supernovae rate in rcs-2 fields - pucbarrien/alumnos/josefina_michea.pdf · collapse due to the...
TRANSCRIPT

Pontificia Universidad Catolica de Chile
Instituto de Astrofısica
Facultad de Fısica
Supernovae Rate in RCS-2 Fields
by
Josefina Michea Karmelic.
Practice report presented to the Physics Faculty of Pontificia
Universidad Catolica de Chile, as one of the requirements for the
Bachelor degree in Astronomy.
Supervisor : Dr. Luis Felipe Barrientos
Correctors : Dr. Timo Anguita
: Dr. Alejandro Clocchiatti
July, 2013
Santiago – Chile

Abstract
Blah
2


Contents
1 Introduction 9
1.1 Type Ia Supernovae . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2 Supernovae Rates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3 The Red-Sequence Cluster Survey 2 . . . . . . . . . . . . . . . . . . . . . . 12
1.3.1 LRG Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3.2 Expected Number of Supernovae . . . . . . . . . . . . . . . . . . . 13
2 Working with the Data 14
2.1 Constructing the Difference Images . . . . . . . . . . . . . . . . . . . . . . 14
2.1.1 Galaxy Stamps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.1.2 Cosmic Ray Removal . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.1.3 Sky Level Subtraction . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.1.4 Convolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.1.5 Galaxy Center Determination . . . . . . . . . . . . . . . . . . . . . 19
2.1.6 Image Shifting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1.7 Image Subtraction . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.2 Running SExtractor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.2.1 Configuration and Parameters . . . . . . . . . . . . . . . . . . . . . 24
4

2.2.2 Constructing a Catalog of Candidates . . . . . . . . . . . . . . . . . 25
2.2.3 Visual Checking for Supernovae . . . . . . . . . . . . . . . . . . . . 31
3 Results 32
3.1 Detected Supernovae . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2 Supernovae Rate Calculation . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.1 Redshift Distribution . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2.2 Type Ia SN Light Curve . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2.3 Supernovae Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4 Conclusions and Future Work 45
5 References 46
6 Appendix 48
6.1 Convolving Data with Gaussian Distributions . . . . . . . . . . . . . . . . 48
6.1.1 Convolution Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.1.2 Fourier Transform of a Gaussian Distribution . . . . . . . . . . . . 48
6.1.3 Convolving and Deconvolving . . . . . . . . . . . . . . . . . . . . . 50
5

Figure Index
2.1 The full width at half maximum of a gaussian distribution . . . . . . . . . 17
2.2 Determination of the central position of a galaxy . . . . . . . . . . . . . . 20
2.3 The field in a cutout LRG image . . . . . . . . . . . . . . . . . . . . . . . 21
2.4 Example of the difference image of a LRG . . . . . . . . . . . . . . . . . . 23
2.5 Histogram: residuals’ distance to the center of their galaxy . . . . . . . . . 26
2.6 Contour plots: ellipticity versus flux of the residuals . . . . . . . . . . . . . 28
2.7 r-i contour plots: ellipticity versus flux of the preliminar candidates at
different radii from the center . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.8 i-r contour plots: ellipticity versus flux of the preliminar candidates at
different radii from the center . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1 Histogram: SNe’s distance to the center of their galaxy . . . . . . . . . . . 34
3.2 Supernovae images . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.3 Histogram: redshift distribution of the LRGs in the catalog . . . . . . . . . 40
3.4 Light curve in the r band of the supernova SNLS-04D3fk . . . . . . . . . . 42
6

Table Index
3.1 LRGs that host SNe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7

Chapter 1
Introduction
LRGs: Most luminous galaxies in clusters are a very homogeneous population. Very
narrow range of color and intrinsic luminosity. Because these objects are intrinsically
very luminous, they can be observed to great distance.
Motivation: Why SNe in LRGs?
SNe Ia rate is much lower in ellipticals compared to spirals –¿ less SNe occurr in
ellipticals; less motivation to study elliptical rates.
It is difficult to find SNe at high redshift. Generally, spectroscopy can’t be done to
the hosting galaxy; not seen, too far away –¿ cannot know the redshift.
Elliptical galaxies -¿ found in clusters. In the case of finding a SNe in a galaxy that
belongs to a cluster, spectroscopy can be done to the brightest member of the cluster –¿
we can know the redshift. No dust!!!
Specifically LRGs: the brightest, most massive elliptical galaxies in clusters.
High redshift SNe =¿ Cosmological interest. We can determine distances to constrain
cosmological parameters -¿ accelerating expanding universe.
9

1.1 Type Ia Supernovae
Type Ia SNe can be well defined by certain persistent properties of their spectra. From
Carroll & Ostlie 2007, type Ia SNe are characterized by the lack of hydrogen lines, while
they do present strong Si II lines, including neutral and ionized O, Mg, S, Ca and Fe.
Taking into consideration that H is the most abundant element in the universe, type Ia
SNe seem to be evolved objects. They could have lost their H due to some mechanism,
or burnt-out their H by converting it to heavier elements. Moreover, their spectra also
shows evidence of mass loss (P-Cygni profile) and of high expansion velocities of material
that is being ejected (due to blueshifted absorption features).
These defining characteristics can be understood when inquiring into the origins of
type Ia SNe. They originate from white dwarfs; compact and dense evolved stars that are
supported by electron degeneracy pressure. White dwarfs are the last evolutionary stage
of main-sequence stars stars that are not massive enough to become neutron stars. A
type Ia SNe occurs when the white dwarf surpasses the Chandrasekhar limit, that is, the
maximum mass that can be sustained by electron degeneracy pressure: around 1.4M�.
When the electron degeneracy pressure is unable to counteract the star’s gravitational
collapse due to the increment in mass, the white dwarf explodes in a type Ia SNe, often
leaving a neutron star or a black hole as a remnant.
There are two possible scenarios as to how a white dwarf becomes a type Ia SN,
and both involve mass transfer from a companion star. These are known as the double-
degenerate and single-degenerate models (Carroll & Ostlie 2007). In the double-degenerate
model, two white dwarfs coexist in a binary orbit. Due to the emission of gravitational
waves that will carry energy and angular momentum away from the system, the stars
will start to spiral together. The secondary star –less massive, but with a larger radius–
will eventually spill its C-O rich material onto the more massive primary. Hence, when
10

the primary star surpasses the Chandrasekhar limit, it will explode into a type Ia SNe.
On the other hand, the single-degenerate model consists of an evolving star and a white
dwarf in a binary orbit. What exactly happens with the non-degenerate material that
spills from the evolving star onto the white dwarf is uncertain. An option is that if enough
helium settles, the degenerate C-O in the center of the white dwarf could ignite, and the
degenerate gas would not longer be able to support the mass of the star. Another option is
that material is simply spilled onto the white dwarf until it surpasses the Chandrasekhar
limit. Either way, the resolution is a type Ia SN.
Type Ia SNe are present in both passive galaxies (ellipticals, like LRGs) and star-
forming galaxies (spirals and irregulars). Notwithstanding, types Ib, Ic, II SNe have only
been observed in star-forming regions where formation of massive stars has taken place.
These SNe types consist of core-collapse events, in which massive stars evolve, become
degenerate and surpass the Chandrasekhar limit.
Elliptical galaxies show little evidence of recent star-formation activity, and are con-
stituted by older, low-mass stars. Therefore, the only kind of SNe that can be found on
LRGs are types Ia.
Type Ia SNe are consistent events. Their maximum energy output varies within a
small and constrained magnitude range. Moreover, there is a relationship between the
peak brightness and the rate of decline of their light curve, in which the light of the most
energetic SNe declines slower (Carroll & Ostlie 2007). Therefore, an orderly progression
from the most-luminous and slowest-declining events to the less-luminous and fastest-
declining events can be established and studied (Hamuy et al. 1996). This level of
consistency makes type Ia SNe an ideal tool to study the universe: they can be used to
constrain cosmological parameters, and ultimately probe the structure of the universe to
great distances (Leibundgut 2008).
11
1.2 Supernovae Rates
There is a very small n of sne known in elliptical galaxies, and the statistics are very
uncertain –¡ motivation! ()
In literature. - approx 20-30 times bigger in later galaxies.
1.3 The Red-Sequence Cluster Survey 2
The second Red-sequence Cluster Survey (RCS-2)
Red-sequence Cluster Survey sample of galaxy clusters optically selected. Method:
cores of galaxy clusters are dominated by galaxies with old stellar populations, form-
ing a tight red-sequence in color magnitude space -¿ red-sequence based cluster finding
algorithms.
Square degree imager, Megacam, with wide-field imager capabilities installed on the
3.6 m Canada-France-Hawaii Telescope (CFHT).
(Gilbank et al. 2011).
- 1 pixel corresponds to 0.185 arcseconds. - The g, r, and z filter imaging is done under
a same observation, while i filter imaging is incorporated later. Only around 70% of the
survey is i filter covered.
*poner grafico tiempo i-r, pedir al profesor.
For our time variability study, we are interested either in the g, r or z filter image and
in the i filter image, which is taken one year later in average. We will be using filter r
(*because...).
12

1.3.1 LRG Selection
LRGs are selected from the RCS-2 object catalog using a color criteria. (*Which is...:).
This results in a selection of 62812 galaxies.
From the preliminary galaxy selection, LRGs must meet certain requirements to be
of use for this study. First, galaxies that were not covered by i filter imaging are of no
use, and therefore are discarded. Approximately a 72.8% (45751) from our initial 62812
galaxies have i filter images. Second, the specific pointings of the fields in which our
galaxies appear must have had their seeing measured. This is necessary for a later step
in the data analysis, detailed in section 2.1.4. While all objects had their observation
seeing measured during the r filter imaging, some i filter imaging has no information on
the seeing of their night. This narrows our LRG catalog to 36070 objects, and for each
one we have the following essential information:
→ the patch in which the galaxy is found,
→ its coordinates (right ascension and declination), and
→ the seeing of the specific pointing in which the galaxy was observed, in terms of the
FWHM of a point source (for both the r and i filters).
1.3.2 Expected Number of Supernovae
Based on SNe rates in literature. As they were taken with a year difference in average,
sn could occurr in r or in i.
13

Chapter 2
Working with the Data
2.1 Constructing the Difference Images
2.1.1 Galaxy Stamps
The first step is to access the RCS-2 patches and make cutouts of the LRGs in the
constructed catalog. This is done using a script designed for this purpose by Dr. Luis
Felipe Barrientos. By providing the right ascension and declination of each galaxy, an
approximate size of the desired aperture and an outname, the script makes precise cutouts
from the r and the i filter pointings.
Apertures of about 0.3 arcminutes were considered to be suficient to cover up the
galaxies’ span on the sky. This results in r and i filter images of dimensions 89×89
pixels for each LRG –which correspond, more precisely, to an aperture of 0.274×0.274
arcminutes centered on the galaxy–.
14

2.1.2 Cosmic Ray Removal
A first look through the r and i filter images of the LRGs shows that they are not cosmic
ray clean. High-energy charged particles –mostly protons– originating from sources like
quasars, SNe, active galactic nuclei and magnetic variable stars penetrate the Earth’s
atmosphere and hit the CCD chips directly; not necessarily passing through the telescope.
Due to their high energies they leave very bright, sharp dots or trails on the pixel (or pixels)
on which they land.
Cosmic rays contaminate the science images and, if not removed, could eventually lead
to wrong conclusions –for example, by confusing them with SNe–. We use the Laplacian
Cosmic Ray Identification (L.A.Cosmic) program written by Pieter G. van Dokkum (van
Dokkum 2001) to clean the images from cosmic rays. The algorithm distinguishes between
poor sampled sources and cosmic rays, identifying them based on their brightness and the
sharpness of their edges.
Using the lacos im task in the IRAF (Image Reduction and Analysis Facility) soft-
ware, we clean the r and i filter image of each galaxy from cosmic rays. As a precaution,
the parameter that assigns the number of iterations of the algorithm over an image (niter)
is set to 1, so that, primarily, the most evident cosmic rays are removed. Hopefully, this
yields a smaller risk of affecting possible SNe.
2.1.3 Sky Level Subtraction
The r and i filter images of each galaxy have different sky levels. As we wish to make the
different filter images comparable, it is necessary to equate these values. This is done by
determining the sky level from each image and then subtracting it, leaving a baseline sky
value bordering zero.
15

As the galaxies are positioned relatively at the center of their cutouts, it can be
assumed that the sky begins at a certain radius –the boundaries of the galaxy– and
extends towards the borders of the image. If we suppose that LRGs have a typical size
in the sky of 10 arcseconds, then a central aperture of 50 pixels in diameter is enough
to cover up the extension of most galaxies. Therefore, by applying a circular mask of 50
pixels in diameter at the center of each r and i filter image, we compute the median to
the pixels that lie beyond the mask –which are considered to represent the sky–. This
median sky value is then subtracted to the whole image.
2.1.4 Convolution
The observations in which we find our galaxies were taken in an extended period of time
–throughout different nights–; therefore, each pointing ocurred under different atmospher-
ical conditions. Factors like the turbulence of the Earth’s atmosphere and the humidity
level of a night define the astronomical seeing of an observation. The lower the seeing
value, the better the quality of the data attained. The seeing makes the response of an
astronomical instrument to a light source a variable factor in time.
Moreover, point sources –like stars– detected by a telescope are not captured by the
ccd as points; instead, they occupy a certain area that is dependent on the instrumental
properties of the telescope and the specific seeing under which the observation takes place.
This response of an imaging system to a light source is characterized by a point spread
function (PSF).
As the observations using the r and i filters took place in separate time spans, each
LRG has a characteristic PSF in its r filter image and in its i filter image. To quantify
the difference in the PSFs of a galaxy in each filter, we take into consideration the full
width at half maximum (FWHM) of the gaussian distribution of a point source present in
16

each pointing –illustrated in figure 2.1–. This information is provided by the RCS-2 data,
hence we have a FWHM value for the r and i filter images of each LRG in our catalog.
x
fmax/2
fmax
f(x)
FWHM
Gaussian Distribution
Figure 2.1: The full width at half maximum of a gaussian distribution. The value of the
FWHM is the same for all point sources in a given pointing.
The FWHM relates to the standard deviation σ of its gaussian distribution through
the equation
FWHM = 2√2 ln 2 σ (2.1)
Where a gaussian function has the form
g(x) =1
σ√2π
exp
((x− µ)2
2σ2
)(2.2)
17

Therefore, through equation (2.1), we can define the standard deviation of a gaussian
function in a r filter image as σr and in an i filter image as σi. The next step is to take the
r and i filter images of each LRG and make their PSFs match, so we can compare them
on equal terms. To achieve this, the first step is to determine which filter image was taken
under better seeing conditions: it will correspond to the image with the lowest FWHM,
and therefore the lowest σ value. Once we have identified it, we procede to worsen its
PSF so that it comes to agreement with the PSF of the image with the worst seeing.
Let us define the standard deviation σ in the image with the best seeing as σsmall, and
for the image with the worst seeing as σbig. The image with the best seeing is already
convolved with a gaussian function with σsmall, while the image with the worst seeing
is convolved with a gaussian function with σbig. As we want to match their PSFs, the
image with the best seeing has to be convolved with a gaussian function with σbig and
then deconvolved with a gaussian function with σsmall. Conceptually, in fourier space,
F(resulting image) = F(original image) · F(gaussian with σbig)
F(gaussian with σsmall)(2.3)
where F denotes a fourier transform. As demonstrated in appendix 6.1, this expression
is equivalent to
F(resulting image) = F(original image) · k · F(gaussian with σ∗) (2.4)
where k is some numerical constant and
σ∗ =√σ2big − σ2
small (2.5)
That is, the filter image with the best seeing –lowest FWHM and σsmall– must be
convolved with a gaussian function with standard deviation σ∗ =√
σ2big − σ2
small. We will
disregard the constant k as we will be scaling the galaxy’s counts in each image afterwards,
as described in section 2.1.7.
18

In summary, for each LRG in our catalog, we first examine the FWHM values of their r
and i images, then calculate the σbig and σsmall values (equation (2.1)) to determine which
of the two images will have to be convolved, and finally compute the standard deviation
σ∗ (equation (2.5)). The convolution between the image with the lowest FHWM value
and a gaussian function with σ∗ is done using the gauss task in IRAF, located in the
images.imfilter package.
2.1.5 Galaxy Center Determination
The galaxy cutouts were generated with the LRGs relatively at the center of their image.
However, if we want to do difference imaging, it is imperative for the galaxies to accurately
share a central position on their r and i filter images. Therefore, the first step is to
determine with precision the central pixel coordinates (xc, yc) of each LRG in both of its
images, so they can be aligned afterwards (as described later in section 2.1.6).
For each pixel position, we have its coordinates (x, y) and a given number of counts
z = f(x, y). We assume the galactic center (xc, yc) will correspond to the position with the
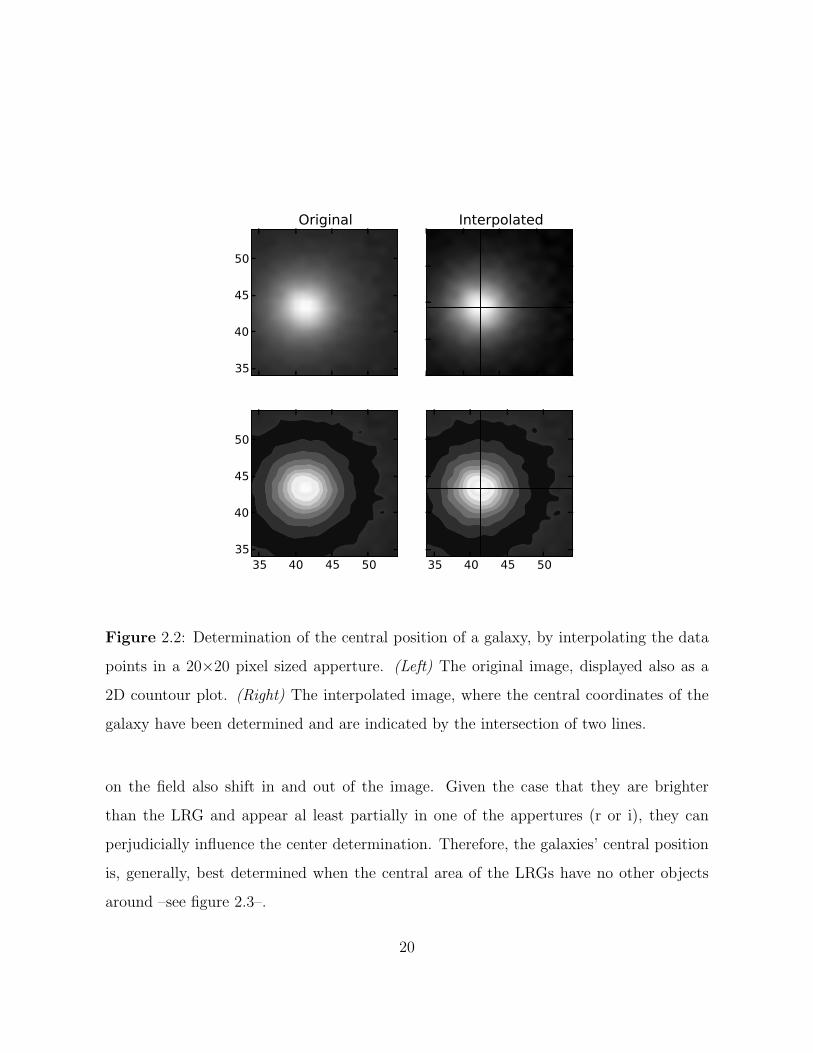
highest number of counts. To determine the center, we interpolate adjacent pixel values
to create a smooth, two dimensional surface that can be evaluated at any position. By
implementing in Python the RectBivariateSpline class in scipy.interpolate,
we use cubic spline interpolation to create a smooth 2D function based on our fixed data
points. Then, we can accurately determine the central coordinates of the LRGs based on
an apperture of 20×20 pixels positioned at the center of the image. The interpolation
procedure is illustrated in figure 2.2.
It is important to note that finding a central position value is problematic when there
are several objects on the cutout field. As the galaxies differ –sometimes more subtly and
sometimes more significantly– in their position on the r and i filter images, the object(s)
19
35
40
45
50
Original Interpolated
35 40 45 5035
40
45
50
35 40 45 50
Figure 2.2: Determination of the central position of a galaxy, by interpolating the data
points in a 20×20 pixel sized apperture. (Left) The original image, displayed also as a
2D countour plot. (Right) The interpolated image, where the central coordinates of the
galaxy have been determined and are indicated by the intersection of two lines.
on the field also shift in and out of the image. Given the case that they are brighter
than the LRG and appear al least partially in one of the appertures (r or i), they can
perjudicially influence the center determination. Therefore, the galaxies’ central position
is, generally, best determined when the central area of the LRGs have no other objects
around –see figure 2.3–.
20

Figure 2.3: Images in the r filter of two galaxies. (Left) A LRG that is the only bright
object on the field. Determining its central position does not represent any problem.
(Right) Other objects appear on the field of this LRG, but are far enough from the center
of the galaxy as to not affect the center determination. This case constitutes most of our
sample.
2.1.6 Image Shifting
Once we have the central coordinates of each LRG in our catalog, the next step is to
align their central position in their r and i filter images. Taking into consideration our
images are 89×89 pixels in size, we designate (45,45) as the universal coordinates for the
galactic center. That is, we will shift every galaxy so that their central position lies on the
coordinates (45,45). This alignment will be useful to simplify future stages in this study,
like –as described in section 2.2.2– for constructing a catalog of SNe candidates based on
their distance to the center of their galaxy.
Using the imshift task located in the images.imgeom package in IRAF, we shift
every LRG in both their r and i filter images so that they share this universal central
position. The task interpolates between data points to shift the images with decimal
21

precision.
2.1.7 Image Subtraction
To finally create the difference images, each galaxy’s counts have to be scaled so that they
match in their r and i filter image. By positioning 5×5 pixel appertures at the center
of each LRG, we are able to determine the median number of counts. This allows us to
compute a scale factor between each r and i filter image. Conceptually, if we want the r-i
difference image, then
r-i image = r− sr−i · i (2.6)
where the scale factor
sr−i =r median 5×5
i median 5×5
(2.7)
Therefore, we are scaling the i filter image to match the counts of the r filter image. If
we are interested in the i-r difference image, then we scale the r filter image:
i-r image = i− si−r · r (2.8)
where
si−r =i median 5×5
r median 5×5
(2.9)
This way, the objects that are detected in the difference images will have authentic –not
scaled– number of counts. As we will be later running the SExtractor (Source Extractor)
program over the difference images to build a catalog of possible SNe (see section 2.2), we
are interested in both the r-i and i-r difference images. SExtractor is not able to detect
negative counts as an object.
The process of difference imaging for one galaxy is illustrated in figure 2.4. It can be
observed that the subtracted images have residuals at the center. This is the case in most
22

–if not all– of our difference images. Our scaling technique based on the median value
of the central area of the galaxies is probably too rudimentary to obtain a satisfactory
subtraction at the center. Nevertheless, the difference images are successful on the areas
that lie beyond the center; towards the outskirts of the galaxy.
Figure 2.4: Example of the difference images of a LRG. (Upper row) The r filter image is
to the left, while the i filter image is to the right. Note that the r filter image looks more
blurry or softened than its counterpart because it was, in this particular case, the image
that had to be convolved with a gaussian to worsen its PSF and match the i filter image
quality. (Lower row) The difference images, r-i to the left and i-r to the right. Except
from the scaling, one is the negative of the other. The other objects present on the field
will often leave residuals, as the scaling done is only focused in subtracting correctly the
LRG.
23

2.2 Running SExtractor
Once we have created the r-i and i-r difference images for all the LRGs in our catalog,
the next step is to run the SExtractor program over them to detect possible objects, and
construct a catalog of SNe candidates.
2.2.1 Configuration and Parameters
The SExtractor configuration file is adapted so that the program runs suiting the needs of
this study. The most relevant change that is done to the default settings is the inclusion
of weight maps. The background noise level in an astronomical image is generally fairly
constant but, given the case there are noise peaks in some areas, the process of object
detection will be impaired. Therefore, we create background noise maps of each difference
image as to inform SExtractor of the noise intensity at each pixel.
The subtraction of r-i and i-r to construct the difference images means that we are
adding up the noise level of each individual image into a new image. Moreover, if we
wish to quantify the background noise, we need to add back the sky level values that were
subtracted previously (see section 2.1.3). This allows us to retreive the original weight of
each pixel. For the r-i and i-r difference images we define, respectively, their weight maps
as follows:
Wr-i = median filter 5×5
[(r+skyr) + sr−i · (i+skyi)
](2.10)
Wi-r = median filter 5×5
[(i+skyi) + si−r · (r+skyr)
](2.11)
24

The data is median filtered in 5×5 pixel sized appertures. That is, each pixel value is
smoothed out based on the median value of the surrounding pixels. The median filtering
is done in Python, using the median filter class in scipy.ndimage.filters.
The next step is to decide what do we wish to know from the objects detected by SEx-
tractor. Considering we want to find SNe candidates, the essential parameters correspond
to:
→ The pixel coordinates of the residual (X IMAGE and Y IMAGE parameters).
→ The flux of the residual and its associated uncertainty (FLUX AUTO and
FLUXERR AUTO parameters.)
→ The ellipticity of the residual (ELLIPTICITY parameter).
→ The FWHM of the residual (FWHM IMAGE parameter).
The choice of these parameters is later justified by the use we give them in section 2.2.2.
Finally running SExtractor over the difference images, we end up with a catalog consti-
tuted of 92939 possible objects from r-i and 76414 possible objects from i-r images.
2.2.2 Constructing a Catalog of Candidates
Filtering criteria must be established to discriminate in our catalog which possible objects
could be SNe candidates. We create diagnostic plots to decide how to constrain the
catalog.
For a first approach, we map the spatial distribution of the residuals in respect to the
center of their galaxy. By assuming all LRGs are spherical in shape –a simplification–,
we define the modulus distance d to the center using Pythagoras’ theorem:
d =√
(x− xc)2 + (y − yc)2 (2.12)
25

where (x, y) are the pixel coordinates of the residual in the image, and (xc, yc) = (45, 45) is
the universal center position for the galaxies, defined in section 2.1.6. Using this definition,
we plot in figure 2.5 the histogram of the residuals’ distance to the center of their galaxy
for both difference image catalogs, r-i and i-r.
0 5 10 15 20 25 30 35 40 45
modulus distance to the center (pixels)
10−1
100
101
102
103
104
num
ber
ofre
sidu
als
norm
aliz
edby
area
r-i
0 5 10 15 20 25 30 35 40 45
modulus distance to the center (pixels)
10−1
100
101
102
103
104
i-r
Figure 2.5: Histogram: residuals’ distance to the center of their galaxy. The number of
residuals in each bin have been normalized by the bin’s area. Note that the y axis is on
logarithmic scale.
The residuals in both catalogs expose a similar behavior. There is a significant accu-
mulation of possible objects in the central area of the images (up to 5 or 8 pixels from
the center). This is due to the fact that the central part of the galaxies are generally not
correctly subtracted, like previously shown on figure 2.4. Hence, possible SNe candidates
in the central area of the galaxies will be greatly outnumbered by false detections. The
decision of leaving out, from our SNe candidate catalog, residuals that lie 0 to 5 pixels
away from the center is double-edged. The number of stars in LRGs steeply decrease with
26

the distance to the center of the galaxy –elliptical galaxies have a de Vaucouleurs profile–.
Therefore, under the assumption that more stars mean more possibilities of a type Ia SN
occurring, we are cutting out the pixel range with highest probability of sheltering SNe.
Despite this, we will omit the central area as it is too deeply contamined.
The decreasing number of residuals with the distance to the center ends with a small
peak towards d = 40 pixels. This behavior could be illustrating another area that is high
in contaminant residuals.
Another diagnostic plot is the ellipticity versus the flux of the residuals in both r-i and
i-r catalogs, shown in figure 2.6. The ellipticity e of the residuals is defined as
e = 1− b
a(2.13)
where b corresponds to the semi-minor axis and a to the semi-major axis length. Therefore,
the more rounded residuals are the ones with a smaller e value. As stars are spherical
objects, we could expect SNe to be observed approximately spherical as well, assuming
that the explosion is relatively isotropic.
We can observe that the distribution concentrates around e = 0.4 with a span between
the 103 to 104 flux values. There is also a high flux and highly elliptical group, most likely
dominated by contaminants. As we are unsure about the possible brightness range of SNe
in our images –the flux values are not calibrated–, we decide to only cut by ellipticity.
To elude the concentration at e = 0.4, probably constituted by the high number of
contaminants in the central area, we decide to search for SNe at ellipticities below e = 0.2.
Another parameter we take into consideration to constrain our sample is the FWHM
of the residuals. We had added in the configuration file of SExtractor that starlike objects
would have a FWHM of around 4 pixels. Based on this conjecture, and considering that
SNe are not very extended objects, we impose FWHM < 10 pixels for our SNe candidates.
27
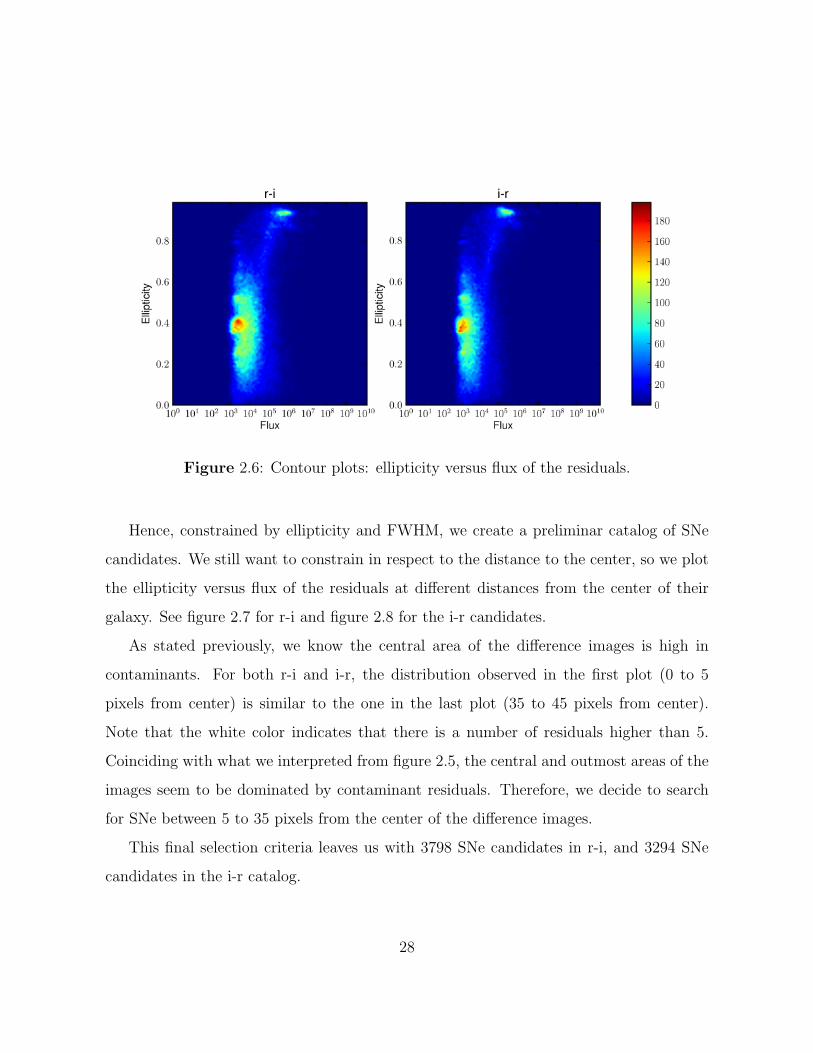
Figure 2.6: Contour plots: ellipticity versus flux of the residuals.
Hence, constrained by ellipticity and FWHM, we create a preliminar catalog of SNe
candidates. We still want to constrain in respect to the distance to the center, so we plot
the ellipticity versus flux of the residuals at different distances from the center of their
galaxy. See figure 2.7 for r-i and figure 2.8 for the i-r candidates.
As stated previously, we know the central area of the difference images is high in
contaminants. For both r-i and i-r, the distribution observed in the first plot (0 to 5
pixels from center) is similar to the one in the last plot (35 to 45 pixels from center).
Note that the white color indicates that there is a number of residuals higher than 5.
Coinciding with what we interpreted from figure 2.5, the central and outmost areas of the
images seem to be dominated by contaminant residuals. Therefore, we decide to search
for SNe between 5 to 35 pixels from the center of the difference images.
This final selection criteria leaves us with 3798 SNe candidates in r-i, and 3294 SNe
candidates in the i-r catalog.
28

Figure 2.7: r-i contour plots: ellipticity versus flux of the preliminar candidates at dif-
ferent radii from the center.
29

Figure 2.8: i-r contour plots: ellipticity versus flux of the preliminar candidates at dif-
ferent radii from the center.
30

2.2.3 Visual Checking for Supernovae
The next step is to visual check each difference image and evaluate which candidates could
be SNe. For each LRG with a candidate, we concatenate the original r and i filter images,
the difference image and the check image that was generated by SExtractor. This allows
us to efficiently filter our catalog.
Most of our catalog was constituted by detections of field objects. As previously
stated in section 2.1.7, the scaling for the subtraction is focused in subtracting correctly
the LRG, and not the whole field. Hence, field objects generally display residual flux in
the difference image. Another common case was that either the r or i filter image would
have its objects shifted and duplicated –like a blurred out photograph–, resulting in false
detections. Finally, there were also cases of faulty columns that prevented a good galaxy
center determination and ended up as defective subtractions.
Once the possible SNe are selected from the catalog, we generate cutouts of their LRGs
in the g and z filters. This is done to further ensure that they are, in fact, SNe, and not
just objects that are r or i filter dropouts. Taking into account that the g, r and z images
were taken during a short time span while the i filter images were taken a year later in
average, we postulate that for an object to be a SNe in a r-i difference image it has to
appear in g, r, z but not in i, and the other way around if it were a SNe in a i-r difference
image. Using this method, we are able to discard several false cases we had classified as
SNe.
Our catalog of SNe ends up finally constituted by a total of 23 SNe detections; 14 in
the r filter and 9 in the i filter images.
31

Chapter 3
Results
3.1 Detected Supernovae
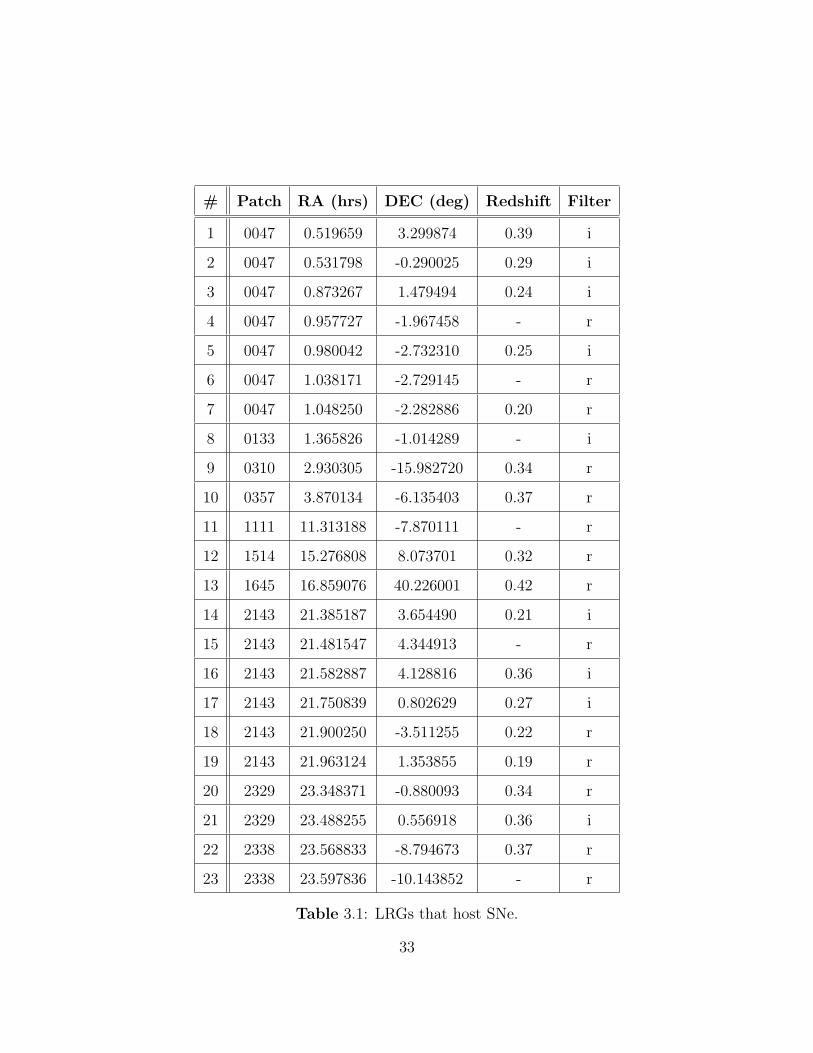
The patch, coordinates and redshift of the LRGs we found hosting SNe are displayed in
table 3.1, for both the r and i filter detections. Their redshift was computed photomet-
rically using the g, r and z bands by Dr. Timo Anguita, and have a 0.05 magnitude
uncertainty. These LRGs have a median redshift value of z = 0.32. We do not have a z
value for all the LRGs as the catalog of LRGs used is not exactly the same as the one
from this study. Moreover, cases of bad measurements in a particular band did not allow
the redshift to be calculated.
The detected SNe have a median ellipticity of e = 0.083 and a median FWHM value
of 4.51. Therefore, our selection criteria when constructing the SNe candidate catalog
(e < 0.2 and FWHM < 10) seems to have been appropiate, although we could have been
more drastic when constraining in FWHM.
The distribution in position of the SNe is shown on figure 3.1. We had a lower number
of SNe detections near the center and in the extreme outskirts of their galaxies. There is
32
# Patch RA (hrs) DEC (deg) Redshift Filter
1 0047 0.519659 3.299874 0.39 i
2 0047 0.531798 -0.290025 0.29 i
3 0047 0.873267 1.479494 0.24 i
4 0047 0.957727 -1.967458 - r
5 0047 0.980042 -2.732310 0.25 i
6 0047 1.038171 -2.729145 - r
7 0047 1.048250 -2.282886 0.20 r
8 0133 1.365826 -1.014289 - i
9 0310 2.930305 -15.982720 0.34 r
10 0357 3.870134 -6.135403 0.37 r
11 1111 11.313188 -7.870111 - r
12 1514 15.276808 8.073701 0.32 r
13 1645 16.859076 40.226001 0.42 r
14 2143 21.385187 3.654490 0.21 i
15 2143 21.481547 4.344913 - r
16 2143 21.582887 4.128816 0.36 i
17 2143 21.750839 0.802629 0.27 i
18 2143 21.900250 -3.511255 0.22 r
19 2143 21.963124 1.353855 0.19 r
20 2329 23.348371 -0.880093 0.34 r
21 2329 23.488255 0.556918 0.36 i
22 2338 23.568833 -8.794673 0.37 r
23 2338 23.597836 -10.143852 - r
Table 3.1: LRGs that host SNe.
33
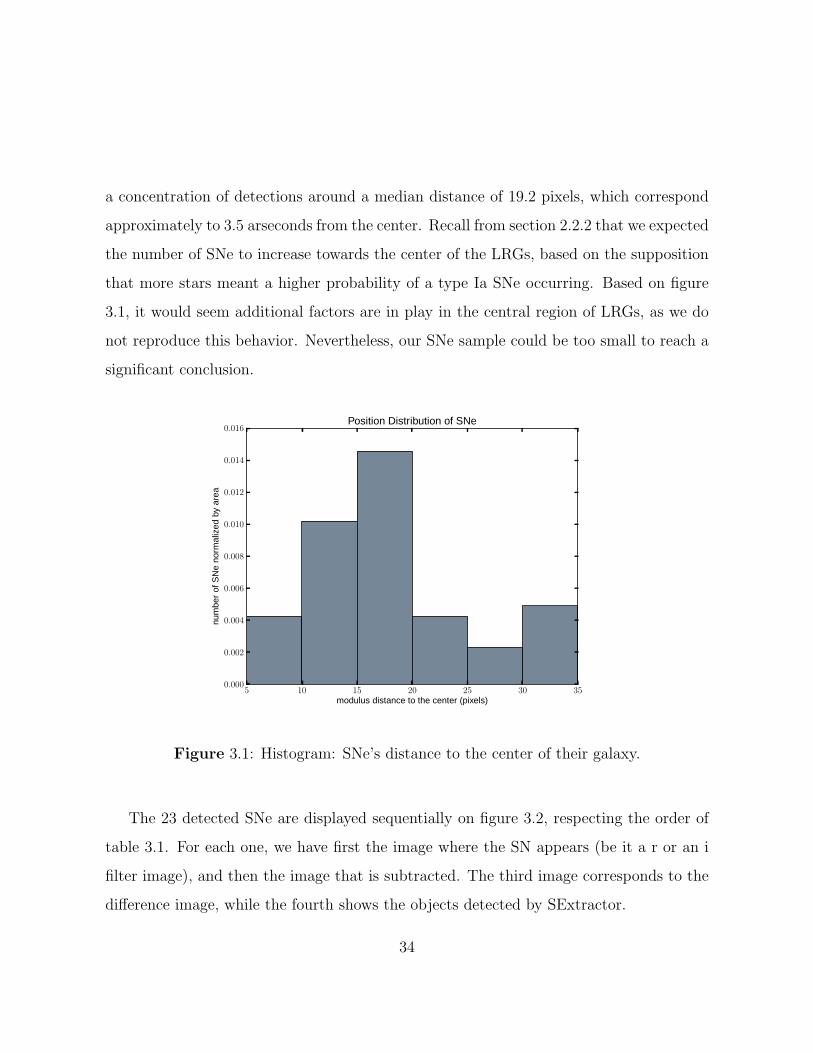
a concentration of detections around a median distance of 19.2 pixels, which correspond
approximately to 3.5 arseconds from the center. Recall from section 2.2.2 that we expected
the number of SNe to increase towards the center of the LRGs, based on the supposition
that more stars meant a higher probability of a type Ia SNe occurring. Based on figure
3.1, it would seem additional factors are in play in the central region of LRGs, as we do
not reproduce this behavior. Nevertheless, our SNe sample could be too small to reach a
significant conclusion.
5 10 15 20 25 30 35
modulus distance to the center (pixels)
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
0.016
num
ber
ofS
Ne
norm
aliz
edby
area
Position Distribution of SNe
Figure 3.1: Histogram: SNe’s distance to the center of their galaxy.
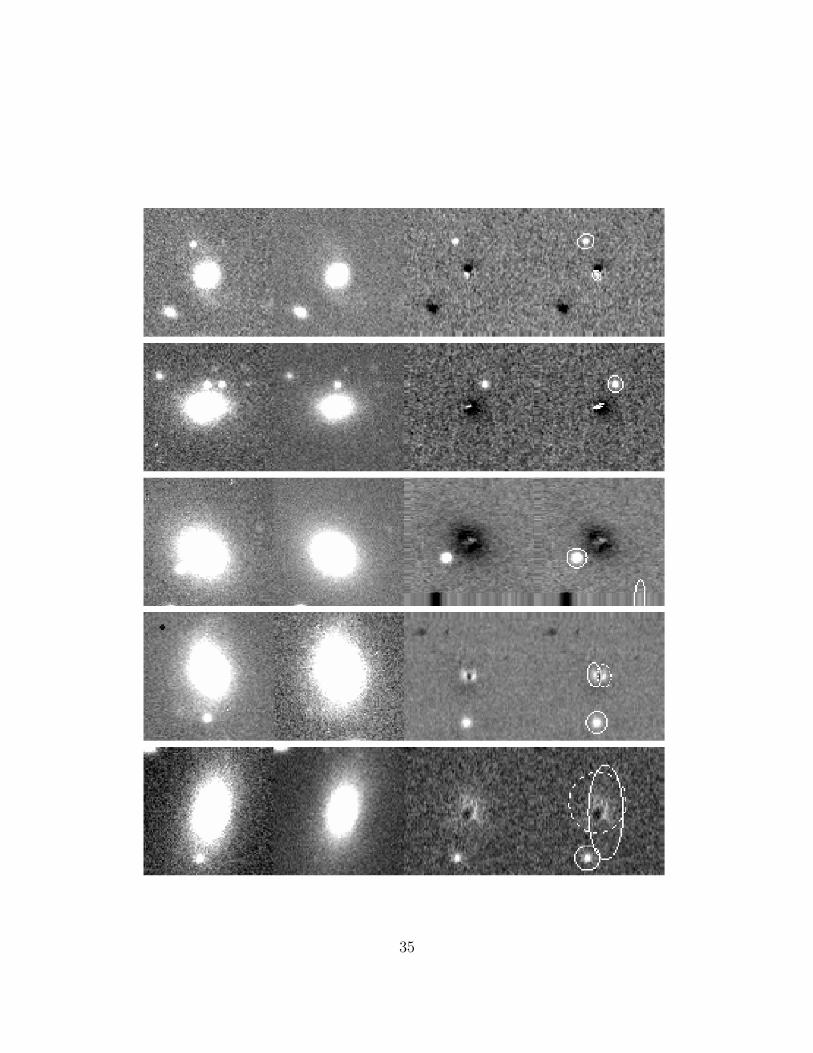
The 23 detected SNe are displayed sequentially on figure 3.2, respecting the order of
table 3.1. For each one, we have first the image where the SN appears (be it a r or an i
filter image), and then the image that is subtracted. The third image corresponds to the
difference image, while the fourth shows the objects detected by SExtractor.
34
35

36

37

38

Figure 3.2: Supernovae images.
3.2 Supernovae Rate Calculation
We are still missing information if we wish to compute a SNe rate: specifically, the time
span ∆t during which a SN stays detectable. To compute it, we first determine the median
redshift of all the LRGs in the catalog. Thus, we look for a type Ia SN that occurred at
that z, and use its light curve as a model. By imposing the apparent magnitude limit at
which we can detect SNe at that redshift, we can derive a ∆t value and finally calculate
a SNe rate.
39

3.2.1 Redshift Distribution
As our LRG catalog and the catalog of LRGs that had their redshift computed have most
of their galaxies in common, we assume their redshift distributions are similar. Figure
3.3 shows that the redshift distribution of the LRGs is concentrated between z = 0.2 and
0.5, with a median redshift of 0.36. We will assume an associated uncertainty given by a
standard deviation away (1σ) from the median of the distribution.
0.0 0.2 0.4 0.6 0.8 1.0
Redshift
0
1000
2000
3000
4000
5000
6000
7000
Num
ber
ofLR
Gs
median z = 0.36
Redshift Distribution of LRGs
Figure 3.3: Histogram: redshift distribution of the LRGs in the catalog. The median
redshift is z = 0.36± 0.08.
It is preferable to employ the median redshift of all the LRGs in the catalog than just
the median redshift of the LRGs we found hosting SNe. The LRGs with SNe constitute a
small and incomplete sample, as we do not have a redshift for several cases (see table 3.1).
Moreover, as there is a magnitude limit that constrains the SNe catalog we constructed
40

–more on this on the next section–, so the fainter SNe we did not detect would not enter
in the calculation. It is safer to assume that the SNe lie around the redshift where all the
LRGs of the catalog concentrate. Therefore, we will work under the assumption that the
SNe in our LRG catalog lie around a redshift value of z = 0.36± 0.08.
3.2.2 Type Ia SN Light Curve
The light curves of SNe are affected by redshift. SNe at higher redshifts are perceived as
visible during longer periods of time; according to the theory of relativity, time is dilated
in a (1 + z) factor. This is known as cosmological time dilation, which is related to the
expansion of the universe –if a photon is emitted at redshift z, then the universe is a
factor (1 + z) bigger when it is observed–.
SNe light curves have to undertake the process of K-correction to be converted into
the rest frame. That is, our redshifted SNe would need to be blueshifted to bring them
to z = 0. Additionally, as our objects were observed through the r and i filters, only a
partial wavelength range of their total spectrum has been measured. When brought to
the rest frame, their wavelength ranges will not be corresponded, respectively, to r and i
passbands. They will fall under bluer passbands.
However, it is not necessary to engage in the complexities of K-correction, as we are
not interested in SN light curves in the rest frame. Instead, we need a type Ia SN that
occurred around redshift z = 0.36±0.08, that has not been K-corrected, and that has been
measured using r and i filters. As type Ia SNe are relatively invariant events, consistent
in the maximum energy output and the rate of decline of their light curves (see section
1.1), we can choose a particular SN light curve at z ≈ 0.36 and expect the other cases at
that z to be quite similar.
From the SuperNova Legacy Survey (SNLS, Astier et al. 2006) we choose SNLS-
41
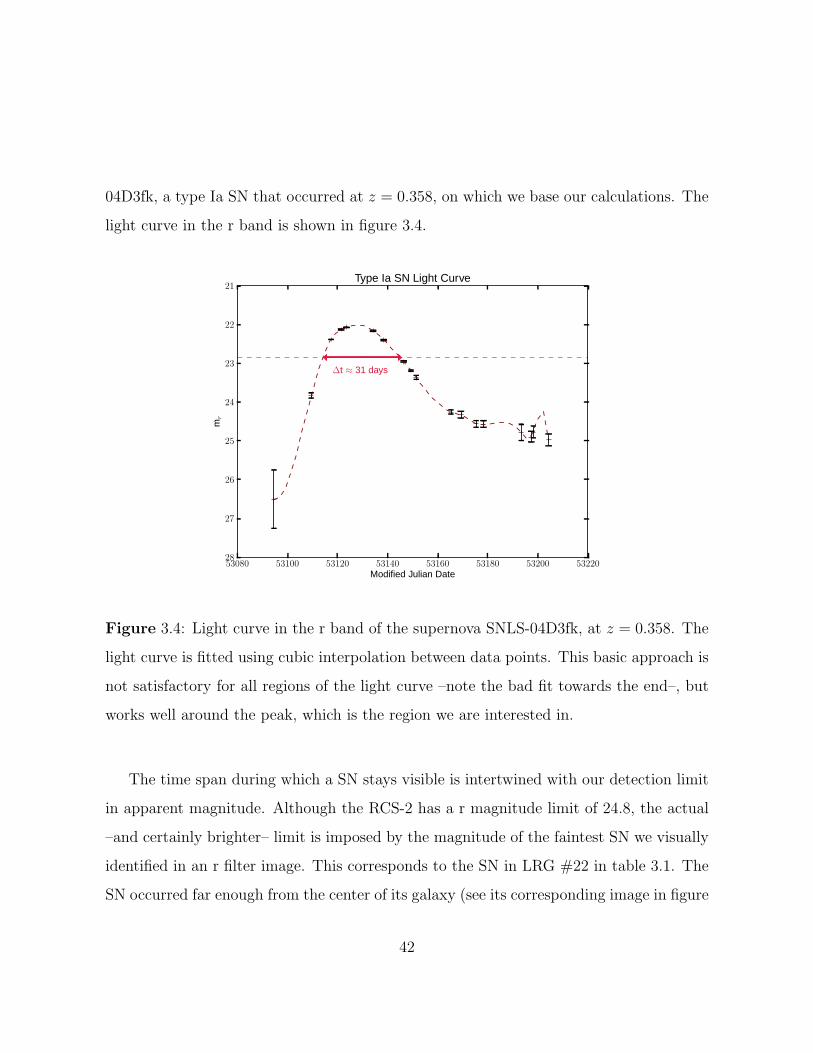
04D3fk, a type Ia SN that occurred at z = 0.358, on which we base our calculations. The
light curve in the r band is shown in figure 3.4.
53080 53100 53120 53140 53160 53180 53200 53220
Modified Julian Date
21
22
23
24
25
26
27
28
mr
∆t ≈ 31 days
Type Ia SN Light Curve
Figure 3.4: Light curve in the r band of the supernova SNLS-04D3fk, at z = 0.358. The
light curve is fitted using cubic interpolation between data points. This basic approach is
not satisfactory for all regions of the light curve –note the bad fit towards the end–, but
works well around the peak, which is the region we are interested in.
The time span during which a SN stays visible is intertwined with our detection limit
in apparent magnitude. Although the RCS-2 has a r magnitude limit of 24.8, the actual
–and certainly brighter– limit is imposed by the magnitude of the faintest SN we visually
identified in an r filter image. This corresponds to the SN in LRG #22 in table 3.1. The
SN occurred far enough from the center of its galaxy (see its corresponding image in figure
42

3.2) as to have been detected as an object and included in the RCS-2 catalog. Hence,
photometry has been done on this particular SN, and has an r apparent magnitude of
mr = 22.84± 0.03.
However, photometric information of RCS-2 is only available in the g, r and z bands, so
we cannot determine the i magnitude of the faintest SN that occurred in an i filter image.
We will work under the assumption that the r and i passbands have similar sensibilities,
so the light curve would not vary significantly in shape.
Abiding by this magnitude limit, our model SN (figure 3.4) would have stayed de-
tectable during ∆t = 30.69± 1.81 days, where the error range is given by the uncertainty
we have in redshift. Note that this time span is already affected by time dilation, so it
corresponds to what we would observe from Earth. As previously stated, due to the lack
of i band photometry, we will consider this time span to be representative for SNe in both
r and i filter images.
3.2.3 Supernovae Rate
Finally, we have acquired all the necessary pieces to compute a type Ia SNe rate. Recapit-
ulating, from a total of 36070 LRGs, we found that 23 were hosting SNe. Consequently,
we have a factor of occurrence: (23/36070). Under the assumption that LRGs have a
typical mass of ∼ 1011M�, and that type Ia SNe at redshift z = 0.36 ± 0.08 stay visible
during a time span of ∆t = 30.69± 1.81 days,
SNR =
(23
36070
)per 1011M� per 2×∆t (3.1)
where the factor 2 affecting ∆t is due to the fact that SNe could have been detected either
in the r filter or in the i filter image. Therefore,
43

SNR =(23/36070)
2 · (30.69± 1.81) days · 1011M�(3.2)
We need to transform this rate to Supernova Units (SNu),
SNu =
[# events
century · 1010M�
](3.3)
Let us perform this transition in a logical way. First, there is a higher possibility
of finding SN in a century time span than in 2 × (30.69 ± 1.81)) days. As a century
corresponds to (365.25 · 100) days, multiplying our factor of occurrence by (365.25 · 100)
means an increase, which is conceptually correct. Second, in 1011M� there should be 10
times more SNe than in 1010M�, so we have to divide our factor of occurrence by 10.
Hence,
SNR =(23/36070) · (365.25 · 100)
2 · (30.69± 1.81) · 101
century · 1010M�(3.4)
Which finally gives us the SNe rate:
SNR = 0.038± 0.002 SNu (3.5)
** compare with snr in literature, and that’s it! :D
44

Chapter 4
Conclusions and Future Work
Difference imaging is a feasible method for finding SNe.
Future work: consider bigger sized apertures.
The assumption of section 3.2.2 is correct as a first approach (that the lc of one sne Ia
is representative of all type Ia SN at that z), but should be refined. The shape of the lc
changes based on the relation between maximum brightness and rate of decline (Hamuy
et al. 1996). The possible range of light curves should be taken into consideration when
calculating a time span of detectability.
45
Chapter 5
References
− Astier, P. et al. 2006, A&A, 447, 31
− Carroll, B. W., & Ostlie D. A. 2007, An Introduction to Modern Astrophysics (2nd
ed.; San Francisco, CA)
− Gilbank, D. G., Gladders, M. D., Yee, H. K. C., & Hsieh, B. C. 2011, AJ, 141, 94
− Hamuy, M. et al. 1996, AJ, 112, 6
− Leibundgut, B. 2008, arXiv:0802.4154
− Van Dokkum, Pieter G. 2001, PASP, 113, 1420
46

47

Chapter 6
Appendix
6.1 Convolving Data with Gaussian Distributions
6.1.1 Convolution Theorem
The convolution theorem states that
F{f ∗ g} = k · F{f} · F{g} (6.1)
where F denotes a fourier transform, and f and g are two functions with convolution
f ∗ g. The fourier transform of the convolution of two functions is then equivalent to the
product of two fourier transforms, one for each function, save a constant k that depends
on the normalization of the fourier transforms.
6.1.2 Fourier Transform of a Gaussian Distribution
Let us first take the exponential function
f(x) = exp(−x2) (6.2)
48

and determine its fourier transform f(ξ). By definition,
f(ξ) =
∫ ∞
−∞f(x) · exp(−ixξ) dx (6.3)
Replacing f(x) and differentiating f(ξ) in respect to ξ, we get
d
dξf(ξ) =
i
2
∫ ∞
−∞
d
dx[exp(−x2)] · exp(−ixξ) dx (6.4)
Through partial integration,
d
dξf(ξ) =
i
2exp(−ixξ) · exp(−x2)
∣∣∣∣∞−∞
− ξ
2
∫ ∞
−∞f(x) · exp(−ixξ) dx (6.5)
As the first expression is equal to zero when evaluating in the given limits and we identify
the second expression as f(ξ),d
dξf(ξ) = −ξ
2f(ξ) (6.6)
Which has as a solution
f(ξ) = c · exp(−ξ2
4
)(6.7)
Where c is the integration constant. We find its value by evaluating f(0), which gives
f(ξ) =√π · exp
(−ξ2
4
)(6.8)
as the fourier transform of the exponential function in (6.2). Therefore, the fourier trans-
form of an exponential function continues being an exponential. Now, as we are interested
in the shape the function takes, and not in the exact value with its constants, let us con-
sider a simple gaussian function with standard deviation σ:
g(x) = exp
(−x2
σ2
)(6.9)
The above procedure can be repeated for equation (6.9), resulting in a fourier transform
g(ξ) = σ√π · exp
(−σ2ξ2
4
)(6.10)
49

6.1.3 Convolving and Deconvolving
As described in section 2.1.4, once the filter image that was taken under better seeing
conditions is identified, we want to convolve it with a gaussian function of standard
deviation σbig and then deconvolve it with a gaussian function with σsmall. Reproducing
equation (2.3), in fourier space:
F(resulting image) = F(original image) · F(gaussian with σbig)
F(gaussian with σsmall)(6.11)
From equation (6.10), we know the fourier transform of a simple gaussian function.
By replacing,
F(resulting image) = F(original image) ·σbig
√π · exp
(−σ2
bigξ2
4
)σsmall
√π · exp
(−σ2
smallξ2
4
) (6.12)
Which is equivalent to
F(resulting image) = F(original image) · σbig
σsmall
· exp(−(σ2
big − σ2small)ξ
2
4
)(6.13)
Let us define
σ∗ =√σ2big − σ2
small (6.14)
Therefore, reconstructing the fourier transform of the exponential,
F(resulting image) = F(original image) · σbig
σsmall
· 1
σ∗√π· F
(exp
(−x2
σ2∗
))(6.15)
By designating the constants k, we finally obtain:
F(resulting image) = F(original image) · k · F(gaussian with σ∗) (6.16)
which is equivalent to equation (2.4). Thus, it is demonstrated that convolving the data
with a gaussian function with standard deviation σbig and then deconvolving it with a
gaussian function with σsmall is equivalent to just convolving the data with a gaussian
function with standard deviation√
σ2big − σ2
small, save from some numerical constants.
50