system level design review - rochester institute of …edge.rit.edu/edge/p16121/public/systems level...
TRANSCRIPT

System Level Design Review

Project Review
Needs and Requirements Review
Functional Decomposition
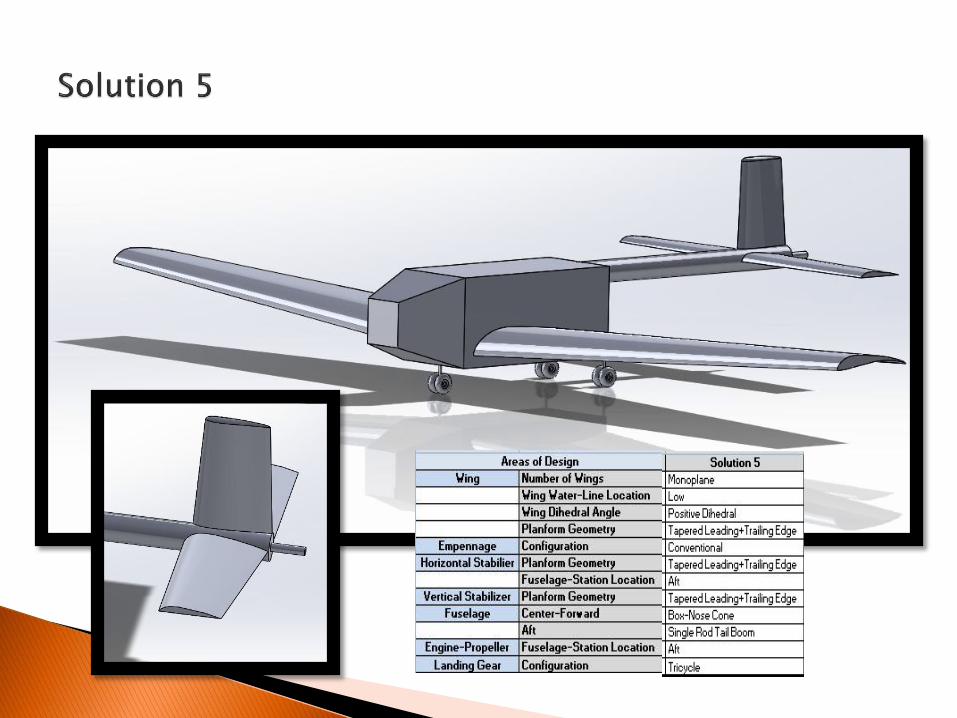
Concept Development
Concept Selection
Initial Risk Identification
Feasibility Analysis
Engineering Analysis
Risk Review
Further Work Done
Questions

RIT Aero Design Club has been absent from the SAE Aero competition (Regular Class) since 2008
◦ Prior to 2008, RIT had been inconsistent in participating in the competition annually
Lacking…
◦ Experienced veterans to lead/guide the club
◦ Aeronautical engineering experience/knowledge
◦ Full commitment as students are on co-op for parts of the year
◦ Funding

Deliverables◦ A functional finished aircraft designed and built to SAE Aero standards
◦ Comprehensive documentation of design, build, and testing methods and processes
Jumpstart the Aero Club◦ Build competence through sharing experience from the present Senior Design project
◦ Desired State: Aero Design club is able to compete in the SAE Aero Competition annually and be competitive

SAE Aero Organization – Primary Customer
RIT Aero Design Club
MSD I Team Members
Dr. Kolodziej – Faculty Guide
RIT Aerospace Engineering Faculty
Potential Sponsors
Rochester Institute of Technology


The competition rules are fulfilling the role of our customer.
The 2015 rules were used for determining the customer requirements.
The 2016 competition rules were published recently. The differences are of minimal consequence for this class of competition. Revision of customer requirements, engineering requirements and the house of quality is a work in progress.

Importance Key: 3=must have, 2=nice to have, 1=preference only

Importance Key:
9 = Critical3 = Moderate1 = Insignificant
*Note: All engineering requirements derived from SAE Aero rules are deemed critical as failing to meet the target values will result in penalization or disqualification.




Take-off within required distance
Obtain required initial velocity
Obtain required lift
Utilize control surfaces
Thrust engine (max)
Deploy flaps
Rotate elevator (-)
Utilize 6 cell (22.2 volt) Lithium Polymer (Li-Poly/Li-Po) battery
Decrease Velocity
Obtain required lift
Eliminate engine thrust
Pitch aircraft up (drag increase)
Rotate elevator (-)
Utilize control surfaces
Deploy flaps
Trim aircraft (longitudinal, directional, lateral)
Utilize control surfaces
Rotate elevator as required
Rotate rudder as required
Rotate ailerons as required
Land within required distance
The Aircraft: Fly a required flight path while carrying a payload.

Maneuver in flight
Maintain cruise velocity
Obtain required lift
Thrust engine as required
Trim aircraft
Utilize control surfaces
Rotate elevator as required
Rotate rudder as required
Deflect ailerons as required
Utilize 6 cell (22.2 volt) Lithium Polymer (Li-Poly/Li-Po) battery
Control Aircraft
Turn directionally
Pitch aircraft
Roll Aircraft
Rotate elevator as required
Rotate rudder as required
Deflect ailerons as required
Carry payload
Utilize payload bay
Attach to aircraft in a manner that it is easily loaded and removed
The Aircraft: Fly a required flight path while carrying a payload.













Datum:
University of
Manitoba
2014 Aircraft

There are a few risk areas that we identified for close consideration:
◦ Cost. Can we procure the necessary materials within our $500 budget? What can we do to lower our costs?
◦ Take off capability. Can the aircraft generate enough thrust and lift to take off in the required distance?
◦ Power requirement. Can we provide an adequate amount of energy with available batteries? What size does the battery have to be?

Cost Analysis
Material Properties
Power needs
Thrust Analysis
Flight Conditions
Preliminary Wing Iteration
Take-off and Landing Distance




Thrust is dependent upon the diameter of the propeller, the inlet velocity, and the exit velocity. The exit velocity is impossible to calculate analytically, but we do have an empirical equation developed by a RC enthusiast.
For static thrust:
For dynamic Thrust:
Simplified:

The diameter has the biggest impact on thrust developed. This is confirmed by standard rule of thumb among hobbyists as well as by data published by APC
The APC data is generated by their own CFD analysis and is available for all their propellers
We will mostly be using our empirical equation to get estimates for static thrust, as the dynamic thrust element is considered suspect
We will also use APC data, as well as a simplified model that was found:
These 3 different thrust estimates will give us a good ballpark estimate of what to expect from a particular prop and RPM
𝐹 = 𝑃 ∗ 𝐷3 ∗ 𝑅𝑃𝑀2 ∗ 10−10

The equations and data also require an RPM input. This can be estimated if the Kv rating of the motor is known
◦ Kv Rating * Voltage = Ideal RPM
These have been put together into an excel calculator
Depending on our motor, propeller, and current draw, we should be able to get between 10 and 15 pounds of thrust
Testing is needed to refine this




XFLR5 simulations suggest lower performance than expected. It is known that physical wings generate less lift and more drag than airfoils suggest, but the values are unexpectedly low.
Simulation efforts are proceeding using ANSYS. If this proves to be a reliable method, we will proceed using the simulation process described on the next slide.
Any simulation effort requires some comparison to measured data in order to establish that the simulation is working. We will compare to measured airfoil data by recreating the UIUC windtunnel tests.
Currently we have encountered difficulty meshing the S1223, S1223RTL and S1210 airfoils

Desired Performance
Quality or Feature
Simulation
Not Possible
Possible
Refine if neededAnalyze
Consequences of Design
Reconsider desire and solution
Populate new requirements

After our analysis we have reached the following conclusions:
◦ Providing adequate electrical energy should not be an issue if a properly sized battery is purchased.
◦ The takeoff ability of the aircraft will need to be worked on with further wing development and analysis, and the testing of propulsion systems to determine hard thrust numbers. Thrust will need to be maximized.
◦ Cost will be a significant issue if not addressed. However, we can pursue strategies to reduce cost, including using any available loaned or donated materials. Updated risk intensity shown below.

Thanks to Professor Wellin we have been donated these items:
◦ Hacker A60-5S V2 28 Pole Brushless Motor x1
◦ Phoenix edge lite 130 Electronic Speed Controller, x1
◦ insulated copper wire (7 gage) ~3feet
◦ Mejzlik modellbau 27x12TH Propeller, hollow carbon fibre, x1
◦ APC C-2 21x12W Propeller, plastic x1
◦ APC C-2 22x10E Propeller, plastic x1
◦ APC C-2 24x12 Propeller, plastic x1

Developing test plan for the evaluation of:◦ Propulsion System
◦ Structural strength of wing rib
◦ Material Property testing of Balsa wood and numerous 3D printed plastics
◦ Looking into wind tunnel availability
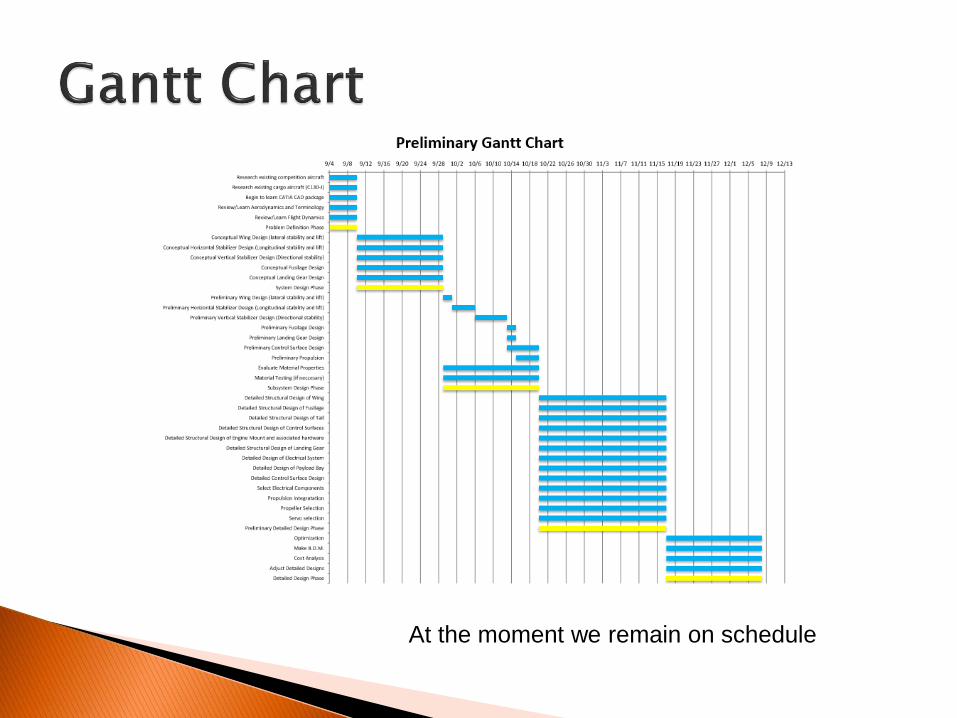
At the moment we remain on schedule

Comments
Concerns
Complaints

Simulations of basic wings is successful
Simulation of wings of interest is encountering issues with meshing

Problematic Region

Continue to address meshing problems
Resolve simulation and compare to known values from windtunnel testing
If that is successful we will be able to fill in gaps in published data using the simulation and verify later.
Bounds of error will be assumed to be similar to error between simulation and comparison data

Selig, M.S., Lyon, C.A., Giguère, P., Ninham, C.N., and Guglielmo, J.J.,Summary of Low-
Speed Airfoil Data, Vol. 2, SoarTech Publications, Virginia Beach, VA, 1996

Selig, M.S., Lyon, C.A., Giguère, P., Ninham, C.N., and Guglielmo, J.J.,Summary of Low-
Speed Airfoil Data, Vol. 2, SoarTech Publications, Virginia Beach, VA, 1996