symmetry-enhancing for a thin film equation tanya l.m…
TRANSCRIPT

SYMMETRY-ENHANCING FOR A THIN FILM EQUATION
TANYA L.M. WALKER
A thesis submitted in fulfilment
of the requirements for the degree of
Doctor of Philosophy - Science
University of Western Sydney
2008

i
ABSTRACT
This thesis is concerned with the construction of new one-parameter symmetry groups
and similarity solutions for a generalisation of the one-dimensional thin film equation by
the method of symmetry-enhancing constraints involving judicious equation-splitting.
Firstly by Lie classical analysis we obtain symmetry groups and similarity solutions of
this thin film equation. Via the Bluman-Cole non-classical procedure, we then construct
non-classical symmetry groups of this thin film equation and compare them to the
classical symmetry groups we derive for this equation.
Next we apply the method of symmetry-enhancing constraints to this thin film equation,
obtaining new Lie symmetry groups for this equation. We construct similarity solutions
for this thin film equation in association with these new groups. Subsequently we
retrieve further new symmetry groups for this thin film equation by an approach
combining the method of symmetry-enhancing constraints and the Bluman-Cole non-
classical procedure. We derive similarity solutions for this thin film equation in
connection with these new groups.
Then we incorporate nontrivial functions into a partition (of this thin film equation)
which has previously led to new Lie symmetry groups. The resulting system admits new
Lie symmetry groups. We recover similarity solutions for this system and hence for the
thin film equation in question.
Finally we attempt to derive potential symmetries for this thin film equation but our
investigations reveal that none occur for this equation.

ii
PREFACE
In this thesis, the symmetry groups and similarity solutions obtained for the thin film
equation and the systems of equations under consideration form an original contribution.
Where the work of other authors has been used, this has always been specifically
acknowledged in the relevant sections of the text.
Tanya Walker
31st March 2008
iii
ACKNOWLEDGEMENTS
I would like to express my indebtedness to my supervisor Dr. Alec Lee whose
encouragement, enthusiasm, intellectual stimulation and unlimited reserves of patience
have guided my researches since the commencement of this degree.
I wish to thank Professor Broadbridge for discussions leading to the final form of the
generalised thin film equation (1.1) studied in this thesis.
Furthermore I would like to express my deep appreciation of my beloved husband David
for his constant love, tenderness, understanding and confidence in me throughout my
candidature.
Finally I would like to thank my closest friend Karen for the understanding and support
she has always shown me, especially in the undertaking of these studies.
All these factors have combined to make this thesis a reality.

iv
This thesis is dedicated with deepest love to my husband David.
“… O how vast the shores of learning,
There are still uncharted seas,
And they call to bold adventure,
Those who turn from sloth and ease…”
Excerpt from “A Student’s Prayer”
Author unknown

v
TABLE OF CONTENTS
Page
CHAPTER 1: INTRODUCTION 1
CHAPTER 2: LIE CLASSICAL SYMMETRIES FOR THE
THIN FILM EQUATION 10
2.1 Introduction 10
2.2 The Classical Procedure 11
2.3 Tables Of Results 48
2.4 Concluding Remarks 55
CHAPTER 3: NON-CLASSICAL SYMMETRIES FOR THE
THIN FILM EQUATION 56
3.1 Introduction 56
3.2 The Non-Classical Procedure 57
3.3 Tables Of Results 73
3.4 Concluding Remarks 75
CHAPTER 4: CLASSICAL SYMMETRY-ENHANCING
CONSTRAINTS FOR THE THIN FILM EQUATION 76
4.1 Introduction 76
4.2 The Method Of Classical Symmetry-
Enhancing Constraints 77
4.3 Tables Of Results 97
4.4 Concluding Remarks 100
CHAPTER 5: NON-CLASSICAL SYMMETRY-ENHANCING
CONSTRAINTS FOR THE THIN FILM EQUATION 101
5.1 Introduction 101
5.2 The Method Of Non-Classical Symmetry-
Enhancing Constraints 102
5.3 Tables Of Results 154
5.4 Concluding Remarks 161

vi
CHAPTER 6: CLASSICAL SYMMETRY-ENHANCING
CONSTRAINTS FOR THE THIN FILM EQUATION
INVOLVING ARBITRARY FUNCTIONS 163
6.1 Introduction 163
6.2 Classical Symmetry-Enhancing Constraints 164
6.3 Tables Of Results 193
6.4 Concluding Remarks 197
CHAPTER 7: LOCATING POTENTIAL SYMMETRIES FOR THE
THIN FILM EQUATION 198
7.1 Introduction 198
7.2 The Method Of Obtaining Potential Symmetries 199
7.3 Concluding Remarks 200
CHAPTER 8: CONCLUSION 201
BIBLIOGRAPHY 204

1
CHAPTER 1
INTRODUCTION
We construct new one-parameter symmetry groups and corresponding similarity
solutions for a generalised thin film equation via the method of symmetry-enhancing
constraints introduced and developed by Goard and Broadbridge [29]. This technique
involves systematic equation-splitting and is restricted to classical symmetries. In
conjunction with this method of symmetry-enhancing constraints, Saccomandi
considered special classes of non-classical symmetries [47]. By similarly augmenting
this method of symmetry-enhancing constraints with the non-classical symmetry method
of Bluman and Cole [16], we retrieve symmetry groups for the enlarged system resulting
from the partitioning of the generalised thin film equation in question.
By means of the symmetry groups obtained for this thin film equation via the method of
symmetry-enhancing constraints, we identify similarity solutions of the latter equation.
Computer techniques involving the Mathematica and Maple programs are instrumental
in the process of deriving these groups and solutions [46, 54].
Applying the method of symmetry-enhancing constraints to solve this generalised thin
film equation does not consistently prove successful in deriving solutions, as is clear
from Chapter 5 of this thesis. However, this method of solving differential equations is
successfully applicable to nonlinear differential equations such as cylindrical boundary-
layer equations, generating new similarity solutions [29].
Other treatments of recovering solutions include the approach developed by Burde to
derive explicit similarity solutions of partial differential equations (PDEs) [20]. His
approach is an extension of the Bluman-Cole non-classical group method [15]. Burde’s
method involves directly substituting a similarity form of the solution into the given
PDE and was developed via a variation of the Clarkson-Kruskal technique [22]. Instead
of requiring this given PDE be reduced to an ordinary differential equation (ODE) as in
the Clarkson-Kruskal technique [22], a weaker condition is imposed, namely that this
PDE be reduced to an overdetermined system of ODEs solvable in closed form. The
viability of Burde’s approach was justified as it enabled Burde to recover new, exact,
explicit, physically significant similarity solutions for the two-dimensional steady-state

2
boundary layer problems. Although the solutions thus obtained extend beyond the
confines of those retrievable via classical Lie analysis and the Bluman-Cole non-
classical group method [15], they proved to be merely a special case of solutions derived
within the framework of the method of symmetry-enhancing constraints [29].
The equation under consideration in this thesis is a generalisation of the one-dimensional
thin film equation and is given by
[ ] ;0)()()( =++−∂
∂txxxxx hhhjhhghhf
x (1.1)
where h denotes the height of a thin viscous droplet (or film) as a function of time t and
the (one-dimensional) spatial coordinate x parallel to the solid surface. This thesis
assumes the y - independence of ,h namely that “the film flows without developing any
structure in the transverse direction” [44].
The term )(hf arises from surface tension (which ‘tends to flatten the free surface’ [44])
between two liquids or between liquid and air and incorporates any slippage at the
liquid/solid interface. This term represents surface tension effects and the viscosity of the
liquid [45].
The term )(hg results from film destabilisation due to thermocapillarity or a density
mismatch between two liquids or physical effects such as evaporation, condensation, the
normal component of gravity to a solid surface and intermolecular forces [2]. This term
can indicate “additional forces such as gravity, van der Waals interactions or
thermocapillary effects” [45]. If ,0)( ≥hg occurring with repulsive van der Waals
interactions, a long wave instability appears. If ,0)( ≤hg the thin film equation (1.1)
lacks a long wave instability.
The convective term )(hj includes any directed driving forces (such as gravity or
Marangoni stress) corresponding to a dimensionless flux function [14]. In the case of
dominant Marangoni stress, the Burgers flux 2)( hhj = occurs while the compressive
3)( hhj = features in the case of gravitational stress [14]. The Marangoni effect
corresponds to “tangential stresses at the gas-liquid interface due to surface tension
gradients” while Marangoni flow refers to “film flow induced by surface tension
gradients” [2].
3
The thin film equation (1.1) is a nonlinear degenerate fourth order diffusion equation
describing the flow of thin liquid films of height (or dimensionless thickness) h on an
inclined flat surface under the action of forces of gravity, viscosity and surface tension at
the air/liquid interface [14, 34]. This equation features 0>h in a one-dimensional
geometry so that h depends on one space variable x and time t [18].
The most common derivation of the thin film equation is as a lubrication approximation
(or limit) of the Navier-Stokes equations for incompressible fluids [2, 33, 44]. Thin films
are effectively described by lubrication approximation in which the equation of motion is
given by the thin film equation (1.1) with nhhf =)( and 0)()( == hjhg where 0>h is
a requirement [18].
Grun and Rumpf presented numerical experiments indicating the occurrence of a waiting
time phenomenon for fourth order degenerate parabolic equations [33]. Grun proved
such an occurrence in space dimensions 4<N for the thin film equation subjected to
Navier’s slip condition or even weaker slip conditions [32]. Via formal asymptotic
expansions and homogenisation theory, Bayada and Chambat examined the asymptotic
behaviour of the Stokes equation (where the roughness spacing and gap height approach
zero) in order to focus on the thin-film hydrodynamic lubrication of rough surfaces [1].
We adopt the restriction 0)( ≠hf in this thesis since the thin film equation (1.1)
generalises the fourth order nonlinear diffusion equation, a special case of equation (1.1)
with .0)()( == hjhg
The case of the thin film equation (1.1) with nhhf =)( and 0)()( == hjhg occurs in
[7, 34, 37, 38, 39, 43, 53] where 0≥h denotes “the thickness of a (surface tension
driven) fluid film” or droplet height [26, 43] and 0>n is a parameter [26, 34, 37, 38].
Hastings and Peletier regarded 0>n as a constant dependent on the type of flow
considered [34].
The above case of equation (1.1) with the critical value 3=n features in [6, 38, 43, 53]
and is pronounced “most common in physical situations” [38] while 4−=n is noted as a
critical exponent for the large time behaviour of solutions.

4
Bernis, Peletier and Williams considered the critical value 2
3=n at which the nature of
the solution near the interface changes [8]. Hulshof studied similarity solutions of the
thin film equation (1.1) with ,)( nhhf = 0)()( == hjhg and ,0>n recovering one
such explicit solution via Maple 5 release 2; [37]. Bernis, Hulshof and Quiros studied the
limit of nonnegative, self-similar source-type solutions of this case of the thin film
equation (1.1) as ,0+→n consequently obtaining a unique limiting function ,h a
solution of an obstacle-type free boundary problem with constraint ;0≥h [7].
The thin film equation (1.1) arises in fluid dynamics (hydrodynamics) and material
sciences (cf. the Cahn-Hilliard equation) [1, 31, 32]. The case of equation (1.1) with
nhhf =)( and 0)()( == hjhg (where 0>h is a requirement) occurs in certain fluid
dynamics problems in which inertia is negligible and the dynamics is governed by the
presence of viscosity and capillarity forces [18].
Upon assuming “the lubrication approximation with the no-slip condition for the fluid at
the solid surface and the fact that the pressure is entirely due to surface tension”, Beretta
and Bertsch derived the above case of thin film equation (1.1) with ;3=n [3]. This case
has great physical significance in lubrication theory in terms of governing the dynamics
of the spreading of a droplet over a solid surface under effects of viscosity and
capillarity. This case is depicted as the height ),( txh of a thin film of slowly flowing
viscous fluid over a horizontal substrate when surface tension is the dominating driving
force [3, 6, 12, 18, 38, 39, 43]. This case corresponding to no-slip boundary conditions
results in infinite viscous dissipation, generating variations on the same problem by
changing boundary conditions at the interface solid fluid [12, 18].
The case of the thin film equation (1.1) with 2)( hhf = and 0)()( == hjhg corresponds
to “slip dominated spreading with a Navier slip law” [43] and occurs in [4] and [18].
According to Laugesen and Pugh, the case of the thin film equation (1.1) with 0)( =hj
is used to model the dynamics of a thin film of viscous liquid where the air/liquid
interface is at height ),,( tyxhz = and the liquid/solid interface is at ;0=z [45]. These
authors also state that equation (1.1) with 0)( =hj applies if the liquid film is uniform in

5
the y direction [45]. An application of equation (1.1) with 0)( =hj lies in its ability to
model the aggregation of aphids on a leaf where h represents population density [45].
The special case of the thin film equation (1.1) with hhf =)( and 0)()( == hjhg is
used to describe the evolution of the interface of a spreading droplet, modelling the
surface tension dominated motion of thin viscous films and spreading droplets,
according to Carrillo and Toscani [21]. This case describes the dynamics of the process
in the gravity-driven Hele-Shaw cell [6, 12, 18, 23, 25, 30, 38, 43, 45]. In this process,
liquid in a fluid droplet is sucked so as to produce a long thin bridge of thickness h
between two masses of fluids, the geometry of which problem being able to be
approximated as one-dimensional under appropriate conditions. This case emerges when
considering a drop on a porous surface [18].
Another of the varied applications of the thin film equation (1.1) is the modelling of
driven contact line experiments involving only one dominant driving force
(corresponding to a convex flux function )(hj ) [14]. In addition, equation (1.1) models
thin film slow viscous flows (viscosity driven flows) such as painting layers [37] and the
drying of a paint film in a specific parameter regime [52]. Equation (1.1) also plays a key
role in plasticity modelling where h represents the density of dislocations. This equation
occurs in the Cahn-Hilliard model of phase separation for binary mixtures where h
denotes the concentration of one component.
The case of the thin film equation (1.1) with ,)( nhhf = 0)()( == hjhg and )3,0(∈n
emerges as a lubrication theory model for the flow of thin viscous films (and spreading
droplets) driven by strong surface tension over a horizontal substrate with ),( txh
denoting the height of the free-surface of the film [7, 9, 26, 31, 32, 33]. The range 0<n
corresponds to fast diffusion, ),0( ∞∈n denotes slow diffusion with finite speed of
propagation and )0,1(−∈n represents fast diffusion with infinite speed of propagation
while the range 1−≤n has not been considered to such an extent [7].
From a modelling perspective where 0≥h is a requirement and the physically relevant
dimensions are either 1 or 2, some authors studied the full range ];3,0(∈n [5, 10, 12].
Bernis et al. constructed self-similar source-type solutions of obstacle-type free boundary
problems associated with this case of thin film equation (1.1) for the range ;4−≤n [7].
6
Bernis et al. studied the case of one spatial dimension [8]. For the case of two spatial
dimensions and with ,3=n source-type solutions with a jump discontinuity are studied
in [19, 49, 50], forming a special case of the source solution ),( txhk for all 0>n and
for all ),,0( ∞∈k proven to exist and be discontinuous at the free boundary [26]. If one
assumes no slip on the substrate, the case 3=n arises.
Bernoff and Witelski studied the special case of the thin film equation (1.1) with
,)( nhhf = 0)()( == hjhg and ),3,0(∈n using linear stability analysis to demonstrate
the linear stability of the resulting source-type similarity solutions [9]. They derived an
exact polynomial similarity solution for this case with .1=n Polynomial similarity
solutions of the thin film equation (1.1) also occur in chapter 5 of this thesis.
Khayat and Kim observed that in the case of transient two-dimensional thin film flow,
the intensity of the initial gradient in velocity (and film thickness) diminishes with time
[41]. Kim and Khayat examined the two-dimensional non-Newtonian flow of a thin fluid
film emerging from a channel and moving on a solid and stationary substrate [42]. They
stated the flow to be induced by the pressure gradient within the channel where fully
developed Poiseuille conditions are assumed to prevail. They further mentioned that
while the steady-state film thickness for viscous flow tends to increase with distance
from the channel exit, the thickness of a highly elastic film diminishes rapidly. They
observed the substrate geometry to influence mean flow only in the presence of gravity
[42].
Bernis and Ferreira sought radial, self-similar source solutions for the special case of the
thin film equation (1.1) with nhhf =)( and ;0)()( == hjhg [6]. Boatto, Kadanoff and
Olla remarked that the difficulty of studying this case of equation (1.1) lies in its singular
behaviour for 0=h and that an approach to the problem has been to study similarity
solutions for this case of equation (1.1) [18]. Boatto et al. focused on travelling-wave
solutions [18]. We recover such solutions to this and other cases of the thin film equation
(1.1) and include these solutions in this thesis.
Kondic applied the similarity method to explore how the film thinning process evolves
in time [44]. Via linear stability analysis and the similarity method, Kondic studied the
equation comparable to the thin film equation (1.1) with ,)()( 3hhghf == 23)( hhj =
and the size of the normal component of gravity equalling one [44]. Snapshots of fluid

7
profiles for this equation revealed that after initial transients, the flow develops a
travelling wave profile [44].
Via analysis methods (involving a Lyapunov function), Bertozzi and Shearer studied an
equation comparable to the thin film equation (1.1) with ,)()( 3hhghf == 23)( hhj =
and the size of the dimensionless parameter governing gravitational, viscous and surface
tension forces as well as the slope of the surface equalling 1; [14]. Experimental and
numerical studies of driven contact lines disclosed that travelling wave solutions of this
equation play a key role in the motion of the film [11, 13, 40, 51]. Travelling wave
solutions also arise in chapters 2 – 5 of this thesis.
Hulshof and Shishkov [39] examined compactly supported solutions of the case of the
thin film equation (1.1) with ,)( nhhf = 0)()( == hjhg and [ )3,2∈n on
( ) ( ]{ }TtRRxtxQT ,0,,:),( ∈−∈= with nonnegative initial data and lateral boundary
conditions respectively given by
)()0,( 0 xuxu = with ,00 ≥u ( ) ( ) .0,, =±=± tRutRu xxxx (1.2)
These authors regarded R as a finite positive number. It is also potentially considered as
∞=R for compactly supported solutions (the Cauchy problem). For the case of zero
contact angle boundary conditions on a finite domain, van den Berg et al. investigated
self-similar solutions of the above case of the thin film equation (1.1) where n is a real
parameter [53].
The outline of the thesis is as follows.
In chapter 2 we obtain the Lie classical symmetry groups of the thin film equation (1.1)
and derive its similarity solutions in association with each of these groups. We use the
one-parameter )(ε Lie group of general infinitesimal transformations in ,x t and ,h
namely
( ) ( )( ) ( )( ) ( ).,,
,,,
,,,
2
1
2
1
2
1
εεζ
εεη
εεξ
Ohtxhh
Ohtxtt
Ohtxxx
++=
++=
++=
(1.3)
In conjunction with Lie classical analysis discussed in [36], group transformations (1.3)
enable the recovery of the one-parameter Lie classical symmetry groups for the thin film
equation (1.1).

8
In chapter 3 we construct non-classical symmetry groups for the thin film equation (1.1)
under the action of group transformations (1.3), using the non-classical symmetry
method of Bluman and Cole [16]. We compare these symmetry groups with those
obtained in chapter 2 and derive for equation (1.1) any similarity solutions not
retrievable by Lie classical analysis. Full details of these solutions occur in chapter 3.
In chapter 4 we apply the method of symmetry-enhancing constraints [29] to the thin
film equation (1.1) in association with group transformations (1.3) with a view to
obtaining new symmetry groups. In line with this method, we studied various partitions
of the thin film equation (1.1).
Two of these partitions lead to new Lie symmetry groups and generate the systems
( ) ,0)()(2
=′−+ xxt hhghhjh [ ] ;0)()( =−∂
∂xxxxx hhghhf
x (1.4)
and
,0)()( =+− txxxxxx hhhghhf ( ) .0)()()(2
=+′−′xxxxxx hhjhhghhhf (1.5)
We construct similarity solutions for systems (1.4) and (1.5) and hence for the thin film
equation (1.1) in relation to each of these new groups. A full account of these solutions is
given in chapter 4.
In chapter 5 we derive symmetry groups for the thin film equation (1.1) in association
with group transformations (1.3) by a treatment combining the method of symmetry-
enhancing constraints [29] with the non-classical symmetry method of Bluman and Cole
[16]. Saccomandi considered the combination of these two techniques [47]. Investigating
systems (1.4) and (1.5) from the perspective of this combined approach generates new
symmetry groups for these systems. We retrieve the similarity solutions for systems (1.4)
and (1.5) and thus for the thin film equation (1.1) in connection with these groups.
In chapter 6 we augment system (1.4) with the arbitrary nontrivial functions )(xa and
),(tb obtaining the equations
( ) ,0)()()()(2
≠=′−+ tbxahhghhjh xxt [ ] .0)()()()( ≠−=−∂
∂tbxahhghhf
xxxxxx (1.6)
System (1.6) admits new Lie symmetry groups in association with transformations (1.3).
We derive similarity solutions for system (1.6) and hence for the thin film equation (1.1)
in relation to these groups. We give a full account of these groups and solutions in
chapter 6.
9
In chapter 7 we seek potential symmetries for the thin film equation (1.1) by the method
introduced and developed by Bluman, Reid and Kumei [17].
At the end of each chapter, we tabulate all results obtained in the chapter concerned. This
thesis has been written largely in accordance with the guidelines in Higham [35],
Bluman and Kumei [55], Ibragimov [56], Olver [57] and Ovsiannikov [58].

10
CHAPTER 2
LIE CLASSICAL SYMMETRIES FOR THE
THIN FILM EQUATION
2.1 INTRODUCTION
By the Lie classical procedure, we determine the Lie classical symmetry groups for the
thin film equation
[ ] [ ] ;0)()()( =++∂
∂−
∂
∂txxxxx hhhjhhg
xhhf
x (2.1)
where .0)( ≠hf The restriction 0)( ≠hf applies since the thin film equation (2.1)
generalises the fourth order nonlinear diffusion equation, a special case of equation (2.1)
with .0)()( == hjhg This case of the thin film equation (2.1) occurs in Bernoff and
Witelski [9] and King and Bowen [43]. The term )(hf in the thin film equation (2.1)
represents surface tension effects (Laugesen and Pugh [45]).
We consider the one-parameter )(ε Lie group of general infinitesimal transformations in
,x t and ,h namely
( ) ( )( ) ( )( ) ( );,,
,,,
,,,
2
1
2
1
2
1
εεζ
εεη
εεξ
Ohtxhh
Ohtxtt
Ohtxxx
++=
++=
++=
(2.2)
preserving the thin film equation (2.1).
Hence if ),,( txh φ= then from ),,( 111 txh φ= evaluating the expansion of ε∂
∂ 1h at 0=ε
gives the invariant surface condition
).,,(),,(),,( htxt
hhtx
x
hhtx ζηξ =
∂
∂+
∂
∂ (2.3)
Solutions of the invariant surface condition (2.3) are functional forms of similarity
solutions for the thin film equation (2.1).
The next section contains a brief outline of the Lie classical method, also described in.
Hill [36].

11
2.2 THE CLASSICAL PROCEDURE
The classical method requires equating to zero the infinitesimal version of the thin film
equation (2.1) without using the invariant surface condition (2.3). In obtaining the
infinitesimal version of the thin film equation (2.1), we eliminate the highest order
derivative 4
4
x
h
∂
∂ in equation (2.1) by expressing it with respect to all the remaining terms
of equation (2.1). Prolongation of the action of group transformations (2.2) on the thin
film equation (2.1) yields the invariance requirement, obtained by equating to zero the
coefficient of ε in the infinitesimal version of equation (2.1). Terms of order 2ε are
neglected in these calculations since they involve relations between the group generators
,ξ η and ζ already considered in the coefficient of ,ε the left-hand side of the
invariance requirement.
The thin film equation (2.1) remains invariant under group transformations (2.2)
provided the group generators ),,,( htxξ ),,( htxη and ),,( htxζ satisfy the determining
equations
,0=hξ ,0== xh ηη ,0=hhζ ,0)(
)(=�
�
���
� ′ζ
hf
hf
dh
d ( ) ,0)( =−′
xxxhhf ξζ
,0)()()( =+−+ xxxxxxxt hfhghj ζζζζ ,0)(
)()(4 =
′−′−
hf
hftx ζηξ
[ ] xxxxxxtx hfhghgdh
d
hf
hj
dh
dhfhj ζξζζξξ )()()(2
)(
)()()(3 ′++−�
�
���
�+−
( ) ,04)( =−+ xxxxxxxhhf ξζ (2.4)
,064)(
)(=−+
′xxxhx
hf
hfξζζ ,0
)(
)(
)(
)(246 =�
�
���
�−−−
hf
hg
dh
d
hf
hgxxxxxxh ζξξζ
( ) ( ) .0)(
)(2
)(
)(3
)(
)(=�
�
���
� ′−+
′−−
′
hf
hg
dh
d
hf
hg
hf
hfxhxxxxxh ζξζξζ
Equating to zero the coefficients of all derivatives of h and the sum of all remaining
terms not involving derivatives of h within the invariance requirement for the thin film
equation (2.1) produces system (2.4). All subscripts in system (2.4) denote partial
differentiation with ,x t and h as independent variables. Throughout this chapter,
primes represent differentiation with respect to the argument indicated.

12
System (2.4) enables the recovery of all Lie classical symmetries and corresponding
conditions on ,0)( ≠hf )(hg and )(hj for the thin film equation (2.1) under group
transformations (2.2).
We now partially solve the determining equations (2.4) to clarify derivations of sets of
conditions on ,0)( ≠hf )(hg and )(hj associated with each Lie classical group we
obtain for the thin film equation (2.1). Subsequently we describe the functional forms of
,0)( ≠hf )(hg and )(hj with the corresponding Lie classical group occurring for the
thin film equation (2.1). Eight such groups arise. Lastly we present the similarity
solutions of the thin film equation (2.1) in connection with each of these groups.
From equations (2.4)1 – (2.4)3 , it follows that
),,(),,( txhtx ξξ = ),(),,( thtx ηη = );,(),(),,( txbhtxahtx +=ζ (2.5)
where ),( txa and ),( txb are arbitrary functions of x and .t
By results (2.5)1 and (2.5)3 , equation (2.4)5 gives ( ) ,0)( =−′xxxahf ξ generating cases
(1) ),,(),( txtxa xxx ξ= (2) .0)( =′ hf
We present the derivation of results for case (1) only.
Case (1) ),(),( txtxa xxx ξ=
It follows that
);(),(),( ttxtxa x δξ += (2.6)
where )(tδ is an arbitrary function of .t
Results (2.5)3 and (2.6) cause equation (2.4)9 to give [ ] ,)()(2)( xxx bhfhfhfh ′−=−′ ξ
integrating which with respect to x implies
[ ] );,(),()()(2)( htctxbhfhfhfh x =′+−′ ξ (2.7)
where 0)( ≠hf is an arbitrary function of h while ),( htc is an arbitrary function of t
and .h
By results (2.5)-(2.7), equation (2.4)7 gives ,)(
)()(),()()(2
hf
thfhhtcttx
δφηξ
′+==′− so
),(2
)()(),( tx
tttx α
ηφξ +
′+= );()()()(),( thfhthfhtc δφ ′−= (2.8)
where ),(tα )(tη and )(tφ are arbitrary functions of .t

13
Results (2.8) cause relations (2.5)3 , (2.6) and (2.7) to give
),,(2
)(2)()(),,( txbh
ttthtx +
+′+=
δηφζ
(2.9)
[ ] ).(2
)(2)()()()(2)(),()( hfh
ttttthftxbhf ′
+′+−′+=′
δηφηφ
As equation (2.9)2 gives ,0)( =′xbhf we obtain the subcases
(a) ,0)( =′ hf (b) ).(),( tbtxb =
As case (2) includes subcase (a), we need consider only subcase (b).
Subcase (b) )(),( tbtxb =
Results (2.8) and (2.9) yield
),(2
)()(),( tx
tttx α
ηφξ +
′+= ),(
2
)(2)()(),(),,( tbh
ttththtx +
+′+==
δηφζζ
(2.10)
[ ] );(2
)(2)()()()(2)()()( hfh
ttttthftbhf ′
+′+−′+=′
δηφηφ
where )(tb is an arbitrary function of .t
Substituting result (2.10)2 into equation (2.4)6 gives
),()(2)( 1 ttdt φδη −−=′ ;)( 2dtb = (2.11)
where 1d and 2d are arbitrary constants.
Results (2.10) and (2.11) give
[ ] ),()(),( 1 txtetx αδξ +−= ),()(2)( 1 ttdt φδη −−=′ ,)(),( 21 dhehht +== ζζ
(2.12)
( ) [ ] );()(2)()( 121 hfdtthfdhe +−=′+ δφ
where .2
11
de =
As equation (2.12)4 has the form ),()( tmhk = giving ,0)()( =′=′ tmhk it follows that
,)(2)( 31 ddtt =+− δφ ( ) );()( 321 hfdhfdhe =′+ (2.13)
where 3d is an arbitrary constant.

14
Results (2.12) and (2.13) yield
),(2
)(),( 3 tx
tdtx α
φξ +
−= ),(2)( 3 tdt φη −=′ ,)( 21 dheh +=ζ
(2.14)
( ) ).()( 321 hfdhfdhe =′+
By results (2.14)1 , (2.14)3 and (2.14)4 , equation (2.4)8 gives
( ) ).(2
)()(
2
)(3)( 3
21 txt
hjtd
hjdhe αφφ
′=′
+−
+′+ (2.15)
Setting to zero the coefficient of x in equation (2.15) yields
;)( 4dt =φ (2.16)
where 4d is an arbitrary constant.
In view of result (2.16), equation (2.15) gives
;)( 65 dtdt +=α (2.17)
where 5d and 6d are arbitrary constants.
Redefining the constants, the determining equations (2.4) and the results for this case are
,),( 654 DtDxDtx ++=ξ ,)( 73 DtDt +=η ,)( 21 DhDh +=ζ
( ) ),()( 821 hfDhfDhD =′+ ( ) ),()( 921 hgDhgDhD =′+ (2.18)
( ) ;)()( 51021 DhjDhjDhD =+′+
where iD is an arbitrary constant for all { }10,...,2,1∈i with ,4 348 DDD −=
349 2 DDD −= and .4310 DDD −=
In view of equations (2.18)4 and (2.18)6 , we consider the cases
(1) ,021 =+ DhD ,0108 == DD ,05 =D (2) ,021 =+ DhD ,0810 =≠ DD
(3) ,021 ≠+ DhD ,01012 ==≠ DDD (4) ,021 ≠+ DhD ,01102 =≠ DDD
(5) ,021 ≠+ DhD ,0101 =≠ DD (6) ,021 ≠+ DhD .0101 ≠DD
Rewriting cases (1)-(6) above with 348 4 DDD −= and 4310 DDD −= gives
(a) ,054321 ===== DDDDD (b) ,04 2143 ==≠= DDDD
(c) ,04312 =−=≠ DDDD (d) ,012 =≠ DD ,43 DD ≠
(e) ,0431 =−≠ DDD (f) ,01 ≠D .43 DD ≠

15
For each of the cases (a) – (f), we describe ,0)( ≠hf )(hg and )(hj (obtainable from
the defining equations (2.18)4 – (2.18)6) with their associated Lie classical groups (I) –
(VI). We also present ,0)( ≠hf )(hg and )(hj with their corresponding Lie classical
groups (VII) – (VIII) for case (2). As previously stated, we give the similarity solutions
of the thin film equation (2.1) in conjunction with each of these groups.
GROUP (I)
Subject to the conditions ,0)( ≠hf )(hg and )(hj are arbitrary functions of ,h the thin
film equation (2.1) admits Lie classical group (I), namely
,),,( 6Dhtx =ξ ,),,( 7Dhtx =η ;0),,( =htxζ (2.19)
where 6D and 7D are arbitrary constants.
Similarity Solutions
Group (2.19), the invariant surface condition (2.3) and the thin film equation (2.1) give
,076 =+ tx hDhD [ ] ;0)()()( =++−∂
∂txxxxx hhhjhhghhf
x (2.20)
where 6D and 7D are arbitrary constants while ,0)( ≠hf )(hg and )(hj are arbitrary
functions of .h As 0=xh forces 0=th in equation (2.20)2 , giving =),( txh constant,
we require 0≠xh for system (2.20) to generate nonconstant similarity solutions.
As no similarity solutions are obtainable for the thin film equation (2.1) when
,076 == DD we consider only the cases
(1) ,07 ≠D (2) .076 =≠ DD
Case (1) 07 ≠D
By the method in [24], we solve equation (2.20)1 and substitute its general solution into
equation (2.20)2 . Therefore under transformations (2.2) and with ,0)( ≠hf )(hg and
)(hj arbitrary functions of ,h the similarity solution of the thin film equation (2.1) in
association with group (2.19) and the constraint 07 ≠D is the travelling wave of
velocity ,11D namely
);(),( uytxh = (2.21)

16
satisfying
( ) ( ) ( ) ( )[ ]2)4( )()()()()()()()()( uyuyguyuyguyuyuyfuyuyf ′′−′′−′′′′′+
( )[ ] .0)()( 11 =′−+ uyDuyj (2.22)
In relations (2.21)-(2.22), ,07 ≠D 6D and 7
6
11D
DD = are arbitrary constants while
tDxu 11−= and ( ) ,0)( ≠uyf ( ))(uyg and ( ))(uyj are arbitrary functions of ).(uy We
require 0)( ≠′ uy for solution (2.21) to be nonconstant.
When ,0116 == DD the travelling wave (2.21) reduces to the steady state solution
satisfying the case of the ordinary differential equation (ODE) (2.22) with .011 =D
Case (2) 076 =≠ DD
Since 06 ≠D forces 0=xh in equation (2.20)1 , giving 0=th in equation (2.20)2 ,
system (2.20) yields only the constant solution. Hence under transformations (2.2) and
with ,0)( ≠hf )(hg and )(hj arbitrary functions of ,h the similarity solution of the
thin film equation (2.1) in connection with group (2.19) and the constraints 076 =≠ DD
is the constant solution.
GROUP (II)
Under the conditions 0)( ≠hf is an arbitrary function of ,h 0)( =hg and ,)( 1jhj = the
thin film equation (2.1) yields Lie classical group (II), namely
( ) ,03),,( 614 ≠++= DtjxDhtxξ ,04),,( 74 ≠+= DtDhtxη ;0),,( =htxζ (2.23)
where ,04 ≠D ,6D 7D and 1j are arbitrary constants.
Similarity Solutions
Group (2.23), the invariant surface condition (2.3) and the thin film equation (2.1) imply
( )[ ] ( ) ,043 74614 =++++ tx hDtDhDtjxD [ ] ;0)( 1 =++∂
∂txxxx hhjhhf
x (2.24)
where ,04 ≠D ,6D 7D and 1j are arbitrary constants while 0)( ≠hf is an arbitrary
function of .h Since 0=xh causes 0=th in equation (2.24)2 , giving =),( txh constant,
we require 0≠xh for system (2.24) to admit nonconstant solutions.

17
Via the method in [24] and the integrating factor algorithm in [48], we solve equation
(2.24)1 and substitute its general solution into equation (2.24)2 . Consequently under
transformations (2.2) and the conditions 0)( ≠hf is an arbitrary function of ,h
0)( =hg and ,)( 1jhj = the similarity solution of the thin film equation (2.1) in tandem
with group (2.23) is
);(),( uytxh = (2.25)
satisfying the equations
( ) ( ) ,0)(4
1)()()()()( )4( =′−′′′′′+ uyuuyuyuyfuyuyf ,11Dt >
(2.26)
( ) ( ) ,0)(4
1)()()()()( )4( =′+′′′′′+ uyuuyuyuyfuyuyf .11Dt <
In results (2.25)-(2.26), ,04 ≠D ,6D ,7D ,4 4
7
11D
DD −= ,
4
176
12D
jDDD
−=
4
6
13D
DD =
and 1j are arbitrary constants, ,03 131 ≠++ Dtjx ( ) 0121
4/1
11 ≠+−−=−
DtjxDtu and
( ) 0)( ≠uyf is an arbitrary function of ).(uy We require 0)( ≠′ uy for solution (2.25) to
be nonconstant.
GROUP (III)
Subject to the conditions ,0)( 03
1 ≠= hgefhf
hgeghg 0
1)( = and ,)( 10 jhjhj += the thin
film equation (2.1) admits Lie classical group (III), namely
( ) ,),,( 6002 DtjxgDhtx ++=ξ ,),,( 702 DtgDhtx +=η ;0),,( 2 ≠= Dhtxζ
(2.27)
where ,02 ≠D ,01 ≠f ,6D ,7D ,0g ,1g 0j and 1j are arbitrary constants.
Similarity Solutions
Group (2.27), the invariant surface condition (2.3) and the thin film equation (2.1) give
( )[ ] ( ) ,027026002 ≠=++++ DhDtgDhDtjxgD tx
(2.28)
( ) ( )[ ] ( ) ;03 10
2
010
3
100 =++++−+ txxxx
hg
xxxxxxxx
hghhjhjhgheghhghef
where ,02 ≠D ,01 ≠f ,6D ,7D ,0g ,1g 0j and 1j are arbitrary constants.

18
As 0=xh forces 0=th in equation (2.28)2 , rendering equation (2.28)1 inconsistent, we
require .0≠xh
We consider only the cases
(1) ,00 ≠g (2) .00 =g
Case (1) 00 ≠g
By the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.28)1 and substitute its general solution into equation (2.28)2 . Therefore under
transformations (2.2) and the conditions ,0)( 03
1 ≠= hgefhf
hgeghg 0
1)( = and
,)( 10 jhjhj += the similarity solution of the thin film equation (2.1) in association with
group (2.27) and the constraint 00 ≠g is
;0ln1
)(),( 11
0
≠−+= Dtg
uytxh (2.29)
satisfying the equations
[ ]{ }2
0
)(2
120
)4( )()()()(3)( 0 uyguyeDuyuyguyuyg ′+′′+′′′′+ −
,0)(1
)()(3
1514
1
13
)(3 00 =+′��
���
�+−+ −− uyguyg
eDuyDuf
uyDe ,11Dt >
(2.30)
[ ]{ }2
0
)(2
120
)4( )()()()(3)( 0 uyguyeDuyuyguyuyg ′+′′+′′′′+ −
,0)(1
)()(3
1514
1
13
)(3 00 =−′��
���
�+−− −− uyguyg
eDuyDuf
uyDe .11Dt <
In results (2.29)-(2.30), ,02 ≠D ,01
01
15 ≠=gf
D ,01 ≠f ,00 ≠g ,6D ,7D
,02
7
11gD
DD −= ,
1
112
f
gD −= ,
1
0
13f
jD = ,
1
114
f
jD = ,
0
0
16g
jD = ,
02
6
17gD
DD = ,1g 0j and
1j are arbitrary constants, 0ln 1116
11
1716 ≠−−−
++= DtD
Dt
DtDxu and
( )( ) .0171611 ≠++− DtDxDt Furthermore, 0)( ≠′ uy owing to the requirement .0≠xh
Case (2) 00 =g
We consider the subcases
(i) ,07 ≠D (ii) .07 =D

19
Subcase (i) 007 =≠ gD
Via the method of Lagrange [24], we solve equation (2.28)1 and substitute its general
solution into equation (2.28)2 . Hence under transformations (2.2) and the conditions
,0)( 1 ≠= fhf 1)( ghg = and ,)( 10 jhjhj += the similarity solution of the thin film
equation (2.1) in tandem with group (2.27) and the constraints 007 =≠ gD is
;0)(),( 11 ≠+= tDuytxh (2.31)
satisfying
.0)()()()()( 17161514
)4( =+′+′+′′+ DuyDuyuyDuyDuy (2.32)
In relations (2.31)-(2.32), 0)( ≠′ uy owing to the requirement 0≠xh while ,02 ≠D
,07 ≠D ,07
211 ≠=
D
DD ,0
17
217 ≠=
fD
DD ,01 ≠f ,6D ,
2 7
02
12D
jDD −= ,
7
6
13D
DD −=
,1
114
f
gD −= ,
1
0
15f
jD = ,
17
617
16fD
DjDD
−= ,1g 0j and 1j are arbitrary constants and
.013
2
12 ≠++= tDtDxu
Subcase (ii) 007 == gD
We directly solve equation (2.28)1 and substitute its general solution into equation
(2.28)2 , solving the resulting equation using the integrating factor algorithm [48].
Therefore under transformations (2.2) and the conditions ,0)( 1 ≠= fhf 1)( ghg = and
,)( 10 jhjhj += the similarity solution of the thin film equation (2.1) in tandem with
group (2.27) and the constraints 007 == gD is
( )
;0),(602
1112 ≠+
+−=
DtjD
DtjxDtxh (2.33)
where ,02 ≠D ,6D ,11D 0j and 1j are arbitrary constants such that 0602 ≠+ DtjD and
( ) .01112 ≠+− DtjxD

20
GROUP (IV)
Under the conditions ,0)( 0
1 ≠= hfefhf
hjf
eghg 3
2
1
10
)(
+
= and ,)( 201 jejhjhj += the
thin film equation (2.1) yields Lie classical group (IV), namely
,3
),,( 62110
2 Dtjjxjf
Dhtx +��
�
�−
−=ξ ( ) ,4
3),,( 710
2 DtjfD
htx +−=η
(2.34)
;0),,( 2 ≠= Dhtxζ
where ,02 ≠D ,01 ≠f ,01 ≠j ,6D ,7D ,0f ,1g 0j and 2j are arbitrary constants.
Similarity Solutions
Group (2.34), the invariant surface condition (2.3) and the thin film equation (2.1) imply
( ) ,0433
27102
621
10
2 ≠=��
���
�+−+�
�
���
�+��
�
�−
−DhDtjf
DhDtjjx
jfD tx
(2.35)
( ) ( ) ( ) ;03
220
2103
2
1011
10
0 =+++��
���
� ++−+
+
tx
hj
xxx
hjf
xxxxxxxx
hfhhjejh
jfheghhfhef
where ,02 ≠D ,01 ≠f ,01 ≠j ,6D ,7D ,0f ,1g 0j and 2j are arbitrary constants. As
0=xh gives 0=th in equation (2.35)2 , rendering equation (2.35)1 inconsistent, we
require .0≠xh
We consider the cases
(1) ( )( ) ,04 1010 ≠−− jfjf (2) ,010 ≠= jf (3) .04 10 ≠= jf
Case (1) ( )( ) 04 1010 ≠−− jfjf
By the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.35)1 and substitute its general solution into equation (2.35)2 . Therefore under
transformations (2.2) and the conditions ,0)( 0
1 ≠= hfefhf
hjf
eghg 3
2
1
10
)(
+
= and
,)( 201 jejhjhj += the similarity solution of the thin film equation (2.1) in connection
with group (2.34) and the constraints ( )( ) 04 1010 ≠−− jfjf is
;0ln)(),( 1211 ≠−+= DtDuytxh (2.36)

21
satisfying
[ ] ��
���
′+
+′′+′′′′+210)(
130
)4( )(3
2)()()()( 14 uy
jfuyeDuyuyfuy
uyD
[ ] ,0)()(
18
)(
17
)(
150016 =+′++ −− uyfuyfuyD
eDuyueDeD
,12Dt >
(2.37)
[ ] ��
���
′+
+′′+′′′′+210)(
130
)4( )(3
2)()()()( 14 uy
jfuyeDuyuyfuy
uyD
[ ] ,0)()(
18
)(
17
)(
150016 =−′−+ −− uyfuyfuyD
eDuyueDeD .12Dt <
In relations (2.36)-(2.37), 0)( ≠′ uy owing to the requirement .0≠xh Furthermore,
,02 ≠D ,04
3
10
11 ≠−
=jf
D ( ) ,03
21014 ≠−−= jfD ,00116 ≠−= fjD
( ),0
4 110
10
17 ≠−
−−=
fjf
jfD
( ),0
4
3
110
18 ≠−
=fjf
D ,04 10
10
21 ≠−
−−=
jf
jfD ,01 ≠f ,01 ≠j
,6D ,7D ( )
,4
3
102
7
12jfD
DD
−−= ,
1
113
f
gD −= ,
1
0
15f
jD = ,
3
10
2119
jf
jjD
−−=
( ),
3
102
6
20jfD
DD
−=
( )( )
,3
102
276
22jfD
jDDD
−
−= ,0f ,1g 0j and 2j are arbitrary constants
with ( )( ) .04 1010 ≠−− jfjf In addition, 02019 ≠++ DtDx and
( ) .022212
21 ≠+−−= DtjxDtuD
Case (2) 010 ≠= jf
Via the method of Lagrange [24], we solve equation (2.35)1 and substitute its general
solution into equation (2.35)2 . Hence under transformations (2.2) and the conditions
,0)( 1
1 ≠= hjefhf hj
eghg 1
1)( = and ,)( 201 jejhjhj += the similarity solution of the
thin film equation (2.1) in tandem with group (2.34) and the constraint 010 ≠= jf is
;0ln1
)(),( 11
1
≠−−= Dtj
uytxh (2.38)
satisfying

22
[ ]{ }2
1121
)4( )()()()()( uyjuyDuyuyjuy ′+′′+′′′′+
[ ] ,0)()(
15
)(
141311 =+′++ −− uyjuyj
eDuyeDD ,11Dt >
(2.39)
[ ]{ }2
1121
)4( )()()()()( uyjuyDuyuyjuy ′+′′+′′′′+
[ ] ,0)()(
15
)(
141311 =−′−+ −− uyjuyj
eDuyeDD .11Dt <
In relations (2.38)-(2.39), 0)( ≠′ uy owing to the requirement .0≠xh Furthermore,
,02 ≠D ,01
11
15 ≠−=jf
D ,01 ≠f ,01 ≠j ,6D ,7D ,12
7
11jD
DD = ,
1
112
f
gD −=
,1
0
13f
jD = ,
112
276
14fjD
jDDD
−= ,
12
276
16jD
jDDD
−= ,1g 0j and 2j are arbitrary constants,
011 ≠− Dt and ( ) .0ln 1116112 ≠−+−−= DtDDtjxu
Case (3) 04 10 ≠= jf
We consider the subcases (i) ,07 ≠D (ii) .07 =D
Subcase (i) ,04 10 ≠= jf 07 ≠D
By the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.35)1 and substitute its general solution into equation (2.35)2 . Therefore under
transformations (2.2) and the conditions ,0)( 14
1 ≠= hjefhf hj
eghg 12
1)( = and
,)( 201 jejhjhj += the similarity solution of the thin film equation (2.1) in connection
with group (2.34) and the constraints 04 10 ≠= jf and 07 ≠D is
;0)(),( 11 ≠+= tDuytxh (2.40)
satisfying
[ ]{ }2
1
)(2
121
)4( )(2)()()(4)( 1 uyjuyeDuyuyjuyuyj ′+′′+′′′′+ −
[ ] .0)()(4
15
)(4
14
)(3
13111 =+′++ −−− uyjuyjuyj
eDuyueDeD (2.41)
In relations (2.40)-(2.41), ,02 ≠D ,07 ≠D ,07
211 ≠=
D
DD ,0
17
1214 ≠−=
fD
jDD
,017
215 ≠=
fD
DD ,0
7
1216 ≠−=
D
jDD ,01 ≠f ,01 ≠j ,6D ,
1
112
f
gD −= ,
1
0
13f
jD =
,12
276
17jD
jDDD
−= ,
12
6
18jD
DD = ,1g 0j and 2j are arbitrary constants, 0182 ≠+− Dtjx
and ( ) .017216 ≠+−= Dtjxeu
tD Furthermore, 0)( ≠′ uy owing to the requirement
.0≠xh

23
Subcase (ii) 04 710 =≠= Djf
We directly solve equation (2.35)1 , substituting its general solution into equation (2.35)2.
Hence under transformations (2.2) and the conditions ,0)( 14
1 ≠= hjefhf hj
eghg 12
1)( =
and ,)( 201 jejhjhj += the similarity solution of thin film equation (2.1) in association
with group (2.34) and the constraints 04 710 =≠= Djf is
[ ] ;0)(ln1
),( 112
1
≠+−= tzDtjxj
txh (2.42)
such that
[ ] [ ] [ ] ,0)(2)()()( 5
1
3
1
2
0 =+−+′ tzftzgtzjtz ,0112 >+− Dtjx
(2.43)
[ ] [ ] [ ] ,0)(2)()()( 5
1
3
1
2
0 =+−−′ tzftzgtzjtz .0112 <+− Dtjx
In relations (2.42)-(2.43), ,02 ≠D ,01 ≠f ,01 ≠j ,6D ,12
6
11jD
DD = ,1g 0j and 2j are
arbitrary constants, 0)( >tz and .0112 ≠+− Dtjx
GROUP (V)
Subject to the conditions ( ) ,0)( 03
21 ≠+=g
fhfhf ( ) 0
21)(g
fhghg += and
,ln)( 120 jfhjhj ++= the thin film equation (2.1) admits Lie classical group (V),
namely
( ) ,),,( 6001 DtjxgDhtx ++=ξ ,),,( 701 DtgDhtx +=η ( ) ;0),,( 21 ≠+= fhDhtxζ
(2.44)
where ,01 ≠D ,01 ≠f ,6D ,7D ,2f ,0g ,1g 0j and 1j are arbitrary constants while
.02 ≠+ fh

24
Similarity Solutions
Group (2.44), the invariant surface condition (2.3) and the thin film equation (2.1) give
( ) ( ) ,021201100 ≠+=++++ fhhDtghDtjxg tx
(2.45)
( ) ( ) ( ) ��
���
�
+++−��
�
�
�
+++
2
2
0
21
2
03
2100
3xxx
g
xxxxxxxx
gh
fh
ghfhghh
fh
ghfhf
( ) ;0ln 120 =++++ tx hhjfhj
where ,01 ≠D ,01 ≠f ,6D ,7D ,1
6
11D
DD = ,
1
7
12D
DD = ,2f ,0g ,1g 0j and 1j are
arbitrary constants while .02 ≠+ fh As 0=xh forces 0=th in equation (2.45)2 ,
rendering equation (2.45)1 inconsistent, we require .0≠xh
We consider the cases
(1) ,00 ≠g (2) .00 =g
Case (1) 00 ≠g
Via the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.45)1 , substituting its general solution into equation (2.45)2 . Hence under
transformations (2.2) and the conditions ( ) ,0)( 03
21 ≠+=g
fhfhf ( ) 0
21)(g
fhghg +=
and ,ln)( 120 jfhjhj ++= the similarity solution of the thin film equation (2.1) in
association with group (2.44) and the constraint 00 ≠g is
;0)(),( 2
/1
13
0 ≠−−= fDtuytxhg
(2.46)
satisfying
[ ]
[ ]
��
��� ′
+′′+′′′′
+)(
)()(
)()(
)()(3)(
2
02
140
)4(
0 uy
uyguy
uy
D
uy
uyuyguy
g
[ ]
[ ] ,0)(1
)()(ln)(
1
0
103
10
= ��
���
+′−++ uyg
uyujuyjuyf
g ,13Dt >
(2.47)
[ ]
[ ]
��
��� ′
+′′+′′′′
+)(
)()(
)()(
)()(3)(
2
02
140
)4(
0 uy
uyguy
uy
D
uy
uyuyguy
g
[ ]
[ ] ,0)(1
)()(ln)(
1
0
103
10
= ��
���
+′−+− uyg
uyujuyjuyf
g .13Dt <

25
In relations (2.46)-(2.47), 0)( ≠′ uy owing to the requirement .0≠xh Furthermore,
,01 ≠D ,01 ≠f ,00 ≠g ,6D ,7D ,01
7
13gD
DD −= ,
1
1
14f
gD −= ,
0
0
15g
jD = ,
01
6
16gD
DD =
,2f ,1g 0j and 1j are arbitrary constants, 0ln 1315
13
1615 ≠−−−
++= DtD
Dt
DtDxu and
( )( ) .0161513 ≠++− DtDxDt
Case (2) 00 =g
We consider the subcases (i) ,07 ≠D (ii) .07 =D
Subcase (i) 007 =≠ gD
By the method of Lagrange [24], we solve equation (2.45)1 , substituting its general
solution into equation (2.45)2 . Therefore under transformations (2.2) and the conditions
,0)( 1 ≠= fhf 1)( ghg = and ,ln)( 120 jfhjhj ++= the similarity solution of the thin
film equation (2.1) in tandem with group (2.44) and the constraints 007 =≠ gD is
;0)(),( 2
/ 12 ≠−= feuytxhDt (2.48)
satisfying
[ ] .0)()()(ln)()( 16151413
)4( =+′++′′+ uyDuyDuyDuyDuy (2.49)
In relations (2.48)-(2.49), 0)( ≠′ uy owing to the requirement .0≠xh Furthermore,
,01 ≠D ,07 ≠D ,01
7
12 ≠=D
DD ,0
17
1
16 ≠=fD
DD ,01 ≠f ,6D ,
1
1
13f
gD −= ,
1
0
14f
jD =
,17
617
15fD
DjDD
−= ,
2 7
01
17D
jDD −= ,
7
6
18D
DD −= ,2f ,1g 0j and 1j are arbitrary
constants and .018
2
17 ≠++= tDtDxu
Subcase (ii) 007 == gD
We directly solve equation (2.45)1 , substituting its general solution into equation (2.45)2.
Hence under transformations (2.2) and the conditions ,0)( 1 ≠= fhf 1)( ghg = and
,ln)( 120 jfhjhj ++= the similarity solution of the thin film equation (2.1) in
connection with group (2.44) and the constraints 007 == gD is
;0)(),( 2601
1
≠−= +fetytxh
DtjD
xD
(2.50)
satisfying

26
( )
.0)()(ln)(3
601
14
601
1310
601
1 =���
�
���
�
++
+++
++′ ty
DtjD
D
DtjD
Djtyj
DtjD
Dty (2.51)
In relations (2.50)-(2.51), ,01 ≠D ,03
1114 ≠= DfD ,01 ≠f ,6D ,1113 gDD −= ,2f ,1g
0j and 1j are arbitrary constants such that 0601 ≠+ DtjD while 0)( ≠ty owing to the
requirement .0≠xh
GROUP (VI)
Under the conditions ( ) ,0)( 0
21 ≠+=f
fhfhf ( ) 3
2
21
10
)(jf
fhghg+
+= and
( ) ,)( 2201 jfhjhjj
++= the thin film equation (2.1) yields Lie classical group (VI),
namely
( )[ ] ,33
),,( 621101 Dtjjxjf
Dhtx +−−=ξ ( ) ,4
3),,( 710
1 DtjfD
htx +−=η
(2.52)
( ) ;0),,( 21 ≠+= fhDhtxζ
where ,01 ≠D ,01 ≠f ,01 ≠j ,6D ,7D ,0f ,2f ,1g 0j and 2j are arbitrary constants
while .02 ≠+ fh
Similarity Solutions
Group (2.52), the invariant surface condition (2.3) and the thin film equation (2.1) imply
( ) ( ) ,021514131211 ≠+=++++ fhhDtDhDtDxD tx
(2.53)
( ) ( )( )
( )txxx
jf
xxxxxxxx
fhh
fh
jfhfhghh
fh
fhfhf +�
�
���
�
+
+++−��
�
�
�
+++
+2
2
103
2
21
2
0
213
2100
( )[ ] ;02201 =+++ x
jhjfhj
where ,01 ≠D ,01 ≠f ,01 ≠j ,6D ,7D ,3
1011
jfD
−= ,2112 jjD −= ,
1
6
13D
DD =
,3
4 1014
jfD
−= ,
1
7
15D
DD = ,0f ,2f ,1g 0j and 2j are arbitrary constants while
.02 ≠+ fh Since 0=xh forces 0=th in equation (2.53)2 , rendering equation (2.53)1
inconsistent, we require .0≠xh

27
We consider the cases
(1) ( )( ) ,04 1010 ≠−− jfjf (2) ,010 ≠= jf (3) .04 10 ≠= jf
Case (1) ( )( ) 04 1010 ≠−− jfjf
Via the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.53)1 , substituting its general solution into equation (2.53)2 . Hence under
transformations (2.2) and the conditions ( ) ,0)( 0
21 ≠+=f
fhfhf ( ) 3
2
21
10
)(jf
fhghg+
+=
and ( ) ,)( 2201 jfhjhjj
++= the similarity solution of the thin film equation (2.1) in
association with group (2.52) and the constraints ( )( ) 04 1010 ≠−− jfjf is
;0)(),( 2
/1
16
14 ≠−−= fDtuytxhD
(2.54)
such that
[ ] [ ]
��
��� ′+
+′′+′′′′
+)(
)(
3
2)()(
)(
)()()(
2
10170
)4( 18
uy
uyjfuyuyD
uy
uyuyfuy
D
[ ] [ ]{ } [ ] ,0)()()()( 0020 1
222119 =+′++ −− ffDuyDuyuyuDuyD ,16Dt >
(2.55)
[ ] [ ]
��
��� ′+
+′′+′′′′
+)(
)(
3
2)()(
)(
)()()(
2
10170
)4( 18
uy
uyjfuyuyD
uy
uyuyfuy
D
[ ] [ ]{ } [ ] ,0)()()()( 0020 1
222119 =−′−+ −− ffDuyDuyuyuDuyD .16Dt <
In relations (2.54)-(2.55), 0)( ≠′ uy owing to the requirement .0≠xh Furthermore,
,01 ≠D ,03
4 1014 ≠
−=
jfD ( ) ,0
3
21018 ≠−−= jfD ,00120 ≠−= fjD
( ),0
4 110
10
21 ≠−
−−=
fjf
jfD
( ),0
4
3
110
22 ≠−
=fjf
D ,04 10
10
25 ≠−
−−=
jf
jfD ,01 ≠f
,01 ≠j ,6D ,7D ( )
,4
3
101
7
16jfD
DD
−−= ,
1
117
f
gD −= ,
1
0
19f
jD = ,
3
10
2123
jf
jjD
−−=
( ),
3
101
6
24jfD
DD
−=
( )( )
,3
101
276
26jfD
jDDD
−
−= ,0f ,2f ,1g 0j and 2j are arbitrary constants
with ( )( ) ,04 1010 ≠−− jfjf 02423 ≠++ DtDx and ( ) .026216
25 ≠+−−= DtjxDtuD

28
Case (2) 010 ≠= jf
By the method of Lagrange [24], we solve equation (2.53)1 , substituting its general
solution into equation (2.53)2 . Hence under transformations (2.2) and the conditions
( ) ,0)( 1
21 ≠+=j
fhfhf ( ) 1
21)(j
fhghg += and ( ) ,)( 2201 jfhjhjj
++= the similarity
solution of the thin film equation (2.1) in tandem with group (2.52) and the constraint
010 ≠= jf is
;0)(),( 2
/1
16
1 ≠−−=−
fDtuytxhj
(2.56)
satisfying
[ ]
��
��� ′
+′′+′′′′
+)(
)()(
)(
)()()(
2
1171
)4(
uy
uyjuyD
uy
uyuyjuy [ ]{ } )()( 1
1819 uyuyDDj ′++
−
[ ] ,0)( 11
20 =+ − juyD ,16Dt >
(2.57)
[ ]
��
��� ′
+′′+′′′′
+)(
)()(
)(
)()()(
2
1171
)4(
uy
uyjuyD
uy
uyuyjuy [ ]{ } )()( 1
1819 uyuyDDj ′−+
−
[ ] ,0)( 11
20 =− − juyD .16Dt <
In relations (2.56)-(2.57), 0)( ≠′ uy owing to the requirement .0≠xh Furthermore,
,01 ≠D ,01
11
20 ≠−=jf
D ,01 ≠f ,01 ≠j ,6D ,7D ,11
7
16jD
DD = ,
1
117
f
gD −=
,111
276
18fjD
jDDD
−= ,
1
0
19f
jD = ,
11
276
21jD
jDDD
−= ,2f ,1g 0j and 2j are arbitrary
constants, 016 ≠− Dt and ( ) .0ln 1621162 ≠−+−−= DtDDtjxu
Case (3) 04 10 ≠= jf
We consider the subcases (i) ,07 ≠D (ii) .07 =D
Subcase (i) ,04 10 ≠= jf 07 ≠D
Via the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.53)1 , substituting its general solution into equation (2.53)2 . Therefore under
transformations (2.2) and the conditions ( ) ,0)( 14
21 ≠+=j
fhfhf ( ) 12
21)(j
fhghg +=
and ( ) ,)( 2201 jfhjhjj
++= the similarity solution of the thin film equation (2.1) in
connection with group (2.52) and the constraints 04 10 ≠= jf and 07 ≠D is
;0)(),( 2
/ 15 ≠−= feuytxhDt
(2.58)
such that

29
[ ] [ ]
��
��� ′
+′′+′′′′
+−
)(
)(2)()(
)(
)()(4)(
2
1
2
161
)4( 1
uy
uyjuyuyD
uy
uyuyjuy
j
[ ] [ ]{ } )()()( 11 4
18
3
17 uyuyuDuyDjj ′++
−− [ ] .0)( 141
19 =+ − juyD (2.59)
In relations (2.58)-(2.59), 0)( ≠′ uy owing to the requirement .0≠xh Furthermore,
,01 ≠D ,07 ≠D ,01
7
15 ≠=D
DD ,0
17
1118 ≠−=
fD
jDD ,0
17
119 ≠=
fD
DD ,0
7
1122 ≠−=
D
jDD
,01 ≠f ,01 ≠j ,6D ,1
116
f
gD −= ,
1
0
17f
jD = ,
11
6
20jD
DD = ,
11
276
21jD
jDDD
−= ,2f ,1g
0j and 2j are arbitrary constants, 0202 ≠+− Dtjx and ( ) .022
212 ≠+−= tDeDtjxu
Subcase (ii) 04 710 =≠= Djf
We directly solve equation (2.53)1 , substituting its general solution into equation (2.53)2.
Hence under transformations (2.2) and the conditions ( ) ,0)( 14
21 ≠+=j
fhfhf
( ) 12
21)(j
fhghg += and ( ) ,)( 2201 jfhjhjj
++= the similarity solution of the thin film
equation (2.1) in tandem with group (2.52) and the constraints 04 710 =≠= Djf is
;0)(),( 2
/1
162
1 ≠−+−= fDtjxtytxhj
(2.60)
satisfying
[ ] [ ] [ ] ,0)()()()(
)(111 4
19
2
1817 =+++′ jjj
tyDtyDtyDty
ty ,0162 >+− Dtjx
(2.61)
[ ] [ ] [ ] ,0)()()()(
)(111 4
19
2
1817 =++−′ jjj
tyDtyDtyDty
ty .0162 <+− Dtjx
In relations (2.60)-(2.61), 0)( ≠ty owing to the requirement .0≠xh Furthermore,
,01 ≠D ,01 ≠f ,01 ≠j ,6D ,11
6
16jD
DD = ,
1
0
17j
jD =
( ),
12
1
1118
j
jgD
+−= ,2f ,1g ,0j
2j and ( )( )( )
4
1
111119
1121
j
jjjfD
+−−= are arbitrary constants and .0162 ≠+− Dtjx

30
GROUP (VII)
Under the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the thin film equation (2.1)
generates Lie classical group (VII), namely
( ) ,34
),,( 61
3 DtjxD
htx ++=ξ ,),,( 73 DtDhtx +=η );,(),,( 1 txbhDhtx +=ζ (2.62)
such that
;011 =++ txxxxx bbjbf (2.63)
where ,01 ≠f ,1D ,3D ,6D 7D and 1j are arbitrary constants.
Equation (2.63) admits the travelling wave solution of velocity ,1j namely
( )�=
−=3
0
1 ;),(n
n
n tjxdtxb (2.64)
where ,0d ,1d ,2d 3d and 1j are arbitrary constants.
Similarity Solutions
We construct similarity solutions of the thin film equation (2.1) for the cases
(a) ,03 ≠D (b) ,031 ≠DD ,)(),( 812 DtjxDtxb +−=
(c) ,03 =D (d) ,031 =≠ DD ,)(),( 812 DtjxDtxb +−=
(e) ,013 =≠ DD ,)(),( 812 DtjxDtxb +−= (f) ,031 == DD .)(),( 812 DtjxDtxb +−=
Similarity Solutions for Case (a)
Group (2.62), the invariant surface condition (2.3) and the thin film equation (2.1) imply
( ) ( ) ),,(34
17361
3 txbhDhDtDhDtjxD
tx +=++��
���
�++ ;011 =++ txxxxx hhjhf (2.65)
where ,03 ≠D ,01 ≠f ,1D ,6D 7D and 1j are arbitrary constants while ),( txb satisfies
equation (2.63), 073 ≠+ DtD and ( ) .034
61
3 ≠++ DtjxD
As 0=xh forces 0=th in
equation (2.65)2 , giving =),( txh constant, we require 0≠xh for system (2.65) to yield
nonconstant similarity solutions.
As case (e) includes the subcase ,0),(1 =+ txbhD we consider only .0),(1 ≠+ txbhD

31
By the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.65)1 and substitute its general solution into equation (2.65)2 . Therefore under
transformations (2.2) and the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the
similarity solution of the thin film equation (2.1) in association with group (2.62) and the
constraints 03 ≠D and 0),(1 ≠+ txbhD is
[ ] ;0),()(1
),(9
8
3
≠++= utKuyDtD
txhD
(2.66)
such that
,0),(),()()(4
1)( 989
)4(
1
9 =++++′−−
utKDtxbDtuyDuyuuyfD
,8Dt −>
(2.67)
,0),(),()()(4
1)( 989
)4(
1
9 =−+−−′+−
utKDtxbDtuyDuyuuyfD
.8Dt −<
In relations (2.66)-(2.67), ,03 ≠D ,01 ≠f ,c ,1D ,6D ,7D ,3
7
8D
DD = ,
3
19
D
DD =
( )
3
176
10
4
D
jDDD
−= and 1j are arbitrary constants. Furthermore, ),( txb satisfies
equation (2.63), ( ) ,034
613 ≠++ Dtjx
D ( ) 0101
4/1
8 ≠+−+=−
DtjxDtu and
[ ] 0),(),()(9
89 ≠+++ txbutKuyDtDD
while 0)( ≠′ uy as equations (2.67) otherwise
generate the contradiction [ ] .0),(),()(9
89 =+++ txbutKuyDtDD
In addition,
( ) ( )� −++++=−−
t
c
DdDjuDbDDutK .,),( 101
4/1
8
1
88
9 ωωωωωω As 0=xh forces
0=th in equation (2.65)2 , rendering equation (2.65)1 inconsistent for this subcase, we
require .0≠xh Owing to this requirement, [ ] .0),()( ≠+∂
∂utKuy
x

32
Similarity Solutions for Case (b)
Group (2.62), the invariant surface condition (2.3) and the thin film equation (2.1) give
( ) ( ) ,)(34
812173613 DtjxDhDhDtDhDtjx
Dtx +−+=++�
�
���
�++ ;011 =++ txxxxx hhjhf
(2.68)
where ,01 ≠D ,03 ≠D ,01 ≠f ,2D ,6D ,7D 8D and 1j are arbitrary constants while
073 ≠+ DtD and ( ) .034
613 ≠++ Dtjx
D As 0=xh gives 0=th in equation (2.68)2 ,
giving =),( txh constant, we require 0≠xh for system (2.68) to admit nonconstant
solutions.
We consider the subcases
(1) ( ) 8121 DtjxDhD +−+ ,0≠ (2) ( ) 8121 DtjxDhD +−+ .0=
Subcase (1) ( ) 8121 DtjxDhD +−+ 0≠
Via the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.68)1 , substituting its general solution into equation (2.68)2 . Hence under
transformations (2.2) and the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the
similarity solution of the thin film equation (2.1) in tandem with group (2.62) and the
constraints ,031 ≠DD ( ) 08121 ≠+−+ DtjxDhD and 812 )(),( DtjxDtxb +−= is
( ) ,0)(),( 131211191
10 ≠++−++= DDtjxDDtuytxhD
,4 13 DD ≠
(2.69)
( ) ,0ln)(),( 161412115
4/1
142 ≠+++−++= DDtDtjxDDtuytxh ;04 13 ≠= DD
satisfying
,0)()(4
1)( 1101
)4(
11 =+′− uyDuyuuyf ,0)(4
1)(
4
1)( 1522
)4(
21 =++′− uDuyuyuuyf
,9Dt −>
(2.70)
,0)()(4
1)( 1101
)4(
11 =−′+ uyDuyuuyf ,0)(4
1)(
4
1)( 1522
)4(
21 =−−′+ uDuyuyuuyf
.9Dt −<

33
In relations (2.69)-(2.70), ,01 ≠D ,03 ≠D ,03
110 ≠=
D
DD ,01 ≠f ,1j ,2D ,6D ,7D
,8D ,3
7
9D
DD = ,
4
4
13
211
DD
DD
−= ,
1
176
12D
jDDD
−= ,
1
8
13D
DD −= ,
4 1
7
14D
DD =
,4 1
215
D
DD =
( ),
2
1
811762
16D
DDjDDDD
−−=
( ),
4
3
176
17D
jDDD
−=
( )131
32
184DDD
DDD
−=
and ( )( )131
1762
194
4
DDD
jDDDD
−
−= are arbitrary constants. Furthermore, ( ) 03
461
3 ≠++ DtjxD
and ( ) .0171
4/1
9 ≠+−+=−
DtjxDtu
As 0=xh gives 0=th in equation (2.68)2 , rendering equation (2.68)1 inconsistent for
this subcase, we require .0≠xh Accordingly, 0)( 111
4/1
9
10 ≠+′+−
DuyDtD
and
.0ln)( 14152 ≠++′ DtDuy In addition, ( ) 0)( 1911891
10 ≠+−++ DtjxDDtuyD
and
( )( ) .04ln)( 1412115
4/1
142 ≠+++−++ DtDtjxDDtuy
Subcase (2) ( ) 08121 =+−+ DtjxDhD
As the constraint ( ) 8121 DtjxDhD −−−= identically satisfies equation (2.68)2 but forces
02 =D in equation (2.68)1 , system (2.68) yields only the constant solution. Hence under
transformations (2.2) and the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the sole
similarity solution of the thin film equation (2.1) in tandem with group (2.62) and the
constraints ( ) 0812131 =+−+≠ DtjxDhDDD and 812 )(),( DtjxDtxb +−= is the
constant solution.
Similarity Solutions for Case (c)
Group (2.62), the invariant surface condition (2.3) and the thin film equation (2.1) imply
),,(176 txbhDhDhD tx +=+ ;011 =++ txxxxx hhjhf (2.71)
where ,01 ≠f ,1D ,6D 7D and 1j are arbitrary constants while ),( txb satisfies
equation (2.63). As 0=xh forces 0=th in equation (2.71)2 , giving =),( txh constant,
we require 0≠xh for system (2.71) to admit nonconstant solutions.
The subcases arising are
(1) [ ] ,0),(17 ≠+ txbhDD (2) [ ] ,0),( 716 =≠+ DtxbhDD (3) ,0),(17 =+≠ txbhDD
(4) ,0),(176 =+=≠ txbhDDD (5) .0),(176 =+== txbhDDD

34
As case (f) includes subcases (3)-(5), we consider only subcases (1) and (2).
Subcase (1) [ ] 0),(17 ≠+ txbhDD
By the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.71)1 , substituting its general solution into equation (2.71)2 . Therefore under
transformations (2.2) and the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the
similarity solution of the thin film equation (2.1) in conjunction with group (2.62) and
the constraints 037 =≠ DD and 0),(1 ≠+ txbhD is
[ ] ;0),()(1
),( 8
7
≠+= utKuyeD
txhtD
(2.72)
such that
.0),(),()()()( 889
)4(
18 =+++′+ −
utKDetxbuyDuyDuyftD
(2.73)
In relations (2.72)-(2.73), ,07 ≠D ,01 ≠f ,c ,1D ,6D ,7
1
8D
DD = ,
7
617
9D
DjDD
−=
7
6
10D
DD = and 1j are arbitrary constants. Furthermore, ,10tDxu −=
( ) ,,),( 10108� +−= −
t
c
DdDtDxbeutK ωωωω
[ ] ,0),(),()(8
8 ≠++ txbutKuyeDtD
),( txb
satisfies equation (2.63) and 0)( ≠uy is a travelling wave of velocity .10D
As 0=xh forces 0=th in equation (2.71)2 , rendering equation (2.71)1 inconsistent for
this subcase, we require .0≠xh Owing to this requirement, [ ] .0),()( ≠+∂
∂utKuy
x
In addition, 0)( ≠′ uy as equation (2.73) otherwise gives rise to the contradiction
[ ] .0),(),()(8
8 =++ txbutKuyeDtD
Subcase (2) ,076 =≠ DD 0),(1 ≠+ txbhD
Via the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.71)1 , substituting its general solution into equation (2.71)2 . Hence under
transformations (2.2) and the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the
similarity solution of the thin film equation (2.1) in tandem with group (2.62) and the
constraints 0736 ==≠ DDD and 0),(1 ≠+ txbhD is
[ ] ;0),()(1
),( 8
6
≠+= txKtyeD
txhxD
(2.74)
such that

35
[ ] [ ] .0),(),()()( 88
912111019 =+++++++′ �−−
x
c
D
t
xD
xxxxxx detbDbetxbDbDbDbftyDty ωω ω
(2.75)
In results (2.74)-(2.75), [ ] 0),()()( ≠+ txKtyty and [ ] ,0),(),()( 8
8 ≠++ − xDetxbtxKtyD
noting that as 0=xh gives 0=th in equation (2.71)2 , rendering equation (2.71)1
inconsistent for this subcase, we require .0≠xh Furthermore, ( ) ,,),( 8�−=
x
c
DdtbetxK ωωω
),( txb satisfies equation (2.63) and ,06 ≠D ,01 ≠f ,c ,1D ,6
1
8D
DD =
,4
6
4
11
3
611
9D
DfDDjD
+= ,
6
11
10D
fDD = ,
2
6
2
11
11D
DfD =
3
6
3
11
3
61
12D
DfDjD
+= and 1j are
arbitrary constants.
Similarity Solutions for Case (d)
Group (2.62), the invariant surface condition (2.3) and the thin film equation (2.1) give
( ) ,812176 DtjxDhDhDhD tx +−+=+ ;011 =++ txxxxx hhjhf (2.76)
where ,01 ≠D ,01 ≠f ,2D ,6D ,7D 8D and 1j are arbitrary constants. As 0=xh
forces 0=th in equation (2.76)2 , giving =),( txh constant, we require 0≠xh for
system (2.76) to generate nonconstant solutions.
We consider the subcases
(1) ,07 ≠D ( ) ,08121 ≠+−+ DtjxDhD (2) ,076 =≠ DD ( ) ,08121 ≠+−+ DtjxDhD
(3) ( ) .08121 =+−+ DtjxDhD
Subcase (1) ,07 ≠D ( ) 08121 ≠+−+ DtjxDhD
By the method of Lagrange [24], the integrating factor algorithm [48] and the
Mathematica program [54], we obtain the general solution of system (2.76). Hence under
transformations (2.2) and the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the
similarity solution of the thin film equation (2.1) in tandem with group (2.62) and the
constraints ,0371 =≠ DDD ( ) 8121 DtjxDhD +−+ 0≠ and ( ) 812),( DtjxDtxb +−= is
( ) ( ) ;0),( 121
4
1
11109 ≠+−+= �
=
−DtjxDedetxh
n
tDxc
n
tD n (2.77)

36
where ,01 ≠D ,07 ≠D ,07
1
9 ≠=D
DD ,01 ≠f ,2D ,6D ,8D ,
7
6
10D
DD = ,
1
2
11D
DD −=
( ),
2
1
176281
12D
jDDDDDD
−+−=
( ),
1
1762
13D
jDDDD
−−= ,1j nc and nd are arbitrary
constants for all { }.4,3,2,1∈n
In addition, the travelling waves of velocity ,10D namely ( )
,04
1
10 ≠�=
−
n
tDxc
nned are such
that ( )
04
1
10 ≠�=
−
n
tDxc
nnnedc as the contradiction 01 =D otherwise occurs. Furthermore,
( ).013
4
1
1109 ≠+�
=
−DedeD
n
tDxc
n
tD n We require ( )
011
4
1
109 ≠+�=
−Dedce
n
tDxc
nn
tD n as 0≠xh is
necessary for equation (2.76)1 to be consistent for this subcase.
For the scenario ,176 jDD = ,0
4/1
17
1
1 ≠
���
�−−=
fD
Dc ,0
4/1
17
1
2 ≠
���
�−=
fD
Dc
0
4/1
17
1
3 ≠
���
�−−=
fD
Dic and ,0
4/1
17
1
4 ≠
���
�−=
fD
Dic where .1−=i
Subcase (2) ,076 =≠ DD ( ) 08121 ≠+−+ DtjxDhD
We solve system (2.76) via the method of Lagrange [24] and the integrating factor
algorithm [48]. Hence under transformations (2.2) and the conditions ,0)( 1 ≠= fhf
0)( =hg and ,)( 1jhj = the similarity solution of the thin film equation (2.1) in tandem
with group (2.62) and the constraints ,07361 ==≠ DDDD ( ) 08121 ≠+−+ DtjxDhD
and ( ) 812),( DtjxDtxb +−= is
( ) ( ) ;0),( 131129
1110 ≠+−+= −DtjxDeDtxh
tDxD (2.78)
where ,01 ≠D ,06 ≠D ,09 ≠D ,06
1
10 ≠=D
DD ,01 ≠f ,2D ,8D ,
3
6
3
61
3
11
11D
DjDfD
+=
,1
2
12D
DD −=
2
1
6281
13D
DDDDD
+−= and 1j are arbitrary constants. Furthermore,
( )012109
1110 ≠+−DeDD
tDxD as we require 0≠xh for equation (2.76)1 to be consistent for
this subcase.

37
Subcase (3) ( ) 08121 =+−+ DtjxDhD
The constraint ( ) 08121 =+−+ DtjxDhD identically satisfies equation (2.76)2 but
causes equation (2.76)1 to give the scenarios
(i) ,02 =D (ii) .176 jDD =
Scenario (i) 0281 ==+ DDhD
Under transformations (2.2) and the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj =
the similarity solution of the thin film equation (2.1) in connection with group (2.62) and
the constraints 081321 =+==≠ DhDDDD and 8),( Dtxb = is the constant solution.
Scenario (ii) ,176 jDD = ( ) 08121 =+−+ DtjxDhD
Under transformations (2.2) and the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj =
the similarity solution of the thin film equation (2.1) in association with group (2.62) and
the constraints ,031 =≠ DD ,176 jDD = ( ) 08121 =+−+ DtjxDhD and
( ) 812),( DtjxDtxb +−= is the travelling wave of velocity ,1j namely
( ) ;),( 1019 DtjxDtxh +−= (2.79)
where ,01 ≠D ,2D ,8D ,1
2
9D
DD −=
1
8
10D
DD −= and 1j are arbitrary constants. We
require 09 ≠D for solution (2.79) to be nonconstant.
From the constraint 176 jDD = on this case, it follows that 067 =≠ DD forces ,01 =j
reducing the travelling wave (2.79) to a steady state solution.
Similarity Solutions for Case (e)
Group (2.62), the invariant surface condition (2.3) and the thin film equation (2.1) imply
( ) ( ) ( ) ,34
8127361
3 DtjxDhDtDhDtjxD
tx +−=++��
���
�++ ;011 =++ txxxxx hhjhf (2.80)
where ,03 ≠D ,01 ≠f ,2D ,6D ,7D 8D and 1j are arbitrary constants while
073 ≠+ DtD and ( ) .034
61
3 ≠++ DtjxD
As 0=xh gives 0=th in equation (2.80)2 ,
forcing =),( txh constant, we require 0≠xh for system (2.80) to admit nonconstant
solutions.

38
By the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.80)1 , substituting its solution into equation (2.80)2 . Therefore under
transformations (2.2) and the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the
similarity solution of the thin film equation (2.1) in tandem with group (2.62) and the
constraints 013 =≠ DD and ( ) 812),( DtjxDtxb +−= is
( ) ;ln)(),( 91211110 DtDDtjxDuytxh +++−+= (2.81)
satisfying
,0)(4
1)( 12
)4(
1 =+′− Duyuuyf ,9Dt −>
(2.82)
,0)(4
1)( 12
)4(
1 =−′+ Duyuuyf .9Dt −<
In relations (2.81)-(2.82), ,03 ≠D ,01 ≠f ,2D ,6D ,7D ,8D ,3
7
9D
DD = ,
4
3
2
10D
DD =
( ),
4
3
176
11D
jDDD
−=
( )2
3
836172
12
4
D
DDDjDDD
+−= and 1j are arbitrary constants,
( ) 034
61
3 ≠++ DtjxD
and ( ) .0111
4/1
9 ≠+−+=−
DtjxDtu For solution (2.81) to be
nonconstant, we require .0)( 10
4/1
9 ≠+′+−
DuyDt
Similarity Solutions for Case (f)
Group (2.62), the invariant surface condition (2.3) and the thin film equation (2.1) give
( ) ,81276 DtjxDhDhD tx +−=+ ;011 =++ txxxxx hhjhf (2.83)
where ,01 ≠f ,2D ,6D ,7D 8D and 1j are arbitrary constants. As 0=xh forces 0=th
in equation (2.83)2 , forcing =),( txh constant, we require 0≠xh for system (2.83) to
generate nonconstant solutions.
As no similarity solutions arise for the thin film equation (2.1) when ,076 == DD we
consider only the subcases
(1) ,07 ≠D (2) .076 =≠ DD
Subcase (1) 07 ≠D
Via the method of Lagrange [24] and the Mathematica program [54], we obtain the
general solution of system (2.83). Hence under transformations (2.2) and the conditions
,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the similarity solution of thin film equation (2.1)

39
in connection with group (2.62) and the constraints 0317 ==≠ DDD and
( ) 812),( DtjxDtxb +−= is
( ) ( ) ( ) ( ) ,),( 2
141312
2
9119102191 tDtDxDtDxDtDxDeddtxhtDxc +++−+−++= −
,176 jDD ≠
(2.84)
( ) ( )[ ] ,),( 13112
5
0
1 tDtjxDtjxdtxhn
n
n +−+−=�=
.176 jDD =
In solutions (2.84), ,0
3/1
17
617
1 ≠
���
� −−=
fD
DjDc ,07 ≠D ,01 ≠f ,2D ,6D ,8D
,7
6
9D
DD = ,
176
8
10jDD
DD
−=
( ),
2 176
2
11jDD
DD
−= ,
7
2
12D
DD = ,
7
8
13D
DD =
( ),
22
7
1762
14D
jDDDD
+−= ,0d ,1d ,2d ,3d ,
24 17
8
4fD
Dd −=
17
2
5120 fD
Dd −= and 1j are
arbitrary constants.
Furthermore, ( ) ( )022 91
21101191211 ≠++−+ − tDxcedcDtDDDxD and
( ) 012
5
1
1
1 ≠+−�=
−tDtjxnd
n
n
n as we require 0≠xh for solutions (2.84) to be nonconstant.
In addition, ( ) ( )02 91
2110911 ≠++− − tDxcedcDtDxD and ( ) .0
5
1
1
1 ≠−�=
−
n
n
n tjxnd
Subcase (2) 076 =≠ DD
We directly solve equation (2.83)1 , substituting its general solution into equation (2.83)2.
Therefore under transformations (2.2) and the conditions ,0)( 1 ≠= fhf 0)( =hg and
,)( 1jhj = the similarity solution of thin film equation (2.1) in tandem with group (2.62)
and the constraints 07316 ===≠ DDDD and ( ) 812),( DtjxDtxb +−= is the
travelling wave of velocity ,1j namely
( ) ( ) ;),( 11110
2
19 DtjxDtjxDtxh +−+−= (2.85)
where ,06 ≠D ,2D ,8D ,2 6
2
9D
DD = ,
6
8
10D
DD = 11D and 1j are arbitrary constants. For
solution (2.85) to be nonconstant requires ( ) .0812 ≠+− DtjxD

40
GROUP (VIII)
Under conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = the thin film equation (2.1)
yields Lie classical group (VIII), namely
,),,( 6Dhtx =ξ ,),,( 7Dhtx =η );,(),,( 1 txbhDhtx +=ζ (2.86)
such that
;0111 =++− txxxxxxx bbjbgbf (2.87)
where ,01 ≠f ,1D ,6D ,7D 1g and 1j are arbitrary constants.
Equation (2.87) admits the travelling wave solution of velocity ,1j namely
( ) ( ) ( );),( 1515
43121
tjxdtjxdededtjxddtxb
−−− ++−+= (2.88)
where ,01
1
5 ≠=f
gd ,01 ≠f ,01 ≠g ,1d ,2d ,3d 4d and 1j are arbitrary constants.
As equation (2.63) is a special case of equation (2.87) with ,01 =g solution (2.64) of
equation (2.63) is also a solution of equation (2.87) under the restriction .01 =g
Similarity Solutions
We obtain similarity solutions of the thin film equation (2.1) for the cases
(a) ),( txb is an arbitrary solution of equation (2.87),
(b) ,01 ≠D ,)(),( 812 DtjxDtxb +−= (c) ,01 =D .)(),( 812 DtjxDtxb +−=
Similarity Solutions for Case (a)
Group (2.86), the invariant surface condition (2.3) and the thin film equation (2.1) give
),,(176 txbhDhDhD tx +=+ ;0111 =++− txxxxxxx hhjhghf (2.89)
where ,01 ≠f ,1D ,6D ,7D 1g and 1j are arbitrary constants while ),( txb is an
arbitrary solution of equation (2.87). As 0=xh gives 0=th in equation (2.89)2 , forcing
=),( txh constant, we require 0≠xh for system (2.89) to generate nonconstant
solutions.
The subcases occurring are
(1) [ ] ,0),(17 ≠+ txbhDD (2) [ ] ,0),( 716 =≠+ DtxbhDD (3) ,0),(17 =+≠ txbhDD
(4) ,0),(176 =+=≠ txbhDDD (5) .0),(176 =+== txbhDDD

41
As case (c) includes subcases (3)-(5), we consider only subcases (1) and (2).
Subcase (1) [ ] 0),(17 ≠+ txbhDD
By the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.89)1 , substituting its general solution into equation (2.89)2 . Hence under
transformations (2.2) and the conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = the
similarity solution of the thin film equation (2.1) in association with group (2.86) and the
constraints [ ] 0),(17 ≠+ txbhDD (with ),( txb an arbitrary solution of equation (2.87)) is
[ ] ;0),()(1
),( 8
7
≠+= utKuyeD
txhtD
(2.90)
satisfying
.0),(),()()()()( 8891
)4(
18 =+++′+′′− −
utKDetxbuyDuyDuyguyftD
(2.91)
In relations (2.90)-(2.91), ,07 ≠D ,01 ≠f ,c ,1D ,6D ,7
1
8D
DD = ,
7
617
9D
DjDD
−=
,7
6
10D
DD = 1g and 1j are arbitrary constants and .10tDxu −= Furthermore,
( ) ,,),( 10108� +−= −
t
c
DdDtDxbeutK ωωωω
[ ] 0),(),()(8
8 ≠++ txbutKuyeDtD
and ),( txb
is an arbitrary solution of equation (2.87).
In addition, 0)( ≠uy is a travelling wave of velocity 10D such that 0)( ≠′ uy as
equation (2.91) otherwise leads to the contradiction [ ] .0),(),()(8
8 =++ txbutKuyeDtD
Furthermore, 0)( ≠∂
∂+′
x
Kuy as we require 0≠xh for equation (2.89)1 to be consistent
for this subcase.
This subcase includes subcase (1) of case (c) in relation to group (2.62) as results (2.72)-
(2.73) and equation (2.63) are a special case of results (2.90)-(2.91) and equation (2.87)
respectively under the restriction .01 =g
Subcase (2) [ ] 0),( 716 =≠+ DtxbhDD
Via the method of Lagrange [24] and the integrating factor algorithm [48], we solve
equation (2.89)1 , substituting its general solution into equation (2.89)2 . Therefore under
transformations (2.2) and the conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = the
similarity solution of the thin film equation (2.1) in tandem with group (2.86) and the
constraints [ ] 0),( 716 =≠+ DtxbhDD (with ),( txb satisfying equation (2.87)) is

42
[ ] ;0),()(1
),( 8
6
≠+= txKtyeD
txhxD
(2.92)
such that
[ ] [ ] .0),(),()()( 88
912111019 =+++++++′ �−−
x
c
D
t
xD
xxxxxx detbDbetxbDbDbDbftyDty ωω ω
(2.93)
In results (2.92)-(2.93), [ ] 0),()()( ≠+ txKtyty and [ ] ,0),(),()( 8
8 ≠++ − xDetxbtxKtyD
noting that we require 0≠xh for equation (2.89)1 to be consistent for this subcase.
Furthermore, ( ) ,,),( 8�−=
x
c
DdtbetxK ωωω
),( txb satisfies equation (2.87) and ,06 ≠D
,01 ≠f ,c ,1g ,1j ,1D ,6
1
8D
DD =
( ),
4
6
3
611
2
611
4
11
9D
DDjDDgDfD
+−= ,
6
11
10D
fDD =
2
6
2
61
2
11
11D
DgDfD
−= and
3
6
3
61
2
611
3
11
12D
DjDDgDfD
+−= are arbitrary constants.
This subcase includes subcase (2) of case (c) in relation to group (2.62) as results (2.74)-
(2.75) and equation (2.63) are a special case of results (2.92)-(2.93) and equation (2.87)
respectively under the restriction .01 =g
Similarity Solutions for Case (b)
Group (2.86), the invariant surface condition (2.3) and the thin film equation (2.1) imply
( ) ,812176 DtjxDhDhDhD tx +−+=+ ;0111 =++− txxxxxxx hhjhghf (2.94)
where ,01 ≠D ,01 ≠f ,2D ,6D ,7D ,8D 1g and 1j are arbitrary constants. As 0=xh
forces 0=th in equation (2.94)2 , giving =),( txh constant, we require 0≠xh for
system (2.94) to admit nonconstant solutions.
We consider the subcases
(1) ,07 ≠D ( ) ,08121 ≠+−+ DtjxDhD (2) ,076 =≠ DD ( ) ,08121 ≠+−+ DtjxDhD
(3) ( ) .08121 =+−+ DtjxDhD
Subcase (1) ,07 ≠D ( ) 08121 ≠+−+ DtjxDhD
By the method of Lagrange [24], the integrating factor algorithm [48] and the
Mathematica program [54], we solve system (2.94). Hence under transformations (2.2)
and the conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = the similarity solution of the

43
thin film equation (2.1) in conjunction with group (2.86) and the constraints ,071 ≠DD
( ) 08121 ≠+−+ DtjxDhD and ( ) 812),( DtjxDtxb +−= is
( ) ( ) ;0),( 121
4
1
11109 ≠+−+= �
=
−DtjxDedetxh
n
tDxc
n
tD n (2.95)
where ,01 ≠D ,07 ≠D ,07
1
9 ≠=D
DD ,nc ,nd ,1j ,2D ,6D ,8D ,
7
6
10D
DD =
,1
2
11D
DD −=
( )2
1
176281
12D
jDDDDDD
−+−= and
( )
1
1762
13D
jDDDD
−−= are arbitrary
constants for all { }.4,3,2,1∈n
Furthermore, ( )
04
1
10 ≠�=
−
n
tDxc
nnnedc as the contradiction 01 =D otherwise arises. In
addition, ( )
013
4
1
1109 ≠+�
=
−DedeD
n
tDxc
n
tD n and as 0≠xh is necessary for equation (2.94)1
to be consistent for this subcase, ( )
.011
4
1
109 ≠+�=
−Dedce
n
tDxc
nn
tD n
This subcase includes subcase (1) of case (d) for group (2.62) as solution (2.77) is a
special case of solution (2.95) with .01 =g
Subcase (2) ,076 =≠ DD ( ) 08121 ≠+−+ DtjxDhD
Via the method of Lagrange [24] and the integrating factor algorithm [48], we obtain the
general solution of system (2.94). Therefore under transformations (2.2) and the
conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = the similarity solution of the thin
film equation (2.1) in tandem with group (2.86) and the constraints ,0761 =≠ DDD
( ) 08121 ≠+−+ DtjxDhD and ( ) 812),( DtjxDtxb +−= is the sum of two travelling
waves with respective velocities 1j and ,11D namely
( ) ( ) ;0),( 131129
1110 ≠+−+= −DtjxDeDtxh
tDxD (2.96)
where ,01 ≠D ,06 ≠D ,09 ≠D ,06
1
10 ≠=D
DD ,01 ≠f ,2D ,8D
,3
6
3
61
2
611
3
11
11D
DjDDgDfD
+−= ,
1
2
12D
DD −= ,
2
1
6281
13D
DDDDD
+−= 1g and 1j are
arbitrary constants.

44
Furthermore, ( )
0121091110 ≠+−
DeDDtDxD
as ( ) 08121 ≠+−+ DtjxDhD and as we require
0≠xh for equation (2.94)1 to be consistent for this subcase. For the case
,02
1011 ≠= Dfg solution (2.96) reduces to a single travelling wave of velocity .1j
This subcase incorporates subcase (2) of case (d) for group (2.62) as solution (2.78) is a
special case of solution (2.96) with .01 =g
Subcase (3) ( ) 08121 =+−+ DtjxDhD
The constraint ( ) 08121 =+−+ DtjxDhD identically satisfies equation (2.94)2 but
causes equation (2.94)1 to give the scenarios
(i) ,02 =D (ii) .176 jDD =
Scenario (i) 0281 ==+ DDhD
Under transformations (2.2) and the conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj =
the constant solution is the sole similarity solution of the thin film equation (2.1) in
tandem with group (2.86) and the constraints 08121 =+=≠ DhDDD and .),( 8Dtxb =
Scenario (ii) ( ) ,08121 =+−+ DtjxDhD 176 jDD =
Under transformations (2.2) and the conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj =
the similarity solution of the thin film equation (2.1) in connection with group (2.86) and
constraints ,01761 =−≠ jDDD ( ) 08121 =+−+ DtjxDhD and ( ) 812),( DtjxDtxb +−=
is the travelling wave of velocity ,1j namely
( ) ;),( 1019 DtjxDtxh +−= (2.97)
where ,01 ≠D ,2D ,8D ,1
2
9D
DD −=
1
8
10D
DD −= and 1j are arbitrary constants. For
solution (2.97) to be nonconstant requires .09 ≠D
Subcase (3) of case (b) for group (2.86) generates results identical to those of subcase (3)
for case (d) in relation to group (2.62).

45
Similarity Solutions for Case (c)
Group (2.86), the invariant surface condition (2.3) and the thin film equation (2.1) give
( ) ,81276 DtjxDhDhD tx +−=+ ;0111 =++− txxxxxxx hhjhghf (2.98)
where ,01 ≠f ,2D ,6D ,7D ,8D 1g and 1j are arbitrary constants. As 0=xh gives
0=th in equation (2.98)2 , forcing =),( txh constant, we require 0≠xh for system
(2.98) to yield nonconstant solutions.
As no similarity solutions occur for the thin film equation (2.1) when ,076 == DD we
consider only the subcases
(1) ,07 ≠D (2) .076 =≠ DD
Subcase (1) 07 ≠D
By the method of Lagrange [24] and the Mathematica program [54], we solve system
(2.98) for the case .01 ≠g Hence under transformations (2.2) and the conditions
,0)( 1 ≠= fhf 0)( 1 ≠= ghg and ,)( 1jhj = the similarity solution of the thin film
equation (2.1) in tandem with group (2.86) and the constraints 017 =≠ DD and
( ) 812),( DtjxDtxb +−= is
( ) ( ) ( ) ( ) ,),( 2
141312
2
911910
4
2
19 tDtDxDtDxDtDxDeddtxh
n
tDxc
nn +++−+−++= �
=
−
,176 jDD ≠
(2.99)
( ) ( ) ( ) ( )[ ] ,),( 13112
6
5
14
1
1
1115 tDtjxDedtjxdtxh
n
tjxD
n
n
n
n
n
+−++−= ��=
−−
=
− .176 jDD =
In solutions (2.99), ,07 ≠D ,01
1
15 ≠=f
gD ,01 ≠f ,01 ≠g ,2c ,3c ,4c ,nd ,1j ,2D
,6D ,8D ,7
6
9D
DD =
( )( )
,2
176
1721768
10jDD
gDDjDDDD
−
−−=
( ),
2 176
2
11jDD
DD
−= ,
7
2
12D
DD =
7
8
13D
DD = and
( )2
7
1762
142D
jDDDD
+−= are arbitrary constants for all { }6,5,4,3,2,1∈n .
For solutions (2.99) to be nonconstant, we require .0≠xh Therefore,
( ) ( ) ( ) ( ) ( )011 12
6
5
1
15
4
2
2
1115 ≠+−+−− ��
=
−−
=
−tDeDdtjxdn
n
tjxDn
n
n
n
n
n
and

46
( ) ( ) .022 101191211
4
2
9 ≠+−++�=
−DtDDDxDedc
n
tDxc
nnn Nonconstancy of solutions (2.99)1
and (2.99)2 further requires ( ) ( ) 02 10911
4
2
9 ≠+−+�=
−DtDxDedc
n
tDxc
nnn and
( ) ( ) ( ) ( ) ( )011
6
5
1
15
4
2
2
1115 ≠−+−− ��
=
−−
=
−
n
tjxDn
n
n
n
n
n
eDdtjxdn respectively.
Solutions (2.84) are the similarity solutions of the thin film equation (2.1) for this
subcase when 01 =g (in tandem with group (2.86) under transformations (2.2) and the
conditions ,0)( 1 ≠= fhf 0)( =hg and 1)( jhj = ).
Subcase (2) 076 =≠ DD
We directly solve equation (2.98)1 , substituting its general solution into equation (2.98)2
and solving the resulting equation. Hence under transformations (2.2) and the conditions
,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = the similarity solution of the thin film equation
(2.1) in association with group (2.86) and the constraints 0716 ==≠ DDD and
( ) 812),( DtjxDtxb +−= is
( ) ( ) ;),( 1211110
2
19 DtDtjxDtjxDtxh ++−+−= (2.100)
where ,06 ≠D ,2D ,8D ,2 6
2
9D
DD = ,
6
8
10D
DD = ,
6
12
11D
gDD = ,12D 1g and 1j are
arbitrary constants. For solution (2.100) to be nonconstant requires ( ) .0812 ≠+− DtjxD
This subcase includes subcase (2) of case (f) for group (2.62) as solution (2.85) is a
special case of solution (2.100) with .01 =g
The infinitesimal generators 821 ,...,, VVV denote the Lie algebras for the respective Lie
groups (I), (II),…, (VIII); (see Gandarias [27]). These generators are as follows.

47
A List of Infinitesimal Generators for Groups (I)-(VIII)
The generators 821 ,...,, VVV for the respective groups (I), (II),…, (VIII) are
,761t
Dx
DV∂
∂+
∂
∂=
( )[ ] ( ) ,43 746142t
DtDx
DtjxDV∂
∂++
∂
∂++=
( )[ ] ( ) ,270260023h
Dt
DtgDx
DtjxgDV∂
∂+
∂
∂++
∂
∂++=
( ) ,433
2710
2
621
10
24h
Dt
DtjfD
xDtjjx
jfDV
∂
∂+
∂
∂��
���
�+−+
∂
∂��
���
�+
��
�−
−=
( )[ ] ( ) ( ) ,2170160015h
fhDt
DtgDx
DtjxgDV∂
∂++
∂
∂++
∂
∂++=
( )[ ] ( ) ( ) ,43
33
21710
1
62110
1
6h
fhDt
DtjfD
xDtjjxjf
DV
∂
∂++
∂
∂��
���
�+−+
∂
∂
���
���
+−−=
( ) ( ) ( )[ ] ,,34
17361
3
7h
txbhDt
DtDx
DtjxD
V∂
∂++
∂
∂++
∂
∂��
���
�++=
( )[ ] ;,1768h
txbhDt
Dx
DV∂
∂++
∂
∂+
∂
∂=
where details of 821 ,...,, VVV relate to the respective groups (I), (II),…, (VIII).
Next, we present four tables of results. Table 1 features the functions ),(hf )(hg and
)(hj (distinguishing the Lie classical symmetries of the thin film equation (2.1)) with
their associated infinitesimal generators .iV Table 2 is a dimensional classification of the
mathematical structure of groups (I)-(VIII) and the corresponding iV . Table 3 displays
the similarity solutions ),( txh with their similarity variables (where applicable) for the
thin film equation (2.1) in conjunction with groups (I)-(VIII). Table 4 shows the defining
ordinary differential equations (ODEs) for the functions within the functional forms of
),( txh relating to groups (I)-(VIII) in table 3.

48
2.3 TABLES OF RESULTS
Table 1. Each row lists functions ),(hf )(hg and )(hj (distinguishing the Lie classical
symmetries of thin film equation (2.1)) with the associated infinitesimal generator .iV
Group )(hf )(hg )(hj iV
I arbitrary 0≠ arbitrary arbitrary 1V
II arbitrary 0≠ 0 1j 2V
III 003
1 ≠hgef
hgeg 0
1 10 jhj + 3V
IV 00
1 ≠hfef h
jf
eg 3
2
1
10 +
20
1 jejhj + 4V
V ( ) 003
21 ≠+g
fhf ( ) 0
21
gfhg + 120 ln jfhj ++ 5V
VI ( ) 00
21 ≠+f
fhf ( ) 3
2
21
10 jf
fhg+
+ ( ) 2201 jfhjj
++ 6V
VII 01 ≠f 0 1j 7V
VIII 01 ≠f 1g 1j 8V
Table 2. A dimensional classification of the mathematical structure of groups (I)-(VIII)
(Lie classical symmetries of thin film equation (2.1)) with their associated infinitesimal
generators .iV
Group ),,( htxξ ),,( htxη ),,( htxζ iV
I 6D 7D 0
1V
II ( ) 03 614 ≠++ DtjxD 04 74 ≠+ DtD 0 2V
III ( ) 6002 DtjxgD ++ 702 DtgD + 02 ≠D 3V
IV 621
10
23
Dtjjxjf
D +
��
�−
− ( ) 710
2 43
DtjfD
+− 02 ≠D 4V
V ( ) 6001 DtjxgD ++ 701 DtgD + ( ) 021 ≠+ fhD 5V
VI ( )[ ] 62110
1 33
DtjjxjfD
+−− ( ) 7101 4
3Dtjf
D+−
( ) 021 ≠+ fhD 6V
VII ( ) 61
3 34
DtjxD
++ 73 DtD + ( )txbhD ,1 + 7V
VIII 6D 7D ( )txbhD ,1 + 8V

49
Table 3. All rows show the similarity solutions ),( txh and any corresponding similarity
variables iu for the thin film equation (2.1) in connection with groups (I)-(VIII). The
cases 2, 3(1), 7(c1) and 8(b3i) refer to group (II), group (III) case (1), group (VII) case
(c) subcase (1) and group (VIII) case (b) subcase (3) scenario (i) respectively. Other
similarly-named cases in this table use the same denotation pattern.
Case ),( txh iu
1(1) )(uy under the constraint 07 ≠D tDx 11−
1(2) constant under the constraints 076 =≠ DD
2 )(uy ( ) 0121
4/1
11 ≠+−−−
DtjxDt
3(1) 0ln
1)( 11
0
≠−+ Dtg
uy
under the constraint 00 ≠g
0ln 1116
11
1716 ≠−−−
++DtD
Dt
DtDx
3(2i) 0)( 11 ≠+ tDuy
under the constraints 007 =≠ gD
013
2
12 ≠++ tDtDx
3(2ii) ( )0
602
1112 ≠+
+−
DtjD
DtjxD
under the constraints 007 == gD
4(1) 0ln)( 1211 ≠−+ DtDuy under the
constraints ( )( ) 04 1010 ≠−− jfjf
( ) 022212
21 ≠+−− DtjxDtD
4(2) 0ln
1)( 11
1
≠−− Dtj
uy
under the constraint 010 ≠= jf
( ) 0ln 1116112 ≠−+−− DtDDtjx
4(3i) 0)( 11 ≠+ tDuy under the constraints
04 10 ≠= jf and 07 ≠D
( ) 017216 ≠+− Dtjxe
tD
4(3ii) [ ] 0)(ln1
112
1
≠+− tzDtjxj
under the
constraints 04 710 =≠= Djf
t
5(1) 0)( 2
/1
13
0 ≠−− fDtuyg
under the constraint 00 ≠g
0ln 1315
13
1615 ≠−−−
++DtD
Dt
DtDx
5(2i) 0)( 2
/ 12 ≠− feuyDt
under the constraints 007 =≠ gD
018
2
17 ≠++ tDtDx
5(2ii) 0)( 2
601
1
≠−+fety
DtjD
xD
under the constraints 007 == gD
t

50
Table 3. Continued.
Case ),( txh iu
6(1) 0)( 2
/1
16
14 ≠−− fDtuyD
under the constraints ( )( ) 04 1010 ≠−− jfjf
( ) 026216
25 ≠+−− DtjxDtD
6(2) 0)( 2
/1
16
1 ≠−−−
fDtuyj
under the constraint 010 ≠= jf
( ) 0ln 1621162 ≠−+−− DtDDtjx
6(3i) 0)( 2
/ 15 ≠− feuyDt
under the constraints 04 10 ≠= jf and 07 ≠D
( ) 022
212 ≠+− tDeDtjx
6(3ii) 0)( 2
/1
162
1 ≠−+− fDtjxtyj
under the constraints 04 710 =≠= Djf
t
7(a) [ ] 0),()(
1 9
8
3
≠++ utKuyDtD
D
under the constraints 03 ≠D and 0),(1 ≠+ txbhD
( ) 0101
4/1
8 ≠+−+−
DtjxDt
7(b1) ( ) 0)( 131211191
10 ≠++−++ DDtjxDDtuyD
under the constraints ,031 ≠DD ,4 13 DD ≠
( ) 08121 ≠+−+ DtjxDhD and
( ) ,),( 812 DtjxDtxb +−=
( ) 0ln)( 161412115
4/1
142 ≠+++−++ DDtDtjxDDtuy
under the constraints ,04 13 ≠= DD
( ) 08121 ≠+−+ DtjxDhD and
( ) 812),( DtjxDtxb +−=
( ) 0171
4/1
9 ≠+−+−
DtjxDt
7(b2) constant under the constraints
( ) 0812131 =+−+≠ DtjxDhDDD and
( ) 812),( DtjxDtxb +−=
7(c1) [ ] 0),()(
18
7
≠+ utKuyeD
tD under the constraints
037 =≠ DD and 0),(1 ≠+ txbhD
tDx 10−
7(c2) [ ] 0),()(
18
6
≠+ txKtyeD
xD under the constraints
0736 ==≠ DDD and 0),(1 ≠+ txbhD
t
7(d1) ( ) ( ) 0121
4
1
11109 ≠+−+�
=
−DtjxDede
n
tDxc
n
tD n under the
constraints ,0371 =≠ DDD ( ) 08121 ≠+−+ DtjxDhD
and ( ) 812),( DtjxDtxb +−=

51
Table 3. Continued.
Case ),( txh iu
7(d2) ( ) ( ) 01311291110 ≠+−+−
DtjxDeDtDxD
under constraints
,07361 ==≠ DDDD ( ) 08121 ≠+−+ DtjxDhD
and ( ) 812),( DtjxDtxb +−=
7(d3i) constant under the constraints
081321 =+==≠ DhDDDD and 8),( Dtxb =
7(d3ii) ( ) 1019 DtjxD +− under the constraints ,031 =≠ DD
,176 jDD = ( ) 08121 =+−+ DtjxDhD
and ( ) 812),( DtjxDtxb +−=
7(e) ( ) 91211110 ln)( DtDDtjxDuy +++−+ under the
constraints 013 =≠ DD and ( ) 812),( DtjxDtxb +−=
( ) 0111
4/1
9 ≠+−+−
DtjxDt
7(f1) ( ) ( ) ( )2
9119102191 tDxDtDxDeddtDxc −+−++ −
( ) 2
141312 tDtDxD +++ under the constraints
,0317 ==≠ DDD 176 jDD ≠ and
( ) ,),( 812 DtjxDtxb +−=
( ) ( )[ ]tDtjxDtjxdn
n
n 13112
5
0
1 +−+−�=
under the
constraints ,0317 ==≠ DDD 176 jDD = and
( ) 812),( DtjxDtxb +−=
7(f2) ( ) ( ) 11110
2
19 DtjxDtjxD +−+− under the constraints
07316 ===≠ DDDD and ( ) 812),( DtjxDtxb +−=
8(a1) [ ] 0),()(
18
7
≠+ utKuyeD
tD under the constraints
[ ] 0),(17 ≠+ txbhDD with
),( txb an arbitrary solution of equation (2.87)
tDx 10−
8(a2) [ ] 0),()(
18
6
≠+ txKtyeD
xD under the constraints
[ ] 0),( 716 =≠+ DtxbhDD with
),( txb satisfying equation (2.87)
t
8(b1) ( ) ( ) 0121
4
1
11109 ≠+−+�
=
−DtjxDede
n
tDxc
n
tD n under the
constraints ,071 ≠DD ( ) 08121 ≠+−+ DtjxDhD
and ( ) 812),( DtjxDtxb +−=
8(b2) ( ) ( ) 01311291110 ≠+−+−
DtjxDeDtDxD
under constraints
,0761 =≠ DDD ( ) 08121 ≠+−+ DtjxDhD and
( ) 812),( DtjxDtxb +−=

52
Table 3. Continued.
Case ),( txh iu
8(b3i) constant under the constraints 08121 =+=≠ DhDDD and 8),( Dtxb =
8(b3ii) ( ) 1019 DtjxD +− under the constraints ,01761 =−≠ jDDD
( ) 08121 =+−+ DtjxDhD and ( ) 812),( DtjxDtxb +−=
8(c1) ( ) ( ) ( ) ( ) 2
141312
2
911910
4
2
19 tDtDxDtDxDtDxDedd
n
tDxc
nn +++−+−++�
=
−
under the constraints ,0117 =≠ DgD 176 jDD ≠ and
( ) ,),( 812 DtjxDtxb +−=
( ) ( ) ( ) ( )[ ]tDtjxDedtjxdn
tjxD
n
n
n
n
n
13112
6
5
14
1
1
1115 +−++− ��
=
−−
=
− under the
constraints ,0117 =≠ DgD 176 jDD = and ( ) 812),( DtjxDtxb +−=
8(c2) ( ) ( ) 1211110
2
19 DtDtjxDtjxD ++−+− under the constraints
0716 ==≠ DDD and ( ) 812),( DtjxDtxb +−=
Table 4. All rows show the defining ODEs for the functions iy within the functional
forms of ),( txh in connection with groups (I)-(VIII) in table 3. For case 4(3ii), .zyi =
For case 7(b1), ., 21 yyyi = In all other cases, .yyi = Cases 2, 3(1) and 7(c1) refer to
group (II), group (III) case (1) and group (VII) case (c) subcase (1) respectively. Other
similarly-named cases in this table use the same denotation pattern.
Case ( ) 0,,,,)4(
=′′′′′′iiiii yyyyyA
1(1) ( ) ( ) ( ) ( )[ ]2)4( )()()()()()()()()( uyuyguyuyguyuyuyfuyuyf ′′−′′−′′′′′+
( )[ ] 0)()( 11 =′−+ uyDuyj with ( ) 0)( ≠uyf
2 ( ) ( ) ,0)(
4
1)()()()()( )4( =′−′′′′′+ uyuuyuyuyfuyuyf ,11Dt >
( ) ( ) ,0)(4
1)()()()()( )4( =′+′′′′′+ uyuuyuyuyfuyuyf ;11Dt <
with ( ) 0)( ≠uyf
3(1) [ ]{ }2
0
)(2
120
)4( )()()()(3)( 0 uyguyeDuyuyguyuyg ′+′′+′′′′+ −
,0)(1
)()(3
1514
1
13
)(3 00 =+′��
���
�+−+ −− uyguyg
eDuyDuf
uyDe ,11Dt >
[ ]{ }2
0
)(2
120
)4( )()()()(3)( 0 uyguyeDuyuyguyuyg ′+′′+′′′′+ −
,0)(1
)()(3
1514
1
13
)(3 00 =−′��
���
�+−− −− uyguyg
eDuyDuf
uyDe 11Dt <

53
Table 4. Continued. For case 4(3ii), .zyi = In all other cases except 7(b1), .yyi =
Case ( ) 0,,,,)4(
=′′′′′′iiiii yyyyyA
3(2i) 0)()()()()( 17161514
)4( =+′+′+′′+ DuyDuyuyDuyDuy
4(1) [ ]
���
���
′+
+′′+′′′′+210)(
130
)4( )(3
2)()()()( 14 uy
jfuyeDuyuyfuy
uyD
[ ] ,0)()(
18
)(
17
)(
150016 =+′++ −− uyfuyfuyD
eDuyueDeD
,12Dt >
[ ]���
���
′+
+′′+′′′′+210)(
130
)4( )(3
2)()()()( 14 uy
jfuyeDuyuyfuy
uyD
[ ] ,0)()(
18
)(
17
)(
150016 =−′−+ −− uyfuyfuyD
eDuyueDeD 12Dt <
4(2) [ ]{ }2
1121
)4( )()()()()( uyjuyDuyuyjuy ′+′′+′′′′+
[ ] ,0)()(
15
)(
141311 =+′++ −− uyjuyj
eDuyeDD ,11Dt >
[ ]{ }2
1121
)4( )()()()()( uyjuyDuyuyjuy ′+′′+′′′′+
[ ] ,0)()(
15
)(
141311 =−′−+ −− uyjuyj
eDuyeDD 11Dt <
4(3i) [ ]{ }2
1
)(2
121
)4( )(2)()()(4)( 1 uyjuyeDuyuyjuyuyj ′+′′+′′′′+ −
[ ] 0)()(4
15
)(4
14
)(3
13111 =+′++ −−− uyjuyjuyj
eDuyueDeD
4(3ii) [ ] [ ] [ ] ,0)(2)()()( 5
1
3
1
2
0 =+−+′ tzftzgtzjtz ,0112 >+− Dtjx
[ ] [ ] [ ] ,0)(2)()()( 5
1
3
1
2
0 =+−−′ tzftzgtzjtz 0112 <+− Dtjx
5(1) [ ] [ ]
���
��� ′
+′′+′′′′
+−
)(
)()()(
)(
)()(3)(
2
0
2
140
)4( 0
uy
uyguyuyD
uy
uyuyguy
g
[ ] [ ] ,0)(1
)()(ln)(1
0
10
3
1
0 =���
���
+′−++−
uyg
uyujuyjuyf
g ,13Dt >
[ ] [ ]
���
��� ′
+′′+′′′′
+−
)(
)()()(
)(
)()(3)(
2
0
2
140
)4( 0
uy
uyguyuyD
uy
uyuyguy
g
[ ] [ ] ,0)(1
)()(ln)(1
0
10
3
1
0 =���
���
+′−+−−
uyg
uyujuyjuyf
g 13Dt <
5(2i) [ ] 0)()()(ln)()( 16151413
)4( =+′++′′+ uyDuyDuyDuyDuy
5(2ii)
( )0)()(ln)(
3
601
14
601
1310
601
1 =���
�
���
�
++
+++
++′ ty
DtjD
D
DtjD
Djtyj
DtjD
Dty
6(1) [ ] [ ]
���
��� ′+
+′′+′′′′
+)(
)(
3
2)()(
)(
)()()(
2
10170
)4( 18
uy
uyjfuyuyD
uy
uyuyfuy
D
[ ] [ ]{ } [ ] ,0)()()()( 0020 1
222119 =+′++ −− ffDuyDuyuyuDuyD ,16Dt >
[ ] [ ]
���
��� ′+
+′′+′′′′
+)(
)(
3
2)()(
)(
)()()(
2
10170
)4( 18
uy
uyjfuyuyD
uy
uyuyfuy
D
[ ] [ ]{ } [ ] ,0)()()()( 0020 1
222119 =−′−+ −− ffDuyDuyuyuDuyD 16Dt <

54
Table 4. Continued. For case 7(b1), ., 21 yyyi = In all other cases except 4(3ii), .yyi =
Case ( ) 0,,,,)4(
=′′′′′′iiiii yyyyyA
6(2) [ ]
���
��� ′
+′′+′′′′
+)(
)()(
)(
)()()(
2
1171
)4(
uy
uyjuyD
uy
uyuyjuy [ ]{ } )()( 1
1819 uyuyDDj ′++
−
[ ] ,0)( 11
20 =+ − juyD ,16Dt >
[ ]
���
��� ′
+′′+′′′′
+)(
)()(
)(
)()()(
2
1171
)4(
uy
uyjuyD
uy
uyuyjuy [ ]{ } )()( 1
1819 uyuyDDj ′−+
−
[ ] ,0)( 11
20 =− − juyD 16Dt <
6(3i) [ ] [ ]
���
��� ′
+′′+′′′′
+−
)(
)(2)()(
)(
)()(4)(
2
1
2
161
)4( 1
uy
uyjuyuyD
uy
uyuyjuy
j
[ ] [ ]{ } )()()( 11 4
18
3
17 uyuyuDuyDjj ′++
−− [ ] 0)( 141
19 =+ − juyD
6(3ii) [ ] [ ] [ ] ,0)()()(
)(
)(111 4
19
2
1817 =+++′ jjj
tyDtyDtyDty
ty ,0162 >+− Dtjx
[ ] [ ] [ ] ,0)()()()(
)(111 4
19
2
1817 =++−′ jjj
tyDtyDtyDty
ty 0162 <+− Dtjx
7(a) ,0),(),()()(
4
1)( 989
)4(
1
9 =++++′−−
utKDtxbDtuyDuyuuyfD
,8Dt −>
,0),(),()()(4
1)( 989
)4(
1
9 =−+−−′+−
utKDtxbDtuyDuyuuyfD
8Dt −<
7(b1) ,0)()(
4
1)( 1101
)4(
11 =+′− uyDuyuuyf ,0)(4
1)(
4
1)( 1522
)4(
21 =++′− uDuyuyuuyf
for all ,9Dt −>
,0)()(4
1)( 1101
)4(
11 =−′+ uyDuyuuyf ,0)(4
1)(
4
1)( 1522
)4(
21 =−−′+ uDuyuyuuyf
for all 9Dt −<
7(c1) 0),(),()()()( 889
)4(
18 =+++′+ −
utKDetxbuyDuyDuyftD
7(c2) [ ] [ ] 0),(),()()( 88
912111019 =+++++++′ �−−
x
c
D
t
xD
xxxxxx detbDbetxbDbDbDbftyDty ωω ω
7(e) ,0)(
4
1)( 12
)4(
1 =+′− Duyuuyf ,9Dt −>
,0)(4
1)( 12
)4(
1 =−′+ Duyuuyf 9Dt −<
8(a1) 0),(),()()()()( 8891
)4(
18 =+++′+′′− −
utKDetxbuyDuyDuyguyftD
8(a2) [ ] [ ] 0),(),()()( 88
912111019 =+++++++′ �−−
x
c
D
t
xD
xxxxxx detbDbetxbDbDbDbftyDty ωω ω

55
2.4 CONCLUDING REMARKS
We applied Lie classical analysis to the thin film equation (2.1), obtaining eight Lie
classical symmetry groups, namely groups (I)-(VIII).
In association with groups (I)-(VIII), we derived similarity solutions for the thin film
equation (2.1). We recovered several of these solutions via Mathematica [54]. All
physically relevant solutions of the thin film equation (2.1) are space-dependent as the
thin film equation (2.1) reduces solutions independent of x to constant solutions.
Sums of travelling waves with differing velocities and combinations of travelling waves
and polynomials involving space and time variables are among the similarity solutions
occurring for the thin film equation (2.1) in connection with groups (I)-(VIII) and their
accompanying conditions.
In the following chapter we study the thin film equation (2.1) using the non-classical
symmetry method of Bluman and Cole [16]. This non-classical procedure enables us to
determine if the thin film equation (2.1) admits non-classical symmetries arising beyond
its classical symmetries obtained in this chapter. In chapter 4 of this thesis, we consider
the thin film equation (2.1) from the perspective of the method of classical symmetry-
enhancing constraints introduced and developed by Goard and Broadbridge [29]. This
allows us to ascertain the existence of classical symmetries extending beyond the
confines of those retrievable by Lie classical analysis for the thin film equation (2.1).

56
CHAPTER 3
NON-CLASSICAL SYMMETRIES FOR THE
THIN FILM EQUATION
3.1 INTRODUCTION
By the non-classical procedure, we deduce the non-classical symmetry groups for the
thin film equation (2.1) given by
[ ] ;0)()()( =++−∂
∂txxxxx hhhjhhghhf
x (3.1)
where .0)( ≠hf The thin film equations (3.1) and (2.1) are identical.
We consider the one-parameter )(ε Lie group of general infinitesimal transformations in
,x t and ,h namely
( ) ( )( ) ( )( ) ( );,,
,,,
,,,
2
1
2
1
2
1
εεζ
εεη
εεξ
Ohtxhh
Ohtxtt
Ohtxxx
++=
++=
++=
(3.2)
preserving the thin film equation (3.1).
Hence if ),,( txh φ= then from ),,( 111 txh φ= evaluating the expansion of ε∂
∂ 1h at 0=ε
gives the invariant surface condition
).,,(),,(),,( htxt
hhtx
x
hhtx ζηξ =
∂
∂+
∂
∂ (3.3)
Solutions of the invariant surface condition (3.3) are functional forms of similarity
solutions for the thin film equation (3.1).
The following section contains a brief description of the non-classical method. This
technique enables recovery of the non-classical symmetry groups leaving the thin film
equation (3.1) invariant. The non-classical method generalises the Lie classical
procedure and includes the classical groups as special cases. The non-classical approach
is outlined in Bluman and Cole [16] and Hill [36].

57
3.2 THE NON-CLASSICAL PROCEDURE
Commencing the non-classical method, we introduce for transformations (3.2) the terms
),,( htxA and ),,( htxB defined as
,),,(
),,(),,(
htx
htxhtxA
η
ζ= ;
),,(
),,(),,(
htx
htxhtxB
η
ξ= (3.4)
so that the invariant surface condition (3.3) becomes
.x
hBA
t
h
∂
∂−=
∂
∂ (3.5)
To obtain non-trivial transformations, we require .0),,( ≠htxη
The non-classical method uses equation (3.5) to express all derivatives of h with respect
to t in terms of derivatives of h with respect to .x In the invariance requirement derived
for the thin film equation (3.1) via the Lie classical procedure in chapter 2 of this thesis,
these new expressions then replace all derivatives of h with respect to t so that the left-
hand side of the invariance requirement depends on h only via h itself and derivatives
of h with respect to .x
As we express all derivatives of h with respect to t in terms of derivatives of h with
respect to ,x fewer derivatives of h occur in the resulting invariance requirement than is
the case for the classical method. Hence, fewer restrictions apply to the non-classical
group generators ),,( htxA and ),,( htxB than to the classical group generators
),,,( htxξ ),,( htxη and ),,( htxζ when equating to zero the coefficients of all the
derivatives of h and the sum of all remaining terms not involving derivatives of h in the
invariance requirement. This enables the non-classical procedure to generalise the
classical method. Following the replacements mentioned, setting to zero the coefficients
of all derivatives of h and the sum of all remaining terms not involving derivatives of h
in the invariance requirement of thin film equation (3.1) yields the determining equations

58
,0=hhA ,0=hB ,0)(
)(=�
�
���
� ′A
hf
hf
dh
d ( ) ,0)( =−′
xxxh BAhf
,0)(
)(4)()()( 2 =
′−+++− A
hf
hfABAAhjAhgAhf xtxxxxxxx
,0)(
)(
)(
)(246 =�
�
���
�−−−
hf
hg
dh
dAB
hf
hgBA xxxxxxh ,0
)(
)(64 =
′+− xxxxh A
hf
hfBA
( ) ( ) ,0)(
)(2
)(
)(3
)(
)(=�
�
���
� ′−+
′−−
′
hf
hg
dh
dABA
hf
hgBA
hf
hfxhxxxxxh (3.6)
[ ] ( ) ( ))(
)(4)(2)(4)(3
hf
hfABBAhfABhgBBBhj xxxxxxxhxhxxtx
′+−+−+−−
Ahf
hj
dh
dhf �
�
���
�+
)(
)()( .0)(2)( =′−′+ xxxx AhgAhf
All subscripts in system (3.6) denote partial differentiation with ,x t and h as
independent variables. Throughout this chapter, primes represent differentiation with
respect to the argument indicated.
System (3.6) enables retrieval of all the non-classical symmetries and corresponding
conditions on ,0)( ≠hf )(hg and )(hj for the thin film equation (3.1) under
transformations (3.2) via the non-classical procedure.
The following pages feature a description of the nine non-classical groups (I) – (IX)
arising for the thin film equation (3.1). Where applicable, a listing of the special cases
occurring for each of groups (I) – (IX) follows. Finally, we present any new similarity
solutions for the thin film equation (3.1) in association with each of these groups.
GROUP (I)
Under the conditions ,0)( ≠hf )(hg and )(hj are arbitrary functions of ,h the thin
film equation (3.1) admits non-classical group (I), namely
,0),,( =htxA ;),,( 4chtxB = (3.7)
where 4c is an arbitrary constant.

59
Similarity Solutions
Group (3.7), the invariant surface condition (3.5) and the thin film equation (3.1) imply
,04 =+ xt hch [ ] ;0)()()( =++−∂
∂txxxxx hhhjhhghhf
x (3.8)
where 4c is an arbitrary constant while ,0)( ≠hf )(hg and )(hj are arbitrary functions
of .h
System (3.8) is a special case of system (2.20) with .17 =D It follows that under
transformations (3.2) and with ,0)( ≠hf )(hg and )(hj arbitrary functions of ,h the
similarity solution of the thin film equation (3.1) in association with group (3.7) is a
special case of results (2.21)-(2.22) with .17 =D
GROUP (II)
Subject to the conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 10 jhjhj += the thin film
equation (3.1) yields non-classical group (II), namely
,0),,( 2 ≠= chtxA ;),,( 402 ctjchtxB += (3.9)
where ,02 ≠c ,01 ≠f ,4c ,1g 0j and 1j are arbitrary constants.
Similarity Solutions
Group (3.9), the invariant surface condition (3.5) and the thin film equation (3.1) give
( ) ,02402 ≠=++ chctjch xt ( ) ;01011 =+++− txxxxxxx hhjhjhghf (3.10)
where ,02 ≠c ,01 ≠f ,4c ,1g 0j and 1j are arbitrary constants. As 0=xh forces
0=th in equation (3.10)2 , rendering equation (3.10)1 inconsistent, we require .0≠xh
Equations (3.10) are a special case of equations (2.28) with 00 =g and .17 =D Hence
under transformations (3.2) and the conditions ,0)( 1 ≠= fhf 1)( ghg = and
,)( 10 jhjhj += the similarity solution of the thin film equation (3.1) in tandem with
group (3.9) is a special case of results (2.31)-(2.32) with .17 =D

60
By the Mathematica program [54], we solve the case 00 =j of the relations obtained
here; (which corresponds to results (2.31)-(2.32) with 00 =j and 17 =D ). These
solutions are
( ) ( ) ,0),( 1110
9
7
54 ≠+−+=�
=
−− dtjxcedtxh
n
tcxc
nn ,05 ≠c
( ) ( ) ( ) ,0),( 162
2
412
4
3
1 411 ≠+++−+=�=
−−dtdxdtcxcedtxh
n
tcxc
n
n
,051 =≠ cg (3.11)
( ) ,0),( 2
5
1
1
4 ≠+−=�=
−tctcxdtxh
n
n
n .051 == cg
In solutions (3.11), ,02 ≠c ,014
210 ≠
−=
jc
cc ,0
1
111 ≠=
f
gc ,0
2 1
212 ≠=
g
cc ,01 ≠f
,024 1
25 ≠−=
f
cd ,4c ,415 cjc −= ,7c ,8c ,9c ,nd 1g and 1j are arbitrary constants for
all { }.6,4,3,2,1∈n
Furthermore, ( )
,010
9
7
54 ≠+�
=
−− cedc
n
tcxc
nnn ( ) ( ) 01
5
1
2
4 ≠−−�=
−
n
n
n tcxdn and
( ) ( ) ( ) 02)1( 2412
4
3
1
11411 ≠+−+−�
=
−−dtcxcedc
n
tcxc
n
nn
owing to the requirement .0≠xh
GROUP (III)
Under the conditions ,0)( 1 ≠= fhf 1)( ghg = and ,ln)( 210 jjhjhj ++= the thin
film equation (3.1) admits non-classical group (III), namely
( ) ,0),,( 11 ≠+= jhchtxA ;),,( 401 ctjchtxB += (3.12)
where ,01 ≠c ,01 ≠f ,4c ,1g ,0j 1j and 2j are arbitrary constants while .01 ≠+ jh
Similarity Solutions
Group (3.12), the invariant surface condition (3.5) and the thin film equation (3.1) yield
( ) ( ) ,011401 ≠+=++ jhchctjch xt ( ) ;0ln 21011 =++++− txxxxxxx hhjjhjhghf
(3.13)
where ,01 ≠c ,01 ≠f ,4c ,1g ,0j 1j and 2j are arbitrary constants while .01 ≠+ jh
As 0=xh forces 0=th in equation (3.13)2 , rendering equation (3.13)1 inconsistent,
0≠xh is a requirement.

61
System (3.13) is a special case of system (2.45) with 00 =g and .17 =D Therefore
under transformations (3.2) and the conditions ,0)( 1 ≠= fhf 1)( ghg = and
,ln)( 210 jjhjhj ++= the similarity solution of thin film equation (3.1) in connection
with group (3.12) is a special case of relations (2.48)-(2.49) with .17 =D
Via the Mathematica program [54], we solve the case 00 =j of the relations obtained
here; (which corresponds to results (2.48)-(2.49) with 00 =j and 17 =D ). The solution
arising is
( )
;0),( 1
10
7
641 ≠−= �
=
−− jedetxh
n
tcxc
n
tc n (3.14)
where ,01 ≠c ,4c ,7c ,8c ,9c ,10c ,1d ,2d ,3d 4d and 1j are arbitrary constants.
Furthermore, ( )
010
7
64 ≠�
=
−−
n
tcxc
nnnedc owing to the requirement .0≠xh
GROUP (IV)
Subject to the conditions ,0)( 0
1 ≠= hfefhf
hjf
eghg 3
2
1
10
)(
+
= and ,)( 201 jejhjhj += the
thin film equation (3.1) yields the non-classical group (IV), namely
,0
3
4
1),,(
210
≠
+−
=
ctjf
htxA ;
3
43),,(
210
52110
ctjf
ctjjxjf
htxB
+−
+−−
= (3.15)
where ,01 ≠f ,01 ≠j ,2c ,5c ,0f ,1g 0j and 2j are arbitrary constants while
.03
42
10 ≠+−
ctjf

62
Similarity Solutions
Group (3.15), the invariant surface condition (3.5) and the thin film equation (3.1) imply
,0
3
4
1
3
43
210
210
52110
≠
+−
=
+−
+−−
+
ctjf
h
ctjf
ctjjxjf
h xt
(3.16)
( ) ( ) ( ) ;03
220
2103
2
1011
10
0 =+++��
���
� ++−+
+
tx
hj
xxx
hjf
xxxxxxxx
hfhhjejh
jfheghhfhef
where ,01 ≠f ,01 ≠j ,2c ,5c ,0f ,1g 0j and 2j are arbitrary constants while
.03
42
10 ≠+−
ctjf
As 0=xh gives 0=th in equation (3.16)2 , causing equation (3.16)1
to be inconsistent, 0≠xh is a requirement.
System (3.16) is a special case of system (2.35) with 12 =D and .03
47
10 ≠+−
Dtjf
We examine the cases
(1) ,04 10 ≠= jf ,02 ≠c (2) ,010 ≠= jf (3) ( )( ) .04 1010 ≠−− jfjf
Case (1) ,04 10 ≠= jf 02 ≠c
Under the constraints 04 10 ≠= jf and ,02 ≠c system (3.16) is a special case of system
(2.35) with ,12 =D 07 ≠D and .04 10 ≠= jf Hence under transformations (3.2) and
the conditions ,0)( 14
1 ≠= hjefhf hj
eghg 12
1)( = and ,)( 201 jejhjhj += the similarity
solution of the thin film equation (3.1) in tandem with group (3.15) and constraints
04 10 ≠= jf and 02 ≠c is a special case of results (2.40)-(2.41) with .12 =D
Case (2) 010 ≠= jf
Subject to the constraint ,010 ≠= jf system (3.16) is a special case of system (2.35)
with ,12 =D 010 ≠= jf and .071 ≠+− Dtj Thus under transformations (3.2) and the
conditions ,0)( 1
1 ≠= hjefhf hj
eghg 1
1)( = and ,)( 201 jejhjhj += the similarity
solution of thin film equation (3.1) in association with group (3.15) and the constraint
010 ≠= jf is a special case of relations (2.38)-(2.39) with .12 =D

63
Case (3) ( )( ) 04 1010 ≠−− jfjf
Under the constraints ( )( ) ,04 1010 ≠−− jfjf system (3.16) is a special case of system
(2.35) with ,12 =D ( )( ) 04 1010 ≠−− jfjf and .03
47
10 ≠+−
Dtjf
Therefore under
transformations (3.2) and the conditions ,0)( 0
1 ≠= hfefhf
hjf
eghg 3
2
1
10
)(
+
= and
,)( 201 jejhjhj += the similarity solution of the thin film equation (3.1) in connection
with group (3.15) and constraints ( )( ) 04 1010 ≠−− jfjf is a special case of relations
(2.36)-(2.37) with .12 =D
GROUP (V)
Under the conditions ,0)( 03
1 ≠= hgefhf
hgeghg 0
1)( = and ,)( 20 jhjhj += the thin
film equation (3.1) admits non-classical group (V), namely
,01
),,(20
≠+
=ctg
htxA ;),,(20
500
ctg
ctjxghtxB
+
++= (3.17)
where ,01 ≠f ,2c ,5c ,0g ,1g 0j and 2j are arbitrary constants with .020 ≠+ ctg
Similarity Solutions
Group (3.17), the invariant surface condition (3.5) and the thin film equation (3.1) give
,01
2020
500 ≠+
=+
+++
ctgh
ctg
ctjxgh xt
(3.18)
( ) ( )[ ] ( ) ;03 20
2
010
3
100 =++++−+ txxxx
hg
xxxxxxxx
hghhjhjhgheghhghef
where ,01 ≠f ,2c ,5c ,0g ,1g 0j and 2j are arbitrary constants with .020 ≠+ ctg As
0=xh forces 0=th in equation (3.18)2 , rendering equation (3.18)1 inconsistent, we
require .0≠xh
System (3.18) is a special case of system (2.28) with 12 =D and .070 ≠+ Dtg
We study the cases
(1) ,00 ≠g (2) ≠2c .00 =g

64
Case (1) 00 ≠g
Under the constraint ,00 ≠g system (3.18) is a special case of system (2.28) with
,12 =D 00 ≠g and .070 ≠+ Dtg Hence under transformations (3.2) and the conditions
,0)( 03
1 ≠= hgefhf
hgeghg 0
1)( = and ,)( 20 jhjhj += the similarity solution of the thin
film equation (3.1) in association with group (3.17) and the constraint 00 ≠g is a special
case of relations (2.29)-(2.30) with .12 =D
Case (2) ≠2c 00 =g
Subject to the constraints ≠2c ,00 =g system (3.18) is equivalent to system (3.10).
Hence this case is identical to that of group (II) in this chapter.
GROUP (VI)
Subject to the conditions ( ) ,0)( 0
21 ≠+=f
fhfhf ( ) 3
2
21
10
)(jf
fhghg+
+= and
( ) ,)( 2201 jfhjhjj
++= the thin film equation (3.1) admits the non-classical group (VI),
namely
,0
3
4),,(
2
10
2 ≠
+−
+=
ctjf
fhhtxA ;
3
43),,(
2
10
521
10
ctjf
ctjjxjf
htxB
+−
+−−
= (3.19)
where ,01 ≠f ,01 ≠j ,2c ,5c ,0f ,2f ,1g 0j and 2j are arbitrary constants such that
03
42
10 ≠+−
ctjf
while .02 ≠+ fh

65
Similarity Solutions
Group (3.19), the invariant surface condition (3.5) and the thin film equation (3.1) give
,0
3
4
3
43
2
10
2
2
10
521
10
≠
+−
+=
+−
+−−
+
ctjf
fhh
ctjf
ctjjxjf
h xt
(3.20)
( ) ( )( )
( ) ��
���
�
+
+++−��
���
+++
+
2
2
10
21
2
0
213
23
120
0
xxxxxxxxxxx
fh
fh
jfhfhghh
fh
fhfhf
jf
th+ ( )[ ] ;02201 =+++ x
jhjfhj
where ,01 ≠f ,01 ≠j ,2c ,5c ,0f ,2f ,1g 0j and 2j are arbitrary constants such that
03
42
10 ≠+−
ctjf
while .02 ≠+ fh As 0=xh gives 0=th in equation (3.20)2 ,
rendering equation (3.20)1 inconsistent, 0≠xh is a requirement.
System (3.20) is a special case of system (2.53) with ( ) .043
7101 ≠+− Dtjf
D
We examine the cases
(1) ,02 ≠c ,04 10 ≠= jf (2) ,010 ≠= jf (3) ( )( ) .04 1010 ≠−− jfjf
Case (1) ,02 ≠c 04 10 ≠= jf
Under constraints 02 ≠c and ,04 10 ≠= jf system (3.20) is a special case of system
(2.53) with 07 ≠D and .04 10 ≠= jf This case accordingly corresponds to case (3)
subcase (i) for group (VI) in chapter 2. Hence under transformations (3.2) and conditions
( ) ,0)( 14
21 ≠+=j
fhfhf ( ) 12
21)(j
fhghg += and ( ) ,)( 2201 jfhjhjj
++= the
similarity solution of the thin film equation (3.1) in tandem with group (3.19) and the
constraints 02 ≠c and 04 10 ≠= jf is equivalent to results (2.58)-(2.59).

66
Case (2) 010 ≠= jf
Under the constraint ,010 ≠= jf system (3.20) is a special case of system (2.53) with
010 ≠= jf and .0711 ≠+− DtjD This case thus corresponds to case (2) of group (VI)
in chapter 2. Therefore under transformations (3.2) and the conditions
( ) ,0)( 1
21 ≠+=j
fhfhf ( ) 1
21)(j
fhghg += and ( ) ,)( 2201 jfhjhjj
++= the similarity
solution of thin film equation (3.1) in association with group (3.19) and the constraint
010 ≠= jf is equivalent to relations (2.56)-(2.57).
Case (3) ( )( ) 04 1010 ≠−− jfjf
Under the constraints ( )( ) ,04 1010 ≠−− jfjf system (3.20) is a special case of system
(2.53) with ( )( ) 04 1010 ≠−− jfjf and ( ) .043
7101 ≠+− Dtjf
D Hence this case is
equivalent to case (1) of group (VI) in chapter 2. Hence under transformations (3.2) and
conditions ( ) ,0)( 0
21 ≠+=f
fhfhf ( ) 3
2
21
10
)(jf
fhghg+
+= and ( ) ,)( 2201 jfhjhjj
++=
the similarity solution of the thin film equation (3.1) in connection with group (3.19) and
the constraints ( )( ) 04 1010 ≠−− jfjf is equivalent to results (2.54)-(2.55).
GROUP (VII)
Under the conditions ( ) ,0)( 03
21 ≠+=g
fhfhf ( ) 0
21)(g
fhghg += and
,ln)( 220 jfhjhj ++= the thin film equation (3.1) yields non-classical group (VII),
namely
,0),,(20
2 ≠+
+=
ctg
fhhtxA ;),,(
20
500
ctg
ctjxghtxB
+
++= (3.21)
where ,01 ≠f ,2c ,5c ,2f ,0g ,1g 0j and 2j are arbitrary constants such that
020 ≠+ ctg while .02 ≠+ fh

67
Similarity Solutions
Group (3.21), the invariant surface condition (3.5) and the thin film equation (3.1) imply
,020
2
20
500 ≠+
+=
+
+++
ctg
fhh
ctg
ctjxgh xt
(3.22)
( ) ( ) ( )txxx
g
xxxxxxxx
ghh
fh
ghfhghh
fh
ghfhf +�
�
���
�
+++−��
���
+++
2
2
0
21
2
03
2100
3
( ) ;0ln 220 =+++ xhjfhj
where ,01 ≠f ,2c ,5c ,2f ,0g ,1g 0j and 2j are arbitrary constants with 020 ≠+ ctg
and .02 ≠+ fh As 0=xh forces 0=th in equation (3.22)2 , rendering equation (3.22)1
inconsistent, we require .0≠xh
System (3.22) is a special case of system (2.45) with .0701 ≠+ DtgD
We consider the cases (1) ,00 ≠g (2) ≠2c .00 =g
Case (1) 00 ≠g
Under the constraint ,00 ≠g system (3.22) is a special case of system (2.45) with
00 ≠g and .0701 ≠+ DtgD This case therefore corresponds to case (1) of group (V) in
chapter 2. Hence under transformations (3.2) and the conditions
( ) ,0)( 03
21 ≠+=g
fhfhf ( ) 0
21)(g
fhghg += and ,ln)( 220 jfhjhj ++= the similarity
solution of the thin film equation (3.1) in relation to group (3.21) and the constraint
00 ≠g is equivalent to results (2.46)-(2.47).
Case (2) ≠2c 00 =g
Under constraints ≠2c ,00 =g system (3.22) is equivalent to system (3.13).
Accordingly, this case is identical to that of group (III) in this chapter.

68
GROUP (VIII)
Under conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = the thin film equation (3.1)
admits the non-classical group (VIII), namely
),,(),,( 1 txbhchtxA += ;),,( 2chtxB = (3.23)
such that
;0111 =++− txxxxxxx bbjbgbf (3.24)
where ,01 ≠f ,1c ,2c 1g and 1j are arbitrary constants.
As equations (3.24) and (2.87) are identical, equation (3.24) also admits the travelling
wave (2.88) of velocity .1j
Special cases of group (3.23) emerge and are as follows.
Case (1) The case of group (3.23) with ( ) ( )
8437565),( cecectxbtcxctcxc ++= −−−
and
01 =c occurs under conditions identical to those on group (3.23) where ,05 ≠c ,01 ≠f
,3c ,4c ,15
3
5116 gccfjc −+= ,15
3
5117 gccfjc +−= ,8c 1g and 1j are arbitrary
constants such that ( ) ( )
.07565
43 ≠− −−− tcxctcxcecec
Case (2) The case of group (3.23) with 0≠xb arises under conditions identical to
those on group (3.23).
Similarity Solutions
Group (3.23), the invariant surface condition (3.5) and the thin film equation (3.1) give
),,(12 txbhchch xt +=+ ;0111 =++− txxxxxxx hhjhghf (3.25)
where ,01 ≠f ,1c ,2c 1g and 1j are arbitrary constants while ),( txb satisfies equation
(3.24). As 0=xh gives 0=th in equation (3.25)2 , forcing =),( txh constant, we
require 0≠xh for system (3.25) to generate nonconstant solutions.
We derive similarity solutions of the thin film equation (3.1) for the cases
(a) ),( txb is an arbitrary solution of equation (3.24),
(b) ,01 ≠c ,)(),( 413 ctjxctxb +−=
(c) ,01 =c .)(),( 413 ctjxctxb +−=

69
Similarity Solutions for Case (a)
As equations (3.24) and (2.87) are identical defining equations for ),,( txb system (3.25)
is a special case of system (2.89) with .17 =D Hence under transformations (3.2) and
the conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = the similarity solutions of thin
film equation (3.1) in relation to group (3.23) for case (a) are the solutions arising for
subcases (1) and (3) of group (VIII) case (a) with 17 =D in chapter 2.
Similarity Solutions for Case (b)
Under constraints 01 ≠c and ,)(),( 413 ctjxctxb +−= system (3.25) is a special case of
system (2.94) with .17 =D Hence under transformations (3.2) and the conditions
,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = the similarity solutions of thin film equation
(3.1) in tandem with group (3.23) for case (b) are the constant solution and the special
cases of solutions (2.95) and (2.97) with .17 =D
Similarity Solutions for Case (c)
Under constraints 01 =c and ,)(),( 413 ctjxctxb +−= system (3.25) is a special case of
system (2.98) with .17 =D Therefore under transformations (3.2) and the conditions
,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = the similarity solutions of thin film equation
(3.1) in connection with group (3.23) for case (c) are the special cases of solutions (2.99)
and (2.84) with .17 =D
GROUP (IX)
Under conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the thin film equation (3.1)
admits the non-classical group (IX), namely
),,(4
),,(2
1 txbhct
chtxA +
+= ;0
4
3),,(
2
31 ≠+
++=
ct
ctjxhtxB (3.26)
such that
;0),(4
4
2
11 =+
+++ txbct
bbjbf txxxxx (3.27)
where ,01 ≠f ,1c ,2c 3c and 1j are arbitrary constants while 03 31 ≠++ ctjx and
.04 2 ≠+ ct

70
Equation (3.27) (whose only constant solution is the trivial one) admits the solution
;4
),(2
7465
ct
cectxb
tcxc
+
+=
+
(3.28)
where ,05 ≠c ,01 ≠f ,2c ,4c ( ),3
51156 cfjcc +−= 7c and 1j are arbitrary constants
while .04 2 ≠+ ct
Special cases of group (3.26) arise and are as follows.
Case (1) The case of group (3.26) with 0),( 1 == ctxb occurs under the conditions
0)( ≠hf is an arbitrary function, 0)( =hg and 1)( jhj = where 1j is an arbitrary
constant.
Case (2) The case of group (3.26) with ( )
04
2),(
20
≠+
−=ctg
txb arises under the
conditions ,0)( 1 ≠= fhf hg
eghg 0
1)( = and 22
3
0
0
)( jejhjhg
+= where ,01 ≠f ,00 ≠g
,2c ,1g 0j and 2j are arbitrary constants and .04 2 ≠+ ct
Case (3) The case of group (3.26) with ( )20
2
4
2),(
ctg
gtxb
+−= emerges under
conditions ,0)( 1 ≠= fhf ( ) 0
21)(g
ghghg += and ( ) 22
3
200)( jghjhj
g++= where
,01 ≠f ,00 ≠g ,2c ,1g ,2g 0j and 2j are arbitrary constants while
( )( ) .04 22 ≠++ ghct
Case (4) The case of group (3.26) with ( )
2
615
4),(
ct
ctjxctxb
+
+−= occurs under
conditions identical to those on group (3.26) where ,2c ,5c 6c and 1j are arbitrary
constants while .04 2 ≠+ ct
Case (5) The case of group (3.26) with
( )[ ] ( )[ ]
2
1065
4),(
37117
37117
ct
cecectxb
tcfjxctcfjxc
+
++=
−−−+−
and 01 =c arises under conditions
identical to those on group (3.26) where ,07 ≠c ,01 ≠f ,2c ,5c ,6c 10c and 1j are
arbitrary constants such that ( )[ ] ( )[ ]
03
71173
7117
65 ≠− −−−+− tcfjxctcfjxcecec and .04 2 ≠+ ct
Case (6) The case of group (3.26) with 0≠xb occurs under conditions identical to
those on group (3.26).

71
Similarity Solutions
Group (3.26), the invariant surface condition (3.5) and the thin film equation (3.1) imply
),,(44
3
2
1
2
31 txbhct
ch
ct
ctjxh xt +
+=
+
+++ ;011 =++ txxxxx hhjhf (3.29)
where ,01 ≠f ,1c ,2c 3c and 1j are arbitrary constants, ,03 31 ≠++ ctjx 04 2 ≠+ ct
and ),( txb satisfies equation (3.27). As 0=xh forces 0=th in equation (3.29)2 , giving
=),( txh constant, we require 0≠xh for system (3.29) to admit nonconstant solutions.
We obtain similarity solutions of the thin film equation (3.1) for the cases
(a) ),( txb is an arbitrary solution of equation (3.27),
(b) ,01 ≠c ( )
,4
),(2
615
ct
ctjxctxb
+
+−=
(c) ,01 =c ( )
.4
),(2
615
ct
ctjxctxb
+
+−=
Similarity Solutions for Case (a)
Let ),( txα replace ),( txb in equation (2.63) and the ensuing discussion throughout
group (VII) in chapter 2 of this thesis. Upon letting ( ) ),(4),( 2 txbcttx +=α where this
last-mentioned ),( txb appears in equations (3.26)-(3.27) and (3.29), equations (3.27) and
(2.63) are equivalent. We then find system (3.29) to be a special case of system (2.65)
with 43 =D and ( ) ).,(4),( 2 txbcttx +=α
Hence under transformations (3.2) and conditions ,0)( 1 ≠= fhf 0)( =hg and
,)( 1jhj = the similarity solutions of thin film equation (3.1) in tandem with group (3.26)
for case (a) are the solutions occurring for case (a) of group (VII) with 43 =D and
( ) ),(4),( 2 txbcttx +=α in chapter 2 of this thesis.
Similarity Solutions for Case (b)
Under constraints 01 ≠c and ( )
,4
),(2
615
ct
ctjxctxb
+
+−= system (3.29) is a special case of
system (2.68) with .43 =D Hence under transformations (3.2) and the conditions
,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the similarity solutions of the thin film equation
(3.1) in relation to group (3.26) for case (b) are the constant solution and the special case
of solutions (2.69)-(2.70) with .43 =D

72
Similarity Solutions for Case (c)
Under constraints 01 =c and ( )
,4
),(2
615
ct
ctjxctxb
+
+−= system (3.29) is a special case of
system (2.80) with .43 =D Therefore under transformations (3.2) and the conditions
,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = the similarity solution of thin film equation (3.1)
in connection with group (3.26) for case (c) is the special case of solutions (2.81)-(2.82)
with .43 =D
The infinitesimal generators ,1V ,...,2V 9V represent the algebras for the respective non-
classical symmetry groups (I), (II),…, (IX); (see Gandarias [28]). These generators are as
follows.
A List of Infinitesimal Generators for Groups (I)-(IX)
The generators ,1V ,...,2V 9V for the respective non-classical symmetry groups (I),
(II),…, (IX) are
,41tx
cV∂
∂+
∂
∂=
( ) ,24022h
ctx
ctjcV∂
∂+
∂
∂+
∂
∂+=
( ) ( ) ,114013h
jhctx
ctjcV∂
∂++
∂
∂+
∂
∂+=
,
3
4
1
3
43
2
10
2
10
521
10
4h
ctjftx
ctjf
ctjjxjf
V∂
∂
+−
+∂
∂+
∂
∂
+−
+−−
=
,1
2020
500
5hctgtxctg
ctjxgV
∂
∂
++
∂
∂+
∂
∂
+
++=
,
3
4
3
43
2
10
2
2
10
521
10
6h
ctjf
fh
txct
jf
ctjjxjf
V∂
∂
+−
++
∂
∂+
∂
∂
+−
+−−
=
,20
2
20
500
7hctg
fh
txctg
ctjxgV
∂
∂
+
++
∂
∂+
∂
∂
+
++=
[ ] ,),(128h
txbhctx
cV∂
∂++
∂
∂+
∂
∂=
.),(44
3
2
1
2
31
9h
txbhct
c
txct
ctjxV
∂
∂��
���
�+
++
∂
∂+
∂
∂
+
++=

73
We now present three tables of results. Table 1 lists the functions ),(hf )(hg and )(hj
(distinguishing the non-classical symmetries of the thin film equation (3.1)) with their
associated infinitesimal generators iV for all }.9,...,2,1{∈i Table 2 is a dimensional
classification of the mathematical structure of groups (I)-(IX) and the corresponding iV .
Table 3 displays the similarity solutions ),( txh not featured in chapter 2 for the thin film
equation (3.1) in tandem with groups (I)-(IX).
3.3 TABLES OF RESULTS
Table 1. Each row lists the functions ),(hf )(hg and )(hj (distinguishing the non-
classical symmetries of the thin film equation (3.1)) with the associated infinitesimal
generator .iV
Group )(hf )(hg )(hj iV
I arbitrary 0≠ arbitrary arbitrary 1V
II 01 ≠f 1g 10 jhj + 2V
III 01 ≠f 1g 210 ln jjhj ++ 3V
IV 00
1 ≠hfef h
jf
eg 3
2
1
10 +
20
1 jejhj + 4V
V 003
1 ≠hgef
hgeg 0
1 20 jhj + 5V
VI ( ) 00
21 ≠+f
fhf ( ) 3
2
21
10 jf
fhg+
+ ( ) 2201 jfhjj
++ 6V
VII ( ) 003
21 ≠+g
fhf ( ) 0
21
gfhg + 220 ln jfhj ++ 7V
VIII 01 ≠f 1g 1j 8V
IX 01 ≠f 0 1j 9V

74
Table 2. A dimensional classification of the mathematical structure of groups (I)-(IX)
(the non-classical symmetries of the thin film equation (3.1)) with their associated
infinitesimal generators .iV
Group ),,( htxA ),,( htxB iV
I 0 4c 1V
II 02 ≠c 402 ctjc + 2V
III ( ) 011 ≠+ jhc 401 ctjc + 3V
IV 0
3
4
1
2
10
≠
+−
ctjf
2
10
521
10
3
43
ctjf
ctjjxjf
+−
+−−
4V
V 0
1
20
≠+ ctg
20
500
ctg
ctjxg
+
++ 5V
VI 0
3
42
10
2 ≠
+−
+
ctjf
fh
2
10
521
10
3
43
ctjf
ctjjxjf
+−
+−−
6V
VII 0
20
2 ≠+
+
ctg
fh
20
500
ctg
ctjxg
+
++ 7V
VIII ( )txbhc ,1 + 2c 8V
IX ( )txbh
ct
c,
4 2
1 ++
04
3
2
31 ≠+
++
ct
ctjx 9V
Table 3. All rows show the similarity solutions ),( txh not featured in chapter 2 for the
thin film equation (3.1) in tandem with groups (I)-(IX).
Group ),( txh
II ( ) ( ) 01110
9
7
54 ≠+−+�
=
−− dtjxced
n
tcxc
nn under the constraints ,005 =≠ jc
( ) ( ) ( ) 0162
2
412
4
3
1 411 ≠+++−+�=
−−dtdxdtcxced
n
tcxc
n
n
under the constraints
,0051 ==≠ jcg
( ) 02
5
1
1
4 ≠+−�=
−tctcxd
n
n
n under the constraints 0015 === jgc
III ( )01
10
7
641 ≠−�
=
−− jede
n
tcxc
n
tc n under the constraint 00 =j

75
3.4 CONCLUDING REMARKS
In this chapter, we obtained nine non-classical symmetries, namely groups (I)-(IX), of
the thin film equation (3.1) (identical to the thin film equation (2.1)) via the non-classical
symmetry method of Bluman and Cole [16].
A comparison of these nine non-classical symmetry groups with the eight classical Lie
symmetry groups constructed for the equivalent thin film equation (2.1) in chapter 2 of
this thesis showed that the thin film equation (3.1) does not admit any non-classical
symmetries arising beyond its classical symmetries. Applying the non-classical
symmetry method of Bluman and Cole [16] to the thin film equation (3.1) generates no
similarity solutions which are not retrievable via Lie classical analysis of the equivalent
thin film equation (2.1), performed in chapter 2 of this thesis.
In chapter 5 of this thesis, we examine the thin film equation (3.1) via an approach
combining the non-classical symmetry method of Bluman and Cole [16] and the
technique of symmetry-enhancing constraints presented and developed by Goard and
Broadbridge [29]. This combined approach enables us to determine the existence of non-
classical symmetries extending beyond the confines of those obtainable for the thin film
equation (3.1) solely by the non-classical symmetry method of Bluman and Cole [16].

76
CHAPTER 4
CLASSICAL SYMMETRY-ENHANCING
CONSTRAINTS FOR THE
THIN FILM EQUATION
4.1 INTRODUCTION
We apply the method of classical symmetry-enhancing constraints to obtain symmetry
groups for the thin film equation (2.1) given by
[ ] [ ] 0)()()( =++∂
∂−
∂
∂txxxxx hhhjhhg
xhhf
x; (4.1)
where the restriction 0)( ≠hf holds.
The technique of classical symmetry-enhancing constraints, outlined in the next section,
is identical to the method of symmetry-enhancing constraints, introduced and developed
by Goard and Broadbridge [29]. The method of classical symmetry-enhancing
constraints is so termed in order to differentiate it from the method of symmetry-
enhancing constraints [29] which is augmented by the non-classical procedure and
features in chapter 5 of this thesis.
From the perspective of this method, we studied various partitions of the thin film
equation (4.1). Two of these produced new Lie symmetry groups and generate the
respective systems
( ) 0)()(2
=′−+ xxt hhghhjh , [ ] 0)()( =−∂
∂xxxxx hhghhf
x; (4.2)
and
0)()( =+− txxxxxx hhhghhf , ( ) 0)()()(2
=+′−′xxxxxx hhjhhghhhf . (4.3)
On system (4.2), we impose the restrictions
(i) 0)( ≠hf , (ii) 0)( =hg and 0)( =′ hf do not occur jointly,
(iii) 0)( =′ hg and 0)( =hj do not occur together;
to prevent th and xxxxh from vanishing. We place system (4.3) under the condition
0)( ≠′ hf and the restrictions (i) and (iii) to prevent xxxh and xxxxh disappearing.

77
Next, we consider the one-parameter )(ε Lie group of general infinitesimal
transformations in ,x t and ,h namely
( ) ( )( ) ( )( ) ( );,,
,,,
,,,
2
1
2
1
2
1
εεζ
εεη
εεξ
Ohtxhh
Ohtxtt
Ohtxxx
++=
++=
++=
(4.4)
leaving systems (4.2) and (4.3) invariant.
Hence if ),( txh φ= , then from ),( 111 txh φ= , evaluating the expansion of ε∂
∂ 1h at 0=ε
yields the invariant surface condition
),,(),,(),,( htxt
hhtx
x
hhtx ζηξ =
∂
∂+
∂
∂. (4.5)
Solutions of equation (4.5) are functional forms of similarity solutions for systems (4.2)
and (4.3).
The following section contains a brief description of the technique of classical
symmetry-enhancing constraints. This involves using the Lie classical method to
determine the symmetry groups leaving systems (4.2) and (4.3) invariant.
4.2 THE METHOD OF CLASSICAL SYMMETRY-ENHANCING
CONSTRAINTS
Goard and Broadbridge define symmetry-enhancing constraints as “equations whose
addition to a target equation results in the enlarged system having at least one additional
symmetry not possessed by the original target equation on its own” [29]. These authors
describe the concept of the method of symmetry-enhancing constraints in terms of
random equation-splitting, whereby “single partial differential equations (PDEs) are
partitioned into a larger system of PDEs, chosen so that this system has a larger Lie
symmetry group than has the original PDE” [29]. Owing to the derivation of new Lie
symmetry groups from systems (4.2) and (4.3), symmetry-enhancing constraints are
considered to be added to the thin film equation (4.1).

78
The method of symmetry-enhancing constraints involves partitioning the equation of
interest into a larger system of PDEs before applying the classical procedure to this
system to retrieve its Lie classical groups [29]. Should this system yield Lie groups other
than those admitted by the original single equation (and which are not special cases of
groups admitted by the original equation), we may consider a symmetry-enhancing
constraint to be added to the original equation. Accordingly, we apply this treatment to
systems (4.2) and (4.3), briefly describing it with respect to system (4.2). The process is
identical for system (4.3).
The classical method involves equating to zero the infinitesimal version of system (4.2)
without using the invariant surface condition (4.5). In obtaining the infinitesimal version
of system (4.2), the highest order derivative in each equation within system (4.2) is
eliminated by expressing it with respect to all the remaining terms of the equation in
question. In equation (4.2)1 , we choose th for elimination, all derivatives in (4.2)1 being
of equal order. Prolongation of the action of group transformations (4.4) on system (4.2)
generates the invariance requirements, obtained by equating to zero the coefficient of ε
in the infinitesimal version of each of equations (4.2)1 and (4.2)2 . Terms of order 2ε are
neglected in these calculations since they involve relations between the group generators
ξ , η and ζ already considered in the coefficients of ε , the left-hand sides of the
invariance requirements.
System (4.2) remains invariant under group transformations (4.4) provided the group
generators ),,( htxξ , ),,( htxη and ),,( htxζ satisfy the determining equations
0=hξ , 0== xh ηη , 0=hhζ , 0)( =+ xt hj ζζ ,
[ ] 0)()(2)( =′′−−′−′ hgthg hx ζζηξ , [ ] 0)(2)()()( =′−−−′+′xtx hgthjhj ζξξηζ ,
0)(
)(=− xxxxxx
hf
hgζζ , ( ) 03)( =−′
xxxxxhhf ξζ , ( ) 0)( =−′xxxhhf ξζ , (4.6)
( ) 02)(
)(
)(
)(4 =−+
′+− xhxxxxxxxxxxxxh
hf
hg
hf
hfζξζξζ , 0
)(
)(=�
�
���
� ′ζ
hf
hf
dh
d,
0)(
)(2
)(
)(46 =−�
�
���
�−− xxxxxxh
hf
hg
hf
hg
dh
dξζξζ , 0
)(
)(64 =
′+− xxxxh
hf
hfζξζ .

79
Similarly, system (4.3) remains invariant under group transformations (4.4) provided the
group generators ),,( htxξ , ),,( htxη and ),,( htxζ satisfy the determining equations
0=hξ , 0== xh ηη , 0=hhζ , 0=− xxxh ξζ ,
( ) 03)(
)(
)(
)(
)(
)(=−
′−+
′
′−�
�
���
�
′ xhxxxxhf
hj
hf
hg
hf
hj
dh
dξζζζζ ,
0)(
)(
)(
)(23 =�
�
���
�
′
′−
′
′−−
hf
hg
dh
d
hf
hgxxxxxxh ζξξζ , 0
)(
)()(4 =
′−′−
hf
hftx ζηξ ,
0)(
)(2
)(
)(46 =−�
�
���
�−− xxxxxxh
hf
hg
hf
hg
dh
dξζξζ , (4.7)
( ) 064)(
)()()()( =−
′−+− xxxhxxxxxxt
hf
hjhfhfhg ξζζζζ ,
( ) ( ) ( ) 02)(64)(
)()(4)( =−−−−
′
′+− xxxhtxxxhxxxxxxxh hg
hf
hghfhf ξζξξζξζ .
Equating to zero the coefficients of all derivatives of h and the sum of all remaining
terms not involving derivatives of h within the invariance requirements for each of
systems (4.2) and (4.3) produces systems (4.6) and (4.7) respectively. All subscripts in
systems (4.6) and (4.7) symbolise partial differentiation with ,x t and h as independent
variables. Throughout this chapter, primes represent differentiation with respect to the
argument indicated.
Systems (4.6) and (4.7) enable the retrieval of all Lie classical symmetries and
corresponding conditions on 0)( ≠hf , )(hg and )(hj for the respective systems (4.2)
and (4.3) under transformations (4.4). System (4.2) admits six new Lie classical groups
extending beyond the confines of groups obtainable via the classical method for the thin
film equation (4.1). We recover one such new group for system (4.3). These new groups
enhance the symmetries of the thin film equation (4.1). One may therefore consider
symmetry-enhancing constraints to be added to the thin film equation (4.1).
We describe each of these groups in the following pages. Where applicable, we list the
special cases arising for each such group. Then we present the similarity solutions of
systems (4.2) and (4.3) associated with each of these groups. Solutions of systems (4.2)
and (4.3) are also solutions to the thin film equation (4.1).

80
GROUP (I)
Subject to the conditions 0)( 1 ≠= fhf , 0)( 1 ≠= ghg and 0)( 1 ≠= jhj , system (4.2)
admits classical group (I) given by
,)(),,( 31 ctjhtx += αξ ),(),,( thtx αη =
(4.8)
( )( ) ( )
;),,( 654121
11
11
1
1
cecectjxchchtxtjx
f
gtjx
f
g
+++−+=−−−
ζ
where ,01 ≠f ,01 ≠g 01 ≠j and ic are arbitrary constants for all i ∈ }6,5,4,3,2,1{
while )(tα is an arbitrary function of .t
A special case of group (4.8) emerges and is as follows.
Case (1) The case of group (4.8) with 0=ic for all i ∈ }6,5,4,2,1{ and
7)( ct =β occurs under conditions 0)( 1 ≠= fhf , 0)( 1 ≠= ghg and 0)( ≠hj is an
arbitrary function of h where 01 ≠f , 01 ≠g and 7c are arbitrary constants.
Similarity Solutions
Group (4.8), system (4.2) and the invariant surface condition (4.5) give the equations
,01 =+ xt hjh ,01
1 =− xxxxxx hf
gh
(4.9)
xhc3 ( )( ) ( )
;654121
11
11
1
1
cecectjxchctjx
f
gtjx
f
g
+++−+=−−−
where ,01 ≠f ,01 ≠g 01 ≠j and ic are arbitrary constants for all i ∈ }.6,5,4,3,2,1{ As
0=xh forces 0=th in equation (4.9)1 , giving =),( txh constant, we require 0≠xh for
system (4.9) to yield nonconstant similarity solutions.
Via the method in [24], we find the general solution of equation (4.9)1 to be the
travelling wave of velocity ,01 ≠j namely
);(),( uytxh = (4.10)
where 01 ≠j is an arbitrary constant and )(uy is an arbitrary function of .1tjxu −= We
require 0)( ≠′ uy for solution (4.10) to be nonconstant.

81
Substituting solution (4.10) into equation (4.9)2 and solving the resulting equation via the
method in [48] yields the general solution
;)( 43211
1
1
1
dudededuyu
f
gu
f
g
+++=−
(4.11)
where tjxu 1−= while ,01 ≠f ,01 ≠g ,01 ≠j ,1d ,2d 3d and 4d are arbitrary
constants. For solution (4.11) to be nonconstant requires
.0321
1
1 1
1
1
1
≠+��
�
�
�−
−
dededf
g uf
gu
f
g
For the purpose of obtaining nonconstant similarity solutions from system (4.9), we
impose the restriction .0≠xh Accordingly, equation (4.9)3 generates the cases
(1) 0=ic for all i ∈ },6,5,4,3,2,1{
(2) ,03 ≠c ( )( ) ( )
.0654121
11
11
1
1
≠+++−+−−−
cecectjxchctjx
f
gtjx
f
g
Case (1) 0=ic for all i ∈ }6,5,4,3,2,1{
Under the condition 0=ic for all i ∈ },6,5,4,3,2,1{ equation (4.9)3 vanishes.
Results (4.10) and (4.11) imply that under transformations (4.4) and conditions
,0)( 1 ≠= fhf 0)( 1 ≠= ghg and ,0)( 1 ≠= jhj the similarity solution of system (4.2)
and the thin film equation (4.1) in association with group (4.8) subject to the constraint
0=ic for all i ∈ }6,5,4,3,2,1{ is the travelling wave of velocity ,01 ≠j namely
( ) ( )
( ) ;),( 41321
11
11
1
1
dtjxdededtxhtjx
f
gtjx
f
g
+−++=−−−
(4.12)
where ,01 ≠f ,01 ≠g ,01 ≠j ,1d ,2d 3d and 4d are arbitrary constants. We require
( ) ( )
0321
1
11
1
11
1
1
≠+��
�
�
��
�
�−
−−−
dededf
g tjxf
gtjx
f
g
for solution (4.12) to be nonconstant.
Figure (4a) displays thin film height profiles for solution (4.12) of system (4.2) at the
times =t 0, 1, 2 and 3 respectively.

82
Figure (4a). Thin film height )(h profile versus position )(x at the times =t 0, 1, 2, 3
for 1421111 ====== dddjgf and .13 −=d
Figure (4a) clearly indicates that as time increases, the fluid flows from where its
concentration is greatest to where it is least.
Case (2) ,03 ≠c ( )( ) ( )
0654121
11
11
1
1
≠+++−+−−−
cecectjxchctjx
f
gtjx
f
g
Substituting results (4.10) and (4.11) into equation (4.9)3 yields the subcases
(a) ,04
1
131 =≠= c
f
gcc ,
21
13
5
2
f
gc
cd −= ,
1
13
23
f
gc
cd −= ,
13
1
1621
4gc
f
gccf
d
��
�
�
�+
−=
(b) ,05
1
131 =≠−= c
f
gcc ,
21
13
41
f
gc
cd = ,
1
13
23
f
gc
cd = ,
13
2
1
161
4gc
cf
gcf
d
��
�
�
�−
=
(c) ≠3c ,021 == cc ,
1
13
41
f
gc
cd = ,
1
13
5
2
f
gc
cd −= ,
3
6
3c
cd =
(d) ,01
131 ≠±
f
gcc ,031 ≠cc ,
1
131
41
f
gcc
cd
−
−= ,
1
131
5
2
f
gcc
cd
+
−= ,1
23
c
cd −=
.2
1
3261
4c
ccccd
+−=

83
For subcases (a), (b), (c) and (d), it follows from results (4.10) and (4.11) that under
transformations (4.4) and conditions ,0)( 1 ≠= fhf 0)( 1 ≠= ghg and ,0)( 1 ≠= jhj
the similarity solution of system (4.2) and the thin film equation (4.1) in connection with
group (4.8) and subject to the constraints on each subcase is the travelling wave (4.12)
where ,03 ≠c ,01 ≠f ,01 ≠g ,01 ≠j ,1d ,2d 3d and 4d are arbitrary constants such
that ( ) ( )
0321
1
11
1
11
1
1
≠+��
�
�
��
�
�−
−−−
dededf
g tjxf
gtjx
f
g
for solution (4.12) to be nonconstant.
The combinations of ic expressing ,1d ,2d 3d and 4d in subcases (a), (b), (c) and (d)
form arbitrary constants.
GROUP (II)
Under conditions 0)( 2
0 ≠= hfhf , 0)( =hg and 0)( 1 ≠= jhj , system (4.2) admits
classical group (II) given by
( ) ( ) ,)(2
),,( 3112
2
11 ctjtjxctjx
chtx ++−+−= αξ ),(),,( thtx αη =
(4.13)
( )[ ]hctjxchtx 411),,( +−=ζ ;
where 00 ≠f , 01 ≠j and ic are arbitrary constants for all i ∈ }4,3,2,1{ while )(tα is
an arbitrary function of t . Furthermore, .0≠h
Two special cases of group (4.13) occur and are as follows.
Case (1) The case of group (4.13) with 041 == cc arises under the conditions
0)( ≠hf is an arbitrary function of ,h 0)( =hg and 0)( 1 ≠= jhj where 01 ≠j is an
arbitrary constant and .0)( ≠′ hf
Case (2) The case of group (4.13) with 01 =c appears under conditions
,0)( 5
0 ≠= chfhf 0)( =hg and 0)( 1 ≠= jhj where ,05 ≠c 00 ≠f and 01 ≠j are
arbitrary constants while 0≠h .

84
Similarity Solutions
Group (4.13), system (4.2) and the invariant surface condition (4.5) imply
01 =+ xt hjh , 02
=+ xxxxxxxx hhh
h ,
(4.14)
( ) ( ) ( )[ ] hctjxchctjxctjxc
x 411312
2
1
1
2+−=�
�
���
�+−+− ;
where 01 ≠j and ic are arbitrary constants for all i ∈ }4,3,2,1{ and 0≠h . Since
0=xh forces 0=th in equation (4.14)1 , giving =),( txh constant, we require 0≠xh
for system (4.14) to generate nonconstant similarity solutions.
By the method in [24], we deduce the general solution of equation (4.14)1 to be the
travelling wave solution of velocity 01 ≠j , namely
0)(),( ≠= uytxh ; (4.15)
where 01 ≠j is an arbitrary constant and 0)( ≠uy is an arbitrary function of .1tjxu −=
We require 0)( ≠′ uy for solution (4.15) to be nonconstant.
Substituting result (4.15) into equations (4.14)2 and (4.14)3 yields the cases
(1) 0)( ==′′′icuy for all i ∈ },4,3,2,1{ (2) 0)( =≠′′′
icuy for all i ∈ },4,3,2,1{
(3) .02
32
21 ≠++ cucuc
Case (1) 0)( ==′′′icuy for all i ∈ }4,3,2,1{
Equations (4.14)2 and (4.14)3 vanish under the constraint on this case.
Result (4.15) reflects that under transformations (4.4) and conditions 0)( 2
0 ≠= hfhf ,
0)( =hg and 0)( 1 ≠= jhj , the similarity solution of system (4.2) and the thin film
equation (4.1) in tandem with group (4.13) subject to the constraint 0=ic for all
i ∈ }4,3,2,1{ is the travelling wave of velocity 01 ≠j , namely
( ) ( ) 0),( 716
2
15 ≠+−+−= ctjxctjxctxh ; (4.16)
where 01 ≠j , 5c , 6c and 7c are arbitrary constants. We require ( ) 02 615 ≠+− ctjxc for
solution (4.16) to be nonconstant.

85
Case (2) 0)( =≠′′′icuy for all i ∈ }4,3,2,1{
Under this constraint , equation (4.14)3 vanishes.
Result (4.15) and equation (4.14)2 imply that under transformations (4.4) and conditions
0)( 2
0 ≠= hfhf , 0)( =hg and 0)( 1 ≠= jhj , the similarity solution of system (4.2) and
the thin film equation (4.1) associated with group (4.13) under the constraint 0=ic for
all i ∈ }4,3,2,1{ is the travelling wave (4.15) satisfying the equation
0)()( 5
2 ≠=′′′ cuyuy ; (4.17)
where 05 ≠c and 01 ≠j are arbitrary constants while tjxu 1−= and .0)( ≠′′′ uy
Case (3) 02
32
21 ≠++ cucuc
We consider the subcases
(a) ,24 cc = (b) ,02 124 =≠= ccc (c) ( ) .022
24
1
4
31 =−+≠ ccc
ccc
Subcase (a) ,02
32
21 ≠++ cucuc
24 cc =
Result (4.15) and equations (4.14)2 and (4.14)3 imply that under transformations (4.4)
and conditions 0)( 2
0 ≠= hfhf , 0)( =hg and 0)( 1 ≠= jhj , the similarity solution of
system (4.2) and the thin film equation (4.1) in conjunction with group (4.13) subject to
the constraints on this subcase is the travelling wave of velocity 01 ≠j , namely
( ) ( ) 02
),( 312
2
1
1
5 ≠��
���
�+−+−= ctjxctjx
cctxh ; (4.18)
where ,05 ≠c 01 ≠j and ic are arbitrary constants for all i ∈ }3,2,1{ while
( ) ( ) .02
312
2
11 ≠+−+− ctjxctjx
c We require ( ) 0211 ≠+− ctjxc for solution (4.18) to
be nonconstant.

86
Subcase (b) ,032 ≠+ cuc 02 124 =≠= ccc
Relations (4.14)2 , (4.14)3 and (4.15) reflect that under transformations (4.4) and
conditions ,0)( 2
0 ≠= hfhf 0)( =hg and ,0)( 1 ≠= jhj the similarity solution of
system (4.2) and the thin film equation (4.1) in connection with group (4.13) subject to
the restriction 02 124 =≠= ccc is the travelling wave of velocity ,01 ≠j namely
( )[ ] ;0),( 2
3125 ≠+−= ctjxcctxh (4.19)
where ,02 ≠c ,05 ≠c 01 ≠j and 3c are arbitrary constants with ( ) .0312 ≠+− ctjxc
Subcase (c) ,02
32
21 ≠++ cucuc
( ) 022
24
1
4
31 =−+≠ ccc
ccc
Equations (4.14)2 , (4.14)3 and (4.15) indicate that under transformations (4.4) and
conditions ,0)( 2
0 ≠= hfhf 0)( =hg and ,0)( 1 ≠= jhj the similarity solution of
system (4.2) and the thin film equation (4.1) in tandem with group (4.13) and the
constraints on this subcase is the travelling wave of velocity ,01 ≠j namely
( ) ;0),(2
615 ≠+−= ctjxctxh (4.20)
where ,01 ≠c ,05 ≠c ,01 ≠j ,2c 4c and 1
42
6
2
c
ccc
−= are arbitrary constants with
.061 ≠+− ctjx
GROUP (III)
Subject to conditions ( ) ,0)(2
20 ≠+= chfhf 0)( =hg and ,0)( 1 ≠= jhj system (4.2)
admits classical group (III) given by
( ) ( ) ,0)(2
),,( 4113
2
11 ≠++−+−= ctjtjxctjx
chtx αξ ),(),,( thtx αη =
(4.21)
( )( ) ;0),,( 5121 ≠+−+= ctjxchchtxζ
where ,01 ≠c ,02 ≠c ,00 ≠f ,01 ≠j ,3c 4c and 5c are arbitrary constants such that
( )( ) 0512 ≠+−+ ctjxch and ( ) ( ) 0)(2
4113
2
11 ≠++−+− ctjtjxctjx
cα while )(tα is an
arbitrary function of .t

87
Similarity Solutions
Group (4.21), system (4.2) and the invariant surface condition (4.5) yield the equations
,01 =+ xt hjh ,02
2
=+
+ xxxxxxxx hhch
h
(4.22)
( ) ( ) ( )( ) ;02
5121413
2
1
1 ≠+−+=��
���
�+−+− ctjxchchctjxctjx
cx
where ,01 ≠c ,02 ≠c ,01 ≠j ,3c 4c and 5c are arbitrary constants with
( )( ) 0512 ≠+−+ ctjxch and ( ) ( ) .02
413
2
11 ≠+−+− ctjxctjx
c For equation (4.22)3 to
be consistent requires ,0≠xh forcing 0≠th in equation (4.22)1 .
By the method in [24], we find the general solution of equation (4.22)1 to be the
travelling wave solution of velocity ,01 ≠j namely
;0)(),( ≠= uytxh (4.23)
where 01 ≠j is an arbitrary constant and 0)( ≠uy is an arbitrary function of tjxu 1−=
such that 0)( ≠′ uy since .0≠xh
Equations (4.22)2 and (4.22)3 yield the cases
(1) ,513 ccc = (2) .2
51
354 ��
�
�−=
ccccc
Case (1) 513 ccc =
Result (4.23) with equations (4.22)2 and (4.22)3 imply that under transformations (4.4)
and the conditions ( ) ,0)(2
20 ≠+= chfhf 0)( =hg and ,0)( 1 ≠= jhj the similarity
solution of system (4.2) and the thin film equation (4.1) in association with group (4.21)
subject to the constraint 513 ccc = is the travelling wave of velocity ,01 ≠j namely
( ) ( )[ ] ;0),( 817
2
16 ≠+−+−= ctjxctjxctxh (4.24)
where ,01 ≠c ,02 ≠c ,06 ≠c ,01 ≠j ,4c ,5c 57 2cc = and 2
1
64
8 2 cc
ccc −= are
arbitrary constants with 051 ≠+− ctjx and ( ) ( ) .02
4151
2
11 ≠+−+− ctjxcctjx
c

88
Case (2) ��
�
�−=
2
51
354
ccccc
Result (4.23) and equations (4.22)2 and (4.22)3 reveal that under transformations (4.4)
and the conditions ( ) ,0)(2
20 ≠+= chfhf 0)( =hg and ,0)( 1 ≠= jhj the similarity
solution for system (4.2) and the thin film equation (4.1) in connection with group (4.21)
under the constraint ��
�
�−=
2
51
354
ccccc is the travelling wave of velocity ,01 ≠j namely
( ) ;0),( 2
2
716 ≠−+−= cctjxctxh (4.25)
where ,01 ≠c ,02 ≠c ,06 ≠c ,01 ≠j ,3c 5c and 5
1
3
7
2c
c
cc −= are arbitrary constants
while ( )( ) .05171 ≠+−+− ctjxctjx
GROUP (IV)
Under conditions 0)( ≠hf is an arbitrary function of ,h 1)( ghg = and ,0)( 1 ≠= jhj
system (4.2) admits classical group (IV) given by
,)(),,( 11 ctjhtx += αξ ),(),,( thtx αη = ;0),,( =htxζ (4.26)
where ,01 ≠j 1c and 1g are arbitrary constants while )(tα is an arbitrary function of .t
Furthermore 0)( 1 ==′ ghf does not occur.
A special case of group (4.26) arises and is as follows.
Case (1) The case of group (4.26) with 32)( ctct +=α appears under conditions
,0)( ≠hf )(hg and )(hj are arbitrary functions of h where 2c and 3c are arbitrary
constants. Neither 0)()( ==′ hghf nor 0)()( ==′ hjhg occurs.

89
Similarity Solutions
Group (4.26), system (4.2) and the invariant surface condition (4.5) yield the equations
,01 =+ xt hjh [ ] ,0)( 1 =−∂
∂xxxxx hghhf
x ;01 =xhc (4.27)
where ,01 ≠j 1c and 1g are arbitrary constants with 0)( ≠hf a function of h such that
0)( 1 ==′ ghf does not occur. Since 0=xh forces 0=th in equation (4.27)1 , yielding
only constant solutions for system (4.27), we require 0≠xh for system (4.27) to
generate nonconstant solutions. This requirement forces 01 =c in equation (4.27)3 .
By the method in [24], we solve equation (4.27)1 and substitute its general solution into
equation (4.27)2 . Consequently, it is clear that under transformations (4.4) and the
conditions 0)( ≠hf is an arbitrary function of ,h 1)( ghg = and ,0)( 1 ≠= jhj the
similarity solution of system (4.2) and the thin film equation (4.1) in connection with
group (4.26) and the constraint 01 =c is the travelling wave of velocity ,01 ≠j namely
;)(),( uytxh = (4.28)
such that
( ) ( ) ;0)()()()()()( 1
)4( =′′−′′′′′+ uyguyuyuyfuyuyf (4.29)
where 01 ≠j and 1g are arbitrary constants while tjxu 1−= and ( ) 0)( ≠uyf is a
function of )(uy such that ( ) 0)( 1 ==′ guyf does not occur. We require 0)( ≠′ uy for
solution (4.28) to be nonconstant. As ,01 ≠j solution (4.28) is not reducible to a steady
state solution of system (4.2) and the thin film equation (4.1).
GROUP (V)
Subject to the conditions ,0)( 0
1 ≠= hfefhf 1)( ghg = and ,0)( 1 ≠= jhj system (4.2)
admits classical group (V) given by
( ) ,)(2
),,( 211
01 ctjtjxfc
htx ++−= αξ ),(),,( thtx αη = ;0),,( 1 ≠= chtxζ (4.30)
where )(tα is an arbitrary function of t while ,01 ≠c ,01 ≠f ,01 ≠j ,2c 0f and 1g are
arbitrary constants with 001 == fg not occurring.
A special case of group (4.30) emerges and is as follows.

90
Case (1) The case of group (4.30) with 43)( ctct +=α arises under the conditions
,0)( ≠hf )(hg and )(hj are arbitrary functions of h where 3c and 4c are arbitrary
constants. Neither 0)()( ==′ hghf nor 0)()( ==′ hjhg occurs.
Similarity Solutions
Group (4.30), system (4.2) and the invariant surface condition (4.5) imply
,01 =+ xt hjh ( ) ,01010 =−+ xxxxxxxxxx
hfhghhfhef ( ) ;0
2121
01 ≠=��
���
�+− chctjx
fcx
(4.31)
where ,01 ≠c ,01 ≠f ,01 ≠j ,2c 0f and 1g are arbitrary constants with 001 == fg
not occurring and ( ) .02
21
01 ≠+− ctjxfc
Consistency in equation (4.31)3 requires
,0≠xh forcing 0≠th in equation (4.31)1 .
By the method in [24], we find the general solution of equation (4.31)1 to be the
travelling wave of velocity 01 ≠j , namely
;0)(),( ≠= uytxh (4.32)
where 01 ≠j is an arbitrary constant and 0)( ≠uy is an arbitrary function of tjxu 1−=
such that 0)( ≠′ uy since .0≠xh
Equation (4.31)3 yields the cases (1) ,00 ≠f (2) .002 =≠ fc
Case (1) 00 ≠f
Substituting result (4.32) into equation (4.31)3 , directly solving the resulting equation
and substituting its general solution with result (4.32) into equation (4.31)2 forces the
constraint .02 04
11 ≠= fcefg Hence under transformations (4.4) and the conditions
,0)( 0
1 ≠= hfefhf 0)( 1 ≠= ghg and ,0)( 1 ≠= jhj the similarity solution of system
(4.2) and the thin film equation (4.1) in tandem with group (4.30) and the constraints
00 ≠f and 02 04
11 ≠= fcefg is the travelling wave of velocity 01 ≠j , namely
;0ln2
),( 431
0
≠++−= cctjxf
txh (4.33)
where ,01 ≠c ,00 ≠f ,01 ≠f ,01 ≠j ,2c 01
2
3
2
fc
cc = and 4c are arbitrary constants with
.031 ≠+− ctjx

91
Case (2) 002 =≠ fc
We substitute result (4.32) into equation (4.31)3 , directly solve the resulting equation
and substitute its general solution with result (4.32) into equation (4.31)2 , causing
equation (4.31)2 to vanish. Hence under transformations (4.4) and the conditions
,0)( 1 ≠= fhf 0)( 1 ≠= ghg and ,0)( 1 ≠= jhj the similarity solution of system (4.2)
and the thin film equation (4.1) in association with group (4.30) and the constraint
002 =≠ fc is the travelling wave of velocity ,01 ≠j namely
( ) ;0),( 413 ≠+−= ctjxctxh (4.34)
where ,01 ≠c ,02 ≠c ,02
1
3 ≠=c
cc 01 ≠j and 4c are arbitrary constants.
GROUP (VI)
Under the conditions ( ) 0)( 0
21 ≠+=f
fhfhf , 1)( ghg = and 0)( 1 ≠= jhj , system (4.2)
admits classical group (VI) given by
( ) ,)(2
),,( 211
01 ctjtjxfc
htx ++−= αξ ),(),,( thtx αη = ( ) ;0),,( 21 ≠+= fhchtxζ
(4.35)
where )(tα is an arbitrary function of t while ,01 ≠c ,01 ≠f ,01 ≠j ,2c ,0f 2f and
1g are arbitrary constants with 001 == fg not occurring and .02 ≠+ fh
A special case of group (4.35) arises and is as follows.
Case (1) The case of group (4.35) with 43)( ctct +=α appears under conditions
,0)( ≠hf )(hg and )(hj are arbitrary functions of h where 3c and 4c are arbitrary
constants. Neither 0)()( ==′ hghf nor 0)()( ==′ hjhg occurs.

92
Similarity Solutions
Group (4.35), system (4.2) and the invariant surface condition (4.5) generate equations
,01 =+ xt hjh ( ) ,1
2
0
210
xxxxxxxxxx
fhghh
fh
fhfhf =��
�
�
�
+++
(4.36)
( ) ( ) ;02
2121
01 ≠+=��
���
�+− fhchctjx
fcx
where ( ) 02
21
01 ≠+− ctjxfc
and 02 ≠+ fh while ,01 ≠c ,01 ≠f ,01 ≠j ,2c ,0f 2f
and 1g are arbitrary constants with 001 == fg not occurring. Consistency in equation
(4.36)3 requires ,0≠xh forcing 0≠th in equation (4.36)1 .
Via the method in [24], we deduce the general solution of equation (4.36)1 to be the
travelling wave of velocity ,01 ≠j namely
;0)(),( ≠= uytxh (4.37)
where 01 ≠j is an arbitrary constant and 0)( ≠uy is an arbitrary function of tjxu 1−=
with 0)( ≠′ uy since .0≠xh
Equation (4.36)3 admits the cases (1) ,00 ≠f (2) .002 =≠ fc
Case (1) 00 ≠f
Substituting result (4.37) into equation (4.36)3 , directly solving the resulting equation
and substituting its general solution with result (4.37) into equation (4.36)2 yields the
subcases (a) ,20 =f (b) ( )( ).122
002
0
31
1
0
−−= fff
cfg
f
Subcase (a) 20 =f
Under transformations (4.4) with the conditions ( ) ,0)(2
21 ≠+= fhfhf 1)( ghg = and
,0)( 1 ≠= jhj the similarity solution of system (4.2) and the thin film equation (4.1)
associated with group (4.35) and the constraint 20 =f is the travelling wave of velocity
,01 ≠j namely
( ) ;0),( 2413 ≠−+−= fctjxctxh (4.38)
where ,01 ≠c ,03 ≠c ,01 ≠j ,2c 1
2
4c
cc = and 2f are arbitrary constants with
.041 ≠+− ctjx

93
Subcase (b) ,00 ≠f ( )( )122
002
0
31
1
0
−−= fff
cfg
f
Subject to transformations (4.4) with conditions ( ) ,0)( 0
21 ≠+=f
fhfhf 1)( ghg = and
,0)( 1 ≠= jhj the similarity solution of system (4.2) and the thin film equation (4.1) in
tandem with group (4.35) and the constraints 00 ≠f and ( )( )122
002
0
31
1
0
−−= fff
cfg
f
is
the travelling wave of velocity ,01 ≠j namely
( ) ;0),( 2
/2
4130 ≠−+−= fctjxctxh
f (4.39)
where ,01 ≠c ,03 ≠c ,00 ≠f ,01 ≠f ,01 ≠j ,2c 01
2
4
2
fc
cc = and 2f are arbitrary
constants with .041 ≠+− ctjx
Case (2) 002 =≠ fc
Substituting result (4.37) into equation (4.36)3 , directly solving the resulting equation
and substituting its general solution with result (4.37) into equation (4.36)2 yields the
constraint .02
411 ≠= cfg Therefore under transformations (4.4) and the conditions
,0)( 1 ≠= fhf 0)( 1 ≠= ghg and ,0)( 1 ≠= jhj the similarity solution of system (4.2)
and the thin film equation (4.1) in conjunction with group (4.35) and the constraints
002 =≠ fc and 02
411 ≠= cfg is the travelling wave of velocity ,01 ≠j namely
( )
;0),( 2314 ≠−= −
fectxhtjxc
(4.40)
where ,01 ≠c ,02 ≠c ,03 ≠c ,02
1
4 ≠=c
cc ,01 ≠f 01 ≠j and 2f are arbitrary
constants.

94
GROUP (VII)
Subject to the conditions ( ) ,0)(4
21 ≠+= fhfhf ( ) 0)(4
2
2
21 ≠+= fhcfhg and
,0)( =hj system (4.3) admits classical group (VII), namely
,),,( 43122 cecechtxxcxc ++= −ξ ,),,( 65 ctchtx +=η
(4.41)
( ) ;04
),,( 2
5
322122 ≠+�
�
�
�−−= −
fhc
eccecchtxxcxcζ
where ,02 ≠c ,01 ≠f ,1c ,3c ,4c ,5c 6c and 2f are arbitrary constants with
( ) 04
5
31222 ≠−− − c
ececcxcxc and .02 ≠+ fh
Similarity Solutions
Group (4.41), system (4.3) and the invariant surface condition (4.5) imply
( ),0
1
4
22
2 =+
+−−
txxxxxx hf
fhhch ( ) ,0
2
2 =− xxxxx hchh
(4.42)
( ) ( ) ( ) ;04
2
5
3221654312222 ≠+�
�
�
�−−=++++ −−
fhc
eccecchctchcececxcxc
tx
xcxc
where ,02 ≠c ,01 ≠f ,1c ,3c ,4c ,5c 6c and 2f are arbitrary constants with
( ) 04
5
31222 ≠−− − c
ececcxcxc and .02 ≠+ fh Since 0=xh forces 0=th in equation
(4.42)1 , generating the contradiction ( ) 04
2
5
322122 =+�
�
�
�−− −
fhc
ecceccxcxc
in equation
(4.42)3 , we require 0≠xh for equation (4.42)3 to be consistent.
The requirement 0≠xh forces equation (4.42)2 to give
;02
2 ≠= xxxx hch (4.43)
where 02 ≠c is an arbitrary constant and .0≠xh

95
As relation (4.43) forces 0=th in equation (4.42)1 , equations (4.42) and (4.43) imply
,0)(),( ≠= xytxh ,0)()(2
2 ≠′=′′′ xycxy
( );04
)(
)(
431
5312
222
22
≠++
−−=
+
′−
−
cecec
cececc
fxy
xyxcxc
xcxc
(4.44)
where ,0)( 2 ≠+ fxy ( ) 04
5312
22 ≠−− − cececc
xcxc and 043122 ≠++ −
cececxcxc
with
,02 ≠c ,1c ,3c 4c and 2f being arbitrary constants. Furthermore 0)( ≠′ xy owing to the
requirement .0≠xh
Result (4.44)1 indicates steady state solutions to be the only similarity solutions of
system (4.3) and the thin film equation (4.1) under the conditions on ,0)( ≠hf )(hg and
)(hj for group (4.41).
Via the method in [48], we find the general solution of equation (4.44)2 to be the steady
state solution
;0)( 98722 ≠++= −
cececxyxcxc
(4.45)
where ,02 ≠c ,7c 8c and 9c are arbitrary constants with .022
87 ≠− − xcxcecec
Substituting result (4.45) into equation (4.44)3 and manipulating the resulting equation
yields the cases
(1) ,0751 ≠ccc ( )
,64
162
21
2
5
2
42
3cc
cccc
−=
( )[ ],
64
282
2
2
1
54242
2
57
8cc
cccccccc
++=
( )
,4
42
21
5427
9 fcc
ccccc −
+=
(2) ,0853 ≠ccc ( )
,64
16
3
2
2
2
5
2
42
1cc
cccc
−=
( )[ ],
64
282
3
2
2
54242
2
5
87cc
cccccccc
−+=
( )
,4
42
32
5428
9 fcc
ccccc −
−=
(3) ,0731854 ===≠ cccccc ,04 4
5
2 ≠=c
cc ,29 fc −=
(4) ,0831754 ===≠ cccccc ,04 4
5
2 ≠−=c
cc ,29 fc −=
(5) ,0571 =≠ ccc ,1
73
8c
ccc = ,2
1
74
9 fc
ccc −=
(6) ,0583 =≠ ccc ,3
81
7c
ccc = .2
3
84
9 fc
ccc −=

96
For cases (1) - (6), relations (4.44)1 and (4.45) imply that under transformations (4.4) and
conditions ( ) ,0)(4
21 ≠+= fhfhf ( ) 0)(4
2
2
21 ≠+= fhcfhg and ,0)( =hj the
similarity solution of system (4.3) and the thin film equation (4.1) in association with
group (4.41) and the constraints on each case is the steady state solution
;0),( 98722 ≠++= −
cecectxhxcxc
(4.46)
where ,02 ≠c ,7c 8c and 9c are arbitrary constants with 022
87 ≠− − xcxcecec since
0≠xh is a requirement. In cases (1) – (6), the combinations of ic expressing ,1c ,3c
,7c 8c and 9c form arbitrary constants.
Figure (4b) displays the thin film height profile of solution (4.46) for case (1) at the
position ∈x [ ]1,0 .
Figure (4b). Thin film height ( )h profile versus position ( )x for .19872 ==== cccc
We present four tables of results at the end of this chapter. Table 1 outlines the functions
),(hf )(hg and )(hj (distinguishing enhanced symmetries of thin film equation (4.1))
with their associated infinitesimal generators .iV Table 2 displays a dimensional
classification of the mathematical structure of groups (I)-(VII) and the corresponding .iV
Table 3 features the similarity solutions ),( txh with their similarity variables ),( txu
(where applicable) for systems (4.2) and (4.3) in tandem with groups (I)-(VII). Table 4
shows the defining ordinary differential equations (ODEs) for the functions )(uy within
the functional forms of ),( txh relating to groups (II) and (IV) in table 3.

97
Each infinitesimal generator iV for all i ∈ }7,...,2,1{ represents the Lie algebra for the
respective Lie groups (I)-(VII); (see Gandarias [27]). These generators are as follows.
A List of the Infinitesimal Generators for Groups (I)-(VII)
The generators iV for all i ∈ }7,...,2,1{ for the respective groups (I)-(VII) are
[ ] ( )( ) ( )
,)()( 654121311
11
11
1
1
hcecectjxchc
tt
xctjV
tjxf
gtjx
f
g
∂
∂
��
�
�
��
�
�+++−++
∂
∂+
∂
∂+=
−−−
αα
( ) ( ) ( )[ ] ,)()(2
4113112
2
1
1
2h
hctjxct
tx
ctjtjxctjxc
V∂
∂+−+
∂
∂+
∂
∂��
���
�++−+−= αα
( ) ( ) ( )( ) ,)()(2
51214113
2
1
1
3h
ctjxchct
tx
ctjtjxctjxc
V∂
∂+−++
∂
∂+
∂
∂��
���
�++−+−= αα
[ ] ,)()( 114t
tx
ctjV∂
∂+
∂
∂+= αα
( ) ,)()(2
1211
01
5h
ct
tx
ctjtjxfc
V∂
∂+
∂
∂+
∂
∂��
���
�++−= αα
( ) ( ) ,)()(2
21211
01
6h
fhct
tx
ctjtjxfc
V∂
∂++
∂
∂+
∂
∂��
���
�++−= αα
( ) ( ) ( ) ;4
2
5
32216543172222
hfh
ceccecc
tctc
xcececV
xcxcxcxc
∂
∂+�
�
�
�−−+
∂
∂++
∂
∂++= −−
where details of each iV for all i ∈ }7,...,2,1{ relate to the respective groups (I)-(VII).
4.3 TABLES OF RESULTS
Table 1. Each row lists the functions ),(hf )(hg and )(hj (distinguishing the enhanced
symmetries of thin film equation (4.1)) with the associated infinitesimal generators .iV
Group )(hf )(hg )(hj iV
I 01 ≠f 01 ≠g 01 ≠j 1V
II 02
0 ≠hf 0 01 ≠j 2V
III ( ) 02
20 ≠+ chf 0 01 ≠j 3V
IV arbitrary 0≠ 1g 01 ≠j 4V
V 00
1 ≠hfef 1g 01 ≠j 5V
VI ( ) 00
21 ≠+f
fhf 1g 01 ≠j 6V
VII ( ) 04
21 ≠+ fhf ( ) 04
2
2
21 ≠+ fhcf 0 7V

98
Table 2. A dimensional classification of the mathematical structure of groups (I)-(VII)
(the enhanced symmetries of the thin film equation (4.1)) with their associated
infinitesimal generators .iV
),,( htxξ ),,( htxη ),,( htxζ iV
31 )( ctj +α )(tα
( )( )tjx
f
g
ectjxchc1
1
1
4121
−
+−+
( )
65
11
1
cectjx
f
g
++−−
1V
( ) ( ) 3112
2
11 )(
2ctjtjxctjx
c++−+− α
)(tα ( )[ ] hctjxc 411 +− 2V
( ) ( ) 0)(2
4113
2
11 ≠++−+− ctjtjxctjx
cα
)(tα ( )( ) 05121 ≠+−+ ctjxchc 3V
11 )( ctj +α )(tα 0 4V
( ) 21101 )(
2ctjtjx
fc++− α
)(tα 01 ≠c 5V
( ) 21101 )(
2ctjtjx
fc++− α
)(tα ( ) 021 ≠+ fhc 6V
43122 cececxcxc ++ −
65 ctc + ( ) 0
42
5
322122 ≠+�
�
�
�−− −
fhc
ecceccxcxc
7V
The entries for ),,,( htxξ ),,( htxη and ),,( htxζ in each of rows 1 – 7 in table 2
respectively relate to Lie classical groups (I) – (VII).

99
Table 3. Rows 1-14 list the similarity solutions ),( txh and any corresponding similarity
variables ),( txu for system (4.2) associated with groups (I)-(VI). Row 15 features the
similarity solution ),( txh for system (4.3) in connection with group (VII). Cases 4, 2(1),
1(1,2) and 6(1a) relate to group (IV), group (II) case (1), group (I) cases (1) and (2) and
group (VI) case (1) subcase (a) respectively. The same denotation pattern applies to
other similarly-named cases in this table.
Case ),( txh ),( txu
1(1,2) ( ) ( )
( ) 41321
11
11
1
1
dtjxdededtjx
f
gtjx
f
g
+−++−−−
2(1) ( ) ( ) 0716
2
15 ≠+−+− ctjxctjxc under the constraints
04321 ==== cccc
2(2) ( ) 0),( ≠txuy under the constraints 0)( 4321 ====≠′′′ ccccuy tjx 1−
2(3a) ( ) ( ) 0
2312
2
1
1
5 ≠��
���
�+−+− ctjxctjx
cc under the constraint 24 cc =
2(3b) ( )[ ] 02
3125 ≠+− ctjxcc under the constraints 02 124 =≠= ccc
2(3c) ( ) 02
615 ≠+− ctjxc under the constraints
( ) 022
24
1
4
31 =−+≠ ccc
ccc
3(1) ( ) ( )[ ] 0817
2
16 ≠+−+− ctjxctjxc under the constraint 513 ccc =
3(2) ( ) 02
2
716 ≠−+− cctjxc under the constraint ��
�
�−=
2
51
354
ccccc
4 ( )),( txuy under the constraint 01 =c tjx 1−
5(1) 0ln
2431
0
≠++− cctjxf
under the constraints
00 ≠f and 02 04
11 ≠= fcefg
5(2) ( ) 0413 ≠+− ctjxc under the constraints ≠12 gc 00 =f
6(1a) ( ) 02413 ≠−+− fctjxc under the constraint 20 =f
6(1b) ( ) 02
/2
4130 ≠−+− fctjxc
f under the constraints
00 ≠f and ( )( )122
002
0
31
1
0
−−= fff
cfg
f
6(2) ( )023
14 ≠−−fec
tjxc under the constraints 002 =≠ fc and 0
2
411 ≠= cfg
7 098722 ≠++ −
cececxcxc

100
Table 4. The rows below list the defining ODEs for the functions ( ),),( txuy the
functional forms of ),( txh connected with group (II) case (2) and group (IV) in table 3.
Cases 2(2) and 4 refer to group (II) case (2) and group (IV) respectively.
Case ( ) 0,,,, )4( =′′′′′′ yyyyyA
2(2) 0)()( 5
2 ≠=′′′ cuyuy
4 ( ) ( ) 0)()()()()()( 1
)4( =′′−′′′′′+ uyguyuyuyfuyuyf
with ( ) 0)( 1 ==′ guyf not occurring and ( ) 0)( ≠uyf
4.4 CONCLUDING REMARKS
Classical symmetry analysis of partition (4.2) of the thin film equation (4.1) led to the
addition of six symmetry-enhancing constraints. These resulted in travelling waves being
the only similarity solutions available for system (4.2) and the thin film equation (4.1)
under the conditions on ,0)( ≠hf )(hg and )(hj relating to groups (I)-(VI). This
situation arose since 0)()( =′=′ hjhg in the conditions on groups (I)-(VI), causing
equation (4.2)1 to generate a travelling wave solution of velocity .01 ≠j
By Mathematica [54], we attempted to solve equations (4.17) and (4.29), the ODEs
relating respectively to cases 2(2) and 4 in table 4. Via the ‘independent variable is
missing’ method, we noted equation (4.17) to be reducible to a second order equation
from which exact solutions are not recoverable. Attempting to solve the ODE (4.29) for
special cases of ,0))(( ≠uyf we found exact solutions for ODE (4.29) elusive.
The Lie classical analysis of partition (4.3) of the thin film equation (4.1) led to the
addition of one symmetry-enhancing constraint. This gave rise to steady state solutions
as the only similarity solutions retrievable for system (4.3) and thin film equation (4.1)
under the conditions on ,0)( ≠hf )(hg and )(hj associated with group (VII). This
situation directly resulted from the nature of system (4.3) and the need for consistency in
the invariant surface condition (4.42)3 .
As each of the systems (4.2) and (4.3) produced a different type of solution, we clearly
see that the class of solution generated depends on the form of the individual partition of
the thin film equation (4.1). The inclusion of nontrivial functions in an enlarged system
resulting from the partitioning of thin film equation (4.1) might lead to more diverse
symmetry groups and solutions for thin film equation (4.1). We explore this avenue in
chapter 6 of this thesis.

101
CHAPTER 5
NON-CLASSICAL SYMMETRY-ENHANCING
CONSTRAINTS FOR THE
THIN FILM EQUATION
5.1 INTRODUCTION
Via the method of non-classical symmetry-enhancing constraints, we derive symmetry
groups for the thin film equation (2.1) given by
[ ] ;0)()()( =++−∂
∂txxxxx hhhjhhghhf
x (5.1)
where .0)( ≠hf
The technique of non-classical symmetry-enhancing constraints is so termed as it
involves using the non-classical procedure to augment the method of symmetry-
enhancing constraints presented and developed by Goard and Broadbridge [29].
Saccomandi considered this approach [47].
From the viewpoint of this method, we considered two partitions of the thin film
equation (5.1). These yielded new non-classical symmetry groups and generate the
respective systems (4.2) and (4.3), namely
( ) ,0)()(2
=′−+ xxt hhghhjh [ ] ;0)()( =−∂
∂xxxxx hhghhf
x (5.2)
and
,0)()( =+− txxxxxx hhhghhf ( ) .0)()()(2
=+′−′xxxxxx hhjhhghhhf (5.3)
We apply the restrictions
(i) ,0)( ≠hf
(ii) 0)()( =′= hfhg does not occur,
(iii) 0)()( ==′ hjhg does not occur;
to system (5.2) to prevent th and xxxxh vanishing. On system (5.3), we impose the
condition 0)( ≠′ hf with restrictions (i) and (iii) to prevent xxxh and xxxxh disappearing.

102
We consider the one-parameter )(ε Lie group of general infinitesimal transformations in
,x t and ,h namely
( ) ( )( ) ( )( ) ( );,,
,,,
,,,
2
1
2
1
2
1
εεζ
εεη
εεξ
Ohtxhh
Ohtxtt
Ohtxxx
++=
++=
++=
(5.4)
preserving systems (5.2) and (5.3).
Thus if ),,( txh φ= then from ),,( 111 txh φ= evaluating the expansion of ε∂
∂ 1h at 0=ε
leads to the invariant surface condition
).,,(),,(),,( htxt
hhtx
x
hhtx ζηξ =
∂
∂+
∂
∂ (5.5)
The solutions of invariant surface condition (5.5) are functional forms of the similarity
solutions for systems (5.2) and (5.3).
The following section contains a brief description of the technique of non-classical
symmetry-enhancing constraints. This involves using the non-classical method to obtain
the symmetry groups leaving systems (5.2) and (5.3) invariant. Details of the non-
classical procedure feature in Bluman and Cole [16].
5.2 THE METHOD OF NON-CLASSICAL SYMMETRY-
ENHANCING CONSTRAINTS
Chapter 4 of this thesis includes the description of symmetry-enhancing constraints
presented in Goard and Broadbridge [29]. As new non-classical symmetry groups arise
from systems (5.2) and (5.3), we may consider symmetry-enhancing constraints to be
added to the thin film equation (5.1).
The method of symmetry-enhancing constraints requires dividing the equation of interest
into a larger system of PDEs before applying the classical procedure to this system to
recover its Lie classical groups [29]. Should this system generate Lie groups other than
those admitted by the original single equation (and which are not special cases of groups
admitted by the original equation), we may consider a symmetry-enhancing constraint to
be added to the original equation.

103
The technique of non-classical symmetry-enhancing constraints consists of applying the
non-classical procedure to the system in question to obtain its non-classical groups.
Should this system yield such groups other than those admitted by the original single
equation (and which are not special cases of groups admitted by the original equation), a
symmetry-enhancing constraint may be considered to be added to the original equation.
Accordingly, we apply this procedure to systems (5.2) and (5.3), briefly describing it for
system (5.2). The process is identical for system (5.3).
We begin applying the non-classical method by introducing for transformations (5.4) the
terms ( )htxA ,, and ( )htxB ,, defined as
( ) ( )( )
,,,
,,,,
htx
htxhtxA
η
ζ= ( ) ( )
( );
,,
,,,,
htx
htxhtxB
η
ξ= (5.6)
so that the invariant surface condition (5.5) becomes
.x
hBA
t
h
∂
∂−=
∂
∂ (5.7)
To obtain non-trivial transformations, we require .0),,( ≠htxη
The non-classical method uses relation (5.7) to express all derivatives of h with respect
to t in terms of derivatives of h with respect to .x In the invariance requirements
determined for systems (5.2) and (5.3) via the classical procedure in chapter 4 of this
thesis, these new expressions then replace all derivatives of h with respect to t so that
the left-hand side of each invariance requirement depends on h only via h itself and
derivatives of h with respect to .x
As we express all derivatives of h with respect to t in terms of derivatives of h with
respect to ,x fewer derivatives of h occur in each resulting invariance requirement than
is the case for the classical method. Hence, fewer restrictions apply to the non-classical
group generators ( )htxA ,, and ( )htxB ,, than to the classical group generators ( ),,, htxξ
( )htx ,,η and ( )htx ,,ζ when equating to zero the coefficients of all derivatives of h and
the sum of all remaining terms not involving derivatives of h in each invariance
requirement. This enables the non-classical procedure to generalise the classical method.
Following the replacements mentioned, setting to zero the coefficients of all derivatives
of h and the sum of all remaining terms not involving derivatives of h within the
invariance requirement of system (5.2) generates the determining equations

104
,0=hB ,0=+ hhhh AA ηη ,0)( =′hhhg η ,0)( =′
hhhhg η ,0)( =′hhhhhg η
,0)()( =′′hhghf η [ ] [ ] ,0)()( =+++ xtxt hjAAhjA ηηη [ ] ,0)(
2=′
hhg η
[ ]{ } ,0)(2)()( =′+−′xh hghjBhg ηη [ ] [ ] ,0)()()()( =−+− xxxxxxxxxxxx hghfAAhgAhf ηηη
( ) [ ]{ } ,0)()(322)( =′′−−−−+−′ hgAAhjBABhg htxhx ηηηηη
[ ] [ ] [ ] ,0)(2)()()(2)()( =′−+−+′−−−′xxtxtx hgAhjBhjAhgBBhjhjA ηηηη
,0)(
)(4
)(
)(64 =�
�
���
� ′++
′+− xxhxxxxh
hf
hfAA
hf
hfBA ηη
η [ ]Bhj −)( ,0
)(
)(2 =�
�
���
� ′+ hhhhh
hf
hfηη
( ) ��
���
�−
′++−+
′+− xhxxxxxxhxhxxxxxxxxxxxxh
hf
hg
hf
hfAAB
hf
hgA
hf
hfBA ηηη
η )(
)(2
)(
)(42
)(
)(
)(
)(4
,0)(
)()(=�
�
���
�−
−+ xxxxxx
hf
hgBhjηη
η
( ) ��
���
�−
′−�
�
���
� ′++−
′+ xxxxxxxxhxxhhxxxxxhxxhh
hf
hghg
hf
hfABA
hf
hfA ηη
ηηη
η )(
)()(
)(
)(2
33
)(
)(6
,0)(
)(2
)(
)(4
)(=�
�
���
�−
′+
−+ xhxxxxxxh
hf
hg
hf
hfBhjηηη
η
( ) ,0)(
2)(
)(4
)(
)(4 =
−+�
�
���
� ′++−
′+ xxhxhxhhxxxhxhh
Bhj
hf
hfABA
hf
hfA η
ηηη
η (5.8)
��
���
�−
′+
−+�
�
���
� ′++
′+ hhxxhxxhhxhhxhhhxhhxhhh
hf
hg
hf
hfBhj
hf
hfAA
hf
hfA ηηη
ηηη
η )(
)(
)(
)(36
)(
)(
)(34
)(
)(34
,0)(
)(4
)(
)(2
)(=�
�
���
� ′−−
′+ xxxxxxhxh
hf
hf
hf
hghgηηη
η
( ) ,0)(
)(4
)(
)(4
)(
)(
)(
)(
)(4
)(
)(=
′+�
�
���
� ′+
−+
′−�
�
���
� ′+−
′
η
ηηη
ηη
η x
xxh
h
hxhf
hfB
hf
hfBhj
hf
hfA
hf
hf
dh
dAAB
hf
hf
,0)(
)(4
)()(2 =�
�
���
� ′+
−+�
�
���
�′−+ xhxhh
xxhhhh
hhhhf
hfBhjhgAA ηη
ηη
η
η
η [ ] ,0)( =− hhBhj η
,0)(
)(34
)(
)(
)(
)(
)(=�
�
���
� ′+
−+�
�
���
� ′++
′+ xhhxhhhhhhhhhhhhhhhhh
hf
hfBhj
hf
hfAA
hf
hfA ηη
ηηη
η
[ ] [ ] ,04)(
)()()(4
)(
)()( =�
�
���
�+
′′−−+
′− xhxhhh
hf
hfhgBhj
hf
hfBhj ηηηη
[ ]Bhj −)( ,0)(
)(=�
�
���
� ′+ hhhhhhh
hf
hfηη .06
)(
)(
)(
)(246 =+�
�
���
�−−−
η
ηxxhxxxxxxh A
hf
hg
dh
dAB
hf
hgBA
Via a process similar to that for system (5.2) and following the replacements mentioned,
equating to zero the coefficients of all derivatives of h and the sum of all remaining
terms not involving derivatives of h in the invariance requirement of system (5.3) yields
the determining equations

105
,0=hhA ,0=hB ,0)(
)(=�
�
���
�
′
′
hf
hg
dh
dB hη ,0
)(
)(
)(
)(=�
�
���
�−
′
′
hf
hg
hf
hgB hη
( ) ,04)(
)(46
)(
)()()()( 2 =
++
′−−
′++−
η
ηη xx
xhxxxxxxxxt
BBAA
hf
hfAB
hf
hjhfAhfAhgA
( ) ( ) ABhf
hfBABhgBA
hf
hgBAhf txhxxxxxhxxxxxxxh
)(
)(2)(64
)(
)(4)(
′+−−+�
�
���
�−
′
′+−
,0)(
)()(4 =
��
��
��
���
�
′−−−+ xxxh
hf
hj
dh
dhfBBA
Bηηηη
η
,0)(
)(
)(
)(4
)(
)(
)(
)(246 =�
�
���
�
′
′−−�
�
���
�−−−
hf
hg
hf
hgB
hf
hg
dh
dAB
hf
hgBA x
xxxxxxhη
η (5.9)
,0)(
)()(
)(
)()( =
��
��
��
���
�
′+−�
�
���
�
′
′
hf
hj
dh
dhfBB
hf
hg
dh
dhBf hx ηη
( ) ,0)(
)(3
)(
)(
)(
)(=�
�
���
�
′+−
′+
′
′−
hf
hj
dh
dAAB
hf
hjA
hf
hgA hxxxxx
.0)(
)(
)(
)(23 =�
�
���
�
′
′−
′
′−−
hf
hg
dh
dAB
hf
hgBA xxxxxxh
All subscripts in systems (5.8) and (5.9) represent partial differentiation with ,x t and h
as independent variables. Throughout this chapter, primes denote differentiation with
respect to the argument indicated.
Systems (5.8) and (5.9) enable recovery of all symmetries and corresponding conditions
on ,0)( ≠hf )(hg and )(hj for the respective systems (5.2) and (5.3) under
transformations (5.4) via the non-classical procedure.
Inspection of systems (5.8) and (5.9) reveals an interesting departure from conventional
non-classical group construction owing to the presence of the term ( ) 0,, ≠htxη and its
derivatives in these systems. Such terms do not usually feature in the equations
determining the non-classical groups of a system comprising one or more equations. All
distinct symmetries arising from systems (5.8) and (5.9) and extending beyond the
confines of non-classical symmetries derived for the thin film equation (5.1) occur under
specific conditions on ,0),,( ≠htxη rendering these symmetries hybrids of classical and
non-classical symmetries.
System (5.2) generates one new symmetry group extending beyond the confines of
groups retrievable via the non-classical procedure for the thin film equation (5.1). By a
similar process, we obtain twenty-eight new such groups for system (5.3). These new

106
groups enhance the symmetries of the thin film equation (5.1). We may therefore
consider symmetry-enhancing constraints added to the thin film equation (5.1).
The following pages feature a description of each of these groups, a brief mention of the
special cases arising for each such group and the derivation of similarity solutions for
systems (5.2) and (5.3) associated with each group where applicable. Solutions of
systems (5.2) and (5.3) are also solutions to the thin film equation (5.1).
Although groups (XI)-(XVIII) and (XXII)-(XXIV) occurring for system (5.3) yield no
valid similarity solutions, we list them since they extend beyond the confines of groups
derived by applying the non-classical procedure to the thin film equation (5.1).
GROUP (I)
Under the conditions ,0)( 0
1 ≠= hfefhf 1)( ghg = and ,0)( 1 ≠= jhj system (5.2)
admits symmetry group (I) given by
,0),,( =htxA [ ]
,)(
4)(),,(
0
01
tf
tfjhtxB
α
α += ( ) ;0)(),,( 2 ≠+= chthtx αη (5.10)
where ,00 ≠f ,01 ≠f ,01 ≠j 2c and 1g are arbitrary constants with 02 ≠+ ch while
0)( ≠tα is an arbitrary function of .t
A special case of group (5.10) occurs and is as follows.
Case (1) The case of group (5.10) with 0)( 3 ≠= ctα arises under the conditions
,0)(5
4)(
)(
1 ≠
=−
dscsj
sjc
h
efhf 1)( ghg = and 0)( ≠hj is an arbitrary function of h where
,03 ≠c ,04 ≠c ,01 ≠f 5c and 1g are arbitrary constants with .0)( 5 ≠− chj
Similarity Solutions
Group (5.10), system (5.2) and the invariant surface condition (5.7) imply
,01 =+ xt hjh ( ) ,01010 =−+ xxxxxxxxxx
hfhghhfhef ;01 =xhj (5.11)
where ,00 ≠f ,01 ≠f 01 ≠j and 1g are arbitrary constants.
As 01 ≠j forces 0=xh in equation (5.11)3 , requiring 0=th in equation (5.11)1 ,
system (5.11) admits only the constant solution. Hence under transformations (5.4) and

107
the conditions ,0)( 0
1 ≠= hfefhf 1)( ghg = and ,0)( 1 ≠= jhj the similarity solution of
system (5.2) and the thin film equation (5.1) in connection with group (5.10) is the
constant solution.
GROUP (II)
Under the conditions ,0)( ≠hf 0)()( 1 ≠= hfghg and [ ] )()()( 1
1
0 hfjdssfjhj
h
′���
�
���
�+=
−
are arbitrary functions of ,h system (5.3) admits symmetry group (II), namely
,0),,( =htxA ,0)(),,( ≠= thtxB α [ ]
;0)(),,( 0)()(4
)(
≠= +
′−
jtt
xt
ethtxαα
α
βη (5.12)
where ,01 ≠g 0j and 1j are arbitrary constants while 0)( ≠tα and 0)( ≠tβ are
arbitrary functions of t with .0)( 0 ≠+ jtα Furthermore, 0)( ≠hf is an arbitrary
function of h with .0)( ≠′ hf
Similarity Solutions
Group (5.12), system (5.3) and the invariant surface condition (5.7) give
[ ] ,0)( 1
1
01 =���
�
���
�++−
−jdssfjhghh
h
xxxxx ( ) ,0)( 1 =+− txxxxxx hhghhf ;0)( =+ xt hth α
(5.13)
where ,01 ≠g 0j and 1j are arbitrary constants, 0)( ≠tα is an arbitrary function of t
with 0)( 0 ≠+ jtα and 0)( ≠hf is an arbitrary function of h with .0)( ≠′ hf
Via the method in [24], we find the general solution of equation (5.13)3 to be
;)(),( uytxh = (5.14)
where 0)( ≠tα is an arbitrary function of t and )(uy is an arbitrary function of
.)( −=t
dssxu α
Substituting result (5.14) into equation (5.13)1 gives rise to the cases
(1) ,0)( =′ uy (2) [ ] .0)()()( 1
1
01 =++′−′′′ −
jdssfjuyguy
y

108
Case (1) 0)( =′ uy
Under the constraint ,0)( =′ uy equations (5.13)1 and (5.13)2 vanish and system (5.13)
admits only constant solutions.
Case (2) [ ] 0)()()( 1
1
01 =++′−′′′ −
jdssfjuyguy
y
Together with the constraint on this case, relations (5.14) and (5.13)2 force .0)( =′ uy
Similarly to case (1), only constant solutions arise for system (5.13).
Cases (1) and (2) reflect that under transformations (5.4) and the conditions ,0)( ≠hf
0)()( 1 ≠= hfghg and [ ] )()()( 1
1
0 hfjdssfjhj
h
′���
�
���
�+=
− are arbitrary functions of ,h
the only similarity solution retrievable for system (5.3) and thin film equation (5.1) in
association with group (5.12) is the constant solution.
GROUP (III)
Subject to the conditions ( ) ,0)( 0
21 ≠+=f
fhfhf ( ) 0)( 0
21 ≠+=f
fhghg and ,0)( =hj
system (5.3) admits symmetry group (III) given by
( ) ,0)(),,( 2 ≠+= fhthtxA α ,0)(),,( 1 ≠= tchtxB α
[ ][ ] ;0)(),,(
21
20
)(4
)()(
≠=
+′−x
tc
tft
ethtxα
αα
βη
(5.15)
where ,01 ≠c ,00 ≠f ,01 ≠f 01 ≠g and 2f are arbitrary constants with 02 ≠+ fh
while 0)( ≠tα and 0)( ≠tβ are arbitrary functions of .t
Two special cases of group (5.15) emerge and are as follows.
Case (1) The case of group (5.15) with 0)( 2 ≠= ctα occurs under the conditions
( ) ,0)( 0
21 ≠+=f
fhfhf ( ) 2210)( gfhghg
f++= and 0)( =hj where ,02 ≠c ,00 ≠f
,01 ≠f ,01 ≠g 2f and 2g are arbitrary constants with .02 ≠+ fh
Case (2) The case of group (5.15) with 01
)(20
≠+
−=ctf
tα appears under the
conditions ( ) ,0)( 0
21 ≠+=f
fhfhf ( ) 0
21)(f
fhghg += and ( ) 0)( 0
21 ≠+=f
fhjhj
where ,00 ≠f ,01 ≠f ,01 ≠j ,2c 2f and 1g are arbitrary constants with
( )( ) .0202 ≠++ ctffh

109
Similarity Solutions
Group (5.15), system (5.3) and the invariant surface condition (5.7) give
( ) ,00 =− xxxxx hghh ( ) ( ) ,0021
0 =+−+ txxxxxx
fhhghfhf
(5.16)
( ) ;0)()( 21 ≠+=+ fhthtch xt αα
where ,01 ≠c ,00 ≠f ,01 ≠f ,01
1
0 ≠=f
gg 01 ≠g and 2f are arbitrary constants with
02 ≠+ fh while 0)( ≠tα is an arbitrary function of .t
Since 0=xh forces 0=th in equation (5.16)2 , rendering equation (5.16)3 inconsistent,
0≠xh is a requirement. Consequently, equation (5.16)1 forces ,00 ≠= xxxx hgh giving
0=th in equation (5.16)2 . System (5.16) then simplifies to give
,0)(),( ≠= xytxh ,01
)(
)(
12
≠=+
′
cfxy
xy ;0)()( 0 ≠′=′′′ xygxy (5.17)
where ,01 ≠c ,01 ≠f ,01
1
0 ≠=f
gg 01 ≠g and 2f are arbitrary constants while
0)( ≠′ xy owing to the requirement .0≠xh
Directly solving equation (5.17)2 and substituting its general solution into equation
(5.17)3 generates the constraint .02
1
1
1 ≠=c
fg Subsequently, under transformations (5.4)
and the conditions ( ) ,0)( 0
21 ≠+=f
fhfhf ( ) 0)( 0
21 ≠+=f
fhghg and 0)( =hj with
the constraint ,02
1
1
1 ≠=c
fg the similarity solution of system (5.3) and the thin film
equation (5.1) in conjunction with group (5.15) is the steady state solution
;0),( 221 ≠−= fectxh
c
x
(5.18)
where ,01 ≠c ,02 ≠c 01 ≠f and 2f are arbitrary constants.

110
GROUP (IV)
Under conditions ,0)( 0
1 ≠= hfefhf 0)( 0
2
11 ≠= hfecfhg and ,)( 0
1
hfejhj = system
(5.3) admits symmetry group (IV), namely
( ) ,0)(),,( 11
4 ≠−= − xcxcecethtxA α ,0)(),,( 2 ≠= tchtxB α
(5.19)
( )[ ]
;0)(4
)(
4exp)(),,(
2
2
4
21
0 11 ≠��
���
� ′−+= −
xtc
tece
cc
fthtx
xcxc
α
αβη
where ,01 ≠c ,02 ≠c ,00 ≠f ,01 ≠f 4c and 1j are arbitrary constants with
011
4 ≠− − xcxcece while 0)( ≠tα and 0)( ≠tβ are arbitrary functions of .t
Similarity Solutions
Group (5.19), system (5.3) and the invariant surface condition (5.7) give
,010
12
1 =���
����
�+−
ff
jhchh xxxxx ( ) ,0
2
110 =+− txxxxxx
hfhhchef
(5.20)
( ) ;0)()( 11
42 ≠−=+ − xcxc
xt ecethtch αα
where ,01 ≠c ,02 ≠c ,00 ≠f ,01 ≠f 4c and 1j are arbitrary constants with
011
4 ≠− − xcxcece while 0)( ≠tα is an arbitrary function of .t
Since 0=xh forces 0=th in equation (5.20)2 , rendering equation (5.20)3 inconsistent,
0≠xh is a requirement. Hence 10
12
1ff
jhch xxxx −=− in equation (5.20)1 , causing 0=th
in equation (5.20)2 . System (5.20) reduces to give
,0)(),( ≠= xytxh ,0 )( 11
42 ≠−=′ − xcxcecexyc ;)()(
10
12
1ff
jxycxy −=′−′′′ (5.21)
where ,01 ≠c ,02 ≠c ,00 ≠f ,01 ≠f 4c and 1j are arbitrary constants with
.011
4 ≠− − xcxcece
Directly solving equation (5.21)2 and substituting its general solution into equation
(5.21)3 generates the constraint .01 =j Thus under transformations (5.4) and the
conditions ,0)( 0
1 ≠= hfefhf 0)( 0
2
11 ≠= hfecfhg and
hfejhj 0
1)( = with the constraint

111
,01 =j the similarity solution of system (5.3) and the thin film equation (5.1) in
conjunction with group (5.19) is the steady state solution
;0),( 87611 ≠++= −
cecectxhxcxc
(5.22)
where ,01 ≠c ,02 ≠c ,01
21
6 ≠=cc
c ,4c 21
47
cc
cc = and 8c are arbitrary constants such
that .011
4 ≠− − xcxcece
The conditions on )(hg and )(hj associated with groups (5.15) and (5.19) have the
similar form 0)()()( 2 =≠= hjhfghg with 02 ≠g an arbitrary constant. Under such
conditions on )(hg and )(hj where 0),,( ≠htxA in the group concerned, the only
similarity solutions retrievable for system (5.3) and the thin film equation (5.1) are
steady state solutions, of which solution (5.22) is illustrative. Solution (5.18) is a special
case of solution (5.22) with .074 == cc
GROUP (V)
Under conditions ,0)( 0
1 ≠= hfefhf 0)( 0
2
11 ≠= hfecfhg and ,)( 0
1
hfejhj = system
(5.3) yields symmetry group (V), namely
( ) ,0)(),,( 13211 ≠+−= −
cececthtxAxcxcα ,0)(),,( 4 ≠= tchtxB α
(5.23)
( )[ ]
;0)(4
)(
4exp)(),,(
2
4
132
41
0 11 ≠��
���
� ′−++= −
xtc
txcecec
cc
fthtx
xcxc
α
αβη
where ,01 ≠c ,04 ≠c ,00 ≠f ,01 ≠f ,2c 3c and 1j are arbitrary constants with
013211 ≠+− −
cececxcxc
while 0)( ≠tα and 0)( ≠tβ are arbitrary functions of .t
A special case of group (5.23) arises and is as follows.
Case (1) The case of group (5.23) with 032 == cc occurs under the conditions
,0)( 0
1 ≠= hfefhf 0)( =hg and 0)( 0
1 ≠= hfejhj where ,00 ≠f 01 ≠f and 01 ≠j are
arbitrary constants.

112
Similarity Solutions
Group (5.23), system (5.3) and the invariant surface condition (5.7) imply
,010
12
1 =���
����
�+−
ff
jhchh xxxxx ( ) ,0
2
110 =+− txxxxxx
hfhhchef
(5.24)
( ) ;0)()( 132411 ≠+−=+ −
cececthtchxcxc
xt αα
where 0)( ≠tα is an arbitrary function of t while ,01 ≠c ,04 ≠c ,00 ≠f ,01 ≠f ,2c
3c and 1j are arbitrary constants such that .013211 ≠+− −
cececxcxc
Since 0=xh leads to 0=th in equation (5.24)2 , rendering equation (5.24)3 inconsistent,
we require .0≠xh Accordingly, 10
12
1ff
jhch xxxx −=− in equation (5.24)1 , causing
0=th in equation (5.24)2 . System (5.24) then simplifies to give
,0)(),( ≠= xytxh ,0)( 132411 ≠+−=′ −
cececxycxcxc
;)()(10
12
1ff
jxycxy −=′−′′′
(5.25)
where ,01 ≠c ,04 ≠c ,00 ≠f ,01 ≠f ,2c 3c and 1j are arbitrary constants with
.013211 ≠+− −
cececxcxc
Directly solving equation (5.25)2 and substituting its general solution into equation
(5.25)3 yields the constraint .04
3
110
1 ≠=c
cffj Hence under transformations (5.4) and the
conditions ,0)( 0
1 ≠= hfefhf 0)( 0
2
11 ≠= hfecfhg and
hfejhj 0
1)( = with the constraint
,04
3
110
1 ≠=c
cffj the similarity solution of system (5.3) and the thin film equation (5.1)
in connection with group (5.23) is the steady state solution
;0),( 1098711 ≠+++= −
cxcecectxhxcxc
(5.26)
where ,01 ≠c ,04 ≠c ,04
1
9 ≠=c
cc ,2c ,3c ,
41
2
7cc
cc =
41
3
8cc
cc = and 10c are arbitrary
constants with .013211 ≠+− −
cececxcxc

113
GROUP (VI)
Under the conditions ,0)()( 0
21 ≠+= ffhfhf 0)()( 0
2
2
11 ≠+= ffhcfhg and ,0)( =hj
system (5.3) admits symmetry group (VI), namely
( ) ,0)(),,( 21 ≠+= −
fhethtxAxcα ,0
)(),,( 1
1
≠−= − xce
c
thtxB
α
(5.27)
( )
[ ];0
)(4
)(
4
4exp)(),,( 1
2
01 ≠��
���
� ′+
−= xc
et
tx
fcthtx
α
αβη
where 0)( ≠tα and 0)( ≠tβ are arbitrary functions of t while ,01 ≠c ,00 ≠f 01 ≠f
and 2f are arbitrary constants with .02 ≠+ fh
Similarity Solutions
Group (5.27), system (5.3) and the invariant surface condition (5.7) imply
( ) ,02
1 =− xxxxx hchh ( ) ,0)(2
1210 =+−+ txxxxxx
fhhchfhf
(5.28)
( ) ;0)()(
2
1
11 ≠+=− −−fhethe
c
th
xc
x
xc
t αα
where ,01 ≠c ,00 ≠f 01 ≠f and 2f are arbitrary constants with 02 ≠+ fh while
0)( ≠tα is an arbitrary function of .t
As 0=xh gives 0=th in equation (5.28)2 , rendering equation (5.28)3 inconsistent, we
require .0≠xh Accordingly, 02
1 ≠= xxxx hch in equation (5.28)1 , forcing 0=th in
equation (5.28)2 . System (5.28) then simplifies to give
,0)(),( ≠= xytxh 0,)(
)(1
2
≠−=+
′c
fxy
xy ;0)()(
2
1 ≠′=′′′ xycxy (5.29)
where 01 ≠c and 2f are arbitrary constants while 0)( ≠′ xy as .0≠xh
Directly solving equation (5.29)2 , we find its general solution identically satisfies
equation (5.29)3. Consequently under transformations (5.4) and the conditions
,0)()( 0
21 ≠+= ffhfhf 0)()( 0
2
2
11 ≠+= ffhcfhg and ,0)( =hj the similarity solution
of system (5.3) and the thin film equation (5.1) in connection with group (5.27) is the
steady state solution

114
;0),( 231 ≠−= −
fectxhxc
(5.30)
where ,01 ≠c 03 ≠c and 2f are arbitrary constants.
Solutions (5.30) and (5.18) are equivalent and arise under equivalent conditions on
,0)( ≠hf )(hg and ).(hj
GROUP (VII)
Under the conditions ,0)()( 0
21 ≠+= ffhfhf 0)()( 0
2
2
11 ≠+= ffhcfhg and ,0)( =hj
system (5.3) admits symmetry group (VII), namely
( )( ) ,0)(),,( 221 ≠++= fhcethtxAxcα ( ) ,0
)(),,( 3
1
1 ≠+= cec
thtxB
xcα
(5.31)
( )[ ][ ][ ]
[ ][ ] ;0)(),,(
2
202
3
123
23023
1
)(
)()(
4)(4
)(4)(
2
1
3 ≠���
����
� +=
−′−−−+′
xt
tfct
c
ctc
tcfcct
xc
ec
cethtx α
ααα
αα
βη
where 0)( ≠tα and 0)( ≠tβ are arbitrary functions of t while ,01 ≠c ,03 ≠c ,00 ≠f
,01 ≠f 2c and 2f are arbitrary constants with .02 ≠+ fh
Similarity Solutions
Group (5.31), system (5.3) and the invariant surface condition (5.7) give
( ) ,02
1 =− xxxxx hchh ( ) ,0)(2
1210 =+−+ txxxxxx
fhhchfhf
(5.32)
( ) ( )( ) ;0)()(
223
1
11 ≠++=++ fhcethcec
th
xc
x
xc
t αα
where 0)( ≠tα is an arbitrary function of t while ,01 ≠c ,03 ≠c ,00 ≠f ,01 ≠f 2c
and 2f are arbitrary constants with .02 ≠+ fh

115
Since 0=xh forces 0=th in equation (5.32)2 , rendering equation (5.32)3 inconsistent,
we require .0≠xh Hence 02
1 ≠= xxxx hch in equation (5.32)1 , causing 0=th in
equation (5.32)2 . System (5.32) simplifies to give
,0)(),( ≠= xytxh 0,)(
)(
3
21
21
1
≠+
+=
+
′
ce
cec
fxy
xyxc
xc
;0)()(2
1 ≠′=′′′ xycxy (5.33)
where ,01 ≠c ,03 ≠c 2c and 2f are arbitrary constants while 0)( ≠′ xy owing to the
requirement .0≠xh
By the method in [48], we find the general solution of equation (5.33)3 to be
;0)( 65411 ≠++= −
cececxyxcxc
(5.34)
where ,01 ≠c ,4c 5c and 6c are arbitrary constants with .011
54 ≠− − xcxcecec
Substituting result (5.34) into equation (5.33)2 generates the cases
(1) ,0524 ==≠ ccc ,2436 fccc −=
(2) ,054 =≠ cc ,23 cc = ,26 fc −=
(3) ,04 ≠c ,23 cc −= ,2
245 ccc = .2 2426 fccc −−=
Case (1) ,0524 ==≠ ccc 2436 fccc −=
Result (5.34) and relations (5.33)1 and (5.33)2 imply that under transformations (5.4) and
the conditions ( ) ,0)( 0
21 ≠+=f
fhfhf ( ) 0)( 0
2
2
11 ≠+=f
fhcfhg and ,0)( =hj the
similarity solution of system (5.3) and the thin film equation (5.1) in connection with
group (5.31) and the constraints 0524 ==≠ ccc and 2436 fccc −= is the steady state
solution
;0),( 641 ≠+= cectxhxc
(5.35)
where ,01 ≠c ,03 ≠c ,04 ≠c 2436 fccc −= and 2f are arbitrary constants.
Solutions (5.35) and (5.18) are equivalent and occur under equivalent conditions on
,0)( ≠hf )(hg and ).(hj

116
Case (2) ,054 =≠ cc ,23 cc = 26 fc −=
Result (5.34) and equations (5.33)1 and (5.33)2 reflect that under transformations (5.4)
and the conditions ,0)()( 0
21 ≠+= ffhfhf 0)()( 0
2
2
11 ≠+= ffhcfhg and ,0)( =hj
the similarity solution of system (5.3) and the thin film equation (5.1) in association with
group (5.31) and the constraints ,054 =≠ cc 23 cc = and 26 fc −= is the steady state
solution
;0),( 241 ≠−= fectxhxc (5.36)
where ,01 ≠c 04 ≠c and 2f are arbitrary constants.
Solutions (5.36) and (5.18) are equivalent and emerge under equivalent conditions on
,0)( ≠hf )(hg and ).(hj
Case (3) ,04 ≠c ,23 cc −= ,2
245 ccc = 2426 2 fccc −−=
Result (5.34) and relations (5.33)1 and (5.33)2 indicate that under transformations (5.4)
and the conditions ,0)()( 0
21 ≠+= ffhfhf 0)()( 0
2
2
11 ≠+= ffhcfhg and ,0)( =hj
the similarity solution of system (5.3) and the thin film equation (5.1) in conjunction
with group (5.31) and the constraints ,04 ≠c ,23 cc −= 2
245 ccc = and 2426 2 fccc −−=
is the steady state solution
( ) ;0),( 6
2
2411 ≠++= −
cecectxhxcxc
(5.37)
where ,01 ≠c ,04 ≠c ,2c 2426 2 fccc −−= and 2f are arbitrary constants.
Solutions (5.37) and (5.22) are equivalent.

117
GROUP (VIII)
Subject to conditions ,0)()( 0
21 ≠+= ffhfhf 0)( =hg and ( ) ,0)(
1
210 ≠+=
−ffhjhj
system (5.3) yields symmetry group (VIII), namely
( ) ,0)(),,( 2 ≠+= fhthtxA α ( ) ,03
)(),,( 1 ≠+= cx
thtxB
α
(5.38)
( )[ ]
[ ] ;0)(),,( 2
20
)(4
)(3
4)(3
1 ≠+=��
��
��
���
�−+′−
t
tft
cxthtx α
αα
βη
where ,00 ≠f ,01 ≠f ,01 ≠j 1c and 2f are arbitrary constants with ( )( ) 021 ≠++ fhcx
while 0)( ≠tα and 0)( ≠tβ are arbitrary functions of .t
Similarity Solutions
Group (5.38), system (5.3) and the invariant surface condition (5.7) imply
,010
1 =���
����
�+
ff
jhh xxxx ,0)( 0
21 =++ txxxx
fhhfhf
(5.39)
( ) ( ) ;0)(3
)(21 ≠+=++ fhthcx
th xt α
α
where ,00 ≠f ,01 ≠f ,01 ≠j 1c and 2f are arbitrary constants with ( )( ) 021 ≠++ fhcx
while 0)( ≠tα is an arbitrary function of .t
Since 0=xh leads to 0=th in equation (5.39)2 , rendering equation (5.39)3 inconsistent,
we require .0≠xh Accordingly 010
1 ≠−=ff
jhxxx in equation (5.39)1 , causing 0=th in
equation (5.39)2 . System (5.39) then simplifies to give
,0)(),( ≠= xytxh 0,3
)(
)(
12
≠+
=+
′
cxfxy
xy ;0)(
10
1 ≠−=′′′ff
jxy (5.40)
where ,00 ≠f ,01 ≠f ,01 ≠j 1c and 2f are arbitrary constants with 01 ≠+ cx and
0)( ≠′ xy owing to the requirement .0≠xh
We directly solve equation (5.40)2 , substituting its general solution into equation (5.40)3.
Consequently, under transformations (5.4) and the conditions ,0)()( 0
21 ≠+= ffhfhf
0)( =hg and ( ) ,0)(1
210 ≠+=
−ffhjhj the similarity solution of system (5.3) and the
thin film equation (5.1) in association with group (5.38) is the steady state solution

118
( ) ;06
),( 2
3
1
10
1 ≠−+−= fcxff
jtxh (5.41)
where ,00 ≠f ,01 ≠f ,01 ≠j 1c and 2f are arbitrary constants with .01 ≠+ cx
Bernoff and Witelski also obtained an exact polynomial similarity solution when
studying the special case of the thin film equation (5.1) with hhf =)( and
,0)()( == hjhg using linear stability analysis to demonstrate the linear stability of the
source-type similarity solutions of this equation [9].
GROUP (IX)
Under the conditions ,0)()( 0
21 ≠+= ffhfhf 0)()( 0
2
2
11 ≠+= ffhcfhg and ,0)( =hj
system (5.3) yields symmetry group (IX), namely
( ) ,02
1)(4
)(),,( 22
2
2 111 ≠+���
�
���
���
���
�−+�
��
����
�−= −−
fhec
tec
ethtxAxcxcxc κα
,02
1)(
4
)(),,( 111 2
1
2
22
1
≠��
���
�++�
��
����
�++= −− xcxcxc
ec
c
te
cce
c
thtxB
κα (5.42)
[ ][ ]
( )����
�
�
����
�
�
++
′−′
�����
�
�
�����
�
�
++
+
=
+′−
)(22)(
)()(2
)()()()(
exp
)(
)(
2
2)(),,(
2
)(4
)()(
2
2
1
2
20
1
1
tcet
tt
tttt
t
tce
ce
thtxxc
t
tft
xc
xc
κα
ακ
καακ
α
κβη
κ
κκ
;02
1)(4
)(4
4
21
2
221
0
111 ≠���
�
���
���
���
�++�
��
����
�++×
−
−−
f
xcxcxce
ctce
ccetc κα
where ,0)( ≠tα 0)( ≠tβ and 0)( ≠tκ are arbitrary functions of t while ,01 ≠c
,00 ≠f ,01 ≠f 2c and 2f are arbitrary constants with .02 ≠+ fh

119
Similarity Solutions
Group (5.42), system (5.3) and the invariant surface condition (5.7) imply
( ) ,02
1 =− xxxxx hchh ( ) ,0)(2
1210 =+−+ txxxxxx
fhhchfhf
(5.43)
=���
�
���
���
���
�++�
��
����
�+++ −−
x
xcxcxc
t hec
c
te
cce
c
th 111
21
)(
4
)( 2
1
2
22
1
κα
( ) ;02
1)(4
)( 22
2
2 111 ≠+���
�
���
���
���
�−+�
��
����
�− −−
fhec
tec
etxcxcxc κα
where ,01 ≠c ,00 ≠f ,01 ≠f 2c and 2f are arbitrary constants with 02 ≠+ fh while
0)( ≠tα and 0)( ≠tκ are arbitrary functions of .t
Since 0=xh leads to 0=th in equation (5.43)2 , rendering equation (5.43)3 inconsistent,
we require .0≠xh Accordingly 02
1 ≠= xxxx hch in equation (5.43)1 , causing 0=th in
equation (5.43)2 . System (5.43) then simplifies to give
,0)(),( ≠= xytxh ,0)()(2
1 ≠′=′′′ xycxy
(5.44)
;0
21)(
4)(
21)(
4)(
)(
)(
111
111
2
2
22
2
2
2
1
2
≠
��
���
�++�
��
����
�++
��
���
�−+�
��
�
���
�−
=+
′
−−
−−
xcxcxc
xcxcxc
ec
tec
cet
ec
tec
et
cfxy
xy
κα
κα
where ,01 ≠c 2c and 2f are arbitrary constants, 0)( ≠tα and 0)( ≠tκ are arbitrary
functions of t and 0)( ≠′ xy owing to the requirement .0≠xh
By the method in [48], we solve equation (5.44)2 , substituting its general solution into
equation (5.44)3. Hence under transformations (5.4) and the conditions
,0)()( 0
21 ≠+= ffhfhf 0)()( 0
2
2
11 ≠+= ffhcfhg and ,0)( =hj the similarity solution
for system (5.3) and the thin film equation (5.1) in association with group (5.42) is the
steady state solution
;0),( 65411 ≠++= −
cecectxhxcxc
(5.45)

120
where ,01 ≠c ,04 ≠c ,2c ,4
2
245
ccc = 2426 fccc −= and 2f are arbitrary constants
with .011
54 ≠− − xcxcecec
Solutions (5.45) and (5.22) are equivalent.
GROUP (X)
Under the conditions ,0)()( 0
21 ≠+= ffhfhf 0)()( 0
2
2
11 ≠+= ffhcfhg and ,0)( =hj
system (5.3) admits symmetry group (X), namely
( ) ,04
)(),,( 2
2
2 11 ≠+���
����
�−= −
fhec
ethtxAxcxcα ,0
4
)(),,( 11
2
22
1
≠���
����
�++= − xcxc
ec
cec
thtxB
α
(5.46)
( )[ ]
[ ];0
)(2
4
2)(4)(
exp2
)(),,(22
22
012
4
2
1
10
1 ≠
����
�
�
����
�
�
��
���
�+
��
���
�+−−′
��
���
�+=
−
tc
e
cextfct
cethtx
xc
xcf
xc
α
αα
βη
where ,01 ≠c ,00 ≠f ,01 ≠f 2c and 2f are arbitrary constants with 02 ≠+ fh while
0)( ≠tα and 0)( ≠tβ are arbitrary functions of .t
Similarity Solutions
Group (5.46), system (5.3) and the invariant surface condition (5.7) give
( ) ,02
1 =− xxxxx hchh ( ) ,0)(2
1210 =+−+ txxxxxx
fhhchfhf
(5.47)
( ) ;04
)(4
)(2
2
2
2
22
1
1111 ≠+���
����
�−=�
��
����
�+++ −−
fhec
ethec
cec
th
xcxc
x
xcxc
t αα
where ,01 ≠c ,00 ≠f ,01 ≠f 2c and 2f are arbitrary constants with 02 ≠+ fh while
0)( ≠tα is an arbitrary function of .t
As 0=xh forces 0=th in equation (5.47)2 , rendering equation (5.47)3 inconsistent,
0≠xh is a requirement. Hence 02
1 ≠= xxxx hch in equation (5.47)1 , causing 0=th in
equation (5.47)2 . System (5.47) accordingly simplifies to give
,0)(),( ≠= xytxh ,0)()(2
1 ≠′=′′′ xycxy ;0
2
2
)(
)(
22
2
22
2
1
211
11
≠
+
−=
+
′
−
−
xc
xc
xc
xc
ece
ecec
fxy
xy (5.48)

121
where ,01 ≠c 2c and 2f are arbitrary constants and 0)( ≠′ xy since .0≠xh
Via the method in [48], we solve equation (5.48)2 and substitute its general solution into
equation (5.48)3.
Systems (5.48) and (5.44) generate identical solutions for system (5.3) and thin film
equation (5.1) in tandem with the respective groups (5.46) and (5.42). Both groups occur
under identical conditions on ,0)( ≠hf )(hg and ).(hj
Hence under transformations (5.4) and the conditions ,0)()( 0
21 ≠+= ffhfhf
0)()( 0
2
2
11 ≠+= ffhcfhg and ,0)( =hj the similarity solution for system (5.3) and thin
film equation (5.1) in association with group (5.46) is the steady state solution (5.45).
GROUP (XI)
Under conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj
system (5.3) yields symmetry group (XI), namely
( ) ,0)(),,( 23
4
2
1111 ≠+�
��
����
�−=
−
fhecethtxAxctjc
xcα
,03
2)(),,( 1
3
4
2
1
1111 ≠+�
��
����
�+=
−
jecec
thtxB
xctjcxcα
(5.49)
4/1
13
4
2
1 3
2)()(),,(
1111
−
−
���
�
���
�+���
����
�+= jece
c
tthtx
xctjcxcα
βη
( ) [ ]
( ) [ ]
( ) [ ]
;0
3)()(
9
3)()(
9
113
4
22
2112
1
111
111
111
)(9
)(8
)(3
2)(
111
3
4
2
2
2
112
1
111
3
4
2
2
2
112
1
≠
������
�
�
������
�
�
��
���
�+−
��
��
−
��
���
�++
��
��
−
×
��
��
�
���
−
��
���
�+′
tjc
etcjc
ct
tjctc
xctjc
xctjc
jcetcetc
jcc
jcetcetc
jcc αα
αα
αα
αα
where ,01 ≠c ,01 ≠f ,01 ≠j 2c and 2f are arbitrary constants such that
( ) [ ] ( ) 0)(9
23
42
2
2
11 11
≠+��
��
− fhetcjc tjc
α while 0)( ≠tα and 0)( ≠tβ are arbitrary
functions of .t

122
Similarity Solutions
Group (5.49), system (5.3) and the invariant surface condition (5.7) imply
( )
,03
2
21
12
1 =��
���
�
++−
fhf
jhchh xxxxx ( ) ,0)(
2
1
3
21 =+−+ txxxxxx hhchfhf
(5.50)
( ) ;0)(3
2)(2
3
4
213
4
2
1
1111
1111 ≠+�
��
����
�−=
���
�
���
�+���
����
�++
−−
fhecethjecec
th
xctjcxc
x
xctjcxc
t αα
where 0)( ≠tα is an arbitrary function of t while ,01 ≠c ,01 ≠f ,01 ≠j 2c and 2f are
arbitrary constants with ( ) [ ] ( ) .0)(
92
3
42
2
2
11 11
≠+��
��
− fhetcjc tjc
α
Since 0=xh gives 0=th in equation (5.50)2 , rendering equation (5.50)3 inconsistent,
we require ,0≠xh forcing ( )
03
2
21
12
1 ≠+
−=−fhf
jhch xxxx in equation (5.50)1.
Accordingly, system (5.50) simplifies to give
,03
21 ≠−= xt hjh
( ),0
32
21
12
1 ≠+
−=−fhf
jhch xxxx ;0
1111
1111
3
4
2
3
4
21
2
≠
+
−=
+ −
−
xctjcxc
xctjcxc
x
ece
ecec
fh
h
(5.51)
where ,01 ≠c ,01 ≠f ,01 ≠j 2c and 2f are arbitrary constants with .0≠xh
Directly solving equation (5.51)3 and substituting its general solution into equation
(5.51)1 yields a further equation directly solving which generates the result
;0),( 2
3
2
7
3
2
6
1111
≠−+=��
���
�−−�
�
���
�−
fecectxhtjxctjxc
(5.52)
where ,01 ≠c ,06 ≠c ,01 ≠j ,2c 627 ccc = and 2f are arbitrary constants.
Substituting result (5.52) into equation (5.51)2 gives rise to the contradiction .01 =j
Hence under transformations (5.4) and the conditions ,0)()( 3
21 ≠+= fhfhf
0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj no valid similarity solution arises for
system (5.3) and the thin film equation (5.1) in association with group (5.49).

123
GROUP (XII)
Under the conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and
,0)( 1 ≠= jhj system (5.3) admits symmetry group (XII), namely
( ) ,0),,( 23
4
23
2
5
1111
11
≠+���
����
�−=
−−
fheceechtxAxctjc
xctjc
,03
2),,( 1
3
4
23
2
1
5 1111
11
≠+���
����
�+=
−−
jeceec
chtxB
xctjcxc
tjc
(5.53)
;03
2)(),,(
4/1
13
4
23
2
1
5 1111
11
≠���
�
���
�+���
����
�+=
−
−−
jeceec
cthtx
xctjcxc
tjc
βη
where 0)( ≠tβ is an arbitrary function of t while ,01 ≠c ,02 ≠c ,05 ≠c ,01 ≠f
01 ≠j and 2f are arbitrary constants with ( )
09 2
2
112
5 ≠=c
jcc and .02 ≠+ fh
Similarity Solutions
Group (5.53), system (5.3) and the invariant surface condition (5.7) give
( )
,03
2
21
12
1 =��
���
�
++−
fhf
jhchh xxxxx ( ) ,0)(
2
1
3
21 =+−+ txxxxxx hhchfhf
(5.54)
( ) ;03
22
3
4
23
2
513
4
23
2
1
5 1111
111111
11
≠+���
����
�−=
���
�
���
�+���
����
�++
−−−−
fheceechjeceec
ch
xctjcxc
tjc
x
xctjcxc
tjc
t
where ,01 ≠c ,02 ≠c ,05 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants such that
( )0
9 2
2
112
5 ≠=c
jcc and .02 ≠+ fh
As 0=xh gives 0=th in equation (5.54)2 , rendering equation (5.54)3 inconsistent,
0≠xh is a requirement, forcing ( )
03
2
21
12
1 ≠+
−=−fhf
jhch xxxx in equation (5.54)1.
System (5.54) then simplifies to give
,03
21 ≠−= xt hjh
( ),0
32
21
12
1 ≠+
−=−fhf
jhch xxxx ;0
1111
1111
3
4
2
3
4
21
2
≠
+
−=
+ −
−
xctjcxc
xctjcxc
x
ece
ecec
fh
h
(5.55)
where ,01 ≠c ,02 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants with .0≠xh

124
System (5.55) is a special case of system (5.51) with 02 ≠c and so ultimately leads to
the contradiction .01 =j Groups (5.53) and (5.49) associated with the respective systems
(5.55) and (5.51) are subject to identical conditions on ,0)( ≠hf )(hg and ).(hj
Hence under transformations (5.4) and the conditions ,0)()( 3
21 ≠+= fhfhf
0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj no valid similarity solution occurs for
system (5.3) and the thin film equation (5.1) in connection with group (5.53).
GROUP (XIII)
Under conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj
system (5.3) yields symmetry group (XIII), namely
( ) ,0)(),,( 23
2
2
111
≠+=−
fhtechtxAxctjc
α ,03
2)(1),,( 1
3
2
1
2 111
≠+���
����
�+−=
−
jtec
chtxB
xctjc
α
(5.56)
;03
2)(1)(),,(
11
11
1111
3
2)()(4
3
2)()()(
13
2
1
23
2)()(4
)(
≠���
�
���
�+�
��
����
�+−=
��
���
�+
��
���
�++′
−
−��
���
�+
′−
jttc
jttct
xctjcjtt
xt
jtec
cethtx
αα
ααα
αα
α
αβη
where ,01 ≠c ,02 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants with 02 ≠+ fh
while 0)( ≠tα and 0)( ≠tβ are arbitrary functions of t with .03
2)( 1 ≠+ jtα
Similarity Solutions
Group (5.56), system (5.3) and the invariant surface condition (5.7) imply
( )
,03
2
21
12
1 =��
���
�
++−
fhf
jhchh xxxxx ( ) ,0)(
2
1
3
21 =+−+ txxxxxx hhchfhf
(5.57)
( ) ;0)(3
2)(1 2
3
2
213
2
1
2 111111
≠+=���
�
���
�+�
��
����
�+−+
−−
fhtechjtec
ch
xctjc
x
xctjc
t αα
where 0)( ≠tα is an arbitrary function of t while ,01 ≠c ,02 ≠c ,01 ≠f 01 ≠j and 2f
are arbitrary constants with ( ) .03
2)( 12 ≠��
���
�++ jtfh α

125
Since 0=xh gives 0=th in equation (5.57)2 , rendering equation (5.57)3 inconsistent,
0≠xh is a requirement. Thus ( )
03
2
21
12
1 ≠+
−=−fhf
jhch xxxx in equation (5.57)1 and
system (5.57) accordingly simplifies to give
,03
21 ≠−= xt hjh
( ),0
32
21
12
1 ≠+
−=−fhf
jhch xxxx ;0
13
2
2
3
2
21
2 111
111
≠
−
−=
+ −
−
cec
ecc
fh
h
xctjc
xctjc
x
(5.58)
where ,01 ≠c ,02 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants with .0≠xh
Via the method in [24] we solve equation (5.58)1 , substituting its general solution into
equations (5.58)2 and (5.58)3 and obtaining the relations
,0)(),( ≠= uytxh ,0)(
)(
12
21
21
1
≠−
−=
+
′−
−
cec
ecc
fuy
uyuc
uc
(5.59)
[ ]
;0)(3
)()(2
21
12
1 ≠+
−=′−′′′fuyf
juycuy
where ,01 ≠c ,02 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants and tjxu 13
2−=
with 0)( ≠′ uy since .0≠xh
Directly solving equation (5.59)2 and substituting its general solution into equation
(5.59)3 generates the contradiction .01 =j Hence under transformations (5.4) and the
conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj no
valid similarity solution arises for system (5.3) and the thin film equation (5.1) in
conjunction with group (5.56).

126
GROUP (XIV)
Under conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj
system (5.3) admits symmetry group (XIV), namely
( ) ,0),,( 23
2
2
111
≠+=−
fhechtxAxctjc
,0),,(111
3
2
1
2 ≠−=− xctjc
ec
chtxB
(5.60)
;0)(),,( 4
1
≠=x
c
ethtx βη
where 0)( ≠tβ is an arbitrary function of t while ,01 ≠c ,02 ≠c ,01 ≠f 01 ≠j and 2f
are arbitrary constants with .02 ≠+ fh
Similarity Solutions
Group (5.60), system (5.3) and the invariant surface condition (5.7) imply
( )
,03
2
21
12
1 =��
���
�
++−
fhf
jhchh xxxxx ( ) ,0)(
2
1
3
21 =+−+ txxxxxx hhchfhf
(5.61)
( ) ;023
2
23
2
1
2 111111
≠+=−−−
fhechec
ch
xctjc
x
xctjc
t
where ,01 ≠c ,02 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants with .02 ≠+ fh
As 0=xh gives 0=th in equation (5.61)2 , rendering equation (5.61)3 inconsistent, we
require ,0≠xh causing ( )
03
2
21
12
1 ≠+
−=−fhf
jhch xxxx in equation (5.61)1 . System
(5.61) then simplifies to give
,03
21 ≠−= xt hjh
( ),0
32
21
12
1 ≠+
−=−fhf
jhch xxxx ;0
3
211
3
2
2
3
2
21
2 111
111
≠
+
−=
+ −
−
jcec
ecc
fh
h
xctjc
xctjc
x
(5.62)
where ,01 ≠c ,02 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants with .0≠xh
By the method in [24], we solve equation (5.62)1 , substituting its general solution into
equations (5.62)2 and (5.62)3 and obtaining the relations

127
,0)(),( ≠= uytxh ,0
3
2)(
)(
112
21
2 1
1
≠
+
−=
+
′
−
−
jcec
ecc
fuy
uy
uc
uc
(5.63)
[ ]
;0)(3
)()(2
21
12
1 ≠+
−=′−′′′fuyf
juycuy
where ,01 ≠c ,02 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants and tjxu 13
2−=
with 0)( ≠′ uy since .0≠xh
Directly solving equation (5.63)2 and substituting its general solution into equation
(5.63)3 yields the contradiction .01 =j Hence under transformations (5.4) and the
conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj no
valid similarity solution occurs for system (5.3) and the thin film equation (5.1) in
connection with group (5.60).
GROUP (XV)
Under conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj
system (5.3) yields symmetry group (XV), namely
( ) ,0)(),,( 23
2
43
2111111
≠+���
����
�−=
+−−
fhecethtxAtjcxctjcxc
α
,03
2)(
)(),,( 1
2
13
2
43
2
1
111111
≠++���
����
�+=
+−−
jtc
cece
c
thtxB
tjcxctjcxc
αα
(5.64)
4/1
1
2
13
2
43
2
1 3
2)(
)()(),,(
111111
−
+−−
���
�
���
�++�
��
����
�+= jt
c
cece
c
tthtx
tjcxctjcxc
αα
βη
[ ] ( )
[ ] ( )
[ ] ( )
;0
3
2)(2)(
9
4)(
3
4)(
4
3
2)(2)(
9
4)(
3
4)(
4 211
2
3112
22
224
412
1
1
111
111
9
4)(
3
4)(
4)(4
)(
113
2
2
2
11
2
11
2
3
112
2
2
2
24
4
12
1
113
2
2
2
11
2
11
2
3
112
2
2
2
24
4
12
1
≠
��������������
�
�
��������������
�
�
������
�
�
������
�
�
��
���
�++
−��
��
++−
������
�
�
������
�
�
��
���
�++
+��
��
++−
×
��
��
�
���
++−
′
−
−
jctc
cjt
c
cccct
tc
tjcxc
tjcxc
jcettc
cc
jctc
cjt
c
cccc
jcettc
cc
jctc
cjt
c
cccc
ααα
α
αα
αα
αα
αα

128
where ,01 ≠c ,02 ≠c ,01 ≠f ,01 ≠j 4c and 2f are arbitrary constants with 02 ≠+ fh
while 0)( ≠tα and 0)( ≠tβ are arbitrary functions of t with 02)(3 121 ≠+ jctc α and
( )[ ] .04)(12)(492
1
2
2
2
1
3
121
22
24
4
1 ≠++− jcctccjtccc αα
Similarity Solutions
Group (5.64), system (5.3) and the invariant surface condition (5.7) generate relations
( ),0
32
21
12
1 =��
���
�
++−
fhf
jhchh xxxxx ( ) ,0)(
2
1
3
21 =+−+ txxxxxx hhchfhf
(5.65)
( ) ;0)(3
2)(
)(2
3
2
43
2
1
2
13
2
43
2
1
111111111111
≠+���
����
�−=
���
�
���
�++�
��
����
�++
+−−+−−
fhecethjtc
cece
c
th
tjcxctjcxc
x
tjcxctjcxc
t ααα
where ,01 ≠c ,02 ≠c ,01 ≠f ,01 ≠j 4c and 2f are arbitrary constants with 02 ≠+ fh
while 0)( ≠tα is an arbitrary function of t with .02)(3 121 ≠+ jctc α
Since 0=xh gives 0=th in equation (5.65)2 , rendering equation (5.65)3 inconsistent,
0≠xh is a requirement, causing equation (5.65)1 to give
( ).0
32
21
12
1 ≠+
−=−fhf
jhch xxxx System (5.65) then simplifies to give
,03
21 ≠−= xt hjh
( ),0
32
21
12
1 ≠+
−=−fhf
jhch xxxx
(5.66)
;02
13
2
43
2
2
3
2
43
2
7
2 111111
111111
≠
+���
����
�+
���
����
�−
=+ +−−
+−−
cecec
ecec
fh
h
tjcxctjcxc
tjcxctjcxc
x
where ,01 ≠c ,02 ≠c ,0217 ≠= ccc ,01 ≠f ,01 ≠j 4c and 2f are arbitrary constants
with .0≠xh
Via the method in [24], we solve equation (5.66)1 , substituting its general solution into
equations (5.66)2 and (5.66)3 and recovering the relations

129
,0)(),( ≠= uytxh ( )
( ),0
)(
)(2
142
47
211
11
≠++
−=
+
′
−
−
cecec
ecec
fuy
uy
ucuc
ucuc
(5.67)
[ ]
;0)(3
)()(2
21
12
1 ≠+
−=′−′′′fuyf
juycuy
where ,01 ≠c ,02 ≠c ,0217 ≠= ccc ,01 ≠f ,01 ≠j 4c and 2f are arbitrary constants,
tjxu 13
2−= and 0)( ≠′ uy since .0≠xh
Directly solving equation (5.67)2 and substituting its general solution into equation
(5.67)3 gives the contradiction .01 =j Hence under transformations (5.4) and the
conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj no
valid similarity solution arises for system (5.3) and the thin film equation (5.1) in tandem
with group (5.64).
GROUP (XVI)
Under the conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and
,0)( 1 ≠= jhj system (5.3) yields symmetry group (XVI), namely
( ) ,0),,( 23
22
53
2
2
111111
≠+���
����
�−=
+−−
fhecechtxAtjcxctjcxc
,02),,( 53
22
53
2
1
2 111111
≠���
����
�++=
+−−
cecec
chtxB
tjcxctjcxc
(5.68)
;02)(),,(
4/1
53
22
53
2111111
≠���
����
�++=
−+−−
cecethtxtjcxctjcxc
βη
where 0)( ≠tβ is an arbitrary function of t while ,01 ≠c ,02 ≠c ,05 ≠c ,01 ≠f 01 ≠j
and 2f are arbitrary constants with ( )( ) 063 52115211 ≠−− ccjcccjc and .02 ≠+ fh
Similarity Solutions
Group (5.68), system (5.3) and the invariant surface condition (5.7) give
( )
,03
2
21
12
1 =��
���
�
++−
fhf
jhchh xxxxx ( ) ,0)(
2
1
3
21 =+−+ txxxxxx hhchfhf
(5.69)
( ) ;02 23
22
53
2
253
22
53
2
1
2 111111111111
≠+���
����
�−=�
��
����
�+++
+−−+−−
fhecechcecec
ch
tjcxctjcxc
x
tjcxctjcxc
t

130
where ,01 ≠c ,02 ≠c ,05 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants with
( )( ) 063 52115211 ≠−− ccjcccjc and .02 ≠+ fh
As 0=xh gives 0=th in equation (5.69)2 , rendering equation (5.69)3 inconsistent, we
require ,0≠xh causing equation (5.69)1 to give ( )
.03
2
21
12
1 ≠+
−=−fhf
jhch xxxx
Correspondingly, system (5.69) simplifies to give
,03
21 ≠−= xt hjh ( ) ,0
3
2
2
1
12
1 ≠+−=−−
fhf
jhch xxxx
(5.70)
;0
913
22
53
2
2
3
22
53
2
21
2 111111
111111
≠
+���
����
�+
���
����
�−
=+ +−−
+−−
ccecec
ececc
fh
h
tjcxctjcxc
tjcxctjcxc
x
where ,01 ≠c ,02 ≠c ,05 ≠c ( )
,03
32
1
5211
9 ≠−−
=c
ccjcc ,01 ≠f 01 ≠j and 2f are
arbitrary constants with 06 5211 ≠− ccjc and .0≠xh
Via the method in [24], we solve equation (5.70)1 , substituting its general solution into
equations (5.70)2 and (5.70)3 and retrieving the relations
,0)(),( ≠= uytxh ( )
( ),0
)(
)(
91
2
52
2
521
211
11
≠++
−=
+
′
−
−
ccecec
ececc
fuy
uy
ucuc
ucuc
(5.71)
[ ] ;0)(3
)()(2
2
1
12
1 ≠+−=′−′′′ −fuy
f
juycuy
where ,01 ≠c ,02 ≠c ,05 ≠c ( )
,03
32
1
5211
9 ≠−−
=c
ccjcc ,01 ≠f 01 ≠j and 2f are
arbitrary constants with 06 5211 ≠− ccjc while tjxu 13
2−= and 0)( ≠′ uy owing to the
requirement .0≠xh
Directly solving equation (5.71)2 and substituting its general solution into equation
(5.71)3 gives the contradiction .01 =j Hence under transformations (5.4) and conditions
,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj no valid similarity
solution arises from system (5.3) and the thin film equation (5.1) in association with
group (5.68).

131
GROUP (XVII)
Under the conditions ,0)()( 3
21 ≠+= fhfhf 0)(36)( 3
2
2
1
52
1 ≠+���
����
�= fh
j
ccfhg and
,0)( 1 ≠= jhj system (5.3) admits symmetry group (XVII), namely
( ) ,0),,( 2
3
26
2
5
3
26
2
11
521
1
52
≠+��
�
�
��
�
�−=
��
���
�−�
�
���
�−±
fhecechtxAtjx
j
cctjx
j
cc�
,036
),,( 13
26
2
5
3
26
5
11
1
521
1
52
≠+��
�
�
��
�
�+±=
��
���
�−�
�
���
�−± j
ecec
jhtxB
tjxj
cctjx
j
cc�
(5.72)
;012
1)(),,(
4/1
3
26
2
5
3
26
5
11
521
1
52
≠��
��
�
���
−��
�
�
��
�
�+=
−
��
���
�−�
�
���
�−± tjx
j
cctjx
j
cc
ecec
thtx�
�βη
where 0)( ≠tβ is an arbitrary function of t while ,02 ≠c ,05 ≠c ,01 ≠f 01 ≠j and 2f
are arbitrary constants with .02 ≠+ fh
Similarity Solutions
Group (5.72), system (5.3) and the invariant surface condition (5.7) imply
( ) ,03
362
2
1
1
2
1
52 =��
�
�
��
�
�++��
�
����
�−
−fh
f
jh
j
cchh xxxxx
,036)(
2
1
523
21 =+��
�
�
��
�
�
���
����
�−+ txxxxxx hh
j
cchfhf (5.73)
( ) ;036
2
3
26
2
5
3
26
213
26
2
5
3
26
5
11
1
521
1
521
1
521
1
52
≠+��
�
�
��
�
�−=
��
��
�
���
+��
�
�
��
�
�+±+
��
���
�−�
�
���
�−±�
�
���
�−�
�
���
�−±
fhecechj
ecec
jh
tjxj
cctjx
j
cc
x
tjxj
cctjx
j
cc
t
��
where ,02 ≠c ,05 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants with .02 ≠+ fh
As 0=xh forces 0=th in equation (5.73)2 , rendering equation (5.73)3 inconsistent,
0≠xh is a requirement, causing equation (5.73)1 to give
( ).0
336
2
21
1
2
1
52 ≠+
−=���
����
�−
fhf
jh
j
cch xxxx System (5.73) then simplifies to give

132
,03
21 ≠−= xt hjh
( ),0
336
2
21
1
2
1
52 ≠+
−=���
����
�−
fhf
jh
j
cch xxxx
(5.74)
;0
36
13
26
2
5
3
26
5
1
3
26
2
5
3
26
2
2 11
521
1
52
11
521
1
52
≠
−��
�
�
��
�
�+±
��
�
�
��
�
�−
=+ �
�
���
�−�
�
���
�−±
��
���
�−�
�
���
�−±
jece
c
j
ecec
fh
h
tjxj
cctjx
j
cc
tjxj
cctjx
j
cc
x
�
�
where ,02 ≠c ,05 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants while .0≠xh
By the method in [24], we solve equation (5.74)1 , substituting its general solution into
equations (5.74)2 and (5.74)3 and recovering the relations
,0)(),( ≠= uytxh ,0
36
)(
)(
1
6
2
5
6
5
1
6
2
5
6
2
21
52
1
52
1
52
1
52
≠
−��
�
�
��
�
�+±
��
�
�
��
�
�−
=+
′
±
±
jece
c
j
ecec
fuy
uy
uj
ccu
j
cc
uj
ccu
j
cc
�
�
(5.75)
[ ] ;0)(3
)(36)(2
2
1
1
2
1
52 ≠+−=′���
����
�−′′′ −
fuyf
juy
j
ccuy
where ,02 ≠c ,05 ≠c ,01 ≠f 01 ≠j and 2f are arbitrary constants, tjxu 13
2−= and
0)( ≠′ uy since .0≠xh
Directly solving equation (5.75)2 and substituting its general solution into equation
(5.75)3 yields the contradiction .01 =j Hence under transformations (5.4) and the
conditions ,0)()( 3
21 ≠+= fhfhf 0)(36)( 3
2
2
1
52
1 ≠+���
����
�= fh
j
ccfhg and ,0)( 1 ≠= jhj
no valid similarity solution is retrievable for system (5.3) and the thin film equation (5.1)
in conjunction with group (5.72).

133
GROUP (XVIII)
Under conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj
system (5.3) admits symmetry group (XVIII), namely
( ) ,0),,( 2
3
2
4
3
2
2
1111
≠+���
�
���
�−=
��
�
�−−�
�
�
�−
fhecechtxAtjxctjxc
,0),,(1111
3
2
4
3
2
1
2 ≠���
�
���
�+=
��
�
�−−�
�
�
�− tjxctjxc
ecec
chtxB (5.76)
;0)(),,(
4/1
4
3
22
411
1
≠���
�
���
�+=
−
��
�
�−
ceethtxtjxcx
c
βη
where 0)( ≠tβ is an arbitrary function of t while ,01 ≠c ,02 ≠c ,01 ≠f ,01 ≠j 4c
and 2f are arbitrary constants with .02 ≠+ fh
Similarity Solutions
Group (5.76), system (5.3) and the invariant surface condition (5.7) imply
( ) ,03
2
2
1
12
1 =��
���
�++−
−fh
f
jhchh xxxxx ( ) ,0)(
2
1
3
21 =+−+ txxxxxx hhchfhf
(5.77)
( ) ;02
3
2
4
3
2
2
3
2
4
3
2
1
211111111
≠+���
�
���
�−=
���
�
���
�++
��
�
�−−�
�
�
�−�
�
�
�−−�
�
�
�−
fhecechecec
ch
tjxctjxc
x
tjxctjxc
t
where ,01 ≠c ,02 ≠c ,01 ≠f ,01 ≠j 4c and 2f are arbitrary constants with .02 ≠+ fh
As 0=xh gives 0=th in equation (5.77)2 , rendering equation (5.77)3 inconsistent,
0≠xh is a requirement. System (5.77) accordingly simplifies to give
,03
21 ≠−= xt hjh ( ) ,0
3
2
2
1
12
1 ≠+−=−−
fhf
jhch xxxx
(5.78)
;0
3
21
3
2
4
3
2
1
2
3
2
4
3
2
2
2 1111
1111
≠
−���
�
���
�+
���
�
���
�−
=+
��
�
�−−�
�
�
�−
��
�
�−−�
�
�
�−
jecec
c
ecec
fh
h
tjxctjxc
tjxctjxc
x
where ,01 ≠c ,02 ≠c ,01 ≠f ,01 ≠j 4c and 2f are arbitrary constants with .0≠xh

134
Via the method in [24], we solve equation (5.78)1 , substituting its general solution into
equations (5.78)2 and (5.78)3 and obtaining the relations
,0)(),( ≠= uytxh ( )
( ),0
3
2)(
)(
14
1
2
42
2 11
11
≠
−+
−=
+
′
−
−
jecec
c
ecec
fuy
uy
ucuc
ucuc
(5.79)
[ ] ;0)(3
)()(2
2
1
12
1 ≠+−=′−′′′ −fuy
f
juycuy
where ,01 ≠c ,02 ≠c ,01 ≠f ,01 ≠j 4c and 2f are arbitrary constants, tjxu 13
2−=
and 0)( ≠′ uy owing to the requirement .0≠xh
Directly solving equation (5.79)2 and substituting its general solution into equation
(5.79)3 leads to the contradiction .01 =j Hence under transformations (5.4) and the
conditions ,0)()( 3
21 ≠+= fhfhf 0)()( 3
2
2
11 ≠+= fhcfhg and ,0)( 1 ≠= jhj no
valid similarity solution occurs for system (5.3) and the thin film equation (5.1) in
connection with group (5.76).
GROUP (XIX)
Subject to conditions ,0)( 0
1 ≠= hfefhf 0)( =hg and ,0)( 0
1 ≠= hfejhj system (5.3)
yields symmetry group (XIX), namely
,02
)(),,( 43
2
2
3
10
1 ≠���
�
�+++−= cxcxcx
ff
jthtxA α ,0)(),,( ≠= xthtxB α
(5.80)
[ ][ ] ;0)(),,( 4824)(4
)(4)(032023
1
12
2
≠=++−
+′− x
fcx
fcx
f
j
t
tt
exthtx α
αα
βη
where ,00 ≠f ,01 ≠f ,01 ≠j ,2c 3c and 4c are arbitrary constants such that
02
43
2
2
3
10
1 ≠+++− cxcxcxff
j while 0)( ≠tα and 0)( ≠tβ are arbitrary functions of
.t

135
Similarity Solutions
Group (5.80), system (5.3) and the invariant surface condition (5.7) give the relations
,010
1 =���
�
�+
ff
jhh xxxx ,00
1 =+ txxxx
hfhhef
(5.81)
;02
)()( 43
2
2
3
10
1 ≠���
�
�+++−=+ cxcxcx
ff
jtxhth xt αα
where 0)( ≠tα is an arbitrary function of t while ,00 ≠f ,01 ≠f ,01 ≠j ,2c 3c and
4c are arbitrary constants such that .02
43
2
2
3
10
1 ≠+++− cxcxcxff
j
As 0=xh causes 0=th in equation (5.81)2 , rendering equation (5.81)3 inconsistent, we
require .0≠xh Consequently 010
1 ≠−=ff
jhxxx in equation (5.81)1 , forcing 0=th in
equation (5.81)2 . System (5.81) then simplifies to give
,0)(),( ≠= xytxh ,0)(10
1 ≠−=′′′ff
jxy ;0
2)( 4
32
2
10
1 ≠+++−=′x
ccxcx
ff
jxy
(5.82)
where ,00 ≠f ,01 ≠f ,01 ≠j ,2c 3c and 4c are arbitrary constants with
.02
432
2
10
1 ≠���
�
�+++− x
x
ccxcx
ff
j
Differentiating equation (5.82)3 twice with respect to x and substituting the result into
equation (5.82)2 generates the constraint .04 =c We directly solve equation (5.82)3
under this constraint. Therefore under transformations (5.4) and the conditions
,0)( 0
1 ≠= hfefhf 0)( =hg and ,0)( 0
1 ≠= hfejhj the similarity solution for system
(5.3) and thin film equation (5.1) in tandem with group (5.80) and the constraint 04 =c
is the steady state solution
;026
),( 113
223
10
1 ≠+++−= cxcxc
xff
jtxh (5.83)
where ,00 ≠f ,01 ≠f ,01 ≠j ,2c 3c and 11c are arbitrary constants with
.02
32
2
10
1 ≠++− cxcxff
j Solution (5.83) includes solution (5.41) as a special case
under the restriction .2 1
2
210
3j
cffc −=

136
GROUP (XX)
Under the conditions ,0)( 0
1 ≠= hfefhf 0)( =hg and ,0)( 0
1 ≠= hfejhj system (5.3)
admits symmetry group (XX), namely
[ ] ,02
)()(),,( 32
2
10
1 ≠���
�
�++−+= cxcx
ff
jtxthtxA γα ,0)()(),,( ≠+= txthtxB γα
(5.84)
[ ] [ ] [ ][ ]
[ ] ;0)()()(),,( 2
22
032023
1
1
)(4
)(4)()()()(4
)()()()(
4824≠+=
+′−+
′−′+++−
t
tttxtt
ttttx
fcx
fcx
f
j
txtethtx α
ααγαα
αγγα
γαβη
where ,0)( ≠tα 0)( ≠tβ and 0)( ≠tγ are arbitrary functions of t while ,00 ≠f
,01 ≠f ,01 ≠j 2c and 3c are arbitrary constants such that .02
32
2
10
1 ≠++− cxcxff
j
Similarity Solutions
Group (5.84), system (5.3) and the invariant surface condition (5.7) imply
,010
1 =���
�
�+
ff
jhh xxxx ,00
1 =+ txxxx
hfhhef
(5.85)
[ ] [ ] ;02
)()()()( 32
2
10
1 ≠���
�
�++−+=++ cxcx
ff
jtxthtxth xt γαγα
where 0)( ≠tα and 0)( ≠tγ are arbitrary functions of t while ,00 ≠f ,01 ≠f ,01 ≠j
2c and 3c denote arbitrary constants with .02
32
2
10
1 ≠++− cxcxff
j
Since 0=xh gives 0=th in equation (5.85)2 , rendering equation (5.85)3 inconsistent,
we require .0≠xh Hence 010
1 ≠−=ff
jhxxx in equation (5.85)1 , causing 0=th in
equation (5.85)2 . System (5.85) accordingly simplifies to give
,0)(),( ≠= xytxh ,0)(10
1 ≠−=′′′ff
jxy ;0
2)( 32
2
10
1 ≠++−=′ cxcxff
jxy (5.86)
where ,00 ≠f ,01 ≠f ,01 ≠j 2c and 3c are arbitrary constants such that
.02
32
2
10
1 ≠++− cxcxff
j
Directly solving equation (5.86)3 , we observe that differentiating it twice with respect to
x yields equation (5.86)2. Systems (5.86) and (5.82) (the latter under the constraint
04 =c ) generate identical solutions for system (5.3) and the thin film equation (5.1) in

137
tandem with the respective groups (5.84) and (5.80) (the latter under the constraint
04 =c ). Both groups occur under identical conditions on ,0)( ≠hf )(hg and ).(hj
Consequently under transformations (5.4) and conditions ,0)( 0
1 ≠= hfefhf 0)( =hg
and ,0)( 0
1 ≠= hfejhj the similarity solution for system (5.3) and the thin film equation
(5.1) in connection with group (5.84) is the steady state solution (5.83).
GROUP (XXI)
Under the conditions ,0)( 0
1 ≠= hfefhf 0)( =hg and ,0)( 0
1 ≠= hfejhj system (5.3)
yields symmetry group (XXI), namely
,02
)(),,( 32
2
10
1 ≠���
�
�++−= cxcx
ff
jthtxA α ,0)(),,( ≠= thtxB α
(5.87)
[ ][ ] ;0)(),,(
2
2032023
1
1
)(4
)()(
824≠=
′−++− x
t
ttfcx
fcx
f
j
ethtx α
αα
βη
where 0)( ≠tα and 0)( ≠tβ are arbitrary functions of t while ,00 ≠f ,01 ≠f ,01 ≠j
2c and 3c are arbitrary constants with .02
32
2
10
1 ≠++− cxcxff
j
Similarity Solutions
Group (5.87), system (5.3) and the invariant surface condition (5.7) give the relations
,010
1 =���
�
�+
ff
jhh xxxx ,00
1 =+ txxxx
hfhhef
(5.88)
;02
)()( 32
2
10
1 ≠���
�
�++−=+ cxcx
ff
jthth xt αα
where ,00 ≠f ,01 ≠f ,01 ≠j 2c and 3c are arbitrary constants such that
02
32
2
10
1 ≠++− cxcxff
j while 0)( ≠tα is an arbitrary function of .t
As 0=xh causes 0=th in equation (5.88)2 , rendering equation (5.88)3 inconsistent, we
require .0≠xh Hence 010
1 =≠−= txxx hff
jh in equations (5.88)1 and (5.88)2 , causing
system (5.88) to give

138
,0)(),( ≠= xytxh ,0)(10
1 ≠−=′′′ff
jxy ;0
2)( 32
2
10
1 ≠++−=′ cxcxff
jxy (5.89)
where ,00 ≠f ,01 ≠f ,01 ≠j 2c and 3c are arbitrary constants such that
.02
32
2
10
1 ≠++− cxcxff
j
Systems (5.89) and (5.86) are identical, thereby yielding equivalent similarity solutions,
the steady state solution (5.83), for system (5.3) and thin film equation (5.1) in
association with the respective groups (5.87) and (5.84), under transformations (5.4) and
conditions ,0)( 0
1 ≠= hfefhf 0)( =hg and .0)( 0
1 ≠= hfejhj
GROUP (XXII)
Under the conditions ( ) ,0)(3
21 ≠+= fhfhf 0)( =hg and ,0)( 1 ≠= jhj system (5.3)
admits symmetry group (XXII), namely
( ) ,0)(),,( 2 ≠+= fhthtxA α ,03
2
3
2)(),,( 121 ≠+�
�
�
�+−= jctjxthtxB α
(5.90)
[ ][ ]
;03
2
3
2)()(),,(
2
2
)(4
)()(
121 ≠��
���
�+��
�
�+−=
+′−
t
tt
jctjxtthtxα
αα
αβη
where 0)( ≠tα and 0)( ≠tβ are arbitrary functions of t while ,01 ≠f ,02 ≠f 01 ≠j
and 2c are arbitrary constants with .02 ≠+ fh
Similarity Solutions
Group (5.90), system (5.3) and the invariant surface condition (5.7) give
( ) ,03
2
2
1
1 =��
���
�++
−fh
f
jhh xxxx ( ) ,0
3
21 =++ txxxx hhfhf
(5.91)
( ) ;0)(3
2
3
2)( 2121 ≠+=�
�
���
�+��
�
�+−+ fhthjctjxth xt αα
where ,01 ≠f ,02 ≠f 01 ≠j and 2c are arbitrary constants with 02 ≠+ fh while
0)( ≠tα is an arbitrary function of .t
As 0=xh forces 0=th in equation (5.91)2 , rendering equation (5.91)3 inconsistent,
0≠xh is a requirement. System (5.91) accordingly gives

139
( )
,03
2
21
1 ≠+
−=fhf
jhxxx ,0
3
21 ≠−= xt hjh ;0
3
2
1
212
≠
+−
=+
ctjxfh
hx (5.92)
where ,01 ≠f ,02 ≠f 01 ≠j and 2c are arbitrary constants and .0≠xh
Using the method in [24], we solve equation (5.92)2 , substituting its general solution
into equations (5.92)1 and (5.92)3 and recovering the relations
,0)(),( ≠= uytxh ,01
)(
)(
22
≠+
=+
′
cufuy
uy
[ ];0
)(3)(
2
21
1 ≠+
−=′′′fuyf
juy (5.93)
where ,01 ≠f ,02 ≠f 01 ≠j and 2c are arbitrary constants, tjxu 13
2−= and 0)( ≠′ uy
owing to the requirement .0≠xh
Directly solving equation (5.93)2 and substituting its general solution into equation
(5.93)3 gives the contradiction .01 =j Thus under transformations (5.4) and conditions
( ) ,0)(3
21 ≠+= fhfhf 0)( =hg and ,0)( 1 ≠= jhj no valid similarity solution exists
for system (5.3) and the thin film equation (5.1) in tandem with group (5.90).
GROUP (XXIII)
Under the conditions ( ) ,0)(3
21 ≠+= fhfhf 0)( =hg and ,0)( 1 ≠= jhj system (5.3)
yields symmetry group (XXIII), namely
( ) ,03
2)(),,( 221 ≠+�
�
�
�+−= fhctjxthtxA α
,03
2
3
2
3
2
2
1)(),,( 1312
2
1 ≠+���
�
���
�+��
�
�−+�
�
�
�−= jctjxctjxthtxB α (5.94)
4/1
1312
2
13
2
3
2
3
2
2
1)()(),,(
−
�
��
�
��
+���
�
���
�+��
�
�−+�
�
�
�−= jctjxctjxtthtx αβη
( )
( )
[ ]
( )
;0
3
4)(2
3
2)(
3
4)(2
3
2)( 1
223
2/3
3
4)(24
)()(
1
2
2321
1
2
2321
≠
����
�
�
����
�
�
+−+��
�
�+−−
+−+��
�
�+−
×
+−
′−
−
jtcc
tti
jtccictjxt
jtccictjxtα
αα
αα
αα
where ,01 ≠f ,01 ≠j ,2c 3c and 2f are arbitrary constants such that 02 ≠+ fh while
0)( ≠tα and 0)( ≠tβ are arbitrary functions of t with ( ) .03
4)(2 1
2
23 ≠+− jtcc α

140
Similarity Solutions
Group (5.94), system (5.3) and the invariant surface condition (5.7) imply
( ) ,03
2
2
1
1 =��
���
�++
−fh
f
jhh xxxx ( ) ,0
3
21 =++ txxxx hhfhf
(5.95)
( ) ;03
2)(
3
2
3
2
3
2
2
1)( 2211312
2
1 ≠+��
�
�+−=
�
��
�
��
+���
�
���
�+��
�
�−+�
�
�
�−+ fhctjxthjctjxctjxth xt αα
where ,01 ≠f ,01 ≠j ,2c 3c and 2f are arbitrary constants while 0)( ≠tα is an
arbitrary function of t such that ( ) ( ) .03
4)(2 21
2
23 ≠+��
���
�+− fhjtcc α
As 0=xh causes 0=th in equation (5.95)2 , rendering equation (5.95)3 inconsistent, we
require .0≠xh System (5.95) then reduces to give
( )
,03
2
21
1 ≠+
−=fhf
jhxxx ,0
3
21 ≠−= xt hjh
(5.96)
;0
3
2
3
2
2
1
3
2
312
2
1
21
2
≠
+��
�
�−+�
�
�
�−
+−=
+ctjxctjx
ctjx
fh
hx
where ,01 ≠f ,01 ≠j ,2c 3c and 2f are arbitrary constants with .0≠xh
Via the method in [24], we solve equation (5.96)2 , substituting its general solution into
equations (5.96)1 and (5.96)3 and obtaining the relations
,0)(),( ≠= uytxh ,0
2
1)(
)(
32
2
2
2
≠
++
+=
+
′
cucu
cu
fuy
uy
[ ];0
)(3)(
2
21
1 ≠+
−=′′′fuyf
juy
(5.97)
where ,01 ≠f ,01 ≠j ,2c 3c and 2f are arbitrary constants, tjxu 13
2−= and 0)( ≠′ uy
owing to the requirement .0≠xh
Directly solving equation (5.97)2 and substituting its general solution into equation
(5.97)3 gives the contradiction .01 =j Thus under transformations (5.4) and conditions
( ) ,0)(3
21 ≠+= fhfhf 0)( =hg and ,0)( 1 ≠= jhj no valid similarity solution occurs
for system (5.3) and the thin film equation (5.1) in tandem with group (5.94).

141
GROUP (XXIV)
Under the conditions ( ) ,0)(3
21 ≠+= fhfhf 0)( =hg and ,0)( 1 ≠= jhj system (5.3)
admits symmetry group (XXIV), namely
( ) ,03
2),,( 2311 ≠+�
�
�
�+−= fhctjxchtxA ,0
3
2
2),,(
2
311 ≠�
�
�
�+−= ctjx
chtxB
(5.98)
;03
2
2)(),,(
4/12
311 ≠
���
�
���
���
�
�+−=
−
ctjxc
thtx βη
where ,01 ≠c ,01 ≠f ,01 ≠j 3c and 2f are arbitrary constants with 02 ≠+ fh while
0)( ≠tβ is an arbitrary function of .t
Similarity Solutions
Group (5.98), system (5.3) and the invariant surface condition (5.7) give
( ) ,03
2
2
1
1 =��
���
�++
−fh
f
jhh xxxx ( ) ,0
3
21 =++ txxxx hhfhf
(5.99)
( ) ;03
2
3
2
22311
2
311 ≠+�
�
�
�+−=�
�
�
�+−+ fhctjxchctjx
ch xt
where ,01 ≠c ,01 ≠f ,01 ≠j 3c and 2f are arbitrary constants while .02 ≠+ fh
Since 0=xh gives 0=th in equation (5.99)2 , rendering equation (5.99)3 inconsistent,
0≠xh is a requirement. System (5.99) accordingly simplifies to give
( )
,03
2
21
1 ≠+
−=fhf
jhxxx ,0
3
21 ≠−= xt hjh
(5.100)
;0
3
2
3
2
2
1
3
2
513
2
1
31
2
≠
+��
�
�−+�
�
�
�−
+−=
+ctjxctjx
ctjx
fh
hx
where ,01 ≠c ,01 ≠f ,01 ≠j ,3c 1
1
2
315
6
43
c
jccc
−= and 2f are arbitrary constants with
.0≠xh

142
By the method in [24], we solve equation (5.100)2 , substituting its general solution into
equations (5.100)1 and (5.100)3 and deriving the relations
,0)(),( ≠= uytxh ,0
2
1)(
)(
53
2
3
2
≠
++
+=
+
′
cucu
cu
fuy
uy
[ ];0
)(3)(
2
21
1 ≠+
−=′′′fuyf
juy
(5.101)
where ,01 ≠c ,01 ≠f ,01 ≠j ,3c 1
1
2
315
6
43
c
jccc
−= and 2f are arbitrary constants,
tjxu 13
2−= and 0)( ≠′ uy since .0≠xh
Directly solving equation (5.101)2 and substituting its general solution into equation
(5.101)3 leads to the contradiction .01 =j Consequently under transformations (5.4) and
conditions ( ) ,0)(3
21 ≠+= fhfhf 0)( =hg and ,0)( 1 ≠= jhj no valid similarity
solution arises for system (5.3) and the thin film equation (5.1) in tandem with group
(5.98).
GROUP (XXV)
Under the conditions ,0)( 0
1 ≠= hfefhf 0)( =hg and ,0)( 1 ≠= jhj system (5.3) yields
symmetry group (XXV), namely
,0)(),,( ≠= thtxA α ( ) ,0)(3
),,( 111
0 ≠++−= jctjxtf
htxB α
(5.102)
( )
[ ][ ]
;0)(3
)(),,(2
0
20
)(4
)()(3
111
0 ≠��
���
�++−=
+′−
tf
tft
jctjxtf
thtxα
αα
αβη
where ,00 ≠f ,01 ≠f 01 ≠j and 1c are arbitrary constants while 0)( ≠tα and
0)( ≠tβ are arbitrary functions of .t
A special case of group (5.102) occurs and is as follows.
Case (1) The case of group (5.102) with 02
3)(
30
≠+
=ctf
tα arises under the
conditions ,0)( 0
1 ≠= hfefhf 1)( ghg = and 0)( 1 ≠= jhj where ,00 ≠f ,01 ≠f
,01 ≠j 3c and 1g are arbitrary constants and .02 30 ≠+ ctf

143
Similarity Solutions
Group (5.102), system (5.3) and the invariant surface condition (5.7) give the relations
,00
10
1 =���
�
�+ − hf
xxxx eff
jhh ,00
1 =+ txxxx
hfhhef
(5.103)
( ) ;0)()(3
111
0 ≠=��
���
�++−+ thjctjxt
fh xt αα
where ,00 ≠f ,01 ≠f 01 ≠j and 1c are arbitrary constants while 0)( ≠tα is an
arbitrary function of .t
As 0=xh gives 0=th in equation (5.103)2 , rendering equation (5.103)3 inconsistent,
we require .0≠xh System (5.103) correspondingly reduces to give
,00
10
1 ≠−= − hf
xxx eff
jh ,01 ≠−= xt hjh
( );0
3
110
≠+−
=ctjxf
hx (5.104)
where ,00 ≠f ,01 ≠f 01 ≠j and 1c are arbitrary constants and .0≠xh
Via the method in [24], we solve equation (5.104)2 , substituting its general solution into
equations (5.104)1 and (5.104)3 and obtaining the equations
,0)(),( ≠= uytxh ( )
,03
)(10
≠+
=′cuf
uy ;0)()(
10
1 0 ≠−=′′′ − uyfe
ff
juy (5.105)
where ,00 ≠f ,01 ≠f 01 ≠j and 1c are arbitrary constants and tjxu 1−= with
.01 ≠+ cu
We directly solve equation (5.105)2 and substitute its general solution into equation
(5.105)3. Consequently, we find that under transformations (5.4) and the conditions
,0)( 0
1 ≠= hfefhf 0)( =hg and ,0)( 1 ≠= jhj the similarity solution for system (5.3)
and thin film equation (5.1) in connection with group (5.102) is the travelling wave of
velocity ,01 ≠j namely
;06
ln1
ln3
),(1
1
0
11
0
≠++−=f
j
fctjx
ftxh (5.106)
where ,00 ≠f ,01 ≠f 01 ≠j and 1c are arbitrary constants.

144
GROUP (XXVI)
Under the conditions ( ) ,0)( 0
21 ≠+=f
fhfhf 0)( =hg and ,0)( 1 ≠= jhj system (5.3)
admits symmetry group (XXVI), namely
( ) ,0)(),,( 2 ≠+= fhthtxA α ,011
)(3
),,( 1
0
0
21
0
00 ≠−
+���
�
�+
−−= j
f
fctj
f
fxt
fhtxB α
(5.107)
[ ][ ]
;011
)(3
)(),,(
20
20
)(4
)()(3
1
0
021
0
00 ≠��
���
� −+���
�
�+
−−=
+′−
tf
tft
jf
fctj
f
fxt
fthtx
α
αα
αβη
where ( ),3,1,00 ∉f ,01 ≠f ,01 ≠j 2c and 2f are arbitrary constants with 02 ≠+ fh
while 0)( ≠tα and 0)( ≠tβ are arbitrary functions of .t
Similarity Solutions
Group (5.107), system (5.3) and the invariant surface condition (5.7) give
( ) ,001
2
10
1 =��
���
�++
− f
xxxx fhff
jhh ( ) ,00
21 =++ txxxx
fhhfhf
(5.108)
( ) ;0)(11
)(3
21
0
021
0
00 ≠+=��
���
� −+���
�
�+
−−+ fhthj
f
fctj
f
fxt
fh xt αα
where ( ),3,1,00 ∉f ,01 ≠f ,01 ≠j 2c and 2f are arbitrary constants with 02 ≠+ fh
while 0)( ≠tα is an arbitrary function of .t
As 0=xh causes 0=th in equation (5.108)2 , rendering equation (5.108)3 inconsistent,
0≠xh is a requirement. System (5.108) accordingly gives
( )
,01
210
1
0
≠+
−=−fxxx
fhff
jh ,0
11
0
0 ≠−
−= xt hjf
fh
(5.109)
( )
;01
3
201002
≠+−−
=+ cftjfxffh
hx
where ( ),3,1,00 ∉f ,01 ≠f ,01 ≠j 2c and 2f are arbitrary constants and .0≠xh
By the method in [24], we solve equation (5.109)2 , substituting its general solution into
equations (5.109)1 and (5.109)3 and recovering the relations

145
,0)(),( ≠= uytxh ( )
,03
)(
)(
202
≠+
=+
′
cuffuy
uy
[ ];0
)()(
1
210
1
0
≠+
−=′′′−f
fuyff
juy
(5.110)
where ( ),3,1,00 ∉f ,01 ≠f ,01 ≠j 2c and 2f are arbitrary constants and
tjf
fxu 1
0
0 1−−= with .02 ≠+ cu
Directly solving equation (5.110)2 and substituting its general solution into equation
(5.110)3 yields the constraint .2
30 ≠f Hence under transformations (5.4) and the
conditions ( ) ,0)( 0
21 ≠+=f
fhfhf 0)( =hg and ,0)( 1 ≠= jhj the similarity solution
for system (5.3) and the thin film equation (5.1) in tandem with group (5.107) and the
constraint 2
30 ≠f is the travelling wave of velocity ,0
11
0
0 ≠−
jf
f namely
( )( )
;01
2333),( 2
3
21
0
0
1
001
2
0100
≠−���
�
�+
−−
���
�
���
�
−−−= fctj
f
fx
fff
fjtxh
ff
(5.111)
where ,3,2
3,1,00 �
�
�
�∉f ,01 ≠f ,01 ≠j 2c and 2f are arbitrary constants.
GROUP (XXVII)
Under the conditions ,0)( 0
1 ≠= hfefhf 1)( ghg = and ,0)( 0
1 ≠= hfejhj system (5.3)
yields symmetry group (XXVII), namely
,02
23
2),,(
2
612
10
113
2
2
3
10
1
≠+
++���
�
�−++−
=ft
ctgcxtff
jgcxcx
ff
j
htxA
,02
),,(2
7 ≠+
+=
ft
cxhtxB (5.112)
( ) ( )[ ]
( )( )
( );0)(),,( 2
12
8
32
7
48
36612362
21
1710211
112
71723102
171023
1
≠+=−+
+���
��� −−−+++−
ftf
jcffcgf
xtjgcjcccffxjcffcxj
cxethtx βη
where ,00 ≠f ,01 ≠f ,01 ≠j ,2c ,3c ,6c ,7c 2f and 1g are arbitrary constants with
( )( ) 02 27 ≠++ ftcx while 0)( ≠tβ is an arbitrary function of .t

146
Similarity Solutions
Group (5.112), system (5.3) and the invariant surface condition (5.7) imply
,010
1 =���
�
�+
ff
jhh xxxx ,011
0 =+− txxxxxx
hfhhghef
(5.113)
;02
23
2
2 2
612
10
113
2
2
3
10
1
2
7 ≠+
++���
�
�−++−
=+
++
ft
ctgcxtff
jgcxcx
ff
j
hft
cxh xt
where ,00 ≠f ,01 ≠f ,01 ≠j ,2c ,3c ,6c ,7c 2f and 1g are arbitrary constants such
that ( )( ) .02 27 ≠++ ftcx
Since 0=xh gives 0=th in equation (5.113)2 , rendering equation (5.113)3 inconsistent,
we require .0≠xh Equation (5.113)1 consequently yields ,010
1 ≠−=ff
jhxxx implying
;0)()()(6
),( 32
2
1
3
10
1 ≠+++−= txtxtxff
jtxh ααα (5.114)
where ,00 ≠f 01 ≠f and 01 ≠j are arbitrary constants while ),(1 tα )(2 tα and )(3 tα
are arbitrary functions of t with 0)()(22
21
2
10
1 ≠++− txtxff
jαα owing to the
requirement .0≠xh
Substituting result (5.114) into equations (5.113)2 and (5.113)3 , we find that under
transformations (5.4) and conditions ,0)( 0
1 ≠= hfefhf 1)( ghg = and ,0)( 0
1 ≠= hfejhj
the similarity solution for system (5.3) and the thin film equation (5.1) in tandem with
group (5.112) and constraint 7723
2
7
10
1217
10
126
22
3ccccc
ff
jfgc
ff
jcc ��
�
�
�−+−+��
�
�
�+= is
;06
),( 181716
10
112
14
3
10
1 ≠++���
�
�+−++−= ctcxct
ff
jgxcx
ff
jtxh (5.115)
where ,00 ≠f ,01 ≠f ,01 ≠j ,2c ,3c ,7c ,4
2
10
17102
14ff
jcffcc
+=
( ) ( ),
2
22
10
72310
2
712116
ff
cccffcgfjc
−+−=
( ),
2
2
10
171021
17ff
jcffcgc
+= ,18c 2f and 1g are
arbitrary constants with .022
16
10
1114
2
10
1 ≠+−+− ctff
jgxcx
ff
j

147
GROUP (XXVIII)
Subject to conditions ( ) ,0)(4
21 ≠+= fhfhf ( ) 0)(4
2
2
11 ≠+= fhcfhg and ,0)( =hj
system (5.3) admits symmetry group (XXVIII), namely
( )( ) ,0),,( 23211 ≠+−= −
fhecechtxAxcxc
,0),,( 6
1
3211
≠++
=−
cc
ecechtxB
xcxc
(5.116)
;0)(),,( ≠= thtx βη
where ,01 ≠c ,01 ≠f ,2c ,3c 6c and 2f are arbitrary constants with 011
32 ≠− − xcxcecec
and 02 ≠+ fh while 0)( ≠tβ is an arbitrary function of .t
Similarity Solutions
Group (5.116), system (5.3) and the invariant surface condition (5.7) give
( ) ,02
1 =− xxxxx hchh ( ) ( ) ,02
1
4
21 =+−+ txxxxxx hhchfhf
(5.117)
( )( ) ;02326
1
32 11
11
≠+−=���
�
�+
++ −
−
fhecechcc
ecech
xcxc
x
xcxc
t
where ,01 ≠c ,01 ≠f ,2c ,3c 6c and 2f are arbitrary constants with 011
32 ≠− − xcxcecec
and .02 ≠+ fh
As 0=xh forces 0=th in equation (5.117)2 , rendering equation (5.117)3 inconsistent,
0≠xh is a requirement. Hence 02
1 =≠= txxxx hhch in equations (5.117)1 and (5.117)2 ,
simplifying system (5.117) to give
,0)(),( ≠= xytxh ,0)()(2
1 ≠′=′′′ xycxy ( )
;0)(
)(
6132
321
211
11
≠++
−=
+
′−
−
ccecec
ececc
fxy
xyxcxc
xcxc
(5.118)
where ,01 ≠c ,2c ,3c 6c and 2f are arbitrary constants with .011
32 ≠− − xcxcecec
We directly solve equation (5.118)3 , finding its general solution to identically satisfy
equation (5.118)2. Hence under transformations (5.4) and the conditions
( ) ,0)(4
21 ≠+= fhfhf ( ) 0)(4
2
2
11 ≠+= fhcfhg and ,0)( =hj the similarity solution
arising for system (5.3) and the thin film equation (5.1) in connection with group (5.116)
is the steady state solution

148
;0),( 98711 ≠++= −
cecectxhxcxc
(5.119)
where ,01 ≠c ,010 ≠c ,2c ,3c ,6c ,1
102
7c
ccc = ,
1
103
8c
ccc = 21069 fccc −= and 2f are
arbitrary constants such that .011
32 ≠− − xcxcecec
Solution (5.22) is a special case of solution (5.119) with .02 ≠c
GROUP (XXIX)
Under the conditions ( ) ,0)(4
21 ≠+= fhfhf ( ) 0)(4
2
2
11 ≠+= fhcfhg and ,0)( =hj
system (5.3) yields symmetry group (XXIX), namely
( )( ) ,014
1),,( 243
2
11 ≠+−−+
= −fhecec
cthtxA
xcxc
(5.120)
,4
1),,( 7
1
43
2
11
���
�
�+
+
+=
−
cc
ecec
cthtxB
xcxc
;0)(),,( ≠= thtx βη
where 0)( ≠tβ is an arbitrary function of t while ,01 ≠c ,01 ≠f ,2c ,3c ,4c 7c and
2f are arbitrary constants with 0111
43 ≠−− − xcxcecec and ( )( ) .04 22 ≠++ fhct
Similarity Solutions
Group (5.120), system (5.3) and the invariant surface condition (5.7) imply
( ) ,02
1 =− xxxxx hchh ( ) ( ) ,02
1
4
21 =+−+ txxxxxx hhchfhf
(5.121)
( )( ) ;014
1
4
1243
2
7
1
43
2
11
11
≠+−−+
=���
�
�+
+
++ −
−
fhececct
hcc
ecec
cth
xcxc
x
xcxc
t
where ,01 ≠c ,01 ≠f ,2c ,3c ,4c 7c and 2f are arbitrary constants with
0111
43 ≠−− − xcxcecec and ( )( ) .04 22 ≠++ fhct
As 0=xh gives 0=th in equation (5.121)2 , rendering equation (5.121)3 inconsistent,
we require .0≠xh Thus 02
1 =≠= txxxx hhch in equations (5.121)1 and (5.121)2 ,
reducing system (5.121) to give
,0)(),( ≠= xytxh ,0)()(2
1 ≠′=′′′ xycxy ( )
;01
)(
)(
7143
431
211
11
≠++
−−=
+
′−
−
ccecec
ececc
fxy
xyxcxc
xcxc
(5.122)

149
where 0)( ≠′ xy since 0≠xh while ,01 ≠c ,3c ,4c 7c and 2f are arbitrary constants
with 0111
43 ≠−− − xcxcecec and .07143
11 ≠++ −ccecec
xcxc
By the method in [48], we find the general solution of equation (5.122)2 to be
;0)( 109811 ≠++= −
cececxyxcxc
(5.123)
where ,01 ≠c ,2c ,1
28
c
cc = 9c and 10c are arbitrary constants with .011
912 ≠− − xcxceccec
Substituting result (5.123) into equation (5.122)3 , we see that the only cases generating
valid similarity solutions for system (5.3) and the thin film equation (5.1) are
(1) ,03 ≠c (2) ,034 =≠ cc ,01
1
7 ≠=c
c
(3) ,034 =≠ cc ,01
1
7 ≠−=c
c (4) .0437 ==≠ ccc
Case (1) 03 ≠c
From result (5.123) and equation (5.122)3 , the constraint ( )
3
2
714
4
1
c
ccc
−= arises.
Therefore under transformations (5.4) and the conditions ( ) ,0)(4
21 ≠+= fhfhf
( ) 0)(4
2
2
11 ≠+= fhcfhg and ,0)( =hj the similarity solution of system (5.3) and the
thin film equation (5.1) in association with group (5.120) and the constraints 03 ≠c and
( )
3
2
714
4
1
c
ccc
−= is the steady state solution
;0),( 1211811 ≠++= −
cecectxhxcxc
(5.124)
where ,01 ≠c ,02 ≠c ,03 ≠c ,01
28 ≠=
c
cc ,7c
( ),
4
12
31
2
712
11cc
cccc
+=
( )
31
231712
12
1
cc
fcccccc
−+= and 2f are arbitrary constants.
Solutions (5.124) and (5.22) are equivalent.
Case (2) ,034 =≠ cc 01
1
7 ≠=c
c
Result (5.123) and relations (5.122)1 and (5.122)3 imply that under transformations (5.4)
and the conditions ( ) ,0)(4
21 ≠+= fhfhf ( ) 0)(4
2
2
11 ≠+= fhcfhg and ,0)( =hj the

150
similarity solution of system (5.3) and the thin film equation (5.1) in connection with
group (5.120) and the constraints 034 =≠ cc and 01
1
7 ≠=c
c is the steady state solution
;0),( 291 ≠−= −
fectxhxc
(5.125)
where ,01 ≠c 09 ≠c and 2f are arbitrary constants. Solutions (5.125) and (5.18) are
equivalent.
Case (3) ,034 =≠ cc 01
1
7 ≠−=c
c
Result (5.123) and relations (5.122)1 and (5.122)3 imply that under transformations (5.4)
and the conditions ( ) ,0)(4
21 ≠+= fhfhf ( ) 0)(4
2
2
11 ≠+= fhcfhg and ,0)( =hj the
similarity solution of system (5.3) and the thin film equation (5.1) in tandem with group
(5.120) and the constraints 034 =≠ cc and 01
1
7 ≠−=c
c is the steady state solution
;0),( 1291111 ≠++= −
cecectxhxcxc
(5.126)
where ,01 ≠c ,04 ≠c ,09 ≠c ,02
4
9
11 ≠=c
cc
4
249
12
2
c
fccc
+−= and 2f are arbitrary
constants. Solution (5.126) is a special case of solution (5.22) with .074 ≠cc
Case (4) 0437 ==≠ ccc
From result (5.123) and relations (5.122)1 and (5.122)3 , two similarity solutions with
their accompanying constraints arise under transformations (5.4) for system (5.3) and the
thin film equation (5.1) in tandem with group (5.120) and its associated conditions on
,0)( ≠hf )(hg and ).(hj The first such solution with its corresponding constraint is
equivalent to solution (5.125) with the constraint .171 =cc
With respect to the second solution, result (5.123) with relations (5.122)1 and (5.122)3
gives rise to the condition .171 −=cc Hence under transformations (5.4) and the
conditions ( ) ,0)(4
21 ≠+= fhfhf ( ) 0)(4
2
2
11 ≠+= fhcfhg and ,0)( =hj the
similarity solution of system (5.3) and the thin film equation (5.1) in connection with
group (5.120) and the constraints 171 −=cc and 043 == cc is the steady state solution
;0),( 281 ≠−= fectxhxc
(5.127)

151
where ,01 ≠c ,02 ≠c 01
28 ≠=
c
cc and 2f are arbitrary constants. Solutions (5.127) and
(5.18) are equivalent.
The infinitesimal generators 2921 ,...,, VVV denote the algebras for the symmetry groups
(I), (II),…, (XXIX) respectively; (see Gandarias [28]). These generators are as follows.
A List of Infinitesimal Generators for Groups (I)-(XXIX)
The generators 2921 ,...,, VVV for the respective symmetry groups (I), (II),…, (XXIX) are
[ ],
)(
4)(
0
01
1txtf
tfjV
∂
∂+
∂
∂+=
α
α ,)(2
txtV
∂
∂+
∂
∂= α
( ) ,)()( 213h
fhttx
tcV∂
∂++
∂
∂+
∂
∂= αα ( ) ,)()( 11
424h
ecettx
tcVxcxc
∂
∂−+
∂
∂+
∂
∂= −αα
( ) ,)()( 1324511
hcecect
txtcV
xcxc
∂
∂+−+
∂
∂+
∂
∂= −αα
( ) ,)()(
2
1
611
hfhet
txe
c
tV
xcxc
∂
∂++
∂
∂+
∂
∂−= −− α
α
( ) ( )( ) ,)()(
223
1
711
hfhcet
txce
c
tV
xcxc
∂
∂+++
∂
∂+
∂
∂+= α
α
( ) ( ) ,)(3
)(218
hfht
txcx
tV
∂
∂++
∂
∂+
∂
∂+= α
α
+∂
∂+
∂
∂
���
�
���
���
�
�++�
��
�
�++= −−
txe
c
c
te
cce
c
tV
xcxcxc 111
21
)(
4
)( 2
1
2
22
1
9
κα
( ) ,2
1)(4
)( 22
2
2 111
hfhe
cte
cet
xcxcxc
∂
∂+
���
�
���
���
�
�−+�
��
�
�− −− κα
( ) ,4
)(4
)(2
2
2
2
22
1
101111
hfhe
cet
txe
cce
c
tV
xcxcxcxc
∂
∂+�
��
�
�−+
∂
∂+
∂
∂���
�
�++= −− α
α
( ) ,)(3
2)(2
3
4
213
4
2
1
11
1111
1111
hfhecet
txjece
c
tV
xctjcxc
xctjcxc
∂
∂+�
��
�
�−+
∂
∂+
∂
∂
���
�
���
�+���
�
�+=
−−
αα
( ) ,3
22
3
4
23
2
513
4
23
2
1
5
12
1111
111111
11
hfheceec
txjecee
c
cV
xctjcxc
tjcxctjcxc
tjc
∂
∂+�
��
�
�−+
∂
∂+
∂
∂
���
�
���
�+���
�
�+=
−−−−
( ) ,)(3
2)(1 2
3
2
213
2
1
213
111111
hfhtec
txjte
c
cV
xctjcxctjc
∂
∂++
∂
∂+
∂
∂
���
�
���
�+�
��
�
�+−=
−−
αα

152
( ) ,23
2
23
2
1
214
111111
hfhec
txe
c
cV
xctjcxctjc
∂
∂++
∂
∂+
∂
∂−=
−−
+∂
∂+
∂
∂
���
�
���
�++�
��
�
�+=
+−−
txjt
c
cece
c
tV
tjcxctjcxc
1
2
13
2
43
2
1
153
2)(
)( 111111
αα
( ) ,)( 23
2
43
2111111
hfhecet
tjcxctjcxc
∂
∂+�
��
�
�−
+−−
α
( ) ,2 23
22
53
2
253
22
53
2
1
216
111111111111
hfhecec
txcece
c
cV
tjcxctjcxctjcxctjcxc
∂
∂+�
��
�
�−+
∂
∂+
∂
∂���
�
�++=
+−−+−−
+∂
∂+
∂
∂
�
��
�
��
+��
�
�
��
�
�+±=
��
�
�−�
�
�
�−±
tx
jece
c
jV
tjxj
cctjx
j
cc
36
13
26
2
5
3
26
5
117
11
521
1
52�
( ) ,2
3
26
2
5
3
26
2
11
521
1
52
hfhecec
tjxj
cctjx
j
cc
∂
∂+
��
�
�
��
�
�−
��
�
�−�
�
�
�−± �
( ) ,2
3
2
4
3
2
2
3
2
4
3
2
1
218
11111111
hfhecec
txece
c
cV
tjxctjxctjxctjxc
∂
∂+
���
�
���
�−+
∂
∂+
∂
∂
���
�
���
�+=
��
�
�−−�
�
�
�−�
�
�
�−−�
�
�
�−
,2
)()( 43
2
2
3
10
119
hcxcxcx
ff
jt
txxtV
∂
∂���
�
�+++−+
∂
∂+
∂
∂= αα
[ ] [ ] ,2
)()()()( 32
2
10
120
hcxcx
ff
jtxt
txtxtV
∂
∂���
�
�++−++
∂
∂+
∂
∂+= γαγα
,2
)()( 32
2
10
121
hcxcx
ff
jt
txtV
∂
∂���
�
�++−+
∂
∂+
∂
∂= αα
( ) ,)(3
2
3
2)( 212122
hfht
txjctjxtV
∂
∂++
∂
∂+
∂
∂��
���
�+��
�
�+−= αα
( ) ,3
2)(
3
2
3
2
3
2
2
1)( 2211312
2
123h
fhctjxttx
jctjxctjxtV∂
∂+�
�
�
�+−+
∂
∂+
∂
∂
�
��
�
��
+���
�
���
�+��
�
�−+�
�
�
�−= αα
( ) ,3
2
3
2
22311
2
311
24h
fhctjxctx
ctjxc
V∂
∂+�
�
�
�+−+
∂
∂+
∂
∂��
�
�+−=
( ) ,)()(3
1110
25h
ttx
jctjxtf
V∂
∂+
∂
∂+
∂
∂��
���
�++−= αα
( ) ,)(11
)(3
21
0
021
0
0026
hfht
txj
f
fctj
f
fxt
fV
∂
∂++
∂
∂+
∂
∂��
���
� −+���
�
�+
−−= αα

153
,2
23
2
2 2
612
10
113
2
2
3
10
1
2
727
hft
ctgcxtff
jgcxcx
ff
j
txft
cxV
∂
∂
+
++���
�
�−++−
+∂
∂+
∂
∂
+
+=
( )( ) ,2326
1
32
2811
11
hfhecec
txc
c
ececV
xcxc
xcxc
∂
∂+−+
∂
∂+
∂
∂���
�
�+
+= −
−
( )( ) ;14
1
4
1243
2
7
1
43
2
2911
11
hfhecec
cttxc
c
ecec
ctV
xcxc
xcxc
∂
∂+−−
++
∂
∂+
∂
∂���
�
�+
+
+= −
−
where the details of each iV for all i ∈ }29,...,2,1{ relate to the respective groups (I) –
(XXIX).
We next present four tables of results. Table 1 features the functions ),(hf )(hg and
)(hj (distinguishing enhanced symmetries of thin film equation (5.1)) with their
associated infinitesimal generators .iV Tables 2a, 2b and 2c outline a dimensional
classification of the mathematical structure of groups (I)-(XXIX) and the corresponding
.iV As spatial limitations preclude the inclusion of ( ),,, htxA ( )htxB ,, and ( )htx ,,η in
the same table, the component ( )htx ,,η for each of the groups (I)-(XXIX) and the
corresponding iV are separately tabulated. Table 3 displays the similarity solutions
),( txh for systems (5.2) and (5.3) in tandem with groups (I)-(XXIX) where applicable.

154
5.3 TABLES OF RESULTS
Table 1. Each row lists the functions ),(hf )(hg and )(hj (distinguishing the enhanced
symmetries of thin film equation (5.1)) with the associated infinitesimal generators .iV
)(hf )(hg )(hj iV
00
1 ≠hfef 1g 01 ≠j 1V
arbitrary 0≠ 0)(1 ≠hfg [ ] )()( 1
1
0 hfjdssfj
h
′���
�
���
�+�
−
2V
( ) 00
21 ≠+f
fhf ( ) 00
21 ≠+f
fhg 0 3V
00
1 ≠hfef 00
2
11 ≠hfecf
hfej 0
1 4V
00
1 ≠hfef 00
2
11 ≠hfecf
hfej 0
1 5V
( ) 00
21 ≠+f
fhf ( ) 00
2
2
11 ≠+f
fhcf 0 6V
( ) 00
21 ≠+f
fhf ( ) 00
2
2
11 ≠+f
fhcf 0 7V
( ) 00
21 ≠+f
fhf 0 ( ) 01
210 ≠+
−ffhj 8V
( ) 00
21 ≠+f
fhf ( ) 00
2
2
11 ≠+f
fhcf 0 9V
( ) 00
21 ≠+f
fhf ( ) 00
2
2
11 ≠+f
fhcf 0 10V
( ) 03
21 ≠+ fhf ( ) 03
2
2
11 ≠+ fhcf 01 ≠j 11V
( ) 03
21 ≠+ fhf ( ) 03
2
2
11 ≠+ fhcf 01 ≠j 12V
( ) 03
21 ≠+ fhf ( ) 03
2
2
11 ≠+ fhcf 01 ≠j 13V
( ) 03
21 ≠+ fhf ( ) 03
2
2
11 ≠+ fhcf 01 ≠j 14V
( ) 03
21 ≠+ fhf ( ) 03
2
2
11 ≠+ fhcf 01 ≠j 15V
( ) 03
21 ≠+ fhf ( ) 03
2
2
11 ≠+ fhcf 01 ≠j 16V
( ) 03
21 ≠+ fhf 0)(36 3
2
2
1
52
1 ≠+���
�
�fh
j
ccf
01 ≠j 17V
( ) 03
21 ≠+ fhf ( ) 03
2
2
11 ≠+ fhcf 01 ≠j 18V
00
1 ≠hfef 0 00
1 ≠hfej 19V
00
1 ≠hfef 0 00
1 ≠hfej 20V
00
1 ≠hfef 0 00
1 ≠hfej 21V
( ) 03
21 ≠+ fhf 0 01 ≠j 22V
( ) 03
21 ≠+ fhf 0 01 ≠j 23V
( ) 03
21 ≠+ fhf 0 01 ≠j 24V
00
1 ≠hfef 0 01 ≠j 25V
( ) 00
21 ≠+f
fhf 0 01 ≠j 26V
00
1 ≠hfef 1g 00
1 ≠hfej 27V
( ) 04
21 ≠+ fhf ( ) 04
2
2
11 ≠+ fhcf 0 28V
( ) 04
21 ≠+ fhf ( ) 04
2
2
11 ≠+ fhcf 0 29V

155
The entries for ),(hf )(hg and )(hj in each of rows 1-29 in table 1 respectively
correspond to the symmetry groups (I)-(XXIX).
Table 2a. A dimensional classification of the mathematical structure of groups (I)-(XIV)
(the enhanced symmetries of the thin film equation (5.1)) with their associated
infinitesimal generators .iV 02
1)(
4
)(111 2
1
2
22
1
≠��
�
�++�
��
�
�++ −− xcxcxc
ec
c
te
cce
c
t κα
),,( htxA ),,( htxB iV
0 [ ])(
4)(
0
01
tf
tfj
α
α +
1V
0 0)( ≠tα 2V
( ) 0)( 2 ≠+ fhtα 0)(1 ≠tc α 3V
( ) 0)( 11
4 ≠− − xcxcecetα 0)(2 ≠tc α 4V
( ) 0)( 13211 ≠+− −
cecectxcxcα 0)(4 ≠tc α 5V
( ) 0)( 21 ≠+−
fhetxcα
0)(
1
1
≠− − xce
c
tα 6V
( )( ) 0)( 221 ≠++ fhcetxcα ( ) 0
)(3
1
1 ≠+ cec
t xcα 7V
( ) 0)( 2 ≠+ fhtα ( ) 03
)(1 ≠+ cx
tα 8V
( ) 02
1)(4
)( 22
2
2 111 ≠+���
�
���
���
�
�−+�
��
�
�− −−
fhec
tec
etxcxcxc κα
0
21
)(
4
)(111 2
1
2
22
1
≠��
�
�++�
��
�
�++ −− xcxcxc
ec
c
te
cce
c
t κα 9V
( ) 04
)( 2
2
2 11 ≠+���
�
�− −
fhec
etxcxcα 0
4
)(11
2
22
1
≠���
�
�++ − xcxc
ec
cec
tα
10V
( ) 0)( 23
4
2
1111 ≠+�
��
�
�−
−
fhecetxctjc
xcα 03
2)(1
3
4
2
1
1111 ≠+�
��
�
�+
−
jecec
t xctjcxcα
11V
( ) 023
4
23
2
5
1111
11
≠+���
�
�−
−−
fheceecxctjc
xctjc
03
21
3
4
23
2
1
5 1111
11
≠+���
�
�+
−−
jeceec
c xctjcxc
tjc
12V
( ) 0)( 23
2
2
111
≠+−
fhtecxctjc
α 03
2)(1 1
3
2
1
2 111
≠+���
�
�+−
−
jtec
c xctjc
α 13V
( ) 023
2
2
111
≠+−
fhecxctjc
0111
3
2
1
2 ≠−− xctjc
ec
c
14V
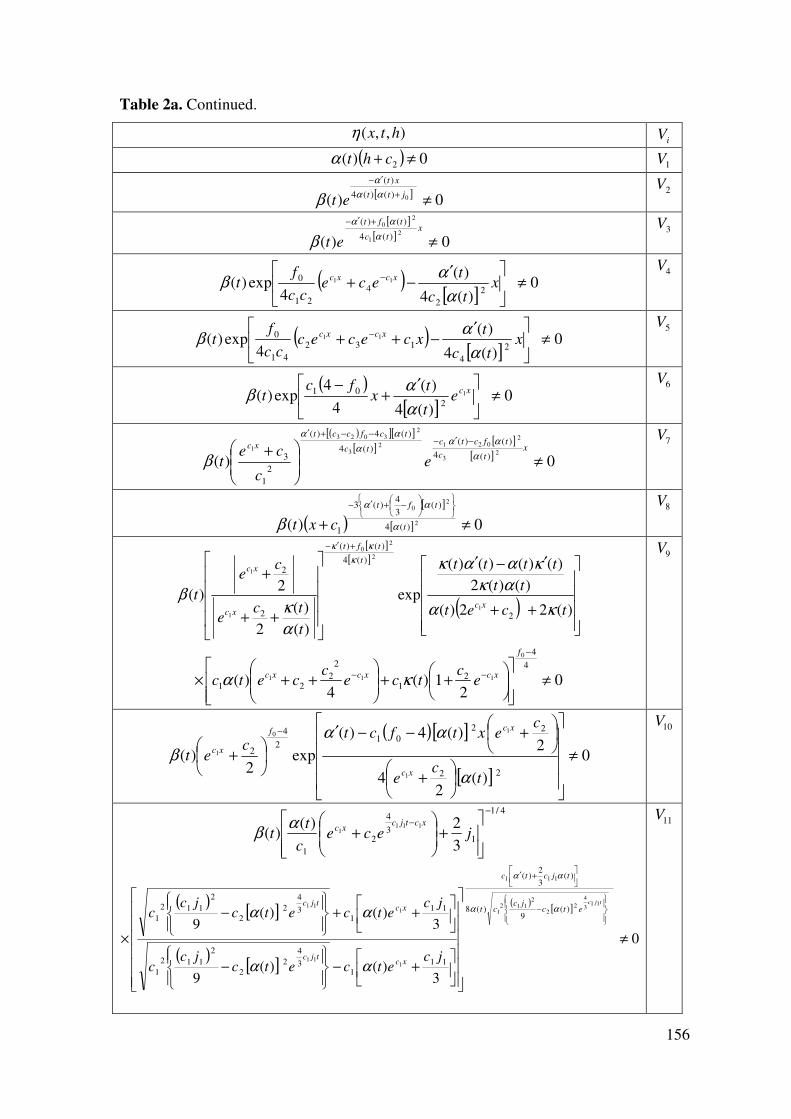
156
Table 2a. Continued.
),,( htxη iV
( ) 0)( 2 ≠+ chtα 1V
[ ]0)( 0)()(4
)(
≠+
′−
jtt
xt
etαα
α
β 2V
[ ][ ] 0)(
21
20
)(4
)()(
≠
+′−x
tc
tft
etα
αα
β 3V
( )[ ]
0)(4
)(
4exp)(
2
2
4
21
0 11 ≠��
���
� ′−+ −
xtc
tece
cc
ft
xcxc
α
αβ
4V
( )[ ]
0)(4
)(
4exp)(
2
4
132
41
0 11 ≠��
���
� ′−++ −
xtc
txcecec
cc
ft
xcxc
α
αβ
5V
( )[ ]
0)(4
)(
4
4exp)( 1
2
01 ≠��
���
� ′+
− xce
t
tx
fct
α
αβ
6V
( )[ ][ ][ ]
[ ][ ] 0)(
2
202
3
123
23023
1
)(
)()(
4)(4
)(4)(
2
1
3 ≠���
�
� +−′−
−−+′
xt
tfct
c
ctc
tcfcct
xc
ec
cet α
ααα
αα
β
7V
( )[ ]
[ ] 0)( 2
20
)(4
)(3
4)(3
1 ≠+���
���
��
�
�−+′−
t
tft
cxt α
αα
β
8V
[ ][ ]
( )����
�
�
����
�
�
++
′−′
����
�
�
����
�
�
++
+
+′−
)(22)(
)()(2
)()()()(
exp
)(
)(
2
2)(
2
)(4
)()(
2
2
1
2
20
1
1
tcet
tt
tttt
t
tce
ce
txc
t
tft
xc
xc
κα
ακ
καακ
α
κβ
κ
κκ
02
1)(4
)(4
4
21
2
221
0
111 ≠���
�
���
���
�
�++�
��
�
�++×
−
−−
f
xcxcxce
ctce
ccetc κα
9V
( )[ ]
[ ]0
)(2
4
2)(4)(
exp2
)(22
22
012
4
2
1
10
1 ≠
����
�
�
����
�
�
��
�
�+
��
�
�+−−′
��
�
�+
−
tc
e
cextfct
cet
xc
xcf
xc
α
αα
β
10V
4/1
13
4
2
1 3
2)()(
1111
−
−
���
�
���
�+��
�
�
�+ jece
c
tt
xctjcxcα
β
( )[ ]
( )[ ]
( )[ ]
0
3)()(
9
3)()(
9
113
4
22
2112
1
111
111
111
)(9
)(8
)(3
2)(
11
13
4
2
2
2
112
1
11
13
4
2
2
2
112
1
≠
������
�
�
������
�
�
��
���
�+−
�
��
�
��
−
��
���
�++
�
��
�
��
−
×
�
�
�
�
�
�−
��
���
�+′
tjc
etcjc
ct
tjctc
xctjc
xctjc
jcetcetc
jcc
jcetcetc
jcc αα
αα
αα
αα
11V

157
Table 2a. Continued.
),,( htxη iV
03
2)(
4/1
13
4
23
2
1
5 1111
11
≠���
�
���
�+���
�
�+
−
−−
jeceec
ct
xctjcxc
tjc
β 12V
03
2)(1)(
11
11
1111
3
2)()(4
3
2)()()(
13
2
1
23
2)()(4
)(
≠���
�
���
�+�
��
�
�+−
��
���
�+
��
���
�++′
−
−��
���
�+
′−
jttc
jttct
xctjcjtt
xt
jtec
cet
αα
ααα
αα
α
αβ
13V
0)( 4
1
≠x
c
etβ 14V
Table 2b. A dimensional classification of the mathematical structure of groups (XV)-
(XXIII) (the enhanced symmetries of the thin film equation (5.1)) with their associated
infinitesimal generators .iV
),,( htxA ),,( htxB iV
( ) 0)( 23
2
43
2111111
≠+���
�
�−
+−−
fhecettjcxctjcxc
α 03
2)(
)(1
2
13
2
43
2
1
111111
≠++���
�
�+
+−−
jtc
cece
c
t tjcxctjcxc
αα 15V
( ) 023
22
53
2
2
111111
≠+���
�
�−
+−−
fhecectjcxctjcxc
02 53
22
53
2
1
2 111111
≠���
�
�++
+−−
cecec
c tjcxctjcxc
16V
( ) 02
3
26
2
5
3
26
2
11
521
1
52
≠+��
�
�
��
�
�−
��
�
�−�
�
�
�−±
fhecectjx
j
cctjx
j
cc�
036
13
26
2
5
3
26
5
11
1
521
1
52
≠+��
�
�
��
�
�+±
��
�
�−�
�
�
�−± j
ecec
j tjxj
cctjx
j
cc�
17V
( ) 02
3
2
4
3
2
2
1111
≠+���
�
���
�−
��
�
�−−�
�
�
�−
fhecectjxctjxc
01111
3
2
4
3
2
1
2 ≠���
�
���
�+
��
�
�−−�
�
�
�− tjxctjxc
ecec
c
18V
02
)( 43
2
2
3
10
1 ≠���
�
�+++− cxcxcx
ff
jtα
0)( ≠xtα 19V
[ ] 02
)()( 32
2
10
1 ≠���
�
�++−+ cxcx
ff
jtxt γα
0)()( ≠+ txt γα 20V
02
)( 32
2
10
1 ≠���
�
�++− cxcx
ff
jtα
0)( ≠tα 21V
( ) 0)( 2 ≠+ fhtα 0
3
2
3
2)( 121 ≠+�
�
�
�+− jctjxtα 22V
( ) 03
2)( 221 ≠+�
�
�
�+− fhctjxtα 0
3
2
3
2
3
2
2
1)( 1312
2
1 ≠+���
�
���
�+��
�
�−+�
�
�
�− jctjxctjxtα 23V

158
Table 2b. Continued.
),,( htxη iV
4/1
1
2
13
2
43
2
1 3
2)(
)()(
111111
−
+−−
���
�
���
�++�
��
�
�+ jt
c
cece
c
tt
tjcxctjcxc
αα
β
[ ] ( )
[ ] ( )
[ ] ( )
0
3
2)(2)(
9
4)(
3
4)(
4
3
2)(2)(
9
4)(
3
4)(
4 211
2
3112
22
224
412
1
1
111
111
9
4)(
3
4)(
4)(4
)(
113
2
2
2
11
2
11
2
3
112
2
2
2
24
4
12
1
113
2
2
2
11
2
11
2
3
112
2
2
2
24
4
12
1
≠
��������������
�
�
��������������
�
�
������
�
�
�
��
���
�++
−���
���
++−
������
�
�
�
��
���
�++
+���
���
++−
×
�
��
�
��
++−
′
−
−
jctc
cjt
c
cccct
tc
tjcxc
tjcxc
jcettc
cc
jctc
cjt
c
cccc
jcettc
cc
jctc
cjt
c
cccc
ααα
α
αα
αα
αα
αα
15V
02)(
4/1
53
22
53
2111111
≠���
�
�++
−+−−
cecettjcxctjcxc
β 16V
012
1)(
4/1
3
26
2
5
3
26
5
1
1
521
1
52
≠ �
��
�
��
−��
�
�
��
�
�+
−
��
�
�−�
�
�
�−± tjx
j
cctjx
j
cc
ecec
t�
�β 17V
0)(
4/1
4
3
22
411
1
≠���
�
���
�+
−
��
�
�−
ceettjxcx
c
β 18V
[ ][ ] 0)( 4824)(4
)(4)(032023
1
12
2
≠++−
+′− x
fcx
fcx
f
j
t
tt
ext α
αα
β 19V
[ ] [ ] [ ][ ]
[ ] 0)()()( 2
22
032023
1
1
)(4
)(4)()()()(4
)()()()(
4824≠+
+′−+
′−′+++−
t
tttxtt
ttttx
fcx
fcx
f
j
txtet α
ααγαα
αγγα
γαβ 20V
[ ][ ] 0)(
2
2032023
1
1
)(4
)()(
824≠
′−++− x
t
ttfcx
fcx
f
j
et α
αα
β 21V
[ ][ ]
03
2
3
2)()(
2
2
)(4
)()(
121 ≠��
���
�+��
�
�+−
+′−
t
tt
jctjxttα
αα
αβ
22V
4/1
1312
2
13
2
3
2
3
2
2
1)()(
−
�
��
�
��
+���
�
���
�+��
�
�−+�
�
�
�− jctjxctjxtt αβ
( )
( )
[ ]
( )
0
3
4)(2
3
2)(
3
4)(2
3
2)( 1
223
2/3
3
4)(24
)()(
1
2
2321
1
2
2321
≠
����
�
�
����
�
�
+−+��
�
�+−−
+−+��
�
�+−
×
+−
′−
−
jtcc
tti
jtccictjxt
jtccictjxtα
αα
αα
αα
23V

159
Table 2c. A dimensional classification of the mathematical structure of groups (XXIV)-
(XXIX) (the enhanced symmetries of the thin film equation (5.1)) with their associated
infinitesimal generators .iV
),,( htxA ),,( htxB iV
( ) 03
22311 ≠+�
�
�
�+− fhctjxc 0
3
2
2
2
311 ≠�
�
�
�+− ctjx
c
24V
0)( ≠tα ( ) 0)(
3111
0 ≠++− jctjxtf
α 25V
( ) 0)( 2 ≠+ fhtα 0
11)(
31
0
0
21
0
00 ≠−
+���
�
�+
−− j
f
fctj
f
fxt
fα 26V
02
23
2
2
612
10
113
2
2
3
10
1
≠+
++���
�
�−++−
ft
ctgcxtff
jgcxcx
ff
j
0
2 2
7 ≠+
+
ft
cx
27V
( )( ) 023211 ≠+− −
fhececxcxc
06
1
3211
≠++ −
cc
ececxcxc
28V
( )( ) 014
1243
2
11 ≠+−−+
−fhecec
ct
xcxc
���
�
�+
+
+
−
7
1
43
2
11
4
1c
c
ecec
ct
xcxc
29V
Table 2c. Continued.
),,( htxη iV
03
2
2)(
4/12
311 ≠
���
�
���
���
�
�+−
−
ctjxc
tβ 24V
( )
[ ][ ]
0)(3
)(2
0
20
)(4
)()(3
1110 ≠�
�
���
�++−
+′−
tf
tft
jctjxtf
tα
αα
αβ
25V
[ ][ ]
011
)(3
)(
20
20
)(4
)()(3
1
0
021
0
00 ≠��
���
� −+���
�
�+
−−
+′−
tf
tft
jf
fctj
f
fxt
ft
α
αα
αβ
26V
( ) ( )[ ]
( )( )
( )0)( 2
12
8
32
7
48
36612362
2
1
1710211
112
71723102
171023
1
≠+−+
+���
��� −−−+++−
ftf
jcffcgf
xtjgcjcccffxjcffcxj
cxetβ
27V
0)( ≠tβ 28V
0)( ≠tβ 29V

160
Table 3. Row 1 features the similarity solution ),( txh for system (5.2) in association
with group (I). The remaining rows list the similarity solutions ),( txh for system (5.3) in
connection with groups (II)-(XXIX) where applicable.
Group ),( txh
(I) constant
(II) constant
(III) 022
1 ≠− fecc
x
under the constraint 02
1
11 ≠=
c
fg
(IV) 087611 ≠++ −
cececxcxc
under the constraint 01 =j
(V) 010987
11 ≠+++ −cxcecec
xcxc under the constraint 0
4
3
110
1 ≠=c
cffj
(VI) 0231 ≠−−
fecxc
(VII) 0641 ≠+ cecxc
under the constraints 0524 ==≠ ccc and ,2436 fccc −=
0241 ≠− fecxc under the constraints ,054 =≠ cc 23 cc = and ,26 fc −=
( ) 06
2
2411 ≠++ −
cececxcxc
under the constraints
,04 ≠c ,23 cc −= 2
245 ccc = and 2426 2 fccc −−=
(VIII) ( ) 0
62
3
1
10
1 ≠−+− fcxff
j
(IX), (X) 065411 ≠++ −
cececxcxc
(XIX) 0
26113
223
10
1 ≠+++− cxcxc
xff
j under the constraint 04 =c
(XX), (XXI) 0
26113
223
10
1 ≠+++− cxcxc
xff
j
(XXV) 0
6ln
1ln
3
1
1
0
11
0
≠++−f
j
fctjx
f
(XXVI)
( )( )0
1
23332
3
21
0
0
1
001
2
0100
≠−���
�
�+
−−
���
�
���
�
−−− fctj
f
fx
fff
fj ff
under the constraint 2
30 ≠f
(XXVII) 0
6181716
10
112
14
3
10
1 ≠++���
�
�+−++− ctcxct
ff
jgxcx
ff
j under the
constraint 7723
2
7
10
1
217
10
1
2622
3ccccc
ff
jfgc
ff
jcc ��
�
�
�−+−+��
�
�
�+=
(XXVIII) 098711 ≠++ −
cececxcxc

161
Table 3. Continued.
Group ),( txh
(XXIX) 012118
11 ≠++ −cecec
xcxc under constraints 03 ≠c and
( ),
4
1
3
2
71
4c
ccc
−=
0291 ≠−−
fecxc
under constraints 03 =c and ,171 =cc
01291111 ≠++ −
cececxcxc
under constraints 034 =≠ cc and ,171 −=cc
0281 ≠− fecxc
under constraints 171 −=cc and 043 == cc
5.4 CONCLUDING REMARKS
Non-classical symmetry analysis of partitions (5.2) and (5.3) of thin film equation (5.1)
generated symmetries occurring under specific conditions on ,0),,( ≠htxη rendering
these symmetries hybrids of classical and non-classical symmetries. For system (5.2), we
derived one new symmetry group (namely group (I)) extending beyond the range of
groups obtainable via the non-classical treatment of the thin film equation (5.1). By a
similar process, twenty-eight new symmetry groups (namely groups (II)-(XXIX)) arose
for system (5.3), extending beyond the range of groups retrievable via the non-classical
approach to the thin film equation (5.1). Groups (I)-(XXIX) enhance the symmetries of
the thin film equation (5.1) and therefore we may consider twenty-nine symmetry-
enhancing constraints added to the latter equation.
Systems (5.2) and (5.3) are respectively identical to systems (4.2) and (4.3). A
comparison of symmetry group (I) obtained for system (5.2) with the classical Lie
groups (I)-(VI) arising for system (4.2) showed that in view of the forms of 0),,( ≠htxη
occurring in both sets of groups, neither set encompasses the other. Comparing
symmetry groups (II)-(XXIX) arising for system (5.3) with classical Lie group (VII)
derived for system (4.3) also indicates that neither set of groups includes the other as a
special case.
We derived similarity solutions for systems (5.2) and (5.3) in association with the
symmetry groups for each system. The constant solution is the only similarity solution
occurring for systems (5.2) and (5.3) (and hence for the thin film equation (5.1)) in
connection with the respective groups (I) and (II) and their associated conditions. The
reason for this is set out in the derivations of similarity solutions for systems (5.2) and
(5.3) in conjunction with groups (I) and (II) respectively.

162
Valid similarity solutions do not arise for system (5.3) in tandem with groups (XI)-
(XVIII) and (XXII)-(XXIV) under the condition 0)( 1 ≠= jhj since the contradiction
01 =j arises. Steady state solutions, travelling wave solutions and cubic solutions are
the only valid similarity solutions occurring for system (5.3) and the thin film equation
(5.1) in association with groups (III)-(X), (XIX)-(XXI) and (XXV)-(XXIX) and their
accompanying conditions. Clearly, a greater variety of similarity solutions for system
(5.3) is available via the non-classical approach than via the Lie classical analysis
applied to the equivalent system (4.3) in Chapter 4.

163
CHAPTER 6
CLASSICAL SYMMETRY-ENHANCING
CONSTRAINTS FOR THE
THIN FILM EQUATION
INVOLVING ARBITRARY FUNCTIONS
6.1 INTRODUCTION
We use the method of classical symmetry-enhancing constraints to derive symmetry
groups for the thin film equation (2.1) given by
[ ] ;0)()()( =++−∂
∂txxxxx hhhjhhghhf
x (6.1)
where the restriction 0)( ≠hf applies.
The technique of classical symmetry-enhancing constraints, outlined in chapter 4 of this
thesis, is identical to the method of symmetry-enhancing constraints [29]. The method of
classical symmetry-enhancing constraints is thus termed to distinguish it from the
method of symmetry-enhancing constraints [29] which is augmented by the non-classical
procedure and features in chapter 5 of this thesis. A detailed account of the method of
symmetry-enhancing constraints occurs in [29].
Applying the method of classical symmetry-enhancing constraints, we consider the
enlarged system (4.2) arising from partitioning equation (6.1). System (4.2) engenders
new Lie symmetry groups. Here, augmenting system (4.2) with the arbitrary nontrivial
functions )(xa and )(tb generates the system
( ) ,0)()()()(2
≠=′−+ tbxahhghhjh xxt
(6.2)
[ ] ;0)()()()( ≠−=−∂
∂tbxahhghhf
xxxxxx
where )(xa and )(tb denote arbitrary nontrivial functions of x and t respectively.

164
Introducing nontrivial terms into an enlarged system of equations resulting from
partitioning a target equation admits more classical symmetries than the original target
equation possesses and is studied by Goard and Broadbridge [29].
We consider the one-parameter )(ε Lie group of general infinitesimal transformations in
,x t and ,h namely
( ) ( ),,, 2
1 εεξ Ohtxxx ++=
( ) ( ),,, 2
1 εεη Ohtxtt ++= (6.3)
( ) ( );,, 2
1 εεζ Ohtxhh ++=
which preserves system (6.2).
Thus if ),( txh φ= , then from ),( 111 txh φ= , evaluating the expansion of ε∂
∂ 1h at 0=ε
generates the invariant surface condition
).,,(),,(),,( htxt
hhtx
x
hhtx ζηξ =
∂
∂+
∂
∂ (6.4)
The solutions of equation (6.4) correspond to functional forms of the similarity solutions
for system (6.2).
In the following section, we use the Lie classical method to obtain the symmetry groups
leaving system (6.2) invariant.
6.2 CLASSICAL SYMMETRY-ENHANCING CONSTRAINTS
By the method of classical symmetry-enhancing constraints, system (6.2) remains
invariant under group transformations (6.3) provided the group generators ),,( htxξ ,
),,( htxη and ),,( htxζ satisfy the determining equations

165
,0=hξ ,0== xh ηη ,0=hhζ ( ) ,03)( =−′xxxxxhhf ξζ
[ ] ,0),()()()()()()()()()( =′−′−′−++ txtbxattbxattbxahj hxt ξηηζζζ
[ ] ,0)()(2)( =′′−−′−′ hgthg hx ζζηξ ,0)(
)(=�
�
���
� ′ζ
hf
hf
dh
d ( ) ,0)( =−′
xxxhhf ξζ
(6.5)
[ ] ,0)(2)()()( =′−−−′+′xtx hgthjhj ζξξηζ ,0
)(
)(64 =
′+− xxxxh
hf
hfζξζ
( ) ,02)(
)(
)(
)(4 =−+
′+− xhxxxxxxxxxxxxh
hf
hg
hf
hfζξζξζ
,0)(
)(2
)(
)(46 =−�
�
���
�−− xxxxxxh
hf
hg
hf
hg
dh
dξζξζ
.0),()()()()()()(
)(4)()()()( =′+′+�
�
���
� ′−−+− txtbxattbxa
hf
hftbxahghf hxxxxxxx ξηζζξζζ
Equating to zero the coefficients of all derivatives of h and the sum of all remaining
terms not involving derivatives of h within the invariance requirements for system (6.2)
generates system (6.5). All subscripts in system (6.5) denote partial differentiation with
,x t and h regarded as independent variables. Primes throughout this chapter denote
differentiation with respect to the argument indicated.
System (6.5) enables the derivation of all the Lie classical symmetries and corresponding
conditions on ,0)( ≠hf )(hg and )(hj for system (6.2) under transformations (6.3).
System (6.2) admits seventeen new Lie classical groups extending beyond the confines
of groups derived via the classical method for the thin film equation (6.1). These new
groups enhance the symmetries of the thin film equation (6.1). One may therefore
consider symmetry-enhancing constraints to be added to thin film equation (6.1).
The following pages contain a description of each of these groups, a brief mention of the
special cases arising for the group in question and the derivation of similarity solutions
of system (6.2) pertaining to groups (III)-(XVII), where applicable. The solutions of
system (6.2) are also solutions to the thin film equation (6.1).

166
GROUP (I)
Subject to the conditions ,0)( 1 ≠= fhf 0)( =hg and ,)( 1jhj = system (6.2) admits
classical group (I) given by
( ) ( ) ,)(),,( 4113
2
15 atjtjxatjxahtx ++−+−= αξ ),(),,( thtx αη =
(6.6)
( )[ ] ;),(3),,( 215 txdhatjxahtx ++−=ζ
such that ),( txd satisfies the equations
( )[ ] ,48)()()( 31511 atjxattbxaddjdf txxxxx −−−′=++ α
(6.7)
( ) ( )[ ]4113
2
151 )()()()()()( atjtjxatjxatbxattbxaddj tx ++−+−′+′=+ αα
( )[ ] ;3)()()( 215 atjxattbxa −−−′+ α
where ,01 ≠f ,2a ,3a ,4a 5a and 1j are arbitrary constants while ,0)( ≠xa 0)( ≠tb
and )(tα are arbitrary functions of their respective arguments.
GROUP (II)
Under the conditions ,0)( 1 ≠= fhf 1)( ghg = and ,)( 1jhj = system (6.2) admits
classical group (II) given by
,)(),,( 41 atjhtx += αξ ),(),,( thtx αη = ;),(),,( 2 txdhahtx +=ζ (6.8)
such that ),( txd satisfies the equations
),()()(111 ttbxaddjdgdf txxxxxxx α ′=++−
(6.9)
[ ] [ ] ;)()()()()()()()()( 2411 attbxaatjtbxattbxaddj tx −′++′+′=+ ααα
where 01 ≠f , 1g , 1j , 2a and 4a are arbitrary constants while ,0)( ≠xa 0)( ≠tb and
)(tα are arbitrary functions of their respective arguments.

167
GROUP (III)
Subject to the conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( =hj ( ) 0)( 37 ≠+= exexa and
,0)(exp)( 21 ≠���
�
���
�= �
t
dsseetb γ system (6.2) admits classical group (III) given by
( ),),,( 35 exehtx +=ξ ,0)(
1),,( ≠=
thtx
γη
(6.10)
( ) ( ) ;0)(exp4)(
)(5),,( 113102527152 ≠++
�
��
��
� �
+���
�
���
���
���
�+
′−++= � � eexedsdrree
s
seeheehtx
t s
γγ
γζ
where ,01 ≠f ,01 ≠e ,07 ≠e ,2e ,3e ,5e 10e and 11e are arbitrary constants while
0)( ≠tγ is an arbitrary function of t with .0)(4)( 2
5 ≠+′ tet γγ
Similarity Solutions
Group (6.10), system (6.2) and the invariant surface condition (6.4) give the equations
( ) ,0)(exp 2371 ≠���
�
���
�+= �
t
t dsseexeeh γ ( ) ,0)(exp 23711 ≠���
�
���
�+−= �
t
xxxx dsseexeehf γ
(6.11)
( ) ( ) �
��
��
� �
+���
�
���
���
���
�+
′−++=++ � �
t s
tx edsdrrees
seeheeh
thexe 10252715235 )(exp4
)(
)(5
)(
1γ
γ
γ
γ
( ) ;0113 ≠++ eex
where ,01 ≠f ,01 ≠e ,07 ≠e ,2e ,3e ,5e 10e and 11e are arbitrary constants while
0)( ≠tγ is an arbitrary function of t with .0)(4)( 2
5 ≠+′ tet γγ
Directly solving equation (6.11)2 and substituting its general solution into equations
(6.11)1 and (6.11)3 gives rise to the constraints .0111052 ==== eeee
Hence under transformations (6.3) and conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( =hj
( ) 0)( 37 ≠+= exexa and 0)( 1 ≠= etb with constraints ,0111052 ==== eeee the
similarity solution for system (6.2) and thus for the thin film equation (6.1) in
conjunction with group (6.10) is
( ) ;0),( 15181471
2
13
3
12
4
17
5
16 ≠+++++++= etexeteexexexexetxh (6.12)

168
where ,01 ≠e ,07 ≠e ,0120 1
71
16 ≠−=f
eee ,01 ≠f ,3e ,12e ,13e ,14e ,15e
1
731
1724 f
eeee −=
and 73118 eeee = are arbitrary constants while .03 ≠+ ex
GROUP (IV)
With respect to the conditions ,0)( 1 ≠= fhf ,)( 1ghg = ,0)( 10 ≠+= jhjhj
0)( 8 ≠= axa and ,0)(2
1 ≠+
=at
atb system (6.2) admits classical group (IV) given by
( ) ( ) ( )[ ] ,0ln),,( 40517323273 ≠++−++−+−= atjajaaataataahtxξ
(6.13)
( ) ,0),,( 23 ≠+−= atahtxη ( ) ;0ln),,( 523103 ≠++−+= aataahahtxζ
where ,01 ≠f ,00 ≠j ,01 ≠a ,03 ≠a ,07 ≠a ,08 ≠a ,010 ≠a ,2a ,4a ,5a 1g and 1j
are arbitrary constants with .02 ≠+ at
Similarity Solutions
Group (6.13), system (6.2) and the invariant surface condition (6.4) give the equations
( ) ,02
81
10 ≠+
=++at
aahjhjh xt ,0
2
81
11 ≠+
−=−at
aahghf xxxxxx
(6.14)
( ) ( ) ( )[ ]{ } ( ) =+−++−++−+− tx hatahatjajaaataataa 2340517323273 ln
( ) ;0ln 523103 ≠++−+ aataaha
where ,01 ≠f ,00 ≠j ,01 ≠a ,03 ≠a ,07 ≠a ,08 ≠a ,010 ≠a ,2a ,4a ,5a 1g and 1j
are arbitrary constants and .02 ≠+ at
Consistency in equation (6.14)2 requires 0≠xxh since the contradiction 081 =aa
otherwise arises.
Solving equation (6.14)2 by the methods of Lagrange [24] and differential operators
gives rise to the cases to be considered, namely (1) ,01 ≠g (2) .01 =g
Substituting the general solution of equation (6.14)2 for these cases into equation 6.14)1
leads to the contradiction .0081 =jaa Hence under transformations (6.3), there is no
valid similarity solution for system (6.2) and thus for the thin film equation (6.1) in
conjunction with group (6.13) and its associated conditions.

169
GROUP (V)
Under the conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( 10 ≠+= jhjhj 0)( 6 ≠= axa and
( ) ,042
42)(
2
119
2
10109
119
2
101092/5
1110
2
91 ≠��
�
�
��
�
�
−+−−
−++++=
−
a
aaaata
aaaataatataatb system (6.2) admits
group (V) given by
( ) ( ) ,02
)(2),,( 416
21912
0
1914919059 ≠+++
���
�
���
�+−+++= � � atat
jadsas
j
jadrrbaraajxatahtx
t s
ξ
,0),,( 1110
2
9 ≠++= atatahtxη (6.15)
( ) ( ) ( ) ;)(2),,( 12149191
0
9
917 adssbasaatjxj
ahtaahtx
t
+++−+−= �ζ
where 10a and 11a are constants such that the only cases applying are
(i) 010 ≠a and 11a are arbitrary constants, (ii) 01011 =≠ aa .
Furthermore, ,01 ≠a ,06 ≠a ,09 ≠a ,019 ≠a ,01 ≠f ,00 ≠j ,2a ,4a ,5a ,12a ,14a
,16a 17a and 1j are arbitrary constants such that ,059 ≠+ ata 01110
2
9 ≠++ atata and
( ) .024 109119
2
10 ≠+±− ataaaa
Similarity Solutions
Group (6.15), system (6.2) and the invariant surface condition (6.4) give the equations
( ) ( ) ,042
422
119
2
10109
119
2
101092/5
1110
2
96110 ≠��
�
�
��
�
�
−+−−
−++++=++
−
a
xt
aaaata
aaaataatataaahjhjh
( ) ,042
422
119
2
10109
119
2
101092/5
1110
2
9611 ≠��
�
�
��
�
�
−+−−
−++++−=
−
a
xxxx
aaaata
aaaataatataaahf (6.16)
( ) ( ) +�
��
��
� �
+++���
�
���
�+−+++ � � x
t s
hatatja
dsasj
jadrrbaraajxata 416
219
12
0
19
149190592
)(2
( ) ( ) ( ) ( ) ;)(2 12149191
0
99171110
2
9 adssbasaatjxj
ahtaahatata
t
t +++−+−=++ �
where 10a and 11a are constants such that the only cases applying are
(i) 010 ≠a and 11a are arbitrary constants, (ii) 01011 =≠ aa .

170
In addition, ,01 ≠a ,06 ≠a ,09 ≠a ,019 ≠a ,01 ≠f ,00 ≠j ,2a ,4a ,5a ,12a ,14a
,16a 17a and 1j are arbitrary constants such that ,059 ≠+ ata 01110
2
9 ≠++ atata and
( ) .024 109119
2
10 ≠+±− ataaaa
Directly solving equation (6.16)2 and substituting its general solution into equation
(6.16)1 results in the contradiction .0)(06 =tbja Hence under transformations (6.3), there
is no valid similarity solution for system (6.2) and thus for thin film equation (6.1) in
connection with group (6.15) and its associated conditions.
GROUP (VI)
Under the conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( 10 ≠+= jhjhj 0)( 6 ≠= axa and
,0exp)( 25
1 ≠��
���
�= −
t
atatb system (6.2) admits group (VI) given by
( ) ,0exp),,( 13211
1084
2
359 ≠+��
���
���
���
�++++++= a
t
a
t
aatatataxatahtxξ
,0),,( 2
9 ≠= tahtxη (6.17)
( ) ( ) ;exp),,( 1223
14
2
1516
191
0
9917 a
t
atata
t
aatjx
j
ahtaahtx +�
�
���
���
���
�++++−+−= −−ζ
where ,01 ≠a ,02 ≠a ,06 ≠a ,09 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary constants
for all i ∈ }19,17,16,15,14,13,12,11,10,8,5,4,3{ while ( ) .059
2 ≠+ atat
Similarity Solutions
Group (6.17), system (6.2) and the invariant surface condition (6.4) give the equations
( ) ,0exp 25
6110 ≠��
���
�=++ −
t
ataahjhjh xt ,0exp 25
611 ≠��
���
�−= −
t
ataahf xxxx
(6.18)
( )tx htaha
t
a
t
aatatataxata
2
913211
1084
2
359 exp +�
� �
+��
���
���
���
�++++++
( ) ( ) ;exp 1223
14
2
1516
191
0
9917 a
t
atata
t
aatjx
j
ahtaa +�
�
���
���
���
�++++−+−= −−
where ,01 ≠a ,02 ≠a ,06 ≠a ,09 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary constants
for all i ∈ }19,17,16,15,14,13,12,11,10,8,5,4,3{ while ( ) .059
2 ≠+ atat

171
Directly solving equation (6.18)2 and substituting its general solution into equation
(6.18)1 generates the contradiction .0)(06 =tbja Hence under transformations (6.3), no
valid similarity solution exists for system (6.2) and thus for thin film equation (6.1) in
connection with group (6.17) and its associated conditions.
GROUP (VII)
Subject to the conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( 10 ≠+= jhjhj 0)( 6 ≠= axa
and ,0)( 5
1 ≠= −tatb system (6.2) admits group (VII) given by
( ) ,0),,( 3
4
2
8103
2
259 ≠++++++= −−tataatataxatahtxξ ,0),,( 2
9 ≠= tahtxη
(6.19)
( ) ( ) ;),,( 4
13
3
11121
0
9
914
−− +++−+−= tataatjxj
ahtaahtxζ
where ,01 ≠a ,06 ≠a ,08 ≠a ,09 ≠a ,011 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary
constants for all i ∈ }14,13,12,10,5,4,3,2{ while ( ) .059
2 ≠+ atat
Similarity Solutions
Group (6.19), system (6.2) and the invariant surface condition (6.4) give the equations
( ) ,05
6110 ≠=++ −taahjhjh xt ,05
611 ≠−= −taahf xxxx
(6.20)
( )[ ]tx htahtataatataxata
2
9
3
4
2
8103
2
259 +++++++ −−
( ) ( ) ;4
13
3
11121
0
9914
−− +++−+−= tataatjxj
ahtaa
where ,01 ≠a ,06 ≠a ,08 ≠a ,09 ≠a ,011 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary
constants for all i ∈ }14,13,12,10,5,4,3,2{ while ( ) .059
2 ≠+ atat
Directly solving equation (6.20)2 and substituting its general solution into equation
(6.20)1 gives rise to the contradiction .0061 =jaa Therefore under transformations (6.3),
there is no valid similarity solution for system (6.2) and thus for thin film equation (6.1)
in tandem with group (6.19) and its accompanying conditions.

172
GROUP (VIII)
Under the conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( 10 ≠+= jhjhj 0)( 6 ≠= axa and
( ) ,0)( 2
11101 ≠+=a
ataatb system (6.2) admits group (VIII) given by
( ) ,0),,( 7
2
11104352 ≠++++=
+aataataxahtx
aξ
,0),,( 1110 ≠+= atahtxη (6.21)
( ) ;),,( 12
1
1110892 aataahahtx
a+++=
+ζ
where ,01 ≠a ,05 ≠a ,06 ≠a ,010 ≠a ,01 ≠f ,00 ≠j ,1,22 −−≠a ia and 1j are
arbitrary constants for all i ∈ }12,11,9,8,7,4,3{ while .01110 ≠+ ata
Similarity Solutions
Group (6.21), system (6.2) and the invariant surface condition (6.4) yield the equations
( ) ( ) ,02
11106110 ≠+=++a
xt ataaahjhjh ( ) ,02
1110611 ≠+−=a
xxxx ataaahf
(6.22)
( )[ ] ( ) tx
ahatahaataataxa 11107
2
11104352 ++++++
+ ( ) ;12
1
1110892 aataaha
a+++=
+
where ,01 ≠a ,05 ≠a ,06 ≠a ,010 ≠a ,01 ≠f ,00 ≠j ,1,22 −−≠a ia and 1j are
arbitrary constants for all i ∈ }12,11,9,8,7,4,3{ while .01110 ≠+ ata
Directly solving equation (6.22)2 and substituting its general solution into equation
(6.22)1 gives rise to the contradiction .0061 =jaa Therefore under transformations (6.3),
there is no valid similarity solution for system (6.2) and thus for thin film equation (6.1)
in association with group (6.21) and its accompanying conditions.

173
GROUP (IX)
Subject to the conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( 10 ≠+= jhjhj 0)( 6 ≠= axa
and ( ) ,0)(2
11101 ≠+=−
ataatb system (6.2) admits group (IX) given by
,0ln),,( 41110325 ≠++++= aataataxahtxξ
(6.23)
,0),,( 1110 ≠+= atahtxη ;),,( 7
1110
8
9 aata
ahahtx +
++=ζ
where ,01 ≠a ,05 ≠a ,06 ≠a ,010 ≠a ,01 ≠f ,00 ≠j ia and 1j denote arbitrary
constants for all i ∈ }11,9,8,7,4,3,2{ with .01110 ≠+ ata
Similarity Solutions
Group (6.23), system (6.2) and the invariant surface condition (6.4) yield the relations
( ) ( ) ,02
11106110 ≠+=++−
ataaahjhjh xt ( ) ,02
1110611 ≠+−=−
ataaahf xxxx
(6.24)
[ ] ( )tx hatahaataataxa 111041110325 ln ++++++ ;7
1110
8
9 aata
aha +
++=
where ,01 ≠a ,05 ≠a ,06 ≠a ,010 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary
constants for all i ∈ }11,9,8,7,4,3,2{ while .01110 ≠+ ata
Directly solving equation (6.24)2 and substituting its general solution into equation
(6.24)1 forces the contradiction .0061 =jaa Consequently under transformations (6.3),
no valid similarity solution exists for system (6.2) and thus for the thin film equation
(6.1) in conjunction with group (6.23) and its associated conditions.

174
GROUP (X)
Under the conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( 10 ≠+= jhjhj 0)( 6 ≠= axa and
,0)(1110
1 ≠+
=ata
atb system (6.2) admits group (X) given by
( ) ,0ln),,( 411101110325 ≠+++++= aataataataxahtxξ
(6.25)
,0),,( 1110 ≠+= atahtxη ;ln),,( 7111089 aataahahtx +++=ζ
where ,01 ≠a ,05 ≠a ,06 ≠a ,010 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary
constants for all i ∈ }11,9,8,7,4,3,2{ with .01110 ≠+ ata
Similarity Solutions
Group (6.25), system (6.2) and the invariant surface condition (6.4) generate
( ) ,01110
61
10 ≠+
=++ata
aahjhjh xt ,0
1110
61
1 ≠+
−=ata
aahf xxxx
(6.26)
( )[ ] ( )tx hatahaataataataxa 1110411101110325 ln +++++++ ;ln 7111089 aataaha +++=
where ,01 ≠a ,05 ≠a ,06 ≠a ,010 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary
constants for all i ∈ }11,9,8,7,4,3,2{ while .01110 ≠+ ata
Directly solving equation (6.26)2 and substituting its general solution into equation
(6.26)1 gives rise to the contradiction .0061 =jaa Hence under transformations (6.3), no
valid similarity solution exists for system (6.2) and thus for the thin film equation (6.1)
in connection with group (6.25) and its associated conditions.

175
GROUP (XI)
With respect to the conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( 10 ≠+= jhjhj
0)( 6 ≠= axa and ,0)( 2
1 ≠= taeatb system (6.2) admits group (XI) given by
,0),,( 74352 ≠+++= aeataxahtxtaξ
(6.27)
,0),,( 11 ≠= ahtxη ;),,( 89102 aeahahtxta ++=ζ
where ,01 ≠a ,02 ≠a ,05 ≠a ,06 ≠a ,011 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary
constants for all i ∈ }.10,9,8,7,4,3{
Similarity Solutions
Group (6.27), system (6.2) and the invariant surface condition (6.4) generate
( ) ,02
6110 ≠=++ ta
xt eaahjhjh ,02
611 ≠−= ta
xxxx eaahf
(6.28)
( )tx
tahahaeataxa 117435
2 ++++ ;89102 aeahata ++=
where ,01 ≠a ,02 ≠a ,05 ≠a ,06 ≠a ,011 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary
constants for all i ∈ }.10,9,8,7,4,3{
Directly solving equation (6.28)2 and substituting its general solution into equation
(6.28)1 yields the contradiction .0061 =jaa Hence under transformations (6.3), no valid
similarity solution exists for system (6.2) and thus for the thin film equation (6.1) in
conjunction with group (6.27) and its accompanying conditions.

176
GROUP (XII)
Under the conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( 10 ≠+= jhjhj 0)( 6 ≠= axa and
,0)( 1 ≠= atb system (6.2) admits group (XII) given by
,0),,( 43
2
25 ≠+++= atataxahtxξ
(6.29)
,0),,( 7 ≠= ahtxη ;),,( 8910 atahahtx ++=ζ
where ,01 ≠a ,05 ≠a ,06 ≠a ,07 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary constants
for all i ∈ }.10,9,8,4,3,2{
Similarity Solutions
Group (6.29), system (6.2) and the invariant surface condition (6.4) give the equations
( ) ,06110 ≠=++ aahjhjh xt ,0611 ≠−= aahf xxxx
(6.30)
( ) tx hahatataxa 743
2
25 ++++ ;8910 ataha ++=
where ,01 ≠a ,05 ≠a ,06 ≠a ,07 ≠a ,01 ≠f ,00 ≠j ia and 1j are arbitrary constants
for all i ∈ }.10,9,8,4,3,2{
Directly solving equation (6.30)2 and substituting its general solution into equation
(6.30)1 leads to the contradiction .0061 =jaa Therefore under transformations (6.3),
there is no valid similarity solution for system (6.2) and thus for the thin film equation
(6.1) in tandem with group (6.29) and its associated conditions.

177
GROUP (XIII)
Under conditions ,0)( 1 ≠= fhf ,0)( =hg ,0)( 10 ≠+= jhjhj ( ) 0)( 17 ≠+= axaxa
and [ ]
[ ] ,0)(2exp)(
)(1
33
2 ≠���
�
���
�−= �
−t
dssat
atb γ
γ system (6.2) admits classical group (XIII)
given by
( ) ,02
)(),,( 1
3 ≠++′
= axat
htxγ
ξ ,0)(),,( ≠= thtx γη
(6.31)
++′−′′
+′−
= 10
0
1
0
3 )(22
)(
2
)(),,( at
j
jx
j
th
tahtx γ
γγζ
[ ] [ ] [ ] ;)(2exp2)()(1
33
3
6 � ����
�
���
�−+′ −−
t s
dsdrraassa γγγ
such that 0)( ≠tγ satisfies the equation
[ ]
[ ];0)(
2)()(
4)()()(8)(3)(
3
2
33
2
)4( =′′′+′
+′′−′+′+ t
att
atttatt γ
γγ
γγγγγ (6.32)
where ,02 ≠a ,07 ≠a ,01 ≠f ,00 ≠j ,1a ,3a ,6a 10a and 1j are arbitrary constants
while [ ][ ] .0)(2)( 33 ≠+′+′ atat γγ
Similarity Solutions
Group (6.31), system (6.2) and the invariant surface condition (6.4) yield the equations
( )[ ]
[ ] ,0)(2exp)(
1
33
1
7210 ≠���
�
���
�−
+=++ �
−t
xt dssat
axaahjhjh γ
γ
[ ]
[ ] ,0)(2exp)(
1
33
1
721 ≠���
�
���
�−
+−= �
−t
xxxx dssat
axaahf γ
γ (6.33)
( ) ++′−′′
+′−
=+++′
10
0
1
0
3
1
3 )(22
)(
2
)()(
2
)(at
j
jx
j
th
tahthax
attx γ
γγγ
γ
[ ] [ ] [ ] ;)(2exp2)()(1
33
3
6 � ����
�
���
�−+′ −−
t s
dsdrraassa γγγ
such that 0)( ≠tγ satisfies the equation
[ ]
[ ];0)(
2)()(
4)()()(8)(3)(
3
2
33
2
)4( =′′′+′
+′′−′+′+ t
att
atttatt γ
γγ
γγγγγ (6.34)

178
where ,02 ≠a ,07 ≠a ,01 ≠f ,00 ≠j ,1a ,3a ,6a 10a and 1j are arbitrary constants
while [ ][ ] .0)(2)( 33 ≠+′+′ atat γγ
Directly solving equation (6.33)2 and substituting its general solution into equation
(6.33)1 leads to the contradiction .0)(07 =tbja Hence under transformations (6.3), there
is no valid similarity solution for system (6.2) and thus for the thin film equation (6.1) in
conjunction with group (6.31) and its associated conditions.
GROUP (XIV)
Subject to the conditions ,0)( 1 ≠= fhf ,0)( =hg ,)( 10 jhjhj += 0)( 4 ≠= exa and
( ) ,0)(4
251 ≠+=−
eteetb system (6.2) admits classical group (XIV) given by
( ),),,( 62
25
3
5 eete
exehtx +
++=ξ ,0),,( 25 ≠+= etehtxη
( );0),,(
3
25
7 ≠+
=ete
ehtxζ
(6.35)
where ,01 ≠e ,04 ≠e ,05 ≠e ,07 ≠e ,01 ≠f ,2e ,3e ,6e 0j and 1j are arbitrary
constants such that .025 ≠+ ete
Similarity Solutions
Group (6.35), system (6.2) and the invariant surface condition (6.4) give the equations
( ) ( ) ,04
254110 ≠+=++−
eteeehjhjh xt ( ) ,04
25411 ≠+−=−
eteeehf xxxx
(6.36)
( )
( ) tx heteheete
exe 2562
25
3
5 ++���
�
���
�+
++
( );0
3
25
7 ≠+
=ete
e
where ,01 ≠e ,04 ≠e ,05 ≠e ,07 ≠e ,01 ≠f ,2e ,3e ,6e 0j and 1j are arbitrary
constants with .025 ≠+ ete
Directly solving equation (6.36)2 and substituting its general solution into equation
(6.36)1 forces ,00 =j leading to the contradiction .0541 =eee Therefore under
transformations (6.3), no valid similarity solution exists for system (6.2) and thus for the
thin film equation (6.1) in connection with group (6.35) and its accompanying
conditions.

179
GROUP (XV)
Under the conditions ,0)( 0
1 ≠= hfefhf ,0)( =hg ,)( 10 jhjhj += 0)( 4 ≠= exa and
,0)(60
1 ≠+
=etf
etb system (6.2) admits classical group (XV) given by
,ln),,( 560
0
02 eetff
jehtx ++−=ξ ,0),,( 2 ≠= ehtxη ;0),,(
60
2 ≠+
−=etf
ehtxζ
(6.37)
where ,01 ≠e ,02 ≠e ,04 ≠e ,00 ≠f ,01 ≠f ,5e ,6e 0j and 1j denote arbitrary
constants such that .060 ≠+ etf
Similarity Solutions
Group (6.37), system (6.2) and the invariant surface condition (6.4) give the equations
( ) ,060
41
10 ≠+
=++etf
eehjhjh xt ( ) ,0
60
41
010 ≠
+−=+
etf
eehhfhef xxxxxxxx
hf
(6.38)
;0ln60
2
2560
0
02 ≠+
−=+���
����
�++−
etf
eheheetf
f
jetx
where ,01 ≠e ,02 ≠e ,04 ≠e ,00 ≠f ,01 ≠f ,5e ,6e 0j and 1j are arbitrary constants
with .060 ≠+ etf
Consistency of equation (6.38)2 requires 0≠xxxxxx hhh as the contradiction 041 =ee
otherwise occurs. Furthermore if =),( txh constant, the contradictions 041 =ee and
02 =e arise in equations (6.38)1 and (6.38)3 respectively.
Via the method of Lagrange [24], we deduce the general solution of equation (6.38)3 as
;0ln1
)),((),( 60
0
≠+−= etff
txuytxh (6.39)
where ,02 ≠e ,00 ≠f ,5e 6e and 0j are arbitrary constants with 060 ≠+ etf and
0ln2
5
60
0
0 ≠−+e
eetf
f
j while ( )( ).1ln),( 60602
0
0
2
5 −+++−= etfetff
jt
e
extxu
Furthermore, 0)( ≠uy is an arbitrary function of u such that 0)()()( ≠′′′′′′ uyuyuy as
0≠xxxxxx hhh is a requirement for equation (6.38)2 to be consistent.

180
Substituting result (6.39) into equation (6.38)1 generates the relation
;1
)()(60
41
2
5
10etf
eeuy
e
ejuyj
+
+=′�
�
���
�−+ (6.40)
where ,01 ≠e ,02 ≠e ,04 ≠e ,00 ≠f ,5e ,6e 0j and 1j are arbitrary constants with
,060 ≠+ etf ,0ln2
5
60
0
0 ≠−+e
eetf
f
j ( )( )1ln),( 60602
0
0
2
5 −+++−= etfetff
jt
e
extxu
and .0)()()( ≠′′′′′′ uyuyuy
As ,0)( ≠′ uy equation (6.40) gives rise to the following cases for consideration, namely
(1) ,0141 ≠+ee ,0)(2
5
10 ≠−+e
ejuyj (2) ,141 −=ee .)( 1
2
5
0 je
euyj −=
Case (1) ,0141 ≠+ee 0)(2
5
10 ≠−+e
ejuyj
Differentiating equation (6.40) once with respect to x (forcing 00 ≠j ) and integrating
the result once with respect to u yields the equation
;0)()( 11
2
5
10 ≠=′��
���
�−+ euy
e
ejuyj (6.41)
where ,02 ≠e ,011 ≠e ,00 ≠f ,00 ≠j ,5e 6e and 1j are arbitrary constants with
060 ≠+ etf and .0ln2
5
60
0
0 ≠−+e
eetf
f
j In addition,
( )( )1ln),( 60602
0
0
2
5 −+++−= etfetff
jt
e
extxu and 0)( ≠uy is such that
.0)()()( ≠′′′′′′ uyuyuy
Via result (6.41), equation (6.40) forces the contradiction 00 =f , rendering case (1)
invalid.

181
Case (2) ,141 −=ee 1
2
5
0 )( je
euyj −=
It follows that 0)(0 =′ uyj and since ,0)( ≠′ uy we obtain
,141 −=ee ,00 =j ;02
5
1 ≠=e
ej (6.42)
where 02 ≠e and 05 ≠e are arbitrary constants.
Equations (6.38)2 and (6.40) consequently give
,0)()()(1
)(
0
)4(0
≠=′′′′+−
f
euyuyfuy
uyf
,060 >+ etf
(6.43)
,0)()()(1
)(
0
)4(0
≠−=′′′′+−
f
euyuyfuy
uyf
;060 <+ etf
where ,02 ≠e ,05 ≠e ,00 ≠f 01 ≠f and 6e denote arbitrary constants such that
060 ≠+ etf while te
extxu
2
5),( −= and 0)()()( ≠′′′′′′ uyuyuy is a requirement for
equation (6.38)2 to be consistent.
Hence under transformations (6.3) and the conditions ,0)( 0
1 ≠= hfefhf ,0)( =hg
,0)(2
5 ≠=e
ehj 0
1)(
1
≠−=e
xa and ,0)(60
1 ≠+
=etf
etb the similarity solution for
system (6.2) and thus for the thin film equation (6.1) in connection with group (6.37)
subject to the constraints ,141 −=ee 00 =j and 02
5
1 ≠=e
ej is
;0ln1
)),((),( 60
0
≠+−= etff
txuytxh (6.44)
such that 0)( ≠uy satisfies equations (6.43) where ,00 ≠f ,01 ≠f ,01 ≠e ,02 ≠e
05 ≠e and 6e are arbitrary constants with 060 ≠+ etf while te
extxu
2
5),( −= and
.0)()()( ≠′′′′′′ uyuyuy

182
GROUP (XVI)
With respect to the conditions ,0)( 0
1 ≠= hfefhf ,0)( =hg ,)( 10 jhjhj +=
0)( 4 ≠= exa and
( ) ( )[ ],0
8
)(
0
3
25
3
725
3
71 ≠+++
=feteeete
eetb system (6.2) admits
classical group (XVI) given by
( ) ( )( ) ( )
++++−
−+++=
−
3/1
0257
3/1
0257
7
3/2
00
5
13
13ln3),,(
fietee
fietee
e
fjixehtxξ
( )
( ) ( ) 3/2
025
3/1
07
2
257
2
3/1
025
7
7
3/2
00
22
2ln
fetefe
etee
fetee
e
fj
++−��
���
�+
��
���
�++−
,12e+
(6.45)
,0),,( 25 ≠+= etehtxη ( )
;08
24),,(
0
3
25
3
7
5 ≠++
=fetee
ehtxζ
where ,01 ≠e ,04 ≠e ,05 ≠e ,07 ≠e ,00 ≠f ,01 ≠f ,2e ,12e 0j and 1j are arbitrary
constants while ,025 ≠+ ete ( ) ,08 0
3
25
3
7 ≠++ fetee ( ) ( ) ,0133/1
0257 ≠++± fietee �
( ) ( ) 022
3/2
025
3/1
07
2
25
7 ≠++−��
���
�+ fete
feete
e and ( ) .0
2
3/1
0257 ≠++ fete
e
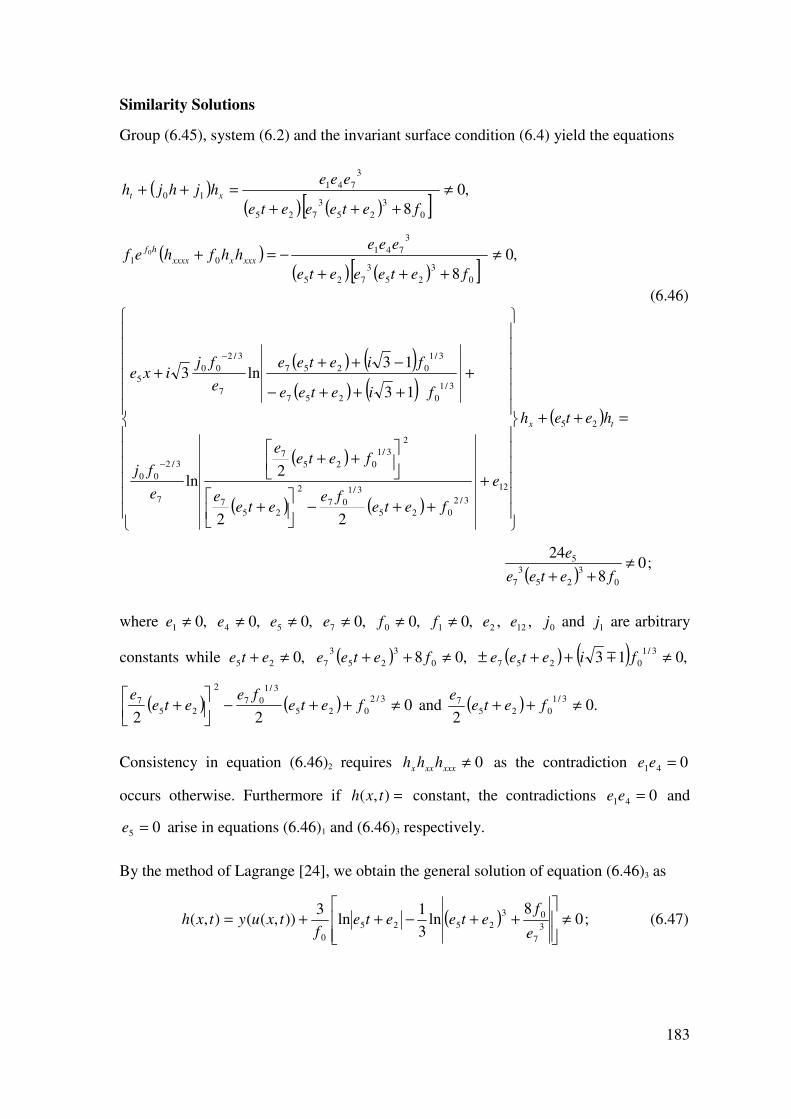
183
Similarity Solutions
Group (6.45), system (6.2) and the invariant surface condition (6.4) yield the equations
( )( ) ( )[ ]
,0
8 0
3
25
3
725
3
74110 ≠
+++=++
feteeete
eeehjhjh xt
( )( ) ( )[ ]
,0
8 0
3
25
3
725
3
74101
0 ≠+++
−=+feteeete
eeehhfhef xxxxxxxx
hf
(6.46)
( ) ( )( ) ( )
( )
( ) ( )
xh
e
fetefe
etee
fetee
e
fj
fietee
fietee
e
fjixe
������
������
�
������
�
������
�
+
++−��
���
�+
��
���
�++
++++−
−+++
−
−
12
3/2
025
3/1
07
2
257
2
3/1
025
7
7
3/2
00
3/1
0257
3/1
0257
7
3/2
00
5
22
2ln
13
13ln3
( ) =++ thete 25
( )
;08
24
0
3
25
3
7
5 ≠++ fetee
e
where ,01 ≠e ,04 ≠e ,05 ≠e ,07 ≠e ,00 ≠f ,01 ≠f ,2e ,12e 0j and 1j are arbitrary
constants while ,025 ≠+ ete ( ) ,08 0
3
25
3
7 ≠++ fetee ( ) ( ) ,0133/1
0257 ≠++± fietee �
( ) ( ) 022
3/2
025
3/1
07
2
25
7 ≠++−��
���
�+ fete
feete
e and ( ) .0
2
3/1
0257 ≠++ fete
e
Consistency in equation (6.46)2 requires 0≠xxxxxx hhh as the contradiction 041 =ee
occurs otherwise. Furthermore if =),( txh constant, the contradictions 041 =ee and
05 =e arise in equations (6.46)1 and (6.46)3 respectively.
By the method of Lagrange [24], we obtain the general solution of equation (6.46)3 as
( ) ;08
ln3
1ln
3)),((),(
3
7
03
2525
0
≠���
�
���
�++−++=
e
feteete
ftxuytxh (6.47)

184
where ,05 ≠e ,07 ≠e ,00 ≠f ,2e 12e and 0j are arbitrary constants with ,025 ≠+ ete
( ) ,08 0
3
25
3
7 ≠++ fetee ( ) ( ) ,0133/1
0257 ≠++± fietee � ( ) ,02
3/1
0257 ≠++ fete
e
( ) ( ) 022
3/2
025
3/1
07
2
25
7 ≠++−��
���
�+ fete
feete
e and
( ) ( )( ) ( )
++++−
−+++
−
3/1
0257
3/1
0257
7
3/2
005
13
13ln3
fietee
fietee
e
fjixe
( )
( ) ( )0
22
2ln 12
3/2
025
3/1
07
2
257
2
3/1
025
7
7
3/2
00 ≠+
++−��
���
�+
��
���
�++−
e
fetefe
etee
fetee
e
fj
while
( )( ) ( ) ++++−
+++−
+
+=
3/1
0257
05
0
25
05
0
255
125 13ln13
3ln
2
3),( fietee
fe
j
i
iete
fe
j
etee
exetxu
( ) ( ) +−++−
3/1
0257
05
0 13ln13
3fietee
fe
j
i
i
( )( ) ( )( ) ( ) 3/1
0257
3/1
0257
2575
3/2
00
13
13ln
3
fietee
fietee
eteee
fji
+++−
−++
+
−
+( )
−���
�
���
� −+−
3/1
0
3/1
02571
05
0
3tan
2
3
f
fetee
fe
j
( ) +���
�
���
�++−+
3/1
025
7
25
05
0
2ln2ln3
2fete
eete
fe
j
( )
( )
( ) ( )+
++−��
���
�+
��
���
�++
+
−
3/2
025
3/1
07
2
25
7
2
3/1
025
7
2575
3/2
00
22
2ln
fetefe
etee
fetee
eteee
fj
( ) ( ) .22
ln4
3/2
025
3/1
07
2
25
7
05
0 fetefe
etee
fe
j++−�
�
���
�+ (6.48)
Furthermore, 0)( ≠uy is an arbitrary function of u such that 0)()()( ≠′′′′′′ uyuyuy as
0≠xxxxxx hhh is a requirement for equation (6.46)2 to be consistent.
Substituting result (6.47) into equations (6.46)1 and (6.46)2 gives the relations

185
[ ]
[ ]),,,()(
),,(
),,(
8),,(
),,(ln
1)( 261
3
7
03
3
0
0 htxeuyjhtx
htx
e
fhtx
htx
fuyj ζ
η
ξ
η
η=′
��
��
�
��
�
��
�
+−
�����
�
�
�����
�
�
+
+
,0)()()()(
1
410
)4( 0 ≠−=′′′′+ − uyfe
f
eeuyuyfuy
[ ]
[ ],0
8),,(
),,(
3
7
03
3
>
+e
fhtx
htx
η
η (6.49)
,0)()()()(
1
410
)4( 0 ≠=′′′′+ − uyfe
f
eeuyuyfuy
[ ]
[ ];0
8),,(
),,(
3
7
03
3
<
+e
fhtx
htx
η
η
where ,01 ≠e ,04 ≠e ,05 ≠e ,07 ≠e ,00 ≠f ,01 ≠f ,2e ,12e ,24
24
5
5
3
74126
e
eeeee
−= 0j
and 1j are arbitrary constants with ,025 ≠+ ete ( ) ,08 0
3
25
3
7 ≠++ fetee
( ) ( ) ,0133/1
0257 ≠++± fietee � ( ) ( ) ,022
3/2
025
3/1
07
2
25
7 ≠++−��
���
�+ fete
feete
e
( ) 02
3/1
0257 ≠++ fete
e and
( ) ( )( ) ( )
++++−
−+++
−
3/1
0257
3/1
0257
7
3/2
005
13
13ln3
fietee
fietee
e
fjixe
( )
( ) ( ).0
22
2ln 12
3/2
025
3/1
07
2
257
2
3/1
025
7
7
3/2
00 ≠+
++−��
���
�+
��
���
�++−
e
fetefe
etee
fetee
e
fj
Furthermore, ),,,( htxξ ),,( htxη and ),,( htxζ are given by results (6.45), ),( txu is
defined by expression (6.48) and 0)( ≠uy is such that .0)()()( ≠′′′′′′ uyuyuy
As ,0)(),,( ≠′ uyhtxζ equation (6.49)1 admits the following two cases, namely
(1) ,026 =e [ ]
[ ],
),,(
),,(
8),,(
),,(ln
1)( 1
3
7
03
3
0
0 jhtx
htx
e
fhtx
htx
fuyj −=
��
��
�
��
�
��
�
+
+η
ξ
η
η
(2) ,026 ≠e [ ]
[ ].0
),,(
),,(
8),,(
),,(ln
1)( 1
3
7
03
3
0
0 ≠+−
��
��
�
��
�
��
�
+
+ jhtx
htx
e
fhtx
htx
fuyj
η
ξ
η
η

186
Case (1) ,026 =e [ ]
[ ]1
3
7
03
3
0
0),,(
),,(
8),,(
),,(ln
1)( j
htx
htx
e
fhtx
htx
fuyj −=
��
��
�
��
�
��
�
+
+η
ξ
η
η
Differentiating [ ]
[ ]1
3
7
03
3
0
0),,(
),,(
8),,(
),,(ln
1)( j
htx
htx
e
fhtx
htx
fuyj −=
��
��
�
��
�
��
�
+
+η
ξ
η
η once with respect to
x forces 00 ≠j and leads to the contradiction ,0)( =′′ uy rendering case (1) invalid.
Case (2) ,026 ≠e [ ]
[ ]0
),,(
),,(
8),,(
),,(ln
1)( 1
3
7
03
3
0
0 ≠+−
��
��
�
��
�
��
�
+
+ jhtx
htx
e
fhtx
htx
fuyj
η
ξ
η
η
We consider the subcases (a) ,00 =j (b) .00 ≠j
Subcase (a) ,0026 =≠ je 0),,(
),,(1 ≠−
htx
htxj
η
ξ
Differentiating equation (6.49)1 with respect to x gives =′′
′
)(
)(5
uy
uye ,0
),,(
),,(1 ≠−
htx
htxj
η
ξ
which result we differentiate once with respect to ,x obtaining the equation
;1)(
)(−=�
�
���
�
′′
′
uy
uy
du
d (6.50)
where ,05 ≠e 2e and 12e are arbitrary constants with 025 ≠+ ete and 0125 ≠+ exe
while ( )
0),(255
125 ≠+
+=
etee
exetxu and 0)( ≠uy is such that .0)()()( ≠′′′′′′ uyuyuy
Directly solving equation (6.50) yields the general solution
;0ln)( 292728 ≠++−= eeueuy (6.51)
where ,05 ≠e 028 ≠e and ,2e ,12e 27e and 29e are arbitrary constants while
,025 ≠+ ete ,0125 ≠+ exe 027 ≠+− eu and ( )
.0),(255
125 ≠+
+=
etee
exetxu
Substituting solution (6.51) into equations (6.49)2 and (6.49)3 forces 04
0
28 ≠=f
e and
leads to the contradiction ,0290 =efe rendering subcase (a) invalid.

187
Subcase (b) ,0026 ≠je [ ]
[ ]0
),,(
),,(
8),,(
),,(ln
1)( 1
3
7
03
3
0
0 ≠+−
��
��
�
��
�
��
�
+
+ jhtx
htx
e
fhtx
htx
fuyj
η
ξ
η
η
Differentiating equation (6.49)1 with respect to x gives
[ ] [ ]
[ ];0
),,(
),,(
8),,(
),,(ln
1)()(
)(
)('1
3
7
03
3
0
050 ≠+−
��
��
�
��
�
��
�
+
+=−′′′
− jhtx
htx
e
fhtx
htx
fuyjeuyj
uy
uy
η
ξ
η
η (6.52)
differentiating which once with respect to x yields the equation
;0)(
)(2
)(
)(
50
50 ≠−′
+′−=�
�
���
�
′′
′
euyj
euyj
uy
uy
du
d (6.53)
where ,05 ≠e ,07 ≠e ,00 ≠f ,00 ≠j 2e and 12e are arbitrary constants with
,025 ≠+ ete ( ) ( ) ,0133/1
0257 ≠++± fietee � ( ) 02
3/1
0257 ≠++ fete
e and
( ) ( ) 022
3/2
025
3/1
07
2
25
7 ≠++−��
���
�+ fete
feete
e while 0)( ≠uy is such that
,0)()()( ≠′′′′′′ uyuyuy 0)( 50 ≠−′ euyj and .0)(2 50 ≠+′− euyj From (6.48),
( )( ) ( ) ++++−
+++−
+
+=
3/1
0257
05
0
25
05
0
255
125 13ln13
3ln
2
3),( fietee
fe
j
i
iete
fe
j
etee
exetxu
( ) ( ) +−++−
3/1
0257
05
0 13ln13
3fietee
fe
j
i
i
( )( ) ( )( ) ( ) 3/1
0257
3/1
0257
2575
3/2
00
13
13ln
3
fietee
fietee
eteee
fji
+++−
−++
+
−
+( )
−���
�
���
� −+−
3/1
0
3/1
02571
05
0
3tan
2
3
f
fetee
fe
j
( ) +���
�
���
�++−+
3/1
0257
25
05
0
2ln2ln3
2fete
eete
fe
j
( )
( )
( ) ( )+
++−��
���
�+
��
���
�++
+
−
3/2
025
3/1
07
2
257
2
3/1
025
7
2575
3/2
00
22
2ln
fetefe
etee
fetee
eteee
fj
( ) ( ) .22
ln4
3/2
025
3/1
07
2
257
05
0 fetefe
etee
fe
j++−�
�
���
�+

188
Hence under transformations (6.3) and the conditions ,0)( 0
1 ≠= hfefhf ,0)( =hg
,)( 10 jhjhj += 0)( 4 ≠= exa and
( ) ( )
,0
8
)(
3
7
03
2525
1 ≠
���
�
���
�+++
=
e
feteete
etb the
similarity solution for system (6.2) and thus for the thin film equation (6.1) in
conjunction with group (6.45) subject to the constraint 0026 ≠je is
( ) ( ) ;08
ln3
1ln
3),(),(
3
7
03
2525
0
≠��
�
�
��
�
�++−++=
e
feteete
ftxuytxh (6.54)
such that 0)( ≠uy satisfies equations
,0)(
)(2
)(
)(
50
50 ≠−′
+′−=�
�
���
�
′′
′
euyj
euyj
uy
uy
du
d
,0)()()()(
1
410
)4( 0 ≠−=′′′′+ − uyfe
f
eeuyuyfuy
[ ]
[ ],0
8),,(
),,(
3
7
03
3
>
+e
fhtx
htx
η
η (6.55)
,0)()()()(
1
410
)4( 0 ≠=′′′′+ − uyfe
f
eeuyuyfuy
[ ]
[ ];0
8),,(
),,(
3
7
03
3
<
+e
fhtx
htx
η
η
where ,01 ≠e ,04 ≠e ,05 ≠e ,07 ≠e ,024
24
5
5
3
741
26 ≠−
=e
eeeee ,00 ≠f ,01 ≠f ,00 ≠j
,2e 12e and 1j are arbitrary constants with ,025 ≠+ ete ( ) ,08 0
3
25
3
7 ≠++ fetee
( ) ( ) ,0133/1
0257 ≠++± fietee � ( ) ( ) ,022
3/2
025
3/1
07
2
25
7 ≠++−��
���
�+ fete
feete
e
( ) 02
3/1
0257 ≠++ fete
e and
( ) ( )( ) ( )
++++−
−+++
−
3/1
0257
3/1
0257
7
3/2
005
13
13ln3
fietee
fietee
e
fjixe
( )
( ) ( ).0
22
2ln 12
3/2
025
3/1
07
2
25
7
2
3/1
025
7
7
3/2
00 ≠+
++−��
���
�+
��
���
�++−
e
fetefe
etee
fetee
e
fj

189
Furthermore, ),,( htxξ and ),,( htxη are given by (6.45), ),( txu is defined by (6.48) and
0)( ≠uy is such that ,0)()()( ≠′′′′′′ uyuyuy ,0)( 50 ≠−′ euyj 0)(2 50 ≠+′− euyj and
[ ]
[ ].0
),,(
),,(
8),,(
),,(ln
1)( 1
3
7
03
3
0
0 ≠+−
��
��
�
��
�
��
�
+
+ jhtx
htx
e
fhtx
htx
fuyj
η
ξ
η
η
GROUP (XVII)
Under conditions ,0)( 1 ≠= fhf ,0)( =hg ,)( 1jhj = 0)( 2 ≠= exa and ,0)( 3 ≠= etb
system (6.2) admits classical group (XVII) given by
,)(),,( 11 etjhtx += βξ ,0)(),,( ≠= thtx βη ;0)(),,( 532 ≠+= eteehtx βζ (6.56)
where ,02 ≠e ,03 ≠e ,01 ≠f ,1e 5e and 1j are arbitrary constants while 0)( ≠tβ is an
arbitrary function of t such that 0)( 532 ≠+ etee β and .0)( ≠′ tβ
A special case of group (6.56) arises and is as follows.
Case (1) The case of group (6.56) with 0)( 321 ≠+= dedttdβ occurs under
conditions ,0)( 1 ≠= fhf ,0)( =hg ,)( 102 jejhjhj += 0)( 2 ≠= exa and 0)( 3 ≠= etb
where ,01 ≠d ,02 ≠d ,02 ≠e ,03 ≠e ,01 ≠f ,02 ≠j ,3d 0j and 1j are arbitrary
constants such that .0321 ≠+ dedtd
Similarity Solutions
Group (6.56), system (6.2) and the invariant surface condition (6.4) give the equations
,0321 ≠=+ eehjh xt ,0321 ≠−= eehf xxxx ;51 ehe x = (6.57)
where ,02 ≠e ,03 ≠e ,01 ≠f ,1e 5e and 1j are arbitrary constants.
Directly solving equation (6.57)2 and substituting its general solution into equations
(6.57)1 and (6.57)3 requires 051 == ee since the case 01 ≠e causes 0=xxh in equation
(6.57)3 , forcing the contradiction 032 =ee in equation (6.57)2.
Hence under transformations (6.3) and the conditions ,0)( 1 ≠= fhf ,0)( =hg
,)( 1jhj = 0)( 2 ≠= exa and ,0)( 3 ≠= etb the similarity solution for system (6.2) and

190
thus for the thin film equation (6.1) in association with group (6.56) subject to the
constraint 051 == ee is
( ) ( ) ( ) ( ) ;0),( 103219
2
18
3
17
4
16 ≠++−+−+−+−= eteetjxetjxetjxetjxetxh (6.58)
where ,02 ≠e ,03 ≠e ,024 1
32
6 ≠−=f
eee ,01 ≠f ,7e ,8e ,9e 10e and 1j are arbitrary
constants.
Infinitesimal generators 1721 ,...,, VVV represent the Lie algebras associated with Lie
groups (I), (II), … , (XVII) respectively; (see Gandarias [27]). These generators are as
follows.
A List of Infinitesimal Generators for Groups (I)-(XVII)
The respective generators iV for all i ∈ }17,...,2,1{ for each of groups (I)-(XVII) are
( ) ( )[ ] ( )[ ]{ } ,),(3)()( 2154113
2
151h
txdhatjxat
tx
atjtjxatjxaV∂
∂++−+
∂
∂+
∂
∂++−+−= αα
[ ] [ ] ,),()()( 2412h
txdhat
tx
atjV∂
∂++
∂
∂+
∂
∂+= αα
( ) +∂
∂+
∂
∂+=
ttxexeV
)(
1353
γ
( ) ( ) ,)(exp4)(
)(5 113102527152
heexedsdrree
s
seehee
t s
∂
∂
��
�
�
��
�
�++
�
��
��
� �
+���
�
���
���
���
�+
′−++ � �γγ
γ
( ) ( ) ( )[ ]{ } ( ) +∂
∂+−
∂
∂++−++−+−=
tata
xatjajaaataataaV 23405173232734 ln
( )[ ] ,ln 523103h
aataaha∂
∂++−+
( ) ( ) +∂
∂
�
��
��
� �
+++���
�
���
�+−+++= � � x
atatja
dsasj
jadrrbaraajxataV
t s
416
219
12
0
19
1491905952
)(2
( )t
atata∂
∂++ 1110
2
9 ( ) ( ) ( ) ,)(2 12149191
0
9
917h
adssbasaatjxj
ahtaa
t
∂
∂
���
�
���
�+++−+−+ �

191
( ) +∂
∂+
∂
∂
�
� �
+��
���
���
���
�++++++=
tta
xa
t
a
t
aatatataxataV
2
913
211
1084
2
3596 exp
( ) ( ) ,exp 12
23
14
2
15
16
191
0
9
917h
at
atata
t
aatjx
j
ahtaa
∂
∂
�
� �
+��
���
���
���
�++++−+− −−
( )[ ] +∂
∂+
∂
∂++++++= −−
tta
xtataatataxataV
2
9
3
4
2
8103
2
2597
( ) ( ) ,4
13
3
11121
0
9
914h
tataatjxj
ahtaa
∂
∂��
���
�+++−+− −−
( )[ ] ( ) +∂
∂++
∂
∂++++=
+
tata
xaataataxaV
a
11107
2
111043582
( )[ ] ,12
1
1110892
haataaha
a
∂
∂+++
+
( ) ( ) ,ln 7
1110
8
91110411103259h
aata
aha
tata
xaataataxaV
∂
∂���
����
�+
+++
∂
∂++
∂
∂++++=
( )[ ] ( ) +∂
∂++
∂
∂+++++=
tata
xaataataataxaV 111041110111032510 ln
( ) ,ln 7111089h
aataaha∂
∂+++
( ) ( ) ,89101174351122
haeaha
ta
xaeataxaV
tata
∂
∂+++
∂
∂+
∂
∂+++=
( ) ( ) ,8910743
2
2512h
atahat
ax
atataxaV∂
∂+++
∂
∂+
∂
∂+++=
( ) +∂
∂+
∂
∂+
+′=
tt
xax
atV )(
2
)(1
3
13 γγ
[ ] [ ] [ ],
)(2exp2)()(
)(22
)(
2
)(
1
33
3
6
10
0
1
0
3
hdsdrraassa
atj
jx
j
th
ta
t s ∂
∂
��
��
�
��
�
��
�
���
�
���
�−+′
++′−′′
+′−
� �−− γγγ
γγγ
( )( )
( ),
3
25
7
2562
25
3
514hete
e
tete
xe
ete
exeV
∂
∂
++
∂
∂++
∂
∂
���
�
���
�+
++=
,ln60
2
2560
0
02
15hetf
e
te
xeetf
f
jeV
∂
∂
+−
∂
∂+
∂
∂���
����
�++−=

192
( ) ( )( ) ( )
( )
( ) ( )
+∂
∂
����
����
�
����
�
����
�
+
++−��
���
�+
��
���
�++
++++−
−+++
=−
−
x
e
fetefe
etee
fetee
e
fj
fietee
fietee
e
fjixe
V
12
3/2
025
3/1
07
2
257
2
3/1
0257
7
3/2
00
3/1
0257
3/1
0257
7
3/2
00
5
16
22
2ln
13
13ln3
( )( )
,8
24
0
3
25
3
7
5
25hfetee
e
tete
∂
∂
+++
∂
∂+
[ ] [ ] ;)()()( 5321117h
eteet
tx
etjV∂
∂++
∂
∂+
∂
∂+= βββ
where the details of 1721 ,...,, VVV respectively pertain to groups (I), (II), … , (XVII).
We now present four tables of results. Table 1 lists the functions ),(hf ),(hg ),(hj
)(xa and )(tb (distinguishing the enhanced symmetries of the thin film equation (6.1))
with the associated infinitesimal generators .iV Table 2 is a dimensional classification of
the mathematical structure of groups (I)-(XVII) and their corresponding .iV Table 3
displays the similarity solutions ),( txh and their corresponding similarity variables
),( txu for system (6.2) in association with groups (III)-(XVII) where applicable. Table 4
features the defining ordinary differential equations (ODEs) for the functions 0)( ≠uy
within the functional forms of ),( txh associated with groups (XV) and (XVI) in table 3.

193
6.3 TABLES OF RESULTS
Table 1. Each row below shows the functions ),(hf ),(hg ),(hj )(xa and )(tb
(distinguishing the enhanced symmetries of the thin film equation (6.1)) in conjunction
with the associated infinitesimal generators .iV
)(hf )(hg
)(hj )(xa )(tb iV
01 ≠f 0 1j arbitrary 0≠ arbitrary 0≠
1V
01 ≠f 1g 1j arbitrary 0≠ arbitrary 0≠
2V
01 ≠f 0 0 ( ) 037 ≠+ exe
0)(exp 21 ≠
���
�
���
��t
dssee γ 3V
01 ≠f 1g 010 ≠+ jhj 08 ≠a
02
1 ≠+ at
a 4V
01 ≠f 0 010 ≠+ jhj 06 ≠a ( )
042
422
119
2
10109
119
2
10109
2/5
1110
2
91
≠��
�
�
��
�
�
−+−−
−++
×++−
a
aaaata
aaaata
atataa
5V
01 ≠f 0 010 ≠+ jhj 06 ≠a 0exp 25
1 ≠��
���
�−
t
ata 6V
01 ≠f 0 010 ≠+ jhj 06 ≠a 05
1 ≠−ta 7V
01 ≠f 0 010 ≠+ jhj 06 ≠a ( ) 02
11101 ≠+a
ataa 8V
01 ≠f 0 010 ≠+ jhj 06 ≠a ( ) 02
11101 ≠+−
ataa 9V
01 ≠f 0 010 ≠+ jhj 06 ≠a 0
1110
1 ≠+ ata
a 10V
01 ≠f 0 010 ≠+ jhj 06 ≠a 02
1 ≠taea 11V
01 ≠f 0 010 ≠+ jhj 06 ≠a 01 ≠a 12V
01 ≠f 0 010 ≠+ jhj ( ) 017 ≠+ axa
[ ][ ] 0)(2exp
)(
1
33
2 ≠���
�
���
�− �
−t
dssat
aγ
γ
13V
01 ≠f 0 10 jhj + 04 ≠e ( ) 0
4
251 ≠+−
etee 14V
00
1 ≠hfef 0
10 jhj + 04 ≠e 0
60
1 ≠+ etf
e 15V
00
1 ≠hfef 0
10 jhj + 04 ≠e
( ) ( )[ ]0
8 0
3
25
3
725
3
71 ≠+++ feteeete
ee
16V
01 ≠f 0 1j 02 ≠e 03 ≠e 17V
The entries listed for ),(hf ),(hg ),(hj )(xa and )(tb in each of rows 1-17 in the
above table respectively correspond to the Lie classical groups (I)-(XVII).

194
Table 2. A dimensional classification of the mathematical structure of groups (I)-(XVII)
(the enhanced symmetries of the thin film equation (6.1)) in conjunction with their
associated infinitesimal generators iV .
),,( htxξ ),,( htxη ),,( htxζ iV
( ) ( ) 4113
2
15 )( atjtjxatjxa ++−+− α )(tα ( )[ ] ),(3 215 txdhatjxa ++− 1V
41 )( atj +α )(tα ),(2 txdha + 2V
( )35 exe + 0
)(
1≠
tγ
( ) ++ hee 52 5
�
��
��
� �
+���
�
���
���
���
�+
′− � �
t s
edsdrrees
see 1025271 )(exp4
)(
)(γ
γ
γ
( ) 0113 ≠++ eex
3V
( ) ( ) ++−+− 23273 ln ataataa
( )[ ] 0405173 ≠++− atjajaa
( ) 023 ≠+− ata ( ) 0ln 523103 ≠++−+ aataaha 4V
( ) +++++ 416
21959
2atat
jaxata
( )� ����
�
���
�+−+
t s
dsasj
jadrrbaraaj 12
0
19149190 )(2
0≠
01110
2
9 ≠++ atata ( ) ( )+−+− tjx
j
ahtaa 1
0
9917
( ) 1214919 )(2 adssbasaa
t
++�
5V
( ) ++++ tataxata 4
2
359
0exp 13211
108 ≠+��
���
���
���
�++ a
t
a
t
aata
02
9 ≠ta ( ) ( )+−+− tjxj
ahtaa 1
0
9917
1223
14
2
1516
19 exp at
atata
t
aa +��
���
���
���
�+++ −−
6V
( ) 03
4
2
8103
2
259 ≠++++++ −−tataatataxata 02
9 ≠ta ( ) ( ) 4
13
3
11121
0
9914
−− +++−+− tataatjxj
ahtaa
7V
( ) 07
2
11104352 ≠++++
+aataataxa
a 01110 ≠+ ata ( ) 12
1
1110892 aataaha
a+++
+ 8V
0ln 41110325 ≠++++ aataataxa 01110 ≠+ ata 7
1110
89 a
ata
aha +
++ 9V
( ) 0ln 411101110325 ≠+++++ aataataataxa 01110 ≠+ ata 7111089 ln aataaha +++ 10V
074352 ≠+++ aeataxata
011 ≠a 8910
2 aeahata ++ 11V
043
2
25 ≠+++ atataxa 07 ≠a 8910 ataha ++ 12V
( ) 02
)(1
3 ≠++′
axatγ
0)( ≠tγ
++′−′′
+′−
10
0
1
0
3 )(22
)(
2
)(at
j
jx
j
th
taγ
γγ
[ ] [ ] [ ]� ����
�
���
�−+′ −−
t s
dsdrraassa1
33
3
6 )(2exp2)()( γγγ
13V
( ) 62
25
35 e
ete
exe +
++
025 ≠+ ete
( )0
3
25
7 ≠+ ete
e 14V
560
0
02 ln eetff
je++−
02 ≠e 0
60
2 ≠+
−etf
e 15V

195
Table 2. Continued.
),,( htxξ ),,( htxη ),,( htxζ iV
++ 125 exe
( ) ( )( ) ( )
++++−
−++−
3/1
0257
3/1
0257
7
3/2
00
13
13ln3
fietee
fietee
e
fji
×−
7
3/2
00
e
fj
( )
( ) ( ) 3/2
025
3/1
07
2
257
2
3/1
025
7
22
2ln
fetefe
etee
fetee
++−��
���
�+
��
���
�++
025 ≠+ ete
( )0
8
24
0
3
25
3
7
5 ≠++ fetee
e
16V
11 )( etj +β 0)( ≠tβ 0)( 532 ≠+ etee β 17V
The entries for ),,,( htxξ ),,( htxη and ),,( htxζ in each of rows 1 – 17 in table 2 relate
to Lie classical groups (I) – (XVII) respectively.
Table 3. Each row lists the similarity solutions ),( txh and any corresponding similarity
variables ),( txu for system (6.2) in association with groups (III)-(XVII) where
applicable. For the entries relating to group XVI in this table, 025 ≠+= eteη .
Group ),( txh ),( txu
III ++++ 2
13
3
12
4
17
5
16 xexexexe
( ) 015181471 ≠+++ etexetee
with
0111052 ==== eeee
XV 0ln
1)),(( 60
0
≠+− etff
txuy
with
41ee 1−= , ,02
5
1 ≠=e
ej 00 =j
te
ex
2
5−

196
Table 3. Continued.
Group ),( txh ),( txu
XVI +)),(( txuy
08
ln3
1ln
33
7
03
0
≠��
�
�
��
�
�+−
e
f
fηη
with 0026 ≠je
+−+
ηη
ln2
3
05
0
5
125
fe
j
e
exe
( ) +++−+
3/1
07
05
0 13ln13
3fie
fe
j
i
iη
( ) +−+−
3/1
07
05
0 13ln13
3fie
fe
j
i
iη
( )( )
+++−
−+−
3/1
07
3/1
07
75
3/2
00
13
13ln
3
fie
fie
ee
fji
η
η
η
−��
�
�
��
�
� −−
3/1
0
3/1
071
05
0
3tan
2
3
f
fe
fe
j η
+��
�
�
��
�
�+−
3/1
07
05
0
2ln2ln3
2f
e
fe
jηη
+
+−��
���
�
��
���
�+−
3/2
0
3/1
07
2
7
2
3/1
0
7
75
3/2
00
22
2ln
ffee
fe
ee
fj
ηη
η
η
3/2
0
3/1
07
2
7
05
0
22ln
4f
fee
fe
j+−�
�
���
�ηη
XVII ( ) ( ) +−+−3
17
4
16 tjxetjxe
( ) ( )+−+− tjxetjxe 19
2
18
01032 ≠+ etee with
051 == ee

197
Table 4. Each row lists the defining ODEs for the functions 0)( ≠uy within the
functional forms of ),( txh associated with groups (XV) and (XVI) in table 3. For the
entry relating to group XVI in this table, .025 ≠+= eteη
Group ( ) 0,,,, )4( =′′′′′′ yyyyyA
XV ,0)()()(
1
)(
0
)4(0
≠=′′′′+−
f
euyuyfuy
uyf
,060 >+ etf
,0)()()(1
)(
0
)4(0
≠−=′′′′+−
f
euyuyfuy
uyf
060 <+ etf
XVI ,0
)(
)(2
)(
)(
50
50 ≠−′
+′−=�
�
���
�
′′
′
euyj
euyj
uy
uy
du
d ,0026 ≠je
,0)()()()(
1
410
)4( 0 ≠−=′′′′+ − uyfe
f
eeuyuyfuy ,0
83
7
03
3
>
+e
fη
η ,0026 ≠je
,0)()()()(
1
410
)4( 0 ≠=′′′′+ − uyfe
f
eeuyuyfuy ,0
83
7
03
3
<
+e
fη
η 0026 ≠je
6.4 CONCLUDING REMARKS
To conclude, classical symmetry analysis of partition (6.2) of the thin film equation (6.1)
led to the addition of seventeen symmetry-enhancing constraints. This showed that the
inclusion of nontrivial functions into an enlarged system resulting from the partitioning
of equation (6.1) can lead to a greater variety of symmetry groups for equation (6.1).
Adding symmetry-enhancing constraints can result in new solutions not available via the
Lie classical method. As examples of the range of similarity solutions obtainable for
system (6.2) and thus for the thin film equation (6.1) under transformations (6.3), we
deduced via classical symmetry analysis the similarity solutions corresponding to groups
(III)-(XVII) where applicable. We performed many of the required computations via
Mathematica [54]. A completion of the results in this chapter would necessitate
obtaining similarity solutions corresponding to groups (I) and (II). The type of solution
generated clearly depends on the form of the individual partition of the thin film
equation (6.1).
Closer study of the similarity solutions of system (6.2) and therefore of the thin film
equation (6.1) in association with groups (I) and (II) might prove worthwhile and could
form part of a future paper on this subject.

198
CHAPTER 7
LOCATING POTENTIAL SYMMETRIES FOR
THE THIN FILM EQUATION
7.1 INTRODUCTION
We apply a method of finding potential symmetries for the thin film equation (2.1) given
by
;0)()()(3
3
=∂
∂+�
�
���
�+
∂
∂−
∂
∂
∂
∂
t
hhk
x
hhg
x
hhf
x (7.1)
where the restriction 0)( ≠hf holds and ).()( hjhk =′
This method requires expressing the thin film equation (7.1) in the conserved form
;0=∂
∂−
∂
∂
t
G
x
F (7.2)
where
),()()(3
3
hkx
hhg
x
hhfF +
∂
∂−
∂
∂= .hG −= (7.3)
The associated system T is
),()()(3
3
hkx
hhg
x
hhf
t+
∂
∂−
∂
∂=
∂
∂φ ;h
x−=
∂
∂φ (7.4)
where ),( txφ denotes the potential while 0)( ≠hf and ).()( hjhk =′
We consider the one-parameter )(ε Lie group of point transformations in htx ,, and ,φ
given by
( ) ( )( ) ( )( ) ( )( ) ( );,,,
,,,,
,,,,
,,,,
2
1
2
1
2
1
2
1
εφεχφφ
εφεζ
εφεη
εφεξ
Ohtx
Ohtxhh
Ohtxtt
Ohtxxx
++=
++=
++=
++=
(7.5)
which leaves system (7.4) invariant.

199
If ( )txh ,α= and ( ),, txβφ = then from ( )111 , txh α= and ( ),, 111 txβφ = evaluating the
expansion of ε∂
∂ 1h and
ε
φ
∂
∂ 1 at 0=ε generates the invariant surface condition
( ) ( ) ( )
( ) ( ) ( ).,,,,,,,,,
,,,,,,,,,,
φχφ
φηφ
φξ
φζφηφξ
htxt
htxx
htx
htxt
hhtx
x
hhtx
=∂
∂+
∂
∂
=∂
∂+
∂
∂
(7.6)
The solutions of equations (7.6) are functional forms of the similarity solutions for
system (7.4). The following section contains a brief description of the method of finding
potential symmetries, introduced and developed by Bluman, Reid and Kumei [17].
7.2 THE METHOD OF OBTAINING POTENTIAL SYMMETRIES
This approach is applicable to a system S of partial differential equations with
independent variables ),...,,( 21 nxxxx = and dependent variables .u (Bluman et al. [17]).
This method requires writing S in a conserved form with respect to some choice of
these variables. Via the conserved form, Bluman et al. [17] introduce potentials .φ The
variables of the resulting system T of partial differential equations are the independent
variables ),,...,,( 21 nxxxx = the dependent variables u of S and the new dependent
variables .φ Bluman et al. [17] then apply the Lie algorithm to determine the one-
parameter )(ε Lie group TG of point transformations, of the enlarged space of variables
( ),,, φux admitted by system .T These authors state, “A transformation in TG is a new
symmetry for S if the infinitesimal of the transformation, corresponding to any of the
variables ),,( ux depends explicitly on .φ ” Bluman et al. [17] add that these new
symmetries are nonlocal symmetries realised as local (point) symmetries in the space
( )φ,,ux and are thus retrievable by Lie’s algorithm. We accordingly apply this technique
to system (7.4).
System (7.4) remains invariant under group transformations (7.5) provided the
infinitesimals ( ),,,, φξ htx ( ),,,, φη htx ),,,( φζ htx and ),,,( φχ htx satisfy the
determining equations

200
,0=== φηηη hx ,0== φξξ h ,0== φζζ hh ,0=hχ
( ) ,03)()()(
)()( =−−−−−
��
��
��
���
�+ xhxttxxx hkhgh
hf
hk
dh
dhf ξζζξχζζ
(7.7)
,0=− xxxh ξζ [ ] ,03)()(
1)( =−
∂
∂+−′
xhfhhf
t ξζχη φ
,0)(
)(2
)(
)(3 =−�
�
���
�−−
hf
hg
hf
hg
dh
dxxxxxxh ξζξζ ( ) ;0=++− xx h χζχξ φ
where 0)( ≠hf and .)()( hjhk =′ Equations (7.7)1 , (7.7)2 and (7.7)3 give
( ) ,)(,,, tahtx =φη
( ) ,),(,,, txbhtx =φξ (7.8)
( ) ;),(),(,,, txdhtxchtx +=φζ
where ,a ,b c and d denote arbitrary functions.
7.3 CONCLUDING REMARKS
As neither of the infinitesimals ( )φξ ,,, htx and ( )φη ,,, htx nor the infinitesimal
),,,( φζ htx depends explicitly on ,φ we conclude that no new symmetry groups for the
thin film equation (7.1) arise via the method of obtaining potential symmetries presented
by Bluman et al. [17]. The following excerpt from Bluman et al. [17] supports this
statement.
“Now assume that a system T admits a one-parameter )(ε Lie group of point
transformations
( ) ( ) ( ),,,;,, 2* εφεξεφ Ouxxuxfx T ++== (2.11a)
( ) ( ) ( ),,,;,, 2* εφεηεφ Ouxuuxgu T ++== (2.11b)
( ) ( ) ( ),,,;,, 2* εφεζφεφφ Ouxuxh T ++== (2.11c)
where ,Tξ ,Tη and Tζ are the infinitesimals of ,x ,u and ,φ respectively, of the group.
This group maps a solution of T into another solution of T and hence induces a
mapping of a solution of S into another solution of .S Thus the group (2.11) is a
symmetry group of PDE .S This one-parameter symmetry group of PDE S is a new
symmetry group of S if and only if either Tξ or Tη depends explicitly on .φ ”

201
CHAPTER 8
CONCLUSION
Via Lie classical analysis, we obtained eight Lie classical symmetry groups for the thin
film equation (1.1) in chapter 2. We also constructed similarity solutions for this
equation in conjunction with each of these groups. Computer techniques involving the
Maple and Mathematica programs greatly facilitated the construction of these groups and
the recovery of several of these solutions [46, 54].
In chapter 3 we derived nine non-classical symmetries of the thin film equation (1.1)
using the non-classical symmetry method of Bluman and Cole [16]. A comparison of
these non-classical symmetry groups with the classical symmetry groups obtained in
chapter 2 revealed that the thin film equation (1.1) does not admit any non-classical
symmetries arising beyond its classical symmetries. Applying the non-classical
symmetry method of Bluman and Cole to the thin film equation (1.1) does not generate
any similarity solutions which are not retrievable by Lie classical analysis of the same
equation.
In chapter 4 we constructed symmetry groups of the thin film equation (1.1) by the
method of symmetry-enhancing constraints involving equation-splitting [29]. From the
perspective of this method, we examined all the combinations of partitions of the thin
film equation (1.1) involving three terms each. The enlarged systems (4.2) and (4.3)
resulting from two partitions of the thin film equation (1.1) admitted seven new Lie
symmetry groups (six groups arose for system (4.2) and one for system (4.3)).
Accordingly seven symmetry-enhancing constraints are added to equation (1.1). We
therefore showed that for this equation, the method of symmetry-enhancing constraints
successfully enables the recovery of symmetry groups extending beyond the confines of
those derived via Lie classical analysis.
The six new Lie groups for system (4.2) indicate travelling wave solutions to be the only
similarity solutions occurring for system (4.2) and hence for the thin film equation (4.1)
under the conditions on ,0)( ≠hf )(hg and )(hj for these new groups. This situation
arises since 0)()( =′=′ hjhg in the conditions on these groups, causing equation (4.2)1
to generate a travelling wave solution of velocity .01 ≠j The derivations of similarity

202
solutions for system (4.3) and thus for the thin film equation (4.1) in association with the
new Lie group arising for system (4.3) show that under the conditions on this group,
steady state solutions are the only similarity solutions recoverable. The nature of system
(4.3) and the need for consistency in the invariant surface condition (4.42)3 creates this
situation.
In chapter 5 we derived symmetry groups for the thin film equation (1.1) via an approach
combining the method of symmetry-enhancing constraints [29] with the non-classical
procedure [16]. Studying systems (1.4) and (1.5) from the perspective of this combined
approach generated twenty-nine new symmetry groups for these systems. This testifies
that the combined method used in this chapter successfully enables the recovery of
symmetry groups extending beyond the confines of those derived via the non-classical
group method. However, only eighteen of those larger symmetries gave rise to valid
similarity solutions for systems (1.4) and (1.5) and therefore for equation (1.1). The only
valid nontrivial similarity solutions thus obtained are those recoverable for system (1.5)
and thus for the thin film equation (1.1). These solutions are of three forms, namely the
steady state solutions, travelling wave solutions and cubic solutions. A greater variety of
similarity solutions for system (1.5) is therefore available via the approach used in this
chapter than was retrievable by applying Lie classical analysis to the equivalent system
(4.3) in Chapter 4.
Chapter 6 provides a description of the variety of symmetry groups available for the thin
film equation (1.1) by the method of symmetry-enhancing constraints [29] upon
incorporating nontrivial functions into an enlarged system (of which system (4.2) is
illustrative) resulting from the partitioning of equation (1.1). Goard and Broadbridge
discussed the introduction of such functions into an enlarged system arising from the
partitioning of the original target equation(s) with respect to the axisymmetric boundary
layer equations [29].
In chapter 7 we studied the thin film equation (1.1) from the perspective of a method of
obtaining potential symmetries presented by Bluman, Reid and Kumei [17]. We found
no new symmetry groups to arise for this equation via this method.
The studies undertaken in this thesis indicate that for the thin film equation (1.1), the
method of symmetry-enhancing constraints [29] can be successfully extended by the
incorporation of the non-classical procedure [16, 36] in addition to the Lie classical

203
method, as Saccomandi concluded with respect to the steady two-dimensional boundary-
layer equations in the flat and axisymmetric cases [47].
A survey of current literature in this field has demonstrated the viability of this method
in deriving additional symmetry groups and solutions for systems of equations within
disciplines such as physics and biomathematics. This approach has generated new
similarity solutions to equations such as the axisymmetric boundary layer equations [29].
Goard and Broadbridge emphasised the derivation of new symmetry groups by applying
Lie classical analysis to the enlarged system resulting from partitioning the equations of
interest, in keeping with the principles of the method of symmetry-enhancing constraints
[29]. However, these authors mentioned that classical and non-classical symmetry
analysis on different partitions of the axisymmetric boundary layer equations will
produce different solutions [29].
Research conducted in this area has indicated that solutions to practical partial
differential equations are retrievable by classical reductions of a system of equations
enlarged by the addition of symmetry-enhancing constraints chosen to elicit larger
symmetry groups than those of the original equation(s). Correspondingly, new solutions
have emerged hitherto considered unrelated to classical and non-classical symmetries
and which are unobtainable by applying Lie classical analysis and the non-classical
symmetry method of Bluman and Cole [16] to the original equation(s).

204
BIBLIOGRAPHY
[1] Bayada G. and Chambat M., “On The Various Aspects Of The Thin Film
Equation In Hydrodynamic Lubrication When The Roughness Occurs” , RMA:
Research Notes In Applied Mathematics 4 (1987), 15 – 30.
[2] Becker J., Grun G., Lenz M. and Rumpf M., “Numerical Methods For Fourth
Order Nonlinear Degenerate Diffusion Problems” , Applications of Mathematics
47 (6) (2002), 517 – 543.
[3] Beretta E. and Bertsch M., “Some Special Solutions Of The Thin-Film
Equation” , Differential And Integral Equations 14 (11) (2001), 1281-1300.
[4] Beretta E., Bertsch M. and Dal Passo R., “Nonnegative Solutions Of A Fourth
Order Nonlinear Degenerate Parabolic Equation” , preprint.
[5] Bernis F., “Viscous Flows, Fourth Order Nonlinear Degenerate Parabolic
Equations And Singular Elliptic Problems” , Free Boundary Problems: Theory
And Applications (Pitman Research Notes In Mathematics, 323) eds. J.I. Diaz,
M.A. Herrero, A. Linan and J.L. Vazquez (Harlow: Longman), (1995), 40 – 56.
[6] Bernis F. and Ferreira R., “Source-Type Solutions To Thin-Film Equations: The
Critical Case” , Applied Mathematics Letters 12 (7) (1999), 45 – 50.
[7] Bernis F., Hulshof J. and Quiros F., “The ‘Linear’ Limit Of Thin Film Flows
As An Obstacle-Type Free Boundary Problem” , SIAM Journal On Applied
Mathematics 61 (3) (2000), 1062 – 1079.
[8] Bernis F., Peletier L.A. and Williams S.M., “Source Type Solutions Of A Fourth
Order Nonlinear Degenerate Parabolic Equation” , Nonlinear Analysis –
Theory Methods And Applications 18 (1992), 217 – 234.
[9] Bernoff A.J. and Witelski T.P., “Linear Stability Of Source-Type Similarity
Solutions Of The Thin Film Equation” , Applied Mathematics Letters 15
(2002), no. 5, 599 – 606.
[10] Bertozzi A.L., “Symmetric Singularity Formation In Lubrication-Type
Equations For Interface Motion” , SIAM Journal On Applied Mathematics 56
(1996), 681 – 714.
[11] Bertozzi A.L. and Brenner M.P., “Linear Stability And Transient Growth In
Driven Contact Lines” , Physics Of Fluids 9 (1997), 530 – 539.

205
[12] Bertozzi A.L., Brenner M.P., Dupont T.F. and Kadanoff L.P., “Singularities
And Similarities In Interface Flows” , Trends And Perspectives In Applied
Mathematics, L.Sirovich, ed., Applied Mathematical Sciences 100, Springer –
Verlag, Berlin (1994), 155 – 208.
[13] Bertozzi A.L., Munch A., Fanton X. and Cazabat A.M., “Contact Line
Stability And ‘Undercompressive Shocks’ In Driven Thin Film Flow” , Physical
Review Letters 81 (1998), 5169 – 5172.
[14] Bertozzi A.L. and Shearer M., “Existence Of Undercompressive Traveling
Waves In Thin Film Equations” , SIAM Journal On Mathematical Analysis 32
(1) (2000), 194 – 213.
[15] Bluman G.W. and Cole J.D., “The General Similarity Solution Of The Heat
Equation”, Journal of Mathematics and Mechanics 18 (1969), 1025 – 1042.
[16] Bluman G.W. and Cole J.D., “Similarity Methods For Differential Equations”,
Applied Mathematical Sciences 13 (1974), Springer - Verlag, New York.
[17] Bluman G.W., Reid G.J. and Kumei S., “New Classes Of Symmetries For Partial
Differential Equations” , Journal Of Mathematical Physics 29 (4) (1988), 806 –
811.
[18] Boatto S., Kadanoff L.P. and Olla P., “Traveling-Wave Solutions To Thin-Film
Equations” , Physical Review E. Statistical, Nonlinear, And Soft Matter Physics
48 (6) (1993), 4423 – 4431.
[19] Brenner M.P. and Bertozzi A.L., “Spreading Of Droplets On A Solid Surface” ,
Physical Review Letters 71 (1993), 593 – 596.
[20] Burde G.I., “New Similarity Reductions Of The Steady-State Boundary Layer
Equations” , Journal Of Physics A: Mathematical And General 29 (1996), 1665 -
1683.
[21] Carrillo J.A. and Toscani G., “Long-Time Asymptotics For Strong Solutions Of
The Thin Film Equation” , Communications In Mathematical Physics 225 (3)
(2002), 551-571.
[22] Clarkson P.A. and Kruskal M.D., “New Similarity Reductions Of The
Boussinesq Equation” , Journal Of Mathematical Physics 30 (1989), 2201 –
2213.

206
[23] Constantin P., Dupont T.F., Goldstein R.E., Kadanoff L.P., Shelley M.J. and
Zhou Su-Min, “Droplet Breakup In A Model Of The Hele-Shaw Cell” , Physical
Review E. Statistical, Nonlinear, And Soft Matter Physics 47 (1993), 4169 –
4181.
[24] Dennemeyer R., “Introduction to Partial Differential Equations and Boundary
Value Problems” , McGraw-Hill, New York, 1968.
[25] Dupont T.F., Goldstein R.E., Kadanoff L.P. and Zhou Su-Min, “Finite-Time
Singularity Formation In Hele-Shaw Systems” , Physical Review E. Statistical,
Nonlinear, And Soft Matter Physics 47 (1993), 4182 – 4196.
[26] Ferreira R. and Bernis F., “Source-Type Solutions To Thin-Film Equations In
Higher Dimensions” , European Journal Of Applied Mathematics 8 (5) (1997),
507 – 524.
[27] Gandarias M.L., “Classical Point Symmetries Of A Porous Medium
Equation” , Journal Of Physics A: Mathematical And General 29 (1996), 607 -
633.
[28] Gandarias M.L., “Nonclassical Symmetries Of A Porous Medium Equation
With Absorption” , Journal Of Physics A: Mathematical And General 30 (1997),
6081 - 6091.
[29] Goard J. and Broadbridge P., “Solutions To Nonlinear Partial Differential
Equations From Symmetry - Enhancing And Symmetry - Preserving
Constraints” , Journal Of Mathematical Analysis And Applications 238
(1999), 369 – 384.
[30] Goldstein R.E., Pesci A.I. and Shelley M.J., “Topology Transitions And
Singularities In Viscous Flows” , Physical Review Letters 70 (1993), 3043 –
3046.
[31] Grun G., “On Bernis’ Interpolation Inequalities In Multiple Space Dimensions” ,
Zeitschrift fur Analysis und ihre Anwendungen. Journal For Analysis And Its
Applications 20 (4) (2001), 987 – 998.
[32] Grun G., “Droplet Spreading Under Weak Slippage: The Waiting Time
Phenomenon” , Annales de l’Institut Henri Poincare. Analyse Non Lineaire 21
(2) (2004), 255 – 269.
[33] Grun G. and Rumpf M., “Entropy Consistent Finite Volume Schemes For The
Thin Film Equation” , Finite Volumes For Complex Applications II, Hermes
Sci. Publ., Paris (1999), 205 – 214.

207
[34] Hastings S. P. and Peletier L.A., “On Self-Similar Solutions Of The Thin Film
Equation When n = 3” , Differential And Integral Equations 11 (1) (1998), 1-22.
[35] Higham N.J., “Handbook Of Writing For The Mathematical Sciences” , siam.
Society for Industrial and Applied Mathematics, 1998.
[36] Hill J.M., “Differential Equations And Group Methods For Scientists And
Engineers” , CRC Press, Boca Raton, Florida, 1992.
[37] Hulshof J., “A Local Analysis Of Similarity Solutions Of The Thin Film
Equation” , GAKUTO International Series. Mathematical Sciences And
Applications 7 (1995). Nonlinear Analysis And Applications (Warsaw, 1994),
179 – 192.
[38] Hulshof J., “Some Aspects Of The Thin Film Equation” , European Congress Of
Mathematics, Volume II (2000), 291 – 301.
[39] Hulshof J. and Shishkov A.E., “The Thin Film Equation With 2 ≤ n < 3: Finite
Speed Of Propagation In Terms Of The L1-Norm” , Advances In Differential
Equations 3 (5) (1998), 625 – 642.
[40] Johnson M.F.G., Schluter R.A., Miksis M.J. and Bankoff S.G., “Experimental
Study Of Rivulet Formation On An Inclined Plate By Fluorescent Imaging” ,
Journal Of Fluid Mechanics 394 (1999), 339 – 354.
[41] Khayat R.E. and Kim Kyu-Tae, “Influence Of Initial Conditions On Transient
Two-Dimensional Thin-Film Flow” , Physics Of Fluids 14 (12) (2002), 4448 –
4451.
[42] Kim Kyu-Tae and Khayat R.E., “Transient Coating Flow Of A Thin Non-
Newtonian Fluid Film” , Physics Of Fluids 14 (7) (2002), 2202 – 2215.
[43] King J.R. and Bowen M., “Moving Boundary Problems And Non-Uniqueness
For The Thin Film Equation” , European Journal Of Applied Mathematics 12
(2001), no. 3, 321 – 356.
[44] Kondic L., “Instabilities In Gravity Driven Flow Of Thin Fluid Films” , SIAM
Review 45 (1) (2003), 95 – 115.
[45] Laugesen R.S. and Pugh M.C., “Linear Stability Of Steady States For Thin
Film And Cahn-Hilliard Type Equations” , Archive For Rational Mechanics
And Analysis 154 (2000), no. 1, 3 – 51.
[46] Putz J.F., “Maple Animation” , Chapman and Hall, CRC, 2003.

208
[47] Saccomandi G., “A Remarkable Class Of Non-Classical Symmetries Of The
Steady Two-Dimensional Boundary-Layer Equations” , Journal Of Physics A:
Mathematical And General 37 (27) (2004), 7005 – 7017.
[48] Sanchez D.A., Allen R.C. and Kyner W.T., “Differential Equations” ,
Addison-Wesley Publishing Company, Reading, Massachusetts, 1988.
[49] Starov V.M., “Spreading Of Droplets Of Nonvolatile Liquids Over A Flat Solid
Surface” , English Translation: Colloid Journal USSR (USA) 45 (6) (1983), 1009
– 1015. (Russian Original: Kolloidn. Zh. 45 (6) (1983), 1154 – 1161.)
[50] Tanner L.H., “The Spreading Of Silicone Oil Drops On Horizontal Surfaces” ,
Journal Of Physics D: Applied Physics 12 (1979), 1473 – 1484.
[51] Troian S.M., Herbolzheimer E., Safran S.A. and Joanny J.F., “Fingering
Instabilities Of Driven Spreading Films” , Europhysics Letters 10 (1989), 25–30.
[52] van de Fliert B.W., “A Free Boundary Problem For Evaporating Layers” ,
Nonlinear Analysis 47 (3) (2001), 1785 – 1796.
[53] van den Berg J.B., Bowen M., King J.R. and El-Sheikh M.M.A., “The Self-
Similar Solution For Draining In The Thin Film Equation” , European Journal Of
Applied Mathematics 15 (3) (2004), 329 – 346.
[54] Wolfram S., “Mathematica - A System for Doing Mathematics by Computer” ,
Second Edition, Addison-Wesley Publishing Company, Inc., Redwood City,
California, 1991.
Additional References
[55] Bluman G. and Kumei S., “Symmetries and Differential Equations” ,
Springer-Verlag, New York, 1989.
[56] Ibragimov N., ed., “CRC Handbook of Lie Group Analysis of Differential
Equations, Vol. 1. Symmetries, Exact Solutions and Conservation Laws” , CRC
Press, Boca Raton, 1994.
[57] Olver P., “Applications of Lie Groups to Differential Equations” , Springer-
Verlag, New York, 1986.
[58] Ovsiannikov L., “Group Analysis of Differential Equations” , Academic Press,
New York, 1982.