robotic inspection tool development for double shell tanks...
TRANSCRIPT

ROBOTIC INSPECTION TOOL
DEVELOPMENT FOR DOUBLE
SHELL TANKS AT HANFORD
Dwayne McDanielFlorida International University
RCNET Workshop & Professional Development
July 13th – July 14th

TEAM MEMBERS
PRINCIPLE INVESTIGATOR: Leonel Lagos, Ph.D., PmP
PROJECT MANAGER: Dwayne McDaniel, Ph.D., P.E.
TECHNICAL STAFF: Anthony Abrahao, William Tan, Ph.D.
DOE FELLOWS: Michael DiBono, Ryan Sheffield, John Conley, Sebastian
Zanlogo
Work supported by: U.S. Department of Energy Office of
Environmental Management under Cooperative
Agreement # DE-EM0000598
Advancing the research and academic mission of Florida International University

OUTLINE
Background
Proposed Inspections
Pneumatic Crawler
Testing and Evaluation
Magnetic Miniature Rover
Testing and Evaluation
Path Forward
Advancing the research and academic mission of Florida International University

TASK DESCRIPTION
Advancing the research and academic mission of Florida International University
1.) Refractory
Air Slots through
the Annulus
2.) 6” Leak
Detection
Piping
3.) 4” Air
Supplying
Piping

PROPOSED INSPECTION
Advancing the research and academic mission of Florida International University

AIR SUPPLY LINE INSPECTION TOOL
Remote controlled
Video feedback recorded for future analysis
Radiation hardened (~80 rad/hr)
High temperature environment (~170 ° F)
To be used in pipes and fittings with 3” and 4” diameters
Will need to turn through elbows, bends, and transitions
Will need to crawl through vertical runs
Advancing the research and academic mission of Florida International University
OBJECTIVE: To develop an inspection tool that crawls through the air supply pipe that leads to the central plenum of the primary tank of the DSTs at Hanford and provides video feedback
DESIGN PARAMETERS:

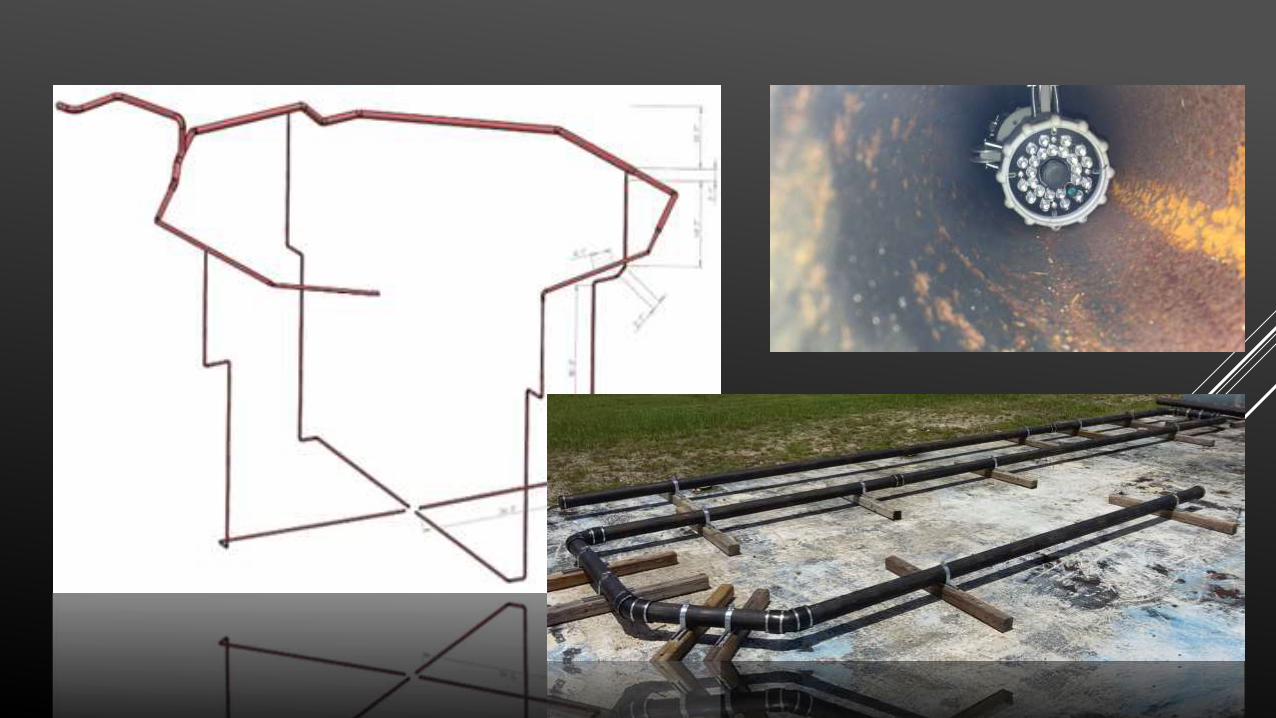
INSPECTION PATH (AY-102)
Advancing the research and academic mission of Florida International University
The proposed
inspection distance
will be approximately
100 feet with a
significant portion
being gravity fed
The path is made up
of 40 pipes which are
3” and 4” in diameter,
with reducers and
several elbows

CONCEPTUAL DESIGN
Advancing the research and academic mission of Florida International University
Modular design composed of
interchangeable modules
connected with rigid links
This gives potential to
be customized for
specific tasks with the
addition of extra
modules
Examples include:
-Instrumentation
-Material Sampling
-Pipe Repair
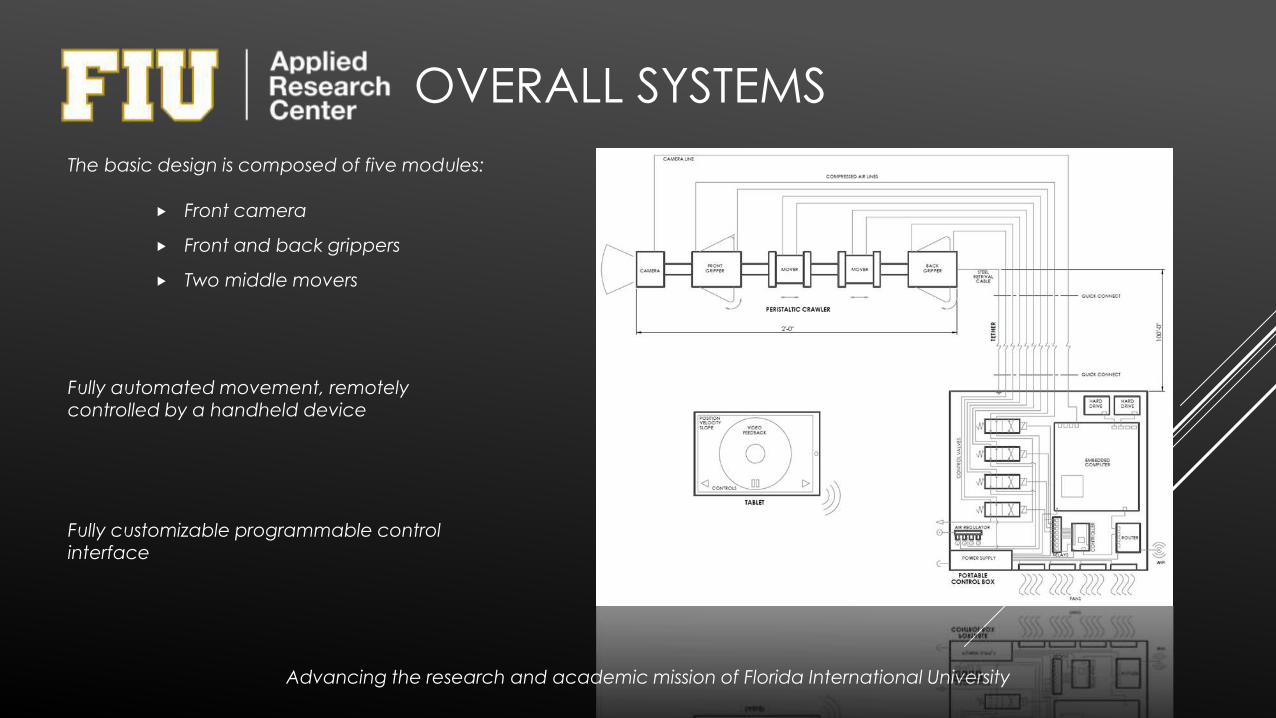
OVERALL SYSTEMS
Front camera
Front and back grippers
Two middle movers
Advancing the research and academic mission of Florida International University
The basic design is composed of five modules:
Fully automated movement, remotely controlled by a handheld device
Fully customizable programmable control interface

THE DESIGN
Advancing the research and academic mission of Florida International University
Pneumatic Actuators to emulate the
contractions of the peristaltic movements
Movement does not require embedded electronics and
electric actuators
Suitable for highly radioactive environments with potential
exposure to flammable gases

GRIPPER MODULE
Advancing the research and academic mission of Florida International University
Maximizing the strength of the gripper is a major
factor in the design
Stronger grip would allow the device to carry additional
modules, and to inspect longer pipelines

BENCH SCALE TESTBED
Advancing the research and academic mission of Florida International University
The current grippers are
able to provide a
maximum gripping
force of ~40 lbs
This is also the maximum force
with which the mover modules
can propel the crawler in the
forward direction

BENCH SCALE TESTBED
Advancing the research and academic mission of Florida International University
Based on
maneuverability
bench scale
tests, the crawler
has great
potential to
accomplish the
proposed
inspection

Advancing the research and academic mission of Florida International University

MOVING FORWARD
INSTRUMENTATION MODULE
An embedded computer
A tether load cell
Other sensors (temperature, humidity, and radiation)
Advancing the research and academic mission of Florida International University
Monitor the dynamic performance during full
scale tests
Design additional modules carrying: Plant force sensitive resistors
in the pads of the gripping
mechanism
+ +=


Advancing the research and academic mission of Florida International University
REFRACTORY SLOT INSPECTION TOOL
Travel through small cooling channels with dimensions as small as 1.5” x 1.5”
Remote controlled
Inserted through a riser to the annulus floor
Live video feedback
Radiation hardened (~80 rad/hr)
High temperature environment (~170 ° F)
Must not subject the channel walls to pressures greater than 200 psi (the compression strength of the refractory material)
Navigate ~ 50 feet to the tank center, while maneuvering four 90 ° turns (first phase – 17 feet, no turns
Tethered
Advancing the research and academic mission of Florida International University
OBJECTIVE: To develop an inspection tool that navigates through the refractory pad air channels under the primary liners of the DST’s at Hanford while providing live video feedback
DESIGN PARAMETERS:

INITIAL DESIGNS
Use of tank-tracks for increased maneuverability
Upside down travel to avoid refractory debris (via magnets)
Advancing the research and academic mission of Florida International University
GENERAL APPROACH
Insufficient pulling force
Inadequate clearance with tank surface
Cumbersome reassembly
Difficulty overcoming obstacles (small wheels)
EARLY PROTOTYPES

BENCH SCALE TESTING
Device weight: 0.18 lb
Average pull force: 4.75 lb
Tests performed at: 5V
Power/Weight ratio: 26
Motor rated for 3-9 V
Maximum Pull
Force
Advancing the research and academic mission of Florida International University
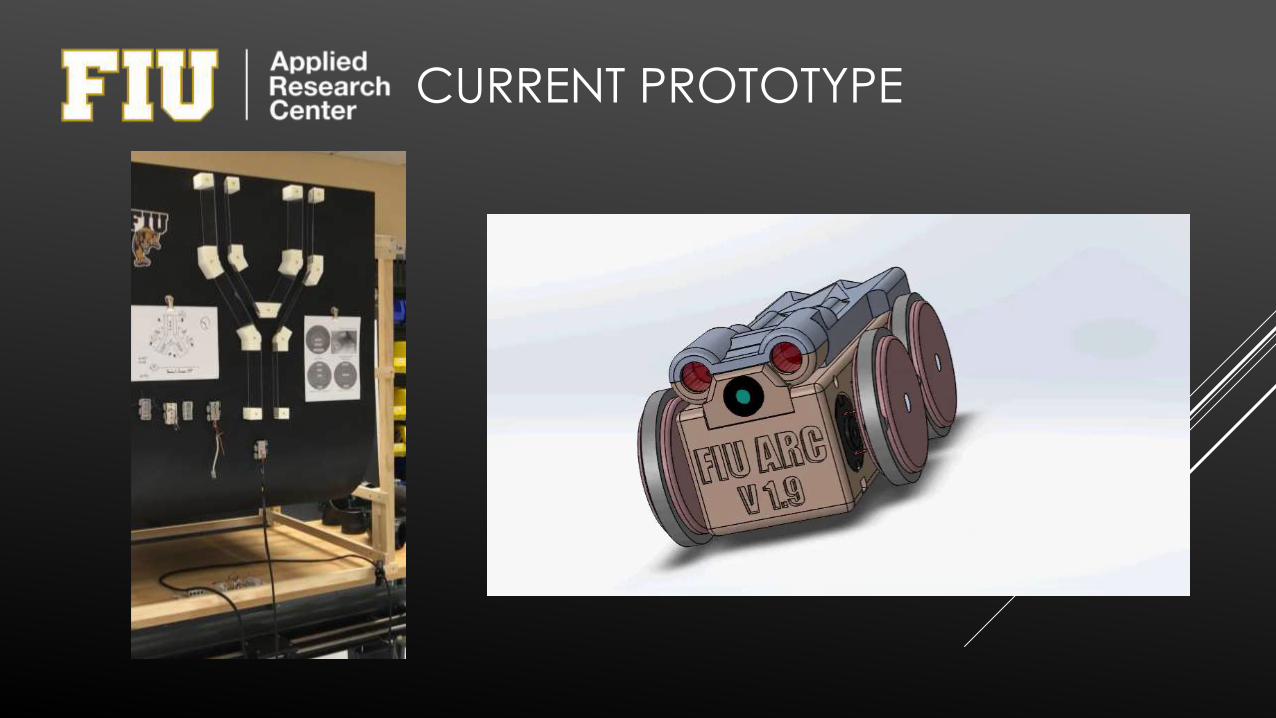
CURRENT PROTOTYPE

BENCH SCALE TESTING
Advancing the research and academic mission of Florida International University
FIRST 17 FEET
2 90 DEGREE TURNS
8” BETWEEN EACH TURN
1.5” X 1.5”

ALTERNATIVE DESIGN
Explore first 17 feet
Advancing the research and academic mission of Florida International University
Make 90 degree turn

CABLE MANAGEMENT
Goal: To design a system to let out/recover the tether of the rover with
precision
Advancing the research and academic mission of Florida International University

MOVING FORWARD
SEMI-AUTONOMOUS DRIVING
Advancing the research and academic mission of Florida International University

SECTIONAL FULL-SCALE MOCKUP
Advancing the research and academic mission of Florida International University
Objective: To design a full-scale sectional
mockup of the DST to evaluate inspection
technologies and robotic devices.
Modular design: various refractory and drain line
configurations, different plate thicknesses,
predefined defects.
Dimensions 38’ length x 8’ width x 12’ height
Simulate inspections of refractory pad,
primary liner, drain slots, secondary liner
and central plenum.
Evaluate tank integrity – corrosion, wall
thickness, defects, welds, cracks

MOVING FORWARD
Develop full-scale mock up test bed
Develop delivery mechanism for easy development
Provide feedback of other inspection parameters (temperature, relative humidity,
radiation, etc.)
Redesign a radiation hardened version
Scale the design for smaller pipe sizes
Advancing the research and academic mission of Florida International University
Develop full-scale mock up test bed
Develop delivery mechanism for easy development
Provide feedback of other inspection parameters (temperature, relative humidity, radiation, etc.)
Redesign a radiation hardened version
Autonomous deployment/maneuvering of inspection tool
Crawler
Rover

SENSOR INTEGRATION
Advancing the research and academic mission of Florida International University
Crawler
Incorporation of temperature
and humidity sensors into the
front module.
Creation of a new module that
will be capable of surface
mapping, ultrasound and
radiation sensing.

SENSOR INTEGRATION
Advancing the research and academic mission of Florida International University
Rover
Development of a removable
hood for the system that can be
customizable to incorporate
temperature, humidity and
radiation sensors. iButton sensor for temperature and humidity
Radiation sensor for measuring beta and gamma radiation