spanning trees in communication networks rui campos inesc porto, faculdade de engenharia,...
Post on 18-Dec-2015
217 views
TRANSCRIPT

Spanning Trees in Communication
Networks
Rui CamposINESC Porto, Faculdade de Engenharia,
Universidade do [email protected]

Outline
1. Graph Theory
2. Spanning Trees
3. Algorithms
4. Spanning Trees Applications
5. Summary

About me• PhD student at University of Porto
PhD Overview
Auto-configuration and Self-management of Personal Area
Networks
considering:
• intra- and extra-PAN connectivity
• heterogeneity in IP networks
• integration of multiple communication technologies
• Researcher at INESC Porto
Participation in FP6 Ambient Networks Project
• 1st phase - protocol design, specification, and simulation
• 2nd phase – automatic and dynamic IP connectivity
establishment between Ambient Networks

1. Graph Theory
Graph formal definition:
A graph G=(V,E,w) is defined as a set of
vertices V connected by a set of edges
E=[V]2 (i.e., the elements of E are 2-
element subsets of V) with weights w that
represent costs assigned to the edges of G.

1. Graph Theory [example graph]
1
2 3
5
4
6
5
5
10
12
10 3
1
2

1
2 3
5
4
6
5
5
10
12
10 3
1
2
1. Graph Theory [some definitions]
• Number of vertices in G is n = |V|
• Number of edges in G is m = |E|
• Degree of a vertex v is defined as its number of adjacent edges
(an adjacent edge to v is an edge connecting it to a neighbor vertex)
• Path in G is defined as a sequence of connected adjacent vertices
• Cost of path is equal to sum of weights of edges belonging to path
• Cycle in G is defined as a path where first and last vertex in
sequence are the same

1. Graph Theory [graph types]
1
2 3
5
4
6
1
2 3
5
4
6
5
5
10
12
10 3
1
2
undirected undirected weighted

directed directed weighted
1
2 3
5
4
6
1
2 3
5
4
6
1
2
1
3
5
10
2
2
5
3
11 10
2
1. Graph Theory [graph types]

complete graph metric graph
1. Graph Theory [specific types]
1
2 3
4 5
1
2 3
4 5
2
2
2
2
2
2
3
4
all vertices have degree n-
1
edge weights satisfy triangle
inequality

spanning tree
1. Graph Theory [specific types]
1
2
3
4
tree with n-1 edges extracted
from
a graph G with n vertices
treegraph without
cycles
1
2 3
4 5

2. Spanning Trees [cost functions]
• Path cost
e.g., cT(1,3)=5+2=7
• Total cost
Ctotal(T)=5+2+1=8
• Routing Cost
Cr(T)= cT(1,2)+cT(1,3)+cT(1,4)+cT(2,1)+cT(2,3)+cT(2,4)
+ cT(3,1)+cT(3,2)+cT(3,4)+cT(4,1)+cT(4,2)+cT(4,3)=48
1
1
)()(n
eTtotal ewTC
n
i
n
jTr jijicTC
1 1
),,()(
1
3
2
4
5
12
),( vscT

2. Spanning Trees [types]
Shortest Path Tree (SPT)
Minimum Spanning Tree (MST)
Minimum Routing Cost Tree
(MRCT)
path cost
total cost
routing cost

2. Spanning Trees [SPT]
The Shortest Path Tree (SPT) rooted at a
vertex s defines a tree composed by union
of the shortest paths between s and each of
the other vertices in G such that:
)),(min(),( vscvsc GSPT
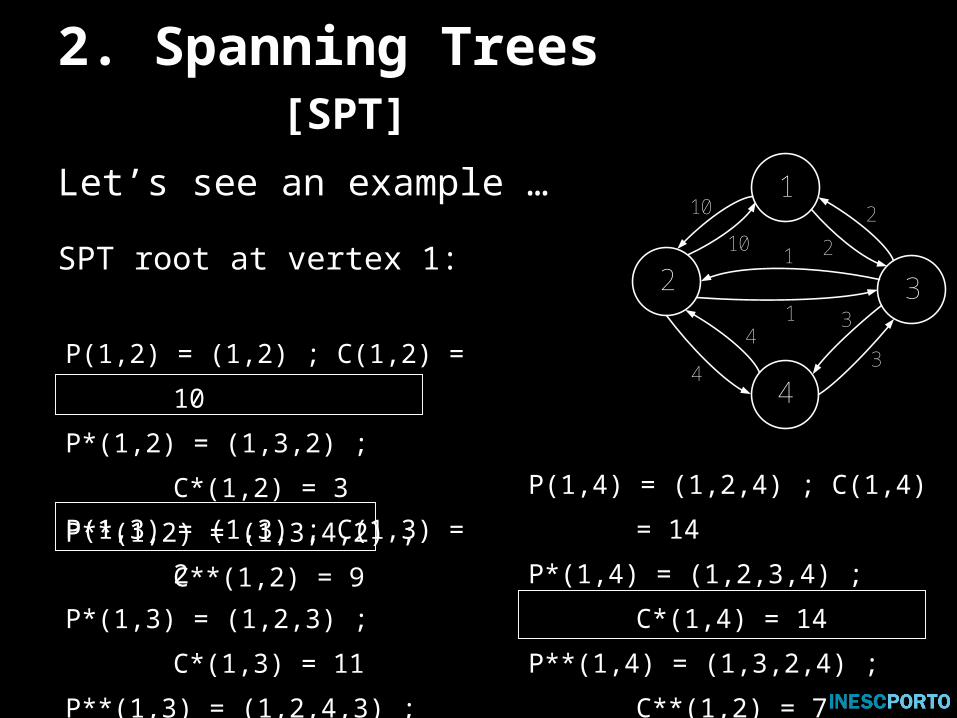
2. Spanning Trees [SPT]
Let’s see an example …
SPT root at vertex 1:
1
2 3
4
10
101
2
2
3
3
14
4
P(1,4) = (1,2,4) ; C(1,4) = 14
P*(1,4) = (1,2,3,4) ; C*(1,4) =
14
P**(1,4) = (1,3,2,4) ; C**(1,2)
= 7
P***(1,4) = (1,3,4) ; C***(1,4)
= 5
P(1,3) = (1,3) ; C(1,3) = 2
P*(1,3) = (1,2,3) ; C*(1,3) =
11
P**(1,3) = (1,2,4,3) ; C**(1,3)
= 17
P(1,2) = (1,2) ; C(1,2) = 10
P*(1,2) = (1,3,2) ; C*(1,2) = 3
P**(1,2) = (1,3,4,2) ; C**(1,2)
= 9

2. Spanning Trees [SPT]
SPT root at vertex 1:
P*(1,2) = (1,3,2)
P(1,3) = (1,3)
P***(1,4) = (1,3,4) 1
2 3
4
1
2
3
1
2 3
4
10
101
2
2
3
3
14
4

2. Spanning Trees [MST]
The Minimum Spanning Tree (MST)
represents the spanning tree T* such that:
for all spanning trees T that can be
computed from G
1
1
)(min*)(n
eTtotal ewTC

2. Spanning Trees [MST]
Let’s see an example ...
STs that can be computed from graph:
1
2 3
4
2
3
4
5
1
2 3
4
2
3
4
1
2 3
4
2 4
5
1
2 3
4
3
4
5
1
2 3
4
2
3 5Ctotal = 3+2+4 = 9
Ctotal = 2+4+5 = 11
Ctotal = 3+5+4 = 12
Ctotal = 2+3+5 = 11

2. Spanning Trees [MRCT]
The Minimum Routing Cost Tree (MRCT)
represents the spanning tree T* such that:
for all spanning trees T that can be
computed from G
n
i
n
jTr jijicTC
1 1
),,(min*)(
Note: computation of exact MRCT is a NP-hard problem

2. Spanning Trees [MRCT]
Let’s see an example …
STs that can be computed from graph:
1
2 3
4
2
3
4
5
1
2 3
4
2
3
4
1
2 3
4
2 4
5
1
2 3
4
3
4
5
1
2 3
4
2
3 5Cr = 2+4+5+2+6+3
+4+6+9+5+3+9=58
Cr = 2+4+9+2+6+11
+4+6+5+9+11+5=74
Cr = 12+4+9+12+8+3
+4+8+5+9+3+5=82
Cr = 2+10+5+2+8+3
+10+8+5+5+3+5=66
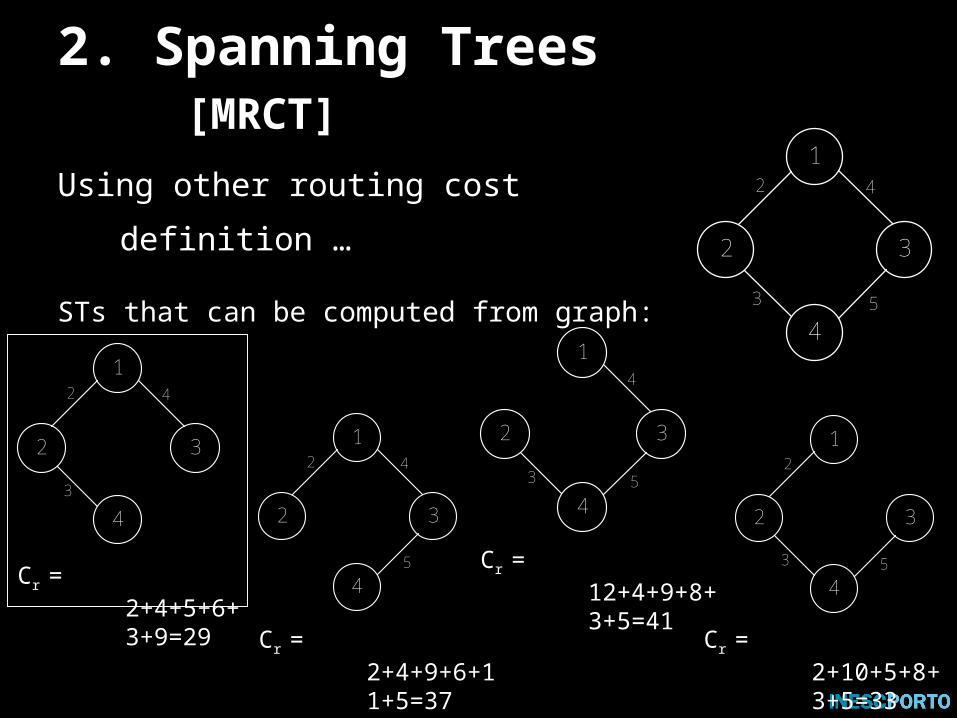
2. Spanning Trees [MRCT]
Using other routing cost definition …
STs that can be computed from graph:
1
2 3
4
2
3
4
5
1
2 3
4
2
3
4
1
2 3
4
2 4
5
1
2 3
4
3
4
5
1
2 3
4
2
3 5Cr =
2+4+5+6+3+9=29 Cr =
2+4+9+6+11+5=37
Cr = 12+4+9+8+3+5=41
Cr = 2+10+5+8+3+5=33
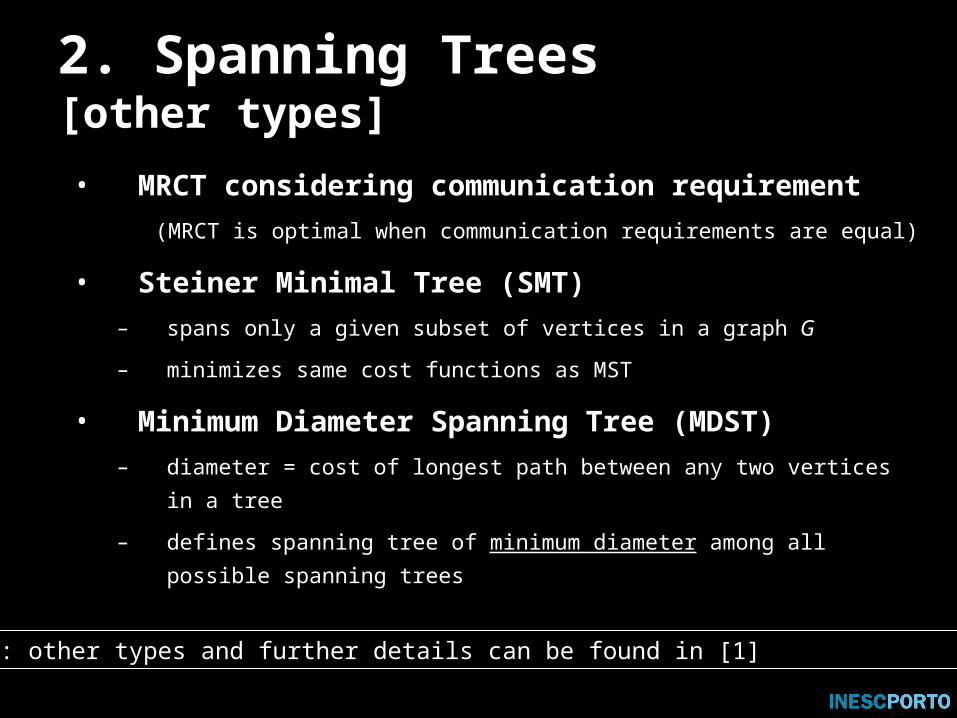
2. Spanning Trees [other types]
• MRCT considering communication requirement
(MRCT is optimal when communication requirements are equal)
• Steiner Minimal Tree (SMT)
– spans only a given subset of vertices in a graph G
– minimizes same cost functions as MST
• Minimum Diameter Spanning Tree (MDST)
– diameter = cost of longest path between any two vertices in a tree
– defines spanning tree of minimum diameter among all possible
spanning trees
Note: other types and further details can be found in [1]

2. Spanning Trees [2 interesting cases]
• When edge weights of G are highly heterogeneous
MST = MRCT = SPT (*)
• When there is a single source s
MRCT = SPTs
(*) P. Mieghem, S. Langen, Influence of the link weight structure on the shortest path, Physical Review E 71 (2005) 056113-1–056113-13.
P. Mieghem, S. M. Magdalena, Phase transition in the link weight structure of networks, Physical Review E 72 (2005) 056138-2–056138-7.

2. Spanning Trees [MST=MRCT=SPT]
Let’s see an example ...
STs that can be computed from graph:
1
2 3
4
1
10
10
1
1
1
2 3
4
1
10
101
2 3
4
1
10 1
1
2 3
4
1 10
1
1
2 3
410
10
1
1
2 3
4
1
10
1
1
2 3
4
10
1
1
1
2 3
4
1
1
1
1
2 3
410
10
1
Cr=64; Ctotal=21
Cr=46; Ctotal=21
Cr=46; Ctotal=21
Cr=64; Ctotal =21
Cr=36; Ctotal =12
Cr=36; Ctotal =12
Cr=10; Ctotal =3 Cr=64; Ctotal =21SPT

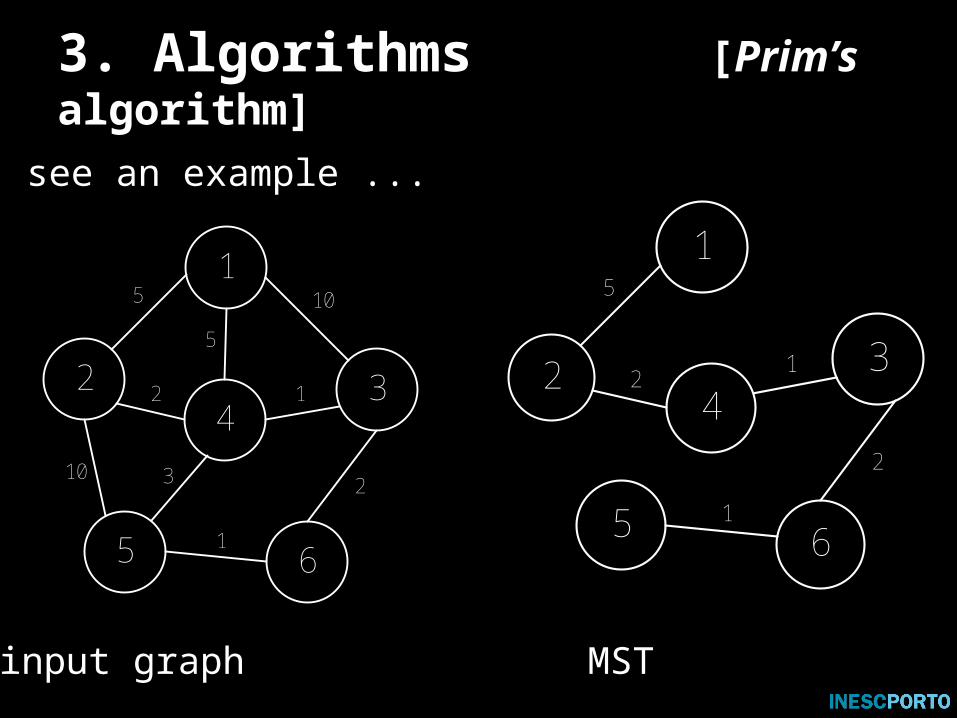
3. Algorithms [Prim’s algorithm]
• Algorithm to compute MST for a graph G
• Proposed by Robert Prim in 1957
• Time complexity
O(n.m)
– in its more naive implementation
O(m.log(n))
– using binary heaps in conjunction with adjacency lists
O(m+n.log(n))
– using Fibonacci heaps in conjunction with adjacency
lists

Algorithm: PRIM
Input: A weighted, undirected graph G=(V,E,w)
Output: A minimum spanning tree T
T ← 0
Let uV be an arbitrary vertex
U ← {u}
while |U| < n do
find uU and v(V - U) such that edge (u,v) is the smallest edge between U and V –
U and does not form a cycle
T ← T {(u,v)}
U ← U {v}

3. Algorithms [Prim’s algorithm]
Steps in a nutshell:(T ← 0)
1. Pick up arbitrary vertex v
2. Select edge (i,j) adjacent to v with lowest weight and add it
to T
3. Select adjacent edge (i,j) to T with lowest weight that does
not form a cycle and add it to T
4. Repeat step 3 until all vertices have been spanned
1
2 3
5
4
6
5
5
10
12
10 3
1
2
31
3. Algorithms [Prim’s algorithm]
1
2 3
5
4
6
5
5
10
12
10 3
1
2
1
input graph MST
Let’s see an example ...
2
5
42
6
2
5 1

31
5 1
1
5
3. Algorithms [Prim’s algorithm]
1
2 3
5
4
6
5
5
10
12
10 3
1
2
4
input graph MST
Other possible result ...
2 2
6
2

3. Algorithms [Kruskal’s algorithm]
• Algorithm to compute MST for a graph G
• Proposed by Joseph Kruskal in 1956
• Time complexity
• O(m.log(m))
– using priority queues

Algorithm: KRUSKAL
Input: A weighted, undirected graph G=(V,E,w)
Output: A minimum spanning tree T
Sort edges in E in nondecreasing order by weight
T ← 0
Create one set for each vertex
for each edge (u,v) in sorted order do
if FIND_SET(u) FIND_SET(v) then T ← T {(u,v)} UNION(u,v)
MAKE_SET(v) create a new set whose only member is v
FIND_SET(v) returns a pointer to set containing v
UNION(u,v) unites dynamic sets that contain u and
v into new set that is union of these
two sets
Legend

3. Algorithms [Kruskal’s algorithm]
Steps in a nutshell:(T ← 0)
1. Pick up edge (i,j) with lowest weight that does not belong
to T and does not form a cycle
2. Add edge (i,j) to T
3. Repeat step 1 and 2 until all vertices have been spanned
1
2 3
5
4
6
5
5
10
12
10 3
1
2

3. Algorithms [Kruskal’s algorithm]
1
2 3
5
4
6
5
5
10
12
10 3
1
2
5 61
34
1
input graph MST
Let’s see an example ...
2
2 2
15
3. Algorithms [Dijkstra’s algorithm]
• Algorithm to compute SPT for a graph G
• Proposed by Edsger Dijkstra in 1959
• Time complexity
• O(n2)
– in its more naive implementation
• O(m.log(n))
– using binary heaps
• O(m+nlog(n))
– using Fibonacci heaps

Algorithm: DIJKSTRA
Input: A weighted, directed graph G=(V,E,w);
a source vertex s.
Output: A shortest path tree T rooted at s
for each vV do
δv ← ; pv ← NIL
δs ← 0; T ← 0; S ← V
while S 0 do
choose uS with min(δu)
S ← S – {u}
if u s then T ← T {(pu,u)}
for each vertex v adjacent to u do
if (δv δu + w(u,v)) then
δv ← δu + w(u,v)
pv ← u

3. Algorithms [Dijkstra’s algorithm]
Steps in a nutshell:
(T ← 0; δv ← ; δs ← 0)
1. Select vertex v with min shortest path estimate and add edge
(pv,v) to T
2. Re-evaluate shortest path estimates of vertices adjacent to v and
update them and parent vertex in T if lower estimates are
obtained
3. Repeat steps 1 and 2 until all vertices have been spanned
1
2 3
5
4
6
1
2
1
3
5
10
2
2
5
3
11 10
2

3. Algorithms [Dijkstra’s algorithm]
input graph
Let’s see an example ...
1
2 3
5
4
6
1
2
1
3
5
10
2
2
5
3
11 10
2
1
2
1
5
3 4
26
1
33
SPT rooted@vertex 1
v δ
v
2 1
3 1
0
v δ
v
3 1
0
5 4v δ
v
3 1
0
4 6
v δ
v
3 9
6 7
v δ
v
3 9

3. Algorithms [Bellman-Ford algorithm]
• Algorithm to compute SPT for a graph G
• Proposed by Richard Bellman in 1958
• Works in more general cases• finds SPT even when graph has negative weights
• Time complexity• O(n.m)
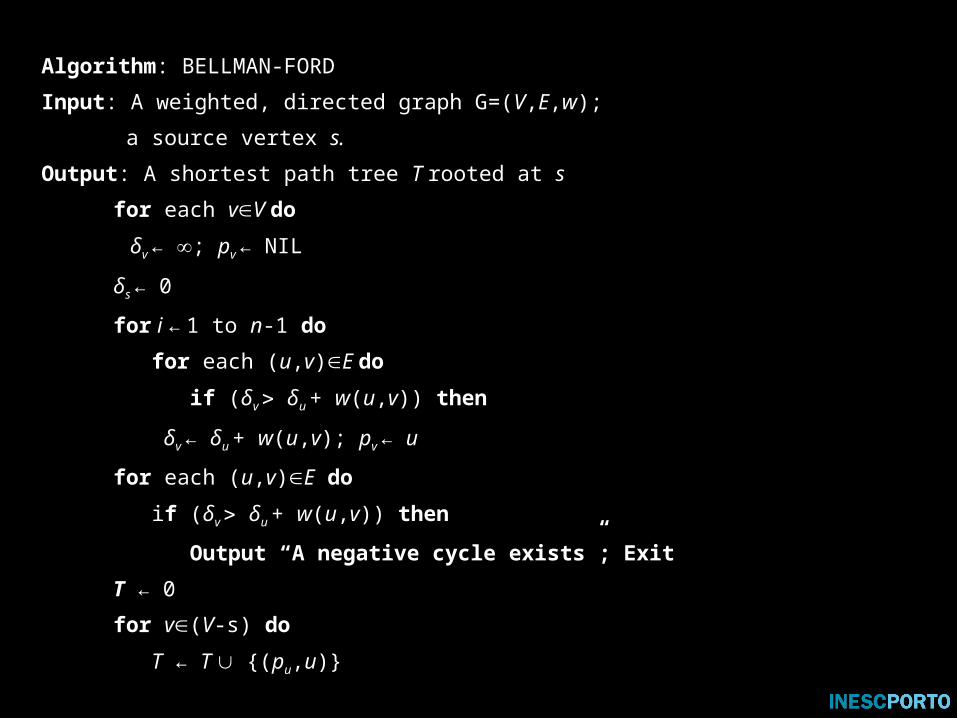
Algorithm: BELLMAN-FORD
Input: A weighted, directed graph G=(V,E,w);
a source vertex s.
Output: A shortest path tree T rooted at s
for each vV do
δv ← ; pv ← NIL
δs ← 0
for i ← 1 to n-1 do
for each (u,v)E do
if (δv δu + w(u,v)) then
δv ← δu + w(u,v); pv ← u
for each (u,v)E do
if (δv δu + w(u,v)) then
Output “A negative cycle exists”; Exit
T ← 0
for v(V-s) do
T ← T {(pu,u)}

3. Algorithms [Bellman-Ford algorithm]
Steps in a nutshell:(T ← 0; δv ← ; δs ← 0)
1. For each edge (u,v) re-evaluate shortest path
estimate δv and update it and pv if (δu + w(u,v) δv)
2. Repeat step 1 (n-1) times
3. The union of edges (pv,v) gives shortest path tree T
1
2 3
5
4
6
1
2
1
3
5
10
2
2
5
3
11 10
2
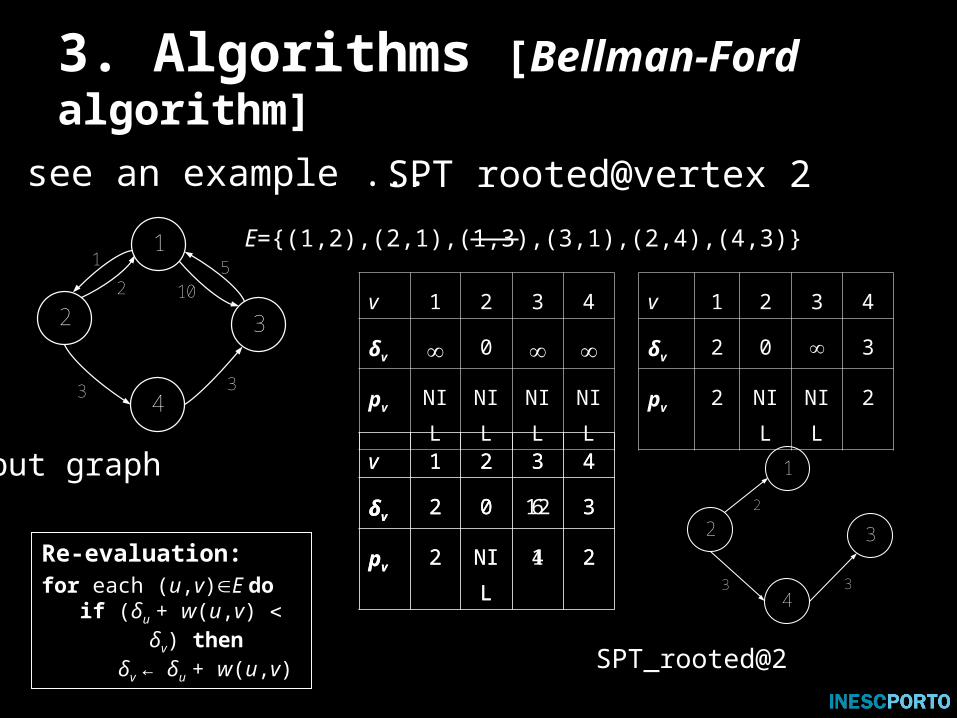
3. Algorithms [Bellman-Ford algorithm]
1
2 3
4
1
2
3
510
3
1
2 3
4
2
3 3
input graph
Let’s see an example ... SPT rooted@vertex 2
v 1 2 3 4
δv 0
pv NI
L
NI
L
NI
L
NI
L
v 1 2 3 4
δv 2 0 3
pv 2 NI
L
NI
L
2
E={(1,2),(2,1),(1,3),(3,1),(2,4),(4,3)}
v 1 2 3 4
δv 2 0 12 3
pv 2 NI
L
1 2Re-evaluation:for each (u,v)E do if (δu + w(u,v) δv)
then δv ← δu + w(u,v) SPT_rooted@2
v 1 2 3 4
δv 2 0 6 3
pv 2 NI
L
4 2

3. Algorithms [Add algorithm]
• Algorithm for finding approximate MRCT for a
graph G
• Proposed by Vic Grout in 2005
• Vertex oriented version of Prim’s algorithm• minimizes number of relay nodes in final spanning tree
• Time complexity• O(n.log(n)) time in the worst case
– usually, faster due to tendency for many nodes to be added to
T at each step

Algorithm: ADD
Input: undirected graph G=(V,E)
Output: approximate minimum routing cost tree T
T ← 0
for all v V
sv ← 0
for all u,v V
wuv ← 0
find u such that
du ← max(dv), v V
su ← 1
while there exists j such that sj = 0 do
for each v V adjacent to u do
wuv ← 1; sv ← 1; T ← T {(pu,u)}
find u such that (du − δu)← max(dj − δj) where sj = 1
Legend:sv=1 vTwuv – weight of edge (u,v)du – degree of vertex uδu – degree of vertex u in T

3. Algorithms [Add algorithm]
Steps in a nutshell:1. Pick up vertex v adjacent to maximum number of
unspanned vertices
2. Add to T all edges adjacent to v that do not form a cycle
3. Repeat steps 1 and 2 until all vertices are added to T
1
2 3
5
4
6

2
5
3. Algorithms [Add algorithm]
1
23
5
4
67
8
input graph approximate MRCT
Let’s see an example ...
1
4
67
8
3

3. Algorithms [Wong’s algorithm]
• Proposed by Richard Wong in 1980
• 2-approximate MRCT algorithm
• Based on Dijkstra’s algorithm
• Time complexity• O(n2.log(n)+m.n)

3. Algorithms [Wong’s algorithm]
Steps:
1. Compute n SPTs using Dijkstra’s
algorithm
2. Compute routing cost for each SPT
3. Select SPT with lowest routing cost
2-approximate MRCT

5
8
34
3. Algorithms [Wong’s algorithm]
1
23
5
4
67
8
1
Let’s see an example ...
2
67
1
23
5
4
67
8
1
23
5
4
67
8
1
23
5
4
67
8
1
23
5
4
67
8
1
23
5
4
67
8
1
23
5
4
67
8
1
23
5
4
67
8
SPT_rooted@1
SPT_rooted@2
SPT_rooted@3
SPT_rooted@4
SPT_rooted@5
SPT_rooted@6
SPT_rooted@7
SPT_rooted@8

3. Algorithms [Wong’s algorithm]
1
23
5
4
67
8Let’s see an example ...
SPT root Routing
Cost
1 124
2 136
3 118
4 122
5 144
6 126
7 134
8 142
1
23
5
4
67
8
approximate MRCT

4. Spanning Trees Applications
Minimum Spanning Tree (MST)
cable TV network
• cost-efficient connection of several end clients to
infrastructure
islands connection
• cost-efficient connection of islands using bridges
travelling salesman problem
• NP-hard problem
• MST can be used to find 2-approximate solution

4. Spanning Trees ApplicationsShortest Path Tree (SPT)
routing protocols
• Routing Information Protocol (RIP)
• Open Shortest Path First (OSPF)
• Ad-hoc On-demand Distance Vector (AODV)
• Optimized Link State Routing (OLSR)
multicast routing
• minimization of path cost between source and destinations
road network
• find shortest path between a city and other cities in a
country

4. Spanning Trees Applications
Minimum Routing Cost Tree (MRCT)
Ethernet networks
• minimization of routing cost between
bridges/switches
road network
• connection of cities in a country with minimum
distance between cities

5. Summary
• Different types of graphs defined
• undirected, undirected weight, directed, directed weighted
• Specific graph types
• complete graph, metric graph, tree, spanning tree
• Different types of spanning trees
• Shortest Path Tree (SPT)
• Minimum Spanning Tree (MST)
• Minimum Routing Cost Tree (MRCT)
↓
their computation by exhaustive search is impratical

5. Summary
• Spanning tree algorithms
• Enable efficient computation of spanning trees
• Spanning trees have several applications
Spanning
Tree
Algorithm
MST • Prim
• Kruskal
SPT • Dijkstra
• Bellman-Ford
MRCT • Add
• Wong

References
[1] B. Wu and K. Chao, Spanning Trees and
Optimization Problems, Chapman & Hall, 2004.
[2] R. Diestel, Graph Theory, Springer-Verlag
Heidelberg, New York, Electronic Edition 2005.
[3] V. Grout, Principles of Cost Minimization in
Wireless Networks, J. of Heuristics 11 (2005)
115-133.

Contact
Rui Campos
(+351) 222 094 268
http://telecom.inescporto.pt/~rcampos