ssvm07 spatio-temporal scale-spaces
TRANSCRIPT


Motivation
• Allow for differential geometric methods on moving images
• Temporal causality
• Recursive formulation based on current signal and earlier measurement rather than on previous signal
– More realistic from a conceptual view point
– Much more efficient from a computational view point

Earlier Approaches
• Koenderink (88), Florack (97), Salden et al
(98) – Requires convolution with past
signal, non recursive
• Lindeberg (02)
– Recursive, but discrete in the spatio-temporal
dimensions

Current Approach
• ”Standard” axioms + Galelian similarity
• Infinitesimal formulation
• No time causal solution possible
• But scale-space on space and memory
exists

Galilean Similarity
• Spatial and temporal translation, spatial
rotation and spatio-temporal shear
• Allows for measurement of relative motion
µt0
x0
¶=
µ¿ 0
v ¾R
¶µt
x
¶+ a
x; v 2 Rn; t 2 R; R 2 SO(n); ¾; ¿ 2 R+and a 2 Rn+1

Point Measurement
De¯nition © : L1(Rn+1) ! C1(Rn+1), for any u; v 2 L
1(Rn+1) and ®; ¯ 2
R, is a point measurement operator if it ful¯lls:linearity ©(®u+ ¯v) = ®©(u) + ¯©(v)
gray level invariance k©ukL1=kuk
L1
positivity u ¸ 0) ©u ¸ 0point lim
s!0©su = u

G Covariance
De¯nition Given a Lie group g 2 G that acts on the base space as g 7!g ¢ x = T
gx, where T
g: (Rn+1). A family H 3 h 7! ©
hof measurement
operators ful¯lling,
Tg©hTg¡1 =
©g¢h;
is called aG-covariant point measurement space. Where,
G £H 3 (g; h) 7! g ¢ h = ¾(g; h) = ¾g(h)2 H;
is a Lie group action on the set H.

G Scale-Space
De¯nition A G scale-space is a minimal family of G-covariant point measure-
ments that also is a semigroup of operators. I.e. that ful¯lls,
©h1©h2= ©h1
¢h2:

Infinitesimal Criteria
An infinitesimal condition for G scale-
spaces:
• Simplifies derivations as it liniarizes the
problem
• Allows for more general boundary
conditions (which later will be seen to be
necessary)

Infinitesimal Generators
• The infinitesimal object that corresponds
to a Lie group G is a Lie algebra
• The infinitesimal object that corresponds
to a Lie semigroup H is a Lie wedge
• Infinitesimal generatorsA = dT (e) : g! L(§;§), g 3 v 7! A
v = A(v),
B = d©(e) : h! L(§;§), h 3 w 7! Bw = B(w)
LG = g
LH = h
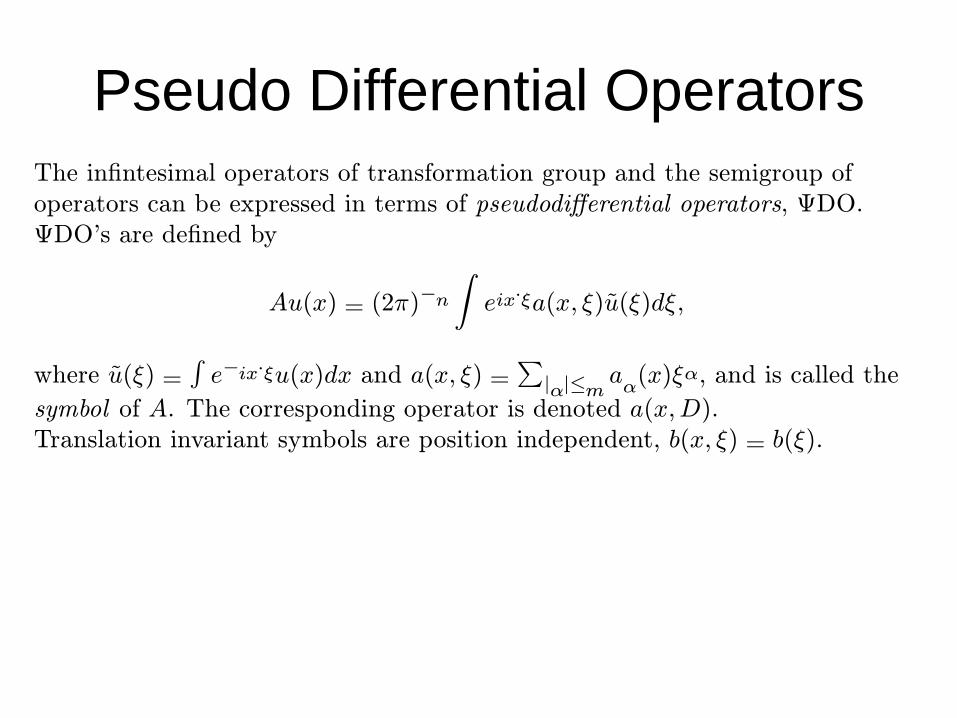
Pseudo Differential Operators
The in¯ntesimal operators of transformation group and the semigroup of
operators can be expressed in terms of pseudodi®erential operators, ªDO.
ªDO's are de¯ned by
Au(x) = (2¼)¡nZeix¢»a(x; »)~u(»)d»;
where ~u(») =Re¡ix¢»u(x)dx and a(x; ») =
Pj®j·m
a®(x)»®, and is called the
symbol of A. The corresponding operator is denoted a(x;D).
Translation invariant symbols are position independent, b(x; ») = b(»).

Infinitesimal Covariance
The in¯nitesinal form of the covariance equation is,
[Av;B
w] = B
C(v;w);
where g£ h 3 (v;w) 7! C(v;w) 2 h is the di®erential of ¾ with respect to botharguments. And an operator B
wfull¯lling such a condition is called a
covariant tensor operator. The operator C is denoted the covariance tensor
and is a Lie algebra representation in the ¯rst argument and a Lie wedge
representation in the second.
Positivity and Gray Level
Invariance
• A positive translation invariant linear
operator semigroup is generated by a
negative definite symbol
• For a gray level invariant semigroup that is
generated by the generators B, the
genrators B are conservative, i.e. B1=0

Infinitesimal G Scale-SpaceDe¯nition A g scale-space wedge, is a minimal Lie wedge of negative de¯nite
conservative operators h 3 w 7! Bw: L(§;§), that is a covariant tensor oper-
ator, with respect of the Lie algebra action g 3 v 7! Av: L(§;§) and the Lie
algebra and Lie wedge representation (v; w) 7! C(v; w).
Theorem A G scale-space is generated by its corresponding g scale-space
wedge, ½@su = Bwu
u(e; x) = f (x);
where f 2 §.

Causal Affine Line
Theorem A gl(1)(=f@
x; x@
x
g) temporally causal scale-space wedge is gener-ated by left sided Riemann Liouville fractional derivatives D®
+with 0 < ® < 1,
where
D®§(») = (¨i»)® = j»j®e¨i(»)®¼=2:

Euclidean Similarity
Theorem A Euclidean similarity es(2) = t(2)[ s(2)[ so(2) scale-space wedge
is generated for any 0 < ® · 2 by the Riesz fractional derivative ¡(¡¢)®=2(»j»j®).
t(2) =f@
1; @2
g is the translation generator, s(2) = fx1@1+ x
2@2
g is thescaling generator and so(2) =
fx2@1
¡ x1@2
g is the rotation generator.

No Time Causal Galilean Similarity
Theorem A °s(2) scale-space wedge is generated by f@20; @0@1; @21
g.
°s(2) = t(2)[ s(1)© s(1) [ °(1);
where °(1) =fx0@1g is the Galilean boost that \skew" space-time and s(1)©s(1)
is a direct sum of the scaling generator in space and time respectively.
Corollary It should be noted that the generated scale-space is symmetric
booth in time and space and thus no time causal scale-spaces are possible with
this axiomatization. And as °s(n); n ¸ 2 have °s(2) as a sub algebra, no timecausal scale-spaces are possible for them either.

What to do?
• A realistic temporal measurement system should not have access to the past signal, only the memory of the past signal
• Let the memory have the same propeties as the past signal, i.e. it should be an affine half space
• Define the time causal Galilean scale-space as a evolution equation on space and memory instead of on space and time
Galilean Similarity
De¯nition Let °s(d + 1) = es(d) © gl(1) [ °(d). The d + 1-dimensional
time causal Galilean scale-space R+
£ Rd £ R+
£ R £ Rd 3 (¾; v; ¿; t; x) 7!u(¾; v; ¿; t; x) 2 R, where ¾ is spatial scale, v is velocity, ¿ is memory (andtemporal scale) is a °s(d+1)-covariant, point measurement space in space-time
(t; x) and a gl(1)-wedge in memory ¿ .

General Evolution EquationTheorem A d+1-dimensional time causal Galilean scale-space (for d= 1;2)
is generated by the evolution equation,
8<:@tu=
¡v ¢rxu+D®0
¿¡u
@¾u=
¡(¡¢x)®=2u
u(0;0;0; t; x) = f(t; x);
where 1<®0· 2, 0<®· 2, ¾ is the spatial scale direction, v 2Rd the velocity
vector, @s = @t + v
¢ rxis the spatio-temporal direction, r
x = (@1; : : : ; @d) is
the spatial gradient and ¢xis the spatial Laplacian.
Heat Equation on Half-Space
Theorem The equation,
8<:@tu=
¡v ¢rxu+@2
¿u
@¾u=¢xu
u(0;0;0; t; x) = f(t; x);
is unique in the family of evolution equations as it is the only one that has local
generators.

Closed Form
u(¾; v; ¿; t; x) = Á(¾; v; ¿; ¢; ¢) ¤ f(t; x);
Á(¾; v; ¿; t; x) =¿ exp(¡ ¿2
4t
¡ (x¡tv)¢(x¡tv)4¾
)p4¼t3=2(4¼¾)d=2

Mixed Derivatives