the case where there is no net effect of the forces...
TRANSCRIPT

The case where there is no net effect of the
forces acting on a rigid body
Outline:
Introduction and Definition of Equilibrium
Equilibrium in Two-Dimensions
Special cases
Equilibrium in Three-Dimensions
Constraints and Determinacy
ENGR 1205 1 Chapter 7
We will now use concepts from previous chapters to
solve static equilibrium problems
Requirements for equilibrium:
For a RB in equilibrium, the external forces impart no
translation or rotation motion
So, the RB (Rigid Body) is not moving, or is moving at
a constant velocity (translational and rotational)
ENGR 1205 2 Chapter 7
2D, is relatively straightforward since Fz = 0
so, Mx = 0, My = 0 therefore Mz = Mo
We use:
since the location of the origin is arbitrary, we can
also say ∑ Mo = ∑ MA = ∑ MB = ∑ MC = etc = 0
we have multiple ∑ M equations that we can use
in general, we have 3 equations in total, and we can
solve for up to 3 unknowns
1 fixed support, or 2 rollers and a cable, or 1 roller
and 1 pin in a fitted hole
ENGR 1205 3 Chapter 7
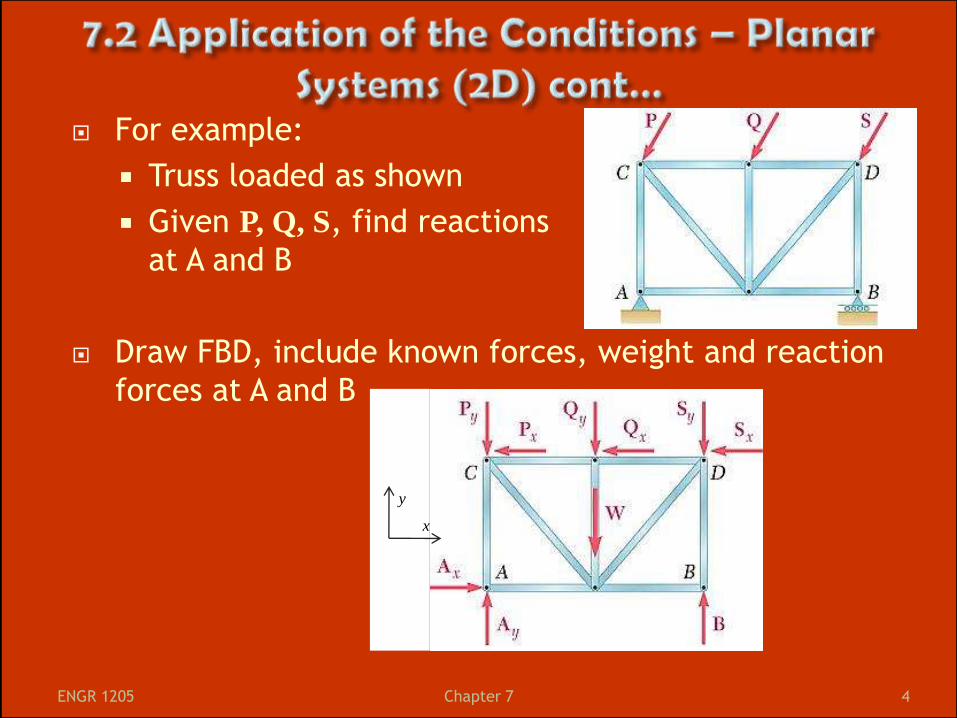
For example:
Truss loaded as shown
Given P, Q, S, find reactions
at A and B
Draw FBD, include known forces, weight and reaction
forces at A and B
y
x
ENGR 1205 4 Chapter 7
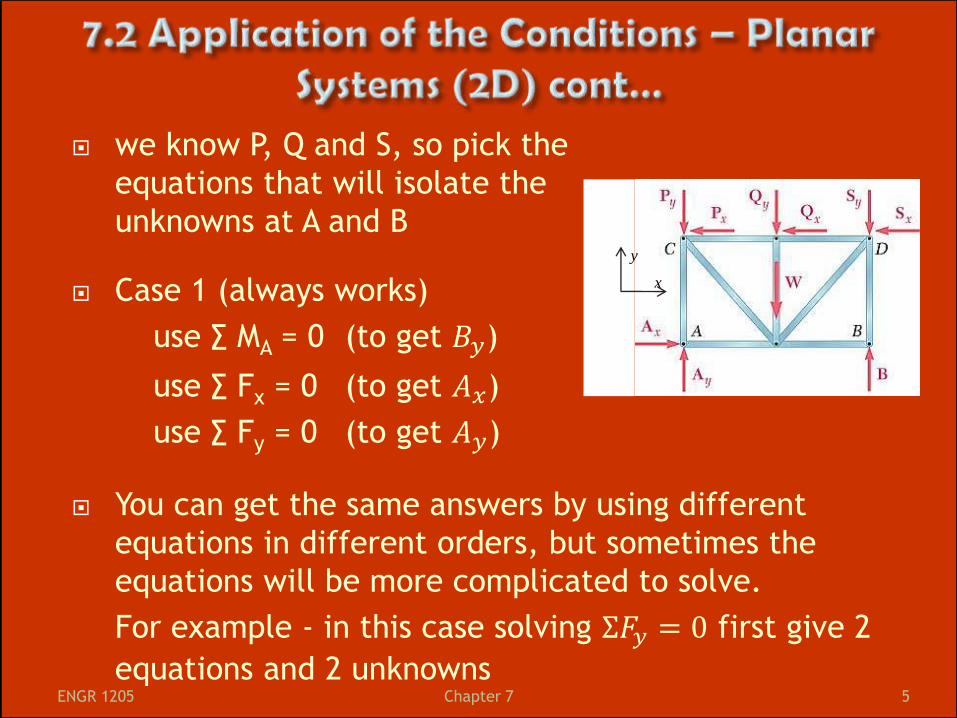
we know P, Q and S, so pick the
equations that will isolate the
unknowns at A and B
Case 1 (always works)
use ∑ MA = 0 (to get 𝐵𝑦)
use ∑ Fx = 0 (to get 𝐴𝑥)
use ∑ Fy = 0 (to get 𝐴𝑦)
You can get the same answers by using different
equations in different orders, but sometimes the
equations will be more complicated to solve.
For example - in this case solving Σ𝐹𝑦 = 0 first give 2
equations and 2 unknowns
y
x
ENGR 1205 5 Chapter 7

you can use 3 other equations if you wanted …
Case 2: ∑ Fx = 0 ∑ MA = 0 ∑ MB = 0
- valid so long as A and B aren’t on the same line parallel
to the y-axis
Case 3: ∑ Fy = 0 ∑ MA = 0 ∑ MB = 0
- valid so long as A and B aren’t on the same line parallel
to the x-axis
note: since A and B are often where ground rxn forces
apply, these 3 eqns are generally not a good choice
Case 4: ∑ MA = 0 ∑ MB = 0 ∑ MC = 0
- valid so long as A, B and C are not in a line i.e. collinear
Using an inappropriate equation will not give you the
wrong answer, but you will not be able to solve (0 = 0).
ENGR 1205 6 Chapter 7
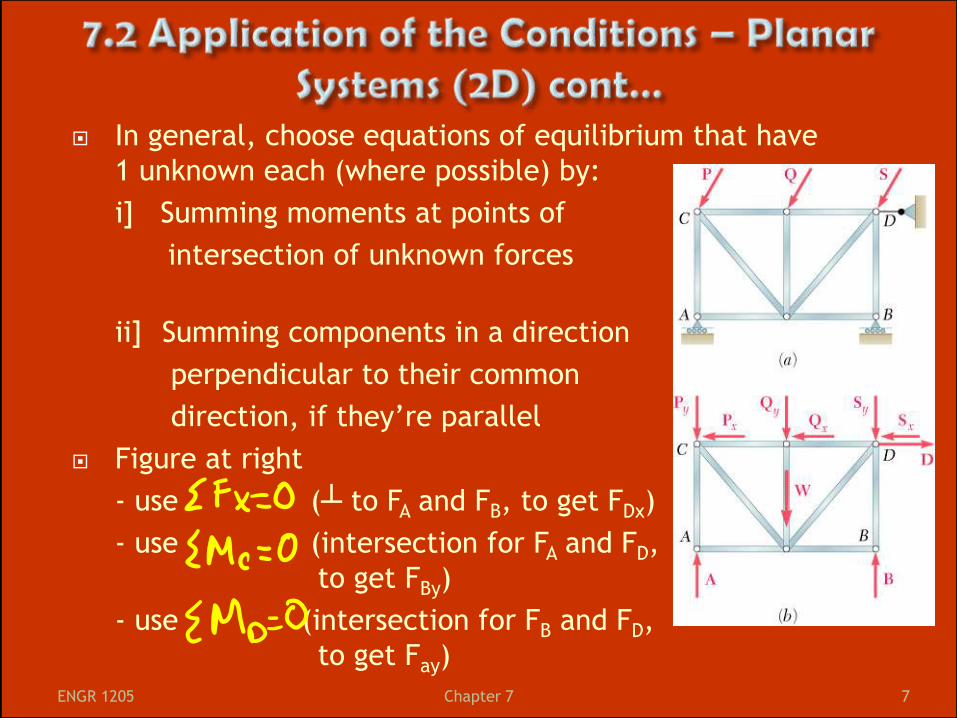
In general, choose equations of equilibrium that have
1 unknown each (where possible) by:
i] Summing moments at points of
intersection of unknown forces
ii] Summing components in a direction
perpendicular to their common
direction, if they’re parallel
Figure at right
- use (┴ to FA and FB, to get FDx)
- use (intersection for FA and FD,
to get FBy)
- use (intersection for FB and FD,
to get Fay)
ENGR 1205 7 Chapter 7
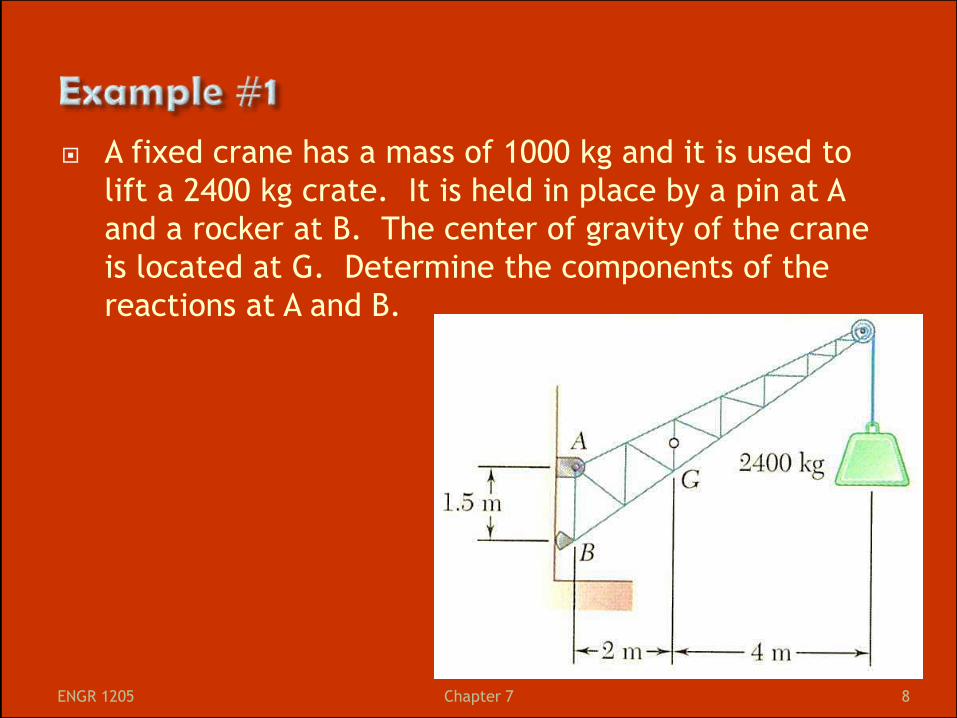
A fixed crane has a mass of 1000 kg and it is used to
lift a 2400 kg crate. It is held in place by a pin at A
and a rocker at B. The center of gravity of the crane
is located at G. Determine the components of the
reactions at A and B.
ENGR 1205 8 Chapter 7
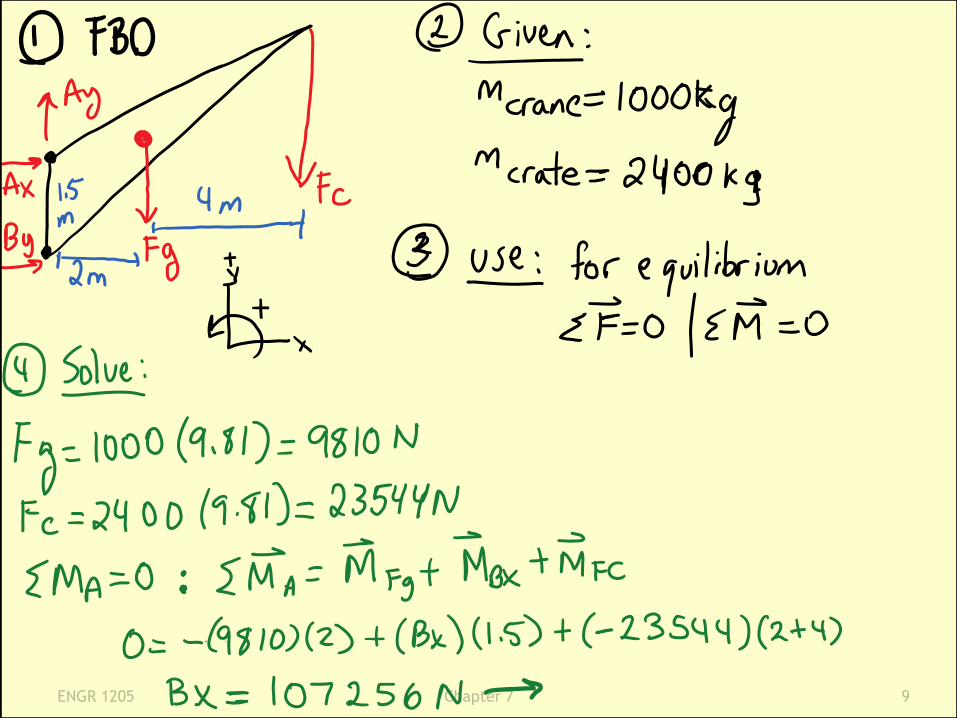
ENGR 1205 Chapter 7 9
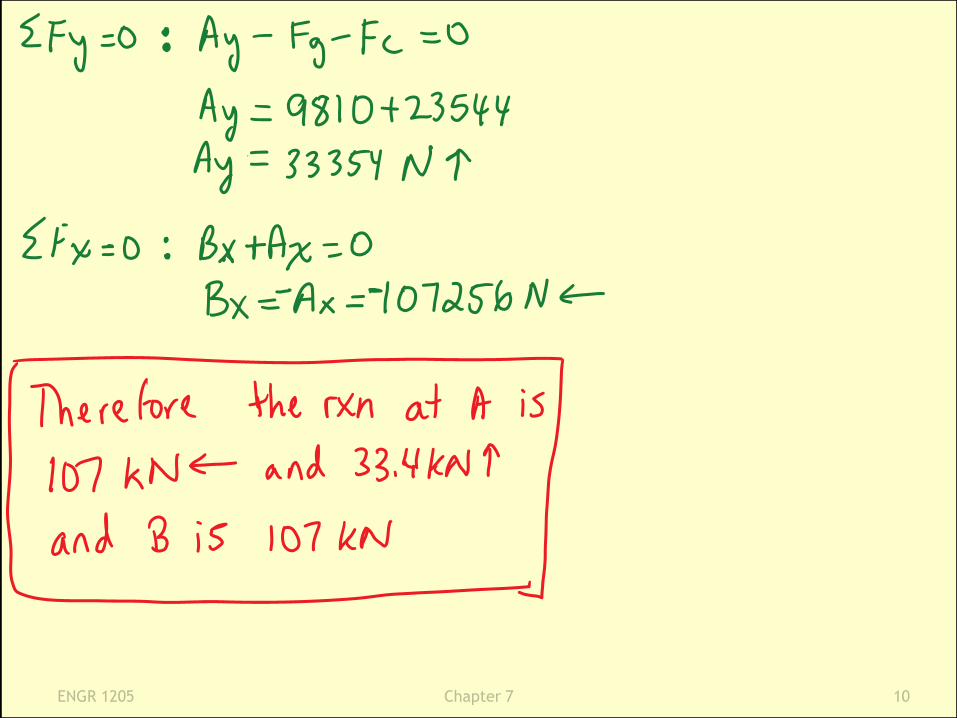
ENGR 1205 Chapter 7 10

The uniform 100 kg I-beam is supported initially by its
end roller and pin on the horizontal surface at A and
B. By means of the cable at C it is desired to elevate
end B to a position 3 m above end A. Determine the
required tension P and the reaction at A, when end B
is 3 m higher than A and C is directly below the
pulley.
ENGR 1205 Chapter 7 11
2 m
P
6 m
A B
C

ENGR 1205 Chapter 7 12
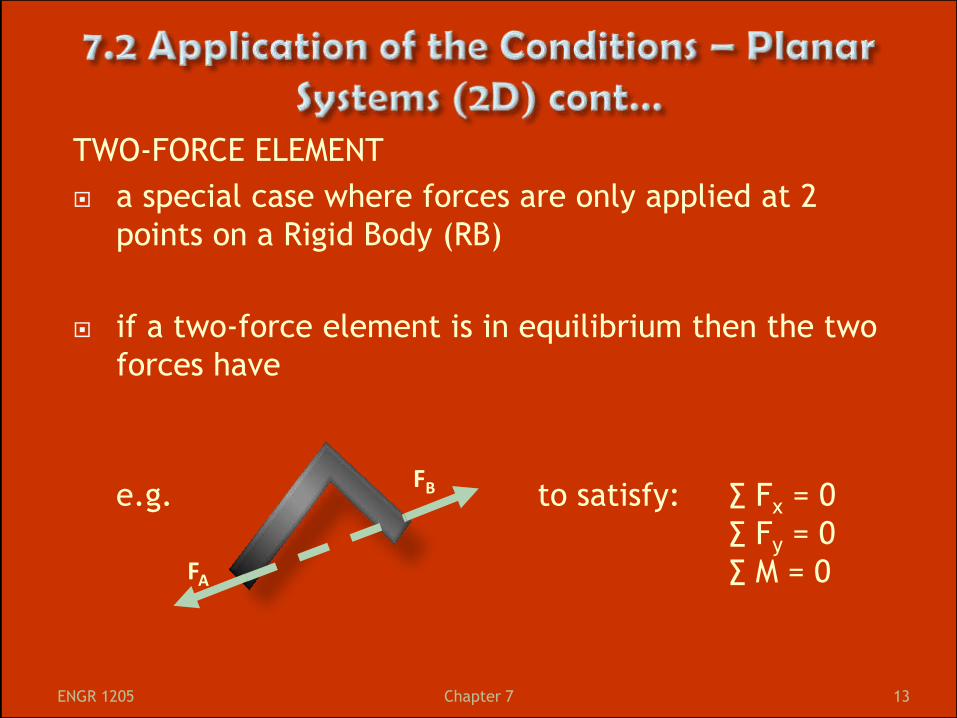
TWO-FORCE ELEMENT
a special case where forces are only applied at 2
points on a Rigid Body (RB)
if a two-force element is in equilibrium then the two
forces have
e.g. to satisfy: ∑ Fx = 0
∑ Fy = 0
∑ M = 0
FA
FB
ENGR 1205 13 Chapter 7
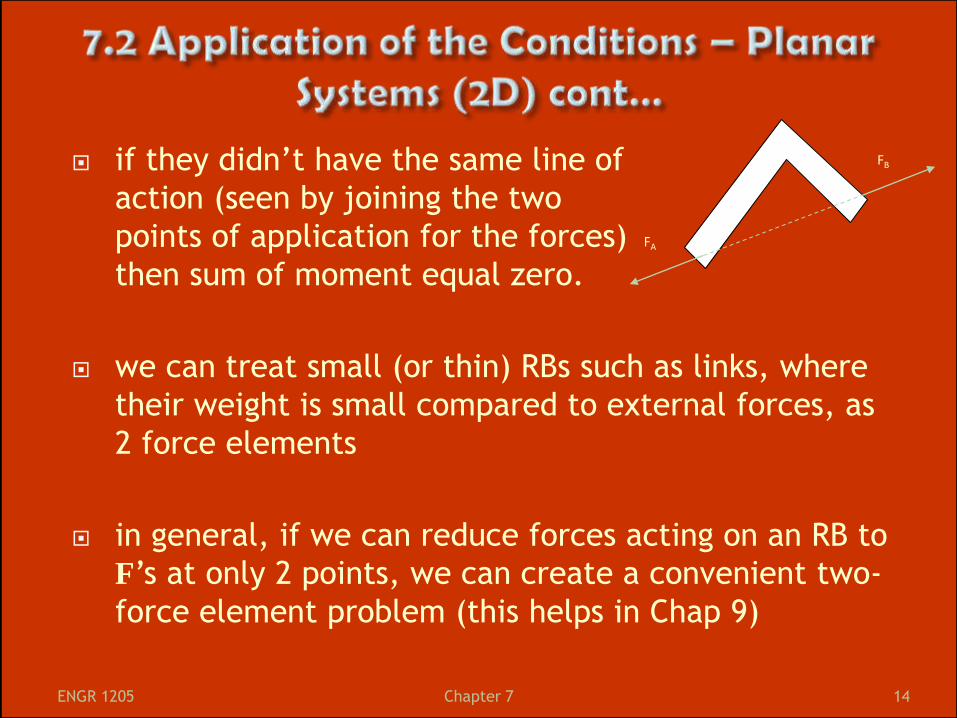
if they didn’t have the same line of
action (seen by joining the two
points of application for the forces)
then sum of moment equal zero.
we can treat small (or thin) RBs such as links, where
their weight is small compared to external forces, as
2 force elements
in general, if we can reduce forces acting on an RB to
F’s at only 2 points, we can create a convenient two-
force element problem (this helps in Chap 9)
FA
FB
ENGR 1205 14 Chapter 7
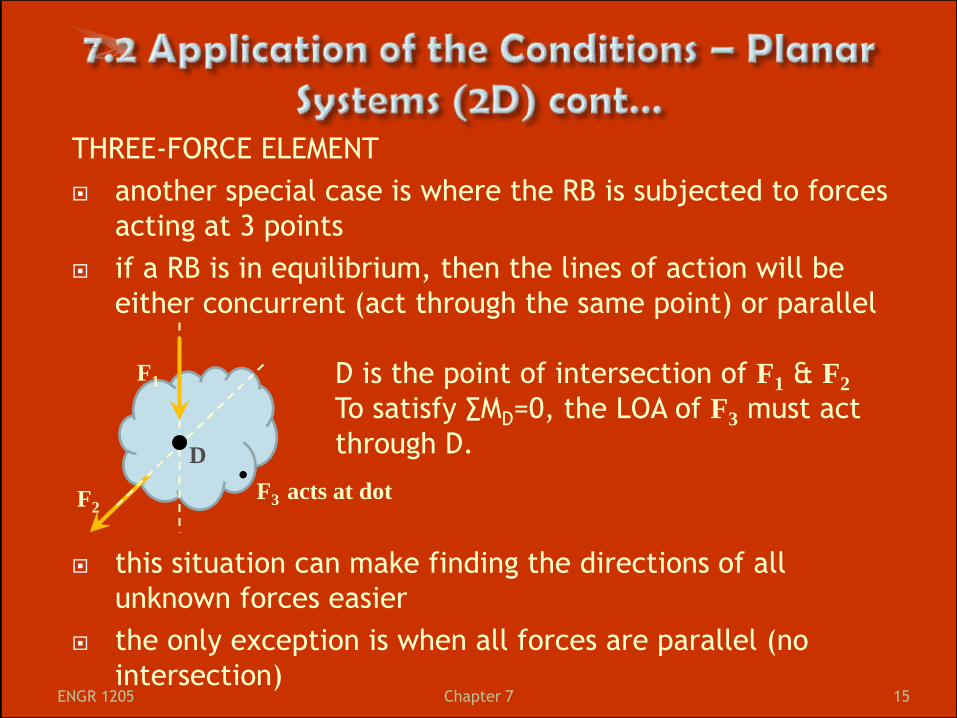
THREE-FORCE ELEMENT
another special case is where the RB is subjected to forces
acting at 3 points
if a RB is in equilibrium, then the lines of action will be
either concurrent (act through the same point) or parallel
D is the point of intersection of F1 & F2
To satisfy ∑MD=0, the LOA of F3 must act
through D.
this situation can make finding the directions of all
unknown forces easier
the only exception is when all forces are parallel (no
intersection)
F1
F2
D
ENGR 1205 15 Chapter 7
F3 acts at dot
Four types important elements
i) two-force RB is subject to forces at 2 points
~ Resultants of forces acting at each point have the same
magnitude, line of action and opposite sense
~ The direction is along the 2 points of application
ii) three-force RB is subject to forces at 3 points
~ Resultants of forces acting at each point must have
lines of action that are either concurrent or parallel
~ Use intersection of LOAs of 2 force to get the 3rd
iii) Particle is subjected to forces at only 1 point
~ All forces are concurrent
~ Moment condition is automatically satisfied
iv) Frictionless pulleys only change the direction of a cable
ENGR 1205 16 Chapter 7
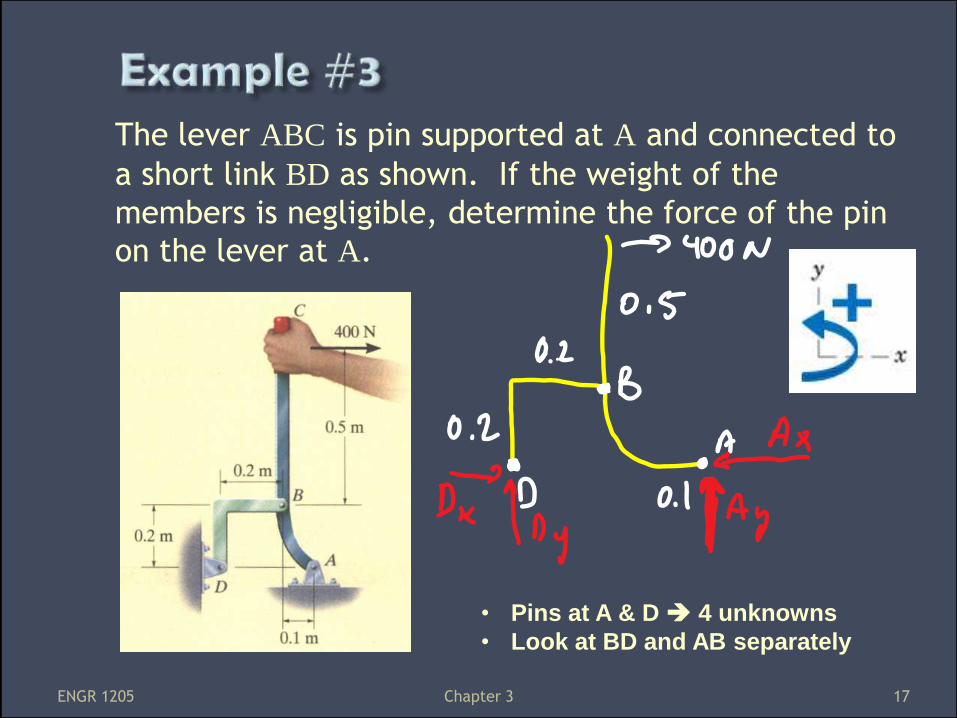
The lever ABC is pin supported at A and connected to
a short link BD as shown. If the weight of the
members is negligible, determine the force of the pin
on the lever at A.
ENGR 1205 Chapter 3 17
• Pins at A & D 4 unknowns
• Look at BD and AB separately
ENGR 1205 Chapter 3 18
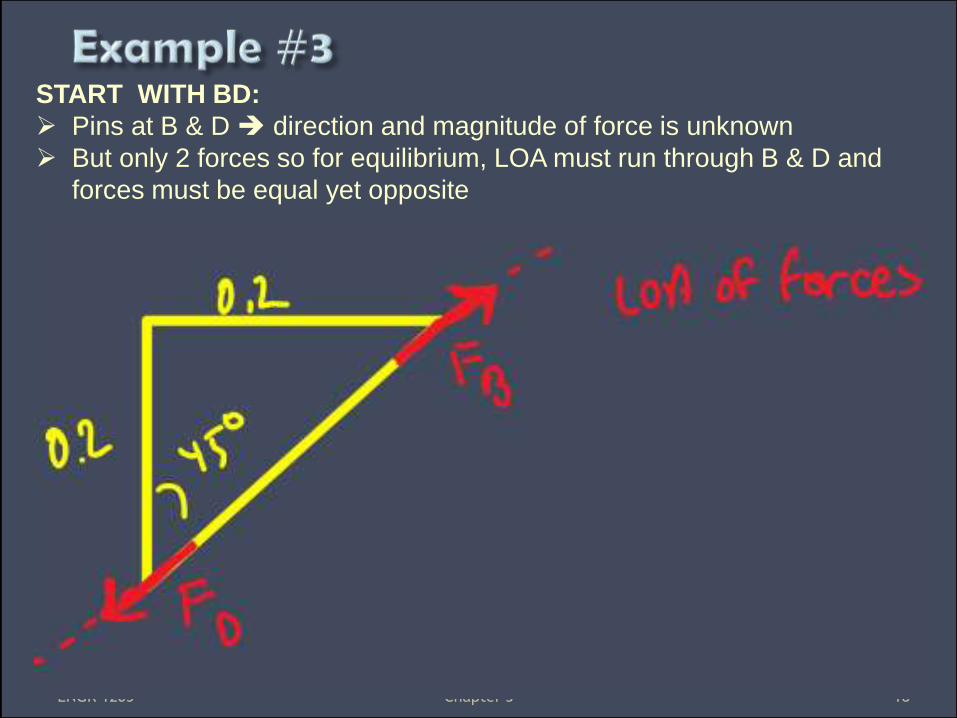
START WITH BD:
Pins at B & D direction and magnitude of force is unknown
But only 2 forces so for equilibrium, LOA must run through B & D and
forces must be equal yet opposite

ENGR 1205 Chapter 3 19
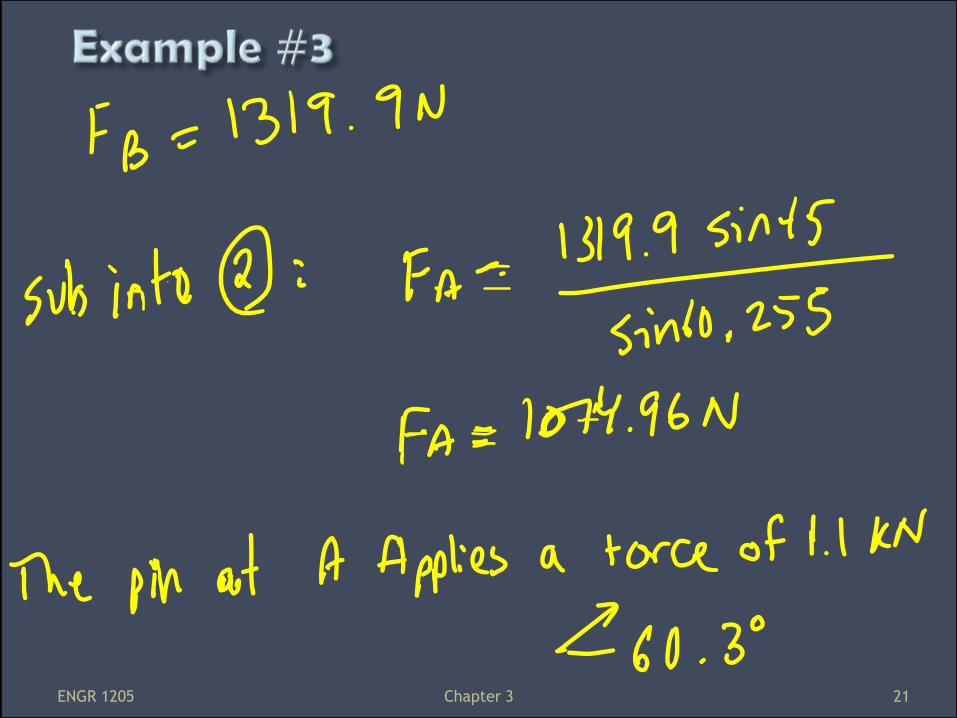
NOW LOOK AT AB:
Pins at A & B unknowns
But 𝑭𝑩 acts at 𝟒𝟓° from BD
AB is a 3-force member so all the forces meet at 1 point
We can find ∅ (for direction of 𝑭𝑨 )

ENGR 1205 Chapter 3 20
ENGR 1205 Chapter 3 21
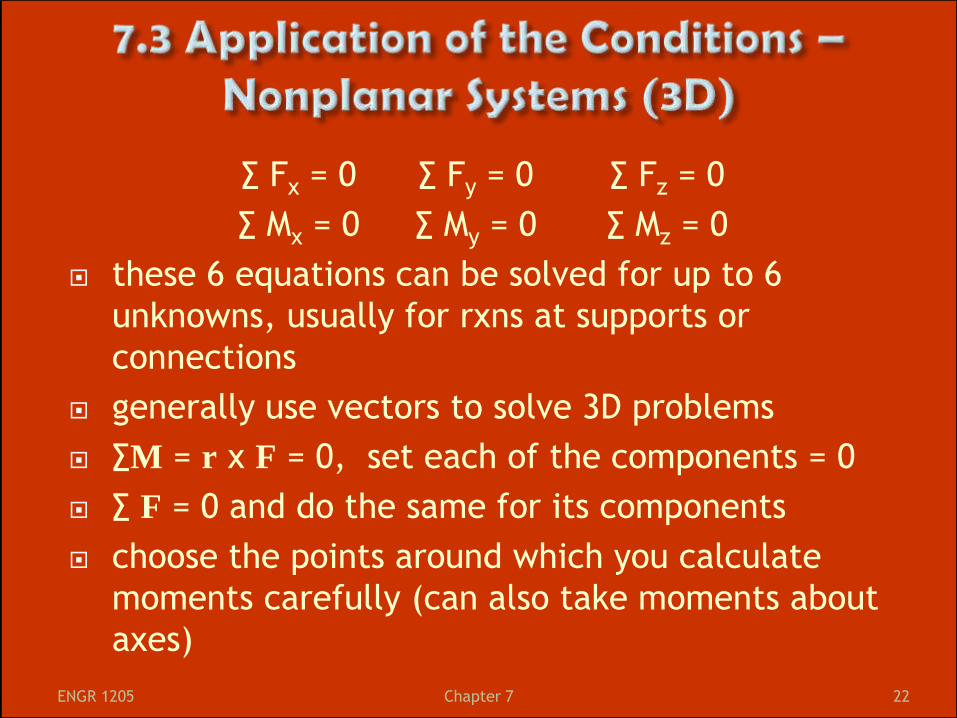
∑ Fx = 0 ∑ Fy = 0 ∑ Fz = 0
∑ Mx = 0 ∑ My = 0 ∑ Mz = 0
these 6 equations can be solved for up to 6
unknowns, usually for rxns at supports or
connections
generally use vectors to solve 3D problems
∑M = r x F = 0, set each of the components = 0
∑ F = 0 and do the same for its components
choose the points around which you calculate
moments carefully (can also take moments about
axes)
ENGR 1205 22 Chapter 7

1. draw the FBD - for each support note the 1-6 rxns
(any prevented movements are rxns … go through
carefully)
2. ∑ F = 0 and ∑ M = 0 (about any point) will give
you
3. seek equations involving as few unknowns as
possible
e.g. sum moments about ball and socket joints or
hinges, or draw an axis through points of
application of all but 1 unknown rxn, and then
solve for it using mixed triple products
ENGR 1205 23 Chapter 7

Rod AB has a weight of 200 N that acts as shown.
Determine the reactions at the ball-and-socket joint A
and the tension in the cables BD and BE.
ENGR 1205 Chapter 7 24
ENGR 1205 Chapter 7 25

ENGR 1205 Chapter 7 26

ENGR 1205 Chapter 7 27
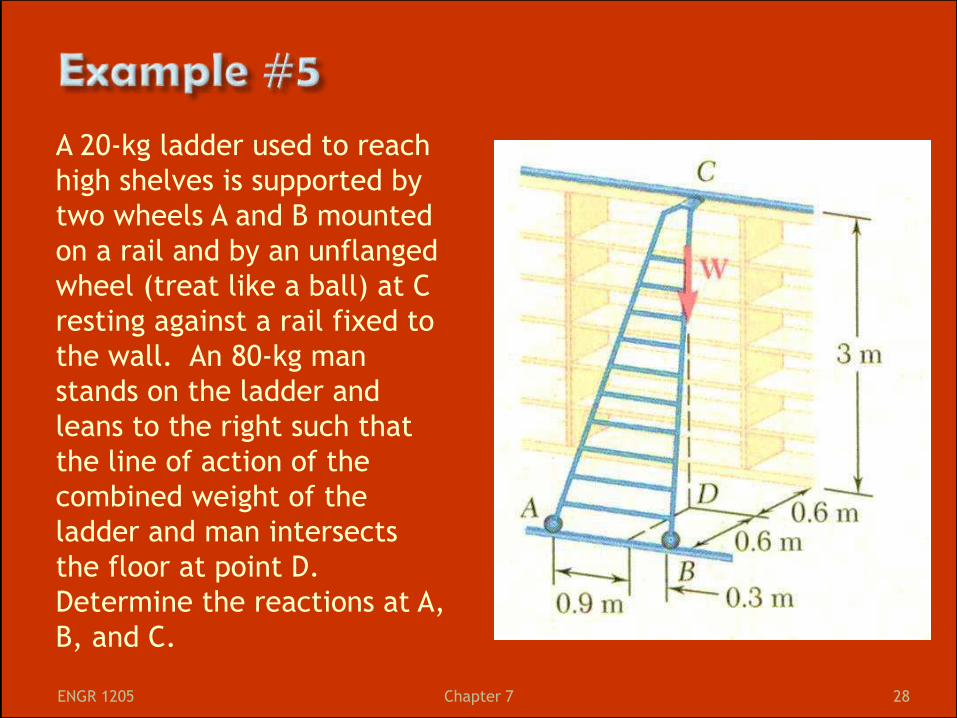
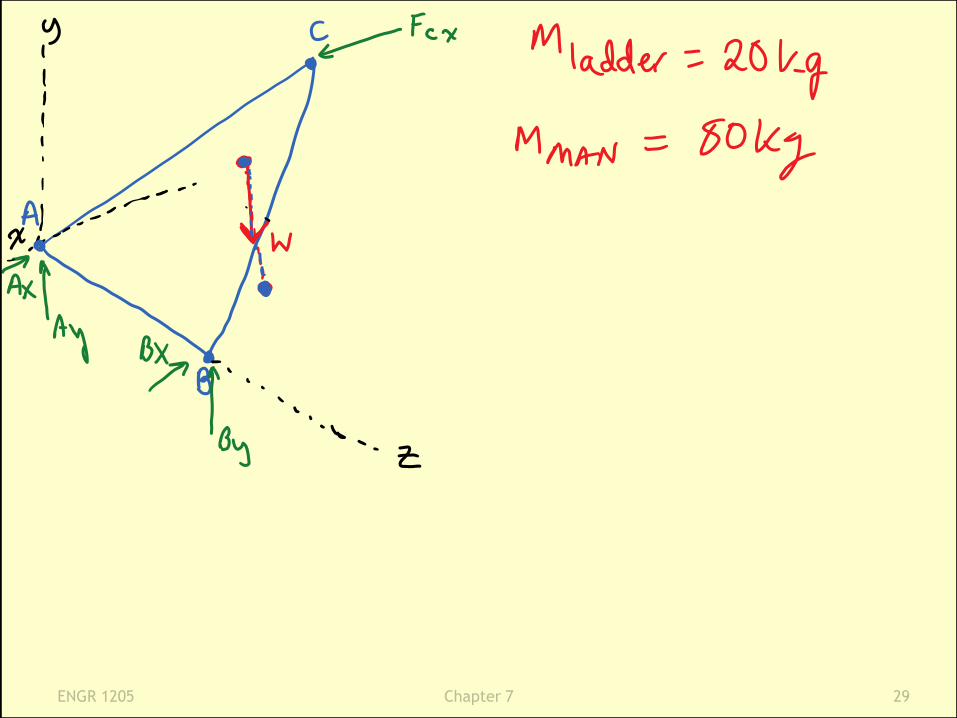
A 20-kg ladder used to reach
high shelves is supported by
two wheels A and B mounted
on a rail and by an unflanged
wheel (treat like a ball) at C
resting against a rail fixed to
the wall. An 80-kg man
stands on the ladder and
leans to the right such that
the line of action of the
combined weight of the
ladder and man intersects
the floor at point D.
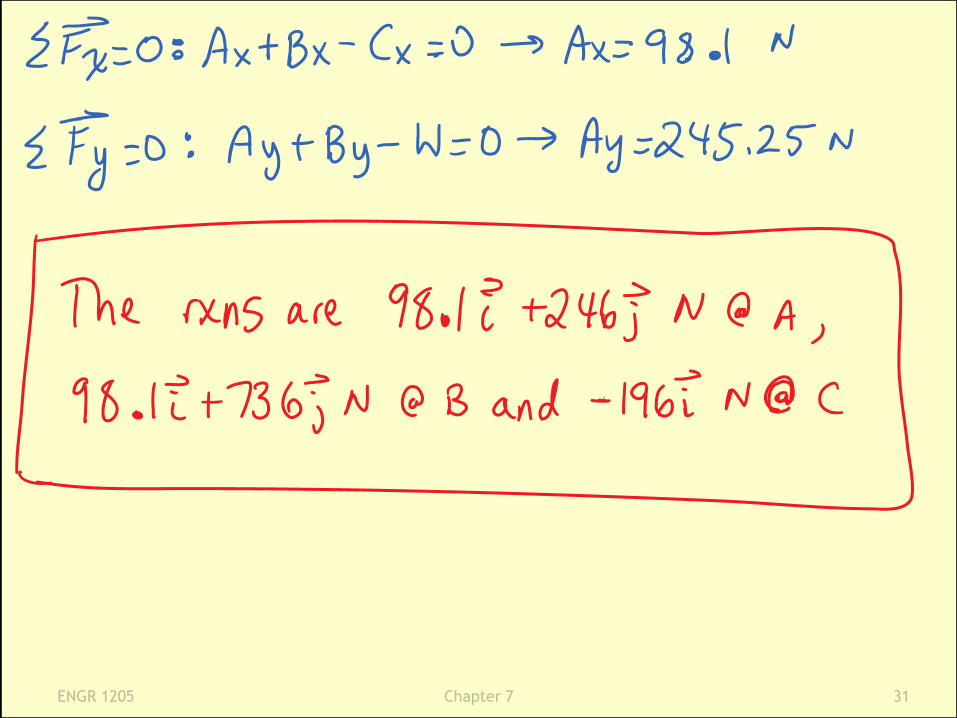
Determine the reactions at A,
B, and C.
ENGR 1205 28 Chapter 7
ENGR 1205 Chapter 7 29

ENGR 1205 Chapter 7 30
ENGR 1205 Chapter 7 31
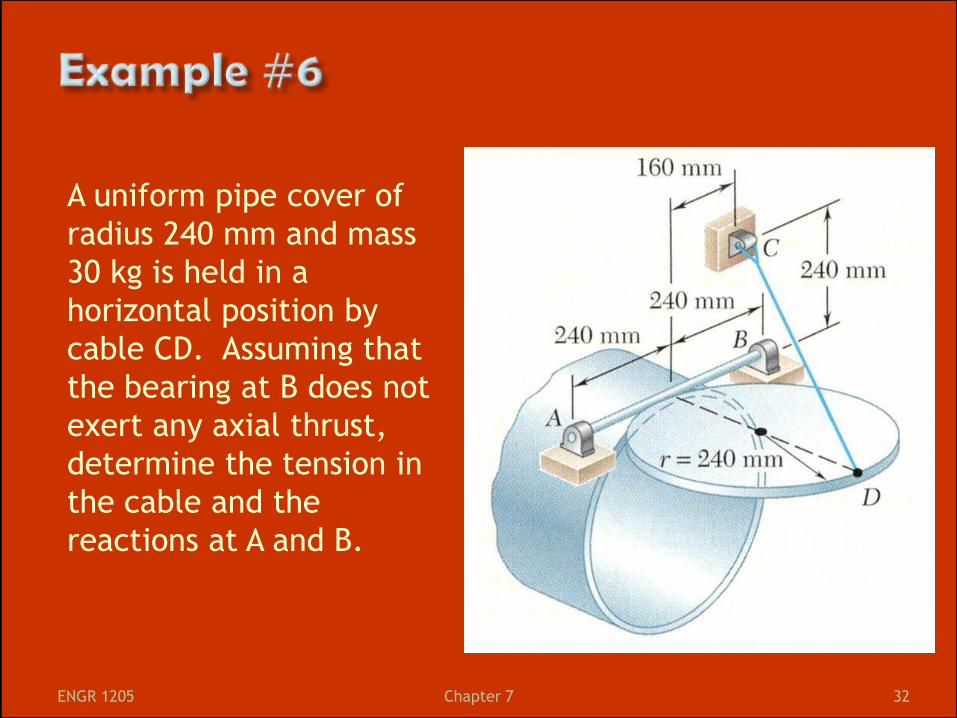
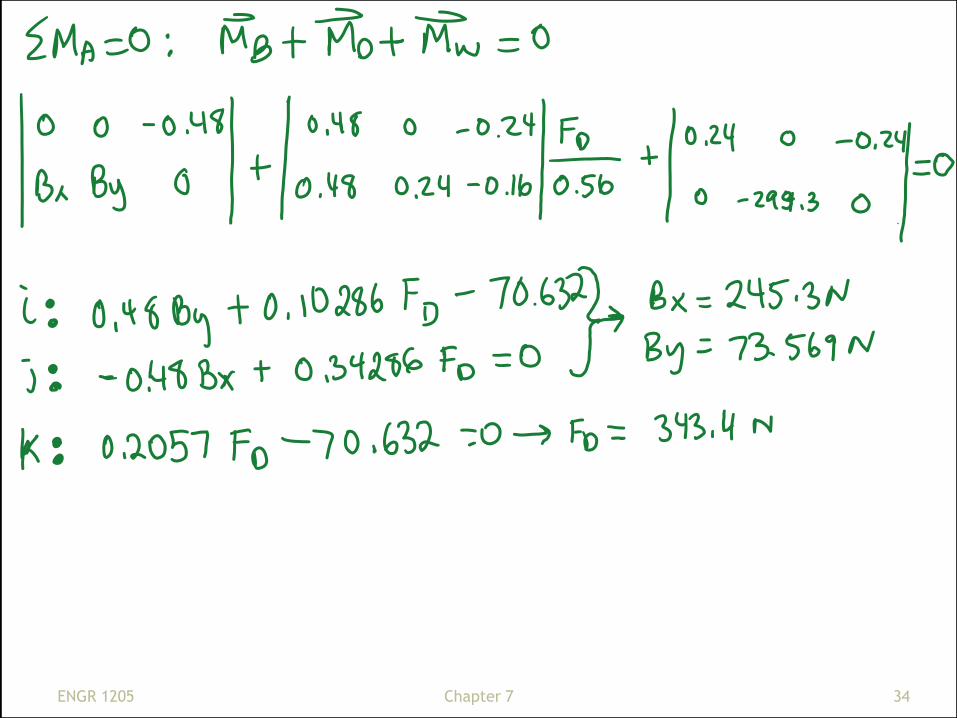
A uniform pipe cover of
radius 240 mm and mass
30 kg is held in a
horizontal position by
cable CD. Assuming that
the bearing at B does not
exert any axial thrust,
determine the tension in
the cable and the
reactions at A and B.
ENGR 1205 32 Chapter 7

ENGR 1205 Chapter 7 33
ENGR 1205 Chapter 7 34

ENGR 1205 Chapter 7 35
The tension in the cable is 343N, the
reaction at A is 𝟒𝟗𝒊 + 𝟕𝟑. 𝟔𝒋 + 𝟗𝟖. 𝟏𝒌 𝑵 and the reaction at B is 𝟐𝟒𝟓𝒊 + 𝟕𝟑. 𝟔𝒋 𝑵
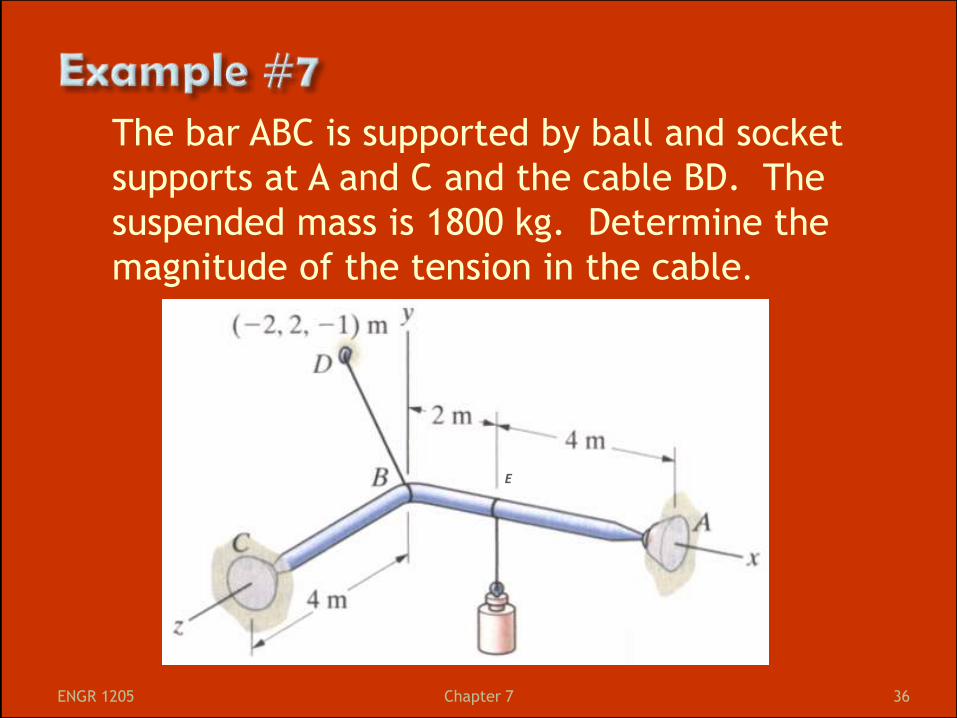
The bar ABC is supported by ball and socket
supports at A and C and the cable BD. The
suspended mass is 1800 kg. Determine the
magnitude of the tension in the cable.
ENGR 1205 36 Chapter 7
E

ENGR 1205 Chapter 7 37
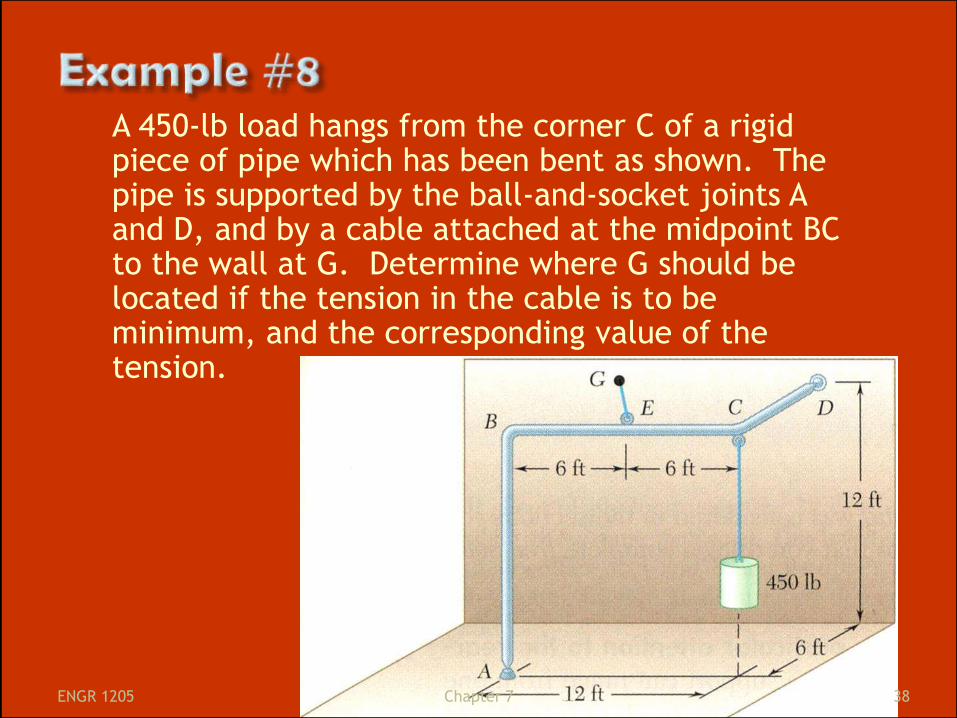
A 450-lb load hangs from the corner C of a rigid piece of pipe which has been bent as shown. The pipe is supported by the ball-and-socket joints A and D, and by a cable attached at the midpoint BC to the wall at G. Determine where G should be located if the tension in the cable is to be minimum, and the corresponding value of the tension.
ENGR 1205 38 Chapter 7

“Completely Constrained”
means the rigid body can’t move under the given
loads (or under any loads)
“Statically Determinate”
means the values of the unknowns can be determined
under static equilibrium (in 2D 3 unknowns & 3
equations, in 3D 6 unknowns & 6 equations
This case is both
statically determinate
and completely
constrained.
ENGR 1205 39 Chapter 7
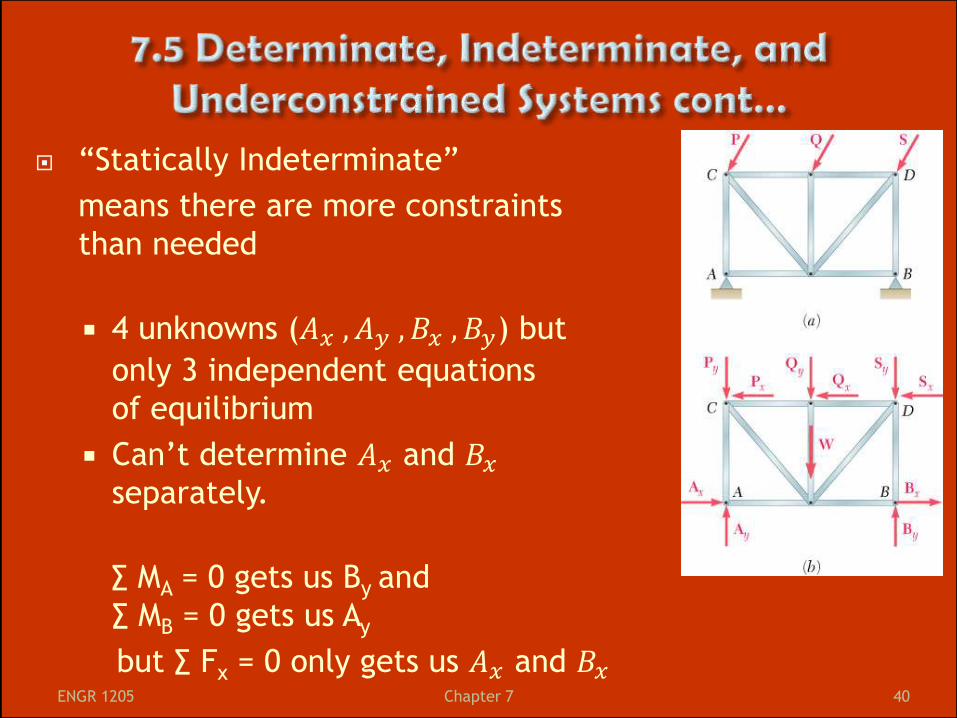
“Statically Indeterminate”
means there are more constraints
than needed
4 unknowns (𝐴𝑥 , 𝐴𝑦 , 𝐵𝑥 , 𝐵𝑦) but
only 3 independent equations
of equilibrium
Can’t determine 𝐴𝑥 and 𝐵𝑥
separately.
∑ MA = 0 gets us By and
∑ MB = 0 gets us Ay
but ∑ Fx = 0 only gets us 𝐴𝑥 and 𝐵𝑥
ENGR 1205 40 Chapter 7
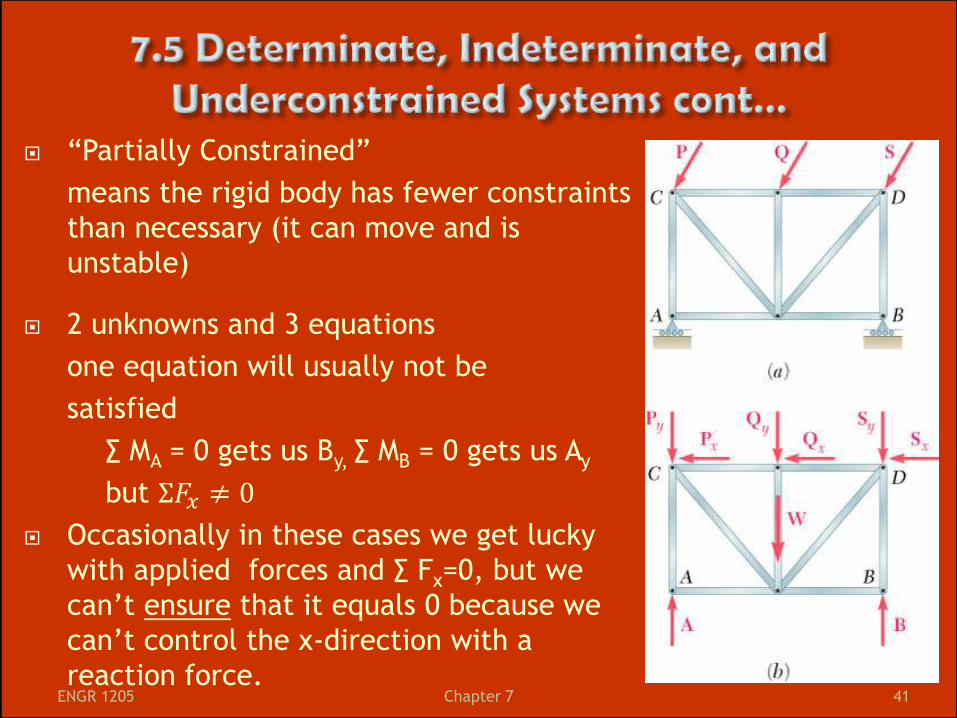
“Partially Constrained”
means the rigid body has fewer constraints
than necessary (it can move and is
unstable)
2 unknowns and 3 equations
one equation will usually not be
satisfied
∑ MA = 0 gets us By, ∑ MB = 0 gets us Ay
but Σ𝐹𝑥 ≠ 0
Occasionally in these cases we get lucky
with applied forces and ∑ Fx=0, but we
can’t ensure that it equals 0 because we
can’t control the x-direction with a
reaction force. ENGR 1205 41 Chapter 7
In order to be statically determinate and completely
constrained, we need an equal number of unknowns
and equations of equilibrium.
If not, the system will be partially constrained or
statically indeterminate or both.
Having an equal number of unknowns and equations is
necessary (but not sufficient ) for static determinacy
ENGR 1205 42 Chapter 7
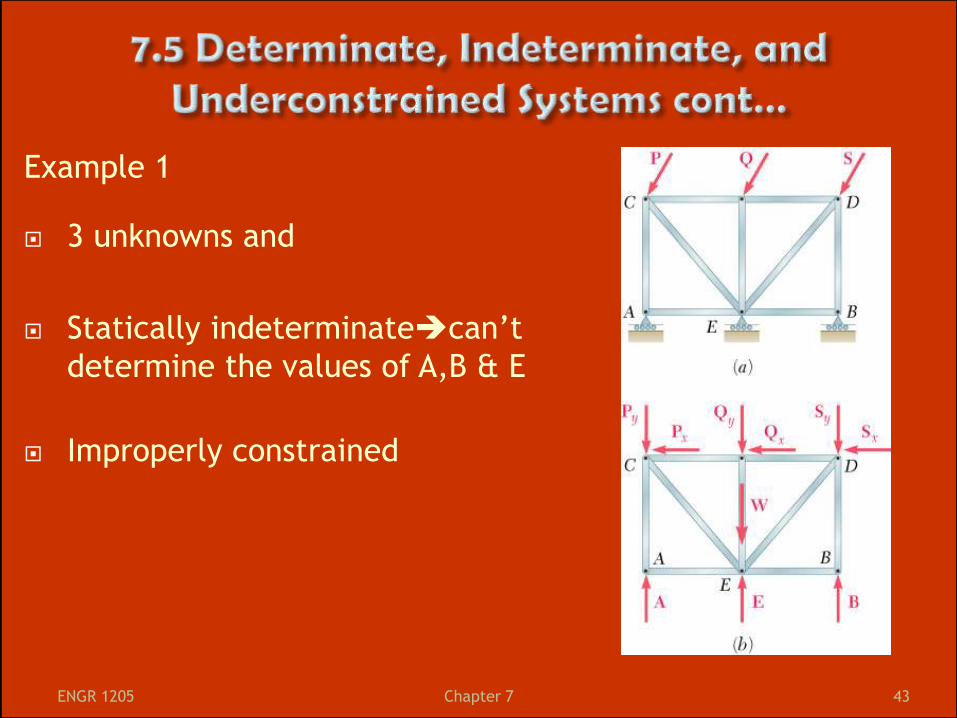
Example 1
3 unknowns and
Statically indeterminatecan’t
determine the values of A,B & E
Improperly constrained
ENGR 1205 43 Chapter 7

Example 2
4 unknowns and Σ𝑀𝐴 ≠ 0
Statically determinate 4 unknowns
and 3 independent equations
Improperly constrained Σ𝑀𝐴 = 0
doesn’t hold since the LOA of the rxn
forces all go through the A
ENGR 1205 44 Chapter 7

In 3D:
if rxns involve > 6 unknowns, some rxns will be
statically indeterminate
if rxns involve < 6 unknowns, the RB will only be
partially constrained (although it may still be in
equilibrium depending on specific loads)
even with 6+ unknowns, some equations may not be
satisfied (such as when rxns are parallel or intersect
the same line) in which case the RB is then improperly
constrained
ENGR 1205 45 Chapter 7
A system is improperly constrained whenever the
supports (even if providing enough rxns) are arranged
such that the rxns are concurrent (as above in
example 2) or in parallel (as in example 1).
To get static determinancy, make sure the rxns involve
3 unknowns and that the supports don’t require
concurrent or parallel rxns
supports involving statically indeterminate rxns can
be dangerous, so be careful using them when
designing things
ENGR 1205 46 Chapter 7
“Completely Constrained” means the rigid body can’t
move under any loads
“Statically Determinate” means the values of the
unknowns can be determined under static equilibrium
“Statically Indeterminate” means there are more
constraints than needed
“Partially Constrained” means the rigid body has fewer
constraints than necessary
In order to be statically determinate and completely
constrained, we need an equal number of unknowns and
equations of equilibrium and that the supports don’t
require concurrent or parallel rxns
ENGR 1205 47 Chapter 7