the design and making of a humanoid robotic...
TRANSCRIPT

The design and making of a humanoid robotic hand
presented by
Tian Li
Research associate
Supervisor’s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng
Project 2: Mixed Society of People, Virtual Humans, and Social Robots in Telepresence
BeingTogether Centre
Date of Presentation : 10 October 2017

BTC Task 2.4: Realistic Object
Manipulation by a Social Robot in a
Social Context• Integration in a social robot of an articulated hand for
grasping different types of objects.
• Vision-based detection, recognition and localisation of different
types of objects
• Determination of a strategy for reaching and grasping the object
in a human-like way
2

Target
• Static - Looks like human hand
Solution: Use silicon artificial skin
• Dynamic - Moves like human hand
Solution: design and making of a
humanoid robotic hand
Criteria: Dimensions, Degree of
freedom(DOF), Joints structure and
motion range, move accuracy and
speed.
• Other requirement – light weight, low
cost, easy to make, easy to control

Related works
[1] Shadow hand: https://www.shadowrobot.com/products/dexterous-hand
[2] Zhe Xu and Emanuel Todorov, “Design of a highly biomimetic anthropomorphic robotic hand towards
artificial limb regeneration” 2016 IEEE International Conference on Robotics and Automation (ICRA)
[3] Bebionic hand: http://bebionic.com/the_hand
40 actuators(20 DOFs) Highly biomimetic Robust and compact
Shadow Hand[1] Xu Zhe hand[2] Bebionic hand[3]

How does hand work – mechanism
http://nimblevr.com/latest/doc/handModel.html
Metacarpal-phalangeal joint (MCP) Proximal interphalangeal joint (PIP)
Distal interphalangeal joint (DIP) Carpal-metacarpal joint (CMC)
Metacarpal-phalangeal joint (MCP) Interphalangeal joint (IP)
15 movable joints, 20DOFs, 27 bones

Mechanism design - interlock
https://en.wikipedia.org/wiki/File:Joint.svg

How does hand work – actuation “Fingers do not contain muscles (other than arrector pili). The muscles that
move the finger joints are in the palm and forearm. The long tendons that
deliver motion from the forearm muscles may be observed to move under the
skin at the wrist and on the back of the hand.” (From Finger - Wikipedia)
https://answersingenesis.org/human-body/our-index-finger/

Actuation design – cable-driven
https://answersingenesis.org/human-body/our-index-finger/
• Total DOFs reduced from 20 to 6• One cable control 3 joints• Thumb have 2 cables

Nadine hand conclusion • Humanlike mechanical design – Dimensions, joints, motion
factors
• Simple actuation method - Cable driven, six actuators
• 3D printable – Low cost, fast, light, motion range control
• Single model with interlock joint – No assemble
required
• Artificial skin compatible

Nadine hand - originality
[1]Xu, Zhe, Vikash Kumar, and Emanuel
Todorov. "A low-cost and modular, 20-DOF
anthropomorphic robotic hand: design,
actuation and modeling." Humanoid Robots
(Humanoids), 2013 13th IEEE-RAS
International Conference on. IEEE, 2013.
[2] Zhe Xu and Emanuel Todorov, “Design of a highly
biomimetic anthropomorphic robotic hand towards
artificial limb regeneration” 2016 IEEE International
Conference on Robotics and Automation (ICRA)
[3] http://inmoov.fr/
Single
interlocked
model

Servo bed design
• HS-5070MH 23.6 x 11.6 x 29mm, 12.5g, 3.8 kg.cm
• HK15298B 117 x 20 x 80mm 66g, 20 kg.cm
Magnenat Thalmann, N., Tian, L., & Yao, F. (2017). Nadine: A Social Robot that Can Localize
Objects and Grasp Them in a Human Way Frontiers in Electronic Technologies (pp. 1-23):
Springer.

ComparisonsHand Developer Mass(g) Size (length x
width x
thickness, mm)
Number
of
Joints
DOF Number
of
Actuators
Actuatio
n
Method
Material
Nadine
hand
NTU IMI 205 147 x 70 x
13(without
artificial skin)
15 6 6 DC
Motor -
Tendons
3D print ABS
Shadow
Hand
SHADOW
ROBOT
COMPANY
>2000 200 x 98 x 27 24 20 40 pneumati
c motor -
Tendons
Metal + plastic
Xu Zhe’s
hand
Xu Zhe 942 No data
(Human size)
15 10 10 DC
Motor -
Tendons
3D print ABS +
Laser-cut tissues
(rubber)
Bebionic
(2014)
RSL
steeper
>550 ~200 x 92 x 50 11 6 5 DC
Motor -
Lead
Screw
Metal
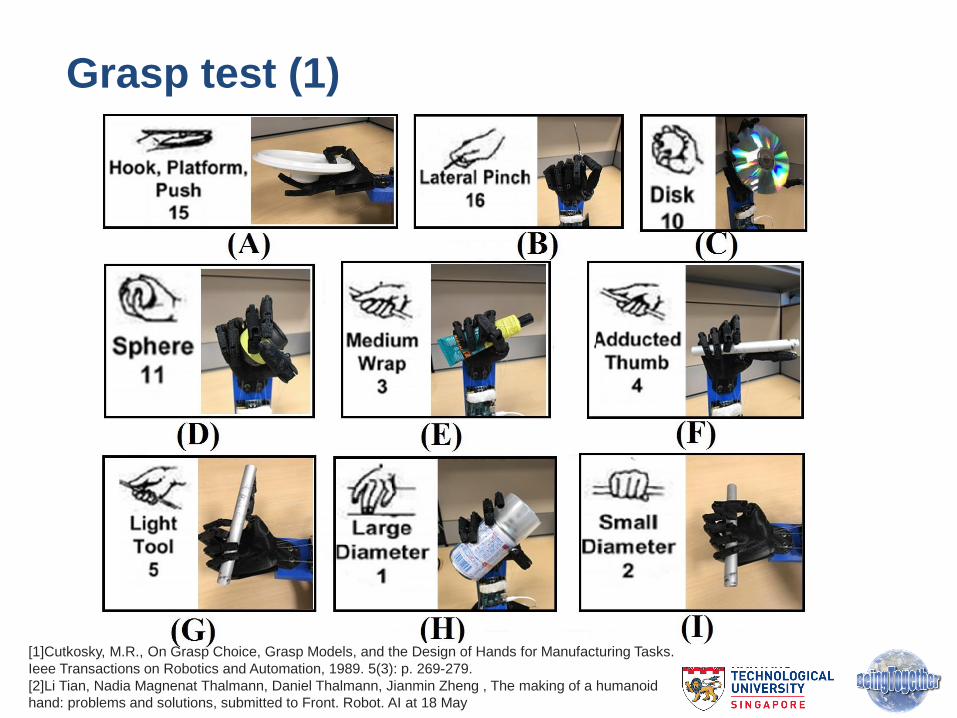
Grasp test (1)
[1]Cutkosky, M.R., On Grasp Choice, Grasp Models, and the Design of Hands for Manufacturing Tasks.
Ieee Transactions on Robotics and Automation, 1989. 5(3): p. 269-279.
[2]Li Tian, Nadia Magnenat Thalmann, Daniel Thalmann, Jianmin Zheng , The making of a humanoid
hand: problems and solutions, submitted to Front. Robot. AI at 18 May

Grasp test (2)
[1]Cutkosky, M.R., On Grasp Choice, Grasp Models, and the Design of Hands for Manufacturing Tasks.
Ieee Transactions on Robotics and Automation, 1989. 5(3): p. 269-279.
[2]Li Tian, Nadia Magnenat Thalmann, Daniel Thalmann, Jianmin Zheng , The making of a humanoid
hand: problems and solutions, submitted to Front. Robot. AI at 18 May
The test is based on Cutkosky’s hand taxonomy. It shows our robotic hand
can grasp in all 16 grasp gestures.

Grasp test demos

Thank you!
Q&A