sustainable mobility and intermodality promoting … ref : date : gali-g3a-tn01 20 june 2003 galileo...
TRANSCRIPT

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 1
Kongsberg Maritime
Sustainable Mobility and IntermodalityPromoting Competitive and Sustainable Growth
GALILEI Task GG3A: Maritime Standardisation StudiesGalileo performance vs maritime GNSS
requirements
Written by Responsibility - Company Date Signature
John O. Klepsvik Task leader - Kongsberg Seatex AS 30/06/2003
Verified by
Gard Ueland Vice Pres. R&D – Kongsberg Seatex 30/06/2003
Certified by
Gerard Alcouffe Coordinator – Thales Aviation 30/06/2003
WBS Code : G3A4Classification : PU

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 2
Kongsberg Maritime
THE INFORMATION IN THIS DOCUMENT IS PROVIDED AS ISAND NO GUARANTEE OR WARRANTY IS GIVEN THAT THE
INFORMATION IS FIT FOR ANY PURPOSE. THE USER THEREOFUSES THE INFORMATION AT ITS SOLE RISK AND LIABILITY.
FURTHERMORE, DATA, CONCLUSIONS ORRECOMMENDATIONS IN THIS REPORT ARE PROVIDED ON THE
BASIS THAT SUCH INFORMATION IS SUBSEQUENTLY, ANDPRIOR TO USE, VERIFIED BY THE PARTY WISHING TO USE
THAT INFORMATION.

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 3
Kongsberg Maritime
CHANGE RECORDS
ISSUE DATE § : CHANGE RECORD AUTHOR
Draft 28/02/2003 First issue. John O. Klepsvik
1.0 03/06/2003 After internal document review. Chapter 6:Standardisation Issues included
John O. Klepsvik
1.1 20/06/2003 After GISS review. Analyses and results fromGALI-G3A-DD101v2.0 included in the report
John O. Klepsvik

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 4
Kongsberg Maritime
TABLE OF CONTENTS
1 INTRODUCTION............................................................................................................................ 8
1.1 SCOPE OF THE DOCUMENT ................................................................................................. 81.2 OBJECTIVES.............................................................................................................................. 8
2 REFERENCES ................................................................................................................................. 9
2.1 ACRONYMS ............................................................................................................................... 92.2 APPLICABLE DOCUMENTS ................................................................................................ 112.3 REFERENCE DOCUMENTS.................................................................................................. 11
3 BACKGROUND............................................................................................................................. 13
3.1 WORLD-WIDE RADIO NAVIGATION SYSTEM .............................................................. 133.2 FUTURE GLOBAL NAVIGATION SATELLITE SYSTEM .............................................. 141.3 CURRENT REVISIONS OF A.815(19) AND A.860(20) ....................................................... 15
4 IMO OPERATIONAL REQUIREMENTS OF A FUTURE GNSS.......................................... 17
4.1 SERVICE PERFORMANCE PARAMETERS...................................................................... 174.1.1 Accuracy ..................................................................................................................................174.1.2 Integrity ...................................................................................................................................184.1.3 Continuity ................................................................................................................................184.1.4 Availability ..............................................................................................................................194.2 ON THE USE OF PROBABILITIES – NUMERICAL VALUES........................................ 194.3 IMO SERVICE PERFORMANCE DEFINITIONS .............................................................. 224.4 IMO PERFORMANCE REQUIREMENTS ACCORDING TO THE REVISEDA.815(19)............................................................................................................................................... 234.5 IMO PERFORMANCE REQUIREMENTS ACCORDING TO A.915(22) ........................ 24
5 GALILEO SERVICE PERFORMANCE EVALUATION ........................................................ 27
5.1 THE GALILEO NAVIGATION SERVICES......................................................................... 275.1.1 Nominal service performance ................................................................................................275.1.2 The Galileo Integrity Concept ...............................................................................................285.2 GALILEO SERVICE PERFORMANCE VS IMO A. 815(19) ............................................. 285.2.1 Constellation parameters .......................................................................................................292.6.1 UERE Models ..........................................................................................................................295.2.2 Galileo Open Service (OS)......................................................................................................305.2.2.1 Integrity enhancement .........................................................................................................315.2.2.2 Continuity of service ............................................................................................................325.2.3 Galileo Safety of Life Service (SoL).......................................................................................323.2.1 Galileo horisontal positioning accuracy for different constellation states .........................335.2.4 Compliance with IMO Res. A.815(19) Operational Performance Requirements.............34
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 5
Kongsberg Maritime
5.3 GALILEO SERVICE PERFORMANCE VS IMO A. 915(22) ............................................. 355.3.1 Critical vs non-critical operation...........................................................................................365.3.2 Accuracy, integrity and continuity ........................................................................................375.3.3 Availability ..............................................................................................................................375.3.4 Evaluation parameters ...........................................................................................................375.3.4.1 Constellation states...............................................................................................................375.3.4.2 EURE budgets .....................................................................................................................385.3.5 Simulation parameters ...........................................................................................................385.3.5.1 Failure statistics....................................................................................................................385.3.6 Evaluation results ...................................................................................................................405.3.6.1 Positioning accuracy ............................................................................................................405.3.6.2 Continuity of accuracy.........................................................................................................425.3.6.3 Integrity.................................................................................................................................435.3.7 Galileo SoL service compliance with IMO Res. A.915(22)..................................................44
6 STANDARDISATION ISSUES .................................................................................................... 46
6.1 MARITIME STANDARDISATION ....................................................................................... 466.2 GNSS RECEIVERS .................................................................................................................. 476.2.1 Recognition of new components to the WWRNS.................................................................476.2.2 Receiver certification ..............................................................................................................486.2.3 Existing Receiver Standards ..................................................................................................496.3 MARITIME GALILEO RECEIVER STANDARDISATION.............................................. 496.3.1 IMO standardisation process.................................................................................................496.3.2 Amendment of interface standards .......................................................................................496.3.3 New IEC test standards ..........................................................................................................50
7 CONCLUSIONS............................................................................................................................. 51
ANNEX : IMO RES. A.915 (22) REVISED MARITIME POLICY ANDREQUIREMENTS FOR A FUTURE GLOBAL NAVIGATION SATELLITE SYSTEM(GNSS) – APPENDIX 2 AND 3 .......................................................................................................... 52

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 6
Kongsberg Maritime
LIST OF FIGURES
Figure 1 Dependency and hierarchy of service performance parameters ............................... 17Figure 2 Graph of the one-sigma Global SIS-UERE values.................................................. 30Figure 3 Horisontal accuracy (95%) of the nominal constellation for a masking angle of 10º
at an availability of 99.8% and using the OS-1 (Single-frequency) UERE..................... 30Figure 4 Number of satellites in view of the nominal constellation for a masking angle of 10º
at an availability of 99.8% using the OS-2 (dual-frequency) UERE ............................... 32Figure 5 Horisontal accuracy (95%) of the nominal constellation for a masking angle of 10º
at an availability of 99.8% using the SOL UERE............................................................ 33Figure 6 Graph of the one-sigma Global SIS-UERE values.................................................... 38Figure 7 Horisontal accuracy (95%) of the nominal constellation for a masking angle of 10º
at an availability of 99.8% using the GalileoL1 + E5 UERE .......................................... 40Figure 8 Worst case Horisontal accuracy (95%) for a masking angle of 10º at an availability
of 99.8% using the Galileo L1+E5 UERE....................................................................... 41Figure 9 Worst case Minimum Number of satellites in view for a masking angle of 10º at an
availability of 99.8% using the Galileo L1+E5 UERE.................................................... 41Figure 10 Continuity risk for a critical operation period of 3 hours for a horisontal accuracy
better than 4 m ................................................................................................................. 42Figure 11 Continuity risk for a critical operation period of 3 hours for a horisontal accuracy
better than 10 m ............................................................................................................... 42Figure 12 Availability of the Horisontal Protection Level using the weighted RAIM FD
algorithm for a masking angle of 10º using the Galileo L1+E5 UERE. .......................... 43Figure 13 Standardisation bodies involved at the international level ..................................... 46Figure 14 Receiver certification according to MED............................................................... 48Figure 15 Receiver certification – typical scenario ................................................................. 50
LIST OF TABLES
Table 1 Allowed downtime against level of availability ....................................................... 20Table 2 Safety levels and corresponding severity of effects and safety criteria for vessel
performance ..................................................................................................................... 21Table 3 Occurrences and acceptable probabilities according to severity of their consequences
......................................................................................................................................... 21Table 4 IMO Performance Requirements according to proposed revision of A.815(19)........ 24Table 5 IMO minimum maritime user requirements for general navigation. ......................... 26Table 6 Nominal service performance for Galileo navigation services................................. 27Table 7 Constellation parameters .......................................................................................... 29Table 8 One-sigma values of the UERE (in meters).............................................................. 29
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 7
Kongsberg Maritime
Table 9 Horisontal accuracy (95%) of the nominal and degraded constellation states for amasking angle of 10º and availability levels of 99.5% and 99.8%. Accuracies < 10m arehighlighted ....................................................................................................................... 34
Table 10 Table of compliance between Galileo navigation services using the Galileoconstellation and IMO operational performance requirements as given in IMO Res.A.815(19)......................................................................................................................... 35
Table 11 Service performances for the Galileo Safety of Life Services (HLD Issue 3)........ 36Table 12 Probability of the Galileo constellation states over 20 years................................... 37Table 13 One-sigma values of the UERE (in meters).............................................................. 38Table 14 Satellite reliability parameters for the Galileo constellation used in simulations..... 39Table 15 Proposed service performances for the Galileo SoL service .................................. 45

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 8
Kongsberg Maritime
1 INTRODUCTION
1.1 SCOPE OF THE DOCUMENT
This technical note has been produced as part of the Galilei project Task G3A ‘MaritimeApplication Studies’ and provides a limited study of the performance of the Galileonavigation services within the context of the maritime GNSS requirements as defined in IMOResolutions A.815(19) on World-wide Radionavigation Systems and A.915(22) on MaritimePolicy for a future Global Navigation Satellite System (GNSS).The study provides technical support for a planned submission on Galileo to the IMO NAV49 Sub-committee meeting, and adresses the major issues related to the operational maritimerequirements for an improved global radio-navigation service, i.e. accuracy, integrity,continuity and availability.In addition, the report includes a ‘road map’ description for standardisation and certificationof Galileo receivers for general maritime navigation.
1.2 OBJECTIVES
The objective of the SAGA project and the complementary Galilei Task G project is toinitiate the standardisation process within the various modes of transport and otherapplications subject to regulations. For maritime applications it is of great importance toanalyse the different existing and proposed requirements for GNSS to ensure that the Galileomission and system requirements are in compliance with these requirements.
A preliminary study was issued within the scope of the SAGA project (SAGA WP 4000Maritime) and later revised and included in the first delivery (GALI-G3A-DD101v2.0) of theGalilei Task G3A project. The objective was to explain the characteristics of Galileo tomaritime standardisation bodies and maritime authorities within the context of the WWRNS.
However, most of the Galileo service definition work up to now has been “designed” toprovide adequate performance for the different phases of navigation for civil aviation, and theservice specifications given for Galileo in the HLD, MRD and SRD needs to be evaluatedusing operational parameters applicable to the maritme segment.The objective of this document is therefore to provide a preliminary evaluation of the Galileoservice requirements, notably the Safety of Life service, with reference to IMO ResolutionsA.815(19) on World-wide Radionavigation Systems and A.915(22) on Maritime Policy for afuture Global Navigation Satellite System (GNSS).IMO Res. A.815(19) gives the present formal requirements and procedures for accepting newsystems as ‘components’ of the World-Wide Radionavigation System, while IMO Res.A.915(22) addresses maritime requirements for future developments of GNSS to beconsidered within the framework of WWRNS (IMO Res. A.815(19).

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 9
Kongsberg Maritime
2 REFERENCES
2.1 ACRONYMS
AIS Shipborne Automatic Identification Systems
CAIM Craft Autonomous Integrity Monitoring
CAT I-III Category I-III landing systems for airports
COMSAR Subcommittee for Communication and Search and Rescue within IMO/MSC
CS Commercial service
DGPS Differential GPS
DGNSS Differential GNSS
EGNOS European Geostationary Navigation Overlay Service
ESA European Space Agency
FD Fault detection
FDE Fault detection and exclusion
GALA Galileo Architecture Definition
GalileoSat Galileo Space Segment and related Ground Segment
GIC Ground Integrity Channel
GLONASS Global Navigation Satellite System
GMDSS Global Maritime Distress and Safety System
GNSS Global Navigation Satellite System
GPS Global Positioning System
HAL Horisontal Alert limit
HLD High Level Document
HPL Horisontal Protection Limit
IALA International Aids to navigation and Lighthouse Authority
ICAO International Civil Aviation Organisation
IMO The International Maritime Organisation
IMS Integrity Monitoring Station
ITU International Telecommunication Union
MDE Marginally Detectable Error

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 10
Kongsberg Maritime
MEO Medium Earth Orbit
MMSI Maritime Mobile Service Identity
MRD Mission Requirements Document
MSC Maritime Safety Committee of IMO
MTBF Mean time between failure
MTTR Mean Time To Repair
NAV Subcommittee for Safety of Navigation within IMO/MSC
OS Open service
OSS Orbitary and Synchronisation Station
Pfa Probability of false alarm
Pmd Probability of missed detection
PRS Public Regulated Service
PVT Position, velocity, time
RAIM Receiver Autonomous Integrity Monitoring
RAM Reliability, Availability and Maintainability
RTCA Radio Technical Commission for Aviation
RTCM Radio Technical Commission for Maritime
SAGA Standardisation Activities for Galileo
SAR Search and rescue
SoL Safety-of-life service
SIS Signal-in-Space
SOLAS Safety of Life at Sea, IMO Convention
SRD System Requirements Document
TBC To be completed
TBD To be defined
TTA Time to alarm
TTC Tracking, Telemetry, Command
UERE User equivalent ranging error
UKOOA United Kingdom Offshore Operators Association
USCG US Coast Guard
VAL Vertical alert limit

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 11
Kongsberg Maritime
VDL VHF Data Link
WWRNS World-Wide Radionavigation System
WAAS Wide Area Augmentation System
2.2 APPLICABLE DOCUMENTS
ApplicableDocumentNumber
Document Name Ref. no Issue Date
AD1 Mission High Level Definition (HLD) 2 03/04/2001AD2 Mission Requirements Document (MRD) EC-GALILEO
MRDV5.1.1 27/03/2003
AD3 System Requirements Document (SRD) ESA-APPNS-REQ-00011
2 11/03/2002
2.3 REFERENCE DOCUMENTS
ReferenceDocumentNumber
Document Name Ref. no Issue Date
RD1 Revision of resolution A.815(19) on World-wide radionavigation system
NAV 47/7/1MSC 75/24/Add.1
1 22/03/2001may 2002
RD2 Revised maritime policy and requirementsfor a future global navigation satellite system(GNSS)
IMO Res.A.915(22)
Nov. 2001
RD3 Elcano: User’s Guide, GMV 10/01/02RD4 Galileo Overall Architecture Definition:
Performance and ConstellationGALA-ASPI-DD-012
3 06/11/2000
RD5 Guidelines for the use of Differential GPS inOffshore Surveying
UKOOA 1994 3rd
draftMay, 1994
RD6 MOPS for GPS/WAAS RTCA/DO229 Nov. 2001RD7 Galilei Task E: System Interoperability
Analysis-Receiver Issues for Nav and NonNav Systems
NAV/02/004621 03 Sept 2002
RD8 GISS, Private communication Dec 2002RD9 Final report on Maritime Applications:
Assessment of main standardisation issuesand recommendations for further work
SAGA - D10 Dec. 2000
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 12
Kongsberg Maritime
RD10 Maritime Equipment Directive Council Directive96/98/EC
11/11/1998
RD11 MED Amendment CommissionDirective2002/75/EC
02/09/2002

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 13
Kongsberg Maritime
3 BACKGROUND
3.1 WORLD-WIDE RADIO NAVIGATION SYSTEM
In 1985, IMO initiated a study into a world-wide satellite position-fixing system for the safetyof navigation and a report, Study of a World-Wide Radionavigation System, was adopted bythe IMO Assembly in 1989 (resolution A.666(16).
The report gave a detailed summary of the different terrestrial-based radio navigation systemsthen in operation (Differential Omega, Loran-C, Chayka), and also the satellite systems whichwere being developed - Global Positioning System (GPS) Standard Positioning Service(SPS), which was being developed by the United States Air Force; and GLONASS (GlobalNavigation Satellite System), being developed by the then Soviet Union (now managed forthe Government of the Russian Federation by the Russian Space Agency.
The 1989 report said that it was not considered feasible for IMO to fund a world-wideradionavigation system, so existing and planned systems provided and operated byGovernments or organizations were studied to ascertain whether they could be recognized oraccepted by IMO.When a radio-navigation system is accepted by IMO, it means the system is regarded ascapable of providing adequate position information and that the carriage of receivingequipment satisfies the relevant SOLAS requirements.
The report notes that shipborne receiving equipment should conform to the generalrequirements for navigational equipment in resolution A.574(14) (later updated by A.694(17)and that detailed requirements for receivers for GPS, differential GPS, GLONASS,differential GLONASS, Loran-C, Chayka, Omega combined with differential Omega andDecca Navigator systems were available to manufacturers to enable them to construct theequipment.
The report set operational requirements for world-wide radionavigation systems: they shouldbe general in nature and be capable of being met by a number of systems. All systems shouldbe capable of being used by an unlimited number of ships. Accuracy should at least complywith the standards set out in resolution A.529(13) Accuracy of Standards for Navigation.
1995 update
The report was updated in 1995 by resolution A.815(19), World-Wide Radionavigationsystem, which takes into account the requirements for general navigation of ships engaged oninternational voyages anywhere in the world, as well as the requirements of the GlobalMaritime Distress and Safety System (GMDSS) for the provision of position information.
The revised report also addresses the development of high speed craft, such as fast ferries,noting that ships operating at speeds above 30 knots may need more stringent requirements.
The report states that provision of a radionavigation system is the responsibility ofgovernments or organizations concerned and that these should inform IMO that the system isoperational and available for use by merchant shipping while keeping IMO informed in goodtime of any changes that could affect the performance of shipborne receiving equipment.Updated performance standards for Decca Navigator and Loran-C and Chayka receivers and
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 14
Kongsberg Maritime
performance standards for shipborne global positioning system (GPS) receiver equipmentwere also adopted in 1995. By then, GPS was fully operational, while GLONASS becamefully operational in 1996.
The future for terrestrial-based radio-navigation systems - in view of the development of thesatellite-based systems - is unclear. OMEGA was phased out in 1997 while DECCA wasphased-out in most countries by the year 2000. The United States-controlled LORAN-Cnetworks are under consideration for phasing out, however, the 1999 Federal RadionavigationPlan states that ‘While the Administration continues to evaluate the long-term need forcontinuation of the Loran-C radionavigation system, the Government will operate the Loran-C system in the short term.’The Russian Federation-controlled CHAYKA networks will not be considered for phasing outuntil at least the year 2010. Civil-controlled LORAN-C and LORAN-C/CHAYKA networksare in operation in the Far East, North-West Europe (NELS) and other parts of the world withplans for extension in some areas. The future of the NELS network, including the Eurofixservice is, also uncertain. At the May 2001 meeting of the NELS Steering Committee, severalmember nation representatives presented statements reflecting that without a significantmultimodal increase in the use of the system, a continuation of NELS beyond 2005 as asystem funded over member nations public budgets would not be possible. A most likelyevent is that the NELS organisation as such would be discontinued as of 31 December 2005,
Meanwhile, there are several initiatives to improve the performance of GPS and GLONASSby augmentation. The use of different differential correction signals for local augmentation ofaccuracy and integrity and RAIM (Receiver Autonomous Integrity Monitoring) are examplesof such initiative. In addition integrated receivers are being developed, combining signalsfrom GPS, GLONASS, LORAN-C and/or CHAYKA. Wide area augmentation systems arealso being developed disseminating integrity information and differential correction signalsfrom geostationary satellites (WAAS, EGNOS MSAS).
IMO (and other users, such as civil aviation) has recognised the need for a future system toimprove, replace or supplement GPS and GLONASS, which have shortcomings on integrity,availability, control and system life expectancy. As a result, IMO in 1997 adopted resolutionA.860(20) on Maritime policy for a future global navigation satellite system (GNSS).
3.2 FUTURE GLOBAL NAVIGATION SATELLITE SYSTEM
Maritime policy for a future global navigation satellite system (GNSS) sets out IMO policy interms of the maritime requirements for a future civil and internationally-controlled GlobalNavigation Satellite System (GNSS), to provide ships with navigational position-fixingthroughout the world for general navigation, including navigation in harbour entrances andapproaches and other waters in which navigation is restricted. The resolution notes thatdevelopment of a future GNSS is presently only in a design stage and these requirements havebeen limited only to basic user requirements, without specifying the organizational structure,system architecture or parameters. These maritime requirements, as well as the Organization'srecognition procedures, may need to be revised as a result of any subsequent developments.The resolution sets out the general, operational and institutional requirements for a futureGNSS in terms of maritime users and envisages a review of the requirements in 1999 (21stAssembly); consideration of the proposed future GNSS in 2001 (22nd Assembly) andcompletion of the implementation of the proposed GNSS in 2008. The resolution notes thefollowing general requirements for the future GNSS:

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 15
Kongsberg Maritime
• It should primarily serve the operational user requirements for navigation. Formaritime use this includes navigation in harbour entrances and approaches, and otherwaters in which navigation is restricted.
• It should have the operational and institutional capability to meet additional area-specific requirements through local augmentation, if this capability is not otherwiseprovided. Augmentation provisions should be harmonized world-wide to avoid thenecessity of carrying more than one shipborne receiver or other devices.
• It should have the operational and institutional capability to be used by an unlimitednumber of multi-modal users at sea, in the air and on land.
• It should be reliable and of low user cost. With regard to the allocation and recoveryof costs, a distinction should be made between maritime users that rely on the systemfor reasons of safety and other users that primarily profit from the system incommercial or economic terms. Also the interests of both shipping and the coastalstates should be taken into consideration when dealing with allocation and recovery ofcosts.
3.3 CURRENT REVISIONS OF A.815(19) AND A.860(20)
A.815(19)
A new revision of A.815(19) was initiated at NAV 46 in July 2000. In a note by the IMOSecretariat in March 2000, the Sub-committee on Safety of Navigation (NAV) was requestedto consider the US Coast Guard Maritime DGPS service as a candidate component of theWWRNS in accordance with the provisions of Res. A.815(19). The request was based on acommunication from the Commandant of the USCG regarding the availability of theMaritime DGPS service ‘for the foreseeable future, on a continous basis and free of directuser fees’.
However, the Sub-committee recalled that the system availability for DGPS service of 99.8%calculated over a 30-day period as required by resolution A.815(19) was proving difficult toachieve in practice, and that IALA was studying the matter. It was therefore concluded that itwas premature at present to recognise the DGPS maritime service offered by the US and thatresolution A.815(19) should be revised.
A new agenda item “Review of resolution A.815(19) on WWRNS” was adopted for theNAV 47 meeting in July 2001, and IALA was given the responsibility to draft the newrevision. The draft revision was issued in March 2001. While the operational requirementsof the original resolution only had two area categories:
• Harbour entrances and approaches and other waters in which the freedom tomanoeuvre is limited, and
• Other waters,
the draft resolution introduced a new segmentation of navigation areas:
1. Harbour entrances, harbour approaches and coastal waters with a high volume oftraffic and/or a significant degree of risk,

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 16
Kongsberg Maritime
2. Harbour entrances, harbour approaches and coastal waters with a low volume oftraffic and/or less significant degree of risk,
3. Ocean waters
The required level of availability was 99.8% calculated over a 30-day period for the originalarea categories. This level was maintained for Ocean waters (area 3), while area 1 (high levelof risk) was changed to 99.8% over 2 years and area 2 (low level of risk) was changed to99.5% over 2 years.
The draft resolution was agreed at NAV 47 with minor changes, adopted MSC 75 (May 15-24, 2002), [RD1], and submitted for approval and subsequent adoption at the 23rd session ofthe Assembly in 2003.
A.860(20) and A.915(22)
A new draft revision of A.860(20) was submitted to IMO in March 2000 by 5European members of IMO (France, Finland, the Netherlands, Sweden and UK). Thedraft revision of A.860(20) came about more or less as a result of the GalileoGEMINUS project. The members of the GEMINUS Maritime User Forum decided toform a new body (December 1999) named the “European Maritime RadionavigationForum (EMRF)” which agreed to take the role of the Maritime User Forum in theGEMINUS project. The EMRF requirements concerning navigation was submitted toIMO in order to revise Res. A.860(20).
The main contribution of the draft revision is the addition of an Appendix 3 whichgives minimum maritime user requirements for positioning, including a list ofrequirements for more than 30 different applications. The requirements are furtheranalysed in chapter 5.3.
The NAV Sub-committee agreed to submit the draft revision to MSC 73 (December2000) which subsequently approved the revision and submission to the 22nd session ofthe IMO Assembly in November 2001.
The revision was finally adopted at 22nd session of the IMO Assembly and was givena new name: Res. A.915(22) Revised Maritime Policy and Requirements for a futureGlobal Navigation Satellite System (GNSS), [RD2].

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 17
Kongsberg Maritime
4 IMO OPERATIONAL REQUIREMENTS OF A FUTUREGNSS
The two resolutions; A.815(19) and A.915(22), forms the backbone of IMO’srequirements for future Maritime Radionavigation Systems. A.815(19) gives theformal requirements and procedures for accepting new systems as ‘components of theWorld-Wide Radionavigation System (WWRNS)’, while A.915(22) is a ‘positioning’document related to requirements for future developments of GNSS to be consideredwithin the framework of A.815(19).
4.1 SERVICE PERFORMANCE PARAMETERS
The main objective for a GNSS is to provide positioning information (PVT) to the user. Thequality of this positioning information is dimensioned in terms of accuracy, integrity,continuity and availability.The navigation service performance assumes a hierarchical structure (Figure 1) withpositioning accuracy as the basic performance parameter.
4.1.1 ACCURACY
IMO res. A.915(22) gives a variety of accuracy definitions (absolute, predictable, relative,repeatable), however, for the purpose of this study we shall only use accuracy in absoluteterms, e.g. with respect to geographic or geodetic co-ordinates of the earth.
Figure 1 Dependency and hierarchy of service performance parameters
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 18
Kongsberg Maritime
For navigation system performance, accuracy can be referred to as the value that bounds the“instantaneous” position error at a specific location and a specific time and within a specificconfidence level. The confidence level for the navigation sensor error is normally specified at95% which means that the given error value has a probability of 95% not to be exceeded.Positioning accuracy is generally a three-dimensional entity and is normally given ashorisontal and vertical accuracies. For general maritime navigation only the horisontalaccuracy is of interest and is specified either as error ellipses giving North and East errors oras a CEP value at a given confidence level (95%).Also associated with the accuracy specification is the geographical coverage area (global,ECAC, etc.)
4.1.2 INTEGRITY
In simple terms, the integrity service is a timely warning that will be issued when the systemfails to provide accurate navigation information. Integrity services includes the associatedTime to Alarm (TTA) requirements, the Horizontal and Vertical Alert Limits (HAL, VAL) andthe Integrity risk.
For the user, Integrity is not assured when the true positioning error exceeds the user’smaximum required accuracy (Alert limit) without an alert for a longer time than the TTA.
Integrity risk is the user defined acceptable level of risk that the receiver outputs HazardousMisleading Information (HMI), also termed an integrity event. In mathematical terms, theintegrity risk is defined as the product of the probability for misleading errors (Pme) and theprobability of missed detection (Pmd). This risk should be assured anywhere and anytime theuser is relying on the GNSS for a critical operation, and consequently the integrity risk isstated in terms of probability of occurrence within a specified critical operation time.As the true positioning error is not known, the integrity service provides information throughthe system which bounds the true instantaneous position error, also called the ProtectionLevel. The integrity service is said to be available when the protection limit can be calculatedand is less than the alert limit.
Externally provided integrity services rely on single or networks of integrity monitoringstations on the ground. The integrity information is disseminated through the navigationsignals. (Galileo), through Geostationary communication satellites (SBAS) or terrestrialcommunication (Maritime Radio Beacons). Alternatively, integrity can be calculated in theuser terminal, utilising redundant satellites (RAIM). The RAIM technique uses anoverdetermined navigation solution to perform a consistency check. RAIM requires aminimum of five visible satellites in ordet to perform fault detection (RAIM FD) and aminimum of six for fault detection and isolation/exclusion (RAIM FDE) of a faulty satellite.Associated with all calculations of Protection Limits based on a statistical analysis is theprobability of false alarm, Pfa, and the probability of missed detection, Pmd. Only misseddetection represents an integrity event, while a false alarm represent a continuity event andmust be specified within the context of the continuity risk.
4.1.3 CONTINUITY
Implicitly continuity addresses both accuracy and integrity together (continuity of integrityand continuity of accuracy). Continuity of the navigation service is defined as: “Theprobability that the accuracy and integrity requirements will be supported by the Navigation

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 19
Kongsberg Maritime
System, over the time interval applicable for a particular operation, within the coverage area,given that they are supported at the beginning of the operation and that they are predicted tobe supported throughout the operation duration”.Routine satellite outages are predicted at least 48 hours in advance of the outage and do notcontribute to a loss of continuity. This assumes that adequate notice is provided to the users.
The Continuity risk is the probability that the system will not provide guidance informationwith the accuracy and integrity required for the intended operation, normally stated in termsof probability of occurrence within a specified (critical) operation time.
Continuity of the service has to be assured anywhere, any time over the critical operationperiod following a certain point in time at which there was no reason to expect a discontinuityof service with a probability higher than the continuity requirement. The statement anywhere,any time prohibits to average over location and/or time and implies to use worst-casegeometry scenario for the system performance analysis of continuity.
4.1.4 AVAILABILITY
Availability is built upon accuracy, integrity and continuity. As shown by Figure 1, it is at thetop of the Service Performance parameter hierarchy. It exists in the context of each of theother three parameters as ‘availability of accuracy’, ‘availability of continuity of accuracy’,‘availability of continuity of integrity of accuracy’, and ‘availability of integrity of accuracy’.Implicitly, availability also addresses the remaining Service Performance parameters and it iscalled “Availability of Navigation Service”. Availability of the Navigation Service is definedas: “the probability that the positioning service and the integrity monitoring service areavailable and provide the required accuracy, integrity and continuity performance “Usually, the service will be declared available when accuracy and integrity requirements aremet at the beginning of an operation and are estimated to be met during the whole operationperiod (equal to continuity requirement). Availability is a characteristic of the service for allthe potential users throughout the lifetime of the system and then is applied to the SIS only. Itis specified in terms of % over the actual period – as “instantaneous” probability.
4.2 ON THE USE OF PROBABILITIES – NUMERICAL VALUES
The different undesirable events may have different orders of acceptable probability. It istherfore convenient to agree on standardised expressions to be used to convey the relativelyacceptable probabilities of various occurrences, i.e. to perform a qualitative ranking process.Probability of occurrence is categorised as frequent, reasonably probable, recurrent, remote,extremely remote and extremely improbable, and different occurrences may have differentacceptable probabilities, according to the severity of their consequences as shown in table 2Effect is a situation arising as a result of an occurrence, and is categorised as minor, major,hazardous or catastrophic.Safety level is a numerical value characterising the relationship between vessel performancerepresented as horisontal single-amplitude acceleration (g) and rate of acceleration (jerk, g/s)and the severity of acceleration load effects on standing and sitting humans. The safety levels
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 20
Kongsberg Maritime
and the corresponding severity of effects on passengers and safety criteria for vesselperformance should be as defined in table 1.
Tables 1 and 2 are reproduced from the IMO HSC Code and originates from the CivilAviation regulations documentation (F.A.R. and JAR-25).
It should be noted that the probability of occurrence associated with the different safety levelsare applicable for complete vessel units, such that sub-systems like Navigation Systemsshould have a probability of failure which is at least an order of magnitude lower.
As a consequence, with the present volume of traffic both for civil aviation and rail, theprobability of occurrence of 10-9 amounts to approximately one catastrophic event per yearfor the civil aviation segment world-wide and one catastrophic event per year for theEuropean rail system.
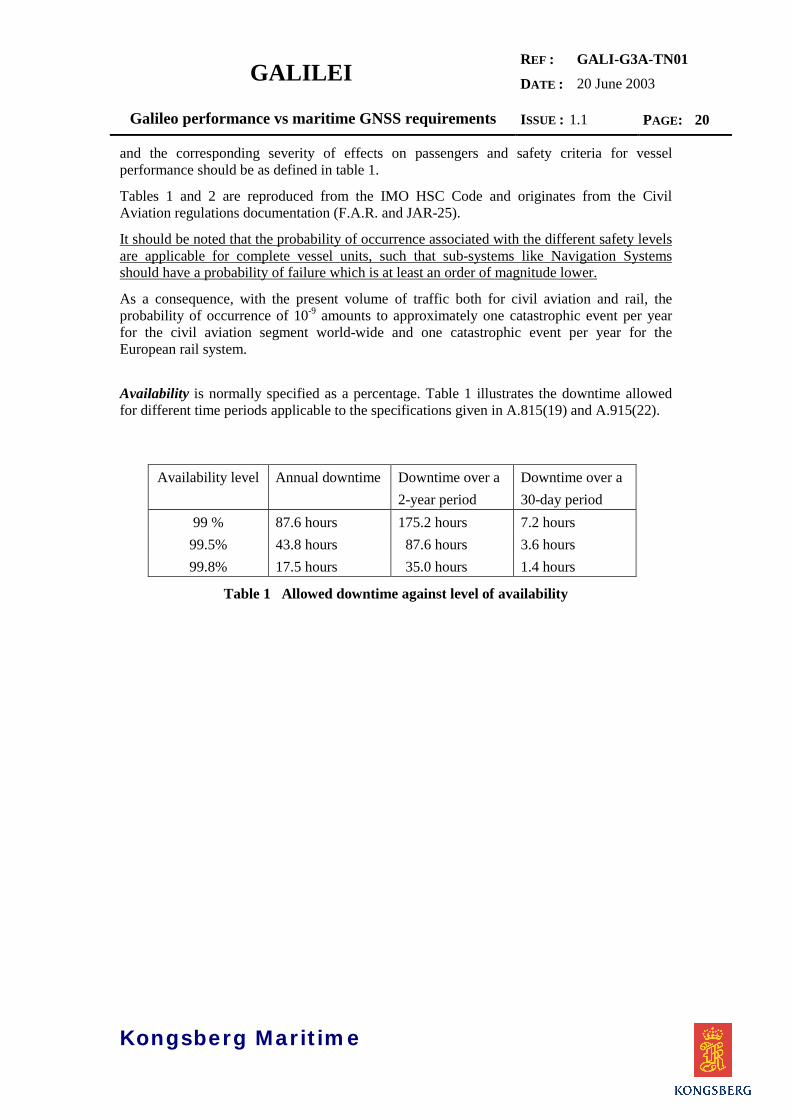
Availability is normally specified as a percentage. Table 1 illustrates the downtime allowedfor different time periods applicable to the specifications given in A.815(19) and A.915(22).
Availability level Annual downtime Downtime over a2-year period
Downtime over a30-day period
99 % 87.6 hours 175.2 hours 7.2 hours99.5% 43.8 hours 87.6 hours 3.6 hours99.8% 17.5 hours 35.0 hours 1.4 hours
Table 1 Allowed downtime against level of availability

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 21
Kongsberg Maritime
CRITERIA NOT TO BE EXCEEDED
EFFECT Type of load Value COMMENTS
LEVEL 1MINOR EFFECTModerate degradationof safety
Maximum accelerationmeasured horizontally 1
0.20g 2 0.08g and 0.20g/s 3: Elderly person will keep balance when holding.0.15g and 0.20g/s: Mean person will keep balance when holding.0.15g and 0.80g/s: Sitting person will start holding.
LEVEL 2MAJOR EFFECTSignificantdegradation of safety
Maximum accelerationmeasured horizontally 1
0.35g 0.25g and 2.0g/s: Maximum load for mean person keeping balance when holding.0.45g and 10g/s: Mean person falls out of seat when not wearing seat belts.
LEVEL 3HAZARDOUSEFFECTMajor degradation ofsafety
Collision design conditioncalculatedMaximum structural designload, based on verticalacceleration at centre ofgravity
Risk of injury to passengers; safe emergency operation after collision.
1.0 g: Degradation of passenger safety.
LEVEL 4CATASTROPHICEFFECT
Loss of craft or/and fatalities.
1 The recording instruments used should be such that acceleration accuracy is better than 5% of the real value and frequencyresponse should be minimum 20 Hz. Anti aliasing filters with maximum passband attenuation 100 +5% should be used.
2 g = gravity acceleration (9.81 m/s2).2 g-rate or jerk may be evaluated from acceleration/time curves.
Table 2 Safety levels and corresponding severity of effects and safety criteria for vesselperformance
SAFETY LEVEL 1 1 1 2 3 4
EFFECT ON VESSEL AND OCCUPANTS
Normal Nuisance Operating limitations
Emergency procedures;significant reduction insafety margins; difficult forcrew to cope with adverseconditions; passengerinjuries.
Large reduction in safetymargins; crew over-burdenbecause of workload orenvironmental conditions;serious injury to a smallnumber of occupants.
Deaths,usually withloss of craft.
F.A.R. 1 PROBABILITY (reference only)
JAR-25 2 PROBABILITY
FREQ
PROBABLE
PROBABLE
UENTREASONABLY
PROBABLE
IMPRO
IMPRO
REMOTE
BABLE
BABLE
EXTREMELY
REMOTE
EXTREMELY
IMPROBABLE
EXTREMELY
IMPROBABLE
10-0 10-1 10-2 10-3 10-4 10-5 10-6 10-7 10-8 10-9
CATEGORY OFEFFECT
MINOR MAJOR HAZARDOUS CATA-STROPHIC
1 United States Federal Aviation Regulations.2 European Joint Airworthiness Regulations.
Table 3 Occurrences and acceptable probabilities according to severity of theirconsequences
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 22
Kongsberg Maritime
4.3 IMO SERVICE PERFORMANCE DEFINITIONS
The following definitions are used at IMO, [RD2]:
Accuracy. The degree of conformance between the estimated or measured parameter of acraft at a given time and its true parameter at that time. (Parameters in this context may beposition coordinates, velocity, time, angle, etc.)
- Absolute accuracy (Geodetic or Geographic accuracy). The accuracy of a positionestimate with respect to the geographic or geodetic coordinates of the Earth.
- Geodetic or Geographic accuracy. See Absolute accuracy.- Predictable accuracy. The accuracy of the estimated position solution with respect
to the charted solution.- Relative accuracy. The accuracy with which a user can determine position relative
to that of another user of the same navigation system at the same time.- Repeatable accuracy. The accuracy with which a user can return to a position
whose co-ordinates have been measured at a previous time using uncorrelatedmeasurements from the same navigation system.
Integrity. The ability to provide users with warnings within a specified time when the systemshould not be used for navigation, also given as the probability of HMI (HazardouslyMisleading Information). Integrity risk is the probability that the GNSS terminal providesinformation which is incorrect in a manner that may result in a hazard to service users.
Continuity. The probability that, assuming a fault free receiver, a user will be able todetermine position with specific accuracy and is able to monitor the integrity of thedetermined position over the (short) time interval applicable for a particular operationwithin a limited part of the coverage area.
Assuming that the service is available at the beginning of an operation, then theprobability that it is still available at a time t later is:
exp( / )−t MTBF
This is the standard expression for reliability and excludes scheduled outages (i.e.uses MTBF) assuming that planned outages will be notified and the operation will nottake place. The probability that the service will be available after a time CTI, that isthe continuity, is then:
C CTI MTBF= −exp( / ) Equation 1
If MTBF >> CTI, this can be approximated to:
C CTI MTBF= −1 ( / ) Equation 2
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 23
Kongsberg Maritime
Where:MTBF = Mean time between failures; based on a two year averaging
period (30 days for the ocean phase)
CTI = Continuity time interval; in the case of maritime continuity,equal to 3 hours
Availability. The percentage of time that an aid, or system of aids, is performing arequired function under stated conditions. The non-availability can be caused byscheduled and/or unscheduled interruptions.
- Signal availability. The availability of a radio signal in a specified coverage area.
- System availability. The availability of a system to a user, including signalavailability and the performance of the user's receiver.
Mathematically this can be written as:
Availability A MTBOMTBO MTSR
( ) =+
Equation 3
Where:MTBO = Mean time between outages; based on a 2-year averagingperiod (30 days for the ocean phase)
MTSR = Mean time to service restoration; based on a 2-yearaveraging period (30 days for the ocean phase)
The MTBO accounts for scheduled and undcheduled service interruptions; i.e.preventive and corrective maintennance.
4.4 IMO PERFORMANCE REQUIREMENTS ACCORDING TOTHE REVISED A.815(19)
The operational performance requirements in the proposed revision of A.815(19) issummarised in Table 4 below. Paragraph 1.3 of the Appendix also states that ‘For shipswith operating speed above 30 knots more stringent requirements may be necessary.
The availability levels of 99.5% and 99.8% corresponds to a downtime of max. 43.8 hoursand 17.5 hours per year averaged over a two year period. The total downtime includesunavailability due to both scheduled maintenance and failures.
The level of continuity, however, only involves failures assuming that scheduled maintenancewill be announced more than 24 hours in advance and can be taken into consideration whenplanning an operation. Thus, the continuity level of 99.85% corresponds to an MTBF of 2000hours, while 99.97% corresponds to an MTBF of 10.000 hours.

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 24
Kongsberg Maritime
Parameter Area with hightraffic/risk
Area with lowtraffic/risk
Ocean
Position accuracy(horisontal, 95%)
≤10 m ≤10 m ≤100 m
Coverage Local 1) Local 1) Global
Update rate 1 2) ≤1 s ≤1 s ≤10 s
Update rate 2 3) ≤1 s ≤2 s ≤2 s
Availability ≥99.8% (2 years) ≥99.5% (2 years) ≥99.8% (30 days)
Continuity ≥99.97% (3 hours) ≥99.85% (3 hours) NA
Time-to-alarm ≤10 s ≤10 s As soon as practical byMSI
Augmentation 2 or more DGNSSstations
Single DGNSS station None
Notes:1) The paragraph in question reads ‘Taking into account the radio frequency environment,
the coverage of the system should be adequate to provide position-fixing throughout thisphase of navigation
2) Update rate of the computed and displayed position data3) Update rate if the computed position data is used for graphical display or for direct
control of the ship.
Table 4 IMO Performance Requirements according to proposed revision ofA.815(19)
4.5 IMO PERFORMANCE REQUIREMENTS ACCORDING TOA.915(22)
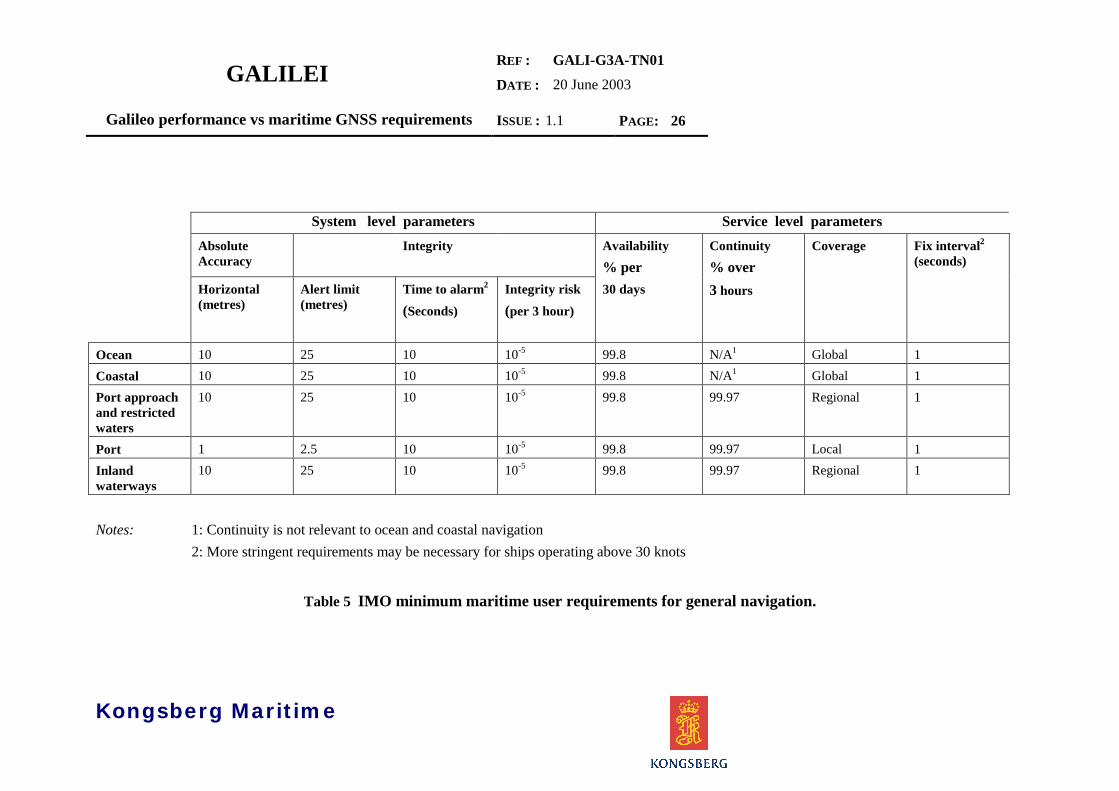
Appendices 2 and 3 of A.915(22) are reproduced in the Annex of this document. TheAppendices gives tables of minimum maritime user requirements for general navigation andpositioning respectively, and a total of 39 different maritime navigation and positioningapplications/requirements have been identified andThe requirements for general navigation is given in Table 5 below. It should be noted that theareas of navigation are defined differently from those given in the revised A.815(19). In

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 25
Kongsberg Maritime
addition to the application areas of A.815(19) it also has requirements for Port operations andInland Waterways.The A.915(22) also includes requirements for Alert limits and Integrity risk. The Alert Limitis specified to 2.5 times the horisontal accuracy (95%) and Integrity risk is 10-5 per 3 hours forall applications. Likewise, continuity is specified to 99.97% over 3 hours and availability isspecified to 99.8% averaged over 30 days for all applications were these parameters areapplicable. Time to alarm is 10s with one exception; cargo handling, where the requirementis set to 1s.With respect to horisontal positioning accuracy, approx. 50% of the applications (20 out of39) have a requirement for 10m (95%), approx. 40% (15) have a 1- 2 m (95%) requirement,while 4 applications (automatic docking, dredging, construction works and cargo handling)have requirements lower than, or equal to 0.1 m (95%).
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 26
Kongsberg Maritime
System level parameters Service level parametersAbsoluteAccuracy
Integrity Availability% per
Continuity% over
Coverage Fix interval2
(seconds)
Horizontal(metres)
Alert limit(metres)
Time to alarm2
(Seconds)Integrity risk(per 3 hour)
30 days 3 hours
Ocean 10 25 10 10-5 99.8 N/A1 Global 1Coastal 10 25 10 10-5 99.8 N/A1 Global 1Port approachand restrictedwaters
10 25 10 10-5 99.8 99.97 Regional 1
Port 1 2.5 10 10-5 99.8 99.97 Local 1Inlandwaterways
10 25 10 10-5 99.8 99.97 Regional 1
Notes: 1: Continuity is not relevant to ocean and coastal navigation2: More stringent requirements may be necessary for ships operating above 30 knots
Table 5 IMO minimum maritime user requirements for general navigation.
GALILEIREF :
DATE :
GALI-G3A-DD101-1.A10 July 2002
Maritime Standardisation Studies ISSUE : 1.A PAGE: 27
Kongsberg Seatex
5 GALILEO SERVICE PERFORMANCE EVALUATION
5.1 THE GALILEO NAVIGATION SERVICES
The tentative Galileo frequency and signal plan, [AD2], uses the same center frequencies as GPS on E5A(L5) and E2-L1-E1 (L1), which ensures a maximum interoperability with GPS and provides for the futureuse of a combined GPS and Galileo services. In addition, two other carriers (E5B, E6) are planned forsupporting commercial and public services.
The different carriers are separated into “signals” using complex modulation schemes as described in[AD2]. These signals will then comprise the ranging codes and navigation messages to be used for theOpen (OS), Commercial (CS), Safety-of-life (SoL) and Public Regulated (PRS) services as describedin [AD1 and 2].
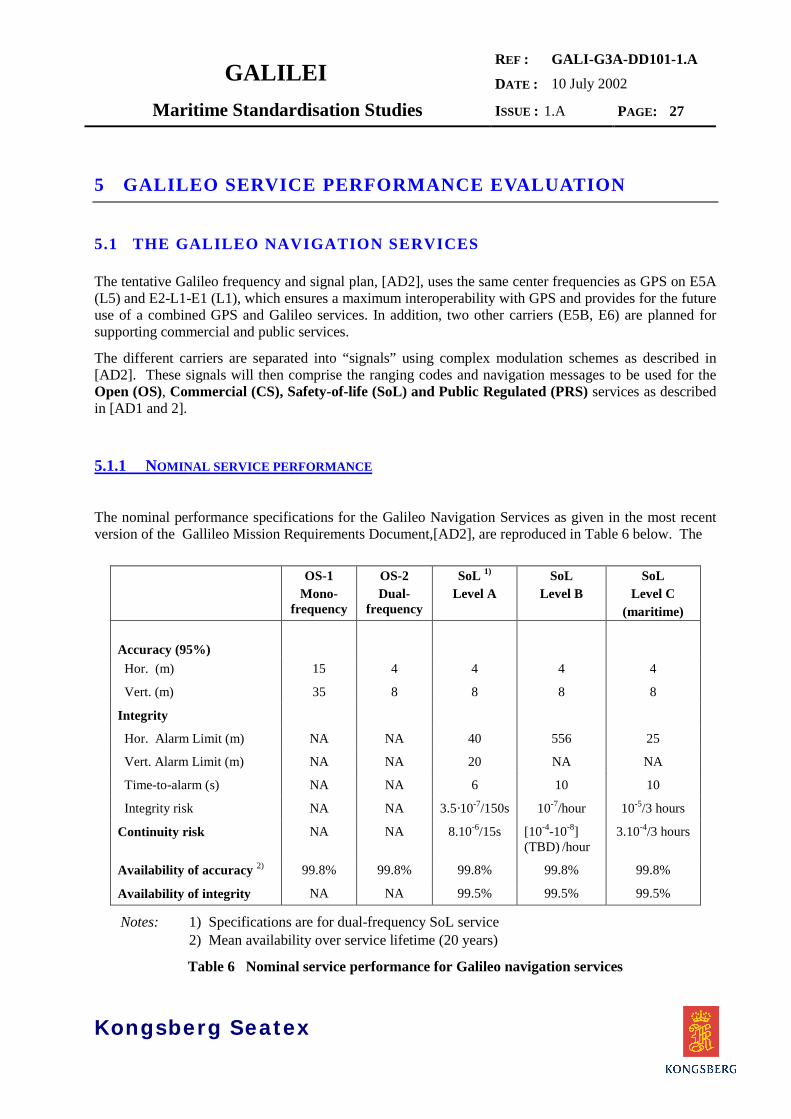
5.1.1 NOMINAL SERVICE PERFORMANCE
The nominal performance specifications for the Galileo Navigation Services as given in the most recentversion of the Gallileo Mission Requirements Document,[AD2], are reproduced in Table 6 below. The
OS-1Mono-
frequency
OS-2Dual-
frequency
SoL 1)
Level ASoL
Level BSoL
Level C(maritime)
Accuracy (95%) Hor. (m) 15 4 4 4 4
Vert. (m) 35 8 8 8 8
Integrity
Hor. Alarm Limit (m) NA NA 40 556 25
Vert. Alarm Limit (m) NA NA 20 NA NA
Time-to-alarm (s) NA NA 6 10 10
Integrity risk NA NA 3.5·10-7/150s 10-7/hour 10-5/3 hours
Continuity risk NA NA 8.10-6/15s [10-4-10-8](TBD) /hour
3.10-4/3 hours
Availability of accuracy 2) 99.8% 99.8% 99.8% 99.8% 99.8%
Availability of integrity NA NA 99.5% 99.5% 99.5%
Notes: 1) Specifications are for dual-frequency SoL service2) Mean availability over service lifetime (20 years)
Table 6 Nominal service performance for Galileo navigation services

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 28
Kongsberg Maritime
requirements given in Table 6 represents the last stage in a more or less continuous process, and previousversions of this technical note have been based on MRD V4.0 and V5.0.The performance specifications in the previous versions of the MRD were strongly influenced by thenavigation service requirements for civil aviation, and did not reflect the maritime (or any other)requirements as given in IMO Res. A. 815(19) and A.915(22). This has been pointed out in all previousversions of this technical note as well as in documents delivered within the SAGA project.The last MRD version therefore represents a “break-through” for the acceptance of service requirementsfor transport modes other than civil aviation, and for maritime applications (SoL-Level C) we would liketo think that the previous reports and comments to MRD undertaken within the scope of the Galilei -Task G3A has contributed to this result.The integrity levels A, B and C corresponds to the various transport application domains as follows,[AD2]:
• Level A shall cover operations, requiring horizontal and/or vertical guidance, with short exposuretime, and with very stringent dynamic conditions, for example, in the aviation domain approachoperations with vertical guidance (APV II). It also covers some rail and road applications.
• Level B shall cover aviation operations in the range from en-route to NPA (Non PrecisionApproach).
• Level C shall cover maritime operations including ocean navigation, costal navigation, portapproach, restricted waters and inland waterways.
5.1.2 THE GALILEO INTEGRITY CONCEPT
In order to be considered for safety critical and other safety related applications, it is essential that Galileoprovide an independent (from space and ground control segment) and robust integrity service. Integritydata will be available for CS, SoL and PRS, and will be based on an independent ‘Integrity Determinationand Dissemination’ ground component consisting of a network of monitoring stations (IMS), an integritycontrol centre (ICC) and integrity up-link stations (IULS). The Ground Integrity Channel (GIC) willprovide integrity information (warning alerts within time-to-alarm requirements) at a global level.However, the GIC also includes an opportunity for regions other than Europe to provide their ownintegrity service dedicated to Galileo integrity determination over their specific area if regions choose notto adopt Galileo’s global integrity.
5.2 GALILEO SERVICE PERFORMANCE VS IMO A. 815(19)
The aim of this chapter is to analyse the navigation service specifications of Galileo as defined in theMission Requirement Document [AD2] for the purpose of verifying that the specific maritimerequirements as stated in the revised IMO Res. A. 815(19) are met. The analysis is based on a simulationtool provided by GMV [RD3] which has been used throughout the GALA study.This preliminary analysis was undertaken using data for UERE and satellite reliability available from theformer GALA study. Also, the basis for the evaluation of compliance with IMO requirements was theMRD V5 (draft).
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 29
Kongsberg Maritime
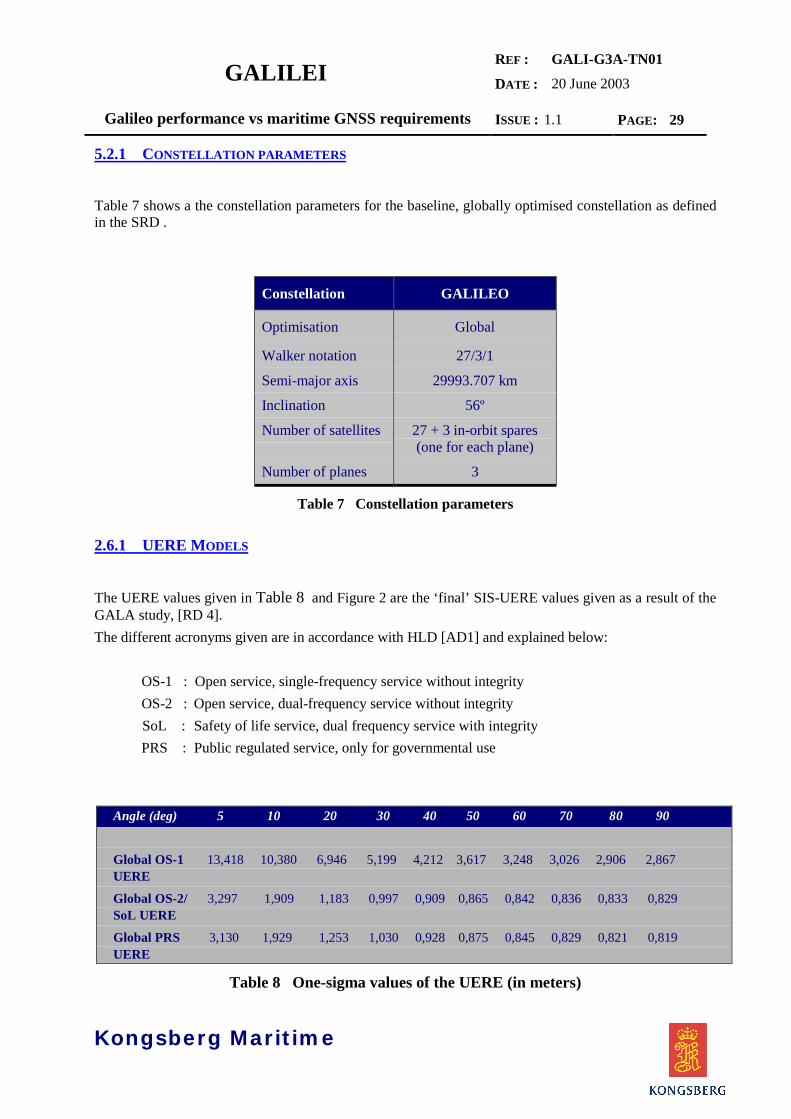
5.2.1 CONSTELLATION PARAMETERS
Table 7 shows a the constellation parameters for the baseline, globally optimised constellation as definedin the SRD .
Constellation GALILEO
Optimisation Global
Walker notation 27/3/1
Semi-major axis 29993.707 km
Inclination 56º
Number of satellites 27 + 3 in-orbit spares(one for each plane)
Number of planes 3
Table 7 Constellation parameters
2.6.1 UERE MODELS
The UERE values given in Table 8 and Figure 2 are the ‘final’ SIS-UERE values given as a result of theGALA study, [RD 4].The different acronyms given are in accordance with HLD [AD1] and explained below:
OS-1 : Open service, single-frequency service without integrityOS-2 : Open service, dual-frequency service without integritySoL : Safety of life service, dual frequency service with integrityPRS : Public regulated service, only for governmental use
Angle (deg) 5 10 20 30 40 50 60 70 80 90
Global OS-1 13,418 10,380 6,946 5,199 4,212 3,617 3,248 3,026 2,906 2,867UERE
Global OS-2/ 3,297 1,909 1,183 0,997 0,909 0,865 0,842 0,836 0,833 0,829SoL UERE
Global PRS 3,130 1,929 1,253 1,030 0,928 0,875 0,845 0,829 0,821 0,819UERE
Table 8 One-sigma values of the UERE (in meters)

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 30
Kongsberg Maritime
Figure 2 Graph of the one-sigma Global SIS-UERE values
5.2.2 GALILEO OPEN SERVICE (OS)
The following graphs show the estimated horisontal accuracy for the nominal OS single frequency (OS-1) and OS dual frequency (OS-2) services for a 10° mask angle at an availability level of 99.8.
Single-frequency receivers (OS-1)
Figure 3 Horisontal accuracy (95%) of the nominal constellation for a masking angle of 10º at anavailability of 99.8% and using the OS-1 (Single-frequency) UERE
0
2
4
6
8
10
12
14
0 10 20 30 40 50 60 70 80 90
Elevation, deg
1 si
gma
valu
e, m
Galileo - OSGalileo - CSGalileo - SASGalileo - PRS

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 31
Kongsberg Maritime
The positioning accuracy is the worst positioning accuracy calculated over time windows of 1 day of theconstellation lifecycle at each grid point. and at a measured availability level of 99.8% over a timewindow. Please note that the availability level is the availability of the position accuracy.
5.2.2.1 Integrity enhancement
From Figure 3 it can be concluded that the OS services will comply with the accuracy requirements forOcean Navigation (Table 4). However, since no integrity information will be available for this serviceon a SIS basis, some form of augmentation is needed in order to comply with the requirements fornavigation in coastal and harbour approach areas.
Integrity may be added either from an external local or regional source (GIC) or by using RAIM or CAIMalgorithms. The RAIM method does not require any additional equipment to be installed, and will be thepreferred method in most cases.
The RAIM technique uses an overdetermined navigation solution to perform a consistency check. RAIMrequires a minimum of five visible satellites in ordet to perform fault detection and a minimum of six forfault detection and isolation/exclusion of a faulty satellite.
A number of RAIM algorithms have been developed, however, only two seems to have found widespreaduse, i.e. the ‘snapshot’ algorithm developed in support of RTCA/DO - 208 and an algorithm developed byUKOOA [RD5]. Both methods estimates the smallest horisontal radial position that can be detected for aspecified false alarm and missed detection probability, termed the horisontal protection limit (HPL) in the‘snapshot’ algorithm and marginally detectable error (MDE) by UKOOA. If the HPL or MDE is below acertain limit, the horisontal alert or alarm limit, the RAIM is said to be available.
In order to improve the RAIM availability, an extra observable may be introduced into the system toincrease the redundancy of the solution. If good quality a priori height information is available, this mayreduce the number of satellites needed to perform RAIM. For maritime navigation this requires a goodgeoidal height model (for instance the STANAG 4294) in combination with tidal estimation ormeasurement and input of antenna height. Additional assumptions can also be made from the dynamicproperties of the vessel, i.e. the speed is not likely to change drastically in a few seconds for ships of morethan 100 gt. (If it does, there is probably little concern for navigational problems).
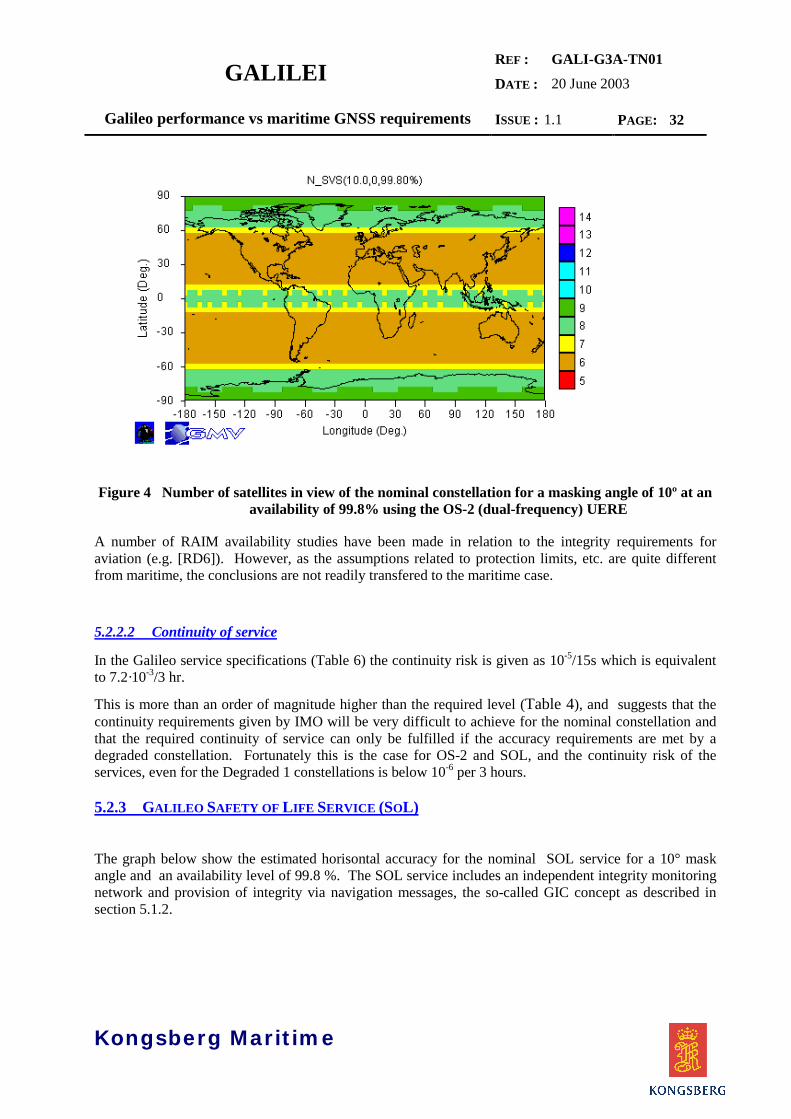
Figure 9 shows the minimum number of visible satellites for a masking angle of 10° for the nominalconstellation. As is shown, we will have at least six visible satellites at any time. This also means that atleast five satellites will be visible for the degraded 1 constellation as shown in Annex A.
From the above we can conclude that there is a good chance that RAIM may provide the requiredintegrity performance for the OS-2, however, a more detailed analysis of RAIM availability is neededbefore any final conclusions can be reached.
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 32
Kongsberg Maritime
Figure 4 Number of satellites in view of the nominal constellation for a masking angle of 10º at anavailability of 99.8% using the OS-2 (dual-frequency) UERE
A number of RAIM availability studies have been made in relation to the integrity requirements foraviation (e.g. [RD6]). However, as the assumptions related to protection limits, etc. are quite differentfrom maritime, the conclusions are not readily transfered to the maritime case.
5.2.2.2 Continuity of service
In the Galileo service specifications (Table 6) the continuity risk is given as 10-5/15s which is equivalentto 7.2·10-3/3 hr.
This is more than an order of magnitude higher than the required level (Table 4), and suggests that thecontinuity requirements given by IMO will be very difficult to achieve for the nominal constellation andthat the required continuity of service can only be fulfilled if the accuracy requirements are met by adegraded constellation. Fortunately this is the case for OS-2 and SOL, and the continuity risk of theservices, even for the Degraded 1 constellations is below 10-6 per 3 hours.
5.2.3 GALILEO SAFETY OF LIFE SERVICE (SOL)
The graph below show the estimated horisontal accuracy for the nominal SOL service for a 10° maskangle and an availability level of 99.8 %. The SOL service includes an independent integrity monitoringnetwork and provision of integrity via navigation messages, the so-called GIC concept as described insection 5.1.2.

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 33
Kongsberg Maritime
Figure 5 Horisontal accuracy (95%) of the nominal constellation for a masking angle of 10º at anavailability of 99.8% using the SOL UERE
However, it should be noted that RAIM and CAIM also have a capacity to handle ‘local effects’,including severe multipath, which is not captured by the IMS network. The RAIM or CAIM functionalityis therefore considered to be a very useful attribute of a GNSS receiver even if integrity is provided fromexternal sources.The SOL performance complies with IMO operational requirements for all phases of navigation and willmost likely be the preferred navigational service for the regulated maritime sector.
3.2.1 GALILEO HORISONTAL POSITIONING ACCURACY FOR DIFFERENT CONSTELLATIONSTATES
Table 9 summarises the findings w.r.t estimated horisontal accuracy for the nominal Galileo constellationand the degraded states resulting from the simulation study.
The estimated positioning accuracy is the worst positioning accuracy calculated over time windows of 1day of the constellation lifecycle for the geographical area indicated (global or Europe). The tables givethe estimated accuracy for 99.5% and 99.8% availability consistent
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 34
Kongsberg Maritime
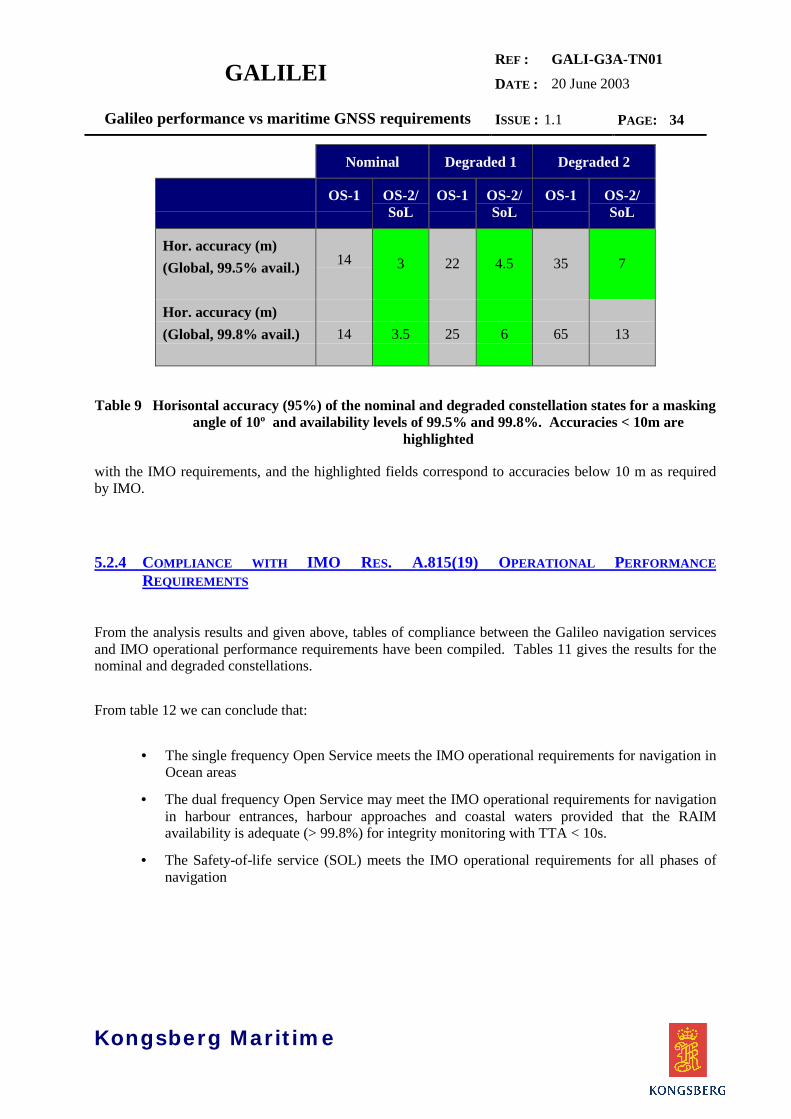
Nominal Degraded 1 Degraded 2
OS-1 OS-2/SoL
OS-1 OS-2/SoL
OS-1 OS-2/SoL
Hor. accuracy (m)(Global, 99.5% avail.) 14 3 22 4.5 35 7
Hor. accuracy (m)(Global, 99.8% avail.) 14 3.5 25 6 65 13
Table 9 Horisontal accuracy (95%) of the nominal and degraded constellation states for a maskingangle of 10º and availability levels of 99.5% and 99.8%. Accuracies < 10m are
highlighted
with the IMO requirements, and the highlighted fields correspond to accuracies below 10 m as requiredby IMO.
5.2.4 COMPLIANCE WITH IMO RES. A.815(19) OPERATIONAL PERFORMANCEREQUIREMENTS
From the analysis results and given above, tables of compliance between the Galileo navigation servicesand IMO operational performance requirements have been compiled. Tables 11 gives the results for thenominal and degraded constellations.
From table 12 we can conclude that:
• The single frequency Open Service meets the IMO operational requirements for navigation inOcean areas
• The dual frequency Open Service may meet the IMO operational requirements for navigationin harbour entrances, harbour approaches and coastal waters provided that the RAIMavailability is adequate (> 99.8%) for integrity monitoring with TTA < 10s.
• The Safety-of-life service (SOL) meets the IMO operational requirements for all phases ofnavigation

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 35
Kongsberg Maritime
Nominal Degraded 1 Degraded 2
Navigation phase OS-1 OS-2 SOL OS-1 OS-2 SOL OS-1 OS-2 SOL
Ocean C C C C C C C C C
Coastal/harbour,low traffic/risk
NC NC1 C NC NC2 C NC NC2 C
Coastal/harbour,high traffic/risk
NC NC1 C NC NC2 C NC NC NC
C: CompliantNC: Not compliantNotes: 1) May be compliant using RAIM (6 satellites or more in view), needs further evaluation 2) May be compliant using RAIM + Height – aiding (5 satellites or more in view)
Table 10 Table of compliance between Galileo navigation services using the Galileo constellationand IMO operational performance requirements as given in IMO Res. A.815(19).
5.3 GALILEO SERVICE PERFORMANCE VS IMO A. 915(22)
A second evaluation of Galileo service performance was undertaken in Feb 2003 and reported in the draftversion of this document.As explained in chapter 4.5 the A.915(22) also includes requirements for Alert limits and Integrity risk.The Alert Limit is specified to 2.5 times the horisontal accuracy (95%) and Integrity risk is 10-5 per 3hours for all applications.The aim of this evaluation was to analyse the navigation service specifications of the Galileo SoLservices as defined in the HLD Issue 3, [AD1], and MRD V5 (draft) for the purpose of verifying thatthe specific maritime requirements as stated in the revised IMO Res. A. 915(22) are met.The analysis is based on a simulation tool provided by GMV [RD3] which has been used throughout theGALA study.This analysis was undertaken using new data for UERE based on the results of a recent study undertakenwithin the Galilei Task E project [RD7], and constellation state data provided by GISS, [RD8]. Forreference, the SoL performance specification as given in HLD Issue 3 is given in Table 11.

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 36
Kongsberg Maritime
Safety-Of-Life Service
Carriers Three Frequencies1
ComputesIntegrity
YesType ofReceiver
Ionosphericcorrection
Based on dual-frequency measurements
Coverage Global
Critical level Non-Critical level
Accuracy (95%) H: 4 m
V: 8 m
H: 220 m
Alarm Limit H: 12 V 20 m H: 556 m
Time-To-Alarm 6 seconds2 10 seconds
Integrity
Integrity risk 3.5x10-7 / 150 s 10-7/hour
Continuity Risk 10-5/15 s 10-4/hour - 10-8/hour
Availability of integrity 99.5% 99.5%
Availability of accuracy 99.8 % 99.8%
Certification/Liability Yes Yes
Table 11 Service performances for the Galileo Safety of Life Services (HLD Issue 3)
When comparing the maritime GNSS requirements given in Table 5 with the SoL specifications givenabove, there are some significant differences in the requirements.
5.3.1 CRITICAL VS NON-CRITICAL OPERATION
According to the HLD, the non-critical level is adequate for en-route and initial approach operations foraviation as well as the oceanic and coastal phase for maritime navigation. This may be true with respectto integrity, continuity and availability, however, the accuracy specification, including HAL, does notcomply with maritime requirements for general navigation.The three basic navigation phases; ocean, coastal and port apprach operations all have critical elementsrelating to passing and overtaking other vessels, etc. and should be considered as critical in the sense thatintegrity and continuity risks should be specified over a typical critical operation period (3 hours).
1 The SoL Service signals are in the E5a+E5b and L1 bands, but the level of performances
indicated in the table can be achieved by using only L1 and E5b frequencies. Theperformances of the service based on E5a+E5b and L1 frequencies are under assessment.
2 The actual value is TBC pending the results of the feasibility phase.
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 37
Kongsberg Maritime
5.3.2 ACCURACY, INTEGRITY AND CONTINUITY
All the parameters given for accuracy and integrity; confidence levels, alert limits, integrity risk andcritical operation period are interdependent. One cannot single out individual parameters for comparison.A true comparison can only be made based on extensive simulations using the same hypothesis regardingthe constellation, including failure statistics.
5.3.3 AVAILABILITY
According to the MRD, the availability requirements is given as a mean availability over the constellationlifetime, using estimates of the probability for the constellation being in different states (nominal or1,2,3,, failed satellites).The maritime requirement is based on averaging over 30 days, which correspond to the longest voyagenormally experienced by merchant ships. In order to evaluate the maritime availability requirement, it isnecessary to consider worst case scenarios for the actual service parameter.
5.3.4 EVALUATION PARAMETERS
The aim of this chapter is to analyse the navigation service specifications of Galileo as defined in theMission Requirement Document [AD2] and the System Requirement Document [AD3] for the purpose ofverifying that the specific maritime requirements as stated by IMO can be met. The analysis is based on asimulation tool provided by GMV [RD 3] which has been used throughout the GALA study.
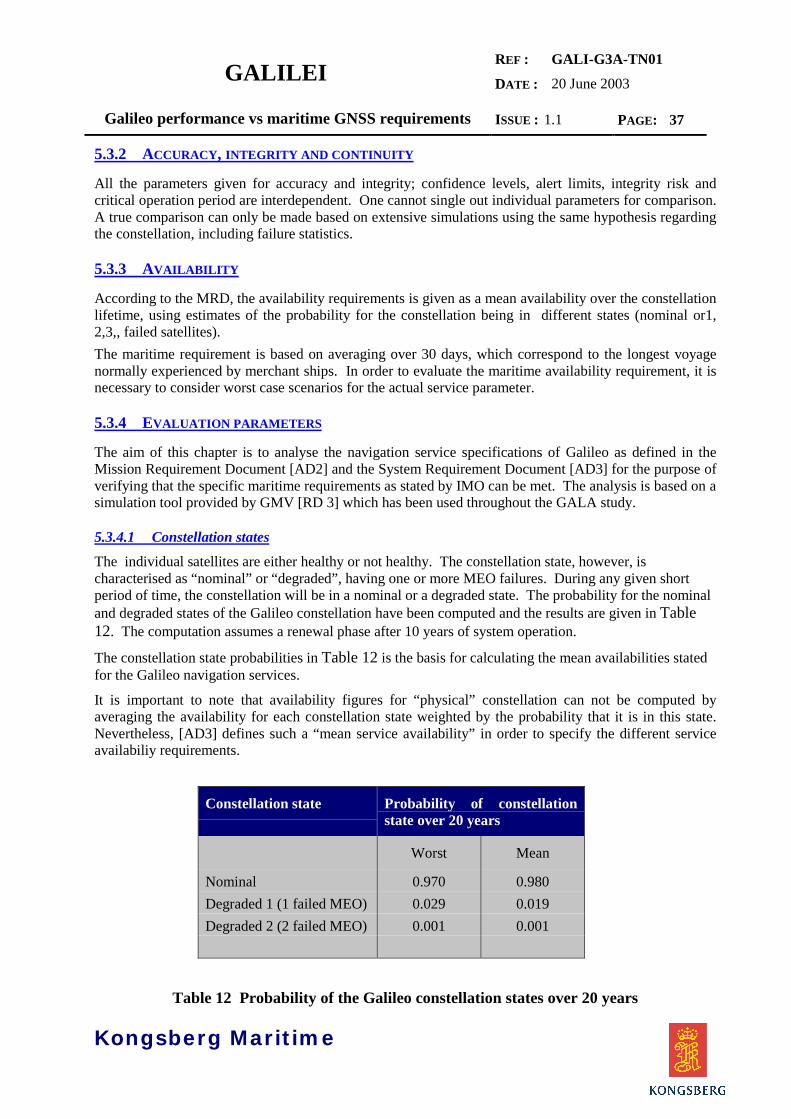
5.3.4.1 Constellation statesThe individual satellites are either healthy or not healthy. The constellation state, however, ischaracterised as “nominal” or “degraded”, having one or more MEO failures. During any given shortperiod of time, the constellation will be in a nominal or a degraded state. The probability for the nominaland degraded states of the Galileo constellation have been computed and the results are given in Table12. The computation assumes a renewal phase after 10 years of system operation.
The constellation state probabilities in Table 12 is the basis for calculating the mean availabilities statedfor the Galileo navigation services.
It is important to note that availability figures for “physical” constellation can not be computed byaveraging the availability for each constellation state weighted by the probability that it is in this state.Nevertheless, [AD3] defines such a “mean service availability” in order to specify the different serviceavailabiliy requirements.
Constellation state Probability of constellationstate over 20 years
Worst Mean
Nominal 0.970 0.980Degraded 1 (1 failed MEO) 0.029 0.019Degraded 2 (2 failed MEO) 0.001 0.001
Table 12 Probability of the Galileo constellation states over 20 years
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 38
Kongsberg Maritime
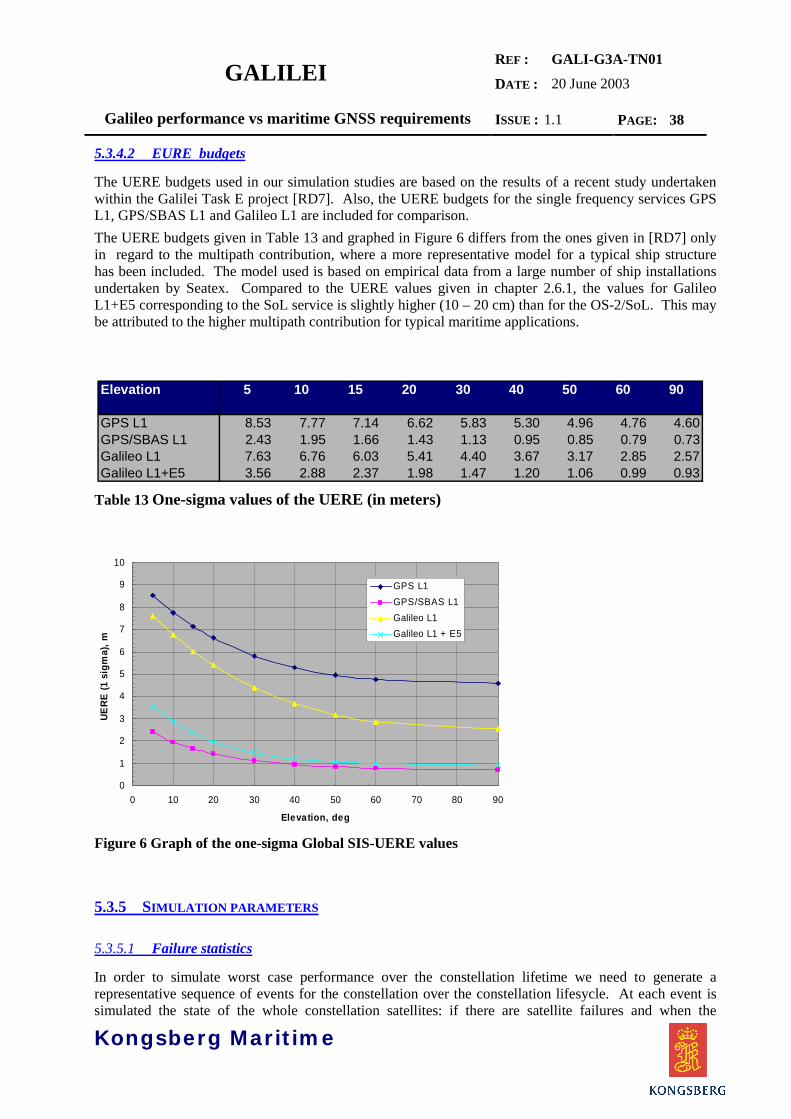
5.3.4.2 EURE budgets
The UERE budgets used in our simulation studies are based on the results of a recent study undertakenwithin the Galilei Task E project [RD7]. Also, the UERE budgets for the single frequency services GPSL1, GPS/SBAS L1 and Galileo L1 are included for comparison.The UERE budgets given in Table 13 and graphed in Figure 6 differs from the ones given in [RD7] onlyin regard to the multipath contribution, where a more representative model for a typical ship structurehas been included. The model used is based on empirical data from a large number of ship installationsundertaken by Seatex. Compared to the UERE values given in chapter 2.6.1, the values for GalileoL1+E5 corresponding to the SoL service is slightly higher (10 – 20 cm) than for the OS-2/SoL. This maybe attributed to the higher multipath contribution for typical maritime applications.
Table 13 One-sigma values of the UERE (in meters)
Figure 6 Graph of the one-sigma Global SIS-UERE values
5.3.5 SIMULATION PARAMETERS
5.3.5.1 Failure statistics
In order to simulate worst case performance over the constellation lifetime we need to generate arepresentative sequence of events for the constellation over the constellation lifesycle. At each event issimulated the state of the whole constellation satellites: if there are satellite failures and when the
Elevation 5 10 15 20 30 40 50 60 90
GPS L1 8.53 7.77 7.14 6.62 5.83 5.30 4.96 4.76 4.60GPS/SBAS L1 2.43 1.95 1.66 1.43 1.13 0.95 0.85 0.79 0.73Galileo L1 7.63 6.76 6.03 5.41 4.40 3.67 3.17 2.85 2.57Galileo L1+E5 3.56 2.88 2.37 1.98 1.47 1.20 1.06 0.99 0.93
0
1
2
3
4
5
6
7
8
9
10
0 10 20 30 40 50 60 70 80 90
Elevation, deg
UERE
(1 s
igm
a), m
GPS L1GPS/SBAS L1Galileo L1Galileo L1 + E5

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 39
satellites start to fail and when restored to normal operation. This information is needed when theperformances are required at an availability level measured over a period of time .For this we need to estimate a set of reliability parameters which comply with the constellation stateprobabilities given in Table 12. It should be noted that the set of reliability parameters given in Table 14only represents one of a number of possible combination which produces the required constellation stateprobabilities.
Galileo
SHORT FAILURES:
MTTR 12 hours MTBF 30 months
LONG FAILURES:
MTTR 5 months Reliability 0.85 over 10 years
MAINTENANCE: none
Time to replace a failedsatellite using an in-orbitspare
7 days
Table 14 Satellite reliability parameters for the Galileo constellation used in simulations
The reliability parameters in Table 14 produces the failure statistics given below. The
Statistic 1: Means probabilities of the constellation to have satellite failuresNo. of satellite failures Probability Cumulative Probability
0 9.7296552e-001 0.97296551 2.6445427e-002 0.99941092 5.8442861e-004 0.99999543 4.6279156e-006 1
Statistic 2: Means probabilities of the constellation to change the number of satellitefailures when the time of operation is: 180.00 minutesJump to one failure more Probability
0 - 1 0.0037982331 - 2 8.651631e-0052 - 3 2.313958e-006
Kongsberg Maritime
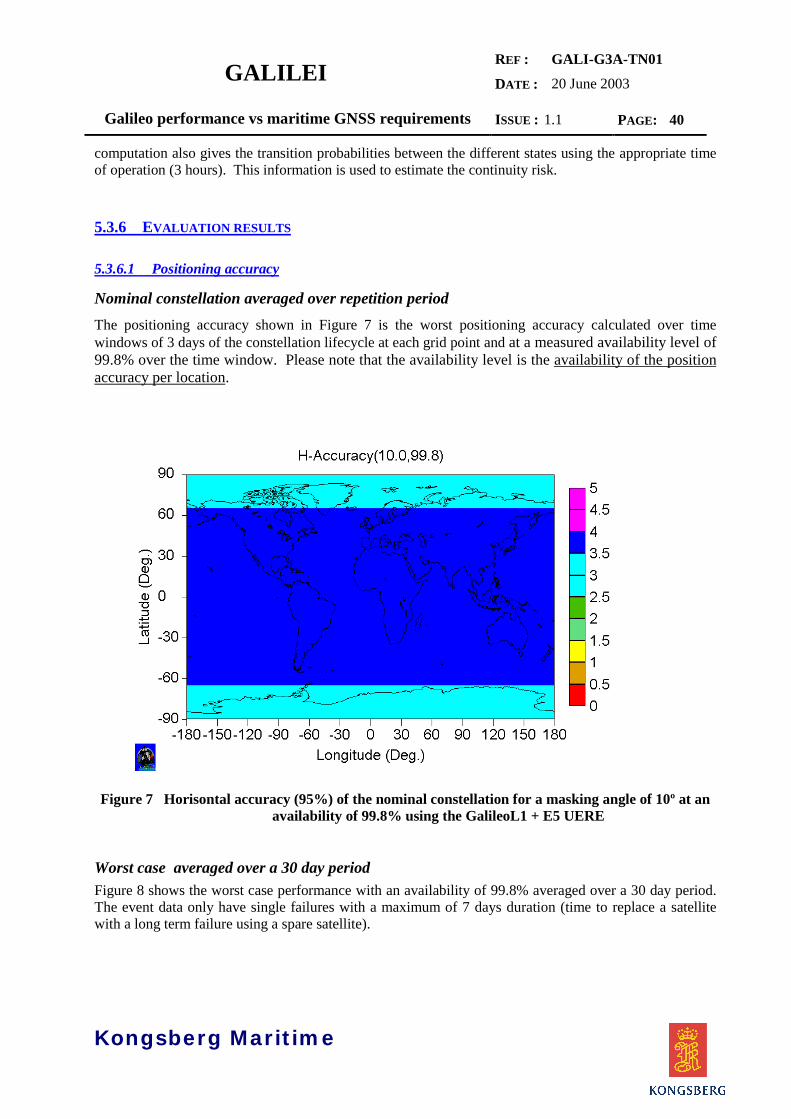
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 40
Kongsberg Maritime
computation also gives the transition probabilities between the different states using the appropriate timeof operation (3 hours). This information is used to estimate the continuity risk.
5.3.6 EVALUATION RESULTS
5.3.6.1 Positioning accuracy
Nominal constellation averaged over repetition periodThe positioning accuracy shown in Figure 7 is the worst positioning accuracy calculated over timewindows of 3 days of the constellation lifecycle at each grid point and at a measured availability level of99.8% over the time window. Please note that the availability level is the availability of the positionaccuracy per location.
Figure 7 Horisontal accuracy (95%) of the nominal constellation for a masking angle of 10º at anavailability of 99.8% using the GalileoL1 + E5 UERE
Worst case averaged over a 30 day periodFigure 8 shows the worst case performance with an availability of 99.8% averaged over a 30 day period.The event data only have single failures with a maximum of 7 days duration (time to replace a satellitewith a long term failure using a spare satellite).

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 41
Kongsberg Maritime
Figure 8 Worst case Horisontal accuracy (95%) for a masking angle of 10º at an availability of99.8% using the Galileo L1+E5 UERE
Having a single satellite failure reduces the maximum horisontal accuracy to approx. 8 m, however, stillwithin the 10 m requirement for general maritime navigation.
Figure 9 Worst case Minimum Number of satellites in view for a masking angle of 10º at anavailability of 99.8% using the Galileo L1+E5 UERE

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 42
Kongsberg Maritime
Figure 9 shows that the minimum number of satellites is 5, i.e. only single satellite failures.
5.3.6.2 Continuity of accuracy
Figure 10 Continuity risk for a critical operation period of 3 hours for a horisontal accuracybetter than 4 m
Figure 11 Continuity risk for a critical operation period of 3 hours for a horisontal accuracybetter than 10 m

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 43
Kongsberg Maritime
Figure 10 gives the continuity risk associated with the accuracies given in Figure 7 for an operationalperiod of 3 hours. As can be seen, even for accuracies better than 4 m, the IMO continuity requirementcan be met. More interesting is the result given in Figure 11, which shows the continuity risk (over 3hours) associated with a 10 m accuracy is lower than 5.10-7, almost 3 decades lower than therequirements.
5.3.6.3 Integrity
A detailed estimation of performance of the Galileo Integrity Channel is outside the scope of this study.However, the Galilei Task E study, [RD7], indicates that protection levels calculated using the GIC isapprox. half the values calculated using RAIM FD for a SoL receiver.Our conclusions below are based on a simple RAIM FD algorithm using design parameters adequate forthe maritime requirements.
Weighted RAIM FD calculationsThe basic design parameters; Probability of false alarm (Pfa) and Probability of missed detection (Pmd)are determined as follows:
Pfa is associated with the continuity risk, and is directly linked to the false alarm rate (far) through therelation:
Far = (far) x Tcor
where Tcor is the correlation time of the measurements. Tcorr is a property of the receiver, depending onthe smoothing algorithm employed. The (far) corresponding to the continuity risk is
Figure 12 Availability of the Horisontal Protection Level using the weighted RAIM FD algorithmfor a masking angle of 10º using the Galileo L1+E5 UERE.
HPL FD Availability, Galileo L1+E5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 5 10 15 20 25
HPL FD, m
Avai
labi
lity
Pfa = 10-7Pfa = 10-5
Pmd =10-2

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 44
Kongsberg Maritime
10 –4/hour, and to be on the safe side Pfa is set to 10 –7, corresponding to Tcor of 3.6 s.
Pmd is set according to the required integrity risk of 10–5/3 hours using a rate of misleading informationof 10 –4/hour which corresponds to approx. 1 event per year. This gives a Pmd of approx. 10 –2.Figure 12 shows the worst availability of the horisontal protection levels over the repetition period of theconstellation. The 99.8% level is approx. 21 m for Pfa equal to 10 –7 , and consequently the availabilityfor HAL equal to 25 m is close to 100%. The availability for Pfa equal to 10 –5 is shown for comparison.The area between these two graphs should cover most maritime applications.
5.3.7 GALILEO SOL SERVICE COMPLIANCE WITH IMO RES. A.915(22)
The evaluation results given above indicates that the Galileo SoL service complies with most futureGNSS requirements stated in the the revised IMO Resolution A.915(22) on Maritime Policy for a futureGlobal Navigation Satellite System (GNSS) for general navigation. With reference to Table 5 this appliesto ocean, coastal, port approach and restricted waters and inland waterways.Port navigation requires a 1 m (95%) accuracy and will require local augmentation of the SoL service.
With reference to Table 11 we therefore proposed a new set of performance specifications for the SoLservice as shown in Table 15 below, including a critical level specification for maritime.When compared to the new SoL requirements presented in the last issue of the Galileo MRD andreproduced in Table 6, a number of the proposed requirements have been taken into account. The onlynon-compliant specification seems to be the availability of integrity which is given as 99.5% whereas theIMO requirement is 99.8%.

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 45
Kongsberg Maritime
Safety-Of-Life ServiceCarriers Three Frequencies3
ComputesIntegrity
YesType ofReceiver
Ionosphericcorrection
Based on dual-frequency measurements
Coverage GlobalCritical level Aviation Critical level Maritime
Accuracy (95%) H: 4 m
V: 8 mH: 10 m
Alarm Limit H: 12 V 20 m H: 25 m
Time-To-Alarm
6 seconds4 10 seconds
Integrity
Integrity risk 3.5x10-7 / 150 s 10-5/ 3 hours
Continuity Risk 10-5/15 s 3.0 x 10-4/ 3 hours
Availability of integrity 99.5% 99.8% 5
Availability of accuracy 99.8 % 99.8% calculated over a30 day period
Certification/Liability Yes Yes
Table 15 Proposed service performances for the Galileo SoL service
3 The SoL Service signals are in the E5a+E5b and L1 bands, but the level of performances
indicated in the table can be achieved by using only L1 and E5b frequencies. The
performances of the service based on E5a+E5b and L1 frequencies are under assessment.4 The actual value is TBC pending the results of the feasibility phase.5 A preliminary assessment of RAIM availability indicates that RAIM FD based on the weighted
RAIM FD algorithm will be available globally 100% of the time.

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 46
Kongsberg Maritime
6 STANDARDISATION ISSUES
6.1 MARITIME STANDARDISATION
A comprehensive survey of the maritime standardisation process is given in [RD9], and only a few’highlights’ are presented in the following.
At the core of all standardisation and regulation activities within the maritime field is IMO, TheInternational Maritime Organisation. The standardisation work per se is carried out in the MaritimeSafety Committee (MSC) and its Sub-committees (NAV, COMSAR, etc.). The MSC is the highesttechnical body of IMO, and has the responsibility for considering and submitting recommendations andguidelines on safety for possible adoption by the Assembly.
Only delegates from Member States are represented in the main IMO fora; Assembly, Council, MSC andthe Sub-committees. However, a number of Intergovernmental organisations have concluded co-operative agreements with IMO and have been granted an observer status at MSC and Sub-committeemeetings. Also, a number of non-governmental organisations have been granted a consultative status andthe right to be represented at committee meetings.
Figure 13 Standardisation bodies involved at the international level
The key standardisation bodies involved, other than IMO, are :
IEC/TC80
IALA/AISM
IHO
CIRM
EC
ITU-R
IMCA
ISO/TC8
Member States
NationalAuthorities
Co-op. Agreement
Consultative status
Independent
IACS
RTCMUSCG NMEA
IMO
Assembly
Council
MSCNAV
ESA
IMSO
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 47
Kongsberg Maritime
ITU-R and WRC regulates allocation and protection of maritime radio bands and GNSS frequencies aswell as recommendations on their use.
IEC TC80 develops test standards based on IMO performance standards for maritime equipment, notablyGNSS receivers, required on board SOLAS ships.
ISO TC 8 also develops test standards based on IMO performance standards. For historical reasons, teststandards for ship’s heading sensors (magnetic and gyro compass) has been the responsibility of ISO.
IALA/AISM administers the allocation of frequencies and ID numbers for DGNSS stations utilising theMaritime Radio Beacons (MB). In general, all terrestrial and buoy-based aids-to-navigation is theresponsibility of IALA/AISM. The organisation issues Manuls, Guides, Guidelines andRecommendations on the use of aids-to-navigations tools, notably VTS and AIS. The RadionavigationCommittee (RNAV) serves as ’expert body’ on GNSS to IMO.
RTCM is an independent US organisation. The RTCM-SC 104 standard for Differential GNSS is a de-facto standard for transmission of differential corrections to GPS and GLONASS, and is adopted by IEC.
NMEA is also an independent US organisation. The NMEA 0183 and NMEA 2000 are de-factostandards for interfacing marine electronic devices, and also adopted by IEC.
6.2 GNSS RECEIVERS
6.2.1 RECOGNITION OF NEW COMPONENTS TO THE WWRNS
For the immediate future, an extention of the WWRNS to encompass the DGNSS services from MaritimeRadio Beacons is anticipated. The system is already widely in use and is implemented in 45 countriesand proposed in 10 more around the world. World-wide there are close to 400 transmitting stationsplanned or in operation (as of November 2002), and Europe have 162 stations in 13 countries. It iscurrently also being expanded to provide coverage for all land areas of the U.S not currently covered bythe US Coast Guard maritime service (Nationwide Differential GPS).
Despite the recent termination of SA, continued use is expected due the provision of integrityinformation, the large number of users, low cost of user equipment and the strong long term commitmentsto this system by governmental institutions all over Europe and in the rest of the world. US govermenthas also committed to operate the USCG differential GPS service until at least 2015.
The main obstacle to IMO recognition is that IMO requires a signal availability of 99.8 % for areas withhigh traffic/risk. As no Administration is able to control atmospheric conditions in the coverage area,they hesitate to issue performance guarantees other than for broadcast availability. As a result, noAdministrations offering DGNSS services guaranties full compliance with the IMO signal availabilityrequirements.
WAAS/EGNOS and MSOL have been identified as potential candidates to the WWRNS, however, noactions have been taken sofar within IMO to support the candidacy. In high latitude areas it would bedifficult to achieve adequate signal availability due to shadowing, and a redistribution of correctionsignals using terrestrial communication would be required. One possibility which is currently beingdiscussed is to use the MBs for redistribution of WAAS/EGNOS signals in northern areas

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 48
Kongsberg Maritime
6.2.2 RECEIVER CERTIFICATION
All equipment which is required under the carriage requirement regulations of the revised SOLAS,Chapter V is subject to certification. Therefore, all GNSS receiving equipment carried onboard ships infulfilment of the carriage requirements must have a type approval certificate or other conformancecertificate issued by a designated test laboratory.
Figure 14 Receiver certification according to MED
In Europe this requirement is regulated through the ’Maritime Equipment Directive (MED)’, [RD10]through its latest amendment, [RD11].
The necessary provision for equipment type approval is:
� A performance standard adopted by IMO, and� A test standard based on the IMO performance standard, normally issued by IEC
The test standard specifies the methods of testing and the required test results.
Before a type approval certicicate can be issued (the Wheelmark), the product and the production processhas to conform to the applicable Environmental Standards as well as Quality Assurance standards. TheWheelmark is the maritime equivalent of the CE mark, and should be found on all equipment on boardEuropean ships.
ConformityAssessment bynotified body
IMO ReceiverPerformance
Standard
IEC ReceiverTest Standard
IEC 60945Environmentaltest standard
Product QualityAssurance ENISO 9002/9003
TypeApprovalCertificate
IMO Code onAlarms andIndicators
NMEA 0183Interfacestandard
RTCM SC104DGNSSstandard

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 49
Kongsberg Maritime
6.2.3 EXISTING RECEIVER STANDARDS
A survey of the key standards for GNSS receivers (IMO, ITU, IEC, RTCM, NMEA) can be found in[RD9]. At present, a complete set of standards exists for the certification of GPS SPS and GLONASSreceivers, combinations of GPS/GLONASS receivers as well as DGNSS receivers utilising maritimeradiobeacons.
In particular, it is not anticipated that any amendments to the IEC Environmental test standard formaritime equipment will be needed for Galileo.
6.3 MARITIME GALILEO RECEIVER STANDARDISATION
6.3.1 IMO STANDARDISATION PROCESS
The IMO Res. A.915(22) on maritime requirements for a future GNSS identifies Galileo as a potentialcandidate to the WWRNS. From the initiative of EC and others, the NAV Sub-Committee has beeninstructed by MSC 76 to include WWRNS on their work programme for the next meeting (NAV 49),with the following sub-items:
• Item H.1.1: New developments in the field of GNSS, especially Galileo
• Item H.1.2: Review and amendment of IMO policy for GNSS (Res. A. 915(22))
• Item H.1.3: Recognition of radionavigation systems as components of WWRNS (Res.A.815(19))
These new agenda points paves the way for a comprehensive deliberation of Galileo mission and systemrequirements with the view to obtain IMO recognition of Galileo as a component of the WWRNS.
With the goal to have certified Galileo receivers available for maritime use in the early operational phase,we have estimated a typical scenario for the overall standardisation process (Figure 15).
As indicated, the first step will be to draft and propose IMO performance standards for receivers adaptedto the various navigation services of Galileo, especially the SoL service.
6.3.2 AMENDMENT OF INTERFACE STANDARDS
The two applicable interface standards, NMEA 0183 and RTCM SC-104 need a few amendments in orderto accomodate the Galileo satellites;
NMEA 0183; only a few minor amendments seem to be needed. A new talker ID (GA?) to identifyGalileo receivers as well as a new set of satellite ID numbers must be defined. Also, new sentence(s) fortransfer of SAR/Galileo feedback messages must be defined.
RTCM SC-104; future versions of the data format would need to include new messages for Galileo,notably the Local Open and SoL services. Also, the locally assisted commercial, TCAR and PRSservices may be adapted to the RTCM signal formats. However, one should bear in mind that theDGNSS service offered by Maritime Radiobeacons (MB) will not be able to sustain the required TTA of1 s or less as specified for the Local SoL and commercial services. Also, the capasity of the MB DGNSSservice (100-200 bps) is not adequate for RTK and TCAR services.

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 50
Kongsberg Maritime
Phase / Milestone 2000 2001 2002 2003 2004 2005 2006 2007 2008
GALILEO:DefinitionDesign & DevelopmentDeploymentSystem ValidationMission ValidationGalileo Early OperationsGalileo Full OperationsMaritime receiverstandards development: SAGA draft standards Standards validation IMO perf. standard IMO perf. std. adoption RTCM DGNSS Std. NMEA IF Std. IEC test standards MED update Designation of test labs Certification
Figure 15 Receiver certification – typical scenario
6.3.3 NEW IEC TEST STANDARDS
A critical element in the standardisation process is the development of a new test standard. IEC TC 80has a historical tradition to develop new GNSS receiver test standards based on the IMO performancerequirements. It is anticipated that this tradition will be followed even for Galileo receivers. However,prior to such development, all interface standards must be adopted.
NAV49
NAV50 NAV51
MSC80
RTCM05 RTCM06
NMEA05 NMEA05

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 51
Kongsberg Maritime
7 CONCLUSIONS
The two IMO resolutions; A.815(19) and A.915(22), forms the backbone of IMO’s present and futurerequirements for Maritime Radionavigation Systems. Res. A.815(19) gives the formal requirements andprocedures for accepting new systems as ‘components of the World-Wide Radionavigation System(WWRNS)’, while Res. A.915(22) is a ‘positioning’ document related to IMO requirements for futuredevelopments of GNSS to be considered within the framework of A.815(19), as amended.The present report includes evaluations and analyses of the proposed Galileo navigation services withrespect to the IMO requirements, and with respect to the present revised IMO Res. A.815(19) we canconclude that:
• The single frequency Open Service meets the IMO operational requirements for navigation inOcean areas
• The dual frequency Open Service may meet the IMO operational requirements for navigationin harbour entrances, harbour approaches and coastal waters provided that the RAIMavailability is adequate (> 99.8%) for integrity monitoring with TTA < 10s.
• The Safety-of-life service (SoL) meets the IMO operational requirements for all phases ofnavigation
While the Res. A.815(19) only requires that ‘a warning of system non-availability or discontinuity shouldbe provided to users within 10 s’ , the Res. A.915(22) has more specific integrity requirements, includingintegrity risk and horisontal alert limit.With respect to the future requirements as stated in the Res. A.915(22), our preliminary conslusion is thatthe Galileo SoL service will meet most of the IMO requirements. With reference the latest version of theGalileo MRD (V5.1.1), the only non-compliance seems to be the availability of integrity which is givenas 99.5% whereas the IMO requirement is 99.8%.
A typical scenario for maritime receiver standardisation and certification indicates that there is a goodchanse of building the necessary framework for certification of Galileo receivers within the time frame ofthe Galileo development.

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 52
Kongsberg Maritime
ANNEX : IMO RES. A.915 (22) REVISED MARITIME POLICYAND REQUIREMENTS FOR A FUTURE GLOBALNAVIGATION SATELLITE SYSTEM (GNSS) –APPENDIX 2 AND 3


GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 54
Kongsberg Maritime
Appendix 2
Table of the minimum maritime user requirements for general navigation
System level parameters Service level parametersAbsoluteAccuracy
Integrity Availability% per
Continuity% over
Coverage Fix interval2
(seconds)
Horizontal(metres)
Alert limit(metres)
Time to alarm2
(Seconds)Integrity risk(per 3 hour)
30 days 3 hours
Ocean 10 25 10 10-5 99.8 N/A1 Global 1Coastal 10 25 10 10-5 99.8 N/A1 Global 1Port approachand restrictedwaters
10 25 10 10-5 99.8 99.97 Regional 1
Port 1 2.5 10 10-5 99.8 99.97 Local 1Inlandwaterways
10 25 10 10-5 99.8 99.97 Regional 1
Notes: 1: Continuity is not relevant to ocean and coastal navigation2: More stringent requirements may be necessary for ships operating above 30 knots

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 55
Kongsberg Maritime
Appendix 3
System level parameters Service level parametersA c c u r a c y Integrity Availability Continuity Coverage Fix interval2
Horizontal(metres)
Vertical1
(metres)Alert limit(metres)
Time toalarm2
(Seconds)
Integrity risk(per 3 hour)
% per30days
% over3hours
(seconds)
Operations Relative accuracy• tugs and pushers 1 2.5 10 10-5 99.8 99.97 Local 1• • • • icebreakers 1 2.5 10 10-5 99.8 99.97 Local 1• automatic collision avoidance
10 25 10 10-5 99.8 99.97 Global 1
Absolute accuracy• track control 10 N/A 25 10 10-5 99.8 99.97 Global 1• automatic docking 0.1 0.25 10 10-5 99.8 99.97 Local 1Traffic management3 Absolute accuracy• ship-to-ship coordination
10 25 10 10-5 99.8 99.97 Global 1
• ship-to-shore coordination
10 25 10 10-5 99.8 99.97 Regional 1
• shore-to-ship traffic management
10 25 10 10-5 99.8 99.97 Regional 1
Notes: 1: There may be a requirement for accuracy in the vertical plane for some port and restricted water operations2: More stringent requirements may be necessary for ships operating above 30 knots3: Traffic management applications in some areas, e.g. the Baltic, may require higher accuracy.
Table 1: Manoeuvring and traffic management applications
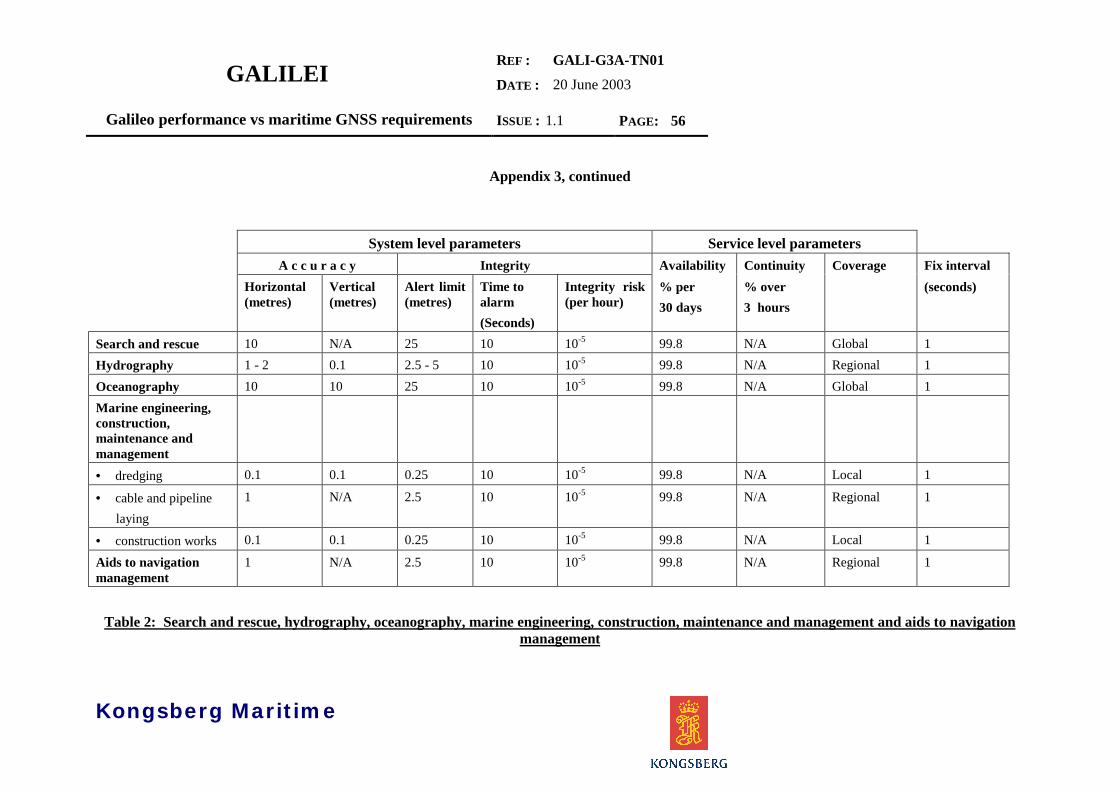
GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 56
Kongsberg Maritime
Appendix 3, continued
System level parameters Service level parametersA c c u r a c y Integrity Availability Continuity Coverage Fix interval
Horizontal(metres)
Vertical(metres)
Alert limit(metres)
Time toalarm(Seconds)
Integrity risk(per hour)
% per30 days
% over3 hours
(seconds)
Search and rescue 10 N/A 25 10 10-5 99.8 N/A Global 1Hydrography 1 - 2 0.1 2.5 - 5 10 10-5 99.8 N/A Regional 1Oceanography 10 10 25 10 10-5 99.8 N/A Global 1Marine engineering,construction,maintenance andmanagement• dredging 0.1 0.1 0.25 10 10-5 99.8 N/A Local 1
• cable and pipeline laying
1 N/A 2.5 10 10-5 99.8 N/A Regional 1
• construction works 0.1 0.1 0.25 10 10-5 99.8 N/A Local 1
Aids to navigationmanagement
1 N/A 2.5 10 10-5 99.8 N/A Regional 1
Table 2: Search and rescue, hydrography, oceanography, marine engineering, construction, maintenance and management and aids to navigationmanagement

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 57
Kongsberg Maritime
Appendix 3, continued
System level parameters Service level parametersA c c u r a c y Integrity Availability Continuity Coverage Fix interval1
Horizontal(metres)
Vertical(metres)
Alert limit(metres)
Time toalarm1
(Seconds)
Integrity risk(per hour)
% per30 days
% over3 hours
(seconds)
Port operations Absolute accuracy• local VTS 1 N/A 2.5 10 10-5 99.8 N/A Local 1• • • • container/cargo management
1 1 2.5 10 10-5 99.8 N/A Local 1
• law enforcement 1 1 2.5 10 10-5 99.8 N/A Local 1• • • • cargo handling 0.1 0.1 0.25 1 10-5 99.8 N/A Local 1Casualty analysis Predictable accuracy• ocean 10 N/A 25 10 10-5 99.8 N/A Global 1• coastal 10 N/A 25 10 10-5 99.8 N/A Global 1• port approach and restricted waters
1 N/A 2.5 10 10-5 99.8 N/A Regional 1
Offshore explorationand exploitation
Absolute accuracy
• exploration 1 N/A 2.5 10 10-5 99.8 N/A Regional 1• appraisal drilling 1 N/A 2.5 10 10-5 99.8 N/A Regional 1• field development 1 N/A 2.5 10 10-5 99.8 N/A Regional 1• support to production
1 N/A2 2.5 10 10-5 99.8 N/A Regional 1
• post-production 1 N/A2 2.5 10 10-5 99.8 N/A Regional 1
Notes: 1: More stringent requirements may be necessary for ships operating above 30 knots.2: A vertical accuracy of a few cm (less than 10) is necessary to monitor platform subsidence.
Table 3: Port operations, casualty analysis, and offshore exploration and exploitation

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 58
Kongsberg Maritime
Appendix 3, continued
System level parameters Service level parametersA c c u r a c y Integrity Availability Continuity Coverage Fix interval1
Horizontal(metres)
Vertical(metres)
Alert limit(metres)
Time toalarm1
(Seconds)
Integrity risk(per hour)
% per30days
% over3hours
(seconds)
Fisheries Absolute accuracy• location of fishing grounds
10 N/A 25 10 10-5 99.8 N/A Global 1
• positioning during fishing2
10 N/A 25 10 10-5 99.8 N/A Global 1
• yield analysis 10 N/A 25 10 10-5 99.8 N/A Global 1• • • • fisheries monitoring 10 N/A 25 10 10-5 99.8 N/A Global 1Recreation andleisure
Predictable Accuracy
• Ocean 10 N/A 25 10 10-5 99.8 N/A Global 1• Coastal 10 N/A 25 10 10-5 99.8 N/A Global 1• Port approach and restricted waters
10 N/A 25 10 10-5 99.8 99.97 Regional 1
Notes: 1: More stringent requirements may be necessary for ships operating above 30 knots2. Positioning during fishing in local areas may have more stringent requirements.
Table 4: Fisheries, recreation and leisure application

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: 59
Kongsberg Maritime
END OF DOCUMENT

GALILEIREF :
DATE :
GALI-G3A-TN0120 June 2003
Galileo performance vs maritime GNSS requirements ISSUE : 1.1 PAGE: i
Kongsberg Maritime
DOCUMENT DISTRIBUTION
From : John KlepsvikProject Acronym : GALILEIProject Name : Galilei Task G3ATitle : Galileo performance vs maritime GNSS requirementsIssue : 1.1Reference/identification : GALI-G3A-TN01Date : 30/06/03Page Number : 59File : G3A_TN01_1_1.docClassification : PUWBS : G3A4Contract : GMA1-42031-2001-SI2.324077Type of Document : TNTemplate Name : G3A_FirstReport.dot
To :
DistributionCompany Name N° Ex. Company Name N° Ex.