robust winners and winner determination policies under candidate uncertainty joel oren, university...
TRANSCRIPT

1
Robust Winners and Winner Determination Policies under Candidate UncertaintyJOEL OREN, UNIVERSITY OF TORONTO
JOINT WORK WITH CRAIG BOUTILIER, JÉRÔME LANG AND HÉCTOR PALACIOS.

Motivation – Winner Determination under Candidate Uncertainty
•A committee, with preferences over alternatives: • Prospective projects.• Goals.
•Costly determination of availabilities:•Market research for determining the
feasibility of a project: engineering estimates, surveys, focus groups, etc.
• “Best” alternative depends on available ones.
2
a
b
c
4 voters 3 voters 2 voters
a
b
c
b
c
a
c
a
b
Winnera
?
? ?
c
≻≻ ≻
≻
≻≻
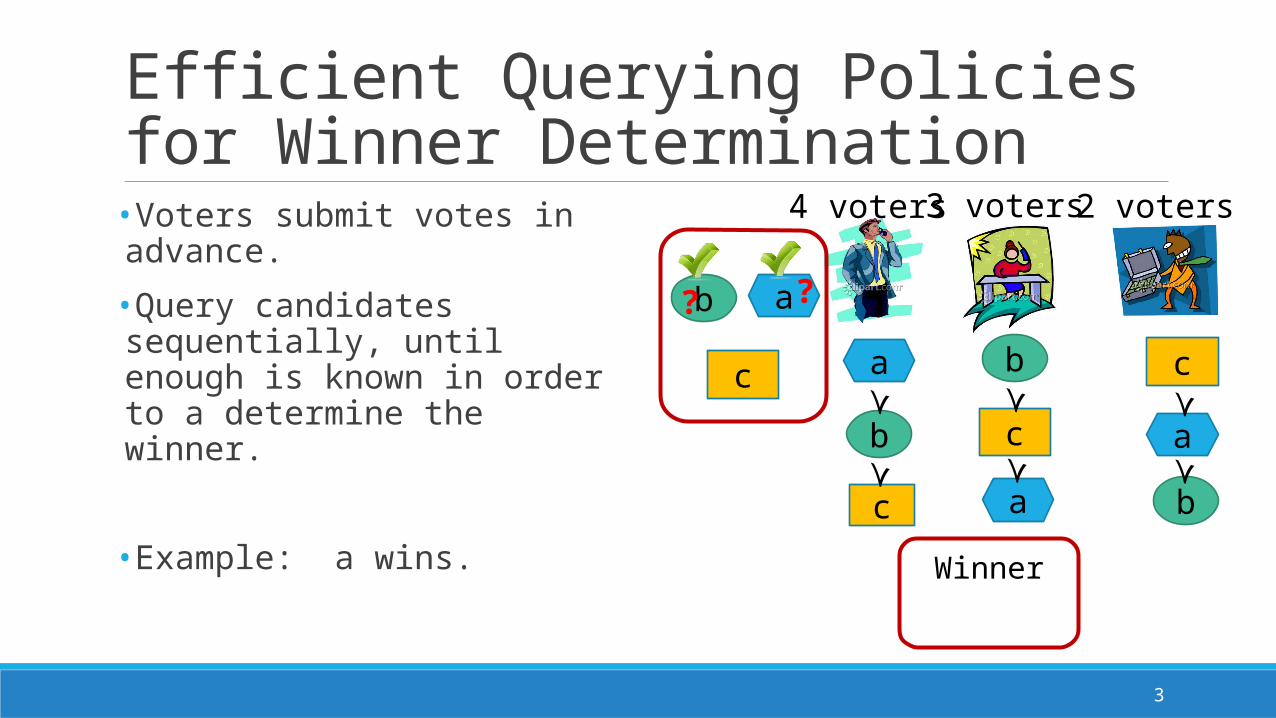
Efficient Querying Policies for Winner Determination•Voters submit votes in advance.
•Query candidates sequentially, until enough is known in order to a determine the winner.
•Example: a wins.
a
b
c
4 voters 3 voters 2 voters
a
b
c
b
c
a
c
a
b
Winner
? ?
3
≻≻ ≻≻ ≻
≻
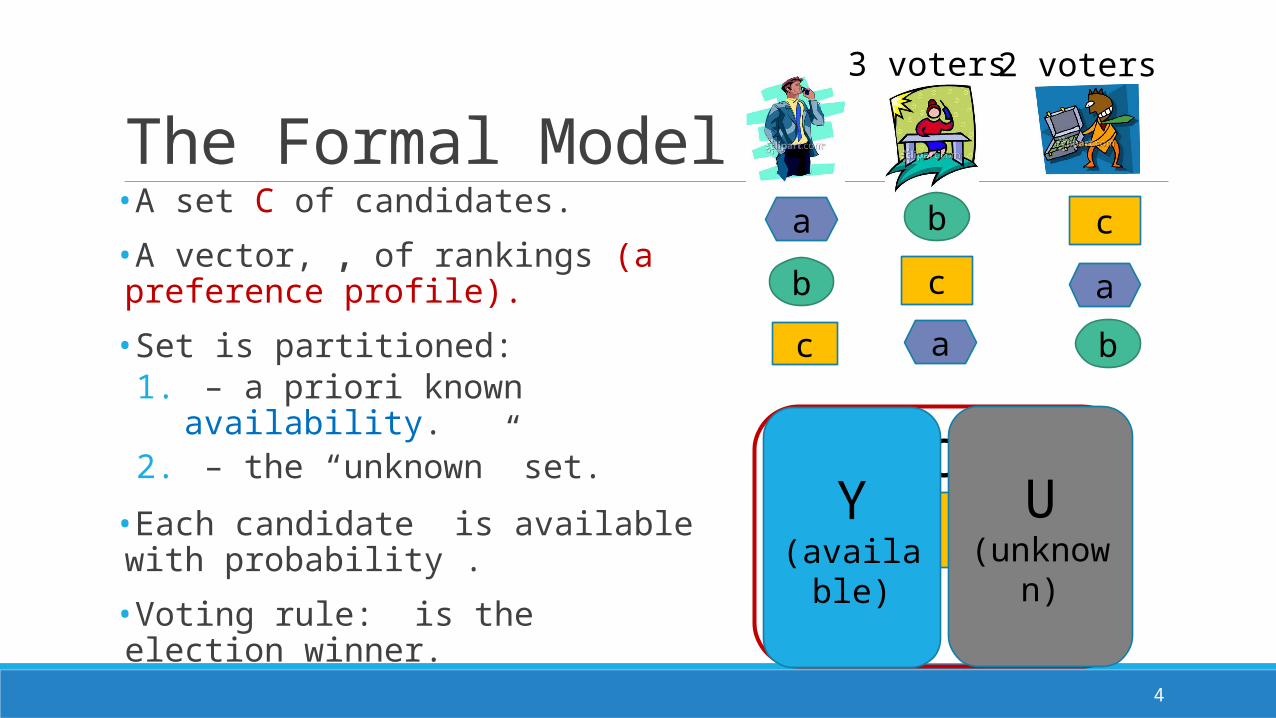
The Formal Model•A set C of candidates.
•A vector, , of rankings (a preference profile).
•Set is partitioned:1. – a priori known availability.2. – the “unknown” set.
•Each candidate is available with probability .
•Voting rule: is the election winner.ac
Cb
⋮⋮ ⋮
b
3 voters 2 voters
a
c
b
c
a
c
a
b
Y(available)
U(unknown)
4

Querying & Decision Making•At iteration submit query q(x), .
•Information set .
•Initial available set .
•Upon querying candidate :• If available: add to .• If unavailable: remove from .
• – restriction of pref. profile to the candidate set .
•Stop when is -sufficient – no additional querying will change – the “robust” winner.
ac
Cb
b
3 voters 2 voters
a
c
b
c
a
c
a
b
0.5 0.7 0.4
?
𝑄−
a𝑄+¿¿
b
?
5

Computing a Robust Winner•Robust winner: Given , is a robust winner if .
•A related question in voting: [Destructive control by candidate addition] Candidate set , disjoint spoiler set , pref. profile over , candidate , voting rule .• Question: is there a subset , s.t. ?
•Proposition: Candidate is a robust winner there is no destructive control against , where the spoiler set is .
Y Yx 𝑟 (𝑣 (𝑌 ) )=𝑥𝑟 (𝑣 (𝑌∪𝐷 ) )=𝑦
6

Computing a Robust Winner•Proposition: Candidate is a robust winner there is no destructive control against , where the spoiler set is .
•Implication: Pluarlity, Bucklin, ranked pairs – coNP-complete; Copeland, Maximin -polytime tractable.
•Additional results: Checking if is a robust winner for top cycle, uncovered set, and Borda can be done in polynomial time.• Top-cycle & Uncovered set: prove useful criteria for the corresponding majority
graph.
7
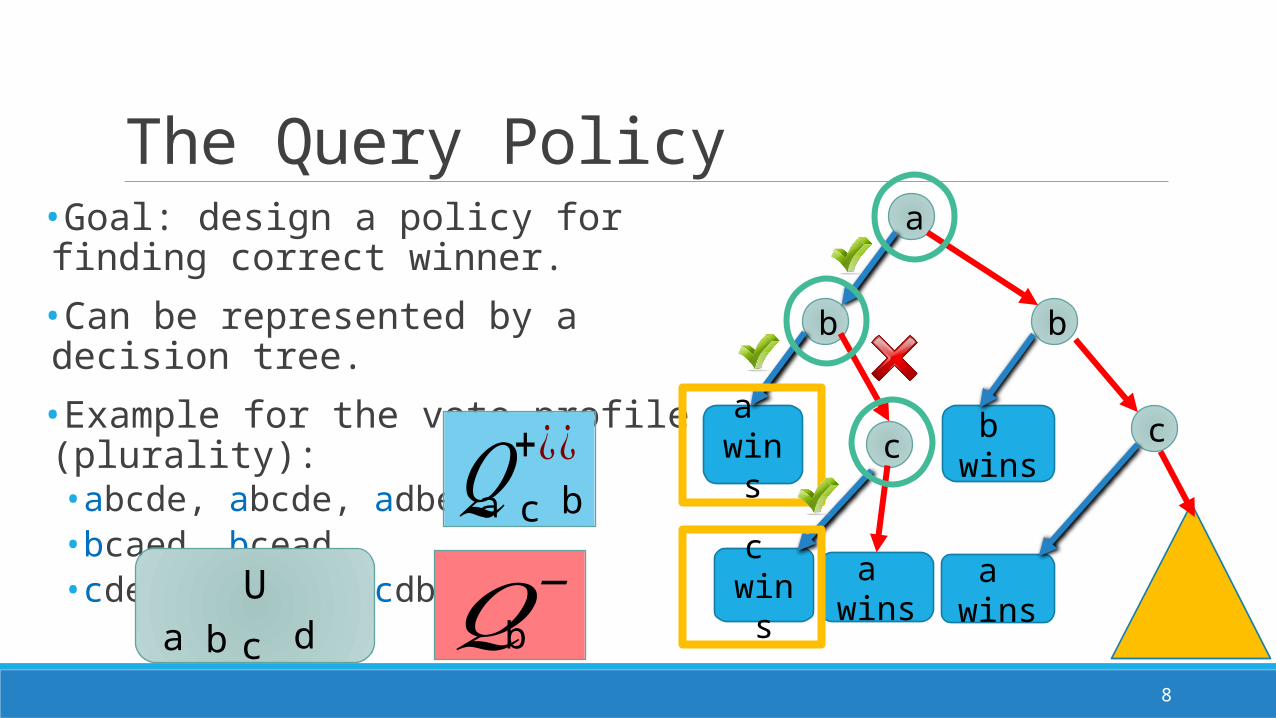
The Query Policy•Goal: design a policy for finding correct winner.
•Can be represented by a decision tree.
•Example for the vote profile (plurality):• abcde, abcde, adbec, • bcaed, bcead,• cdeab, cbade, cdbea
a
b
a wins c
c wins
a wins
b
b wins
c
a wins
Ua b c d
𝑄+¿¿
𝑄−
a b
b
c
8

Winner Determination Policies as Trees
•r-Sufficient tree:• Information set at each leaf is -sufficient.• Each leaf is correctly labelled with the winner.
• -- cost of querying candidate/node .
• – expected cost of policy, over dist. of .
a
b
a wins c
c wins
a wins
b
b wins
c
a wins
\{𝑎 ,𝑏}∈ 𝐴
9
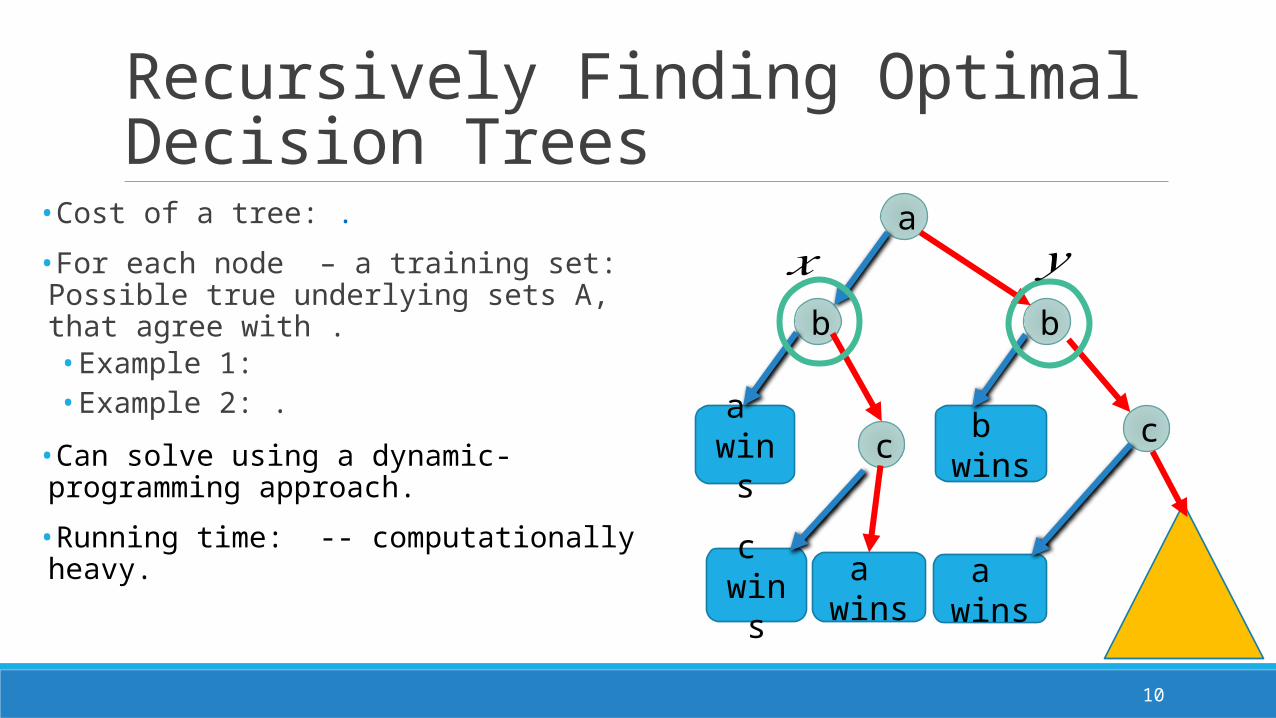
•Cost of a tree: .
•For each node – a training set: Possible true underlying sets A, that agree with .• Example 1: • Example 2: .
•Can solve using a dynamic-programming approach.
•Running time: -- computationally heavy.
a
b
a wins c
c wins
a wins
b
b wins
c
a wins
Recursively Finding Optimal Decision Trees
𝑥 𝑦
10

Myopically Constructing Decision Trees•Well-known approach of maximizing information gain at every node until reached pure training sets – leaves (C4.5).
•Mypoic step: query the candidate for the highest “information gain” (decrease in entropy of the training set).
•Running time:
11
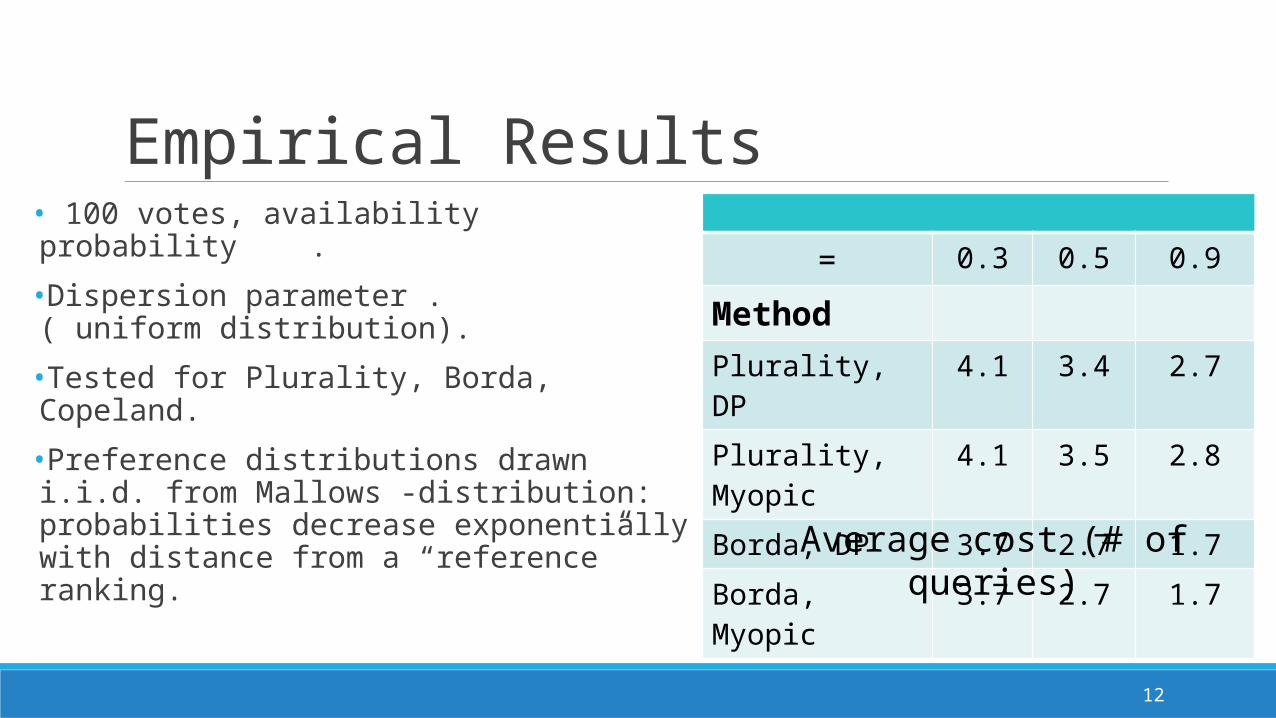
Empirical Results• 100 votes, availability probability .
•Dispersion parameter . ( uniform distribution).
•Tested for Plurality, Borda, Copeland.
•Preference distributions drawn i.i.d. from Mallows -distribution: probabilities decrease exponentially with distance from a “reference” ranking.
= 0.3 0.5 0.9MethodPlurality, DP 4.1 3.4 2.7Plurality, Myopic 4.1 3.5 2.8Borda, DP 3.7 2.7 1.7Borda, Myopic 3.7 2.7 1.7
Average cost (# of queries)
12

Empirical Results•Cost decrease as increases – [ less uncertainty about the available candidates set].
•Myopic performed very close to the OPT DP alg.
•Not shown:
•Cost increases with the dispersion parameter – “noisier”/more diverse preferences (not shown).
• -Approximation: stop the recursion when training set is – pure.• For plurality, , , .• For , .
0.3 0.5 0.9MethodPlurality, DP 4.1 3.4 2.7Plurality, Myopic 4.1 3.5 2.8Borda, DP 3.7 2.7 1.7Borda, Myopic 3.7 2.7 1.7
Average cost (# of queries)
13

Additional Results•Query complexity: expected number of queries under a worst-case preference profile.• Result: For Plurality, Borda, and Copeland, worst-case exp. query
complexity is .
•Simplified policies: Assume for all . Then there is a simple iterative query policy that is asymptotically optimal as .
14
Conclusions & Future Directions•A framework for querying candidates under a probabilistic availability model.
•Connections to control of elections.
•Two algorithms for generating decision trees: DP, Myopic.
•Future directions:1. Ways of pruning the decision trees (depend on the voting rules).2. Sample-based methods for reducing training set size.3. Deeper theoretical study of the query complexity.
15