robotic pursuit evasion robotic pursue evasion and graph...
TRANSCRIPT
Athanasios KehagiasAristotle University of Thessaloniki
(and Geoffrey A. Hollinger, Univ. of S. California)
Robotic Pursue Evasionand Graph Search
1
Robotic Pursuit Evasion And Graph Search
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

What will we talk about?
Graph Search (GS): everybody knows it Robotic Pursuit Evasion (PE): auro10_2.mp4
(from G. Hollinger’s thesis, CMU Robotics Institute)
2
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Graph Search
Mostly invisible evader (Parsons) Very little about visible evader (Nowakowski)
3
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Robotic Pursuit Evasion
Video: auro10_2.mp4
Indoor environment / floorplan Three pursuers Dirty set Node search
4
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Applications of Robotic Search / PE
Military Search and Rescue Tracking Elderly care Robotic exploration of hazardous sites Computer games
5
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Plan of the talk
Historical review (1940-2010) Models, algorithms, experiments, theorems “Dimensions” of the PE problem Desiderata Questions Discussion
6
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Timeline
7
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Prehistory
The search problem in Operations Research (Koopman, 1942)
PE and Differential Games (R. Isaacs, 1955) PE and Markov Decision Processes (Eaton and
Zadeh, 1962)
8
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Probabilistic problem Continuous geometry (can also be discrete)
Operations Research
Search return function: ( )q
9
Search effort: ( ) 0 and ( )x x dx
Choose ( ) to maximize ( ) ( )x g x q x dx
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Koopman, B.O., “The theory of search. III. The optimum distribution of searching effort”, Operations Research, vol. 5, pp.613--626, 1957.
Koopman, B.O., Search and screening: general principles with historical applications, 1980.
Dobbie, J.M., “A survey of search theory”, Operations Research, vol. 16, pp. 525--537, 1968.
Benkoski, S.J. and Monticino, M.G. and Weisinger, J.R., “A survey of the search theory literature”, Naval Research Logistics, vol. 38, pp. 469--494, 1991
Washburn, A.R., “Branch and bound methods for a search problem”, Naval Research Logistics, vol. 45, pp. 243--257, 1998
Champagne, L. and Carl, EG and Hill, R., “Search theory, agent-based simulation, and u-boats in the bay of Biscay”, Simulation Conference, 2003, vol.1, pp. 991--998, 2004.
10
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Continuous environment x(t), y(t) positions of pursuer and evader u(t), v(t) control functions of pursuer and evader
Pursuer’s gain:
Evader’s gain:
PE and Differential Games
11
( , )d fdt
x x u ( )d f
dt
y y, v
| ( ) ( ) |t t x y ς
| ( ) ( ) |t t x y ς
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
R. Isaacs, Differential Games, Wiley, 1965 Vidal, R. and Shakernia, O. and Kim, H.J. and Shim, D.H. and Sastry, S.
“Probabilistic pursuit-evasion games: theory, implementation, and experimental evaluation”, IEEE Trans. on Robotics and Automation, vol.18, pp. 662--669, 2002.
Li, D. and Cruz, JB and Chen, G. and Kwan, C. and Chang, M.H., “A hierarchical approach to multi-player pursuit-evasion differential games”, CDC-ECC'05, pp. 5674--5679, 2006.
Cao, H. and Ertin, E. and Kulathumani, V. and Sridharan, M. and Arora, A., “Differential games in large-scale sensor-actuator networks”, IPSN 2006, pp. 77--84, 2006.
Schenato, L. and Oh, S. and Sastry, S. and Bose, P., “Swarm coordination for pursuit evasion games using sensor networks”, ICRA 2005, pp. 2493--2498, 2006.
Bopardikar, S.D. and Bullo, F. and Hespanha, J.P., “On discrete-time pursuit-evasion games with sensing limitations”, IEEE Trans. on Robotics and Automation, vol. 24, pp.1429--1439, 2008
12
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Markov Decision Processes (MDP)
Discrete environment: a graph G=(V,E) x(t): position of the pursuer y(t): position of the evader Evader is a Markov chain:
with i,j in V Pursuer chooses his position: Joint state: z(t)=(x(t), y(t)) follows a “controlled” MC:
13
( ( 1) | ( ) ) ijPr y t j y t i P
( 1) ( )x t u t
, ( ( )) Pr ( ( 1), ( 1)) ( , ) | ( ( ), ( )) ( , ), ( )ij mnQ u t x t y t m n x t y t i j u t m
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Markov Decision Processes
Goal: choose u(t) to reach a state (i,i) If the evader is visible we have full knowledge of
z(t)=(x(t), y(t)) and it is a Markov Decision Process(MDP)
If the evader is invisible we have partial knowledge of z(t)=(x(t), y(t)) and it is a Partially Observable Markov Decision Process (POMDP)
14
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Eaton, JH and Zadeh, LA , Optimal Pursuit Strategies in Discrete-State Probabilistic Systems, ASME Transactions, Series D, Journal of Basic Engineering, vol. 84, 1962.
Hsu, D. and Lee, W.S. and Rong, N., A point-based POMDP planner for target tracking, ICRA 2008, pp. 1050-4729, 2008.
Miller, S.A. and Harris, Z.A. and Chong, E.K.P., “A POMDP framework for coordinated guidance of autonomous UAVs for multitarget tracking”, EURASIP Journal on Advances in Signal Processing, 2009.
Hutchinson, S.A. et al., “Game-Theoretic Analysis of a Visibility Based Pursuit-Evasion Game in the Presence of Obstacles”. ACC'09, pp. 373--378, 2009.
Basar, T., “Pursuit-evasion games in mobile networks, Ph.D. Thesis, 2010.
15
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Flashlight Search
Two non-robotic papers Sugihara, K. and Suzuki, I. and Yamashita, M., “The searchlight
scheduling problem”, SIAM Journal on Computing, vol.19, pp. 1024, 1990.
Suzuki, I. and Yamashita, M., “Searching for a mobile intruder in a polygonal region”, SIAM Journal on computing, vol. 21, pp.863, 1992.
They are in the Art Gallery tradition They have implicitly influenced the robotics literature
16
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
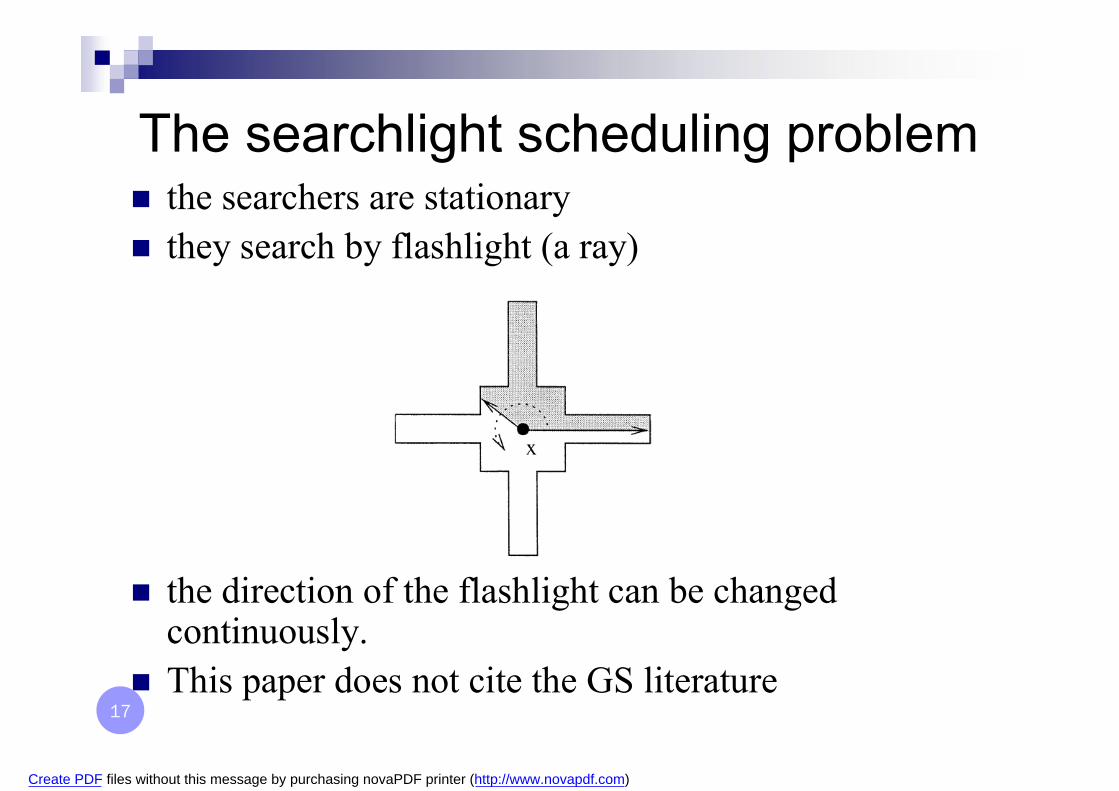
the searchers are stationary they search by flashlight (a ray)
the direction of the flashlight can be changed continuously.
This paper does not cite the GS literature
The searchlight scheduling problem
17
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Searching for a mobile intruder in a polygonal region
18
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

A single mobile searcher Searcher can have different degrees of visibility
a searcher with k flashlights whose visibility is limited to k rays emanating from his position (k-searcher)
a searcher with a point light source who can see in all directions simultaneously (-searcher).
Necessary and sufficient conditions are presented for a polygon to be searchable by various searchers.
Studies the class of polygons for which the searcher with two flashlights is as capable as the searcher with a point light source
A necessary and sufficient condition is given for such polygons to be searchable by the searcher with two flashlights.
The complexity of generating a search schedule under some of these conditions is also discussed.
This paper cites Parsons, Megiddo and Lapaugh.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Visibility-based PE (S.M. Lavalle and coworkers) S. M. LaValle, D. Lin, L. J. Guibas, J.-C. Latombe, and R. Motwani.
“Finding an unpredictable target in a workspace with obstacles”. ICRA 1997, pp. 737--742, 1997.
L. J. Guibas, J.-C. Latombe, S. M. LaValle, D. Lin, and R. Motwani. “Visibility-based pursuit-evasion in a polygonal environment”. LNCS vol. 1272, pp.17--30, 1997.
L. J. Guibas, J.-C. Latombe, S. M. LaValle, D. Lin, and R. Motwani. , “Visibility-based pursuit-evasion in a polygonal environment”. International Journal of Computational Geometry and Applications, vol. 9, pp. 471--494, 1999.
S. M. LaValle and J. Hinrichsen. “Visibility-based pursuit-evasion: Anextension to curved environments”. IEEE Trans. On Robotics and Automation, vol. 17, pp.196--202, 2002.
And many more …(http://msl.cs.uiuc.edu/~lavalle/vispe.html)
20
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Visibility-based PE (S.M. Lavalle and coworkers) These papers not only cite but actually discuss GS
ideas Search NumberMonotonicity Etc.
This work has inspired many other robotics researchersMany papers have been written on visibility-based PE This research line continues vigorously to the present.
21
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Visibility-based PE in a Polygonal Region
22
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Assumptions
Region is simply connected polygon (no holes) The pursuer has a map There is one pursuer, with 360 vision The evader is captured as soon as seen by the
pursuer The evader is arbitrarily fast The evader always knows the pursuer’s position
23
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Key Concepts
The polygonal region is denoted by F. For every point x in F, the visibility polygon is
and the invisibility set F–V(x) is the union of several disjoint simple connected polygons.
Some of these polygons are clean and some are dirty The boundary of V(x) consists of edges; some of these are edges of the original F; the remaining are gap edges (facing “free space”)
24
:V x y xy F
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

25
Visibility polygon
Invisibility set
Gap edges(black is clean,Red is dirty)
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

26
A point x has a V(x), with n associated gaps (n 0) each of which
can be clean or dirty (i.e. the invisible component behind that gap
will be clean or dirty).
This information can be encoded in an n-long string (say of 0’s
and 1’s) which we denote by B(x).
Note: B(x) can also be the empty string.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

27
Note: when we know x, we also know V(x) and so F–V(x), i.e. the
invisible components. And S F–V(x). So we don’t really need to
put S in the state, B(x) suffices (and it is discrete).
Also: we can discretize F (break it into cells) provided we do not
lose any critical information.
Critical information is how gaps change. We need a discretization
that preserves this information.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

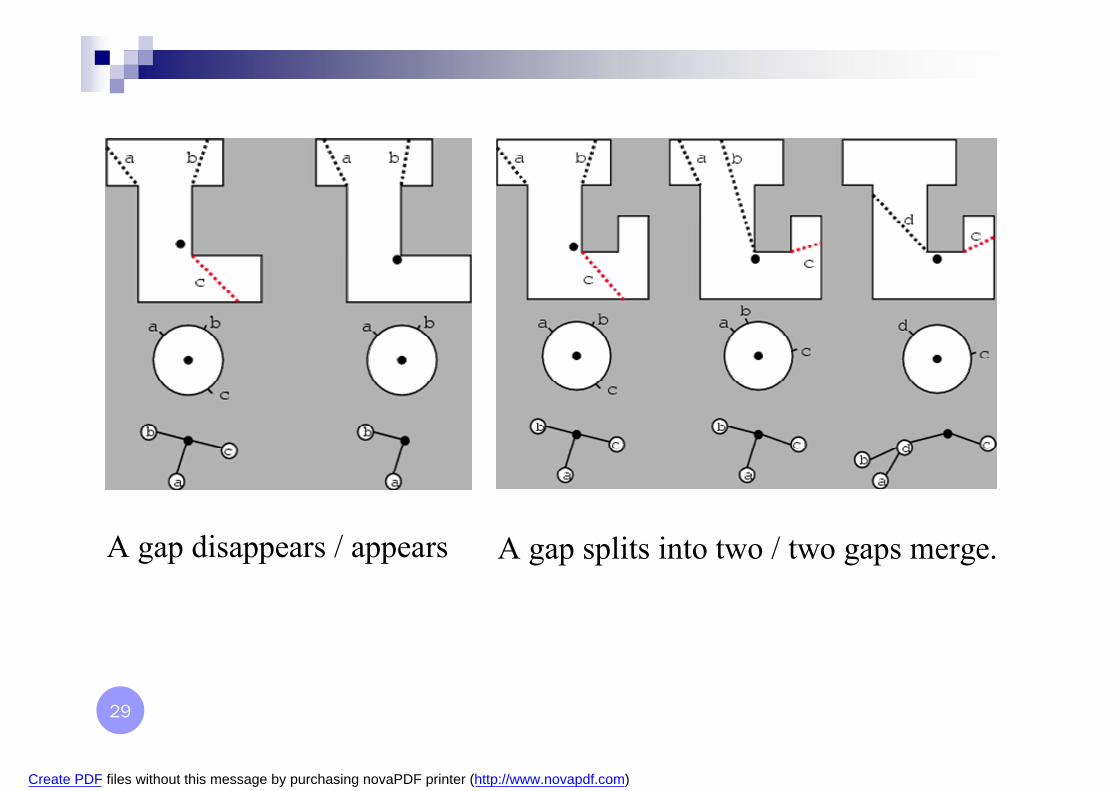
Critical Gap Events
28
1. A gap disappears
2. A gap appears (it gets a 0 label)
3. A gap splits into two gaps (they inherit the parents label)
4. Two gaps merge into a new one (it gets a 1 label if any of the original gaps had
a 1)
Gaps can also change in noncritical ways (continuous
transformation)
Assumption: we never have events which involve three gaps
simultaneouslyCreate PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
29
A gap disappears / appears A gap splits into two / two gaps merge.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Conservative Discretization
Form a discretization D={D1,…, DN} by: extending all edges of F (inside F), extending outward segments from all pairs of vertices
(inside F) Take all resulting sub-polygons as cells Di of the
discretization. This is a conservative discretization, i.e. no critical
gap events occur while the pursuer moves inside one of the cells.
30
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

31
The rules:
Example:
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

32
Along with the state space, we have a state transition graph.
We actually have two graphs:
•Gc is the connectivity graph; it has N nodes (one per cell) and its
edges follow the connectivity of the cells; it is an undirected graph.
•GI is the information graph (the state transition graph)
•nodes: for the i-th cell Di it has 2ni nodes, where ni is the number
of gaps associated with any x in Di
•edges: they respect critical gap events and information changes.
Note: GI is a directed graph.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Example 1:
Discretized polygon
Undirected adjacency graph
Directed information graph
Example clearing sequence:1-21/1 -> 2
33
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Example 2:
Discretized polygon
Undirected adjacency graph
Directed information graph
Example clearing sequences:1) 5-4-3-2
5/1 -> 4/1 -> 3/10 -> 2/02) 3-4-3-2
3/11 -> 4/1 -> 3/10 -> 2/034
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

35
Lavalle cites some of the classic graph search papers (Parsons, Megiddo etc.)
but he does not perform GS in the classical sense
instead he performs a shortest path computation in the information graph.
He develops an algorithm to determine if a polygon is 1-searchable
He also performs a theoretical analysis
•(In what follows H(F) is the search number of polygon F.)
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

36
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

(By Chung, Hollinger, and Isler )37
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

(By Lavalle et al.)38
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Some characteristics of the approach
39
Recontamination does helpThe algorithm is computationally viable essentially only for 1-searchable polygons(this is not the same as 1-searchable graphs)
The key concept in Lavalle’s formulation is visibility.
Lavalle’s work has been very influential, his papers are cited by many other works on robotic PE.
Most of these works keep the idea of visibility and visibility partition and try to find ways to make it computationally viable.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Hespanha, J.P. and Kim, H.J. and Sastry, S., “Multiple-agent probabilistic pursuit-evasion games”, 38th Decision and Control Conference, vol.3, pp. 2432--2437,1999.
Hespanha, J.P. and Prandini, M. and Sastry, S., “Probabilistic pursuit-evasion games: A one-step Nash approach”, 39th Decision and Control Conference, vol.3, pp.2272-2277, 2000.
He cites both Lavalle and the classic GS papers but his approach is quite different.
unknown maps probabilistic formulation game theoretic point of view
His approach works on any discrete environment; his examples deal with grids.
Hespanha
40
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Isler
V. Isler, S. Kannan, and S. Khanna. “Randomized Pursuit-Evasion with Limited Visibility”. In ACM-SIAM Symposium on Discrete Algorithms, 2004.
V. Isler, S. Kannan, and S. Khanna. “Randomized Pursuit-Evasion in a Polygonal Environment”. IEEE Trans. on Robotics and Automation, 5(21):864--875, 2005.
V. Isler, S. Kannan, and S. Khanna. “Randomized Pursuit-Evasion with Local Visibility”. SIAM Journal on Discrete Mathematics, 1(20):26--41, 2006
41
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Isler
42
Probabilistic searchAlgorithms and theorems about capture with high probabilitySearch on graphs: evader has local visibilityevader and pursuer move simultaneously
Search on polygonsThe lion-and-man game (geometric version of the cops-and-robbers game)
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

PE in polygonal regions
Two lions can capture the man in any simply-connected polygon (Isler).
A single lion can capture the man in any simply-connected polygon in finite time (Isler).
In polygons with obstacles, multiple pursuers are necessary. (Recently, Bhadauria et al. (2010) showed that three lions
can capture the man in any polygon) polygonal environments may require
recontamination to clear with the minimal number of searchers.
43
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
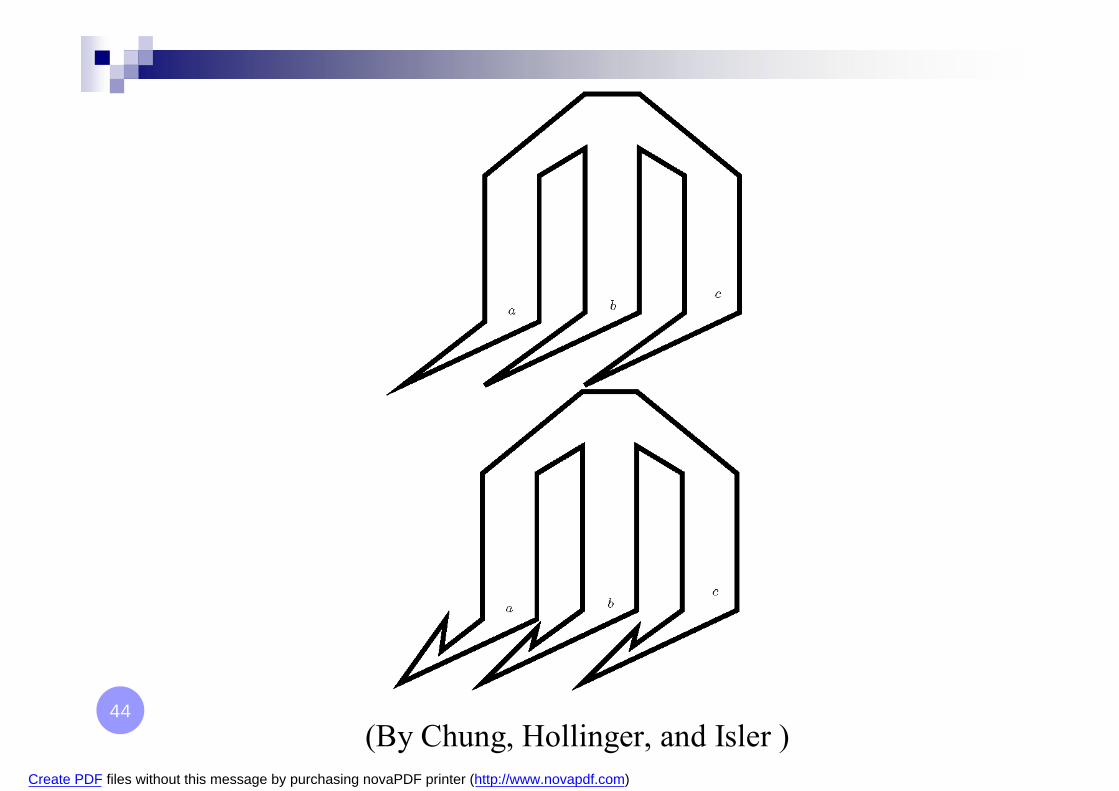
(By Chung, Hollinger, and Isler )44
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

(By Lavalle et al. )45
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Related Work on Probabilistic Graph Search
Adler, M. and Racke, H. and Sivadasan, N. and Sohler, C. and Vocking, B., Randomized pursuit-evasion in graphs, Combinatorics, Probability and Computing, vol. 12, pp.225--244, 2003.
Alpern, S. and Gal, S., The theory of search games and rendezvous, 2003.
46
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Gerkey, Thrun and Gordon
Brian P. Gerkey, Sebastian Thrun, and Geoff Gordon. "Visibility-based pursuit-evasion with limited field of view". Intl. Journal of Robotics Research, vol.25, pp.299-316, 2006.
Brian P. Gerkey, Sebastian Thrun, and Geoff Gordon. "Parallel stochastic hill-climbing with small teams". In Multi-Robot Systems: From Swarms to Intelligent Automata, Vol. 3, pp. 65-77, Springer, 2005.
47
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Gerkey, Thrun and GordonPE in polygonal environments, visibility-based discretizations
In the first paper: Visibility-based PE is extended to a limited field of view New φ –searcher (instead of the k-searcher) Finding the minimal number of φ-searchers is NP-complete Complete algorithm for a single φ-searcher.
In the second paper: Market-based algorithms, heuristics and stochastic action selection They address difficult multi-robot problems The PARISH algorithm Benchmark: visibility-based PE
48
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Hollinger and Kehagias
49
Guaranteed Search (Also Efficient Search)G. Hollinger, S. Singh, J. Djugash, and A. Kehagias, "Efficient multi-robot search for a moving target," International Journal of Robotics Research, vol. 28, pp. 201-219, 2009. A. Kehagias, G. Hollinger, and S. Singh, "A graph search algorithm for indoor pursuit/evasion," Mathematical and Computer Modeling, vol. 50, pp. 1305-1317, 2009.A. Kehagias, G. Hollinger, and A. Gelastopoulos, "Searching the nodes of a graph: Theory and algorithms," ArXiv Repository, Tech. Rep. 0905.3359G. Hollinger, A. Kehagias, and S. Singh, "GSST: Anytime guaranteed search," Autonomous Robots, vol. 29, pp. 99-118, 2010. G. Hollinger, A. Kehagias, and S. Singh, "Improving the efficiency of clearing with multi-agent teams," International Journal of Robotics Research, vol. 29, no. 8, pp. 1088-1105, 2010. G. Hollinger, "Search in the physical world," Ph.D. dissertation, Robotics Institute, Carnegie Mellon University.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Characteristics of our approach
50
Mainly indoor environments (can also handle outdoor).Simple visibility model, simple discretization of environment.Cells nodes, evader lives in the nodes (node search).Evader is invisible, arbitrarily fast, omniscient.Goal: minimal clearing searchSearch must be “rooted” and “internal”Search should be monotone and connected (but we also study nonmonotone and disconnected)Our algorithms use tree search and Barriere’s algorithmGSST (Guaranteed Search by Spanning Trees)G-GSST (Guardless GSST)
Our algorithms use tree search and Barriere’s algorithm
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Discretization (Indoor)
51
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Discretization (Indoor)
52
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Discretization (Outdoor)
53
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Notation
54
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
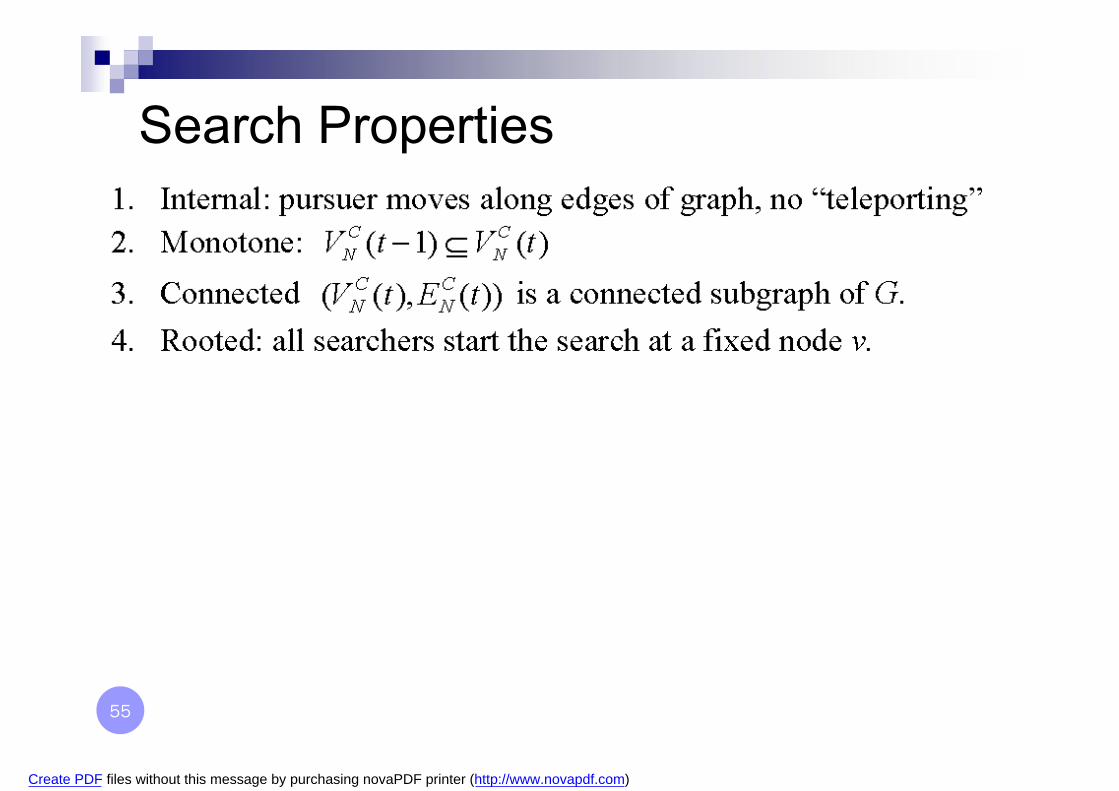
Search Properties
55
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
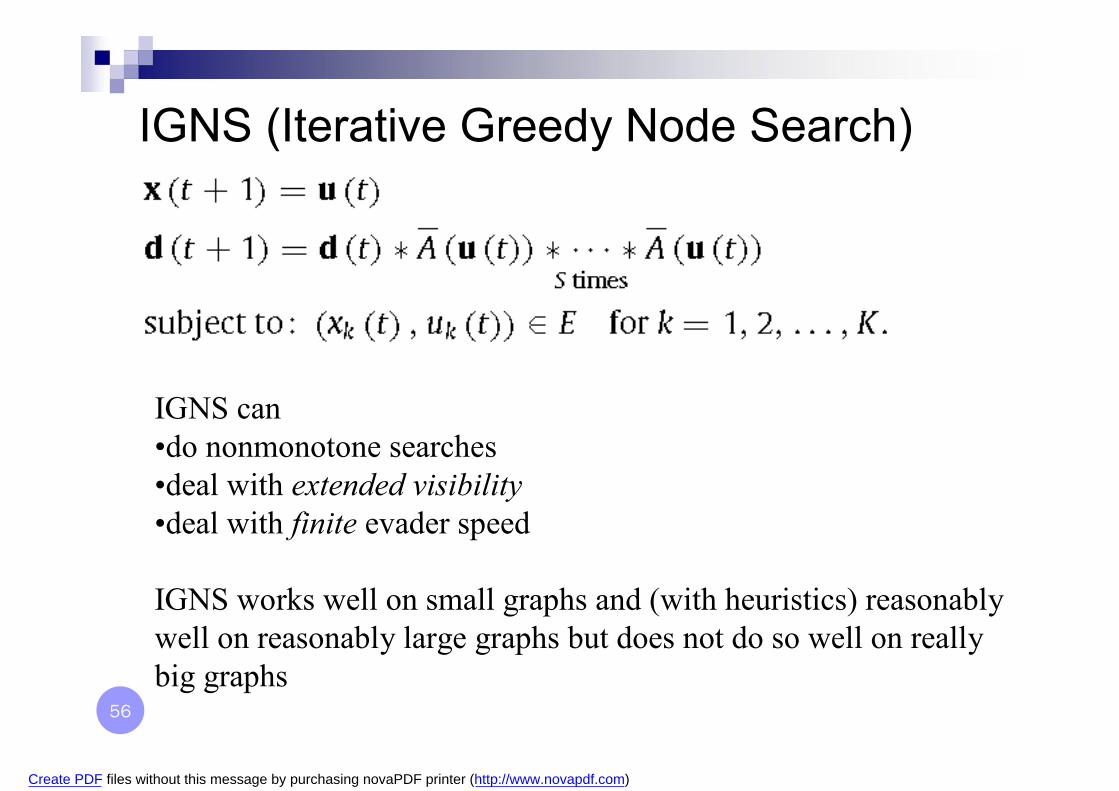
IGNS (Iterative Greedy Node Search)
56
IGNS can •do nonmonotone searches•deal with extended visibility•deal with finite evader speed
IGNS works well on small graphs and (with heuristics) reasonablywell on reasonably large graphs but does not do so well on really big graphs
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

57
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Graph Search by Spanning Trees (GSST)
58
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
59
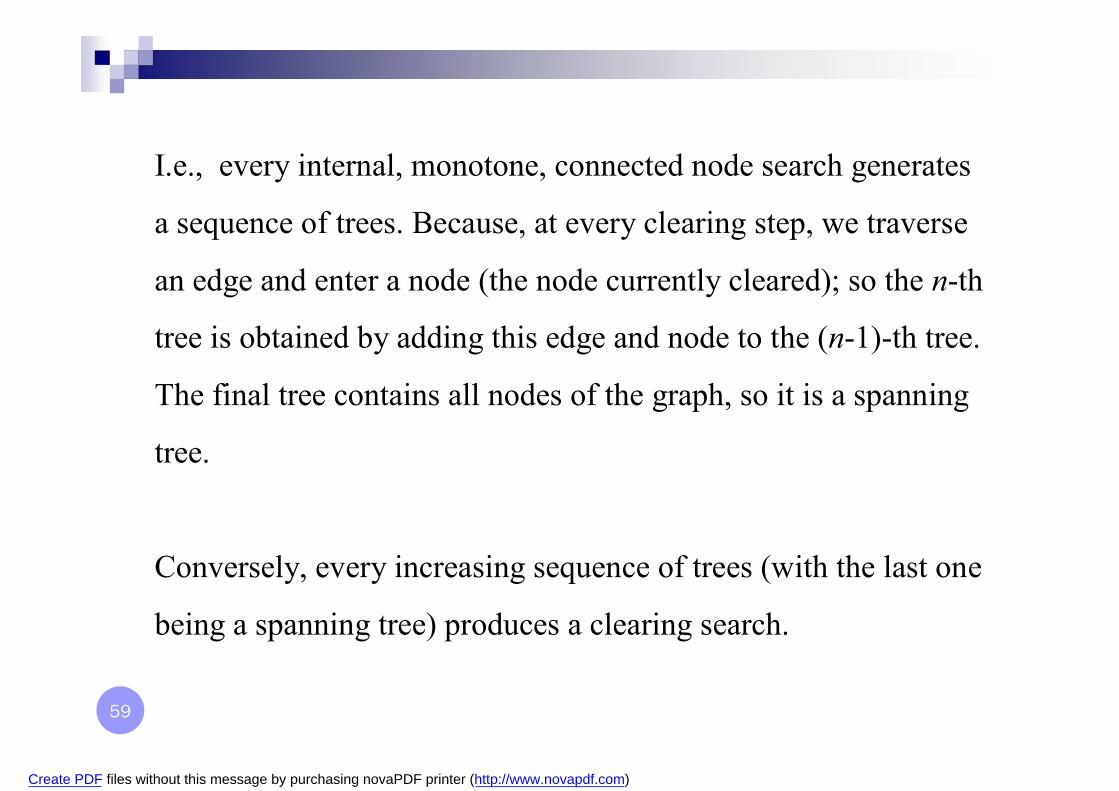
I.e., every internal, monotone, connected node search generates
a sequence of trees. Because, at every clearing step, we traverse
an edge and enter a node (the node currently cleared); so the n-th
tree is obtained by adding this edge and node to the (n-1)-th tree.
The final tree contains all nodes of the graph, so it is a spanning
tree.
Conversely, every increasing sequence of trees (with the last one
being a spanning tree) produces a clearing search.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

60
The basic ideas of GSST are these:
We can generate a spanning tree of G quickly.
We can (IMC-) search the spanning tree quickly using Barriere’s
algorithm;
Clearing the tree does not imply clearing the original graph. But
if we use extra searchers (guards) who block recontamination by
guarding all frontier nodes (i.e. clear nodes which neighbor dirty
nodes) and then clearing the tree will also clear the graph.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
61
So GSST does the following:
it randomly generates a large number of spanning trees;
for each tree
it finds a clearing schedule using Barriere’s algorithm;
it applies the schedule to the graph using additional guards
records the number of searchers (+guards) used by the
extended schedule
after all trees have been used, we select the (expanded) schedule
which the smallest total number of searchers.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
62
GSST has the following attractive features
It always produces a clearing schedule
It is an anytime algorithm
Scales linearly
Produces minimal schedule with arbitrarily high probability
Distributed, decentralized
Low communication bandwidth
Implicit coordination
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

63
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

The SelectEdge subroutine
64
GSST-L: labeled traversal. The labeling of the underlying spanning is used deterministically to guide the search (see Algorithm 4.5).GSST-R: randomized traversal. The underlying spanning tree is traversed randomly. The labeling is not used.GSST-LW: label-weighted traversal. The underlying spanning is traversed in a randomized manner with weights determined by the labeling.GSST-LD: label-dominated traversal. Subtrees of the graph are deterministically cleared as available and other moves are determined randomly.GSST-LDW: label-dominated/weighted traversal. Subtreesof the graph are deterministically cleared as available, and other clearing moves are determined in a randomized manner with weights determined by the labeling.
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

GSST Videos
65
auro10_1.mp4, auro10_2.mp4
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

66
Indoor environments
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

GSST generates 100,000 schedules in under a minute (often under 30 seconds) on these maps.
67
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Anytime Behavior
68
Anytime: some solution immediately available, better solutions later
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Number of searchers achieved by GSST
69
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Comparison of attained search numbers
70
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Guardless GSST
What if we have K searchers with K>sn(G) ? We should be able to do better (?). Use Barriere labeling to guide groups of searchers
into simultaneously cleared subgraphs The searchers follow the edges with the lowest B-
labels into areas of the graph that require fewer searchers to clear
71
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

72
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

73
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

74
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Probabilistic search
Maximize probability of capture of Markovian evaderOf non-omniscient evader with finite speed
Select pursuer moves randomly
75
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Efficient Search
Search in a graph for a Markovian evader Our starting point was Zadeh and POMDP. But POMDP is intractable (or too slow) So we follow a different approach
76
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

-----------------------------------------------------------------------FHPE+SA Algorithm------------------------------------------------------------------------For t = 0, 1, 2, …For k=1 to KLet =End ForEnd for-----------------------------------------------------------------------
Plan sequentially the path of each searcher to maximize
77
1( ... ) , :tK k
UF A A Pr k t p t e t
( 1: )kA t t d
11:arg max 1: ... 1: ... 1: )k k KA t t d F A t t d A t t d A t t d
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Efficient Search
78
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Efficient Search
79
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Efficient Search Videos
80
ijrr08_1.mpg, ijrr08_2.mpg
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Combined Efficient/Guaranteed Search Split the Searchers into Efficient and Guaranteed Videos: ijrr10_1.mpg, ijrr10_2.mpg
81
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Combined Search Algorithm
82
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Constrained Search Algorithm
83
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Gsearch GUI: Our Software for Node Searchhttp://users.auth.gr/~kehagiat/KehagiasSoftware.htm
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

SAT Reduction of Guaranteed Search
85
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
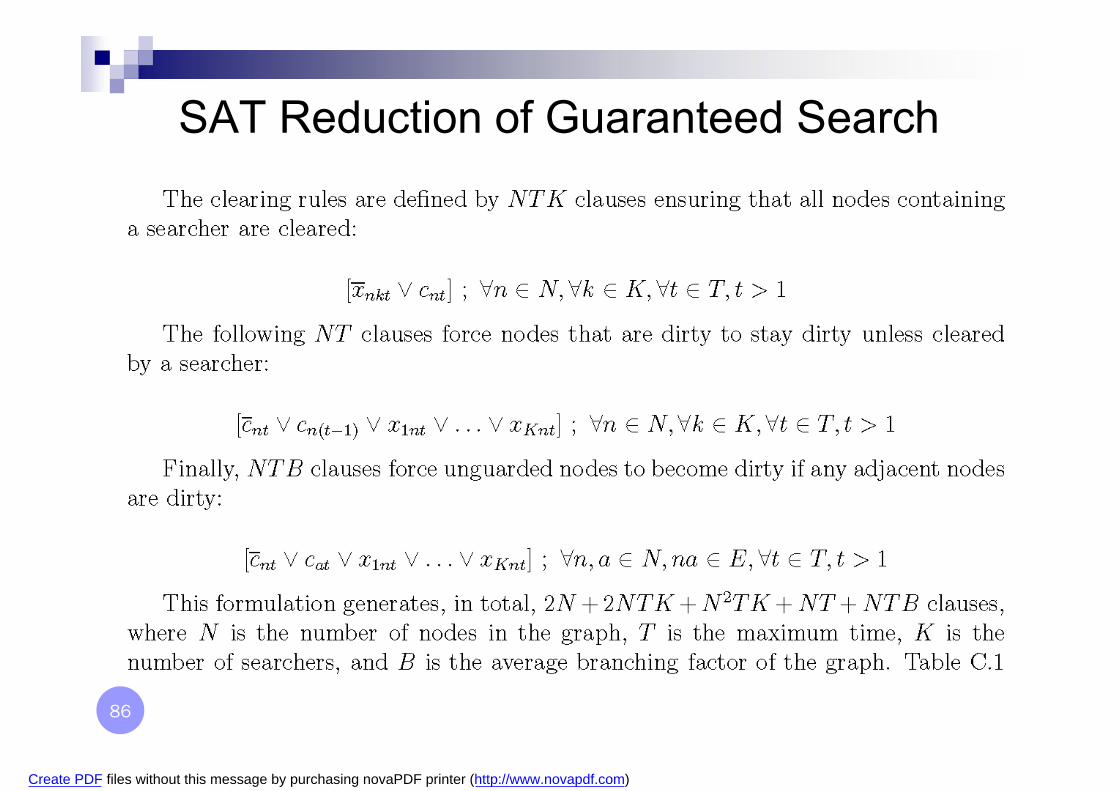
SAT Reduction of Guaranteed Search
86
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

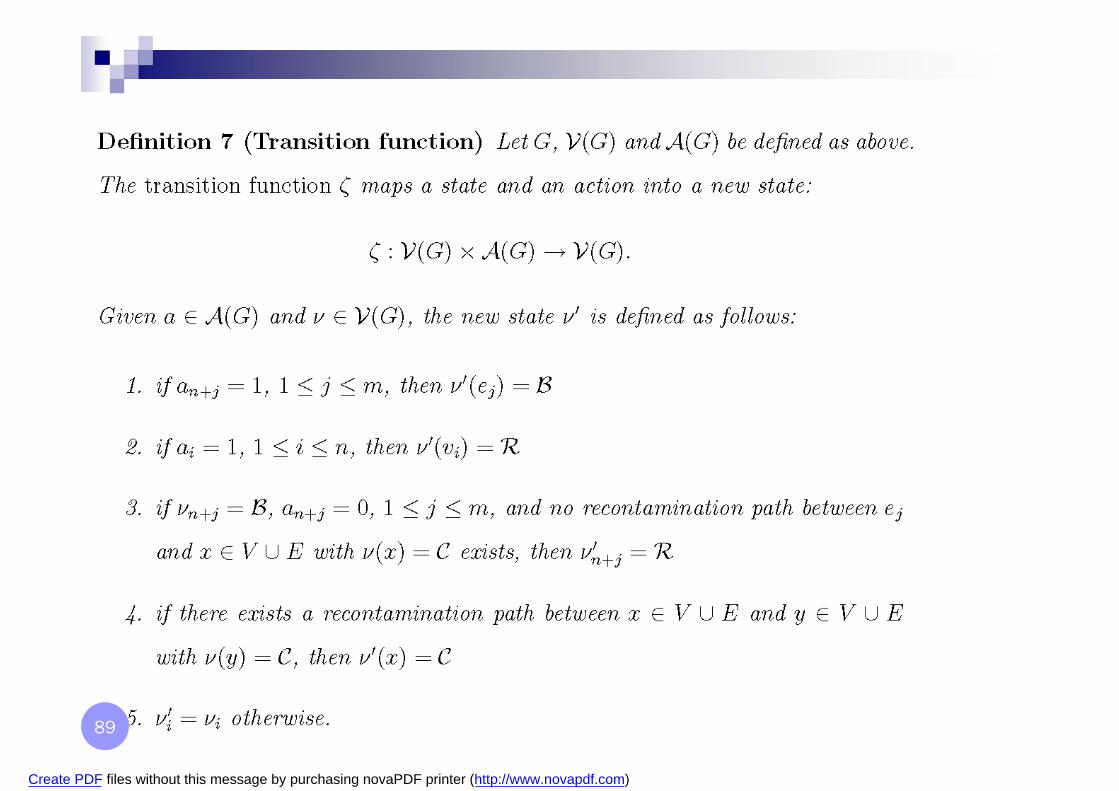
Kolling and CarpinA somewhat different formulation of PE yields the Graph Clear problem.
Nodes are rooms, edges are doors between the rooms. The evader lives in the nodes. But … the pursuers can be in either the
nodes or edges. Node states: dirty, clear. Edge states: dirty, clear, blocked. Actions: block edge, sweep node. generally each such operation requires
more than one pursuers. (So we have weighted nodes and edges.) There is a transition function, which allows simultaneous moves.
In short, it is a different problem from both node search and edge search
87
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

A. Kolling, S. Carpin. "Pursuit-Evasion on Trees by Robot Teams". IEEE Transactions on Robotics, vol. 26, pp.32-47, 2010
A. Kolling, S. Carpin. "Multi-Robot Pursuit-Evasion without Maps", ICRA 2010, pp.3045-3051, 2010.
A. Kolling, S. Carpin. "An improved algorithm for the GRAPH-CLEAR problem". Technical Report 2007-03. School of Engineering, University ofCalifornia, Merced. 2007.
A. Kolling, S. Carpin. "On Weighted Edge-Searching". Technical Report2009-01. School of Engineering, University of California, Merced, 2009.
A. Kolling, S. Carpin. "Multi-robot surveillance: an improved algorithm forthe GRAPH-CLEAR problem". ICRA 2008, pp.2360-2365, 2008.
A. Kolling, S. Carpin. "Solving Pursuit-evasion Problems with Graph-Clear: an Overview". Workshop on "Search and Pursuit/Evasion in thePhysical World". ICRA 2010
A. Kolling, S. Carpin. "Probabilistic Graph Clear". ICRA 2009, pp.3508-3514, 2009.
A. Kolling. "Multi-robot Pursuit-Evasion". PhD Thesis. U. of California at Merced, 2009.
Kolling and Carpin
88
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
8989
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Surveillance Graph
90
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

91
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Theoretical Results
92
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Algorithm
93
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Kolling’s Other AlgorithmsThere are also the following.
1. An algorithm to find (not necessarily optimal) non-contiguous search schedules on trees.
2. A hybrid algorithm which splits optimally V into V1 and V2, applies contiguous search to V1 and non contiguous search to V2.
General graphs are treated by optimally clearing a tree and using guards to block cycles.
94
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Differences between ES and GC
In ES: guard/slide; contamination is stopped by guarding nodes.
In GC: block/sweep, contamination blocked by guarding edges
Sweep does not require blocking evader from re-entering.
After sweeping we still need to guard edges (entrances)
95
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Kolling’s comments on Barriere’s Proof
96
Barriere says it needs 12 searchers.
Actually it can be cleared with 8!
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Additional Results
Probabilistic GC: sensors may yield false negatives (i.e., miss the evader)
The Line Clear problem: visibility-based PE on polygonal environments, with limited visibility sensors.
Algorithm for producing good surveillance graph (from a given map)
97
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Borie, Daniel, Koenig, Tovey K. Daniel, R. Borie, S. Koenig and C. Tovey. ESP: Pursuit Evasion on Series-
Parallel Graphs [Poster Abstract]. In Proceedings of the International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2010
R. Borie, C. Tovey and S. Koenig. Algorithms and Complexity Results for Pursuit-Evasion Problems. In Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI), 59-66, 2009
R. Borie, C. Tovey, K. Daniel and S. Koenig. ESP: Pursuit Evasion on Series-Parallel Graphs. Technical Report, Department of Computer Science, University of Southern California, Los Angeles (California), 2009
ESP: Pursuit Evasion on Treewidth-2 Graphs
They study edge search on graphs. While they belong to the robotics community (kind of) their work is more theoretical
Especially, they study minimum time and minimum distance ES.
They develop ESP (Evasion on Series-Parallel Graphs) a heuristic, approximate algorithm which solves large problems on series-parallel (that is, treewidth-two) graphs quickly and with small costs.98
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

BDKT Theorems
99 (By Tovey, Borie, and Koenig )Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

The 2010 ICRA Workshop onSearch and Pursuit/Evasion in the Physical World
100Panel discussion5:00pm-5:30pm
Belief-driven Cooperative Search and TrackingProf. Tomonari Furukawa, Virginia Tech
4:30pm-5:00pm
Algorithms and Complexity Results for Pursuit-Evasion ProblemsProf. Sven Koenig, University of Southern California
4:00pm-4:30pm
Coffee break (posters)3:30pm-4:00pm
Solving Pursuit-evasion Problems with Graph-Clear: an OverviewProf. Stefano Carpin, University of California at Merced
3:00pm-3:30pm
Interactive Multi-Robot Planning and Multi-Agent SimulationProf. Dinesh Manocha, University of North Carolina at Chapel Hill
2:30pm-3:00pm
Motion Planning for People Tracking in Uncertain and Dynamic EnvironmentsProf. David Hsu, National University of Singapore
2:00pm-2:30pm
Lunch (posters)12:30pm-2:00pm
Poster spotlights (posters [5-9])12:00n-12:30pm
Bio-inspired Risk Avoidance and Dynamic Coverage Control for Autonomous Agent TeamsProf. Karl Hedrick, University of California at Berkeley
11:30am-12:00n
Bayesian Nonparametrics and Forward SearchProf. Nicholas Roy, Massachusetts Institute of Technology
11:00am-11:30am
Coffee break (posters)10:30am-11:00am
Poster spotlights (posters [1-4])10:10am-10:30am
Strategies for Surveillance of Moving TargetsProf. Seth Hutchinson, University of Illinois at Urbana-Champaign
9:40am-10:10am
Pursuit-evasion with Networked RobotsProf. Gaurav Sukhatme, University of Southern California
9:10am-9:40am
Welcome by Geoff Hollinger, Volkan Isler, and Timothy H. Chung9:00am-9:10am
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

The 2010 ICRA Workshop onPoster Sessions
101
A Decision-Theoretic Framework to Select Effective Observation Locations in Robotic Searchand Rescue Scenarios
Demonstration of Multi-Robot Search and Secure
Fault-Tolerant Multi-Robot Area Coverage with Limited Visibility
Intelligent Pursuit & Evasion in Unknown Environments against Human Players
Multi-Robot Teamwork in Multistatic Sonar
Online Probabilistic Pursuit of Adversarial Evaders
Optimal Strategies to Evade Jamming in Heterogeneous Mobile Networks
Solving Pursuit-Evasion Problems on Height Maps
Visibility-Based Strategies for Searching and Tracking Unpredictable Coherent Targets AmongKnown Obstacles
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

UAV (Unmanned Aerial Vehicle) Search
102
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Hegazy, T. and Ludington, B. and Vachtsevanos, G., “Reconnaissance and surveillance in urban terrain with unmanned aerial vehicles”, IFAC World Congress, pp. 872--879, 2005.
Hegazy, T. and Vachtsevanos, G., “Dynamic autonomous agent placement for target tracking based on target motion models”, Networking, Sensing and Control 2005, pp.383--388, 2005.
Frew, E. et al., “Vision-based road-following using a small autonomous aircraft”, Aerospace Conference 2004, vol. 5, pp.3006--3015, 2004.
Stephen T. Nuske, Michael Dille, Benjamin P. Grocholsky, and SanjivSingh, “Representing Substantial Heading Uncertainty for Accurate Geolocation by Small UAVs”, AIAA Guidance, Navigation, and Control Conference, August, 2010.
Bourgault, F. and Furukawa, T. and Durrant-Whyte, H.F., “Coordinated decentralized search for a lost target in a Bayesian world”, IROS 2003, vol. 1, pp. 48--53, 2003.
103
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
“Dimensions” of the PE problem Type of environment (outdoor/indoor, continuous/discrete) State space of the evader and pursuers (continuous/discrete,
location/probability) Behavior of the evader (stationary, random, adversarial) Speed of the evader (infinite, finite) Visibility of the evader (visible, visible-within-range, invisible, prob.
visible) Additional properties of the evader (omniscient or not, active/lazy,
finite/infinite speed, …) Type of search (edge search, node search, mixed search)
E-clear/n-clear, e-guarded / n-guarded etc. Target function (number of searchers, time to clear, distance to clear, time
average of clear area) Target function (average, worst case, maxmin) Constraints on the search schedule (teleporting or internal,
connected/disconnected, monotone/nonmonotone, rooted or not, … ) Strong monotonicity: a clear edge / node is never recontaminated (but is this
unambiguous? Depends on rules of the game, will be discussed later) Weak monotonicity: the size of the clear set never decreases.
104
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Comparison of NS and ES They are not the same 01,0 1, 1 2, 2 4, 4 1 is node clearing, but not edge
clearing
105
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

106
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

107
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

108
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Desiderata 1Algorithms for edge/node search (and implementation)
Connected search (for general graphs) Constrained search (for trees, for general graphs) Search on weighted graphs (for general graphs) Minimum time / distance search Finite speed / limited visibility evader Parallel Moves Approximate algorithms with performance guarantees Probabilistic search Game theoretic search 109
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Desiderata 2 Theory for minimum time / distance (with given
number of searchers) Theory for parallel moves Consistency Rules for node/edge search games in dynamic
equation form Rules for a super game (evader can live on both edges
and nodes) GSST: What are good spanning trees?Why do some GSST variants do better on certain
families of graphs?110
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Hein Roehrig’s code forTW and PW decomposition http://hein.roehrig.name/dipl/ A M.Sc. thesis and code to perform TW and PW
decomposition Implements the Bodlaender-Kloks algorithms
Bodlaender, H.L. and Kloks, T. “Efficient and constructive algorithms for the pathwidth and treewidth of graphs”, J. Algorithms, vol.21, pp.358--402, 1996
We were never able to compile it! (1998 SW tools)
111
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

112
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

113
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

Questions Differences between weak / regular / strong monotonicity? What is node search? What is the connection with edge
search? With mixed search? Can non-monotone node search improve sn on trees? On
general graphs? What is a big graph? For what size graphs is Bodlaender’s
algorithm viable? Is Kolling’s comment on Barriere’s proof known? Is it
interesting? Are the Koenig results interesting? What is a good discretization of a polygon? (E.g. to yield
smaller graph search number) What could GS offer to efficient search? Can we translate edge clear to node clear at an arbitrary time
(w/o induction)?114
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)
Questions GSST for edge search? Can parallel moves improve sn on trees? On general
graphs? For node search? For edge serach? Does recontamination help in parallel moves
(edge/node) search? Does recontamination help in extended visibility
(edge/node) search?
115
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

116
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)

117
Create PDF files without this message by purchasing novaPDF printer (http://www.novapdf.com)