semi-analytical treatment of complex nonlinear
TRANSCRIPT
Available online at www.worldscientificnews.com
( Received 20 January 2020; Accepted 09 February 2020; Date of Publication 10 February 2020 )
WSN 142 (2020) 1-24 EISSN 2392-2192
Semi-analytical treatment of complex nonlinear oscillations arising in the slider-crank mechanism
Akuro Big-Alabo*, Collins Onyinyechukwu Ogbodo and Chinwuba Victor Ossia
Applied Mechanics & Design (AMD) Research Group, Department of Mechanical Engineering, Faculty of Engineering, University of Port Harcourt, Port Harcourt, Nigeria
*E-mail address: [email protected]
ABSTRACT
The model for the free nonlinear oscillation of the slider-crank mechanism is very complicated
and difficult to solve accurately using most of the existing approximate analytical schemes. However,
the continuous piecewise linearization method (CPLM), which is a recently proposed semi-analytical
algorithm, is capable of producing simple and accurate periodic solutions for conservative systems
irrespective of the complexity of the nonlinear restoring force. Hence, this study applied the CPLM to
solve and analyze the complex nonlinear oscillations arising in the slider-crank mechanism. The CPLM
results were verified using numerical solutions and it was found that the CPLM solution was accurate
to less than 1.0% for angular amplitudes up to 165°. Analysis of the frequency-amplitude response
revealed the existence of asymptotic behaviour as the ratio of the crank radius to the connecting rod
length approaches zero or unity. Hence, oscillation models for the observed asymptotic responses were
derived and found to be significantly simpler compared to the original oscillation model. Finally,
analysis of the large-amplitude oscillations of the slider-crank mechanism revealed the presence of
strong anharmonic response.
Keywords: Slider-crank mechanism, nonlinear oscillation, conservative system, non-natural system,
continuous piecewise linearization method, periodic solution

World Scientific News 142 (2020) 1-24
-2-
1. INTRODUCTION
Nonlinear oscillation of structures and systems is of interest to engineers, natural
scientists, and mathematicians. Knowledge of the periodic response of a nonlinear oscillator is
important for understanding the system’s behaviour and is necessary for design purposes. The
dynamic models of most oscillators are in the form of nonlinear ordinary differential equations,
the exact solutions of which are not available in many cases. Therefore, numerical or
approximate analytical solutions are usually applied to derive the periodic response of most
nonlinear oscillators.
In recent times, approximate analytical solutions have become attractive and many such
methods have been developed to determine the periodic response of various nonlinear systems
such as Duffing oscillator [1], simple pendulum [2], pendulum with rotating support [3], mass
attached to the mid-point of an inextensible string [4, 5], geometrically nonlinear crank [6],
two-mass system [7-9], vibration of cracked plate [10, 11], beams [12], relativistic simple
harmonic oscillator [13, 14], micro- and nano-electromechanical devices [15, 16], oscillator
with coordinate-dependent mass [17] and fractal systems [18]. Most of the existing approximate
analytical methods for solving nonlinear oscillators [4, 5, 19-30] are either algebraically
intractable or inaccurate when applied to solve oscillators with complex nonlinearity. The
continuous piecewise linearization method (CPLM) is a simple and accurate algorithm that was
formulated to solve models of nonlinear conservative oscillators notwithstanding the
complexity of the nonlinear restoring force [1, 31].
The slider-crank mechanism is a classic mechanical system whose dynamic response has
been investigated by many [32-40]. The slider-crank mechanism with a rigid connecting rod
exhibits complex nonlinear vibrations and the oscillation model has been discussed in the
literature [35, 41]. However, due to the complex nature of the oscillation model, only numerical
solutions to the oscillation model have been presented [35].
To explore the potential of the CPLM to accurately predict complex nonlinear oscillations
of physical systems, we apply the CPLM to investigate the periodic response of the slider-crank
oscillations. In order to achieve this, the conventional form of the slider-crank oscillation model
was first transformed into a conservative form that shows the nonlinear restoring force
explicitly.
The CPLM algorithm was then applied to the conservative form of the model to derive
frequency-amplitude responses and oscillation histories that were used to analyse the small-
amplitude and large-amplitude oscillations. The CPLM results were verified by comparing with
accurate numerical results.
2. MATHEMATICAL MODEL
2. 1. Description of slider-crank mechanism
The slider-crank mechanism is a well-known mechanical system that can be used to
convert rotary motion to translational motion and vice versa. The slider-crank mechanism is a
special case of the four-bar linkage mechanism [32].
It has a crank, which rotates about its supported end, and a connecting rod, which connects
the crank to the slider mass. An illustration of the slider-crank mechanism is shown in Figure
1.
World Scientific News 142 (2020) 1-24
-3-
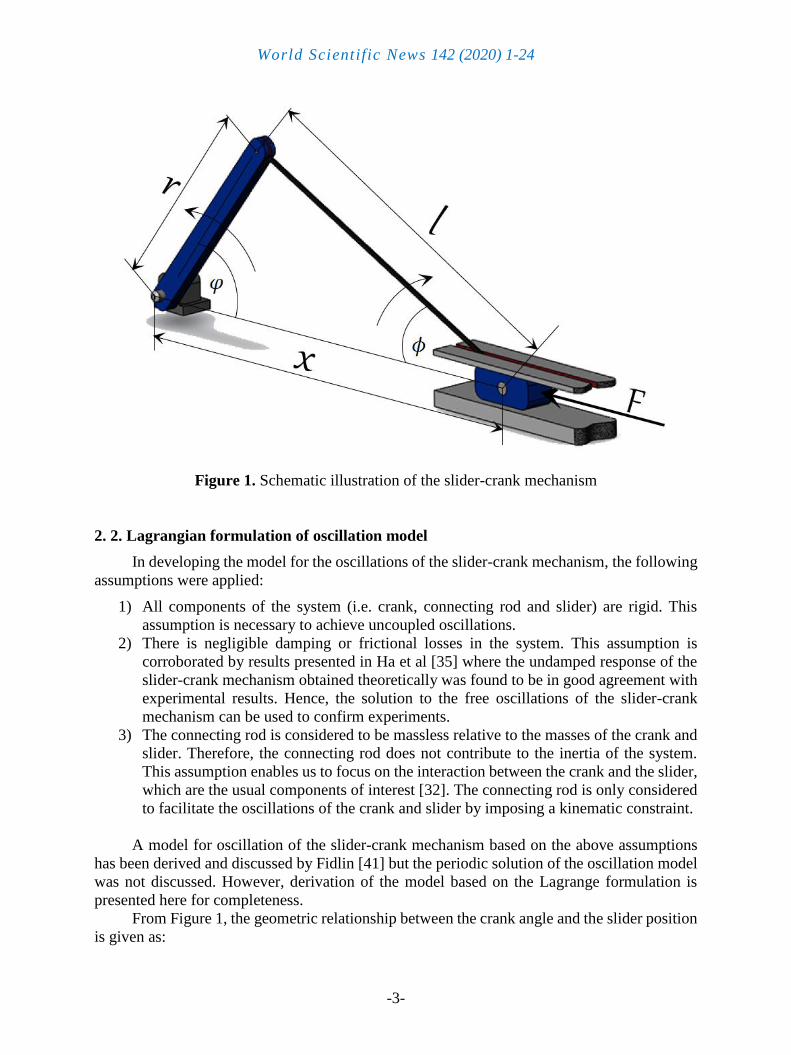
Figure 1. Schematic illustration of the slider-crank mechanism
2. 2. Lagrangian formulation of oscillation model
In developing the model for the oscillations of the slider-crank mechanism, the following
assumptions were applied:
1) All components of the system (i.e. crank, connecting rod and slider) are rigid. This
assumption is necessary to achieve uncoupled oscillations.
2) There is negligible damping or frictional losses in the system. This assumption is
corroborated by results presented in Ha et al [35] where the undamped response of the
slider-crank mechanism obtained theoretically was found to be in good agreement with
experimental results. Hence, the solution to the free oscillations of the slider-crank
mechanism can be used to confirm experiments.
3) The connecting rod is considered to be massless relative to the masses of the crank and
slider. Therefore, the connecting rod does not contribute to the inertia of the system.
This assumption enables us to focus on the interaction between the crank and the slider,
which are the usual components of interest [32]. The connecting rod is only considered
to facilitate the oscillations of the crank and slider by imposing a kinematic constraint.
A model for oscillation of the slider-crank mechanism based on the above assumptions
has been derived and discussed by Fidlin [41] but the periodic solution of the oscillation model
was not discussed. However, derivation of the model based on the Lagrange formulation is
presented here for completeness.
From Figure 1, the geometric relationship between the crank angle and the slider position
is given as:

World Scientific News 142 (2020) 1-24
-4-
𝑥 = 𝑟 cos𝜑 + 𝑙√1 − Ω2 sin2 𝜑 (1𝑎)
where 𝑥 is the slider position measured from the centre of rotation of the crank and Ω = 𝑟/𝑙 is
a dimensionless geometric constant.
The velocity of the slider can be derived by differentiating equation (1a) as shown:
= 𝑑𝑥
𝑑𝜑= −𝑟
(
sin𝜑 +Ω sin 2𝜑
2√1 − Ω2 sin2 𝜑)
(1b)
Since the connecting rod is assumed to be massless, the kinetic energy is given as:
𝑇 =1
2𝑀𝑐𝑟
22 +1
2𝑀𝑠
2 (2a)
Therefore,
𝑇 =1
2𝑀𝑐𝑟
22 +1
2𝑀𝑠𝑟
2
(
sin𝜑 +Ω sin 2𝜑
2√1 − Ω2 sin2𝜑)
2
2 =1
2𝐽(𝜑)2 (2b)
where 𝐽(𝜑) is the effective moment of inertia given as:
𝐽(𝜑) = 𝑀𝑐𝑟2 +𝑀𝑠𝑟
2
(
sin𝜑 +Ω sin 2𝜑
2√1 − Ω2 sin2𝜑)
2
(3)
We note that the velocity squared in equation (2b) is multiplied by a displacement-
dependent inertia, 𝐽(𝜑), which means that the kinetic energy is not a pure quadratic function of
velocity. This quality is characteristic of non-natural oscillators [31, 42].
The potential energy of the connecting rod is negligible since it is massless. Also, the
crank and the slider have no potential energies. Hence, the total potential energy of the system
is 𝑉 = 0.
Therefore, the Lagrangian is:
𝐿 = 𝑇 − 𝑉 =1
2𝐽(𝜑)2 (4)
Now, the oscillation model can be derived from the Lagrange equation given as:
𝑑
𝑑𝑡(𝜕𝐿
𝜕) −
𝜕𝐿
𝜕𝜑= 𝑄 (5)

World Scientific News 142 (2020) 1-24
-5-
Substituting equation (4) in (5) we get:
𝐽(𝜑) +1
2𝐽′(𝜑)2 − 𝑄(𝜑) = 0 (6)
The initial conditions to equation (6) are 𝜑(0) = 𝜑0 and (0) = 0, and the prime denotes
differentiation with respect to 𝜑. Also, 𝑄(𝜑) is the generalized force given as:
𝑄(𝜑) = 𝐹𝜕𝑥
𝜕𝜑= −𝐹𝑟
(
sin𝜑 +Ω sin 2𝜑
2√1 − Ω2 sin2 𝜑)
(7)
where 𝐹 > 0. Differentiating equation (3), we get:
𝐽′(𝜑) = 𝑀𝑠𝑟2 (sin 2𝜑 + (
Ω
𝑐) (cos𝜑 sin 2𝜑 + 2 cos 2𝜑 sin𝜑) +
1
2(Ω
𝑐)2
sin 4𝜑
+1
2(Ω
𝑐)3
sin2 2𝜑 sin𝜑 +1
4(Ω
𝑐)4
sin3 2𝜑) (8)
where 𝑐 = √1 − Ω2 sin2 𝜑. At this point, if we substitute equations (3), (7) and (8) in equation
(6), we arrive at the nonlinear model governing the periodic response of the crank as shown in
equation (9).
[𝑀𝑐𝑟2 +𝑀𝑠𝑟
2 (sin 𝜑 +1
2(Ω
𝑐) sin 2𝜑)
2
] +1
2𝑀𝑠𝑟
2
[sin 2𝜑 + (Ω
𝑐) (cos𝜑 sin 2𝜑 + 2 cos 2𝜑 sin𝜑) +
1
2(Ω
𝑐)2
sin 4𝜑 +1
2(Ω
𝑐)3
sin2 2𝜑 sin 𝜑
+1
4(Ω
𝑐)4
sin3 2𝜑] 2 + 𝐹𝑟 (sin𝜑 +1
2(Ω
𝑐) sin 2𝜑) = 0 (9)
Equation (9) is a very complicated nonlinear oscillator and the main challenge lies in
deriving an accurate periodic solution for this oscillator using approximate analytical schemes.
This paper addresses this challenge by applying the CPLM algorithm to derive accurate periodic
solutions. This way, the potential of the CPLM algorithm to handle complex nonlinear
oscillators is being explored and confirmed.
2. 3. Conservative form of oscillation model
Equation (6) governs the motion of a conservative system but it is not in the standard
conservative form that contains an explicit expression for the restoring force. However, the
conservative form can be derived as follows.
Assuming = 𝑦, then equation (6) can be written as:

World Scientific News 142 (2020) 1-24
-6-
𝐽(𝜑)𝑦𝑑𝑦 + (1
2𝐽′(𝜑)𝑦2 − 𝑄(𝜑))𝑑𝜑 = 0 (10)
Equation (10) is an exact differential equation and its solution is:
𝐸(𝜑, ) =1
2𝐽(𝜑)2 + ℎ(𝜑) = ℎ(𝜑0) (11)
where ℎ(𝜑) = −∫𝑄(𝜑)𝑑𝜑 = −𝐹𝑟(cos𝜑 + Ω√1 − Ω2 sin2𝜑 ) and ℎ(𝜑0) is a constant
representing the total energy in the slider-crank mechanism. Equation (11) is a mathematical
statement of the conservation of energy for equation (6) and it confirms that the Hamiltonian
function, 𝐻 = 𝑇 + 𝑉 =1
2𝐽(𝜑)2, is not constant. Hence, the slider-crank mechanism may be
referred to as a non-Hamiltonian conservative system because it does not admit a constant
Hamiltonian function [31].
From equation (11) the state-space relationship is:
2 =2[ℎ(𝜑0) − ℎ(𝜑)]
𝐽(𝜑) (12)
Substituting equation (12) in (6) and simplifying gives:
+𝐽′(𝜑)[ℎ(𝜑0) − ℎ(𝜑)]
[𝐽(𝜑)]2−𝑄(𝜑)
𝐽(𝜑)= 0 (13)
Equation (13) represents the conservative form of equation (6) and can be expressed as:
+ 𝑔(𝜑) = 0 (14)
where 𝑔(𝜑) is the restoring force given as:
𝑔(𝜑) =𝐽′(𝜑)[ℎ(𝜑0) − ℎ(𝜑)]
[𝐽(𝜑)]2−𝑄(𝜑)
𝐽(𝜑)
Carrying out the necessary substitutions and after algebraic simplification, the restoring
force for the oscillation of the crank can be expressed as:

World Scientific News 142 (2020) 1-24
-7-
𝑔(𝜑) =𝐹𝑀𝑠𝑟
3[cos𝜑 − cos𝜑0 + Ω(𝑐 − √1 − Ω2 sin2𝜑0 )]
[𝑀𝑐𝑟2 +𝑀𝑠𝑟2 (sin𝜑 +12 (Ω𝑐) sin 2𝜑)
2
]
2 (sin 2𝜑
+ (Ω
𝑐) (cos𝜑 sin 2𝜑 + 2 cos 2𝜑 sin𝜑) +
1
2(Ω
𝑐)2
sin 4𝜑
+1
2(Ω
𝑐)3
sin2 2𝜑 sin𝜑 +1
4(Ω
𝑐)4
sin3 2𝜑)
+𝐹𝑟 (sin 𝜑 +
12 (Ω𝑐) sin 2𝜑)
𝑀𝑐𝑟2 +𝑀𝑠𝑟2 (sin𝜑 +12 (Ω𝑐) sin 2𝜑)
2 (15)
A typical plot of equation (15) when 𝜑0 = 𝜋 is shown in Figure 2, and the plot reveals
the highly nonlinear nature of the crank oscillation for large initial amplitudes. Figure 3 shows
a plot of the phase diagram for the crank oscillation and it reveals the existence of periodic
oscillations around the origin, for all feasible amplitudes i.e. 0 < 𝜑0 < 𝜋.
The corresponding phase diagram for the slider oscillation is shown in Figure 4.
The latter reveals that the centre of periodic oscillation for the slider depends on the initial
amplitude of the crank.
Figure 2. Restoring force for the crank oscillation when 𝜑0 = 𝜋 rad.
-30
-20
-10
0
10
20
30
-4 -3 -2 -1 0 1 2 3 4
Re
sto
rin
g f
orc
e (
N/k
gm
2)
Crank displacement (rad)

World Scientific News 142 (2020) 1-24
-8-
Figure 3. Phase diagram for the crank oscillation when 𝜑0 = 𝜋/6, 𝜋/3, 𝜋/2, 2𝜋/3, 5𝜋/6, and
𝜋 rad. The oscillation amplitude was increased each time by 𝜋/6 from the innermost to the
outermost plot.
Figure 4. Phase diagram for the slider oscillation when 𝜑0 = 𝜋/6, 𝜋/3, 𝜋/2, 2𝜋/3, 5𝜋/6, and
𝜋 rad. The oscillation amplitude was increased each time by 𝜋/6 from the innermost to the
outermost plot.
-10
-8
-6
-4
-2
0
2
4
6
8
10
-4 -3 -2 -1 0 1 2 3 4
Cra
nk
ve
loci
ty (
rad
/s)
Crank displacement (rad)
ϕ0 = π
ϕ0 = π/6
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
0.35 0.4 0.45 0.5 0.55 0.6 0.65
Slid
er
velo
city
(m
/s)
Slider displacement (m)
ϕ0 = π/6
ϕ0 = π

World Scientific News 142 (2020) 1-24
-9-
3. APPROXIMATE PERIODIC SOLUTION
The conservative form of the nonlinear oscillation model for the crank (i.e. equations (14)
and (15)) was solved using the CPLM algorithm. The algorithm is based on the piecewise
discretization and linearization of the nonlinear restoring force. In order to be concise, details
on the concept and formulation of the CPLM algorithm are not discussed here and the interested
reader can refer to the following articles [1, 31]. Here, the main results of the CPLM solution
for nonlinear conservative models are presented.
According to the CPLM algorithm [1], the linearized stiffness for each discretization of
the nonlinear restoring force 𝑔(𝜑) can be written as 𝐾𝑝𝑞 = [𝑔(𝜑𝑞) − 𝑔(𝜑𝑝)]/(𝜑𝑞 − 𝜑𝑝). Consequently, the CPLM solution for the displacement and time interval covered by each
discretization depends on whether 𝐾𝑝𝑞 is positive or negative [31].
3. 1. Solution for positive linearized stiffness
If 𝐾𝑝𝑠 > 0, then the displacement for each discretization can be expressed as:
𝜑(𝑡) = 𝑅𝑝𝑞 sin(𝜔𝑝𝑞𝑡 + Φ𝑝𝑞) + 𝐶𝑝𝑞 (16)
where 𝑅𝑝𝑞 = [(𝜑𝑝 − 𝐶𝑝𝑞)2+ (𝑝/𝜔𝑝𝑞)
2]1/2
, 𝜔𝑝𝑞 = √𝐾𝑝𝑞 and 𝐶𝑝𝑞 = 𝜑𝑝 − 𝑔(𝜑𝑝)/𝐾𝑝𝑞. The
initial conditions (𝜑𝑝, 𝑝) and other parameters (Φ𝑝𝑞, ∆𝑡) are determined based on the
oscillation stage. For the oscillation stage that moves from +𝜑0 to −𝜑0 the initial conditions
for each discretization are 𝜑𝑝 = 𝜑𝑝(0) = 𝜑0 − 𝑝∆𝜑 and 𝑝 = 𝑝(0) =
−√|2∫ −𝑔(𝜑)𝑑𝜑𝜑𝑝
𝜑0|; where ∆𝜑 = 𝜑0/𝑛 and the other parameters are calculated as:
Φ𝑝𝑠 = 0.5𝜋 𝑝 = 0
𝜋 + tan−1[𝜔𝑝𝑞(𝜑𝑝 − 𝐶𝑝𝑞)/𝑝] 𝑝 < 0 (17a)
∆𝑡 = (0.5𝜋 − Φ𝑝𝑞)/𝜔𝑝𝑞 (𝜑𝑞 − 𝐶𝑝𝑞) ≥ 𝑅𝑝𝑞
(0.5𝜋 + cos−1[(𝜑𝑞 − 𝐶𝑝𝑞)/𝑅𝑝𝑞] − Φ𝑝𝑞)/𝜔𝑝𝑞 (𝜑𝑞 − 𝐶𝑝𝑞) < 𝑅𝑝𝑞 (17b)
For the oscillation stage that moves from −𝜑0 to +𝜑0 the initial conditions are
𝜑𝑝 = 𝜑𝑝(0) = −𝜑0 + 𝑝∆𝜑 and 𝑝 = 𝑝(0) = √|2 ∫ −𝑔(𝜑)𝑑𝜑𝜑𝑝
𝜑0| ; the other parameters are
calculated as:
Φ𝑝𝑠 = −0.5𝜋 𝑝 = 0
tan−1[𝜔𝑝𝑠(𝜑𝑝 − 𝐶𝑝𝑠)/𝑝] 𝑝 < 0 (18a)
∆𝑡 = (0.5𝜋 − Φ𝑝𝑞)/𝜔𝑝𝑞 (𝜑𝑞 − 𝐶𝑝𝑞) ≥ 𝑅𝑝𝑞
(0.5𝜋 + cos−1[(𝜑𝑞 − 𝐶𝑝𝑞)/𝑅𝑝𝑞] − Φ𝑝𝑞)/𝜔𝑝𝑞 (𝜑𝑞 − 𝐶𝑝𝑞) < 𝑅𝑝𝑞 (18b)
World Scientific News 142 (2020) 1-24
-10-
At the end of each discretization, 𝑡𝑞 = 𝑡𝑝 + ∆𝑡 and the end variables (𝜑𝑞 and 𝑞) are
determined by replacing 𝑝 with 𝑞 in the formulae for the initial conditions.
3. 2. Solution for negative linearized stiffness
If 𝐾𝑝𝑞 < 0, then the solution of the displacement for each discretization is:
𝜑(𝑡) = 𝐴𝑟𝑠𝑒𝜔𝑝𝑞𝑡 + 𝐵𝑟𝑠𝑒
−𝜔𝑝𝑞𝑡 + 𝐶𝑝𝑞 (19)
where 𝜔𝑝𝑞 = √|𝐾𝑝𝑞|, 𝐶𝑝𝑞 = 𝜑𝑝 + 𝑔(𝜑𝑝)/|𝐾𝑝𝑞| and 𝐴𝑝𝑞 and 𝐵𝑝𝑞 are integration constants that
depend on the initial conditions. Therefore, 𝐴𝑝𝑞 =1
2(𝜑𝑝 − 𝐶𝑝𝑞 + 𝑝/𝜔𝑝𝑞) and
𝐵𝑝𝑞 =1
2(𝜑𝑟 − 𝐶𝑝𝑞 − 𝑝/𝜔𝑝𝑞). The initial and end conditions are computed in the same way
as in the case of 𝐾𝑝𝑞 > 0. Applying the end conditions in equation (5) gives the time interval
for each discretization as:
∆𝑡 =
1
𝜔𝑝𝑞log𝑒
[ (𝜑𝑞 − 𝐶𝑝𝑞) ± √(𝜑𝑞 − 𝐶𝑝𝑞)
2− 4𝐴𝑝𝑞𝐵𝑝𝑞
2𝐴𝑝𝑞
]
(𝜑𝑞 − 𝐶𝑝𝑞) > 2√𝐴𝑝𝑞𝐵𝑝𝑞
1
𝜔𝑝𝑞log𝑒 (
𝜑𝑞 − 𝐶𝑝𝑞
2𝐴𝑝𝑞 ) (𝜑𝑞 − 𝐶𝑝𝑞) ≤ 2√𝐴𝑝𝑞𝐵𝑝𝑞
(20)
The sign before the square root in equation (20a) is negative for the oscillation stage that
moves from −𝜑0 to +𝜑0 and vice versa.
In rare occasions there may be a possibility of having 𝐾𝑝𝑞 = 0 for one or two
discretizations and this would result in a computational error. This scenario occurs around the
turning points or relatively flat regions of the restoring force and is likely when 𝑛 is very large.
When this happens, it can be eliminated by increasing or decreasing 𝑛 slightly.
4. RESULTS AND DISCUSSIONS
In order to investigate the periodic response of the slider-crank mechanism in Figure 1,
the following inputs were used except where it is otherwise stated: 𝑟 = 0.10𝑚; 𝑙 = 0.50𝑚;
𝑀𝑐 = 0.50𝑘𝑔; 𝑀𝑠 = 0.30𝑘𝑔; 𝐹 = 1.0𝑁. These input values were also used to simulate the
plots in Figures 2 to 4 above.
The CPLM algorithm explained in Section 3 was implemented by means of a simple
Mathematica code that was used to simulate the periodic response of the slider-crank
oscillations. The CPLM parameters that were determined from the restoring force are: 𝐾𝑝𝑞 =
[𝑔(𝜑𝑞) − 𝑔(𝜑𝑝)]/(𝜑𝑞 − 𝜑𝑝), 𝐶𝑝𝑞 = 𝜑𝑝 − 𝑔(𝜑𝑝)/𝐾𝑝𝑞 and 𝑝 = ±√|2∫ −𝑔(𝜑)𝑑𝜑𝜑𝑝
𝜑0|.
We note that 𝐾𝑝𝑞 and 𝐶𝑝𝑞 can be easily calculated from equation (15) while the expression
to calculate 𝑟 was derived from equation (12) as:
World Scientific News 142 (2020) 1-24
-11-
𝑝 = ±√2𝐹𝑟[cos𝜑𝑝 − cos𝜑0 + Ω(√1 − Ω2 sin2 𝜑𝑝 −√1 − Ω2 sin2𝜑0 )]
𝑀𝑐𝑟2 +𝑀𝑠𝑟2 (sin𝜑𝑝 +12 (𝛺𝑐) sin 2𝜑𝑝)
2 (21)
The remaining parameters of the CPLM algorithm depend on these three parameters and
the discretization process. The CPLM algorithm for equations (14) and (15) has been
summarized in the pseudocode algorithm provided in the appendix.
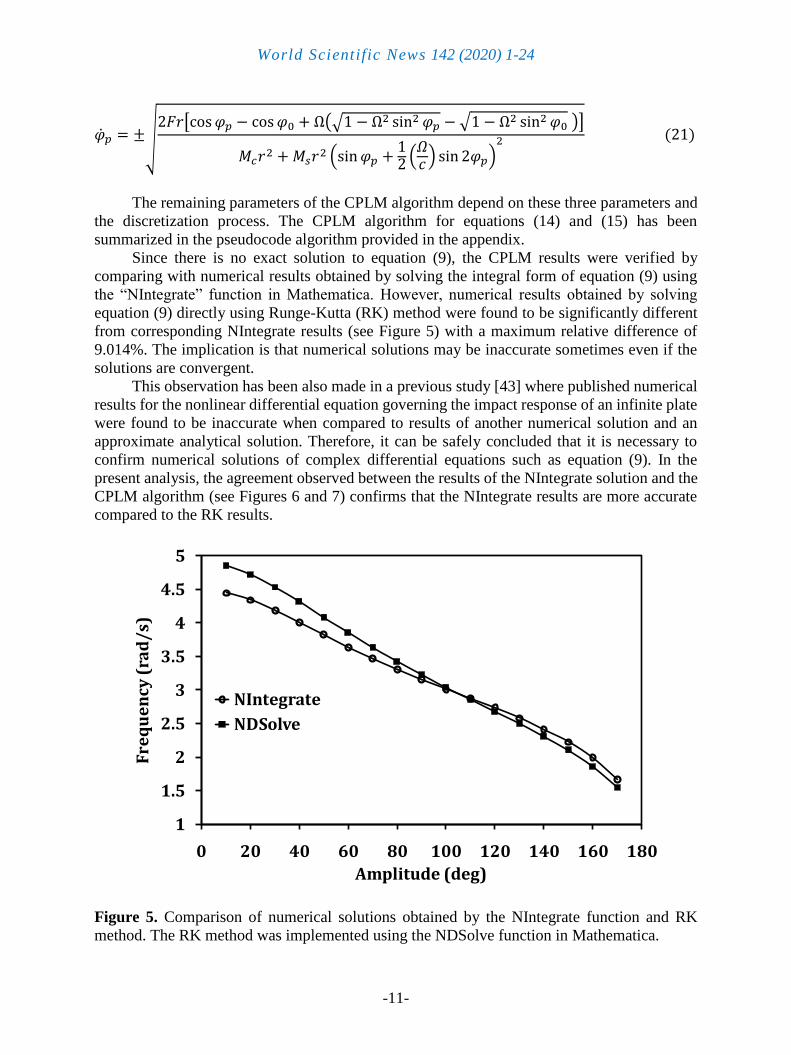
Since there is no exact solution to equation (9), the CPLM results were verified by
comparing with numerical results obtained by solving the integral form of equation (9) using
the “NIntegrate” function in Mathematica. However, numerical results obtained by solving
equation (9) directly using Runge-Kutta (RK) method were found to be significantly different
from corresponding NIntegrate results (see Figure 5) with a maximum relative difference of
9.014%. The implication is that numerical solutions may be inaccurate sometimes even if the
solutions are convergent.
This observation has been also made in a previous study [43] where published numerical
results for the nonlinear differential equation governing the impact response of an infinite plate
were found to be inaccurate when compared to results of another numerical solution and an
approximate analytical solution. Therefore, it can be safely concluded that it is necessary to
confirm numerical solutions of complex differential equations such as equation (9). In the
present analysis, the agreement observed between the results of the NIntegrate solution and the
CPLM algorithm (see Figures 6 and 7) confirms that the NIntegrate results are more accurate
compared to the RK results.
Figure 5. Comparison of numerical solutions obtained by the NIntegrate function and RK
method. The RK method was implemented using the NDSolve function in Mathematica.
1
1.5
2
2.5
3
3.5
4
4.5
5
0 20 40 60 80 100 120 140 160 180
Fre
qu
en
cy (
rad
/s)
Amplitude (deg)
NIntegrate
NDSolve

World Scientific News 142 (2020) 1-24
-12-
Figure 6. Frequency-amplitude response of the crank oscillation for 10° ≤ 𝜑0 ≤ 170°.
Figure 7. Error analysis in CPLM solution for the frequency-amplitude response of
the crank oscillation.
1.6
2
2.4
2.8
3.2
3.6
4
4.4
4.8
0 20 40 60 80 100 120 140 160 180
Fre
qu
en
cy (
rad
/s)
Amplitude (deg)
Numerical
CPLM ( n = 25 )
CPLM ( n = 50 )
CPLM ( n = 100 )
CPLM ( n = 200 )
0
0.5
1
1.5
2
2.5
3
3.5
0 20 40 60 80 100 120 140 160 180
Re
lati
ve d
iffe
ren
ce (
%)
Amplitude (deg)
CPLM ( n = 25 )
CPLM ( n = 50 )
CPLM ( n = 100 )
CPLM ( n = 200 )

World Scientific News 142 (2020) 1-24
-13-
4. 1. Frequency-amplitude response
The frequency-amplitude response for initial amplitudes in the range of 10° ≤ 𝜑0 ≤170° is shown in Figure 6. The figure shows both CPLM and NIntegrate results. The CPLM
results are seen to converge as 𝑛 increases from 25 to 200. The corresponding relative
percentage differences (RPDs) between the CPLM results and the NIntegrate results are shown
in Figure 7.
The maximum RPD for 𝑛 = 25 is 3.297%, 𝑛 = 50 is 2.186%, 𝑛 = 100 is 1.479% and
for 𝑛 = 200 is 1.018%. Furthermore, the CPLM frequency for 𝑛 = 200 when 𝜑0 = 179° is
1.10978 rad/s with an RPD of 2.53432%. These RPDs are well within acceptable limits in
engineering practice. However, more accurate results can be obtained by using 𝑛 > 200.
Figure 6 also reveals that the frequency decreases steadily with an increase in amplitude.
Since the time period of the crank is twice that of the slider, it implies that the frequency
response of the slider is twice that of the crank and has the same trend as in Figure 6.
4. 2. Effect of geometric constant on frequency response
To ensure that the slider does not lift off the floor the following constraint is imposed:
𝑥0/(𝑟 + 𝑙) ≥ 𝑘, where 0 < 𝑘 < 1 and 𝑥0 is the slider position at maximum crank angle, 𝜑0.
For the limit, 𝑘 = 0, the condition of 𝑥0 = 0 represents a case in which the initial slider position
coincides with the crank centre and it implies that 𝜑0 = 90° while 𝑟 = 𝑙. On the other hand,
when 𝑘 = 1 the condition of 𝑥0 = 𝑟 + 𝑙 represents a situation where there is no oscillation
because 𝜑0 = 0°. However, the condition of 𝑥0 > 𝑟 + 𝑙 is impossible by virtue of the kinematic
constraint.
Substituting equation (1a) in the ‘no-lift’ constraint gives:
Ω cos𝜑0 +√1 − Ω2 sin2𝜑0 ≥ 𝑘(Ω + 1) (22)
The solution to equation (22) provides the range of values of the geometric constant (see
equation (23)) for which the slider does not lift off the floor.
Ω ≤1 − 𝑘2
1 + 𝑘2 − 2𝑘 cos𝜑0 (23)
Equation (23) can be used for design purposes and we can deduce from this equation that Ω ≤(1 − 𝑘2)/(1 + 𝑘2) < 1 for all 𝑘 when 𝜑0 = 90°, whereas Ω ≤ 1 for all possible values of 𝜑0
when 𝑘 = 0.
To simulate the effect of the geometric constant on the frequency response, 𝑘 = 0.1 was
assumed. This means that the distance from the slider position to the crank centre cannot be
less than 0.1 × (𝑟 + 𝑙). Therefore, when 𝜑0 = 60°, Ω ≤ 1.0879 and when 𝜑0 = 120°, Ω ≤0.8919. Figures 8 and 9 show the variation of the frequency with Ω for different crank radii
when 𝜑0 = 60° and 120° respectively. In these figures and subsequent ones, the CPLM results
are plotted as solid lines while the numerical integration results are plotted as circle markers.
The results show that for the same value of Ω the frequency decreases with an increase in
crank radius. In addition, Figures 8 and 9 reveal the existence of asymptotic behaviour as Ω →0 and Ω → 1.0.

World Scientific News 142 (2020) 1-24
-14-
Figure 8. Effect of geometric constant on frequency response
for various crank radii when 𝜑0 = 60°.
Figure 9. Effect of geometric constant on frequency response
for various crank radii when 𝜑0 = 120°.
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 0.2 0.4 0.6 0.8 1
Fre
qu
en
cy (
rad
/s)
Ω
r = 0.1 r = 0.2r = 0.3
r = 0.4 r = 0.5
0
0.5
1
1.5
2
2.5
3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Fre
qu
en
cy (
rad
/s)
Ω
r = 0.1 r = 0.2r = 0.3
r = 0.4 r = 0.5

World Scientific News 142 (2020) 1-24
-15-
4. 3. Asymptotic models
Figures 8 and 9 revealed the presence of asymptotic response under two limiting
geometric conditions and the oscillation models for the asymptotic responses can be derived as
follows.
Case 1: Ω → 0
Applying this condition in equations (3) and (7) gives the following: 𝐽(𝜑) = 𝑀𝑐𝑟2 +
𝑀𝑠𝑟2 sin2 𝜑, 𝐽′(𝜑) = 𝑀𝑠𝑟
2 sin 2𝜑 and 𝑄(𝜑) = −𝐹𝑟 sin𝜑. Therefore, substituting these
expressions in equation (6), the oscillation model of the crank was derived as equation (24).
(𝑀𝑐𝑟2 +𝑀𝑠𝑟
2 sin2𝜑) +1
2𝑀𝑠𝑟
2 sin 2𝜑 2 + 𝐹𝑟 sin𝜑 = 0 (24)
Furthermore, ℎ(𝜑) = −𝐹𝑟 cos𝜑 and ℎ(𝜑0) = −𝐹𝑟 cos𝜑0 . Hence, the restoring force
was obtained from equation (14) as:
𝑔(𝜑) =𝐹
𝑟(𝑀𝑠 sin 2𝜑 (cos 𝜑 − cos𝜑0)
(𝑀𝑐 +𝑀𝑠 sin2 𝜑)2+
sin𝜑
𝑀𝑐 +𝑀𝑠 sin2 𝜑) (25)
Case 2: Ω → 1.0
Following the same approach as in Case 1 above, we get: 𝐽(𝜑) = 𝑀𝑐𝑟2 + 4𝑀𝑠𝑟
2 sin2 𝜑,
𝐽′(𝜑) = 4𝑀𝑠𝑟2 sin 2𝜑 and 𝑄(𝜑) = −2𝐹𝑟 sin𝜑. Therefore, the oscillation model of the crank
becomes:
(𝑀𝑐𝑟2 + 4𝑀𝑠𝑟
2 sin2 𝜑) + 2𝑀𝑠𝑟2 sin 2𝜑 2 + 2𝐹𝑟 sin𝜑 = 0 (26)
Also, ℎ(𝜑) = −2𝐹𝑟 cos𝜑 and ℎ(𝜑0) = −2𝐹𝑟 cos𝜑0, so that the restoring force is:
𝑔(𝜑) =2𝐹
𝑟(4𝑀𝑠 sin 2𝜑 (cos𝜑 − cos𝜑0)
(𝑀𝑐 + 4𝑀𝑠 sin2 𝜑)2+
sin𝜑
𝑀𝑐 + 4𝑀𝑠 sin2 𝜑) (27)
Equations (24) to (27) are simplified models that are applicable in the asymptotic
conditions stated and can be used for the analysis of the oscillations of the slider-crank
mechanism instead of the more complicated equations derived in equations (9), (14) and (15).
The results plotted in Figures 8 and 9 show that equations (24) and (25) can be applied
when Ω ≤ 0.10 with a maximum RPD of 1.24% at Ω = 0.10. Also, equations (26) and (27) are
applicable with a maximum RPD of 0.60% provided 0.99 ≤ Ω ≤ 1.01.
4. 4. Oscillation histories
In reciprocating engines, the timing of the piston oscillations is important for estimating
the desired thrust on the crank. Therefore, an understanding of the time-domain response for
the free nonlinear oscillations of the slider-crank mechanism can be used for the design of
reciprocating engines.

World Scientific News 142 (2020) 1-24
-16-
Hence, the oscillation histories for small (0° < 𝜑0 ≤ 10°), moderate (10° < 𝜑0 ≤ 90°) and large (90° ≤ 𝜑0 < 180°) initial amplitudes are plotted in Figures 10 to 12.
The small-amplitude oscillation (Figure 10) appears to be harmonic and may be predicted
with reasonable accuracy using a simple harmonic profile. On the other hand, the moderate-
amplitude (Figure 11) and large-amplitude (Figure 12) oscillations exhibit a strong anharmonic
response that is more obvious from the velocity response.
The CPLM solution captured the anharmonic response accurately and this demonstrates
its ability to handle the solution of complex conservative oscillators. Interestingly, the CPLM
does this with remarkable simplicity and is therefore recommended for analysis of other
complex conservative oscillators.
Figure 10. Displacement and velocity histories for crank and slider oscillations
when 𝜑0 = 10°.
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
Cra
nk
dis
pla
ce
me
nt
(ra
d)
Time (s)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
Cra
nk
ve
loc
ity
(ra
d/
s)
Time (s)
0.598
0.5985
0.599
0.5995
0.6
0.6005
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
Sli
de
r d
isp
lac
em
en
t (m
)
Time (s)
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
Sli
de
r v
elo
cit
y (
m/
s)
Time (s)

World Scientific News 142 (2020) 1-24
-17-
Figure 11. Displacement and velocity histories for crank and slider oscillations
when 𝜑0 = 60°.
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Cra
nk
dis
pla
ce
me
nt
(ra
d)
Time (s)
-5
-4
-3
-2
-1
0
1
2
3
4
5
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Cra
nk
ve
loc
ity
(ra
d/
s)
Time (s)
0.53
0.54
0.55
0.56
0.57
0.58
0.59
0.6
0.61
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Sli
de
r d
isp
lac
em
en
t (m
)
Time (s)
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Sli
de
r v
elo
cit
y (
m/
s)
Time (s)

World Scientific News 142 (2020) 1-24
-18-
Figure 12. Displacement and velocity histories for crank and slider oscillations
when 𝜑0 = 150°.
5. CONCLUSIONS
In this paper, the approximate periodic solution to the complex nonlinear oscillations
arising in the slider-crank mechanism was investigated using the continuous piecewise
linearization method. First, the model governing the oscillation of the crank was formulated
using the Lagrangian approach and found to be a non-natural oscillator model. A conservative
form of the model was derived in order to determine the expression for the restoring force,
which is necessary for the CPLM solution. The results of the CPLM algorithm were verified
using numerical solutions and the maximum relative percentage difference for the amplitude
range 10° < 𝜑0 ≤ 170° when 𝑛 = 200 was found to be 1.018%.
A ‘no-lift’ constraint was applied to derive an expression for the geometric limit that will
ensure that the slider does not lift off the floor during oscillation. The geometric limit was used
to investigate the effect of a geometric ratio (i.e. crank radius to length of connecting rod) on
the frequency response of the slider-crank mechanism. The analysis showed that the periodic
response of the system exhibits asymptotic response when the geometric ratio is close to zero
-3
-2
-1
0
1
2
3
0 0.5 1 1.5 2 2.5 3
Cra
nk
dis
pla
ce
me
nt
(ra
d)
Time (s)
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 0.5 1 1.5 2 2.5 3
Cra
nk
ve
loc
ity
(ra
d/
s)
Time (s)
0.4
0.45
0.5
0.55
0.6
0.65
0 0.5 1 1.5 2 2.5 3
Sli
de
r d
isp
lac
em
en
t (m
)
Time (s)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5 3
Sli
de
r v
elo
cit
y (
m/
s)
Time (s)

World Scientific News 142 (2020) 1-24
-19-
or unity. Hence, asymptotic oscillation models were derived for the two limiting cases and
found to be much simpler when compared to the original oscillation model. The range of
application of the asymptotic models was also discussed.
Finally, the oscillation histories for small-, moderate- and large-amplitude oscillations
were investigated. It was observed that the small-amplitude response is sinusoidal and can be
approximated by a simple harmonic response. Hence, solution schemes that use simple
harmonic approximation (e.g. the lowest order approximation of the energy balance method
[27] can be used to estimate the periodic response for small-amplitude oscillations. However,
the moderate- and large-amplitude oscillations exhibited anharmonic responses, thus
confirming the presence of strong nonlinearity. The nonlinear effect was found to increase with
amplitude and can be observed more clearly from the velocity response.
The results show that the CPLM algorithm was able to predict the oscillation history of
the slider-crank mechanism accurately. Hence, the CPLM algorithm is recommended for the
analysis of complex conservative oscillators due to its simplicity and accuracy.
ACKNOWLEDGMENT/FUNDING
The authors would like to appreciate Mr Wellington C. Anele-Nwala for assisting to create the illustration of the
slider-crank mechanism. This research did not receive any specific grant from funding agencies in the public,
commercial, or not-for-profit sectors.
References
[1] Big-Alabo, A (2018): Periodic solutions of Duffing-type oscillators using continuous
piecewise linearization method, Mechanical Engineering Research, 8(1), 41-52.
[2] Belendez, A, Hernandez, A, Marquez, A, Belendez, T and Neipp, C (2006): Analytical
approximations for the period of a nonlinear pendulum, Eur. Journal of Physics, 27,
539-551.
[3] Lai, S K, Lim, C W, Lin, Z Zhang, W (2011): Analytical analysis for large-amplitude
oscillation of a rotational pendulum system, Applied Mathematics and Computation,
217, 6115-6124.
[4] Belendez, A, Alvarez, M L, Fernandez, E, Pascual, I (2009): Cubication of conservative
nonlinear oscillators, Eur. Journal of Physics, 30(5), 973-981.
[5] Big-Alabo, A (2019): A simple cubication method for approximate solution of
nonlinear Hamiltonian oscillators, International Journal of Mechanical Engineering
Education, DOI:10.1177/0306419018822489
[6] Big-Alabo, A and Ogbodo, C O (2019): Dynamic analysis of crank mechanism with
complex trigonometric nonlinearity: a comparative study of approximate analytical
methods, Springer Nature Applied Sciences, 1(6), 7 pages.
[7] Cveticanin, L (2001): Vibrations of a coupled two-degree-of-freedom system, Journal
of Sound and Vibration, 242(2), 279-292.
World Scientific News 142 (2020) 1-24
-20-
[8] Lai S K and Lim C W (2007): Nonlinear vibration of a two-mass system with nonlinear
stiffnesses, Nonlinear Dynamics, 49, 233-249.
[9] Big-Alabo, A and Ossia C V (2019): Analysis of the coupled nonlinear vibration of a
two-mass system, Journal of Applied and Computational Mechanics, 5(5), 935-950.
DOI:10.22055/JACM.2019.28296.1474
[10] Israr A, Cartmell M P, Manoach E, Trendafilova I, Ostachowicz W M, Krawczuk M,
Zak A (2009): Analytical modelling and vibration analysis of partially cracked
rectangular plates with different boundary conditions and loading, Journal of Applied
Mechanics, 76, 1-9.
[11] Ismail R and Cartmell M P (2012): An investigation into the vibration analysis of a
plate with a surface crack of variable angular orientation, Journal of Sound and
Vibration, 331, 2929-2948.
[12] Hamden M N, Shabaneh N H (1997): On the large amplitude free vibrations of a
restrained uniform beam carrying an intermediate lumped mass, Journal of Sound and
Vibration, 199(5), 711-736.
[13] Big-Alabo, A (2018): Continuous piecewise linearization method for approximate
periodic solution of the relativistic oscillator, International Journal of Mechanical
Engineering Education, DOI:10.1177/0306419018812861
[14] Beléndez, A, Pascual, C, Méndez, D I, Neipp, C (2008): Solution of the relativistic
(an)harmonic oscillator using the harmonic balance method, Journal of Sound and
Vibration, 311, 1447-1456.
[15] Ismail G M, Abul-Ez M, Farea N M, Saad N (2019): Analytical approximations to
nonlinear oscillation of nanoelectro-mechanical resonators, Eur. Physical Journal Plus,
134, 47.
[16] Ghalambaz M, Ghalambaz M, Edalatifar M (2016): Nonlinear oscillation of
nanoelectro-mechanical resonators using energy balance method: considering the size
effect and the van der Waals force, Appied Nanoscience, 6, 309-317.
[17] Wu Y and He J H (2018): Homotopy perturbation method for nonlinear oscillators with
coordinate-dependent mass, Results in Physics, 10, 270-271.
[18] Wang Y and An J Y (2019): Amplitude–frequency relationship to a fractional Duffing
oscillator arising in microphysics and tsunami motion, Journal of Low Frequency Noise,
Vibration and Active Control, Vol. 38(3–4) 1008–1012.
DOI:10.1177/1461348418795813
[19] Cheung Y K, Chen S H, Lau S L (1991): A modified Lindstedt-Poincare method for
certain strongly non-linear oscillators, International Journal of Non-Linear Mechanics,
26 (3/4), 367-378.
[20] He J H (1999): Variational iteration method: a kind of nonlinear analytical technique:
some examples, International Journal of Nonlinear Mechanics, 34(4), 699-708.
[21] He J H (2003): Linearized perturbation technique and its applications to strongly
nonlinear oscillators, Computers & Mathematics with Applications, 45(1-3), 1-8.
World Scientific News 142 (2020) 1-24
-21-
[22] Hosen M A, Chowdhury M S H, Ali M Y and Ismail A F (2018): A New Analytical
Technique for Solving Nonlinear Non-smooth Oscillators Based on the Rational
Harmonic Balance Method in: R Saian and M A Abbas (eds.), Proceedings of the
Second International Conference on the Future of ASEAN (ICoFA) 2017 – Volume 2.
[23] Qian Y H, Pan J L, Chen S P, Yao M H (2017): The Spreading Residue Harmonic
Balance Method for Strongly Nonlinear Vibrations of a Restrained Cantilever Beam,
Advances in Mathematical Physics, Volume 2017, Article ID 5214616, 8 pages.
[24] Laio, S K (1994): On the homotopy analysis method for nonlinear problems, Applied
Mathematics and Computation, 147(2), 499-513.
[25] Adomian, G A (1988): Review of the decomposition method in applied mathematics,
Journal of Mathematical Analysis and Applications, 135, 501-544.
[26] He, J H (1999): Homotopy perturbation technique, Computer Methods in Applied
Mechanics and Engineering, 178(3/4), 257-262.
[27] He, J H (2002): Preliminary report on the energy balance for nonlinear oscillations,
Mechanics Research Communications, 29, 107-111.
[28] He J H (2010): Hamiltonian approach to nonlinear oscillators, Physics Letters A, 2312-
2314.
[29] Elıas-Zuniga A and Martınez-Romero O (2013): Accurate solutions of conservative
nonlinear oscillators by the enhanced cubication method, Mathematical Problems in
Engineering, Article ID 842423, 9 pages.
[30] He J H (2007): Variational approach for nonlinear oscillators, Chaos, Solitons and
Fractals, 34, 1430.
[31] Big-Alabo A and Ossia C V (2020): Periodic solution of nonlinear conservative
systems, IntechOpen, DOI:10.5772/intechopen.90282
[32] Ansari K A and Khan N U (1986): Nonlinear vibrations of a slider-crank mechanism,
Applied Mathematical Modelling, 10, 114-118.
[33] Chen J S and Haung C L (2000): Dynamic analysis of flexible slider-crank mechanisms
with non-linear finite element method, Journal of Sound and Vibration, 246(3), 389-
402.
[34] Chen J S and Chain C H (2001): Effects of Crank Length on the Dynamics Behavior of
a Flexible Connecting Rod, Journal of Vibration and Acoustics, 123, 318-323.
[35] Ha J L, Fung R F, Chen K Y, Hsien S C (2006): Dynamic modeling and identification
of a slider-crank mechanism, Journal of Sound and Vibration, 289, 1019-1044.
[36] Akbari S, Fallahi F, Pirbodaghi T (2016): Dynamic analysis and controller design for a
slider-crank mechanism with piezoelectric actuators, Journal of Computational Design
and Engineering, 3, 312-321.
[37] Erkaya S, Su S, Uzmay I (2007): Dynamic analysis of a slider-crank mechanism with
eccentric connector and planetary gears, Mechanism and Machine Theory, 42, 393-408.

World Scientific News 142 (2020) 1-24
-22-
[38] Chen J S and Chain C H (2003): On the Nonlinear Response of a Flexible Connecting
Rod, Journal of Mechanical Design, 125, 757-763.
[39] Daniel G B and Cavalca K L (2011): Analysis of the dynamics of a slider-crank
mechanism with hydrodynamic lubrication in the connecting rod–slider joint clearance,
Mechanism and Machine Theory, 46, 1434-1452.
[40] Reis V L, Daniel G B, Cavalca K L (2014): Dynamic analysis of a lubricated planar
slider-crank mechanism considering friction and Hertz contact effects, Mechanism and
Machine Theory, 74, 257-273.
[41] Fidlin, A (2005): Nonlinear oscillations in Mechanical Engineering, Springer, New
York.
[42] Nayfeh, A H and Mook, D T (1995): Nonlinear oscillations. New York: John Wiley &
Sons.
[43] Big-Alabo, A, Cartmell, M P, Harrison P (2017): On the solution of asymptotic impact
problems with significant localised indentation, Proceedings of IMechE Part C: Journal
of Mechanical Engineering Sciences, 231(5), 807-822.

World Scientific News 142 (2020) 1-24
-23-
APPENDIX
PSEUDOCODE ALGORITHM FOR CPLM SOLUTION OF CRANK
OSCILLATIONS
START
GET (𝜑0, 𝑛, 𝜔0, Ω) **Input values**
∆𝜑 = 𝜑0/𝑛 ; **Displacement increment for each discretization**
𝑝 = 0; PUT (0, “,” 𝜑0, “,”, 0) **Initialize 𝑝 and print initial time, displacement and
velocity**
IF (𝜑0 > 0) THEN **𝜑0 > 0 implies negative velocity oscillation stage**
DO UNTIL (𝑝 = 2𝑛)
𝜑𝑝 = 𝜑0 − 𝑝∆𝜑; 𝑞 = 𝑝 + 1; 𝜑𝑞 = 𝜑0 − 𝑞∆𝜑;
𝑝 = −√2𝐹𝑟[cos𝜑𝑝 − cos𝜑0 + Ω(√1 − Ω2 sin2𝜑𝑝 −√1 − Ω2 sin2 𝜑0 )]
𝑀𝑐𝑟2 +𝑀𝑠𝑟2 (sin 𝜑𝑝 +12 (𝛺𝑐) sin 2𝜑𝑝)
2
𝑞 = −√2𝐹𝑟[cos𝜑𝑞 − cos𝜑0 + Ω(√1 − Ω2 sin2𝜑𝑞 −√1 − Ω2 sin2 𝜑0 )]
𝑀𝑐𝑟2 +𝑀𝑠𝑟2 (sin 𝜑𝑞 +12 (𝛺𝑐) sin 2𝜑𝑞)
2
𝐾𝑝𝑞 = [𝑔(𝜑𝑞) − 𝑔(𝜑𝑝)]/(𝜑𝑞 − 𝜑𝑝); **where 𝑔(𝜑) is given in
equation (15) **
IF (𝐾𝑝𝑞 > 0) THEN
𝜔𝑝𝑞 = √𝐾𝑝𝑞; 𝐶𝑝𝑞 = 𝜑𝑝 − 𝑔(𝜑𝑝)/𝐾𝑝𝑞;
𝑅𝑝𝑞 = [(𝜑𝑝 − 𝐶𝑝𝑞)2+ (𝑝/𝜔𝑝𝑞)
2]1/2
;
IF (𝑝 = 0) THEN
Φ𝑝𝑞 = 0.5𝜋 ;
ELSEIF (𝑝 < 0) THEN
Φ𝑝𝑞 = 𝜋 + tan−1[𝜔𝑝𝑞(𝜑𝑝 − 𝐶𝑝𝑞)/𝑝] ;
END_ELSEIF

World Scientific News 142 (2020) 1-24
-24-
IF ((𝜑𝑞 − 𝐶𝑝𝑞) ≥ 𝑅𝑝𝑞) THEN
∆𝑡 = (0.5𝜋 − Φ𝑝𝑞)/𝜔𝑝𝑞 ;
ELSEIF ((𝜑𝑞 − 𝐶𝑝𝑞) < 𝑅𝑝𝑞) THEN
∆𝑡 = (0.5𝜋 + cos−1[(𝜑𝑞 − 𝐶𝑝𝑞)/𝑅𝑝𝑞] − Φ𝑝𝑞)/𝜔𝑝𝑞 ;
END_ELSEIF
ELSEIF (𝐾𝑝𝑞 < 0) THEN
𝜔𝑝𝑞 = √|𝐾𝑝𝑞|; 𝐶𝑝𝑞 = 𝜑𝑝 + 𝑔(𝜑𝑝)/|𝐾𝑝𝑞| ;
𝐴𝑝𝑞 =1
2(𝜑𝑝 − 𝐶𝑝𝑞 + 𝑝/𝜔𝑝𝑞); 𝐵𝑝𝑞 =
1
2(𝜑𝑟 − 𝐶𝑝𝑞 − 𝑝/𝜔𝑝𝑞) ;
∆𝑡 =1
𝜔𝑝𝑞log𝑒
[ (𝜑𝑞 − 𝐶𝑝𝑞) ± √(𝜑𝑞 − 𝐶𝑝𝑞)
2− 4𝐴𝑝𝑞𝐵𝑝𝑞
2𝐴𝑝𝑞
]
;
END_ELSEIF
𝑡𝑞 = 𝑡𝑝 + ∆𝑡;
PUT (𝑡𝑞, “,” 𝜑𝑞, “,”, 𝑞) **Prints the time, displacement and velocity at end
state**
𝑝 = 𝑝 + 1; 𝜑𝑝 = 𝜑𝑞; 𝑝 = 𝑞; **Update initial conditions for the next
discretization**
END_DO
END_THEN
STOP
The pseudocode algorithm is for the negative velocity oscillation stage (i.e. < 0) when the
crank oscillates from +𝜑0 to −𝜑0. This stage constitutes the first half-cycle of the oscillation.
For the remaining half-cycle when the crank oscillates from −𝜑0 back to +𝜑0 a similar
algorithm is applicable and the necessary changes can be made by referring to Section 3.