science objectives & investigation methodology life in the atacama 2005 science & technology...
TRANSCRIPT

Science Objectives & Investigation Methodology
Life in the Atacama 2005Science & Technology WorkshopJanuary 6-7, 2005
Nathalie A. CabrolNASA Ames
Life in the Atacama 2005 Science/Technology Workshop
2 NASA Ames Research Center / Carnegie Mellon
Introduction
Topic: Science Objectives & Methods
Outline:• 2004
•The plan and what was accomplished•Pre-mission exploration strategies and post-field test adjustment for 2005
• 2005 Issues•Difference between targeted sampling and regional mapping?
•Ground-Truthing and Sampling• Info archival

Life in the Atacama 2005 Science/Technology Workshop
3 NASA Ames Research Center / Carnegie Mellon
Summary of Mission Goal: The Plan
Life in the Atacama 2005 Science/Technology Workshop
4 NASA Ames Research Center / Carnegie Mellon
Summary of Achievements (1)
• 41 locales listed; 24 unique locales investigated• Total science traverses:
• Site B: ~ 6 km -- to be confirmed by E.T (all manual)• Site C: ~ 23.5 km -- to be confirmed by E.T (13.9/12.5)
• Outstanding and first time demos for future missions (e.g., MSL and Sample Return):• During the same sol (014):
• Successful return to a locale (040) of high-science value;
• Return ~150 m to LS after one week of investigation. The original plan was to allow 2 sols to get back accurately to a site.

Life in the Atacama 2005 Science/Technology Workshop
5 NASA Ames Research Center / Carnegie Mellon
Summary of Achievements (2)
• ~ Longest science traverse during ops: ~1.2 km;
• 3.3 km autonomous traverse (post-science ops);
• 0% autonomy at Site B;
• 83% autonomy at Site C after the camera were working;
• Mean autonomy at Site C: 59%
• Overall autonomy (Site B + Site C): 47%

Life in the Atacama 2005 Science/Technology Workshop
6 NASA Ames Research Center / Carnegie Mellon
Summary of Achievements (3)
Site BScienceTraverse
(km)
AutonomousNavigation
(%)
LongestAutonomous
Segment(m)
Long-RangeMapping
Stops
TargetedSampling
Stops
RemoteSensingMeasur.
In situMeasur.
DataVolumeReceived
(MB)
Sol 01 0 0 80?Sol 02 0 0 454?Sol 03 0 0 151Sol 04 0 0 170Sol 05 0 0 46Sol 06 0 0 122Sol 07 0 0 49Total 0 0 1,072
Site CTotal
ScienceTraverse
(km)
RoverAutonomousNavigation
(%)
LongestAutonomous
Segment(m)
Long-RangeMapping
Stops
TargetedSampling
Stops
RemoteSensingMeasur.
In situMeasur.
DataVolumeReceived
(MB)
Sol 08 0 0 0 1 0 96Sol 09 1.6? 0 0 2 3 34Sol 10 1.6? 0 0 4 3 46Sol 11 3.5 0 0 3 2 56Sol 12 1.5 99 (1.5 km) 543 5 3 66Sol 13 6.2 66
(4.1 km)742 8 1 49
Sol 14 9.1 91 (13.9 km) 1,209 4 2 154Total 23.5 59
(13.9 km)2,494 27 14 501
N.A. Cabrol and D. Jonak
Life in the Atacama 2005 Science/Technology Workshop
7 NASA Ames Research Center / Carnegie Mellon
Summary of Achievements (4-1)

Life in the Atacama 2005 Science/Technology Workshop
8 NASA Ames Research Center / Carnegie Mellon
Summary of Achievements (4-2)
N. A. Cabrol and D. Jonak
Life in the Atacama 2005 Science/Technology Workshop
9 NASA Ames Research Center / Carnegie Mellon
Summary of Achievements (4-3)

Life in the Atacama 2005 Science/Technology Workshop
10 NASA Ames Research Center / Carnegie Mellon
Summary of Achievements (5)
Category Mission SuccessCriteria
Year 01 CampaignResults
Number of Samples 10 27Total Science Traverse N/A 2.3 km (60% aut.)
Category Mission SuccessCriteria
Year 02 CampaignResults20 Detailed16 Survey4 Plows
Number of Samples 10 Detailed100 Survey
Phase 1:11 Detailed9 Survey1 Plow
Phas e 2 :9 De taile d7 S urvey3 Plow
Total Sc ien c e Travers e N/A ~29.5 km (~ 47% aut)
Life in the Atacama 2005 Science/Technology Workshop
11 NASA Ames Research Center / Carnegie Mellon
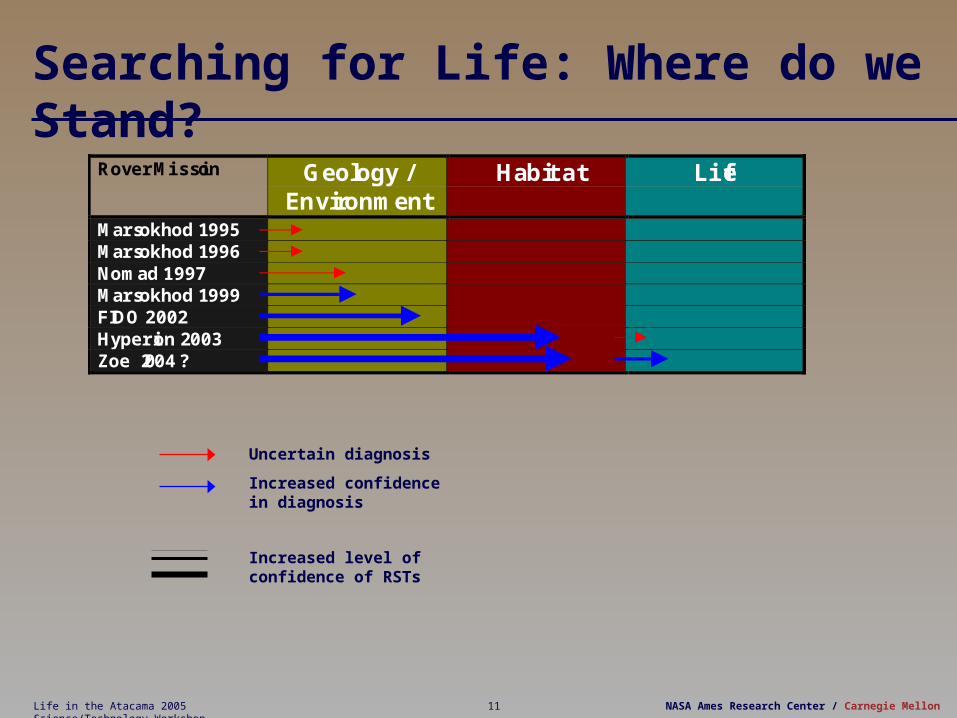
Searching for Life: Where do we Stand?
Rover Mission Geology /Environment
Habitat Life
Marsokhod 1995Marsokhod 1996Nomad 1997Marsokhod 1999FIDO 2002Hyperion 2003Zoe 2004 ?
Uncertain diagnosis
Increased confidence in diagnosis
Increased level of confidence of RSTs

Life in the Atacama 2005 Science/Technology Workshop
12 NASA Ames Research Center / Carnegie Mellon
Pre-Mission Exploration Strategy
• Regional Mapping: Along a traverse from A to B, rover stops every determined n-meters, deploys a set number of instruments and always acquire same type of data
• Targeted Sampling: Thorough investigation of science targets of interest identified in the scene.

Life in the Atacama 2005 Science/Technology Workshop
13 NASA Ames Research Center / Carnegie Mellon
Post-Mission Exploration Strategy Adjustments (1)
• The demonstration of the ability to go back accurately to a distant site of science interest with the rover is opening new possibilities in terms of robotic astrobiology investigation strategy. For the 05’ campaign, we suggest a new strategy that will provide the best of the two “worlds” of the current targeted sampling and regional mapping:
Tentative definitions:
• Regional Mapping Reconnaissance Survey
• Targeted Sampling Focused Investigation

Life in the Atacama 2005 Science/Technology Workshop
14 NASA Ames Research Center / Carnegie Mellon
Post-Mission Exploration Strategy Adjustments (2)
A B
RM
A
TS
RS
A B

Life in the Atacama 2005 Science/Technology Workshop
15 NASA Ames Research Center / Carnegie Mellon
Pros of the Reconnaissance Strategy:• Maximize the use of rover mobility to cover long-range fast; • Grasp quickly the main characteristics of an area;• Allow time for the S.T to “digest” the information, thus;• Decrease the chances of missing sites of high-science payoff;• Still allows to perform regional mapping;• Improve quality of samples and increase our ability to make educated conclusions
Post-Mission Exploration Strategy Adjustments (3) -- ADDED VALUE
Nathalie Cabrol:
Nathalie Cabrol:

Life in the Atacama 2005 Science/Technology Workshop
16 NASA Ames Research Center / Carnegie Mellon
•Requirement:• Robust demonstration of ability to go back to a
specific site:• Using way points, ground and satellite imagery; (this year demo)
• Develop technology that would allow the rover to follow its tracks back;
• Other methods?
Post-Mission Exploration Strategy Adjustments (4)

Life in the Atacama 2005 Science/Technology Workshop
17 NASA Ames Research Center / Carnegie Mellon
Issues to be discussed
• Difference between targeted sampling and regional mapping?
• Ground-Truthing and Sampling• Info archival• Other?
Life in the Atacama 2005 Science/Technology Workshop
18 NASA Ames Research Center / Carnegie Mellon
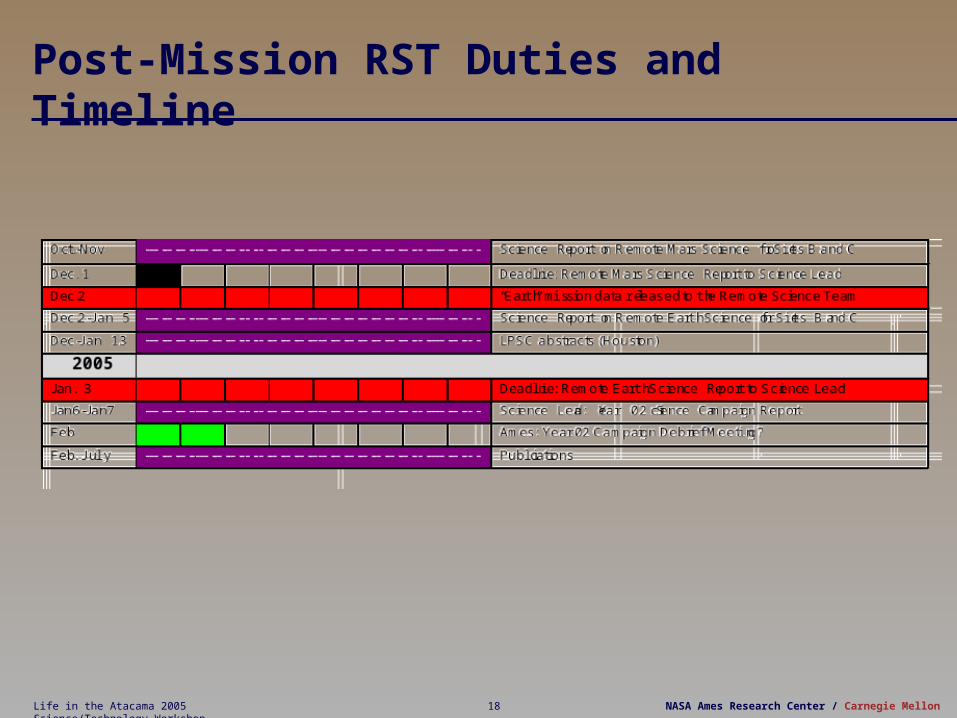
Post-Mission RST Duties and Timeline

Life in the Atacama 2005 Science/Technology Workshop
19 NASA Ames Research Center / Carnegie Mellon
04’ RFE LITA Science Publications
• 5 LPSC Abstracts (to be submitted 01/13)
• 11 projects of JGR papers about the 04’ Campaign + 2 papers from Mckay’s group (deadline for 1st drafts : 04/01/05)
• 1 Science report (in progress)
• Already accepted:
• Wettergreen et al., ICRA 2005 - First experiments in the robotic investigation of life in the Atacama desert of Chile.
• Other?