roboteam 9/1/2011 preformed by:costia parfeniev, boris pinzur supervised by: kobi kohai
TRANSCRIPT

RoboTeamRoboTeam
9/1/20119/1/2011
Preformed by:Preformed by: Costia Parfeniev, Boris PinzurCostia Parfeniev, Boris Pinzur
Supervised by: Supervised by: Kobi KohaiKobi Kohai

AgendaProject GoalsDesignZigbee™ IntroductionDetailed ArchitectureModules structure and StatusShort SummaryFuture Tasks

Project goalsDevelop a wireless communication
infrastructure among several robots for future projects.
The project will provide a simple software API for future reuse.
The design shall allow using more than 2 robots by revising the application.
Create an autonomous system of two robots.Demonstrate the ability to coordinate
movement and activity using the Zigbee™ wireless communication.

DesignUsing a standard 2 level robot base.
Which includes:Chassis2 Servo motorsWheel encoders
MSP430 as the main application processor.EZ430-RF2480 board as the communication
module.A rotating sensors turret with:
2 IR distance sensors.IR LED beacon.IR photodiode.

Zigbee ™ ExplainedThe Zigbee protocol was created for low-
power, low-resource devices, with an easy to use API.
Supports several network topologies A Zigbee network consists of a coordinator
and several routers or end devices
For example:Coordinator - BlackRouter - RedEnd Device - White

Zigbee ™ HWPC Interface:
End Device
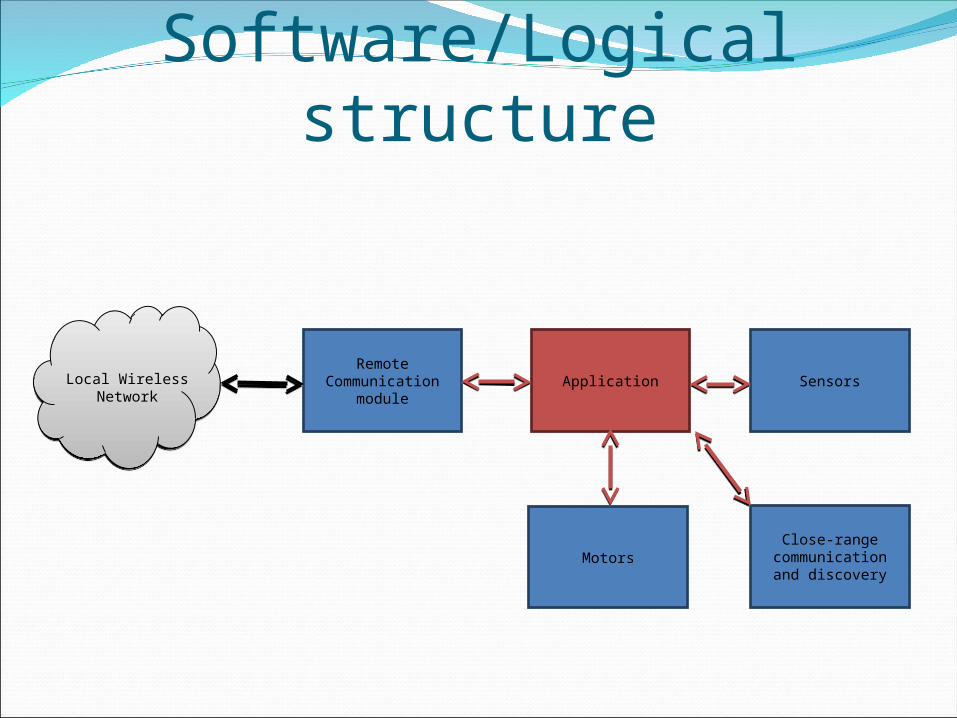
Software/Logical structure
ApplicationRemote
Communication moduleLocal Wireless NetworkLocal Wireless Network Sensors
MotorsClose-range
communication and discovery

Physical structure part 1Zigbee board
EZ430-RF2480Zigbee board
EZ430-RF2480
CC2480 MSP430F2274
MSP430 BoardMSP-TS430PZ100
MSP430 BoardMSP-TS430PZ100
MSP430FG4618
Power Supply
MobilityMobility
Left Servo Right Servo
Right EncoderLeft Encoder

Physical structure part 2MSP430 Board
MSP-TS430PZ100MSP430 Board
MSP-TS430PZ100
MSP430FG4618
SensorsSensors
Turret Servo
Forward IR Distance Sensor
Back-Facing IR Distance Sensor
Close range DiscoveryClose range Discovery
IR LED
Forward IR PhotodiodeBack-Facing IR
Photodiode

Purpose:Establish a network between the robots. Which
will allow coordination and cooperation.Hardware:
EZ430-RF2480Software API (on the MSP430FG4619):
Functions: void initCOMM(void) void COMMresetZB(void)
void COMMsend(addr , buff, len)
Callbacks: void COMMinit(addr) void COMMrecieved(addr, buffer, length)
Remote Communication:

Status:The module is connected to the main MSP430 board.The software API is fully implemented.
Tests performed:EZ430 -> WLAN -> EZ430 -> MSP430MSP430 -> EZ430 ->WLAN -> EZ430 ->MSP430
TBD:Full MSP430 ->MSP430 test.Test the reset function.
Remote Communication

MotorsPurpose: Mobility and control infrastructure.Hardware:
2 servo motors2 encoders
Software API:MOVinit()MOVsetSpeed(speed)MOVRotate(degrees)
Status:Hardware installed.
TBD:Software API implementation.

Turret ServoPurpose:
Setting sensors azimuth.Hardware:
Servo.Software API:
TURinit()TURsetAngle(degrees)TURgetAngle()

SensorsPurpose:Discovery and distance estimation of near-by objects.
Hardware:2 IR distance sensors , mounted on a servo.
Software API:Functions:
SENinit() SENgetMeasure(sensorID)
Callback: SENmeasureRecieved(sensor ID,distance)
Status:A turret prototype is assembled.
TBD:Assemble a second turret.Integrate with the main MSP board.

Close-range DiscoveryPurpose:
Identifying near-by robots.
Hardware:Beacon - IR LED 2 IR photodiodes
Operation:The beacon will transmit the short address of the current
robotWhen the distance sensors identifies a near-by object:
Application should check if the IR photodiodes received any valid ID’s. The application should periodically transmit it’s ID.
If an ID was received the object is a robot and its Zigbee short address is the ID.

Short summaryThe architecture of the entire robot is finalized.The API of the various components is defined.The communication model is fully implemented and
undergoing testing.A first prototype is in its final stages of hardware
assembly and integration.Documentation of the communication module is done.

Development Challenges
Robots environmental orientation
IR Beacon communication
Narrow angle object detection
Demo Application definition

Future TasksImplementing the various API functions.Testing the first prototype as a system.Assembling a second robot, as a replica of the
prototype.Developing an application that will demonstrate the
robot’s capabilities.Writing a project book.

Thank you