search: heuristic &optimal artificial intelligence cmsc 25000 january 16, 2003
TRANSCRIPT
Search: Heuristic &Optimal
Artificial Intelligence
CMSC 25000
January 16, 2003

Agenda
• Heuristic Search– Local: Hill-climbing, Beam Search
• Limitations of local heuristics
– Global: Best first
• Optimal Search– A* search
• Admissible, consistent heuristics• Dynamic programming
• Problem representation– Configuration space

Searches
• Blind search: Find ANY path to goal– Know something about search space:
• Most paths reach goal or terminate quickly: DFS• Low branching factor, possible long paths: BFS• Always ready to act: ID-DFS
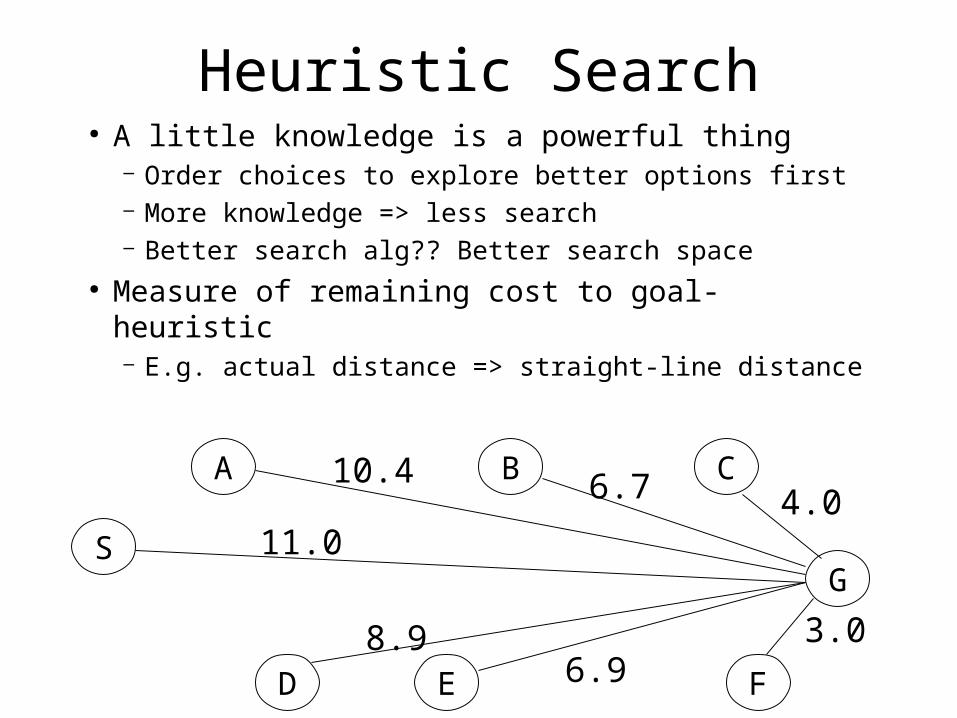
Heuristic Search● A little knowledge is a powerful thing
– Order choices to explore better options first– More knowledge => less search– Better search alg?? Better search space
● Measure of remaining cost to goal-heuristic– E.g. actual distance => straight-line distance
S
D
A
E
B C
F
G
4.06.710.4
11.0
8.96.9
3.0
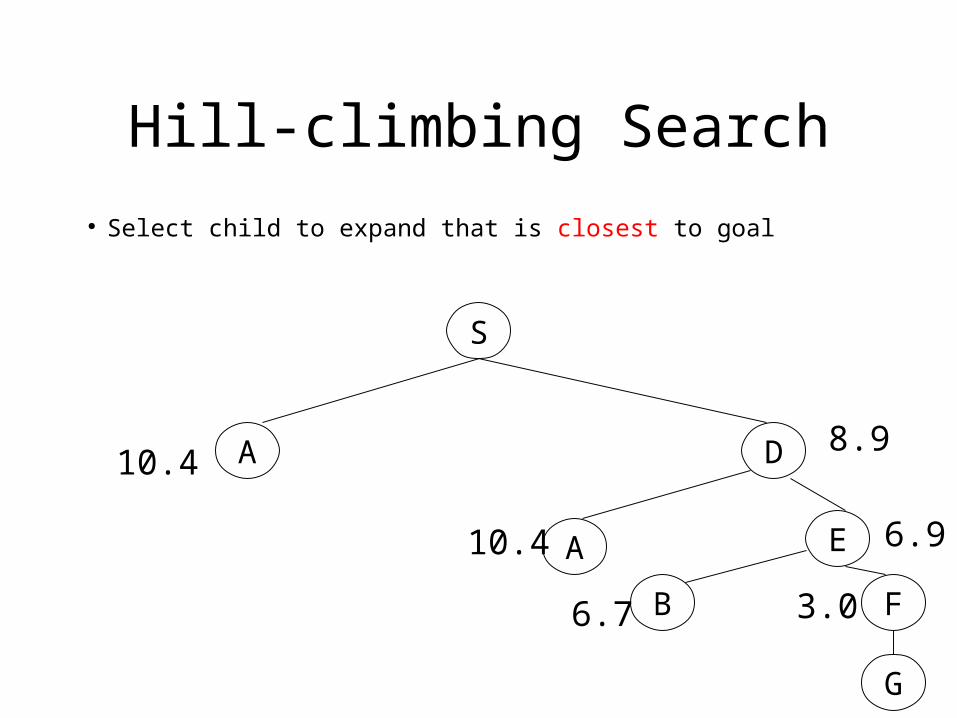
Hill-climbing Search
● Select child to expand that is closest to goal
S
A10.4 D 8.9
A10.4 E 6.9
B6.7 F3.0
G

Hill-climbing Search Algorithm
● Form a 1-element queue of 0 cost=root node● Until first path in queue ends at goal or no
paths– Remove 1st path from queue; extend path one
step– Reject all paths with loops– Sort new paths by estimated distance to goal– Add new paths to FRONT of queue
● If goal found=>success; else, failure

Beam Search● Breadth-first search of fixed width - top w
– Guarantees limited branching factor, E.g. w=2
S
A D
B D A E
10.4 8.9
6.7 8.9 10.4 6.9
C E B F4.0 6.9 6.7 3
A C G

Beam Search Algorithm
– Form a 1-element queue of 0 cost=root node– Until first path in queue ends at goal or no
paths● Extend all paths one step● Reject all paths with loops• Sort all paths in queue by estimated distance to
goal– Put top w in queue
– If goal found=>success; else, failure
Best-first Search● Expand best open node ANYWHERE in tree
– Form a 1-element queue of 0 cost=root node– Until first path in queue ends at goal or no paths
● Remove 1st path from queue; extend path one step● Reject all paths with loops● Put in queue• Sort all paths by estimated distance to goal
– If goal found=>success; else, failure

Heuristic Search Issues● Parameter-oriented hill climbing
– Make one step adjustments to all parameters● E.g. tuning brightness, contrast, r, g, b on TV
– Test effect on performance measure● Problems:
– Foothill problem: aka local maximum● All one-step changes - worse!, but not global max
– Plateau problem: one-step changes, no FOM +– Ridge problem: all one-steps down, but not even
local max● Solution (local max): Randomize!!

Search CostsType Worst / Worst
Time SpaceReachGoal?
Depth-first B^d+1/ Bd Yes
Breadth-first B^d+1/B^d Yes
Hill-Climbing(no backup)
D / B No
Hill-Climbing B^d+1 /Bd Yes
Beam Search Wd / WB No
Best-first B^d+1/B^d Yes

Searches
• Heuristic search: Any path, but find faster– Estimate remaining distance to goal– Best from current node: Hill-climbing– Best from any node: Best first– Best w at this depth: Beam search

Optimal Search
• Find BEST path to goal– Find best path EFFICIENTLY
• Exhaustive search: – Try all paths: return best
• Optimal paths with less work:– Expand shortest paths– Expanded shortest expected paths– Eliminate repeated work - dynamic programming

Efficient Optimal Search
• Find best path without exploring all paths– Use knowledge about path lengths
• Maintain path & path length– Expand shortest paths first– Halt if partial path length > complete path length
Underestimates
• Improve estimate of complete path length– Add (under)estimate of remaining distance– u(total path dist) = d(partial path)+u(remaining)– Underestimates must ultimately yield shortest– Stop if all u(total path dist) > d(complete path)
• Straight-line distance => underestimate
• Better estimate => Better search • No missteps
Search with Dynamic Programming
• Avoid duplicating work– Dynamic Programming principle:
• Shortest path from S to G through I is shortest path from S to I plus shortest path from I to G
• No need to consider other routes to or from I

A* Search Algorithm• Combines good optimal search ideas
– Dynamic programming and underestimates
• Form a 1-element queue of 0 cost=root node
• Until first path in queue ends at goal or no paths– Remove 1st path from queue; extend path one step– Reject all paths with loops
• For all paths with same terminal node, keep only shortest
– Add new paths to queue– Sort all paths by total length underestimate, shortest
first (d(partial path) + u(remaining))
• If goal found=>success; else, failure

A* Search Example
S
A D13.4 12.9
A E19.4 12.9
B F17.7 13
G 13
Heuristics
• A* search: only as good as the heuristic
• Heuristic requirements:– Admissible:
• UNDERESTIMATE true remaining cost to goal
– Consistent:• h(n) <= c(n,a,n') + h(n')
• Some heuristics better than others– 0?
Constructing Heuristics
• Relaxation:– State problem – Remove one or more constraints
• What is the cost then?
• Example:– 8-square: Move A to B if
• 1) A &B horizontally or vertically adjacent, and• 2) B is empty
– Ignore 1) -> Manhattan distance– Ignore 1) & 2): # of misplaced squares

Navigation
Application: Configuration Space
• Problem: Robot navigation– Move robot between two objects without
changing orientation– Possible?
• Complex search space: boundary tests, etc
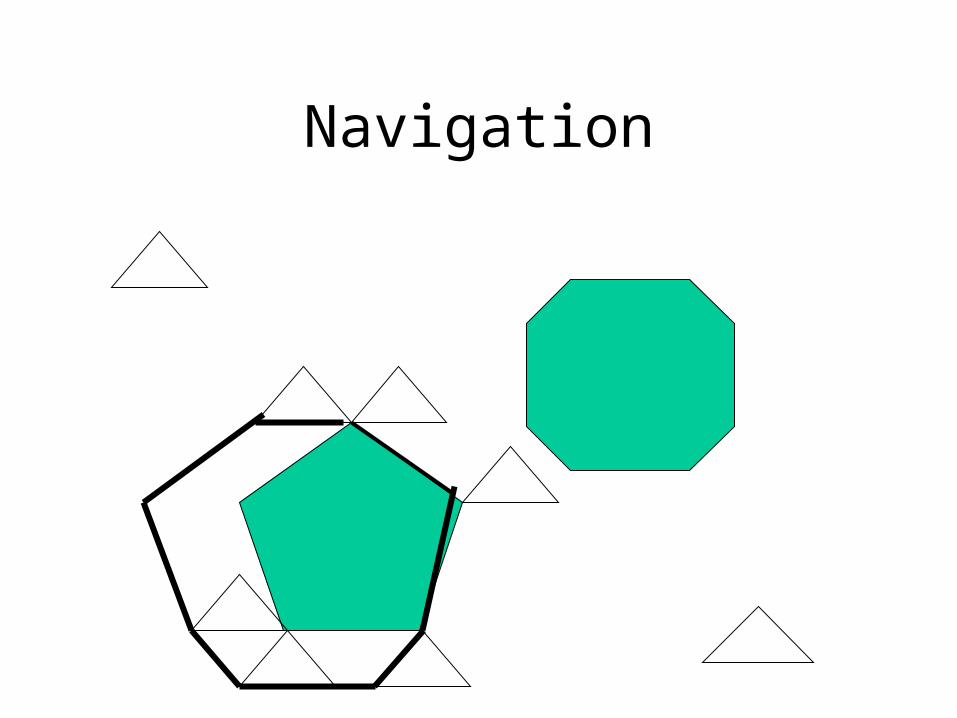
• First step: Problem transformation– Model robot as point– Model obstacles by combining their perimeter +
path of robot around it– “Configuration Space”: simpler search
Navigation

Navigation

Navigation as Simple Search
• Replace funny robot shape in field of funny shaped obstacles with– Point robot in field of configuration shapes
• All movement is:– Start to vertex, vertex to vertex, or vertex to goal
• Search: Start, vertices, goal, & connections
• A* search yields efficient least cost path

Online Search
• Offline search:– Think a lot, then act once
• Online search:– Think a little, act, look, think,..– Necessary for exploration, (semi)dynamic env– Components: Actions, step-cost, goal test– Compare cost to optimal if env known
• Competitive ratio (possibly infinite)

Online Search Agents
• Exploration:– Perform action in state -> record result– Search locally
• Why? DFS? BFS?• Backtracking requires reversibility
– Strategy: Hill-climb• Use memory: if stuck, try apparent best neighbor• Unexplored state: assume closest
– Encourages exploration

Lozano-perez, 2000
B&B + DynProg Analysis• Algorithm:
• Select best partial path from Q
• Test for completion
• Add path extensions to Q
Assume that we are using an Expanded “list” to implement Dynamic Prog. (implemented as a hash table – constant access time).
Paths taken from Q ?
Assume we have a graph with N nodes and L links. We call a graph where nodes have O(N) links are dense. Graphs where the nodes have a nearly constant number of links are sparse. For dense graphs L is O(N2).
O(N)
Cost of adding path extension to front of Q ?
O(L)
Total cost ? O(N2 + L)
Cost of picking path from Q (& cleanup), using linear scan? O(N)
Attempts to add path to Q (many are rejected)?O(1)
lozano-perez, 2000
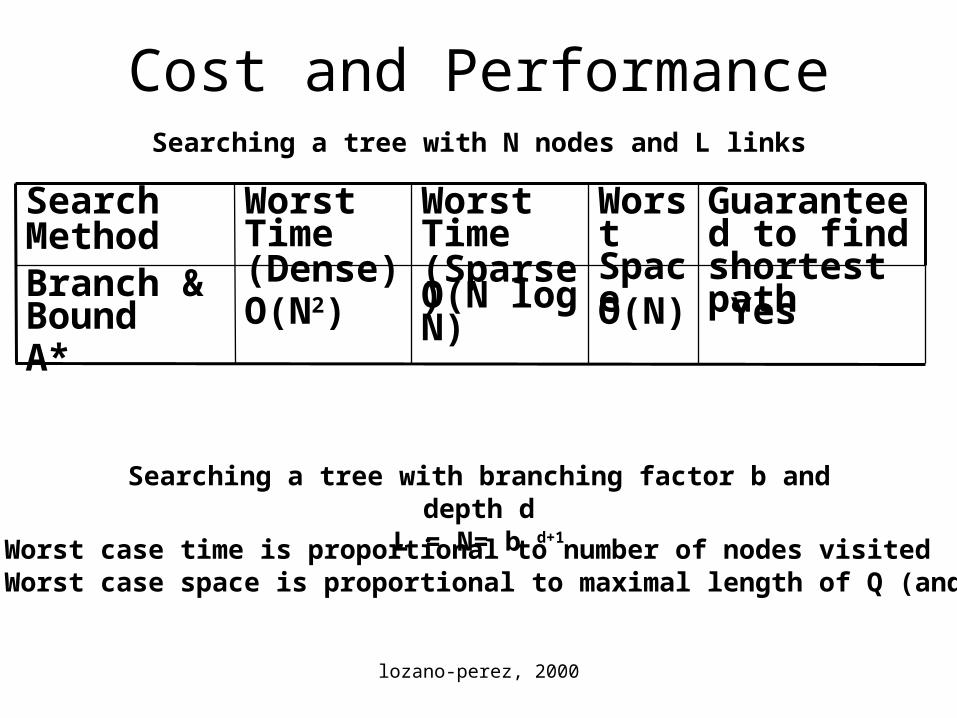
Cost and Performance
Searching a tree with branching factor b and depth dL = N= b d+1
Worst case time is proportional to number of nodes visitedWorst case space is proportional to maximal length of Q (and Expanded)
Searching a tree with N nodes and L links
Yes
Guaranteed to find shortest path
O(N)O(N log N)O(N2)Branch & BoundA*
Worst Space
Worst Time(Sparse)
Worst Time(Dense)
SearchMethod