rykt af imm, dtu - technical university of denmark · rykt af imm, dtu. iii preface this m.sc. ......
TRANSCRIPT

AirlineCrewScheduling
DuringTracking
JesperHolm
LYNGBY
2002
MASTER
THESIS
NR.??/02
IM
M
TryktafIMM,DTU

iii
Preface
ThisM.Sc.thesisisthe�nalrequirementforobtainingthedegree:Master
ofScienceinEngineering.Theworkhasbeencarriedoutintheperiodfrom
1stofSeptember2001to28thofFebruary2002attheOperationsResearch
sectionatInformaticsandMathematicalModeling,TechnicalUniversityof
Denmark.TheworkhasbeensupervisedbyProfessorJensClausen.
ThethesishasbeencarriedoutincollaborationwithScandinavianIT
GroupwhereKim
Milvang-JensenandStevenLaursenhavebeenmucol-
laborators.
Lyngby,February28th,2002
JesperHolm
c961050
i

v
Abstract
Thisthesisinvestigatesairlinecrewscheduling,whichcoverstheproblem
ofassigningcrewtoplanneddepartures.Theproblemisoftensubdivided
intoseveralphases:Thepairingphase,theassignmentphase,thetracking
phaseandtheday-to-dayphase.Inthisthesis,thetrackingphasehasbeen
themainfocus.Anexistingsystem
developedbyScandinavianITGroup
hasbeenusedasastartingpointforthedevelopedsoftware.
Thepropertiesofthetrackingphasemakeitdesirabletoconstructindi-
vidualworkshiftsforeachcrew.Thisapproachisincontrasttotheusual
approachestakenduringtheassignmentandpairingphases.Hence,asetof
individualworkshiftsisconstructedforeachcrewtobeconsidered.From
eachset,aworkshiftforeachcrewtomanischosenusingaSetCovering
formulation.
Theconstructionofworkshiftsisdonebyenumeratingasubsetofall
possibleworkshiftsbyusingheuristicsorbyusinganexistinggenerator
developedbyScandinavianITGroup.TheresultingSetCoveringProblem
issolvedusingSimulatedAnnealing.
A
totalof16�real-life�problemsareconsidered.Thesmallestcontains
slightlymorethan200crewand150open�ightsandthelargestcontains
justabove600crewand900open�ights.Usingthedevelopedheuristics
around90%
oftheplanneddepartureswerecovered.Incomparison,the
existingheuristicresultedinacoveragearound60%.
KeywordsAirlinecrewscheduling,SimulatedAnnealing,Combinatorial
Optimization,Heuristics.
v
Contents
1
Introduction
1.1
Terminology...........................
1.2
Phasesofairlinecrewscheduling
...............
1.3
Reportorganization
......................
2
Problem
description
2.1
Projectbackground.......................
3
Literaturereview
3.1
Pairingandassignment
....................
3.2
Tracking.............................
1
3.3
Day-to-day
...........................
1
4
Trackingphaseatsa
s
1
4.1
tap-ai..............................
1
4.1.1
Initialpairing......................
1
4.1.2
Reordering
.......................
1
4.1.3
Mainpairing
......................
1
4.2
Theprosandconsoftap-ai
.................
2

CONTENTS
vii
5
SolutionApproach
24
5.1
Pairinggeneration
.......................
25
5.1.1
Resources........................
25
5.1.2
Pairings.........................
26
5.1.3
Depth�rstsearch
...................
26
5.1.4
Depth-best�rstsearch.................
31
5.1.5
Pairingcost.......................
31
5.1.6
Searchingfromthe�middleandout�.........
34
5.1.7
Preprocessingoftheopen�ights...........
34
5.2
Pairingselection
........................
35
5.2.1
Solvingthesetcoveringproblem
...........
37
6
Implementation
41
6.1
Programdesign.........................
42
6.2
Memoryconsumption
.....................
43
7
Results
44
7.1
Data...............................
44
7.2
Modelparameters
.......................
49
7.2.1
ParametersinSimulatedAnnealing..........
50
7.2.2
Ghostcrewcost.....................
56
7.2.3
Pairingcostweights
..................
59
7.2.4
Boundingthedepth�rstsearch............
67
7.2.5
Searchfrontlengthfordepth-best�rstsearch
....
70
7.3
Performancetests........................
73
7.3.1
Searchingfrom�middleandout�...........
74
7.3.2
dfsversusdbfs
....................
74
7.3.3
dbfsversussig1
....................
77
7.4
Preprocessing..........................
81
CONTENTS
vi
8
Conclusion
8
8.1
Outlook
.............................
8
Bibliography
9

1
Chapter1
Introduction
Airlinecrew
schedulingistheproblem
ofassigningpersonnel(crew)to
planneddepartures.Becausecrewcostmakeuponeofthelargestdirect
expenseswhenoperatinganairlinecompany,optimizingcrewutilization
mayresultinhugegains.Thustheareaofcrewschedulingisimportant.
Unfortunately,obtaininggoodsolutionstotheairlinecrewschedulingprob-
lem
ishard.Firstofallbecausetheproblem
iscombinatorialinnature;
thereareahugenumberofwaysonecanmanthehundredsofdepartures
anairlinecompanyserveperday.However,theproblem
isnotrestricted
toasingledayandofteneverythingbetweenacoupleofdaysandupto
amonthhastobeconsidered.Ontopofthisalargesetofrulesgivenby
theaviationauthoritiesandunionagreementshastoberespected.Just
checkingthelegalityofagivensolutionisdi�cultandcomputationally
expensive.
ThisprojecthasbeencarriedoutincollaborationwithScandinavianAirline
Systems(sas).Forfurtherdetailsseesection2.1.
Belowanintroductiontotheterminologyusedinthe�eldofairlinecrew
schedulingwillbepresented.Followedbyamorein-depthintroductionto
airlinecrewscheduling.Finallyanoverviewoftherestofthereportis
given.
1.1
Terminology
1.1
Terminology
Inordertobeabletogiveamorespeci�cproblemformulationanintroduc
tiontosomeofthespecializedterminologyusedinairlinecrewschedulin
willbepresentedbelow.
Crew
Acrewisasingleperson.Therearetwomaintypesofcrew:Cabi
(servicingthepassengers)andcockpit(steeringtheaircraft).Inthi
projectonlycabincrewareconsideredandhencecrewwillbeuse
asansynonym
forcabincrew.Howevertheideasandmethoduse
shouldbeeasytoapplytocockpitcrewaswell.
BaseAbaseisanairport.Ahomebaseisthebasewhereacrew�belongs�
Forsasthisisoneofthefollowing:Copenhagen(CPH),Stockholm
(ARN),andOslo(OSL).
ConnectiontimeTheperiodoftimebetweenacrewarrivesatabas
withone�ightanddepartwithanother.
PairingA
pairingisaworkshiftforasinglecrew.On�gure1.1th
structureofapairingisshown.A
pairingstartsandendsonth
samebase(onthe�gureCPH).Apairingisconstructedfrom
oneo
moredutyperiodswhichareseriesof�ights(alsoknownaslegs)wit
asmallconnectiontime.Theperiodoftimebetweentwolegsin
dutyperiodiscalledasit.Eachdutyperiodstartswithabrie�ngan
terminateswithadebrie�ng.Whentheconnectiontimebetweentw
legsislargeitiscalledastop,whichseparatesdutyperiods.Pairing
mightalsobereferredtoasrostersorslings(thelatteronlyusedb
sas).
Open�ightOpen�ightisusedtodenoteseveralslightlydi�erentthings
Firstofallanopen�ightisa�ightwhichlacksoneormorecrew
Butoneopen�ightisalsousedtodenotethatonecrewismissin
ona�ight.Thismeansthatifa�ightislackingtwocrewthis�igh
representstwoopen�ights;oneforeachcrew.
Passivetransferisalsoknownasdeadheading.Acrewissaidtobeon
passivetransferwhensheisassignedtoa�ightthatisnotinlacko
crew.Thisisdonetotransportherfromonebasetoanother,eithe
becausesheisneededatthearrivingbaseortoreturnhertohe
homebase.
Standby
alsoknownasreservecrewisacrewthatcanbecalledonwor
witharelativeshorttimeofnotice(oftenacrewhastobeathe
homebasewithinanhour).

1.2 Phases of airline crew scheduling 3
Legality A pairing is said to be legal if it complies with the set of rules
given by the aviation authorities as well as union agreements. This
set has to be satis�ed by all pairings.
LegBrief Sits Leg Debrief
CPH ARN ARN OSL
Stop Brief Leg Debrief
CPHOSL
Duty periodDuty period
Pairing/roster/sling
Figure 1.1: The building blocks of a pairing.
1.2 Phases of airline crew scheduling
Due to the di�culties of airline crew scheduling the solution is traditionally
divided into a number of phases. On �gure 1.2 these phases are sketched.
The �rst phase consist of longterm planning where the destinations to serve
and the type of service (number of �ights per day) are determined. This
results in the set of all �ights to �y.
0
Assignment
Pairing
release
Schedule
days
Planning
Tracking
Day−to−day
−14−32 −1
Figure 1.2: Phases of airline crew scheduling.
1.3 Report organization
The aim of the next phase, the pairing, is to generate pairings from th
planned �ights from the planning phase. The objective is to include eac
planned �ight exactly once in the generated pairings.
When pairings have been constructed individual crews are assigned to th
generated pairings in the assignment phase. This step ends with a schedul
which gives the relation between crews and �ights; showing the �ights an
the crews that are to man them. At this point the schedule is released, s
each crew gets to see the �ights she is to man.
The released schedule is not complete, as not all �ights are assigned th
number of crews which are needed. In other words the released schedul
most likely contains open �ights. Some of the open �ights in the schedul
are inherited from the previous phase. Others emerges during the trackin
phase due to new passenger forecasts1 and illness. The objective of th
tracking phase is to assign crew to these open �ights.
Finally, on the day of operation, the schedule is executed in the day-to-da
phase. Remaining open �ights, new which arise, delays etc. are dealt wit
possibly by cancellation.
1.3 Report organization
Problem description This chapter gives a more precise description o
the problem targeted in the project along with a description of th
project background.
Tracking phase at sas This chapter describes an existing approach fo
solving the problems of airline crew scheduling during the trackin
phase, used by sas.
Solution approach This chapter describes the approach taken in thi
project for solving the problem.
Implementation Here an overview of the implementation is given.
Results This chapter presents the numerical result obtained along wit
a comparison with results obtained with the program currently use
by sas.
1The number of crew needed on a �ight is determined by the type of �ight and th
estimated number of passengers.

5
Chapter2
Problem
description
Theproblemconsideredinthisprojectiscrewschedulingduringthetrack-
ingphase.Asdescribedinsection1.2aschedulehasalreadybeencon-
structedwhenenteringthetrackingphase.However,open�ightsarestill
aroundduringthetrackingphaseandtheproblemistoassigncrewtothese
�ights.Tobeabletosolvethisproblemtherehastobecrewavailablethat
canbeassignedtotheopen�ights.Therefore,di�erentkindsofstandby
timeareallocatedinthescheduleduringtheassignmentphase,whichcan
thenbeusedduringthetrackingandday-to-dayphases.
Agraphicalpresentationoftheproblem
isgivenon�gure2.1.On�gure
2.1(a)anopen�ightorientedviewofthescheduleisgiven�simplyshowing
theopen�ights.Noticethatopen�ightsCandDoriginatesfromthesame
�physical��ightbetweenCopenhagenandLondonwhichlackstwocrew
members.Thisshowsupinthescheduleastwodi�erentopen�ights.
On�gure2.1(b)thescheduleisshownfromacrewpointofviewwhichfor
eachcrewgivesthedi�erentactivitiesthatshehasbeenassigned.Duty
timeistimewhereacrewhasalreadybeenassignedto�ights;sheiswork-
ing.Standbyistimewherecrewcanbecalledonworkwitharelatively
shortnotice(oftenwithinanhour).Othertypesofstandbyareblank-days
andusable-time.Thedi�erenceslieinthespeci�crulesforhowandwhen
theycanbeusedtocloseopen�ights.Sparetimeisthetimewherecrewis
o�workandthereforecannotwork.Finallythereare�holes�inschedule
wherecrewisnotassignedtoaspeci�cactivity.Crew3hasaholeinher
2.1
Projectbackground
CPH
OSL
OSL
ARN
CPH
LHR
CPH
LHR
LHR
CPH
ABCD
Now
Time
EOpen flight
(a)Open�ightorientedviewofschedule
CPH
OSL
OSL
CPH
LHR
OSL
CPHARN
CPH
OSL
CPH
ARN
Cre
w
124 3
Dut
y
Spa
retim
e
Sta
ndby
Usa
ble−
tim No
Bla
nk−
days
(b)Creworientedviewofschedu
Figure2.1:Asamplescheduleshowingopen�ights(left)andcrewschedul
(right).
scheduleafterreturningtoCopenhagenfrom
Oslo.Holesmightbeuse
whenclosingopen�ights.
Allinone,standby,blank-days,usable-timeandholesinschedulearere
ferredtoasresourceperiods;timeinschedulewherecrewmightbeuse
tocloseopen�ights.Thisgivesthefollowingproblemstatement:
Closeasmanyopen�ightsaspossibleusingtheresourceperiods
allocatedinthescheduleascheaplyaspossible,withrespectto
somecostmeasure.
Ontopofthisacreworientedapproachshouldbetestedwhensolvingth
problem.Thismeansthatinformationaboutthecrewthatistoman
pairingshouldbesoughtusedwhenthepairingisgenerated.Thisisi
contrasttotheapproachdescribedabovewherepairingsaregeneratedi
thepairingphaseandassignedintheassignmentphase.
2.1
Projectbackground
TheprojecthasbeenmadeinacollaborationbetweenInformaticsan
MathematicalModelling(imm),TechnicalUniversityofDenmarkandScan
dinavianIT
Group(sig)thelatterbeing100%
ownedbyScandinavia
AirlineSystem(sas).
sighasdevelopedasystemcalledtap-aithatpriorto1998wassuccessfull
usedtosolvetheschedulingproblemduringthetrackingphase.However

2.1
Projectbackground
7
duetotheintroductionofnewunionrulestheheuristicsdeployedbytap-
aihasbecomeinvalid.From
1998andonwardsthetrackingphasehas
thereforebeendealtwithmanually.However,thecombinatorialnatureof
theproblemindicatesthatanOR-approachmightleadtonotablesavings.
tap-aihasapairinggenerationpartthathasbeensoughtusedtogenerate
pairingsofopen�ightswhichthencouldbeusedbythesta�.However,
sincenoinformationabouttheavailableresourcesinscheduleisusedit
isnotguaranteedthatthegeneratedpairingscanbeassignedtoacrew.
Practicesshowsthattheslingsgeneratedbytap-aioftendonot�twith
theresourcesinscheduleandtap-aiisnotcurrentlyusedbythesta�.
Chapter3
Literaturereview
Currently,therehasbeenmuchworkcarriedouttargetingthepairing
assignmentandday-to-dayphases.Butalmostno(published)workha
beendonedirectlytargetingthetrackingphase.Ithasonlybeenpossiblet
�ndonepaper[13]whichdealsdirectlywiththisphase.Butthetechnique
andideasusedinthepairing,assignmentandday-to-dayphasesarea
usablewhenconsideringschedulingduringtracking.
Theliteraturecanroughlybedividedinto3classes:Thosethatdealwit
thepairingandassignmentphases,theonethatdealswithtrackingan
thosethattrytosolveday-to-dayproblems.
3.1
Pairingandassignment
Theseproblemshavebeentargetedintwomainways;astwoseparate
problemsandasone.InbothcasesavariationoftheSetPartitionin
Problemisusedtoperformsomekindofselectionamongpairings:

3.1
Pairingandassignment
9
Minimize
Z=
n X j=1
c jxj
(3.1)
Subjectto
n X j=1
aijxj=1;
fori=1;:::;m
(3.2)
xjinteger;
forj=1;:::;n
(3.3)
aij
arisesfrom
amatrixA
whereeachrow
correspondstoa�ightand
eachcolumntoapairing.xj
denotesifpairing(column)jischosen,the
correspondingcostisc j.(3.2)ensuresthateach�ightisincludedexactly
onceinthesetofchosenpairings.Alternatively,asetcoveringmodelmight
bechosenwheretheequalsignin(3.2)isreplacedbyagreater-than-or-
equalsign.Theneach�ightiscoveredatleastoncebythechosenpairings.
BothmodelsareknowntobeNP-hard.However,afeasiblesolutiontothe
SetCoveringProblem
caneasilybefoundgivenitexist:Justincludeall
columnsinthesolution.Thisapproachcanobviouslynotbeusedwhen
dealingwiththeSetPartitioningProblembecauseofovercoverageofrows
isnotallowed.ThismakestheSetCoveringProblem
muchnicertowork
with.However,sinceovercoverageofrowsisallowedonemightgetmultiple
coverageof�ightsintheSetCoveringProblemformulation.
AnothercommonelementisagraphG
whichrepresentspossiblepairings.
Eachpathinthegraphrepresentsa(legal)pairingwhichthenagaincorre-
spondstoacolumninA.Somekindofcostorrestrictionisoftenintroduced
inG.
In[8]ageneticorevolutionaryalgorithm[12]isdevelopedthatsolvesthe
SetPartitioningProblemarisingfromcrewschedulingasdescribedabove.
Neitherpairingconstructionnortheassignmentofpairingstocrew
are
considered.
In[14]insteadofusingindividual�ightlegsasbuildingblocks,asetofduty
periods(see�gure1.1)isconstructed.Thesedutyperiodsarethenselected
inaSetCoveringProblemsothatasetofdutyperiodscoveringthe�ight
legsisobtained.Theselecteddutyperiodsareorganizedinagraphwhere
pathscorrespondtopairings.Theproblemissolvedbycolumngeneration
whereashortestpathalgorithmisusedonthegraphtogeneratecolumns
3.2
Tracking
1
toamasterproblem.ThisagainisaSetPartitioningProblem
withrow
representingtheselecteddutyperiodsandcolumnsrepresentingpairings
Averysimpleformoflegalityissoughtenforcedonthegeneratedpairing
throughthegraphrepresentation.Theinitialconstructionofdutyperiod
isnotconsidered,noristheassignmenttocrew.
In[4,6]agraphisconstructeddirectlyfrom
the�ightlegsandusedt
enumeratepossiblepairings.In[6]thepairingsareconstructedoncean
thenaSetPartitioningProblemissolved.In[4]agraphGk
isconstructe
foreachcrewkandapathinGk
nowrepresentsalegalpairingforcrewk
Ashortestpathproblemonthesegraphsareusedasthesubproblemin
columngenerationscheme.Themasterproblem
�again�becomesaSe
PartitioningProblem.Becauseapairingalwayshasacrewassociatedth
assignmentproblem
isalsosolved.Gk
isconstructedbyenumeratinga
possibleandlegalpairingsforcrewk.
[3]formulatesamathematicalmodelthatgivenasetofpairingPk
fo
eachcrewkselectsexactlyonepairingfromeachsetPk
sothatall�ight
arecoveredexactlyonce.Thismodelissolvedusingabranch-and-boun
technique.
In[9]aSimulatedAnnealingapproachistakentosolvetheassignmen
problem
(itisassumedthatasetofpairingsisgiven).Firstly,aninitia
assignmentofcrewtopairingsismadeusingsomeheuristic.Theneigh
bourhoodisde�nedbyeithermovingonepairingfromonecrewtoanothe
orbyswappingtwopairingsbetweentwocrew.
3.2
Tracking
Asmentionedabove,theonlypaperfounddealingdirectlywiththetrackin
phaseis[13].Firstly,itseparatestheintroducedphasesofairlinecrew
schedulingintotwometaphases;aplanningphaseandanoperationa
phase.Thisisoutlinedon�gure3.1.

3.3 Day-to-day 11
0 days
Planning Operation
PlanningPairing
Assignment
Tracking
Day−to−day
−32 −14 −1
Figure 3.1: The division of phases of crew scheduling into to
meta phases: The planning phase and the operational phase.
[13] de�nes the operational airline crew scheduling problem as that of �mod-
ifying individual monthly work schedules for airline crew members during
the operational phase of the planned schedule�.
The approach taken is column generation. The master problem is modelled
as a Set Partitioning Problem over the open �ights. The subproblem gen-
erates columns corresponding to pairings. The subproblem is formulated
as a shortest path problem on a duty graph Gk for each crew k. Each path
in the graph corresponds to a legal pairing. The cost associated with each
path in the Gk corresponds to the marginal cost of the new pairing in the
master problem.
The speci�c problem considered in this paper was that of cockpit crew.
3.3 Day-to-day
The day-to-day problem is also referred to as airline irregular operations
[15] or crew recovery [7], because it consists of targeting those problem that
arise due to disruption from maintenance problems, bad weather conditions
etc.
In [15] depth �rst search in a branch-and-bound tree is used to assign crew
to �ights that have become open due to disruption. The branch is done on
the assignment of a crew to an open �ight.
In [7] a graph Gk representing pairings is build for each crew k as an
extension of the already �own pairings by k. This is then used in a set
3.3 Day-to-day 1
covering formulation which ensures that each open �ight is covered at leas
once.

13
Chapter 4
Tracking phase at sas
This chapter describes the solution approach used currently by sas when
dealing with the tracking phase.
sas uses a program called tap-ai, based on self developed heuristics (which
will be described below) to close open �ights during the tracking phase.
Before 1998 tap-ai was able to e�ciently close open �ights. This was done
using reordering (from Danish �omdisponering�), which basically swaps
pairings in and out of the schedule, possibly changing already planned duty
(a more detailed description follows). But in 1998 a new union agreement
heavily limited the possibilities of changing planned duty time during the
tracking phase. Hence, the usefulness of this approach was limited.
tap-ai consists of two main parts: One that does the reordering, and one,
that generates pairings from the initial set of open �ights. To overcome the
di�culties of the new union agreement sig took the approach of letting tap-
ai generate pairings which could then be assigned to crew using allocated
resources in schedule (such as standby, blank-days, usable-time and �holes�)
instead of changing already planned duty � which was the case when using
reordering. Thus mirroring the pairing and assignment phases from �gure
1.2. The assignment is done manually.
In the following a more in-depth description of tap-ai will be given.
4.1 tap-ai 1
4.1 tap-ai
The pairing generation part approach of tap-ai can be divided into tw
steps; an initial pairing generation, which was the generator used befor
1998, and the (main) pairing generation. The latter which has been buil
on top of the initial pairing generation after 1998.
Both the pairing generation and the reordering parts of tap-ai uses th
initial pairing generation to build an initial set of pairings from the give
set of open �ights. Firstly, a description of this initial pairing is given
Secondly, a closer look will be taken at the reordering approach used prior t
1998, and thirdly, the main pairing generation used to day will be described
4.1.1 Initial pairing
The initial pairing uses two lists, which are sketched on �gure 4.1 All ope
�ights are kept in a list L1, which is sorted accordingly to increasing de
parture time. L1 is traversed several times with di�erent heuristics tryin
to construct pairings. All the heuristics are greedy in the sense that the
start at the head of L1 and add the �rst �ight to the pairing currentl
under construction, which ful�ll some requirements given by the heuristic
Each time a pairing is successfully constructed it is stored in L2 and th
�ights which make up the pairing are marked as used in L1 (illustrate
with crosses on the �gure). As several heuristics will be tried in turn onl
�ights not marked as used will be considered when trying to construct
pairing.
L2: Pairings of open flights
L1: Open flights
A B C E G HD F
C HF B G
Figure 4.1: The 2 lists used when tap-ai does the initial pairing
on the open �ights.

4.1 tap-ai 15
As described, the initial pairing consist of a number of heuristics. They can
be divided into two main categories: A preprocessing (enforcing some rules)
and a number of heuristics which constructs pairings. The two categories
will be described next.
Preprocessing
First, a small amount of preprocessing is applied. This forces �ights to be
connected and locked1 if the �50 minute� rule2 apply. Similar the �trivsel
stop� rule3 is checked, and �ights that are required to be connected will be
connected and locked.
Heuristics
Next the following heuristics, which tries to build pairings from the �ights
in L1 are applied. The heuristics are tried successively in the order they
are listed.
The �rst heuristic tries to construct a pairing starting from a homebase X,
with one or more stops with good connection time (less than 3 hours) at
non-homebases (here a and b) and returning to X. This is illustrated on
�gure 4.2.
<3h <3h
X a a b b X
Figure 4.2: Pairing with good connection time ending and start-
ing at a homebase X.
The second heuristic relaxes the requirement on the connection time; now
connection times up to 30 hours for the leg returning to the homebase
1Pairings can be locked so they will not be changed at any point in the future.
2The rule states that if the captain or the pilot, for a given leg, have less than 50
minutes connection time to the next leg, they should be captain and pilot on that next
leg.3Trivsel stop rule forces �ights together in pairings that will keep crew �happy�.
4.1 tap-ai 1
are accepted. Hence, the requirement becomes < 30h at �gure 4.2 for th
connection time at base b.
The third heuristic tries to build a pairing consisting of exactly two �ights
with a good connection time and start and end at the same homebase X
This is illustrated at �gure 4.3.<3h
X a a X
Figure 4.3: Pairing with exactly 2 legs, good connection time
and start and end at a homebase X.
The fourth heuristic relaxes the requirement of good connection time, henc
a connection time of up to 26.6 hours is accepted (see �gure 4.4(a)). How
ever, there are two exceptions illustrated in �gure 4.4(b) and �gure 4.4(c)
A �ight creating more than 3 hours connection time on a homebase Y is no
accepted, if the previous base c or the next base e are a homebases (illus
trated at �gure 4.4(b)). A long stop (more than 3 hours) is not accepte
on a base d (see �gure 4.4(c)) if it is possible to insert two passive transfer
(dotted lines) forming two new balanced pairings. The two passive trans
fers may only have 5 hours of connection time and should not overlap wit
more than 2 hours.

4.1 tap-ai 17
X a a b b X
<26.7h<26.7h
(a) Pairing with at most 26.6 hours con-
nection time with start and end at a home-
base X.
c Y Y e
>3h
(b) Connection time >
3 hours on homebase Y
and c or e also homebase.
c d d
<5h
e d e
<2h
<5h
d
c
(c) Inserting 2 passive �ights, forming 2 new
pairings, with at most 5 hours connection time
and no more than 2 hours of overlap.
Figure 4.4: Relaxation on connection time (a), with 2 exceptions (b) and
(c).
The �fth heuristic relaxes the requirement from �gure 4.4 where the pairing
should start and end at the same homebase. Hence, the pairing should start
and end on a homebase, but not necessarily the same.
The sixth heuristic is a variant of �gure 4.2. It tries to connect a �ight,
which starts on a homebase X, with one or more �ights with good connection
time. But now an ending on a base (even a non-homebase) di�erent from
the stating base X is accepted.
The seventh heuristic tries to build pairings starting from any base, with
good connection time, ending on a homebase (see �gure 4.5). A possible
bad connection time of up to 24 hours is accepted on the leg arriving on
the homebase, with the exception illustrated on �gure 4.4(c).
4.1 tap-ai 1
a b b c c Xd d
<24h<3h <3h
Figure 4.5: Pairing starting from any base with good connection
time and ending on a homebase with possible bad connection
time.
The eighth heuristic tries to construct a pairing starting on a homebase
with three or more �ights with good connection time (< 3 hours) and endin
on any base.
The ninth heuristic tries to construct pairings consisting of two �ights start
ing at any base a, with good connection time, and ending at base a (se
�gure 4.6).
a b b a
<3h
Figure 4.6: Pairing starting and ending at base a with good
connection time at b.
As a �nal processing all remaining unmarked legs in L1 from �gure 4.1 ar
converted into pairings consisting of one �ight, and are inserted into L2.
4.1.2 Reordering
The reordering approach was developed based on interviews with the sta
who prior to tap-ai solved the scheduling problems during the trackin
phase manually. The goal was to develop a system which mirrored th
heuristics that the sta� consciously or unconsciously would use. An in
depth description of reordering is given in [11]. Below a rough outline o
the ideas used in reordering will be given.
Reordering is a process where pairings are swapped in and out of crew
schedule using some heuristics. The process can be described as a loca

4.1 tap-ai 19
search heuristics that tries to transform a current schedule by swapping
pairings (of open �ights) into the schedule (possible) replacing other pair-
ings which then become open �ights. The hope is, that if the pairings that
are swapped into the schedule, are always �harder to cover� than the ones
they are replacing, the set of open pairings can, at some point in time, be
inserted into the schedule without replacing any other pairings.
To be able to use the above sketched local search a de�nition of �hard
to cover� and �easy to cover� pairings/�ights has to be introduced. The
following characteristics are considered:
Length Several short pairings are considered easier to cover than one long.
The hope is that small pairings can be more easily �tted into the
schedule than long ones.
Destination Flights between the three homebases are considered easy to
cover. This is natural since a huge number of personal are transported
with passive �ights between the homebases and they can be used to
cover �ights.
Departure time Pairings which are closer to operation are considered
more important to cover than pairings which are far from operation.
If it is not possible to get all open pairings closed, the set of remaining
open pairings (after the reordering process is terminated) should hopefully
be easier to cover than the initial set. Due to the last preference listed
(departure time) some important time has been achieved because open
�ights are moved forward in time.
4.1.3 Main pairing
The aim of the main pairing (in the following just referred to as pairing)
process is to produce pairings which can be covered with the resources
allocated in crew schedules. The pairings produced by the initial pairing are
optimized towards reordering of crew schedules, because it was originally
build to produce the initial set of pairings from the set of open �ights used
in the reordering part of tap-ai (as described above). Pairings used in the
reordering step are (in general) shorter than the available resources in crew
schedules. Therefore some further pairing is introduced to optimize the use
of resources.
The pairing process can run in one of two modes. In mode 1 one open �ight
is only included in one pairing (similar to the way the initial pairing works,
4.1 tap-ai 2
by marking open �ights as used). This way one can be sure, that a �ight i
not overcovered, because multiply instances of the same open �ight is no
present in several pairings.
Mode 2 does not mark �ight as used thereby producing several pairing
possible containing the same open �ight. This is dealt with by a greed
heuristics that postprocesses the set of generated pairings and selects
subset that do not contain any duplicate use of �ights.
The two di�erent modes re�ects two di�erent (and greedy) ways of dealin
with the set partitioning problem that lies beneath; generate pairings tha
covers each open �ight exactly once.
In the following descriptions of the heuristics used in the two modes ar
given.
Mode 1
Similar to the initial pairing a number of heuristics are tried in turn. The
all function on a list of pairings sorted by departure time (see �gure 4.7)
The heuristics start at the head of the list, and try to build a new pairin
constructed from pairings from the list. When a new pairing X is built it i
appended to the list and the pairing used (B, E and G) are marked as use
and ignored afterwards.
A B C D E F G X
E
G
B
Figure 4.7: List of pairings.
The �rst heuristic traverses the list of pairings looking for pairings, whic
starts or ends on a homebase. When such a pairing is found it is checked
it starts on a homebase. If it does not start on a homebase passive transfe

4.1 tap-ai 21
is added (if possible) to make it start on a homebase (making sure the
pairing is still legal). If this succeeds the result is a pairing like Pairing 1
on �gure 4.8, where X is a homebase, the leg X-b is possibly passive and
Y is a homebase. Next the list of pairings is traversed looking for another
pairing Pairing 2 with a connection time less than 5 hours if X=Y or less
than 15 hours if X6=Y. Pairing 2 is appended to Pairing 1 if the new
pairing is legal, and if one of the following holds:
� The new pairing is balanced.
� If it starts and ends on a homebase and covers at most two days.
� If it covers at most two days and can be balanced by adding passive
transfer.
New pairings are appended for as long as possible, under the rules described
above along with the 5/15 hours rule, forming one long pairing.
X b c Y
X!=Y: <15h
X=Y: <5h
d e fY
Pairing 1 Pairing 2
Figure 4.8: Pairing 2 are appended at Pairing 1 by the 5/15 hour rule.
The second heuristic is just like the �rst with the exception that passive
�ights are considered (when trying to connect the two pairings) if there is
at most 24 hours between them and if it does not create a night stop on
the base where the pairing starts.
The third heuristic tries to balanced pairings, which either starts or ends
on a homebase, by adding passive transfers. Optionally it is also attempted
to remove the �rst or the last leg if this would balance the pairing.
The fourth heuristic tries to connect unbalanced pairings that starts and
ends on a homebase (possible with a passive transfer) to make them bal-
anced.
Finally, all pairings that contain a night stop on the starting base are broken
into smaller pairings on those bases.
4.1 tap-ai 2
Mode 2
Mode 2 is very similar to mode 1 except that it does not mark pairing
as used. This is illustrated on �gure 4.9, which corresponds to �gure 4.7
Hence all possible combinations of pairings starting with B, that ful�lls th
requirements of the given heuristic, are built.
A B C D E F G X
G
E
Y
B B
F
G
Figure 4.9: List of pairing.
Mode 2 therefore produces pairings, where several instances of the sam
open �ight may be present in, several di�erent pairings. As describe
above, the problem now is to solve a set partitioning problem. This is don
using a greedy heuristic which sorts the pairings by density. The densit
of a pairing is de�ned as the total number of �ights in the pairing minu
the number of passive transfers. Hence, the density is a pairing qualit
measure. The heuristic chooses the pairing with the highest density �rs
and rule out all other pairings that contains �ights also present in th
chosen pairing. This way a best �rst principle is used.
The �nal result from the pairing process (despite the mode) is a set o
pairings covering each �ight exactly once.
However, mode 2 is not considered fully developed and has therefore no
been put into production.

4.2
Theprosandconsoftap-ai
23
4.2
Theprosandconsofta
p-a
i
Asalreadymentioned,theusefulnessofthereorderingpartoftap-aihas
beenheavilylimitedbythenewunionagreements.
Outofthetwomodesthatdoespairinggeneration,onlymode1hasmade
itintoproduction.Theproblemwithmode2isthatitusesahugeamount
ofmemoryandisslowcomparedwithmode1.Mode1isabletoquickly
produceasetofpairingswhichcoverstheopen�ights.However,sinceno
informationabouttheavailableresourcesinscheduleareused,thereisno
guaranteethatthegeneratedpairingscanbeassignedtocrew.Inpractice
ithasturnedout,thatthepairingsgeneratedbymode1oftendonot�t
theavailableresourcesinschedule.Thusmode1israrelyusedbythesta�
atsas.
Anotherdrawbackaretheheuristicsusedintheinitialpairing.Asone
mighthavenoticedtheyareredundantandstillresideinProlog,where
therestoftap-aiisimplementedinC/C++.Hence,maintenanceofthe
initialpairingisharderandmakingtap-aimorecomplexasawholemore
complex.
2
Chapter5
SolutionApproach
Asalreadydescribedthenewunionagreementshavemadetap-aie�ec
tivelyuseless.Theattemptmadetoovercomethesenewrestrictionswast
maketap-aiapuregeneratorwhichcouldbeusedbythesta�inthetrack
ingdepartment.However,asalreadydescribedithasnotbeensuccessfu
duetothequalityofthegeneratedpairings.Thereforesighaslookedfor
waytoimprovethegeneratedpairingsand,ifpossible,awayofassignin
crewtothegeneratedpairingsaswell.
Theusualapproachforpairingconstructiondoesnotincludeinformatio
aboutthecrewthat(atsomepointintime)isgoingto�ythepairing
Thismakessenseinthepairingphase(see�gure1.2)becausetheavailabl
resourcesintheassignmentphasearequiteuniform
amongcrew;noo
littleworkhasbeenassignedtocrewatthispoint.However,inthetrackin
phaseresourcesarespreadmorenon-uniformlyamongcrewbecausealarg
numberofpairingsalreadyhavebeenassignedtocrew.Thereforeth
pairingsthataregoingtobeassignedinthetrackingphasehastob
tailoredtothecrewthathastocoverthem.Firstly,thecrewhastob
availableintheperiodoftimethepairingcovers.Hencesheisgoingtob
onsomeformofstandby(standby,blank-day,usable-timeetc.).Secondly
thestartandendbasesofthepairinghaveto�twiththebaseatwhichth
crewisstandbyorithastobepossibletousepassivetransferstotranspor
thecrewto/from
thestart/endofthepairing.Thirdly,thepairingshav
tobelegal.

5.1 Pairing generation 25
The main idea which sig had considered was this tailoring of pairings. Gen-
erating tailored pairings for each crew also lie in the line of the reviewed
literature (see chapter 3). Here, a graph Gk which for each crew k rep-
resents the set of pairings tailored for k was widely used. Especially, in
the tracking and day-to-day phases for the reasons described above. The
pairings given by Gk was the used as columns in a Set Covering Problem or
Set Partitioning Problem. Below, a solution approach using these elements
will be presented. Firstly, the generation of pairings (Gk) will be covered
followed by the selection of the pairings each crew is to man.
5.1 Pairing generation
The goal of the pairing generation is for each crew to generate a set of
pairings that she might �y. This is conceptually done by searching through
a graph Gk for each crew k which represents the pairings constructed from
the open �ights which are tailored for k.
Firstly, a more precise de�nition of how resources are identi�ed will be
given, followed by a presentation of a number of heuristics for searching for
pairings in Gk.
5.1.1 Resources
A resource is a crew that has one or more standby allocated in her schedule.
A resource period is one or more successive standby periods in a crew
schedule. This de�nition might be extended to blank-days, usable-time
and �holes� (described in chapter 2). However, the majority of resource
time allocated in the schedule is standby and the extension might not be
straight forward due to di�erences in the rules concerning the use of the
di�erent resources. Thus only standby is considered.
On �gure 5.1 two resource periods are shown in which crew might be able
to cover some open �ights. The �rst period (between t1 and t2) is simple;
it consists only of 1 standby. An upper bound on the total production
time which can be assigned during this period is t2 � t1. The next period
(between t3 and t8) is formed by three successive standby. Here t8 � t3
is an upper bound but not a particularly tight one. A better bound is
(t4� t3)+(t6� t5)+(t8� t7), because allthough one may assign production
5.1 Pairing generation 2
Time
Period Period
t3 t4 t5 t6 t7 t8t1 t2
Figure 5.1: A sample schedule for a crew. Solid lines represents
production and dotted lines standby
between t3 and t8 the legality of the production is bounded by the sum o
the individual standby.
5.1.2 Pairings
As already described a pairing is a work shift for a crew. The estimate
duty time which a pairing takes up is the sum of the length of the dut
periods that makes up the pairing (see �gure 1.1).
The term partial pairing will be used to denote a pairing which is no
balanced (Starting and ending and the same base).
5.1.3 Depth �rst search
The construction of Gk is a way of enumerating all legal pairings for a crew
k in a given resource period. As a �rst attempt a depth �rst search throug
all open �ights which lie within the given period (with respect to time) i
used.
On �gure 5.2 a sample search tree is shown. Here the resource is availabl
between t1 and t2 at base a. Each node in the tree corresponds to a le
and each edge to connection time. Each path in the tree, from the root t
a leaf, corresponds to a legal pairing to which the crew may be assigned.

5.1 Pairing generation 27
aaaaa
a
a
a
aaa
a
Time
aa
a
a
t1 t2
Figure 5.2: A sample search tree for the depth �rst search.
Nodes corresponds to legs and edges to connection time.
A closeup on the search tree is shown in �gure 5.3. Here four open �ights
can follow pi. Two to which it is directly connected, namely, pj and pk and
two, pl and pm, to which it is connected through passive �ights kl and km
respectively.
On table 5.1 pseudocode for a recursive depth �rst search which gener-
ates pairings is given. As arguments, DepthFirstSearch takes the pair-
ing p corresponding to the path to the current node in the search tree,
which initially is the empty pairing. Next it takes a list of partial pairings
[l1; : : : ; ln], which initially consists of one partial pairing for each open �ight
which matches the given resource period with respect to time. [l1; : : : ; ln]
is sorted by increasing departure time. Finally, Pr is the set of generated
pairings for resource period r.
Line 3-9 check the possible direct connections connecting p with an open
�ight. This corresponds to the connection between pi 7! pj and pi 7! pk on
�gure 5.3.
Line 10-17 check for possible connections between p and an open �ight
through a passive connection, which corresponds to pi 7! kl 7! pl and
pi 7! km 7! pm on �gure 5.3.
Line 19-24 check for passive �ights that would balance the current pairing.
Which corresponds to node kn on �gure 5.3.
Each of the 3 parts (line intervals) described above have more or less the
same structure. Firstly, they check if the given connection should be tried
5.1 Pairing generation 2
pi
pl
kmpm
pk
pj
kl
kn
Figure 5.3: A node pi in the searchtree with successors pj , pk pl
and pm. pl and pm are connected by two passive �ights kl and
km.
with the �okto� predicates in line 3, 10 and 19. If the connection shoul
be tried they check if a legal pairing has been generated (lines 5, 12 an
21) in which case it is saved (line 6, 13 and 22). If the connection does no
result in a legal pairing they check if the subtree beneath the current nod
should be explored (lines 7 and 14).
A more in-depth description of the di�erent predicates follows.
okToAppend(p,l,r)
okToAppend(p,l,r) is a predicate that decides if l should be appended t
p when trying to build a pairing for resource r.
On �gure 5.4 the situation is sketched. Firstly, it is checked whatever l
departure base c matches p's arrival base b and if the connection tim
between p and l, t3 � t2, lies within a prede�ned interval. Secondly, it i
checked whatever l lies within the current resource periods time interva
(t4 � t5 and t1 � t3). Finally, it is checked whatever the estimated duty o
p [ l is bigger than the estimated duty for the given resource period.

5.1 Pairing generation 29
1 DepthFirstSearch(p,[l1; : : : ; ln],Pr,r)
2 for li 2 [l1; : : : ; ln]
3 if okToAppend(p,li,r)
5 if isValid(p[ li,r)
6 Pr = Pr [ [p [ li]
7 else if okToContinue(p[ li,r)
8 DepthFirstSearch(p[ li,[li+1; : : : ; ln],Pr,r)
9 end
10 else if okToAppendWithPassive(p,li,r)
11 k = GetPassive(p,li,r)
12 if isValid(p[ [k] [ li,r)
13 Pr = Pr [ [p [ [k] [ [li]]
14 else if okToContinue(p[ [k] [ li,r)
15 DepthFirstSearch(p[ [k] [ li,[l1; : : : ; ln],Pr,r)
16 end
17 end
18 end
19 if okToBalanceWithPassive(p,r)
20 k = GetPassive(p,r)
21 if isValid(p[ [k],r)
22 Pr = Pr [ [p [ [k]]
23 end
24 end
Table 5.1: Pseudocode for a depth �rst search procedure that
generates pairings.
isValid(p,r)
isValid(p,r) checks whatever a pairing p is valid according to union and
governmental rules. This is done by a system called rave, which sas
currently uses to ensure legality of the schedule. The check is performed
by inserting the pairing p into the crew r's schedule and then validate the
schedule using rave.
5.1 Pairing generation 3
Time
Basesa a b c d a
p
t1
l
t2 t3 t4 t5
Figure 5.4: Partially pairing l sought appended to partially pair-
ing p. The corresponding resource period start and end at base
a from time t1 to t5.
okToContinue(p,r)
okToContinue(p,r) checks if the subtree rooted at p should be explore
for resource period r. Here a partial legality check is used to ensure tha
no illegal node is explored any further. However, since the pairing is onl
partial, only a partial legality check can be performed. The pairing p i
inserted into crew r's schedule, however all activities which lie after p ar
removed from the schedule before the legality check is performed. This i
done since the pairing p is not balanced and therefore do not (yet) �t wit
the part of the schedule which lies after it.
okToAppendWithPassive(p,l,r)
okToAppendWithPassive(p,l,r) checks whatever p and l can be connecte
through a passive �ight. The requirement is that (see �gure 5.4) p arriv
on a di�erent base than l (b 6= d), and that the time interval between
and l is so �big enough� for a passive �ight to be inserted.
GetPassive(p,l,r)
GetPassive(p,l,r) returns a passive connection to connect p and l if pos
sible. This is done by querying the sig utility for a passive connection.

5.1 Pairing generation 31
okToBalanceWithPassive(p,r)
okToBalanceWithPassive(p,r) checks whatever it is realistic to balance
pairing p (see �gure 5.5) with a passive �ight. The requirement is that the
time between the arrival at b (t2) and the end of the given resource period
(t3) is big enough for at passive �ight and that p is not balanced already
(b 6= a).
Time
Basesa aba
t1 t3t2
p
Figure 5.5: Partially pairing l sought appended to partially pair-
ing p. The corresponding resource period start and end at base
a from time t1 to t5.
5.1.4 Depth-best �rst search
In the above description of the depth �rst search an implicit priority is used
during the search because [l1; : : : ; ln] is sorted by increasing departure time.
This way �ights with a small connection times are sought connected before
�ights with long connection times. This priority might not be optimal.
If a cost could be assigned to a pairing then at each node all possible
successors could be generated and sorted according to this cost. At each
node this would form a searchfront with a given length LSF . The nodes is
the searchfront could then be explored in turn by increasing cost.
5.1.5 Pairing cost
Estimating the cost of a pairing is not straightforward. Many factors in-
�uence on the quality of a pairing. Currently the only measurement used
by sig is the density of a pairing (introduced in section 4.1.3) which is the
total number of �ights in the pairing minus the number of passive �ights.
5.1 Pairing generation 3
This, however, is a very coarse estimate. Therefore a more �exible estimat
is introduced.
Together with sig, four aspects of a pairing have been identi�ed whic
in�uence the quality of a pairing and therefore should be re�ected in th
cost. These aspects will be introduced below.
Duty
The amount of open �ight duty which the pairing covers is important. Th
(estimated) duty of an open �ight has already been introduced in sectio
5.1.2 as the sum of the duty periods that make up the pairing. To mak
this comparable between di�erent resource periods the cost for duty is see
relatively to the estimated duty of the period the pairing is intended for:
Duty cost = 1�
Estimated duty of pairing
Estimated duty of resource period
In other words, this specify what you get (the duty covered by the pairing
relative to what you pay (the duty allocated in crew schedule). Since th
ratio grows, as the amount of duty that is covered grows the ratio actuall
measures what you gain. Therefore 1 minus the ratio is used as the cost. A
implicit assumption is made here that the remaining time in the resourc
period is not usable. Even though this might not be the case all the time
it seams reasonable during tracking. Here the goal is to use the resourc
periods allocated in the schedule and not to build up a schedule for from
scratch.
Passive �ights
The passive duty time in a pairing is also important since it basically i
time where a crew gets payed but do not work. Some passive legs in
pairing might be changed to �ordinary� legs, before crew sees the pairing
However, this is far from always the case and therefore passive �ights shoul
be avoided.
Once again a ratio is used to make the measure comparable:
Passive cost =
Estimated passive duty of pairing
Estimated duty of resource period

5.1 Pairing generation 33
Problem �ight
The notion of problem �ight arises because some open �ights are more
desirable to cover then other, or � put in other words � some open �ights
are more di�cult to cover than other.
A �ight from Copenhagen to Aalborg departing at 12.00 is easy to cover
compared with a �ight from Stockholm to Munich at 23.00. Therefore it
is more desirable to cover the second �ight than the �rst at this point in
the solution process. This idea is somewhat similar to that of reordering
(see section 4.1.2). Here the �ights are also ranked according to how big a
problem they are. And �ights that are bigger problems are sought swapped
into the schedule instead of less problematic ones.
Together with sig the following 4 aspects of an open �ight have been iden-
ti�ed which characterize a problem �ight:
� Time of departure (Early departures are problems).
� Time of arrival (Late arrivals are problems).
� Length of �ight (Long �ights are problems).
� If �ight creates a night stop (Night stops are problems).
Again a ratio is used to make the cost comparable between di�erent resource
periods.Problem Cost = 1�
Duty of problem legs
Estimated duty of resource period
Crew cover
Crew cover is the average ratio of crew which have resource periods which
matches (with respect to time) the legs in the given pairing. This gives a
rough estimate of how likely it is that the legs in the pairing can be covered
by another crew.
The cost of a pairing is a weighted sum of the introduced costs:
Cost =Duty Weight�Duty Cost+
Problem Weight� Problem Cost+
Passive Weight� Passive Cost+
Crew Cover Weight�Crew Cover Cost
5.1 Pairing generation 3
5.1.6 Searching from the �middle and out�
The search strategy forces a given partial pairing to be part of the pair
ings that are generated. This is illustrated on �gure 5.6. Here a partia
pairing from b to c is used as a starting point for 2 depth �rst searches
One searches backwards in time towards the start of the given period an
another forward in time towards the end of the period.
A modi�ed version of the depth �rst search described in section 5.1.3 i
used. The largest modi�cation is that between t1 and t2 the search has t
be backwards in time form b towards a.
a
aaa
a
aa
aa
cb
a
a
a
a
a
aa
Time
t1 t4t2 t3
Figure 5.6: A sample search tree for depth �rst searching back-
and forward from a given pairing.
5.1.7 Preprocessing of the open �ights
When constructing pairings for di�erent resource periods (di�erent crew
several open �ights will be sought connected over and over again. Therefor
a preprocessing of the open �ights where all possible successors are foun
for each �ight might improve performance. This idea forms a clone betwee
the classical approach, where all pairings are generated �rst and then crew
are assigned, and the idea that is tested in this project where crew ar
considered in the generation process.
The idea is to construct two maps which for each leg gives the possibl
direct successors and possible successors through a passive leg. Thought o
in terms of graphs the two maps represents a �meta graph� G that contain

5.2
Pairingselection
35
allpairingsthataregoingtobeconsidered.Thepathsrepresentedbythe
crewspeci�cgraphGk
arethenasubsetofthepathsinG.Pseudocode
forgeneratingthemapsisgivenintable5.2.
1
ConstructSuccessorMaps([l1;:::;ln],DS,PS,P)
2
forl i2
[l1;:::;l n]
3
forl j2
[li+1;:::;ln]
4
ifdirectSuccessor(l i,l j)
5
DS[li]=DS[li][
l j
6
elseifpassiveSuccessor(l i,l j)
7
PS[li]=PS[li][
l j
8
P[(l i;lj)]=GetPassive(l i,l j)
9
end
10
end
11
end
Table5.2:Pseudocodefortheconstructionofsuccessormapsforeachleg.
ConstructSuccessorMapstakes4arguments:Thelistofopen�ights
[l1;:::;ln]and3maps.DSisamapbetweenalegl iandalistofpos-
sibledirectsuccessorsofl i.
PS
mapsbetweenalegl iandthepossi-
blesuccessorsthroughapassiveleg.P
mapsapairofopenlegs(li;lj)
tothecorrespondingpassivelegthatcanbeusedtoconnectl iandl j.
directSuccessor(l i,l j)isapredicatethatindicatesifl jisapossibledi-
rectsuccessorofl i.passiveSuccessor(l i,l j)isapredicatethatindicates
ifl iandl jcanbeconnectedthroughapassiveleg.
Nowaslightlymodi�edversionofthedepth-�rstsearchfromtable5.1can
beusedtosearchtheopen�ightsgivenbythemaps.
5.2
Pairingselection
Intheprevioussectionasetofpairingshasbeenconstructedforeachre-
sourceperiod.Inthissectionwefocusontheselectionofasubsetofthose
pairingswhichwillbetheonesactually�own.Theproblem
consistsof
choosingatmostonepairingforeachresourceperiodthatthecorrespond-
ingcrewhastocover.TheproblemismodelledasaSetCoveringProblem
plussomeextraconstraints.Theseconstraintsensurethatacrewisnot
5.2
Pairingselection
3
assignedtwodi�erent�ightsatthesametime.Thisisdonebygroupin
thepairingsaccordingtothecrewtheywheregeneratedfor(seetable5.3
andthenallowatmostonepairingtobeselectedwithineachgroup.
ThechoiceofaSetCoveringProbleminfavourofaSetPartitioningProb
lemrestinthenatureofthetwoproblems.Sinceovercoverageisallowedi
theSetCoveringProblem,itisalwayseasytoconstructafeasiblesolutio
(giventhatallrowsarecoveredbyatleastonecolumneach);justinclud
allcolumns.OntheotherhandtheSetPartitioningProblemdoesnota
lowforovercoverage,andjust�ndingfeasiblesolutionmightbehard.Th
drawbackofusingthecoveringmodelisthatsome�ightsmightbecovere
severaltimes.
Amathematicalformulationoftheproblemfollows.
Maximize
Z=
m X i=1
c ixi
(5.1
Subjectto
m X i=1
aijxi�
1;
forj=1;:::;n
(5.2
X i2Ip
xi�
1;
forallcrewp
(5.3
xinonnegativeinteger
(5.4
xiisabinarydecisionvariablethatdecideswhetherpairingiisusedinth
solutionornotandc iisthecorrespondingcost.aijindicatesifopen�ight
iscoveredbypairingi.Ipisthesetofindicesforcolumnscorrespondingt
crewp.The�rstsetofconstraintsensuresthatallopen�ightsarecovere
atleastonce(5.2).Thesecondsetofconstraintsensuresthateachcrew
contributewithatmostonepairingtothesolution(5.3).
Toensurethatafeasiblesolutionalwaysexists,socalledghostcrew
ar
introduced.A
ghostcrewhasthepropertythatithasexactlyonepair
ingassociatedandthispairingcoversexactlyoneopen�ight.Henceon
ghostcrewisintroducedforeachopen�ight.Anotheruseoftheghostcrew
istocontrolthesearchprocess,sincethecostplacedonaghostcrewco
umnwilla�ecthowdesirableitistoincludenon-ghostcrewcolumnstha
coversthesamerowasthegivenghostcrewcolumn.

5.2
Pairingselection
37
Intable5.3anexampleofaprobleminstanceisgiven.Thepairingsforthe
�rstcrew,crewA,correspondstothe�rstkA
columns,crewBthenextkB
columnsandsoforth.Thelastncolumnscorrespondtotheghostcrews;
oneforeachopen�ightformingtheunionmatrix.
c 1
���
c kA
c kA
+1
���
c kA
+kB
���
c l
c l+1
���
c l+n
1
���
1
0
���
0
���
1
0
���
0
1
0
���
0
0
���
1
���
0
1
���
0
1
. . .
���
. . .
. . .
���
. . .
. . .
. . .
. . .
. ..
. . .
. . .
0
���
1
1
���
1
���
0
0
���
1
1
Table5.3:AnexampleofaninstanceoftheSetCoveringProb-
lem.Withnrowscorrespondingtoopen�ightsandm
columns
topairings.
5.2.1
Solvingthesetcoveringproblem
Therearemanypossiblestrategies(see[2]forasurvey)forsolvingthe
SetCoveringProblem.Onecouldtrytousealinearoptimizer1,oneofthe
manyheuristicsbasedonLagrangianrelaxationcombinedwithsubgradient
optimizationorsomeotherheuristicssuchasmetaheuristics.
Therearetwomajorproblemswiththeuseofalinearoptimizer.Firstly,
sig
currentlyhasnotgotone,soifthisapproachshouldbetakenthey
wouldhavetobuyone.Secondly,theproblem
whichhastobesolved
willbeverylargecontainingbetween100and1000open�ights(rows)and
allfromafewthousandupto150000pairings(columns).Theremightbe
notablesavingsintimeusingaheuristiccomparedwithanlinearoptimizer
whitproblemsofthatsize.Theadvantageofgettingtheoptimalsolution
mightbeoverlookedduetothefactthatthecostusedonlyisarough
estimate.Thecostismostlyusedasameanofguidingthesolutionprocess
ratherthanapreciseestimateofsolutioncost.Thereforethedi�erence
betweentwosolutionsthathaveaobjectvaluewithinafewprocentmight
be�invisible�tosas.
UsingLagrangianrelaxationcombinedwithsubgradientoptimizationisaf-
fordablemeasuredinrunningtime.Butsinceextrarestrictionhasbeen
1SuchasCPLEX
5.2
Pairingselection
3
introducedintothemathematicalmodelofthestandardSetCoveringProb
lem,itisnotobviousifLagrangianrelaxationcouldbeappliedsuccessfully
OntopofthisLagrangianrelaxationishardtoimplement.Thepossibl
gainwouldbeinsolutionqualitybecauseLagrangianrelaxationisknow
tooutperform
otherheuristicswhensolutionqualityismeasured.Buta
notedabovethegaininsolutionqualitymightnotbeworththetrouble.
Thedesiredcharacteristicspointinthedirectionofa(meta)heuristic
Firstly,theyareabletosolvelargeproblemswithareasonablesolutio
qualityveryfast.Secondly,theyareofteneasytoimplement.Ithasbee
possibleto�ndasetofsuccessfulapplicationsofSimulatedAnnealingo
thesetcoveringproblemandthereforeSimulateAnnealingischosen.
Intable5.4pseudocodeforthesimulatedannealing[10,1]heuristicisgiven
AsargumentsSimulatedAnnealingtakestheSetCoveringProblemSCP
thestarttemperatureT0,thecoolingfactor�andmaximum
numbero
iterationsi max.
1
SimulatedAnnealing(SCP;T0;�;maxIter)
1
XB
=;
2
cost(XB
)=1
4
X
=generateSolution(XB
,SCP)
3
fori2
0;:::;imax
and
notstop()
6
X0
=searchNeighbourhood(X;SCP)
7
Æ=cost(X0)�
cost(X)
8
$
=random[0;1[
9
ifÆ<0or$
<e
�
Æ Ti
10
X
=X0
11
ifcost(X0)<cost(XB
)
12
XB
=X0
13
end
14
end
15
Ti+1
=��
Ti
16
end
Table5.4:Simulatedannealing.

5.2
Pairingselection
39
Solutionandneighbourhood
AsolutionX
isaselectionofcolumns(pairings).X
isfeasibleifall�ights
arecoveredatleastonceandifthereexistnogroupinwhichtocolumns
areselected.
TheneighbourhoodofasolutionX
isde�nedasthesetofsolutionsthat
canbeobtainedbyrandomlydroppingdcolumnsfrom
X
andrebuilding
thesolutionwithoutreusingthedroppedcolumns.Theconstraintthatthe
droppedcolumnscannotbereusedonlyappliestonon-ghostcrewcolumns.
Thisensuresthattheneighbourhooddoesnotcontaininfeasiblesolutions.
Ifitwaspossibletoforbidtheselectionofaghostcrewcolumnafterithad
beendropped,itwouldnotbeguaranteedthatafeasiblesolutioncouldbe
constructed.Theproblem
arisesifaghostcrewcolumnisdroppedwhere
thematchingrowcannotbecoveredbyanyothercolumn.
Solutiongeneration
generateSolution(X,SCP)usesagreedyheuristictogenerateasolution
givena,possibleempty,solutionX
andtheproblemSCP.Thefunctionis
sketchedontable5.5.Itselectsatrandomanuncoveredrowj(line3)and
calculatesforeachcolumnithatcoversjtheratiobetweenthenumber
ofuncoveredrowscoveredbyiandthecostofi(line7-9).Thecolumni
thatmaximizesthisratioisincludedinthesolution(line12).Thisprocess
continuesuntilafeasiblesolutionisobtained.
Notethatonlythosecolumnsithatdoesnotful�llthepredicate
okToSelect(i,X,SCP)areconsideredinlines6-9.Therearetwocases
whereitisnotallowedtoincludecolumni:
�
Ifanothercolumnwhichisinthesamegroupasialreadyisselected
(whichcorrespondstoconstraint(5.3)fromthemathematicalformu-
lation)or
�
ifcolumniisanon-ghostcrewcolumnthathasjustbeendropped
fromthesolution(whichcorrespondstotheconstraintintroducedin
thede�nitionoftheneighbourhood).
5.2
Pairingselection
4
1
generateSolution(X,SCP)
2
whilenotfeasible(X)
3
j=selectUncoveredRow(X,SCP)
4
ratio=�
1
5
i max=�
1
6
fori2
isCoveredBy(i,j)andokToSelect(i,X,SCP)
7
ifuniqueCovers(i)
cost(i)
>ratio
8
ratio=
uniqueCovers(i)
cost(i)
9
i max=i
10
end
11
end
12
X
=X
[
i max
13
end
Table5.5:Agreedyapproachforsolutiongeneration.
Stoppingcriteria
Thefunctionstop()(intable5.4)representsthestoppingcriteria.Th
simplestpossiblemaybea�xnumberofiterations.Eventhoughthi
criteriamightseam
pooritisoftenusedinconjunctionwithsomeothe
criterion.Choosingamaximum
numberofiterationsisoftenusedtopre
determineanupperlimitonthesolutiontime.
Ifthemaximum
numberofiterationsischosenlargeenoughitisalmos
alwaysthecasethatthesolutionprocesscanbestoppedbeforethisnumbe
ofiterationsisreached.Anaturalmeasuretoapplyistolookatthelas
Literationsandobservehowtheobjectvaluehasvaried.Ifnoorlittl
variationhasbeenobservedthesolutionprocessishalted.

41
Chapter 6
Implementation
This chapter gives a short overview of the implementation. The program
has been implemented as an extension to tap-ai. The advantages using
this approach are many; �rstly, sig's existing data structures and library
functions can be used. This way pairings, �ights, schedules, crew etc.
are already implemented and ready to use together with several library
functions where the most important are the legality checking functions.
Secondly, this makes it easy to extract data from sas and use it to test
the program. The drawback is that tap-ai has been developed within
several di�erent programming paradigms: It started out as a Prolog pro-
gram, then some of the code was ported to C and lately an object oriented
approach has been used using C++. Nowadays, the program can run com-
pletely without using the parts of the program that still resides in Prolog.
As a natural choice an object oriented approach has been taken given that
sig currently has used this paradigm in the development of tap-ai.
There has been written around 9000 lines of code in this project. The code
and test data are available at imm at /home/proj/proj7/public.
In the program code for tap-ai the term sling is used which is a synonym
for pairing. Hence, to keep the terminology consistent sling has been used
instead of pairing in the code. However, to avoid confusion in this report
the term pairing is used on the subsequent �gures.
6.1 Program design 4
6.1 Program design
On �gure 6.1 the relations between the main pairing generation objects ar
given. Two main components are the representation of resources and th
generation of pairings. For each crew a resource class is given (CrewResour
which contains a linked list of the resource periods where the crew ma
work (CrewResourcePeriod). The pairing generation heuristics are im
plemented through a Strategy pattern [5]. Therefore an abstract pair
ing generator class has been made (PairingGenerator). This way new
pairing generators can easily be added: They just have to implemen
the PairingGenerator interface. Hence, implementing and experiment
ing with the di�erent heuristics described in section 5.1 has been mad
easy. On �gure 6.1 the inheritance from the PairingGenerator-class to th
PairingGeneratorDepthFirst-class (implementing the depth-�rst searc
from section 5.1.3) has been shown. Similar inheritances have been mad
for classes implementing the other generation heuristics.
generator: PairingGenerator
period: CrewResourcePeriod
PairingGenerator
CrewResourcePeriod
next: CrewResourcePeriod
candidatepairings: PairingList
+ GeneratePairings
CrewResource
firstPeriod: CrewResourcePeriod
crew: CrewInfo
PairingGeneratorDepthFirst
+ GeneratePairings
Figure 6.1: UML-diagram for the classes representing the re-
sources and the associated pairing generation heuristic.
On �gure 6.2 a diagram is given showing the relation between the tw

6.2 Memory consumption 43
classes that represent the Set Covering problem and the class that rep-
resents the Simulated Annealing heuristics that is used the solve the Set
Covering Problem. The problem is split into two classes: One that repre-
sents the problem (SetCoveringProblem) and one that represents a solu-
tion (SetCoveringSolution). Hence all data common to di�erent solutions
to the same problem are kept in the problem class.
SetCoveringProblem
SetCoveringSolution
problem: SetCoveringProblem
SimulatedAnnealing
Figure 6.2: UML-diagram for the classes representing the Set
Covering Problem and the Simulated Annealing heuristic.
6.2 Memory consumption
During the implementation a high memory usage has been observed (in
some situations above 1 GB), which points in the direction of a memory
leak.
For the part of the code which has been written in this project some leaks
where found and corrected. Some testing has been carried out to detect
further leaks in the added code, however, no further sign of leaks could be
found. One leak was found in the original code from sig; unfortunately sig
has not yet had the time to close the leak.
The high memory usage still persist and as will be described in the following
chapter several test have been aborted due to high memory consumption.
4
Chapter 7
Results
In this chapter the software will be tested on �real life� data from sas
Firstly, a description of the di�erent data sets used will be given. This i
followed by a description of the tuning of the parameters which are par
of solution process, such as simulated annealing parameters, weights in th
cost function and so forth. Finally, the di�erent heuristics are tested an
compared.
The tests have been carried out at imm on serv2 and serv3 which bot
are HP servers model J7000 running HP-UX 11i. They each have 4 44
Mhz CPU's and 4 GB memory.
7.1 Data
The data sets used in this chapter consists of �real world� snapshots take
from sas's schedule. A snapshot of the schedule gives the present status o
the schedule at the point in time it is taken. The current set of open �ight
is given and for each crew the current activities assigned are given. Befor
the actual data is presented a short description of three important factor
will be given.
Crew category describes the type of personal to consider. There are tw
meta categories cabin and �ight deck. Within each meta categor

7.1
Data
45
thereareseveraldi�erentsubcategories.Asdescribedearlierthis
projectfocusesoncabincrew
andthereforethethreemaintypes
ofcabincrewareincludedinthedata.Thisisreasonablebecause
oftenacrewisquali�edtoworkasallormanyofthedi�erentsub
categorieswithinoneofthemetacategories.
Timeintervalistheperiodoftimethesnapshotcovers.Ifasmallinterval
ischosentheproblemcanbesolved�fast�becausethenumberofopen
�ightsandthenumberofcrew
areproportionalwiththeinterval
length.Butasmallintervalmightnotbesolved�good�becausethe
continuityoftheproblem.Manyopen�ightsmightlieclosetoor
crosstheendingsoftheintervalwhichmakesthem
impossibleto
cover.
Timebeforeoperation
isthenumberofdaysbetweenthedaythesnap-
shotwastakenandthe�rstdayinthesnapshot.
Inall16di�erentsnapshotshavebeentaken.Theshotshavebeendivided
into4groupsaccordingtothetimeintervaltheycover.
Ontable7.1foursnapshotsarelistedeachcoveringatimeintervalof2
days.The�rstcolumnshowsthenameoftheshot,thesecondcolumnthe
timebeforeoperation,thethirdthedates(inFebruary)thatarecovered
bytheshot.Thetwolastcolumnsshowsthenumberofcrewsandthe
numberofopen�ightsrespectively.
Name
Time
before
operation
Date
Crew
Open�ights
1
1
6.-7.
226
168
2
2
7.-8.
226
198
3
7
12.-13.
297
133
4
14
18.-19.
334
215
Table7.1:Datasnapshotfrom
5thFebruary2002.Eachshot
covers2days.
On�gure7.1thedistributionofresourceperiodsondi�erenttimeintervals
isshownforthefoursnapshotsfrom
table7.1.The�gureshowshowthe
dataclosetooperation(snapshot1and2)hasmanyshortresourceperiods
andfewlong.Thedatasetswith7and14daysbeforeoperation(snapshot
3and4)hasfewershortresourceperiodsandseverallongperiods.This
7.1
Data
4
situationarisesbecauseasoperationgetscloser,resourcesinschedulear
usedtocloseopen�ightsreducingthenumberofresourceperiodsandth
lengthoftheremainingresourceperiodsinschedule.The�top�inthe�20
25�-intervaliscausedbythefactthatsasoftenallocatesresourcestha
havethislength.
020406080100
120
140
160
180
9
periods
Est
imat
ed d
uty
(hou
rs)
Res
ourc
e pe
riods
, 5. F
ebru
ary
2002
cov
erin
g 2
days
]0-5
]]5
-10]
]10-
15]
]15-
20]
]20-
25]
]25-
30]
]30-
35]
]35-
40]
]40-
45]
]45-
1 2 3 4
Figure7.1:Numberofresourceperiodsversusresourceperiods
lengthforthedatasetfrom
table7.1.
Similartothepresentationofsnapshots1,2,3and4snapshot5,6,7,
and9arelistedintable7.2andthedistributionofresourcesperiodsi
shownon�gure7.2.

7.1
Data
47
Name
Time
before
operation
Date
Crew
Open�ights
5
2
7.-9.
294
245
6
5
10.-12.
331
212
7
8
13.-15.
358
285
8
14
19.-21.
456
209
Table7.2:Datasnapshotfrom
5thFebruary2002.Eachshot
covers3days.
020406080100
120
140
160
180
200
220
9
periods
Est
imat
ed d
uty
(hou
rs)
Res
ourc
e pe
riods
, 5. F
ebru
ary
2002
cov
erin
g 3
days
]0-5
]]5
-10]
]10-
15]
]15-
20]
]20-
25]
]25-
30]
]30-
35]
]35-
40]
]40-
45]
]45-
5 6 7 8
Figure7.2:Numberofresourceperiodsversusresourceperiods
lengthforthedatasetfrom
table7.2.
Snapshotsthatcovers4and5daysarelistedbelowintable7.3andtable
7.4withcorrespondingresourceperiodsdistributionsploton�gure7.3and
�gure7.4respectively.
7.1
Data
4
Name
Time
before
operation
Date
Crew
Open�ights
9
2
18.-21.
469
354
10
6
22.-25.
510
716
11
10
26.-1.
483
642
12
14
2.-5.
520
447
Table7.3:Datasnapshotfrom
15thFebruary2002.Eachshot
covers4days.
020406080100
120
140
160
180
9
periods
Est
imat
ed d
uty
(hou
rs)
Res
ourc
e pe
riods
, 15.
Feb
ruar
y 20
02 c
over
ing
4 da
ys
]0-5
]]5
-10]
]10-
15]
]15-
20]
]20-
25]
]25-
30]
]30-
35]
]35-
40]
]40-
45]
]45-
9 10 11 12
Figure7.3:Numberofresourceperiodsversusresourceperiods
lengthforthedatasetfrom
table7.3.

7.2
Modelparameters
49
Name
Time
before
operation
Date
Crew
Open�ights
13
2
18.-22.
553
502
14
6
22.-26.
563
899
15
10
26.-2.
555
751
16
14
2.-6.
611
512
Table7.4:Datasnapshotfrom
15.February2002.Eachshot
covers5days.
020406080100
120
140
160
180
200
9
periods
Est
imat
ed d
uty
(hou
rs)
Res
ourc
e pe
riods
, 15.
Feb
ruar
y 20
02 c
over
ing
5 da
ys
]0-5
]]5
-10]
]10-
15]
]15-
20]
]20-
25]
]25-
30]
]30-
35]
]35-
40]
]40-
45]
]45-
13 14 15 16
Figure7.4:Numberofresourceperiodsversusresourceperiods
lengthforthedatasetfrom
table7.4.
7.2
Modelparameters
Thee�ectonthesolutionfrom
thechoiceofvaluesforthedi�erentpa-
rameterswhichispartofthemodelaretestedandappropriatevaluesare
found.
7.2
Modelparameters
5
Forseveralreasonsthesetestshasonlybeencarriedoutonalimitedse
ofthesmallsnapshots.Firstly,thelongrunningtimesrangingfrom
coupleofhoursforthesmallshotsandmorethan10hoursforsomeofth
bigshotsmakestestingextremelytimeconsuming.Secondly,duetoth
memoryconsumption(asdescribedinsection6.2)ithasnotbeenpossibl
toruntestswithsomecombinationsofsnapshotandparameters.This�o
course�introducesfurtheruncertaintyregardingthechoiceofparameter
forthelargesnapshots.Hopefully,somesimilarityshouldexistamongth
snapshotsandtheparametersfoundwhentestingonthesmallsnapshot
shouldprovidegoodindicationsforthechoicesofparametersforthelarg
snapshots.
7.2.1
ParametersinSimulatedAnnealing
WhenusingSimulatedAnnealingseveralparameters(suchasstarttem
perature,coolingfactorandplateaulength)canbeadjustedandtheper
formanceoftheheuristicdependsheavilyonhowwelltheseparametersar
tuned.Intheliteratureitisoftenreportedthat�thebestparameterswa
foundaftermanyexperiments�.Thisisduetothefactthattheparameter
areheavilyproblemdependent.
Starttemperatureandcoolingfactor
AshintedinthepseudocodefortheSimulatedAnnealingprocedureth
coolingschemeisnota�plateauschedule�,wherethetemperatureiscon
stantinLsuccessiveiterationsandloweredeveryLiterations.Thereaso
isthatifvaluesforL,T0
and�aredetermined,asimilarbehaviourca
beachievedbysettingL=
1andraise�.Thereforethecoolingsched
ulesketchedinthepseudocode,wherethetemperatureisloweredateac
iteration,isusedandonlyT0
and�hastobeestimated.
On�gure7.5anaveragesolutionvalueisshownversusstarttemperatur
forthreedi�erentcoolingfactors.Foreachchoiceofcoolingfactoran
starttemperaturetheaverageistakenoverthe4datasetsfrom
table7.
(usingdepth�rstsearchforpairinggeneration).
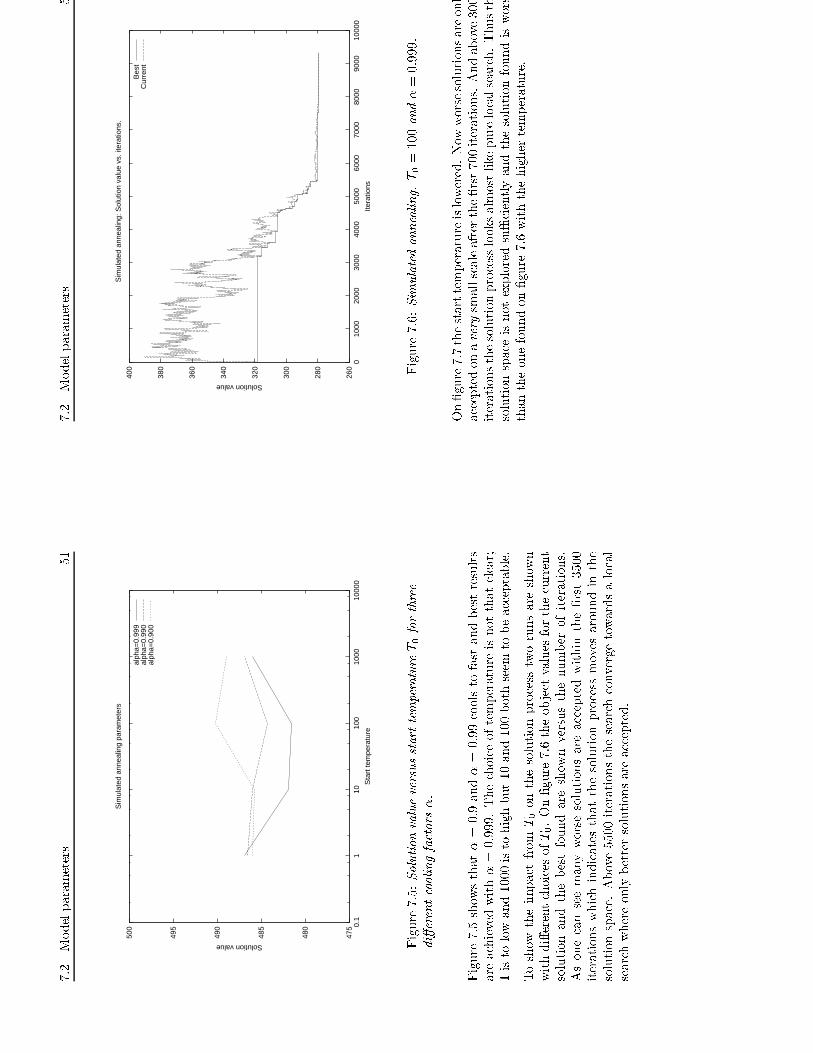
7.2
Modelparameters
51
475
480
485
490
495
500 0.
11
1010
010
0010
000
Solution value
Sta
rt te
mpe
ratu
re
Sim
ulat
ed a
nnea
ling
para
met
ers
alph
a=0.
999
alph
a=0.
990
alph
a=0.
900
Figure7.5:SolutionvalueversusstarttemperatureT0
forthree
di�erentcoolingfactors�.
Figure7.5showsthat�=0:9and�=0:99coolstofastandbestresults
areachievedwith�=0:999.Thechoiceoftemperatureisnotthatclear;
1istolowand1000istohighbut10and100bothseemtobeacceptable.
Toshowtheimpactfrom
T0
onthesolutionprocesstworunsareshown
withdi�erentchoicesofT0.On�gure7.6theobjectvaluesforthecurrent
solutionandthebestfoundareshownversusthenumberofiterations.
Asonecanseemanyworsesolutionsareacceptedwithinthe�rst3500
iterationswhichindicatesthatthesolutionprocessmovesaroundinthe
solutionspace.Above5500iterationsthesearchconvergetowardsalocal
searchwhereonlybettersolutionsareaccepted.
7.2
Modelparameters
5
260
280
300
320
340
360
380
400
010
0020
0030
0040
0050
0060
0070
0080
0090
0010
000
Solution value
Itera
tions
Sim
ulat
ed a
nnea
ling:
Sol
utio
n va
lue
vs. i
tera
tions
.
Bes
tC
urre
nt
Figure7.6:Simulatedannealing.T0
=100and�=0:999.
On�gure7.7thestarttemperatureislowered.Nowworsesolutionsareonl
acceptedonaverysmallscaleafterthe�rst700iterations.Andabove300
iterationsthesolutionprocesslooksalmostlikepurelocalsearch.Thusth
solutionspaceisnotexploredsu�cientlyandthesolutionfoundiswors
thantheonefoundon�gure7.6withthehighertemperature.

7.2
Modelparameters
53
285
290
295
300
305
310
315
320
325
010
0020
0030
0040
0050
0060
0070
00
Solution value
Itera
tions
Sim
ulat
ed a
nnea
ling:
Sol
utio
n va
lue
vs. i
tera
tions
.
Bes
tC
urre
nt
Figure7.7:Simulatedannealing.T0
=1and�=0:999.
Anotherindicator,oftenconsideredwhenvisualizingsimulatedannealing,
istheacceptancerate.Theacceptancerateistheratiobetweenthetotal
numberofacceptedneighbouringsolutionsandthetotalnumberofneigh-
bouringsolutionconsidered(forsomeiterationinterval).Theacceptance
ratecorrespondingto�gure7.6and�gure7.7isshownon�gure7.8and
�gure7.9respectively.
Arule-of-thumbstatesthattheacceptrateshouldbeintheinterval30%-
70%inthe��rstnumberofiterations�.Consideredthatthisonlyisarule-
of-thumbthesolutionprocessdepictedon�gure7.8seems�ne,eventhough
aninitialacceptancerateof80%
isobserved.Incontrasttheacceptance
rateofthesolutionprocessdepicted�gure7.9decreasesveryfastand
indicatesfurtherthatainitialtemperatureofT0
=1istoolow.
7.2
Modelparameters
5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
010
0020
0030
0040
0050
0060
0070
0080
0090
0010
000
%
Itera
tions
Sim
ulat
ed a
nnea
ling:
Acc
ept r
ate
Acc
epta
nce
rate
Figure7.8:Simulatedannealing.T0
=100and�=0:999.
0
0.050.1
0.150.2
0.250.3
0.350.4
0.45
010
0020
0030
0040
0050
0060
0070
00
%Ite
ratio
ns
Sim
ulat
ed a
nnea
ling:
Acc
ept r
ate
Acc
epta
nce
rate
Figure7.9:Simulatedannealing.T0
=1and�=0:999.

7.2
Modelparameters
55
Neighbourhood
Theimportantparameterwhendealingwiththeneighbourhood,isthe
numberofcolumnsdwhichisdroppedfrom
thecurrentsolution,when
searchingtheneighbourhood.On�gure7.10theplotshowsthein�uence
onthesolutionvaluefrom
di�erentchoiceofd.Asonecansee,achoice
between3and6seemsreasonable.Above6theplotshowsthatthedisrup-
tionofdroppingmorethan6columns,whensearchingtheneighbourhood,
resultsina�uctuatedsolutionvalue.
265
270
275
280
285
290
295
300
12
34
56
78
910
Solution value
d
Sim
ulat
ed a
nnea
ling:
Col
umns
to d
rop
Figure7.10:Solutionvalueversusd
Unfortunately,the�rstlimitedtestingshowedthatavalueofd=2was
su�cient.
Thusalargernumberofexperimentswascarriedoutusing
d=2.However,astheabovegraphshowsavalueof3or4shouldhavebeen
chosen.Tobeabletousetheresultsfromthe�rstlargesetofexperiments,
allsubsequentexperimentswasalsorunusingd=2.
7.2
Modelparameters
5
Modi�cationoftheacceptfunction
Duringexperimentswithsimulatedannealinganunfortunatepropertyo
thecombinationoftheneighbourhoodandtheacceptfunction(line9o
table5.4)hasbeenobserved.IfÆ=0theneighbouringsolutionwillalway
beacceptedsincee
�
0 Ti
is1forallpositivevaluesofTi.
Toovercom
this,theacceptfunctionismodi�edsotheneighbouringsolutiononlyi
acceptedifthe�old�acceptfunctionissatis�edandiftheobjectvalueo
theneighbouringsolutionisdi�erentfrom
theobjectvalueofthecurren
solution.ThereasonthatÆ=0isthatmanycolumnshasthesamepairin
cost,becausemanyarethesame.
7.2.2
Ghostcrew
cost
Therearetworeasonsfortheuseofghostcrew:Firstly,itensuresthat
feasiblesolutiontotheSetCoveringProblemcanbefound,andsecondly
�yetanother�meanofcontrollingthetradeo�betweencoverageofprob
lem
andnon-problem
�ights.Whenthecostofaghostcrewisalteredi
a�ectshowattractiveitbecomestoincludethecorrespondingcolumni
thesolution.Ahighghostcrewcostmakesitattractivetosearchforanon
ghostcrewcolumnthatcoverstherowcoveredbytheghostcrewcolumn.A
lowghostcrewcostdecreasesthegainofexcludingtheghostcrewcolum
fromthesolution.Byassigningdi�erentcoststotwoghostcrewcolumnsi
canbemademorepro�tabletocoveroneofthecorrespondingrowswit
anon-ghostcrewcolumnthantheother.
Belowtherewillbedistinguishedbetweentwotypesofghostcrewcolumns
Problemghostcrewcolumnscoveringrowscorrespondingtoproblem�ight
andghostcrewcolumnscoveringrowscorrespondingtonon-problem�ights
Onthefollowingthree�gures(�gure7.12,7.11and7.13)anaverageove
snapshot1,6and13havebeenused.
On�gure7.11theratiobetweenthenumberofproblem�ightscoveredan
thetotalnumberofopen�ightscoveredisplottedversusthedi�erenc
betweenghostcrewcostandproblemghostcrewcostfor�vedi�erentchoice
ofghostcrewcost.Asanexamplethesolidlinerepresentsachoiceof
forghostcrewcolumncost.Whentheghostcrewcostdi�erenceequals
thecostofaghostcrewcolumnequalsaproblem
ghostcrewcolumnan
approximately23%
oftheopen�ightscoveredareproblem
�ights.Sti

7.2
Modelparameters
57
usingthesolidlineasareferencepoint,raisingthedi�erencebetween
thecostghostcrewcolumnsandproblem
ghostcrewcolumnsto3makes
theratioofproblem
�ightsraiseto56%.Sincethecostofnon-ghostcrew
columnsarekeptconstantitbecomesincreasinglypro�tabletousenon-
ghostcrewcolumnsthatcoversproblem�ightsinsteadofthecorresponding
problemghostcrewcolumns.
Ascanbeseenitispossibletoa�ecttheratiobyincreasingthedi�erence
betweenghostcrewcostandproblem
ghostcrewcostwhentheghostcrew
costislow(1and2).However,iftheghostcrewcostbecomeslarge(espe-
cially8and16)thecostdi�erencebetweenghostcrewcolumnsandproblem
ghostcrewcolumnshasnoe�ect.Atthispointthecostofbothghostcrew
columnsandproblem
ghostcrewcolumnshavebecomesohighthatital-
waysisdesirabletocovertherowsbyincludingnon-ghostcrewcolumns.
0.150.2
0.250.3
0.350.4
0.450.5
0.550.6
0.65
00.
51
1.5
22.
53
Ratio between problem flights covered and total number of open flights covered
Gho
stcr
ew c
ost d
iffer
ence
Gho
stcr
ew w
eigh
ts: P
robl
em fl
ight
s co
vere
d
1 2 3 8 16
Figure7.11:Ratiobetweenproblem
�ightscoveredandopen
�ightscoveredversusdi�erencebetweenghostcrew
costand
problem
ghostcrewcost.
Anothere�ectthatthecostofghostcrewcolumnhasisontheratiobetween
open�ightscoveredandtotalnumberofopen�ights.Thisisillustratedon
7.2
Modelparameters
5
�gure7.12.Againusingthesolidlineasareferencepointandaghostcrew
costdi�erenceof0,40%oftheopen�ightsarecovered.Asthedi�erencei
increased,stillconsideringthesolidline,anincreaseinopen�ightscovere
isobserved.
Eachhorizontallinerepresentsachoiceofghostcrewcost;astheghostcrew
costincreases,moreandmoreopen�ightsarecovered.Thisliesinlineo
whatonewouldexpect:Asthecostonghostcrewincreasesitgetsmor
pro�tabletousenon-ghostcrewcolumnstocoverthecorrespondingope
�ights(rows).Whenthecostofghostcrewcolumnsbecomeshigh,allnon
ghostcrewcolumnsareincludedandfurtherincreaseofghostcrewcolum
costdoesnotresultinahigheropen�ightcoverage.Thisisillustratedb
thetwotopmosthorizontallinesrepresentingghostcrewcostof8and16
0.3
0.4
0.5
0.6
0.7
0.8
0.91
00.
51
1.5
22.
53
Ratio between open flights covered and total number of open flights
Gho
stcr
ew c
ost d
iffer
ence
Gho
stcr
ew w
eigh
ts: O
pen
fligh
ts c
over
ed
1 2 3 8 16Figure7.12:Ratiobetweenopen�ightscoveredandtotalnum-
berofopen�ightsversusdi�erencebetweenghostcrewcostand
problem
ghostcrewcost.
Thepricepayedwhenincreasingtheghostcrewcostsisanincreaseduseo
passive�ights.Thisisillustratedon�gure7.13;iftheghostcrewcosti
small(1and2)aninitiallowuseofpassiveisobtained.Asthedi�erenc

7.2
Modelparameters
59
betweenghostcrewcolumnsandproblem
ghostcrewcolumnsisincreased
theuseofpassiveincreasesaswell.Again,whentheghostcrewcostbe-
comeshigh(8and16)thecostofghostcrewcolumnsissohighthatitis
alwayspro�tabletocovertherowsbyincludingnon-ghostcrewcolumns.
Hencetheratioofpassiveusedbecomesconstant.
0.2
0.250.3
0.350.4
0.450.5
0.550.6
0.65
00.
51
1.5
22.
53
Ratio between passive flight used and total number of open flights covered
Gho
stcr
ew c
ost d
iffer
ence
Gho
stcr
ew w
eigh
ts: P
assi
ve u
sed
1 2 3 8 16
Figure7.13:Ratiobetweenpassive�ightsusedandopen�ights
coveredversusdi�erencebetweenghostcrewcostandproblem
ghostcrewcost.
7.2.3
Pairingcostweights
Anothermeanofcontrollingthesolutionprocessistheweightsusedin
thecostfunction(describedinsection5.1.5).Thetwomostcorrelated
weightsaretheproblem
weightandthepassiveweight;ifonewantsto
covermanyproblem�ightsonehastopayapricewhichusuallyincreases
theratioofpassive�ightsused.Firstly,theproblem
andpassiveweights
willbeexaminedfollowedbyanexaminationoftheutilizationweightand
thecrewcoverweight.
7.2
Modelparameters
6
Astestdatasnapshots1and5areusedandthenumbersreportedarea
averageoverthetwo.
Problem
andpassiveweights
On�gure7.14theratiobetweenproblem�ightscoveredandtotalnumbe
ofopen�ightscoveredisplottedversusproblem
weightfor�vedi�eren
choicesofpassiveweight.Asexpectedtheratioofproblem�ightscovere
increasesastheproblem�ightweightincreases.
0.32
0.33
0.34
0.35
0.36
0.37
0.38
0.390.
4
0.41
0.42
01
24
8
Ratio between problem flights covered and number of open flighst covered
Pro
blem
flig
ht w
eigh
t
Cos
t fun
ctio
n w
eigt
hs: P
robl
em fl
ight
s
0 1 2 4 8
Figure7.14:Ratiobetweenproblem
�ightscoveredandopen
�ightscoveredversusproblem
�ightsweight.For�vedi�erent
passiveweights.
On�gure7.15theuseofpassive�ightsisplottedversustheproblemweigh
for�vechoicesofpassiveweight.Firstly,itisnoticedthatasmallover
alldecreaseintheratioofpassiveusedcanbeobservedastheproblem
�ightweightincreases.Onemightexpectthattheuseofpassive�ight
wouldincreaseasmoreandmoreproblem
�ightsarecovered.However,

7.2
Modelparameters
61
decreaseinthenumberofopen�ightscoveredastheproblem�ightweight
increases(asshownon�gure7.16)dominatestheuseofpassive�ights.
Therefore,aslightdecreaseisobservedon�gure7.15.Itisalsonotedthat
the�vehorizontallinesare(roughlyspeaking)nicelydistributedaccord-
ingthetheirpassiveweight.Thetopmost,solidlinerepresentsthelowest
passiveweightof0andresultsinthehighestuseofpassive.Asthepassive
weightisincreasedforeachline,thecorrespondinguseofpassivedrops.
0.350.4
0.450.5
0.550.6
0.650.7
01
24
8
Ratio between passive used and flights covered
Pro
blem
flig
ht w
eigh
t
Cos
t fun
ctio
n w
eigt
hs: P
assi
ve u
se
0 1 2 4 8
Figure7.15:Ratiobetweenpassive�ightsusedand�ightscov-
eredversusproblem
�ightsweight.
For�vedi�erentpassive
weights.
On�gure7.16theratiobetweenopen�ightscoveredandthetotalnumber
ofopen�ightsisplottedversusproblem
�ightsweight.Theplotshows
howtheratioofcovered�ightsdecreaseastheproblem
�ightweightin-
creases.Sincecolumnsthatcoversnoorjustafewproblem
�ightsare
punishedharderandharderastheproblem�ightsweightincreases,itbe-
comesmoreandmoredesirabletocoverthecorrespondingrowsbyeither
usingothernon-ghostcrewcolumnsthatcoversmanyproblem�ights,orto
useghostcrew.Astheghostcrewcostsarekeptconstant,ahugedecrease
7.2
Modelparameters
6
inopen�ightcoverageisobservedforlargevaluesoftheproblem
�ight
weight.Atthispointonlythenon-ghostcrewcolumnsthatcoveralarg
numberofproblem
�ightshaveacostthatislowenoughtobeinclude
intothesolution.
Thecurrentsectiondescribesoneofthetwopossiblewaysthesolutionpro
cesscanbeguided,namely,byadjustingtheweightsintheobjectfunctio
(costfunction).Thepreviouschaptershowedtheotherwaybyadjustin
thecostofghostcrewcolumns.Aninterestingcomparisoncanbemodebe
tween�gure7.16and�gure7.12bothshowinghowtheratioofopen�ight
coveredisa�ectedbyadjustingeitherproblem�ightsweightorghostcrew
cost.Withaninitiallowproblem�ightweight(on�gure7.16)around90%
oftheopen�ightsarecovered.Atthispointthecostofnon-ghostcrew
columnsissolowthatitisalwaysdesirabletoincludethemintothesolu
tion.Anotherwayofobtainingapproximatelythesamee�ectistomak
thecostofghostcrew
columnshigh,whichisillustratedon�gure7.12
withahighghostcrewcolumncostaopen�ightcoverageofaround87%i
achieved.

7.2
Modelparameters
63
0.450.5
0.550.6
0.650.7
0.750.8
0.850.9
0.95
01
24
8
Ratio between open flights covered and total number of open flights
Pro
blem
flig
ht w
eigh
t
Cos
t fun
ctio
n w
eigt
hs: F
light
s co
vere
d
0 1 2 4 8
Figure7.16:Ratiobetweenopen�ightscoveredandtotalnumber
ofopen�ightsversusproblem
�ightsweight.For�vedi�erent
passiveweights.
Utilizationweight
Theutilizationweightisusedtocontrol�howwell�pairings�tintothe
resourceperiodstheyareintendedfor.On�gure7.17thein�uencefrom
theutilizationweightontheopen�ightcoverageisshown.Asexpected
thecoveragedecreasesastheutilizationweightincreases,sincethecostis
increasedfornon-ghostcrewcolumnswhich��ts�purelyintotheresource
periodstheyareintendedfor.Henceitbecomesmorepro�tabletouse
non-ghostcrewcolumnsthathaveagoodutilizationoftheircorresponding
resourceperiodsortouseaghostcrewcolumn.
Accordingly,theuseofpassivedecreaseswhichisshownon�gure7.18.
7.2
Modelparameters
6
0.5
0.550.6
0.650.7
0.750.8
0.850.9
0.95
01
24
8
Ratio between open flights coverd and total number of open flights
Util
izat
ion
cost
wei
ght
Util
izat
ion:
Ope
n fli
gth
cove
rage
Figure7.17:Ratiobetweenopen�ightscoveredandtotalnumber
ofopen�ightsversustheutilizationweight.
0.350.4
0.450.5
0.550.6
0.65
01
24
8Ratio between passive flights used and open flights covered
Util
izat
ion
cost
wei
ght
Util
izat
ion:
Pas
sive
use
d
Figure7.18:Ratiobetweenpassive�ightsusedandnumberof
open�ightscoveredversustheutilizationweight.

7.2
Modelparameters
65
Crew
coverweight
Thecrewcoverweightpunishesthosepairingswhichcoveropen�ightswith
ahighcrewcover(asdescribedinsection5.1.5).Asthecrewcoverweight
isincreasedtheopen�ightscoveragedecreasesasitgetsmoreandmore
pro�tabletouseghostcrewcolumns.Thisisshownon�gure7.19.
0.81
0.82
0.83
0.84
0.85
0.86
0.87
0.88
0.890.9
01
24
8
Ratio between open flights coverd and total number of open flights
Cre
w c
over
cos
t wei
ght
Cre
w c
over
: Ope
n fli
ght c
over
age
Figure7.19:Ratiobetweenopen�ightscoveredandtotalnumber
ofopen�ightsversusthecrewcoverweight.
On�gure7.20thecorrespondinguseofpassiveisshown.Theuseincreases
becausethe�ightsthatbecomesmorepro�tabletocoveraretheones
withalow
crew
cover,whichoftenare�ightswhicharehardtocover
(oftenproblem�ights).Thisisillustratedon�gure7.21wheretheratioof
problem�ightscoveredareplotted.Hereasmallincreaseisobserved.
7.2
Modelparameters
6
0.450.5
0.550.6
0.650.7
0.75
01
24
8
Ratio between passive flights used and open flights covered
Cre
w c
over
cos
t wei
ght
Cre
w c
over
: Pas
sive
use
d
Figure7.20:Ratiobetweenpassive�ightsusedandnumberof
open�ightscoveredversusthecrewcoverweight.
0.34
0.34
5
0.35
0.35
5
0.36
0.36
5
0.37
0.37
5
01
24
8Ratio between problem flights covered and number of open flights covered
Cre
w c
over
cos
t wei
ght
Cre
w c
over
: Pro
blem
flig
ht c
over
age
Figure7.21:Ratiobetweenproblem
�ightscoveredandnumber
ofopen�ightscoveredversusthecrewcoverweight.

7.2
Modelparameters
67
7.2.4
Boundingthedepth�rstsearch
Duringthe�rstfewpilotexperimentsitbecameclearthatthesearchtree
hadtobeboundedmoreaggressivelythandescribedinthepseudocode(see
table5.1).Heretheboundingismadebyensuringtimeanddestination
matchandbyuseofthelegalitycheckingutility.However,thisdoesnot
provideane�cientlimitationofthesearchtree.Belowthenewbounds
areintroducedandtested.
Afterafew
pilotexperimentsitturnedoutthatforsomesearchtrees
severalhundredofthousandnodeswhereexplored,whichbecomesvery
timeconsuming.Asimplesolutionisanupperboundonthenumberof
searchnodestoexplore,below
calledM1.Anotheridea,whichalsois
basedonobservationsfrom
thepilotexperiments,isanupperboundon
thenumberofnodestoexplorewithoutanygenerationoflegalpairings,
below
calledM2.Forsomecrew
ahugenumberofnodesareexplored
withoutanysuccessfulpairinggeneration.Thereasonbeingthata�full�
legalitycheckcannotbecarriedoutbeforeacompletepairinghasbeen
constructed.Sincethenodesinthesearchtree(besidestheleaf-nodes)are
allpartialtheyarenotlegalbecausetheyarenotbalanced.Thereforeonly
alimitedlegalitycheckcanbeusedandtheviolationoftherulesetfor
somepairingswill�rstbediscoveredwhentheybecomebalanced.
Thetesthasbeencarriedoutonsnapshots1and5andtheresultsarethe
averageoverthesetwosnapshots.
On�gure7.22thein�uenceonthesolutiontimefrom
thechoicesofM1
andM2
areshown.ThedecisivefactorforthesolutiontimeisclearlyM1;
thechoiceofM2
hasnosigni�cantin�uenceontheoverallrunningtime.
7.2
Modelparameters
6
0
2000
4000
6000
8000
1000
0
1200
0
1400
0
1600
0
1800
0
2000
0 1000
050
000
7500
010
0000
1500
00
Solution time (seconds)
Max
imum
num
ber
of n
odes
Bou
ndin
g de
pth-
first
sea
rch:
Sol
utio
n tim
e
100
1000
1000
0
Figure7.22:SolutiontimeversusM1
forthreedi�erentchoicesofM2.
Togetacorrespondingmeasureofthein�uenceonthesolutionqualityth
solutioncostisplottedon�gure7.23andtheratioofopen�ightscovere
inthe�nalsolutionisplottedon�gure7.24.

7.2
Modelparameters
69
250
300
350
400
450 10
000
5000
075
000
1000
0015
0000
Cost
Max
imum
num
ber
of n
odes
Bou
ndin
g de
pth-
first
sea
rch:
Sol
utio
n co
st
100
1000
1000
0
Figure7.23:SolutioncostversusM1
for3di�erentchoicesofM2.
Again,themostsigni�cantfactorseemtobeM1.However,choosingahigh
valueofM2
=10000allowforasmallerchoiceofM1
=75000.Thismight
beinterpretedasfollows;byincreasingM1
youclearlygeneratemorepair-
ingsallowingforabettersolutiontotheSetCoveringproblem.However,
loweringthevalueofM1
mightbecompensatedbyincreasingthevalueof
M2.Now,insteadofgeneratingmanypairingsforsomecrew,severalother
crewwhichwasearliercuto�byM2
nowhaspairingsgenerated.
Anothermeasureofthesolutionqualityistherationofopen�ightscovered,
whichisplottedon�gure7.24.Theplotcorrespondswellwith�gure7.23;
aroundM1
=75000theplotseemto�attenoutespeciallyforthetwohigh
choicesofM2.
7.2
Modelparameters
7
0.72
0.74
0.76
0.780.
8
0.82
0.84
0.86
0.880.
9 1000
050
000
7500
010
0000
1500
00
Ratio of open flights covered
Max
imum
num
ber
of n
odes
Bou
ndin
g de
pth-
first
sea
rch:
Ope
n fli
ghts
cov
ered
100
1000
1000
0
Figure7.24:Ratioofopen�ightscoveredin�nalsolutionversus
M1
forthreedi�erentchoicesofM2.
7.2.5
Searchfrontlengthfordepth-best�rstsearch
Theimportantparameterwhenusingdepth-best�rstsearchisthelengt
LSF
ofthesearchfront.ThesearchislimitedtotheLSF-bestateachnode
AsmallvalueofLSF
willresultinaverygreedysearchthatonlyexplore
thecurrentlybestpartialpairingstherebyloweringthesolutionqualit
notable.OntheotherhandalargevalueofLSF
willcausethesearcht
exploreclosetoallsuccessorsofagivennodemakingthesearchaplai
(unbounded)depth�rstsearchandloosingthedesiredperformancegain
On�gure7.25thein�uencefrom
LSF
ontherunningtimeisshown.A
onewouldexpecttherunningtimeincreaseswithLSF;moreandmor
nodesareexplored.

7.2
Modelparameters
71
0
1000
0
2000
0
3000
0
4000
0
5000
0
6000
0
7000
0
8000
0
9000
0
1000
00
13
57
915
2050
Solution time in secounds
Sea
rchf
ront
leng
th
Bes
t-de
pth
first
: Sol
utio
n tim
e se
arch
fron
t len
gth
Figure7.25:Depth-best�rstsearch;solutiontimeinsecondsversusLSF.
Figure7.26showshowthesolutionvalueisa�ectedbyLSF.Asexpected
ahugegaininsolutionqualityisobtainedasLSF
increasesupto20.For
LSF
>20thesolutionqualityisnotimprovedmuchwhenLSF
isincreased.
7.2
Modelparameters
7
150
200
250
300
350
400
450
500
550
600
13
57
915
2050
Sol
utio
n va
lue
Bes
t-de
pth
first
: Sol
utio
n va
lue
vs. s
earc
hfro
nt le
ngth
Figure7.26:Depth-best�rstsearch;solutionvalueversusLSF.
Anotherimportantmeasureforthesolutionqualityisthenumberofope
�ightswhicharecoveredinthe�nalsolution.Thereforethenumbero
open�ightscoveredversusLSF
isplottedon�gure7.27.Againtheplo
behavesasexpected;forLSF
>20thegraphlevelsout.

7.3
Performancetests
73
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.91
13
57
915
2050
Covered flights
Sea
rchf
ront
leng
th
Bes
t-de
pth
first
: No.
cov
ered
flig
hts
vs. s
earc
hfro
nt le
ngth
Figure7.27:depth-best�rstsearch.Numberofcoveredopen
�ightsin�nalsolutionversusLSF.
AsindicatedaboveavalueofLSF
=
20showstobeappropriate.Here
timesavingsareachievedwithouta�ectingthesolutionqualitynotable.
7.3
Performancetests
Inthissectionacomparisonofthedi�erentheuristicsdevelopedwillbe
carriedout,alongwithacomparisontheseagainstsig'sparinggeneration
mode1(asdescribedinsection4.1.3).
Usingsig'sparinggeneratorinsteadofoneofthedevelopedheuristicsis
easy:Firstly,sig'sgeneratorisusedtogeneratepairingsfrom
theopen
�ights.Secondly,foreachcrewthesubsetofthegeneratedpairingsthat
shemightmanareidenti�ed.Thisestablishesasituationsimilartothe
oneobtainedfromtheothergenerationheuristics.Hence,theSetCovering
Problemcanbeinitializedandsolvedasifoneoftheotherheuristicshad
beenused.
7.3
Performancetests
7
Belowabbreviationsforthedi�erentpairinggenerationheuristicswillb
used.Thesearegivenintable7.5.
Pairinggenerationheuristic
Abbreviation
Depth�rstsearch
dfs
Depth-best�rstsearch
dbfs
sig'spairinggenerationmode1
sig1
Depth�rstsearchwithpreprocessing
pre
Table7.5:Heuristicsandcorrespondingabbreviation.
7.3.1
Searchingfrom
�middleandout�
Thelastheuristicdescribedinchapter5wasthesearchingfrom�themid
dleandout�asitwasdescribedinsection5.1.6.However,thisheuristi
willnotbetestedanyfurtherinthischapter,duetothefact,thatthecur
rentsetupisnotsu�cient.Theheuristicstriestobuildapairinggiven
partialpairing,butinthecurrentsetupnoappropriatewayofchoosingo
constructingthispartialpairingisavailable.Asmallnumberofpilottest
havebeencarriedout,wheretheproblem�ightshavebeenusedasstartin
points.However,thisapproachproducesthesamepairingsoverandove
againandsomekindofpre-pairinghastobeintroducedtoproducesom
appropriatestartingpointsforthisheuristic.
7.3.2
d
fs
versusd
bfs
Inthissectiondfsanddbfswillbecompared.Forthelargersnapshots
lengthofLSF
=20isnotsu�cienttoboundthesearchtree:Itbecome
tootimeconsumingandforsomeofthesnapshots,thememorylimito
1GBisexceeded.Therefore,thetwoboundsintroducedforthedfsar
alsoappliedtothedbfs.TheparametersusedareLSF
=20,M1
=5000
andM1
=10000.HoweverforthedfsachoiceofM1
=25000hasbee
necessaryformostofthelargesnapshots(10,11,12,14,15and16)simpl
tostaybelowthe1GBmemorylimit.
On�gure7.28theopen�ightcoverageiscomparedfordfsanddbfs
Theexpectedgaininsolutionqualitydonotseemtoappear;onlyasma

7.3
Performancetests
75
improvementisseenforthelargeshots,however,dfshasbeenrunwith
alowervalueofM1.Hencetheobservedgainisevenlessimpressive.For
thesmallshotsdbfsperformsworsethandfs.
A100%�ightcoverageisnotexpectedsinceafractionoftheopen�ights
lieclosetoeitherthestartortheendofthesnapshot.Such�ightsmaybe
impossibletocovergiventhechosentimeinterval.
0.550.6
0.650.7
0.750.8
0.850.9
0.951
12
34
56
78
910
1112
1314
1516
Ration between open flights covered and total number of open flights
Sna
psho
t
DF
S v
s. D
BF
S: O
pen
fligh
ts c
over
age
DB
FS
DF
S
Figure7.28:dfsversusdbfs;theplotshowstheratiobetween
open�ightscoveredandtotalnumberofopen�ightsforthe16
snapshots.
On�gure7.29thesolutiontimeforthetwoheuristicsisshown.Forthe
largesnapshotsacomparisonishardtocarryoutsincethelowervalueof
M1
hasbeenusedfordfs.Hence,thebigdi�erenceinsolutiontimeisseen
forsnapshots10andabove.Forthesmallshotsitseemsliketheoverhead
introducedbysortingthesearchfrontislargerthanthegainobtainedby
boundingthesearchfront.
7.3
Performancetests
7
0
5000
1000
0
1500
0
2000
0
2500
0
3000
0
3500
0
4000
0
4500
0
5000
0
5500
0
12
34
56
78
910
1112
1314
1516
Solution time
Sna
psho
t
DF
S v
s. D
BF
S: S
olut
ion
time
DB
FS
DF
S
Figure7.29:dfsversusdbfs;solutiontimeversussnapshot
number.40000seconds�
11hours.
Theuseofpassive�ightsisshownon�gure7.30.Roughlyspeaking
loweruseofpassive�ightscanbeobservedforthedbfsthanthedfs
Thisseemsreasonablesincetheuseofpassiveisrepresentedinthecos
function.Hence,thedbfsexplorenodes,whichrepresentsalowuseo
passivebeforenodesrepresentingahighuseofpassive.

7.3
Performancetests
77
0.4
0.450.5
0.550.6
0.65
12
34
56
78
910
1112
1314
1516
Solution time
Sna
psho
t
DF
S v
s. D
BF
S: P
assi
e us
e
DB
FS
DF
S
Figure7.30:dfsversusdbfs;ratiobetweenpassiveuseand
numberopen�ightscoveredversussnapshotnumber.
Theabovetestsshows,thatthedbfsdoesnotgivethequalityimprovement
inthesolutiontobeexpected.Themainreasonforthisbeingthatthe
costfunctionhasbeenconstructedwithafullpairinginmind.Anexample
couldbe:Apartialpairingwhich(atthestartofthesearchtree)consistof
apassive�ightonlywouldbepunishedhardbythecostfunction.Itmight
notevenbeexplored,eventhoughthispartialpairingmightturnoutto
bepartofa�good�fullpairing.
7.3.3
d
bfs
versussig
1
On�gure7.31theopen�ightcoverageiscomparedforthedbfsandsig1
heuristics.Asitcanbeseen,thedbfsresultsinanotablyhighercoverage
comparedwiththesig1.Onlyforonesnapshot,number14,thesig1results
inahigheropen�ightcoverage.Asshownintable7.4snapshot14contains
thehighestnumberofopen�ightswhichmayexplainthepoorperformance.
Thisbehaviourisalsoobservedforsnapshot10whichcontainsthethird
7.3
Performancetests
7
highestnumberofopen�ights.Thereasonbeingthatthedbfsisbounded
ifthenumberofopen�ightsarelarge,largersearchtreeshavetobebuil
toincludemore�ights.However,thisispermittedbythebounds.
0.450.5
0.550.
6
0.650.
7
0.750.
8
0.850.
9
0.951
12
34
56
78
910
1112
1314
1516
Ration between open flights covered and total number of open flights
Sna
psho
t
DB
FS
vs.
SIG
1: O
pen
fligh
ts c
over
age
DB
FS
SIG
1
Figure7.31:dbfsversussig1pairinggenerationmode1;the
plotshowstheratiobetweenopen�ightscoveredandtotalnum-
berofopen�ightsforthe16snapshots.
Asmallincreaseinthecoverageforsig1canalsobeobservedasthesnap
shotnumberincreases.Asthesnapshotnumberincreases,thesizeofth
snapshotmeasuredintimeintervalalsoincrease.Asshowninsection7.1
thenumberoflargeresourceintervalsincreasesasthetimeintervalin
creases.Sosig1performancebetteronsnapshotswheretheresourcesar
lessfragmentedratherthanones,whereresourcesaremorefragmented
Thisisalsoconsistentwiththedescriptiongiveninchapter4:Theprob
lemwithsig1was,thatthepairingsgeneratedwastolongto�tthesma
fragmentedresources.
Bothsnapshot9and13,whicharetakenjust2daysbeforeoperation
resultsinhighcoverageforthedbfs.Atthispoint,resourcesarever
fragmentedandthetailoringofpairingsseemstopayo�.

7.3
Performancetests
79
Twomainpricesarepayedforthegainedcoverage:Firstly,therunningof
sig1canbecarriedoutinafewminuteswhilethedbfsrunsforseveral
hours.Thisisshownon�gure7.32.Forthetwosnapshotgivingalow
coverage,thesolutiontimeiscorrespondinglow.Thisiscausedbyalow
solutiontimefortheSetCoveringProblem:Sincetheshotscontainsmany
open�ights,theintroducedboundsresultsinfewergenerationsoflegal
pairings,whichagainresultinasmallerSetCoveringProblem,whichcan
besolvedfasterbutwithaworseresult.
0
1000
0
2000
0
3000
0
4000
0
5000
0
6000
0
12
34
56
78
910
1112
1314
1516
Solution time
Sna
psho
t
DB
FS
vs.
SIG
1: S
olut
ion
time
DB
FS
SIG
1
Figure7.32:dbfsversussig1pairinggenerationmode1;solu-
tiontimeversussnapshotnumber.40000seconds�
11hours.
Duetothebigdi�erenceinrunningtimesig1onlyappearsas
astraightlinejustabovethex-axes.
Secondly,theuseofpassiveisalsoincreasedwhichisshownon�gure7.33.
Thismightbecausedbydbfscoveringmoreproblem�ights,whichwould
requireahigheruseofpassive.Thus,on�gure7.34theproblem
�ight
coverageisshownforthetwoheuristics.Asitcanbeseen,anotable
higherproblemcoverageisobservedforthedbfs.
7.3
Performancetests
8
0.2
0.22
0.24
0.26
0.280.
3
0.32
0.34
0.36
0.38
12
34
56
78
910
1112
1314
1516
Ratio between passive used and number of open flights covered
Sna
psho
t
DB
FS
vs.
SIG
1: P
assi
e us
e
DB
FS
SIG
1
Figure7.33:dbfsversussig1pairinggenerationmode1;ratio
betweenpassiveuseandnumberofopen�ightscoveredversus
snapshotnumber.

7.4
Preprocessing
81
0.150.2
0.250.3
0.350.4
0.450.5
0.550.6
0.65
12
34
56
78
910
1112
1314
1516
Ratio between number of problem flights covered and number of open flights covered
Sna
psho
t
DB
FS
vs.
SIG
1: P
robl
em c
over
age
DB
FS
SIG
1
Figure7.34:dbfsversussig1pairinggenerationmode1;ratio
betweenproblem�ightscoveredandnumberopen�ightscovered
versussnapshotnumber.
7.4
Preprocessing
Asseenabove,oneofthemajorlimitationsbyusingtheheuristicsisthe
runningtime.Asa�rstattemptthishasbeentargetedbyintroducinga
preprocessingoftheopen�ightsasdescribedinsection5.1.7.Theresults
aredescribedbelow.
On�gure7.35theopen�ightscoverageisshownforthefourdescribed
heuristics.Ascanbeseentheintroducingofpreprocessingincreasesthe
open�ightscoverageforthelargesnapshots.Thepreprocessingreducesthe
searchspacebyexcludingallnon-legalconnectionsfromthesearch.Thus,
morenodescanbeinvestigatedandmorelegalpairingscanbegenerated
resultinginbettersolutionstotheSetCoveringProblem.
7.4
Preprocessing
8
0.450.5
0.550.
6
0.650.
7
0.750.
8
0.850.
9
0.951
12
34
56
78
910
1112
1314
1516
Ration between open flights covered and total number of open flights
Sna
psho
t
Com
bine
d te
st: O
pen
fligh
ts c
over
age
PD
FS
DB
FS
DF
SS
IG1
Figure7.35:Open�ightscoverageversussnapshotnumberfor
thefourheuristics.
Thesolutiontimeisshownon�gure7.36.Inthis�gureanotableimprove
mentcanbeseen;preterminatesbefore20000seconds(=5.5hours)fo
allsnapshotsexceptshot10,whichisjustabove20000seconds.Compare
withasolutiontimeforsomeofthelargesnapshotsofabove11hoursfo
thedbfsthisresultmustbeconsideredsatisfying.NotethatM1
hasbee
furtherloweredfordfsonthelargesnapshotsasdescribedearlier.Hence
arelativelysmallsolutiontimeisobservedforsnapshotsnumberslarge
than10.

7.4
Preprocessing
83
0
1000
0
2000
0
3000
0
4000
0
5000
0
6000
0
12
34
56
78
910
1112
1314
1516
Solution time in seconds
Sna
psho
t
Com
bine
d te
st: S
olut
ion
time
PD
FS
DB
FS
DF
SS
IG1
Figure7.36:Solutiontimeversussnapshotnumberforthefour
heuristics.
Theratiobetweenthetimeusedforgeneratingpairingsandthetotalso-
lutiontimeisshownon�gure7.37.Asitcanbeseendfsusesabove90%
ofthetimegeneratingpairingsandthuslessthan10%ofthetimesolving
theSetCoveringProblem.pre�ontheotherhand�usesaround65%of
thetimegeneratingpairingsandthus45%
ofthetimeisusedforsolving
theSetCoveringProblem.Asitwasshownon�gure7.36dfsandpre
hadapproximatelythesamesolutiontimeforthelargesnapshots,hence,
thenumbersarecomparable.dfsusesalargeperiodoftimegenerating
pairings,howevertheresultingSetCoveringProblem
issolvedfastwith
poorresults(asearliershown).Thisismainlycausedbythesizeofthe
SetCoveringProblem
whichfortheprebecomesaround150000columns
forsomeofthelargesnapshots,whiledfsonlyresultsinSetCovering
Problemsofsizesaround30000columns.
7.4
Preprocessing
8
0.550.6
0.650.
7
0.750.
8
0.850.
9
0.951
12
34
56
78
910
1112
1314
1516
Ration between pairing generation and total solution time
Sna
psho
t
Com
bine
d te
st: P
airin
g ge
nera
tion
gene
ratio
n
PD
FS
DF
S
Figure7.37:RatiobetweentimeusedsolvingtheSetCover-
ingProblem
andtimeusedgenerationpairingsversussnapshot
numberforpreanddfs.
Lookingattheuseofpassive,asmallimprovementcanbeseenon�gur
7.38,whichshowstheratiobetweennumberofpassiveusedandnumbe
ofcovered�ights.Againtheimprovementmustbeascribedtothemor
exhaustiveexplorationofthesearchtree.

7.4
Preprocessing
85
0.150.2
0.250.3
0.350.4
0.450.5
0.550.6
0.65
12
34
56
78
910
1112
1314
1516
Ratio between passive use and number of open flights covered
Sna
psho
t
Com
bine
d te
st: P
assi
ve u
se
PD
FS
DB
FS
DF
SS
IG1
Figure7.38:Ratiobetweenpassiveandnumberofopen�ights
coveredversussnapshotnumberforthefourheuristics.
Toillustratethecorrespondingimpactontheproblem�ightcoverage,the
problem
�ightcoverageversussnapshotnumberisplottedon�gure7.39.
Hereitisseen,thattheproblem
�ightscoverageisnotdecreaseforthe
pre,eventhoughasmalldecreaseinpassiveusewasobservedon�gure
7.38.
7.4
Preprocessing
8
0.2
0.250.
3
0.350.
4
0.45
12
34
56
78
910
1112
1314
1516
Ratio between problem flights covered and number of open flights covered
Sna
psho
t
Com
bine
d te
st: P
robl
em c
over
age
PD
FS
DB
FS
DF
SS
IG1
Figure7.39:Ratiobetweenproblem
�ightscoveredandnum-
berofopen�ightscoveredversussnapshotnumberforthefour
heuristics.

87
Chapter8
Conclusion
Themaingoalofthisprojecthasbeentoconstruct,implementandtesta
solutionapproachfortheairlinecrewschedulingproblemduringthetrack-
ingphase,withthestartingpointofthesoftwarecurrentlyusedbysas.
Inaddition,a�creworiented�approachshouldbetested,whereknowledge
abouttheavailabilityofcrew,which,atsomepointinthefuturemight
manapairing,shouldbeusedduringthegenerationofthepairing.
A
review
oftheliteratureshowed,thatthe(published)modelsdealing
withthetrackingandday-to-dayphasesmostlyusesa�crew
oriented�
pairinggenerationschemecombinedwiththesolutionofaSetCovering
Problem
orSetPartitioningProblem.However,allthemodelsdescribed
wereformulatedandsolvedusingsomekindoflinearoptimizer.Dueto
theproblemsizeandthecurrentsetupgivenbysas,suchformulationand
solutionapproachwasnota�rstchoice.
Therefore,asolutionapproachusingthe�creworiented�ideaandthesolu-
tionofaSetCoveringProblemwasdevelopedwithinthegivenframework
oftheexistingsoftwareatsas.Threedi�erentpairinggenerationheuris-
ticsweresuccessfullyimplementedtogetherwithaheuristicforsolvingthe
SetCoveringProblem.Afourthgenerationheuristicwasimplementedbut
nevertestedduetoreasonsdescribedinsection7.3.1.Finally,ameasure
forthequalityofapairingwasdeveloped.
Thenumericalresultsshowedasubstantialincreaseinthenumberofopen
�ightscoveredusingthenewheuristicscomparedwiththesoftwarecur-
8.1
Outlook
8
rentlyusedbysas.
Twomainpricesarepayedforthisimprovement
Firstly,alargeincreaseintheuseofpassive�ightsisobserved.However
theincreaseinpassiveusehasonlybeencomparedwiththeresultsofsas
heuristic,whichcoveredafarsmallernumberofopen�ights�naturally
yieldingaloweruseofpassive.Duringtheprojectanearlypersonaleva
uationfrom
sasstatedthattheuseofpassive�ights�seemedhigh�,an
unfortunately,anyfurtherevaluationhasnotbeenpossiblesofar.
Secondly,alargeincreaseintherunningtimewasobserved:Wherethesa
heuristicrunningtimecanbemeasuredinminutestherunningtimeso
theimplementedheuristicsismeasuredinhours.However,withaplannin
horizonofacoupleofdays,anightofcalculationsmightnotbetoohigh
pricetopayforanotablyimprovedsolution.A�rstattemptwasmadei
relationtoreducingtherunningtime.Thiswasdonebyintroducingsom
preprocessingtothepairinggeneration,eliminatinginfeasibleconnection
onceandforall.Hereby,anotableimprovementinsolutiontimeand
smallimprovementinsolutionqualitywereachieved.
Inaddition,apairingqualitymeasurehasbeenintroducedandtestedwit
satisfactoryresults:Itispossibletoguidethesolutionprocesssotha
certainproperties(useofpassive,problem�ightcoverage,open�ightscov
erageetc.)canbeweightedtoproducedi�erenttypesofsolutions.
8.1
Outlook
Withtheresultsofthisworkathand,athoroughevaluationoftheresult
especiallythequalityofthegeneratedpairingshouldbemadeincollabo
rationwithsas.
Inaddition,severalotherareasmightbetargetedduringfurtherwork
Firstly,areductionoftherunningtime.Oneapproach,whichhasalread
beentriedwithsuccess,wastoapplysomepreprocessing.Thiswasdon
bymakingsomegenericchoicesonceandforallinsteadofrepeatingthem
overandoveragainforeachcrew.Thepreprocessingapplieduseslegality
However,morerestrictivechoicesbasedonthearrivalanddepartingbase
of�ightsmightalsobeused.
Secondly,animprovementofthesolutionqualityshouldbetargeted.I
thegivenframework,feedbackfromthesetcoveringmodulemightbeuse
inthepairinggenerationmodule.Insteadofgeneratingalargenumbero

8.1
Outlook
89
pairingsatonce,alimitednumberofpairingcouldbegeneratedandthe
resultingSetCoveringProblemcouldbesolved.Theinformationobtained
duringthesolutionofthesetcoveringproblem
couldbeusedtogenerate
newpairings.ThesecouldbeinsertedintotheexistingSetCoveringProb-
lem,whichthencouldbereoptimized.Thiswouldresultinanalternating
processbetweengenerationandselection.Here�morphs�asdescribedin
[1]mightbeusable.
Thirdly,explorationsofatraditionalmathematicalformulationandop-
timizationusingalinearoptimizermightprovevaluable.Eventhough
suchanapproachisexpectedtoresultinverylongrunningtimeforlarger
problems,itmightbeusedasareferencewhenevaluatingthedeveloped
heuristics.
Asa�nalremark,animportantrelatedproblem
cameupduringthis
project;duringthetrackingphasesasbuyssparetimefrom
crewtoclose
open�ights.However,itisnotstraightforwardtodecidewhentobuythe
sparetime,andhowmuchtobuyfromwhichcrew.Duetothedynamicna-
tureoftheproblemclosed�ightsmightbecomeopenoropen�ightsmight
becomeclosed.Asoperationapproachesbuyingsparetimefrom
crewbe-
comesmoreandmoreexpensive,makingitdesirabletobuysparetimeat
anearlypointintime.However,asoperationapproachesmoreandmore
informationbecomesavailable(passengerforecastmightdecreasethereby
loweringthenumberofcrewneededona�ight)whichmightreducethe
numberofcrewneeded.Thusmakingitpossibletobuylesssparetime,
however,atahigherprice.Hencetheproblem
ofdecidingwhentobuy
sparetimeandhowmuchtobuyisalsoimportantwhenrunninganairline
company.
9
Bibliography
[1]M.Brusco,L.Jacobs,andG.Thompson.Amorphingproceduret
supplementasimulatedannealingheuristicforcost-andcoverage
correlatedset-coveringproblems.
AnnalsofOperationsResearch
86:611�27,1999.
[2]A.Caprara,P.Toth,andM.Fischetti.Algorithmsforthesetcoverin
problem.AnnalsofOperationsResearch,98:353�71,2000.
[3]H.Dawid,J.Konig,andC.Strauss.Anenhancedrosteringmode
forairlinecrews.ComputersandOperationsResearch,28(7):671�688
2001.
[4]G.Desaulniers,J.Desrosiers,Y.Dumas,S.Marc,B.Rioux,M.M
Solomon,andF.soumis.Crewpairingatairfrance.EuropeanJourna
ofOperationalResearch,pages245�259,1997.
[5]R.J.E.Gamma,R.HelmandJ.Vlissides.DesignPatterns.Addiso
Wesley,1995.
[6]G.W.Graves,R.D.McBride,I.Gershko�,D.Anderson,an
D.Mahidhara.
Flightcrew
scheduling.
ManagementSceince
39(6):736�745,June1993.
[7]L.Lettovsky,E.Johnson,andG.Nemhauser.Airlinecrewrecovery
TransportationScience,34(4):337�48,2000.
[8]D.Levine.Applicationofahybridgeneticalgorithm
toairlinecrew
scheduling.ComputersandOperationsResearch,23(6):547�558,1996
[9]P.Lucic.Simulatedannealingforthemulti-objectiveaircrewroster
ingproblem.TransportationResearchPartA:PolicyandPractice
33(1):19�45,1999.
[10]Z.MichalewiczandD.B.Fogel.HowtoSolveIt:ModernHeuristics
Springer,2000.
[11]Analyseafyderligereomdisponeringsmulighederitap-ai,august1994
Revision:1.02.

BIBLIOGRAPHY
91
[12]C.R.Reeves.Geneticalgorithmsfortheoperationsresearcher.IN-
FORMS,9(3):231�249,1997.
[13]M.Stojkovic,F.Soumis,andJ.Desrosiers.Theoperationalairline
crewschedulingproblem.TransportationScience,32(3):232�45,1998.
[14]P.Vance,C.Barnhart,E.Johnson,andG.Nemhauser.Airlinecrew
scheduling:anewformulationanddecompositionalgorithm.Opera-
tionsResearch,45(2):188�200,1997.
[15]G.Wei,G.Wu,andM.Song.Optimizationmodelandalgorithm
forcrewmanagementduringairlineirregularoperations.Journalof
CombinatorialOptimization,1(3):305�21,1997.