. Springer, 2008.
• R. Neisse, M. Wegdam, M. Sinderen, and G. Lenzini. Trust management model and architecture forR. Neisse, M. Wegdam, M. Sinderen, and G. Lenzini. Trust management model and architecture for context‐aware service platforms. In On the Move to Meaningful Internet Systems 2007: CoopIS, DOA, ODBASE, GADA, and IS, LNCS, chapter 47, pages 1803–1820. 2009.
• A. Rettinger, M. Nickles, and V. Tresp. A statistical relational model for trust learning. In AAMAS ’08, pages 763–770, Richland, SC, 2008. IFAAMAS.

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
References• A. Rettinger, M. Nickles, and V. Tresp. Learning initial trust among interacting agents. In Matthias
Klusch, Koen V. Hindriks, Mike P. Papazoglou, and Leon Sterling, editors, Cooperative Information
References, , p g , g, , p f
Agents XI, volume 4676 of LNCS, chapter 22, pages 313–327. Heidelberg, 2007.
• M. Tavakolifard, S. J. Knapskog, and P. Herrmann. Cross‐situation trust reasoning. In Web Intelligence and Intelligent Agent Technology, 2008. WI‐IAT ’08. IEEE/WIC/ACM International Conference on, volume 3, pages 67–71, December 2008.
• Mozhgan Tavakolifard, Peter Herrmann, and Pinar Öztürk. Analogical trust reasoning. In Trust Management III, chapter 10, pages 149–163. 2009.
M h T k lif d S i J K k d P t H T t t f bilit i il• Mozhgan Tavakolifard, Svein J. Knapskog, and Peter Herrmann. Trust transferability among similar contexts. In Q2SWinet ’08: Proceedings of the 4th ACM symposium on QoS and security for wireless and mobile networks, pages 91–97, New York, NY, USA, 2008. ACM.
• C Zhang J Wu and Z Hu Trust‐contexts modeling organization and trust estimation on the webC. Zhang, J. Wu, and Z. Hu. Trust contexts modeling, organization and trust estimation on the web. In CISW ’07: Proceedings of the 2007 ICCISW, pages 612–615, USA, 2007. IEEE Computer Society.
• A. Fabregues, J. Madrenas‐Ciurana, C. Sierra, and J. Debenham. Supplier performance in a digital ecosystem. pages 459–464, June 2009y p g
• Audun Jøsang. A logic for uncertain probabilities. Int. J. Uncertain. Fuzziness Knowl.‐Based Syst., 9(3):279–311, June 2001.
• J. Urbano, A. Rocha, and E. Oliveira. Computing confidence values: Does trust dynamics matter? In Progress in Artificial Intelligence, pages 520–531. 2009.

NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Thank you!
[email protected]@fe.up.pt