scene understanding without labels - university of … · s. m. ali eslami, nicolas heess,...
TRANSCRIPT

Scene Understanding Without Labels
S. M. Ali Eslami
February 2017

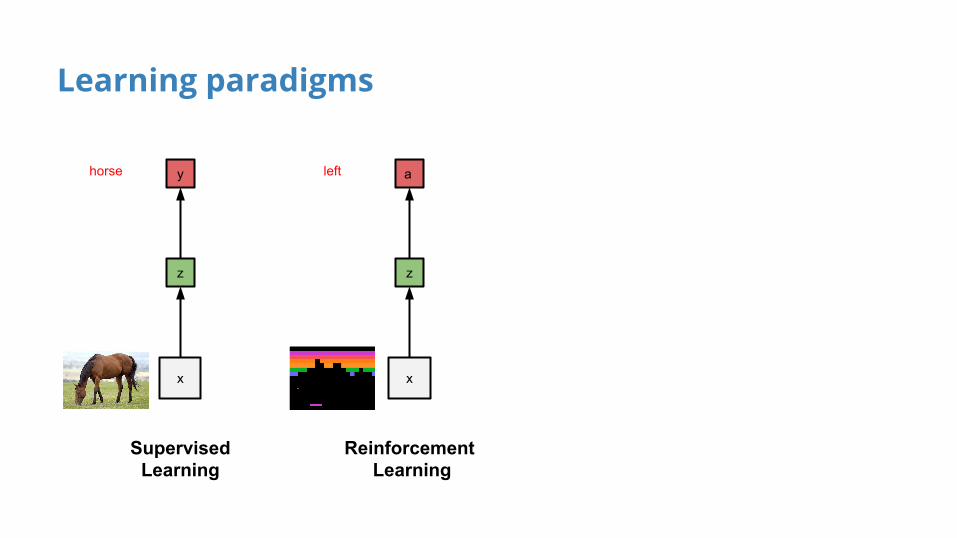
Learning paradigms
x
z
SupervisedLearning
yhorse
Learning paradigms
x
z
x
SupervisedLearning
Reinforcement Learning
y
z
ahorse left

Learning paradigms
Decoder
x
z
xx
z
x
SupervisedLearning
Reinforcement Learning
GenerativeModelling
y
z
a yhorse left

Learning paradigms
Decoder
x
z
xx
z
x
SupervisedLearning
Reinforcement Learning
GenerativeModelling
y
z
a y
(2.3, -1, 0.5, 3)
not blinkinghorse left
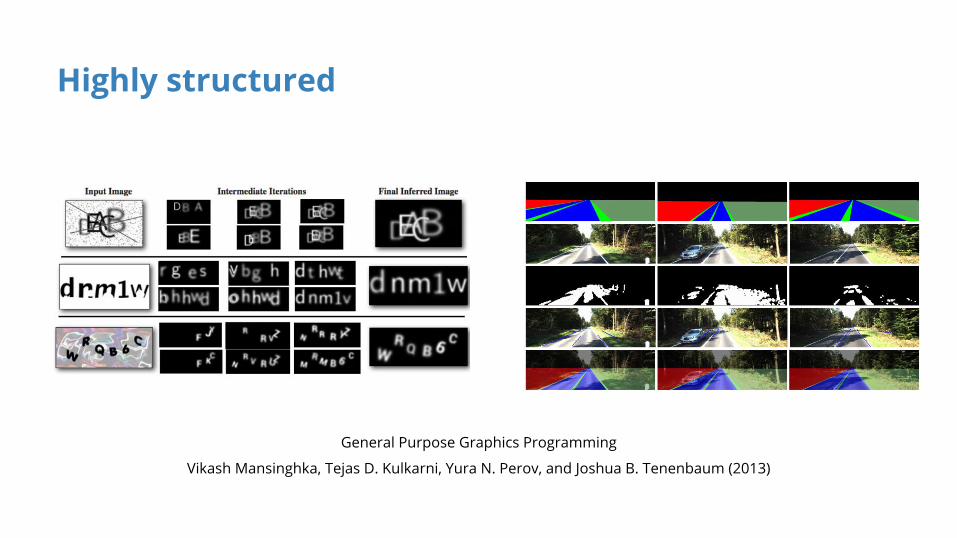
Highly structured
General Purpose Graphics Programming
Vikash Mansinghka, Tejas D. Kulkarni, Yura N. Perov, and Joshua B. Tenenbaum (2013)

Partially structured
A Stochastic Grammar of Images
Song-Chun Zhu and David Mumford (2007)

Partially structured
S. M. Ali Eslami and Christopher K. I. Williams (2012)

Fully unstructured
Geoffrey Hinton (2006) Antti Rasmus et al. (2016) Jeff Donahue et al. (2016)

Recurrent Neural Networksfor Image Generation
Karol Gregor, Ivo Danihelka, Alex Graves, Danilo Jimenez Rezende, Daan Wierstra (2015)
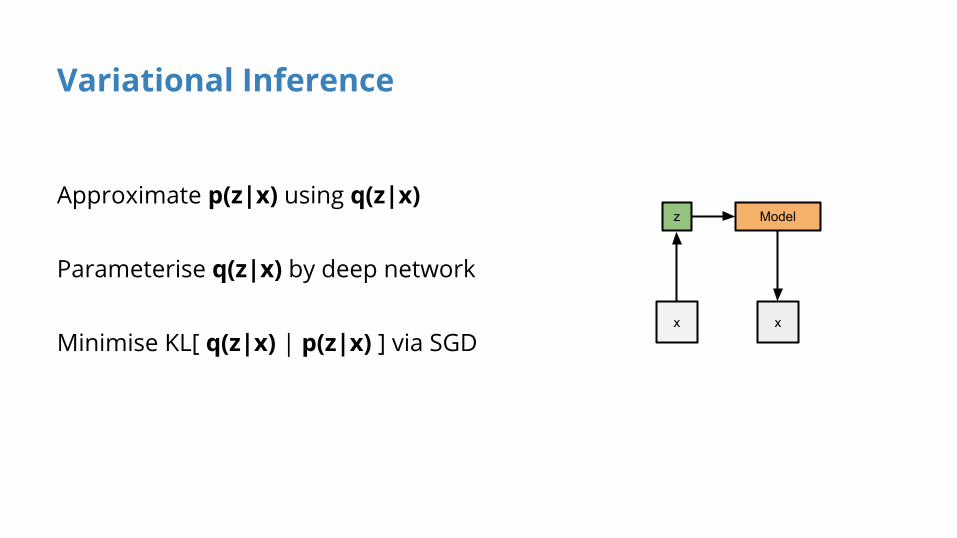
Variational Inference
Approximate p(z|x) using q(z|x)
Parameterise q(z|x) by deep network
Minimise KL[ q(z|x) | p(z|x) ] via SGD
Model
x
z
x

Recurrent Neural Networks for Image Generation
c
x
z
p(x|c)D
ecod
ing
Gen
erat
ion
Enc
odin
gIn
fere
nce
Hinton (2006)

Read Read
ct+2
x
Write
z
Recurrent Neural Networks for Image Generation
c
x
z
p(x|c)D
ecod
ing
Gen
erat
ion
Enc
odin
gIn
fere
nce
Write
Read
ct
x
ct+1
x
Write
p(x|cT)
z z
Gregor et al. (2015)Hinton (2006)

Recurrent Neural Networks for Image Generation

Recurrent Neural Networks for Image Generation

Towards Conceptual CompressionKarol Gregor, Frederic Besse, Danilo Rezende, Daan Wierstra (2016)

Read
ct+3
x
Write
z
Write
Read Read
ct+1
x
ct+2
x
Write
p(x|cT)
z z
Write
Read
ct+1
x
z

ct+3
Write
z
Write
Read
ct+1
x
ct+2
Write
p(x|cT)
z z
Write
Read
ct+1
x
z
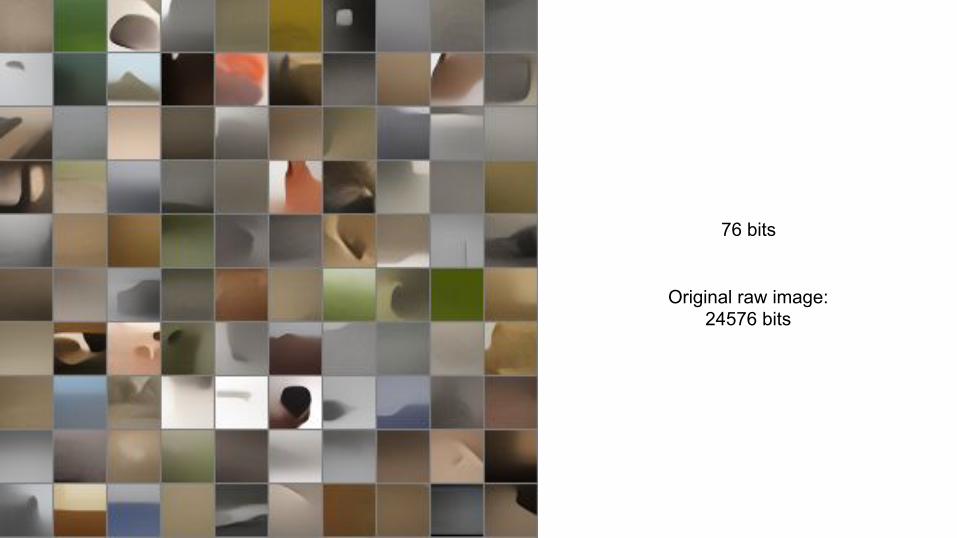
76 bits
Original raw image:24576 bits

112 bits

221 bits

380 bits

2364 bits

Attend, Infer, Repeat: Fast Scene Understanding with Generative Models
S. M. Ali Eslami, Nicolas Heess, Theophane Weber, Yuval Tassa, Koray Kavukcuoglu, Geoffrey Hinton (2016)

Attend, Infer, Repeat

x
z
blue brick
Mod
elIm
age
Cau
se

x
z
blue brick pile of bricks
x
z
Mod
elIm
age
Cau
se
not sufficient forgraspingcountingtransfergeneralisation

x
z
x
z1 z2
Mod
elIm
age
Cau
se
blue brick red brickpile of bricks

x
z
Mod
elIm
age
Cau
se
x
zwhat
y1
z1 zwherez1 zwhat
y2
z2 zwherez2
atty1
atty2
blue brick red brickpile of bricks blue brickabove
red brickbelow
x
z1 z2
Decoder
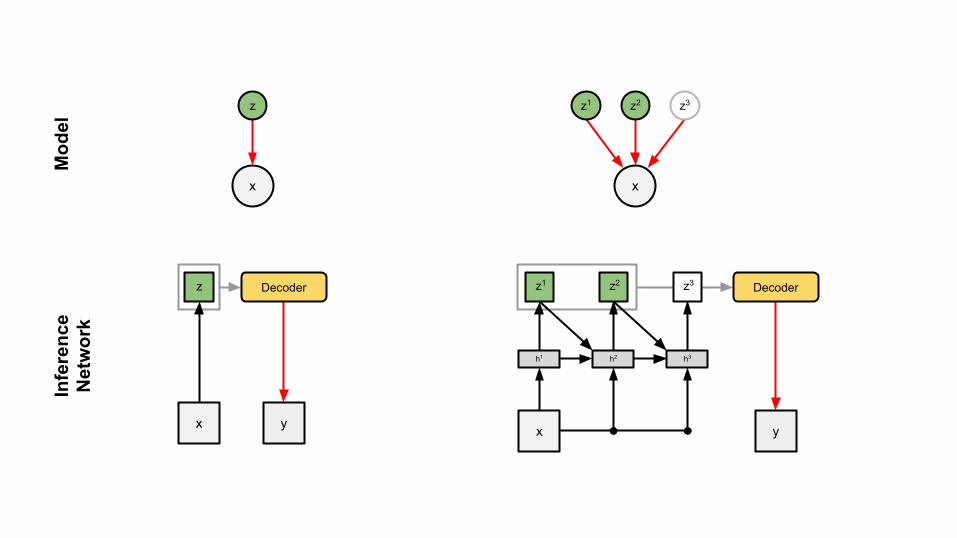
x y
z Decoder
x y
h1 h2 h3
z1 z2 z3
x
z
x
z1 z2 z3
Mod
elIn
fere
nce
Net
wor
k

Decoder
x y
h1 h2 h3
z1 z2 z3 Decoder
x y
h1 h2 h3
zpresz1 zpresz2 zpresz3zwhatz1 zwhatz2 zwhatz3zwherez1 zwherez2 zwherez3
x
zwhat
y1
z1 zwherez1 zwhat
y2
z2 zwherez2
atty1
atty2
Mod
elIn
fere
nce
Net
wor
k
x
z1 z2 z3

x y
zpres
zwhatxatt yatt
hi
zwhere...
VA
E
yi
i ii
i
i
... ...

Decoder
x y
h1 h2 h3
zpresz1 zpresz2 zpresz3zwhatz1 zwhatz2 zwhatz3zwherez1 zwherez2 zwherez3
x
zwhat
y1
z1 zwherez1 zwhat
y2
z2 zwherez2
atty1
atty21. Build in structure
Get out meaning
2. Inference networks that area. recurrentb. variable-lengthc. attentive
3. End-to-end learning througha. discrete, continuous varsb. inference and model nets
Recap: Key ideas


Omniglot

6
9
no
yes
Representational power
Sum? Increasing order?

Additional structure
x
z
distributed vector that correlates with blue brick
learned

x
z
Additional structure
x
z
distributed vector that correlates with blue brick
class=brickcolour=blueposition=Protation=R
learned
specified



Decoder
x y
h1 h2 h3
z1 z2 z3
x
z1 z2 z3
Additional structure
specified
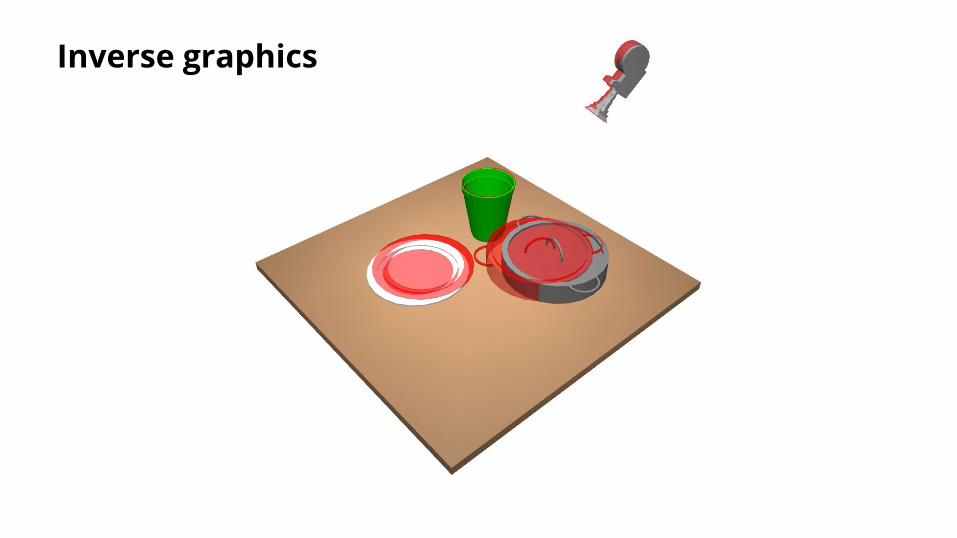
Inverse graphics


Policy learning
Tabl
e-to
pM
NIS
T

Unsupervised Learning of 3D Structure from Images
Danilo Rezende, S. M. Ali Eslami, Shakir Mohamed, Peter Battaglia, Max Jaderberg, Nicolas Heess (2016)

How to recover 3D structure from 2D images?To form stable representations, regardless of camera position
Motivation

How to recover 3D structure from 2D images?To form stable representations, regardless of camera position
● Inherently ill-posed○ All objects appear under self occlusion, infinite explanations○ Therefore build statistical models to know what’s likely and what’s not
● Even with models, inference is intractable○ Important to capture multi-modal explanations
● How are 3D scenes best represented?○ Meshes or voxels?
● Where is training data collected from?
Motivation

Unsupervised Learning of 3D Structure from Images

Unsupervised Learning of 3D Structure from Images

Projection operatorsUnsupervised Learning of 3D Structure from Images

Unsupervised Learning of 3D Structure from Images
Unconditional samples

Unsupervised Learning of 3D Structure from Images
Unconditional inference

Unsupervised Learning of 3D Structure from Images
Class-conditional samples

Unsupervised Learning of 3D Structure from Images
Multi-modality of inference

Unsupervised Learning of 3D Structure from Images
3D structure from multiple 2D images

Unsupervised Learning of 3D Structure from Images
Inferring object meshes

Unsupervised Learning of 3D Structure from Images
Inferring object meshes

● Deep Supervised Learning
● Deep Reinforcement Learning
● Model-based Methods
● Deep Variational Inference
● Structured / Unstructured Generative Models
Recap
