sp2004f lecture07-01 digital signal...
TRANSCRIPT

Digital Signal Processing
References1 A V Oppenheim and R W Schafer Discrete-time Signal Processing 19992 X Huang et al Spoken Language Processing Chapters 5 63 J R Deller et al Discrete-Time Processing of Speech Signals Chapters 4-64 J W Picone ldquoSignal modeling techniques in speech recognitionrdquo proceedings of the IEEE
September 1993 pp 1215-1247
Berlin Chen 2004
2004 SP- Berlin Chen 2
Digital Signal Processing
bull Digital Signalndash Discrete-time signal with discrete amplitude
bull Digital Signal Processingndash Manipulate digital signals in a digital computer
[ ]nx
2004 SP- Berlin Chen 3
Two Main Approaches to Digital Signal Processing
bull Filtering
bull Parameter Extraction
FilterSignal in Signal out
[ ] nx [ ] ny
ParameterExtraction
Signal in Parameter out
[ ] nx
1
12
11
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
mc
cc
2
22
21
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
mc
cc
2
1
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
Lm
L
L
c
cc
eg1 Spectrum Estimation2 Parameters for Recognition
Amplify or attenuate some frequencycomponents of [ ] nx
2004 SP- Berlin Chen 4
Sinusoid Signals
ndash amplitude (振幅)ndash angular frequency (角頻率) ndash phase (相角)
bull Eg speech signals can be decomposed as sums of sinusoids
[ ] ( )φω += nAnx cos
ωφ
A
Tf ππω 22 ==
[ ] ⎟⎠⎞
⎜⎝⎛ minus=
2cos πωnAnx
samples 25=T
10frequency normalized
lele ff
Period represented by number of samples
[ ] [ ]
( )2122
2)(cos
==rArr=rArr
⎟⎠⎞
⎜⎝⎛ minus+=+=
kN
kkN
NnANnxnx
πωπω
πω
2004 SP- Berlin Chen 5
Sinusoid Signals (cont)
bull is periodic with a period of N (samples)
bull Examples (sinusoid signals)
ndash is periodic with period N=8ndash is periodic with period N=16ndash is not periodic
[ ]nx[ ] [ ]nxNnx =+
( ) ( )φωφω +=++ nANnA cos)(cos)21( 2 kkN == πω
Nπω 2
=
[ ] ( )4cos1 nnx π=[ ] ( )83cos2 nnx π=
[ ] ( )nnx cos3 =
2004 SP- Berlin Chen 6
Sinusoid Signals (cont)[ ] ( )
( )
8
integers positive are and 824
44cos)(
4cos
4cos
4cos
1
11
11
1
=there4
sdotrArrsdot=rArr
⎟⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛=
=
N
kNkkN
NnNnn
nnx
ππ
πππππ
[ ] ( )
( )
( )
16
numbers positive are and 3
1628
3
83
83cos
83cos
83cos
83cos
2
222
22
2
=there4
=rArrsdot=sdotrArr
⎟⎠⎞
⎜⎝⎛ sdot+sdot=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ sdot=
=
N
kNkNkN
NnNnn
nnx
ππ
πππππ
[ ] ( )( ) ( )( ) ( )
exist t doesn integers positive are and
2 cos1cos1cos
cos
3
3
3
33
3
NkN
kNNnNnn
nnx
there4
sdot=rArr+=+sdot=sdot=
=
Q
π
2004 SP- Berlin Chen 7
Sinusoid Signals (cont)
bull Complex Exponential Signalndash Use Eulerrsquos relation to express complex numbers
( )φφφ sincos
jAAez
jyxzj +==rArr
+=
( )number real a is A
Re
Im
φφ
sin cos
AyAx
==
22 yx + 22 yx
x
+22 yx
y
+
Imaginary part
real part
2004 SP- Berlin Chen 8
Sinusoid Signals (cont)
bull A Sinusoid Signal
[ ] ( )( )
φω
φω
φω
jnj
nj
eAeAe
nAnx
Re Re
cos
=
=
+=+
real part
2004 SP- Berlin Chen 9
Sinusoid Signals (cont)
bull Sum of two complex exponential signals with same frequency
ndash When only the real part is considered
ndash The sum of N sinusoids of the same frequency is another sinusoid of the same frequency
( ) ( )
( )
( )φω
φω
φφω
φωφω
+
++
=
=
+=
+
nj
jnj
jjnj
njnj
Ae
Aee
eAeAe
eAeA10
10
10
10
( ) ( ) ( )φωφωφω +=+++ nAnAnA coscoscos 1100
numbers real are and 10 AAA
2004 SP- Berlin Chen 10
Sinusoid Signals (cont)
bull Trigonometric Identities
1100
1100coscossinsintan
φφφφ
φAAAA
++
=
( ) ( )( )
( )10102
120
1010102
120
2
21100
21100
2
cos2
sinsincoscos2
sinsincoscos
φφ
φφφφ
φφφφ
minus++=
+++=
+++=
AAAA
AAAAA
AAAAA
2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 2
Digital Signal Processing
bull Digital Signalndash Discrete-time signal with discrete amplitude
bull Digital Signal Processingndash Manipulate digital signals in a digital computer
[ ]nx
2004 SP- Berlin Chen 3
Two Main Approaches to Digital Signal Processing
bull Filtering
bull Parameter Extraction
FilterSignal in Signal out
[ ] nx [ ] ny
ParameterExtraction
Signal in Parameter out
[ ] nx
1
12
11
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
mc
cc
2
22
21
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
mc
cc
2
1
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
Lm
L
L
c
cc
eg1 Spectrum Estimation2 Parameters for Recognition
Amplify or attenuate some frequencycomponents of [ ] nx
2004 SP- Berlin Chen 4
Sinusoid Signals
ndash amplitude (振幅)ndash angular frequency (角頻率) ndash phase (相角)
bull Eg speech signals can be decomposed as sums of sinusoids
[ ] ( )φω += nAnx cos
ωφ
A
Tf ππω 22 ==
[ ] ⎟⎠⎞
⎜⎝⎛ minus=
2cos πωnAnx
samples 25=T
10frequency normalized
lele ff
Period represented by number of samples
[ ] [ ]
( )2122
2)(cos
==rArr=rArr
⎟⎠⎞
⎜⎝⎛ minus+=+=
kN
kkN
NnANnxnx
πωπω
πω
2004 SP- Berlin Chen 5
Sinusoid Signals (cont)
bull is periodic with a period of N (samples)
bull Examples (sinusoid signals)
ndash is periodic with period N=8ndash is periodic with period N=16ndash is not periodic
[ ]nx[ ] [ ]nxNnx =+
( ) ( )φωφω +=++ nANnA cos)(cos)21( 2 kkN == πω
Nπω 2
=
[ ] ( )4cos1 nnx π=[ ] ( )83cos2 nnx π=
[ ] ( )nnx cos3 =
2004 SP- Berlin Chen 6
Sinusoid Signals (cont)[ ] ( )
( )
8
integers positive are and 824
44cos)(
4cos
4cos
4cos
1
11
11
1
=there4
sdotrArrsdot=rArr
⎟⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛=
=
N
kNkkN
NnNnn
nnx
ππ
πππππ
[ ] ( )
( )
( )
16
numbers positive are and 3
1628
3
83
83cos
83cos
83cos
83cos
2
222
22
2
=there4
=rArrsdot=sdotrArr
⎟⎠⎞
⎜⎝⎛ sdot+sdot=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ sdot=
=
N
kNkNkN
NnNnn
nnx
ππ
πππππ
[ ] ( )( ) ( )( ) ( )
exist t doesn integers positive are and
2 cos1cos1cos
cos
3
3
3
33
3
NkN
kNNnNnn
nnx
there4
sdot=rArr+=+sdot=sdot=
=
Q
π
2004 SP- Berlin Chen 7
Sinusoid Signals (cont)
bull Complex Exponential Signalndash Use Eulerrsquos relation to express complex numbers
( )φφφ sincos
jAAez
jyxzj +==rArr
+=
( )number real a is A
Re
Im
φφ
sin cos
AyAx
==
22 yx + 22 yx
x
+22 yx
y
+
Imaginary part
real part
2004 SP- Berlin Chen 8
Sinusoid Signals (cont)
bull A Sinusoid Signal
[ ] ( )( )
φω
φω
φω
jnj
nj
eAeAe
nAnx
Re Re
cos
=
=
+=+
real part
2004 SP- Berlin Chen 9
Sinusoid Signals (cont)
bull Sum of two complex exponential signals with same frequency
ndash When only the real part is considered
ndash The sum of N sinusoids of the same frequency is another sinusoid of the same frequency
( ) ( )
( )
( )φω
φω
φφω
φωφω
+
++
=
=
+=
+
nj
jnj
jjnj
njnj
Ae
Aee
eAeAe
eAeA10
10
10
10
( ) ( ) ( )φωφωφω +=+++ nAnAnA coscoscos 1100
numbers real are and 10 AAA
2004 SP- Berlin Chen 10
Sinusoid Signals (cont)
bull Trigonometric Identities
1100
1100coscossinsintan
φφφφ
φAAAA
++
=
( ) ( )( )
( )10102
120
1010102
120
2
21100
21100
2
cos2
sinsincoscos2
sinsincoscos
φφ
φφφφ
φφφφ
minus++=
+++=
+++=
AAAA
AAAAA
AAAAA
2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 3
Two Main Approaches to Digital Signal Processing
bull Filtering
bull Parameter Extraction
FilterSignal in Signal out
[ ] nx [ ] ny
ParameterExtraction
Signal in Parameter out
[ ] nx
1
12
11
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
mc
cc
2
22
21
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
mc
cc
2
1
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
Lm
L
L
c
cc
eg1 Spectrum Estimation2 Parameters for Recognition
Amplify or attenuate some frequencycomponents of [ ] nx
2004 SP- Berlin Chen 4
Sinusoid Signals
ndash amplitude (振幅)ndash angular frequency (角頻率) ndash phase (相角)
bull Eg speech signals can be decomposed as sums of sinusoids
[ ] ( )φω += nAnx cos
ωφ
A
Tf ππω 22 ==
[ ] ⎟⎠⎞
⎜⎝⎛ minus=
2cos πωnAnx
samples 25=T
10frequency normalized
lele ff
Period represented by number of samples
[ ] [ ]
( )2122
2)(cos
==rArr=rArr
⎟⎠⎞
⎜⎝⎛ minus+=+=
kN
kkN
NnANnxnx
πωπω
πω
2004 SP- Berlin Chen 5
Sinusoid Signals (cont)
bull is periodic with a period of N (samples)
bull Examples (sinusoid signals)
ndash is periodic with period N=8ndash is periodic with period N=16ndash is not periodic
[ ]nx[ ] [ ]nxNnx =+
( ) ( )φωφω +=++ nANnA cos)(cos)21( 2 kkN == πω
Nπω 2
=
[ ] ( )4cos1 nnx π=[ ] ( )83cos2 nnx π=
[ ] ( )nnx cos3 =
2004 SP- Berlin Chen 6
Sinusoid Signals (cont)[ ] ( )
( )
8
integers positive are and 824
44cos)(
4cos
4cos
4cos
1
11
11
1
=there4
sdotrArrsdot=rArr
⎟⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛=
=
N
kNkkN
NnNnn
nnx
ππ
πππππ
[ ] ( )
( )
( )
16
numbers positive are and 3
1628
3
83
83cos
83cos
83cos
83cos
2
222
22
2
=there4
=rArrsdot=sdotrArr
⎟⎠⎞
⎜⎝⎛ sdot+sdot=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ sdot=
=
N
kNkNkN
NnNnn
nnx
ππ
πππππ
[ ] ( )( ) ( )( ) ( )
exist t doesn integers positive are and
2 cos1cos1cos
cos
3
3
3
33
3
NkN
kNNnNnn
nnx
there4
sdot=rArr+=+sdot=sdot=
=
Q
π
2004 SP- Berlin Chen 7
Sinusoid Signals (cont)
bull Complex Exponential Signalndash Use Eulerrsquos relation to express complex numbers
( )φφφ sincos
jAAez
jyxzj +==rArr
+=
( )number real a is A
Re
Im
φφ
sin cos
AyAx
==
22 yx + 22 yx
x
+22 yx
y
+
Imaginary part
real part
2004 SP- Berlin Chen 8
Sinusoid Signals (cont)
bull A Sinusoid Signal
[ ] ( )( )
φω
φω
φω
jnj
nj
eAeAe
nAnx
Re Re
cos
=
=
+=+
real part
2004 SP- Berlin Chen 9
Sinusoid Signals (cont)
bull Sum of two complex exponential signals with same frequency
ndash When only the real part is considered
ndash The sum of N sinusoids of the same frequency is another sinusoid of the same frequency
( ) ( )
( )
( )φω
φω
φφω
φωφω
+
++
=
=
+=
+
nj
jnj
jjnj
njnj
Ae
Aee
eAeAe
eAeA10
10
10
10
( ) ( ) ( )φωφωφω +=+++ nAnAnA coscoscos 1100
numbers real are and 10 AAA
2004 SP- Berlin Chen 10
Sinusoid Signals (cont)
bull Trigonometric Identities
1100
1100coscossinsintan
φφφφ
φAAAA
++
=
( ) ( )( )
( )10102
120
1010102
120
2
21100
21100
2
cos2
sinsincoscos2
sinsincoscos
φφ
φφφφ
φφφφ
minus++=
+++=
+++=
AAAA
AAAAA
AAAAA
2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 4
Sinusoid Signals
ndash amplitude (振幅)ndash angular frequency (角頻率) ndash phase (相角)
bull Eg speech signals can be decomposed as sums of sinusoids
[ ] ( )φω += nAnx cos
ωφ
A
Tf ππω 22 ==
[ ] ⎟⎠⎞
⎜⎝⎛ minus=
2cos πωnAnx
samples 25=T
10frequency normalized
lele ff
Period represented by number of samples
[ ] [ ]
( )2122
2)(cos
==rArr=rArr
⎟⎠⎞
⎜⎝⎛ minus+=+=
kN
kkN
NnANnxnx
πωπω
πω
2004 SP- Berlin Chen 5
Sinusoid Signals (cont)
bull is periodic with a period of N (samples)
bull Examples (sinusoid signals)
ndash is periodic with period N=8ndash is periodic with period N=16ndash is not periodic
[ ]nx[ ] [ ]nxNnx =+
( ) ( )φωφω +=++ nANnA cos)(cos)21( 2 kkN == πω
Nπω 2
=
[ ] ( )4cos1 nnx π=[ ] ( )83cos2 nnx π=
[ ] ( )nnx cos3 =
2004 SP- Berlin Chen 6
Sinusoid Signals (cont)[ ] ( )
( )
8
integers positive are and 824
44cos)(
4cos
4cos
4cos
1
11
11
1
=there4
sdotrArrsdot=rArr
⎟⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛=
=
N
kNkkN
NnNnn
nnx
ππ
πππππ
[ ] ( )
( )
( )
16
numbers positive are and 3
1628
3
83
83cos
83cos
83cos
83cos
2
222
22
2
=there4
=rArrsdot=sdotrArr
⎟⎠⎞
⎜⎝⎛ sdot+sdot=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ sdot=
=
N
kNkNkN
NnNnn
nnx
ππ
πππππ
[ ] ( )( ) ( )( ) ( )
exist t doesn integers positive are and
2 cos1cos1cos
cos
3
3
3
33
3
NkN
kNNnNnn
nnx
there4
sdot=rArr+=+sdot=sdot=
=
Q
π
2004 SP- Berlin Chen 7
Sinusoid Signals (cont)
bull Complex Exponential Signalndash Use Eulerrsquos relation to express complex numbers
( )φφφ sincos
jAAez
jyxzj +==rArr
+=
( )number real a is A
Re
Im
φφ
sin cos
AyAx
==
22 yx + 22 yx
x
+22 yx
y
+
Imaginary part
real part
2004 SP- Berlin Chen 8
Sinusoid Signals (cont)
bull A Sinusoid Signal
[ ] ( )( )
φω
φω
φω
jnj
nj
eAeAe
nAnx
Re Re
cos
=
=
+=+
real part
2004 SP- Berlin Chen 9
Sinusoid Signals (cont)
bull Sum of two complex exponential signals with same frequency
ndash When only the real part is considered
ndash The sum of N sinusoids of the same frequency is another sinusoid of the same frequency
( ) ( )
( )
( )φω
φω
φφω
φωφω
+
++
=
=
+=
+
nj
jnj
jjnj
njnj
Ae
Aee
eAeAe
eAeA10
10
10
10
( ) ( ) ( )φωφωφω +=+++ nAnAnA coscoscos 1100
numbers real are and 10 AAA
2004 SP- Berlin Chen 10
Sinusoid Signals (cont)
bull Trigonometric Identities
1100
1100coscossinsintan
φφφφ
φAAAA
++
=
( ) ( )( )
( )10102
120
1010102
120
2
21100
21100
2
cos2
sinsincoscos2
sinsincoscos
φφ
φφφφ
φφφφ
minus++=
+++=
+++=
AAAA
AAAAA
AAAAA
2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 5
Sinusoid Signals (cont)
bull is periodic with a period of N (samples)
bull Examples (sinusoid signals)
ndash is periodic with period N=8ndash is periodic with period N=16ndash is not periodic
[ ]nx[ ] [ ]nxNnx =+
( ) ( )φωφω +=++ nANnA cos)(cos)21( 2 kkN == πω
Nπω 2
=
[ ] ( )4cos1 nnx π=[ ] ( )83cos2 nnx π=
[ ] ( )nnx cos3 =
2004 SP- Berlin Chen 6
Sinusoid Signals (cont)[ ] ( )
( )
8
integers positive are and 824
44cos)(
4cos
4cos
4cos
1
11
11
1
=there4
sdotrArrsdot=rArr
⎟⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛=
=
N
kNkkN
NnNnn
nnx
ππ
πππππ
[ ] ( )
( )
( )
16
numbers positive are and 3
1628
3
83
83cos
83cos
83cos
83cos
2
222
22
2
=there4
=rArrsdot=sdotrArr
⎟⎠⎞
⎜⎝⎛ sdot+sdot=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ sdot=
=
N
kNkNkN
NnNnn
nnx
ππ
πππππ
[ ] ( )( ) ( )( ) ( )
exist t doesn integers positive are and
2 cos1cos1cos
cos
3
3
3
33
3
NkN
kNNnNnn
nnx
there4
sdot=rArr+=+sdot=sdot=
=
Q
π
2004 SP- Berlin Chen 7
Sinusoid Signals (cont)
bull Complex Exponential Signalndash Use Eulerrsquos relation to express complex numbers
( )φφφ sincos
jAAez
jyxzj +==rArr
+=
( )number real a is A
Re
Im
φφ
sin cos
AyAx
==
22 yx + 22 yx
x
+22 yx
y
+
Imaginary part
real part
2004 SP- Berlin Chen 8
Sinusoid Signals (cont)
bull A Sinusoid Signal
[ ] ( )( )
φω
φω
φω
jnj
nj
eAeAe
nAnx
Re Re
cos
=
=
+=+
real part
2004 SP- Berlin Chen 9
Sinusoid Signals (cont)
bull Sum of two complex exponential signals with same frequency
ndash When only the real part is considered
ndash The sum of N sinusoids of the same frequency is another sinusoid of the same frequency
( ) ( )
( )
( )φω
φω
φφω
φωφω
+
++
=
=
+=
+
nj
jnj
jjnj
njnj
Ae
Aee
eAeAe
eAeA10
10
10
10
( ) ( ) ( )φωφωφω +=+++ nAnAnA coscoscos 1100
numbers real are and 10 AAA
2004 SP- Berlin Chen 10
Sinusoid Signals (cont)
bull Trigonometric Identities
1100
1100coscossinsintan
φφφφ
φAAAA
++
=
( ) ( )( )
( )10102
120
1010102
120
2
21100
21100
2
cos2
sinsincoscos2
sinsincoscos
φφ
φφφφ
φφφφ
minus++=
+++=
+++=
AAAA
AAAAA
AAAAA
2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 6
Sinusoid Signals (cont)[ ] ( )
( )
8
integers positive are and 824
44cos)(
4cos
4cos
4cos
1
11
11
1
=there4
sdotrArrsdot=rArr
⎟⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛=
=
N
kNkkN
NnNnn
nnx
ππ
πππππ
[ ] ( )
( )
( )
16
numbers positive are and 3
1628
3
83
83cos
83cos
83cos
83cos
2
222
22
2
=there4
=rArrsdot=sdotrArr
⎟⎠⎞
⎜⎝⎛ sdot+sdot=⎟
⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ sdot=
=
N
kNkNkN
NnNnn
nnx
ππ
πππππ
[ ] ( )( ) ( )( ) ( )
exist t doesn integers positive are and
2 cos1cos1cos
cos
3
3
3
33
3
NkN
kNNnNnn
nnx
there4
sdot=rArr+=+sdot=sdot=
=
Q
π
2004 SP- Berlin Chen 7
Sinusoid Signals (cont)
bull Complex Exponential Signalndash Use Eulerrsquos relation to express complex numbers
( )φφφ sincos
jAAez
jyxzj +==rArr
+=
( )number real a is A
Re
Im
φφ
sin cos
AyAx
==
22 yx + 22 yx
x
+22 yx
y
+
Imaginary part
real part
2004 SP- Berlin Chen 8
Sinusoid Signals (cont)
bull A Sinusoid Signal
[ ] ( )( )
φω
φω
φω
jnj
nj
eAeAe
nAnx
Re Re
cos
=
=
+=+
real part
2004 SP- Berlin Chen 9
Sinusoid Signals (cont)
bull Sum of two complex exponential signals with same frequency
ndash When only the real part is considered
ndash The sum of N sinusoids of the same frequency is another sinusoid of the same frequency
( ) ( )
( )
( )φω
φω
φφω
φωφω
+
++
=
=
+=
+
nj
jnj
jjnj
njnj
Ae
Aee
eAeAe
eAeA10
10
10
10
( ) ( ) ( )φωφωφω +=+++ nAnAnA coscoscos 1100
numbers real are and 10 AAA
2004 SP- Berlin Chen 10
Sinusoid Signals (cont)
bull Trigonometric Identities
1100
1100coscossinsintan
φφφφ
φAAAA
++
=
( ) ( )( )
( )10102
120
1010102
120
2
21100
21100
2
cos2
sinsincoscos2
sinsincoscos
φφ
φφφφ
φφφφ
minus++=
+++=
+++=
AAAA
AAAAA
AAAAA
2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2
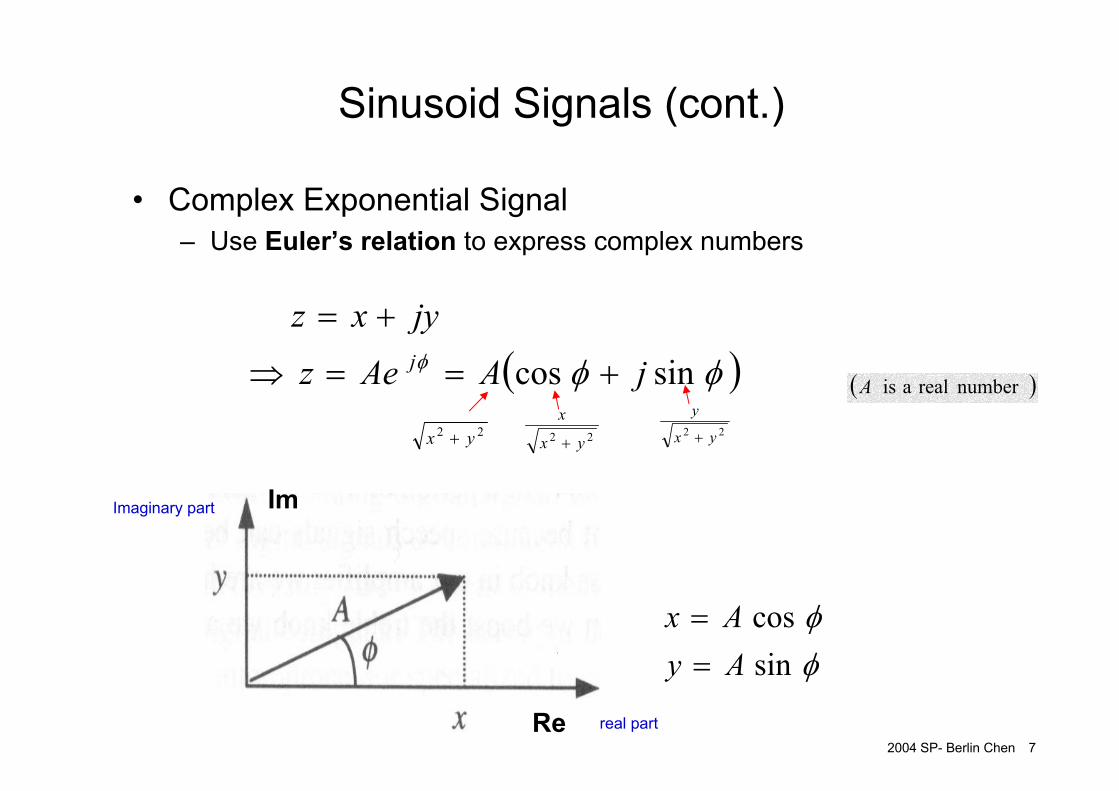
2004 SP- Berlin Chen 7
Sinusoid Signals (cont)
bull Complex Exponential Signalndash Use Eulerrsquos relation to express complex numbers
( )φφφ sincos
jAAez
jyxzj +==rArr
+=
( )number real a is A
Re
Im
φφ
sin cos
AyAx
==
22 yx + 22 yx
x
+22 yx
y
+
Imaginary part
real part
2004 SP- Berlin Chen 8
Sinusoid Signals (cont)
bull A Sinusoid Signal
[ ] ( )( )
φω
φω
φω
jnj
nj
eAeAe
nAnx
Re Re
cos
=
=
+=+
real part
2004 SP- Berlin Chen 9
Sinusoid Signals (cont)
bull Sum of two complex exponential signals with same frequency
ndash When only the real part is considered
ndash The sum of N sinusoids of the same frequency is another sinusoid of the same frequency
( ) ( )
( )
( )φω
φω
φφω
φωφω
+
++
=
=
+=
+
nj
jnj
jjnj
njnj
Ae
Aee
eAeAe
eAeA10
10
10
10
( ) ( ) ( )φωφωφω +=+++ nAnAnA coscoscos 1100
numbers real are and 10 AAA
2004 SP- Berlin Chen 10
Sinusoid Signals (cont)
bull Trigonometric Identities
1100
1100coscossinsintan
φφφφ
φAAAA
++
=
( ) ( )( )
( )10102
120
1010102
120
2
21100
21100
2
cos2
sinsincoscos2
sinsincoscos
φφ
φφφφ
φφφφ
minus++=
+++=
+++=
AAAA
AAAAA
AAAAA
2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2
2004 SP- Berlin Chen 8
Sinusoid Signals (cont)
bull A Sinusoid Signal
[ ] ( )( )
φω
φω
φω
jnj
nj
eAeAe
nAnx
Re Re
cos
=
=
+=+
real part
2004 SP- Berlin Chen 9
Sinusoid Signals (cont)
bull Sum of two complex exponential signals with same frequency
ndash When only the real part is considered
ndash The sum of N sinusoids of the same frequency is another sinusoid of the same frequency
( ) ( )
( )
( )φω
φω
φφω
φωφω
+
++
=
=
+=
+
nj
jnj
jjnj
njnj
Ae
Aee
eAeAe
eAeA10
10
10
10
( ) ( ) ( )φωφωφω +=+++ nAnAnA coscoscos 1100
numbers real are and 10 AAA
2004 SP- Berlin Chen 10
Sinusoid Signals (cont)
bull Trigonometric Identities
1100
1100coscossinsintan
φφφφ
φAAAA
++
=
( ) ( )( )
( )10102
120
1010102
120
2
21100
21100
2
cos2
sinsincoscos2
sinsincoscos
φφ
φφφφ
φφφφ
minus++=
+++=
+++=
AAAA
AAAAA
AAAAA
2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 9
Sinusoid Signals (cont)
bull Sum of two complex exponential signals with same frequency
ndash When only the real part is considered
ndash The sum of N sinusoids of the same frequency is another sinusoid of the same frequency
( ) ( )
( )
( )φω
φω
φφω
φωφω
+
++
=
=
+=
+
nj
jnj
jjnj
njnj
Ae
Aee
eAeAe
eAeA10
10
10
10
( ) ( ) ( )φωφωφω +=+++ nAnAnA coscoscos 1100
numbers real are and 10 AAA
2004 SP- Berlin Chen 10
Sinusoid Signals (cont)
bull Trigonometric Identities
1100
1100coscossinsintan
φφφφ
φAAAA
++
=
( ) ( )( )
( )10102
120
1010102
120
2
21100
21100
2
cos2
sinsincoscos2
sinsincoscos
φφ
φφφφ
φφφφ
minus++=
+++=
+++=
AAAA
AAAAA
AAAAA
2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 10
Sinusoid Signals (cont)
bull Trigonometric Identities
1100
1100coscossinsintan
φφφφ
φAAAA
++
=
( ) ( )( )
( )10102
120
1010102
120
2
21100
21100
2
cos2
sinsincoscos2
sinsincoscos
φφ
φφφφ
φφφφ
minus++=
+++=
+++=
AAAA
AAAAA
AAAAA
2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 11
Some Digital Signals
2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 12
Some Digital Signals
bull Any signal sequence can be represented as a sum of shift and scaled unit impulse sequences (signals)
[ ]nx
[ ] [ ] [ ]knkxnxk
minussum=infin
minusinfin=δ
scaleweightedTime-shifted unit impulse sequence
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ] ( ) [ ]31211121221
33221101122
3
2
minus+minusminus+minus+++minus++=minus+minus+minus+++minus++minus=
minus=minus= sumsumminus=
infin
minusinfin=
nnnnnnnxnxnxnxnxnx
knkxknkxnxkk
δδδδδδδδδδδδ
δδ
321012 minusminus=n
2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 13
Digital Systems
bull A digital system T is a system that given an input signal x[n] generates an output signal y[n]
[ ] [ ] nxTny =
[ ]nx bullT [ ]ny
2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 14
Properties of Digital Systems
bull Linearndash Linear combination of inputs maps to linear
combination of outputs
bull Time-invariant (Time-shift)ndash A time shift of in the input by m samples give a shift in
the output by m samples
[ ] [ ] [ ] [ ] nxbTnxaTnbxnaxT 2121 +=+
[ ] [ ] mmnxTmny forallplusmn=plusmn
time sift [ ][ ] samples shift left )0 (if
samples shift right )0 (if mmmnx
mmmnxrArrgt+rArrgtminus
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2
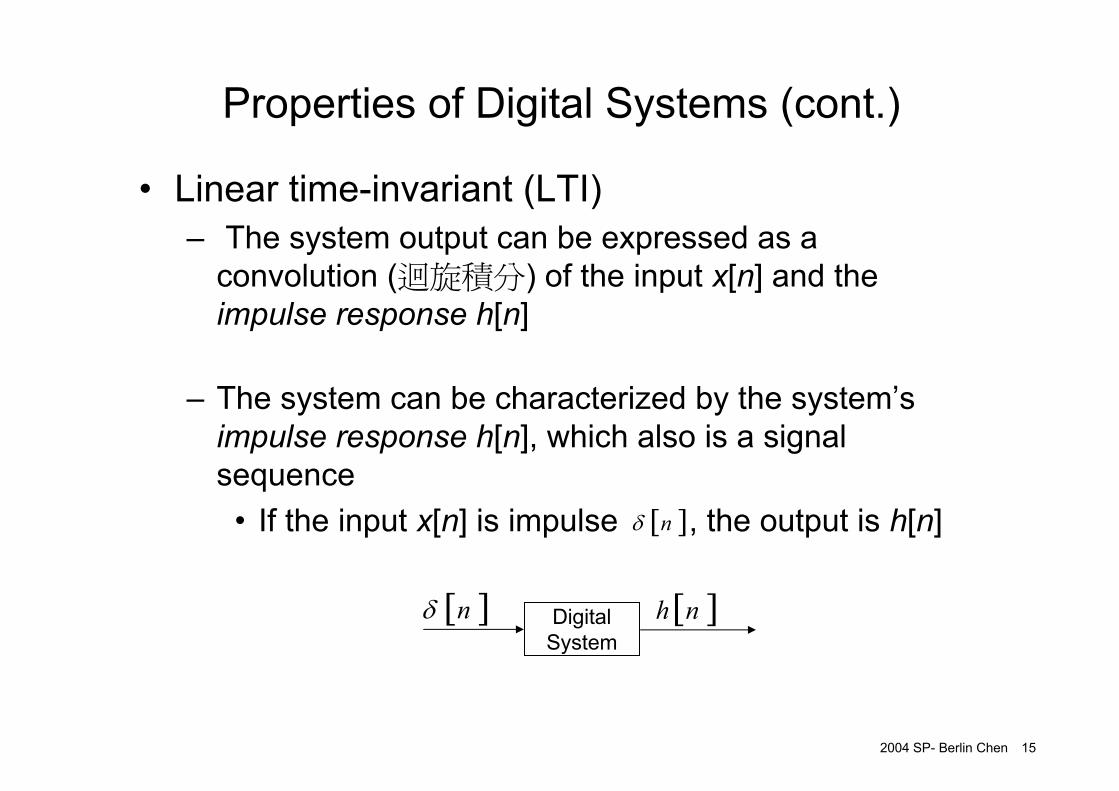
2004 SP- Berlin Chen 15
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash The system output can be expressed as a
convolution (迴旋積分) of the input x[n] and the impulse response h[n]
ndash The system can be characterized by the systemrsquos impulse response h[n] which also is a signal sequence
bull If the input x[n] is impulse the output is h[n][ ]nδ
DigitalSystem
[ ]nδ [ ]nh
2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 16
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Explanation
[ ] [ ] [ ]knkxnxk
minus= suminfin
minusinfin=δ
[ ] [ ] [ ] [ ] [ ]
[ ] [ ][ ] [ ]nhnx
knhkx
knTkx
knkxTnxT
k
k
k
lowast=
minus=
minus=
minus=rArr
sum
sum
sum
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
δ
δ
scale
Time-shifted unit impulse sequence
Time invariant
DigitalSystem
[ ]nδ [ ]nh
linear
Time-invariant
[ ] [ ][ ] [ ]knhkn
nhnT
T
minus⎯rarr⎯minus
⎯rarr⎯
δ
δ
Impulse response
convolution
2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 17
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution
bull Example
[ ]nδ 0 12
13
-2[ ]nh
LTI[ ]nx
0 1 2
23
1
0
3
0 12
39
-6
1
2
1 23
26
-4
LTI
2
1
2 34
1 3
-2
Length=M=3
Length=L=3
Length=L+M-1
[ ]nδsdot3
[ ]12 minussdot nδ
[ ]21 minussdot nδ
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]ny
[ ]nhsdot3
[ ]12 minussdot nh
[ ]2minusnh
2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 18
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution Generalization
bull Reflect h[k] about the origin (rarr h[-k]) bull Slide (h[-k] rarr h[-k+n] or h[-(k-n)] ) multiply it with
x[k]bull Sum up [ ]kx
[ ]kh
[ ]kh minus
Reflect Multiply
slide
Sum up
n
[ ] [ ] [ ]
[ ] ( )[ ]nkhkx
knhkxny
k
k
minusminus=
minus=
sum
suminfin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 19
0 12
13
-2
0-1-2
13
-2
0 1 2
23
1
0
3
10-1
13
-21
11
210
13
-2
1
2
321
13
-2 -1
3
432
13
-2 -2
4
0
3
1
11
2
13
-1
4
-2
Sum up
[ ]kh
[ ]kx
[ ]kh minus
[ ] 0 =nny
[ ]1+minuskh
[ ]2+minuskh
[ ]3+minuskh
[ ]4+minuskh
[ ] 1 =nny
[ ] 2 =nny
[ ] 3 =nny
[ ] 4 =nny
[ ]ny
Reflect [ ] [ ] [ ][ ] [ ]knhkx
nhnxny
kminus=
lowast=
suminfin
minusinfin=
Convolution
2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 20
Properties of Digital Systems (cont)
bull Linear time-invariant (LTI)ndash Convolution is commutative and distributive
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ]nh 1 [ ]nh 2 [ ]nh 2 [ ]nh 1
[ ]nh 2
[ ]nh 1
[ ] [ ]nhnh 21 +
ndash An impulse response has finite durationraquo Finite-Impulse Response (FIR)
ndash An impulse response has infinite durationraquo Infinite-Impulse Response (IIR)
[ ] [ ] [ ][ ] [ ] [ ]nhnhnx
nhnhnx
12
21
=
[ ] [ ] [ ]( )[ ] [ ] [ ] [ ]nhnxnhnx
nhnhnx
21
21
+=+
Commutation
Distribution
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2
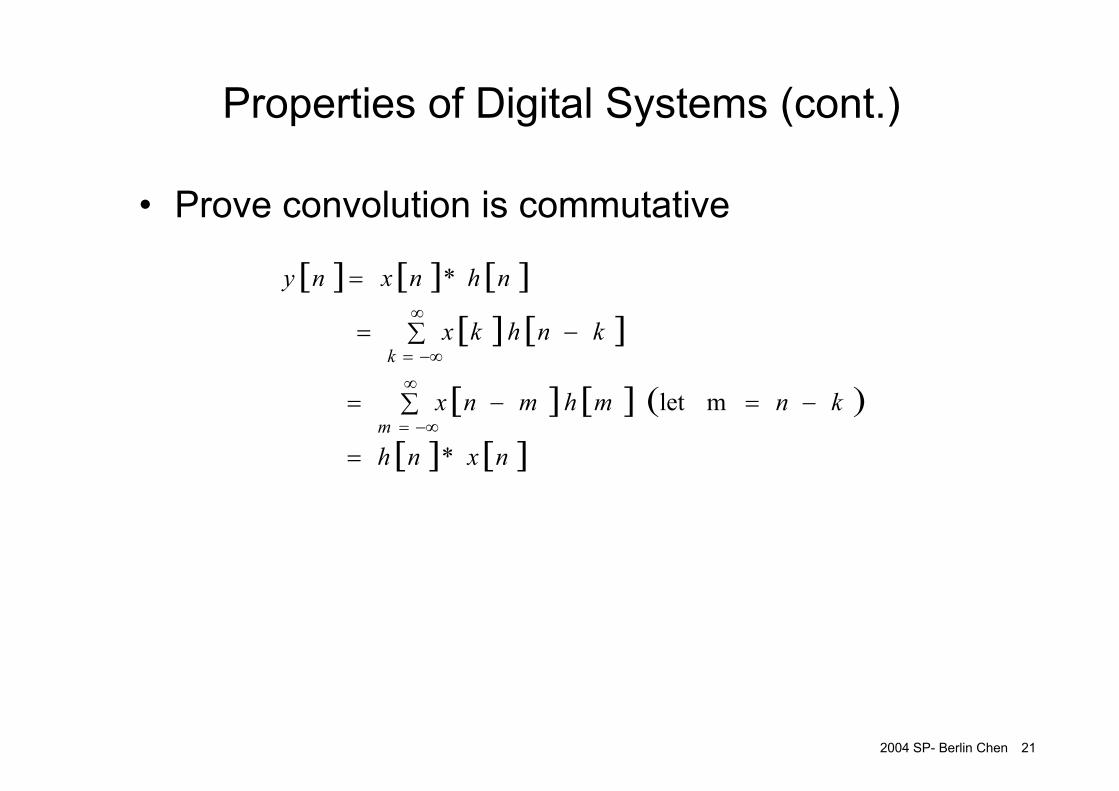
2004 SP- Berlin Chen 21
Properties of Digital Systems (cont)
bull Prove convolution is commutative
[ ] [ ] [ ]
[ ] [ ]
[ ] [ ] ( )
[ ] [ ]nxnh
knmhmnx
knhkx
nhnxny
m
k
mlet
=
minus=sum minus=
minussum=
=
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 22
Properties of Digital Systems (cont)
bull Linear time-varying Systemndash Eg is an amplitude modulator [ ] [ ] nnxny 0cos ω=
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] ( )0000
00011
0
101
cosBut
coscos
suppose
nnωnnxnny
nnnxnnxny
nnynynnxnx
minusminus=minus
minus==
minus=rArrminus=
ωω
2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 23
Properties of Digital Systems (cont)
bull Bounded Input and Bounded Output (BIBO) stable
ndash A LTI system is BIBO if only if h[n] is absolutely summable
[ ] infinlesuminfin
minusinfin=kkh
[ ][ ] nBny
nBnx
y
x
forallinfinltle
forallinfinltle
2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 24
Properties of Digital Systems (cont)
bull Causalityndash A system is ldquocasualrdquo if for every choice of n0 the output
sequence value at indexing n=n0 depends on only the input sequence value for nlen0
ndash Any noncausal FIR can be made causal by adding sufficient long delay
[ ] [ ] [ ]sum sum= =
minus+minus=K
k
M
mkkk mnxknyny
1000 βα
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 25
Discrete-Time Fourier Transform (DTFT)
bull Frequency Responsendash Defined as the discrete-time Fourier Transform of
ndash is continuous and is periodic with period=
ndash is a complex function of
[ ]nh( )ωjeH
π2( )ωjeH
ω( ) ( ) ( )
( ) ( )ωω
ωωω
jeHjj
ji
jr
j
eeH
ejHeHeHang=
+=
magnitudephase
( )ωjeH
proportional to twotimes of the samplingfrequency
2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 26
Discrete-Time Fourier Transform (cont)
bull Representation of Sequences by Fourier Transform
ndash A sufficient condition for the existence of Fourier transform
[ ] infinltsuminfin
minusinfin=nnh
[ ]( )
( )
[ ]mnnmnm
mnmn
emnj
de
mnj
mnj
minus=⎩⎨⎧
ne=
=
minusminus
=
minus= minus
minus
minusminus
int
δ
πππ
ωπ
ππ
ω
ππ
ω
0 1
sin)(2
121
)(
)(
( ) [ ]
[ ] ( ) [ ]
[ ] [ ] [ ] [ ]nhmnmhdemh
deemhdeeHnh
enheH
m
mnj
m
nj
m
mjnjj
n
njj
=minus==
==
=
sumintsum
int sumint
sum
infin
minusinfin=minus
minusinfin
minusinfin=
minus
infin
minusinfin=
minusminus
infin
minusinfin=
minus
δωπ
ωπ
ωπ
ππ
ω
ππ
ωωππ
ωω
ωω
21
21
21
invertible is ansformFourier tr
)(
( ) [ ]
[ ] ( )int
sum
minus
infin
minusinfin=
minus
=
=
ππ
ωω
ωω
ωπ
deeHnh
enheH
njj
n
njj
2
1
absolutely summable
DTFT
Inverse DTFT
2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 27
Discrete-Time Fourier Transform (cont)bull Convolution Property
( ) [ ]
[ ] [ ] [ ]
( ) [ ] [ ]
[ ] [ ]
( ) ( )
[ ] ( ) ( )ωω
ωω
ωω
ωω
ωω
jj
jj
nj
nk
kj
nj
n k
j
k
n
njj
eHeXnhnx
eHeX
enhekx
eknhkxeY
knhkxnhnxny
enheH
hArrlowastthere4
=
⎟⎠
⎞⎜⎝
⎛=
minus=
minus=lowast=
=
minusinfin
minusinfin=
infin
minusinfin=
minus
minusinfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus
sumsum
sum sum
sum
sum
][
][][
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )ωωω
ωωω
ωωω
jjj
jjj
jjj
eHeXeY
eHeXeY
eHeXeY
ang+ang=angrArr
=rArr
=
knnknnknn
minusminus=minusrArr+=rArrminus=
2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 28
Discrete-Time Fourier Transform (cont)
bull Parsevalrsquos Theorem
ndash Define the autocorrelation of signal
[ ] ( )intsum minus
infin
minusinfin== π
πω ω
πdeXnx j
n
22 21
power spectrum
[ ]nx[ ]
( ) ][][][][
][][
nxnxlnxlx
mxnmxnR
l
mxx
minuslowast=minusminus=
+=
lowastinfin
minusinfin=
infin
minusinfin=
sum
sum
( ) ( ) ( ) ( ) 2 ωωωω XXXS xx ==
hArr
[ ] ( ) ( )intint minusminus==
π
π
ωπ
π
ω ωωπ
ωωπ
deXdeSnR njnjxxxx
2
21
21
[ ] [ ] [ ] [ ] ( )sum intsuminfin
minusinfin=minus
infin
minusinfin=
===
=
mmxx dXmxmxmxR
nπ
πωω
π22
210
0Set
The total energy of a signalcan be given in either the time or frequency domain
)(
lnnlmnml
minusminus=minus=rArr+=
jyxz jyxz minus=rArr+=
conjugatecomplex
2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 29
Discrete-Time Fourier Transform (DTFT)
bull A LTI system with impulse responsendash What is the output for
[ ]nh[ ]ny [ ] ( )φω += nAnx cos
[ ] ( )[ ] [ ] [ ] ( )
[ ] ( ) [ ]
[ ] ( )( )
( ) [ ]( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( ) ( )( )[ ] ( ) ( ) ( )( )ωω
ωωωω
φωω
ωφω
ωφω
ωφω
φω
φω
φω
φω
φωφω
φω
ω
ω
jj
jjjj
eHjnjj
eHjjnj
jnj
kj
k
nj
knj
k
nj
nj
eHneHAny
eHneHjAeHneHA
eeHA
eeHAe
eHAe
ekhAe
Aekh
nhAeny
Aenxnxnx
njAnx
j
j
ang++=rArr
ang+++ang++=
=
=
=
sum=
sum=
=
=+=
+=
ang++
ang+
+
minusinfin
minusinfin=
+
+minusinfin
minusinfin=
+
+
cos
sincos
sin
0
10
1
[ ]ny [ ]ny1
( )( ) attenuate 1
amplify 1
lt
gt
ω
ω
j
j
eH
eH
Systemrsquos frequency response
2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 30
Discrete-Time Fourier Transform (cont)
2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 31
Z-Transform
bull z-transform is a generalization of (Discrete-Time) Fourier transform
ndash z-transform of is defined as
bull Where a complex-variablebull For Fourier transform
ndash z-transform evaluated on the unit circle
( ) [ ]suminfin
minusinfin=
minus=n
nznhzH
[ ] ( )zHnh
[ ] ( )ωjeHnh
[ ]nh
ωjrez =
( ) ( ) ωω
jezj zHeH
==
)1( == zez jω
complex plane
unit circle
Im
Re
ω
ωjez =
2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 32
Z-Transform (cont)
bull Fourier transform vs z-transformndash Fourier transform used to plot the frequency response of a filterndash z-transform used to analyze more general filter characteristics eg
stability
bull ROC (Region of Converge)ndash Is the set of z for which z-transform exists (converges)
ndash In general ROC is a ring-shaped region and the Fourier transform exists if ROC includes the unit circle ( )
[ ] infinltsuminfin
minusinfin=
minus
n
nznh
complex plan
R1
R2
Re
Im
absolutely summable
1=z
2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 33
Z-Transform (cont)
bull An LTI system is defined to be causal if its impulse response is a causal signal ie
ndash Similarly anti-causal can be defined as
bull An LTI system is defined to be stable if for every bounded input it produces a bounded outputndash Necessary condition
bull That is Fourier transform exists and therefore z-transform include the unit circle in its region of converge
[ ] 0for 0 lt= nnh
[ ] 0for 0 gt= nnh
Right-sided sequence
Left-sided sequence
[ ] infinltsuminfin
minusinfin=nnh
[ ] [ ] [ ][ ] [ ]
[ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 34
Z-Transform (cont)
bull Right-Sided Sequencendash Eg the exponential signal
[ ] [ ] [ ]⎩⎨⎧
ltge
==0for 00for 1
ere wh 1 1 nn
nunuanh n
( ) ( ) 11
1 11
minus
infin
minusinfin=
minusminusinfin
minusinfin= minus=== sumsum
azazzazH
n
nn
n
n
If 11 ltminusaz
azROC gtthere4 is 1
Re
Im
a[ ] 1 if exists
ofansformFourier tr
1 ltanhtimes
have a pole at(Pole z-transform goes to infinity)
az =
the unit cycle
0
2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 35
Z-Transform (cont)
bull Left-Sided Sequencendash Eg
[ ] [ ] )-0-1-2(n 1 2 2 infin=minusminusminus= nuanh n
( ) [ ]
( ) 11
1
10
1
1
12
11
11111
1
minusminus
minus
minus
infin
=
minusinfin
=
minus
minusminus
minusinfin=
minusinfin
minusinfin=
minus=
minusminus
minus=minus
minus=minus=minus=
minus=minusminusminus=
sumsum
sumsum
azzaza
zazaza
zaznuazH
n
n
n
nn
n
n
nn
n
n If 11 ltminus za
azROC ltthere4 is 2
Re
Im
a[ ] [ ]
minusinfinrarr
lt
nnhnh
a
aslly exponentia go will because existt doesn
of ansformFourier tr the1when
22times
the unit cycle
0
2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 36
Z-Transform (cont)
bull Two-Sided Sequencendash Eg
[ ] [ ] [ ]121
31 3 3 minusminus⎟
⎠⎞
⎜⎝⎛minus⎟
⎠⎞
⎜⎝⎛minus= nununh
nn
[ ]
[ ]21
211
1 121
31
311
1 31
1
1
ltminus
⎯rarrlarrminusminus⎟⎠⎞
⎜⎝⎛minus
gt+
⎯rarrlarr⎟⎠⎞
⎜⎝⎛ minus
minus
minus
zz
nu
zz
nu
zn
zn
Re
Im
times
the unit cycle
times21
31
minus [ ]circleunit theincludet doesn because
existt doesn of ansformFourier tr
3
3
ROCnh
31 and
21 is 3 gtltthere4 zzROC
( )⎟⎠⎞
⎜⎝⎛ minus⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ minus
=minus
++
=minusminus
21
31
1212
211
1
311
1 11
3
zz
zz
zzzH
0
2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 37
Z-Transform (cont)
bull Finite-length Sequencendash Eg
[ ]⎩⎨⎧ minuslele
=others 0
10 3 4
Nnanh
n
( ) ( ) ( )azaz
zazazazzazH
NN
N
NN
n
nN
n
nn
minusminus
=minus
minus=== minusminus
minusminus
=
minusminus
=
minus sumsum 11
11
0
11
04
11
1
0except plane- entire is 4 =there4 zzROC
13221 minusminusminusminus ++++ NNNN azaazz
Im
times
the unit cycle
31
minus
7 poles at zero A pole and zero at is cancelled az =
4π
( ) 11 2
minus== N kaez Nkj
k
π
If N=8
0 N-1
Re
2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 38
Z-Transform (cont)
bull Properties of z-transform1 If is right-sided sequence ie and if ROC
is the exterior of some circle the all finite for which will be in ROC
bull If ROC will include
2 If is left-sided sequence ie the ROC is the interior of some circle
bull If ROC will include 3 If is two-sided sequence the ROC is a ring4 The ROC canrsquot contain any poles
[ ]nh [ ] 1 0 nnnh le=
01 gen
0rz gtz
infin=z
[ ]nh [ ] 2 0 nnnh ge=
02 ltn 0=z[ ]nh
A causal sequence is right-sided with ROC is the exterior of circle including
01 geninfin=zthere4
2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 39
Summary of the Fourier and z-transforms
2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 40
LTI Systems in the Frequency Domain
bull Example 1 A complex exponential sequencendash System impulse response
ndash Therefore a complex exponential input to an LTI systemresults in the same complex exponential at the output but modified by
bull The complex exponential is an eigenfunction of an LTI system and is the associated eigenvalue
[ ]nh
[ ] [ ] [ ] [ ]
[ ]
( ) njj
kjnj
knj
eeH
ekhe
ekhnhnxny
ωω
ωω
ω
=
=
=lowast=
minusinfin
infin=
minusinfin
infin=
sum
sum
-k
)(
-k( )
responsefrequency system theas toreferredoften isIt
response impulse system the of ansformFourier tr theωjeH
[ ] njenx ω=[ ] [ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ]knxkh
knhkx
nxnhnhnxny
k
k
minus=
minus=
==
sum
sum
infin
minusinfin=
infin
minusinfin=
[ ] ( ) [ ]nxeHnxT jω=
( )jωeH
( )jωeH
scalar
2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 41
[ ] ( ) ( )
( ) ( )[ ]
( ) ( ) ( ) ( )[ ]( ) ( )[ ]00
00
000
0
0000
0000
0
)()(
)()(
cos 2
2
22
jωjω
njeHjjωnjeHjjω
njjωnjjω
njjjωnjjjω
eHneHA
eeeHeeeHA
eeHeeHA
eeAeHeeAeHny
jωjω
ang++=
+=
+=
+=
+minusangminus+ang
+minus+
minusminusminus
φω
φωφω
φωφω
ωφωφ
LTI Systems in the Frequency Domain (cont)
bull Example 2 A sinusoidal sequence
ndash System impulse response
[ ] ( )φ+= nwAnx 0cos[ ] ( )
njjnjj eeAeeAnAnx
00
22
cos 0
ωφωφ
φω
minusminus+=
+=
[ ]nh
( )θθ
θ
θ
θ
θθ
θθ
jj
j
j
ee
ieie
minus
minus
+=rArr
minus=
+=
21cos
sincossincos
( ) ( )( ) ( ) ( )0
00
00
jωeHjjωjω
jωjω
eeHeH
eHeHangminus
minus
=
=
( )( ) ( )
ωωωω
ωω
ωω
ω
ω
ω
sincos sincos
sincos
sincos
jje
jejyxz
jejyxz
j
j
j
minus=minus+minus=
minus=rArrminus=
+=rArr+=
minus
magnitude response phase response
2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 42
LTI Systems in the Frequency Domain (cont)
bull Example 3 A sum of sinusoidal sequences
ndash A similar expression is obtained for an input consisting of a sum of complex exponentials
[ ] ( )sum=
+=K
kkkk nAnx
1cos φω
[ ] ( ) ( )[ ]sum=
ang++=K
k
jkk
jk
kk eHneHAny1
cos ωω φωmagnitude response phase response
2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 43
LTI Systems in the Frequency Domain (cont)
bull Example 4 Convolution Theorem
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ] [ ] 1 lt= suminfin
minusinfin=
anuanhk
n
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minus= sum
infin
minusinfin=
kPP
eXk
j πωδπω 22
( ) ωω
jj
aeeH minusminus
=1
1
DTFT
DTFT
( ) ( ) ( )
ω
ω
ωωω
π
πωδπ
j
kj
jjj
aeP
kPPae
eXeHeY
minus
infin
minusinfin=minus
minus=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ minussum
minus=
=
112
221
1
[ ] [ ] ( ) ( )ωω jj eHeXnhnx hArrlowast
has a nonzero value when
πω2
Pk =
2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 44
LTI Systems in the Frequency Domain (cont)
bull Example 5 Windowing Theorem [ ] [ ] ( ) ( )ωω
πjj eXeWnwnx lowasthArr
21
[ ] [ ]suminfin
minusinfin=minus=
kkPnnx δ
[ ]⎪⎩
⎪⎨⎧
minus=⎟⎠⎞
⎜⎝⎛
minusminus=
otherwise 0
110 1
2cos460540 NnN
nnw
πHamming window
( ) ( ) ( )
( )
( )
( )
sum
sum sum
sum
sum
infin
minusinfin=
⎟⎠⎞
⎜⎝⎛ minus
infin
minusinfin=
infin=
minusinfin=
infin
minusinfin=
infin
minusinfin=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minusminus=
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ minuslowast=
⎟⎠⎞
⎜⎝⎛ minuslowast=
lowast=
k
kP
j
k
m
m
jm
k
j
k
j
jjj
eWP
mkP
eWP
kP
eWP
kPP
eW
eXeWeY
πω
ω
ω
ωωω
πωδ
πωδ
πωδππ
π
21
2 1
21
2221
21
has a nonzero value when
kP
m πω 2minus=
2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 45
Difference Equation Realization for a Digital Filter
bull The relation between the output and input of a digital filter can be expressed by
[ ] [ ] [ ]sum sum= =
minus+minus=N
k
M
kkk knxknyny
1 0βα
( ) ( ) ( ) kN
k
M
kk
kk zzXzzYzY minus
= =
minussum sum+=1 0
βα
delay property
( ) ( )( ) sum
sum
=
minus
=
minus
minus== N
k
kk
M
k
kk
z
z
zXzYzH
1
0
1 α
β
[ ] ( )[ ] ( ) 0
0nzzXnnx
zXnxminusrarrminus
rarrlinearity and delay properties
A rational transfer functionCausalRightsided the ROC outside the outmost poleStableThe ROC includes the unit circleCausal and Stableall poles must fall inside the unit circle (not including zeros)
z-1
z-1
z-1
Mβ
2β
0β [ ]ny[ ]nx
1β
z-1
z-1
z-1
1α
2α
Nα
2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 46
Difference Equation Realization for a Digital Filter (cont)
2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 47
Magnitude-Phase Relationship
bull Minimum phase systemndash The z-transform of a system impulse response sequence ( a
rational transfer function) has all zeros as well as poles inside the unit cycle
ndash Poles and zeros called ldquominimum phase componentsrdquondash Maximum phase all zeros (or poles) outside the unit cycle
bull All-pass systemndash Consist a cascade of factor of the form
ndash Characterized by a frequency responsewith unit (or flat) magnitude for all frequencies
1
111
plusmn
minus ⎥⎦
⎤⎢⎣
⎡
minus azz-a
Poles and zeros occur at conjugate reciprocal locations
111
1 =minus minusaz
z-a
2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 48
Magnitude-Phase Relationship (cont)
bull Any digital filter can be represented by the cascade of a minimum-phase system and an all-pass system
( ) ( ) ( )zHzHzH apmin=
( )( )
( ) ( )( ) ( )
( )( ) ( )( )
( )( )( )( ) filter pass-all a is 11
filter phase minimum a also is 1
where
111
filter) phase minimum a is ( 1
as expressed becan circleunit theoutside
1)( 1 zero oneonly has that Suppose
1
11
1
1
1
1
1
minus
minus
minusminus
minusminus
minus
minusminus
minus=
minus=
lt
azza
azzH
azzaazzH
zHzazHzH
zH
aazH
2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 49
FIR Filters
bull FIR (Finite Impulse Response)ndash The impulse response of an FIR filter has finite durationndash Have no denominator in the rational function
bull No feedback in the difference equation
ndash Can be implemented with simple a train of delay multiple and add operations
( )zH
[ ] [ ]sum=
minus=M
rr rnxny
0β
z-1
z-1
z-1
Mβ
1β0β
[ ]ny[ ]nx
[ ]⎩⎨⎧ lele
=otherwise 00 Mn
nh nβ
( ) ( )( ) sum
=
minus==M
k
kk z
zXzYzH
0β
2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 50
First-Order FIR Filters
bull A special case of FIR filters
[ ] [ ] [ ]1minus+= nxnxny α ( ) 11 minus+= zzH α
( ) ωω α jj eeH minus+= 1( ) ( )( ) ( )
( ) ⎟⎠⎞
⎜⎝⎛
+minus=
+=++=
minus+=
ωαωαθ
ωαωαωα
ωωα
ω
ω
cos1sinarctan
cos21sincos1
sincos122
22
j
j
e
jeH
( ) 2log10 ωjeH
pre-emphasis filter0ltα
2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 51
Discrete Fourier Transform (DFT)
bull The Fourier transform of a discrete-time sequence is a continuous function of frequencyndash We need to sample the Fourier transform finely enough to be
able to recover the sequencendash For a sequence of finite length N sampling yields the new
transform referred to as discrete Fourier transform (DFT)
( ) [ ]
[ ] ( ) 10 1
10
21
0
21
0
minuslelesum=
minuslelesum=
minus
=
minusminus
=
NnekXN
nx
NnenxkX
knN
jN
k
knN
jN
nπ
π
Inverse DFT Synthesis
DFT Analysis
2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 52
Discrete Fourier Transform (cont)
[ ] [ ]
( )
( ) ( ) ( )
[ ][ ]
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
minus⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
minuslele=
minusleleforall
minussdotminusminussdotminusminus
minussdotminussdotminus
minusminus
=sum
1
10
1
10
1
1
111
10
10
112112
112112
21
0
NX
XX
Nx
xx
ee
ee
NnenxkX
Nk
NNN
jNN
j
NN
jN
j
knN
jN
n
MM
L
MLMM
L
L
ππ
ππ
π
2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 53
Discrete Fourier Transform (cont)
bull Orthogonality of Complex Exponentials ( )
⎩⎨⎧ =
=summinus
=
minus
otherwise 0 if 11 1
0
2 mNk-re
N
N
n
nrkN
j π
[ ] [ ]
[ ] [ ]( )
[ ]( )
[ ]
[ ] [ ]kn
Nj
nrkN
j
nrkN
jrnN
j
knN
j
enxkX
rX
eN
kX
ekXN
enx
ekXN
nx
N
r
N
n
N
k
N
n
N
k
N
n
N
k
π
π
ππ
π
2
2
22
2
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
1
1
minus
minus
minusminus
sum
sumsum
sum sumsum
sum
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
minus
=
=rArr
=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=rArr
=
[ ] [ ][ ]rX
mNrXkX=
+=
2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 54
Discrete Fourier Transform (DFT)
bull Parsevalrsquos theorem
[ ] ( )sumsumminus
=
minus
=
=1
0
21
0
2 1 N
k
N
nkX
Nnx Energy density
2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 55
Analog Signal to Digital Signal
[ ] ( ) period sampling TnTxnx a=
rate sampling 1TFs =
Analog Signal
Discrete-time Signal or Digital Signal
nTt =
sampling period=125μs=gtsampling rate=8kHz
Digital SignalDiscrete-time
signal with discreteamplitude
2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 56
Analog Signal to Digital Signal (cont)
Impulse TrainTo
Sequence [ ] ( ))( ˆ nTxnx a=
Sampling
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
( )tx a
Continuous-TimeSignal
Discrete-TimeSignal
Digital Signal
Discrete-time signal with discrete
amplitude
[ ] nx
Continuous-Time to Discrete-Time Conversion
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
Periodic Impulse Train ( ) [ ]nxtxs by specifieduniquely becan
switch
( )tx a
( ) ( )suminfin
minusinfin=minus=
nnTtts δ
( )
( )intinfin
infinminus
=
neforall=
1
0 0
dtt
tt
δ
δ1
T0 2T 3T 4T 5T 6T 7T 8T-T-2T
2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 57
Analog Signal to Digital Signal (cont)
bull A continuous signal sampled at different periods
T
1
( )tx a ( )tx a
( )
( ) ( ) ( ) ( )
( ) ( ) [ ] ( )sumsum
suminfin
minusinfin=
infin
minusinfin=
infin
minusinfin=
minus=minus=
minus==
nna
naa
s
nTtnxnTtnTx
nTttxtstx
tx
δδ
δ
2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 58
Analog Signal to Digital Signal (cont)
( )ΩjXa
frequency) (sampling22ss F
Tππ
==Ω
⎟⎠⎞
⎜⎝⎛=ΩltΩ
TsNπ
21
⎟⎠⎞
⎜⎝⎛=ΩgtΩ
TsNπ
21
aliasing distortion
( ) ( )suminfin
minusinfin=ΩminusΩ=Ω
ksk
TjS δπ2
( ) ( ) ( )
( ) ( )( )suminfin
minusinfin=
ΩminusΩ=Ω
ΩlowastΩ=Ω
ksas
as
kjXT
jX
jSjXjX
121π
NΩ
( )⎭⎬⎫
⎩⎨⎧
ΩgtΩrArrΩgtΩminusΩ
2 Ns
NNsQ
( )⎭⎬⎫
⎩⎨⎧
ΩltΩrArrΩltΩminusΩ
2 Ns
NNsQ
( )⎩⎨⎧ ΩltΩ
=ΩΩ otherwise 0 2 sT
jRs
( ) ( ) ( )ΩΩ=Ω Ω jXjRjX pa s
( ) ( )ΩΩ jXjX pa from recovered bet can
Low-pass filter
high frequency componentsgot superimposed onlow frequency components
bull Spectra
2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2

2004 SP- Berlin Chen 59
Analog Signal to Digital Signal (cont)
bull To avoid aliasing (overlapping fold over)ndash The sampling frequency should be greater than two times of
frequency of the signal to be sampled rarrndash (Nyquist) sampling theorem
bull To reconstruct the original continuous signalndash Filtered with a low pass filter with band limit
bull Convolved in time domain sΩ
( ) tth sΩ= sinc
( ) ( ) ( )
( ) ( )sum
suminfin
minusinfin=
infin
minusinfin=
minusΩ=
minus=
nsa
naa
nTtnTx
nTthnTxtx
sinc
Ns ΩgtΩ 2