robust regulation of a chain of power integrators perturbed by a lower-triangular vector field
TRANSCRIPT

INTERNATIONAL JOURNAL OF ROBUST AND NONLINEAR CONTROLInt. J. Robust Nonlinear Control 2000; 10:397}421
Robust regulation of a chain of power integrators perturbed bya lower-triangular vector "eld
Wei Lin*,s and Chunjiang Qian
Department of Electrical Engineering and Computer Science, Case Western Reserve University, Cleveland, OH 44106, U.S.A.
SUMMARY
A new technique called adding a power integrator is used, in a uni"ed manner, to solve a number of controlproblems including global robust stabilization, asymptotic tracking, and adaptive regulation, for a class ofuncertain nonlinear systems that are globally di!eomorphic to a chain of power integrators perturbed by anuncertain lower-triangular vector "eld. Su$cient conditions are presented under which a globally stabilizingsmooth adaptive controller and/or robust state feedback control law can be constructed explicitly, viaa Lyapunov-based inductive argument. The systematic use of the adding a power integrator techniqueallows us to remove two common hypotheses of the existing robust and adaptive control results in theliterature, that is, the controlled plant must be feedback linearizable and linear in the control input. Copyright( 2000 John Wiley & Sons, Ltd.
KEY WORDS: global stabilization; adaptive regulation; output tracking; high-order systems; uncontrollablelinearization
1. INTRODUCTION
The nonlinear control problems such as robust stabilization and adaptive regulation arisenaturally when dealing with a controlled plant which is inherently nonlinear, subject to variousuncertainties like unknown constant parameters or time-varying disturbances ranging overa known compact set. Over the past decade, with the aid of the di!erential geometric controltheory [1, 2], an important progress has been made towards the development of systematicdesign methodologies for robust and/or adaptive control of uncertain nonlinear dynamic sys-tems. Two recent books [3, 4] provide a fairly complete collection and a detailed report on thenew developments in the "elds of adaptive and robust nonlinear control.
Among several adaptive and robust control schemes available in the literature, a recursivedesign procedure known as backstepping, also called adding a linear integrator [5, 6], has been
*Correspondence to: Wei Lin, Department of Electrical Engineering, and Computer Science, Case Western ReserveUniversity, Cleveland, OH 44106, U.S.A.
sE-mail: [email protected].
Contract/grant sponsor: U.S. National Science Foundation; contract/grant number: ECS-9875273 and DMS-9972045
Copyright ( 2000 John Wiley & Sons, Ltd.

proven to be a popular design tool for adaptive and robust control of a reasonably large class ofuncertain a$ne systems, including fully feedback linearizable systems and minimum-phasenonlinear systems [3, 4, 7}11]. The use of the backstepping design has led to relaxation on thesystem nonlinearities such as boundedness, linear growth conditions, matching and extendedmatching conditions, etc., which were common requirements once in the early literature of robustand adaptive nonlinear control. For additional details in this regard, the interested reader isreferred to References [3, 4] for a comprehensive exposition.
The purpose of this paper is two-fold: to introduce a new synthesis technique called adding onepower integrator, and to use the adding a power integrator technique as a basic design tool, ina uni"ed and systematic fashion, deriving solutions to several important nonlinear controlproblems including global stabilization, asymptotic tracking, and adaptive regulation, for a classof uncertain nonlinear systems that consist of a chain of nonlinear integrators perturbed by anuncertain lower-triangular vector "eld. The basic assumptions of the existing adaptive and robustnonlinear control schemes that rely on the backstepping design are feedback linearizability andlinearity of the control input [3, 4]. With the help of the new technique of adding a powerintegrator, we remove these two common conditions and allow the nominal system to be notnecessarily feedback linearizable. In particular, neither local exponential stabilizability nor a.ne-ness property is required in the present work.
The idea of adding one power integrator and the study of its applications to global stabilizationof a lower-triangular system approximated by a chain of power integrators are primarilymotivated by the recent work [12}14], where feedback stabilization of an upper-triangularnonlinear system whose Jacobian linearization is not necessarily controllable was investigated.The system considered in the current paper can be regarded naturally as a dual system studied inReferences [12}14]. On the other hand, the results reported here also owe an inspiration froma number of research articles in the area of stabilization of lower-triangular systems or low-dimensional homogeneous systems via C0 (continuous) or C1 (continuously di+erentiable) statefeedback; see, for example, References [15}25], just to quote a few, and references therein. Thesepapers have extensively discussed, in the two or three dimensional case, necessary and su$cientconditions for the stabilization problem of homogeneous systems to be solvable via C0 or C1 statefeedback.
The paper is organized as follows: in Section 2, we "rst formulate the problems of global robuststabilization, asymptotic tracking and adaptive regulation for uncertain nonlinear systems thatare globally di!eomorphic to a chain of power integrators plus an uncertain vector "eld havinga lower-triangular structure. A set of assumptions are then introduced. Necessity of the condi-tions is illustrated via some simple examples. Sections 3 and 4 present solutions to the problems ofglobal robust stabilization and global asymptotic tracking of constant signals, respectively. Forthe robust stabilization problem, we show how to explicitly construct, by using repeatedly theadding a power integrator technique, a smooth static state feedback control law that renders thelower-triangular system with uncertainty (nonlinear parametrization) globally asymptoticallystable, uniformly in the unknown time-varying disturbances or parameters over a knowncompact set. For the tracking problem, we "rst demonstrate that output tracking of constantsignals is usually very di$cult and unsolvable, for a lower-triangular system whose Jacobianlinearization is not controllable. This is a new phenomenon that is substantially di!erent from theconventional case where tracking of a bounded and smooth time-varying signal can be donestraightforwardly, for fully feedback linearizable systems [3, 4]. Being aware of di$culty oftracking a reference trajectory (even a constant trajectory), we propose an appropriate growth
398 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

condition under which the problem of asymptotic output tracking of a constant signal is solvableby smooth state feedback. In the low-dimensional case, we also demonstrate in Section 4 how theproblem of tracking a bounded and smooth time-varying signal can be solved non-trivially fora chain of power integrators. In Section 5, we turn our attention to adaptive control of uncertainnonlinear systems. It is assumed that the system under consideration contains only unknownconstant parameters that appear in the system linearly (the linear parametrization case). Anadaptive controller is explicitly constructed by means of a Lyapunov-like, step-by-step, recursivesynthesis procedure which is indeed an adaptive version of adding one power integrator design. Theresulting closed-loop adaptive system achieves state regulation with global stability in the sense ofLyapunov. Finally, some concluding remarks are drawn in Section 6. Two useful lemmas arecollected in the appendix.
2. PROBLEM STATEMENT AND BASIC ASSUMPTIONS
In this paper, we consider a single-input}single-output nonlinear system described by equationsof the form
xR1"xp1
2#/
1(x
1, d (t))
F
xRi"xpi
i`1#/
i(x
1,2, x
i, d (t))
F
xRn"upn#/
n(x
1,2, x
n, d (t))
y"x1
(1)
where x"(x1,2, x
n)T is the system state, u3R and y3R are the control input and the system
output, respectively, pi, i"1,2, n, are positive integers, and d(t) is an unknown piecewise
continuous disturbance or parameter belonging to a known compact set )LR s. The functions/i: Rn]RsPR1, i"1,2, n, are smooth in the state x with /
i(0, d (t))"0 for all d (t)3).
In the existing literature of which we are aware, coordinate-free geometric conditions for theexistence of a smooth state feedback control law and a global de"ned di!eomorphism transform-ing the uncertain nonlinear system
gR "f (g, u, d (t)), g3Rn, u3R
y"h (g), y3R (2)
into a system of the form (1) are not known and remain open, except for the case ofpi"1, i"1,2, n, where necessary and su$cient conditions under which an a.ne nonlinear
system is feedback equivalent to (1) do exist (see, for instance, References [2}4]). Althoughfeedback equivalence between the two systems is a fundamental and important problem thatdeserves an in-depth investigation, we will not touch the subject in this paper but instead, we willfocus our attention on a number of control design issues for a class of systems already put in the
399ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

form (1), which are genuinely nonlinear subject to parametric uncertainties. To be speci"c, we areinterested in the following robust and adaptive control problems:
Problem 1 (Global robust stabilization by smooth state feedback)Find, if possible, a smooth static state feedback control law u"a (x) that renders the equilib-
rium x"0 of the system (1) uniformly globally asymptotically stable ∀d(t)3).
Problem 2 (Asymptotic output tracking by smooth state feedback)Given a smooth bounded reference signal y
r(t) having bounded derivatives y (1)
r(t),2, y (n)
r(t),
"nd, if possible, a smooth time-varying state feedback control law
u"b (x, yr(t),2, y (n)
r(t)),
which renders system (1) uniformly globally stable ∀d (t)3) and
limt?=
Dy!yr(t) D"0
Problem 3 (Adaptive regulation with global stability)Consider system (1) in which d (t)"h3Rs represents an unknown constant vector and appears
in (1) linearly, i.e.
/i(x
1,2, x
i, d(t)),/
i(x
1,2, x
i)h, /
i(x
1,2, x
i)3R1]s
Find, if possible, a smooth adaptive controller of the form
hKQ "t(x, hK )
u"v(x, hK ) (3)
such that the closed-loop system is globally stable in the sense of Lyapunov, that is, all thetrajectories x (t) and hK (t) are globally bounded, and regulation of the state is achieved. In otherwords,
limt?=
x(t)"0
The objective of this paper is to solve these problems by means of a new synthesis techniquecalled adding a power integrator. To achieve this goal we list hereafter two basic assumptions onwhich the proposed approach to the nonlinear robust and adaptive control problems is based.
Assumption 1For i"1,2, n,
D/i(x
1,2, x
i, d(t)) D)( Dx
1Dpi#2#Dx
iDpi) Do
i(x
1,2, x
i), (4)
where oi( ) ) is a known non-negative smooth function.
Assumption 2p1*p
2*2*p
n*1 are odd integers.
Remark 1At the "rst glance it may seem that the hypothesis (4) is somewhat a restrictive growth
condition. However, it should be noticed that in the feedback linearizable case, i.e. when
400 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

p1"p
2"2"p
n"1, Assumption 1 is automatically satis,ed, due to smoothness of /
i( ) ) and
the property /i(0, d (t))"0. For this reason, Assumption 1 can be seen as a natural generalization
of the well-known feedback linearizable condition [2}4, 7, 9, 10].
Remark 2If Assumption 2 holds but Assumption 1 is not ful"lled, it may be impossible to achieve
asymptotic stabilization of system (1), even locally, by smooth state feedback. This subtle pointcan be illustrated by the following simple example.
Example 1Consider the planar system
xR1"x3
2#x
1
xR2"u (5)
Obviously, the Jacobian linearization of (5) is characterized by the pair
(A, B)"AC1 00 0D , C
01D B
which is uncontrollable. The uncontrollable mode has an eigenvalue on the open right-half plane,and therefore there is no any smooth (e.g. C1) state feedback control law that renders system (5)asymptotically stable at the equilibrium (x
1, x
2)"(0, 0) [26].
Remark 3When system (1) does not satisfy Assumption 2 but Assumption 1, it is usually not stabilizable
by smooth (e.g. C1) state feedback. As a matter of fact, the example below demonstrates thatcondition A2 is somewhat necessary for achieving smooth stabilization.
Example 2The two-dimensional system
xR1"x
2#x
1
xR2"u3 (6)
has an uncontrollable linearization
(A, B)"AC1 10 0D , C
00DB .
The uncontrollable mode has a positive eigenvalue. Hence, (6) cannot be stabilized by anyCr (r*1) state feedback.
As we shall see in the next three sections, under Assumptions 1 and 2 one can constructexplicitly a smooth state feedback controller or adaptive controller that solves the problems suchas global robust stabilization and adaptive regulation, for uncertain nonlinear systems of the form(1). The key tools in our analysis, which are essential for achieving a successful design, are addinga power integrator and the Young's inequality.
401ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

3. GLOBAL ROBUST STABILIZATION BY SMOOTH STATE FEEDBACK
In this section we present the "rst main result of the paper, which provides a solution to theproblem of global robust stabilization via static smooth state feedback, for the uncertain nonlinearsystem (1) which is neither feedback linearizable nor a.ne in the control input.
¹heorem 1Under Assumptions 1 and 2, the problem of global robust stabilization, i.e. Problem 1, is
solvable by smooth static state feedback.
Proof. The proof is based on a Lyapunov-like inductive argument which simultaneouslyconstructs a composite Lyapunov function as well as a globally stabilizing smooth state feedbackcontrol law.
Step 1: Consider system (1) in the case of n"1. Let <1(x
1)"x2
1/2. The time derivative of
<1
along the trajectories of (1) with n"1 is
<Q1(x
1)"x
1(xp1
2#/
1(x
1, d(t)))
)x1xp12#Dx
1Dp1`1o
1(x
1). (7)
Design the smooth state feedback control law
x2"x*
2(x
1)"!x
1(n#o
1(x
1))1@p1 (8)
Then
<Q1(x
1) D1~8
)!nxp1`11
(9)
This shows that Theorem 1 holds when n"1.Step 2: Consider the case where n"2. The following change of coordinates
m1"x
1, m
2"x
2!x*
2(m
1)
transforms system (1) into
mQ1"(
1(m
1, m
2, d(t))
mQ2"xp2
3#'
2(m
1, m
2, d (t)) (10)
where
(1(m
1, m
2, d (t))"/
1(x
1, d (t))#(m
2#x*
2)p1
'2(m
1, m
2, d (t))"/
2(x
1, x*
2#m
2, d (t))!
Lx*2
Lx1
(1(m
1, m
2, d(t))
Using Assumption 1 and the Young's inequality (see Lemma A in the appendix), it is easy to showthat there is a smooth non-negative function b
1(m
1, m
2) such that
D(1(m
1, m
2, d (t)) D)( Dm
1Dp1#Dm
2Dp1 )b
1(m
1, m
2). (11)
Moreover,
D/2(m
1, m
2#x*
2, d(t)) D)( Dm
1Dp2#Dm
2Dp2)cJ
2(m
1, m
2)
402 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

for a C= cJ2( ) )*0. The last two inequalities imply that
D'2(m
1, m
2, d (t)) D)( Dm
1Dp2#Dm
2Dp2 )c
2(m
1, m
2) (12)
for a smooth function c2( ) )*0, because p
1*p
2.
For system (10), consider the Lyapunov function
<2(m
1, m
2)"<
1(x
1)#
mq22
q2
, q2"p
1!p
2#2 (13)
The time derivative of <2( ) ) along the trajectories of (10) is
<Q2(m
1, m
2))!nxp1`1
1#x
1[(m
2#x*
2)p1!x*
2p1]#mq2~1
2[xp2
3#'
2(x
1, m
2, d(t))] (14)
With the help of (12) and Lemma A, we have
Dx1[(m
2#x*
2)p1!x*
2p1] D)
xp1`112
#mp1`12
oJ2(x
1, m
2) (15)
Dmq2~12
'2(x
1, m
2, d (t)) D)
xp1`112
#mp1`12
oL2(x
1, m
2) (16)
Substituting (15) and (16) into (14) results in
<Q2(m
1, m
2))!(n!1)xp1`1
1#mq2~1
2xp2
3#mq2~1
2[oJ
2(x
1, m
2)#oL
2(x
1, m
2)] (17)
Clearly, a smooth state feedback controller of the form
x3"x*
3(m
1, m
2)"!m
2[n!1#oN
2(x
1, m
2)]1@p2 (18)
with o62(x
1, m
2)"oJ
2( ) )#oL
2( ) )*0, is such that
<Q2(m
1, m
2) D(10)~(18)
)!(n!1)(mp1`11
#mp1`12
). (19)
Hence, Theorem 1 is true as well when n"2.
Inductive Step: Suppose that for system (1) with dimension k, there exists a global change ofcoordinates
m1"x
1
m2"x
2!x*
2(m
1)
F
mk"x
k!x*
k(m
1,2, m
k~1) (20)
transforming (1) into a system of the form
mQ1"(
1(m
1, m
2, d(t))
F
mQk~1
"(k~1
(m1,2, m
k~1, m
k, d (t))
mQk"xpk
k`1#'
k(m
1,2, m
k, d (t)) (21)
403ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

having the properties
D(j(m
1,2, m
j`1, d (t)) D)( Dm
1Dpj#2#Dm
j`1Dpj )b
j(m
1,2, m
j`1), j"1,2, k!1,
D'k(m
1,2, m
k, d (t)) D)( Dm
1Dpk#2#Dm
kDpk)c
k(m
1,2, m
k)
In addition, there are a Lyapunov function
<k(m
1,2, m
k)"
k+j/1
mqjj
qj
, qj"p
1!p
j#2,
and a smooth state feedback control law of the form
x*k`1
(m1,2, m
k)"!m
k[n!k#1#o6
k(m
1,2, m
k)]1@pk (22)
with o6k( ) )*0 being a smooth function, such that
<Qk(m
1,2, m
k) D(21)~(22)
)!(n!k#1)(mp1`11
#2#mp1`1k
) (23)
Our objective is to prove that Theorem 1 also holds when dimx"k#1. To see how this canbe done, consider system (1) with dimx"k#1. De"ne
mk`1
"xk`1
!x*k`1
(m1,2, m
k)
This, together with (21), yields the augmented system
mQ1"(
1(m
1, m
2, d(t))
F
mQk"(
k(m
1,2, m
k, m
k`1, d (t))
mQk`1
"xpk`1
k`2#'
k`1(m
1,2, m
k`1, d (t)) (24)
where
(k(m
1,2, m
k, m
k`1, d (t))"(m
k`1#x*
k`1)pk#'
k(m
1,2, m
k, d (t))
'k`1
(m1,2, m
k`1, d (t))"/
k`1(m
1,2, m
k`1, d (t))!
k+
m/1
Lx*k`1
Lmm
(m(m
1,2, m
m`1, d (t))
Similar to Step 2, one can easily show that
D(k(m
1,2, m
k, m
k`1; d(t)) D)( Dm
1Dpk#2#Dm
k`1Dpk)b
k(m
1,2, m
k`1)
D'k`1
(m1,2, m
k`1; d (t)) D)( Dm
1Dpk`1#2#Dm
k`1Dpk`1)c
k`1(m
1,2, m
k`1)
Now, construct the Lyapunov function
<k`1
(m1,2, m
k`1)"<
k(m
1,2, m
k)#
mqk`1
k`1qk`1
, qk`1
"p1!p
k`1#2 (25)
Note that
mQk"(
k(m
1,2, m
k, m
k`1, d (t))
,x*pkk`1
#'k(m
1,2, m
k, d (t))#[(m
k`1#x*
k`1)pk!x*pk
k`1]
404 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

Then,
<Qk`1
(m1,2, m
k`1) D(24)
)!(n!k#1)(xp1`11
#2#mp1`1k
)#mqk~1k
[(mk`1
#x*k`1
)pk!x*pkk`1
]
#mqk`1~1k`1
[xpk`1
k`2#'
k`1(m
1,2, m
k`1, d(t))] (26)
Using an almost identical argument as proceeded in Step 2, it can be deduced from (26) and theYoung's inequality (Lemma A) that there are non-negative smooth functions oJ
k`1( ) ) and oL
k`1( ) )
such that
<Qk`1
(m1,2, m
k`1))!(n!k#1)(mp1`1
1#2#mp1`1
k)#(mp1`1
1#2#mp1`1
k)#mqk`1~1
k`1xpk`1
k`2
#mp1`1k`1
(oJk`1
(m1,2, m
k`1)#oL
k`1(m
1,2, m
k`1)). (27)
Clearly, the smooth state feedback control law
xk`2
"x*k`2
"!mk`1
(n!k#o6k`1
(m1,2, m
k`1))1@pk`1, (28)
with o6k`1
(m1,2, m
k`1)"oJ
k`1( ) )#o'
k`1( ) ), yields
<Qk`1
(m1,2, m
k`1) D(24)~(28)
)!(n!k)(mp1`11
#2#mp1`1k`1
)
This completes the inductive step.Using repeatedly the robust stabilization result established in the inductive step, it is straight-
forward to prove Theorem 1. Moreover, at the last step, one can construct explicitly a change ofcoordinates (m
1,2, m
n) of the form (20), a static smooth state feedback control law
u"!mn[1#o6
n(m
1,2, m
n)]1@pn, o6
n( ) )*0 (29)
and a positive de"nite and proper Lyapunov function <n(m
1,2, m
n) of the form (25), such that
<Qn(m
1,2, m
n) D(1)~(29)
)!(mp1`11
#2#mp1`1n
)
Since the change of coordinates (20) is a global di!eomorphism, the original system (1) is globallyasymptotically stabilizable by (29) at x"0, for all d (t)3) .
Remark 4In the case where p
1"p
2"2"p
n"1 (i.e. the feedback linearizable case), Theorem 1 reduces
to, for instance, the robust stabilization result given in References [3, 4]. From the proof ofTheorem 1, it is clear that constructing the smooth sate feedback control law (29) requires onlyinformation of the bounding functions o
i( ) ) in Assumption 1 but the functions /
i(x, d (t)), i.e.,
/i(x, d (t)), i"1,2, n, need not to be known precisely.
Remark 5An extension of Theorem 1 to uncertain nonlinear systems containing the zero dynamics is also
possible. This can be done by means of a slightly di!erent but more subtle adding one integratortechnique. A detailed development can be founded in a companion paper [27]. Apparently, theresults reported in Reference [27] have incorporated and generalized early robust stabilizationschemes (e.g. References [7}9, 28]) for global robust stabilization of uncertain minimum-phasenonlinear systems in the lower-triangular form.
Remark 6In Reference [19], it was proved that (1) can be locally asymptotically stabilized by continuous
state feedback if all the characteristic numbers pi, i"1,2, n, are odd positive integers. Note
405ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

that the main theorem of Reference [19] is only an existence result and is local in nature.However, the question of how to design an explicit non-smooth controller remained open. Thisquestion was addressed later in Reference [20], where an algorithm was provided to constructa local continuous feedback control law. By comparison, Theorem 1 is global and allows us todesign a smooth controller explicitly. The price we paid here is that a set of stronger hypothesessuch as (A1) and (A2) are required. Our assumptions are, nevertheless, somewhat necessary, asdemonstrated in Section 2.
We conclude this section by remarking that Theorem 1 also holds for the system
xR1"xp1
2#f
1(x, d (t))
xR2"xp2
3#f
2(x, d (t))
F
xRn"upn#f
n(x, d (t)) (30)
under Assumption 2 and the following condition:
D fi(x, d(t)) D)( Dx
1Dpi#2#Dx
iDpi ) o
i(x
1,2, x
i), i"1,2, n. (31)
4. GLOBAL ASYMPTOTIC TRACKING
In this section we turn our attention to the tracking problem of the uncertain nonlinear system (1)or (30). For a feedback linearizable nonlinear system without uncertainties, i.e. whenp1"p
2"2"p
n"1 and no d (t) appears in (1), the output tracking problem (Problem 2)
formulated in Section 2 can be easily solved by applying the stabilization result obtained in theprevious section. As a matter of fact, it is not di$cult to prove that, with the aid of a change ofcoordinates, stabilizability of the feedback linearizable system implies solvability of the outputtracking problem, as long as the Jacobian linearization of the system is controllable and the system isof the lower-triangular form. On the other hand, the Jacobian linearization of system (1) becomesuncontrollable when p
i'1. In this case, the output tracking problem is non-trivial and indeed
becomes quite challenging. In particular, even in the absence of d (t), stabilizability of system (1)does not necessarily imply the existence of a solution to the tracking problem.
To make this point clear, we examine, in what follows, a simple output tracking problem ofa two-dimensional nonlinear system.
Example 3Consider a SISO planar system of the form
xR1"xp
2!x4
1#x5
1
xR2"up
y"x1
(32)
where p"1 or 3. The problem of interest is to investigate a possibility of driving the systemoutput to track a constant signal y
3(t)"1 asymptotically.
406 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

It is crucial to observe that in the case of either p"1 or 3, the global stabilization problem canbe easily solved by Theorem 1. As we shall see in a moment, the output tracking problem is,however, radically di!erent in the two cases.
Let e"x1!y
3(t)"x
1!1. Then system (32) can be rewritten as
eR"xp2#(1#e)4e
xR2"up (33)
When p"1, the Jacobian linearization of (32) or (33) is controllable and system (33) is feedbacklinearizable. As a result, the output tracking problem of system (32) is solvable and its solution canbe simply derived from the stabilization solution of system (33).
When p"3, the Jacobian linearization of (33) is characterized by the pair
A"A1 00 0B , B"A
00B .
By the condition in Reference [26], system (33) cannot be stabilized at the equilibrium(e, x
2)"(0, 0), by any smooth state feedback (i.e. u (e, x
2)3C= with u (0, 0)"0).
In conclusion, the output tracking problem of (32) with p"3 is unsolvable by smooth statefeedback, although the stabilization problem of (32) is solvable.
Being aware of impossibility of achieving asymptotic tracking of a bounded and smoothreference signal (even a constant signal), next we "rst develop a su$cient condition under whichthe problem of output tracking of a constant signal is solvable by smooth state feedback, fora subset of the set of all uncertain lower-triangular systems (1).
Consider the SISO uncertain system (30) in which f1( ) )"0, i.e.
xR1"xp1
2
xR2"xp2
3#f
2(x, d (t))
F
xRn"upn#f
n(x, d (t))
y"x1
(34)
Suppose that the following growth condition is ful"lled:
Assumption 3For i"2,2, n,
D fi(x, d (t)) D)( Dx
2Dpi#2#Dx
iDpi )o
i(x
1,2, x
i), (35)
where oi( ) ) is a non-negative smooth function.
Corollary 1Under hypotheses A2+A3, the global output tracking problem of any constant signal is
solvable by smooth state feedback, for the nonlinear system (34).
407ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

Proof. Let y3(t)"c be a constant reference signal that needs to be tracked. De"ne the error
signal
e (t)"y (t)!y3(t)"x
1!c
Then system (34) becomes
eR"xp1
2
xR2"xp2
3#f
2(e#c, x
2,2, x
n, d (t))
F
xRn"upn#f
n(e#c, x
2,2, x
n, d(t))
y"x1, (36)
By Assumption 3, it is clear that
D fi(e#c, x
2,2, x
n, d(t)) D)( Dx
2Dpi#2#Dx
iDpi )o
i(e#c, x
2,2, x
i), i"2,2, n. (37)
This, in turn, implies that system (36) satis"es Assumptions 1}2 of Theorem 1. Thus, the outputtracking problem of (34) becomes a robust stabilization problem of system (36). By Theorem 1,there exists a smooth static state feedback control law u (e, x
2,2, x
n) that renders system (36)
globally asymptotically stable at (e, x2,2, x
n)"0, uniformly in d (t)3). K
If pi"1, i"1,2, n, Corollary 1 identi"es a class of uncertain feedback linearizable systems for
which the constant signal tracking problem is solvable by smooth state feedback. In the casewhen p
i'1, i"1,2, n, while the system (34) seems to be quite restrictive, it nevertheless
includes a chain of power integrators as its special case. As an immediate consequence, we havethe following tracking result for a chain of power integrators.
Corollary 2Under Assumption 2, the output y"x
1of a chain of power integrators can follow asymp-
totically any constant signal.
In the remainder of this section, we discuss brie#y the more challenging case where a referencesignal to be tracked is a bounded and smooth trajectory whose time derivatives are all bounded.Realizing di$culty and complexity of achieving asymptotic tracking of a prescribed referencesignal y
3(t), we focus our attention on the situation where the reference signal is not just
a bounded time-varying function, but the state of a reference model.For simplicity, consider a special chain of power integrators of the form
xR1"xp
2
xR2"u (38)
The reference signals are the state trajectories of the dynamic system
rR1"rp
2
rR2"/(r
1, r
2) (39)
408 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

The proposition below on global asymptotic tracking is only a preliminary result that can bederived, again using the proposed design technique, i.e. adding a power integrator.
Proposition 1Suppose all the reference state trajectories (r
1(t), r
2(t)) of (39) are bounded in the sense that
there exists a C1 Lyapunov function <0(r1, r
2), which is positive de"nite and proper, such that
<Q0(r1, r
2) D(39)
)0.
Then, there is a smooth state feedback control law that forces all the state trajectories of system(38), irrespectively of what the initial condition of the system is, to track the reference signalasymptotically.
Proof. Let ei"x
i!r
i, i"1, 2. The error dynamics are described by
eR1"(e
2#r
2)p!rp
2
eR2"u!/ (r
1, r
2) (40)
Denote <1(e
1)"e2
1/2. Clearly,
<Q1(e
1)"e
1((e
2#r
2)p!rp
2)
Choose the virtual control e*2"!e
1. Using Lemma B in the appendix yields
<Q1(e
1))!
ep`11
2p~1
Next, we use the adding one integrator technique to achieve global asymptotic tracking. De"nez2"e
2!e*
2"e
2#e
1. In the new coordinates, we have
eR1"(!e
1#r
2)p!rp
2#(z
2!e
1#r
2)p!(!e
1#r
2)p
zR2"u!/(r
1, r
2)!rp
2#(z
2!e
1#r
2)p :"v (41)
Note that there is a smooth function g ( ) ) satisfying
(z2#a)p!ap"z
2g (z
2, a), where a :"!e
1#r
2.
Consider the Lyapunov function
<2(r1, r
2, e
1, z
2)"<
0(r1, r
2)#<
1(e
1)#
z222
for system (41). A direct calculation shows that
<Q2(r1, r
2, e
1, z
2) D(41)
)!
ep`11
2p~1#e
1z2g (z
2, a)#z
2v (42)
Thus, the feedback control law
v"!z2!e
1g (z
2, a)
renders the closed-loop system (39)}(41) globally stable. In addition, by the La Salle's invarianceprinciple, the error signal (e
1, e
2) converges to zero asymptotically. Therefore, the problem of
409ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421
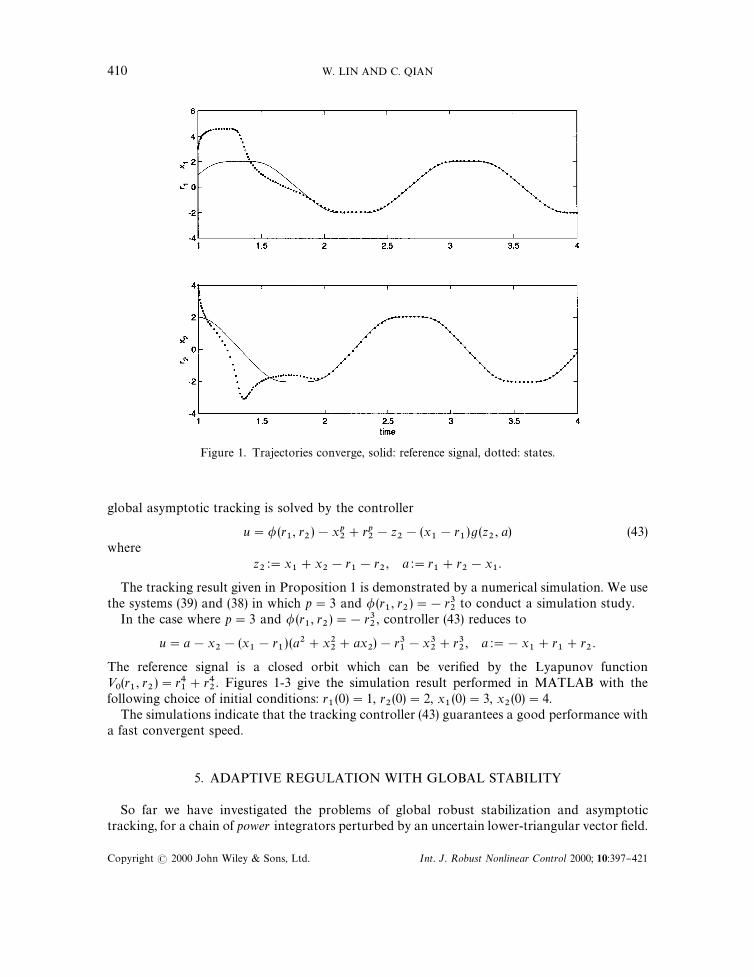
Figure 1. Trajectories converge, solid: reference signal, dotted: states.
global asymptotic tracking is solved by the controller
u"/ (r1, r
2)!xp
2#rp
2!z
2!(x
1!r
1)g(z
2, a) (43)
wherez2:"x
1#x
2!r
1!r
2, a :"r
1#r
2!x
1.
The tracking result given in Proposition 1 is demonstrated by a numerical simulation. We usethe systems (39) and (38) in which p"3 and /(r
1, r
2)"!r3
2to conduct a simulation study.
In the case where p"3 and / (r1, r
2)"!r3
2, controller (43) reduces to
u"a!x2!(x
1!r
1) (a2#x2
2#ax
2)!r3
1!x3
2#r3
2, a :"!x
1#r
1#r
2.
The reference signal is a closed orbit which can be veri"ed by the Lyapunov function<0(r1, r
2)"r4
1#r4
2. Figures 1-3 give the simulation result performed in MATLAB with the
following choice of initial conditions: r1(0)"1, r
2(0)"2, x
1(0)"3, x
2(0)"4.
The simulations indicate that the tracking controller (43) guarantees a good performance witha fast convergent speed.
5. ADAPTIVE REGULATION WITH GLOBAL STABILITY
So far we have investigated the problems of global robust stabilization and asymptotictracking, for a chain of power integrators perturbed by an uncertain lower-triangular vector "eld.
410 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

Figure 2. Phase portrait, solid: reference signal, dotted: states.
Figure 3. Control signal.
411ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

The robust control results obtained in the previous two sections require precise information of thecompact set ), i.e. the bound of the time-varying disturbance d(t) must be known. If this crucialpiece of information is not available for feedback design, the robust control schemes developed sofar cannot be implemented. In such a situation, nonlinear adaptive control can be used to dealwith uncertain nonlinear systems with parametric uncertainty. In this section we study adaptivecontrol of an uncertain nonlinear system of the form (1), under the common condition thatd(t)"h represents an unknown constant vector and appears in the system (1) linearly.
To be precise, consider a single-input uncertain nonlinear system in the lower-triangular form
xR1"xp1
2#/
1(x
1)h
F
xRi"xpi
i`1#/
i(x
1,2, x
i)h
F
xRn"upn#/
n(x
1,2, x
n)h (44)
where /i(x)3R1]s, i"1,2, n, are known smooth covector "elds, and h3Rs is an unknown
constant vector.The design goal is to explicitly construct an adaptive controller of the form (3), which solves the
problem of adaptive regulation with global stability, for the nonlinear system (44). The class ofuncertain nonlinear systems we shall deal with throughout this section is characterized byAssumption 2 and the following condition.
Hypothesis 1For i"1,2, n,
E/i(x
1,2, x
i)E)( Dx
1Dpi#2#Dx
iDpi )b
i(x
1,2, x
i) (45)
where bi( ) ) is a non-negative smooth function.
The main result of this section is the following theorem which provides a solution to Problem 3.
¹heorem 2Under conditions H1 and A2, there is a smooth adaptive controller of the form (3) that solves
Problem 3 for the uncertain nonlinear system (44).
Proof. The proof is again based on the technique of adding one power integrator proposed in thepaper. Using repeatedly this design technique, we show how to explicitly construct a controlLyapunov function as well as an adaptive controller (i.e. a dynamic state compensator) thatachieves global stability with state regulation.
Step 1. Let hI (t)"h!hK (t) and <1(x
1, hI )"1
2x21#1
2hI ThI . The time derivative of <
1along the
trajectories of x1*subsystem of (44) satis"es
<Q1(x
1, hI ) "x
1(xp1
2#/
1(x
1) (hI #hK ))!hKQ T (t)hI (t)
"x1(xp1
2#/
1(x
1)hK )!(hKQ T(t)!x
1/1(x
1))hI (t)
)x1x*p1
2#xp1`1
1c1(x
1, hK )#x
1(xp1
2!x*p1
2)!(hKQ T (t)!((x
1))hI (t) (46)
412 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

where c1(x
1, hK ) :"[(1#hK 2)/2]b
1(x
1), ((x
1)"x
1/
1(x
1)3R1]s. It is clear from (46) that the
virtual controller
x*2"!x
1[n#c
1(x
1, hK )]1@p1 (47)
is such that<Q1(x
1, hI ))!nxp1`1
1#x
1(xp1
2!x*p1
2)#((
1(x
1)!hKQ T(t))hI (t). (48)
Step 2: Consider the (x1, x
2)*subsystem of (44). A global di!eomorphism of the form
m1"x
1, m
2"x
2!x*
2(m
1, hK )
transforms the (x1, x
2)*subsystem of (44) into
mQ1"d
1(m
1, m
2, hK )#'
1(m
1)h!u
1(m
1, hK )hKQ
mQ2"xp2
3#*
2(x
1, m
2, hK )#'
2(m
1, m
2, hK )h!u
2(m
1, m
2, hK )hKQ (49)
where
u1(m
1, hK ) :"0, u
2(m
1, m
2, hK ) :"
Lx*2
LhK!
Lx*2
Lx1
u1(m
1, hK )
'1(m
1) :"/
1(x
1), '
2(m
1, m
2, hK ) :"/
2(x
1, x*
2#m
2)!
Lx*2
Lx1
/1(x
1)
d1(m
1, m
2, hK ) :"(m
2#x*
2)p1, *
2(m
1, m
2, hK ) :"!
Lx*2
Lx1
d1(m
1, m
2, hK )
Using (H2) and Lemma A (see the appendix), it is easy to show that the following relations hold:
E(1(m
1)E)mp1`1
1a1(m
1), a
1(m
1)"b
1(x
1)*0
E'1(m
1)E)Dm
1Dp1b
1(m
1), b
1(m
1)"b
1(x
1)*0
E'2(m
1, m
2, hK )E)( Dm
1Dp2#Dm
2Dp2)b
2(m
1, m
2, hK ) for some C= b
2( ) )*0
Dd1(m
1, m
2, hK ) D)( Dm
1Dp1#Dm
2Dp1)o6
1(m
1, m
2, hK ), for some C= o6
1( ) )*0
D*2(m
1, m
2, hK ) D)( Dm
1Dp2#Dm
2Dp2)o'
2(m
1, m
2, hK ), for some C= o'
2( ) )*0 (50)
Now, consider the Lyapunov function
<2(x
1, m
2, hI )"<
1(x
1, hI )#
mq22
q2
, q2"p
1!p
2#2
which is positive de"nite and proper. A direct calculation gives
<Q2(x
1, m
2, hI ) D
(49))!nxp1`1
1#x
1[(m
2#x*
2)p1!x*p1
2]#((
1(x
1)!hKQ T )hI
#mq2~12
[xp2
3#*
2(x
1, m
2, hK )#'
2(x
1, m
2, hK )h]!mq2~1
2u
2(m
1, m
2, hK )hKQ
"!nxp1`11
#x1[(m
2#x*
2)p1!x*p1
2]#((
2(x
1, m
2, hK )!hKQ T )
](hI #g2(x
1, m
2, hK ))#mq2~1
2[xp2
3#*
2(x
1, m
2, hK )#'
2(x
1, m
2, hK )hK ]
!(2(x
1, m
2, hK )g
2(x
1, m
2, hK ) (51)
413ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

where
(2(x
1, m
2, hK )"( (x
1)#mq2~1
2'
2(x
1, m
2, hK ), g
2(x
1, m
2, hK )"mq2~1
2uT
2(m
1, m
2, hK )
with the property that
E(2(m
1, m
2, hK )E)(mp1`1
1#mp1`1
2)a
2(m
1, m
2, hK )
Using (H1)}(A2), (50) and Lemma A, it is easy to show that
Dx1[(m
2#x*
2)p1!x*p1
2] D)
xp1`113
#mp1`12
cJ2(x
1, m
2, hK )
Dmq2~12
[*2(x
1, m
2, hK )#'
2(x
1, m
2, hK )hK ] D)
xp1`113
#mp1`12
cL2(x
1, m
2, hK )
D(2(x
1, m
2, hK )g
2(x
1, m
2, hK ) D)
xp1`113
#mp1`12
cN2(x
1, m
2, hK ) (52)
for some non-negative smooth functions c(2( ) ), c8
2( ) ) and c6
2( ) ). With this in mind, it follows from
(51) that
<Q2(x
1, m
2, hI ))!(n!1)xp1`1
1#((
2(x
1, m
2, hK )!h)0 T ) (hI #g
2(x
1, m
2, hK ))
#mq2~12
(xp2
3!x*p2
3)#mq2~1
2x*p2
3#mp1`1
2c2(m
1, m
2, hK ) (53)
where c2( ) )"cL
2(x
1, m
2, hK ) #cJ
2(x
1, m
2, hK )#cN
2(x
1, m
2, hK )*0. Choose
x*3"!m
2[n!1#c
2(x
1, m
2, hK )]1@p2 (54)
This virtual controller is such that
<Q2(x
1, m
2, hI ) D
(49)~(54))!(n!1)(xp1`1
1#mp1`1
2)#mq2~1
2(xp2
3!x*p2
3)
#((2(x
1, m
2, hK )!hKQ T ) (hI #g
2(x
1, m
2, hK ))
Inductive Step: Suppose for system (44) with dimension k, there is a global change ofcoordinates
m1"x
1
m2"x
2!x*
2(m
1, hK )
F
mk"x
k!x*
k(m
1,2
, mk~1
, hK ) (55)
transforming (44) into the system
mQ1"d
1(m
1, m
2, hK )#'
1(m
1)h!u
1(m
1, hK )hKQ
F
mQk~1
"dk~1
(m1,2
, mk, hK )#'
k~1(m
1,2, m
k~1, hK )h!u
k~1(m
1,2, m
k~1, hK )hKQ
mQk"xpk
k`1#*
k(m
1,2, m
k, hK )#'
k(m
1,2, m
k, hK )h!u
k(m
1,2, m
k, hK )hKQ (56)
414 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

where
E'j(m
1,2, m
j, hK )E)( Dm
1Dpj#2#Dm
jDpj )b
j(m
1,2, m
j, hK ) j"1,2, k,
Ddj(m
1,2, m
j`1, hK ) D)( Dm
1Dpj#2#Dm
j`1Dpj )o6
j(m
1,2, m
j`1, hK ) j"1,2, k!1,
D*k(m
1,2, m
k, hK ) D)( Dm
1Dpk#2#Dm
kDpk )oL k(m
1,2, m
k, hK )
Moreover, there is an controller
x*k`1
"!mk[n!k#1#c
k(m
1,2, m
k, hK )]1@pk, c
k( ) )*0 (57)
such that the closed-loop system (56)} (57) satis"es
<Qk(m
1,2, m
k, hI ) D
(56)~(57))!(n!k#1)(mp1`1
1#2#mp1`1
k)#mqk~1
k(xpk
k`1!x*pk
k`1)
#((k(m
1,2, m
k, hK )!hKQ T ) (hI #g
k(m
1,2, m
k, hK )) (58)
where
<k(m
1,2, m
k, hI ) :"
k+j/1
mqjj
qj
#
hI ThI2
, qj"p
1!p
j#2
is a positive de"nite and proper Lyapunov function. Moreover,
E(k(m
1,2, m
k, hK )E)(mp1`1
1#2#mp1`1
k)a
k(m
1,2, m
k, hK )
Then, in the case when the dimension of system (44) is equal to k#1, introduce the transforma-tion
mk`1
"xk`1
!x*k`1
(m1,2, m
k, hK )
This, together with (57), leads to the augmented system
mQ1"d
1(m
1, m
2, hK )#'
1(m
1)h!u
1(m
1, hK )hKQ
F
mQk"d
k(m
1,2, m
k`1, hK )#'
k(m
1,2, m
k, hK )h!u
k(m
1,2, m
k, hK )hKQ ,
mQk`1
"xpk`1k`2
#*k`1
(m1,2, m
k`1, hK )#'
k`1(m
1,2, m
k`1, hK )h!u
k`1(m
1,2, m
k`1, hK )hKQ (59)
where
uk`1
(m1,2, m
k`1, hK )"!
k+j/1
Lx*k`1
Lmj
uj(m
1,2, m
j, hK )#
Lx*k`1LhK
dk(m
1,2, m
k`1, hK )"*
k(m
1,2, m
k, hK )#(m
k`1#x*
k`1)pk
'k`1
(m1,2, m
k`1, hK )"/
k`1(m
1,2, m
k`1, hK )!
k+j/1
Lx*k`1
Lmj
'j( ) )
*k`1
(m1,2, m
k`1, hK )"!
k+j/1
Lx*k`1
Lmj
dj( ) )
415ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

Now consider the Lyapunov function
<k`1
(m1,2, m
k`1, hI )"<
k(m
1,2, m
k, hI )#
mqk`1k`1
qk`1
, qk`1
"p1!p
k`1#2
Clearly,
<Qk`1
( ) ) D(59)
)!(n!k#1)(mp1`11
#2#mp1`1k
)#mqk~1k
(xpkk`1
!x*pkk`1
)
#((k(m
1,2, m
k, hK )!hKQ T ) (hI#g
k(m
1,2, m
k, hK ))
#mqk`1~1k`1
[xpk`1k`2
#*k`1
(m1,2, m
k`1, hK )#'
k`1(m
1,2, m
k`1, hK )h]!mqk`1~1
k`1u
k`1( ) )hKQ
"!(n!k#1)(mp1`11
#2#mp1`1k
)#mqk~1k
(xpkk`1
!x*pkk`1
)
#((k`1
(m1,2, m
k`1, hK )!hKQ T )(hI#g
k`1(m
1,2, m
k`1, hK ))#mqk`1~1
k`1x*pk`1k`2
#mqk`1~1k`1
[xpk`1k`2
!x*pk`1k`2
]#mqk`1~1k`1
[*k`1
(m1,2, m
k`1, hK )#'
k`1(m
1,2, m
k`1, hK )hK ]
!(k`1
(m1,2, m
k`1, hK )g
k`1(m
1,2, m
k`1, hK )#(
k(m
1,2, m
k, hK )g
k(m
1,2, m
k, hK )
(60)where
(k`1
(m1,2, m
k`1, hK )"(
k(m
1,2, m
k, hK )#mqk`1~1
k`1'
k`1(m
1,2, m
k`1, hK )
gk`1
(m1,2, m
k`1, hK )"g
k(m
1,2, m
k, hK )#mqk`1~1
k`1uT
k`1(m
1,2, m
k, hK )
Similar to what we have done in Step 2, it is not di$cult to deduce from Lemma A that
Dmqk~1k
[(mk`1
#x*k`1
)pk!(x*k`1
)pk] D)13
(mp1`11
#2#mp1`1k
)#mp1`1k`1
cJk`1
(m1,2, m
k`1, hK ) (61)
Dmqk`1~1k`1
[*k`1
(m1,2, m
k`1, hK
1,2, hK
k)#'
k`1(m
1,2, m
k`1, hK )] D
)13
(mp1`11
#2#mp1`1k
)#mp1`1k`1
c(k`1
(m1,2, m
k`1, hK ) (62)
Moreover, by the de"nitions of (k`1
and gk`1
, we have
D(k`1
(m1,2, m
k`1, hK )g
k`1(m
1,2, m
k`1, hK )!(
k(m
1,2, m
k, hK )g
k(m
1,2, m
k, hK ) D
)D(k(m
1,2, m
k, hK )mqk`1~1
k`1uT
k`1( ) ) D#Dmqk`1~1
k`1'
k`1( ) )(g
k( ) )#mqk`1~1
k`1uT
k`1( ) )) D
)Dmk`1
(mp1`11
#2#mp1`1k
) DEmqk`1~2k`1
ak( ) )uT
k`1( ) )E#Dmqk`1~1
k`1(mpk`1
1#2#mpk`1
k) DM
k( ) )
)13
(mp1`11
#2#mp1`1k
)#mp1`1k`1
cNk`1
(m1,2, m
k`1, hK ) (63)
The last inequality is true due to the fact that for any integers 0)r)p1
and 1)j)k, givena positive number G, there is a smooth function bI
j(m
1,2, m
k`1, hK )*0 such that
Dmk`1
Dp1`1~r DmjD r Db
j(m
1,2, m
k`1, hK ) D)
mp1`1jG
#mp1`1k`1
bIj( ) )
By substituting (61)} (63) into (60), it is clear that the following virtual controller
x*k`2
"!mk`1
[n!k#ck`1
(m1,2, m
k`1, hK )]1@pk (64)
416 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

with ck`1
( ) ) :"cJk`1
( ) )#cLk`1
( ) )#cNk`1
( ) )*0, renders
<Qk`1
(m1,2, m
k`1, hI ) D
(59))!(n!k)(mp1`1
1#2#mp1`1
k#mp1`1
k`1)#mqk`1~1
k`1[xpk`1
k`2!x*pk`1
k`2]
#((k`1
(m1,2, m
k`1, hK )!hKQ T )(hI #g
k`1(m
1,2, m
k`1, hK )) (65)
This completes the inductive step.Using repeatedly the adaptive control result obtained in the inductive step, it is straightforward
to conclude that Theorem 2 is true. In fact, at the "nal step n, one can construct explicitly a globalchange of co-ordinates (m
1,2, m
n), a control Lyapunov function <
n(m
1,2, m
n, hI ) and a smooth
controller u* (m1,2, m
n, hK ) such that
<Qn(m
1,2, m
n, hI ) D
(44))!(mp1`1
1#2#mp1`1
n)#mqn~1
n[upn!u*pn]
#((n(m
1,2, m
n, hK )!hKQ T ) (hI #g
n(m
1,2, m
n, hK )) (66)
It is clear from (66) that the adaptive controller
hKQ "(Tn(m
1,2, m
n, hK )
u"u* (m1,2, m
n, hK ) (67)
renders<Qn(m
1,2, m
n, hI ) D
(44)~(67))!(mp1`1
1#2#mp1`1
n) (68)
This, in view of the classical Lyapunov stability theory [29,15], yields that the closed-loop systemis globally stable at the equilibrium (m
1,2, m
n, hI )"(0,2, 0). Since the Lyapunov function
<n(m
1,2, m
n, hI ) is positive de"nite and proper, it is concluded from (68) and La Salle's invariance
principle that all the bounded trajectories of the closed-loop system approach the largestinvariant set contained in M(m
1,2, m
n, hI ) :<Q
n"0N. Hence, lim
t?=(m
1(t),2, m
n(t))T"0. Since the
change of coordinates (56) (with k"n) is a global di!eomorphism, then
limt?=
(x1(t),2, x
n(t))T"0 ∀x(0)3Rn.
Combining Theorem 2 with Theorem 1, we rapidly arrive at the following robust adaptivecontrol result for single-input nonlinear systems in the presence of both time-varying distur-bances and parametric uncertainties.
¹heorem 3Consider the uncertain system of the form
xR1"xp1
2#f
1(x, d(t))#/
1(x
1)h
xR2"xp2
3#f
2(x, d(t))#/
2(x
1, x
2)h
F
xRn"upn#f
n(x, d (t))#/
n(x
1,2, x
n)h (69)
Under H1, A2 and condition (31), there exists a smooth robust adaptive controller of the form (3),which renders system (69) uniformly globally stable ∀d(t)3). In addition, the resultingclosed-loop system achieves global state regulation. That is,
limt?=
x (t)"0, ∀x(0)3Rn
417ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

Remark 7When p
i"1, i"1,2, n, Theorem 2 recovers early adaptive control results (e.g. see References
[3, 4]) for fully feedback linearizable systems with unknown constant parameters. On the otherhand, it is worth to point out that a solution to the adaptive output tracking problem witha constant reference signal can also be easily derived, for uncertain nonlinear systems of the form(34), under Assumptions 2}3 and the linear parametrization condition. However, if the referencesignal is a smooth time-varying function with bounded derivatives, the problem of adaptive outputtracking remains largely open. This is of course a non-trivial problem that is currently underinvestigation.
Remark 8With the help of an adaptive version of adding one power integrator, Theorem 2 can be
generalized to a class of uncertain nonlinear systems having zero dynamics. The reader is referredto Reference [30] for additional details.
6. CONCLUSIONS
We have presented solutions to the problems of global robust stabilization and adaptiveregulation with global stability, for a class of uncertain nonlinear systems approximated bya chain of power integrators, in the lower-triangular form. The systems under consideration do notnecessarily satisfy the feedback linearizability condition nor a.neness property, which have beentwo common requirements so far in the existing literature of adaptive and robust nonlinearcontrol. We removed these two conditions by virtue of the novel design technique called addinga power integrator, and therefore enlarged signi"cantly the class of inherently nonlinear systemsfor which adaptive and robust control can be achieved by smooth state feedback. The mainnovelty of the paper, in our opinion, is the development of adding a power integrator design,which is a signi"cant generalization of the adding a linear integrator technique initially proposedin References [5, 6]. The new design technique developed here has recently been applied to theproblem of almost disturbance decoupling with internal stability, leading to a global solution fora class of high-order lower-triangular systems [31].
It should be pointed out that the idea of adding a power integrator has also been used to solvea set-point output tracking problem for a restrictive class of lower-triangular nonlinear systems.As illustrated by Example 3, the output tracking problem of this kind is not trivial at all. In fact, itis usually not solvable by smooth state feedback if the feedback linearizability condition fails to besatis"ed. A challenging question for future investigations will be a characterization of suitableconditions for the problem of global asymptotic output tracking with global stability (i.e.Problem 2 posed in Section 2) to be solvable.
7. APPENDIX
In this section, we introduce two useful lemmas that will be used throughout the paper. The "rstlemma is a slight modi"cation of Young's inequality. It plays a key role in proving the mainresults of the paper such as Theorems 1 and 2.
418 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

¸emma AFor any positive integers m, n and any positive real number c, the following inequality holds:
Dx Dm Dy Dn)m
m#ncDx Dm`n#
n
m#nc~m@n Dy Dm`n
Proof. Note that
Dx Dm Dy Dn"cm@m`n Dx Dmc~m@m`n Dy Dn)m
m#ncDx Dm`n#
n
m#nc~m@n Dy Dm`n
The last inequality follows from the the Young's inequality
Dab D)Da Dpp
#
Db Dqq
where 1/p#1/q"1, p'1, q'1. K
The next lemma gives a useful inequality for the design of a global tracking controller.
¸emma BThe following inequality holds:
x[(!x#a (t))p!a(t)p])!
xp`1
2p~1
where p*1 is an odd integer.
Proof. Lemma B is proved by an inductive argument. First of all, it is clear that when p"1,Lemma B holds because
x[(!x#a (t))!a (t)]"!x2
Suppose for p'1,
x[(!x#a(t))p!a (t)p])!
xp`1
2p~1(A1)
Then in the case when k"p#2, one has
x[(!x#a(t))p`2!a (t)p`2]#xp`3
2p`1"x[(!x#a (t))p!a (t)p](!x#a(t))2
#xa (t)p[(!x#a(t))2!a (t)2]#xp`3
2p`1
)!
xp`1
2p~1(!x#a (t))2#xa(t)p
419ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

][(!x#a (t))2!a(t)2]#xp`3
2p`1
"
x2
2p`1(!3xp`1#8axp!4a2xp~1#2p`1ap(x!2a))
(A2)
Let b"2a. Thus,
!3xp`1#8axp!4a2xp~1#2p`1ap (x!2a)"!3xp`1#4bxp!b2xp~1#2bp (x!b)
(A3)
Observe that
4bxp!b2xp~1"xp~1(!b2#4bx)
)xp~1(b2#2x2 )
"b2xp~1#2xp`1 (A4)
By the Young's Inequality,
2bpx)2pbp`1
p#1#
2xp`1
p#1(A5)
b2xp~1)2bp`1
p#1#
(p!1)xp`1
p#1(A6)
Putting (A4)} (A6) and (A3) together, we arrive at
!3xp`1#4bxp!b2xp~1#2bp (x!b))0
This implies that the right side of inequality (A2) is non-positive. Therefore,
x[(!x#a (t))p`2!a(t)p`2])!
xp`3
2p`1. K
REFERENCES
1. Nijmeijer H, van der Schaft AJ. Nonlinear Dynamical Control Systems. Springer: Berlin, 1990.2. Isidori A. Nonlinear Control Systems, (3rd edn). Springer: New York, 1995.3. Krstic M, Kanellakopoulos I, Kokotovic PV. Nonlinear and Adaptive Control Design, Wiley: New York, 1995.4. Marino R, Tomei P. Nonlinear Control Design, Prentice Hall: U.K., 1995.5. Byrnes CI, Isidori A. New results and examples in nonlinear feedback stabilization. Systems & Control ¸etters 1989;
12:437}442.6. Tsinias J. Su$cient Lyapunov-like conditions for stabilization. Mathematic Control Signals and Systems 1989;
2:343}357.7. Seto D, Annaswamy AM, Baillieul J. Adaptive control of nonlinear systems with a triangular structure. IEEE
¹ransactions on Automatic Control 1994; 39:1411}1428.8. Jiang ZP, Hill DJ, Fradkov AL. A passi"cation approach to adaptive nonlinear stabilization. Systems & Control
¸etters 1996; 28:73}84.9. Lin, W. Global robust stabilization of minimum-phase nonlinear systems with uncertainty. Automatica 1997;
33:453}462.
420 W. LIN AND C. QIAN
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421

10. Lin W, Shen T. Robust passivity and feedback design for minimum-phase nonlinear systems with structuraluncertainty. Automatica 1999; 35:35}47.
11. Jiang ZP, Mareels I. A small gain control method for nonlinear cascaded systems with dynamic uncertainties. IEEE¹ransactions on Automatic Control 1997; 42:292}308.
12. Mazenc F. Stabilization of feedforward systems approximated by a nonlinear chain of integrators. Systems & Control¸etters 1997; 32:223}229.
13. Lin W, Qian C. New results on global stabilization of feedforward nonlinear systems via small feedback. Proceedingsof the 37th IEEE CDC, Tampa, 1998; 879}884.
14. Qian C, Lin W. Using small feedback to stabilize a wider class of feedforward systems. Proceedings of the 14th IFAC=orld Congress, Vol. E, Beijing, 1999; 309}314.
15. Hahn W. Stability of Motion, Springer: Berlin, 1967.16. Bacciotti A. ¸ocal Stabilizability of Nonlinear Control Systems. World Scienti"c: Singapore, 1992.17. Dayawansa WP. Recent advances in the stabilization problem for low dimensional systems. Proceedings of the second
IFAC Symposium on Nonlinear Control Systems Design Symposium, Bordeaux, 1992; 1}8.18. Dayawansa WP, Martin CF, Samelson S. Asymptotic stabilization of a class of smooth two dimensional systems.
SIAM. Journal on Optimization and Control 1990; 28:1321}1349.19. Coron JM, Praly L. Adding an integrator for the stabilization problem. Systems & Control ¸etters 1991; 17:89}104.20. Celikovsky S, Aranda-Bricaire E. Constructive nonsmooth stabilization of triangular systems. Systems & Control
¸etters 1999; 36:21}37.21. Hermes H. Homogeneous coordinates and continuous asymptotically stabilizing feedback controls. In Di+erential
Equations Stability and Control, Lecture Notes in Applied Mathematics, vol. 109. Elaydi S (ed.), Marcel Dekker:New York, 1991; 249}260.
22. Hermes H. Nilpotent approximation of control systems and distributions. SIAM. Journal of Optimization on Control1986; 24:731}736.
23. Hermes H. Nilpotent and high-order approximations of vector "eld systems. SIAM. Review 1991; 33:238}264.24. Kawski M. Homogeneous stabilizing feedback laws. Control ¹heory and Advanced ¹echnology 1990; 6:497}516.25. Kawski M. Stabilization of nonlinear systems in the plane. Systems & Control ¸etters 1989; 12:169}175.26. Brockett RW. Asymptotic stability and feedback stabilization. In Di+erential Geometric Control ¹heory, Brockett
RW, Millman RS, Sussmann HJ (eds). BirkaK user, Basel, 1983; 181}19127. Lin W, Qian C. Adding one power integrator: a tool for global stabilization of high-order lower-triangular systems.
Systems & Control ¸etters 2000; 39.28. Lin Y, Sontag ED, Wang Y. Input to state stabilizability for parametrized family of systems. International Journal of
Robust and Nonlinear Control 1995; 5:187}205.29. Khalil H. Nonlinear Systems. Macmillan: New York, 1992.30. Lin W, Qian C. Adaptive regulation of high-order cascade nonlinear systems: an adding a power integrator technique.
Systems & Control ¸etters 2000; 39.31. Qian C, Lin W. Almost disturbance decoupling for a chain of power integrators perturbed by a lower-triangular
vector "eld. Proceedings of the 38th IEEE CDC, Phoenix, AZ, 1999; 2082}2087.
421ROBUST REGULATION OF POWER INTEGRATORS
Copyright ( 2000 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control 2000; 10:397}421