team: 1/c campbell, 1/c lewis, 1/c londoño, 1/c smythe, 1/c mayer, 1/c dedinger
TRANSCRIPT

Team: 1/C Campbell, 1/C Lewis, 1/C Londoño, 1/C Smythe, 1/C Mayer, 1/C Dedinger

ParkinsonSAT - USNA PRIMARY MISSION
Satellite for data exfoliation ODTML for DOD ocean buoys Remote sensor data in the Amateur Satellite Service A comms transponder in continuation of PCSat Mission
Educational transponder support for other schools and universities
SECONDARY MISSION Support the MiDN experiment
Measure radiation levels in orbit using dosimeter Support a UHF RFI mitigation receiver
Locate and identify interference to Navy UHF satellites Support SPID
Small Particle Impact Detector (former LADD-C project)

ParkinsonSAT - USNA

ParkinsonSAT - USNA

ParkinsonSAT - USNAUHF RFI Mitigation Experiment

ParkinsonSAT – Configuration Management/Documentation P-SAT Design Paper- Campbell
Requirements and Verification Document- Londoño
P-SAT Frequency Request Form- Londoño
Specification Document- Londoño
Interface Control DocumentsODTML- Okun
SPID - Campbell
UHF-RFI- Lindsay

ParkinsonSAT – Drawing List
Drawing Number: Name: Description
ASSEMBLY DRAWINGS
NA-PK-SY-A- Bulkhead Assembly 4 Bulkheads Mated
NA-PK-SY-A- Sidepanel Assembly 4 Panels Mated
NA-PK-SY-A- Antenna mount Antennas mounted on cube
NA-PK-SY-A- ODTML Assembly Box assembled
Summary of Drawings:Assembly(4)Side-Panel (12)Bulkhead (8)Antenna (2)EPS (5)Comms (6)MIDN (3)ODTML (3)ADCS (3)RFI (3)Sep (2)Propulsion (2)Transponder (2)

ParkinsonSAT - USNA
Communications Package
Dual Redundant System – System A and B
Desired - a structure to contain Receivers (2), Transmitter, TNC, and system control board.
Structure is self-contained and capable of being used on missions other than ParkinsonSat (MidSTAR-2)
Progress: Developed initial concept for box structure

ParkinsonSAT - USNA
Comms Transponder Box - Initial Concept

ParkinsonSAT - USNA
Side 1
Receivers (2)
Transmitter
Interference/Control Board

ParkinsonSAT - USNA
Side 2
TNC
Mechanism for Securing TNC
Interference connectors

ParkinsonSAT - USNA
Thermal Control:
Heat Sink transfer to frameThermal compound to satellite structureBlack anodized
ParkinsonSAT - USNA
Ideas modelConnectorsWiring harnessVibrations TestPreparation for Space:
Staking componentsConformal coating
Still to do:

ParkinsonSAT–Sun Pointing Design
Sides Panel Cost=$200
Top Panel Cost=$9000

Pointing requirements are relaxed +/- 40 deg
High precision vector math not required
Paquette
ODTML off (4.5 W)
ODTML on (18W)
ParkinsonSAT-Sun Pointing Attitude Control System

ParkinsonSAT - USNA
PC Sat Panel $20/wattEMCOR University Cells $500/watt

ParkinsonSAT - USNA
Separation Device

ParkinsonSAT - Structure
Battery Cells
Internal Bulkhead
Solar Panel
NEA Location
Payload Bay
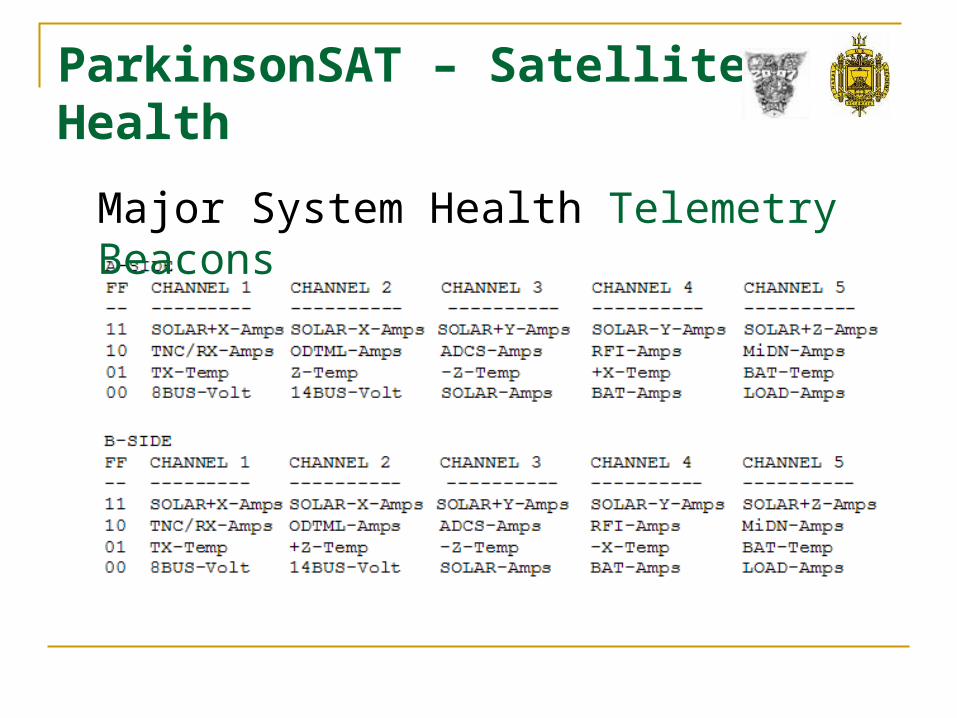
ParkinsonSAT – Satellite Health
Major System Health Telemetry Beacons
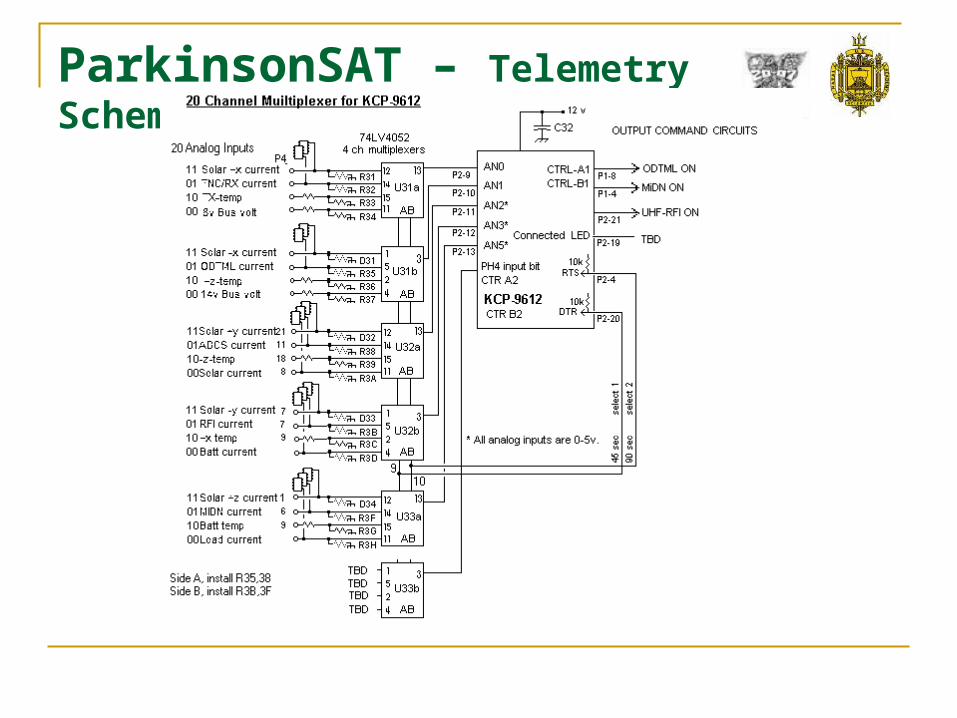
ParkinsonSAT – Telemetry Schematic

ParkinsonSAT – EPS Block Diagram
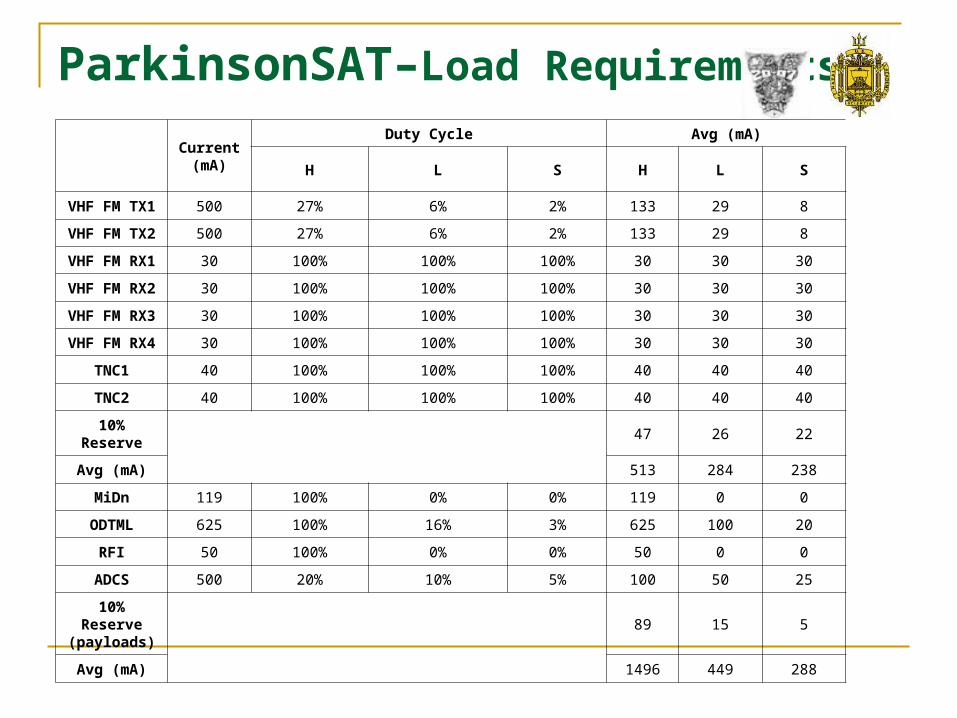
ParkinsonSAT–Load Requirements
Current
(mA)
Duty Cycle Avg (mA)
H L S H L S
VHF FM TX1 500 27% 6% 2% 133 29 8
VHF FM TX2 500 27% 6% 2% 133 29 8
VHF FM RX1 30 100% 100% 100% 30 30 30
VHF FM RX2 30 100% 100% 100% 30 30 30
VHF FM RX3 30 100% 100% 100% 30 30 30
VHF FM RX4 30 100% 100% 100% 30 30 30
TNC1 40 100% 100% 100% 40 40 40
TNC2 40 100% 100% 100% 40 40 40
10% Reserve 47 26 22
Avg (mA) 513 284 238
MiDn 119 100% 0% 0% 119 0 0
ODTML 625 100% 16% 3% 625 100 20
RFI 50 100% 0% 0% 50 0 0
ADCS 500 20% 10% 5% 100 50 25
10% Reserve (payloads)
89 15 5
Avg (mA) 1496 449 288

ParkinsonSAT – Charging Current
Isa (mA)Ie
(mA)Id (mA) Id-Ie (mA)
2500 250 1926 1676
2500 500 1726 1226
2500 750 1527 777
2500 1000 1327 327
2500 1250 1128 -122
2500 1500 928 -572
2500 1750 729 -1021
2500 1496 931 -565 H
2500 449 1767 1318 L
2500 288 1895 1607 S
ParkinsonSAT - USNABUDGET Solar Panels $8k for Emcor cells
$2k for PCsat style cells Machining $5k Anodizing and Coatings $2k Flight Hardware $5k Proto/Test/Spares HW $10k Vib/TVAC at NRL $5k Travel (Prof. Bruninga) $3k Travel (Midshipmen) $4k Miscellaneous $2k Alumni Tax $3k________________________________________Total $50k
ParkinsonSAT - USNAParts Procurement Kyocera Mini Solar Panels
Purchased 30 of them, $24 each -> $720 3-Axis Magnetometer
Purchased 8 of them, $55 a piece ->$440 High Speed Transmitters and Receivers
Purchased 4 Xmitters, 6 Receivers, $220 a piece -> $2200

ParkinsonSAT - USNASolar Panel Acceptance Testing
Psat Solar Panel I-V Curve
0
10
20
30
40
50
60
70
80
90
0 2 4 6 8 10 12Voltage (Volts)
Cu
rren
t (m
A)
Side 1 Side 2
Over 91% of the solar panels tested were within 3% of the voltage of the reference panel.
100% were within 5%.
ParkinsonSAT-Attitude Determination and Control
CPU Controlled Uses solar panels and magnetometer to determine
attitude Commands momentum wheels and magnetic
torquing coils to maintain sun pointing attitude

ParkinsonSAT- 3-Axis Magnetometer
• 500uA @ 3.3V DC• Field
measurement range +/-1100uT
• Resolution as low as 0.015uT

ParkinsonSAT - USNAX Axis Calibration with Compass at 0 Degrees
y = -0.0413x + 0.528
R2 = 0.9641-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
0 20 40 60 80 100
Angle of Sensor
Sen
sor
X V
alu
e O
utp
ut
Testing indicates sensor has an accuracy of ± 5% for roll and pitch
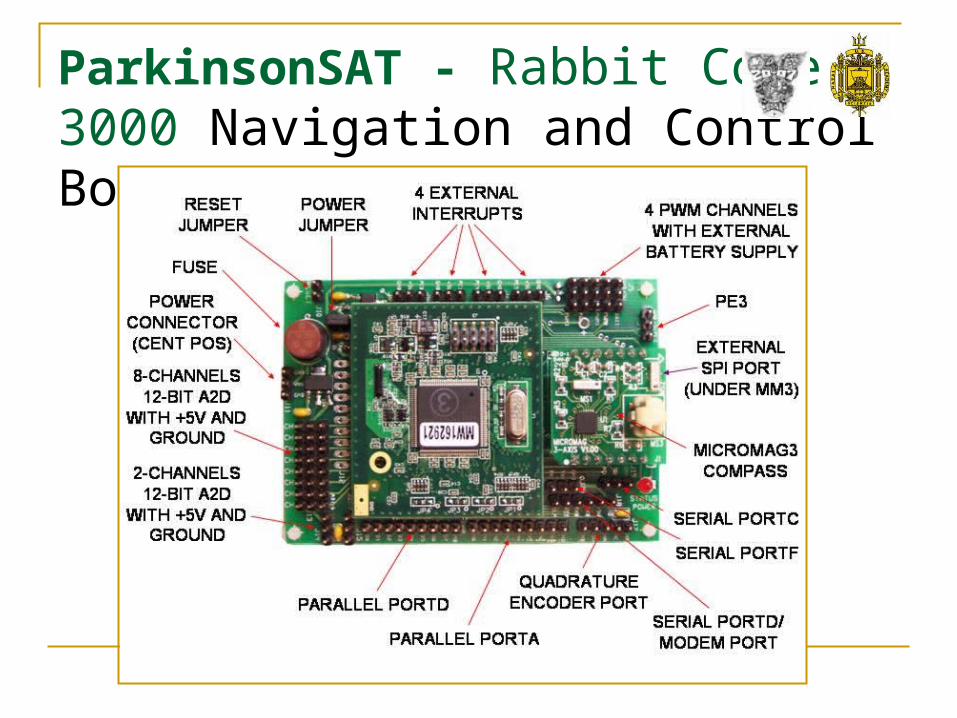
ParkinsonSAT - Rabbit Core 3000 Navigation and Control Board

ParkinsonSAT - USNA

ParkinsonSAT - USNA
29.4Mhz Processor Programmed with Dynamic C 10 Channels 5V A2D 4 PWM Channels 5V-9V input up to 400mA 4 External Interrupts

ParkinsonSAT - USNA
CPU will also be used for housekeeping and telemetry and control Log experiment data Parse telemetry into packets Command systems on or off Monitor health of satellite systems and experiments
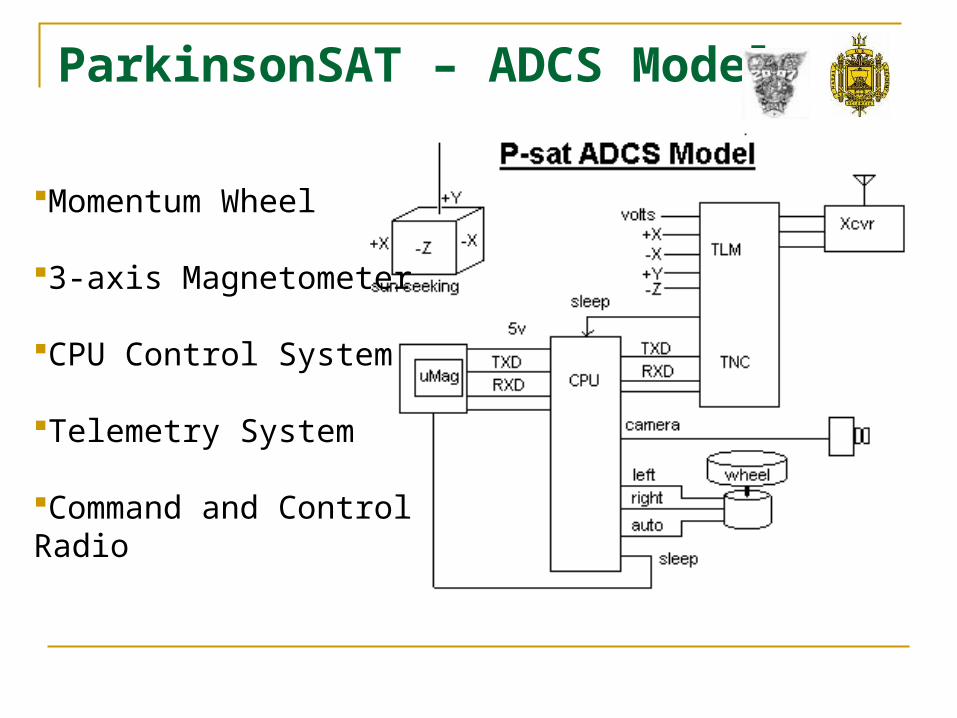
ParkinsonSAT – ADCS Model
Momentum Wheel
3-axis Magnetometer
CPU Control System
Telemetry System
Command and Control Radio

ParkinsonSAT–RickSAT ADCS
Requirements:1. Sun Exposure2. Minimum Torque, (long string needed)3. Minimum Disturbances4. Out of Reach5. Easy Access

ParkinsonSAT-Apparatus Safety Test
P-SAT Weight- 5.9kg
String=rated at a 13.5 kgDouble String= factor of 4 safety
A-Frame Support- tested to 38 kg= factor of 6 safety

ParkinsonSAT –ADCS String test Simulation Quality
Typical Disturbance Torques Gravity Gradient-2* Solar Radiation- 6* Aerodynamic- 3* Magnetic- 1* for a 2 Amp-m
magnetic moment
Measuring String Torsion Constant k=1.1* kg-m /sec T=k* Disturbance angle ( ) where string
Torque is less than 1* is 90 deg String impact is minimal for Sun
tracking within +/-90 degrees.
Rickover
610
610
610
610
410
410
902
22

ParkinsonSAT - SPID
Small
Particle
Impact
Detector

ParkinsonSAT - SPID
Deployment Sequence

PSAT- S.C.I.E.N.C.E ISS
Space Communications International Educational Network Classroom Experience

PSAT- S.C.I.E.N.C.E ISS