solving engineering system dynamics problems with matlab.pdf
TRANSCRIPT


Copyright © 2007, New Age International (P) Ltd., PublishersPublished by New Age International (P) Ltd., Publishers
All rights reserved.No part of this ebook may be reproduced in any form, by photostat, microfilm,xerography, or any other means, or incorporated into any information retrievalsystem, electronic or mechanical, without the written permission of the publisher.All inquiries should be emailed to [email protected]
PUBLISHING FOR ONE WORLD
NEW AGE INTERNATIONAL (P) LIMITED, PUBLISHERS4835/24, Ansari Road, Daryaganj, New Delhi - 110002Visit us at www.newagepublishers.com
ISBN (13) : 978-81-224-2539-0
‘T‘T‘T‘T‘To Lord Sro Lord Sro Lord Sro Lord Sro Lord Sri Vi Vi Vi Vi Venkateswara’enkateswara’enkateswara’enkateswara’enkateswara’#$
"
#$%& #' ( #
# )
*
%
& #' #
+ " ,
-*./ (# ) *
01) 1 * " *
#/ ##
## %2 # #'
" %
3# %&
# %
# #%45
%
&,0# 6%6
&,0%&,0 / %&,0#
/ ('
% &,0 # # + &
2'4%7. 1 '35893%4 &,0
/
%& * &,0/ #
&#"&#"# %
7 # &,0
% * *
%
67 #/'""
# #
# %
4 #'
%
" # # *
# #'%*
# #4%
!

$%&'()&
4/ /'%/'*
#'%4/ '' ( *
/ /4
/'/ # /#'
#'%4 4/ #
# # #'% 4/ ''/*
# #+/ *
#- / -: //
%
4/ # #
#'% / ; *
* !+,,**
!
$'&&
, !
* -.
/0*
3%5 4 %%% 5
3%6 %%% 5
3%7 %%% 5
3%< %%% 6
3%= %%% 6
3%9 %%% <
3%9%5 %%% <
3%9%6 %%% <
3%9%7 %%% <
3%9%< %%% <
%%% =
1$
5%5 4 %%% 9
5%6 %%% 9
5%6%5" %%% 8
5%7 %%% >
5%< %%% ?
5%= %%% 55
5%=%5 %%% 56
5%9 #' %%% 57
5%8 #' %%% 57
5%> #$ %%% 5<
%%% 5=
- %%% 5=
%%% 66
2
6%5 4 %%% <?
6%5%5 @ &,0 %%% =3
6%5%6 2 / %%% =3
6%5%7 %%% =3
6%5%<&,0" %%% =3

6%5%=# %%% =3
6%5%9& %%% =3
6%5%8& A %%% =3
6%5%>& %%% =3
6%5%?. %%% =3
6%5%53 # %%% =5
6%6 %%% =5
6%7 %%% =5
6%< # * %%% =6
6%= : # %%% =<
6%9 # %%% =<
6%8 # %%% ==
6%> %%% ==
6%? %%% =8
6%?%5-/ %%% =8
6%?%6 %%% =8
6%?%7 " %%% =8
6%?%< %%% =>
6%?%= " %%% =>
6%?%9 %%% =>
6%?%80 * %%% =>
6%53 B / %%% 93
6%53%5 # %%% 93
6%53%6 %%% 93
6%53%7 %%% 93
6%53%< %%% 93
6%53%=4 " %%% 93
6%53%94 " %%% 95
6%53%8& %%% 95
6%53%> %%% 95
6%53%? %%% 95
6%53%53, %%% 95
6%53%55- %%% 95
6%53%56 %%% 95
6%55 *#* %%% 96
6%55%50 * %%% 97
6%56 -# %%% 9<
6%56%5& %%% 9=
6%57 %%% 9=
!

6%5< ) %%% 98
6%5<%5 " %%% 98
6%5<%6 " %%% 98
6%5= %%% 86
6%5=%5 %%% 86
6%5=%6- %%% 87
6%5=%74 %%% 87
6%5=%<B %%% 87
6%59 &,0 %%% 8<
6%59%5- %%% 8<
6%59%6B %%% 8=
6%59%70 * %%% 8=
6%59%< %%% 89
6%59%=1 %%% 88
6%59%91 %%% 88
6%59%8&,0/ %%% 88
6%58 %%% >3
6%58%50 6* %%% >3
6%58%6 (6* %%% >3
6%58%77* %%% >5
6%58%< %%% >>
6%5> 4CB &,0 %%% >>
6%5>%5& %%% >>
6%5? # %%% >?
6%5?%5# " %%% >?
6%5?%6 ) %%% ?5
6%5?%7 %%% ?6
6%63 & %%% ?<
6%63%5 (0 !C ! %%% ?=
6%65 %%% ?=
6%65%5& %%% ?=
6%65%6 %%% ?=
6%66 & %%% ?>
%%% 57<
- %%% 57=
# %%% 579
3 145
7%5 4 %%% 5<>
7%6 & %%% 5<>
7%7 - %%% 5<>
!

7%< * %%% 5=3
7%= -* %%% 5=3
7%9 0 %%% 5=6
7%8 1) %%% 5=?
7%8%5 %%% 5=?
7%8%61 %%% 593
7%> 1 %%% 595
7%>%5# * %%% 595
7%? )
) %%% 596
7%53 & %%% 596
7%53%5&
%%% 597
7%53%6&
%%% 597
7%55 0 * %%% 597
7%56 1) * %%% 59<
7%57 & * %%% 59<
7%57%54 %%% 59=
7%57%6 %%% 59=
7%57%7-# %%% 599
7%5< - * %%% 599
"# %%% 599
%%% 599
: # %%% 69<
%%% 75<
# %%% 75<
! 331
0*6 343
!

!
"
#
"
$
#
"

2 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!
% &
'
# "
"
"
$ "
"
# $
"
(
(
" )*
"
+
#
# $ ,
#
" '
"
" $
" $
-
)*
. "
-

INTRODUCTION TO ENGINEERING SYSTEM DYNAMICS 3
)*
)* .'
)* "
$ / #
$
$
+$
#
-
)*
)*
)*
)*
)* $
)*
)* $
" $
$
0
)*
+
(
1
#
2
$
)*
,
3
"
$
+

4 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
)*
%
"
)* )*
)* ) *
)* ) *
#
#
4
" #
#
# "
5 #
#"
"
-

INTRODUCTION TO ENGINEERING SYSTEM DYNAMICS 5
! "
-
(
-
61 77''
#
89
:
"
#
1 (
)1 (* 5,
) *
1.1
(9)(+9*
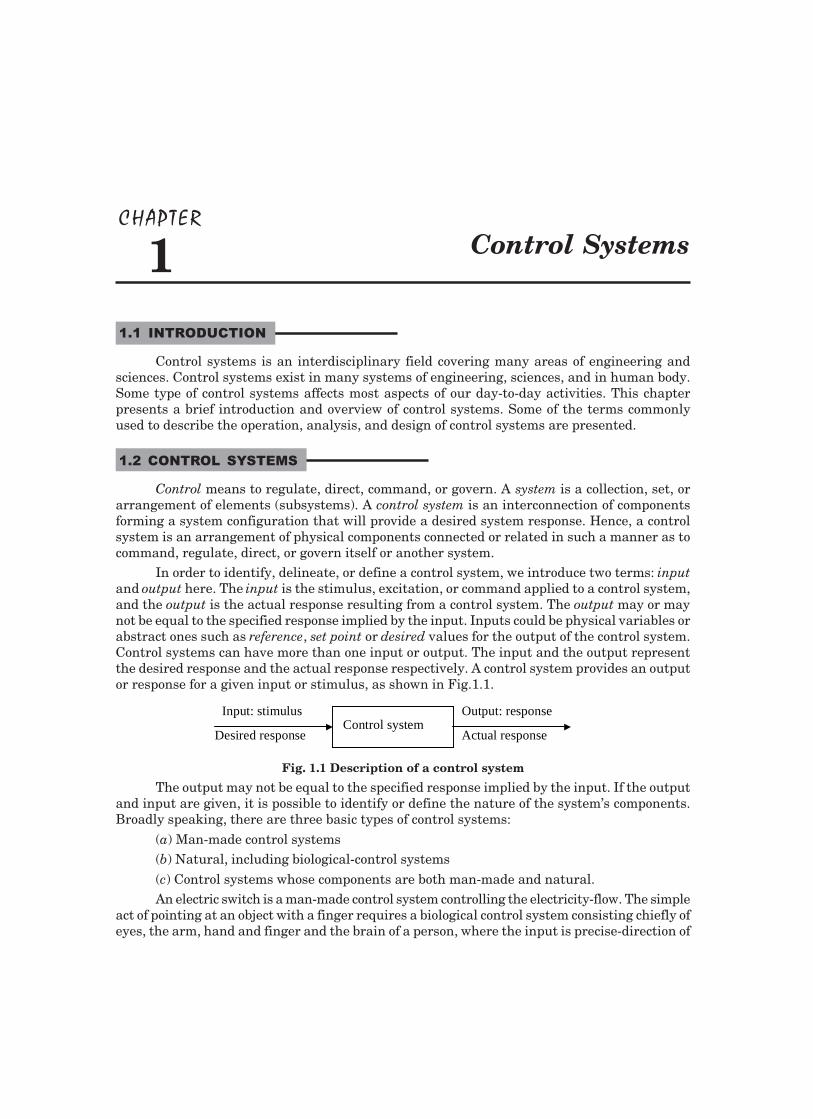
!
" #
$ "
%&&
Control systemInput: stimulus
Desired response
Output: response
Actual response
$ "
'
( ) #
*
+
, $

CONTROL SYSTEMS 7
,
)
%&-
Control systemObjectives Results
"
,
)
.
"
$ ,
)
! #
/
* #
0 $
!
)
1

8 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
! )
#
)
2 %&3)
Physical components
within the blockInputs Outputs
Block
) ) %&3
)
%&4
Mathematical
expressionInputs Outputs
)
%&5
Transfer functionInput Output
!"#
60
"

CONTROL SYSTEMS 9
)
) )
% /
7 $
0
) %&8
$%&'
) %
&9 ) '
(%&'
%&8 &9 #
:

10 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
1
;
;
;
! 6;
/
R – B + AR
B
A
+
–
+ R – B R + BR
B
+
+
R
B
+
–
)#
AA
A
ATakeoff point
A
AA
A
Takeoff point
*"
+ #
)
,# #
#
#&-.#
/
$ <
& )
) (
&0 1 )
)
/0 1

CONTROL SYSTEMS 11
.# "#"
2
2%
- 3&+ )
0 1
0 1%
0 40 %
, ) %
0 3&= )
0& )
)
5.# 5
"
#0 %&>)
"0 )
)
%&?
"5
"#
#
/
% )
)
)
! )

12 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
)
,)
?>8@%
! # "
2
$
$
%
$
$
<
$
$
$ "
)
)
$
$
! )
)
%&&A
67# 3&

CONTROL SYSTEMS 13
% )
% ) )
)
" )
$
%&&&
++
+ $
,
Control Engine
Speed
Nr
Error
N+ – +
T
N
''
)
#
" #
/
/
" $
/
% )
%
#
) %&&-/
1 ( )
; ! (

14 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
*6
/6
;
& B ;!&&
) ;"
; ! $ &B;!
&$ & ) ;
) &B;!
G
H
+
–C
+
–R
+
+
–BE
&
";!6C&
) <
* ; #
*; 6
∂∂*2*
;2;6
= *
= ;&-
∂* * ;∂; 0
#
*; 6
∂∂*2*
;2;6
&
& B ;!&3
( ;!
, #
&=
-*< #!
3 #
<
)"
(

CONTROL SYSTEMS 15
! !
" #
# $ % &
$! & ' !
( ) )*+*+,-./
) 0123*4(55(
#0,-..
!"6 * 3 *+*+,-/7
#( 89 93 :,--.
$ # ,--5
!% ! &' (/:;0*+*+,--7
"! ( -) 0123*4(55,

16 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
:;0*+*+(55(
#! $%" : *+*+,--(
&&! !' *) 0*< (557
&&! !'# *) 0*< (55/
&!()!*+%%!,!!" = 83 :,--/
(+!((%"-.! ) 0123*4(55,
(!%.!# 8*+*+(55,
( # ) 0123*4(55(
.&! ) 0123*4(55(
!$% ) 0123*4,-.5
! >) 0# *4,--,
/""* " :;0*+*+,-?-
/)!82 " 3)"3 @9(555
/+!*0-$ #) 0123*4,--?
! #=8*+*+(555
1-( #=) 0# *4,--?
1- =) 0123*4,--.
*222 #8*+*+,-.>
*&) *( #:< *+*+(55=
*!! /%" /) 0123*4(555
)! #/:;0*+*+,-.?
!#') 9 2 A 8*+*+,--=
./#(% :;0*+*4,--=
+( ) 0123*4,---
/&+&!$((
# ( ) 0123*4,--?

CONTROL SYSTEMS 17
!.( ( 8 2 *+*+,--.
! 03 8 *+*+,-.>
$ 	 ,-.-
'' :;0)) *+*+(55(
'&!#34#/-!#$4& :< *+*+(55=
'!%! !
./* ( :<*+*+(55(
. ) 9 2 #1B,-.?
#.-% "C);(55/
&(# 8*+*+,->/
!#01B,-.=
( #01B,-..
( ) 0123*4,--.
*!(#! 8*+,-.5
*!(( !* 8*+*+,->7
*!(* 8*+*+,-.>
*!(* &!( )8*+*+,-?,
&//'2/ #&)! 8*+*+,--(
&// :;0*+*+,-?,
-('# ) 0# *4,-.-
( ) ) ,-/=
&&! !'!'*) 0*< (55,
!#& ($% D1 )D,->,
! 1 )# ,-?-
! (+(./( +! 1 )# ,->7
! !1 )# ,-7>
! ( 1 )*+*+,->5

18 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
)!" ", (3#B: @9,-.?
# ( ( 9 A 2 < ,-.5
2:1 ,->-
<) *+*+,-7.
&)& 2" #: 3) ,-?(
( (2 6*+*+,--=
0 & ( !83 :,->>
#( ( 8*+*+,->=
#9,-75
"* % 0A3*+*+,->,
.&* ( )*+*+,->=
* : ):,->=
!) &" ) 3)"3 @9(555
*.** (B)<* ,-.-
-*( /:;0*+*+,-7>
!- # ) 0# *4,--(
!- #( ) 0# *4,-->
&&! !' ! *
:!<*+*+,-..
&&! !'* 0*< (555
!(( 8*+*+,--7
(-'&&! !'* )*+*+,-./
(( (2 !6*+*+,--(
(!%-( 8*+*+(55,
(!*#"") ( !) '( #*+*+(55/
(" !$ 8*+*+,-?7
(" !* ) #,-.(
(-!#*(!!* -'8*+*+,-.=

CONTROL SYSTEMS 19
(( ; 3,-77
()(( * "3,-?(
%. !:D0,->.
.*( 8*+*+,-7(
!. ./:;0*+*+,---
( + ( !8*+*+,-?=
! ) :;0*+*+,->/
%!. ) 0*4,->/
( 3)"3 @9(55(
2 ( ) 0# *4,-.-
#&) );) 0 E,-?-
#%/ # :;0*+,-7.
./!(." * ( 0 3,-.-
# ( 3 B 9 ,->,
.-!/%- =8 *+*+(555
!.% " * ! #D,---
(" ( :;0*+*+,--=
()( 2FD 2:;0*+*+,-->
!%/ )' #8*+*+,-=(
/.!*- !( #8*+*+,-.=
/#*%( ) ,->>
/+ (*!!'* *) ,->-
% &! 2 !6*+*+,--,
. (" 8*+*+,-/(
.-"( 2 *,-?-
.## <) ,-7,
.!)!#/! : *+*+,->?
.!)!#/# !( :;0*+*+,-.>
.!)!#/ 8*+*+,-.7
.!)!#/( ! :;0*+*+,-?5

20 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
.!)!#/), ) 0123*4,--?
.!& . 6 * ) *4,->(
.!*.( )3)"3 @9(55(
.!( 3 ),-=?
.+$ #8*+*+,->=
.*. :;0*+*+,-/.
.*#!1% : *,-.7
. &1" !:;0*+*+,-7>
&0)($/ ( !*)*< ,-.-
!"2(* 8*+*+,-.7
".&$ 8*+*+,-?-
+! * !( 9 ,-./
+( ! 9 ,-.-
+ * ! ( 9 9 ,-./
!- * : ),-.=
.*" !#1 ),-.-
*!) -'8*+*+,-.=
*! ) 1 ),-?.
*!&!!* ( #0,-.>
*!./#&!( &! ( +
( 9 ,->=
!'( ) - $3)"3 @9(555
!' 8*+*+,--,
&&! !'((( 8# *< ,--(
( ) ( 8# *< ,-./
( = 83 :,--7
#'/ 1 *+*+,->5
)( 2:;0*+*+,->/
% & 2 *+*+,--,

CONTROL SYSTEMS 21
! ( !",-.-
+ ( 8*+*+,->.
!!)*( !:;0*< ,-.(
!! ( =8*+*+,-.,
& 2 *+*+,-75
$ .$+8*+*+,-.>
$$. ! 7) 0# *4,--
$/(! $8*+*+,-/5
$!&0-) )#78*+*+,--5
$!&*0-!':;0*+*+,-/.
$!&* #<6 * *+*+,-77
$-( 8*+*+,->5
$.2!&$( " " :,->=
$ ! 8*+*+,-=/
'(( : *+*+,--.
'% 8*+*+,->?
'!#& !( 0A3*+*+,-?-
'3#- :,->7
#0 ( 2 *+*+,-?5
+( ! #0,-./
)$!&*0- )#78*+*+,--5
!) )6,8*+*+,-/-
!) )6(8*+*+,-/-
+&'( &( !:;0*+*+,--,

22 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
(/101$.
%
#!"5
#!-!-5
#5
-" 5 !
5 % '
!# 5 !
!#52!
+!5% % ="!%
#&!-5 ! ! $& $&
#&5 C
#&,!- !5 ! $&
!-6*75 % "ω ω * " ! " !
*5 ω% φ %
#5 !
&8# 5% "
&+ *!5 !
&,!*!5 !
#5

CONTROL SYSTEMS 23
#!!#8!5 %' %
,/ 5 $ &
,/ %#& 5
,/ 8# 5% ! $1ω&
,/ 5
,/ $"#!5@ ;$& 0$& ! $&;$&CG,H;$&0$&IJ K
!5
5
"!-! #5; ' ,$L,(M& !
.!#5 ! % ! % ! %
!#5 !% ! % !%
!,$! 5 !$ &
. 5 @$&
5
5
%!! 5
% 5 G 5 I $ & +$ 5& +$& K 5N5
1 675 $&
'!%5 !

24 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
#!5
5
8# 52%
!!# !-5
!!# 5 !
% '
%
8# "1#!!5 %
8# 5%
1#!!5
!-!5 % %
#.5
#5@% ,5
#!%675 ,5);); #% (56;6;
# 5! % 0 % %
$!5 % 75O
#!5 $@$ K&&' L
!-" 5
!- #!"!#!5
!-5 %
!-! 5
!-!!-5 $ &
!-!,,-)5
!# 52D !
!#,$! 9!!5 ∆

CONTROL SYSTEMS 25
!#,$! 5 !
!%#!2 5
!%#!-5 P
!%#5
!*5
!5%
!-)5 λ+Lλ++≠50 λ+
!-)#5
#!#!#!-5
#!#2 #59 9
6 752 $ &
-!!-!-5
8!!%!5 ! '
!-5 3$& +$&#$&L3$&K+$&
5
+ 675 $ & $ & $& $&%'
%#& 5 !
%#&5 $& "$&
%#&*5
%#&!-5
%#&5@!
%()5

26 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
# 5@
+*5
+,*(!5 !
!$"5 $ & %
8# !$#!85 ' 9 % %
8# $#!85 ' %
8# 5!
(!)8# 5% 5"$ ,&
(!.-!5 B ! ! % ω( K,.5Q
(!5
#!#5
2!)!) 52 !, ,!)!)#
22- 52 !, ,!-#
2 $#5
2 5
2%!! 5
2-!+&5
!#"":/+5 %' %'
/- 5 ' ' !!
/-+&52*,-+&
/-,/ 5 '!' !!

CONTROL SYSTEMS 27
/ #$"5 $ & % @$&
/ #$"!5 % ' %
/ 5 '' ' !
/+&52*,+&
/,/-+&5
/! 9!!5
/!%!!5 +L, 2
/! 5 C %
/!!!5 % % %
/#59
/-!!#.-!5 (5,5R;R
/-!!#*52
/ (!5@ !
/ 5$ & 0
.4,/ !5 ' ! !
. 5
.-!%!! 5 F
.-! % 5 ! % S
./ 5
.(!5: P

28 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
.5
.!#.5 % % $&
.9!1).5 ' $ &
.9!'"8# 5 % %
.!!*5' ! !
.!,/ !5 ! !
.! ,2 .! ,1 6.2.17 5! !$: :D&
.!)!% 5
.!)!%%#& 5
8# 5 %
5 %
-!)%#&5
35 S
!#5* :! *! : *
5 !
!!*5 ' ! !
!!,* 5 ' ! '
#!-/ 59
#!-5
#!-,/ (!5
%" /#!5#% % '
CONTROL SYSTEMS 29
!2 5
8!!!5 ! ;$&0$& !T ! % !) ! * K, STL)K* , ;$&0$&
8!!-6*75 % !
8!*5 ! ;$&! *%*%
8!%!! !!5*% ',J;0$& ! *%;0$&
1%)%!! 5 +$ 5& $& $ & 52 $& $ &
1%)% 5 G 5 I +$ 5& % $ & G 5 I
1%)5
1#)5@%
1 ,/ 5'
1 ,/ 5
1 ,/ $"#!5@ ;$& 0$& ! ! ;$&0$&
1 8!5@ %
1 5
1) 5 !'
1)5
*!-5
*!,#!9 !5%
*(!5
*5%

30 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
*&$!5 %
*&'5
*#1);15 !
*"#295%
*)8# 5 % K,.5Q
*.-!5 !% !
*'!%5 2 %
*,/-+&5 %
*,/+&5 % %
*,.-!8# 5% % %'" %
*,.-!5) %
*25 $) ! &
*!#&""*!5
*25
**# (675 @
*52*#
**5;$1ω& ;$1ω&
*"$"#!5 $ & $& % %'S$& $ $ &&S
*5$,&9 $(& %

CONTROL SYSTEMS 31
*,3. 5! '@$&!'@$&
*!!)%#&5)
*! %#&!-5 !
*#52*2#
*#5
*#!)! 5
* !5 $5O&$,55O&
* !,*,!)!)6*75 !
* !,*,2-6*275 !!
* !,*,2-,*,!)!)6*275 !!
*#!5
#!5
"#2 675
!)%!! 5%
!5 !
8# 5 % % $1ω&C3$1ω&
!$!5 % ,5-5O @ !5O,55O @,5O-5O
!&51 %
%5)
% 5
/#.5 % ,JB)$&L5B5
/#-9!5 '
32 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!!)! 5
5 % !
,/# !5! ! ;C$,J;0& B ! ;0!
,/#53! !
,+!%!! !!53!0' $,& % $(& 3!0'
",/ 5!
!!)! 5 ! ! ! %
!-$!5 %
!-+( 5 %
!!! $"!5 ! !
!-,2 !-,1 6217 5 ! !$2 2D& !
!&5
#5 0
#!"!#!52
%!! 5 '
%!!!5' %

CONTROL SYSTEMS 33
%,/ 5 ! 5% K,.5Q
% 5
!""!8!5 % x <=
8!5 ! %
" 5 %
#5!
'!%8!58 P% ! % % ! ! % !%
'!%%#&5D
'!%52
'#52F !
5$ &
, # !5 ! % %
,$!!.!95 $5& + $5&$& ≥5!#5
,5 '
, 5 $ &
#!5 ' L5 ≥5% 5
!-#!5
!-*!5 1 C
!5

34 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
$ 5
'!%5
5 $&
$&""*!5 $&
$!!5 %
$!- #!"!#!5 ! !
$.! !#!5 $& $K,& ;(,;=(;/=M;$K,& %
$ , 5!
$$!, 5
$$!!5
$! 5 J
$!!5
$! 5
$!,! !52!
$!,2)! 5 %
$!,'! 5 %
$!,' !- 5
$ 5
$,""5
$#5














!
"# !$%$&
'!$%$&(
)!"* !$%$&
$" !$%$&
+,-
!$%$& '
!$%$&
. ' !$%$& (
/
01
0- (- !
0!
0+
02 '
# !$%$&" (
( $-## !$%$&"
(!$%$& (
(
3!$%$&
"
!$%$& 4 (
!$%$&5 )
3 3 3
-
6
50 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!$%$& !$%$&!$%$& !$%$& 772+)77!$%$&
#3!$%$&
!"
!$%$&
8$
9$
: !( !( !$%$&
# $
2 ;7!$%$&
<=>8 <=>8
% $
# !$%$& ! !$%$&
& '
# " !$%$& !$%$&
( )!*+,
# ?
- .
" 4 "
/ )!)
,(
0 1!
!$%$& ( * !$%$&5 # $ %

MATLAB BASICS 51
23 '!
-
77 @
3 A@B *(9C9 $
77$@@D89?:E;7
$@
8 9
:
' 98
'!
) '! $!
$ F GF:@6
- H GH:@:
! I GI:@8J
K L GL:@9
% M GM:@:LG@8L9
2 N GN:G:@98G
!$%$& / "$ 99 9π
'! !4
) $!
5 *( 77:O8LP @O896
5 ! *( 77:O8LP8 @O89JOP89JOP8O
5 - 77:O8LP @O8:F8
5 ! - 8O 77:O8LP @O89JOP89JOP8O8

52 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
) $!
5 & O 77:O8LP @O8:
5 ! & 8O 77:O8LP @O89JOP89JOP8
5 ' 77:O8LP
@O8
5 )) 2
5 ! $
!$%$& 3 % !$%$& ( 9:9J
'!#5)
5) )
'* ,
* , 3
* , K!
4* , K
4! * , K H∞
)!* , K ∞
* , K H8 !3 8
* , K 6 *&7%,8 *227,8G !
* , ( 9P8J9J9
!* ,
!2* , 8 8
'!%$!4)
5) )
* , 2
!* , 1
!2* , &8
* , -3

MATLAB BASICS 53
'!& ) '!)4)
5) )
* ,
)* ,
* ,
* , H88 HπL9πL9
)* , H88 π
* , HπL9πL9
*7 , &L! Hππ
* , 3 9
! ! −−
)* , 3 9
! ! −+
* , 3
!
!
* , 3 F 9 8! +
)* , 3 F 9 8! − ,
* , 3 8
8
!
!
+−
Q Q≤8
'!(89444)
5) ) $!
* , K 779LG@:
4* , K' 77 8:LG@9
)!* , K 77 8:LO@:
4! * , K 77 H8L@H:
* 7, K 778:@9
* 7, - K8 77P@8
7H8 ;
H

54 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
'!-!' 4)
5) )
):* , ): 3 F "):* , 3 H "
!* ,
* ,
'* ,
!* , ** ,7 !* ,,+ Hππ
'!/ ) ")!'
; 8!
8F9 8F9F "8F"9
8F9 8H9F "8H"9
809 89H"8"9F 8"9H9"8
8
9
8 9 8 9
9 99 9
" "
"
+ +
F − +
9 8 9 89 99 9
" "
"
Q8Q 9 98 8 "+ 8
8I 8H "8= 8
$8@8F "89@9F "9
$ R G:!$%$&P :8!$%$&G!$%$&*!!!! # ( */3,
!$%$& - !$%$&' 96

MATLAB BASICS 55
'!0< 4= '!
< 4= '! )
K
Kπ
K (
4 K ('$ ∞
+ 8− /F8
-
>> - 11 ( ''
)!) K( (
K
98 ( "
'!24 = '!
)
)! K
)! 77 L 7
" %
" + '
# 98898O ( (

56 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
'!;9!!
5) )
! %
!" ,
! ,
! <
!4 % $
K
'! )4
5) )
" %
" % '
" %(((
)!
)! !&'
)! !!
!) % )!
!) ) )!
)!)
-)!)
)!4
'!# ) 4
5) )
" -
)
%
! %
S!$%$&
! !$%$&
)4!
'!%? !4
5) )
) )!) S '= S !$%$&
') &!$%$&(

MATLAB BASICS 57
'!&
5) )
) ( %
T!$%$&
-
$ L $( ( $ "&
0 8"3)
$
# 3*
!@DPH89HOJE
0 !3)
# 3*
!@DP?H8?9?HO?JE
0#
$( $( 3 *
@8 :
9 J
− −
!$%$&
@D8:H?H9JE
-
@O 9 P :
: O 8:
! ! &
− + −
!$%$&
@DHOI! 9I!FPI:I&?: OH8: E

58 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
0%
$ !$%$&
0%!4 =)
3/H 3
3/H 3
*
77 (@D9OH888JPH:88E
77 @R9/J
@OH888JPH:88
0%!4
98G
'!(!4
)
*@7, K
*7@, K
*@7@, K
*@7@, K
*@7@, K )
0& $!3)
$ $ KL
0( !$!
$ 3
0- !95)
- ( !$%$& 98P

MATLAB BASICS 59
'!-!94)4 !
5) ) $!
!*, K 77@DO69E?
77
@
A*, KDE 77@D9:J88?G8POP8E
'C @
9:J88
G8POP8
77'
@9O
*77, K 77@D:8?6PE
@
:8
3 6P
77@:9
@
:
6
8P
*, "%3 77%@D:98E?
% 77@%
@
:
9
8
*, "$
77@D8J:?9G?PJ:E
@
8J:
9G
PJ:
77@
@
8
9
:

60 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!
"
2' )4 )
'
* 9C:
@8:88 89
9:98 99
@8:88 89
9:98 99
"" "
"" "
F
8: 8:88 88 89 89
9: 9:98 98 99 99
" " "
" " "
++ + ++ +
2 < )
'
* /
@@8
"=∑
*7, #
2# !!)
*
/
*@
8
+ + *+
"=∑
2% =
2&B
$3 85
5# 3
, /
,@,@

MATLAB BASICS 61
2(B= 4
&3 (
@@,
2-
#!$%$& ′
2/
$ 3*9C9
QQ@8899H9889
!$%$& /
*, 3
20 =
!$%$& (
224 =
3!@! ! 3 -8
-8!@H8
,!@!@H8
U !@H8
#!$%$&3 /
!@M
28 =
3!@!! 3 H8
!H8@H8
!@ H8
#!$%$&3/
!@M
2$=!$=)
3
@λ 98
"C3 λ
λ ' $% $%

62 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
λ
! " #$
%λ% &
& ' ( &" "
)*(+*, " "
-! ""
-! " . " λ(" / / λ
(.!!# ! ! !! ()*(+*,! #0
-! !!!. !
(# ! !!. ( !#)*(+*,0
-! " $!!
1 # $ # $ #
!2"! ! #!
( # $ # $ # (" " (# " '
(# "0
"-! #! $$
"3 $ "
..! #..!$" $ !" )*(+*,!!!(4 !.

MATLAB BASICS 63
!
5 * 5 *
2 2
/ )! 6/ *!
7 ! 67 * !
8 +" 68 *"
9 3" 69 *"
"#$#%
(: . ")*(+*,#
& '" #%#
$# ( !
; "$ <<*=&>?@A
" <<
B
#! ; "$ << =&>?:C4&B@A
; $ <<
"
4
! ; "$ <<=$@
$ !
"" 4
"
>
( $ << =&>?@A
<<
( !
# ; "$ <<=&>?@A
" <<
4

64 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
$# ( !
; "$ <<=&>?@A
" <<
&>?
) ; "$ <<=&>?@A
" " <<
C
) ; "$ <<=&>?@A
" <<
"
?&>>
) 3 <<=&B@A
<<
)$ - ! <<=C?>@A
" (" << =B&@A
" <<$
C
$ - ! <<=C?>@A
" $( <<=B&@A
" "& << $
:4:
* 3 " <<=&AB?4A&@A
<<"
CC
CC
&CC
(! ! !! "!
)*(+*, . "

MATLAB BASICS 65
( "."=$@* " ( " #D"$
( $"$ $ (
+)
,) ( !
) E <<
:C
) E " <<$&
BC?C4C4B
) E <<&
>&4:&CC4:&?
>?&:?CC>:
BC>B&&C:
) E <<$&
4?&4:44
:4>>C&
) E " <<!>
!
CB>?&
-),)
)*(+*,E " #"
!()*(+*, E "
0
) E E
"
-)% E E .
"
*! " " !
0
#$$5$
5$5F5$
5
" $ !! " $
$F (%! " !

66 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
*"! ! )*(+*,G )*(+*,$
!!" 1 .
!$ !
CC5>B5?5
( )*(+*,$ "
<< $=C > ? @
$
C > ?
;
)*(+*, !!!" $
0
*$ -! "
!! ! $
(" $" #
)*3 " ( "
"
!
()*(+*, ! 0
H !! "
( " !A
!G !
'$ ! .
!$ 0
H !
"
(! "!
("!! ! " $*&;
" ! " &(
#&1 $""!$
<<$!"=C > ? @$
$
>4
( "!$.
!! "
<< =C>?@
4?C
B?B54&
B?B4&
?:?>5C&CC
?:?>C&CC

MATLAB BASICS 67
I
<<$=C > ? @
$
C > ?
<< $
4?C
B?B54&
B?B4&
?:?>5C&CC
?:?>C&CC
(!! $
(! 0$$5C" $5&$5>
<<$= C@A
<<"= & >@A
<<&"$$"
&
:&C
("! $
&= : &C@A$= C@
<<=%$@"&$$
%&>
*
* '(
" 0
) H" )
) ;" )
. !(*
( '( " $'/(
("' " &
. !0*
1 '($!!
1
1'1(
)'1(
)

68 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
D '1(
;)*(+*,$ &"2(2$'( &(2*
( !)*(+*, * ! ' $=@,' ! $ !
<<= & BAC ? > 4A: @
& B
C ? > 4
:
( ! ! ! !!
'
<<'′'
C :
?
& >
B 4
) ! ! 0
<< /'
& >
> >B >4
>4 BB?
<<'/
> &> C
B C4 >?
&> C4 >:
C >? B
("
<<= A& B@
& B
<<("
(
J
C C

MATLAB BASICS 69
2$ "
<<
&>&
C&>&
) ! !; ' !K' !2$ !/' !
! ) *
+
, - ,
. / 0
, 1 2
% 3'4 # )%
*(
(
+
5 (,-
#(
% +*(+,(
# 4 # ( # (
3#
<<=A&BA?>@
&B
?>
<<' => B A& C ?A @
'
>B
&C?
<< 5'
4B&
C4
44

70 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
<</'
? ? &
: &?
B BB
<<(7
(
? 4
B&&B
B?>
<<I+6 !
<<6′6
& ?
B >
<<7"'
7
B:B: C>B
>B? 4C> &?C
# <<8'′/′8
?:B
?&B
&?B
%<<975'7/,
9
C&CBC
CCC4
4B
'?&
/'>C?
! % % # ' % 3'
+
0 . : /
: , , /
. ; 2
( +
, . /
< 2 1
; / ,

MATLAB BASICS 71
3#IH" "
=B &A &A C >@
B&
&
C >
C:B:
&
4BC
C:B:
&
4BC
=$ @
?>& :?&&:C
?>&&:4B &:C
&BB &:4 4&&>
C:B:
&
4BC
!4 # $4 "4 & # # )% # %
$. : /$/ + : ;
.$, = /$. : $/ + 2
0$, = ;$. : .$/ + ,-
3#D
&
&
B C
− − −
'
C
>
&
$
$
$
*L,
**L*,
;L*,
L*,

72 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
<<= &A & AB C @A
<<'=CA>A@
<<$"/'
$
B
&
<<'/$
'
C
>
I*"
<<$9'
$
B
&
*! !!
"* ! "'!!"!. !
2! "' !
( -G " * $
-G "(" $!
$ "$;
;$
$ $ "
( ' ! # ( $ !
)*(+*, 2!8
5,)3*3$
* ! ;)*(+*, !
8HG( !-G.
1-G$ 6 4 >)$3?# M !$
!!( !
! !!! 8HG.
( !). # # 1
!! 1).
! 2!
)*(+*,

MATLAB BASICS 73
)*(+*, 0
, ! "* ! "
NO)*(+*, . G )*(+*,). $
"NO ; $
"NO $)*(+*, !
( F6 $ $
( " $!" $)*(+*,.
!
5-#3$
* ! ! -G
! ('$G'(
$ !
540#3$
( "" !
(" " !
(" "-G
&(" !$ !" -.
G !
5.6##,)
( !(!
#!#
(!
(! ! " !
"$ !
!" !P Q
<< =&ABC?@A
<< !
&
BC?
<< !P2!Q
2!
( #!#
(#!# ! ! "
(!
!.@ # # ! ! ! # )
4 4 ) + A,4 .4 /54 + A,4 .4 /54 B + A./ : /.4 /, : ,/4 ,.
: .,5 #" # " C% ! # ! # A4 D54 AD4 C54

74 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
3#1R !$A
IR !0!&H"
I 0
IR !$A
=/&&/A&//&A//@A
M )*(+*, .!. ). ). *2-;; )*(+*,* !
7-)'6
*!! ! . *! 8 ! !!3! ! $'. !!
)*(+*, ! (
-
- 0
S +
S +
< E
< E
T U
(! )*(+*, (
'
' 8 (
V *UH M! ! ';$
!0 V' $
% M3 M! ! ';$
!0%' $ $
T UM( M! !E" !!
!0T !(! $
!

MATLAB BASICS 75
76)%9)
((& ! )*(+*,
4
9) 6
W ; ! $"!
!
& +UM(T
B )!$H"
C *$2
? 3! <$S$<$S$$T
> +*UHV
4 +M3%
74"#'$#
()*(+*,. "! 0
)( "V'
( "%'
"T
+ )*(+*,. (B
.)) #%#
$# ( !
!$ "3 << 4$
!
<< 4$
3 " <<=C&>4C@
#3 <<
#;
$
" $ "Q Q <<'=&?B&@
<<'

76 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
! !
"#$%$
!#% #& '()*
%
!#%% #
#+# ()*
,-% %
.
/##- #, # +,!%!!0!%%/-((
123/ 43/23/
! "# $"# !" !"
% & ' ( (
)*+,-
5%%#"65/7589% "##
+, %# "#%9,#&
%
% , %:+,
;
<
%,
%

MATLAB BASICS 77
/#+ , "=
+ ,
%
#+ ,!#-"#%# % #+ , !#+# "&+#
)*!-
>"+ , =
;
<?
%,?
?
%
%
)**!,
/#" + ,%% #+ ,
@ -
;
A:?
A?
%
B# .%!-% %"##
+ ,- # #!#
% #,++
)*/01 2-
/#65/758#-# ,"## #
-9/#%#%## =
2
/# %,%+#+ ,
C< # , ##,-!+
# #
%%# ,- #!#
%%65/758%-,#/#%
%/-((.-"=

78 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
*
,
3 /# 65/758%2,%
,!3"#,"##,%
2%65/758 !"
#,"###
%
45 / %%,#+%
#1!# -%+C
/#65/758 %%/-(('-"=
/
565/758,-""-
% # %- # ,!;!;!!!
!D/#,,%+ %!
%% #"# EF
E F # 65/758!# E F!
%EF# 5C,%
EF
/#,%51G%H4-%-"+
,
' ! #
!% #"B# !
" -%-,,+#
# /# , #
!#% #
#/#!,+#+
-%-,#%-
6789
6::9
!;'<,%#"&
%

MATLAB BASICS 79
''
/# 65/758-9 "=
-9 -9 -9
% %
% EF!
EF!! EF!
(
-9 -9
% %
( E F!! EF!
-9
% #
EF
3 /# 2,4#
,"##3%"-%
I# #,#+
65/758 ""##
J $ B#, ! #J $%!
#, %!%# %,%
2 /# #65/7582,
2
-9 %+#
EF?
3 "# %E%F EF> ,!# +# %# - &% %+ /#!# # !',%# ##+#++--!%# % "# - = /# =')''''"# -+# # #+?%&+C!%)'''#-%%#+&

80 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
65/758#%#-%-(&G,!,!,%(&G,!&G,!#!% ,
)/) .>
/#-% ,%+,(&G,
!!J,$
"#
%+# &%&% ,#+,#
,,+#, #!&!%#,&9
/#,#,%#+# !(!##, #%:#/#% !&%9&,%/-(()
?,'.'3.
,. 1. 03.
" K % < ,+
+ KK %#%
= %% L 9
% K %#&% &9
+ + ,
- M ,+
"# C
-9 %%!
)/-:.>
/#,%+,# -65/758 (&G,/# %65/758 ,+ &%+/-((*
@1A.
I %,
I-+,#
I#-+,#
69%(&G,
I"+,# , -
69,
69 %,
2+,#%,-

MATLAB BASICS 81
69 #,
G" %,+ , %
2 +-
69#+
AA I,"#+-# %
69,,
69,%,
I,#
69%-& ,
69,
2,%
B= 2 %
69+%#+
I,
A 69+,"#+# &
A 69+,"#+#&
2+,#
2+,#
)/)
/##" ++,65/758!#=
2%
N%%
7%
>O ,O('#"# ,%%"# +!# #%+ ,%+#,%+& # +
C9+#%,%+ #,#+,#"%"5# ,+%-#,%%%%# +,PO ,O('
1 /#%9, ,KG "%-,:,,+>!#%= ! "# %% # + PO ,O('
)/DD.>
65/758,%, %,+#&%%/#%%"! !#,!+#6 - %#N,B%"%2+%G/-(%

82 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
D8D.A
,
D 2#&%+,# #Q #,&C !!%$--%+D''
A %"++ , #& !;'<6A'"++# %#, "&%&+%
'' %++# # %%#, ++%!% # %# #,!''",&%#&%,,+,# #,/#--%"#''-%
': # +%+!#" #-,+,+'%#,% #",%,%+,%"# ,-"##&% +!%:"%%"#% # +%"-
2%#&%,,%"+%" !,,%,+ !#+##9C/#, "- + " +#% %- θ %θ!"#
≤θ≤(π!#,% % "
C6;8)<59#6E:"-+!R! $%($!%''",%#%%& -%%-#?!
/# %#"#%#
3%#+#% + +P#65/758 &##,
A I#, #%+%%"+ +P#65/758 ##,
=2 =2'#,," #&%,/#" # + +EF-# ,"##% %# +%-+EF9&"%-#$ 8#+%+/#% 'ST%T
G#+#+ , #% & "&%#&%+,#%#" ! !! !$!$ !"##!%-%#/#%& -%%"#J$%J$5 "#+,%# +-"=
4B5 %+ %-#

MATLAB BASICS 83
,
4B5/#- %-# C
45#+% +
45+#+ !+ %"%"+
4A5 5#,%#+#, C#,%##+
/#''5% &"-%"5, #+ -% #- #%"! ,+!"%"&!%' + #+ !"%"# $'
D 2#% ''% C+#!D"%"!#&%%& !#+#,5 #+!,+#%--%#,!-%%% #"#
A A%%+% "&% #&%+,#?A#
G"EF ,"##
(
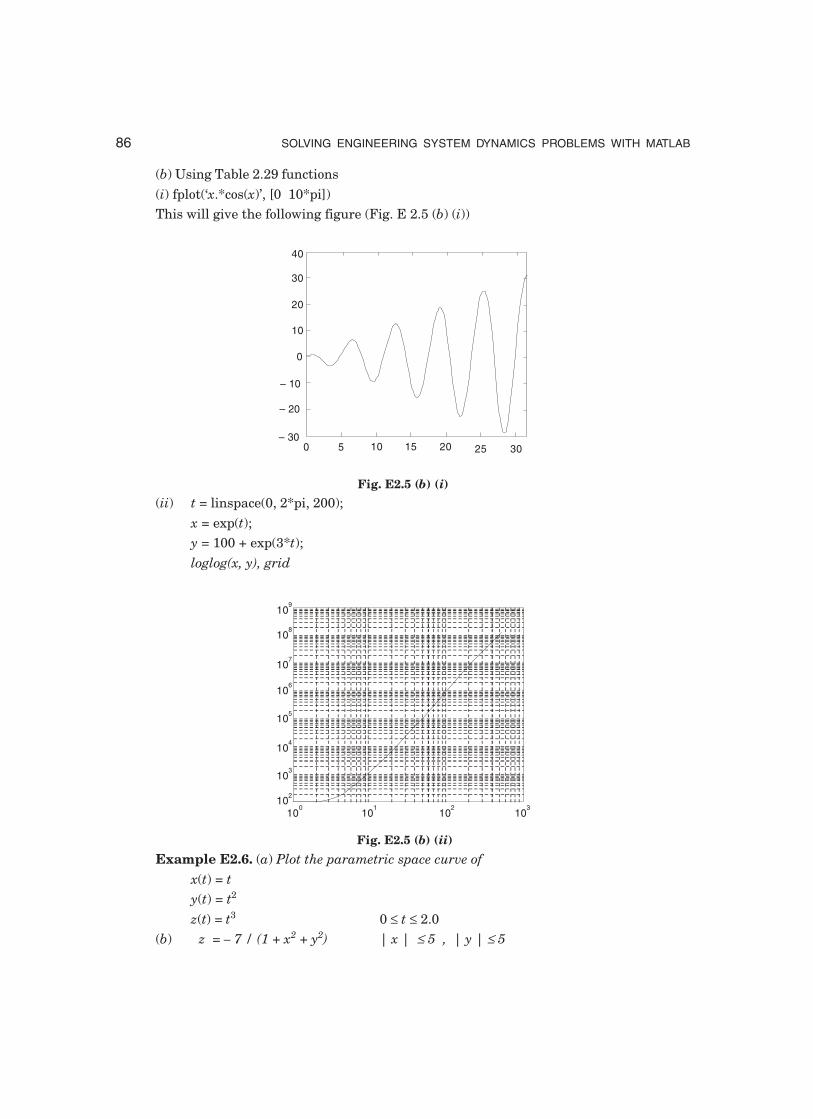
)*
+*
,*-,
, ./
0
0 ./
1
1 .
2≤≤+π3!#
!#
!#
!#3" "
!# !#*
2≤≤)2π!# *
*)22/,
2≤≤+π-
,
@+#,%
,!(L,!?

84 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
?(?
KM:.<M:(KM':?
,!!!(!JK$!!!J$
K
-J$
-J,, $
J $
!!J$
+ J7,, $
+ J&,, $
5
4
3
2
1
0
– 10 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
1-term approximation
sin (t)
Linear approximation
sin (t) function
sin
(t)
appr
oxim
atio
n
A
@+##%%
,!(L,!? ?
, !
#%
( ?, !(!JK$
K M:.< M:(KM':?
, !!J$
K
#%
sin(t) function
sin(
t) a
ppro
xim
atio
n
4-term approximation

MATLAB BASICS 85
5
4
3
2
1
0
– 10 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
A
@+#%
,!(L,!?
?
(?
KM:.<M:(KM':?
,!
!(!J$!JK$
!!J9$!J$
K
-J$
-J,, $
J $
+%J$!J,, $!J'#%,, $
5
4
3
2
1
0
– 10 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
sin (t) function
sin
(t)
appr
oxim
atio
n
sin (t)linear approx7th order approx
t
A
sin(t) function
sin(t)
sin(
t) a
ppro
xim
atio
n
86 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
3+/-((*
,J L $!L,
/#"+# "+ +>+O(
40
30
20
10
0
– 10
– 20
– 300 5 10 15 20 25 30
A
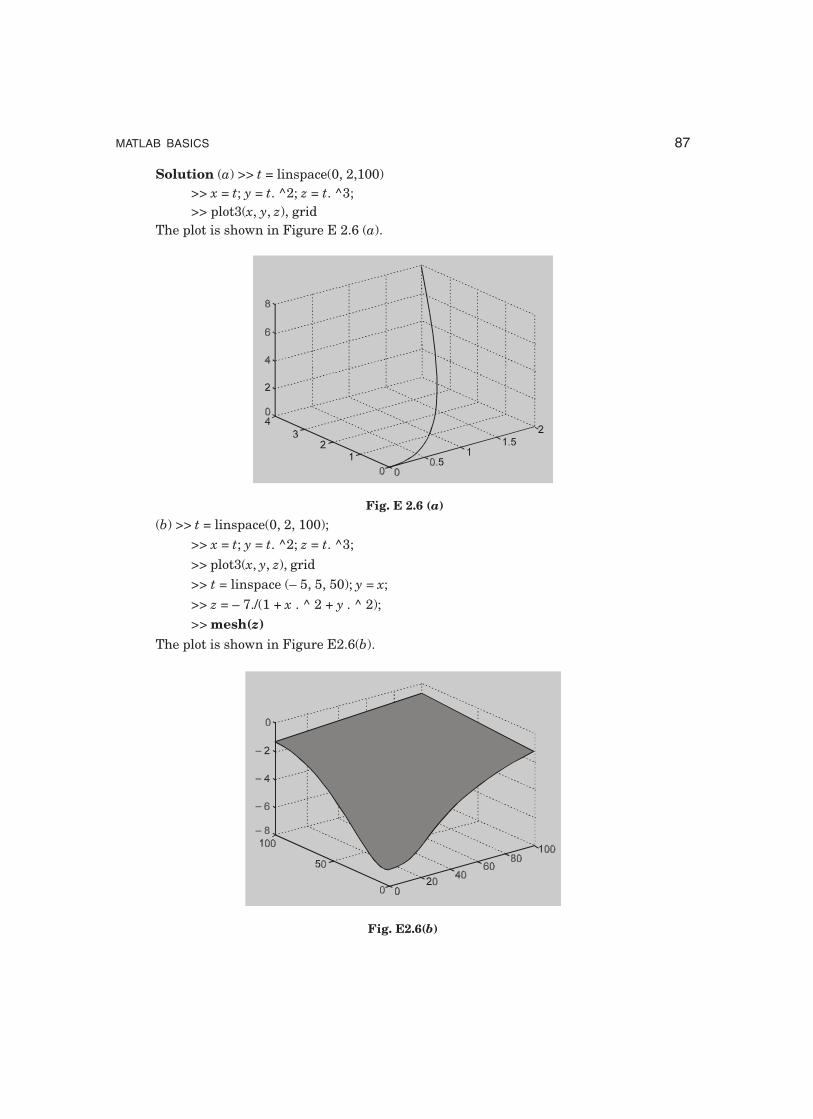
,!(L,!(?
,?
< ,L?
! #
109
108
107
106
105
104
103
102
100
101
102
103
A
*4"
(
$ ≤≤( $*-15!)/ +/+# 6 6≤066≤0
MATLAB BASICS 87
-,!(!
?M(?$M?
, !!$!+%
/#,#">+O(.
A *
,!(!?
?M(?$M?
, !!$!+%
,K!!? ?
$K':< M(<M(?
/#,#">+O(.
A *

88 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
)/+-=A>AF
/-#%, +,#!,#I%B%" #+,#,,#>+B%"/# +-%, % #2P,O,%2P,O2P /#%+,#
K%,K,
"#%, 2P,,%# "+/-(
D)=>-
= =
89%"#2P, 89%"#O2P>
I2P, IO2P>
7(8B2P, 7(-9%"#O2P>
7(2P, 7(O2P>
65/758++,# # "+,, +#
G 5%-
GHA U2OV+
G ,%/>>+
G 6& "#+,##%
#!", #-%65/758 %&+% 65/758 !"+#-,%65/758#
)?)-
/##65/758%",% !"%# # +65/758,+/#65/758 %&%/-((
D01 I
I + 65/758" 65/758
6J$!?
"#! !"-%,++#(B# ! K%8## %#,%+%+C/#,%- +#, "### -"!% !,,%%!- #P%=
, 0A
45 %
425 "
4J5 %%"
4J5 %%,,%
/#,# #-++

MATLAB BASICS 89
G #,+65/758,+/#'"# # " # % -45"
%,% /#
6'789:;<
"#78, #, -+!"#"# ,! #+% #+ #% !%,&9:;<%#"C-%%#"#-+%# 9:;< %!# %/#78 %+%+C, +# #-# /# #-#%-,+@! "%- +! +&,-"#"# ,8"#,+% # ,%!+, +# "%# # %
B ,,%
'78!
"#%78##+ '"## ,&# , #+%"#W!%++#% ,
P(()!#,- 65/758 ,#-%-%# 65/758$,- -,"-,%P, !#- ,!-+-!, #& ,!,- ,! +C +-C!% C!% %+ +65/758,%
)@)-
5- ,%65/7585+C9%% #- ,>=
J: $?J M<L M<'L M(K'$
/#%,%- , %%% +& %,%-, %!#65/758",9B#- !65/758",9##+" , % =!"## ,#-
/#%,%-%-# !
= #%,%- #- ,
> ,=
=
JLL<$
J: $

90 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!
" #$$
#$%& #$'(
) #$*
+
,
)
-
-
.
.
/0
+1
2
3
"
/
+ 1
. 1
!
"
4
5 .
6
6
7 /
7
8
8
9 0
9 0
: +1
: /

MATLAB BASICS 91
#
;
/0
+&
(
+
"
+6
$ " %
&$ " '
$ " (
)$ " 0*
$ " +
,- ./0
. <<
< !
&. <
<=>
&,$1.< ,$1$
<&0 0!
&&:<?:?( . <
20323
< 0
0
7 #7# <@
#
#
4'
4$=A
0&>(=> &>(=B
<0!
=&:#=5'65$64A?:&>(=>?:&>(=B?(
) #$A

92 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
4
/0
& .<
&
& . <
,-5
0
!
/0
$23/0
$/0
$23$/0
0) #$C
/0
$23/0
$ $/0
D E0
$ 23$ $/ 0
D E0
$23$23/0 DE0
) #$C#%#
6
5
2
F
.
MATLAB BASICS 93
-
7 8"
9 +
9
9
9 +
9
9 ,
9
9 "
9 .
9 +
/
:
5&
+ 1
+
.
,
;
9 G
9 G

94 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
<"
2
+
,
&
F
+
= H
/0
& .
0
I
&(7 &(0 &(&(00 &(7 &()&(7 &(
0
&(7 &(0!
& (
& (
=
=
B
B
&B( &#( & (
&B( &#( & (
−
−+ + ++ + +
0&B(≠>0&(7 &(
; =D&B( &#( J &(E
=D&B( &#( J &(E
$$>$
0&( &(
& (
& (
=&(4
&B(
&B(
−4
&#(
&#(
−4J4
& (
& (
−

MATLAB BASICS 95
?$@>$$$0
H&(7 &(
$$ 23 7
0
:,A B7'
?$$@> 9$)
&(7&(
)K0
7!
?$@>9 $$
?
<
,,A
0
&..L(
0
&(=B
> B B
B> B B
−−
−−
+ + + ++ + + +
0
&(= B #
B #
& (& (& (
& (& (& (
− − −− − −
0
= 4
=4
, C5&
) #%$

96 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
C&
A 7
+
"
.
9 .)
9 )
9 G
9 G
DAE
&(=B
> B B
B> B B
−−
−−
+ + + ++ + + +
&(= B
B
−4 #
#
−4J4
−4&(
?$$@>$20
AE <
′= 4=4
&(=B
> B B
B> B B
−−
−−
+ + + ++ + + +
0!
?$@> $$$$ +
0$
$$$
<0
B
9AE 9<
′= 4=4

MATLAB BASICS 97
)
&(= B #
B #
& (& (& (
& (& (& (
− − −− − −
!
?$$@> 9$$$$2))
0
< 0
B
AE
&(=B
> B B
B> B B
−−
−−
+ + + ++ + + +
<
′= 4=4
!
?$$$@> $2
<
0
9AE 9
&(=B
> B B
B> B B
−−
−−
+ + + ++ + + +
)
&(= B #
B #
& (& (& (
& (& (& (
− − −− − −
!
?@> 9$2)
) 0 $
9 AE9 )
&(=B #
B #
& (& (& (
& (& (& (
− − −− − −
&(=B
> B B
B> B B
−−
−−
+ + + ++ + + +
0!

98 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
?$@>9 $$2
0
)
)
)
)
9 AE9 )
&(= B #
B #
& (& (& (
& (& (& (
− − −− − −
<
′= 4=4
!
?$$$@>9 2$
<)
))
)
0
&(7 &(0!
& (
& (
=
=
B
B
&B( &#( & (
&B( &#( & (
−
−+ + ++ + +
0&B(≠>0&(7 &(
; =D&B( &#( J &(E
=D&B( &#( J &(E
>$
0&( &(
& (
& (
=&(4
&B(
&B(
−4
&#(
&#(
−4J4
& (
& (
−
?$@>$$0 H&(7 &(
$$237
0

MATLAB BASICS 99
A B7'
?$$@> 9$)
&(7 &(
)0 7!
?$@>9 $$
/7
// 4
&(=& (
& (
! "#$%&'(&)*&%&(
&(=)&+%&'(&)*&%&+
&(,"-./#0"-)#0"-(#"-.#
&(,"-./#0"-)#0"-(#"-.#
&(,"-./#0"-)#0"-(#"-.#
&( MM=DB*'%$E@N=9%4*9$4'9#4%4$
MM=DBA*'%AE@N=9'4A9%4*9$4'9#4%4A
MM#=&D5B>E(
#=%%*$
MMB>=&D5B>E(
B>=%%*$
MM'=&D5'E(
'=5BA
MM$=&D5$E(
$=5%'
MMB=&D5BE(
B=5B
&(MMB>=&D5B>E(
B>=5$''$$
MM'=&D5'E(
'=*B#
MM$=&D5$E(
$=#>#
MMB=&D5BE(
B=C
&(MMB>=B>7B>
B>=5>B#'*
MM'='7'
'=5>>#AC

100 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
MM$=$7$
$=5>###C
MMB=B7B
B=5>B#'>
// 61
"#$-/+ω! !$.)20/≤≤.)3 4/.
MM=D>!>B!B'E@
MM!=B'@
MM=&5>A6(6&!6(@
MM&(
MM&:&(=99>99A98?(
MM &:?(
MM &:?(
1
0.8
0.6
0.4
0.2
0
– 0.2
– 0.4
– 0.6
– 0.80 5 10 15
y(x) = e sin x– 0.7x ω
x
A / 6
// -1
"#$-/'ω! ω$./20/≤≤.)3 4//)
MM=D>!>B!B'E@
MM!=B>@

MATLAB BASICS 101
MM=&5>*6(6&!6(@
MM&(
MM&:&(=99>99*98?(
MM &:?(
MM &:?(
1
0.8
0.6
0.4
0.2
0
– 0.2
– 0.4
– 0.6
– 0.80 5 10 15
y(x) = e sin x– 0.6x ω
x
A / -
// ,:3 45**6 !
&(*$)(/≤≤*π&(*$)(/≤≤*π $0$
&(.$-*/≤≤*/
*$*
&($& (
-)≤≤)π
&($-(2)/≤≤*π
&($-.
(*&*&*
77≤+077≤+
&( =&>#6#>>(@
=<& &'6&$6(((@
&(
y(x) = e–0.6x cos ωx

102 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
12090
602.52
1.51
0.5
30
0
330
300270
240
210
180
150
2
1.5
1
0.5
0
– 0.5
– 1
– 1.5
– 2– 3 – 2 – 1 0 1 2 3
!
""
#
#
#!
#!

MATLAB BASICS 103
0.08
0.06
0.04
0.02
0
– 0.020 2 4 6 8 10 12 14 16 2018
0.5
1
1.5
2
2.5x 10
17
0
exp
(– 2
x).c
os (
x)
exp
(– 2
x)
!
$
%$
&%
8
6
4
2
0
– 2
– 4
– 6
– 8151050– 5– 10– 15
x (rad)
cos
(x)/
x
! '
(

104 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
0.6
0.5
0.4
0.3
0.2
0.1
0
– 0.10 1 2 3 4 5 6 7
!) )
*+(&#%
! ,--,
100
50
0
0
5050
100
6
4
2
0
– 2
– 4
– 6
– 6 – 4 – 2 0 2 4 6
! "
#!
$
%
&&≤'()&&≤(

MATLAB BASICS 105
!"*
')'+,
#'-%.≤≤%π
'+%π#,$
≤#≤/≤θ≤π
!) )
*+(&#%
!,-,$
1
0.5
0
– 0.5
– 110
50
– 5– 10 – 10
– 50
510
#$!
(#%
#,$!
106 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
25
20
15
10
5
0
– 520
100
– 10– 20 0
510
1520
t cos (t) t
e 5
– 1
t
#* +
#-
"%
1
0.8
0.6
0.4
0.2
04
20
– 2– 4 – 4
– 20
24
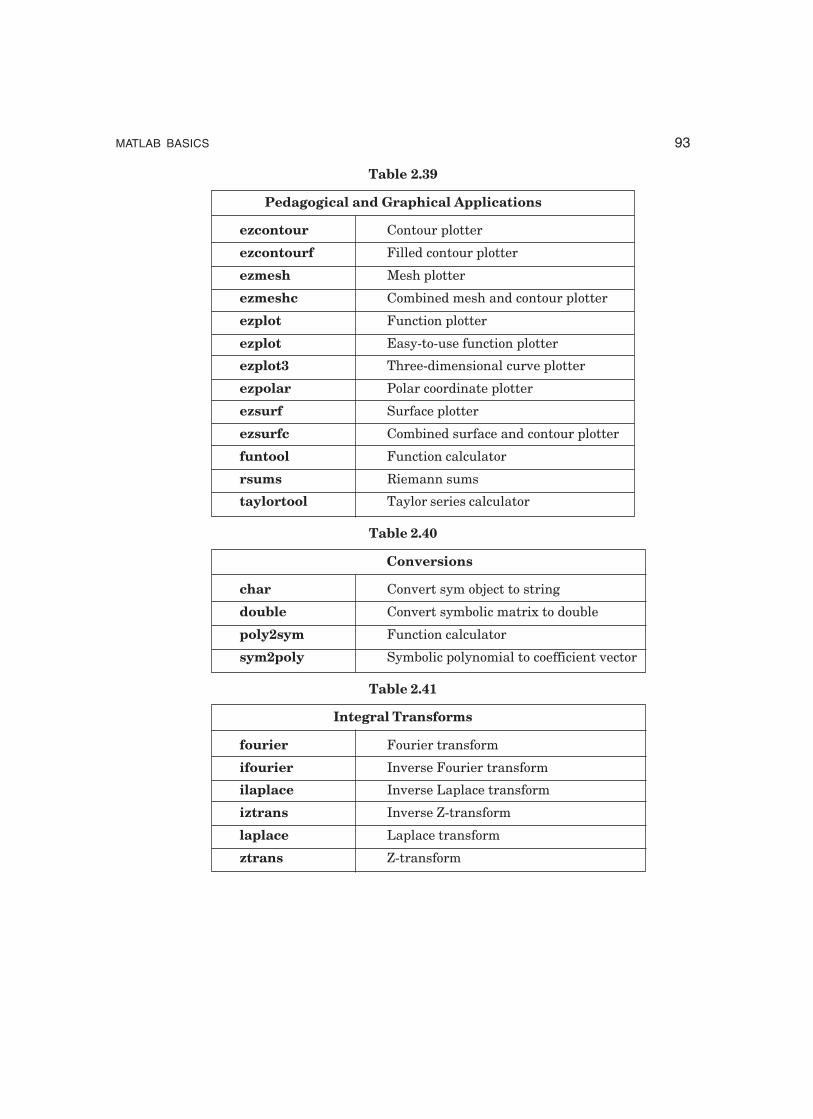
0 ≤≤1π"))#2 * "3
=
==
.
#

MATLAB BASICS 107
45
//* '+
//
//
//# .
//#0%&
//#%
//##
20
15
10
5
05
0
– 5 – 5
0
5
z
yx
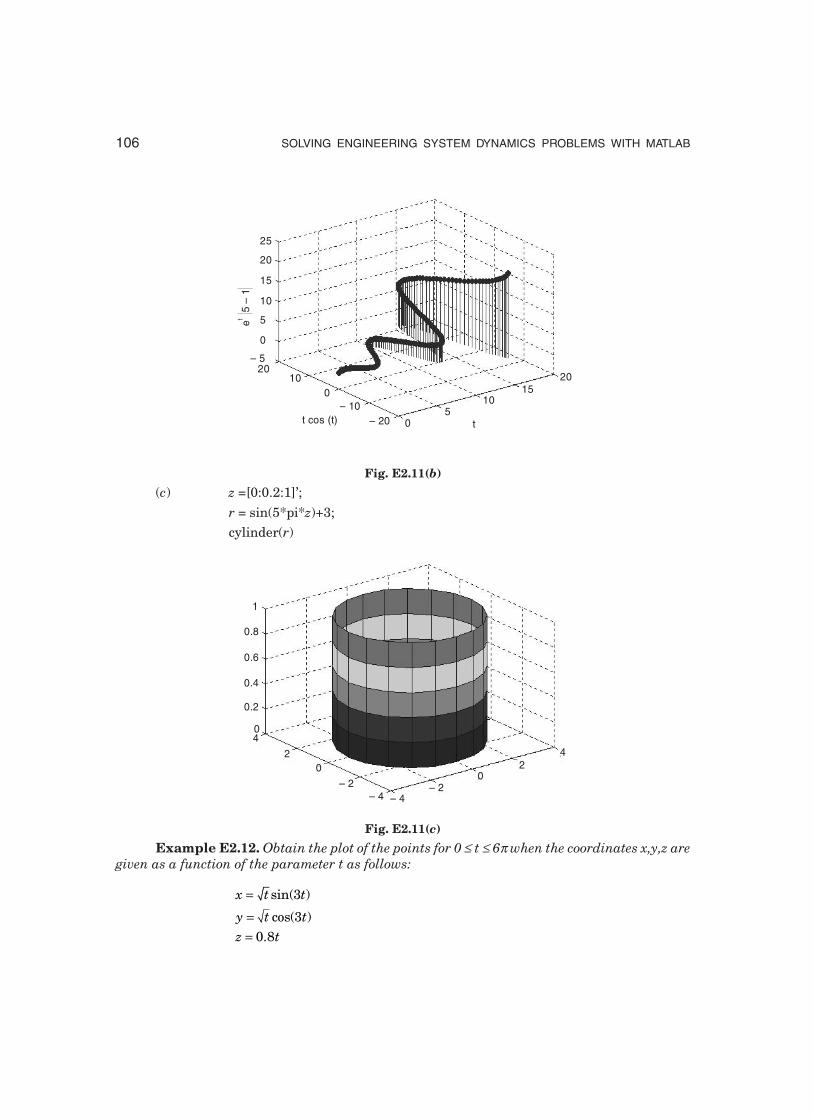
0* #'
$ 2
*.≤≤1≤≤6
47
! '
// .
//*+(&#%
//#,$,-,
//(&#
//##
//#
//##

108 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
10
5
0
– 58
64
2 – 20
24
6
z
10
5
0
– 58
64
2 – 20
24
6
8 #' ! / % $ +,+%,2*.9≤
≤9.9≤≤9
7
:
7
7
:
478
//!1 1
//!1 1
//*+(&#%
//#,!,-,
//(&#
//
//##

MATLAB BASICS 109
0.4
0.2
0
– 0.2
– 0.44
20
– 2– 4 – 4
– 20
24
z
xy
4: 8
//!1 1
//!1 1
//*+(&#%
//# ,!,-,
//#
//
//##
0.4
0.2
0
– 0.2
– 0.44
2
0– 2
– 4 – 4– 2
02
4
z
y x
47;8
//!1 1
//!1 1
//*+(&#%

110 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
//# ,!,-,
//(&##
//
//##
47;8
//!1 1
//!1 1
//*+(&#%
//# ,!,-,
//(&#
//
//##
0.4
0.2
0
– 0.2
– 0.44
20
– 2– 4 – 4
– 20
24
z
0.5
0
– 0.55
0
– 5 – 5
0
5
y
xy
y x
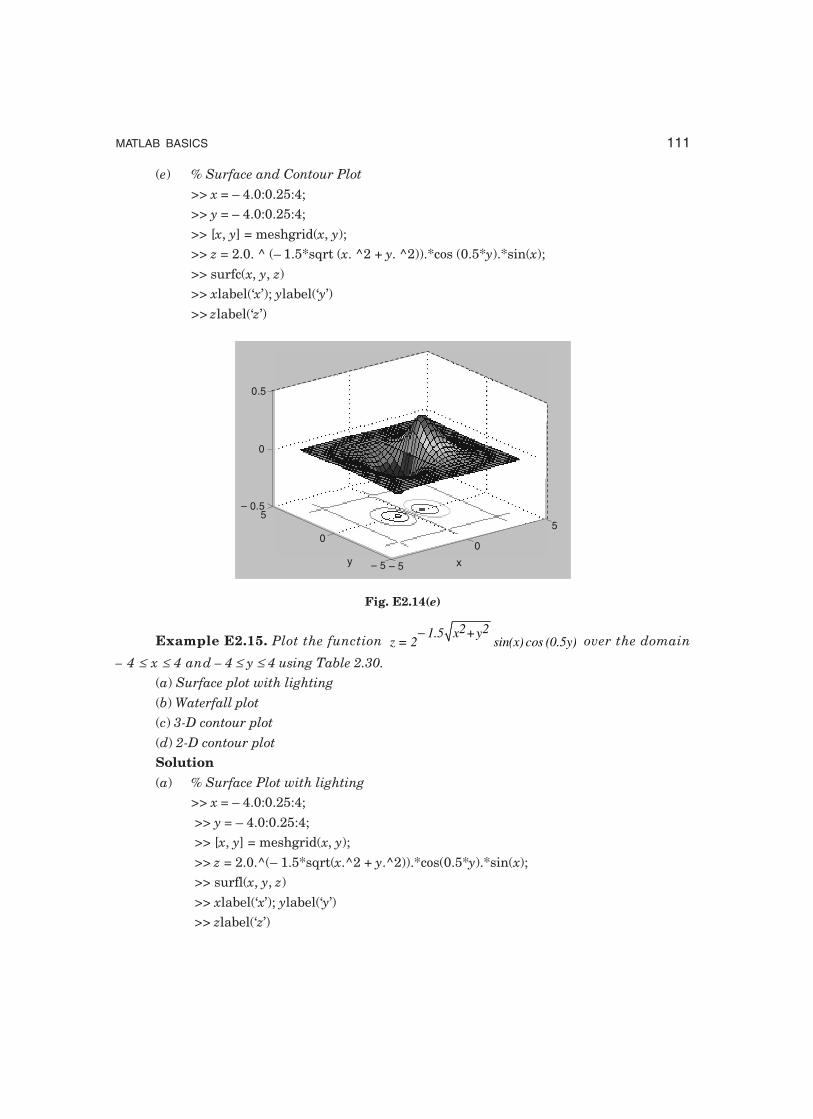
MATLAB BASICS 111
4: ;8
//!1 1
//!1 1
//*+(&#%
//# ,!,-,
//#
//
//##
0.5
0
– 0.55
0
– 5 – 5
0
5
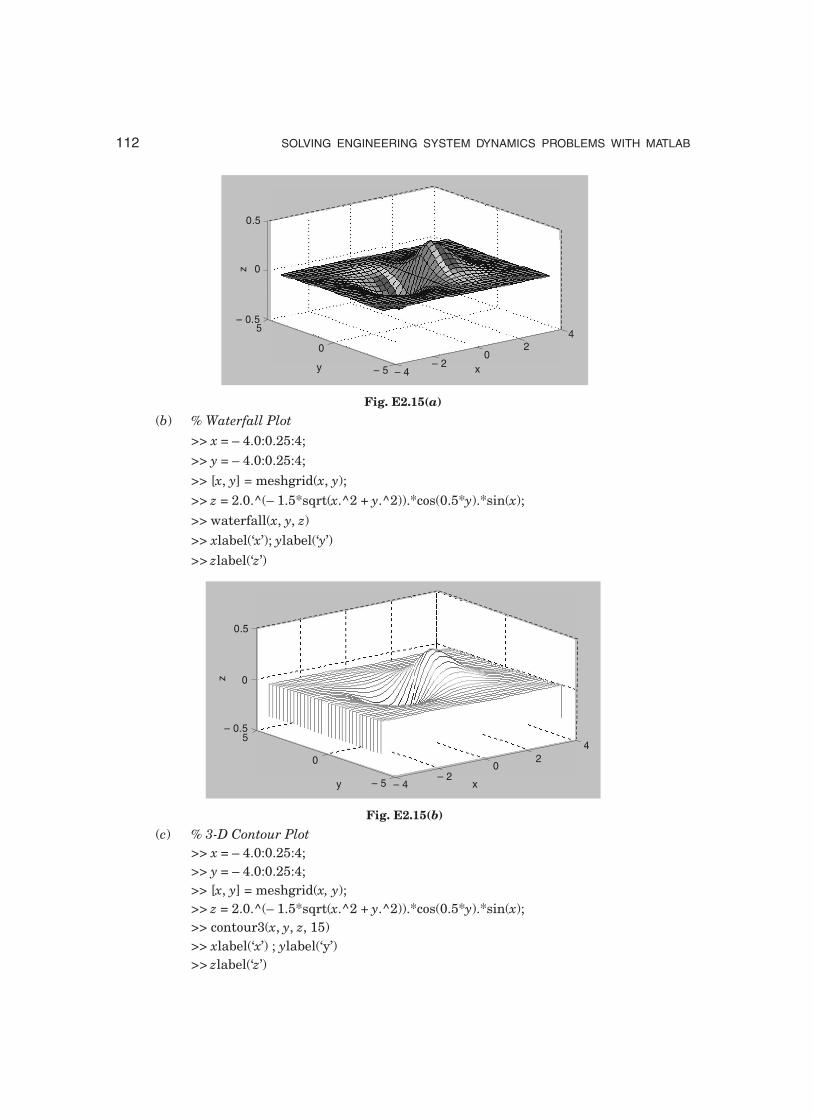
8 − 2 21.5 x +y
z = 2 sin(x) cos (0.5y) 2*
.9≤≤9.9≤≤9
: "
<
!
!
4: 8"
//!1 1
//!1 1
//*+(&#%
//# ,!,-,
//#
//
//##
y x
112 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
0.5
0
– 0.55
0
– 5 – 4– 2
02
4
z
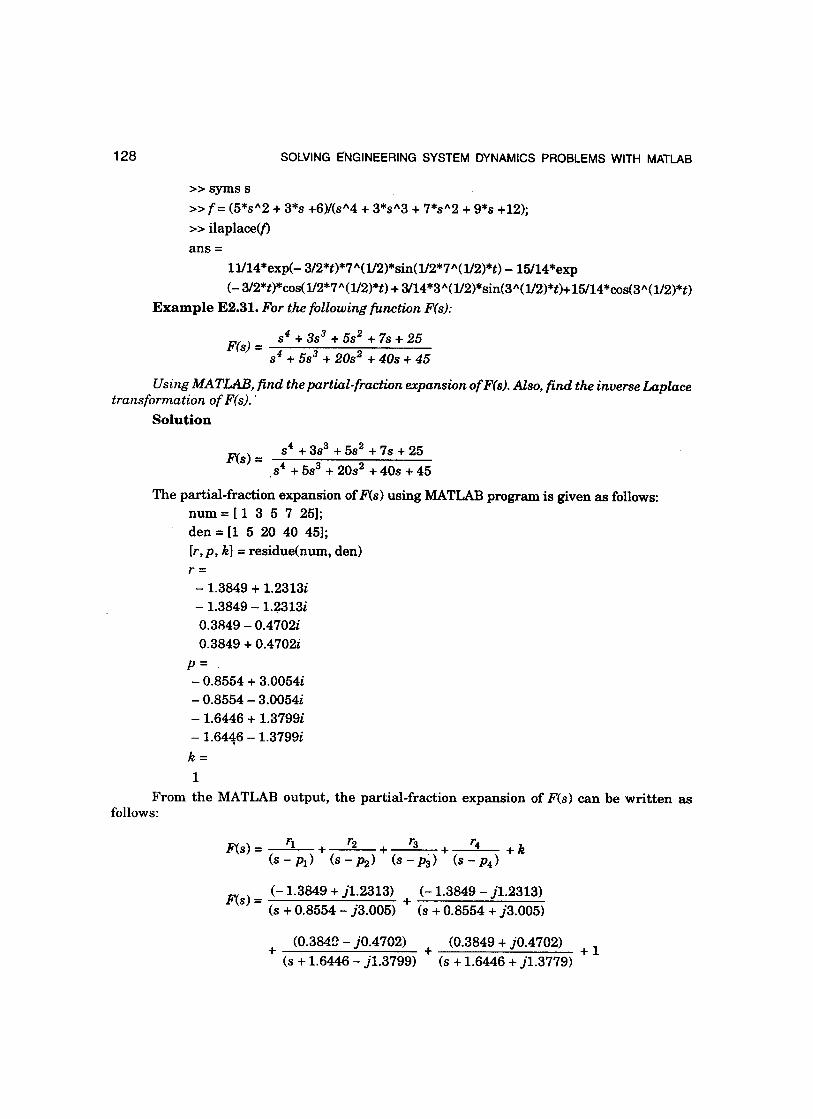
4< 8
//!1 1
//!1 1
//*+(&#%
//# ,!,-,
//0#
//
//##
0.5
0
– 0.55
0
– 5 – 4– 2
02
4
z
y
4 !;8
//!1 1
//!1 1
//*+(&#%)
//# ,!,-,
//#
//"
//##
x
y x

MATLAB BASICS 113
0.5
– 0.5
0
42
0– 2
– 4 – 4– 2
02
4
z
y x
!
! "
#$%#&' #$%#&'
#$%#&'
4
2
0
– 2
– 4– 4 – 3 – 2 – 1 0 1 2 3 4
y
! "#
$%& '≤≤('π)!& '≤≤π&!& '≤≤π&!&*'+ '≤≤π&,-
& '≤≤π&,.
& '≤≤π& '≤≤*π

114 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
//()# & ')
40
20
0
– 20
– 400 5 10 15 20 25 30
0///
#!)$)
*)
#
8
6
4
2
010
– 610
– 410
– 210
0
0///
#!)$)
# +*)
100
10– 2
10– 4
10– 6
0 1 2 3 4 5 6 7

MATLAB BASICS 115
//
#!)$)
*)
*)
# #
103
102
101
100
101
102
103
//
#!)$)
$%,!-
!
$
$*)!(
1.5
1
0.5
00 0.5 1 1.5 2 2.5 3
//
#!)$)
$%,!
!
%$
$*)!(

116 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
1.5
1
0.5
00 0.5 1 1.5 2 2.5 3
///
1#!)$)
1!1
1
10
5
0
– 5
– 10
0 5 10 15
"/
2
,
*3 (' + 3
π
4
-3 ) (*3
(5π
62724!/"#
2+4
24
2
2
4)(
42

MATLAB BASICS 117
2+4)24
2,) 33
4-33 ).
24
$!
,-/.,
/.,.
24
$!
,0.,
-.,..0/
2
$!
0,0./.....
--/0.0-
!12
$!
0-0-
.00/00.
4
$!
.-/.
.,.
!14!12
$!
,0,..
./--
2424
$!
-0..,.,-,./
-.0/-/
8"/62724#
, '
) ( -
* .
) . *
- ) ( 9
, -
) ( ) *
. , -
- ) 9 (

118 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
#$23#$4 5)$
2, - 0 26)$)$$$* #"! # !)$$
$* 4
4 -/ ,- 26)$)$$$* #"! # !)$$
$* 4
,- -/ 26)$)$$$* #"! # !)$$
$* 4
!12 27!!1 (#$*
!14 27!!1 (#$*
!127!!1 (#$*
28!1 (2
$!
.,,...
.,/--
/../00
28!1 (4
$!
--,-/
//0.
/,,-0
28!1 (
$!
//-,--
//-0.
//-0/-
//262724
2
–
–
4 1 5
2 1 3
6 7 9
2
3 5 7
2 4 8
5 6 10
2 , /-0
2
,
/-0
29!1$#" (2
( $

MATLAB BASICS 119
2
$!
.-0
,
29!1 (2
:2
:
-0.../-,0
,-,0,0/0/--
--..--,0
.-0
,
2
,-
.
/
29!1$#" (2
( $
2
$!
-/./
,0//
,0//
29!1 (2
:2
:
3 #"!
,-
.0,
--
3 #"!
---
--/0
,,-.,,

120 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
3 #"!,
---
--/0
,,-.,,:
3 #"!
-/./
3 #"!
,0//
3 #"!,
,0//
/62724
–
–
3 0 2 1
1 2 5 4
7 1 2 6
1 2 3 4
– –
1 3 5 7
2 1 2 4
3 2 1 1
4 1 0 6
62724 /
29$*;<24
2, -/ ,
4,- , /
24
,-0
,//
,,,0.,
/
=!
0./
0/
,0
/,0

MATLAB BASICS 121
9!1 $
:
:
,/,.,0.,,
,/0-,.--./0
././/-/00/
,.0/0./
0./
0/
,0
/,0
0"162724
(++,,+*.&(
)(+*+-,).&(5
*(+-+,)*.&*
)(+,)-,+-.&,'
(++,,+..&5
()),).&),
(),+.,)..&5
(+),,+..&)
2, -0 - ,--
4 . ,
02>4
0
.0.0/
.
,.
,/.
29( .0.0/.,,.,/.
2, , ,
4. , .
02>4
0
29( ,

122 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
///"#
0(&.
0&,,
*
0,&*,)-+,+9
+
0*).
((0
$!
.-*).
0,,*)
((0
$!
0*)-*)
0,,-,/
((0,
$!
,
62724;///"
'-
'<<∫
- '
π
+∫
-*)9.+((,+.+5+
+
0
!0-
$!
0?

MATLAB BASICS 123
0 -
!0)
$!
-?,),
0,
!0,
$!
?,,?
!0,&'&'
$!
?,,??,,?
!0,-
$!
-?-??-?
0-/,.0
!0
$!
-?///???,,0
6
!0
$!
!
="1#
&*)9
+,
+&'
&2,
2&2,
#1&/'
$!
?/?,/*)/

124 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
#1&,'
$!
*)??,*)??,
#1&2,'&'
$!
?2
#1&2,'&2'
$!
?2,
/"1
- -
π?
,
,
#1&-'&-'
$!
---?
#1& '&)?'
$!
$$!
#1&*),>'&'
$!
*),*)*),
#1&,'&'
$!
-,*)

MATLAB BASICS 125
?1
+-
+*&5$% ≥'
62724 /!
$%"
$%"$'%&( $'% &
4!$##!$# ! !$@
#1&-.'&'
.?.?*)?-0?*)?-0?
4!$!
#1&-.'&'&'
.?,??00?*)?-0??0,0
?0?*)?-0?
?1
+(
+(*&,* ≥'
62724 /!
$%"
$%"$'%&' $'% &(
4!$##!$# ! !$@
#1&,'&'
-?,-?,3*)/?*)/?
4!$!
#1&,'&'&'
-?,-?/,??*)/??/,0-?
?*)/?
8"/62724
2
'
,
, ' (
−

126 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
2 , ,
!12
$!
??/?
??,?
,?/??
@ "8$% 62724/7 /8$%
8$%. ,
(
+ * + -
62724 // "#
-
A"
/.
/.
0
.//
.//
A
27 $% 1A=9B=C ")"4$1( ## 4!*) !
8
−
− ,
,
−
−
8−
− − + /.
.//
+− − − /.
.//
−−
0
−
2D $ 41 A@ )#$! !$!!*$:
)#) %#
29A=9B=C) $( !!!1B$)#$$!( (81!%# 4



















!"!
#
$ # %
&
'()*
# '+* ,
# -"'()*
'*.'+*/'* '(0*
-"'(0*
'*/'*1'+* '((*
)23

MATLAB TUTORIAL 149
# -"'((*
/1'+*δ '* '(2*
4 /-"'(2*
/ '+*δ'* '(5*
6-"'(5*
/1'+*)'*/1 '(7*
$ /'+*
/)'*
!/ '*/'*
/ /1 '(8*
-"'(7*'(8*
,
9:/'*;
)/9)++<+:=>;
0/9)++<+:=>;
/9+++<):=>;
')0<*
&
/'+*/ '(3*
'(?*
$
/ '()+*
$
/1'+*)'*/1 '())*
$ '+*/)'* '()0*
@ -"'(?*
'()(*
A-"'())*'()(*
'1*/1 '()2*
-"'())*'()2*
,
9 :/'==*;

150 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
)/9)++<+:= >;
0/9+)+<+:= >; '()5*
/9+++<):= >;
' ) 0 *
) 0<
'*/ω
+ ξω + ω
0
0 00
'()7*
$ξω"
ξω
6+BξB) C 6ξ/+6ξ/) D ξ/)
Eωξ '*
'*
F
.. . .
/'*
9 :/'*
" %
-> #G 6

MATLAB TUTORIAL 151
G
+)
" G# G " "
# ".) " " G G
FGA() #
/
+)
'()8*
G
H
R C+
–
6
/
'()3*
$
/
+) F
/
+
'()?*
"
1/+ '(0+*
# $-"'(2*/+ D 'G*% GG

152 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
&"
)1+ + +
+ + +) 0
) 0
' *' * ' *
' *' * ' *
/+ '(0)*
-"'()8*
)1
/+ '(00*
$ 'H+*
!" #
,
9$:/ '*
9$:/ '$*
9$:/ '*
9$:/ '* '(0(*
9$:/ '*
6-"'(0(*9.):
A 'II*
#I+>I>,
/ '*
'I+>*'I>*
6
J'%ω*'%ω*JJ'%ω*'%ω*J " +∞.∞+
J'%ω*'%ω*J ωJ'%ω*'%ω*Jω
J'%ω*'%ω*J J'%ω*'%ω*J "
6 " " C " % " " # &' &

MATLAB TUTORIAL 153
6'%ω* G '%ω*"
'*" %ω'*'%ω* ω 0ω",
,'%ω*/J'%ω*JJφ'ω*J-,'%ω*/J'%ω*J' φ'ω*1%φ'ω**
%J'%ω*J φ'ω*/'ω* #
, " !" " 'ω*'ω* ,'ω*'ω*'%ω*'%ω* " ω " J'%ω*'%ω*J
" ,
6!" '.)1%+*" 'ω)* J'%ω*'%ω*J" ()&' 6ω)φ # ω/ω) '.)1%+* ( φ#(6 " ω/ω0ω/ω0
J'%ω0*'%ω0*J/.)3+K '(02*
% !" '.)1 %+* !" '.)1%+*
( E " ω0 .)3+K
*/ω ω0 0
)
J ' * ' *J % %'(05*
ω0 "
+("6
+*/9)3+1J'%ω)*'%ω)*: '(07*
J'%ω)*'%ω)*J/)ω) ()&'
A*+*

154 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
'*'%ω*'%ω* )+ω'*'%ω*'%ω*)+ω
#
'*'*/+ + ω
+ + + ξω + ω
0) 0
0 0
9') *') * :
9') *') * : ' 0 *
$ , ,
, , '(08*
%!/%ω
'%ω*'%ω*/ + ω + ω ωω + ω + ω ω − ω ξ ω ω
0) 0
0 0
9') *') * :
' * 9') *') * : ' 0 *
$ % , % ,
% % , % , %'(03*
%
J'%ω*'%ω*| /+ ω + ω ω
ω + ω ω − ω + ξ ω ω
0) 0
0 0
J) JJ) J
J' * JJ) JJ 0 J
$ % , % ,
% % , %'(0?*
J'%ω*'%ω*J/ − − − − ξω ωω + ω − − ω ω − ω
) ) ) )) 0 0 0
0 ?+
' *
, , ,
'((+*
0+)+J'%ω*'%ω*J/0+)+$10+)+J)1%ω,)J10+)+J)1%ω,0J.0+)+J%ωJ.0+)+)J
1%ω,J<<0+ω − ω ξω ω+
ω ω
0 0
0 0
0
'(()*
-" '(()* "
'%ω*'%ω* ,'*& $
'* ω !
)
' *%/+)0<
'*L')1%ω,*
' * + ω)
') *% ,'((0*
'*& Cω
ω − ω + ξω ω0 0'' * 0 *
%
" G

MATLAB TUTORIAL 155
'%ω*'%ω* '*'*A$
$J /0+)+$
J$/+ '(((*
" % GA(0
log10 ω
20 log10 |KB|
dB m
agni
tude
!
log10 ω
180
–180
0º
Pha
se a
ngle
KB > 0
KB < 0
"!
A" 1
( )Njω
% '*/0+)+ ω)
' *%/.0+
!)+ω ω)
' *%/.?+!A((

156 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
N = 1
N = 3
0
2 0
4 0
6 0
dBm
agni
tude
log 10 ω
N = 1
N = 2
N = 3
0
– 90
– 18 0
– 27 0
Pha
sean
gle
N = 2
@')1%ω,*)F')1%ω,*A(2(5
log 1 0 ω
Phas
ean
gle
0 º
4 5 º
9 0 º
ω
0 .2 1 5
ω = (1 /T )
2 0
log 1 0 ω
Mag
nitu
de
0 = (1 /T )
#
log10 (1/T)log10 ω0
1–20
0
–45º
–90º
10.2 5log10 ω
$

MATLAB TUTORIAL 157
) - " " ω/)F,
0 .0+F ω/)F
"
ωω − ω + ξ ω ω
0
0 0 0
%
J'%ω*'%ω*J/0+)+ω
ω − ω + ξ ω ω
0
0 0 0
%
/0+)+
ω ω− + ξ ω ω
0 00
0
)
) 0
/.0+)+ ω ω− + ξ ω ω
0 00
0) 0
'((2*
M ω
ω
BB)ωω
0
0
ω
ω
)
% 0+)+ω
ω − ω + ξ ω ω
0
0 0 0' * 0
%/.0+)+ ) /+
ω
ω
HH)0+)+ω
ω − ω + ξ ω ω
0
0 0 0' * 0
%
/.0+)+ωω
0
0
/.2+)+ω
ω
'((5*
% .2+F A(7
0.1 1 2 4 6
ξ=0.7
ξ=1
ξ=0.3
ξ=0.1Asymptotes
–10
10
0
ω/ωn
Mag
nitu
de i
n dB
158 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
–90º
–180º
0º
0.1 1
ξ=1.0
ξ=0.1
ξ=0.3
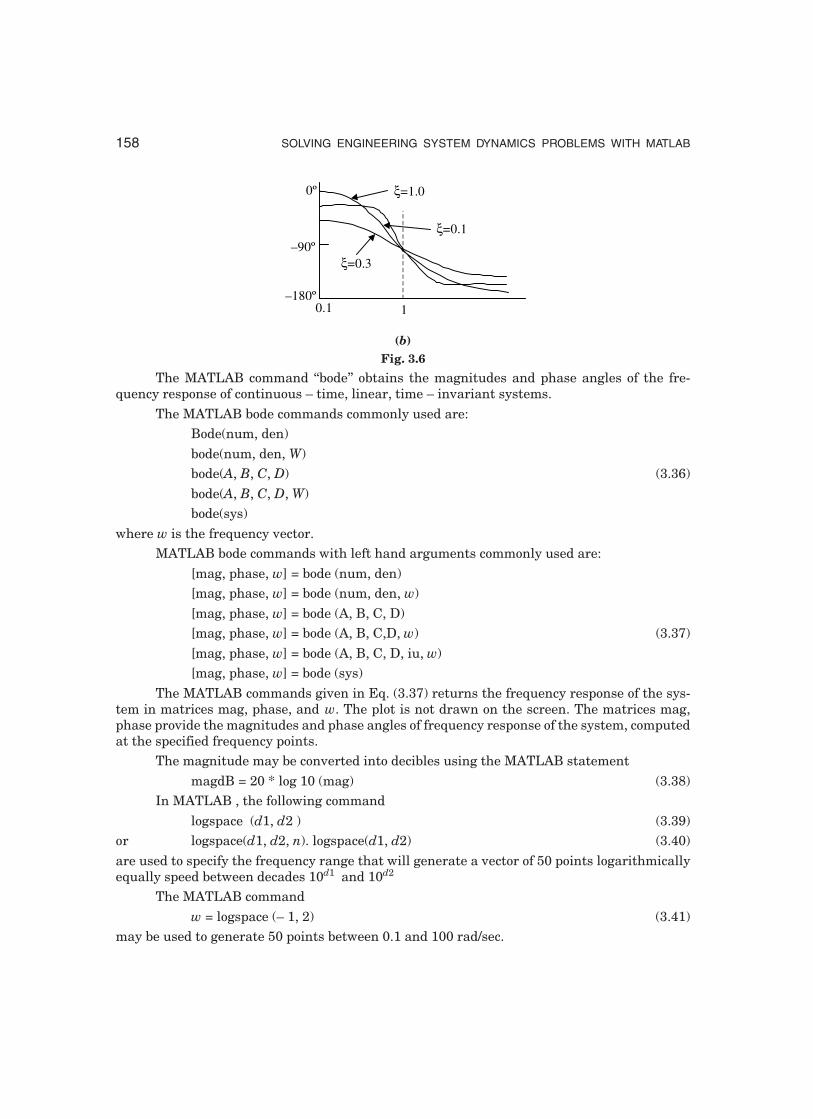
!
"
# $
# $
#$ #%!%&$
#$
#$
' !
' "
()*# $
()*# $
()*#+,$
()*#+,$ #%!%-$
()*#+,$
()*#$
.!#%!%-$ ! ' ! !
*/0120#$ #%!%3$
4 '
#2/$ #%!%5$
#2/$!#2/$ #%!60$
' 70 ' 202 20/
*#2/$ #%!62$
70 ' 0!2 2008!

MATLAB TUTORIAL 159
9
#2/$#%!6/$
' 202 20/' !
: !4 !9 #ω$!
4 ;<'= ' !
: > !: '' > !
#ω$ ? = !+ #$ ! #ω$> ω!4 #ω$ω ' ? + ! ' !
@ '' "
A#ω$*B#ω$BB φ#ω$B.#ω$*B#ω$B#φ#ω$C φ#ω$$ #%!6%$
'B#ω$B > #ω$ φ#ω$ #ω$B#ω$Bφ#ω$ B#ω$B φ#ω$#ω$!<
; >#ω$*;#ω$C#ω$ #%!66$
#ω$4#ω$ ;#ω$ #ω$ ∞DωD∞! #ω$'ω ∞C∞! #ω$ ω>B#ω$B→∞! > E!< ∞DωD0'= >0≤ ωD∞! (#ω$C ) #ω$' *#;C$' > !
F? #$' "
#$F #$ #ω$

160 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
#ω$* + ω + ω + ωω + ω + ω2
#2 $#2 $ !!!!!! #2 $
# $ #2 $ !!!!!! #2 $
! " " "
" "#%!67$
F.!#-!/5$ ω →0 !
# $ ##$ω → ∝ !
@ #$ ! 4 #ω$ #ω$ 'ω!
4 #$ !
#$'*#σCω$ '!ω σ =! #$ #$#$ !
: > ! #$ : %&! ' ! 4 : #$ > #$ #$ ω> !: : '#$* !
: #ω$ #ω$ #ω$ ω 0∞! B#ω$BB#ω$Bω 0∞!
4 #ω$ ω! E #ω$ >!:' !
G ' !
: ? !:!
# $ #%!6&$
,':
#$* #$
#$#%!6-$
' '! ' :"
# $
#$
#$
MATLAB TUTORIAL 161
#$ #%!63$
#$
' !
.!#%!%/$ !
'
()* # $
()* # $
()* #$
()* #$ #%!65$
()* #$
()* #$
; ! ' !; !
: : !4 !: ?!: ( ( !
4 #ω$ #ω$ ::#ω$!
:' !"
#$ B#ω$B '
# $#ω$ =!
!
#ω$*B#ω$B∠#ω$ #%!70$
#ω$B#ω$B #ω$ 'ω! /0 20B#ω$B #ω$ ωω" ' !
: : !: ( ( !4#ω$#ω$
162 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
#ω$#ω$ :? ' :#ω$#ω$! !
( :!#ω$' : !: !:230H>!( #0230$!: !: # $! ' :!4 =>: !
(I'')* #$ #%!72$
!
4 . #%!72$ !
' ? "
()*# $
()*#$
())*>#$ #%!7/$
?*/0120#$
*#)$
' '"
*2
'/0120##$$J%
*C2
#%!7%$
'*#$
4 ' ' !
2!
/!


164 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
F'
*+++, #%!&0$
*++++, ! #%!&2$
+ . #%!%5$!: .!#%!6%$
++-+. #%!&/$
.!#%!&/$: ' !
4' > ' : #$: #2/!!!!!$' !
#+,$ #%!&%$
! ' !
4 ' K !9' !
/%'0'
F .!#%!75$
#$ #%!&6$
' ' > !
#$ K !
#$ #%!&7$
'
*# $ #%!&&$
*#$ #%!&-$
' ' ' !
166 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
#%!-5$
,
( #%!30$
. #%!-5$ '
( #%!32$
+ . !#%!7-$ #%!&2$' '
*
#%!3/$
(*)*#$ #%!3%$
*#$!
20' 31'
' "
# $ #%!36$
#$ #%!37$
*# $ #%!3&$
*#$ #%!3-$
. !#%!30$#%!3%$' !
!
+
*#0$(! #%!33$
*C #%!35$
#( )$ #%!50$
!

MATLAB TUTORIAL 167
45 64 0764% . %76/"17%
- %$
48$'+&&,#-.#/$"012013+01("4#"&
/#$*/
0 5 61
7#$* 7
/
0 5 8 5 91
.#$*/
0 5 :1
;#$*/
9#$*6
05 .1
8#$* 7
/
0 5 6 5 91
6#$*9
0 5 91
:#$*/
0 5 <1
G 1 (s ) G 3 ( s )
G 8 ( s )
G 4 ( s )
G 6 ( s )
G 7 ( s )
G 5 ( s )
G 2 ( s )C (s )
+
–
+
++
+
+
+–R (s )
4
% "
I2#$*28#C-$
I/#$*28#/C%C7$
I%#$*28#C3$
I6#$*28
I7#$*-8#C%$
I&#$*28#/C-C7$
I-#$*78#C7$
I3#$*28#C5$

168 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!
"
"
##$%&! "
'(("
!
!(
!(
)%#*+"
,*#*+
+-%%$-')%#*+,*#*+
+- #*$$+#%+$
./"././" !.!/"!./ "./ "!/!./!."/ . /"./!././.!/./ "".//!!
ξω !
"#$%
&'(
) &* ) &'(
"#$%
(!(+*
) (!(%* ) (!(+*
"#$+ × +
00-1
00%*
00&$%

MATLAB TUTORIAL 169
00%* &$%
%+$*%-2%3
4444444444444444
.//
00 $%+5&$%
$%
!
006$&$%78 $%
6$
00+!76$8 $%
+
00##27 $%8+546$.
#
0086$.(!86$./"86$/7 $%
00#$-$%$9#(6$8#27+5(6$.8
#$-$%
!
00+*:#1
00+$#
0021$;<
00;<
%+
00%* :!
00&$%:!
00:%* :&$%:
%+$*%-2%3
!
444444444444444444444
.//!
00 $%:+5&$%:
$%:

170 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
006$:&$%:78 $%:
6$:
"
00+:!76$:8 $%:
+:
00#:#27 $%:8+5(6$:.
#:
! !
00:86$:.(!86$:./"86$:/7 $%:
:
!""
00#$-$%:$9#(6$:8#27+5(6$:.8
#$-$%:
00+*:#1
00+$#:
0021$;<
00;<
%+
00%* -=
00&$%-8==
00-%* -&$%-
%+$*%-2%3
"
.//"
00 $%-+5&$%-
$%-
/!
006$-&$%-78 $%-
6$-
"
00+-!76$-8 $%-
+-
(!
00#-#27 $%-8+5(6$-.
#-
(!
00-86$-.(!86$-./"86$-/7 $%-
-

MATLAB TUTORIAL 171
!"(
00#$-$%-$9#(6$-8#27+5(6$-.8
#$-$%-
00+*:#1
00+$#-
0021$;<
1.5
1
0.5
00 0.2 0.4 0.6 0.8
Time (sec)
2
1
0
1.5
0.5
0 100 200 300 400
2
1
0
1.5
0.5
0 2 4 6 8
Step Response
Am
plitu
de
Time (sec)
Step Response
Am
plitu
de
Step Response
Am
plitu
de
Time (sec)
, !
-
.
' %
* + ' %
/ ) 0 ) &*
) * 1 ) && &%
−− − −
00 2
00&$%(("(
00+&$%

172 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
( /"
( ("
"
!"/"
!"("
, 3 !
4&*(
" ) *#" ) 0#" ) 1#" ) &&#
00 2
00%*
%*
00&$%#1>((("(
00;+<
%+
+
00%* &$%
%+$*%-2%3
.!/./!./ /!
00;1$++<
%+
1$+
00#1$
%+
(
("
(
(
00;+<
%+
+
00$$&:-?
%+$*%-2%3
.!/./!./ /
00#1$
%+

MATLAB TUTORIAL 173
("/"
("("
(/"
(("
4"#$%
) *
) 0 ) %*
5 !
00 2
00-1
00%*
00&$%
001-*+%* &$%
@ #*$$+#%+$2++AB%2%C2=
4
3
2
1
0
– 1
– 2
– 3
– 4
– 16 – 14 – 12 – 10 – 8 – 6 – 4 – 2 0
Root Locus
Real Axis
Imag
Axi
s
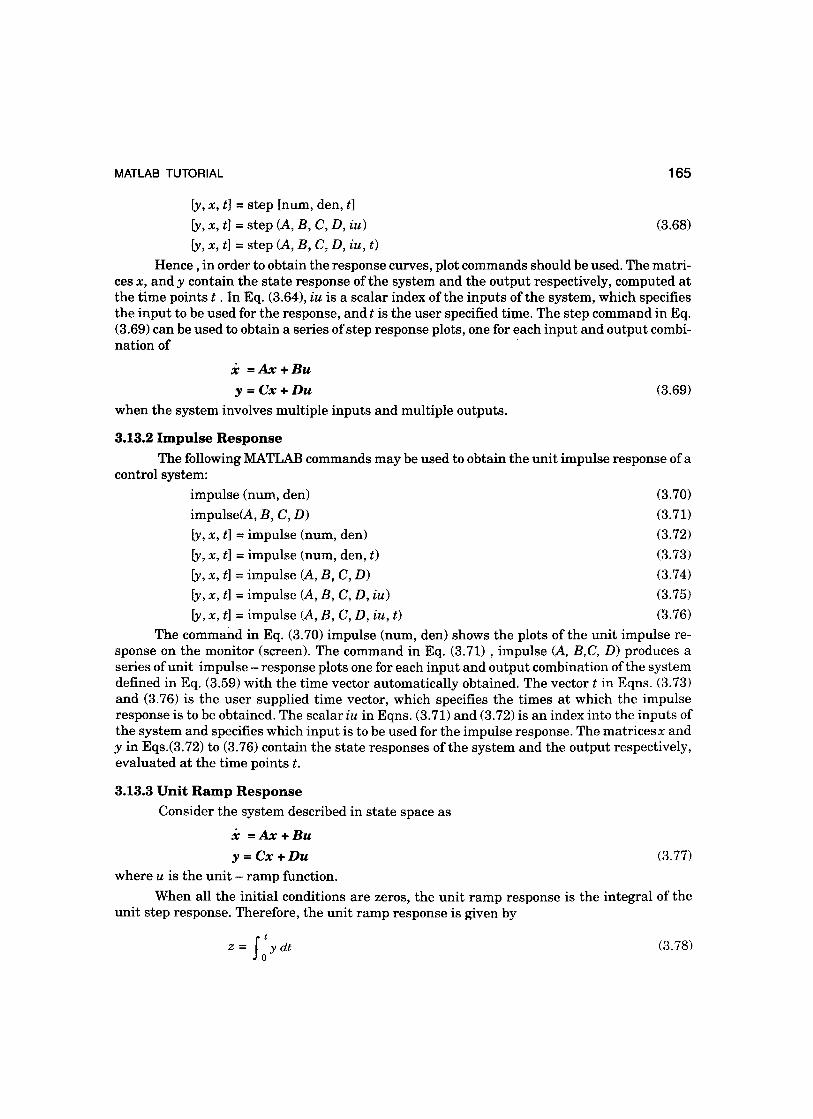
3 !6'!/4"#
G(s)C(s)R(s)
4"#$%'(" * ) '#
" ) &#" ) %#" ) +#" ) *#
−
, !

174 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
00 2
00%* 8(
00&$%#1>(((!(
00%* &$%
00$$&:-?
00+$#
@ #*$$+#%+$3
%+$*%-2%3
.(/"
4444444444444444444444444444444444
.!/./".4/
C2=+AB+A$$+#%+$
10
8
6
4
2
0
– 20 1 2 3 4 5
Step Response
Time (sec)
Am
plitu
de
D2 *12%+AB+E$E$+A%&%% 2%2 * 4#A+$:$AE2 F$%-$A$
+$-%&4&$##92 2%2+%E12&
, 7
3 !6'!0
4"#%
%
&*" ) ' ) 0#
" ) ' ) 0#" ) &#" ) '#
G(s)C(s)R(s)
MATLAB TUTORIAL 175
00 2
00%* 8
00&$%-%E#1>((
00%* &$%
00$$&:-?
00+$#
@ #*$$+#%+$+$$C2=
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
00 0.5 1 1.5 2 2.5 3
Time (sec)
Step Response
Am
plitu
de
3 !6'!8
4"#9" ) &#
" ) &#" ) *#" ) /#
9 !
G(s)R(s)
00 2
00933
0031$%A9
00&$%#1>(((
00&$%&$%/99
00.+&$%
00$1G

176 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
00 9
002 0
00.
0099
00:$?
00$%&
00$%&
@ #*$$+#%+$3
.
(
(/!!!!
((!!!!
(
(
(
(
(
(
: ;<;
3$'(!
4"#$(
(
3" ) &#" ) ' ) 0#" ) ' 0#
" ) &#" ) '#" ) ' ) 0#" ) ' 0#
00 2
00D2 #1$H>5*2+%&H2-A1+#1+
00-1
00=((/8((8
00((((/8((8
003
00%* &$%6#=<<3
00+*:#1%>5*2+%* &$%

MATLAB TUTORIAL 177
00+*:#1H2-A1+%* &$%
00%2&
0092+(!
A$H>5*2+%&H2-A1+#1+$+AB%2%C2="
0 dB0.25 dB0.5 dB1 dB
3 dB6 dB
1
0.5
0
– 0.5
– 1
– 1 – 0.5 0 0.5 1 1.5 2
20
40
– 20
– 40
0
– 270 – 225 – 180 – 135 – 90 – 45
Nyquist Diagram
Real Axis
Nichols Chart
Imag
inar
y A
xis
Ope
n-Lo
op G
ain
(dB
)
Open-Loop Phase (deg)
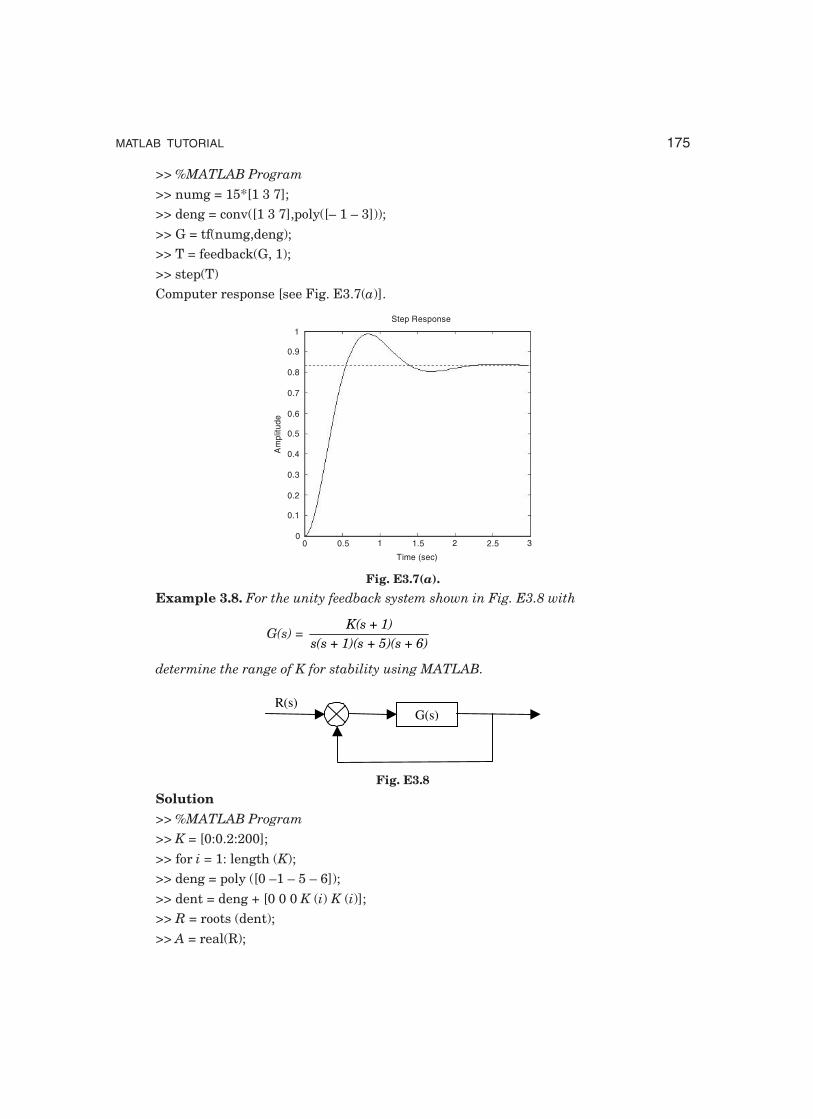
!2>,
4"#$%1!&%*%" ) (!*0#
, !
4" ! !"
+ +
" "!
+ +
A$11B2%# #&*-$+A$&$&2
00
00&$&2
00%* ""!
00&$%
00:&$%* &$%
0021$;&$&2 4<
178 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
50
45
40
35
3090
45
0
– 45
– 9010
– 110
010
1
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
Frequency (red/sec)
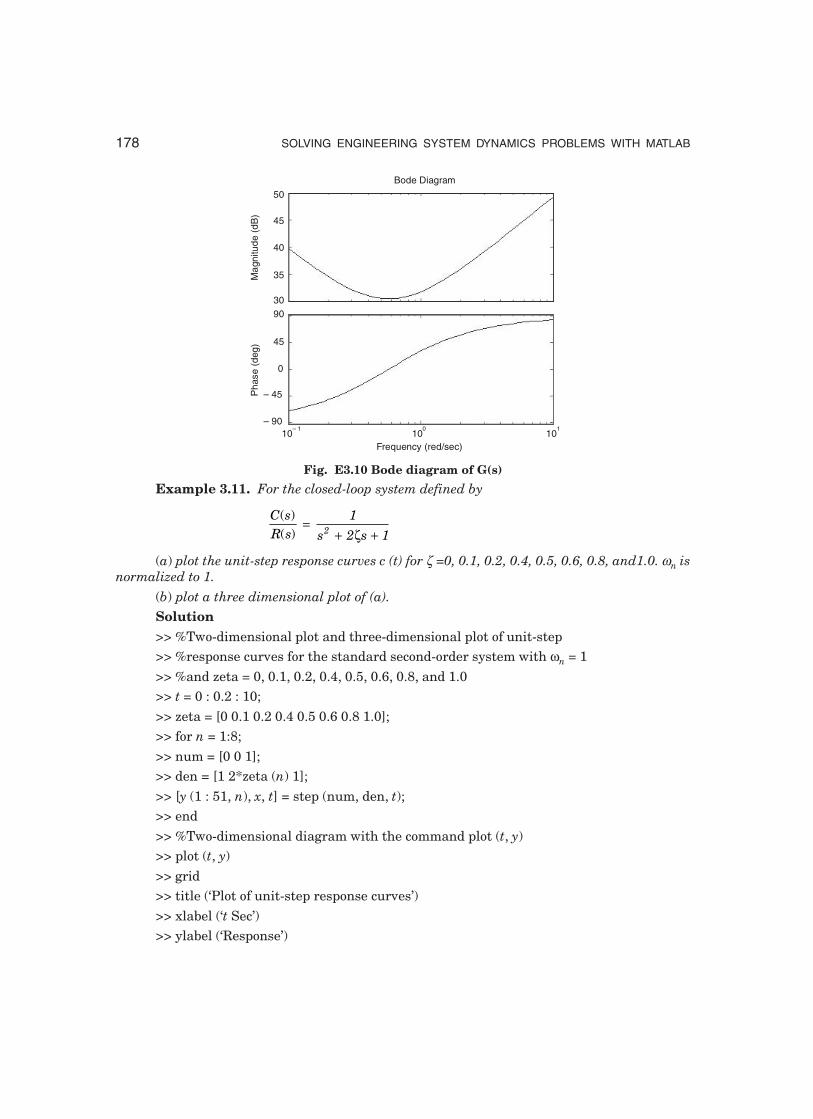
+ ζ +
ζ ! " # $ ω
%
ω
! " # $ %
& !&'
( ! " # $ % )'
&%'
()'
(!* )'
(&#&) '
+
+
,- .
/0 ,1 .
0 ,2 .

MATLAB TUTORIAL 179
/" %$,3 .
/4 5, .
/4 #, !.
/4 !!, ".
/! 6 , #.
/" %, $.
/4 6, %.
/" 6, .
7 .
.
, .
/0 ,1 .
0 ,3 .
0 ,2 .
ζ = 0
0.1
0.2
0.40.5 0.6
0.8 1.0
2
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
00 1 2 3 4 5 6 7 8 9 10
Res
pons
e
t Sec
Plot of unit-step response curves
2
1.5
1
0.5
01
0.5
0 02
46
810
Res
pons
e
Three-dimensional plot of unit-step response curves
1 Secζ
!"

180 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
#'
( (
ζζ
) ζ * ζ + ! " # , $ - *
.'/0'1 2
)*
8 98:8; + +
+ 0 &
/ )*
& !&'
( ! 4 " # $ 5 % 6 )'
&'
(!* )'
(!* )'
(&#&) '
+
,- .
/0 ,1 .
0 ,2 .
/! %#. .
/ # 5#. !.
/ # $. 4.
/ # #. ".
/ # 4%. #.
/ # !#. $.
/ 5 !. 5.
/! < , %.
/ # . 6.
/ # #. .
, .
, .
/0 ,1 .
0 ,3 .
0 ,2 .

MATLAB TUTORIAL 181
+ + 098:8;
+ 7+ =4 !
0.10.20.30.40.50.6
0.7
0.80.9
1.0
2
1.5
1
0.5
0
– 0.5
– 10 1 2 3 4 5 6 7 8 9 10
t sec
Plot of unit-impulse response Curves
Res
pons
e
#!$
2
1.5
1
0.5
0
– 0.5
– 11
0.5
0 02
46
810
t secζ
Re
spon
se
Three-dimensional plot
#!"
*)) *.'/0'1)
34
3" (
( + ( "
3" ( ( ,
( ( ! ( $
51
6 * 7
5

182 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
98:8;-+
>?(<)(<4<#)#
>>
0 >
,1 .
,1 .
7 +
(>-@+@)+>'
& &!'
(9-))0 >)'
70
7&& +.'
!*+.7A5B'
,9+.
!*+.7
,18.
)18)7
0 ?
7+ + ?
%& &
-!*%CD<!*%E!ADA"*%E"*%C'
-<-B
%'
- /<%*CD<%E!'
"C);@*%*D<!*E!AD"*%E"<"*%E!A!'
C)18*D<%E!*D<!*%E!AD"*%E"<"*%E!A!'
,;*.)18
,- +*.2
,F+*.%
,- *.2*
,1 + *./
,- ? *./
0 ?

MATLAB TUTORIAL 183
0?3'
/
,1 .
,1 .
G &
H C C+&
#A
A4A#
&
#A#
E4A%E!A#
; 7+ =4 4
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
Frequency (rad/sec)
40
20
0
– 20
– 40
– 60– 45
– 90
– 135
– 18010
– 110
010
110
2
9+
<4 4!
18
)18
6 56
;6 56- +#4 %6!F+ #6-
$641 + %"44- ? "$$$
7+ =4 4

184 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
1.4
1.2
0.8
0.6
0.4
0.2
0
1
0 0.5 1.51 2 2.5 3 3.5 4 4.5 5Time (sec)
Step Response
Am
plitu
de
:? 0
>?(<<5)(<!<"<%)!#
>>
+; 0 ( 7+ =4 4
H C C+&
!#AA5
A!A"A%
&
!#E!A!A5#
E"A"E4A#$E!A$"
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
Frequency (rad/sec)
40
20
0
– 20
– 40
– 60– 45
– 90
– 135
– 18010
– 110
010
110
2
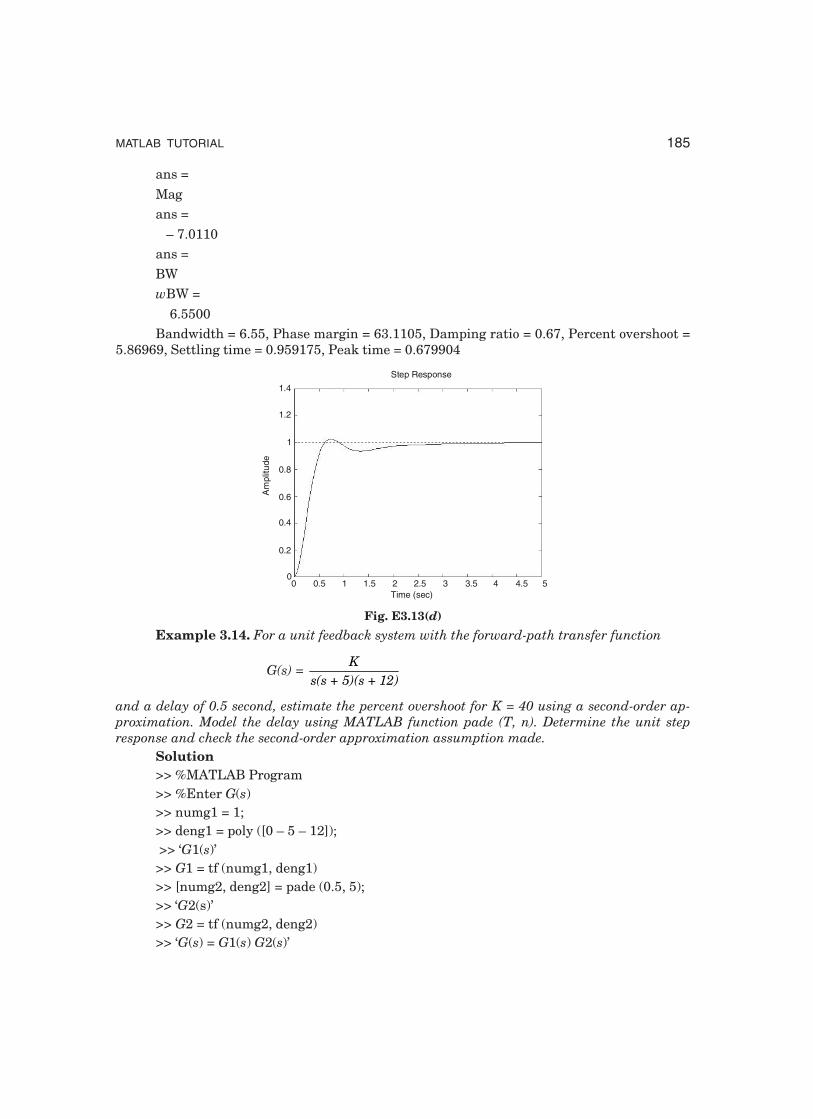
MATLAB TUTORIAL 185
9+
<5
;@
);@
$ ##
;$ ##- +$4 #F+ $5-
# %$6$61 + 6#65#- ? $566"
1.4
1.2
0.8
0.6
0.4
0.2
0
1
0 0.5 1.51 2 2.5 3 3.5 4 4.5 5Time (sec)
Step Response
Am
plitu
de
%7))
39
( " (
" 9!*
& . *.'/0'1 / :
7 &
98:8;-+
= 3
+'
+(<#<!)'
,3.
3+ +
(+! +!) ##'
,3!.
3!+! +!
,333!.
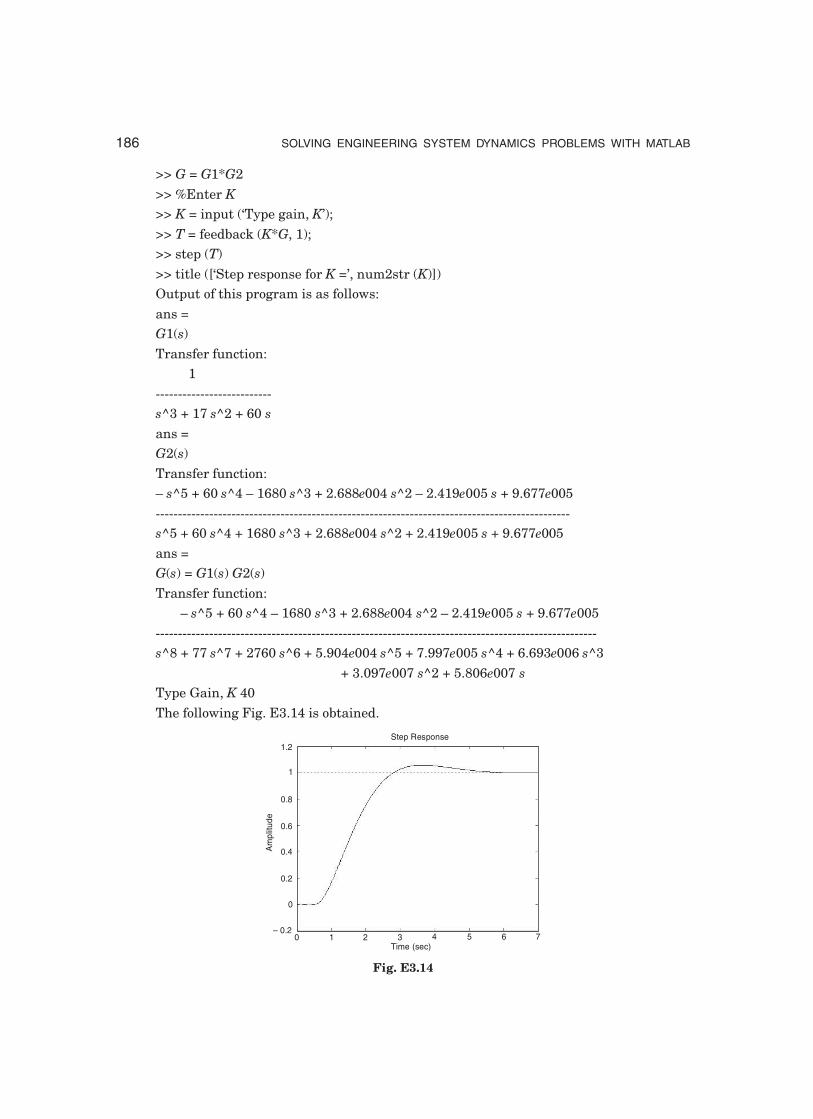
186 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
33*3!
= 9
9, +9.'
/ 0?9*3'
/
(,1 9.!9)
I+&
3
&
E4A5E!A$
3!
&
<E#A$E"<$%E4A! $%%"E!<! "6#A6 $55#
E#A$E"A$%E4A! $%%"E!A! "6#A6 $55#
333!
&
<E#A$E"<$%E4A! $%%"E!<! "6#A6 $55#
E%A55E5A!5$E$A# 6""E#A5 665#E"A$ $64$E4
A4 655E!A# %$5
>9"
+7+ =4 "0
1.2
1
0.8
0.6
0.4
0.2
0
– 0.20 1 2 3 4 5 6 7
Am
plitu
de
Time (sec)
Step Response
%

MATLAB TUTORIAL 187
&8 *.'/0'11
3"
( + , ( "
3+
! +
, ( " ( , ( $
( $ ( ( , (
98:8;-+
; +
#'
()(4)( 5#)'
0
G & ; 7+ =4 #
20
– 20
– 40– 60– 80
– 100– 90
– 135
– 180
– 225
– 27010
– 110
010
110
2
Frequency (rad/sec)
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
0
&
98:8;-+
;
(5#5%)'
(%!5)'
0
G & ; 7+ =4 #

188 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
10
0
– 10
– 20
– 30
– 45
– 90
– 135
0
10– 1
100
101
102
Frequency (rad/sec)
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
! !
" # $
# % # &! # ! # %&
'()
*''+,')-
. /
!
"#
$"%%&%%%%
'(')(''
0 *#"
+((,-
./10
01'2"
"1'%.3
42.
+"567
+"87
MATLAB TUTORIAL 189
+"97"
+":7:
+"474
'0,'2:
+";
.+!
<++(
=++"(
/
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
?&/?/@?/'@/1'
A+2,2"(
/
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
?//?//
=-B*#","-6"C")D)E)
5
4
3
2
1
0
– 1
– 2
– 3
– 4
– 5– 3 – 2 – 1 0 1 2 3 4
x 10– 3
Real Axis
x 10– 3 Nyquist Diagram
Imag
inar
y A
xis
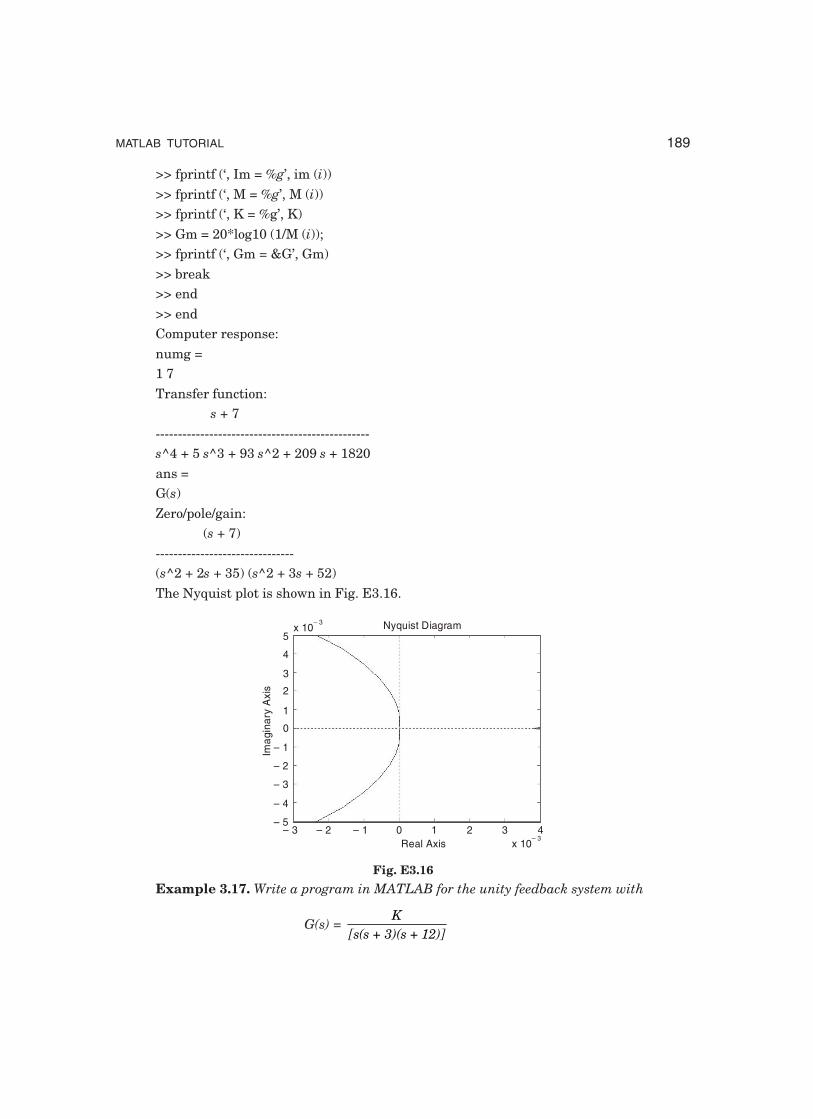
"
2 # % # 3!4

190 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
,'"-*'','
"-*','"-
.5
,*'%%
')'(')(''
7D+4
4"=*"4
.40
:F .40
7<,,"+"
+((,-F
"F3%1'
+"5"474
+"C+#*1'7
+":"7:
+":"G7'0,':
+"F-7F
'0,'2:"
+""+"G7
.+!
7<,,-+"
+((,-:
":3
+"5"474
+"C+#*'G7
+":"7:
+":"G7'0,':
+"F-7F
F1'/F
+"F-+"G7F
.+!
MATLAB TUTORIAL 191
H,+++":H=IHG+""(
,+
,
7G,""
7D+
,*'%%
')'(')(''
7D+4
4"=*"4
.40
FJJ +"40
G
'0,'
<++(
=++"(
>>>>>>>>>>>>>>>>>>>>>>>>>>
?/?/E
=*"4&'
=-G,"-6"C")D))
50
0
– 50
– 100– 90
– 135
– 180
– 225
– 27010
– 210
– 110
010
1
Frequency (rad/sec)
Bode Diagmram
Mag
nitu
de (
dB)
Pha
se (
deg)
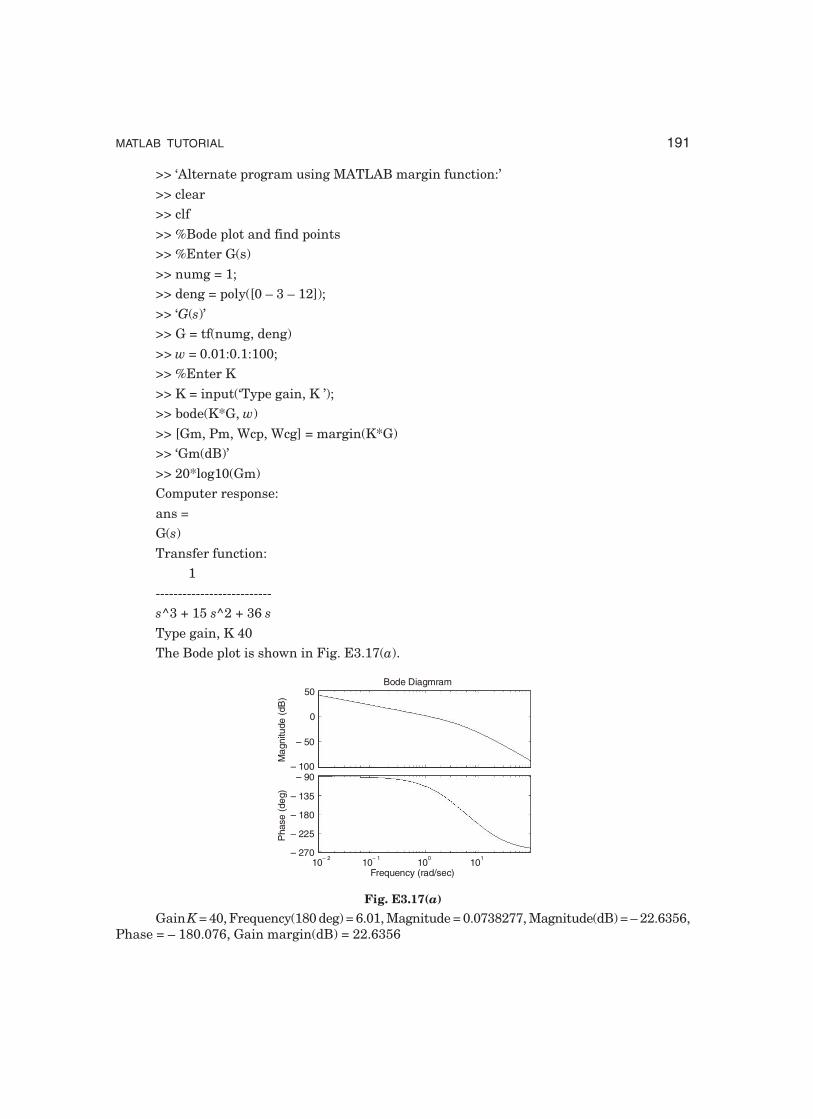
""&'C+#*1'E)':"')'1:"G%)EE
F-%1')'E"+"G)EE

192 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
""&'C+#*'G):"')@&1:"G%')1&
F-%)1@F-+"GE&)&'
H,+++":H=IHG+""(
=++"(
>>>>>>>>>>>>>>>>>>>>>>>>>
?/?/E
=*""&'
)'''
F
E)1@
J
E
J
)'&
G
)E'E
=-G,"-6"C")D)
50
0
– 50
– 100– 90
– 135
– 180
– 225
– 27010
– 210
– 110
010
1
Frequency (rad/sec)
Bode Diagmram
Mag
nitu
de
(dB
)P
hase
(d
eg)
'
,'"" 67-
+=
!
" 8
9 # % # 3&

MATLAB TUTORIAL 193
*''')
'0"-
*'0)0
''),'")
. /
7D+
'
7D+4
4"=*"4
=
=.!40
.=
",<,>,+#*+
:F .=
: $:
:
:G'0,':
+((,-:
":3')'
+"G6"-7
.+!
<++(
=++"(
/
>>>>>>>>>>>>>>>>>>>>>>>>
?/?/
=*"4&'

194 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
=++"(
&'/''
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
?/?//''
:
)E
:G
')@@
)@
G6"-')1'E
=-G,"-6"C")D)1)
40
20
– 20
– 40
– 60100
135
90
45
0
0
– 4510
– 110
010
110
2
Frequency (rad/sec)
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
*''
'-
!
8 3
9 % # ! # 3
. /
7K">++
''
'(')('
,"
,%
+"

MATLAB TUTORIAL 195
",K">++
$,.,L
*,.,K">+"
$)'&)'K">+"
$)')'M
10
8
6
4
2
00 2 4 6 8 10
t Sec
Unit-ramp responseU
nit-
ram
p in
put a
nd o
utpu
t
Unit-ramp input
Output
!
6 % !
$ # 3: # 378
9 # & # 33 # 3: # 37
',
00+,0' -
.;,
''E'
E'
'(')'('
+
,
+"
",K">+
$,.,L
*,.,M

196 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
1.6
1.4
1.2
0.8
0.6
0.4
0.2
0
1
0 5 10 15 20t Sec
Unit-step response
Out
put y
(t)
78+"+'7@'7"",,
6-",3')/
6-",3')@/
+"N"%0')'
+"N"
')&''
*$ $
!N"%0')'
!N"
)''
$N+-*$%
$N+-
')@
''6-",')@1;3)'%
,"N"%0')'
,"N"
E)'''
<'''''
'',
8
9 % !
= # 3!
# 3!
# & #
*',
>7-$

MATLAB TUTORIAL 197
7K">++>,"
''
1
'(')('
,"
,%
+"
",K">++
$,.,L
*,.,M
$)'E)K">+"
$E)&)M
10
8
6
4
2
00 2 4 6 8 10
t Sec
Out
put
Unit-ramp input
Output
Unit-ramp response
!"
79$%')
''
1
'(')(
$%')0
,"
,%
+"
",8"$%')
$,.,L
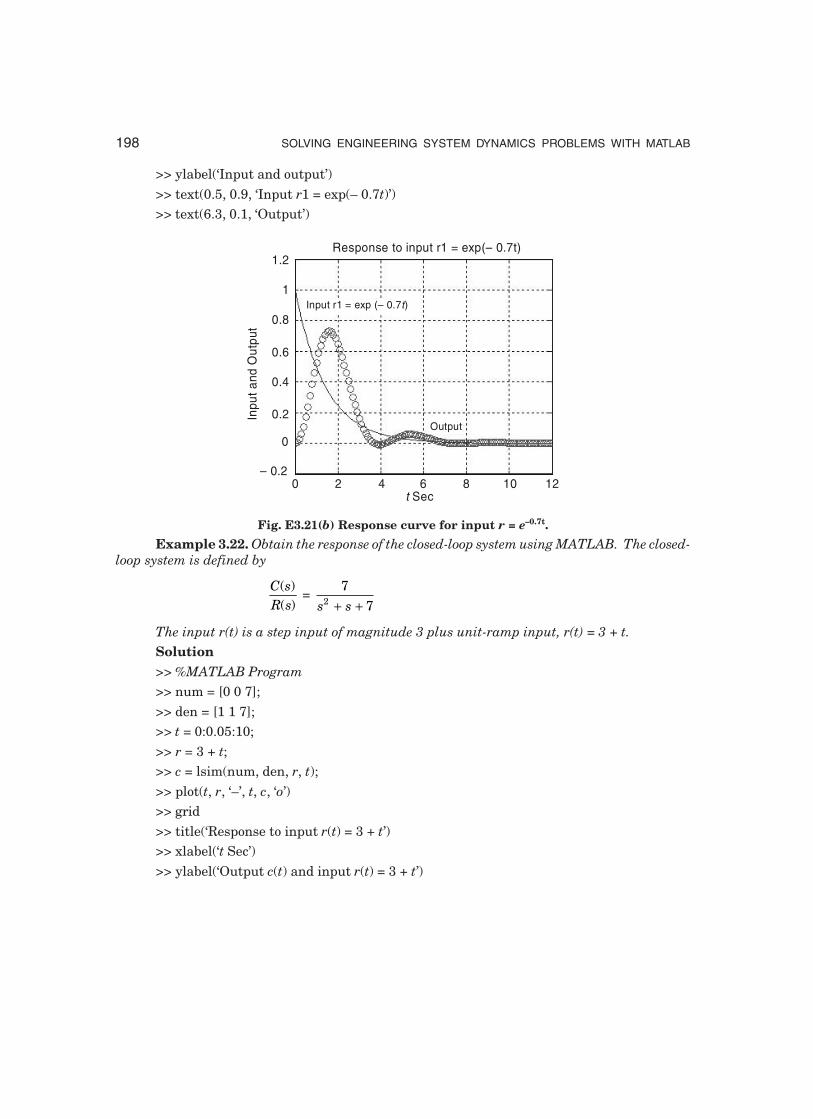
198 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
1.2
1
0.8
0.6
0.4
0.2
0
– 0.20 2 4 6 8 10 12
t Sec
Response to input r1 = exp(– 0.7t)In
put a
nd O
utpu
t
Input r1 = exp (– 0.7 )t
Output
+ +
!" #!$
%&
!"#$
"#$
%%$
&$
'(! !$
)*(
(+''( &
,-
( &

MATLAB TUTORIAL 199
14
12
10
8
6
4
2
00 2 4 6 8 10
t Sec
Response to input ( ) = 3 + r t t
Out
put
c(
) a
nd in
put r
()
= 3
+
tt
t
!
& '
( ) *
( ) + +
, $ !
$ ! $ - $ + $ .
()
.
,
++ + + +
+
+ + + +.
/
,
/%&
!"#$
" /#$
,%% $
, % % $
, %%$
,.%%$
,%%/$
,",, ,,.,#$

200 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
*- ' !,$
*"//#$('*
)*(
(+- '0()
+('
!)(*('
8
6
4
2
0
– 2
– 4
– 6
– 8– 10 – 5 0 5
Real axis
Root-locus plot of G(s) H(s)
Imag
inar
y ax
is
"#
$0 ' '
( +
,
$ 1 $ 2
"* 3 !
%&
"#$
*'
'
/.&
/.
.
%&
!"#$

MATLAB TUTORIAL 201
"#$
*- ' !$
(''1 *
)*(
(+2- '0(
5
0
– 5– 6 – 4 – 2 0
Root Locus
Real Axis
Imag
Axi
s
$"%
& 0
*
( #! +
4
$ 5! $ 1 $ 4
'63 (
3
"#$
*'
'
.&
.
/
363
!"#$
"#$
1 (' !
*" #$('*$(''1 *
)*(
(41 ('0(

202 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
2
1
0
1.5
0.5
– 0.5
– 1
– 1.5
– 2– 2– 3 – 1 0 1 2 3
Real Axis
Nyquist Diagram
Ima
gin
ary
Axi
s
&'()
56**72'(6*()660-(*-!06-*((-
(6-'2''!(' '
* 0
*
( #, $ !
$ 4 $ .
& 63 ( ,#4"45"455
(
,
++ +
/
,
++ +
%&
!"#$
"/#$
'%%$
"*(!'#1 (' !'$
"* (! '#1 ('8 !'$
"*(!'#1 ('8 !'$
*(!* (! *(!
*"#$('*
)*(
(41 ('()*!'
+('
!)(*('
9
9
9

MATLAB TUTORIAL 203
3
2
1
0
– 1
– 2
– 3– 3 – 2 – 1 0 1 2 3
Real Axis
Nyquist diagram
Imag
inar
y ax
is
*'()+
*0*
( #1
$ 4 $ !
& 63
(
( *0
(+ +
. + +
%63 ( 7(
!"#$
".#$
! "#$
".#$
1 (' !
6
: **6
1 (' !
*"#$('*
)*(
/(
(

204 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
5
4
3
2
1
0
– 1
– 2
– 3
– 4
– 5– 5 0 5
Real Axis
Nyquist Diagram
Imag
inar
y A
xis
'()#
,8 '89!+:"
#7+;< ! & *
)1s5.0(s
7
+Gc(s)+
–
,-(
;*!;()< /0*6-'2('- &< 6
' !06)-*( ('062' (')(= >
? ?;*6-'2 & < 7?62
*'0*0 -(6*7*'6)0(-(-06)(=2*'0*0 -(
6'(*-'2 &< (')(=
/? ???
56-!'*! '-*( ?-!'*56'(!'0*!0
-!'*('
(,
++

MATLAB TUTORIAL 205
s = –2 + j2 3
jωj2
j1.5
j1
j0.5
–j0.510–1–2–3–4
90º 120º
σ
s = –2 + j 3
jω
–j0.510–1–2–3–4
90º
σ
j2
j1.5
j1
j0.530º
. " ## # - "/
#" 0 1 # 2
,#
07'-6@*06-!'* 6606-!'*
! '-.(**6=6')0?';()< /
A- (',
.
$
$
56)(,('(0*!6-((
. <
,
= − +
++ +
* ,
.
. <
= − +
+
* (
.
++
562*'0*0 -(06-!'''!(')(=
(
+
.
++
.
+
. +
56-'2*'0*0 -(06*()(''!('
.
. + +
56-!'''!'-'2*'0*0 -(('
. + +

206 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
BCB5DBE*)*!6 (2'*''- *='06*()(-!2
'''!'(')(=756 (2'*''- *='*'67(;()< /
%&
!" .#$
" .#$
!-" #$
-" . #$
%%$
' !$
' !--$
,-
'
*()(''!
.:!'''!
)*(
(F(2,+'''0*()(,'!:!','!
1.5
0.5
1
00 10.5 1.5 2 2.5 3 3.5 4 4.5 5
Original system
Compensated system
Out
puts
t Sec
Unit-Step Responses of Original System and Compensated System
,
38 '89!+2
#74$<4=
)s5.0(
12Gc(s)
+
– Lead compensator
3

MATLAB TUTORIAL 207
;*'(*-'2&<6)-*( (067
2'6*()((')(=?? ?56*0*6)0(-(-
(')(=
/????
A-6-!'*! '-*( ?
G'--!'*060*!
(,
++
-6'6@*06-!'***(66')
0?606-!'*! '-';()<
jωj2
j1
–j1
10–1–2
90º
σ–3
34 "/ # 0
351 #
56*0* (,
++
76*9! '(0*!6!)( -(('
<
,
= − +
++
* 9
<
= − +
++
56*0*6-!'*-!'
(
++
5600*7**'0*0 -(('
(
.
++
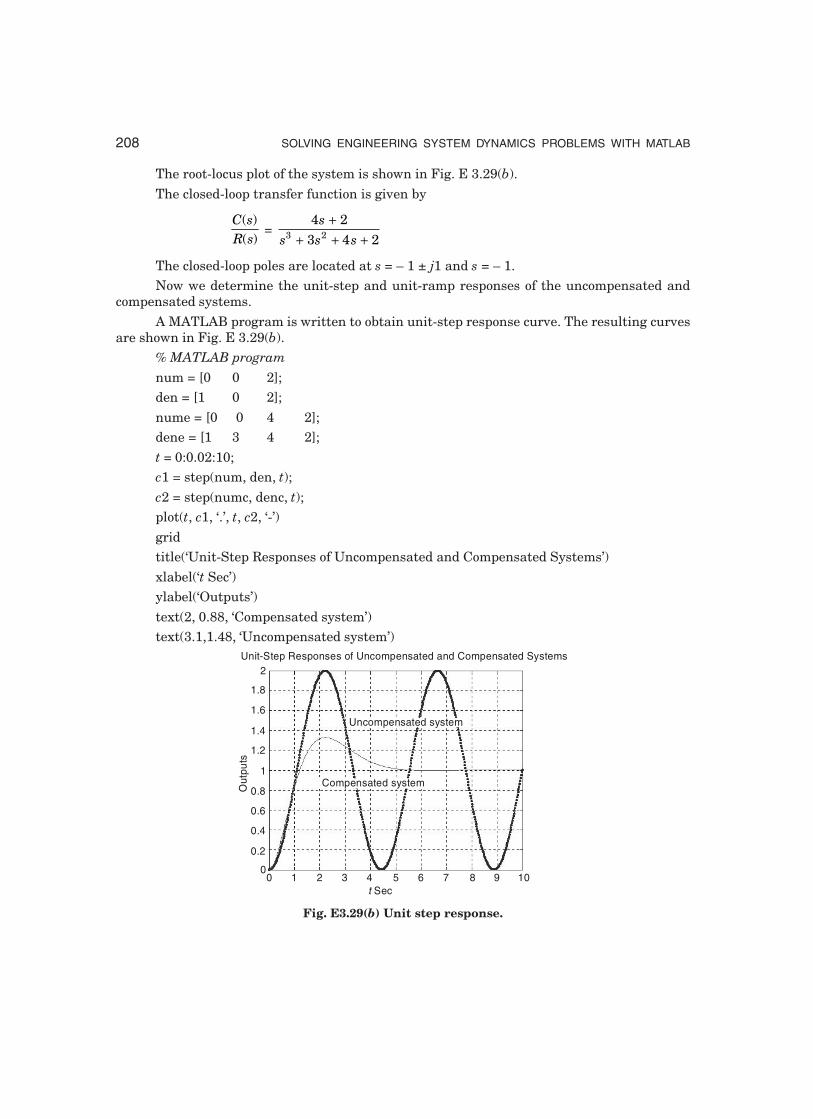
208 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!
"
"
++ + +
!#$%$!#$
&
'(')'*
!+, , -.
!+$ , -.
!+, , " -.
!+$ " -.
!,/,,/$,.
$! 00.
! 00.
0$01200012
134 5 3 6 42
7 142
18 2
70,99016 2
7$0$"9013 2
2
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
00 1 2 3 4 5 6 7 8 9 10
Uncompensated system
Compensated systemOut
puts
t Sec
Unit-Step Responses of Uncompensated and Compensated Systems

MATLAB TUTORIAL 209
'(')'*
!+, , , $-.
!+$ , $ ,-.
!+, , , " -.
!+$ " ,-.
!,/,,/$:.
$! 00.
! 00.
00$0120001#2
135 5 3 6 42
7 142
1; 8 2
1201 201#201 2
15
10
5
00 5 10 15
Inpu
t and
Out
puts
Uncompensated SystemCompensated System
t Sec
Unit-Ramp Responses of Uncompensated and Compensated Systems
!"#$#
%#&'(&()&## * !#&#"*
" #*$# *#+(#+#
#&, #*# * # # #
&-# *# #*# **#
# *&

210 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
8s4.3s
12 ++s
)1bs)(1as(K +++
–
++
D(s)
! $ $.
+ +
!
" 9 $ $
. + + + + +
! " 9
. . . .+ + + + + +
;<
=0ξ!,:ω!">
!#$,
<
?$,?@,:@"?"!?$,?"?$A
!?$"?:A?$A,
< <$
?"?.?9?.?.?.!,
"?.!$"
9?.?.!:A
.!$A,
!,,AA:0?!,
B;C
!
+ $-.
+ + +!
+ +$A,,,AAA , $
!+ +$,A ":9 $:,

MATLAB TUTORIAL 211
DB;C0
! $" :A $A,
+ + +! $, " $A
+ + +
0 E0
→ ∞
!,
→
!,
→
$, " $A
+ + +$
!,
(')'*
,
7F <G=0
*# #*# *
!+, , $ ,-.
!+$ $" :A $A,-.
!,/,,$/:.
+$0/$0-! 00.
0$
15 34 C ; 2
7 142
18 C ; 2
14
12
10
8
6
4
2
0
– 2
– 40 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
t Sec
Response to Unit-Step Disturbance Inputx 10– 3
Out
put t
o D
istu
rban
ce In
put

212 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
0
!
$,A ":9 $:,
$" :A $A,
+ ++ + +
!
$,A "9 $A,
$" :A $A,
+ ++ + +
(')'*
, 7
FH$F0<
*# # *
!+, $,A"9 $A,-.
!+$ $" :A $A,-.
!,/,,$/:.
+0/0-! 00.
0
15 34 5; 2
7 142
18 5; 2
1.4
1.2
1
0.8
0.6
0.4
0.2
00 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Response to Unit-Step Reference Input
Out
put t
o R
efer
ence
Inpu
t
t Sec
% "$#%#&'(&(01#
#.##" *#"&

MATLAB TUTORIAL 213
)1s5.1s)(5s)(3s(s
)5s2s(K2
2
++++++
–
+R(s) C(s)
I
!
:
: $: $
.
+ ++ + + +
!
: "
:
: 9 , $:
.
+ ++ + + +
'(')'*
$
H(')'*
!+, , , $ :-.
!+$ : 9 , $: ,-.
0
2!+#9 #: :-.72.71<2
15)B2
5
4
3
2
1
0
– 1
– 2
– 3
– 4
– 5– 8 – 6 – 4 – 2 0 2
Real Axis
Root Locus
Ima
g A
xis
$0 '
ω7

214 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
ω70 !ω<
:?:"?9?,?$:?.??:!,
ω:?:ω"?9ω?,?.ω?$:?.ω?:.!,
+:ω"#,?.ω?:.-?+ω:#9ω?$:?.ω-!,< <E0 0
:ω"#,?Iω?:.!, $
ω:#9ω?$:?.ω !,
<
ω!, ω"#9ω?$:?.!,
.!" 9 $:
− ω + ω −"
4 <"<$0
:ω"#+,?J#ω"?9ω#$:-ω#:ω"?F,ω#F:!,
,:ωA#ω"?:F:ω#F:!,
< (')'*
H(')'*
!+,: , # , :F: , #F:-.
-* *#3
!
#"F9A?$$:F#
#"F9A#$$:F#
"F9A?$$:F#
"F9A#$$:F#
,9$::
#,9$::
ω7ω!,9$::
.!" ,9$:: 9 ,9$:: $:
− + × −!$:9"ω!,9$::
.0 .
$:9"KIK,
%"$#%#&'(&(+3
#"
##.##"&

MATLAB TUTORIAL 215
K5s
3s
++
)3s(s
32 +
R(s) C(s)+
–
!I
:
++
+! "
9 $:
.
++ +
'(')'*
H
!+, , , $ -.
!+$ 9 $: , ,-.
0
2!+#A " #: :-.72.71<2
15)B2
5
4
3
2
1
0
– 1
– 2
– 3
– 4
– 5– 6 – 4 – 2 0 2 4
Real Axis
Root Locus
Imag
Axi
s
0I
7
0<
<
"?9?$:?.?.!,

216 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
4 !ω<0ω"?9ω?$:ω?.ω?.!,
ω"#$:ω?.?ω#9ω?.!,
< <E0 0
ω"#$:ω?.!, $
ω#9ω?.!,
<
ω!, #9ω?.!,
4 .<$0
ω"#$:ω?@9
ω!,
ω"?ω!,
ω!,ω!%4ω!<ω70 ω!<
.
.!9
ω!
9
@!"
0 .
"K.K,
%"$#%#&'(&((3
#"
#2*.* ##ζ#
#)&4
#
*# *2*#&
)5s)(3s(s
K
+++
–
(')'*
!+, , , $-.
!+$ 9 $: ,-.
0
2!+#A " #: :-.72.71<2

MATLAB TUTORIAL 217
15)B2
5
4
3
2
1
0
– 1
– 2
– 3
– 4
– 5– 6 – 4 – 2 0 2 4
Real Axis
Root Locus
Imag
Axi
s
Dζ ,LζL$θω7
jω
θ
ωn
–ζωnσ
Constant ζ line
0
θ!
ζωω
!ζ
'ζ!,A !#,F:?
,LL∞ . ζ ,A!#,F:?
<
!#,F:? $
??:?.!,

218 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!" #$ ! %$ &" ' ($)'#%
* *
*)
*
+++
*
,"& *
&
+*&*
-)"' # $'& ! '&*#)," !
,")" )) ""
,")#.#$$#) %"&##!/0,102$!
3 45
++
**
6)")#.#$$# #)
++*
," .$$&"%&) &"&##.!/0,102$! ," #! .$$) '"!
3 45
3 45
$
!
#78.-$9$:
;# #7-):
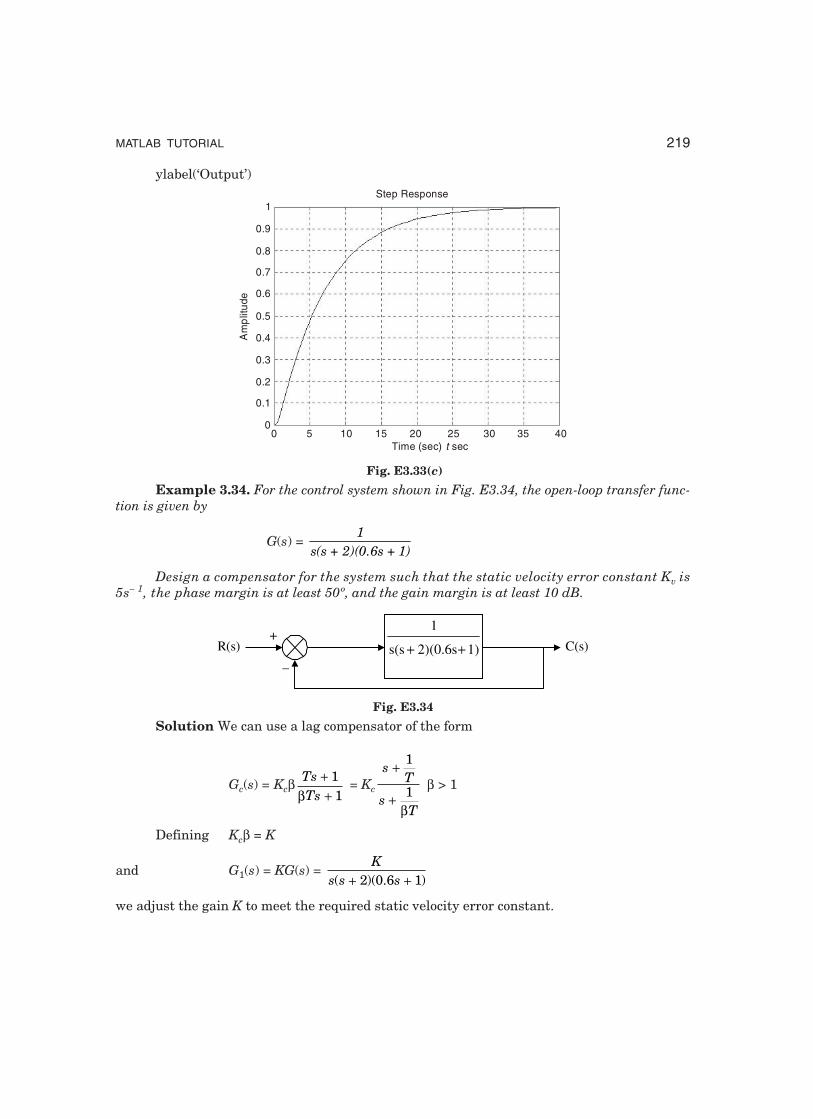
MATLAB TUTORIAL 219
%# #7< $ :
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
00 5 10 15 20 25 30 35 40
Time (sec)
Step Response
Am
plit
ude
t sec
!"##$"
%&
'(
) * +,)-. * (,
/#$%%
01(!0-2!(-
1)2)(0.6ss(s
1
++R(s) C(s)+
–
=) # !)$ &"&
'β
+β +
+
+β
β>
?&! β
''
+ +
@ "! " )'#)%)
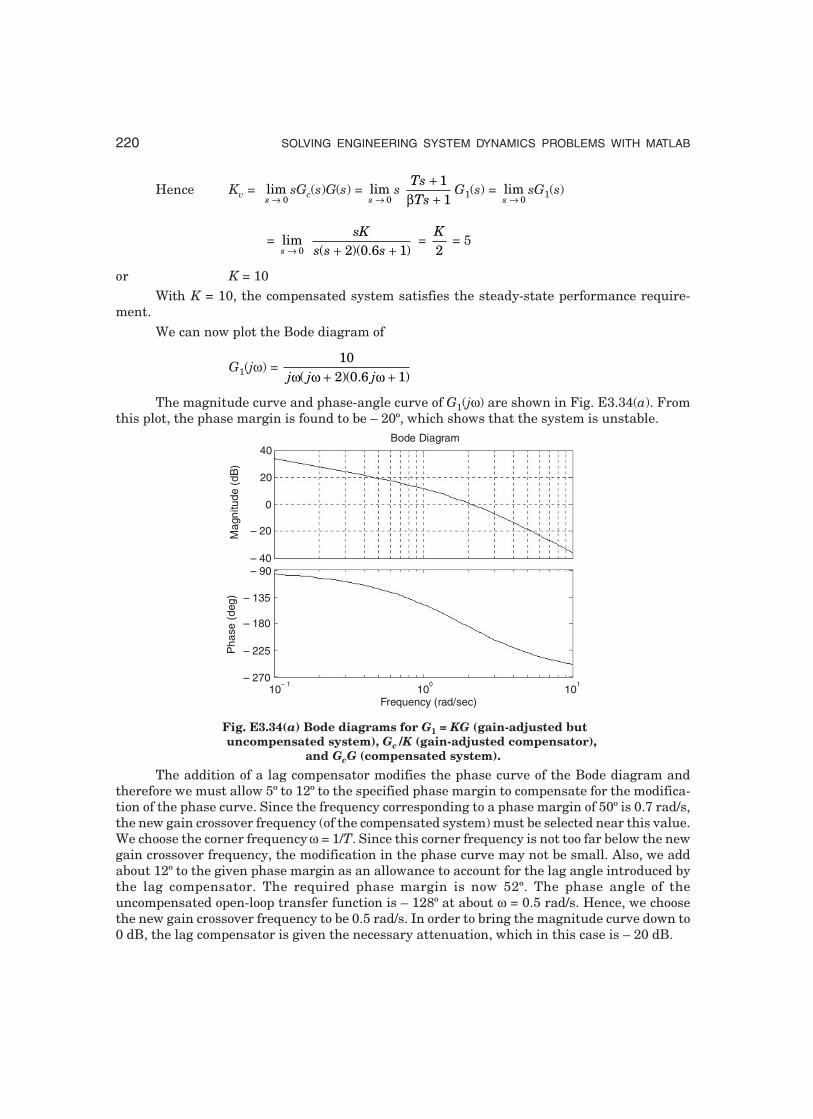
220 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
6) %
# →
''
# →
+β +
'
# →
'
# →
+ +
="")$ % &" %. $& ) .
=) $#"2 ! &
'ω
ω ω + ω +
," ! ) ' $" . !#) '&'ω "!*"$#"$" !& A")""" "% #
40
20
0
– 20
– 40– 90
– 135
– 180
– 225
– 27010
– 110
010
1
Frequency (rad/sec)
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
!" "
!
," & # !)$ &"$" ) '&"2 ! "& ##AA"$)&$" !)$ &"&) .&"$" ) '-)"& )%)$! $" !&A B"! )'& )%&")$ % #) "' # =)"")& )%ωB-)")& )%& #"! )'& )%"&) "$" ) ' % ##0# A"!'$" ! ## ) )) &"# ! !# )%" # ! )$ ," $" ! A ," $" !# & " )$ $.#$ && )A ω B6))""! )'& )% BC!" ! ) '2"# !)$ !'") % ")"") 2

MATLAB TUTORIAL 221
,"& #!
β
β,"")& )%ωβ,")$"$#&"# !)$ .
β B
6)" && )&"# !)$ !'%
'
++
+
+
-)"! ) #) # β " '
β
,"&")$ '
'
++
,"$.#$ && )&")$ %"&
''
++ + +
," ! $" . !#) '&'ω'ω "!*&
40
20
0
– 20
– 40– 90
– 135
– 180
– 225
– 27010
– 110
010
1
Frequency (rad/sec)
Bode Diagram
Mag
nitu
de(d
B)
Pha
se(d
eg)
100
50
0
– 50
– 100

222 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
,"$" !&")$ % A" ' # ,"! ! 2 ))$ #," )'#)%) ," ")$. % &" "" % "# ' #%
=" .$$ . $$&")$ % "! # )$ %,")#.#$ && )&").$ )$ % !'%
3
4
*
++ + + +
3
4
+ + +
$)'#%
0/0,102$! " .$ . $$&")$. )$ %!'#," #! .$$) ' . $$) ' "!* *$)'#%
D 8.$$
3 45
3 45
)3 45
)3 45
EE*5
354$ 5
354$ ))5
$#7:7:
!
#78.-$9$&F$ 8)$ -%:
;# #7-):
%# #7< $ :
;7F$ -%:
;78)$ -%:
6"
3 45
3 45
)3 45
)345
EE5
374$ 5
374$ ))5
$#7:7:7:

MATLAB TUTORIAL 223
1.4
1.2
0.8
0.6
0.4
0.2
0
1
0 5 10 15 20 25 30 35
Out
puts
Unit-Step Responses of Compensated and Uncompensated Systems
Compensated System
Uncompensated System
t sec
!
#78.9 $9$&F$ 8)$ -%:
;# #7-):
%# #7< $ :
;*7F$ -%:
;*78)$ -%:
20
18
16
14
12
10
8
6
4
2
00 2 4 6 8 10 12 14 16 18 20
Uncompensated System
Compensated System
t Sec
Out
put
s
Unit-Ramp Responses of Compensated and Uncompensated Systems

224 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
#"##$#$"#&8%&
'
) * ,) * 0,
/'),$%(-1(!
0-2!(-
=) # !.# )$ &"&
'
+ +
β β+ +
," $.#$ & & ) & " )$ % ''
# →
'" )'#)%) " '
%
# →
''
# →
'
+ +
,"&
0/0,102$! $#"2 ! !'# " ! "!
3 45
3 45
40
20
0
– 20
– 40
– 90
– 135
– 180
– 225
– 27010
– 1 100
Frequency (rad/sec)
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
– 60
– 80
101
102
##$%&''#(

MATLAB TUTORIAL 225
!"$" !&" )$ %A")""" "% #,! # !.# )$ )" ! )'& )%"$" . !#) '&'ω"$" )'& )%ω B=) #)"! )'& )% B )"" "$" .# !# ω B A0!## !.# )$ ) $'" &$" .# !#
=) &")& )&"$" .# !$&"# !.# )$ F"!")& )%ωB)$!"(&"$" .# !$&")$ ) #"! )'& )% ω B ")& )%ωBβ"' # &β,"' # &β) &") &"# $&")$
," ; $" .# !#φ!'%+αBβ" '!'
φ
β −β +
β)$φ*+A= A$" !) #)β6)
β,"")& )%ωBβ ω," && )&"$" .# !$&"# !.# )$
++
+ +
,"! )'& )%ω B G'G& 2,".&&"# !.# )$ ) 2 ω B""! )'& )% " $# !"#&#$2B) $ !" !""$2 B,")&"# ".2# 2#!'")& ),")& )&"# $ ω* B ω* B6)" && )&"# $&"# !.# )$ !'%
*
*
++
+ +
2%)!" && )&"# ! # $&")$ ) &" && )'&"# !.# )$ !
'*
*
++
++
+ ++ +
,"2 ! &"# !.# )$ ' %"&##!/0,102$! ," #!$#"!&
D
3 45
3 * 45

226 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
0
– 5
– 10
– 15
– 2090
45
0
– 45
– 9010
– 310
– 210
– 110
010
110
2
Frequency (rad/sec)
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
#)
,"$.#$ && )&")$ %
'' *
*
+ ++ +
+ +
*
+
** +*
+ ++ + + +
," ! $" . !# ) ' & " ! $.#$ & & )'' " "2 ! &!," ! !&##!/0,102$! H" " $#% # !")') &##E
3 * 45
&3 45
)'&
**+*
3 + 45
3 **+*45

MATLAB TUTORIAL 227
100
50
0
– 50
– 100– 45
– 90
– 135
– 180
– 225
– 27010
– 310
– 210
– 110
010
110
2
Frequency (rad/deg)
Bode Diagram
Pha
se (
deg)
Mag
nitu
de (
dB)
#*
!" "$" !! ! )'#).%) ## &
+
H '' *
*
+ ++ +
+ +
3
4
' '
' ' +
*
+
** +* +
+ ++ + + + +
," .$$ %"&##!/0,102$! " .$$) '"!

228 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!""#$ %&
1.2
1
0.8
0.6
0.4
0.2
00 5 10 20 25 30 35 40
Am
litud
e
1.4
15Time (sec)
Step Response
'()""#(%"*)*%(#""+,-'.-/'()""#012"3"(""#01'()"23"*)("+4566
"&
7!)!""#($ %&
8)*'2&
%)*-&
MATLAB TUTORIAL 229
20
18
16
14
12
10
8
6
4
2
00 2 4 6 8 10 12 14 16 18 20
Time (sec)
Unit-Ramp Response of the Designed System
Am
plitu
de
! " " #$
#%&
!$'
+ +
'()))#92% )0)())""# #"(
")"
.(#92%2"""()"#:6;<(),)"#*ω)(#"
∠(ω:6;
'(/"))("+4566=#",-'.-/")

230 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
20
0
– 20
– 40
– 90
– 135
– 180
– 225
– 27010
– 1
Frequency (rad/sec)
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
– 60
100
101
4"4566=(9())"#;)"22)(#92%ω=)0'()"#(ω)(#92%(:/'() ()#%
" /
" 6
) *)'+,',-.
!$ /#&0 10 /
23
'
K
s(0.1s 1)(s 1)+ +Gc(s)+
–
>"()2")"
α
+α +
+
+α
2 3):+()3
→
α
+α +
'
+ + α

MATLAB TUTORIAL 231
. )#?α ∧'(
∧
'(/"))"#
+ +
6
+ +
"*)*%(#""+,-'.-/")'(/"))("+4566
*"
50
0
– 50
– 100– 90
– 135
– 180
– 225
– 27010
– 1 100
Frequency (rad/sec)
Bode Diagram
Mag
nitu
de (
dB)
Pha
se (
deg)
101
102
4"4566(()))));)@/23%4")())"#;2
φ ;:;1;;'()8()); 2
φ
− α+ α
φ ;
α"*)).2(""α
'"(2"#92ω0)ω0α"#()2")"+"()()8()))φ "22)("2)"#(+"2"

232 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
#92"ω0 α '()""#("#2)"()23)
ω0 α "(2""#(10α1(3*%
(
( ω =α
+ ω+ ωα
α
2
α
@=@/
'()"#A(ωA:=@/+(2(2"""ω@)0'(#"+2()(+)2""3#92%ω
α ω B@@
α ω
α
@
=6
" @
=6
++
) ∧
α
C2
@
=6
++
=@
=6@
++
'(""")##2"
=@
=6@
++
+ +
6
6=
=6 =6
++ + +
'(2""")##2"
4
5
6
6=
=6 =6 =
++ + + +
'(#""+,-'.-/")"2("23)("+4566
6=
=6 =6 =

MATLAB TUTORIAL 233
7 !""#>") %&
8)* 2&
%)*D&
1.4
1.2
1
0.8
0.6
0.4
0.2
00 0.5 1 1.5 2 2.5 3 3.5
Am
plitu
de
Step Response
t sec Time (sec)
'(#""+,-'.-/")"2()"23)("+4566
6=
=6 =6 =
"
7!)!""#>") %&
8)* 2&
%)*7!)E) %D&

234 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
5
4
4.5
3.5
3
2.5
2
1.5
1
0.5
00 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
t Sec
Unit-Ramp Response of Compensated System
Uni
t-R
amp
Inpu
t and
Sys
tem
Out
put c
(t)
!6 * '7'
6
8
8
8
8
= @ @ 6@
− − − −
6
8
8
8
8
1
6
8
8
8
8
9.'(#""+,-'.-/")%(""#(3%'("23("+4566@
:=:@:@:6@
4
:
4:

MATLAB TUTORIAL 235
8)* 2&
%)*D&
'("("+4566@
350
300
250
200
150
100
50
00 10 20 30 40 50 60 70 80
Time (sec)
Step ResponseA
mp
litud
e
t sec
!
)%+(4:)+"*)(")("+4566@
20
15
10
5
0
– 50 10 20 30 40 50 60 70
Time (sec)
Impulse Response
Am
plitu
de
!
"6 * '
4
5
,
,# " -
" # " ,; " -

236 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
-,-'.-/")""*))))2)""#(%3*"+
FF6
FF6=
FF
')##2"
61
G61G16=1
FF0040:
::6=:
4
6
:
4"(,-'.-/"+"*)(#""+))29)"
6
8
8
8
6=
− − −
6
8
8
8
1
6
6
8
8
8
1
#$5 *)'+,'/%
'
)8s()6s()4s()1s(
)5s()3s(10
++++++R(s) C(s)+
–
#$

MATLAB TUTORIAL 237
H <
()3))*#"&
&
IJ:6::::=:@
'&
'#*)2J:
))=&
>""2)"2)#")"&
4444:4
#4
<()3))*#")"&
#
#4
4#44
,")#"&
&
IJ:6::::=:@
&
#*)2J:
))=&
>""2)"2)#"&
4444:4
,")#"&
4:2)"4444:4")&
>""
)
()3))*#"
)
K"0"0)
161
111=1@
)
K"0"0)116
1=1G1@@16

238 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!"
#$ %
#$
&'"'( )
#*$#*$
#*$#*$#*$#*$

MATLAB TUTORIAL 239
#$
&'"'( )
#*$#*$
#*$#*$#+**$
%
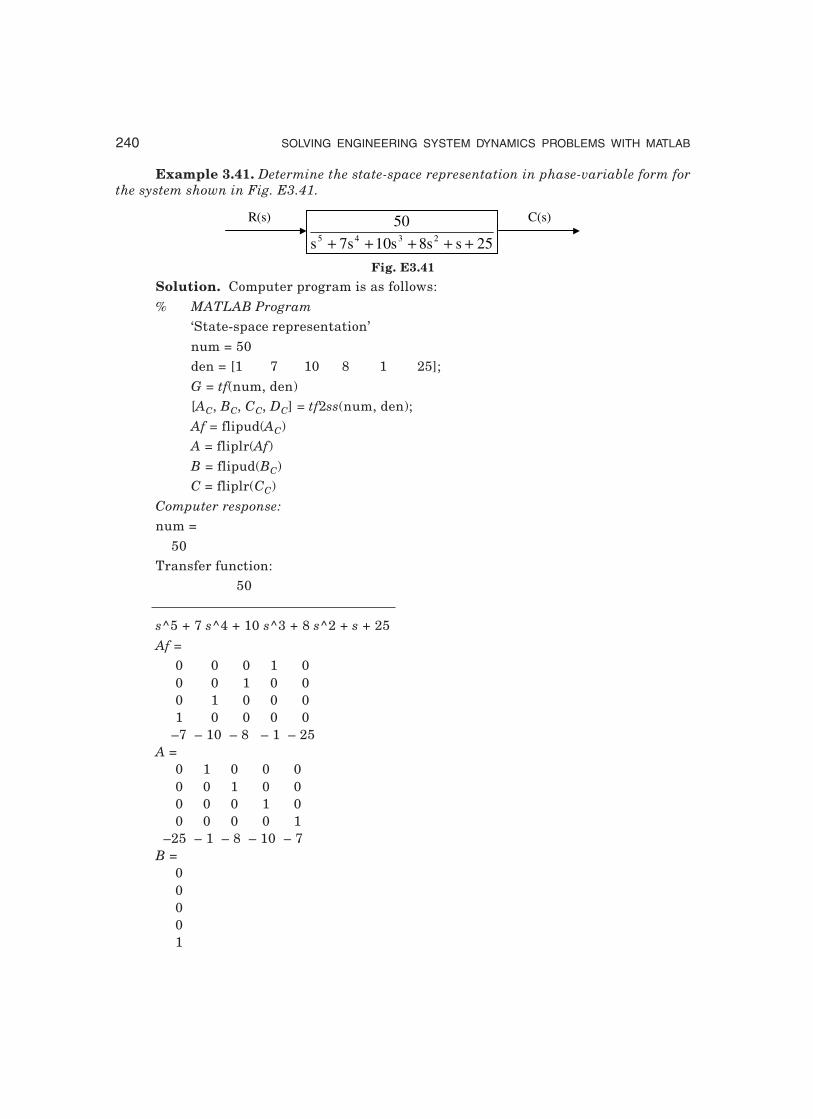
240 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!
25ss8s10s7s
502345 +++++
R(s) C(s)
","( -)
" #$%
./"" 0
,
1 23
#,4$
14442 #,4$3
",#$
"#$
",#$
"#$
& '
,
5, )
+*+*+*+**

MATLAB TUTORIAL 241
(#$) *& + & & *&
,
8s9s3s7s
7s5234 ++++
+R(s) C(s)
#$
2345
234
s7s5s9s
8s7s12s3s
+++++++
R(s) C(s)
#$
#$,12
,
12
#,4$
5, )
*
+*+*+**
14442 #,4$3
",#$
"#$

242 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
",#$
"#$
,123
123
#,4$
5, )
+*+*+**
+*+*+*+
14442 #,4$3
",#$3
"#$
",#$
"#$
+ & &#$
!
,
-
-
-
. ! .
/ , .
. , 0
!
,
-
-
-
*
. .
!
/ .
&

MATLAB TUTORIAL 243
! . .
. . !
!
,
-
-
-
5, 6 ( !7
#$112
-
− − −
−
8 #$
− + − +
−
99"#$%
997
991323
99#13*3*23
9913323
99: ##$:
1'#+*:*$4 '#+*:*$2
1:'#+*:+*:*$*'#*$4:'#+*:+*:*$2
++ *& '
-
-
2
!
,
− − −
!
,
-
-
3!
&
24! ,5 !
,
-
-
+ & 67 &#$
− − −
1 2
5, #$7
#$#1$1 2
+ − +

244 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
1 2
1# $# $ 2 + + +
+ − +
1 2 + +1 2
+ +
+
+ +
1 2
1 2
99"#$%
991323
991323
99123
993
991,42 #444$
,
5, !
& 6728679:67)
-
. ; .
. . ! .
. . . !
/ 0 < /
− −
-3
.
/
;
,
21!0/2-
133323
133323
123
3
"#444$
----
-
-
-
-

MATLAB TUTORIAL 245
&
-
-
-
-
----
+
&
,,
14442 #,4$3
2 6&)+7
5, )
+*+*+**
+*+*+*+
& + +
&#$
-
< !
, .
0 = ,
− − − −
*
!
,
&6 7
24,<>!,5-?-6.72
.
.
.
"#$%
991332
991332
9912

246 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
99
991,(4(2 #))))$
,(
*:
(
992 6&)+7
5, )
+*
++*
99"#($
"
: ;&#$
#$
#$ +
)9s)(7s)(5s)(2s(
)6s)(4s(10
++++++
R(s) C(s)+
–
;#$%
#$. !0
.#$0
@A#124124$
.#$0
!<#44$
1,42#4.B0$3
. 0

MATLAB TUTORIAL 247
14442#,4$
",#$3
. !" 0
%B "#$
%B ",#$
%B "#$
.#$%0
.#$0
="<#124124$
.#$0
!<#44$
1,42 #4.B0$3
. 0
14442 #,4$
.%0
144422#4444.0$
",")
#$ !
>
#$
&'"'( )
#*$#*$
#*$#*$#*$#*$
>
#$
&'"'( )
#*$#*$
#*$#*$#+**$
>

248 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!""# $
% %&
% % % %
!""# $
%& %
%& % '%%&
() )

MATLAB TUTORIAL 249
&
&
&
&&&
! "# $
%
& ' (
( ) *
( ( +
− − −
%
, -( * *.%/ %"(# ,
(
(
(

250 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
**+,,-,
**+,,-,
**+-,
**,
**0...
%%%
%
%
%
%
%
%
%%%
(//01
**0
0.7
0.6
0.5
0.4
0.3
0.2
0.1
00 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Time (sec)
Step Response
Am
plitu
de

MATLAB TUTORIAL 251
*
'
%
%
( *
+( 1
− −
%
%
%* *
( *
*
'
*
'
* (
( *
%
%
- *! '.
$
2 311 # / 1/
** 2
**+,-,
**3+,-,
**(+,-,
**4+,-,
**1...
0
– 50
– 1000
– 45– 90
– 135
– 100
0
100
180
0
– 18010
010
110
210
310
010
110
210
3
From : U(1) From : U(2)
Bode Diagram
To :
Y(2
)To
: Y
(2)
To :
Y(1
)To
: Y
(1)
Ph
ase
(deg
) ; M
agn
itu
de
(dB
)
Frequency (rad/sec)
34
*
'
%
%
( *
+( 1
−
%
%
%(
+(
, -* (.
%
%
5 -(.
$
5)6 #/ 1 #//. 768/
) 16/#) 168/... 68/....

252 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
**9:2;3#
**+,-,
**3+,-,
**(+-,
**4+-,
**68/.3.(.4
**#1
**<768/=
0.8
0.6
0.4
0.2
0
– 0.2
– 0.4
– 0.6
– 0.8
– 1 – 0.5 0 0.5 1Real Axis
Nyquist Diagram
Imag
inar
y A
xis
!
*
'
%
%
* *
1 (
− −
%
%
%* *
* (
*
'
*
'
* (
( *
%
%
%( (
( (
$
6
*
*
"7 #
"7 #
ωω
! '
*
"7 #
"7 #
ωω
! *
'
"7 #
"7 #
ωω
! '
'
"7 #
"7 #
ωω
34 * ' 8
6 6$
2/11/ 16/#:2;3) 168/
...
**9:2;3#
**+,-,

MATLAB TUTORIAL 253
**+,-,
**+,-,
**+,-,
**68/...
0.5
– 0.5
0
2
0
– 2
– 1 0 1 2 – 1 0 1
From : U(1) From : U(2)Nyquist Diagram
Imag
inar
y A
xis
To :
Y(2
)To
: Y
(1)
Real Axis
!
"9 ! !
*
'
%
%
* *$&
' (
− −
%
%
5 *$&
(
, -* (.
%
%
$
**2:
**+,-,
**+,-,
**+-,
**+-,
**+.%.-... ,
**.
**#1
**<>0=
**? <5)=
**6 <@//=

254 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
0.6
0.5
0.4
0.3
0.2
0.1
0
– 0.1
– 0.2
– 0.30 2 4 6 8 10 12
t Sec
Unit-Step response
Out
put
"#$%&
**2:
**+,-,
**+,-,
**+-,
**+-,
**97A #1 1//8/
** +B. ,-,
**+,-,
**+-,
**+-,
**+8.%.-... ,
**%+-C%=,.%...<=
**#1
**<>0 =
**? <5)=
**6 <@// 1/0 /=
**?..<@//=
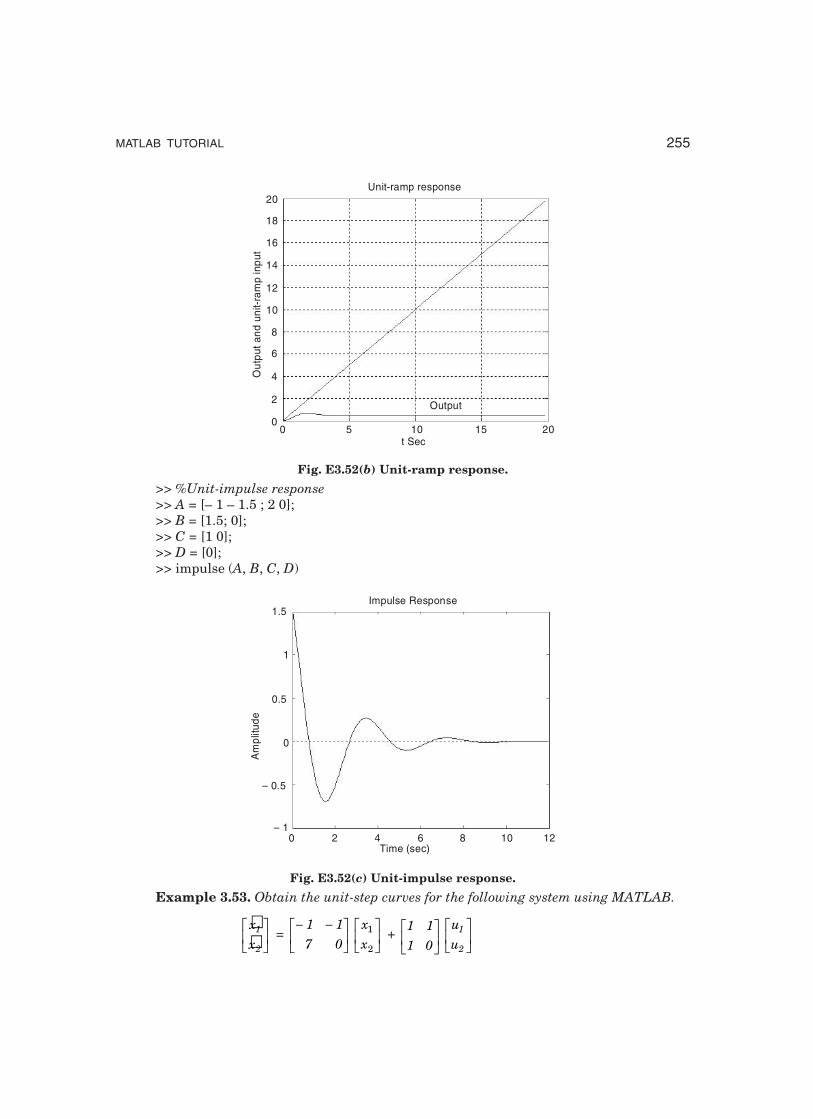
MATLAB TUTORIAL 255
20
18
16
14
12
10
8
6
4
2
00 5 10 15 20
t Sec
Unit-ramp response
Out
put
and
unit-
ram
p in
put
Output
"#$%&
**2:
**+,-,
**+,-,
**+-,
**+-,
**/...
1.5
0.5
1
0
– 0.5
– 10 2 4 6 8 10 12
Time (sec)
Impulse Response
Am
plitu
de
"#$%&
9 6 $
*
'
%
%
* *
1 (
− −
%
%
%* *
* (
*
'

256 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
*
'
* (
( *
%
%
%( (
( (
*
'
**2
**+.,-,
**+,-,
**+,-,
**+,-,
**...
From : U(1) From : U(2)
Bode Diagram
To :
Y(2
)To
: Y
(1)
Am
plit
ud
e
0.4
0.2
– 0.2
– 0.4
0
2
1
0
1.5
0.5
0 2 4 6 8 10 12 0 2 4 6 8 10 12
Time (sec)
9
$
*
'
+
%
%
%
,
& '& &
* ( (
( * (
− − −
*
'
+
%
%
%
5
*
(
(
, -( '& &.
*
'
+
%
%
%
5 -(.
**2
**+,,-,
**+,,-,
**+-,
**+-,

MATLAB TUTORIAL 257
**+.%.-... ,
**.
**#1
**<>0=
**? <5)=
**6 <@// =
1.4
1.2
0.8
0.6
0.4
0.2
0
1
0 1 2 3 4 5 6 7 8 9 10t Sec
Unit-response
Out
put
y(t
)
#$%&
: ;
& '& & (
* ( ( (
( * ( (
( '& & (
− − −
(
(
(
( '& & (
B. ,-
*
( ,
(
( (
+( '& & (-+ (-
**2
**+,,-,
**3+,,-,
**(+-,
**4+-,
**+B. , -,
**+,-,

258 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!"#$ !
%#&'(
)#&*!+#!++
5
4.5
4
3.5
3
2.5
2
1.5
1
0.5
00 0.5 1 1.5 2 2.5 3 3.5 54.54
t Sec
Unit-ramp response
Inpu
t and
out
put
! "#$%&'
(#$%&
,-
&..
.

MATLAB TUTORIAL 259
#!/&&0.&
#!
,
#!/0.
#!
,
#!/&&0.&
#!
.
1$2#&34& 3 2# 2 ) $ # (!#&&+! ($)& 3#&* ++(!#&
!
$)
* +
! "#$%&
, ) ")
#$%&'
(#$%&
,,.
#!/----0.-
#!
,
,,.
,.
#!/----0.-
#!
,
1$2#&34& 32#2 ) $ & 3#&#!(!#&

260 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!" , . !).
− − − − −
* +
") !) #$%&'
52(!#&)#!& 3#&)62 ) $(#!&&#!&)%#$!"!2#!/(!!6
! "## #′′′′′!
(#$%&
77,7.7.7
&,
#!/&&0.&
#!
,
#!/----0.-
#!
,
8& 32#!/6&&.& ,#!2#!/6 #$# $#! ,2 ) $ ($) #(!#&#!& 3#&
% " ,#$%&'
/
0
1
− − − − −
−
*2+
(#$%& 3
797:7.7;7,-
&7-.
7,

MATLAB TUTORIAL 261
!!3
&!!3&
!!3
$+ !
!!3
!
.-<:.=:777<
7<.-7:.=:77
<77=7
&!!3&
&!
;,=9<..:
;,=97..:
,,.-<
!
7.-,.-<-,:
7.-,.-7-,:
.:=,<
& "" ,#$%&'
4
− −
..797..>6!2$#%#&3
>#(+#2!3#+ 6$#%
#!
.
.<,-.9;
.7,-.9;
'5" ,", !) " "! 6 ) ) 7!" !8 ) 98:, !#$%&'
− − −
4
0
* +

262 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
.=7.7-7:>6!2$#%
&.>6!2$#%
>6!2$#%
;
;&>## #" #($
$
$1&#(/;
?!3#+ 6$#
##$>## #" #($
$>$!?!3#+
#!
#!
7;;9.
7,:-<;;;
7,:-7;;;
52( ) $ #&# 2!+$& ##!#342# 2#% (!# ) $+ 6@+2"A+4BC#33#+ # #& 33#+ #+!" #&
(5" ,) " "! 6 ) )8 7! " !8 ) 98:, !#$%&'
/
0
− − −
* +
(#$%&
9 7, 7- 7:
& .
;
;&
$
$6&#(/;
?!3#+ 6$#

MATLAB TUTORIAL 263
##$
$
))
#!
;
.,
.
,7,7-7
.
,
.,
!
!!++ "$$
#!
$
. ,
. 9
, 7, 7: 7;
.
, .
.,
!

264 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
8! 3
#!
?!3#+ 6$#
#!
79.
7,---<--,9
7,---7--,9
)* +
)( < #$%&)")
8! ) !" , ,5'=>''
)) ", '
m
k c
x(t)
y(t)
)( ",,"+-./ *
52$#!+626D+!() ! 3!#
EFωE G ... .
.
ω ω − + ζ ω ω
52$#!+6Hω 3!#
EHωE G ..
.
ζω + ω EFωE
42@ω
Hωω
522# #!φ 3!#
φω#!7
,
. .
.
.
ω ζ ω
ω ζω − + ω ω

MATLAB TUTORIAL 265
526D+!()#
ωω
52!!"$! !# ! $#!+ 3!# 2#! $ &)
EH E
ω
.
. .
.
.
ζω + ω
ω ζω − + ω ω
# !2 D+#! I5J ( 4!# 64
*'?'?'?'?'?'?'+?(! )"
*3'3+?(".
" 63 @ A
;@673A.@@@B @6ABA'CA'D@@2'CA'C@B @6ABA'CAA?
)@673A @B @6AB'C72'C@B @6ABA'CA?
!
"@A
) @7;A
@EF DF GEA
@EH@F AHDEA
!
!@EF G'E7EF G'E7EF G'E7EF G'E7EF G'E7EF G0
'E7EF G/'EA
"@A
) @7)A
@EF DF GEA
@EF)@F AEA
!
?
@ 7E6E7*3)D3)+A
@ 7E6 E7I*+?E)DE?E)EJA
!@EF G'E7EF G'E7EF G'E7EF G'E7EF G'E7EF G0
'E7EF G/'EA
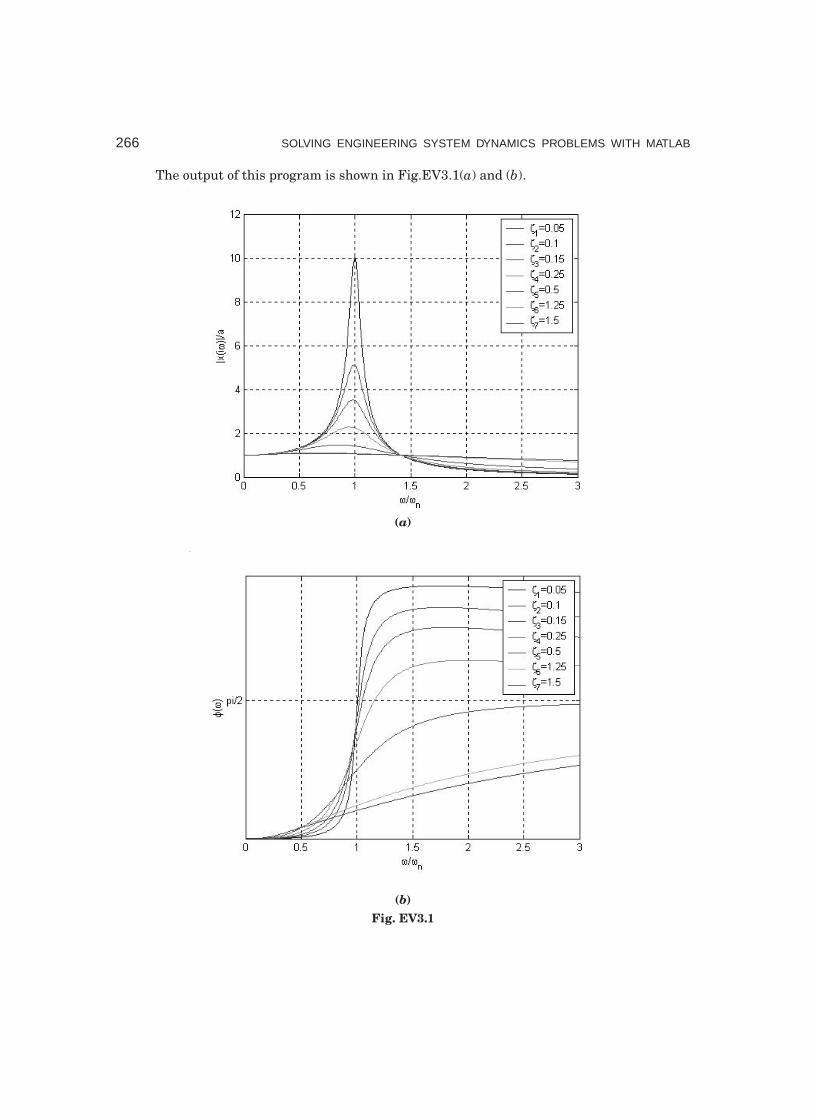
266 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
52++62 #$ 24!!1?K, #!
)(

MATLAB TUTORIAL 267
) )")" ! )! !""!8@5'=>'A !) !
@A2ζω@ω!2φA, !φ) ) ! !) ")7)
!
ζω ω
7φ 2
!
ζω ω
!ω! − ζ ω'
m
k c
x(t)
)
)" #$%&" ω !D7 ζ '7'7'K! !@A7 0D'
"
,?(L ".
*'?'?'+?( )
?(M !)
0?(M
?(M
! '?($)
"0?(5
*3! 3"+?
"3 @ A7
,!.@8 @ACAB,?( )!".
)@8 @AB,BA'B@@@ @AB,BAD,!AB@,!BAB@,!BAA?
) @7A
!
!
@N9) -A
@N*+-A
@N@A-A

268 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!
52++62 #$ # 64
Response to initial excitations15
10
5
0
–5
–100 1 2 3 4 5 6
t(s)
x(t)
)
) )" =>'#$%&"ω !D7
ζ'7'7'K! !@A7 @A0D'
2#!!2#$ 2)42B#,.
Response to initial excitations4
3.5
3
2.5
2
1.5
1
0.5
00 0.5 1 1.5 2 2.5 3
t(s)
)
ζ=0.05
ζ=0.1
ζ=0.2
ζ=1.3
ζ=1.5
ζ=2.0

MATLAB TUTORIAL 269
) )" =>'#$%&"ω !D
!ζ'K! !@A7 @A0D'
Response to initial excitations4.5
4
3.5
3
2.5
2
1.5
1
0.5
00 1 2 3 4 5 6
t(s)
x(t)
)
) <#$%&)") !"".)" , ! ,5'=>''
M-m
k c
me
ω
) ",,"+-.
00 0
1 252$#!+626D+!() ! 3!#
EFωE G ... .
.
ω ω − + ζ ω ω 52$#!+626D+!() ! 3!#
EFωE G ... .
.
ω ω − + ζ ω ω

270 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
6 ξ...9.ωGω,! 6
14!I5J#$ 3
*'?'?'?'?'??'?'+?( )"
*3'3+?(5.
"63 @ A7
;@'CA'D.@@8'CA'C@B @6ABA'CA?
) @7;A
!
!
@NF DF G-A
@N@IF DF GJACH;@MF AH-A
!
1?K,# 24 2++62#$
)
1 24!! !2(+3 %($$#!(#!&$)
) !""!)8 K! ! ),5'=>'0'
mk
W
)t(x
Fd = µkW
)

MATLAB TUTORIAL 271
$) " 0676OLD7µ'
!µ6''$ ! @A'7 @A' )@A#$%&'
$ !" ) "!
"!!5
6 6
6
µ
M"! "8 K) "7 ".
2@2A"!P
"
µ+ µ
"!
,µ """"
µ66""""
5264!I5J#$(#!&3
0?(#
6?(Q""
'?(Q """
6'?(R"""
'?(M !)
?
! '?($
,.@6DA?(L ".
"!B6BB4'1D6?
L @'B@@8@D6AB"!AD"!AA?(: "
*+?
*+?
"LS
"3L7
*3! 3)D,+?
@8@B8AB"!AB@,BA"!B@8AC@A?
*+?
*+?
)D,?
!
!
) @777"!B@ @AA7E88E778"!B@ @AA7E88EA
@E9) EA
@E*+EA
@E@A*+EA
!

272 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
52++ 24!!1?K,:
)
) < #$%&)" )" ! )! !""!"5@A52α@A " '$) ,5'=>'/,$'!'
tTO
F0
F(t)
)30
T ) )!"$' !" ) '$) " 67LD760LD75L7 !α'$) )" 8! ))
@A
! ω −ζω ω!@A
?(
?(! )
60?(""
5?(5 ) !
$'?

MATLAB TUTORIAL 273
,.@6DA?(L ".
D@B.@B6AA?(! )"
$'?( ) )!
L?( )
,!,B.@8 CA?(! )!".
"3L7
"P$D$?5@A5? 5@A?!("
!
*3L+?
$B)@2@2AB B,B$A'B@@8AB,!B$AD@B,!A?
(!8) )
@57A?(
@3LA?() L )
*3L8+?
@N)-7*'''1'/+A
) @77N'-A
@N9)9 ) -A
@N-A
@N@A-A?
!
52++ 24!!1?K,9#
)
)% ) "! !""!! " ),5'=>'1'$ ! 8 )!, ) !" ),5'=>'1@ A7@A'$ " D76767LD7 !ζ'')" '

274 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
m
k c
v h
πξ−
dcos1 2
h
d
ξ
)%," ", )%)" ,"
*" ",*
)%*3"0
@ξA !
πξ − 2@ξ2!A
A.$!$#!6(! #! #+$& ξ523(# #($!62#+$&42 3!&)
@A
!
πν −
!
− − ν
52 ) $ ! # (!3+!!#
@A2.
ζω τ + ω τ∫ @2τA!τ
52423()&($
.!
πν
!
πν
!
− − ν
I5J#$62 3!&4
(Q) "!8!8"8"!! " )
(> ) !! ! !! )
(@A@2@@)BBDAACAB@@A2@8!DAA
( ! )

MATLAB TUTORIAL 275
())
!@A
"
?
6?
'?
'?
!'?
?
() !
G.@6DA?(L ".
G! GB.@8 CA?(! )! ".
)D!?
(, !) !
(#$%&N: !-")"
B@8@BBACAB@8@E: !@8'AEAA?
!BB@BBB AB@8@N: !@ 8'A-AA
(
)@8 B GB@8 AA'B@ G!B@8 AAD@B G!A?
2B BB GB!B?
2 GCBBB?
) @7A?
) @7A?
M@ 7 77A?
M ) @M7A?
M@ 7 77A?
M ) @M7A?
M M ?
) @7A?
!""@A?
!""@ A?
) @7'7A?
"3
@77@AA?
@A) @A?
!
)! @ A?
) @7)7N2-A?

276 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!?
@E@AEA
@E@A*+EA
52++62 I5J#$ 3!!1?K,;(
)%0
)& 5'=>'4,,!6" ) " M !M! ", "";U !;U'L " "'
)&
V !"" . "" !) "!6
". ! !""MMM7;U;U;U7 !
A V )".#@A7 !#@A#2α
!
! V )".#@A7 !#@A#2α
V !)".#@A7 !#@A#
2α#$%&'

MATLAB TUTORIAL 277
I1I2
M1(t)M2(t)
θ1(t) θ2(t)
k2[θ1(t)– θ2(t)]k1θ1(t)
)&
52D+#! 6$!#3!&)
* θI76θ</.θ.7θ
*. .θI.76.θ.7θ
826FL
J
.
@##!!?D4
* θ< .
.
FL FL<
J J
θ7.
.
FL
Jθ.I
*. .θ7.
.
FL
Jθ<
.
.
FL
Jθ.I. .
*!$#%6$4(#!4
.
*
*
.
θ θ
<
. .
. .
. .
. .
FL FL FL
J J J
7 FL FL
J J
+ −
.
θ θ
.
I
I
,
!!
FLFL.FL**.*JJ.J -
2D+#! 6$!62 ) $?D,(#!&4!#
I θ<Mθ
82I*MFL
J
θ
.
θ θ
:
#2$# $#% 66! $#%#!(!6+#!3( (3)5263&#! +!(#!&4!#
θΘω. 9

278 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
42ω 26D+!()6 (#!#!ΘΘΘ.5 #3(6(! #! 42#3
.
7
−
.
Θ Θ
λ
.
Θ Θ
λω. *JFL
;
52(2##( (D+#!(#!&4!#
. 7
λ −− − λ
λ.7,λ< =
52!3#+ #3!&)
.
λλ,
.
.
52!#+#6D+!( #3!&)
ω:; FLG*J ω.:; FLG*J
!2$#3(( !!λ&)ΘΘΘ.52$#3( 6$2$#%D+#!#
.
7
−
.
Θ Θ
λ
.
Θ Θ
,
.
−
.
Θ Θ
.
ΘΘ
:;
,
*!#'$#4#)&)!Θ.Θ.Θ..542#3
.
7
−
.
..
Θ Θ
λ..
..
Θ Θ
,
.
+ .
..
Θ Θ
-
Θ.Θ.
:;
52$#3( # 24!&4
ω1 = 0.6180√(GJ/IL)Θ1
1
0L 2L
x
ω2 = 1.6180√(GJ/IL)Θ2
1
0L 2L
x
–1
)&* )&0

MATLAB TUTORIAL 279
52D+#! 6$!#
I θ<MθI :
42 I*
MFL
J
.
7
−
θ
.
θ θ
I
.
I
I
9
52 +!θ 3!&)θηΘ<η.Θ. ;
42η#!η.#$#(!# #!Θ#!Θ.#$#3( 52$#D+#"! (#!&4!#
′ η<′ .ω ηC′.. .η<′..
.
.ω η.C. =
42 ω, FL
. *J
−ω.
, FL
. *J
+.
52!#+#6D+!( #3!&)?D.
Θ
.
+
Θ.
.
−
.
52$#3( #3!&)?D.
′ 5Θ IΘ
5
.
+
*
*
.
+
.
+*
′.. 5.Θ IΘ.
5
.
−
*
*
.
−
.
−* ..
52$#$# (66(! #3!&)?D..
C5Θ I
5
.
+
.
I −α
.
+I.
7α
C.5.Θ I
5
.
−
.
I −α
.
+I.
7α .,
52$#6( #3!&)?D.,52 +! η#!η.62$#D+#"! #4!!26$62(!3+!!#

280 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
η
′ ω
C !
!− τ ω τ τ∫
. .
++ α + ω
.I
*
7
( ! α α− ω − ω ω
η. . ..
−− α + ω
.I
*
7 . .
.
( ! α α− ω − ω ω .-
42ω#!ω.#3!#&3A!(2 ! (#!&4!#
θη<η.θ.
.
+ η<
.
−η. .
!52D+#! 6$!#
I θ<MθI .:
42 I*
MFL
J
.
7
−
θ
.
θ θ
I.
I −α
.9
+$!# +!626$
θηΘ<η.Θ. .;
!42(2η#!η.#$#(!# #!
Θ
.
+
Θ.
.
−
.=
#2$#3( 52$#D+#! #3!&)
′ <′ .
ω ηC
′.. .<′.. .
.ω η.C. ,
!42(2ω, FL
. *J
−ω.
, FL
. *J
+,
#2!#+#6D+!(
′
.
+*′..
.
−* ,.
#$#$# (66(!
52$#6( #3!&)
C
.
+I.
7αC.
.
−I.
7α ,,

MATLAB TUTORIAL 281
52 ! 3!&)
θηΘ<η.Θ..N ,-
42 η
C
6
6∑ 76
η. .
C
6
6∑ .76.N ,
#2 ("$$#(!# 3!!26$6(!3+! +$ !42(22 ($$+ ! #3!&)
5
′ ω !ω5. ,:
425 2 #$!52 ("$ ! 3!&)
θ5 . . .
.. .
C C ! 5 ! 5
6
6 6 6 6
=
− ω Θ + − ω Θ ′ ′ω ω ∑
.5I
G FLG*J
7 5
9.,:9FL ! :;,- 5
9;.*J
6
6
6α
=
−
∑
<7α65 !76:;,-.9:,=,FL
59;.*J
−
,9
!!FL
*J .I
*α#!5 2 ! 3!&)
θ
.9:,=, ! :;,-
9;.
6
6
6−
=
− − ∑
< !:;,-7659.,:9
9;.
,;
52 ("$ ! D+!( 3!&)
θ
θ9.,:9
! :;,-9;.
< !:;,.9:,=,
9;.
−
=
;..=
====
−
−
×
×

282 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
θ. 9.,:9 ! :;,- . ! :;,-
9;.− × +
< !:;,O.<7 !:;,.9:,=,
9;.
−
;
-
--=9
.==
−
−
×
× ,=
52 ! θ. !1?K,=!&#!6$264!I5J#$
(9)"8!""!
"
M?(
6?(;UD% ""
#MB*?+?(
R6B*8?8+?(""
*7<+@R7#A?( )
(<
@37A@37AD @@37AA?(
@37A@37AD @@37AA?
*,@A7M+@ @<AA?( "
*,@A7M+ @ @<AA?
,@A.@,@AA?(%, ".
,@A.@,@AA?( ".
T@37A@37MA?( "
T@37A@37MA?
T@37AEB#BT@37A?( .
T@37AEB#BT@37A?
$'?( ) )!
L?( )
#?(!!6. ) !
) ?
*3L+?
LT@37AEB*@7LA?#B)@8 ) BB$A+?(! "
LT@37AEB*@7LA?#B)@8 ) BB$A+?
$B@@8AB,@AB$AD@B,@AA?(!) )
$B@@8AB,@AB$AD@B,@AA?

MATLAB TUTORIAL 283
@L7A?(
@L7A?
T@37AB@3LAT@37AB@3LA?(L ) ")
*3L8+?
@E)E7*'''1'/+A
) @7 @73A7E'E77 @73A7E'EA
@E9) EA?
@7E5L E7E$E7E5QE7A
@EEA
@7E5L E7E$E7E5QE7A
@EF G@A7F G@AEA?
@7E5L E7E$E7E5QE7A
!
* ++ 24!!1?K,=
)&"
)(' V )"" =>'4 θ@A7
θ@A'7 θ@A'1 G;U M 7 ! θ@A' )"
#$%&'
52!#(!! #3!#
θθ. θ;FL
*J .θ
1$P&$K,=42#3
ω:;FL
*JΘ
.
Θ Θ
Θ
:;

284 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
ω.:;FL
*JΘ.
.
..
Θ Θ
Θ.
:;
.
52 ! 2!#%(#! # + !62!#+#$ A!(
θ( ω7φΘ<.( ω.7φ.Θ. θ( ω( φ< !ω !φΘ
<.( ω.( φ.< !ω. !φ.Θ. ,
#! θ ω !ω( φ7( ω !φΘ7.ω. !ω.( φ.7( ω. !φ.Θ.
*62!?D,&($
θ
.
θ θ
( φ
.
Θ Θ
<.( φ..
..
Θ Θ
θ
.
θ θ
ω !φ
.
Θ Θ
<.ω. !φ..
..
Θ Θ
-
1$?D-42#3
( φ.. . .
E E
Θ θ − Θ θΘ
.( φ. . .
E E
Θ θ − Θ θΘ
!φ.. . .
E E
Θ θ − Θ θω Θ
. !φ.
. .
.E E
Θ θ − Θ θω Θ
42θθθ.θ. θ θ .θ .θ#!EΘE 2$!#!62$#%
Θ .
. ..
Θ Θ Θ Θ
:
J!ΘΘ.
( φ7
E EΘ.( φ.
E EΘ
!φ7;
E EΘ. !φ.7
;
E EΘ
EΘE
:; :;−7..,: 9
52 ! 23!!#%(#! 3!&)
θ
.
θ θ
..,:
( ; (
:;
ω + ω
<7( ω.<; !ω.
:;
−

MATLAB TUTORIAL 285
&)($!!
:9;FL FL
( :; ( :;*J *J
−
<;:FL FL
! :; ! :;*J *J
+
θ.;-( :;FL
*J<,. !:;
FL
*J
<--:( :;FL
*J7-=9 !:;
FL
*J ;
52I5J#$ # 64
()" ,8!8""!
"
M?(
6?(;UD%""
#MB*?+?(
R6B*2?8+?(""
*7<+@R7#A?( )
(< "
@37A@37AD @@37AA?(
@37A@37AD @@37AA?
*,@A7M+@ @<AA?(
*,@A7M+ @ @<AA?
,@A.@,@AA?( , ".
,@A.@,@AA?( ".
T@37A@37MA?(
T@37A@37MA?
*?+?(M !)
*B.@6DMA?+?(
*3'3+?( 77"
(!)
@@@T@7AB@A8T@7AB@AAB@,@ABA@T@7AB@A8
T@7AB@AAB@,@ABAD,@AABT@7A@@T@7AB@A2T@7AB@AAB@,@ABA
@T@7AB@A8T@7AB@AAB@,@ABAD,@AABT@7AAD!@TA?

286 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
@@@T@7AB@A8T@7AB@AAB@,@ABA@T@7AB@A8
T@7AB@AAB@,@ABAD,@AABT@7A@@T@7AB@A8T@7AB@AAB@,@ABA
@T@7AB@A8T@7AB@AAB@,@ABAD,@AABT@7AAD!@TA?
@E)E7*'''0'+A
) @777A
@E9) EA
@EF G@A7F G@AEA
@E*+EA
!@EF G@AE7EF G@AE7A
!
52 !!++&#! 24!!1?K,
Response to initial excitation3
21
0
– 1
– 2
– 30 5 10 15 20
t(s)
θ1(t)θ2(t)
θθ
(t).
(t)
22
)('
)(( ) "!! " ),5'=>' ,!""!'< #$%&)! "8."! '
)((,"", *
5266!#D+#! 3!!2$!62 ) $#3!#
θ
<.
. .. .
.
66
6 6
− − −
θ

MATLAB TUTORIAL 287
42 2 #($!62$# (!#!θ 2#!+##!62&)6$ 2B!# !
52##$ #3!#
+$&428&
!#$$!6!#*- +"6.
'! 66! /.&G6
,-6
.-:6
52I5J#$ 3!# 64
($,8!8"8"!
<)@E> , EA?
M)@E# " 8"CEA
6)@EQ"" D"EA
)@E " )"EA
)@E "")EA
(
'?
<D?
#*7?7M+?
(""
R*B67@8 AB6?@8 AB67@C CAB6+?
( !
@#ABR?
*>7+@A?
G.@@7AA?
G.@@7AA?
W*>@7A?>@7A+?
W*>@7A?>@7A+?
(V)
!)@E> , EA?!)@<A
!)@E" 8"CEA?!)@MA
!)@EQ"" D"EA?!)@6A
!)@E " )"EA?!)@ A
!)@E "")"EA?!)@A
!)@E# 8 EA?!)@#A
!)@EQ""8 EA?!)@RA
!)@EL ". !DEA?
!)@GA
!)@GA

288 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!"
# $%&'
&'
# '(
'(
!"
# &'
# '(
)
*'+,
'
!)
*'-.
''&
'&/'*/
012"
'(&
*'&,(
2$
3',,,*
'&&
3'**,
3',,&/
!"#$!%&'(')&'('!''*) &'(') & '('!+
($')(')''',-)(*',!-!
x1
m2k c
2mk
x2

MATLAB TUTORIAL 289
21 $ %
*
&
&
-
*
&
&
-
&
− −
*
&
&
-4
54
4
−
56&
&
2
φ3γ
γ $3*42φ $'
$77
*
.
. ..
−γ
=φ∑
22 $
*. .
.
=
φ∑ 8
2 83*
9:9; $
($'/
(''''/0
(*'/
/1&1
1&1&
(2')'))'')')')3)')')'')3)')4
1&1&
(2)')')'')3)')'')')$3)3')')3)34
5( 3
2#)4(5
" %6
#
7%
&'(2'''!''*'4
7
0( #3&'
(%'))'
/" %6
/8%%&($&(1

290 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
(9'
(
($91
&)('
.(91
&)(&):%0.3%#).0.3#).3.).3
&)(&):0.3%#).%0.3#).3#).3
&)(&)3&%.).3
%)&9))))&9))9
%0%6%"#$!
&%%24
%%&
%&)&
$'!< '=&'*>?'
3',&,3',&,'//(3'/'//(-'/
'&/3'*/'&/-'*/'/'/
'*3'*//'*-'*//3'(-'3'(3'
'&-'(,'&3'(,3'-'(*3'3'(*
2
)
'
!
3'*&-'*/
3'*&3'*/
3'*,3'**,
3'*,-'**,

MATLAB TUTORIAL 291
6) 6
) % 6 &! 7
%66) ;66
!
%'(<')'!'=
'(<')'=!>
@A
' ' $' '
' ' ' *'
$' ' ' '
' *' ' ?'
@@A
3
3
3
3
1' ' ' '
' *' ' '
' ' $*''' *'''
' ' *''' 1'''
=&'*729:9;
(2''$''')')')*'$')')')'')*')')?'4
(2A1')')')'')A*')')'')')$*''')A*'''')')A*''')1'''4
5( 3
2#)4(5
" %6
0(2))))$)$)1)14
"
#

292 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
&'(2'''!''4
0( #3&'
(%'))'
(9'
(
($91
&)('
.(91
&)(&):%0.3%#).0.3#).3.).3
&)(&):0.3%#).0.3#).3#).3
&)(&)3&%.).3
%)&9))))&9))9
% #
&%%
%%&
%&)&
2 $
= $
#!
8*
*'*/*-'(*-**'*/*'(*-*
8&
3*'*(-**'(*-*
= $
8*
,'(*,'(*
3',(&/3*-,'3&3',(&/3*3,'3&
3('&+/&3-'(++33('&+/&33'(++3
3*',*33('(&+3&3*',*3-('(&+3&
8&
'(+3*3'+3*
/'/&/*3*3/'//&,3*
&'((3&',,*3
'/,3'&+*3

MATLAB TUTORIAL 293
< '=&'*&229:9;
'
B
78
/
2
4&
&
− −
2
$%
/
2 4
&
&
&
− − − −
7"&%"#$!$) '&Aα) 6B+CBD!> '(E'!
B$'
6
(*
(*''
(?'
'(E'
%(!*

294 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
(2')'))'')')')3)')')'')3)')4
(2)')')'')3)')'')')$3)3')')3)34
F( 3
2#)4(F
C(.#33#
.(91
(-;C.).
(91
G).(#).3
(2''' '3&%364
>(G3
>( >
/H %6%%6
(91
(>3&)36
()6)')
%6%
(2$14
(G3
&($)&(1
(
/G%
(%')!*)'
(9'
&(6$))
&(61))
&( %&
&( %&
&(6%&
&(6%&
%)&)))&)9
&%%
%%
%&)&

MATLAB TUTORIAL 295
2$< '=&'*'
722229:9;$
2'2%6>CD7CD?22%$
'%)2C6D'
<)6>7&7?&%)'CD2
%)%%'<)7>777?2%)2 %$
'C D$ %) 2
2%'
+BD 6 66% ;6%
>I
C!7B6.;6'ω) &
6%D!B669 B
D
8
8(!JC%
!KB+CBD%!
B1 $%
1 θ
9 -1'θ99!ω >*?
1$ 1>*-?21$
1 9- ;'
!% $1
9θ -ω θ9
9 ;
+ω72
ω
9 ;
EF >* ?
:> ?
++
>?
!θ;θ97 $%
θ;
:
EF>* ?@* > " ? A+ − ω ωω

296 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
9:9; $2θ;$$ω
$
'(/%6
C(/%
>I(/%
($/
(2'9'!'9$4/;6
('3C3!->I3:!L3!L/%6
%)
%8;6
%%MN
&%%M-MN
< '=&'*>?'
Response to torque6
4
2
0
– 2
– 4
– 60 0.5 1 1.5 2 2.5 3
ω/ωn
θ b
! 6% %
F%6% !"#$!E!G%)(*)
(*,0-(*''',-!O %66
220 N
0.15
F(t)
T( sec)0.05 0.20
!

MATLAB TUTORIAL 297
%22%
&-ξω &- ω &
<> ?
(
< 7
&< 7
&< > 3 ?7
7
< < < <
< < >
'< '=&'*(
2%$
&>?
<> ? > ?
=
−∑
9:9; $
(*/
(*/
(*'''/
'('
+('!
(;-/,6%;6
F(-3;3
+('!''$/0%
,('/%
(3;FL/;6
/
(9,)
P(+--+: (3 '33+-+% ( '
Q$3+--+: (3 '33+-+
Q3+-+: ('
(29,4
(+3&3F33+!333+-3
/6%
'( )/H %66
('9,/%,%
(2'9,4

298 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
&)2'!'!'!?'!R4
%))!
%8+F%6%
&%%
%%&24
G < '=&'*(>?
!
" B6%6F%(S'!ω! &%%!KB+CBD%!B
6 %6!
";66%9
'
'
&
& + α
1
− −
&
& = α
'S
'
ω
α$
"7
J
E
0% 9
(> ?
> ?> ?
α − ω αω − ω ω − ω
S'
(> ?> ?
1
αω − ω ω − ω
S'
+ %6% 6 %6ω!

MATLAB TUTORIAL 299
9:9; $
('/
(''/("7-J&
'(-
(2''4/&
@(234/&
/ %6
26)K4(@)
69)(69)-&69)
69)(69)-&69)
2)74(&K
2)74(&&K
(;/,!;6
(;/,!;6
O9)(69)7
O9)(69)7
(2'9'!''9E4
+('L!-!LL!3!LL
%)+
% ;68
%%<M<==NM-<M<S==N'
&%%M
&2'?**4
9:9;< '=&'*+>?'
"

300 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
# B$ !"#$!?!T6%;6
6B+CBD!B6((!
m 2mkk 2k
2m2k
#
+;69
> ?& :@&('
&(2&&&$4+%
(
' '
' '
' '
@(
&
'
− − − −
!
9:9;2 122 $
(/
(/
(32''''''4/&
@(32'$'14/&
,($
8(%/H%;6
C(8
B( C3@3 C
2&)K4(B
( C3&
(9,)
(;K)
2)74(
+6%;6
$
(29,4
+%F

MATLAB TUTORIAL 301
.(9,)
O9).( 9)7.
O9).(O9).-O9).33O9).
.
O9).
1
'++*
*'*
*'+&*
2 H22
2
*
3'&(*
3'++
3'&(*
2
'/*(
3'
3'/
2
&
3'+
'+
3'+
$ 7 !"#$!?) 6. 6 66)
6%%!KB+CBD%%
%%!
9:9; $
(2''''''4/&
H(2'''''''''4/&
@(2'A$A'A14/
B(2FFF 3@A 3H4
D(2FF 4
+T('/870"+7"T T8H"

302 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
,(''
+('!/0BGC7,>G"87T
,T(+T-+
(FB:+3B:+L3BL-:+L$3BL$-E
( B3FB3D
&9)(F3%)
(9,)
(
9)(2''43/ %%
&9):(3&9):3 9)
(2'9,4
%)&)9)))&)9)))&$)9)!
%6"#$!U
%%&N)&N)&N$
&%%
%&N)&N)&N$
2< '=&'*,>?'
system response for unit step at first mass P10.191.2
1
0.8
0.6
0.4
0.2
0
–0.20 20 40 60 80 100 120 140 160 180 200
k
x(k
), x
(k),
x(k
)3
12
x (k)1
x (k)2
x (k)3
$
% B% !"#$!'6.
;666%626A6A14D!

MATLAB TUTORIAL 303
A B
%
+)
($ '
' *
)@(* 1
1 1
− −
H(!E '!?
'!? '!?
− −
G%B6B+CBD!
9:9; $
(2''4/&
H(2!E'!?'!?'!?4/&
@(2*1114/&
B(2FFF 3@ 3H4
D(2FF 4
+T(1/870"+7"T T8H"
,(E''
+('!/0BGC7,>G"87T
,T(+T-+
(FB:+3B:+L3BL-:+L$3BL$-E
( B3FB3D
&9)(F3%)
(9,)
P(,T:(
%('
9)(2'43/ %%
&9):(3&9):3 9)
(2'9,4
%)&)9)!
%6"#$!'
%%&N
&%%

304 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
$< '=&'>?'
%
% !"#$!)
6.%&'('!*& '('!'1-
!> ()(*,-)(*,-!
m
k
c
x
%1
&- &-&
2 &>?'*2 &>?'"':
%1 $
@I>?3&>?3 &>?A-@I>?3&>?A-I>?
>--?I>?&>?- &>?-&>?

MATLAB TUTORIAL 305
!$ 1I>?2 $$7
I>?
>? >? >?& & &
+ ++ +
'* '+,
++ +
1
I>?
'+,'*
++ +
*
B%2
%
E>?
'* '+,
++ +
9:9; $ '
< '=&'*>?'
6(2'!*'!RU'4
(2**4
6)
%V8%W
Step Response0.16
0.14
0.12
0.10
0.08
0.06
0.04
0.02
0
–0.020 0.5 1 1.5 2 2.5 3 3.5 4
Time (sec)
Am
ptitu
de
% !"#$!)
,6%%
6B+CBD!> %%
%&6;6%6!B6()('
,-)(?',-!

306 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
m
k
c
x
12 N
1%
&- &-&J
;% $17
&-* &-/&*
;%K :12 2
@&>?2 &>?A7
>--?I>?(
!$ I>?7
I>?
(
> ? + +
)22$'
9:9; 2$7< '=&'>?'
6(2''E4
(2*1'4
6)
Step Response0.2
0.18
0.160.14
0.12
0.10
0.080.06
0.04
0.020
0 0.5 1 1.5 2 2.5Time (sec)
Am
plitu
de

MATLAB TUTORIAL 307
% !"#$!$)&'&
6%6!B6(,-)(1,-)(,-)
(,-!
k1
c2
x
c1
k2
x0
I>?"I>? $%
I > ?
I > ?
*
*
*
* *
* *
* *
+ +
+ + +
! $$%2
I > ?
I > ?
>' *?>' *?
>' *?>' *?
+ ++ + +
' *
' *
+ ++ +
/
+ ++ +
9:9; 2 $
6(2114
(2?14
6)

308 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
< '=&'&>?
+6%
> ?
> ?
H
8
ω+ ξω + ω
66%68()ω(-)H
H>?
+ ξ +
G%66%6 6B+CBDξ('!)'!)'!$)'!1)'!*)'!E)'!R)'!?)'!U)!'!
9:9;
6(2''4
(2'!4
('9'!9'
6%6))
&!)'!??)5('!
%
6%%
(2'!14$(2'!E41(2'!?4
*(24E(2!4R(2!14
?(2!E4U(2!?4'(2!'4

MATLAB TUTORIAL 309
6%6))
&!$)'!R)'!$
6%6)$)
&!*)'!*?)'!*
6%6)1)
&!)'!1E)'!R
6%6)*)
&'!?)'!$?)!'
6%6)E)
&'!R)'!?)!'
6%6)R)
&'!E)'!1)!'
6%6)?)
&'!*)'!)!'
6%6)U)
&'!1)'!?)!'
6%6)')
&'!$)'!*)!'
%76%6 >(-2L:F:4
%
2
< '=&'>?
&'(( )*

310 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
% !"#$!*)6()()
(*,-)(E',-! %
9&'('!$) &'('-)'() '('-!KB+CBD
%6 & 6 6%!
m1
k1
ym
x
1%
>-+?I>?&>?-*6>? >*?
>-*?6>?>?-*I>? >?
!$
I>?
> *? >? * >?
* ,
&
+ ++ +
>&?
<2
&>?'&7 &>?"7>?*7 >?"
=1'>&?
I>?&
'( *',
* ,
++ +
'( *',
* ,
++ +
*
>?
;% =1'>?=1'>?2$ 6>?7
6>?
*
* +>?-*I>?
! >?*12% 7
6>?
*
* +
& &
* , (', &/'
* ,
+ + + ++ +
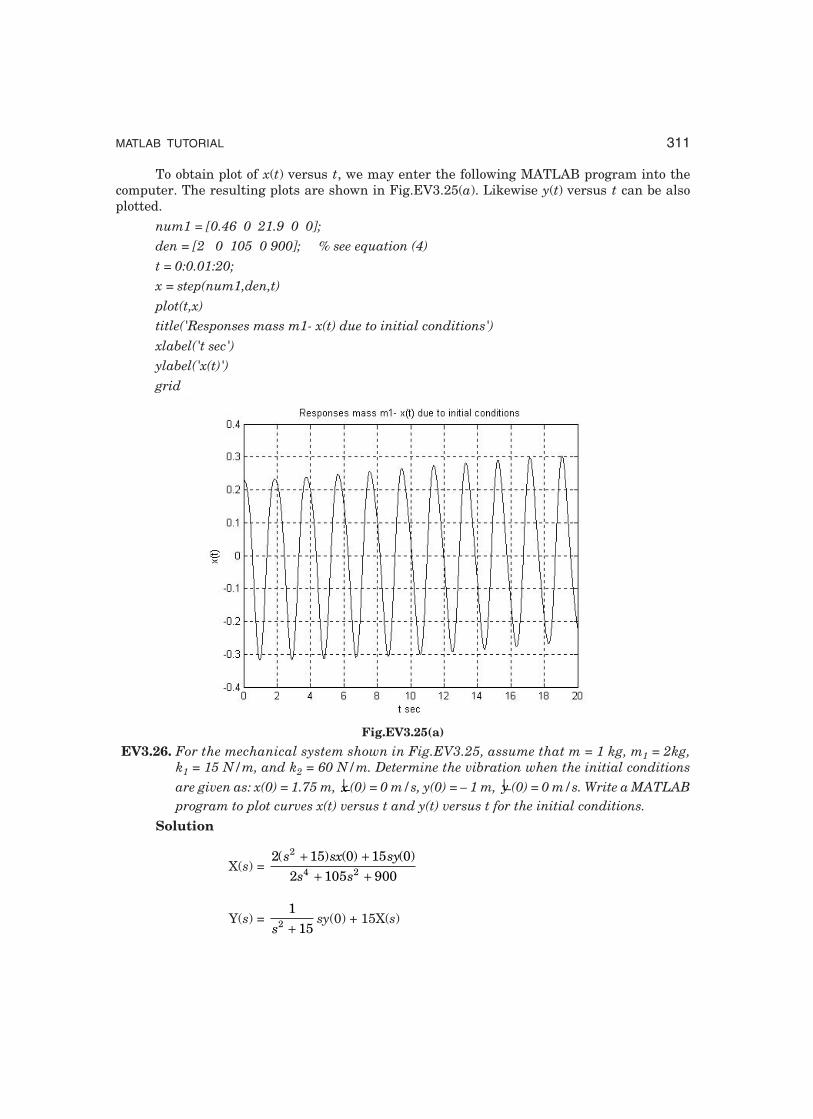
MATLAB TUTORIAL 311
&>?$ 7% 9:9;
' < '=&'>?':K>?$
2'
6(2'!1E'!U''4
(2''*'U''4/;61
('9'!'9'
&(6))
%)&
%8&6%
&%%
%%&
! % !"#$!*)6()()
(*,-)(E',-! %
9&'(!R*) &'('-)'(A) '('-!KB+CBD
%6 & 6 6%!
I>?
> *? >? * >?
* ,
&
+ ++ +
6>?
*
* +>?-*I>?

312 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
<2
&>?*'+7 &>?"7%>?3*7 >?"
)I>?26>?
I>?&
&' &+'
* ,
++ +
&' &+'
* ,
++ +
*
6>?
*
* +3-*I>?
99:9; )>?$ $'
< '=&'('
6(2$!*'$R!*''4
(2''*'U''4
6)
!+
" % !"#$!*)6()()(*,-)(E',-! %
9&'('!*) &'('-)'(A'!*) '('-!KB+CBD
%6 & 6 6%!
I>?
> *? >? * >?
* ,
&
+ ++ +
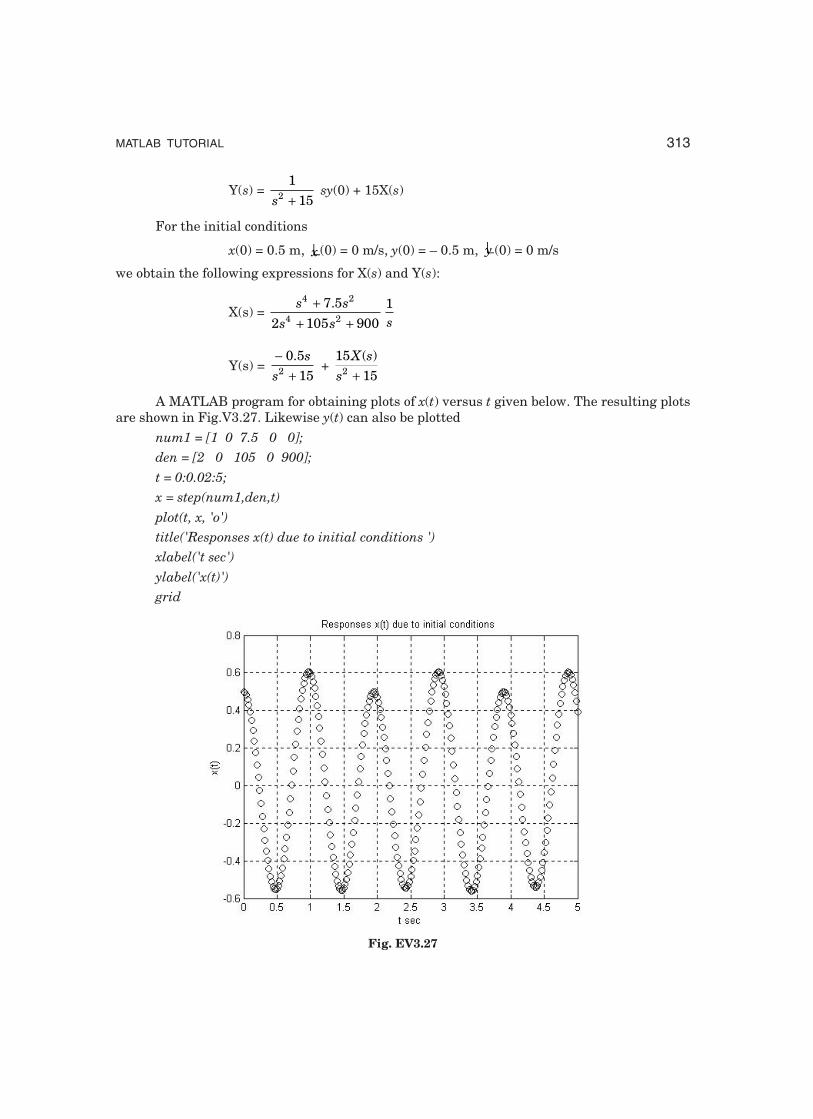
MATLAB TUTORIAL 313
6>?
*
* +>?-*I>?
<2
&>?'7 &>?"7>?3'7 >?"
)I>?26>?
I>?
+'
* ,
++ +
*
6>?
'
*
−+
-
* > ?
*
+
99:9; &>?$ $'
< '&'+':K>?2
6(2'R!*''4
(2''*'U''4
('9'!'9*
&(6))
%)&)
%8&6%
&%%
%%&
"

314 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
!
"
#$

MATLAB TUTORIAL 315
%& '
& ( )* +,-.,-/,-
+,-.+/,0*-
1,-.+/,10*02-
*,-.+/,03-
4,-.+/
2,-.3/,02-
5,-.+/,10*02-
3,-.2/,05-
6,-.+/,06-
R(s)
C(s)
+
–
+
–
G1(s) G3(s)
G8(s)
G2(s) G4(s)
G6(s)
G7(s)
G5(s)
+
+
++
+
788 $
,-.6
, +-, *- + +
9$
8
78 8 $
,-.1
6, +-
, *-
++

316 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
8
,-.+
11 ,≥:-
,-8 $
,-.1
1 1
, *-
, 2-, 4-
++ +
)
( $( )* 2
,-., *-, 4-, 2-
+ + +
7;
,-
,- 8<1:
<11
, - +2=8
,- +2=
8
,- +2=
R(s) +
–
G(s)C(s)
(( )* 5
,-
,- 8<11
<11
, - : 3:3 8
,- : 3:3
R(s) +
–
C(s)
2
(s 25)
(s 10s 100)
++ +
K
s(s 3) (s 5) (s 7)+ + +

MATLAB TUTORIAL 317
!
,-.* 1
4 * 1
,2 2+ 1: 4::-
, +1 5: *:: 12:-
+ + ++ + + +
! $,-./%,03-
,0+2-' 9
9
!( )* >
,.4:-
R(s) +
–)20s4s(s
)3s(K2 ++
+ C(s)E(s)
,- 9 8 $
8,-
,- 9 $ $
8
! ! $ 8
,-. 1
3, *-
, 4 +1-
++ +
,- 98
,-
, - 7 8
,- 9 $
,- ) 8
(( )* ++
8,-
R(s) +
–
80(s 2)s(s 1) (s 3)
++ +
C(s)

318 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
R(s) +
–
40(s 3)(s 5)
s(s 2)(s 4) (s 6)
+ ++ + +
E(s)
,- 7
,- # $
, - 7 8
!8 $
,-. 1 1
, *-
, 2 6:-, 4 1:-
++ + + +
,-
,- 8
! 8
.*:
,-., +-, 1 2 - , 1 2 -
, 1-, 2-, 3-, 1 3 -, 1 3 -
+ + + + −+ + + + + + −
! $ 8
,-.1
3, *-
, 4 +1-
++ +
,- 98
,-
, - 7 8
,- 9 $
,- ) 8
( $ 8
,-., *-, +:-
+ +
: 2 .4: 8
,- 98
$ 8

MATLAB TUTORIAL 319
(( * +5;
,-
,- ξ 8
: 2
, - 8
,- 8
?)7s5s(s
K2 ++
7
( )* +3 $ !8
,-@
)3s(s
80
+1/s
0.15
–
+
–
+R(s) C(s)
8,-,-
,-,-.1, : 2-, : 2 6-
+ + +. 4 * 16 12 4
+ + +
)
9( )* +>
8 .<+A
Gc(s) 2s
1+
–
! (( * 1:;
,- )?9 ,- 8 .<+
A+
,- .: 5)?9
, - 8
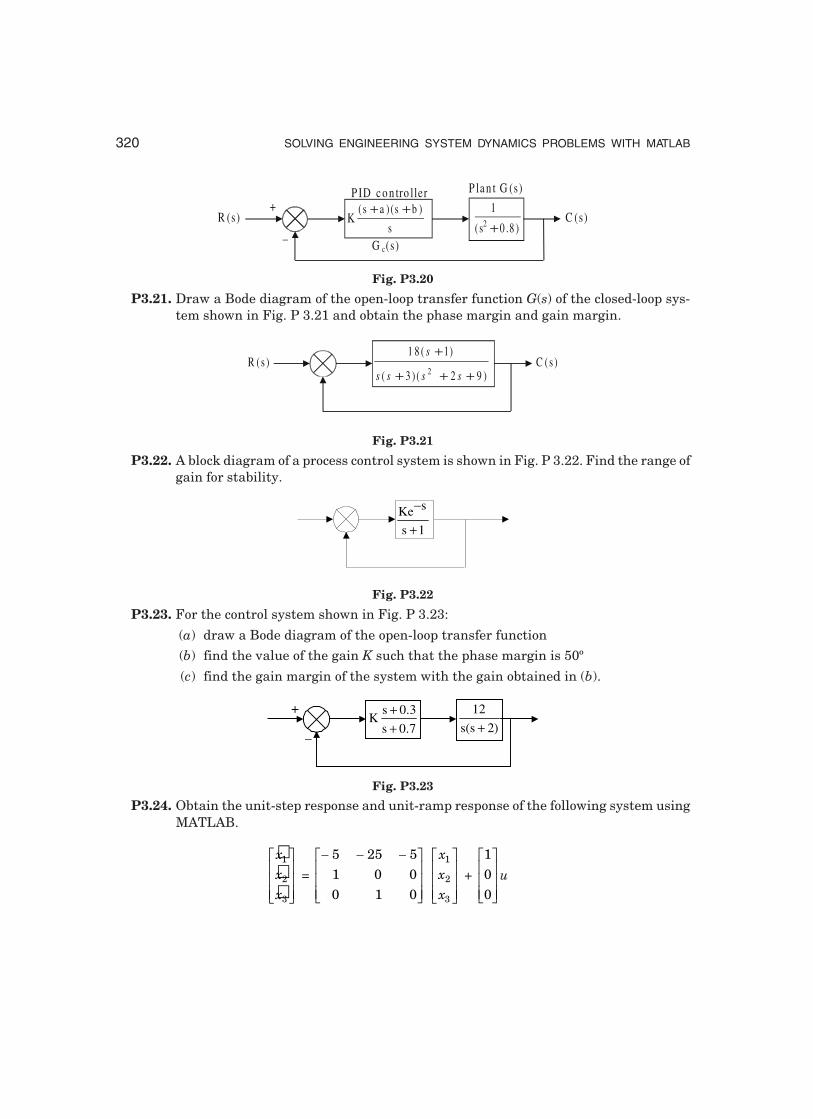
320 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
Ks
)bs) (as( ++)8.0( s
12 +
R (s) C (s)+
– G c(s)
P la n t G (s)P ID c o n tro ller
!
9 8,- 88
( )* 1+
)922) (3(
)1(1 8
+++
+
ssss
sR (s ) C (s )
$ ( )* 11 (
sKe
s 1
−
+
(( )* 1*;
,- 8
,- 2:B
, - ,-
)2s(s
12
+7.0s
3.0sK
+++
–
78 8
+
1
*
.
2 12 2
+ : :
: + :
− − −
+
1
*
0
+
:
:

MATLAB TUTORIAL 321
.%: 12 2'
+
1
*
0%:'
(( )* 12 8
: 4
.*$ .*8/
.+/
k cm
y
x
C 8
( )* 15
5s7s2ss
7s3234 ++++
+R(s) C(s)
"#
2345
234
s6s8s7s
6s5s10s3s
+++++++R(s) C(s)
"#
9
.
> 2 1
4 + :
* 2 3
− − −
0
1
2
3
,-
.%+ 3 <1'D ,:-.
:
:
:
7
.0 .0 .<

322 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
" 9;
.
: + :
: : +
+2: 2: +2
− − −
D.
:
+
+2
−
.%+ : :'D .%:'
7
+
1
.
: +
*: 3
−
+
1
0:
*:
.%+ :' +
1
!
+
1
.
+ 1
3 2 :
− −
+
1
0+ +
+ :
+
1
+
1
.+ :
: +
+
1
: :
: :
+
1
!;
,-+
,-1
78
+
1
.
: 1
* +
− −
+
1
0:
1
.%+ :' +
1
8 C
7,-
+
1
.
< + +
< + :
+
1
0:
1
.%+ :' +
1
;
,- .8
,- .<
,:-.:

MATLAB TUTORIAL 323
) ,-
.
* 1 :
: 3 +
: : 4
− − −
0
:
+
+
,-
.%: + +'D ,:-.
:
:
:
9E
.
+: 2 3
+2 4 +1
6 * 5
− − − − −
0
+
1
*
.%+ <1 *'
98
+
1
.
: 1
* *
− −
+
1
0:
1
.%+ :' +
1
C8 C
78
+
1
.
: +
+ 1
− −
+
1
0:
+
.%+ +' +
1
0%:'
+
1
*
.
+ * *
: 1 +
1 : +
− − − − −
+
1
*
0
*
:
+
.%+ 1 :'
+
1
*
9

324 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
9
.
: + :
: + 2
1 + *
− −
0
:
:
+
.%: : +'
( $ 8&8FE
.
: + :
: + 2
* 4 2
− − −
0
:
:
+
.%: + +'
! "
04 0*.:D ,:-.: 1D ,:-.: +
( 8 ,-G
$% &'&
$ ! ( )H* + C ;
? ;
,:-.: ,:-.ν:.*: /
ω.5 / ξ.: :2: +: 1: *:
m
k
c
x(t)
$(&)** ++ *
,-. −ξω ,ω<φ-
φ
.
1
1 : ::
ζω + ν+ ω
ω. 1+ − ζ ω

MATLAB TUTORIAL 325
φ.<+: :
:
ζω + ν ω
$ !
I,ω-.
1
1 1
+ 1
+ 1
ω ω− − ζ ω ω
ω ω − + ζ ω ω
φ,ω-.<+? I, -
& I, -
− ω ω
.<+1
1
+
ω ζω
ω − ω
$ " 8 ( )H* *
m
k c
x(t)
$
):≤≤+:
,:-.* ,:-.: ζ.: :2
: +: 2 ω.+2 /
( )H* *
,-." −ζω ,ω<φ-
" φ
".
1
1 : ::
ζω + ν+ ω
φ.<+: :
:
ζω + ν ω
ω. − ζ ω1+

326 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
$ !G
( )H* 4
.*$.5/ ".28/
.:,:-.: :4 ,:-.: +:/
mkc
x
$* ++ *
$ 9
( )H* 212,-
.*$ .128/
.1::/ ,:-. ,:-.:
mkc
xF
$* ++ *
$ !
(,-.<α
$ 88 ;
.+2$ .12/ .*2::/ ?G
+:::: + 8
( )H* 3
1000 N
0.1
F(t)
T( sec)
$
$ 9 ( )H* 6
:,- ,-
+.+2/1.12/ +.38/ 1.+28/

MATLAB TUTORIAL 327
k1c1
xi(t)
k2
c2 x0(t)
y(t)
$
$ 8 ( )H* >G
θ+,:-.:θ1,:-.1 +θ,:-.1IJ
? 1θ,:-.: !
?.+ IJ..+
I IGJ GJ
L L
$
$! 118 ( )H* +:G
8 + 2 + 2
7 +,- 1,- +.1.+2/
+.1.1$
m1
k1
x1(t)
m2
k2
x2(t)
F(t)
$!
;
.+
1
:
:
K.+ 1 1
1 1
+ − −
(;

328 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
(.(, -
:
8$( )H* +:,-
1 N
1
F(t)
T( sec)
$!"&#
$ 8 ,( )H* ++- E,-.L:ω
EI/2
EI/2 EI/2
EI/2H1
H2 m2
m1
y
$
9 +
+.1.4#?.1 F.+
;
4 :
: 4
+
1
0α1 1 +
+ +
− −
+
1
.α1:L
:
ω
α1. *
+1#?
F.
+1 1
×.5
M 8;
N+.
1 1 1
1 1 1 1+ 1
, -
, -, -
α − ω αω − ω ω − ω
L:
N1.1
1 1 1 1+ 1, -, -
αω − ω ω − ω
L:
ω
$ 9( )H* +1
I(,-.<α

MATLAB TUTORIAL 329
m1
k1
x1(t)
m2
k2
x2(t)
F(t)
$
$ " .* :
: 1
K.5 4
4 2
− −
8
( E
$ (( #+1 1:2$
.: ,.:- I.1:$.5::/
.5:/ ),-
m
3 kg
k c
x
$
$ (( )H* +2
.*$+.+2/.12/ .+:8/ ),-
,:-.: :2 ,:-.: 6/
m
k1 c
x
k2
$
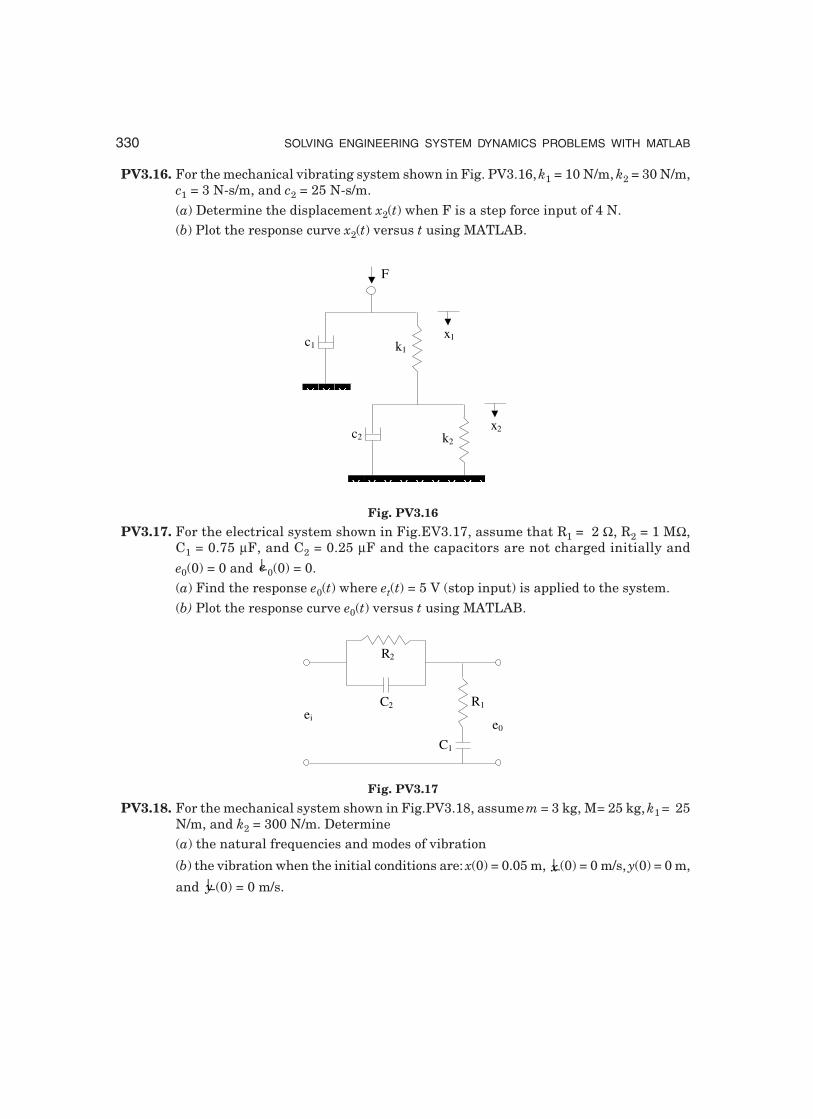
330 SOLVING ENGINEERING SYSTEM DYNAMICS PROBLEMS WITH MATLAB
$ (( )H* +5+.+:/1.*:/
+.*8/ 1.128/
,-9 1,-(4
,-)1,-
k1c1
x1
k2c2
x2
F
$
$ (( #H* +3&+.1Ω&1.+Ω
"+.: 32µ( "1.: 12µ(
:,:-.: :,:-.:
,-( :,-,-.2H,-
, ):,-
e0
R1
C1
R2
C2ei
$
$ (( )H* +6.*$.12$+.12
/ 1.*::/ 9
,-
,- ;,:-.: :2,:-.:/,:-.:
,:-.:/

MATLAB TUTORIAL 331
C,- ,-
m
k1
y
Mx
k2
$

!
" # #$%$%
&'()
" * &'++
# *,-
.$/"00"
1 , # ,2
&'33
! 1*&'((
!"# *
,-.$/&''(
"#$!%4 $ . $%
$%&')5
" " 6 .
&''(
# "# *,-.$/&'(5
$%&$%$%&'+3
$#' '&'
1*&'(0
%( 7*$%$%&'3+
' () 1 &''0
! 6$%$%&'3"
)**(( $+ !%*
)7*$%$%&''5
, '+ '# *,-
.$/"00&
(' % 7*$%$%
"00"
$#((%# *1
8$/&'+"
(! % - .$
$%$%&''"
, . !+8, #
8&'+9

BIBLIOGRAPHY 333
$+& $# *$:; "005
$+& %$# *$:;
"00)
$+&!$# *$:; "00)
/ " %7*$%$%&'5)
/#'&" %7*$%$%&'+"
! !/0( .. 1
% 9 6. &'')
! %7*$%$%&'(3
0 ' ., ! #2 %
# *,-.$/"00&
.2%'( %6$%$%"00&
$+ # *,-.$/"00"
$(( (!# &'33
2('!* - &'+5
(%.<, #&'+)
(' 2 # *,-
.$/"00"
$! 3# *1 8$/&''&
,, 7*$%$%&'+'
/ " 8.8#. ="000
/ ",8.8#. =&''3
0 #) # *,-
.$/&''+
2' &'+(
2&;#8&'+0
2(% 6$%$%&'(&
96$%$%"000
#9# *1 8$/&''+
# '! # *,-.$/
&'3+
# %9# *,-.$/&''(
"( 6$%$%&'(3
/+$:; $% $%
"009
'+ .$ )# *,
-.$/"000
02 + (%7*
$%$%&'+(
/ !!)7*$%$%&'(+

334 ANALYSIS AND DESIGN OF CONTROL SYSTEMS USING MATLAB
%'(!% &'+'
%'( ( - > 6$
%$%&''9
' 2( %'$* 7*$
%$/&''9
0 " %# *,-.$/
&'''
%'0* .%'( (! " &'()
'($0- (!%
" # *,-.$/&''+
' 2 %" 6; -
$%$%&''(
' *. 6 $%$%&'(3
'(2 7*$%$%&'5(
, $..$ "( -&
( 7*$%$%&'3+
-'+ *% &'('
-$3( 7*$%$%&'55
4*1 %?8# 8
#78&'''
&$& 7*#8# $%$%"00"
&$%5$6% #% - 6#
:; $%$%"009
".$ 1 &'39
"%!7*$%$%&'+5
&-
2+:$%$%"00"
(! 2 (
- 1,2&'(+
$%$%&'3+
%' 2#. ?8#78"00)
(6$%$%&'3)
! !1*,2&'(9
! 1*,2&'((
# *,-.$/&''(
( !'' '
!6$%&'(0
( !+%
6$%$%&'35
( +%6$%$%&'(3

BIBLIOGRAPHY 335
( +%*!(
6$%$%&'+&
&#*('
!''6$%$%&''"
#7*$%$%&'+&
#& %# *1 $/&'('
'# # &')9
' $+&!%$# *$
:; "00&
%" -. <, #<&'3&
'+ 8, #81 &'+'
'+ 02.! 8
, #81 &'35
'+ (' !8, #
81 &'53
'+! (' 8,
#$%$%&'30
/ #/ '.12
=&'(+
%'(! >- 8
: &'(0
$ 8;-, ;&'3'
$ ':# $%$%&'5(
'/;.# &'+"
- 4$%$%&''9
' * 6. &'33
'$%'" 6$%$%&'39
8&'50
, *>.$%$%&'3&
2"+
#$%$%&'39
+;#8&'39
/"*(8.8#. ="000
2 '$ 2 #
:$ &'('
#()7*$%$%&'53
# # *1
$/&''"
# " # *1 $/
&''3
$+& ('! +$
% :$%$%&'((

336 ANALYSIS AND DESIGN OF CONTROL SYSTEMS USING MATLAB
$+&%$# *$:; "000
! 6$%$%&''5
#& $+&%+$ #
$%$%&'()
- 4$%$%&''"
.#( 6$%$%"00&
(!) 6$%$%&'+5
(!+(1&'("
$#'"%'( "06$
%$%&'(9
7 .&'55
/$8 .&'+"
. 2!8<*&'3(
2 ' !6$%$%&'5"
2 ,)7*$%
$%&''
.'!6$%$%&'+9
'#&( 7*$%$%&'3)
$" $. 2!% # *$/&'3)
$ (+'% 8.8#.
="00"
($ # *1
$/&'('
(% ((7# * @&'+'
(%. 7*$%&'5(
(2'2",( "'"
* .&'('
( &. 2 &'3&
++2# .# %96
; $%$%"000
7*$%$%&''9
(-A< -7
*$%$%&''3
.(6$%$%&'9"
2' #+ (
6$%$%&'(9
% # &'33
0 $&(%+ $# &'3'
2 6$%$%&')"
2#$ ",-! $&'+'
2%%' ":# &'5&

BIBLIOGRAPHY 337
2/%'! $%$%&'3+
2/%'!" 7*$%$%&'(3
2/%'%6$%$%&'(5
2/%'!%7*$%$%&'+0
2/%'('/# *,-.
$/&''+
2 2#&4 $ # $/&'3"
22(8.8#. ="00"
2. #&'9+
20- 6$%$%&'39
22 7*$%$%&')(
2$ %'' " $&'(5
2!7*$%$%&'53
/ -'$!
$#8$:; &'('
',( (%'6$%
$%&'(5
,' 2-#&6$%$%&'+'
0 ! + '! "
&'()
0 !' &'('
0 + '!" &'()
#+;#&'(9
2#! 8
, #8&'('
((06$%$%&'(9
++(8, #8&'+(
* *(+ 1*&'(3
(2 %!*!.
&'39
$&(0)8.8#.
="000
(!6$%$%&''&
( $+&" 61
$:; &''"
( $+ (
61 $:; &'()
9 6. &''5
%&1%, $%$%&'30
""(-7*
$%$%&'3)

338 ANALYSIS AND DESIGN OF CONTROL SYSTEMS USING MATLAB
'. *!- 4$%$%&''&
'. *% - $%
$%&''&
'(!&'('
0 ( %' 6$%
$%&'3(
/ !7*$:; &'("
!!96$%$%&'(&
((#; $%$%&'50
-'+ (2- 0#%6$%
$%&'(3
-' "- ''2$!''5#
*1 8$/&'''
-' !'')6$%$%
&')0
-' $ # "/"(5
6$%$%&''0
-' $ #!%7*$%$%
&')(
-' :4 $ $%$%&'55
- #6$%$%&'30
-!2 -
&'39
-$+ "6$%$%&'9)
& " $%$%&''(
& (6$%$%&'3+
&%!" *>.$%$%&'+'
& 5%' # %&'35
"%"- $%$%&'+0
"'0$!''1*&'()
"/"-' $ #(5
6$%$%&''0
" "( (4&6$%
$%&')'
" "( (4"6$%
$%&')'
"0&*!7*$%$%
&''&
42 2 -
-(!''#6$%$%&''9

BIBLIOGRAPHY 339
- 4 :4&5
&'(99 +
!#!" 6$%$%&''9
& (#$(! !
6. &'()
$.2 2%$ ## *,
-.$/$/&''3
'( " #!#
*1 8$/&'+3
%'-1; - - /:
B1C! %- # 1 &'(0
'+ &""
%'- 2$ - 1 ;#
; 2#4&"&'+5
&5+5 &5(3
%'-%'.!< , - ;
$ -: 2!''4)"&'+5(35
(3'
%'- 2$ 1 ; - -
#8 ! # )
-1:4&)&'+5
' $+&!%$# *$
:; "00&
%$' "(!''#$%$%
&'3'
'+ # $ $ (
!'')7*$%$%"00"
$#'" * (% 7*$%$%
&'+5
"#!*!!!''
" 7*$%$%&'+"
0 #( (' <
-1 #/
%4&&&'(93+' 3((
$+& 2 ''!!%
$# *$:; "000
$+& ('! +$
% :$%$%&'((
$+&%$# *$:; "000
++ (!!#!6$%$%
"00&
!0(8#= - - <
: 1D 2#43
&'+9309 303

340 ANALYSIS AND DESIGN OF CONTROL SYSTEMS USING MATLAB
!$&!''#!!!)# *,-
.$/$/&'''
!$&#!,!%# *,-.
$/$/"00"
!*#(#!''" 6$%
$%&''(
!. #! 6. &'3'
#& $+&%+$ #
$%$%&'()
! "'!''#!9 6
. &'()
$$ - 1 $ ;
1 '!''4"
&'+93' '+
,!!)3# *,-
.$/$/"00&
. !#!7 *$%$%&'53
66(2 "/"=$ -:
2 %-81=&'+("39 "+'
$.(. - : . 1
2! 4&+&'505)0 5505')
$#-($ -$A $ -
: 2 # 4&&&'+3
9(9 9(3
$" $. 2!% # *1
8$/&'+0
( # - ;
, 4 # 2 #
49&'+&&9 ")
" . ; E . ; 1
< /: B1C! %- #
1 &'(0
#, - $; 2
!''4)0&'+9)&+ )"&
.(#&%/
(6$%$%&''&
$2 = : < :
2#4&+&'(&339 3+(
%'("$-2% "-= : -
1D !!!249&'35"&+" "&+9
/ " 1 ; = - ;
: . 8 ( "4 4#
!''&'5&& (

BIBLIOGRAPHY 341
/ " (' %$
!''/7*$%$%&'+3
, (#!!)" # *
,-.$/$/"000
2#. !1!!)# *,-.$
/$/"00&
2'0( ! #!!)9# *
,-.$/$/&'''
2% (! - - # $ -:
2(-1&'+)'3 &0"
#! 1'5$!!) "
# *,-.$/$/"00"
$' 6$%$%
&'++
028 -: ! 2
%4(5&'5'3+ ')
-:; $ -
: 1D 2!''-1/ &'+5)3) )+0
$ 8: 1D
2#4)&'+"5(+ 5'3
!''# # *,
-.$/$/"00"
2 ## & 8 1
: = : = 2 #
4"0&'()&"& &90
% 0"#!!)'
!''# *,-.$/$/"00&
2(. 2- < : 1D
%'. *-6BC6
$%$%&'35
- (% ( " $-
$ # - ! 0!:
;$&& &5&'+9
-' $ # "/"((
)6$%&'+)
"'- % !%4 $
. $%$%&'+0
" ##. 6$%$%
&'33
" !' '($ : 8
-2/ %
4&&'+9")& "5"
342 ANALYSIS AND DESIGN OF CONTROL SYSTEMS USING MATLAB
2-
'+ (!!)(" ?8
#78"00"
. ( - "#67# *,-
.$/"00&
6,- ! ($ !!)?8
#78"000
$+&!% !!)$;
B#C$:; "003
$+& !(!!)$;
B#C$:; "00+
$+& ( $ !!) $
; B#C$:; "00+
$+&!!)$; B#C$:
; "00+
2( $!!)# *1 8
$/&''9
(! !!) "#6?8
#78"00&
+ %(!!)56$%"00"
+ (!!)56$%"00"
2 (!!)?8#78"00&
- $!!)!''<#
= 8"00&
/ ""!!)!5%
6.88&''5
'/ '"!!)6$
%"009
2 !!) %& ('$8 9:;--
%8-6; "00"
#% $!!)# *,-
.$/&'')
# ($!!)# *,-
.$/&'')
+$1 $!!) !<
<, #$%$%"00"
'! !!)7*$
%$%&''9
# /-!!)(38 >*?8.8#
. ="00"
-'2'"; "#686; $&'''
-'2'"; !!)*!''(+3
6; $"000

BIBLIOGRAPHY 343
-'2'" ; !!)* ."-17
6; $&''" &''(
-'2'" ; !!)*1'" 9
6; $"000
-'2'"; !!)*+6; $"000
-'2'"; !!)*+#+9;6; $
"000
-'2'" ; !!)* ."-1;
6; $&''9 &''+
-'2'" ; !!)*"!!)1'36
; $"000
-'2'"; !!)*"!!)36; $
"000
(4
;/
.
-81/
-1/
-1/ 4
/ -- -
8 $ 1
1D1 -:
; / $ 1
; / 1
; / 4:
/ - - #$%$%,-
/ - 4 #$%$%,-
/ -
/ 4 - 1 $%
$%,-
/-1; / -;;; 4 8 1
$ 4 6
- 4 ;<-$
4-:
4 - - #
- 4 :-- # <8,-
- 4 # 4<,-