the damped driven pendulum and applicationscmyles/phys5306/talks/2003/driven_dam...the damped driven...
TRANSCRIPT
The damped driven pendulum and applications
Presentation by,Bhargava Kanchibotla,Department of Physics,Texas Tech University.

Overview
The Dynamics of a simple pendulum.Dynamic steady state.Cases of dynamic steady state.ApplicationsConclusions

The Dynamics of Simple Pendulum
The angular acceleration of the pendulum is produced by a gravitational torque Corresponding to the equation of motion
φsinmgR
0sin2
22 =+ φφ mgR
dtdmR
Continued….
Small angular displacement linearizes the problem by making the torque proportional to the displacement and the motion is simple harmonic with characteristic frequency
⎟⎟⎠
⎞⎜⎜⎝
⎛=
Rg
0ω
Continued…..
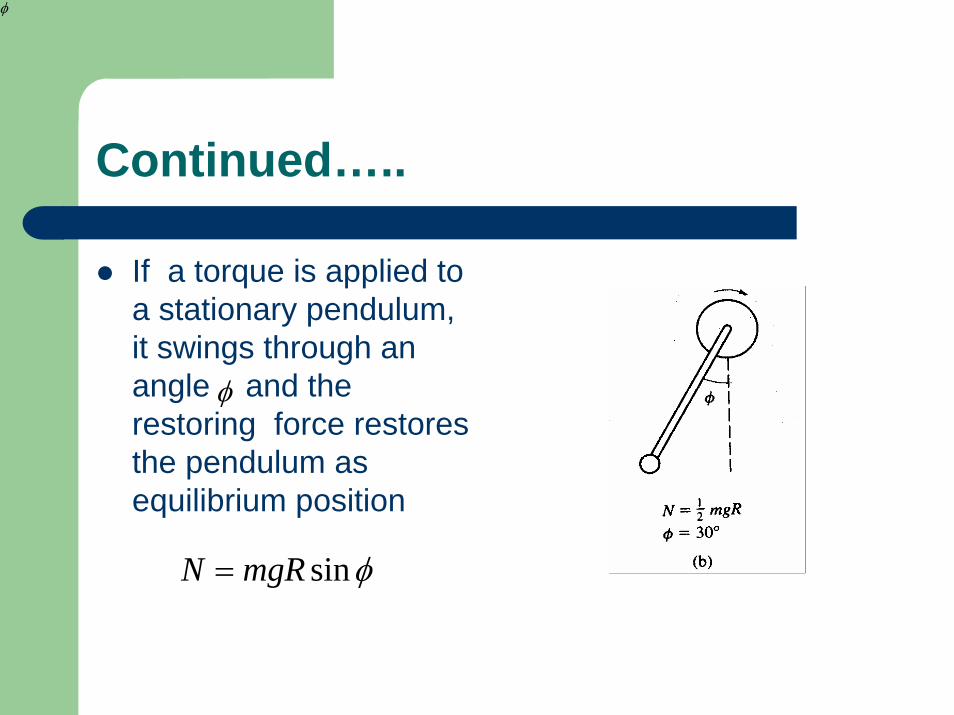
If a torque is applied to a stationary pendulum, it swings through an angle and the restoring force restores the pendulum as equilibrium position
φ
φ
φsinmgRN =

Continued….
Greater the torque, the larger the angle and there is a critical torqueThe critical torque assumes a value 90 degrees. If N exceeds the critical value, then the applied torque becomes larger then the restoring torque
φ
cN

Continued….
Assuming the damping force, the equation motion of the pendulum is given by the following equation adding the restoring and the damping torque as
φφηφ sin2
22 mgR
dtd
dtdmRN ++=

Dynamic Steady State
When a constant torque is applied to the pendulum at rest, there will be a initial transient behavior that eventually settles down to a dynamic steady state after the transients die out. There are several cases of this dynamic steady state.

Static Steady state
1. For low applied torque, there is a steady state
in which all the time derivatives vanish after the initial oscillations have dies out.
CNN ≤
φsinCNN =

Dynamics steady state
For under damped motion, with a constant applied torque, we have the following equation as below
The torque has specific values at four particular angles
2
22sin
dtdmRmgRNtorque φφ =−=

Continued…
If the applied torque exceeds the critical torque, the motion will be continuously accelerated rotation and the pendulum increases its energy as the time goes. The angular speed also increases, but with fluctuations that repeat every cycle as indicated in the figure

Continued…..
When damping is present withand the angular speed increases untill
the damping term approaches the applied torque.The acceleration fluctuates around an average that is zero and the pendulum undergoes a quasi static motion
0ωω <<c
CNN >

Quasi Static motion
This has the following equation
and the solutions are as follows φφ
ωsin1
+=dtd
NN
CC
CNforN <= 0ω
cC
C NforNNN
>⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛= 1
2
ωω
CCC
NforNNN
>>⎟⎟⎠
⎞⎜⎜⎝
⎛= ωω

Quasi Static Motion
The solutions of the quasi static motion can be plotted as shown in the figure

Quasi Static Motion
The cyclic variations in angular speed for points A and B are in this plot.At Point A, the applied torque has a value and the net torque varies between and
CNN 2.1=
CN2.0
CN2.2

Continued….
For point B, we have so the net torque
varies between and producing more regular variations in angular speed.
CNN 2=
CN
CN3

Continued…
For a negligible damping caseWe have the following solutions for all valuses
of N
00 ωωη >>→ cand
CNforN≤= 0ω
NforNN
CC
≤⎟⎟⎠
⎞⎜⎜⎝
⎛= 0ωω

Continued……
These solutions are plotted as a graph.It is seen that the system exhibits hyteresisWhen the torque is increased for the pendulum stabilized at the angle (pi) satisfying the relation
CNN <
φsinCNN =

Continued….
When N reaches the critical torque the angular speed jumps to the value and then rises linearly with further increase in NFor decreasing torque, remains proportional to N all the way to the origin as shown.
ω
Cω
Continued….
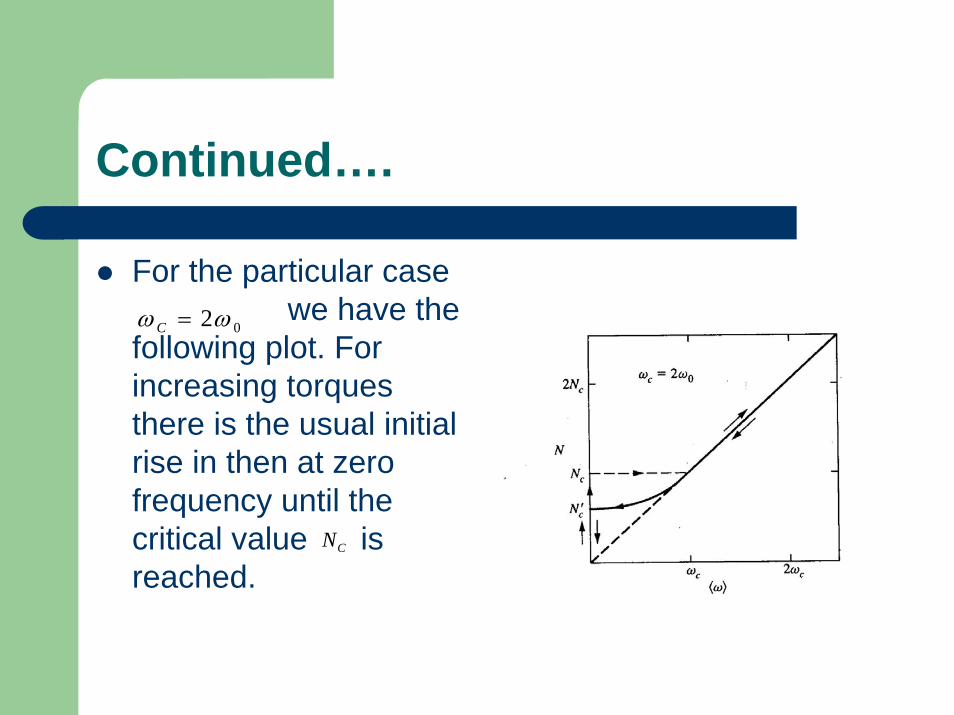
For the particular case we have the
following plot. For increasing torques there is the usual initial rise in then at zero frequency until the critical value is reached.
02ωω =C
CN

Continued….
For decreasing torques. There is a hyteresis with the zero average frequency reached at a torque which is less than .'
CN CN

Application
The damped driven pendulum equation has a particularly important applications in solid state physics When 2superconductorsin close proximity with a thin layer of insulating material between them, the arrangement constitutes a Joseph son junction,

Continued….
Current exceeding the value is accompanied by the presence of a voltage, and the plots of current I versus voltage V for the junction exhibit hysteresis.The Joseph son junction satisfies the same differential equation as the damped oscillator with the current playing the role of the torque, the voltage playing the role of the average angular speed, the capacitance acting like a moment of inertia and the electrical conductance serving as the viscosity.

Conclusion
The damped driven pendulum is a very important system that has a very significant application in the field of solid state physics. Also the system is very important to be understood as it has a lot of physics involved in