technical manual212.113.105.12/.../70x8_profibus_technical_manual.pdf · the following information...
TRANSCRIPT

TTeecchhnniiccaall MMaannuuaall
Absolute Single/Multiturn Encoders
ATEX Series 70X8
PPrrooffiibbuuss DDPP‐‐DDIINN 1199224455‐‐33
Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 1-2 of 16
©© FFrriittzz KKüübblleerr GGmmbbHH
Copyright Protection The contents of this documentation are protected by copyright © Fritz Kübler GmbH. The contents of this documentation may not be altered, expanded, reproduced nor circulated to third parties, without the prior written agreement of Fritz Kübler GmbH. Liability to modification without notice As a result of ongoing efforts to improve our products, we reserve the right to make changes at any time to technical information contained in the document to hand. Warranty Disclaimer Fritz Kübler GmbH provides no guarantee, neither tacit nor express, in respect of the whole manual (whether this applies to the original German text or to the English translation) and assumes no liability for any damage, neither direct nor indirect, however caused. Document information Revised 03‐2010 Screen printouts used Profibus Master Tool Fa. Bihl & Wiedemann Fritz Kübler GmbH Schubertstr.47 78054 VS‐Schwenningen / Germany Tel. +49 (0) 7720‐3903‐0 Fax +49 (0) 7720‐21564 E‐Mail: [email protected] Internet: www.kuebler.com

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 1-3 of 16
Table of Contents 1 GENERAL ............................................................................................ 1‐4
PROFIBUS‐DP BASICS ..................................................................................................................................................... 1‐4 THE PROFILE REQUIRED ...................................................................................................................................................... 1‐4 CHARACTERISTICS ............................................................................................................................................................. 1‐4 PROTECTIVE FUNCTIONS..................................................................................................................................................... 1‐4
2 START‐UP ........................................................................................... 2‐5
3 GENERAL WIRING INSTRUCTIONS ....................................................... 3‐5
INSTALLATION INSTRUCTIONS FOR RS‐485 ............................................................................................................................. 3‐5
4 GROUNDING AND EQUIPOTENTIAL BONDING .................................... 4‐6
5 CHARACTERISTICS OF PROFIBUS ......................................................... 5‐7
PNO‐IDENT‐NUMBER ....................................................................................................................................................... 5‐7 START PHASE OF THE ENCODER ON THE PROFIBUS .................................................................................................................. 5‐7 CONFIGURATION AND PARAMETERISATION ............................................................................................................................. 5‐7 CONFIGURATION .............................................................................................................................................................. 5‐7
6 DEVICE PROFILE ‐ PROFILE FOR ENCODER V1.1 .................................. 6‐8
CONFIGURATION .............................................................................................................................................................. 6‐8
7 PROFIBUS ENCODER PROFILE 3062 (VERSION 1.1). ............................. 7‐9
PRESET SETTING ............................................................................................................................................................... 7‐9 SPEED VALUES ................................................................................................................................................................. 7‐9 EXTENDED DIAGNOSTICS ................................................................................................................................................... 7‐10 1. DEVICE PROFILE FOR ENCODERS ....................................................................................................................................... 7‐10 Class 1 Mandatory for all DP encoders ..................................................................................................................... 7‐10 Class 2 Optional Functionality ................................................................................................................................. 7‐10
8 SET SLAVE ADDRESS (SSA) ............................................................... 8‐11
9 PROFIBUS CONNECTION CABLE LEADS OUTPUT .............................. 9‐11
SUPPLY VOLTAGE (POWER SUPPLY) ...................................................................................................................................... 9‐11 EX ............................................................................................................................................................................... 9‐11 PROFIBUS LINES A AND B .................................................................................................................................................. 9‐12 EX ............................................................................................................................................................................... 9‐12
10 BUS TERMINATION ........................................................................ 10‐12
11 PARAMETERISATION ...................................................................... 11‐13
12 SCALING ......................................................................................... 12‐14
13 DEFAULT SETTINGS ON DELIVERY ................................................... 13‐16
ENCODER PROFILE ......................................................................................................................................................... 13‐16

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 1-4 of 16
11 GGeenneerraall PROFIBUS‐DP basics
This description provides information concerning the implementation of the PROFIBUS‐DP transmission protocol in the slave mode in our devices. It should be noted that the extent of the functions described might be limited according to the device or application. With protocol conversions in particular, as a rule fewer functions are used! The profile required The link between the decentralized process operation and the central control via the communication system takes place in the lowest hierarchy level on the filed or process bus. At this level, the main requirements are a simple protocol operation and short data transmission times for the communication. This ensures the fastest system reaction time to the dynamic states of the peripherals. In addition to the classic data exchange, the acyclic transmission of parameter, diagnostic and configuration data must be possible, without radically impeding the real‐time capability of the bus. This is the only way to guarantee the achievement of good diagnostics and safe operation. Characteristics The main task of PROFIBUS‐DP is the cyclic transmission of the process data from the control system to the peripheral equipment and vice versa. The access procedure uses the Master‐Slave principle. Here in the polling operation a Master communicates with its assigned slave devices one after the other on the bus. A data exchange is initiated by a request telegram and ended by an acknowledgement telegram from the Slave concerned. So, each Slave only becomes active after a call from the Master. This avoids a simultaneous bus access. The hybrid access procedure of PROFIBUS allows a combined operation of several bus masters and even a mixed operation of PROFIBUS‐DP and PROFIBUS‐FMS within a bus section. However the pre‐requisition for this is the correct configuration of the bus system and the unambiguous assignment of the Slave devices to the Masters. PROFIBUS‐DP distinguishes two types of Master. The Class 1 Master carries out the cyclic transmission of the operating data and supplies the user data. The Class 1 Master can be addressed by a Class 2 Master using certain functions. Direct access to the Slaves is not permitted. The functions are limited to support services such as reading the diagnostic information of the slaves. A Class 2 Master is thus also understood as a programming or diagnostic device. Protective functions
PROFIBUS‐DP is equipped with many protective functions. These ensure safe fault‐free communication not only in the harsh environment of the decentralised peripheral equipment, but also in the case of external interference or the failure of one or more stations. Wrong parameter settings are recognized directly, in that stations having the wrong parameters are not integrated in the operating data exchange. The Master records the failure of any station and indicates this to the user by means of a general diagnostic message. Any breakdown in the transmission path is detected by the Slave by means of time monitoring and leads to the outputs being switched off. EMV disturbances are virtually filtered out by means of the difference signal, thanks to the particularly noise‐immune RS485 transmission system. Data transmission errors are recognized thanks to frame and check‐sum controls and lead to the retransmission of the telegram.

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 3-5 of 16
22 SSttaarrtt‐‐uupp Before a PROFIBUS‐DP system can be started up, unique bus addresses must be assigned to all connected stations, including the Master system. This is the only way to ensure unambiguous addressing on the bus. The station addresses should be assigned via the bus at first. The physical system settings are made using the parameter set of the Master. In addition to the bus address of the Master, this set includes, for example, the baud rate, the time‐out delays and the number of repetitions of the transmission. Along with the Master parameter set, a Slave data set must be saved for each Slave to be activated. A data set contains the parameter assignment and configuration data of the Slave and the address indicator for the logical storage of the I/O data. If the parameter sets are present, then either at the request of the user or automatically the Master system begins to start the Slaves up, one after the other. The first so‐called diagnostic cycles are able to show, which slave is present on the bus. Only those Slaves, which sent a correct feedback during the diagnostic cycle, will subsequently be parameterized in the parameter cycles with the corresponding data stored in the Master. If this has been correctly carried out, then configuration cycles follow, during which a comparison is made between the required configuration data stored in the Master and the actual configuration data of the Slave. After the last diagnostic cycle, each Slave for which no error was detected during the comparison is ready for operation. Each of these Slaves is then integrated automatically by the Master in the operating data transfer. For diagnostic purposes, the Master provides a diagnostic buffer for each Slave, which can be read by the user for other purposes. To simplify the diagnostics, a general diagnostic field is kept simultaneously, which shows bitwise whether a Slave has diagnostic data ready or not.
33 GGeenneerraall wwiirriinngg iinnssttrruuccttiioonnss Installation instructions for RS‐485 All devices are connected within a bus structure (line). Up to 32 stations (Master or Slaves) can be linked together in one segment. The bus is terminated at the beginning and at the end of each segment by an active bus termination (termination resistors). To ensure disturbance‐free operation both bus terminations must always remain powered. The bus termination is provided ready‐to‐activate in the device of in the connector. When there are more than 32 stations on the bus, repeaters must be inserted to connect the individual bus segments. Node Attachment The nodes are attached to the LAN cables via bus connectors or cable leads, bus terminals or RS‐485 repeaters. Cable Termination Each bus segment must be terminated at both ends with its characteristic impedance. This cable terminator is integrated in the RS‐485 repeaters, the bus terminals, the ILM and the bus connectors and can be activated if required. Before the cable terminator can be activated, the component must be supplied with power. With the bus terminals and the bus connectors, this power is supplied by the connected DTE, whereas the RS‐485 repeater, the ILM, and the terminator have their own power supply. The RS‐485 transmission technique allows the attachment of a maximum of 32devices (DTEs and repeaters) per bus segment. The maximum permitted cable length of a segment depends on the transmission rate and the LAN cable used.

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 4-6 of 16
44 GGrroouunnddiinngg aanndd eeqquuiippootteennttiiaall bboonnddiinngg
Effective grounding and equipotential bonding are very important for the interference immunity of PROFIBUS networks. Grounding and bonding is thus primarily to ensure correct functioning of PROFIBUS, and not for safety reasons. Proper grounding of the cable shield ensures that electrostatic interference is reduced, so minimizing pickup. Equipotential bonding ensures that the ground or earth potential is the same across the network. This, in turn, prevents ground currents flowing through the PROFIBUS cable shield. The following information provides general guidance for the installation of grounding and equipotential bonding.
At the PROFIBUS station Connect the PROFIBUS cable shield to the equipotential bonding at every PROFIBUS station. The PROFIBUS connector, where used, provides connection for the cable shield. However, this requires a properly made the shield connection in the connector.

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 5-7 of 16
55 CChhaarraacctteerriissttiiccss ooff PPrrooffiibbuuss PNO‐Ident‐Number The Sendix Absolute Singleturn/Multiturn Encoder has the PNO‐Ident‐Number 5868 (Hex). This number is
registered at the PNO (Profibus User Organization) as an unique identification. The according GSD‐Files are named
as follows:
• Multiturn Series 7068,7088 KUEB7068.GSD
• Singleturn Series 7058,7078 KUEB7058.GSD
Start phase of the encoder on the PROFIBUS When the encoder starts up it is in the ‘Baud‐Search’ state. Once the baud rate has been recognized, it switches to the WAIT_PRM state and waits for the parameter data from the DP‐Master. The parameterisation occurs automatically when the DP‐Master starts up. The following parameters are transmitted to the encoder: count direction and the measuring length in steps (for more details, see the Encoder Profile from the PNO). When the correct parameter data have been successfully transferred, the encoder switches to the WAIT_CFG state. The PROFIBUS Master then sends a configuration byte to determine the number of inputs/outputs. If the configuration byte is correct, the encoder switches to the state DATA_EXCHANGE. Configuration and Parameterisation The parameterisation, i.e. the transfer of the parameters for count direction, encoder resolution etc., normally occurs within the configuration programme for the PROFIBUS Master used. To do this, the type file or GSD (device file) should be copied to the respective directory for type or GSD files. With some programmes such as COM PROFIBUS or STEP7 Manager, an update of the internal device list (hardware catalogue) must be carried out within the software. For more information about integrating field devices, please refer to the documentation for the software you are using. The two steps described below are normally necessary for integrating and parameterising the encoder in a Master system.
Configuration For configuration purposes, i.e. to input the length and type of the I/O on the PROFIBUS, the configuration programme normally provides an input mask (screen), in which – independently of the desired configuration – the identifier has normally already been set as a default, so that only the I/O addresses remain to be entered. Depending on the required configuration that is desired, the encoder allocates a varying number of input and output words on the PROFIBUS. The following parameters described are also dependent on the required configuration. The GSD device file (e.g. KUEB7068.GSD) contains five required configurations for PNO Class1 and 2, each with 16‐ and 32 Bit resolution.

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 6-8 of 16
66 DDeevviiccee PPrrooffiillee ‐‐ PPrrooffiillee ffoorr EEnnccooddeerr VV11..11 This profile describes a manufacturer‐independent and mandatory determination of the interface for encoders. It is defined in the protocol, which Profibus functions are used as well as how they are to be used. This standard permits an open manufacturer‐independent bus system. The device profile is divided into two object classes:
• Class C1 describes all the basic functions, which the encoder should contain. • Class C2 contains a number of extended functions, which must either be supported by encoders of this class (Mandatory) or which are optional. Class C2 devices thus contain all the C1 and C2 mandatory functions, as well as additional manufacturer‐dependent optional functions. An address area is also defined in the profile, which can be reserved for a manufacturer’s own proprietary special functions.
Configuration The configuration programme normally provides an input mask (screen) for parameterisation purposes, i.e. for entering the data for resolution, count direction etc. The individual modules are listed below:
Configurations available for the regular operation of the encoder:
- 32 Bit Input/Output, consistent - 32 Bit Input, consistent - 16 Bit Input/Output, consistent - 16 Bit Input, consistent - MUR=13 Bit and TMR=25 Bit (32 Bit Input/Output, consistent)
‐ all can combined with Speed (RPM) 16 Bit consistent or Speed (Units/s) 32 Bit consistent

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 7-9 of 16
77 PPrrooffiibbuuss EEnnccooddeerr PPrrooffiillee 33006622 ((VVeerrssiioonn 11..11)).. Class 2 32‐Bit resolution, Input/Output consistent:
The encoder uses 2 input words and 2 output words, which are each consistently transmitted over the bus.
Class 2 32‐Bit resolution, Input consistent:
The encoder uses 2 input words, which are each consistently transmitted over the bus.
Class 1 16‐Bit resolution, Input/Output consistent:
The encoder uses 1 input word and 1 output word, which are each consistently transmitted over the bus.
Class 1 16‐Bit resolution, Input consistent:
The encoder uses 1 input word, which is consistently transmitted over the bus.
Combination with:
Class 2 32‐Bit resolution, Input consistent Speed in (units/s) or
Class 2 16‐Bit resolution, Input consistent Speed in (rpm)
The encoder uses max. 2 input words, which are each consistently transmitted over the bus.
Default setting Scaling on, 25 Bit total resolution Class 2 32‐Bit resolution MUR=13Bit,TMR=25Bit:
Preset setting In the mode ‘Class 2’ the encoder can be adjusted over the PROFIBUS to any position value in the value range of 27 Bit or 15 Bit. This occurs by setting the most significant bit (MSB) of the output data (2^31 for configuration Class 2 ‐ 32 Bit or 2^15 for configuration Class 2 ‐ 16 Bit). The Preset Value that is transmitted in the data bytes 0 ‐ 3 is accepted as the position value with the rising edge of Bit 32 (=Bit 7 of data byte 3). The encoder then continues counting from this position. A new adjustment is then only possible after the control bit has been reset. There is no acknowledgment of this action via the inputs. Speed values All modules can be combined with the configuration of an additional Speed value. The input words are increased to a maximum length of 8 Bytes (64 Bit) depending on the configuration of the speed value. The Speed value is signed and depends on the count direction. Positive values in CW, negative in CCW direction. Format is in “Big Endian”: Input word Input word
Byte 0 Byte 1 Byte 2 Byte 3 Format Max.
0 0 RPM 0
17 70 RPM 6000
E8 90 RPM ‐6000
00 63 FF 9C Units/s 6553500
FF 9C 00 64 Units/s ‐ 6553500 Speed limits:
Singleturn Encoder: 600 rpm higher speed shows ffffh as value Multiturn encoder: 12000 rpm higher speed shows ffffh as value

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 7-10 of 16
Extended Diagnostics 1. Device profile for encoders
CCllaassss 11 MMaannddaattoorryy ffoorr aallll DDPP eennccooddeerrss Function Octet N°. Data Type Name Data_Exchange 1‐4 Unsigned 32 Position Value (input) Data_Exchange 1‐4 Unsigned 32 Preset Value (output) Data_Exchange 1‐4 Unsigned 32 Speed Value (input) (units/s) Data_Exchange 1‐4 Unsigned 16 Speed Value (input) (rpm) RD_inp 1‐4 Unsigned 32 Position Value RD_inp 1‐4 Unsigned 32 Speed Value Slave_Diag 7 Octet String External Diagnostic Header Slave_Diag 8 Octet String Alarms Slave_Diag 9 Octet String Operating Status Slave_Diag 10 Octet String Encoder Type Slave_Diag 11‐14 Unsigned 32 Singleturn Resolution Slave_Diag 15,16 Unsigned 16 Number of Revolution Set_prm 9 Octet String Operating Parameters
CCllaassss 22 OOppttiioonnaall FFuunnccttiioonnaalliittyy
Function Octet N°. Data Type Name Slave_Diag 17 Octet String Additional Alarms Slave_Diag 18,19 Octet String Supported Alarms Slave_Diag 20,21 Octet String Warnings Slave_Diag 22,23 Octet String Supported Warnings Slave_Diag 24,25 Octet String Profile Version Slave_Diag 26,27 Octet String Software Version Slave_Diag 28‐31 Unsigned 32 Operating Time Slave_Diag 32‐35 Signed 32 Offset Value Slave_Diag 36‐39 Signed 32 Manufacturer Offset Value Slave_Diag 40‐43 Unsigned 32 Measuring Units per Revolution Slave_Diag 44‐47 Unsigned 32 Total measuring range in measuring units Slave_Diag 48‐57 ASCII String Serial Number Set_prm 10‐13 Unsigned 32 Measuring Units per revolution Set_prm 14‐17 Unsigned 32 Total measuring range in measuring units

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 9-11 of 16
88 SSeett SSllaavvee AAddddrreessss ((SSSSAA)) The Service Access Point “ SAP 55 Set_Slave_Address ” can only be carried out with a Class2 Master in the Profibus startup sequence. Default settings after a Power‐on is the address 125 (0x7D) for SSA_Support .
Only valid addresses will be stored in a non‐volatile memory and are active by now. The Node number 0 is reserved and must not be used by any node. The resulting node numbers lie in the range 1...7Dh hexadecimal (1...125 decimal).
99 PPrrooffiibbuuss ccoonnnneeccttiioonn CCaabbllee lleeaaddss oouuttppuutt
Supply voltage (Power supply) Connect the Supply voltage to the lead 1 and 2 (0V ) and ( + VDC). Type: mA
Series ‐Nr. VDCSIG. 0V +V BUS ‐A BUS‐B BUS_
GND BUS_VDC
BUS ‐A BUS‐B �
Leadnr.
1 2 4 5 6 7 8 9 PH
Ex II 2G Ex d II C T6 PTB 09 ATEX 1106 XII 2D EX tD A21 IP6X T85°C CE 0102
Working temperature ‐40°…+60°C

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 10-12 of 16
Profibus lines A and B Connect the Profibus Input‐lines to lead 4 and 5 (BUS_A) and ( BUS_B) and for outgoing lines to lead 8 and 9. Type: mA
Series ‐Nr. VDCSIG. 0V +V BUS ‐A BUS‐B BUS_
GND BUS_VDC
BUS ‐A BUS‐B �
Leadnr.
1 2 4 5 6 7 8 9 PH
Ex II 2G Ex d II C T6 PTB 09 ATEX 1106 XII 2D EX tD A21 IP6X T85°C CE 0102
Working temperature ‐40°…+60°C
1100 BBuuss TTeerrmmiinnaattiioonn If the device represents the final station on the bus, then the looped‐through Profibus must be actively terminated at both ends with a bus termination resistor between A and B. At closed housings it is necessary to order with termination adjusted the right way, otherwise it is mandatory to adapt an external resistor. For a good signal transmission it is necessary to terminate PROFIBUS segments by a bus termination. For PROFIBUS RS 485 a bus termination consists of a combination of three resistors. Connect the Termination resistors to lead 8 and 9 (BUS_A) and ( BUS_B) and for the active power lines to lead 6 and 7. Type: mA
Series ‐Nr. VDC SIG. 0V +V BUS ‐A BUS‐B BUS_
GND BUS_ VDC
BUS ‐A BUS‐B �
Lead
nr. 1 2 4 5 6 7 8 9 PH
Ex II 2G Ex d II C T6 PTB 09 ATEX 1106 XII 2D EX tD A21 IP6X T85°C CE 0102
Working temperature ‐40°…+60°C
Active termination BUS_VDC lead 7 BUS Line lead 9 BUS Line lead 8 BUS_GND lead 6

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 11-13 of 16
1111 PPaarraammeetteerriissaattiioonn In order to carry out a general parameterisation of the device, it is necessary first to select a module from the GSD file (KUEB7068.GSD). Example: With the parameter telegram (except for the 25‐Bit configuration) the following can be defined:
- Code Sequence (Octet 9, Bit 0) o 0 = clockwise o 1 = counter clockwise
- Class 2 functionality (Octet 9, Bit 1)
o 0 = no o 1 = yes
- Scaling enabled (Octet 9, Bit 3)
o 0 = no o 1 = yes
- Scaling type (Octet 9, Bit 7)
o 0 = Standard (MUR + TMR) o 1 = Alternative (NDR + TMR)
- Scaling parameter MUR or NDR (Octets 10‐13)
o MUR = Measuring Units per Revolution o NDR = Number of Distinguished Revolutions
- Scaling parameter TMR (Octets 14‐17)
o TMR = Total Measuring Range

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 12-14 of 16
1122 SSccaalliinngg With Standard Scaling, scaling will be done as follows:
o With MUR and TMR o One revolution is equivalent exactly to MUR = TMR values
Positionscaled = ((Positionunscaled / Singleturn‐resolution) * MUR) % TMR With Alternative Scaling, scaling will be done as follows:
o With NDR and TMR o NDR revolutions are equivalent exactly to the TMR values
Positionscaled = ((Positionunscaled / (NDR * Singleturn‐resolution)) * TMR) % TMR
1. Code sequence CW Possible settings: Increasing clockwise (0) (CW) Increasing counter‐clockwise (1) (CCW) 2. Class 2 functionality on Class 2 must be turned on when scaling is active.

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 12-15 of 16
3. Scaling function control on When scaling is turned on – Position depends on the values MUR and TMR. 4. Scaling type
MUR+TMR
Scaling type (MUR + TMR) 5. Value for Resolution per
Revolution MUR Example: 3600 Steps per revolution

Technical Manual Absolute Single/Multiturn Profibus Encoders
R.000.000 13-16 of 16
6. Value for Total Resolution Example: Value for total resolution 36000 Position range: 0…36000 Revolutions 10 If the scaling values (TMR/MUR) cannot be divided without a rest there will be an error at the limits of the position values ( value < 0 and < maximum position). This can be avoid with a multiple value of MUR to TMR.
1133 DDeeffaauulltt sseettttiinnggss oonn ddeelliivveerryy On delivery the following parameters have been factory set. Description Setting Switch Baud rate automatic Not availableNode address 125 *At closed housings the switch is set to the preorded node address or
to 0xFF for “set station address” with software Termination OFF Switch setting off
Index (hex) Name Standard value Encoder Profile Set_prm 9 Operating Parameter Bit 3 Scaling on Class 2 on /CW Set_prm 10‐13 Measuring Units per Revolution 8192 (13 Bit) Set_prm 14‐17 Total Measuring Range 33554432 (25 Bit)
If errors have occurred during programming of the objects and if these parameters have been saved in the EEPROM, it will not be possible to address the encoder next time it is switched on; this error can be cleared only by means of a general Reset of the encoder.

NNoottiiccee tteecchhnniiqquuee
Codeurs absolus
monotour/multitours
ATEX Série 70X8
PPrrooffiibbuuss DDPP--DDIINN 1199224455--33

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 2 de 16
©© FFrriittzz KKüübblleerr GGmmbbHH
Droits d’auteur
Les droits d’auteur de la présente documentation sont protégés par la société Fritz Kübler GmbH. La présente
documentation ne peut être ni modifiée, ni étendue, ni dupliquée, ni transmise à des tiers sans l’autorisation
écrite de la société Fritz Kübler GmbH.
Réserve de modifications
Dans le cadre de nos efforts d’amélioration permanente de nos produits, nous nous réservons le droit d’apporter
à tout moment des modifications techniques aux informations techniques contenues dans le présent document.
Aucune garantie Fritz Kübler GmbH ne donne aucune garantie, implicite ou explicite, en rapport avec l’ensemble de la présente
notice (original en langue allemande et traduction en langue française), et décline toute responsabilité en cas de
dommages directs ou indirects.
Informations sur le document Indice de modification 03-2010
Copies d’écran utilisées Profibus Master Tool Sté. Bihl & Wiedemann
Fritz Kübler GmbH Schubertstr.47 78054 VS-Schwenningen / Germany
Tel. +49 (0) 7720-3903-0
Fax +49 (0) 7720-21564
E-Mail: [email protected]
Internet: www.kuebler.com

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 3 de 16
Sommaire
1 GÉNÉRALITÉS .......................................................................................... 4
BASES DE PROFIBUS-DP ........................................................................................................................................................ 4 EXIGENCES ............................................................................................................................................................................ 4 CARACTÉRISTIQUES ................................................................................................................................................................. 4 FONCTIONS DE PROTECTION ...................................................................................................................................................... 4
2 MISE EN SERVICE .................................................................................... 5
3 INFORMATIONS GÉNÉRALES SUR LE CÂBLAGE........................................ 5
INFORMATIONS D’INSTALLATION POUR RS-485............................................................................................................................. 5
4 MISE À LA TERRE ET LIAISON ÉQUIPOTENTIELLE ..................................... 6
5 CARACTÉRISTIQUES DE PROFIBUS .......................................................... 7
NUMÉRO D’IDENTIFIANT PNO................................................................................................................................................... 7 PHASE DE DÉMARRAGE DU CODEUR SUR PROFIBUS ...................................................................................................................... 7 CONFIGURATION ET PARAMÉTRAGE............................................................................................................................................. 7 CONFIGURATION..................................................................................................................................................................... 7
6 PROFIL D’APPAREIL - PROFILE FOR ENCODER V1.1.................................. 8
CONFIGURATION..................................................................................................................................................................... 8
7 PROFIL CODEUR PROFIBUS 3062 (VERSION 1.1)...................................... 9
RÉGLAGE DU PRÉPOSITIONNEMENT ............................................................................................................................................. 9 VALEURS DE VITESSE ................................................................................................................................................................ 9 DIAGNOSTIC ÉTENDU ............................................................................................................................................................. 10 1. PROFIL D’APPAREIL POUR CODEURS ....................................................................................................................................... 10
Classe 1 obligatoire pour tous les codeurs DP ............................................................................................................... 10
Classe 2 Fonctionnalités en option ................................................................................................................................ 10
8 SET SLAVE ADDRESS (SSA – RÉGLAGE DE L’ADRESSE DE L’ESCLAVE)) .... 11
9 RACCORDEMENT PROFIBUS SORTIE DES CÂBLES ................................. 11
TENSION D’ALIMENTATION (ALIMENTATION ÉLECTRIQUE)............................................................................................................... 11 EX ..................................................................................................................................................................................... 11 PROFIBUS LIGNES A ET B......................................................................................................................................................... 12 EX ..................................................................................................................................................................................... 12
10 TERMINAISON DU BUS ......................................................................... 12
11 PARAMÉTRAGE..................................................................................... 13
12 ECHELLE ................................................................................................ 14
13 RÉGLAGES PAR DÉFAUT À LA LIVRAISON .............................................. 16
PROFIL CODEUR.................................................................................................................................................................... 16

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 4 de 16
11 GGéénnéérraalliittééss
Bases de PROFIBUS-DP
Cette notice documente l’implémentation du protocole de transmission PROFIBUS-DP en mode esclave sur nos
appareils. Il faut noter que l’étendue des fonctionnalités décrites peut être limitée selon les appareils ou les cas
d’utilisation. En règle générale, une étendue de fonctions plus restreinte est utilisée en particulier lors des
conversions de protocole !
Exigences
Au niveau hiérarchique le plus bas, la communication entre le process décentralisé et la commande centralisée
via le système de communication s’effectue par l’intermédiaire du bus de terrain ou de process. A ce niveau, les
exigences portent essentiellement sur la simplicité des séquences du protocole et des temps de transfert courts
lors de la communication. Ces exigences garantissent un temps de réaction du système le plus court possible aux
états dynamiques des périphériques. En plus de l’échange classique de données en E/S, une transmission
acyclique de données de paramètres, de diagnostic et de configuration doit être possible sans affecter de manière
sensible les possibilités de travail en temps réel du bus. Ce n’est qu’ainsi qu’un bon concept de diagnostic pourra
être implémenté et que la sécurité de fonctionnement pourra être garantie.
Caractéristiques La tâche principale de PROFIBUS-DP est la transmission cyclique des données process du système de commande
vers les périphériques et vice-versa. La procédure d’accès se base sur le principe Maître-Esclave. Un maître s’adresse
successivement en mode polling aux appareils esclaves du bus qui lui sont subordonnés. L’échange de données est
initié par un télégramme de requête et se termine par un télégramme d’acquittement émis par l’esclave contacté.
Un esclave ne devient donc actif que sur requête du maître. Un accès simultané au bus est ainsi évité. La procédure
d’accès hybride de PROFIBUS permet un fonctionnement combiné de plusieurs maîtres du bus et même le
fonctionnement mixte de PROFIBUS DP et de PROFIBUS-FMS dans une même section de bus. La condition préalable
à ce fonctionnement mixte est la configuration correcte du système de bus et l’affectation univoque des appareils
esclaves aux maîtres. PROFIBUS-DP distingue deux types de maîtres. Le maître de Classe 1 réalise la transmission
cyclique de données de fonctionnement et fournit les données utilisateur. Un maître de Classe 2 muni de certaines
fonctions peut s’adresser au maître de Classe 1. Un accès direct aux esclaves n’est pas permis. Les fonctions se
limitent dans ce cas à des services d’assistance comme p. ex. la lecture des informations de diagnostic d’esclaves.
C’est pourquoi un maître de classe 2 se comprend comme un appareil de programmation ou de diagnostic.
Fonctions de protection
PROFIBUS-DP dispose de nombreuses fonctions de protection. Elles garantissent la sécurité de la communication
dans l’environnement rude des périphériques décentralisés non seulement pendant le fonctionnement sans
défauts, mais aussi en cas de perturbations externes ou de défaillances de périphériques. Des erreurs de
paramétrage sont détectées immédiatement, les périphériques au paramétrage erroné n’étant pas intégrés dans
les échanges de données de fonctionnement. La défaillance de périphériques est enregistrée par le maître et signalée à l’utilisateur au moyen d’un message de
diagnostic global. La défaillance de la ligne de communication est détectée par les esclaves au moyen d’une
surveillance du temps ; elle entraîne la mise hors fonction des sorties. Les perturbations CEM sont filtrées quasiment en intégralité grâce au signal différentiel du procédé de
transmission selon RS485 particulièrement résistant aux parasites. Les erreurs de transmission de données sont détectées grâce aux contrôles de trame et des sommes de contrôle ;
elles entraînent une répétition du télégramme.

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 5 de 16
22 MMiissee eenn sseerrvviiccee
Avant de pouvoir mettre un système PROFIBUS-DP en service, tous les appareils raccordés, y compris le système
maître, doivent recevoir des adresses de bus univoques. Ce n’est qu’ainsi que l'adressage univoque dans le bus
pourra avoir lieu. Les adresses doivent être attribuées en premier lieu via le bus.
Les réglages physiques du système sont réalisés à l’aide du jeu de paramètres du maître. Celui-ci comporte, en plus de
l’adresse bus du maître, p. ex. la vitesse de transmission, les temps de timeout et le nombre de répétitions des
émissions. En plus du jeu de paramètres du maître, il faut sauvegarder un jeu de données esclave pour chaque esclave à
activer. Un jeu de données comporte les données de paramétrage et de configuration de l’esclave, ainsi que le pointeur
d’adresse pour l’archivage logique des données d’E/S. Si les jeux de paramètres sont disponibles, le système maître
commence, sur requête de l’utilisateur ou automatiquement, à mettre les esclaves en service les uns après les autres.
Déjà les premiers cycles de diagnostic indiquent les esclaves présents sur le bus. Seuls les esclaves qui ont répondu
correctement lors du cycle de diagnostic sont ensuite paramétrés lors des cycles de paramétrage à l’aide des données
les concernant mémorisées dans le maître. Si le paramétrage s’est effectué sans défaut, les cycles de configuration
comparent les données de configuration de consigne du maître et les données de configuration réelles de l’esclave.
Après le dernier cycle de diagnostic, tous les esclaves qui n’ont pas détecté d'erreur lors de la comparaison sont prêts à
fonctionner. Chacun de ces esclaves est alors intégré par le maître dans la transmission de données de fonctionnement.
Le maître fournit pour chaque esclave, à des fins de diagnostic, une mémoire tampon de diagnostic pouvant être
lue par l’utilisateur. Un diagnostic simplifié est permis par un champ de diagnostic global indiquant bit par bit si un
esclave a préparé des données de diagnostic ou non.
33 IInnffoorrmmaattiioonnss ggéénnéérraalleess ssuurr llee ccââbbllaaggee
Informations d’installation pour RS-485
Tous les appareils sont raccordés dans une structure de bus (ligne). Un segment permet de connecter jusqu’à 32
appareils ensemble (maîtres ou esclaves). Le bus est terminé au début et à la fin de chaque segment par une
terminaison de bus active (résistance terminale). Il faut veiller, pour un fonctionnement sans défaut, à ce que les
deux terminaisons de bus soient toujours alimentées en courant. La terminaison de bus est réalisée dans
l’appareil ou dans le connecteur ; elle peut être activée ou non.
Si plus de 32 appareils sont raccordés au bus, il faut mettre en place des répéteurs (amplificateurs de puissance)
pour relier les différents segments du bus.
Raccordement des nœuds Les nœuds sont reliés aux câbles du réseau local par l’intermédiaire de connecteurs bus ou de câbles, de borniers
bus ou de répéteurs RS-485.
Terminaison des câbles Chaque segment de bus présenter à ses deux extrémités une terminaison avec son impédance caractéristique.
Cette terminaison de câble est intégrée sans les répéteurs RS-485, les borniers bus, les ILM (modules de liaison
infrarouge) et les connecteurs bus ; elle peut être activée si nécessaire. Le composant doit être alimenté avant
que sa terminaison de câble puisse être activée. Pour les borniers bus et les connecteurs bus, cette alimentation
est assurée par l’équipement raccordé, alors que les répéteurs RS-485, les ILM et les résistances terminales
disposent de leur propre alimentation. La technique de communication RS-485 permet le raccordement de 32
appareils (équipements et répéteurs) au maximum par segment de bus. La longueur de câble maximale autorisée
pour un segment dépend de la vitesse de transmission et du câble réseau utilisé.

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 6 de 16
44 MMiissee àà llaa tteerrrree eett lliiaaiissoonn ééqquuiippootteennttiieellllee
Une mise à la terre et une liaison équipotentielle efficaces sont essentielles à la protection des réseaux PROFIBUS
contre les interférences. Le mise à la terre et la liaison équipotentielle servent principalement à assurer le bon
fonctionnement de PROFIBUS et pas à assurer sa sécurité. Une bonne mise à la terre du blindage des câbles
assure la réduction des interférences électrostatiques, minimisant ainsi les perturbations. La liaison
équipotentielle assure un potentiel de terre identique sur l’ensemble du réseau. Ceci évite le passage de courants
à la terre dans le blindage des câbles PROFIBUS. Les informations ci-dessous donnent des indications d’ordre
général pour la mise à la terre et le liaison équipotentielle.
Sur la station PROFIBUS Relier le blindage du câble PROFIBUS à la liaison équipotentielle sur chaque station PROFIBUS.
S’il est utilisé, le connecteur PROFIBUS assure le raccordement du blindage du câble. Il faut cependant veiller dans
ce cas à raccorder correctement le blindage dans le connecteur.

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 7 de 16
55 CCaarraaccttéérriissttiiqquueess ddee PPrrooffiibbuuss
Numéro d’identifiant PNO
Le codeur absolu monotour/multitours Sendix porte le numéro d’identifiant PNO 5868 (Hex). Ce numéro est
déposé auprès de la PNO (Organisation des Utilisateurs de Profibus) en tant qu’identifiant unique. Les fichiers
GSD correspondants portent les noms suivants :
• Série multitours 7068,7088 KUEB7068.GSD
• Séries monotour 7058,7078 KUEB7058.GSD
Phase de démarrage du codeur sur PROFIBUS
Au démarrage du codeur, celui-ci se trouve dans l’état ‘Baud-Search’. Après la détection de la vitesse de
transmission, il passe dans l’état WAIT_PRM et attend les données de paramétrage du maître DP. Le paramétrage
s’effectue automatiquement lors du démarrage du maître DP. Les paramètres suivants sont transmis au codeur :
sens de comptage et longueur de mesure en pas (voir le profil codeur de la PNO pour davantage de détails). Après
le succès du transfert des données de paramétrage correctes, le codeur passe dans l’état WAIT_CFG. Le maître
PROFIBUS envoie alors un octet de configuration pour définir le nombre d’entrées/sorties. Si l’octet de
configuration est correct, le codeur passe dans l’état DATA_EXCHANGE.
Configuration et paramétrage
Le paramétrage, c’est-à-dire la transmission des paramètres du sens de comptage, de la résolution du codeur,
etc., s’effectue généralement à l’intérieur du programme de configuration pour le maître PROFIBUS utilisé. Il faut
pour cela copier le fichier de type ou le fichier GSD (données de base de l’appareil) respectivement dans le
répertoire des fichiers de type ou dans le répertoire des fichiers GSD. Pour certains programmes, comme p. ex.
COM PROFIBUS ou STEP7 Manager, il faut réaliser dans le logiciel une mise à jour de la liste d’appareils interne
(catalogue hardware). Vous trouverez davantage d’informations sur l’intégration d’appareils de terrain dans la
documentation du logiciel que vous utilisez.
L’intégration et le paramétrage du codeur dans un système maître exige en général l’exécution des deux étapes
suivantes dans le programme de configuration :
Configuration
Pour la configuration, c’est-à-dire la saisie de la longueur et du type des E/S sur PROFIBUS, le programme de
configuration fournit en général un masque de saisie dans lequel l’identifiant est normalement prédéfini par défaut
– indépendamment de la configuration désirée– de sorte qu’il n’y a plus qu’à saisir les adresses d’E/S. En fonction
de la configuration désirée, le codeur occupe sur PROFIBUS un nombre différent de mots d’entrée et de sortie.
Les paramètres décrits ci-dessous dépendent également de la configuration désirée. Le ficher GSD de l’appareil
(p. ex. KUEB7068.GSD) comprend cinq configurations de consigne pour PNO Classe 1 et 2, chacun avec une
résolution de 16 et 32 bits.

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 8 de 16
66 PPrrooffiill dd’’aappppaarreeiill -- PPrrooffiillee ffoorr EEnnccooddeerr VV11..11
Ce profil fournit une définition de l’interface pour les codeurs indépendante des constructeurs et obligatoire. Ce
profil définit les fonctions Profibus à utiliser, ainsi que la manière de les utiliser. Cette norme permet la
réalisation d’un système de bus ouvert et indépendant des constructeurs.
Le profil d’appareil se décompose en deux classes d’objets :
• La Classe C1 décrit l’ensemble des fonctions de base
dont le codeur doit être muni
• La Classe C2 comporte de nombreuses fonctions
étendues qui doivent être supportées par les codeurs
de cette classe (Mandatory-obligatoires) ou qui sont en
option. Les appareils de la classe C2 disposent ainsi de
toutes les fonctions C1 et C2 obligatoires et d’autres
fonctions optionnelles dépendant du constructeur. Le
profil définit en outre une plage d’adresses pouvant
être occupées par des fonctions spéciales spécifiques
au constructeur.
Configuration
Le programme de configuration fournit en général un masque de saisie pour le paramétrage (la saisie) des
données de résolution, de sens de comptage, etc. Les différents modules sont énumérés ci-dessous :
Configurations disponibles pour le fonctionnement normal du codeur :
- 32 bits Entrée/Sortie, cohérent - 32 bits Entrée, cohérent - 16 bits Entrée/Sortie, cohérent - 16 bits Entrée, cohérent - MUR=13 bits et TMR=25 bits (32 bits Entrée/Sortie, cohérent) - toutes peuvent se combiner avec la vitesse (trs/min) 16 bits cohérent ou la vitesse (unités/sec)
32 bits cohérent

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 9 de 16
77 PPrrooffiill CCooddeeuurr PPrrooffiibbuuss 33006622 ((VVeerrssiioonn 11..11))..
Class 2 32-Bit resolution, Input/Output consistent (Classe 2 résolution 32 bits, Entrée/Sortie, cohérent) :
le codeur utilise 2 mots d’entrée et 2 mots de sortie transmis de manière cohérente via le bus.
Class 2 32-Bit resolution, Input consistent (Classe 2 résolution 32 bits, Entrée, cohérent) :
le codeur utilise 2 mots d’entrée transmis de manière cohérente via le bus.
Class 1 16-Bit resolution, Input/Output consistent (Classe 1 résolution 16 bits, Entrée/Sortie, cohérent) :
le codeur utilise 1 mot d’entrée et 1 mot de sortie transmis de manière cohérente via le bus.
Class 1 16-Bit resolution, Input consistent (Classe 1 résolution 16 bits, Entrée, cohérent) :
le codeur utilise 1 mot d’entrée transmis de manière cohérente via le bus.
Combinaison de :
Class 2 32-Bit resolution, Input consistent Speed in (units/s) (Classe 2 résolution 32 bits, Entrée, cohérent Vitesse
en (unités/sec)) ou
Class 2 16-Bit resolution, Input consistent Speed in (rpm) (Classe 2 résolution 16 bits, Entrée, cohérent Vitesse en
(trs/min))
Le codeur utilise au maximum 2 mots d’entrée transmis de manière cohérente via le bus.
Réglage par défaut : facteur d’échelle activé, résolution totale 25 bits
Classe 2 Résolution 32 bits MUR=13bits; TMR=25 bits :
Réglage du prépositionnement
En mode ‘Classe 2’, le codeur peut être réglé via PROFIBUS à une valeur de position quelconque dans la plage de
valeurs de 27 bits ou 15 bits. Cette opération s’effectue en mettant à 1 le bit de poids le plus fort (MSB) des données de sortie (2^31 pour la configuration Classe 2 - 32 bits ou 2^15 pour la configuration Classe 2 - 16 bits).
La valeur de prépositionnement transmise dans les octets de données 0 – 3 est prise en compte comme valeur de
position avec le flanc montant du bit 32 (=bit 7 de l’octet de données 3). Le codeur continue alors de compter à
partir de cette position. Un nouveau réglage n’est possible qu’après remise à zéro du bit de commande. Cette
opération n’est pas acquittée par les entrées.
Valeurs de vitesse
Tous les modules peuvent être configurés avec une valeur de vitesse supplémentaire. Les mots d’entrée sont
étendus jusqu’à une longueur maximale de 8 octets (64 bits) en fonction de la configuration de la valeur de
vitesse. La valeur de la vitesse est signée, le signe dépendant du sens de rotation.
Valeurs positives dans le sens horaire, valeurs négatives dans le sens antihoraire.
Format : « Big Endian »
Mot d’entrée Mot d’entrée
Octet 0 Octet 1 Octet 2 Octet 3 Format Max.
0 0 Trs/min 0
17 70 Trs/min 6000
E8 90 Trs/min -6000
00 63 FF 9C Unités/sec 6553500
FF 9C 00 64 Unités/sec - 6553500

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 10 de 16
Limites de vitesse :
Codeur monotour : 600 trs/min la valeur FFFFh est émise pour des vitesses supérieures. Codeur multitours : 12000 trs/min la valeur FFFFh est émise pour des vitesses supérieures
Diagnostic étendu
1. Profil d’appareil pour codeurs
CCllaassssee 11 oobblliiggaattooiirree ppoouurr ttoouuss lleess ccooddeeuurrss DDPP
Fonction Octet n° Type de données Nom
Data_Exchange 1-4 Non signé 32 Valeur de position (entrée)
Data_Exchange 1-4 Non signé 32 Valeur de prépositionnement (sortie)
Data_Exchange 1-4 Non signé 32 Valeur de vitesse (entrée) (unités/sec)
Data_Exchange 1-4 Non signé 16 Valeur de vitesse (sortie) (trs/min)
RD_inp 1-4 Non signé 32 Valeur de position
RD_inp 1-4 Non signé 32 Valeurs de vitesse
Slave_Diag 7 Chaîne octet En-tête diagnostic externe
Slave_Diag 8 Chaîne octet Alarmes
Slave_Diag 9 Chaîne octet Etat de fonctionnement
Slave_Diag 10 Chaîne octet Type de codeur
Slave_Diag 11-14 Non signé 32 Résolution monotour
Slave_Diag 15,16 Non signé 16 Nombre de tours
Set_prm 9 Chaîne octet Paramètres de fonctionnement
CCllaassssee 22 FFoonnccttiioonnnnaalliittééss eenn ooppttiioonn
Fonction Octet n° Type de données Nom
Slave_Diag 17 Chaîne octet Alarmes supplémentaires
Slave_Diag 18,19 Octet String Supported Alarms
Slave_Diag 20,21 Chaîne octet Avertissements
Slave_Diag 22,23 Chaîne octet Avertissements supportés
Slave_Diag 24,25 Chaîne octet Version de Profil
Slave_Diag 26,27 Chaîne octet Version de logiciel
Slave_Diag 28-31 Non signé 32 Temps de fonctionnement
Slave_Diag 32-35 Signé 32 Valeur d’offset
Slave_Diag 36-39 Signé 32 Valeur d’offset du constructeur
Slave_Diag 40-43 Non signé 32 Unités de mesure par tour
Slave_Diag 44-47 Non signé 32 Plage de mesure totale en unités de mesure
Slave_Diag 48-57 Chaîne ASCII Numéro de série
Set_prm 10-13 Non signé 32 Unités de mesure par tour
Set_prm 14-17 Non signé 32 Plage de mesure totale en unités de mesure

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 11 de 16
88 SSeett SSllaavvee AAddddrreessss ((SSSSAA –– RRééggllaaggee ddee ll’’aaddrreessssee ddee ll’’eessccllaavvee))))
Le Service Access Point (point d’accès service) « SAP 55 Set_Slave_Address » ne peut être utilisé que par un
maître de classe 2 lors de la séquence de démarrage Profibus. Réglage par défaut après la mise sous tension :
adressse 125 (0x7D) pour SSA_Support.
Uniquement des adresses valides seront enregistrées dans une mémoire non volatile et seront activées .
Le numéro de nœud 0 est réservé et ne doit pas être utilisé pour définir un nœud. Les numéros de nœud
résultants se trouvent dans la plage 1...7Dh hexadécimal (1…125 décimal).
99 RRaaccccoorrddeemmeenntt PPrrooffiibbuuss SSoorrttiiee ddeess ccââbblleess
Tension d’alimentation (alimentation électrique) Relier la tension d’alimentation aux fils 1 et 2 (0V ) et ( + VDC).
Type: mA
N° de série VDC
SIG. 0V +V BUS -A BUS-B BUS_
GND
BUS_
VDC
BUS -A BUS-B
Câble
n°. 1 2 4 5 6 7 8 9 PH
Ex II 2G Ex d II C T6 PTB 09 ATEX 1106 X II 2D EX tD A21 IP6X T85°C CE 0102
Temp. de fonctionnement
-40°…+60°C
Nota: SAP 55 est optionnel et peut être désactivé si l'esclave ne dispose pas d'une mémoire
non volatile pour l'adresse de la station

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 12 de 16
Profibus lignes A et B Relier les lignes d’entrée Profibus aux fils 4 et 5 (BUS_A) et ( BUS_B) et les lignes de sortie aux fils 8 et 9.
Type: mA
N° de série VDC
SIG. 0V +V BUS -A BUS-B BUS_
GND
BUS_
VDC
BUS -A BUS-B
Câble
n° 1 2 4 5 6 7 8 9 PH
Ex II 2G Ex d II C T6 PTB 09 ATEX 1106 X II 2D EX tD A21 IP6X T85°C CE 0102
Temp. de fonctionnement
-40°…+60°C
1100 TTeerrmmiinnaaiissoonn dduu bbuuss
Si l’appareil est la dernière station du bus, il faut terminer de manière active le Profibus bouclé à ses deux
extrémités au moyen d’une résistance terminale de bus placée entre A et B.
Sur les appareils fermés, l’activation de la terminaison doit être indiquée à la commande ; dans le cas contraire, la
terminaison doit être réalisée en externe au moyen d’une résistance. La bonne transmission du signal exige la
terminaison des segments de bus PROFIBUS au moyen de résistances terminales. Pour PROFIBUS RS-485, la
terminaison de bus se compose d’une combinaison de trois résistances.
Connecter les résistances terminales aux fils 8 et 9 (BUS_A) et ( BUS_B) et, pour les lignes de puissance actives,
aux fils 6 et 7.
Type: mA
N° de série VDC
SIG. 0V +V BUS -A BUS-B BUS_
GND
BUS_
VDC
BUS -A BUS-B
Câble
n° 1 2 4 5 6 7 8 9 PH
Ex II 2G Ex d II C T6 PTB 09 ATEX 1106 X II 2D EX tD A21 IP6X T85°C CE 0102
Temp. de fonctionnement
-40°…+60°C
Terminaison active BUS_VDC fil 7
Ligne BUS fil 9
Ligne BUS fil 8
BUS_GND fil 6

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 13 de 16
1111 PPaarraammééttrraaggee
Pour réaliser un paramétrage général de l’appareil, sélectionner en premier lieu un module dans le ficher GSD
(KUEB7068.GSD).
Exemple :
Le télégramme de paramétrage permet de définir les données suivantes (sauf pour la configuration 25 bits) :
- Séquence de code (octet 9, bit 0) o 0 = sens horaire
o 1 = sens antihoraire
- Fonctionnalités de Classe 2 (octet 9, bit 1) o 0 = non
o 1 = oui
- Activation de l’échelle (octet 9, bit 3) o 0 = non
o 1 = oui
- Type d’échelle (octet 9, bit 7) o 0 = Standard (MUR + TMR) o 1 = Alternatif (NDR + TMR)
- Paramètre d’échelle MUR ou NDR (octets 10-13) o MUR Measuring Units per Revolution (Unités de mesure par tour) o NDR = Number of Distinguished Revolutions (Nombre de tours distincts)
- Paramètre d’échelle TMR (octets 14-17) o TMR = Total Measuring Range (Plage de mesure totale)

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 14 de 16
1122 EEcchheellllee
Pour une échelle standard, procéder comme suit :
o Avec MUR et TMR
o Un tour correspond exactement à MUR = valeurs TMR
Positionéchelle = ((Positionsans échelle / Résolution monotour) * MUR) % TMR
Pour une échelle alternative, procéder comme suit :
o Avec NDR et TMR
o NDR tours correspondant exactement aux valeurs TMR
Positionéchelle = ((Positionsans échelle / (NDR * Résolution monotour)) * TMR) % TMR
1. Code sequence (séquence de code) sens horaire
Réglages possibles :
Increasing clockwise (0) (sens horaire)
Increasing counter-clockwise (1) (sens antihoraire)
2. Class 2 functionality on (activation des fonctionnalités Classe 2)
Si l’échelle est active, la Classe 2 doit être activée.

Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 15 de 16
3. Scaling function control (commande de la fonction d’échelle) activée
Echelle activée – la position dépend des
valeurs de MUR et TMR.
4. Scaling type (type d’échelle) MUR+TMR
Type d’échelle (MUR + TMR)
5. Valeur de résolution par tour MUR
Exemple : 3600 pas par tour
Notice technique Codeurs absolus monotour/multitours Profibus
R.000.000 16 de 16
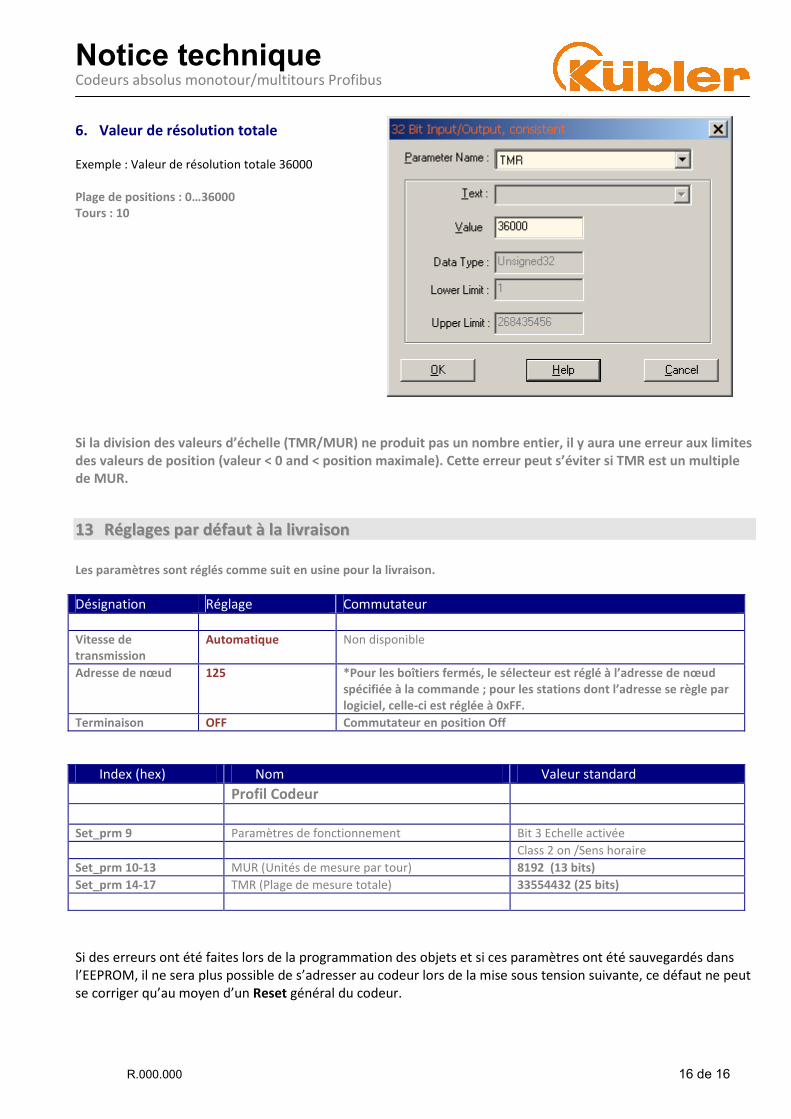
6. Valeur de résolution totale
Exemple : Valeur de résolution totale 36000
Plage de positions : 0…36000 Tours : 10
Si la division des valeurs d’échelle (TMR/MUR) ne produit pas un nombre entier, il y aura une erreur aux limites des valeurs de position (valeur < 0 and < position maximale). Cette erreur peut s’éviter si TMR est un multiple de MUR.
1133 RRééggllaaggeess ppaarr ddééffaauutt àà llaa lliivvrraaiissoonn
Les paramètres sont réglés comme suit en usine pour la livraison.
Désignation Réglage Commutateur
Vitesse de transmission
Automatique Non disponible
Adresse de nœud 125 *Pour les boîtiers fermés, le sélecteur est réglé à l’adresse de nœud spécifiée à la commande ; pour les stations dont l’adresse se règle par logiciel, celle-ci est réglée à 0xFF.
Terminaison OFF Commutateur en position Off
Index (hex) Nom Valeur standard
Profil Codeur Set_prm 9 Paramètres de fonctionnement Bit 3 Echelle activée
Class 2 on /Sens horaire
Set_prm 10-13 MUR (Unités de mesure par tour) 8192 (13 bits)
Set_prm 14-17 TMR (Plage de mesure totale) 33554432 (25 bits)
Si des erreurs ont été faites lors de la programmation des objets et si ces paramètres ont été sauvegardés dans
l’EEPROM, il ne sera plus possible de s’adresser au codeur lors de la mise sous tension suivante, ce défaut ne peut
se corriger qu’au moyen d’un Reset général du codeur.