review article prognostics and health …downloads.hindawi.com/journals/mpe/2015/793161.pdfreview...
TRANSCRIPT

Review ArticlePrognostics and Health Management A Review onData Driven Approaches
Kwok L Tsui1 Nan Chen2 Qiang Zhou1 Yizhen Hai1 and Wenbin Wang34
1Department of System Engineering and Engineering Management City University of Hong Kong Hong Kong2Department of Industrial amp Systems Engineering National University of Singapore Singapore 1175763Donlinks School of Economics and Management University of Science and Technology Beijing Beijing 100083 China4Faculty of Business and Law Manchester Metropolitan University Manchester M15 6BH UK
Correspondence should be addressed to Wenbin Wang wangwb56126com
Received 1 July 2014 Revised 25 October 2014 Accepted 31 October 2014
Academic Editor Shaomin Wu
Copyright copy 2015 Kwok L Tsui et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Prognostics and health management (PHM) is a framework that offers comprehensive yet individualized solutions for managingsystem health In recent years PHM has emerged as an essential approach for achieving competitive advantages in the globalmarket by improving reliability maintainability safety and affordability Concepts and components in PHM have been developedseparately in many areas such as mechanical engineering electrical engineering and statistical science under varied names Inthis paper we provide a concise review of mainstream methods in major aspects of the PHM framework including the updatedresearch from both statistical science and engineering with a focus on data-driven approaches Real world examples have beenprovided to illustrate the implementation of PHM in practice
1 Introduction
To fulfill the increasing demand on functionality and qualitymodern systems are often built with overwhelming complex-ities These systems are often featured rich electronics andintricate interactions among subsystemscomponents Forexample a typical car consists of about 2000 functional com-ponents 30000 parts and 10 million lines of software code[1]
Additionally extremely high requirements of systemreliability are essential since a single failure can result in catas-trophic consequences Despite every effort made in the pastdisasters keep occurring with profound implications In June2009 the Metro rail crash in Washington DC killed ninepeople and injured dozens more suspiciously due to sensorcircuit ldquoanomaliesrdquo under the rail track [2] Brazil blackoutsin November 2009 affected more than 60 million peopleand shut down everything from subway to light bulbs [3]Despite the explanation attributed to lightning wind andrain it was still believed that ldquothere was obviously some fail-ure either technical or humanrdquo Other examples include the
failure of LED lighting system in Xiamen China twomonthsafter installation although the manufacturer promised fiveyearsrsquo lifespan of their products not to mention the infamoussudden acceleration failures of Toyota automobiles whichhave significantly damaged the companyrsquos profit and reputa-tion [4]
In view of the high impact and extreme costs usuallyassociated with system failures methods that can predict andprevent such catastrophes have long been investigated Appli-cations of developedmethods are not rare in domains such aselectronics-rich systems aerospace industries or even publichealth environment [5 6] In general these methodologiescan all be grouped under the framework of prognostics andhealth management (PHM) Particularly prognostics is theprocess of predicting the future reliability of a product byassessing the extent of deviation or degradation of the prod-uct from its expected normal operating conditions healthmanagement is the process of real timemeasuring recordingandmonitoring the extent of deviation and degradation fromnormal operation condition [7 8] Different from traditionalhandbook based reliability prediction methods (eg US
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 793161 17 pageshttpdxdoiorg1011552015793161
2 Mathematical Problems in Engineering
Department of Defense Mil-Hdbk-217 and Telcordia SR-332(formerly [9])) which assumed that constant hazard rate ofeach component can be tailored by independent ldquomodifiersrdquoto account for various quality operating and environmentalconditions PHM methodologies instead monitor the healthstate in real time and dynamically update the reliabilityfunction (hazard rates) based on in situ measurements andtailored evolution models obtained from historical data Dueto the success of existing PHM methodologies there is noneed to exhibit the growing interests of studying new PHMtechniques and applying PHM to underdeveloped domains
Nevertheless the increasingly complex modern systemspose new challenges on PHM One of the most prominentproblems is called No Fault Found (NFF) problem (relatedterminologies include ldquocannot duplicaterdquo ldquore-test OKrdquo ldquotrou-ble not identifiedrdquo and ldquointermittent malfunctionsrdquo) [10ndash12]particularly in electronic-rich systems As the name sug-gests it refers to the situation that no failurefault can bedetectedreplicated during laboratory tests even when thefailure has been reported in the field [13] NFF issues not onlymake the prognosis and diagnosis extremely difficult butalso can cause skyrocketing maintenance cost As reportedby Williams et al [13] NFF failures account for more than85 of all filed failures and 90 of overall maintenance costsin avionics it is estimated that NFF related activities cost theUS Department of Defense 2sim10 billion US dollars per year[14] Evidently NFF contributes a lot in operational cost inmany different application areas On top of the maintenancecosts potential safety hazards related to NFFs are even morestriking For example both Toyota and National HighwayTraffic Safety Administration (NHTSA) spent quite a longtime to investigate the root causes of sudden accelerationfailures in some car models a problem that might be linkedto 89 deaths in 71 crashes since 2000 according to NHTSA[15] Unfortunately no conclusive finding has been reacheddespite the efforts in trying to repeat the failures in a varietyof laboratory conditions These intermittent faults are alsosuspected to be the main reason for other catastrophes likeWashington Metro crashes and Brazil blackouts
Intermittent faults or NFF problems pose significant bar-riers to apply traditional methods for reliability predictionwhich are often empirical and population based From theaforementioned examples we can find that intermittent faultsare often tightly related to the environmental conditions andoperation histories of the particular individual system Theycan hardly be repeated due to unknown randomdisturbancesinvolved Therefore laboratory testing and assessment canonly provide a reference on the ldquoaveragerdquo characteristics ofthe whole population and are insufficient to provide accuratemodeling and prediction for each individual To reduce themaintenance cost and eliminate safety hazards caused byNFFthe paradigm of PHM needs to shift from empirical to datasupported and from population based to individual based
Companioned with the challenges the fast developmentof information and sensing technology has enabled thecollection of many in situ measurements during operationsand provided the capability of real time datamanagement andprocessing for each individual These advancements provideus great opportunity to develop sophisticated models with
increasing accuracy of prognostics for individual items Forinstance many different types of data during the whole lifecycle of the products can be easily retrieved especially in crit-ical applications These data could include production pro-cess information quality records operation logs and sensormeasurements Moreover unlike manually entered data usedbefore which are slow costly and error-prone most ofcurrent records are automatic accurate and timely entriesdue to the advancements of technologyThe use of Radio Fre-quency Identification (RFID) technology for example is notrare in supply chain distribution network healthcare andeven military applications to provide reliable and timelytracking or surveillance of productscomponents Advancedsensor technologies also enable abundant measurements atboth macro and micro scale such as vibration frequencyresponse magnetic fields and the currentvoltage to namea few
In response to the emerging challenges aswell as opportu-nities this paper tries to review recent advancements of PHMmethodologies with a focus on data-driven approaches andtheir applications in practice and identify research problemsthat may lead to further improvement of PHM in both theoryand practice Beforewemove on to the next section wewouldlike to use an example from real practice to better illustrate theideas in PHM
A Motivating Example Bearings are found in most mechan-ical systems with rotational components They provide nec-essary support as well as constraining the moving partsto desired motion mode It is hard to overemphasize theimportance of keeping bearings under normal working con-ditions in engineering applications Breaking down of a singlebearing may cause failure of an entire system For exampleon August 30th 2010 a Qantas Boeing 747 aircraft departingfrom San Francisco International Airport encountered anaccidental engine shutdown which has later been confirmedto be caused by a fractured turbine blade and a failed bearing[16]
As a bearing tends to exhibit larger vibration as itdegrades its health condition can thus be assessed via thevibration signal collected by sensors Such signal is oftenreferred to as degradation signal in the literature of PHMWhen the amplitude of a bearingrsquos vibration exceeds certainthreshold the bearing can be considered as no longer suitablefor further operations Figure 1 demonstrates the degradationpaths of three different bearings where the119909-axis is thework-ing time of bearings (in minutes) the 119910-axis is the averageamplitude of the vibration at different harmonic frequenciesand the horizontal line is the vibration threshold consideredas indicator of bearing failures [17 18]
Unlike conventional reliability analysis which mostlyprovides population-based assessment individualized pre-diction results are possible by taking advantage of the degra-dation signal Based on the vibration data collected up to thecurrent time we can build models to predict the evolutionpath of vibration signal in the future and consequentlypredict the remaining useful life (RUL) of an in-servicebearing by assuming its failure as the vibration signal hitsthe threshold for the first time Unfortunately many factors
Mathematical Problems in Engineering 3
0 100 200 300 400 500 6000
0005
001
0015
002
0025
003
0035
Time
Deg
rada
tion
Figure 1 Evolution of vibration signals of three bearings
in the degradation make the exciting task very challengingFigure 1 demonstrates several important features of thedegradation signals For example the degradation of bearingsexhibits two distinctive phases At the initial stage the vibra-tion signals emitted are small and stable However after achange point (often a crack appears) the magnitude of vibra-tions increases dramatically and features large variabilityDespite similar shapes of degradation paths the location ofchanging point increasing rate of vibration magnitude andso forth vary from one bearing to another We will return tothis example in Section 3 for more technical details
The rest of the paper is organized as follows Section 2reviews advancements in PHM Section 3 uses three exam-ples to illustrate the procedures and strategies of PHMSection 4 concludes the paper with summing up commentsand future works that drive PHM further in academia andindustries
2 Overview of Data-Driven PHM Approaches
In general typical workflows in a PHM system can be con-ceptually illustrated as shown in Figure 2 Three major taskscan be identified in the flowchart fault diagnostics prognos-tics and condition-based maintenance The first task is todiagnose and identify the root causes of system failures Theroot causes identified can provide useful information forprognostic models as well as feedback for system designimprovement The second task takes the processed data andexisting system models or failure mode analysis as inputsand employs the developed library of prognosis algorithms toonline update degradationmodels and predict failure times ofthe system The third task makes use of the prognosis results(eg the distribution of remaining useful life) and considersthe cost versus benefits for different maintenance actions todetermine when and how the preventive maintenance will beconducted to achieve minimal operating costs and risks Allof these three tasks need to be executed dynamically and inreal time
Other than these three major tasks there are also someother important components listed in Figure 2 Neverthelessthey are often prepared offline and only timely updating maybe needed during the system operations For example signalprocessingfeature extraction is the procedure to preprocessthe signals using rules or methods developed according toengineering knowledge expert experience or statistical find-ings from historical dataThey serve the purpose to eliminatenoise reduce data dimensions (complexities) and transformthe data into proper space for future analysis Similarlyprognosis and diagnosis algorithms can also be developedoffline to cater the special characters of the signals and systemproperties Upon new arrival of sensing signals appropriatealgorithms can be selected to compute distribution of RULdetermine maintenance actions or find root causes of abnor-malities
Due to its undeniable importance recent years have seenprosperous development in different aspects of PHM Thereviews on statistical data-driven approaches by Si et al [19]and Sikorska et al [20] have covered most of the modelsused in RUL estimation with a statistical orientation butour work focuses on a wide range of the varied modelsin PHM methodologies from diagnosis to prognosis withtheir motivations The subsequent sections are devoted todiscussion of research progress and open issues of these taskscomponents in PHM to provide us with an overview forfurther advancement
21 Signal Processing and Feature Extraction In currentdata rich environment huge amounts of data are oftenautomatically collected in a short time period Different fromthe problem that very limited data was available decadesago this overwhelming data poses new challenges in datamanagement analysis and interpretation Consequentlydata preprocessing and feature extraction procedures becomestandard in many complex systems to improve data qualityreduce data redundancy and boost efficiency of analysis Dueto its importance many researchers have investigated thisproblem in the literature as summarized in some of thereview papers in different application areas (eg [21ndash23])
Instead of giving a comprehensive review on differenttechniques in the literature in this section we will list someof the commonly usedmethods in the context of PHMThesetechniques can be roughly classified as statistical methodsand engineering knowledge based methods In the firstcategory data can be transformed to optimize certain prede-termined criteria without the input of the domain knowledgeFor example principle component analysis (PCA) and inde-pendent component analysis (ICA) have been used widelyto reduce data dimensions Similar to analysis of variance(ANOVA) distance evaluation technique (DET) [24] is alsopreferred and its varied versions are applied such as a two-stage feature selection and weighting technique (TFSWT)via Euclidean distance evaluation technique (EDET) [25] amodified version of ANOVA which takes both the differencebetween the variances in each group and the maximumversus the minimum differences between the mean of eachgroup into consideration However certain useful informa-tion cannot be retained when dealing with highly nonlinear
4 Mathematical Problems in Engineering
Condition monitoring and data collection
Data preprocessingsignal processing
Feature selection
Statistical modeling
PrognosticsCondition-based
maintenanceFault
diagnostics
Figure 2 An illustration of typical flows of PHM systems
data as reported in [26] Other techniques include mutualinformation (MI) based method [27] self-organizing map(SOM) [28] and density based methods [29] These tech-niques work well on nonlinear data and hence are employedbroadly in many applications
Methods in the second category on the other handutilize some of the domain knowledge in the process offeature extractions Based on the procedure of conditional-based maintenance the data type could be summarized intothree value type (eg temperature pressure humidity etc)waveform type (eg vibration data) and multidimensionaltype (eg image data X-ray images etc) [30]
Waveform data analysis is among the most commonmethods in diagnostics of mechanical systems due to thepopularity of waveform data collected from sensors particu-larly in vibration signal analysis of rotating elements [31 32]Different kinds of techniques and algorithms are developedin this field They can be categorized into time-domainanalysis frequency-domain analysis and the combinationof both These methods often create features that have clearphysical meanings or interpretations For example Table 1summarizes ten commonly used time-domain features [25]Instead of using the raw waveform data these ten summarystatistics provide us with extracted information of the sig-nals These ten features can be generally applied to manyapplications However if the mechanism of how the abnor-malities influence the measured signal is known extractedfeatures based on domain knowledge may be more effectiveFor example Lei and Zuo [25] summarized 11 statisticalfeatures specifically developed for gear damage detectionAnother time-domain analysis approach is time synchronousaverage (TSA) popularly used in fault detection of rotatingequipment [33 34] The idea is to use the average over anumber of evolutions of raw signal in order to removereducenoise Time series models are naturally applied here as well[35] in an attempt to extract features based on parametricmodels For example coefficients in a fitted autoregressivemoving average model (ARMA) can be indicative of thehealth condition [36]
Table 1 Commonly used time-domain features
Feature DefinitionPeak value max = max
119895=1119873119899119895
Mean 119906 =
1
119873
119873
sum
119895=1
119899119895
Standard deviation 120590 = radic
1
119873 minus 1
119873
sum
119895=1
(119899119895 minus 119906)2
Root mean square RMS = radic 1
119873
119873
sum
119895=1
(119899119895)2
Skewness SK =
sum
119873
119895=1(119899119895 minus 119906)3
(119873 minus 1)120590
3
Kurtosis KU =
sum
119873
119895=1(119899119895 minus 119906)4
(119873 minus 1)120590
4
Crest indicator CI = max |119899|
radic(1119873)sum
119873
119895=1(119899119895)2
Clearance indicator CLI = max |119899|
((1119873)sum
119873
119895=1radic
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
)
2
Shape indicator SI =radic(1119873)sum
119873
119895=1(119899119895)2
(1119873)sum
119873
119895=1
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
Impulse indicator MI = max |119899|(1119873)sum
119873
119895=1
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
Meanwhile it is believed that some faults will showcertain characters in frequency domain Fourier transform isthe most common form of further signal processing whichdecomposes a timewaveform into its constituent frequenciesFast Fourier transform (FFT) is usually used to generate thefrequency spectrum from time series signals A high vibra-tion level at a particular frequency may be the signature ofa particular fault type Besides FFT spectrum other methodssuch as cepstrum [37] high-order spectra [38] and holospec-trum analysis [39] are also developed for fault diagnostics inthe frequency domain
Mathematical Problems in Engineering 5
One limitation of frequency domain analysis is its inabil-ity to handle nonstationary waveform signals commonlyobserved during machine faults A combination of both timeand frequency domains time-frequency analysis has beendeveloped to solve the problem [40 41] A typical methodis called short-time Fourier transform (STFT) [42] whichdivides the whole waveform signal into segments with short-time window and then applies Fourier transform to eachsegment Wavelet transform is another popular method witha similar idea Wavelet analysis has been successfully appliedto feature extraction and fault diagnostics in various applica-tions (eg [43ndash47]) A review on the application of waveletanalysis in machine fault diagnosis and fault feature extrac-tion can be found in Peng and Chu [48] Other methods oftime-frequency analysis include spectrogram [49] Wigner-Ville distribution [50ndash52] and Choi-Williams distribution[53]
22 Fault Diagnostics and Classification Fault diagnosticsis designed to efficiently and accurately identify the rootcause of the faults Effective diagnosis can not only reducedowntime and repair cost but also provide useful informa-tion for prognostics to improve its accuracy Fault detectionis defined to be the task of determining if a system isexperiencing problems Fault diagnostics then is the taskof locating the source of a fault once it is detected Becauseof its importance researchers from different fields haveinvestigated the issue of fault diagnostics extensively such asin manufacturing processes [54 55] discrete event systems[56 57] and communication systems and networks [58 59]We do not attempt to give a comprehensive review but focuson the approaches that are commonly used in PHMpractices
In general methodologies in fault diagnostics can be clas-sified into two categoriesmodel based approaches andmodelfree approaches In the model based category some forms ofunderlying models linking failure modes and observationsare proposed These models are often derived accordingto first principles and physical mechanisms Based on themodel structure and parameters observations can be usedto infer the root causes or the failure modes using differentalgorithms In contrast model free methods often do notassume the knowledge of underlying processes Althoughin many cases implicit or statisticalsurrogate models areused in the fault diagnostics we use the name to emphasizethat approaches in this category are purely data-drivenwithout additional assumptions on the systemsrsquo operationmechanisms
In fault diagnostics we would like to know the exact timewhen a fault appears its location and its severity Thereforethe diagnostics consists of three aspects (1) anomaly detec-tion as we first identify any potential performance deviationfrom normal operation (2) fault localization which localizesthe problem to the specific component or subsystem (3)fault classification which discriminates known and unknownfaults and identifies the type of the fault if it is previouslyknown [60] Many popular methods from machine learningand artificial intelligence are applied in this context such assupport vectormachine [61 62] 119896-nearest neighbors [25 63]and decision trees [64 65] Among them artificial neural
network has been preferred by many engineers and widelyapplied to fault diagnostics of various engineering systems[28 66ndash69] Unsupervisedmachine learning algorithms suchas fuzzy 119888-means and self-organizing maps have been appliedwhen no response is provided [70ndash72] It is worthmentioningthat the sensitivity to a given fault is often a function of oper-ating conditions and the nature of the anomaly Thereforethe environmental conditions need careful consideration Forexample self-organizing maps are used for regionalization ofthe system operating conditions [60] Excellent reference forfundamentals of these methods can be found in Bishop [73]Hastie et al [74] and Kotsiantis et al [75]
23 Data-Driven Prognostics Method As mentioned inthe introduction prognostics algorithms predict the futurereliability of a product considering current and past healthinformation collected Through constant inspection theobserved health information is often referred to as conditionmonitoring (CM) data CM data may be directly or indirectlyrelated with the system health status and hence can beviewed as system health indicators Examples of CM dataare amount of tire wear chemical concentration size of afatigue crack power output of an amplifier and the lightintensity of LED As a system degrades inevitably throughusage its health status deteriorates and is manifested throughthe observed CM data (eg the light intensity decreases asthe LED degrades) Hence CM is normally viewed as thesystem degradation signal Failures are often defined asthe degradation reaches a predetermined threshold set byexperts Thus by modeling the evolution of degradation andcalculating the time it first hits the failure threshold we willbe able to predict the system remaining useful life (RUL)Due to randomness in the evolution paths of the degradationthe calculated RUL will be in the form of some probabilitydistribution Two excellent comprehensive review papers inRUL research can be found in Si et al [19] and Sikorska et al[20] The main difference between our paper and Si et al[19] could be understood through the illustration in Figure 2Our paper describes the entire process of data-drivenapproach related to PHM addresses the three PHMobjectives (fault diagnostics prognostics and conditional-based maintenance) and discusses additional prognosticsapproaches developed from other areas and relationshipsamong different approaches On the other hand Si et al [19]focusmainly on variousmodeling approaches for prognosticsand do not address the tasks before the three PHMobjectives Sikorska et al [20] focus on evaluating the variousprognostics approaches from the industry point of viewwithout details on methodologies
As a core ingredient of PHM we summarize the majorcategories of data-driven prognostics in this section
231 Independent Increment Process Based Model Generallyspeaking the stochastic process models (Table 2) consist oftwo basic components (1) a stochastic process 119883(119905) 119905 isin
T 119883 isin 120594 with initial value 119883(0) = 1199090 where T is thetime space and 120594 is the state space of the process and (2) aboundary set 119861 where 119861 sub 120594 Taking 119883(0) = 1199090 outside theboundary set 119861 the first hitting time (FHT) is the random
6 Mathematical Problems in Engineering
Table 2 Summary of three stochastic processes
Models FHT distributions Model parameters Shapes of hazard functionsWiener process Inverse Gaussian distribution Drift 120592 and variance 1205902 Upside down bathtubGamma process Approximate inverse Gaussian or B-S distributions Shape 120572 and scale 120573 Upside down bathtubInverse Gaussian process Approximate B-S distribution Mean 120583 and shape 120582 Upside down bathtub
variable 119879 defined as 119879 = inf119905 119883(119905) isin 119861 In most cases 119861is simplified as a threshold 119909⋆ (or119863) and the FHT is the firsttime when119883(119905) reaches 119909⋆
In stochastic process model it is supposed that thedegradation signal 119883(119905) 119905 isin T 119883 isin 120594 has stationaryindependent increment which means for any time 119905 andΔ119905 gt 0 the increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) onlydepends on Δ119905 and some other parameters denoted as 120593Usually Δ119883(119905) follows a distribution that possesses theproperty of additivity For example ifΔ119883(119905) follows aNormaldistribution119873(120583Δ119905 1205902Δ119905) and119883(0) = 0 then119883(119905)will followa Normal distribution 119873(120583119905 120590
2119905) and 119883(119905) is the Wiener
process Other typical choices of the Δ119883(119905) distribution areGamma distribution and inverse Gaussian distribution inwhich cases 119883(119905) will be correspondingly called Gammaprocesses and inverse Gaussian processes
Wiener Process A Wiener process 119883(119905) 119905 ⩾ 0 can be repre-sented as119883(119905) = 120582119905+120590119861(119905)where 120582 is a drift parameter 120590 gt 0is a diffusion coefficient and 119861(119905) is the standard Brownianmotion The Probability Density Function (PDF) of the firsthitting time 119879 is the inverse Gaussian distribution IG((119909⋆ minus1199090)120582 (119909
⋆minus 1199090)2120590
2) The process varies bidirectionally over
timewithGaussian noises It only uses information containedin the current degradation status Please refer to [76ndash81] formore information Recently there are some new researchesunder this framework and use the history information givenby the entire sequence of observations These models updatethe parameters recursively so the prognostics is historydependent [82 83]
Gamma Process One disadvantage of the Wiener process isthat it is notmonotonewith the Brownianmotion embeddedFor modeling monotonically increasingdecreasing degrada-tion signals the Gamma process is a better choice Herethe increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) for a given timeinterval Δ119905 has a Gamma distribution Ga(120572Δ119905 120590) with shapeparameter 120572Δ119905 gt 0 and scale parameter 120590 gt 0 A Gammaprocess has monotonic sample paths and can be viewed asthe limit of a compound Poisson process whose rate goesto infinity while the jump size tends to zero in proportionThe first hitting time has an inverse Gamma distributiondefined by the identity 119875(119879 gt 119905) = 119875(119883(119905) lt 119909
lowast) Details
of modeling degradation with Gamma process are given bySingpurwalla [84] Lawless and Crowder [85] and Ye et al[86] and maintenance related issues are considered by vanNoortwijk [87]
Inverse Gaussian Process An inverse Gaussian process119883(119905) 119905 ⩾ 0 with mean function V(119905) and scale parameter120578 has the following properties The increment Δ119883(119905) has
an inverse Gaussian distribution IG(Δ119905 120578(Δ119905)2) Like theGamma process the inverse Gaussian process also has amonotone path and the failure time distribution approx-imated a Birnbaum-Saunders type distribution which hasexcellent properties for future computationThe IG process isrelatively new and has not beenwidely applied in degradationmodeling even though it is more flexible in incorporatingrandom effects and covariates It was introduced in Wangand Xu [88] to incorporate random effects The randomdrift model random volatility model random drift-volatilitymodel and incorporating covariates are thoroughly studiedby Ye and Chen [89]
232Markovian Process-BasedModels Another set ofmeth-ods are built based on the memoryless Markov processesAlthough Markov process still belongs to stochastic pro-cesses these methods are different from the previouslymentioned models in the sense that they assume a finite stateof the degradation and focus on the transition probabilityamong those states The methods in this category have thefollowing major variations
Markov Chain Model In general it is assumed that thedegradation process 119883119899 119899 ⩾ 0 evolves on a finite state spaceΦ = 0 1 119873 with 0 corresponding to the perfect healthystate and 119873 representing the failed state of the monitoredsystem The RUL at time instant 119899 can be defined as 119879 =
inf119905 119883119899+119905 = 119873 | 119883119899 = 119873The probability transitionmatrixand the number of the states can be estimated from historicaldata By dividing the health status into discrete states such asldquoGoodrdquo ldquoOKrdquo ldquoMinor defectsrdquo ldquoMaintenance requiredrdquo andldquoUnserviceablerdquo the method can provide meaningful resultsthat are easier to be understood by field engineers
Semi-Markov Processes A semi-Markov process 119883(119905) 119905 ⩾ 0extends the Markov chain model by including the randomtime that the process resides in each state Although theMarkov property is generally lost by this extension themodelremains of great practical value In a semi-Markovmodel thefirst hitting time represents the time that the process residesin the initial and subsequent states before it first enters one ofthe states that define set 119861
Hidden Markov Model (HMM) HMM consists of twostochastic processes a hidden Markov chain 119885119899 119899 ⩾ 0which is unobservable and represents the real state of thedegradation and an observable process 119884119899 119899 ⩾ 0 which isthe observed signal from monitoring Similar to Markovian-based models it is assumed that the degradation processevolves according to a Markov chain on a finite state spaceGenerally a conditional probability measure 119875(119884119899 | 119885119899 = 119894)
Mathematical Problems in Engineering 7
119894 isin Φ is used to link 119884119899 119899 ⩾ 0 and 119885119899 119899 ⩾ 0 As such theRUL at time instant 119899 can be defined as 119879 = inf119905 119885119899+119905 =119873 | 119885119899 = 119873 119884119895 0 le 119895 le 119899Themodel is preferred when onlyindirect observations are available [90]
233 Filtering-Based Models Similar as the HMM theKalman filtering model does not use the CM directly as thetrue degradation signal It assumes that the true state of thedegradation is unobservable but related with CM data TheKalman filtering model considers the unobserved condition119909119905 and the observed CM data 119910119905 such that 119909119905 = 120572119909119905minus1 + 120598119905
and 119910119905 = 120573119909119905 + 120578119905 where 120598119905 and 120578119905 are Gaussian noises and120572 and 120573 are the parameters of the state space model TheKalman filtering model takes advantage of all historical dataunlike many methods that only depend on the last CMstatus However the linear assumption and Gaussian noiseassumption limit its applications Efforts have been made toovercome these problems (eg [91 92])
234 Regression Based Model Methods in this categorymostly involve building parametric evolution path (linear ornonlinear) of CM data with random effects Most existingmethods in RUL estimation assume that products of thesame type or from the same batch have exactly the samefailure characteristics probabilistically While the populationbehavior can provide some reference they cannot accuratelyreflect the health evolution for each individual item sinceindividual products often experience different usage patternsdistinct environments or evendifferent quality due to processvariations Consequently it is crucial to adapt to the healthevolutions of each individual product rather than perceivedgroup averages for better reliability prediction In recentyears some methods have been proposed to incorporate thepopulation information with observations from individualitems to get better RUL estimation
Meeker and Escobar [93] give an example of a lineardegradation with Log-normal rate
119883 (119905) = 1205730 + 1205731119905 (1)
where 1205730 is fixed 1205731 sim LOGNOR(120583 120590) and 119863 is thepredetermined threshold thus the distribution of failure timewill be
119865 (119905 1205730 120583 120590) = 119875 (1205730 + 1205731119905 gt 119863) = 119875(1205731 gt119863 minus 1205730
119905
)
= Φnor (log (119905) minus [log (119863 minus 1205730) minus 120583]
120590
)
119905 gt 0
(2)
Lu andMeeker [94] proposed several random coefficientsmodel to describe individual health degradation by consider-ing both population trend and individual unit characteristicsthrough fixed and random effects respectively
119910119894119895 = 119891 (119905119895 120601 120579119894) + 120576119894119895 (3)
where 119910119894119895 is the degradation signal of item 119894 at time 119905119895 120601 is theparameters for the fixed effects and 120579119894 is the parameters of
randomeffects for item 119894 Based on (3) the distribution of fail-ure time defined as119879 = inf119905 119891(119905 120601 120579119894)+120598119894119895 gt 119863where119863 isthe predetermined threshold can be computed analytically ornumerically Different examples were illustrated for differentdegradation models and distributions of random effects 120579119894 inthe paper K Yang andG Yang [95] extended the idea and uti-lized both the life time data of failed devices and degradationinformation from unfailed ones to improve the model esti-mation Along this line with applications in a variety of fieldsother representative works include Yang and Jeang [96]Tseng et al [97] and Goode et al [98] Although in theseresults the individual-to-individual variation has been con-sidered using random effects the data from individual itemare only used to assess the variability among items in thepopulation and fit the random effects distribution 119866120579 Theprediction of failure time is still population-wise althoughit considers the variability within the population In certainsense the prediction interval is inflated to cover differentdegradation paths
Gebraeel and his colleagues [17 18 99] instead developeda Bayesian framework to model the degradation signals andpredict the residual life distribution Different from previousworks the residual life prediction is ldquocustomizedrdquo based onthe data from each individual For example the degradationsignal can be modeled by
119871 (119905119894) = 120579 + 120573 sdot 119905119894 + 120576 (119905119894) (4)
where 120579 and 120573 are random variables following certain dis-tribution and 120576 is measurement error (independent normalor Brownian motion) From historical data the joint distri-bution of 120579 and 120573 denoted by 119875(120579 120573) can be estimated asprior knowledge regarding the population characteristics ofdegradation For each operating new individual the vibrationsignals are collected and used to update the degradationmodel using Bayesian method
119875 120579 120573 | 119871 (1199051) 119871 (1199052) 119871 (119905119896)
prop 119875 119871 (1199051) 119871 (1199052) 119871 (119905119896) | 120579 120573 sdot 119875 (120579 120573)
(5)
where the left hand side of (5) represents the posteriordistribution of parameters of the degradationmodel (4) givenobservations up to time 119905119896 the first term on the right handside corresponds to the likelihood function of the observeddata implied by (4) with fixed 120579 and 120573 and the last term is the(estimated) prior distribution of themodel parameters withinthe population In other words the degradation model foreach individual is self-updating when new observations areavailable It is expected that the predicted failure time basedon the posterior degradation model will be more accurate
Due to its simplicity and natural integration Bayesianframework has continuously been investigated in the liter-ature to provide more accurate degradation modeling andfailure prognostics For example Xu and Zhou [100] studiedthemodeling and prognostics using general nonlinear degra-dation paths where the Bayesian basedmodel estimation andMonte Carlo based failure time prediction were presentedChen and Tsui [101] extended this to a two-phase modelwhich allows for a change point of the linear degradation
8 Mathematical Problems in Engineering
Thismodel captures the deterioration of the bearing indicatedby the vibration signal Other references on this topic areGebraeel and Lawley [102] and Si et al [82 83]
235 Proportional Hazard Model Proportional hazardmodel [103] has been extensively studied in various areasProportional hazard model with time-dependent variable(s)is able to incorporate both event data and CM data whichcan be particularly useful in cases of uncertain failurethresholds or hard failures [104ndash106]Themodel assumes thefollowing form for hazard rate
ℎ (119905) = ℎ0 (119905) exp (120574z (119905)) (6)where ℎ0(119905) is the baseline hazard rate 120574 is a vector of coef-ficients and z(119905) contains time-dependent variables ℎ0(119905)can be either parametric (eg Weibull) or nonparametricand model parameters can be estimated by the maximumlikelihood method In this model the condition monitoringdata are viewed as time-dependent covariates in z(119905) Systemfailure distribution can be calculated based on (6)
236 Threshold Regression Model The parent process 119883(119905)and boundary set 119861 of the FHT model will both generallyhave parameters 119911 that depend on covariates that vary acrossindividuals 119892120579(119911119894) = 119911119894120573 [107] Cox Proportional Hazardregression is for most purposes a special case of Thresh-old Regression [108] Any family of proportional hazardfunctions can be generated by varying the time scales orboundaries of a TR model subject to only mild regulatoryconditions There is a connection between the shape of thehazard function (HF) and the type of failure mode (cause offailure) For example an increasingHF corresponds to agingwear-out and a decreasing hazard function generally suggestsa mixture of defective or other weak units leading to infantmortality
24 Condition BasedMaintenance Maintenance is defined asa set of activities or tasks used to restore an item to a state inwhich it can perform its designated functions Maintenancestrategies can be broadly classified into Corrective Main-tenance and Preventive Maintenance strategies [109 110]In corrective maintenance maintenance activities are onlycarried out after the failure happens and hence should only beused for noncritical systems On the other hand preventivemaintenance tries to prevent the failure from happening byusing either predetermined maintenance such as time-basedmaintenance or condition-based maintenance (CBM) Anexample of predetermined maintenance is the commonlysuggested practice of changing engine oil every 3000miles orthreemonths (whichever comes first) regardless of the actualoil condition In recent decades some companies such as GMhave developed oil life monitoring systems which allows carowners to change oil only when necessary (eg [111]) Suchsystem is an excellent example of CBM implementation Inrecent years CBM has become the most modern techniquediscussed in the literature and falls well within the frameworkof PHM
CBM is a maintenance program that makes maintenancedecisions based on the information collected about the
underlying system allowing maintenance activities to beperformed only when necessary The dominating objectiveof CBM in literature is to minimize the cost for maintenanceactivities It is worth pointing out that in some literature theterm ldquocondition based maintenancerdquo has a broader definitionthat also involves the preceding steps of data manipulationdiagnosis and prognosis (eg [30]) In this section werestrict our discussion to maintenance decision-making inCBM
The underpinning assumption of the PHM frameworkis that systems are subject to stochastic deteriorations Thenatural choice of maintenance strategy for stochastic deterio-rating systems is called ldquocontrol-limit policyrdquo or ldquofailure limitpolicyrdquo [110 112] wheremaintenance activities are conductedwhen the system deterioration reaches a certain level Undersuch policy prognostic results on system deterioration canbe used for maintenance decision-making The control-limitpolicy has been shown to be the optimal replacement rulefor systems with increasing deteriorations when consideringthe average long-run cost per unit time [113] Existing workon CBM can be classified in several ways depending on thenature of the system and the assumptions they make whichare (1) whether the system health condition is completelyobservable or partially observable (2) whether the conditionmonitoring is continuous or intermittent (3) whether themaintenance program deals with single component or mul-tiple components Note that these are not mutually exclusiveand a single work usually falls into multiple categories Belowwe discuss these topics in more detail
In condition monitoring the system health conditioncan be either completely or partially observedidentifiedThesystem health information obtained in the former case iscalled direct information while that in the latter case is calledindirect information While it is a critical issue for the degra-dation modeling and prognosis previously reviewed in thispaper it has no major impact on the maintenance decision-making For this reason we do not discuss this issue againhere interested readers are referred to Jardine et al [30]which summarized many works in this regard
Depending on the budget constraint andor technologiesused condition monitoring can be either continuous orintermittent (periodic or aperiodic) of which the latter isalso known as interval inspection The case of CBM withintermittent condition monitoring has been studied exten-sively in literature primarily due to its wide implementationin practice The important decision variables are the controllimitcritical level and inspection interval optimal criticallevel and inspection intervals are found based on criteriathat are mostly cost-based [114ndash117] In some works criticallevels are assumed to be predetermined by expert knowledgeand only optimal inspection strategies are studied [118ndash120]To provide more refined maintenance policies to minimizecost some researchers consider multiple control limits Forexample Castanier et al [121] used different thresholds forinspection scheduling partial repair preventive replacementand restarting for repairable systems With the developmentof sensing and information technology continuous conditionmonitoring has become available at reasonable costs inmany applications [122] Comparingwith interval inspection
Mathematical Problems in Engineering 9
Siglab analyzer
Gearbox system
Accelerometers
Laptop
(a)
Timing belt
Speed controller
Motor
Tested gear
Gearbox
Shaft 1
Shaft 2
Shaft 3
Brake controller
Brake
1
2 3
4
(b)
Figure 3 Experiment setup
Figure 4 Different crack levels in the gears
the research in this area is relatively new but has becomeincreasingly popular The fundamental difference of CBMwith continuous monitoring is that the real-time systeminformation allows maintenance decisions to be made at anytime and hence the greater chance to optimize the set criteria[123ndash128]
While majority of the existing work deals only with singlecomponent some researchers extend CBM to maintenancedecision-making for multiple components in the systemTherationale of developing multicomponent maintenance policyis that there are economic dependencies among multiplecomponents [129 130] High fixed maintenance cost suchas sending a maintenance team to a remote wind farmcan bemitigated by replacingrepairingmultiple componentssimultaneously [123 126 131 132]
3 Illustrative Case Studies
In this section we use three examples to illustrate theimplementation of PHM
31 Fault Diagnosis on Gear Crack Development Gearboxesare one of the most commonly used parts in machinery
Diagnosis of gear faults is crucial for preventing system mal-function In this example we demonstrate the fault diagnosisand classification for identifying different development stagesof cracks on gears in gearboxes [25 133] A gearbox test rigis shown in Figure 3 where gear 3 is the tested gear withpotential cracks Three different types of gears are tested (1)0 crack level (2) 25 crack level (3) 50 crack level asshown in Figure 4 The vibration signal is measured usingaccelerometers under various working conditions 3 levels ofload from the magnetic brake (no load half the maximumload and maximum load) and 4 levels of motor speed(1200 rpm 1400 rpm 1600 rpm and 1800 rpm) Three sets ofdata sample are obtained under each combination of the twofactors Hence we obtain 36 data samples for each crack levelThe data are then used for gear crack detection and crack levelclassification
All the ten time-domain features listed in Table 1 arecalculated as potential candidate features Six features peakmean root mean square (RMS) skewness kurtosis andshape factor are selected by ANOVA and TFSWT Afterfeature selection three methods are applied to classifyingthe three levels of gear cracks namely multinomial logitmodel (MLM) cumulative link model (CLM) and weighted
10 Mathematical Problems in Engineering
119896 nearest neighbor (WKNN) Interested readers are referredto Lei and Zuo [25] andHai et al [133] for technical details Toassess the performance of themethods a leave-one-out cross-validation approach is used the classification accuracies forMLM CLM and WKNN are 981 944 and near 100respectively The test results demonstrate that the proposedmethods can accurately identify the crack development ofgears which is very beneficial for early warning of potentialgearbox malfunction
32 Predicting RUL of Rotational Bearings In this section wereturn to the motivating example in Section 1 which aims topredict the RULof bearings As the purpose of PHM ismainlyto provide individualized prediction results it is necessary toadapt the model to specific characteristics of each bearingrevealed through past observations A natural choice is to useBayesian framework to integrate the prior information fromother bearings with observations of the in-service unit Byselecting the conjugate prior distributions model updatingcan be efficiently done
119875 (120573 | 1198841 1198842 119884119899) prop 119875 (1198841 1198842 119884119899 | 120573) sdot 120587 (120573) (7)
where 120573 is the model parameters 119884119894 is the observed vibrationmagnitude at time 119905119894 119875(1198841 1198842 119884119899 | 120573) is the likelihoodfunction given the parameter 120587(120573) is the prior distributioncarrying information from historical bearing samples and119875(120573 | 1198841 1198842 119884119899) is the posterior distribution of 120573 inte-grating the prior information and current observations Asnew observations are collected model updating can be donerepeatedly and correspondingly the predicted failure timewill also be updated
119875 (119884119896 | 1198841 1198842 119884119899)
= int119875 (120573 | 1198841 1198842 119884119899) sdot 119875 (119884119896 | 120573) 119889120573
(8)
where 119875(119884119896 | 1198841 1198842 119884119899) is the prediction of the vibrationmagnitude at some future time 119905119896 As 119899 increases the predic-tion will be more and more accurate with smaller varianceas demonstrated in Figure 5
In this example 25 bearings are tested and Figure 6 showsthe prediction interval of the failure time The 119909-axis is theindex of the bearings used in the experiments The circleswith the same 119909-axis value represent the 005 05 and 095quantiles of the failure time and the cross shows the truefailure timeThe results show that the prediction based on theabove algorithm is acceptably accurate In certain cases theprediction interval is very tight providing very informativewarnings on the potential failures
33 Predicting RUL of Lithium-Ion Batteries Using ParticleFilter Lithium-ion batteries are widely used in consumerelectronics as their sole power sources The importance ofbatteries to those devices is arguably critical As battery agesits capacity degrades and is widely used as an indicator of thebatteryrsquos health As a common rule a battery is consideredincapable of functioning as intended when its capacity dropsto 80 of its initial value In this example a particle filtering
0 100 200 300 400 5000
0005
001
0015
002
0025
003
0035
Residual life
Prob
abili
ty d
istrib
utio
n
70 failure time80 failure time
Figure 5 Predicted distribution of residual life at different observa-tion times
0 5 10 15 20 250
200
400
600
800
1000
1200
1400
1600
Bearing index
Failu
re ti
me
Figure 6 Prediction interval and the true values of failure timefor each bearing (triangle means last observed life time of bearingswhich have not yet failed)
(PF) based prognostic algorithm is used to predict RUL oflithium-ion batteries based on accelerating testing data of sixbatteries [134]
In the experiment batteries were tested with full chargingand discharging cycles under the constant-currentconstant-voltage mode The discharge rate was set to 1C which meantthe battery would be fully discharged in one hourThe experi-ment was conducted under room temperature and dischargecapacity was calculated based on integrating current overtime for each cycle Figure 7 shows the capacity degradationprocess of one testing battery
As capacity is used as the default health indicator ofbatteries there is no feature selection needed We proceed
Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Department of Defense Mil-Hdbk-217 and Telcordia SR-332(formerly [9])) which assumed that constant hazard rate ofeach component can be tailored by independent ldquomodifiersrdquoto account for various quality operating and environmentalconditions PHM methodologies instead monitor the healthstate in real time and dynamically update the reliabilityfunction (hazard rates) based on in situ measurements andtailored evolution models obtained from historical data Dueto the success of existing PHM methodologies there is noneed to exhibit the growing interests of studying new PHMtechniques and applying PHM to underdeveloped domains
Nevertheless the increasingly complex modern systemspose new challenges on PHM One of the most prominentproblems is called No Fault Found (NFF) problem (relatedterminologies include ldquocannot duplicaterdquo ldquore-test OKrdquo ldquotrou-ble not identifiedrdquo and ldquointermittent malfunctionsrdquo) [10ndash12]particularly in electronic-rich systems As the name sug-gests it refers to the situation that no failurefault can bedetectedreplicated during laboratory tests even when thefailure has been reported in the field [13] NFF issues not onlymake the prognosis and diagnosis extremely difficult butalso can cause skyrocketing maintenance cost As reportedby Williams et al [13] NFF failures account for more than85 of all filed failures and 90 of overall maintenance costsin avionics it is estimated that NFF related activities cost theUS Department of Defense 2sim10 billion US dollars per year[14] Evidently NFF contributes a lot in operational cost inmany different application areas On top of the maintenancecosts potential safety hazards related to NFFs are even morestriking For example both Toyota and National HighwayTraffic Safety Administration (NHTSA) spent quite a longtime to investigate the root causes of sudden accelerationfailures in some car models a problem that might be linkedto 89 deaths in 71 crashes since 2000 according to NHTSA[15] Unfortunately no conclusive finding has been reacheddespite the efforts in trying to repeat the failures in a varietyof laboratory conditions These intermittent faults are alsosuspected to be the main reason for other catastrophes likeWashington Metro crashes and Brazil blackouts
Intermittent faults or NFF problems pose significant bar-riers to apply traditional methods for reliability predictionwhich are often empirical and population based From theaforementioned examples we can find that intermittent faultsare often tightly related to the environmental conditions andoperation histories of the particular individual system Theycan hardly be repeated due to unknown randomdisturbancesinvolved Therefore laboratory testing and assessment canonly provide a reference on the ldquoaveragerdquo characteristics ofthe whole population and are insufficient to provide accuratemodeling and prediction for each individual To reduce themaintenance cost and eliminate safety hazards caused byNFFthe paradigm of PHM needs to shift from empirical to datasupported and from population based to individual based
Companioned with the challenges the fast developmentof information and sensing technology has enabled thecollection of many in situ measurements during operationsand provided the capability of real time datamanagement andprocessing for each individual These advancements provideus great opportunity to develop sophisticated models with
increasing accuracy of prognostics for individual items Forinstance many different types of data during the whole lifecycle of the products can be easily retrieved especially in crit-ical applications These data could include production pro-cess information quality records operation logs and sensormeasurements Moreover unlike manually entered data usedbefore which are slow costly and error-prone most ofcurrent records are automatic accurate and timely entriesdue to the advancements of technologyThe use of Radio Fre-quency Identification (RFID) technology for example is notrare in supply chain distribution network healthcare andeven military applications to provide reliable and timelytracking or surveillance of productscomponents Advancedsensor technologies also enable abundant measurements atboth macro and micro scale such as vibration frequencyresponse magnetic fields and the currentvoltage to namea few
In response to the emerging challenges aswell as opportu-nities this paper tries to review recent advancements of PHMmethodologies with a focus on data-driven approaches andtheir applications in practice and identify research problemsthat may lead to further improvement of PHM in both theoryand practice Beforewemove on to the next section wewouldlike to use an example from real practice to better illustrate theideas in PHM
A Motivating Example Bearings are found in most mechan-ical systems with rotational components They provide nec-essary support as well as constraining the moving partsto desired motion mode It is hard to overemphasize theimportance of keeping bearings under normal working con-ditions in engineering applications Breaking down of a singlebearing may cause failure of an entire system For exampleon August 30th 2010 a Qantas Boeing 747 aircraft departingfrom San Francisco International Airport encountered anaccidental engine shutdown which has later been confirmedto be caused by a fractured turbine blade and a failed bearing[16]
As a bearing tends to exhibit larger vibration as itdegrades its health condition can thus be assessed via thevibration signal collected by sensors Such signal is oftenreferred to as degradation signal in the literature of PHMWhen the amplitude of a bearingrsquos vibration exceeds certainthreshold the bearing can be considered as no longer suitablefor further operations Figure 1 demonstrates the degradationpaths of three different bearings where the119909-axis is thework-ing time of bearings (in minutes) the 119910-axis is the averageamplitude of the vibration at different harmonic frequenciesand the horizontal line is the vibration threshold consideredas indicator of bearing failures [17 18]
Unlike conventional reliability analysis which mostlyprovides population-based assessment individualized pre-diction results are possible by taking advantage of the degra-dation signal Based on the vibration data collected up to thecurrent time we can build models to predict the evolutionpath of vibration signal in the future and consequentlypredict the remaining useful life (RUL) of an in-servicebearing by assuming its failure as the vibration signal hitsthe threshold for the first time Unfortunately many factors
Mathematical Problems in Engineering 3
0 100 200 300 400 500 6000
0005
001
0015
002
0025
003
0035
Time
Deg
rada
tion
Figure 1 Evolution of vibration signals of three bearings
in the degradation make the exciting task very challengingFigure 1 demonstrates several important features of thedegradation signals For example the degradation of bearingsexhibits two distinctive phases At the initial stage the vibra-tion signals emitted are small and stable However after achange point (often a crack appears) the magnitude of vibra-tions increases dramatically and features large variabilityDespite similar shapes of degradation paths the location ofchanging point increasing rate of vibration magnitude andso forth vary from one bearing to another We will return tothis example in Section 3 for more technical details
The rest of the paper is organized as follows Section 2reviews advancements in PHM Section 3 uses three exam-ples to illustrate the procedures and strategies of PHMSection 4 concludes the paper with summing up commentsand future works that drive PHM further in academia andindustries
2 Overview of Data-Driven PHM Approaches
In general typical workflows in a PHM system can be con-ceptually illustrated as shown in Figure 2 Three major taskscan be identified in the flowchart fault diagnostics prognos-tics and condition-based maintenance The first task is todiagnose and identify the root causes of system failures Theroot causes identified can provide useful information forprognostic models as well as feedback for system designimprovement The second task takes the processed data andexisting system models or failure mode analysis as inputsand employs the developed library of prognosis algorithms toonline update degradationmodels and predict failure times ofthe system The third task makes use of the prognosis results(eg the distribution of remaining useful life) and considersthe cost versus benefits for different maintenance actions todetermine when and how the preventive maintenance will beconducted to achieve minimal operating costs and risks Allof these three tasks need to be executed dynamically and inreal time
Other than these three major tasks there are also someother important components listed in Figure 2 Neverthelessthey are often prepared offline and only timely updating maybe needed during the system operations For example signalprocessingfeature extraction is the procedure to preprocessthe signals using rules or methods developed according toengineering knowledge expert experience or statistical find-ings from historical dataThey serve the purpose to eliminatenoise reduce data dimensions (complexities) and transformthe data into proper space for future analysis Similarlyprognosis and diagnosis algorithms can also be developedoffline to cater the special characters of the signals and systemproperties Upon new arrival of sensing signals appropriatealgorithms can be selected to compute distribution of RULdetermine maintenance actions or find root causes of abnor-malities
Due to its undeniable importance recent years have seenprosperous development in different aspects of PHM Thereviews on statistical data-driven approaches by Si et al [19]and Sikorska et al [20] have covered most of the modelsused in RUL estimation with a statistical orientation butour work focuses on a wide range of the varied modelsin PHM methodologies from diagnosis to prognosis withtheir motivations The subsequent sections are devoted todiscussion of research progress and open issues of these taskscomponents in PHM to provide us with an overview forfurther advancement
21 Signal Processing and Feature Extraction In currentdata rich environment huge amounts of data are oftenautomatically collected in a short time period Different fromthe problem that very limited data was available decadesago this overwhelming data poses new challenges in datamanagement analysis and interpretation Consequentlydata preprocessing and feature extraction procedures becomestandard in many complex systems to improve data qualityreduce data redundancy and boost efficiency of analysis Dueto its importance many researchers have investigated thisproblem in the literature as summarized in some of thereview papers in different application areas (eg [21ndash23])
Instead of giving a comprehensive review on differenttechniques in the literature in this section we will list someof the commonly usedmethods in the context of PHMThesetechniques can be roughly classified as statistical methodsand engineering knowledge based methods In the firstcategory data can be transformed to optimize certain prede-termined criteria without the input of the domain knowledgeFor example principle component analysis (PCA) and inde-pendent component analysis (ICA) have been used widelyto reduce data dimensions Similar to analysis of variance(ANOVA) distance evaluation technique (DET) [24] is alsopreferred and its varied versions are applied such as a two-stage feature selection and weighting technique (TFSWT)via Euclidean distance evaluation technique (EDET) [25] amodified version of ANOVA which takes both the differencebetween the variances in each group and the maximumversus the minimum differences between the mean of eachgroup into consideration However certain useful informa-tion cannot be retained when dealing with highly nonlinear
4 Mathematical Problems in Engineering
Condition monitoring and data collection
Data preprocessingsignal processing
Feature selection
Statistical modeling
PrognosticsCondition-based
maintenanceFault
diagnostics
Figure 2 An illustration of typical flows of PHM systems
data as reported in [26] Other techniques include mutualinformation (MI) based method [27] self-organizing map(SOM) [28] and density based methods [29] These tech-niques work well on nonlinear data and hence are employedbroadly in many applications
Methods in the second category on the other handutilize some of the domain knowledge in the process offeature extractions Based on the procedure of conditional-based maintenance the data type could be summarized intothree value type (eg temperature pressure humidity etc)waveform type (eg vibration data) and multidimensionaltype (eg image data X-ray images etc) [30]
Waveform data analysis is among the most commonmethods in diagnostics of mechanical systems due to thepopularity of waveform data collected from sensors particu-larly in vibration signal analysis of rotating elements [31 32]Different kinds of techniques and algorithms are developedin this field They can be categorized into time-domainanalysis frequency-domain analysis and the combinationof both These methods often create features that have clearphysical meanings or interpretations For example Table 1summarizes ten commonly used time-domain features [25]Instead of using the raw waveform data these ten summarystatistics provide us with extracted information of the sig-nals These ten features can be generally applied to manyapplications However if the mechanism of how the abnor-malities influence the measured signal is known extractedfeatures based on domain knowledge may be more effectiveFor example Lei and Zuo [25] summarized 11 statisticalfeatures specifically developed for gear damage detectionAnother time-domain analysis approach is time synchronousaverage (TSA) popularly used in fault detection of rotatingequipment [33 34] The idea is to use the average over anumber of evolutions of raw signal in order to removereducenoise Time series models are naturally applied here as well[35] in an attempt to extract features based on parametricmodels For example coefficients in a fitted autoregressivemoving average model (ARMA) can be indicative of thehealth condition [36]
Table 1 Commonly used time-domain features
Feature DefinitionPeak value max = max
119895=1119873119899119895
Mean 119906 =
1
119873
119873
sum
119895=1
119899119895
Standard deviation 120590 = radic
1
119873 minus 1
119873
sum
119895=1
(119899119895 minus 119906)2
Root mean square RMS = radic 1
119873
119873
sum
119895=1
(119899119895)2
Skewness SK =
sum
119873
119895=1(119899119895 minus 119906)3
(119873 minus 1)120590
3
Kurtosis KU =
sum
119873
119895=1(119899119895 minus 119906)4
(119873 minus 1)120590
4
Crest indicator CI = max |119899|
radic(1119873)sum
119873
119895=1(119899119895)2
Clearance indicator CLI = max |119899|
((1119873)sum
119873
119895=1radic
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
)
2
Shape indicator SI =radic(1119873)sum
119873
119895=1(119899119895)2
(1119873)sum
119873
119895=1
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
Impulse indicator MI = max |119899|(1119873)sum
119873
119895=1
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
Meanwhile it is believed that some faults will showcertain characters in frequency domain Fourier transform isthe most common form of further signal processing whichdecomposes a timewaveform into its constituent frequenciesFast Fourier transform (FFT) is usually used to generate thefrequency spectrum from time series signals A high vibra-tion level at a particular frequency may be the signature ofa particular fault type Besides FFT spectrum other methodssuch as cepstrum [37] high-order spectra [38] and holospec-trum analysis [39] are also developed for fault diagnostics inthe frequency domain
Mathematical Problems in Engineering 5
One limitation of frequency domain analysis is its inabil-ity to handle nonstationary waveform signals commonlyobserved during machine faults A combination of both timeand frequency domains time-frequency analysis has beendeveloped to solve the problem [40 41] A typical methodis called short-time Fourier transform (STFT) [42] whichdivides the whole waveform signal into segments with short-time window and then applies Fourier transform to eachsegment Wavelet transform is another popular method witha similar idea Wavelet analysis has been successfully appliedto feature extraction and fault diagnostics in various applica-tions (eg [43ndash47]) A review on the application of waveletanalysis in machine fault diagnosis and fault feature extrac-tion can be found in Peng and Chu [48] Other methods oftime-frequency analysis include spectrogram [49] Wigner-Ville distribution [50ndash52] and Choi-Williams distribution[53]
22 Fault Diagnostics and Classification Fault diagnosticsis designed to efficiently and accurately identify the rootcause of the faults Effective diagnosis can not only reducedowntime and repair cost but also provide useful informa-tion for prognostics to improve its accuracy Fault detectionis defined to be the task of determining if a system isexperiencing problems Fault diagnostics then is the taskof locating the source of a fault once it is detected Becauseof its importance researchers from different fields haveinvestigated the issue of fault diagnostics extensively such asin manufacturing processes [54 55] discrete event systems[56 57] and communication systems and networks [58 59]We do not attempt to give a comprehensive review but focuson the approaches that are commonly used in PHMpractices
In general methodologies in fault diagnostics can be clas-sified into two categoriesmodel based approaches andmodelfree approaches In the model based category some forms ofunderlying models linking failure modes and observationsare proposed These models are often derived accordingto first principles and physical mechanisms Based on themodel structure and parameters observations can be usedto infer the root causes or the failure modes using differentalgorithms In contrast model free methods often do notassume the knowledge of underlying processes Althoughin many cases implicit or statisticalsurrogate models areused in the fault diagnostics we use the name to emphasizethat approaches in this category are purely data-drivenwithout additional assumptions on the systemsrsquo operationmechanisms
In fault diagnostics we would like to know the exact timewhen a fault appears its location and its severity Thereforethe diagnostics consists of three aspects (1) anomaly detec-tion as we first identify any potential performance deviationfrom normal operation (2) fault localization which localizesthe problem to the specific component or subsystem (3)fault classification which discriminates known and unknownfaults and identifies the type of the fault if it is previouslyknown [60] Many popular methods from machine learningand artificial intelligence are applied in this context such assupport vectormachine [61 62] 119896-nearest neighbors [25 63]and decision trees [64 65] Among them artificial neural
network has been preferred by many engineers and widelyapplied to fault diagnostics of various engineering systems[28 66ndash69] Unsupervisedmachine learning algorithms suchas fuzzy 119888-means and self-organizing maps have been appliedwhen no response is provided [70ndash72] It is worthmentioningthat the sensitivity to a given fault is often a function of oper-ating conditions and the nature of the anomaly Thereforethe environmental conditions need careful consideration Forexample self-organizing maps are used for regionalization ofthe system operating conditions [60] Excellent reference forfundamentals of these methods can be found in Bishop [73]Hastie et al [74] and Kotsiantis et al [75]
23 Data-Driven Prognostics Method As mentioned inthe introduction prognostics algorithms predict the futurereliability of a product considering current and past healthinformation collected Through constant inspection theobserved health information is often referred to as conditionmonitoring (CM) data CM data may be directly or indirectlyrelated with the system health status and hence can beviewed as system health indicators Examples of CM dataare amount of tire wear chemical concentration size of afatigue crack power output of an amplifier and the lightintensity of LED As a system degrades inevitably throughusage its health status deteriorates and is manifested throughthe observed CM data (eg the light intensity decreases asthe LED degrades) Hence CM is normally viewed as thesystem degradation signal Failures are often defined asthe degradation reaches a predetermined threshold set byexperts Thus by modeling the evolution of degradation andcalculating the time it first hits the failure threshold we willbe able to predict the system remaining useful life (RUL)Due to randomness in the evolution paths of the degradationthe calculated RUL will be in the form of some probabilitydistribution Two excellent comprehensive review papers inRUL research can be found in Si et al [19] and Sikorska et al[20] The main difference between our paper and Si et al[19] could be understood through the illustration in Figure 2Our paper describes the entire process of data-drivenapproach related to PHM addresses the three PHMobjectives (fault diagnostics prognostics and conditional-based maintenance) and discusses additional prognosticsapproaches developed from other areas and relationshipsamong different approaches On the other hand Si et al [19]focusmainly on variousmodeling approaches for prognosticsand do not address the tasks before the three PHMobjectives Sikorska et al [20] focus on evaluating the variousprognostics approaches from the industry point of viewwithout details on methodologies
As a core ingredient of PHM we summarize the majorcategories of data-driven prognostics in this section
231 Independent Increment Process Based Model Generallyspeaking the stochastic process models (Table 2) consist oftwo basic components (1) a stochastic process 119883(119905) 119905 isin
T 119883 isin 120594 with initial value 119883(0) = 1199090 where T is thetime space and 120594 is the state space of the process and (2) aboundary set 119861 where 119861 sub 120594 Taking 119883(0) = 1199090 outside theboundary set 119861 the first hitting time (FHT) is the random
6 Mathematical Problems in Engineering
Table 2 Summary of three stochastic processes
Models FHT distributions Model parameters Shapes of hazard functionsWiener process Inverse Gaussian distribution Drift 120592 and variance 1205902 Upside down bathtubGamma process Approximate inverse Gaussian or B-S distributions Shape 120572 and scale 120573 Upside down bathtubInverse Gaussian process Approximate B-S distribution Mean 120583 and shape 120582 Upside down bathtub
variable 119879 defined as 119879 = inf119905 119883(119905) isin 119861 In most cases 119861is simplified as a threshold 119909⋆ (or119863) and the FHT is the firsttime when119883(119905) reaches 119909⋆
In stochastic process model it is supposed that thedegradation signal 119883(119905) 119905 isin T 119883 isin 120594 has stationaryindependent increment which means for any time 119905 andΔ119905 gt 0 the increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) onlydepends on Δ119905 and some other parameters denoted as 120593Usually Δ119883(119905) follows a distribution that possesses theproperty of additivity For example ifΔ119883(119905) follows aNormaldistribution119873(120583Δ119905 1205902Δ119905) and119883(0) = 0 then119883(119905)will followa Normal distribution 119873(120583119905 120590
2119905) and 119883(119905) is the Wiener
process Other typical choices of the Δ119883(119905) distribution areGamma distribution and inverse Gaussian distribution inwhich cases 119883(119905) will be correspondingly called Gammaprocesses and inverse Gaussian processes
Wiener Process A Wiener process 119883(119905) 119905 ⩾ 0 can be repre-sented as119883(119905) = 120582119905+120590119861(119905)where 120582 is a drift parameter 120590 gt 0is a diffusion coefficient and 119861(119905) is the standard Brownianmotion The Probability Density Function (PDF) of the firsthitting time 119879 is the inverse Gaussian distribution IG((119909⋆ minus1199090)120582 (119909
⋆minus 1199090)2120590
2) The process varies bidirectionally over
timewithGaussian noises It only uses information containedin the current degradation status Please refer to [76ndash81] formore information Recently there are some new researchesunder this framework and use the history information givenby the entire sequence of observations These models updatethe parameters recursively so the prognostics is historydependent [82 83]
Gamma Process One disadvantage of the Wiener process isthat it is notmonotonewith the Brownianmotion embeddedFor modeling monotonically increasingdecreasing degrada-tion signals the Gamma process is a better choice Herethe increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) for a given timeinterval Δ119905 has a Gamma distribution Ga(120572Δ119905 120590) with shapeparameter 120572Δ119905 gt 0 and scale parameter 120590 gt 0 A Gammaprocess has monotonic sample paths and can be viewed asthe limit of a compound Poisson process whose rate goesto infinity while the jump size tends to zero in proportionThe first hitting time has an inverse Gamma distributiondefined by the identity 119875(119879 gt 119905) = 119875(119883(119905) lt 119909
lowast) Details
of modeling degradation with Gamma process are given bySingpurwalla [84] Lawless and Crowder [85] and Ye et al[86] and maintenance related issues are considered by vanNoortwijk [87]
Inverse Gaussian Process An inverse Gaussian process119883(119905) 119905 ⩾ 0 with mean function V(119905) and scale parameter120578 has the following properties The increment Δ119883(119905) has
an inverse Gaussian distribution IG(Δ119905 120578(Δ119905)2) Like theGamma process the inverse Gaussian process also has amonotone path and the failure time distribution approx-imated a Birnbaum-Saunders type distribution which hasexcellent properties for future computationThe IG process isrelatively new and has not beenwidely applied in degradationmodeling even though it is more flexible in incorporatingrandom effects and covariates It was introduced in Wangand Xu [88] to incorporate random effects The randomdrift model random volatility model random drift-volatilitymodel and incorporating covariates are thoroughly studiedby Ye and Chen [89]
232Markovian Process-BasedModels Another set ofmeth-ods are built based on the memoryless Markov processesAlthough Markov process still belongs to stochastic pro-cesses these methods are different from the previouslymentioned models in the sense that they assume a finite stateof the degradation and focus on the transition probabilityamong those states The methods in this category have thefollowing major variations
Markov Chain Model In general it is assumed that thedegradation process 119883119899 119899 ⩾ 0 evolves on a finite state spaceΦ = 0 1 119873 with 0 corresponding to the perfect healthystate and 119873 representing the failed state of the monitoredsystem The RUL at time instant 119899 can be defined as 119879 =
inf119905 119883119899+119905 = 119873 | 119883119899 = 119873The probability transitionmatrixand the number of the states can be estimated from historicaldata By dividing the health status into discrete states such asldquoGoodrdquo ldquoOKrdquo ldquoMinor defectsrdquo ldquoMaintenance requiredrdquo andldquoUnserviceablerdquo the method can provide meaningful resultsthat are easier to be understood by field engineers
Semi-Markov Processes A semi-Markov process 119883(119905) 119905 ⩾ 0extends the Markov chain model by including the randomtime that the process resides in each state Although theMarkov property is generally lost by this extension themodelremains of great practical value In a semi-Markovmodel thefirst hitting time represents the time that the process residesin the initial and subsequent states before it first enters one ofthe states that define set 119861
Hidden Markov Model (HMM) HMM consists of twostochastic processes a hidden Markov chain 119885119899 119899 ⩾ 0which is unobservable and represents the real state of thedegradation and an observable process 119884119899 119899 ⩾ 0 which isthe observed signal from monitoring Similar to Markovian-based models it is assumed that the degradation processevolves according to a Markov chain on a finite state spaceGenerally a conditional probability measure 119875(119884119899 | 119885119899 = 119894)
Mathematical Problems in Engineering 7
119894 isin Φ is used to link 119884119899 119899 ⩾ 0 and 119885119899 119899 ⩾ 0 As such theRUL at time instant 119899 can be defined as 119879 = inf119905 119885119899+119905 =119873 | 119885119899 = 119873 119884119895 0 le 119895 le 119899Themodel is preferred when onlyindirect observations are available [90]
233 Filtering-Based Models Similar as the HMM theKalman filtering model does not use the CM directly as thetrue degradation signal It assumes that the true state of thedegradation is unobservable but related with CM data TheKalman filtering model considers the unobserved condition119909119905 and the observed CM data 119910119905 such that 119909119905 = 120572119909119905minus1 + 120598119905
and 119910119905 = 120573119909119905 + 120578119905 where 120598119905 and 120578119905 are Gaussian noises and120572 and 120573 are the parameters of the state space model TheKalman filtering model takes advantage of all historical dataunlike many methods that only depend on the last CMstatus However the linear assumption and Gaussian noiseassumption limit its applications Efforts have been made toovercome these problems (eg [91 92])
234 Regression Based Model Methods in this categorymostly involve building parametric evolution path (linear ornonlinear) of CM data with random effects Most existingmethods in RUL estimation assume that products of thesame type or from the same batch have exactly the samefailure characteristics probabilistically While the populationbehavior can provide some reference they cannot accuratelyreflect the health evolution for each individual item sinceindividual products often experience different usage patternsdistinct environments or evendifferent quality due to processvariations Consequently it is crucial to adapt to the healthevolutions of each individual product rather than perceivedgroup averages for better reliability prediction In recentyears some methods have been proposed to incorporate thepopulation information with observations from individualitems to get better RUL estimation
Meeker and Escobar [93] give an example of a lineardegradation with Log-normal rate
119883 (119905) = 1205730 + 1205731119905 (1)
where 1205730 is fixed 1205731 sim LOGNOR(120583 120590) and 119863 is thepredetermined threshold thus the distribution of failure timewill be
119865 (119905 1205730 120583 120590) = 119875 (1205730 + 1205731119905 gt 119863) = 119875(1205731 gt119863 minus 1205730
119905
)
= Φnor (log (119905) minus [log (119863 minus 1205730) minus 120583]
120590
)
119905 gt 0
(2)
Lu andMeeker [94] proposed several random coefficientsmodel to describe individual health degradation by consider-ing both population trend and individual unit characteristicsthrough fixed and random effects respectively
119910119894119895 = 119891 (119905119895 120601 120579119894) + 120576119894119895 (3)
where 119910119894119895 is the degradation signal of item 119894 at time 119905119895 120601 is theparameters for the fixed effects and 120579119894 is the parameters of
randomeffects for item 119894 Based on (3) the distribution of fail-ure time defined as119879 = inf119905 119891(119905 120601 120579119894)+120598119894119895 gt 119863where119863 isthe predetermined threshold can be computed analytically ornumerically Different examples were illustrated for differentdegradation models and distributions of random effects 120579119894 inthe paper K Yang andG Yang [95] extended the idea and uti-lized both the life time data of failed devices and degradationinformation from unfailed ones to improve the model esti-mation Along this line with applications in a variety of fieldsother representative works include Yang and Jeang [96]Tseng et al [97] and Goode et al [98] Although in theseresults the individual-to-individual variation has been con-sidered using random effects the data from individual itemare only used to assess the variability among items in thepopulation and fit the random effects distribution 119866120579 Theprediction of failure time is still population-wise althoughit considers the variability within the population In certainsense the prediction interval is inflated to cover differentdegradation paths
Gebraeel and his colleagues [17 18 99] instead developeda Bayesian framework to model the degradation signals andpredict the residual life distribution Different from previousworks the residual life prediction is ldquocustomizedrdquo based onthe data from each individual For example the degradationsignal can be modeled by
119871 (119905119894) = 120579 + 120573 sdot 119905119894 + 120576 (119905119894) (4)
where 120579 and 120573 are random variables following certain dis-tribution and 120576 is measurement error (independent normalor Brownian motion) From historical data the joint distri-bution of 120579 and 120573 denoted by 119875(120579 120573) can be estimated asprior knowledge regarding the population characteristics ofdegradation For each operating new individual the vibrationsignals are collected and used to update the degradationmodel using Bayesian method
119875 120579 120573 | 119871 (1199051) 119871 (1199052) 119871 (119905119896)
prop 119875 119871 (1199051) 119871 (1199052) 119871 (119905119896) | 120579 120573 sdot 119875 (120579 120573)
(5)
where the left hand side of (5) represents the posteriordistribution of parameters of the degradationmodel (4) givenobservations up to time 119905119896 the first term on the right handside corresponds to the likelihood function of the observeddata implied by (4) with fixed 120579 and 120573 and the last term is the(estimated) prior distribution of themodel parameters withinthe population In other words the degradation model foreach individual is self-updating when new observations areavailable It is expected that the predicted failure time basedon the posterior degradation model will be more accurate
Due to its simplicity and natural integration Bayesianframework has continuously been investigated in the liter-ature to provide more accurate degradation modeling andfailure prognostics For example Xu and Zhou [100] studiedthemodeling and prognostics using general nonlinear degra-dation paths where the Bayesian basedmodel estimation andMonte Carlo based failure time prediction were presentedChen and Tsui [101] extended this to a two-phase modelwhich allows for a change point of the linear degradation
8 Mathematical Problems in Engineering
Thismodel captures the deterioration of the bearing indicatedby the vibration signal Other references on this topic areGebraeel and Lawley [102] and Si et al [82 83]
235 Proportional Hazard Model Proportional hazardmodel [103] has been extensively studied in various areasProportional hazard model with time-dependent variable(s)is able to incorporate both event data and CM data whichcan be particularly useful in cases of uncertain failurethresholds or hard failures [104ndash106]Themodel assumes thefollowing form for hazard rate
ℎ (119905) = ℎ0 (119905) exp (120574z (119905)) (6)where ℎ0(119905) is the baseline hazard rate 120574 is a vector of coef-ficients and z(119905) contains time-dependent variables ℎ0(119905)can be either parametric (eg Weibull) or nonparametricand model parameters can be estimated by the maximumlikelihood method In this model the condition monitoringdata are viewed as time-dependent covariates in z(119905) Systemfailure distribution can be calculated based on (6)
236 Threshold Regression Model The parent process 119883(119905)and boundary set 119861 of the FHT model will both generallyhave parameters 119911 that depend on covariates that vary acrossindividuals 119892120579(119911119894) = 119911119894120573 [107] Cox Proportional Hazardregression is for most purposes a special case of Thresh-old Regression [108] Any family of proportional hazardfunctions can be generated by varying the time scales orboundaries of a TR model subject to only mild regulatoryconditions There is a connection between the shape of thehazard function (HF) and the type of failure mode (cause offailure) For example an increasingHF corresponds to agingwear-out and a decreasing hazard function generally suggestsa mixture of defective or other weak units leading to infantmortality
24 Condition BasedMaintenance Maintenance is defined asa set of activities or tasks used to restore an item to a state inwhich it can perform its designated functions Maintenancestrategies can be broadly classified into Corrective Main-tenance and Preventive Maintenance strategies [109 110]In corrective maintenance maintenance activities are onlycarried out after the failure happens and hence should only beused for noncritical systems On the other hand preventivemaintenance tries to prevent the failure from happening byusing either predetermined maintenance such as time-basedmaintenance or condition-based maintenance (CBM) Anexample of predetermined maintenance is the commonlysuggested practice of changing engine oil every 3000miles orthreemonths (whichever comes first) regardless of the actualoil condition In recent decades some companies such as GMhave developed oil life monitoring systems which allows carowners to change oil only when necessary (eg [111]) Suchsystem is an excellent example of CBM implementation Inrecent years CBM has become the most modern techniquediscussed in the literature and falls well within the frameworkof PHM
CBM is a maintenance program that makes maintenancedecisions based on the information collected about the
underlying system allowing maintenance activities to beperformed only when necessary The dominating objectiveof CBM in literature is to minimize the cost for maintenanceactivities It is worth pointing out that in some literature theterm ldquocondition based maintenancerdquo has a broader definitionthat also involves the preceding steps of data manipulationdiagnosis and prognosis (eg [30]) In this section werestrict our discussion to maintenance decision-making inCBM
The underpinning assumption of the PHM frameworkis that systems are subject to stochastic deteriorations Thenatural choice of maintenance strategy for stochastic deterio-rating systems is called ldquocontrol-limit policyrdquo or ldquofailure limitpolicyrdquo [110 112] wheremaintenance activities are conductedwhen the system deterioration reaches a certain level Undersuch policy prognostic results on system deterioration canbe used for maintenance decision-making The control-limitpolicy has been shown to be the optimal replacement rulefor systems with increasing deteriorations when consideringthe average long-run cost per unit time [113] Existing workon CBM can be classified in several ways depending on thenature of the system and the assumptions they make whichare (1) whether the system health condition is completelyobservable or partially observable (2) whether the conditionmonitoring is continuous or intermittent (3) whether themaintenance program deals with single component or mul-tiple components Note that these are not mutually exclusiveand a single work usually falls into multiple categories Belowwe discuss these topics in more detail
In condition monitoring the system health conditioncan be either completely or partially observedidentifiedThesystem health information obtained in the former case iscalled direct information while that in the latter case is calledindirect information While it is a critical issue for the degra-dation modeling and prognosis previously reviewed in thispaper it has no major impact on the maintenance decision-making For this reason we do not discuss this issue againhere interested readers are referred to Jardine et al [30]which summarized many works in this regard
Depending on the budget constraint andor technologiesused condition monitoring can be either continuous orintermittent (periodic or aperiodic) of which the latter isalso known as interval inspection The case of CBM withintermittent condition monitoring has been studied exten-sively in literature primarily due to its wide implementationin practice The important decision variables are the controllimitcritical level and inspection interval optimal criticallevel and inspection intervals are found based on criteriathat are mostly cost-based [114ndash117] In some works criticallevels are assumed to be predetermined by expert knowledgeand only optimal inspection strategies are studied [118ndash120]To provide more refined maintenance policies to minimizecost some researchers consider multiple control limits Forexample Castanier et al [121] used different thresholds forinspection scheduling partial repair preventive replacementand restarting for repairable systems With the developmentof sensing and information technology continuous conditionmonitoring has become available at reasonable costs inmany applications [122] Comparingwith interval inspection
Mathematical Problems in Engineering 9
Siglab analyzer
Gearbox system
Accelerometers
Laptop
(a)
Timing belt
Speed controller
Motor
Tested gear
Gearbox
Shaft 1
Shaft 2
Shaft 3
Brake controller
Brake
1
2 3
4
(b)
Figure 3 Experiment setup
Figure 4 Different crack levels in the gears
the research in this area is relatively new but has becomeincreasingly popular The fundamental difference of CBMwith continuous monitoring is that the real-time systeminformation allows maintenance decisions to be made at anytime and hence the greater chance to optimize the set criteria[123ndash128]
While majority of the existing work deals only with singlecomponent some researchers extend CBM to maintenancedecision-making for multiple components in the systemTherationale of developing multicomponent maintenance policyis that there are economic dependencies among multiplecomponents [129 130] High fixed maintenance cost suchas sending a maintenance team to a remote wind farmcan bemitigated by replacingrepairingmultiple componentssimultaneously [123 126 131 132]
3 Illustrative Case Studies
In this section we use three examples to illustrate theimplementation of PHM
31 Fault Diagnosis on Gear Crack Development Gearboxesare one of the most commonly used parts in machinery
Diagnosis of gear faults is crucial for preventing system mal-function In this example we demonstrate the fault diagnosisand classification for identifying different development stagesof cracks on gears in gearboxes [25 133] A gearbox test rigis shown in Figure 3 where gear 3 is the tested gear withpotential cracks Three different types of gears are tested (1)0 crack level (2) 25 crack level (3) 50 crack level asshown in Figure 4 The vibration signal is measured usingaccelerometers under various working conditions 3 levels ofload from the magnetic brake (no load half the maximumload and maximum load) and 4 levels of motor speed(1200 rpm 1400 rpm 1600 rpm and 1800 rpm) Three sets ofdata sample are obtained under each combination of the twofactors Hence we obtain 36 data samples for each crack levelThe data are then used for gear crack detection and crack levelclassification
All the ten time-domain features listed in Table 1 arecalculated as potential candidate features Six features peakmean root mean square (RMS) skewness kurtosis andshape factor are selected by ANOVA and TFSWT Afterfeature selection three methods are applied to classifyingthe three levels of gear cracks namely multinomial logitmodel (MLM) cumulative link model (CLM) and weighted
10 Mathematical Problems in Engineering
119896 nearest neighbor (WKNN) Interested readers are referredto Lei and Zuo [25] andHai et al [133] for technical details Toassess the performance of themethods a leave-one-out cross-validation approach is used the classification accuracies forMLM CLM and WKNN are 981 944 and near 100respectively The test results demonstrate that the proposedmethods can accurately identify the crack development ofgears which is very beneficial for early warning of potentialgearbox malfunction
32 Predicting RUL of Rotational Bearings In this section wereturn to the motivating example in Section 1 which aims topredict the RULof bearings As the purpose of PHM ismainlyto provide individualized prediction results it is necessary toadapt the model to specific characteristics of each bearingrevealed through past observations A natural choice is to useBayesian framework to integrate the prior information fromother bearings with observations of the in-service unit Byselecting the conjugate prior distributions model updatingcan be efficiently done
119875 (120573 | 1198841 1198842 119884119899) prop 119875 (1198841 1198842 119884119899 | 120573) sdot 120587 (120573) (7)
where 120573 is the model parameters 119884119894 is the observed vibrationmagnitude at time 119905119894 119875(1198841 1198842 119884119899 | 120573) is the likelihoodfunction given the parameter 120587(120573) is the prior distributioncarrying information from historical bearing samples and119875(120573 | 1198841 1198842 119884119899) is the posterior distribution of 120573 inte-grating the prior information and current observations Asnew observations are collected model updating can be donerepeatedly and correspondingly the predicted failure timewill also be updated
119875 (119884119896 | 1198841 1198842 119884119899)
= int119875 (120573 | 1198841 1198842 119884119899) sdot 119875 (119884119896 | 120573) 119889120573
(8)
where 119875(119884119896 | 1198841 1198842 119884119899) is the prediction of the vibrationmagnitude at some future time 119905119896 As 119899 increases the predic-tion will be more and more accurate with smaller varianceas demonstrated in Figure 5
In this example 25 bearings are tested and Figure 6 showsthe prediction interval of the failure time The 119909-axis is theindex of the bearings used in the experiments The circleswith the same 119909-axis value represent the 005 05 and 095quantiles of the failure time and the cross shows the truefailure timeThe results show that the prediction based on theabove algorithm is acceptably accurate In certain cases theprediction interval is very tight providing very informativewarnings on the potential failures
33 Predicting RUL of Lithium-Ion Batteries Using ParticleFilter Lithium-ion batteries are widely used in consumerelectronics as their sole power sources The importance ofbatteries to those devices is arguably critical As battery agesits capacity degrades and is widely used as an indicator of thebatteryrsquos health As a common rule a battery is consideredincapable of functioning as intended when its capacity dropsto 80 of its initial value In this example a particle filtering
0 100 200 300 400 5000
0005
001
0015
002
0025
003
0035
Residual life
Prob
abili
ty d
istrib
utio
n
70 failure time80 failure time
Figure 5 Predicted distribution of residual life at different observa-tion times
0 5 10 15 20 250
200
400
600
800
1000
1200
1400
1600
Bearing index
Failu
re ti
me
Figure 6 Prediction interval and the true values of failure timefor each bearing (triangle means last observed life time of bearingswhich have not yet failed)
(PF) based prognostic algorithm is used to predict RUL oflithium-ion batteries based on accelerating testing data of sixbatteries [134]
In the experiment batteries were tested with full chargingand discharging cycles under the constant-currentconstant-voltage mode The discharge rate was set to 1C which meantthe battery would be fully discharged in one hourThe experi-ment was conducted under room temperature and dischargecapacity was calculated based on integrating current overtime for each cycle Figure 7 shows the capacity degradationprocess of one testing battery
As capacity is used as the default health indicator ofbatteries there is no feature selection needed We proceed
Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
0 100 200 300 400 500 6000
0005
001
0015
002
0025
003
0035
Time
Deg
rada
tion
Figure 1 Evolution of vibration signals of three bearings
in the degradation make the exciting task very challengingFigure 1 demonstrates several important features of thedegradation signals For example the degradation of bearingsexhibits two distinctive phases At the initial stage the vibra-tion signals emitted are small and stable However after achange point (often a crack appears) the magnitude of vibra-tions increases dramatically and features large variabilityDespite similar shapes of degradation paths the location ofchanging point increasing rate of vibration magnitude andso forth vary from one bearing to another We will return tothis example in Section 3 for more technical details
The rest of the paper is organized as follows Section 2reviews advancements in PHM Section 3 uses three exam-ples to illustrate the procedures and strategies of PHMSection 4 concludes the paper with summing up commentsand future works that drive PHM further in academia andindustries
2 Overview of Data-Driven PHM Approaches
In general typical workflows in a PHM system can be con-ceptually illustrated as shown in Figure 2 Three major taskscan be identified in the flowchart fault diagnostics prognos-tics and condition-based maintenance The first task is todiagnose and identify the root causes of system failures Theroot causes identified can provide useful information forprognostic models as well as feedback for system designimprovement The second task takes the processed data andexisting system models or failure mode analysis as inputsand employs the developed library of prognosis algorithms toonline update degradationmodels and predict failure times ofthe system The third task makes use of the prognosis results(eg the distribution of remaining useful life) and considersthe cost versus benefits for different maintenance actions todetermine when and how the preventive maintenance will beconducted to achieve minimal operating costs and risks Allof these three tasks need to be executed dynamically and inreal time
Other than these three major tasks there are also someother important components listed in Figure 2 Neverthelessthey are often prepared offline and only timely updating maybe needed during the system operations For example signalprocessingfeature extraction is the procedure to preprocessthe signals using rules or methods developed according toengineering knowledge expert experience or statistical find-ings from historical dataThey serve the purpose to eliminatenoise reduce data dimensions (complexities) and transformthe data into proper space for future analysis Similarlyprognosis and diagnosis algorithms can also be developedoffline to cater the special characters of the signals and systemproperties Upon new arrival of sensing signals appropriatealgorithms can be selected to compute distribution of RULdetermine maintenance actions or find root causes of abnor-malities
Due to its undeniable importance recent years have seenprosperous development in different aspects of PHM Thereviews on statistical data-driven approaches by Si et al [19]and Sikorska et al [20] have covered most of the modelsused in RUL estimation with a statistical orientation butour work focuses on a wide range of the varied modelsin PHM methodologies from diagnosis to prognosis withtheir motivations The subsequent sections are devoted todiscussion of research progress and open issues of these taskscomponents in PHM to provide us with an overview forfurther advancement
21 Signal Processing and Feature Extraction In currentdata rich environment huge amounts of data are oftenautomatically collected in a short time period Different fromthe problem that very limited data was available decadesago this overwhelming data poses new challenges in datamanagement analysis and interpretation Consequentlydata preprocessing and feature extraction procedures becomestandard in many complex systems to improve data qualityreduce data redundancy and boost efficiency of analysis Dueto its importance many researchers have investigated thisproblem in the literature as summarized in some of thereview papers in different application areas (eg [21ndash23])
Instead of giving a comprehensive review on differenttechniques in the literature in this section we will list someof the commonly usedmethods in the context of PHMThesetechniques can be roughly classified as statistical methodsand engineering knowledge based methods In the firstcategory data can be transformed to optimize certain prede-termined criteria without the input of the domain knowledgeFor example principle component analysis (PCA) and inde-pendent component analysis (ICA) have been used widelyto reduce data dimensions Similar to analysis of variance(ANOVA) distance evaluation technique (DET) [24] is alsopreferred and its varied versions are applied such as a two-stage feature selection and weighting technique (TFSWT)via Euclidean distance evaluation technique (EDET) [25] amodified version of ANOVA which takes both the differencebetween the variances in each group and the maximumversus the minimum differences between the mean of eachgroup into consideration However certain useful informa-tion cannot be retained when dealing with highly nonlinear
4 Mathematical Problems in Engineering
Condition monitoring and data collection
Data preprocessingsignal processing
Feature selection
Statistical modeling
PrognosticsCondition-based
maintenanceFault
diagnostics
Figure 2 An illustration of typical flows of PHM systems
data as reported in [26] Other techniques include mutualinformation (MI) based method [27] self-organizing map(SOM) [28] and density based methods [29] These tech-niques work well on nonlinear data and hence are employedbroadly in many applications
Methods in the second category on the other handutilize some of the domain knowledge in the process offeature extractions Based on the procedure of conditional-based maintenance the data type could be summarized intothree value type (eg temperature pressure humidity etc)waveform type (eg vibration data) and multidimensionaltype (eg image data X-ray images etc) [30]
Waveform data analysis is among the most commonmethods in diagnostics of mechanical systems due to thepopularity of waveform data collected from sensors particu-larly in vibration signal analysis of rotating elements [31 32]Different kinds of techniques and algorithms are developedin this field They can be categorized into time-domainanalysis frequency-domain analysis and the combinationof both These methods often create features that have clearphysical meanings or interpretations For example Table 1summarizes ten commonly used time-domain features [25]Instead of using the raw waveform data these ten summarystatistics provide us with extracted information of the sig-nals These ten features can be generally applied to manyapplications However if the mechanism of how the abnor-malities influence the measured signal is known extractedfeatures based on domain knowledge may be more effectiveFor example Lei and Zuo [25] summarized 11 statisticalfeatures specifically developed for gear damage detectionAnother time-domain analysis approach is time synchronousaverage (TSA) popularly used in fault detection of rotatingequipment [33 34] The idea is to use the average over anumber of evolutions of raw signal in order to removereducenoise Time series models are naturally applied here as well[35] in an attempt to extract features based on parametricmodels For example coefficients in a fitted autoregressivemoving average model (ARMA) can be indicative of thehealth condition [36]
Table 1 Commonly used time-domain features
Feature DefinitionPeak value max = max
119895=1119873119899119895
Mean 119906 =
1
119873
119873
sum
119895=1
119899119895
Standard deviation 120590 = radic
1
119873 minus 1
119873
sum
119895=1
(119899119895 minus 119906)2
Root mean square RMS = radic 1
119873
119873
sum
119895=1
(119899119895)2
Skewness SK =
sum
119873
119895=1(119899119895 minus 119906)3
(119873 minus 1)120590
3
Kurtosis KU =
sum
119873
119895=1(119899119895 minus 119906)4
(119873 minus 1)120590
4
Crest indicator CI = max |119899|
radic(1119873)sum
119873
119895=1(119899119895)2
Clearance indicator CLI = max |119899|
((1119873)sum
119873
119895=1radic
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
)
2
Shape indicator SI =radic(1119873)sum
119873
119895=1(119899119895)2
(1119873)sum
119873
119895=1
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
Impulse indicator MI = max |119899|(1119873)sum
119873
119895=1
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
Meanwhile it is believed that some faults will showcertain characters in frequency domain Fourier transform isthe most common form of further signal processing whichdecomposes a timewaveform into its constituent frequenciesFast Fourier transform (FFT) is usually used to generate thefrequency spectrum from time series signals A high vibra-tion level at a particular frequency may be the signature ofa particular fault type Besides FFT spectrum other methodssuch as cepstrum [37] high-order spectra [38] and holospec-trum analysis [39] are also developed for fault diagnostics inthe frequency domain
Mathematical Problems in Engineering 5
One limitation of frequency domain analysis is its inabil-ity to handle nonstationary waveform signals commonlyobserved during machine faults A combination of both timeand frequency domains time-frequency analysis has beendeveloped to solve the problem [40 41] A typical methodis called short-time Fourier transform (STFT) [42] whichdivides the whole waveform signal into segments with short-time window and then applies Fourier transform to eachsegment Wavelet transform is another popular method witha similar idea Wavelet analysis has been successfully appliedto feature extraction and fault diagnostics in various applica-tions (eg [43ndash47]) A review on the application of waveletanalysis in machine fault diagnosis and fault feature extrac-tion can be found in Peng and Chu [48] Other methods oftime-frequency analysis include spectrogram [49] Wigner-Ville distribution [50ndash52] and Choi-Williams distribution[53]
22 Fault Diagnostics and Classification Fault diagnosticsis designed to efficiently and accurately identify the rootcause of the faults Effective diagnosis can not only reducedowntime and repair cost but also provide useful informa-tion for prognostics to improve its accuracy Fault detectionis defined to be the task of determining if a system isexperiencing problems Fault diagnostics then is the taskof locating the source of a fault once it is detected Becauseof its importance researchers from different fields haveinvestigated the issue of fault diagnostics extensively such asin manufacturing processes [54 55] discrete event systems[56 57] and communication systems and networks [58 59]We do not attempt to give a comprehensive review but focuson the approaches that are commonly used in PHMpractices
In general methodologies in fault diagnostics can be clas-sified into two categoriesmodel based approaches andmodelfree approaches In the model based category some forms ofunderlying models linking failure modes and observationsare proposed These models are often derived accordingto first principles and physical mechanisms Based on themodel structure and parameters observations can be usedto infer the root causes or the failure modes using differentalgorithms In contrast model free methods often do notassume the knowledge of underlying processes Althoughin many cases implicit or statisticalsurrogate models areused in the fault diagnostics we use the name to emphasizethat approaches in this category are purely data-drivenwithout additional assumptions on the systemsrsquo operationmechanisms
In fault diagnostics we would like to know the exact timewhen a fault appears its location and its severity Thereforethe diagnostics consists of three aspects (1) anomaly detec-tion as we first identify any potential performance deviationfrom normal operation (2) fault localization which localizesthe problem to the specific component or subsystem (3)fault classification which discriminates known and unknownfaults and identifies the type of the fault if it is previouslyknown [60] Many popular methods from machine learningand artificial intelligence are applied in this context such assupport vectormachine [61 62] 119896-nearest neighbors [25 63]and decision trees [64 65] Among them artificial neural
network has been preferred by many engineers and widelyapplied to fault diagnostics of various engineering systems[28 66ndash69] Unsupervisedmachine learning algorithms suchas fuzzy 119888-means and self-organizing maps have been appliedwhen no response is provided [70ndash72] It is worthmentioningthat the sensitivity to a given fault is often a function of oper-ating conditions and the nature of the anomaly Thereforethe environmental conditions need careful consideration Forexample self-organizing maps are used for regionalization ofthe system operating conditions [60] Excellent reference forfundamentals of these methods can be found in Bishop [73]Hastie et al [74] and Kotsiantis et al [75]
23 Data-Driven Prognostics Method As mentioned inthe introduction prognostics algorithms predict the futurereliability of a product considering current and past healthinformation collected Through constant inspection theobserved health information is often referred to as conditionmonitoring (CM) data CM data may be directly or indirectlyrelated with the system health status and hence can beviewed as system health indicators Examples of CM dataare amount of tire wear chemical concentration size of afatigue crack power output of an amplifier and the lightintensity of LED As a system degrades inevitably throughusage its health status deteriorates and is manifested throughthe observed CM data (eg the light intensity decreases asthe LED degrades) Hence CM is normally viewed as thesystem degradation signal Failures are often defined asthe degradation reaches a predetermined threshold set byexperts Thus by modeling the evolution of degradation andcalculating the time it first hits the failure threshold we willbe able to predict the system remaining useful life (RUL)Due to randomness in the evolution paths of the degradationthe calculated RUL will be in the form of some probabilitydistribution Two excellent comprehensive review papers inRUL research can be found in Si et al [19] and Sikorska et al[20] The main difference between our paper and Si et al[19] could be understood through the illustration in Figure 2Our paper describes the entire process of data-drivenapproach related to PHM addresses the three PHMobjectives (fault diagnostics prognostics and conditional-based maintenance) and discusses additional prognosticsapproaches developed from other areas and relationshipsamong different approaches On the other hand Si et al [19]focusmainly on variousmodeling approaches for prognosticsand do not address the tasks before the three PHMobjectives Sikorska et al [20] focus on evaluating the variousprognostics approaches from the industry point of viewwithout details on methodologies
As a core ingredient of PHM we summarize the majorcategories of data-driven prognostics in this section
231 Independent Increment Process Based Model Generallyspeaking the stochastic process models (Table 2) consist oftwo basic components (1) a stochastic process 119883(119905) 119905 isin
T 119883 isin 120594 with initial value 119883(0) = 1199090 where T is thetime space and 120594 is the state space of the process and (2) aboundary set 119861 where 119861 sub 120594 Taking 119883(0) = 1199090 outside theboundary set 119861 the first hitting time (FHT) is the random
6 Mathematical Problems in Engineering
Table 2 Summary of three stochastic processes
Models FHT distributions Model parameters Shapes of hazard functionsWiener process Inverse Gaussian distribution Drift 120592 and variance 1205902 Upside down bathtubGamma process Approximate inverse Gaussian or B-S distributions Shape 120572 and scale 120573 Upside down bathtubInverse Gaussian process Approximate B-S distribution Mean 120583 and shape 120582 Upside down bathtub
variable 119879 defined as 119879 = inf119905 119883(119905) isin 119861 In most cases 119861is simplified as a threshold 119909⋆ (or119863) and the FHT is the firsttime when119883(119905) reaches 119909⋆
In stochastic process model it is supposed that thedegradation signal 119883(119905) 119905 isin T 119883 isin 120594 has stationaryindependent increment which means for any time 119905 andΔ119905 gt 0 the increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) onlydepends on Δ119905 and some other parameters denoted as 120593Usually Δ119883(119905) follows a distribution that possesses theproperty of additivity For example ifΔ119883(119905) follows aNormaldistribution119873(120583Δ119905 1205902Δ119905) and119883(0) = 0 then119883(119905)will followa Normal distribution 119873(120583119905 120590
2119905) and 119883(119905) is the Wiener
process Other typical choices of the Δ119883(119905) distribution areGamma distribution and inverse Gaussian distribution inwhich cases 119883(119905) will be correspondingly called Gammaprocesses and inverse Gaussian processes
Wiener Process A Wiener process 119883(119905) 119905 ⩾ 0 can be repre-sented as119883(119905) = 120582119905+120590119861(119905)where 120582 is a drift parameter 120590 gt 0is a diffusion coefficient and 119861(119905) is the standard Brownianmotion The Probability Density Function (PDF) of the firsthitting time 119879 is the inverse Gaussian distribution IG((119909⋆ minus1199090)120582 (119909
⋆minus 1199090)2120590
2) The process varies bidirectionally over
timewithGaussian noises It only uses information containedin the current degradation status Please refer to [76ndash81] formore information Recently there are some new researchesunder this framework and use the history information givenby the entire sequence of observations These models updatethe parameters recursively so the prognostics is historydependent [82 83]
Gamma Process One disadvantage of the Wiener process isthat it is notmonotonewith the Brownianmotion embeddedFor modeling monotonically increasingdecreasing degrada-tion signals the Gamma process is a better choice Herethe increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) for a given timeinterval Δ119905 has a Gamma distribution Ga(120572Δ119905 120590) with shapeparameter 120572Δ119905 gt 0 and scale parameter 120590 gt 0 A Gammaprocess has monotonic sample paths and can be viewed asthe limit of a compound Poisson process whose rate goesto infinity while the jump size tends to zero in proportionThe first hitting time has an inverse Gamma distributiondefined by the identity 119875(119879 gt 119905) = 119875(119883(119905) lt 119909
lowast) Details
of modeling degradation with Gamma process are given bySingpurwalla [84] Lawless and Crowder [85] and Ye et al[86] and maintenance related issues are considered by vanNoortwijk [87]
Inverse Gaussian Process An inverse Gaussian process119883(119905) 119905 ⩾ 0 with mean function V(119905) and scale parameter120578 has the following properties The increment Δ119883(119905) has
an inverse Gaussian distribution IG(Δ119905 120578(Δ119905)2) Like theGamma process the inverse Gaussian process also has amonotone path and the failure time distribution approx-imated a Birnbaum-Saunders type distribution which hasexcellent properties for future computationThe IG process isrelatively new and has not beenwidely applied in degradationmodeling even though it is more flexible in incorporatingrandom effects and covariates It was introduced in Wangand Xu [88] to incorporate random effects The randomdrift model random volatility model random drift-volatilitymodel and incorporating covariates are thoroughly studiedby Ye and Chen [89]
232Markovian Process-BasedModels Another set ofmeth-ods are built based on the memoryless Markov processesAlthough Markov process still belongs to stochastic pro-cesses these methods are different from the previouslymentioned models in the sense that they assume a finite stateof the degradation and focus on the transition probabilityamong those states The methods in this category have thefollowing major variations
Markov Chain Model In general it is assumed that thedegradation process 119883119899 119899 ⩾ 0 evolves on a finite state spaceΦ = 0 1 119873 with 0 corresponding to the perfect healthystate and 119873 representing the failed state of the monitoredsystem The RUL at time instant 119899 can be defined as 119879 =
inf119905 119883119899+119905 = 119873 | 119883119899 = 119873The probability transitionmatrixand the number of the states can be estimated from historicaldata By dividing the health status into discrete states such asldquoGoodrdquo ldquoOKrdquo ldquoMinor defectsrdquo ldquoMaintenance requiredrdquo andldquoUnserviceablerdquo the method can provide meaningful resultsthat are easier to be understood by field engineers
Semi-Markov Processes A semi-Markov process 119883(119905) 119905 ⩾ 0extends the Markov chain model by including the randomtime that the process resides in each state Although theMarkov property is generally lost by this extension themodelremains of great practical value In a semi-Markovmodel thefirst hitting time represents the time that the process residesin the initial and subsequent states before it first enters one ofthe states that define set 119861
Hidden Markov Model (HMM) HMM consists of twostochastic processes a hidden Markov chain 119885119899 119899 ⩾ 0which is unobservable and represents the real state of thedegradation and an observable process 119884119899 119899 ⩾ 0 which isthe observed signal from monitoring Similar to Markovian-based models it is assumed that the degradation processevolves according to a Markov chain on a finite state spaceGenerally a conditional probability measure 119875(119884119899 | 119885119899 = 119894)
Mathematical Problems in Engineering 7
119894 isin Φ is used to link 119884119899 119899 ⩾ 0 and 119885119899 119899 ⩾ 0 As such theRUL at time instant 119899 can be defined as 119879 = inf119905 119885119899+119905 =119873 | 119885119899 = 119873 119884119895 0 le 119895 le 119899Themodel is preferred when onlyindirect observations are available [90]
233 Filtering-Based Models Similar as the HMM theKalman filtering model does not use the CM directly as thetrue degradation signal It assumes that the true state of thedegradation is unobservable but related with CM data TheKalman filtering model considers the unobserved condition119909119905 and the observed CM data 119910119905 such that 119909119905 = 120572119909119905minus1 + 120598119905
and 119910119905 = 120573119909119905 + 120578119905 where 120598119905 and 120578119905 are Gaussian noises and120572 and 120573 are the parameters of the state space model TheKalman filtering model takes advantage of all historical dataunlike many methods that only depend on the last CMstatus However the linear assumption and Gaussian noiseassumption limit its applications Efforts have been made toovercome these problems (eg [91 92])
234 Regression Based Model Methods in this categorymostly involve building parametric evolution path (linear ornonlinear) of CM data with random effects Most existingmethods in RUL estimation assume that products of thesame type or from the same batch have exactly the samefailure characteristics probabilistically While the populationbehavior can provide some reference they cannot accuratelyreflect the health evolution for each individual item sinceindividual products often experience different usage patternsdistinct environments or evendifferent quality due to processvariations Consequently it is crucial to adapt to the healthevolutions of each individual product rather than perceivedgroup averages for better reliability prediction In recentyears some methods have been proposed to incorporate thepopulation information with observations from individualitems to get better RUL estimation
Meeker and Escobar [93] give an example of a lineardegradation with Log-normal rate
119883 (119905) = 1205730 + 1205731119905 (1)
where 1205730 is fixed 1205731 sim LOGNOR(120583 120590) and 119863 is thepredetermined threshold thus the distribution of failure timewill be
119865 (119905 1205730 120583 120590) = 119875 (1205730 + 1205731119905 gt 119863) = 119875(1205731 gt119863 minus 1205730
119905
)
= Φnor (log (119905) minus [log (119863 minus 1205730) minus 120583]
120590
)
119905 gt 0
(2)
Lu andMeeker [94] proposed several random coefficientsmodel to describe individual health degradation by consider-ing both population trend and individual unit characteristicsthrough fixed and random effects respectively
119910119894119895 = 119891 (119905119895 120601 120579119894) + 120576119894119895 (3)
where 119910119894119895 is the degradation signal of item 119894 at time 119905119895 120601 is theparameters for the fixed effects and 120579119894 is the parameters of
randomeffects for item 119894 Based on (3) the distribution of fail-ure time defined as119879 = inf119905 119891(119905 120601 120579119894)+120598119894119895 gt 119863where119863 isthe predetermined threshold can be computed analytically ornumerically Different examples were illustrated for differentdegradation models and distributions of random effects 120579119894 inthe paper K Yang andG Yang [95] extended the idea and uti-lized both the life time data of failed devices and degradationinformation from unfailed ones to improve the model esti-mation Along this line with applications in a variety of fieldsother representative works include Yang and Jeang [96]Tseng et al [97] and Goode et al [98] Although in theseresults the individual-to-individual variation has been con-sidered using random effects the data from individual itemare only used to assess the variability among items in thepopulation and fit the random effects distribution 119866120579 Theprediction of failure time is still population-wise althoughit considers the variability within the population In certainsense the prediction interval is inflated to cover differentdegradation paths
Gebraeel and his colleagues [17 18 99] instead developeda Bayesian framework to model the degradation signals andpredict the residual life distribution Different from previousworks the residual life prediction is ldquocustomizedrdquo based onthe data from each individual For example the degradationsignal can be modeled by
119871 (119905119894) = 120579 + 120573 sdot 119905119894 + 120576 (119905119894) (4)
where 120579 and 120573 are random variables following certain dis-tribution and 120576 is measurement error (independent normalor Brownian motion) From historical data the joint distri-bution of 120579 and 120573 denoted by 119875(120579 120573) can be estimated asprior knowledge regarding the population characteristics ofdegradation For each operating new individual the vibrationsignals are collected and used to update the degradationmodel using Bayesian method
119875 120579 120573 | 119871 (1199051) 119871 (1199052) 119871 (119905119896)
prop 119875 119871 (1199051) 119871 (1199052) 119871 (119905119896) | 120579 120573 sdot 119875 (120579 120573)
(5)
where the left hand side of (5) represents the posteriordistribution of parameters of the degradationmodel (4) givenobservations up to time 119905119896 the first term on the right handside corresponds to the likelihood function of the observeddata implied by (4) with fixed 120579 and 120573 and the last term is the(estimated) prior distribution of themodel parameters withinthe population In other words the degradation model foreach individual is self-updating when new observations areavailable It is expected that the predicted failure time basedon the posterior degradation model will be more accurate
Due to its simplicity and natural integration Bayesianframework has continuously been investigated in the liter-ature to provide more accurate degradation modeling andfailure prognostics For example Xu and Zhou [100] studiedthemodeling and prognostics using general nonlinear degra-dation paths where the Bayesian basedmodel estimation andMonte Carlo based failure time prediction were presentedChen and Tsui [101] extended this to a two-phase modelwhich allows for a change point of the linear degradation
8 Mathematical Problems in Engineering
Thismodel captures the deterioration of the bearing indicatedby the vibration signal Other references on this topic areGebraeel and Lawley [102] and Si et al [82 83]
235 Proportional Hazard Model Proportional hazardmodel [103] has been extensively studied in various areasProportional hazard model with time-dependent variable(s)is able to incorporate both event data and CM data whichcan be particularly useful in cases of uncertain failurethresholds or hard failures [104ndash106]Themodel assumes thefollowing form for hazard rate
ℎ (119905) = ℎ0 (119905) exp (120574z (119905)) (6)where ℎ0(119905) is the baseline hazard rate 120574 is a vector of coef-ficients and z(119905) contains time-dependent variables ℎ0(119905)can be either parametric (eg Weibull) or nonparametricand model parameters can be estimated by the maximumlikelihood method In this model the condition monitoringdata are viewed as time-dependent covariates in z(119905) Systemfailure distribution can be calculated based on (6)
236 Threshold Regression Model The parent process 119883(119905)and boundary set 119861 of the FHT model will both generallyhave parameters 119911 that depend on covariates that vary acrossindividuals 119892120579(119911119894) = 119911119894120573 [107] Cox Proportional Hazardregression is for most purposes a special case of Thresh-old Regression [108] Any family of proportional hazardfunctions can be generated by varying the time scales orboundaries of a TR model subject to only mild regulatoryconditions There is a connection between the shape of thehazard function (HF) and the type of failure mode (cause offailure) For example an increasingHF corresponds to agingwear-out and a decreasing hazard function generally suggestsa mixture of defective or other weak units leading to infantmortality
24 Condition BasedMaintenance Maintenance is defined asa set of activities or tasks used to restore an item to a state inwhich it can perform its designated functions Maintenancestrategies can be broadly classified into Corrective Main-tenance and Preventive Maintenance strategies [109 110]In corrective maintenance maintenance activities are onlycarried out after the failure happens and hence should only beused for noncritical systems On the other hand preventivemaintenance tries to prevent the failure from happening byusing either predetermined maintenance such as time-basedmaintenance or condition-based maintenance (CBM) Anexample of predetermined maintenance is the commonlysuggested practice of changing engine oil every 3000miles orthreemonths (whichever comes first) regardless of the actualoil condition In recent decades some companies such as GMhave developed oil life monitoring systems which allows carowners to change oil only when necessary (eg [111]) Suchsystem is an excellent example of CBM implementation Inrecent years CBM has become the most modern techniquediscussed in the literature and falls well within the frameworkof PHM
CBM is a maintenance program that makes maintenancedecisions based on the information collected about the
underlying system allowing maintenance activities to beperformed only when necessary The dominating objectiveof CBM in literature is to minimize the cost for maintenanceactivities It is worth pointing out that in some literature theterm ldquocondition based maintenancerdquo has a broader definitionthat also involves the preceding steps of data manipulationdiagnosis and prognosis (eg [30]) In this section werestrict our discussion to maintenance decision-making inCBM
The underpinning assumption of the PHM frameworkis that systems are subject to stochastic deteriorations Thenatural choice of maintenance strategy for stochastic deterio-rating systems is called ldquocontrol-limit policyrdquo or ldquofailure limitpolicyrdquo [110 112] wheremaintenance activities are conductedwhen the system deterioration reaches a certain level Undersuch policy prognostic results on system deterioration canbe used for maintenance decision-making The control-limitpolicy has been shown to be the optimal replacement rulefor systems with increasing deteriorations when consideringthe average long-run cost per unit time [113] Existing workon CBM can be classified in several ways depending on thenature of the system and the assumptions they make whichare (1) whether the system health condition is completelyobservable or partially observable (2) whether the conditionmonitoring is continuous or intermittent (3) whether themaintenance program deals with single component or mul-tiple components Note that these are not mutually exclusiveand a single work usually falls into multiple categories Belowwe discuss these topics in more detail
In condition monitoring the system health conditioncan be either completely or partially observedidentifiedThesystem health information obtained in the former case iscalled direct information while that in the latter case is calledindirect information While it is a critical issue for the degra-dation modeling and prognosis previously reviewed in thispaper it has no major impact on the maintenance decision-making For this reason we do not discuss this issue againhere interested readers are referred to Jardine et al [30]which summarized many works in this regard
Depending on the budget constraint andor technologiesused condition monitoring can be either continuous orintermittent (periodic or aperiodic) of which the latter isalso known as interval inspection The case of CBM withintermittent condition monitoring has been studied exten-sively in literature primarily due to its wide implementationin practice The important decision variables are the controllimitcritical level and inspection interval optimal criticallevel and inspection intervals are found based on criteriathat are mostly cost-based [114ndash117] In some works criticallevels are assumed to be predetermined by expert knowledgeand only optimal inspection strategies are studied [118ndash120]To provide more refined maintenance policies to minimizecost some researchers consider multiple control limits Forexample Castanier et al [121] used different thresholds forinspection scheduling partial repair preventive replacementand restarting for repairable systems With the developmentof sensing and information technology continuous conditionmonitoring has become available at reasonable costs inmany applications [122] Comparingwith interval inspection
Mathematical Problems in Engineering 9
Siglab analyzer
Gearbox system
Accelerometers
Laptop
(a)
Timing belt
Speed controller
Motor
Tested gear
Gearbox
Shaft 1
Shaft 2
Shaft 3
Brake controller
Brake
1
2 3
4
(b)
Figure 3 Experiment setup
Figure 4 Different crack levels in the gears
the research in this area is relatively new but has becomeincreasingly popular The fundamental difference of CBMwith continuous monitoring is that the real-time systeminformation allows maintenance decisions to be made at anytime and hence the greater chance to optimize the set criteria[123ndash128]
While majority of the existing work deals only with singlecomponent some researchers extend CBM to maintenancedecision-making for multiple components in the systemTherationale of developing multicomponent maintenance policyis that there are economic dependencies among multiplecomponents [129 130] High fixed maintenance cost suchas sending a maintenance team to a remote wind farmcan bemitigated by replacingrepairingmultiple componentssimultaneously [123 126 131 132]
3 Illustrative Case Studies
In this section we use three examples to illustrate theimplementation of PHM
31 Fault Diagnosis on Gear Crack Development Gearboxesare one of the most commonly used parts in machinery
Diagnosis of gear faults is crucial for preventing system mal-function In this example we demonstrate the fault diagnosisand classification for identifying different development stagesof cracks on gears in gearboxes [25 133] A gearbox test rigis shown in Figure 3 where gear 3 is the tested gear withpotential cracks Three different types of gears are tested (1)0 crack level (2) 25 crack level (3) 50 crack level asshown in Figure 4 The vibration signal is measured usingaccelerometers under various working conditions 3 levels ofload from the magnetic brake (no load half the maximumload and maximum load) and 4 levels of motor speed(1200 rpm 1400 rpm 1600 rpm and 1800 rpm) Three sets ofdata sample are obtained under each combination of the twofactors Hence we obtain 36 data samples for each crack levelThe data are then used for gear crack detection and crack levelclassification
All the ten time-domain features listed in Table 1 arecalculated as potential candidate features Six features peakmean root mean square (RMS) skewness kurtosis andshape factor are selected by ANOVA and TFSWT Afterfeature selection three methods are applied to classifyingthe three levels of gear cracks namely multinomial logitmodel (MLM) cumulative link model (CLM) and weighted
10 Mathematical Problems in Engineering
119896 nearest neighbor (WKNN) Interested readers are referredto Lei and Zuo [25] andHai et al [133] for technical details Toassess the performance of themethods a leave-one-out cross-validation approach is used the classification accuracies forMLM CLM and WKNN are 981 944 and near 100respectively The test results demonstrate that the proposedmethods can accurately identify the crack development ofgears which is very beneficial for early warning of potentialgearbox malfunction
32 Predicting RUL of Rotational Bearings In this section wereturn to the motivating example in Section 1 which aims topredict the RULof bearings As the purpose of PHM ismainlyto provide individualized prediction results it is necessary toadapt the model to specific characteristics of each bearingrevealed through past observations A natural choice is to useBayesian framework to integrate the prior information fromother bearings with observations of the in-service unit Byselecting the conjugate prior distributions model updatingcan be efficiently done
119875 (120573 | 1198841 1198842 119884119899) prop 119875 (1198841 1198842 119884119899 | 120573) sdot 120587 (120573) (7)
where 120573 is the model parameters 119884119894 is the observed vibrationmagnitude at time 119905119894 119875(1198841 1198842 119884119899 | 120573) is the likelihoodfunction given the parameter 120587(120573) is the prior distributioncarrying information from historical bearing samples and119875(120573 | 1198841 1198842 119884119899) is the posterior distribution of 120573 inte-grating the prior information and current observations Asnew observations are collected model updating can be donerepeatedly and correspondingly the predicted failure timewill also be updated
119875 (119884119896 | 1198841 1198842 119884119899)
= int119875 (120573 | 1198841 1198842 119884119899) sdot 119875 (119884119896 | 120573) 119889120573
(8)
where 119875(119884119896 | 1198841 1198842 119884119899) is the prediction of the vibrationmagnitude at some future time 119905119896 As 119899 increases the predic-tion will be more and more accurate with smaller varianceas demonstrated in Figure 5
In this example 25 bearings are tested and Figure 6 showsthe prediction interval of the failure time The 119909-axis is theindex of the bearings used in the experiments The circleswith the same 119909-axis value represent the 005 05 and 095quantiles of the failure time and the cross shows the truefailure timeThe results show that the prediction based on theabove algorithm is acceptably accurate In certain cases theprediction interval is very tight providing very informativewarnings on the potential failures
33 Predicting RUL of Lithium-Ion Batteries Using ParticleFilter Lithium-ion batteries are widely used in consumerelectronics as their sole power sources The importance ofbatteries to those devices is arguably critical As battery agesits capacity degrades and is widely used as an indicator of thebatteryrsquos health As a common rule a battery is consideredincapable of functioning as intended when its capacity dropsto 80 of its initial value In this example a particle filtering
0 100 200 300 400 5000
0005
001
0015
002
0025
003
0035
Residual life
Prob
abili
ty d
istrib
utio
n
70 failure time80 failure time
Figure 5 Predicted distribution of residual life at different observa-tion times
0 5 10 15 20 250
200
400
600
800
1000
1200
1400
1600
Bearing index
Failu
re ti
me
Figure 6 Prediction interval and the true values of failure timefor each bearing (triangle means last observed life time of bearingswhich have not yet failed)
(PF) based prognostic algorithm is used to predict RUL oflithium-ion batteries based on accelerating testing data of sixbatteries [134]
In the experiment batteries were tested with full chargingand discharging cycles under the constant-currentconstant-voltage mode The discharge rate was set to 1C which meantthe battery would be fully discharged in one hourThe experi-ment was conducted under room temperature and dischargecapacity was calculated based on integrating current overtime for each cycle Figure 7 shows the capacity degradationprocess of one testing battery
As capacity is used as the default health indicator ofbatteries there is no feature selection needed We proceed
Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
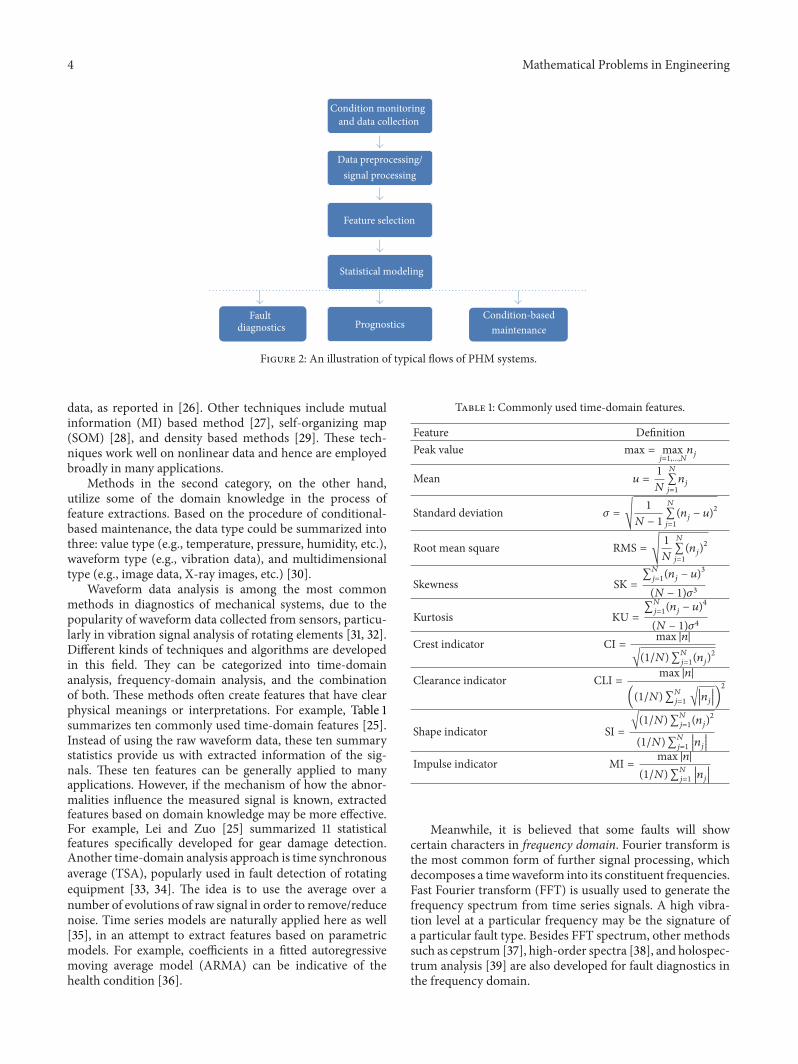
4 Mathematical Problems in Engineering
Condition monitoring and data collection
Data preprocessingsignal processing
Feature selection
Statistical modeling
PrognosticsCondition-based
maintenanceFault
diagnostics
Figure 2 An illustration of typical flows of PHM systems
data as reported in [26] Other techniques include mutualinformation (MI) based method [27] self-organizing map(SOM) [28] and density based methods [29] These tech-niques work well on nonlinear data and hence are employedbroadly in many applications
Methods in the second category on the other handutilize some of the domain knowledge in the process offeature extractions Based on the procedure of conditional-based maintenance the data type could be summarized intothree value type (eg temperature pressure humidity etc)waveform type (eg vibration data) and multidimensionaltype (eg image data X-ray images etc) [30]
Waveform data analysis is among the most commonmethods in diagnostics of mechanical systems due to thepopularity of waveform data collected from sensors particu-larly in vibration signal analysis of rotating elements [31 32]Different kinds of techniques and algorithms are developedin this field They can be categorized into time-domainanalysis frequency-domain analysis and the combinationof both These methods often create features that have clearphysical meanings or interpretations For example Table 1summarizes ten commonly used time-domain features [25]Instead of using the raw waveform data these ten summarystatistics provide us with extracted information of the sig-nals These ten features can be generally applied to manyapplications However if the mechanism of how the abnor-malities influence the measured signal is known extractedfeatures based on domain knowledge may be more effectiveFor example Lei and Zuo [25] summarized 11 statisticalfeatures specifically developed for gear damage detectionAnother time-domain analysis approach is time synchronousaverage (TSA) popularly used in fault detection of rotatingequipment [33 34] The idea is to use the average over anumber of evolutions of raw signal in order to removereducenoise Time series models are naturally applied here as well[35] in an attempt to extract features based on parametricmodels For example coefficients in a fitted autoregressivemoving average model (ARMA) can be indicative of thehealth condition [36]
Table 1 Commonly used time-domain features
Feature DefinitionPeak value max = max
119895=1119873119899119895
Mean 119906 =
1
119873
119873
sum
119895=1
119899119895
Standard deviation 120590 = radic
1
119873 minus 1
119873
sum
119895=1
(119899119895 minus 119906)2
Root mean square RMS = radic 1
119873
119873
sum
119895=1
(119899119895)2
Skewness SK =
sum
119873
119895=1(119899119895 minus 119906)3
(119873 minus 1)120590
3
Kurtosis KU =
sum
119873
119895=1(119899119895 minus 119906)4
(119873 minus 1)120590
4
Crest indicator CI = max |119899|
radic(1119873)sum
119873
119895=1(119899119895)2
Clearance indicator CLI = max |119899|
((1119873)sum
119873
119895=1radic
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
)
2
Shape indicator SI =radic(1119873)sum
119873
119895=1(119899119895)2
(1119873)sum
119873
119895=1
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
Impulse indicator MI = max |119899|(1119873)sum
119873
119895=1
1003816
1003816
1003816
1003816
1003816
119899119895
1003816
1003816
1003816
1003816
1003816
Meanwhile it is believed that some faults will showcertain characters in frequency domain Fourier transform isthe most common form of further signal processing whichdecomposes a timewaveform into its constituent frequenciesFast Fourier transform (FFT) is usually used to generate thefrequency spectrum from time series signals A high vibra-tion level at a particular frequency may be the signature ofa particular fault type Besides FFT spectrum other methodssuch as cepstrum [37] high-order spectra [38] and holospec-trum analysis [39] are also developed for fault diagnostics inthe frequency domain
Mathematical Problems in Engineering 5
One limitation of frequency domain analysis is its inabil-ity to handle nonstationary waveform signals commonlyobserved during machine faults A combination of both timeand frequency domains time-frequency analysis has beendeveloped to solve the problem [40 41] A typical methodis called short-time Fourier transform (STFT) [42] whichdivides the whole waveform signal into segments with short-time window and then applies Fourier transform to eachsegment Wavelet transform is another popular method witha similar idea Wavelet analysis has been successfully appliedto feature extraction and fault diagnostics in various applica-tions (eg [43ndash47]) A review on the application of waveletanalysis in machine fault diagnosis and fault feature extrac-tion can be found in Peng and Chu [48] Other methods oftime-frequency analysis include spectrogram [49] Wigner-Ville distribution [50ndash52] and Choi-Williams distribution[53]
22 Fault Diagnostics and Classification Fault diagnosticsis designed to efficiently and accurately identify the rootcause of the faults Effective diagnosis can not only reducedowntime and repair cost but also provide useful informa-tion for prognostics to improve its accuracy Fault detectionis defined to be the task of determining if a system isexperiencing problems Fault diagnostics then is the taskof locating the source of a fault once it is detected Becauseof its importance researchers from different fields haveinvestigated the issue of fault diagnostics extensively such asin manufacturing processes [54 55] discrete event systems[56 57] and communication systems and networks [58 59]We do not attempt to give a comprehensive review but focuson the approaches that are commonly used in PHMpractices
In general methodologies in fault diagnostics can be clas-sified into two categoriesmodel based approaches andmodelfree approaches In the model based category some forms ofunderlying models linking failure modes and observationsare proposed These models are often derived accordingto first principles and physical mechanisms Based on themodel structure and parameters observations can be usedto infer the root causes or the failure modes using differentalgorithms In contrast model free methods often do notassume the knowledge of underlying processes Althoughin many cases implicit or statisticalsurrogate models areused in the fault diagnostics we use the name to emphasizethat approaches in this category are purely data-drivenwithout additional assumptions on the systemsrsquo operationmechanisms
In fault diagnostics we would like to know the exact timewhen a fault appears its location and its severity Thereforethe diagnostics consists of three aspects (1) anomaly detec-tion as we first identify any potential performance deviationfrom normal operation (2) fault localization which localizesthe problem to the specific component or subsystem (3)fault classification which discriminates known and unknownfaults and identifies the type of the fault if it is previouslyknown [60] Many popular methods from machine learningand artificial intelligence are applied in this context such assupport vectormachine [61 62] 119896-nearest neighbors [25 63]and decision trees [64 65] Among them artificial neural
network has been preferred by many engineers and widelyapplied to fault diagnostics of various engineering systems[28 66ndash69] Unsupervisedmachine learning algorithms suchas fuzzy 119888-means and self-organizing maps have been appliedwhen no response is provided [70ndash72] It is worthmentioningthat the sensitivity to a given fault is often a function of oper-ating conditions and the nature of the anomaly Thereforethe environmental conditions need careful consideration Forexample self-organizing maps are used for regionalization ofthe system operating conditions [60] Excellent reference forfundamentals of these methods can be found in Bishop [73]Hastie et al [74] and Kotsiantis et al [75]
23 Data-Driven Prognostics Method As mentioned inthe introduction prognostics algorithms predict the futurereliability of a product considering current and past healthinformation collected Through constant inspection theobserved health information is often referred to as conditionmonitoring (CM) data CM data may be directly or indirectlyrelated with the system health status and hence can beviewed as system health indicators Examples of CM dataare amount of tire wear chemical concentration size of afatigue crack power output of an amplifier and the lightintensity of LED As a system degrades inevitably throughusage its health status deteriorates and is manifested throughthe observed CM data (eg the light intensity decreases asthe LED degrades) Hence CM is normally viewed as thesystem degradation signal Failures are often defined asthe degradation reaches a predetermined threshold set byexperts Thus by modeling the evolution of degradation andcalculating the time it first hits the failure threshold we willbe able to predict the system remaining useful life (RUL)Due to randomness in the evolution paths of the degradationthe calculated RUL will be in the form of some probabilitydistribution Two excellent comprehensive review papers inRUL research can be found in Si et al [19] and Sikorska et al[20] The main difference between our paper and Si et al[19] could be understood through the illustration in Figure 2Our paper describes the entire process of data-drivenapproach related to PHM addresses the three PHMobjectives (fault diagnostics prognostics and conditional-based maintenance) and discusses additional prognosticsapproaches developed from other areas and relationshipsamong different approaches On the other hand Si et al [19]focusmainly on variousmodeling approaches for prognosticsand do not address the tasks before the three PHMobjectives Sikorska et al [20] focus on evaluating the variousprognostics approaches from the industry point of viewwithout details on methodologies
As a core ingredient of PHM we summarize the majorcategories of data-driven prognostics in this section
231 Independent Increment Process Based Model Generallyspeaking the stochastic process models (Table 2) consist oftwo basic components (1) a stochastic process 119883(119905) 119905 isin
T 119883 isin 120594 with initial value 119883(0) = 1199090 where T is thetime space and 120594 is the state space of the process and (2) aboundary set 119861 where 119861 sub 120594 Taking 119883(0) = 1199090 outside theboundary set 119861 the first hitting time (FHT) is the random
6 Mathematical Problems in Engineering
Table 2 Summary of three stochastic processes
Models FHT distributions Model parameters Shapes of hazard functionsWiener process Inverse Gaussian distribution Drift 120592 and variance 1205902 Upside down bathtubGamma process Approximate inverse Gaussian or B-S distributions Shape 120572 and scale 120573 Upside down bathtubInverse Gaussian process Approximate B-S distribution Mean 120583 and shape 120582 Upside down bathtub
variable 119879 defined as 119879 = inf119905 119883(119905) isin 119861 In most cases 119861is simplified as a threshold 119909⋆ (or119863) and the FHT is the firsttime when119883(119905) reaches 119909⋆
In stochastic process model it is supposed that thedegradation signal 119883(119905) 119905 isin T 119883 isin 120594 has stationaryindependent increment which means for any time 119905 andΔ119905 gt 0 the increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) onlydepends on Δ119905 and some other parameters denoted as 120593Usually Δ119883(119905) follows a distribution that possesses theproperty of additivity For example ifΔ119883(119905) follows aNormaldistribution119873(120583Δ119905 1205902Δ119905) and119883(0) = 0 then119883(119905)will followa Normal distribution 119873(120583119905 120590
2119905) and 119883(119905) is the Wiener
process Other typical choices of the Δ119883(119905) distribution areGamma distribution and inverse Gaussian distribution inwhich cases 119883(119905) will be correspondingly called Gammaprocesses and inverse Gaussian processes
Wiener Process A Wiener process 119883(119905) 119905 ⩾ 0 can be repre-sented as119883(119905) = 120582119905+120590119861(119905)where 120582 is a drift parameter 120590 gt 0is a diffusion coefficient and 119861(119905) is the standard Brownianmotion The Probability Density Function (PDF) of the firsthitting time 119879 is the inverse Gaussian distribution IG((119909⋆ minus1199090)120582 (119909
⋆minus 1199090)2120590
2) The process varies bidirectionally over
timewithGaussian noises It only uses information containedin the current degradation status Please refer to [76ndash81] formore information Recently there are some new researchesunder this framework and use the history information givenby the entire sequence of observations These models updatethe parameters recursively so the prognostics is historydependent [82 83]
Gamma Process One disadvantage of the Wiener process isthat it is notmonotonewith the Brownianmotion embeddedFor modeling monotonically increasingdecreasing degrada-tion signals the Gamma process is a better choice Herethe increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) for a given timeinterval Δ119905 has a Gamma distribution Ga(120572Δ119905 120590) with shapeparameter 120572Δ119905 gt 0 and scale parameter 120590 gt 0 A Gammaprocess has monotonic sample paths and can be viewed asthe limit of a compound Poisson process whose rate goesto infinity while the jump size tends to zero in proportionThe first hitting time has an inverse Gamma distributiondefined by the identity 119875(119879 gt 119905) = 119875(119883(119905) lt 119909
lowast) Details
of modeling degradation with Gamma process are given bySingpurwalla [84] Lawless and Crowder [85] and Ye et al[86] and maintenance related issues are considered by vanNoortwijk [87]
Inverse Gaussian Process An inverse Gaussian process119883(119905) 119905 ⩾ 0 with mean function V(119905) and scale parameter120578 has the following properties The increment Δ119883(119905) has
an inverse Gaussian distribution IG(Δ119905 120578(Δ119905)2) Like theGamma process the inverse Gaussian process also has amonotone path and the failure time distribution approx-imated a Birnbaum-Saunders type distribution which hasexcellent properties for future computationThe IG process isrelatively new and has not beenwidely applied in degradationmodeling even though it is more flexible in incorporatingrandom effects and covariates It was introduced in Wangand Xu [88] to incorporate random effects The randomdrift model random volatility model random drift-volatilitymodel and incorporating covariates are thoroughly studiedby Ye and Chen [89]
232Markovian Process-BasedModels Another set ofmeth-ods are built based on the memoryless Markov processesAlthough Markov process still belongs to stochastic pro-cesses these methods are different from the previouslymentioned models in the sense that they assume a finite stateof the degradation and focus on the transition probabilityamong those states The methods in this category have thefollowing major variations
Markov Chain Model In general it is assumed that thedegradation process 119883119899 119899 ⩾ 0 evolves on a finite state spaceΦ = 0 1 119873 with 0 corresponding to the perfect healthystate and 119873 representing the failed state of the monitoredsystem The RUL at time instant 119899 can be defined as 119879 =
inf119905 119883119899+119905 = 119873 | 119883119899 = 119873The probability transitionmatrixand the number of the states can be estimated from historicaldata By dividing the health status into discrete states such asldquoGoodrdquo ldquoOKrdquo ldquoMinor defectsrdquo ldquoMaintenance requiredrdquo andldquoUnserviceablerdquo the method can provide meaningful resultsthat are easier to be understood by field engineers
Semi-Markov Processes A semi-Markov process 119883(119905) 119905 ⩾ 0extends the Markov chain model by including the randomtime that the process resides in each state Although theMarkov property is generally lost by this extension themodelremains of great practical value In a semi-Markovmodel thefirst hitting time represents the time that the process residesin the initial and subsequent states before it first enters one ofthe states that define set 119861
Hidden Markov Model (HMM) HMM consists of twostochastic processes a hidden Markov chain 119885119899 119899 ⩾ 0which is unobservable and represents the real state of thedegradation and an observable process 119884119899 119899 ⩾ 0 which isthe observed signal from monitoring Similar to Markovian-based models it is assumed that the degradation processevolves according to a Markov chain on a finite state spaceGenerally a conditional probability measure 119875(119884119899 | 119885119899 = 119894)
Mathematical Problems in Engineering 7
119894 isin Φ is used to link 119884119899 119899 ⩾ 0 and 119885119899 119899 ⩾ 0 As such theRUL at time instant 119899 can be defined as 119879 = inf119905 119885119899+119905 =119873 | 119885119899 = 119873 119884119895 0 le 119895 le 119899Themodel is preferred when onlyindirect observations are available [90]
233 Filtering-Based Models Similar as the HMM theKalman filtering model does not use the CM directly as thetrue degradation signal It assumes that the true state of thedegradation is unobservable but related with CM data TheKalman filtering model considers the unobserved condition119909119905 and the observed CM data 119910119905 such that 119909119905 = 120572119909119905minus1 + 120598119905
and 119910119905 = 120573119909119905 + 120578119905 where 120598119905 and 120578119905 are Gaussian noises and120572 and 120573 are the parameters of the state space model TheKalman filtering model takes advantage of all historical dataunlike many methods that only depend on the last CMstatus However the linear assumption and Gaussian noiseassumption limit its applications Efforts have been made toovercome these problems (eg [91 92])
234 Regression Based Model Methods in this categorymostly involve building parametric evolution path (linear ornonlinear) of CM data with random effects Most existingmethods in RUL estimation assume that products of thesame type or from the same batch have exactly the samefailure characteristics probabilistically While the populationbehavior can provide some reference they cannot accuratelyreflect the health evolution for each individual item sinceindividual products often experience different usage patternsdistinct environments or evendifferent quality due to processvariations Consequently it is crucial to adapt to the healthevolutions of each individual product rather than perceivedgroup averages for better reliability prediction In recentyears some methods have been proposed to incorporate thepopulation information with observations from individualitems to get better RUL estimation
Meeker and Escobar [93] give an example of a lineardegradation with Log-normal rate
119883 (119905) = 1205730 + 1205731119905 (1)
where 1205730 is fixed 1205731 sim LOGNOR(120583 120590) and 119863 is thepredetermined threshold thus the distribution of failure timewill be
119865 (119905 1205730 120583 120590) = 119875 (1205730 + 1205731119905 gt 119863) = 119875(1205731 gt119863 minus 1205730
119905
)
= Φnor (log (119905) minus [log (119863 minus 1205730) minus 120583]
120590
)
119905 gt 0
(2)
Lu andMeeker [94] proposed several random coefficientsmodel to describe individual health degradation by consider-ing both population trend and individual unit characteristicsthrough fixed and random effects respectively
119910119894119895 = 119891 (119905119895 120601 120579119894) + 120576119894119895 (3)
where 119910119894119895 is the degradation signal of item 119894 at time 119905119895 120601 is theparameters for the fixed effects and 120579119894 is the parameters of
randomeffects for item 119894 Based on (3) the distribution of fail-ure time defined as119879 = inf119905 119891(119905 120601 120579119894)+120598119894119895 gt 119863where119863 isthe predetermined threshold can be computed analytically ornumerically Different examples were illustrated for differentdegradation models and distributions of random effects 120579119894 inthe paper K Yang andG Yang [95] extended the idea and uti-lized both the life time data of failed devices and degradationinformation from unfailed ones to improve the model esti-mation Along this line with applications in a variety of fieldsother representative works include Yang and Jeang [96]Tseng et al [97] and Goode et al [98] Although in theseresults the individual-to-individual variation has been con-sidered using random effects the data from individual itemare only used to assess the variability among items in thepopulation and fit the random effects distribution 119866120579 Theprediction of failure time is still population-wise althoughit considers the variability within the population In certainsense the prediction interval is inflated to cover differentdegradation paths
Gebraeel and his colleagues [17 18 99] instead developeda Bayesian framework to model the degradation signals andpredict the residual life distribution Different from previousworks the residual life prediction is ldquocustomizedrdquo based onthe data from each individual For example the degradationsignal can be modeled by
119871 (119905119894) = 120579 + 120573 sdot 119905119894 + 120576 (119905119894) (4)
where 120579 and 120573 are random variables following certain dis-tribution and 120576 is measurement error (independent normalor Brownian motion) From historical data the joint distri-bution of 120579 and 120573 denoted by 119875(120579 120573) can be estimated asprior knowledge regarding the population characteristics ofdegradation For each operating new individual the vibrationsignals are collected and used to update the degradationmodel using Bayesian method
119875 120579 120573 | 119871 (1199051) 119871 (1199052) 119871 (119905119896)
prop 119875 119871 (1199051) 119871 (1199052) 119871 (119905119896) | 120579 120573 sdot 119875 (120579 120573)
(5)
where the left hand side of (5) represents the posteriordistribution of parameters of the degradationmodel (4) givenobservations up to time 119905119896 the first term on the right handside corresponds to the likelihood function of the observeddata implied by (4) with fixed 120579 and 120573 and the last term is the(estimated) prior distribution of themodel parameters withinthe population In other words the degradation model foreach individual is self-updating when new observations areavailable It is expected that the predicted failure time basedon the posterior degradation model will be more accurate
Due to its simplicity and natural integration Bayesianframework has continuously been investigated in the liter-ature to provide more accurate degradation modeling andfailure prognostics For example Xu and Zhou [100] studiedthemodeling and prognostics using general nonlinear degra-dation paths where the Bayesian basedmodel estimation andMonte Carlo based failure time prediction were presentedChen and Tsui [101] extended this to a two-phase modelwhich allows for a change point of the linear degradation
8 Mathematical Problems in Engineering
Thismodel captures the deterioration of the bearing indicatedby the vibration signal Other references on this topic areGebraeel and Lawley [102] and Si et al [82 83]
235 Proportional Hazard Model Proportional hazardmodel [103] has been extensively studied in various areasProportional hazard model with time-dependent variable(s)is able to incorporate both event data and CM data whichcan be particularly useful in cases of uncertain failurethresholds or hard failures [104ndash106]Themodel assumes thefollowing form for hazard rate
ℎ (119905) = ℎ0 (119905) exp (120574z (119905)) (6)where ℎ0(119905) is the baseline hazard rate 120574 is a vector of coef-ficients and z(119905) contains time-dependent variables ℎ0(119905)can be either parametric (eg Weibull) or nonparametricand model parameters can be estimated by the maximumlikelihood method In this model the condition monitoringdata are viewed as time-dependent covariates in z(119905) Systemfailure distribution can be calculated based on (6)
236 Threshold Regression Model The parent process 119883(119905)and boundary set 119861 of the FHT model will both generallyhave parameters 119911 that depend on covariates that vary acrossindividuals 119892120579(119911119894) = 119911119894120573 [107] Cox Proportional Hazardregression is for most purposes a special case of Thresh-old Regression [108] Any family of proportional hazardfunctions can be generated by varying the time scales orboundaries of a TR model subject to only mild regulatoryconditions There is a connection between the shape of thehazard function (HF) and the type of failure mode (cause offailure) For example an increasingHF corresponds to agingwear-out and a decreasing hazard function generally suggestsa mixture of defective or other weak units leading to infantmortality
24 Condition BasedMaintenance Maintenance is defined asa set of activities or tasks used to restore an item to a state inwhich it can perform its designated functions Maintenancestrategies can be broadly classified into Corrective Main-tenance and Preventive Maintenance strategies [109 110]In corrective maintenance maintenance activities are onlycarried out after the failure happens and hence should only beused for noncritical systems On the other hand preventivemaintenance tries to prevent the failure from happening byusing either predetermined maintenance such as time-basedmaintenance or condition-based maintenance (CBM) Anexample of predetermined maintenance is the commonlysuggested practice of changing engine oil every 3000miles orthreemonths (whichever comes first) regardless of the actualoil condition In recent decades some companies such as GMhave developed oil life monitoring systems which allows carowners to change oil only when necessary (eg [111]) Suchsystem is an excellent example of CBM implementation Inrecent years CBM has become the most modern techniquediscussed in the literature and falls well within the frameworkof PHM
CBM is a maintenance program that makes maintenancedecisions based on the information collected about the
underlying system allowing maintenance activities to beperformed only when necessary The dominating objectiveof CBM in literature is to minimize the cost for maintenanceactivities It is worth pointing out that in some literature theterm ldquocondition based maintenancerdquo has a broader definitionthat also involves the preceding steps of data manipulationdiagnosis and prognosis (eg [30]) In this section werestrict our discussion to maintenance decision-making inCBM
The underpinning assumption of the PHM frameworkis that systems are subject to stochastic deteriorations Thenatural choice of maintenance strategy for stochastic deterio-rating systems is called ldquocontrol-limit policyrdquo or ldquofailure limitpolicyrdquo [110 112] wheremaintenance activities are conductedwhen the system deterioration reaches a certain level Undersuch policy prognostic results on system deterioration canbe used for maintenance decision-making The control-limitpolicy has been shown to be the optimal replacement rulefor systems with increasing deteriorations when consideringthe average long-run cost per unit time [113] Existing workon CBM can be classified in several ways depending on thenature of the system and the assumptions they make whichare (1) whether the system health condition is completelyobservable or partially observable (2) whether the conditionmonitoring is continuous or intermittent (3) whether themaintenance program deals with single component or mul-tiple components Note that these are not mutually exclusiveand a single work usually falls into multiple categories Belowwe discuss these topics in more detail
In condition monitoring the system health conditioncan be either completely or partially observedidentifiedThesystem health information obtained in the former case iscalled direct information while that in the latter case is calledindirect information While it is a critical issue for the degra-dation modeling and prognosis previously reviewed in thispaper it has no major impact on the maintenance decision-making For this reason we do not discuss this issue againhere interested readers are referred to Jardine et al [30]which summarized many works in this regard
Depending on the budget constraint andor technologiesused condition monitoring can be either continuous orintermittent (periodic or aperiodic) of which the latter isalso known as interval inspection The case of CBM withintermittent condition monitoring has been studied exten-sively in literature primarily due to its wide implementationin practice The important decision variables are the controllimitcritical level and inspection interval optimal criticallevel and inspection intervals are found based on criteriathat are mostly cost-based [114ndash117] In some works criticallevels are assumed to be predetermined by expert knowledgeand only optimal inspection strategies are studied [118ndash120]To provide more refined maintenance policies to minimizecost some researchers consider multiple control limits Forexample Castanier et al [121] used different thresholds forinspection scheduling partial repair preventive replacementand restarting for repairable systems With the developmentof sensing and information technology continuous conditionmonitoring has become available at reasonable costs inmany applications [122] Comparingwith interval inspection
Mathematical Problems in Engineering 9
Siglab analyzer
Gearbox system
Accelerometers
Laptop
(a)
Timing belt
Speed controller
Motor
Tested gear
Gearbox
Shaft 1
Shaft 2
Shaft 3
Brake controller
Brake
1
2 3
4
(b)
Figure 3 Experiment setup
Figure 4 Different crack levels in the gears
the research in this area is relatively new but has becomeincreasingly popular The fundamental difference of CBMwith continuous monitoring is that the real-time systeminformation allows maintenance decisions to be made at anytime and hence the greater chance to optimize the set criteria[123ndash128]
While majority of the existing work deals only with singlecomponent some researchers extend CBM to maintenancedecision-making for multiple components in the systemTherationale of developing multicomponent maintenance policyis that there are economic dependencies among multiplecomponents [129 130] High fixed maintenance cost suchas sending a maintenance team to a remote wind farmcan bemitigated by replacingrepairingmultiple componentssimultaneously [123 126 131 132]
3 Illustrative Case Studies
In this section we use three examples to illustrate theimplementation of PHM
31 Fault Diagnosis on Gear Crack Development Gearboxesare one of the most commonly used parts in machinery
Diagnosis of gear faults is crucial for preventing system mal-function In this example we demonstrate the fault diagnosisand classification for identifying different development stagesof cracks on gears in gearboxes [25 133] A gearbox test rigis shown in Figure 3 where gear 3 is the tested gear withpotential cracks Three different types of gears are tested (1)0 crack level (2) 25 crack level (3) 50 crack level asshown in Figure 4 The vibration signal is measured usingaccelerometers under various working conditions 3 levels ofload from the magnetic brake (no load half the maximumload and maximum load) and 4 levels of motor speed(1200 rpm 1400 rpm 1600 rpm and 1800 rpm) Three sets ofdata sample are obtained under each combination of the twofactors Hence we obtain 36 data samples for each crack levelThe data are then used for gear crack detection and crack levelclassification
All the ten time-domain features listed in Table 1 arecalculated as potential candidate features Six features peakmean root mean square (RMS) skewness kurtosis andshape factor are selected by ANOVA and TFSWT Afterfeature selection three methods are applied to classifyingthe three levels of gear cracks namely multinomial logitmodel (MLM) cumulative link model (CLM) and weighted
10 Mathematical Problems in Engineering
119896 nearest neighbor (WKNN) Interested readers are referredto Lei and Zuo [25] andHai et al [133] for technical details Toassess the performance of themethods a leave-one-out cross-validation approach is used the classification accuracies forMLM CLM and WKNN are 981 944 and near 100respectively The test results demonstrate that the proposedmethods can accurately identify the crack development ofgears which is very beneficial for early warning of potentialgearbox malfunction
32 Predicting RUL of Rotational Bearings In this section wereturn to the motivating example in Section 1 which aims topredict the RULof bearings As the purpose of PHM ismainlyto provide individualized prediction results it is necessary toadapt the model to specific characteristics of each bearingrevealed through past observations A natural choice is to useBayesian framework to integrate the prior information fromother bearings with observations of the in-service unit Byselecting the conjugate prior distributions model updatingcan be efficiently done
119875 (120573 | 1198841 1198842 119884119899) prop 119875 (1198841 1198842 119884119899 | 120573) sdot 120587 (120573) (7)
where 120573 is the model parameters 119884119894 is the observed vibrationmagnitude at time 119905119894 119875(1198841 1198842 119884119899 | 120573) is the likelihoodfunction given the parameter 120587(120573) is the prior distributioncarrying information from historical bearing samples and119875(120573 | 1198841 1198842 119884119899) is the posterior distribution of 120573 inte-grating the prior information and current observations Asnew observations are collected model updating can be donerepeatedly and correspondingly the predicted failure timewill also be updated
119875 (119884119896 | 1198841 1198842 119884119899)
= int119875 (120573 | 1198841 1198842 119884119899) sdot 119875 (119884119896 | 120573) 119889120573
(8)
where 119875(119884119896 | 1198841 1198842 119884119899) is the prediction of the vibrationmagnitude at some future time 119905119896 As 119899 increases the predic-tion will be more and more accurate with smaller varianceas demonstrated in Figure 5
In this example 25 bearings are tested and Figure 6 showsthe prediction interval of the failure time The 119909-axis is theindex of the bearings used in the experiments The circleswith the same 119909-axis value represent the 005 05 and 095quantiles of the failure time and the cross shows the truefailure timeThe results show that the prediction based on theabove algorithm is acceptably accurate In certain cases theprediction interval is very tight providing very informativewarnings on the potential failures
33 Predicting RUL of Lithium-Ion Batteries Using ParticleFilter Lithium-ion batteries are widely used in consumerelectronics as their sole power sources The importance ofbatteries to those devices is arguably critical As battery agesits capacity degrades and is widely used as an indicator of thebatteryrsquos health As a common rule a battery is consideredincapable of functioning as intended when its capacity dropsto 80 of its initial value In this example a particle filtering
0 100 200 300 400 5000
0005
001
0015
002
0025
003
0035
Residual life
Prob
abili
ty d
istrib
utio
n
70 failure time80 failure time
Figure 5 Predicted distribution of residual life at different observa-tion times
0 5 10 15 20 250
200
400
600
800
1000
1200
1400
1600
Bearing index
Failu
re ti
me
Figure 6 Prediction interval and the true values of failure timefor each bearing (triangle means last observed life time of bearingswhich have not yet failed)
(PF) based prognostic algorithm is used to predict RUL oflithium-ion batteries based on accelerating testing data of sixbatteries [134]
In the experiment batteries were tested with full chargingand discharging cycles under the constant-currentconstant-voltage mode The discharge rate was set to 1C which meantthe battery would be fully discharged in one hourThe experi-ment was conducted under room temperature and dischargecapacity was calculated based on integrating current overtime for each cycle Figure 7 shows the capacity degradationprocess of one testing battery
As capacity is used as the default health indicator ofbatteries there is no feature selection needed We proceed
Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
One limitation of frequency domain analysis is its inabil-ity to handle nonstationary waveform signals commonlyobserved during machine faults A combination of both timeand frequency domains time-frequency analysis has beendeveloped to solve the problem [40 41] A typical methodis called short-time Fourier transform (STFT) [42] whichdivides the whole waveform signal into segments with short-time window and then applies Fourier transform to eachsegment Wavelet transform is another popular method witha similar idea Wavelet analysis has been successfully appliedto feature extraction and fault diagnostics in various applica-tions (eg [43ndash47]) A review on the application of waveletanalysis in machine fault diagnosis and fault feature extrac-tion can be found in Peng and Chu [48] Other methods oftime-frequency analysis include spectrogram [49] Wigner-Ville distribution [50ndash52] and Choi-Williams distribution[53]
22 Fault Diagnostics and Classification Fault diagnosticsis designed to efficiently and accurately identify the rootcause of the faults Effective diagnosis can not only reducedowntime and repair cost but also provide useful informa-tion for prognostics to improve its accuracy Fault detectionis defined to be the task of determining if a system isexperiencing problems Fault diagnostics then is the taskof locating the source of a fault once it is detected Becauseof its importance researchers from different fields haveinvestigated the issue of fault diagnostics extensively such asin manufacturing processes [54 55] discrete event systems[56 57] and communication systems and networks [58 59]We do not attempt to give a comprehensive review but focuson the approaches that are commonly used in PHMpractices
In general methodologies in fault diagnostics can be clas-sified into two categoriesmodel based approaches andmodelfree approaches In the model based category some forms ofunderlying models linking failure modes and observationsare proposed These models are often derived accordingto first principles and physical mechanisms Based on themodel structure and parameters observations can be usedto infer the root causes or the failure modes using differentalgorithms In contrast model free methods often do notassume the knowledge of underlying processes Althoughin many cases implicit or statisticalsurrogate models areused in the fault diagnostics we use the name to emphasizethat approaches in this category are purely data-drivenwithout additional assumptions on the systemsrsquo operationmechanisms
In fault diagnostics we would like to know the exact timewhen a fault appears its location and its severity Thereforethe diagnostics consists of three aspects (1) anomaly detec-tion as we first identify any potential performance deviationfrom normal operation (2) fault localization which localizesthe problem to the specific component or subsystem (3)fault classification which discriminates known and unknownfaults and identifies the type of the fault if it is previouslyknown [60] Many popular methods from machine learningand artificial intelligence are applied in this context such assupport vectormachine [61 62] 119896-nearest neighbors [25 63]and decision trees [64 65] Among them artificial neural
network has been preferred by many engineers and widelyapplied to fault diagnostics of various engineering systems[28 66ndash69] Unsupervisedmachine learning algorithms suchas fuzzy 119888-means and self-organizing maps have been appliedwhen no response is provided [70ndash72] It is worthmentioningthat the sensitivity to a given fault is often a function of oper-ating conditions and the nature of the anomaly Thereforethe environmental conditions need careful consideration Forexample self-organizing maps are used for regionalization ofthe system operating conditions [60] Excellent reference forfundamentals of these methods can be found in Bishop [73]Hastie et al [74] and Kotsiantis et al [75]
23 Data-Driven Prognostics Method As mentioned inthe introduction prognostics algorithms predict the futurereliability of a product considering current and past healthinformation collected Through constant inspection theobserved health information is often referred to as conditionmonitoring (CM) data CM data may be directly or indirectlyrelated with the system health status and hence can beviewed as system health indicators Examples of CM dataare amount of tire wear chemical concentration size of afatigue crack power output of an amplifier and the lightintensity of LED As a system degrades inevitably throughusage its health status deteriorates and is manifested throughthe observed CM data (eg the light intensity decreases asthe LED degrades) Hence CM is normally viewed as thesystem degradation signal Failures are often defined asthe degradation reaches a predetermined threshold set byexperts Thus by modeling the evolution of degradation andcalculating the time it first hits the failure threshold we willbe able to predict the system remaining useful life (RUL)Due to randomness in the evolution paths of the degradationthe calculated RUL will be in the form of some probabilitydistribution Two excellent comprehensive review papers inRUL research can be found in Si et al [19] and Sikorska et al[20] The main difference between our paper and Si et al[19] could be understood through the illustration in Figure 2Our paper describes the entire process of data-drivenapproach related to PHM addresses the three PHMobjectives (fault diagnostics prognostics and conditional-based maintenance) and discusses additional prognosticsapproaches developed from other areas and relationshipsamong different approaches On the other hand Si et al [19]focusmainly on variousmodeling approaches for prognosticsand do not address the tasks before the three PHMobjectives Sikorska et al [20] focus on evaluating the variousprognostics approaches from the industry point of viewwithout details on methodologies
As a core ingredient of PHM we summarize the majorcategories of data-driven prognostics in this section
231 Independent Increment Process Based Model Generallyspeaking the stochastic process models (Table 2) consist oftwo basic components (1) a stochastic process 119883(119905) 119905 isin
T 119883 isin 120594 with initial value 119883(0) = 1199090 where T is thetime space and 120594 is the state space of the process and (2) aboundary set 119861 where 119861 sub 120594 Taking 119883(0) = 1199090 outside theboundary set 119861 the first hitting time (FHT) is the random
6 Mathematical Problems in Engineering
Table 2 Summary of three stochastic processes
Models FHT distributions Model parameters Shapes of hazard functionsWiener process Inverse Gaussian distribution Drift 120592 and variance 1205902 Upside down bathtubGamma process Approximate inverse Gaussian or B-S distributions Shape 120572 and scale 120573 Upside down bathtubInverse Gaussian process Approximate B-S distribution Mean 120583 and shape 120582 Upside down bathtub
variable 119879 defined as 119879 = inf119905 119883(119905) isin 119861 In most cases 119861is simplified as a threshold 119909⋆ (or119863) and the FHT is the firsttime when119883(119905) reaches 119909⋆
In stochastic process model it is supposed that thedegradation signal 119883(119905) 119905 isin T 119883 isin 120594 has stationaryindependent increment which means for any time 119905 andΔ119905 gt 0 the increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) onlydepends on Δ119905 and some other parameters denoted as 120593Usually Δ119883(119905) follows a distribution that possesses theproperty of additivity For example ifΔ119883(119905) follows aNormaldistribution119873(120583Δ119905 1205902Δ119905) and119883(0) = 0 then119883(119905)will followa Normal distribution 119873(120583119905 120590
2119905) and 119883(119905) is the Wiener
process Other typical choices of the Δ119883(119905) distribution areGamma distribution and inverse Gaussian distribution inwhich cases 119883(119905) will be correspondingly called Gammaprocesses and inverse Gaussian processes
Wiener Process A Wiener process 119883(119905) 119905 ⩾ 0 can be repre-sented as119883(119905) = 120582119905+120590119861(119905)where 120582 is a drift parameter 120590 gt 0is a diffusion coefficient and 119861(119905) is the standard Brownianmotion The Probability Density Function (PDF) of the firsthitting time 119879 is the inverse Gaussian distribution IG((119909⋆ minus1199090)120582 (119909
⋆minus 1199090)2120590
2) The process varies bidirectionally over
timewithGaussian noises It only uses information containedin the current degradation status Please refer to [76ndash81] formore information Recently there are some new researchesunder this framework and use the history information givenby the entire sequence of observations These models updatethe parameters recursively so the prognostics is historydependent [82 83]
Gamma Process One disadvantage of the Wiener process isthat it is notmonotonewith the Brownianmotion embeddedFor modeling monotonically increasingdecreasing degrada-tion signals the Gamma process is a better choice Herethe increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) for a given timeinterval Δ119905 has a Gamma distribution Ga(120572Δ119905 120590) with shapeparameter 120572Δ119905 gt 0 and scale parameter 120590 gt 0 A Gammaprocess has monotonic sample paths and can be viewed asthe limit of a compound Poisson process whose rate goesto infinity while the jump size tends to zero in proportionThe first hitting time has an inverse Gamma distributiondefined by the identity 119875(119879 gt 119905) = 119875(119883(119905) lt 119909
lowast) Details
of modeling degradation with Gamma process are given bySingpurwalla [84] Lawless and Crowder [85] and Ye et al[86] and maintenance related issues are considered by vanNoortwijk [87]
Inverse Gaussian Process An inverse Gaussian process119883(119905) 119905 ⩾ 0 with mean function V(119905) and scale parameter120578 has the following properties The increment Δ119883(119905) has
an inverse Gaussian distribution IG(Δ119905 120578(Δ119905)2) Like theGamma process the inverse Gaussian process also has amonotone path and the failure time distribution approx-imated a Birnbaum-Saunders type distribution which hasexcellent properties for future computationThe IG process isrelatively new and has not beenwidely applied in degradationmodeling even though it is more flexible in incorporatingrandom effects and covariates It was introduced in Wangand Xu [88] to incorporate random effects The randomdrift model random volatility model random drift-volatilitymodel and incorporating covariates are thoroughly studiedby Ye and Chen [89]
232Markovian Process-BasedModels Another set ofmeth-ods are built based on the memoryless Markov processesAlthough Markov process still belongs to stochastic pro-cesses these methods are different from the previouslymentioned models in the sense that they assume a finite stateof the degradation and focus on the transition probabilityamong those states The methods in this category have thefollowing major variations
Markov Chain Model In general it is assumed that thedegradation process 119883119899 119899 ⩾ 0 evolves on a finite state spaceΦ = 0 1 119873 with 0 corresponding to the perfect healthystate and 119873 representing the failed state of the monitoredsystem The RUL at time instant 119899 can be defined as 119879 =
inf119905 119883119899+119905 = 119873 | 119883119899 = 119873The probability transitionmatrixand the number of the states can be estimated from historicaldata By dividing the health status into discrete states such asldquoGoodrdquo ldquoOKrdquo ldquoMinor defectsrdquo ldquoMaintenance requiredrdquo andldquoUnserviceablerdquo the method can provide meaningful resultsthat are easier to be understood by field engineers
Semi-Markov Processes A semi-Markov process 119883(119905) 119905 ⩾ 0extends the Markov chain model by including the randomtime that the process resides in each state Although theMarkov property is generally lost by this extension themodelremains of great practical value In a semi-Markovmodel thefirst hitting time represents the time that the process residesin the initial and subsequent states before it first enters one ofthe states that define set 119861
Hidden Markov Model (HMM) HMM consists of twostochastic processes a hidden Markov chain 119885119899 119899 ⩾ 0which is unobservable and represents the real state of thedegradation and an observable process 119884119899 119899 ⩾ 0 which isthe observed signal from monitoring Similar to Markovian-based models it is assumed that the degradation processevolves according to a Markov chain on a finite state spaceGenerally a conditional probability measure 119875(119884119899 | 119885119899 = 119894)
Mathematical Problems in Engineering 7
119894 isin Φ is used to link 119884119899 119899 ⩾ 0 and 119885119899 119899 ⩾ 0 As such theRUL at time instant 119899 can be defined as 119879 = inf119905 119885119899+119905 =119873 | 119885119899 = 119873 119884119895 0 le 119895 le 119899Themodel is preferred when onlyindirect observations are available [90]
233 Filtering-Based Models Similar as the HMM theKalman filtering model does not use the CM directly as thetrue degradation signal It assumes that the true state of thedegradation is unobservable but related with CM data TheKalman filtering model considers the unobserved condition119909119905 and the observed CM data 119910119905 such that 119909119905 = 120572119909119905minus1 + 120598119905
and 119910119905 = 120573119909119905 + 120578119905 where 120598119905 and 120578119905 are Gaussian noises and120572 and 120573 are the parameters of the state space model TheKalman filtering model takes advantage of all historical dataunlike many methods that only depend on the last CMstatus However the linear assumption and Gaussian noiseassumption limit its applications Efforts have been made toovercome these problems (eg [91 92])
234 Regression Based Model Methods in this categorymostly involve building parametric evolution path (linear ornonlinear) of CM data with random effects Most existingmethods in RUL estimation assume that products of thesame type or from the same batch have exactly the samefailure characteristics probabilistically While the populationbehavior can provide some reference they cannot accuratelyreflect the health evolution for each individual item sinceindividual products often experience different usage patternsdistinct environments or evendifferent quality due to processvariations Consequently it is crucial to adapt to the healthevolutions of each individual product rather than perceivedgroup averages for better reliability prediction In recentyears some methods have been proposed to incorporate thepopulation information with observations from individualitems to get better RUL estimation
Meeker and Escobar [93] give an example of a lineardegradation with Log-normal rate
119883 (119905) = 1205730 + 1205731119905 (1)
where 1205730 is fixed 1205731 sim LOGNOR(120583 120590) and 119863 is thepredetermined threshold thus the distribution of failure timewill be
119865 (119905 1205730 120583 120590) = 119875 (1205730 + 1205731119905 gt 119863) = 119875(1205731 gt119863 minus 1205730
119905
)
= Φnor (log (119905) minus [log (119863 minus 1205730) minus 120583]
120590
)
119905 gt 0
(2)
Lu andMeeker [94] proposed several random coefficientsmodel to describe individual health degradation by consider-ing both population trend and individual unit characteristicsthrough fixed and random effects respectively
119910119894119895 = 119891 (119905119895 120601 120579119894) + 120576119894119895 (3)
where 119910119894119895 is the degradation signal of item 119894 at time 119905119895 120601 is theparameters for the fixed effects and 120579119894 is the parameters of
randomeffects for item 119894 Based on (3) the distribution of fail-ure time defined as119879 = inf119905 119891(119905 120601 120579119894)+120598119894119895 gt 119863where119863 isthe predetermined threshold can be computed analytically ornumerically Different examples were illustrated for differentdegradation models and distributions of random effects 120579119894 inthe paper K Yang andG Yang [95] extended the idea and uti-lized both the life time data of failed devices and degradationinformation from unfailed ones to improve the model esti-mation Along this line with applications in a variety of fieldsother representative works include Yang and Jeang [96]Tseng et al [97] and Goode et al [98] Although in theseresults the individual-to-individual variation has been con-sidered using random effects the data from individual itemare only used to assess the variability among items in thepopulation and fit the random effects distribution 119866120579 Theprediction of failure time is still population-wise althoughit considers the variability within the population In certainsense the prediction interval is inflated to cover differentdegradation paths
Gebraeel and his colleagues [17 18 99] instead developeda Bayesian framework to model the degradation signals andpredict the residual life distribution Different from previousworks the residual life prediction is ldquocustomizedrdquo based onthe data from each individual For example the degradationsignal can be modeled by
119871 (119905119894) = 120579 + 120573 sdot 119905119894 + 120576 (119905119894) (4)
where 120579 and 120573 are random variables following certain dis-tribution and 120576 is measurement error (independent normalor Brownian motion) From historical data the joint distri-bution of 120579 and 120573 denoted by 119875(120579 120573) can be estimated asprior knowledge regarding the population characteristics ofdegradation For each operating new individual the vibrationsignals are collected and used to update the degradationmodel using Bayesian method
119875 120579 120573 | 119871 (1199051) 119871 (1199052) 119871 (119905119896)
prop 119875 119871 (1199051) 119871 (1199052) 119871 (119905119896) | 120579 120573 sdot 119875 (120579 120573)
(5)
where the left hand side of (5) represents the posteriordistribution of parameters of the degradationmodel (4) givenobservations up to time 119905119896 the first term on the right handside corresponds to the likelihood function of the observeddata implied by (4) with fixed 120579 and 120573 and the last term is the(estimated) prior distribution of themodel parameters withinthe population In other words the degradation model foreach individual is self-updating when new observations areavailable It is expected that the predicted failure time basedon the posterior degradation model will be more accurate
Due to its simplicity and natural integration Bayesianframework has continuously been investigated in the liter-ature to provide more accurate degradation modeling andfailure prognostics For example Xu and Zhou [100] studiedthemodeling and prognostics using general nonlinear degra-dation paths where the Bayesian basedmodel estimation andMonte Carlo based failure time prediction were presentedChen and Tsui [101] extended this to a two-phase modelwhich allows for a change point of the linear degradation
8 Mathematical Problems in Engineering
Thismodel captures the deterioration of the bearing indicatedby the vibration signal Other references on this topic areGebraeel and Lawley [102] and Si et al [82 83]
235 Proportional Hazard Model Proportional hazardmodel [103] has been extensively studied in various areasProportional hazard model with time-dependent variable(s)is able to incorporate both event data and CM data whichcan be particularly useful in cases of uncertain failurethresholds or hard failures [104ndash106]Themodel assumes thefollowing form for hazard rate
ℎ (119905) = ℎ0 (119905) exp (120574z (119905)) (6)where ℎ0(119905) is the baseline hazard rate 120574 is a vector of coef-ficients and z(119905) contains time-dependent variables ℎ0(119905)can be either parametric (eg Weibull) or nonparametricand model parameters can be estimated by the maximumlikelihood method In this model the condition monitoringdata are viewed as time-dependent covariates in z(119905) Systemfailure distribution can be calculated based on (6)
236 Threshold Regression Model The parent process 119883(119905)and boundary set 119861 of the FHT model will both generallyhave parameters 119911 that depend on covariates that vary acrossindividuals 119892120579(119911119894) = 119911119894120573 [107] Cox Proportional Hazardregression is for most purposes a special case of Thresh-old Regression [108] Any family of proportional hazardfunctions can be generated by varying the time scales orboundaries of a TR model subject to only mild regulatoryconditions There is a connection between the shape of thehazard function (HF) and the type of failure mode (cause offailure) For example an increasingHF corresponds to agingwear-out and a decreasing hazard function generally suggestsa mixture of defective or other weak units leading to infantmortality
24 Condition BasedMaintenance Maintenance is defined asa set of activities or tasks used to restore an item to a state inwhich it can perform its designated functions Maintenancestrategies can be broadly classified into Corrective Main-tenance and Preventive Maintenance strategies [109 110]In corrective maintenance maintenance activities are onlycarried out after the failure happens and hence should only beused for noncritical systems On the other hand preventivemaintenance tries to prevent the failure from happening byusing either predetermined maintenance such as time-basedmaintenance or condition-based maintenance (CBM) Anexample of predetermined maintenance is the commonlysuggested practice of changing engine oil every 3000miles orthreemonths (whichever comes first) regardless of the actualoil condition In recent decades some companies such as GMhave developed oil life monitoring systems which allows carowners to change oil only when necessary (eg [111]) Suchsystem is an excellent example of CBM implementation Inrecent years CBM has become the most modern techniquediscussed in the literature and falls well within the frameworkof PHM
CBM is a maintenance program that makes maintenancedecisions based on the information collected about the
underlying system allowing maintenance activities to beperformed only when necessary The dominating objectiveof CBM in literature is to minimize the cost for maintenanceactivities It is worth pointing out that in some literature theterm ldquocondition based maintenancerdquo has a broader definitionthat also involves the preceding steps of data manipulationdiagnosis and prognosis (eg [30]) In this section werestrict our discussion to maintenance decision-making inCBM
The underpinning assumption of the PHM frameworkis that systems are subject to stochastic deteriorations Thenatural choice of maintenance strategy for stochastic deterio-rating systems is called ldquocontrol-limit policyrdquo or ldquofailure limitpolicyrdquo [110 112] wheremaintenance activities are conductedwhen the system deterioration reaches a certain level Undersuch policy prognostic results on system deterioration canbe used for maintenance decision-making The control-limitpolicy has been shown to be the optimal replacement rulefor systems with increasing deteriorations when consideringthe average long-run cost per unit time [113] Existing workon CBM can be classified in several ways depending on thenature of the system and the assumptions they make whichare (1) whether the system health condition is completelyobservable or partially observable (2) whether the conditionmonitoring is continuous or intermittent (3) whether themaintenance program deals with single component or mul-tiple components Note that these are not mutually exclusiveand a single work usually falls into multiple categories Belowwe discuss these topics in more detail
In condition monitoring the system health conditioncan be either completely or partially observedidentifiedThesystem health information obtained in the former case iscalled direct information while that in the latter case is calledindirect information While it is a critical issue for the degra-dation modeling and prognosis previously reviewed in thispaper it has no major impact on the maintenance decision-making For this reason we do not discuss this issue againhere interested readers are referred to Jardine et al [30]which summarized many works in this regard
Depending on the budget constraint andor technologiesused condition monitoring can be either continuous orintermittent (periodic or aperiodic) of which the latter isalso known as interval inspection The case of CBM withintermittent condition monitoring has been studied exten-sively in literature primarily due to its wide implementationin practice The important decision variables are the controllimitcritical level and inspection interval optimal criticallevel and inspection intervals are found based on criteriathat are mostly cost-based [114ndash117] In some works criticallevels are assumed to be predetermined by expert knowledgeand only optimal inspection strategies are studied [118ndash120]To provide more refined maintenance policies to minimizecost some researchers consider multiple control limits Forexample Castanier et al [121] used different thresholds forinspection scheduling partial repair preventive replacementand restarting for repairable systems With the developmentof sensing and information technology continuous conditionmonitoring has become available at reasonable costs inmany applications [122] Comparingwith interval inspection
Mathematical Problems in Engineering 9
Siglab analyzer
Gearbox system
Accelerometers
Laptop
(a)
Timing belt
Speed controller
Motor
Tested gear
Gearbox
Shaft 1
Shaft 2
Shaft 3
Brake controller
Brake
1
2 3
4
(b)
Figure 3 Experiment setup
Figure 4 Different crack levels in the gears
the research in this area is relatively new but has becomeincreasingly popular The fundamental difference of CBMwith continuous monitoring is that the real-time systeminformation allows maintenance decisions to be made at anytime and hence the greater chance to optimize the set criteria[123ndash128]
While majority of the existing work deals only with singlecomponent some researchers extend CBM to maintenancedecision-making for multiple components in the systemTherationale of developing multicomponent maintenance policyis that there are economic dependencies among multiplecomponents [129 130] High fixed maintenance cost suchas sending a maintenance team to a remote wind farmcan bemitigated by replacingrepairingmultiple componentssimultaneously [123 126 131 132]
3 Illustrative Case Studies
In this section we use three examples to illustrate theimplementation of PHM
31 Fault Diagnosis on Gear Crack Development Gearboxesare one of the most commonly used parts in machinery
Diagnosis of gear faults is crucial for preventing system mal-function In this example we demonstrate the fault diagnosisand classification for identifying different development stagesof cracks on gears in gearboxes [25 133] A gearbox test rigis shown in Figure 3 where gear 3 is the tested gear withpotential cracks Three different types of gears are tested (1)0 crack level (2) 25 crack level (3) 50 crack level asshown in Figure 4 The vibration signal is measured usingaccelerometers under various working conditions 3 levels ofload from the magnetic brake (no load half the maximumload and maximum load) and 4 levels of motor speed(1200 rpm 1400 rpm 1600 rpm and 1800 rpm) Three sets ofdata sample are obtained under each combination of the twofactors Hence we obtain 36 data samples for each crack levelThe data are then used for gear crack detection and crack levelclassification
All the ten time-domain features listed in Table 1 arecalculated as potential candidate features Six features peakmean root mean square (RMS) skewness kurtosis andshape factor are selected by ANOVA and TFSWT Afterfeature selection three methods are applied to classifyingthe three levels of gear cracks namely multinomial logitmodel (MLM) cumulative link model (CLM) and weighted
10 Mathematical Problems in Engineering
119896 nearest neighbor (WKNN) Interested readers are referredto Lei and Zuo [25] andHai et al [133] for technical details Toassess the performance of themethods a leave-one-out cross-validation approach is used the classification accuracies forMLM CLM and WKNN are 981 944 and near 100respectively The test results demonstrate that the proposedmethods can accurately identify the crack development ofgears which is very beneficial for early warning of potentialgearbox malfunction
32 Predicting RUL of Rotational Bearings In this section wereturn to the motivating example in Section 1 which aims topredict the RULof bearings As the purpose of PHM ismainlyto provide individualized prediction results it is necessary toadapt the model to specific characteristics of each bearingrevealed through past observations A natural choice is to useBayesian framework to integrate the prior information fromother bearings with observations of the in-service unit Byselecting the conjugate prior distributions model updatingcan be efficiently done
119875 (120573 | 1198841 1198842 119884119899) prop 119875 (1198841 1198842 119884119899 | 120573) sdot 120587 (120573) (7)
where 120573 is the model parameters 119884119894 is the observed vibrationmagnitude at time 119905119894 119875(1198841 1198842 119884119899 | 120573) is the likelihoodfunction given the parameter 120587(120573) is the prior distributioncarrying information from historical bearing samples and119875(120573 | 1198841 1198842 119884119899) is the posterior distribution of 120573 inte-grating the prior information and current observations Asnew observations are collected model updating can be donerepeatedly and correspondingly the predicted failure timewill also be updated
119875 (119884119896 | 1198841 1198842 119884119899)
= int119875 (120573 | 1198841 1198842 119884119899) sdot 119875 (119884119896 | 120573) 119889120573
(8)
where 119875(119884119896 | 1198841 1198842 119884119899) is the prediction of the vibrationmagnitude at some future time 119905119896 As 119899 increases the predic-tion will be more and more accurate with smaller varianceas demonstrated in Figure 5
In this example 25 bearings are tested and Figure 6 showsthe prediction interval of the failure time The 119909-axis is theindex of the bearings used in the experiments The circleswith the same 119909-axis value represent the 005 05 and 095quantiles of the failure time and the cross shows the truefailure timeThe results show that the prediction based on theabove algorithm is acceptably accurate In certain cases theprediction interval is very tight providing very informativewarnings on the potential failures
33 Predicting RUL of Lithium-Ion Batteries Using ParticleFilter Lithium-ion batteries are widely used in consumerelectronics as their sole power sources The importance ofbatteries to those devices is arguably critical As battery agesits capacity degrades and is widely used as an indicator of thebatteryrsquos health As a common rule a battery is consideredincapable of functioning as intended when its capacity dropsto 80 of its initial value In this example a particle filtering
0 100 200 300 400 5000
0005
001
0015
002
0025
003
0035
Residual life
Prob
abili
ty d
istrib
utio
n
70 failure time80 failure time
Figure 5 Predicted distribution of residual life at different observa-tion times
0 5 10 15 20 250
200
400
600
800
1000
1200
1400
1600
Bearing index
Failu
re ti
me
Figure 6 Prediction interval and the true values of failure timefor each bearing (triangle means last observed life time of bearingswhich have not yet failed)
(PF) based prognostic algorithm is used to predict RUL oflithium-ion batteries based on accelerating testing data of sixbatteries [134]
In the experiment batteries were tested with full chargingand discharging cycles under the constant-currentconstant-voltage mode The discharge rate was set to 1C which meantthe battery would be fully discharged in one hourThe experi-ment was conducted under room temperature and dischargecapacity was calculated based on integrating current overtime for each cycle Figure 7 shows the capacity degradationprocess of one testing battery
As capacity is used as the default health indicator ofbatteries there is no feature selection needed We proceed
Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Table 2 Summary of three stochastic processes
Models FHT distributions Model parameters Shapes of hazard functionsWiener process Inverse Gaussian distribution Drift 120592 and variance 1205902 Upside down bathtubGamma process Approximate inverse Gaussian or B-S distributions Shape 120572 and scale 120573 Upside down bathtubInverse Gaussian process Approximate B-S distribution Mean 120583 and shape 120582 Upside down bathtub
variable 119879 defined as 119879 = inf119905 119883(119905) isin 119861 In most cases 119861is simplified as a threshold 119909⋆ (or119863) and the FHT is the firsttime when119883(119905) reaches 119909⋆
In stochastic process model it is supposed that thedegradation signal 119883(119905) 119905 isin T 119883 isin 120594 has stationaryindependent increment which means for any time 119905 andΔ119905 gt 0 the increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) onlydepends on Δ119905 and some other parameters denoted as 120593Usually Δ119883(119905) follows a distribution that possesses theproperty of additivity For example ifΔ119883(119905) follows aNormaldistribution119873(120583Δ119905 1205902Δ119905) and119883(0) = 0 then119883(119905)will followa Normal distribution 119873(120583119905 120590
2119905) and 119883(119905) is the Wiener
process Other typical choices of the Δ119883(119905) distribution areGamma distribution and inverse Gaussian distribution inwhich cases 119883(119905) will be correspondingly called Gammaprocesses and inverse Gaussian processes
Wiener Process A Wiener process 119883(119905) 119905 ⩾ 0 can be repre-sented as119883(119905) = 120582119905+120590119861(119905)where 120582 is a drift parameter 120590 gt 0is a diffusion coefficient and 119861(119905) is the standard Brownianmotion The Probability Density Function (PDF) of the firsthitting time 119879 is the inverse Gaussian distribution IG((119909⋆ minus1199090)120582 (119909
⋆minus 1199090)2120590
2) The process varies bidirectionally over
timewithGaussian noises It only uses information containedin the current degradation status Please refer to [76ndash81] formore information Recently there are some new researchesunder this framework and use the history information givenby the entire sequence of observations These models updatethe parameters recursively so the prognostics is historydependent [82 83]
Gamma Process One disadvantage of the Wiener process isthat it is notmonotonewith the Brownianmotion embeddedFor modeling monotonically increasingdecreasing degrada-tion signals the Gamma process is a better choice Herethe increment Δ119883(119905) = 119883(119905 + Δ119905) minus 119883(119905) for a given timeinterval Δ119905 has a Gamma distribution Ga(120572Δ119905 120590) with shapeparameter 120572Δ119905 gt 0 and scale parameter 120590 gt 0 A Gammaprocess has monotonic sample paths and can be viewed asthe limit of a compound Poisson process whose rate goesto infinity while the jump size tends to zero in proportionThe first hitting time has an inverse Gamma distributiondefined by the identity 119875(119879 gt 119905) = 119875(119883(119905) lt 119909
lowast) Details
of modeling degradation with Gamma process are given bySingpurwalla [84] Lawless and Crowder [85] and Ye et al[86] and maintenance related issues are considered by vanNoortwijk [87]
Inverse Gaussian Process An inverse Gaussian process119883(119905) 119905 ⩾ 0 with mean function V(119905) and scale parameter120578 has the following properties The increment Δ119883(119905) has
an inverse Gaussian distribution IG(Δ119905 120578(Δ119905)2) Like theGamma process the inverse Gaussian process also has amonotone path and the failure time distribution approx-imated a Birnbaum-Saunders type distribution which hasexcellent properties for future computationThe IG process isrelatively new and has not beenwidely applied in degradationmodeling even though it is more flexible in incorporatingrandom effects and covariates It was introduced in Wangand Xu [88] to incorporate random effects The randomdrift model random volatility model random drift-volatilitymodel and incorporating covariates are thoroughly studiedby Ye and Chen [89]
232Markovian Process-BasedModels Another set ofmeth-ods are built based on the memoryless Markov processesAlthough Markov process still belongs to stochastic pro-cesses these methods are different from the previouslymentioned models in the sense that they assume a finite stateof the degradation and focus on the transition probabilityamong those states The methods in this category have thefollowing major variations
Markov Chain Model In general it is assumed that thedegradation process 119883119899 119899 ⩾ 0 evolves on a finite state spaceΦ = 0 1 119873 with 0 corresponding to the perfect healthystate and 119873 representing the failed state of the monitoredsystem The RUL at time instant 119899 can be defined as 119879 =
inf119905 119883119899+119905 = 119873 | 119883119899 = 119873The probability transitionmatrixand the number of the states can be estimated from historicaldata By dividing the health status into discrete states such asldquoGoodrdquo ldquoOKrdquo ldquoMinor defectsrdquo ldquoMaintenance requiredrdquo andldquoUnserviceablerdquo the method can provide meaningful resultsthat are easier to be understood by field engineers
Semi-Markov Processes A semi-Markov process 119883(119905) 119905 ⩾ 0extends the Markov chain model by including the randomtime that the process resides in each state Although theMarkov property is generally lost by this extension themodelremains of great practical value In a semi-Markovmodel thefirst hitting time represents the time that the process residesin the initial and subsequent states before it first enters one ofthe states that define set 119861
Hidden Markov Model (HMM) HMM consists of twostochastic processes a hidden Markov chain 119885119899 119899 ⩾ 0which is unobservable and represents the real state of thedegradation and an observable process 119884119899 119899 ⩾ 0 which isthe observed signal from monitoring Similar to Markovian-based models it is assumed that the degradation processevolves according to a Markov chain on a finite state spaceGenerally a conditional probability measure 119875(119884119899 | 119885119899 = 119894)
Mathematical Problems in Engineering 7
119894 isin Φ is used to link 119884119899 119899 ⩾ 0 and 119885119899 119899 ⩾ 0 As such theRUL at time instant 119899 can be defined as 119879 = inf119905 119885119899+119905 =119873 | 119885119899 = 119873 119884119895 0 le 119895 le 119899Themodel is preferred when onlyindirect observations are available [90]
233 Filtering-Based Models Similar as the HMM theKalman filtering model does not use the CM directly as thetrue degradation signal It assumes that the true state of thedegradation is unobservable but related with CM data TheKalman filtering model considers the unobserved condition119909119905 and the observed CM data 119910119905 such that 119909119905 = 120572119909119905minus1 + 120598119905
and 119910119905 = 120573119909119905 + 120578119905 where 120598119905 and 120578119905 are Gaussian noises and120572 and 120573 are the parameters of the state space model TheKalman filtering model takes advantage of all historical dataunlike many methods that only depend on the last CMstatus However the linear assumption and Gaussian noiseassumption limit its applications Efforts have been made toovercome these problems (eg [91 92])
234 Regression Based Model Methods in this categorymostly involve building parametric evolution path (linear ornonlinear) of CM data with random effects Most existingmethods in RUL estimation assume that products of thesame type or from the same batch have exactly the samefailure characteristics probabilistically While the populationbehavior can provide some reference they cannot accuratelyreflect the health evolution for each individual item sinceindividual products often experience different usage patternsdistinct environments or evendifferent quality due to processvariations Consequently it is crucial to adapt to the healthevolutions of each individual product rather than perceivedgroup averages for better reliability prediction In recentyears some methods have been proposed to incorporate thepopulation information with observations from individualitems to get better RUL estimation
Meeker and Escobar [93] give an example of a lineardegradation with Log-normal rate
119883 (119905) = 1205730 + 1205731119905 (1)
where 1205730 is fixed 1205731 sim LOGNOR(120583 120590) and 119863 is thepredetermined threshold thus the distribution of failure timewill be
119865 (119905 1205730 120583 120590) = 119875 (1205730 + 1205731119905 gt 119863) = 119875(1205731 gt119863 minus 1205730
119905
)
= Φnor (log (119905) minus [log (119863 minus 1205730) minus 120583]
120590
)
119905 gt 0
(2)
Lu andMeeker [94] proposed several random coefficientsmodel to describe individual health degradation by consider-ing both population trend and individual unit characteristicsthrough fixed and random effects respectively
119910119894119895 = 119891 (119905119895 120601 120579119894) + 120576119894119895 (3)
where 119910119894119895 is the degradation signal of item 119894 at time 119905119895 120601 is theparameters for the fixed effects and 120579119894 is the parameters of
randomeffects for item 119894 Based on (3) the distribution of fail-ure time defined as119879 = inf119905 119891(119905 120601 120579119894)+120598119894119895 gt 119863where119863 isthe predetermined threshold can be computed analytically ornumerically Different examples were illustrated for differentdegradation models and distributions of random effects 120579119894 inthe paper K Yang andG Yang [95] extended the idea and uti-lized both the life time data of failed devices and degradationinformation from unfailed ones to improve the model esti-mation Along this line with applications in a variety of fieldsother representative works include Yang and Jeang [96]Tseng et al [97] and Goode et al [98] Although in theseresults the individual-to-individual variation has been con-sidered using random effects the data from individual itemare only used to assess the variability among items in thepopulation and fit the random effects distribution 119866120579 Theprediction of failure time is still population-wise althoughit considers the variability within the population In certainsense the prediction interval is inflated to cover differentdegradation paths
Gebraeel and his colleagues [17 18 99] instead developeda Bayesian framework to model the degradation signals andpredict the residual life distribution Different from previousworks the residual life prediction is ldquocustomizedrdquo based onthe data from each individual For example the degradationsignal can be modeled by
119871 (119905119894) = 120579 + 120573 sdot 119905119894 + 120576 (119905119894) (4)
where 120579 and 120573 are random variables following certain dis-tribution and 120576 is measurement error (independent normalor Brownian motion) From historical data the joint distri-bution of 120579 and 120573 denoted by 119875(120579 120573) can be estimated asprior knowledge regarding the population characteristics ofdegradation For each operating new individual the vibrationsignals are collected and used to update the degradationmodel using Bayesian method
119875 120579 120573 | 119871 (1199051) 119871 (1199052) 119871 (119905119896)
prop 119875 119871 (1199051) 119871 (1199052) 119871 (119905119896) | 120579 120573 sdot 119875 (120579 120573)
(5)
where the left hand side of (5) represents the posteriordistribution of parameters of the degradationmodel (4) givenobservations up to time 119905119896 the first term on the right handside corresponds to the likelihood function of the observeddata implied by (4) with fixed 120579 and 120573 and the last term is the(estimated) prior distribution of themodel parameters withinthe population In other words the degradation model foreach individual is self-updating when new observations areavailable It is expected that the predicted failure time basedon the posterior degradation model will be more accurate
Due to its simplicity and natural integration Bayesianframework has continuously been investigated in the liter-ature to provide more accurate degradation modeling andfailure prognostics For example Xu and Zhou [100] studiedthemodeling and prognostics using general nonlinear degra-dation paths where the Bayesian basedmodel estimation andMonte Carlo based failure time prediction were presentedChen and Tsui [101] extended this to a two-phase modelwhich allows for a change point of the linear degradation
8 Mathematical Problems in Engineering
Thismodel captures the deterioration of the bearing indicatedby the vibration signal Other references on this topic areGebraeel and Lawley [102] and Si et al [82 83]
235 Proportional Hazard Model Proportional hazardmodel [103] has been extensively studied in various areasProportional hazard model with time-dependent variable(s)is able to incorporate both event data and CM data whichcan be particularly useful in cases of uncertain failurethresholds or hard failures [104ndash106]Themodel assumes thefollowing form for hazard rate
ℎ (119905) = ℎ0 (119905) exp (120574z (119905)) (6)where ℎ0(119905) is the baseline hazard rate 120574 is a vector of coef-ficients and z(119905) contains time-dependent variables ℎ0(119905)can be either parametric (eg Weibull) or nonparametricand model parameters can be estimated by the maximumlikelihood method In this model the condition monitoringdata are viewed as time-dependent covariates in z(119905) Systemfailure distribution can be calculated based on (6)
236 Threshold Regression Model The parent process 119883(119905)and boundary set 119861 of the FHT model will both generallyhave parameters 119911 that depend on covariates that vary acrossindividuals 119892120579(119911119894) = 119911119894120573 [107] Cox Proportional Hazardregression is for most purposes a special case of Thresh-old Regression [108] Any family of proportional hazardfunctions can be generated by varying the time scales orboundaries of a TR model subject to only mild regulatoryconditions There is a connection between the shape of thehazard function (HF) and the type of failure mode (cause offailure) For example an increasingHF corresponds to agingwear-out and a decreasing hazard function generally suggestsa mixture of defective or other weak units leading to infantmortality
24 Condition BasedMaintenance Maintenance is defined asa set of activities or tasks used to restore an item to a state inwhich it can perform its designated functions Maintenancestrategies can be broadly classified into Corrective Main-tenance and Preventive Maintenance strategies [109 110]In corrective maintenance maintenance activities are onlycarried out after the failure happens and hence should only beused for noncritical systems On the other hand preventivemaintenance tries to prevent the failure from happening byusing either predetermined maintenance such as time-basedmaintenance or condition-based maintenance (CBM) Anexample of predetermined maintenance is the commonlysuggested practice of changing engine oil every 3000miles orthreemonths (whichever comes first) regardless of the actualoil condition In recent decades some companies such as GMhave developed oil life monitoring systems which allows carowners to change oil only when necessary (eg [111]) Suchsystem is an excellent example of CBM implementation Inrecent years CBM has become the most modern techniquediscussed in the literature and falls well within the frameworkof PHM
CBM is a maintenance program that makes maintenancedecisions based on the information collected about the
underlying system allowing maintenance activities to beperformed only when necessary The dominating objectiveof CBM in literature is to minimize the cost for maintenanceactivities It is worth pointing out that in some literature theterm ldquocondition based maintenancerdquo has a broader definitionthat also involves the preceding steps of data manipulationdiagnosis and prognosis (eg [30]) In this section werestrict our discussion to maintenance decision-making inCBM
The underpinning assumption of the PHM frameworkis that systems are subject to stochastic deteriorations Thenatural choice of maintenance strategy for stochastic deterio-rating systems is called ldquocontrol-limit policyrdquo or ldquofailure limitpolicyrdquo [110 112] wheremaintenance activities are conductedwhen the system deterioration reaches a certain level Undersuch policy prognostic results on system deterioration canbe used for maintenance decision-making The control-limitpolicy has been shown to be the optimal replacement rulefor systems with increasing deteriorations when consideringthe average long-run cost per unit time [113] Existing workon CBM can be classified in several ways depending on thenature of the system and the assumptions they make whichare (1) whether the system health condition is completelyobservable or partially observable (2) whether the conditionmonitoring is continuous or intermittent (3) whether themaintenance program deals with single component or mul-tiple components Note that these are not mutually exclusiveand a single work usually falls into multiple categories Belowwe discuss these topics in more detail
In condition monitoring the system health conditioncan be either completely or partially observedidentifiedThesystem health information obtained in the former case iscalled direct information while that in the latter case is calledindirect information While it is a critical issue for the degra-dation modeling and prognosis previously reviewed in thispaper it has no major impact on the maintenance decision-making For this reason we do not discuss this issue againhere interested readers are referred to Jardine et al [30]which summarized many works in this regard
Depending on the budget constraint andor technologiesused condition monitoring can be either continuous orintermittent (periodic or aperiodic) of which the latter isalso known as interval inspection The case of CBM withintermittent condition monitoring has been studied exten-sively in literature primarily due to its wide implementationin practice The important decision variables are the controllimitcritical level and inspection interval optimal criticallevel and inspection intervals are found based on criteriathat are mostly cost-based [114ndash117] In some works criticallevels are assumed to be predetermined by expert knowledgeand only optimal inspection strategies are studied [118ndash120]To provide more refined maintenance policies to minimizecost some researchers consider multiple control limits Forexample Castanier et al [121] used different thresholds forinspection scheduling partial repair preventive replacementand restarting for repairable systems With the developmentof sensing and information technology continuous conditionmonitoring has become available at reasonable costs inmany applications [122] Comparingwith interval inspection
Mathematical Problems in Engineering 9
Siglab analyzer
Gearbox system
Accelerometers
Laptop
(a)
Timing belt
Speed controller
Motor
Tested gear
Gearbox
Shaft 1
Shaft 2
Shaft 3
Brake controller
Brake
1
2 3
4
(b)
Figure 3 Experiment setup
Figure 4 Different crack levels in the gears
the research in this area is relatively new but has becomeincreasingly popular The fundamental difference of CBMwith continuous monitoring is that the real-time systeminformation allows maintenance decisions to be made at anytime and hence the greater chance to optimize the set criteria[123ndash128]
While majority of the existing work deals only with singlecomponent some researchers extend CBM to maintenancedecision-making for multiple components in the systemTherationale of developing multicomponent maintenance policyis that there are economic dependencies among multiplecomponents [129 130] High fixed maintenance cost suchas sending a maintenance team to a remote wind farmcan bemitigated by replacingrepairingmultiple componentssimultaneously [123 126 131 132]
3 Illustrative Case Studies
In this section we use three examples to illustrate theimplementation of PHM
31 Fault Diagnosis on Gear Crack Development Gearboxesare one of the most commonly used parts in machinery
Diagnosis of gear faults is crucial for preventing system mal-function In this example we demonstrate the fault diagnosisand classification for identifying different development stagesof cracks on gears in gearboxes [25 133] A gearbox test rigis shown in Figure 3 where gear 3 is the tested gear withpotential cracks Three different types of gears are tested (1)0 crack level (2) 25 crack level (3) 50 crack level asshown in Figure 4 The vibration signal is measured usingaccelerometers under various working conditions 3 levels ofload from the magnetic brake (no load half the maximumload and maximum load) and 4 levels of motor speed(1200 rpm 1400 rpm 1600 rpm and 1800 rpm) Three sets ofdata sample are obtained under each combination of the twofactors Hence we obtain 36 data samples for each crack levelThe data are then used for gear crack detection and crack levelclassification
All the ten time-domain features listed in Table 1 arecalculated as potential candidate features Six features peakmean root mean square (RMS) skewness kurtosis andshape factor are selected by ANOVA and TFSWT Afterfeature selection three methods are applied to classifyingthe three levels of gear cracks namely multinomial logitmodel (MLM) cumulative link model (CLM) and weighted
10 Mathematical Problems in Engineering
119896 nearest neighbor (WKNN) Interested readers are referredto Lei and Zuo [25] andHai et al [133] for technical details Toassess the performance of themethods a leave-one-out cross-validation approach is used the classification accuracies forMLM CLM and WKNN are 981 944 and near 100respectively The test results demonstrate that the proposedmethods can accurately identify the crack development ofgears which is very beneficial for early warning of potentialgearbox malfunction
32 Predicting RUL of Rotational Bearings In this section wereturn to the motivating example in Section 1 which aims topredict the RULof bearings As the purpose of PHM ismainlyto provide individualized prediction results it is necessary toadapt the model to specific characteristics of each bearingrevealed through past observations A natural choice is to useBayesian framework to integrate the prior information fromother bearings with observations of the in-service unit Byselecting the conjugate prior distributions model updatingcan be efficiently done
119875 (120573 | 1198841 1198842 119884119899) prop 119875 (1198841 1198842 119884119899 | 120573) sdot 120587 (120573) (7)
where 120573 is the model parameters 119884119894 is the observed vibrationmagnitude at time 119905119894 119875(1198841 1198842 119884119899 | 120573) is the likelihoodfunction given the parameter 120587(120573) is the prior distributioncarrying information from historical bearing samples and119875(120573 | 1198841 1198842 119884119899) is the posterior distribution of 120573 inte-grating the prior information and current observations Asnew observations are collected model updating can be donerepeatedly and correspondingly the predicted failure timewill also be updated
119875 (119884119896 | 1198841 1198842 119884119899)
= int119875 (120573 | 1198841 1198842 119884119899) sdot 119875 (119884119896 | 120573) 119889120573
(8)
where 119875(119884119896 | 1198841 1198842 119884119899) is the prediction of the vibrationmagnitude at some future time 119905119896 As 119899 increases the predic-tion will be more and more accurate with smaller varianceas demonstrated in Figure 5
In this example 25 bearings are tested and Figure 6 showsthe prediction interval of the failure time The 119909-axis is theindex of the bearings used in the experiments The circleswith the same 119909-axis value represent the 005 05 and 095quantiles of the failure time and the cross shows the truefailure timeThe results show that the prediction based on theabove algorithm is acceptably accurate In certain cases theprediction interval is very tight providing very informativewarnings on the potential failures
33 Predicting RUL of Lithium-Ion Batteries Using ParticleFilter Lithium-ion batteries are widely used in consumerelectronics as their sole power sources The importance ofbatteries to those devices is arguably critical As battery agesits capacity degrades and is widely used as an indicator of thebatteryrsquos health As a common rule a battery is consideredincapable of functioning as intended when its capacity dropsto 80 of its initial value In this example a particle filtering
0 100 200 300 400 5000
0005
001
0015
002
0025
003
0035
Residual life
Prob
abili
ty d
istrib
utio
n
70 failure time80 failure time
Figure 5 Predicted distribution of residual life at different observa-tion times
0 5 10 15 20 250
200
400
600
800
1000
1200
1400
1600
Bearing index
Failu
re ti
me
Figure 6 Prediction interval and the true values of failure timefor each bearing (triangle means last observed life time of bearingswhich have not yet failed)
(PF) based prognostic algorithm is used to predict RUL oflithium-ion batteries based on accelerating testing data of sixbatteries [134]
In the experiment batteries were tested with full chargingand discharging cycles under the constant-currentconstant-voltage mode The discharge rate was set to 1C which meantthe battery would be fully discharged in one hourThe experi-ment was conducted under room temperature and dischargecapacity was calculated based on integrating current overtime for each cycle Figure 7 shows the capacity degradationprocess of one testing battery
As capacity is used as the default health indicator ofbatteries there is no feature selection needed We proceed
Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
119894 isin Φ is used to link 119884119899 119899 ⩾ 0 and 119885119899 119899 ⩾ 0 As such theRUL at time instant 119899 can be defined as 119879 = inf119905 119885119899+119905 =119873 | 119885119899 = 119873 119884119895 0 le 119895 le 119899Themodel is preferred when onlyindirect observations are available [90]
233 Filtering-Based Models Similar as the HMM theKalman filtering model does not use the CM directly as thetrue degradation signal It assumes that the true state of thedegradation is unobservable but related with CM data TheKalman filtering model considers the unobserved condition119909119905 and the observed CM data 119910119905 such that 119909119905 = 120572119909119905minus1 + 120598119905
and 119910119905 = 120573119909119905 + 120578119905 where 120598119905 and 120578119905 are Gaussian noises and120572 and 120573 are the parameters of the state space model TheKalman filtering model takes advantage of all historical dataunlike many methods that only depend on the last CMstatus However the linear assumption and Gaussian noiseassumption limit its applications Efforts have been made toovercome these problems (eg [91 92])
234 Regression Based Model Methods in this categorymostly involve building parametric evolution path (linear ornonlinear) of CM data with random effects Most existingmethods in RUL estimation assume that products of thesame type or from the same batch have exactly the samefailure characteristics probabilistically While the populationbehavior can provide some reference they cannot accuratelyreflect the health evolution for each individual item sinceindividual products often experience different usage patternsdistinct environments or evendifferent quality due to processvariations Consequently it is crucial to adapt to the healthevolutions of each individual product rather than perceivedgroup averages for better reliability prediction In recentyears some methods have been proposed to incorporate thepopulation information with observations from individualitems to get better RUL estimation
Meeker and Escobar [93] give an example of a lineardegradation with Log-normal rate
119883 (119905) = 1205730 + 1205731119905 (1)
where 1205730 is fixed 1205731 sim LOGNOR(120583 120590) and 119863 is thepredetermined threshold thus the distribution of failure timewill be
119865 (119905 1205730 120583 120590) = 119875 (1205730 + 1205731119905 gt 119863) = 119875(1205731 gt119863 minus 1205730
119905
)
= Φnor (log (119905) minus [log (119863 minus 1205730) minus 120583]
120590
)
119905 gt 0
(2)
Lu andMeeker [94] proposed several random coefficientsmodel to describe individual health degradation by consider-ing both population trend and individual unit characteristicsthrough fixed and random effects respectively
119910119894119895 = 119891 (119905119895 120601 120579119894) + 120576119894119895 (3)
where 119910119894119895 is the degradation signal of item 119894 at time 119905119895 120601 is theparameters for the fixed effects and 120579119894 is the parameters of
randomeffects for item 119894 Based on (3) the distribution of fail-ure time defined as119879 = inf119905 119891(119905 120601 120579119894)+120598119894119895 gt 119863where119863 isthe predetermined threshold can be computed analytically ornumerically Different examples were illustrated for differentdegradation models and distributions of random effects 120579119894 inthe paper K Yang andG Yang [95] extended the idea and uti-lized both the life time data of failed devices and degradationinformation from unfailed ones to improve the model esti-mation Along this line with applications in a variety of fieldsother representative works include Yang and Jeang [96]Tseng et al [97] and Goode et al [98] Although in theseresults the individual-to-individual variation has been con-sidered using random effects the data from individual itemare only used to assess the variability among items in thepopulation and fit the random effects distribution 119866120579 Theprediction of failure time is still population-wise althoughit considers the variability within the population In certainsense the prediction interval is inflated to cover differentdegradation paths
Gebraeel and his colleagues [17 18 99] instead developeda Bayesian framework to model the degradation signals andpredict the residual life distribution Different from previousworks the residual life prediction is ldquocustomizedrdquo based onthe data from each individual For example the degradationsignal can be modeled by
119871 (119905119894) = 120579 + 120573 sdot 119905119894 + 120576 (119905119894) (4)
where 120579 and 120573 are random variables following certain dis-tribution and 120576 is measurement error (independent normalor Brownian motion) From historical data the joint distri-bution of 120579 and 120573 denoted by 119875(120579 120573) can be estimated asprior knowledge regarding the population characteristics ofdegradation For each operating new individual the vibrationsignals are collected and used to update the degradationmodel using Bayesian method
119875 120579 120573 | 119871 (1199051) 119871 (1199052) 119871 (119905119896)
prop 119875 119871 (1199051) 119871 (1199052) 119871 (119905119896) | 120579 120573 sdot 119875 (120579 120573)
(5)
where the left hand side of (5) represents the posteriordistribution of parameters of the degradationmodel (4) givenobservations up to time 119905119896 the first term on the right handside corresponds to the likelihood function of the observeddata implied by (4) with fixed 120579 and 120573 and the last term is the(estimated) prior distribution of themodel parameters withinthe population In other words the degradation model foreach individual is self-updating when new observations areavailable It is expected that the predicted failure time basedon the posterior degradation model will be more accurate
Due to its simplicity and natural integration Bayesianframework has continuously been investigated in the liter-ature to provide more accurate degradation modeling andfailure prognostics For example Xu and Zhou [100] studiedthemodeling and prognostics using general nonlinear degra-dation paths where the Bayesian basedmodel estimation andMonte Carlo based failure time prediction were presentedChen and Tsui [101] extended this to a two-phase modelwhich allows for a change point of the linear degradation
8 Mathematical Problems in Engineering
Thismodel captures the deterioration of the bearing indicatedby the vibration signal Other references on this topic areGebraeel and Lawley [102] and Si et al [82 83]
235 Proportional Hazard Model Proportional hazardmodel [103] has been extensively studied in various areasProportional hazard model with time-dependent variable(s)is able to incorporate both event data and CM data whichcan be particularly useful in cases of uncertain failurethresholds or hard failures [104ndash106]Themodel assumes thefollowing form for hazard rate
ℎ (119905) = ℎ0 (119905) exp (120574z (119905)) (6)where ℎ0(119905) is the baseline hazard rate 120574 is a vector of coef-ficients and z(119905) contains time-dependent variables ℎ0(119905)can be either parametric (eg Weibull) or nonparametricand model parameters can be estimated by the maximumlikelihood method In this model the condition monitoringdata are viewed as time-dependent covariates in z(119905) Systemfailure distribution can be calculated based on (6)
236 Threshold Regression Model The parent process 119883(119905)and boundary set 119861 of the FHT model will both generallyhave parameters 119911 that depend on covariates that vary acrossindividuals 119892120579(119911119894) = 119911119894120573 [107] Cox Proportional Hazardregression is for most purposes a special case of Thresh-old Regression [108] Any family of proportional hazardfunctions can be generated by varying the time scales orboundaries of a TR model subject to only mild regulatoryconditions There is a connection between the shape of thehazard function (HF) and the type of failure mode (cause offailure) For example an increasingHF corresponds to agingwear-out and a decreasing hazard function generally suggestsa mixture of defective or other weak units leading to infantmortality
24 Condition BasedMaintenance Maintenance is defined asa set of activities or tasks used to restore an item to a state inwhich it can perform its designated functions Maintenancestrategies can be broadly classified into Corrective Main-tenance and Preventive Maintenance strategies [109 110]In corrective maintenance maintenance activities are onlycarried out after the failure happens and hence should only beused for noncritical systems On the other hand preventivemaintenance tries to prevent the failure from happening byusing either predetermined maintenance such as time-basedmaintenance or condition-based maintenance (CBM) Anexample of predetermined maintenance is the commonlysuggested practice of changing engine oil every 3000miles orthreemonths (whichever comes first) regardless of the actualoil condition In recent decades some companies such as GMhave developed oil life monitoring systems which allows carowners to change oil only when necessary (eg [111]) Suchsystem is an excellent example of CBM implementation Inrecent years CBM has become the most modern techniquediscussed in the literature and falls well within the frameworkof PHM
CBM is a maintenance program that makes maintenancedecisions based on the information collected about the
underlying system allowing maintenance activities to beperformed only when necessary The dominating objectiveof CBM in literature is to minimize the cost for maintenanceactivities It is worth pointing out that in some literature theterm ldquocondition based maintenancerdquo has a broader definitionthat also involves the preceding steps of data manipulationdiagnosis and prognosis (eg [30]) In this section werestrict our discussion to maintenance decision-making inCBM
The underpinning assumption of the PHM frameworkis that systems are subject to stochastic deteriorations Thenatural choice of maintenance strategy for stochastic deterio-rating systems is called ldquocontrol-limit policyrdquo or ldquofailure limitpolicyrdquo [110 112] wheremaintenance activities are conductedwhen the system deterioration reaches a certain level Undersuch policy prognostic results on system deterioration canbe used for maintenance decision-making The control-limitpolicy has been shown to be the optimal replacement rulefor systems with increasing deteriorations when consideringthe average long-run cost per unit time [113] Existing workon CBM can be classified in several ways depending on thenature of the system and the assumptions they make whichare (1) whether the system health condition is completelyobservable or partially observable (2) whether the conditionmonitoring is continuous or intermittent (3) whether themaintenance program deals with single component or mul-tiple components Note that these are not mutually exclusiveand a single work usually falls into multiple categories Belowwe discuss these topics in more detail
In condition monitoring the system health conditioncan be either completely or partially observedidentifiedThesystem health information obtained in the former case iscalled direct information while that in the latter case is calledindirect information While it is a critical issue for the degra-dation modeling and prognosis previously reviewed in thispaper it has no major impact on the maintenance decision-making For this reason we do not discuss this issue againhere interested readers are referred to Jardine et al [30]which summarized many works in this regard
Depending on the budget constraint andor technologiesused condition monitoring can be either continuous orintermittent (periodic or aperiodic) of which the latter isalso known as interval inspection The case of CBM withintermittent condition monitoring has been studied exten-sively in literature primarily due to its wide implementationin practice The important decision variables are the controllimitcritical level and inspection interval optimal criticallevel and inspection intervals are found based on criteriathat are mostly cost-based [114ndash117] In some works criticallevels are assumed to be predetermined by expert knowledgeand only optimal inspection strategies are studied [118ndash120]To provide more refined maintenance policies to minimizecost some researchers consider multiple control limits Forexample Castanier et al [121] used different thresholds forinspection scheduling partial repair preventive replacementand restarting for repairable systems With the developmentof sensing and information technology continuous conditionmonitoring has become available at reasonable costs inmany applications [122] Comparingwith interval inspection
Mathematical Problems in Engineering 9
Siglab analyzer
Gearbox system
Accelerometers
Laptop
(a)
Timing belt
Speed controller
Motor
Tested gear
Gearbox
Shaft 1
Shaft 2
Shaft 3
Brake controller
Brake
1
2 3
4
(b)
Figure 3 Experiment setup
Figure 4 Different crack levels in the gears
the research in this area is relatively new but has becomeincreasingly popular The fundamental difference of CBMwith continuous monitoring is that the real-time systeminformation allows maintenance decisions to be made at anytime and hence the greater chance to optimize the set criteria[123ndash128]
While majority of the existing work deals only with singlecomponent some researchers extend CBM to maintenancedecision-making for multiple components in the systemTherationale of developing multicomponent maintenance policyis that there are economic dependencies among multiplecomponents [129 130] High fixed maintenance cost suchas sending a maintenance team to a remote wind farmcan bemitigated by replacingrepairingmultiple componentssimultaneously [123 126 131 132]
3 Illustrative Case Studies
In this section we use three examples to illustrate theimplementation of PHM
31 Fault Diagnosis on Gear Crack Development Gearboxesare one of the most commonly used parts in machinery
Diagnosis of gear faults is crucial for preventing system mal-function In this example we demonstrate the fault diagnosisand classification for identifying different development stagesof cracks on gears in gearboxes [25 133] A gearbox test rigis shown in Figure 3 where gear 3 is the tested gear withpotential cracks Three different types of gears are tested (1)0 crack level (2) 25 crack level (3) 50 crack level asshown in Figure 4 The vibration signal is measured usingaccelerometers under various working conditions 3 levels ofload from the magnetic brake (no load half the maximumload and maximum load) and 4 levels of motor speed(1200 rpm 1400 rpm 1600 rpm and 1800 rpm) Three sets ofdata sample are obtained under each combination of the twofactors Hence we obtain 36 data samples for each crack levelThe data are then used for gear crack detection and crack levelclassification
All the ten time-domain features listed in Table 1 arecalculated as potential candidate features Six features peakmean root mean square (RMS) skewness kurtosis andshape factor are selected by ANOVA and TFSWT Afterfeature selection three methods are applied to classifyingthe three levels of gear cracks namely multinomial logitmodel (MLM) cumulative link model (CLM) and weighted
10 Mathematical Problems in Engineering
119896 nearest neighbor (WKNN) Interested readers are referredto Lei and Zuo [25] andHai et al [133] for technical details Toassess the performance of themethods a leave-one-out cross-validation approach is used the classification accuracies forMLM CLM and WKNN are 981 944 and near 100respectively The test results demonstrate that the proposedmethods can accurately identify the crack development ofgears which is very beneficial for early warning of potentialgearbox malfunction
32 Predicting RUL of Rotational Bearings In this section wereturn to the motivating example in Section 1 which aims topredict the RULof bearings As the purpose of PHM ismainlyto provide individualized prediction results it is necessary toadapt the model to specific characteristics of each bearingrevealed through past observations A natural choice is to useBayesian framework to integrate the prior information fromother bearings with observations of the in-service unit Byselecting the conjugate prior distributions model updatingcan be efficiently done
119875 (120573 | 1198841 1198842 119884119899) prop 119875 (1198841 1198842 119884119899 | 120573) sdot 120587 (120573) (7)
where 120573 is the model parameters 119884119894 is the observed vibrationmagnitude at time 119905119894 119875(1198841 1198842 119884119899 | 120573) is the likelihoodfunction given the parameter 120587(120573) is the prior distributioncarrying information from historical bearing samples and119875(120573 | 1198841 1198842 119884119899) is the posterior distribution of 120573 inte-grating the prior information and current observations Asnew observations are collected model updating can be donerepeatedly and correspondingly the predicted failure timewill also be updated
119875 (119884119896 | 1198841 1198842 119884119899)
= int119875 (120573 | 1198841 1198842 119884119899) sdot 119875 (119884119896 | 120573) 119889120573
(8)
where 119875(119884119896 | 1198841 1198842 119884119899) is the prediction of the vibrationmagnitude at some future time 119905119896 As 119899 increases the predic-tion will be more and more accurate with smaller varianceas demonstrated in Figure 5
In this example 25 bearings are tested and Figure 6 showsthe prediction interval of the failure time The 119909-axis is theindex of the bearings used in the experiments The circleswith the same 119909-axis value represent the 005 05 and 095quantiles of the failure time and the cross shows the truefailure timeThe results show that the prediction based on theabove algorithm is acceptably accurate In certain cases theprediction interval is very tight providing very informativewarnings on the potential failures
33 Predicting RUL of Lithium-Ion Batteries Using ParticleFilter Lithium-ion batteries are widely used in consumerelectronics as their sole power sources The importance ofbatteries to those devices is arguably critical As battery agesits capacity degrades and is widely used as an indicator of thebatteryrsquos health As a common rule a battery is consideredincapable of functioning as intended when its capacity dropsto 80 of its initial value In this example a particle filtering
0 100 200 300 400 5000
0005
001
0015
002
0025
003
0035
Residual life
Prob
abili
ty d
istrib
utio
n
70 failure time80 failure time
Figure 5 Predicted distribution of residual life at different observa-tion times
0 5 10 15 20 250
200
400
600
800
1000
1200
1400
1600
Bearing index
Failu
re ti
me
Figure 6 Prediction interval and the true values of failure timefor each bearing (triangle means last observed life time of bearingswhich have not yet failed)
(PF) based prognostic algorithm is used to predict RUL oflithium-ion batteries based on accelerating testing data of sixbatteries [134]
In the experiment batteries were tested with full chargingand discharging cycles under the constant-currentconstant-voltage mode The discharge rate was set to 1C which meantthe battery would be fully discharged in one hourThe experi-ment was conducted under room temperature and dischargecapacity was calculated based on integrating current overtime for each cycle Figure 7 shows the capacity degradationprocess of one testing battery
As capacity is used as the default health indicator ofbatteries there is no feature selection needed We proceed
Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Thismodel captures the deterioration of the bearing indicatedby the vibration signal Other references on this topic areGebraeel and Lawley [102] and Si et al [82 83]
235 Proportional Hazard Model Proportional hazardmodel [103] has been extensively studied in various areasProportional hazard model with time-dependent variable(s)is able to incorporate both event data and CM data whichcan be particularly useful in cases of uncertain failurethresholds or hard failures [104ndash106]Themodel assumes thefollowing form for hazard rate
ℎ (119905) = ℎ0 (119905) exp (120574z (119905)) (6)where ℎ0(119905) is the baseline hazard rate 120574 is a vector of coef-ficients and z(119905) contains time-dependent variables ℎ0(119905)can be either parametric (eg Weibull) or nonparametricand model parameters can be estimated by the maximumlikelihood method In this model the condition monitoringdata are viewed as time-dependent covariates in z(119905) Systemfailure distribution can be calculated based on (6)
236 Threshold Regression Model The parent process 119883(119905)and boundary set 119861 of the FHT model will both generallyhave parameters 119911 that depend on covariates that vary acrossindividuals 119892120579(119911119894) = 119911119894120573 [107] Cox Proportional Hazardregression is for most purposes a special case of Thresh-old Regression [108] Any family of proportional hazardfunctions can be generated by varying the time scales orboundaries of a TR model subject to only mild regulatoryconditions There is a connection between the shape of thehazard function (HF) and the type of failure mode (cause offailure) For example an increasingHF corresponds to agingwear-out and a decreasing hazard function generally suggestsa mixture of defective or other weak units leading to infantmortality
24 Condition BasedMaintenance Maintenance is defined asa set of activities or tasks used to restore an item to a state inwhich it can perform its designated functions Maintenancestrategies can be broadly classified into Corrective Main-tenance and Preventive Maintenance strategies [109 110]In corrective maintenance maintenance activities are onlycarried out after the failure happens and hence should only beused for noncritical systems On the other hand preventivemaintenance tries to prevent the failure from happening byusing either predetermined maintenance such as time-basedmaintenance or condition-based maintenance (CBM) Anexample of predetermined maintenance is the commonlysuggested practice of changing engine oil every 3000miles orthreemonths (whichever comes first) regardless of the actualoil condition In recent decades some companies such as GMhave developed oil life monitoring systems which allows carowners to change oil only when necessary (eg [111]) Suchsystem is an excellent example of CBM implementation Inrecent years CBM has become the most modern techniquediscussed in the literature and falls well within the frameworkof PHM
CBM is a maintenance program that makes maintenancedecisions based on the information collected about the
underlying system allowing maintenance activities to beperformed only when necessary The dominating objectiveof CBM in literature is to minimize the cost for maintenanceactivities It is worth pointing out that in some literature theterm ldquocondition based maintenancerdquo has a broader definitionthat also involves the preceding steps of data manipulationdiagnosis and prognosis (eg [30]) In this section werestrict our discussion to maintenance decision-making inCBM
The underpinning assumption of the PHM frameworkis that systems are subject to stochastic deteriorations Thenatural choice of maintenance strategy for stochastic deterio-rating systems is called ldquocontrol-limit policyrdquo or ldquofailure limitpolicyrdquo [110 112] wheremaintenance activities are conductedwhen the system deterioration reaches a certain level Undersuch policy prognostic results on system deterioration canbe used for maintenance decision-making The control-limitpolicy has been shown to be the optimal replacement rulefor systems with increasing deteriorations when consideringthe average long-run cost per unit time [113] Existing workon CBM can be classified in several ways depending on thenature of the system and the assumptions they make whichare (1) whether the system health condition is completelyobservable or partially observable (2) whether the conditionmonitoring is continuous or intermittent (3) whether themaintenance program deals with single component or mul-tiple components Note that these are not mutually exclusiveand a single work usually falls into multiple categories Belowwe discuss these topics in more detail
In condition monitoring the system health conditioncan be either completely or partially observedidentifiedThesystem health information obtained in the former case iscalled direct information while that in the latter case is calledindirect information While it is a critical issue for the degra-dation modeling and prognosis previously reviewed in thispaper it has no major impact on the maintenance decision-making For this reason we do not discuss this issue againhere interested readers are referred to Jardine et al [30]which summarized many works in this regard
Depending on the budget constraint andor technologiesused condition monitoring can be either continuous orintermittent (periodic or aperiodic) of which the latter isalso known as interval inspection The case of CBM withintermittent condition monitoring has been studied exten-sively in literature primarily due to its wide implementationin practice The important decision variables are the controllimitcritical level and inspection interval optimal criticallevel and inspection intervals are found based on criteriathat are mostly cost-based [114ndash117] In some works criticallevels are assumed to be predetermined by expert knowledgeand only optimal inspection strategies are studied [118ndash120]To provide more refined maintenance policies to minimizecost some researchers consider multiple control limits Forexample Castanier et al [121] used different thresholds forinspection scheduling partial repair preventive replacementand restarting for repairable systems With the developmentof sensing and information technology continuous conditionmonitoring has become available at reasonable costs inmany applications [122] Comparingwith interval inspection
Mathematical Problems in Engineering 9
Siglab analyzer
Gearbox system
Accelerometers
Laptop
(a)
Timing belt
Speed controller
Motor
Tested gear
Gearbox
Shaft 1
Shaft 2
Shaft 3
Brake controller
Brake
1
2 3
4
(b)
Figure 3 Experiment setup
Figure 4 Different crack levels in the gears
the research in this area is relatively new but has becomeincreasingly popular The fundamental difference of CBMwith continuous monitoring is that the real-time systeminformation allows maintenance decisions to be made at anytime and hence the greater chance to optimize the set criteria[123ndash128]
While majority of the existing work deals only with singlecomponent some researchers extend CBM to maintenancedecision-making for multiple components in the systemTherationale of developing multicomponent maintenance policyis that there are economic dependencies among multiplecomponents [129 130] High fixed maintenance cost suchas sending a maintenance team to a remote wind farmcan bemitigated by replacingrepairingmultiple componentssimultaneously [123 126 131 132]
3 Illustrative Case Studies
In this section we use three examples to illustrate theimplementation of PHM
31 Fault Diagnosis on Gear Crack Development Gearboxesare one of the most commonly used parts in machinery
Diagnosis of gear faults is crucial for preventing system mal-function In this example we demonstrate the fault diagnosisand classification for identifying different development stagesof cracks on gears in gearboxes [25 133] A gearbox test rigis shown in Figure 3 where gear 3 is the tested gear withpotential cracks Three different types of gears are tested (1)0 crack level (2) 25 crack level (3) 50 crack level asshown in Figure 4 The vibration signal is measured usingaccelerometers under various working conditions 3 levels ofload from the magnetic brake (no load half the maximumload and maximum load) and 4 levels of motor speed(1200 rpm 1400 rpm 1600 rpm and 1800 rpm) Three sets ofdata sample are obtained under each combination of the twofactors Hence we obtain 36 data samples for each crack levelThe data are then used for gear crack detection and crack levelclassification
All the ten time-domain features listed in Table 1 arecalculated as potential candidate features Six features peakmean root mean square (RMS) skewness kurtosis andshape factor are selected by ANOVA and TFSWT Afterfeature selection three methods are applied to classifyingthe three levels of gear cracks namely multinomial logitmodel (MLM) cumulative link model (CLM) and weighted
10 Mathematical Problems in Engineering
119896 nearest neighbor (WKNN) Interested readers are referredto Lei and Zuo [25] andHai et al [133] for technical details Toassess the performance of themethods a leave-one-out cross-validation approach is used the classification accuracies forMLM CLM and WKNN are 981 944 and near 100respectively The test results demonstrate that the proposedmethods can accurately identify the crack development ofgears which is very beneficial for early warning of potentialgearbox malfunction
32 Predicting RUL of Rotational Bearings In this section wereturn to the motivating example in Section 1 which aims topredict the RULof bearings As the purpose of PHM ismainlyto provide individualized prediction results it is necessary toadapt the model to specific characteristics of each bearingrevealed through past observations A natural choice is to useBayesian framework to integrate the prior information fromother bearings with observations of the in-service unit Byselecting the conjugate prior distributions model updatingcan be efficiently done
119875 (120573 | 1198841 1198842 119884119899) prop 119875 (1198841 1198842 119884119899 | 120573) sdot 120587 (120573) (7)
where 120573 is the model parameters 119884119894 is the observed vibrationmagnitude at time 119905119894 119875(1198841 1198842 119884119899 | 120573) is the likelihoodfunction given the parameter 120587(120573) is the prior distributioncarrying information from historical bearing samples and119875(120573 | 1198841 1198842 119884119899) is the posterior distribution of 120573 inte-grating the prior information and current observations Asnew observations are collected model updating can be donerepeatedly and correspondingly the predicted failure timewill also be updated
119875 (119884119896 | 1198841 1198842 119884119899)
= int119875 (120573 | 1198841 1198842 119884119899) sdot 119875 (119884119896 | 120573) 119889120573
(8)
where 119875(119884119896 | 1198841 1198842 119884119899) is the prediction of the vibrationmagnitude at some future time 119905119896 As 119899 increases the predic-tion will be more and more accurate with smaller varianceas demonstrated in Figure 5
In this example 25 bearings are tested and Figure 6 showsthe prediction interval of the failure time The 119909-axis is theindex of the bearings used in the experiments The circleswith the same 119909-axis value represent the 005 05 and 095quantiles of the failure time and the cross shows the truefailure timeThe results show that the prediction based on theabove algorithm is acceptably accurate In certain cases theprediction interval is very tight providing very informativewarnings on the potential failures
33 Predicting RUL of Lithium-Ion Batteries Using ParticleFilter Lithium-ion batteries are widely used in consumerelectronics as their sole power sources The importance ofbatteries to those devices is arguably critical As battery agesits capacity degrades and is widely used as an indicator of thebatteryrsquos health As a common rule a battery is consideredincapable of functioning as intended when its capacity dropsto 80 of its initial value In this example a particle filtering
0 100 200 300 400 5000
0005
001
0015
002
0025
003
0035
Residual life
Prob
abili
ty d
istrib
utio
n
70 failure time80 failure time
Figure 5 Predicted distribution of residual life at different observa-tion times
0 5 10 15 20 250
200
400
600
800
1000
1200
1400
1600
Bearing index
Failu
re ti
me
Figure 6 Prediction interval and the true values of failure timefor each bearing (triangle means last observed life time of bearingswhich have not yet failed)
(PF) based prognostic algorithm is used to predict RUL oflithium-ion batteries based on accelerating testing data of sixbatteries [134]
In the experiment batteries were tested with full chargingand discharging cycles under the constant-currentconstant-voltage mode The discharge rate was set to 1C which meantthe battery would be fully discharged in one hourThe experi-ment was conducted under room temperature and dischargecapacity was calculated based on integrating current overtime for each cycle Figure 7 shows the capacity degradationprocess of one testing battery
As capacity is used as the default health indicator ofbatteries there is no feature selection needed We proceed
Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
Siglab analyzer
Gearbox system
Accelerometers
Laptop
(a)
Timing belt
Speed controller
Motor
Tested gear
Gearbox
Shaft 1
Shaft 2
Shaft 3
Brake controller
Brake
1
2 3
4
(b)
Figure 3 Experiment setup
Figure 4 Different crack levels in the gears
the research in this area is relatively new but has becomeincreasingly popular The fundamental difference of CBMwith continuous monitoring is that the real-time systeminformation allows maintenance decisions to be made at anytime and hence the greater chance to optimize the set criteria[123ndash128]
While majority of the existing work deals only with singlecomponent some researchers extend CBM to maintenancedecision-making for multiple components in the systemTherationale of developing multicomponent maintenance policyis that there are economic dependencies among multiplecomponents [129 130] High fixed maintenance cost suchas sending a maintenance team to a remote wind farmcan bemitigated by replacingrepairingmultiple componentssimultaneously [123 126 131 132]
3 Illustrative Case Studies
In this section we use three examples to illustrate theimplementation of PHM
31 Fault Diagnosis on Gear Crack Development Gearboxesare one of the most commonly used parts in machinery
Diagnosis of gear faults is crucial for preventing system mal-function In this example we demonstrate the fault diagnosisand classification for identifying different development stagesof cracks on gears in gearboxes [25 133] A gearbox test rigis shown in Figure 3 where gear 3 is the tested gear withpotential cracks Three different types of gears are tested (1)0 crack level (2) 25 crack level (3) 50 crack level asshown in Figure 4 The vibration signal is measured usingaccelerometers under various working conditions 3 levels ofload from the magnetic brake (no load half the maximumload and maximum load) and 4 levels of motor speed(1200 rpm 1400 rpm 1600 rpm and 1800 rpm) Three sets ofdata sample are obtained under each combination of the twofactors Hence we obtain 36 data samples for each crack levelThe data are then used for gear crack detection and crack levelclassification
All the ten time-domain features listed in Table 1 arecalculated as potential candidate features Six features peakmean root mean square (RMS) skewness kurtosis andshape factor are selected by ANOVA and TFSWT Afterfeature selection three methods are applied to classifyingthe three levels of gear cracks namely multinomial logitmodel (MLM) cumulative link model (CLM) and weighted
10 Mathematical Problems in Engineering
119896 nearest neighbor (WKNN) Interested readers are referredto Lei and Zuo [25] andHai et al [133] for technical details Toassess the performance of themethods a leave-one-out cross-validation approach is used the classification accuracies forMLM CLM and WKNN are 981 944 and near 100respectively The test results demonstrate that the proposedmethods can accurately identify the crack development ofgears which is very beneficial for early warning of potentialgearbox malfunction
32 Predicting RUL of Rotational Bearings In this section wereturn to the motivating example in Section 1 which aims topredict the RULof bearings As the purpose of PHM ismainlyto provide individualized prediction results it is necessary toadapt the model to specific characteristics of each bearingrevealed through past observations A natural choice is to useBayesian framework to integrate the prior information fromother bearings with observations of the in-service unit Byselecting the conjugate prior distributions model updatingcan be efficiently done
119875 (120573 | 1198841 1198842 119884119899) prop 119875 (1198841 1198842 119884119899 | 120573) sdot 120587 (120573) (7)
where 120573 is the model parameters 119884119894 is the observed vibrationmagnitude at time 119905119894 119875(1198841 1198842 119884119899 | 120573) is the likelihoodfunction given the parameter 120587(120573) is the prior distributioncarrying information from historical bearing samples and119875(120573 | 1198841 1198842 119884119899) is the posterior distribution of 120573 inte-grating the prior information and current observations Asnew observations are collected model updating can be donerepeatedly and correspondingly the predicted failure timewill also be updated
119875 (119884119896 | 1198841 1198842 119884119899)
= int119875 (120573 | 1198841 1198842 119884119899) sdot 119875 (119884119896 | 120573) 119889120573
(8)
where 119875(119884119896 | 1198841 1198842 119884119899) is the prediction of the vibrationmagnitude at some future time 119905119896 As 119899 increases the predic-tion will be more and more accurate with smaller varianceas demonstrated in Figure 5
In this example 25 bearings are tested and Figure 6 showsthe prediction interval of the failure time The 119909-axis is theindex of the bearings used in the experiments The circleswith the same 119909-axis value represent the 005 05 and 095quantiles of the failure time and the cross shows the truefailure timeThe results show that the prediction based on theabove algorithm is acceptably accurate In certain cases theprediction interval is very tight providing very informativewarnings on the potential failures
33 Predicting RUL of Lithium-Ion Batteries Using ParticleFilter Lithium-ion batteries are widely used in consumerelectronics as their sole power sources The importance ofbatteries to those devices is arguably critical As battery agesits capacity degrades and is widely used as an indicator of thebatteryrsquos health As a common rule a battery is consideredincapable of functioning as intended when its capacity dropsto 80 of its initial value In this example a particle filtering
0 100 200 300 400 5000
0005
001
0015
002
0025
003
0035
Residual life
Prob
abili
ty d
istrib
utio
n
70 failure time80 failure time
Figure 5 Predicted distribution of residual life at different observa-tion times
0 5 10 15 20 250
200
400
600
800
1000
1200
1400
1600
Bearing index
Failu
re ti
me
Figure 6 Prediction interval and the true values of failure timefor each bearing (triangle means last observed life time of bearingswhich have not yet failed)
(PF) based prognostic algorithm is used to predict RUL oflithium-ion batteries based on accelerating testing data of sixbatteries [134]
In the experiment batteries were tested with full chargingand discharging cycles under the constant-currentconstant-voltage mode The discharge rate was set to 1C which meantthe battery would be fully discharged in one hourThe experi-ment was conducted under room temperature and dischargecapacity was calculated based on integrating current overtime for each cycle Figure 7 shows the capacity degradationprocess of one testing battery
As capacity is used as the default health indicator ofbatteries there is no feature selection needed We proceed
Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
119896 nearest neighbor (WKNN) Interested readers are referredto Lei and Zuo [25] andHai et al [133] for technical details Toassess the performance of themethods a leave-one-out cross-validation approach is used the classification accuracies forMLM CLM and WKNN are 981 944 and near 100respectively The test results demonstrate that the proposedmethods can accurately identify the crack development ofgears which is very beneficial for early warning of potentialgearbox malfunction
32 Predicting RUL of Rotational Bearings In this section wereturn to the motivating example in Section 1 which aims topredict the RULof bearings As the purpose of PHM ismainlyto provide individualized prediction results it is necessary toadapt the model to specific characteristics of each bearingrevealed through past observations A natural choice is to useBayesian framework to integrate the prior information fromother bearings with observations of the in-service unit Byselecting the conjugate prior distributions model updatingcan be efficiently done
119875 (120573 | 1198841 1198842 119884119899) prop 119875 (1198841 1198842 119884119899 | 120573) sdot 120587 (120573) (7)
where 120573 is the model parameters 119884119894 is the observed vibrationmagnitude at time 119905119894 119875(1198841 1198842 119884119899 | 120573) is the likelihoodfunction given the parameter 120587(120573) is the prior distributioncarrying information from historical bearing samples and119875(120573 | 1198841 1198842 119884119899) is the posterior distribution of 120573 inte-grating the prior information and current observations Asnew observations are collected model updating can be donerepeatedly and correspondingly the predicted failure timewill also be updated
119875 (119884119896 | 1198841 1198842 119884119899)
= int119875 (120573 | 1198841 1198842 119884119899) sdot 119875 (119884119896 | 120573) 119889120573
(8)
where 119875(119884119896 | 1198841 1198842 119884119899) is the prediction of the vibrationmagnitude at some future time 119905119896 As 119899 increases the predic-tion will be more and more accurate with smaller varianceas demonstrated in Figure 5
In this example 25 bearings are tested and Figure 6 showsthe prediction interval of the failure time The 119909-axis is theindex of the bearings used in the experiments The circleswith the same 119909-axis value represent the 005 05 and 095quantiles of the failure time and the cross shows the truefailure timeThe results show that the prediction based on theabove algorithm is acceptably accurate In certain cases theprediction interval is very tight providing very informativewarnings on the potential failures
33 Predicting RUL of Lithium-Ion Batteries Using ParticleFilter Lithium-ion batteries are widely used in consumerelectronics as their sole power sources The importance ofbatteries to those devices is arguably critical As battery agesits capacity degrades and is widely used as an indicator of thebatteryrsquos health As a common rule a battery is consideredincapable of functioning as intended when its capacity dropsto 80 of its initial value In this example a particle filtering
0 100 200 300 400 5000
0005
001
0015
002
0025
003
0035
Residual life
Prob
abili
ty d
istrib
utio
n
70 failure time80 failure time
Figure 5 Predicted distribution of residual life at different observa-tion times
0 5 10 15 20 250
200
400
600
800
1000
1200
1400
1600
Bearing index
Failu
re ti
me
Figure 6 Prediction interval and the true values of failure timefor each bearing (triangle means last observed life time of bearingswhich have not yet failed)
(PF) based prognostic algorithm is used to predict RUL oflithium-ion batteries based on accelerating testing data of sixbatteries [134]
In the experiment batteries were tested with full chargingand discharging cycles under the constant-currentconstant-voltage mode The discharge rate was set to 1C which meantthe battery would be fully discharged in one hourThe experi-ment was conducted under room temperature and dischargecapacity was calculated based on integrating current overtime for each cycle Figure 7 shows the capacity degradationprocess of one testing battery
As capacity is used as the default health indicator ofbatteries there is no feature selection needed We proceed
Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
0 200 400 600 80007
08
09
1
11
Cycle
Capa
city
(Ah)
Figure 7 Capacity degradation of a lithium-ion battery
directly to the degradation modeling and prognosis Themodel of the degradation curve is assumed as follows
119862119896 = 1205741 sdot exp (1205742 sdot 119896) + 1205743 sdot 1198962+ 1205744 (9)
where 119862119896 is the battery capacity at 119896th cycle and 120574119894rsquos arethe model parameters For accurate estimation of 119862119896 anddynamically updating model parameters for better trackinga PF approach is used In the PF the state-space model fortracking has a process function 119891119896 and a measurementfunction ℎ119896
Γ119896 = 119891119896 (Γ119896minus1 120579119896minus1) 119910119896 = ℎ119896 (Γ119896 120593119896) (10)
where 119910119896 is the observed capacity Γ119896 is the collection of all120574119894rsquos estimated at the 119896th step and 120579119896 and 120593119896 are two iidnoise sequences In (10)119891119896 and ℎ119896 actually define conditionaldistributions 119901(Γ119896 | Γ119896minus1) and 119901(119910119896 | Γ119896) respectively Therecursive Bayesian filtering is then carried out via the follow-ing equations
119901 (Γ119896 | 1199101 119910119896minus1)
= int119901 (Γ119896 | Γ119896minus1) 119901 (Γ119896minus1 | 1199101 119910119896minus1) 119889Γ119896minus1
119901 (Γ119896 | 1199101 119910119896) =119901 (Γ119896 | 1199101 119910119896minus1) 119901 (119910119896 | Γ119896)
119901 (119910119896 | 1199101 119910119896minus1)
(11)
Equation (11) provides a recursive way to update the dis-tribution of Γ119896 with newly observed values For prognosisthe battery capacity at 119895 step ahead 119862119896+119895 can be estimatedby projecting Γ119896 to its all possible future paths based on119901(Γ119896 | 1199101 119910119896) Finally the RUL distribution is calculatedthrough 119901(119862119896+119895 le 08119862init) where 119862init is the initial capacityof the battery
For demonstration four batteries are usedThree of themare used for initializing model parameters and the last oneis used for testing The predictions are made at 13 23 and45 of the batteryrsquos life by treating the data of subsequentcycles unknown to the algorithm The results are shown inFigure 8 It can be seen that the algorithm can track the
observed capacity sequence very well As expected theprediction results are better and RUL PDF is narrower at thelater stage of the batteryrsquos life
4 Conclusions
PHM is a framework that offers a complete set of tools formanaging system health with individualized solutions In thispaper we have reviewed methodologies in all major aspectsof the PHM framework namely signal processing and featureextraction fault diagnosis and classification fault prognosisand condition based maintenance As can be seen PHMinvolves many subareas and hence a huge body of literatureThese areas are at very different stages of developmentWhile areas such as signal processing and feature extractionhave long been studied system failure prognosis based oncondition monitoring is still at its infancy Some subareashave already been extensively studied long before the conceptof PHM Excellent surveys have already been done in somesubareas for example in failure prognosis [19] and condition-based maintenance [30]Therefore instead of focusing on anextensive literature review in all subareas we have taken aholistic view to summarizemainstreammethods in them therole of each area in PHM and their relationships
Data-driven methodologies in PHM are closely relatedwith those in some other major research directions such asstatistical quality control reliability engineering and designof experiments It is worthwhile to briefly discuss theirrelations with PHM
41 Statistical Quality Control Statistical quality control isan area that has been extensively studied for many decadesThe main objective is to detect abnormalities or changesin a process It is generally applied to a large number ofhomogeneous units and focuses on identifying the abnormalones whichmay be traced back to process faults PHM on theother hand focuses more on how faults happen and how topredict future faults so that optimal maintenance policy canbe made rather than fault detection Furthermore researchin PHM focuses more on individual behaviors along timeinstead of cross-sectional analysis on the population charac-teristics
42 Reliability Engineering The research in PHM is closelyrelated with those in reliability engineering such as failureprediction and maintenance Many methods in PHM stemfrom those originally developed in reliability engineeringHowever they have different focuses of interests Tradi-tional reliability engineering focuses on the modeling andprediction of the entire product population without muchemphasis on variability of the individuals and their respectiveworking conditionsTherefore reliability engineering is mostvaluable for manufacturerrsquos product design and warrantypolicy making where population characteristics are crucialwhile PHM is most valuable for end users who care moreabout the specific units they have on hand
43 Design of Experiments Comparing with the PHMwhichemphasizes onlinemonitoring and dynamic updating design
12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
RUP pdf
Prediction time
(a)
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction timeRUP pdf
(b)
Real dataEstimated valuesPredicted values
0 200 400 600 80008
085
09
095
1
105
11
Cycle number
Capa
city
(Ah)
Model C
End of performance
Prediction time
RUP pdf
(c)
Figure 8 RUL predictions for lithium-ion battery (a) at 13 life (b) at 12 life (c) at 23 life
of experiments (DOE) is an offline methodology PHM andDOE are implemented at different stages DOE is appliedmostly during the system planning and design phase insteadof its operating phase where PHM is applied Tools in DOEare mainly used to analyze relationships between factors andsystem response(s) which can be very useful for variableselection enhancing system robustness and design optimiza-tion
As promising as PHM is its application in real world isstill scarce at the current stage Comparing to traditional faultdiagnosis andmaintenance programs PHMhas higher initialcost and higher requirement for the field workers Limitedresearch in prognosis and CBM is also the major hurdle of its
wide application To achieve cost-effective robust and easy-to-implement solutions so that PHM can be applied to morereal world applications there are many challenges as well asresearch opportunities These include but not limited to (1)development of robust yet low-cost sensoring technologiesfor online monitoring (2) development of more computa-tionally efficient techniques for dealing with high-volumedata (3) development of specialized signal processing andfeature extractionselection techniques optimized for con-dition monitoring and failure prognosis (4) developmentof more accurate prognostic methods that can deal withmultiple CM signals and multiple system failure modes(5) development of versatile CBM strategies that are capable
Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
of handling complex situations such as multicomponent sys-tems possibly with different maintenance levels and multipleoptimization criteria
Although there are stillmany hurdles to clear before PHMcan be widely implemented in real world engineering appli-cations its promising future has increasingly attracted manyresearchers and engineers from related fields However mostof their research work is scattered in respective areas withoutmuch collaboration by considering the holistic framework ofPHM As suggested by Lee et al [135] the authors believean integrated platform of diagnostics prognostics andmaintenance will be the future trend of PHM
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The work of Y Hai K L Tsui and Q Zhou was supportedby the Hong Kong Research Grant Council General ResearchFund Project no 11216014 and the Natural Science Foun-dation of China Project no 11471275 It was also partiallysupported by the NSFC under Grant nos 71231001 and71420107023 It is also supported by China Postdoctoral Sci-ence Foundation funded project under Grant 2013M530531the Fundamental Research Funds for the Central Universitiesof China under Grant nos FRF-MP-13-009A and FRF-TP-13-026A and the MOE PhD supervisor fund 20120006110025
References
[1] J P MacDuffie and T Fujimoto ldquoWhy dinosaurs will keepruling the auto industryrdquo Harvard Business Review vol 88 no6 pp 23ndash25 2010
[2] L Layton M Glod and L H Sun Probe Finds Metro ControlldquoAnomaliesrdquo The Washingthon Post Washington DC USA2009
[3] J Lyons ldquoBrazil blackout sparks infrastructure concernsrdquo TheWashington Post 2009
[4] J Finch ldquoToyota sudden acceleration a case study of thenational highway traffic safety administration-recalls forchangerdquo Loyola Consumer Law Review vol 22 p 472 2009
[5] J B Bowles ldquoA survey of reliability-prediction procedures formicroelectronic devicesrdquo IEEE Transactions on Reliability vol41 no 1 pp 2ndash12 1992
[6] K-L Tsui W Chiu P Gierlich D Goldsman X Liu and TMaschek ldquoA review of healthcare public health and syndromicsurveillancerdquo Quality Engineering vol 20 no 4 pp 435ndash4502008
[7] M Pecht Prognostics and Health Management of ElectronicsJohn Wiley amp Sons Hoboken NJ USA 2008
[8] F Di Maio J Hu P Tse M Pecht K Tsui and E ZioldquoEnsemble-approaches for clustering health status of oil sandpumpsrdquo Expert Systems with Applications vol 39 no 5 pp4847ndash4859 2012
[9] Bellcore ldquoReliability prediction procedure for electronic equip-mentrdquo Tech Rep TR-NWT-000332 83-86 1990
[10] M Pecht and V Ramappan ldquoAre components still the majorproblem A review of electronic system and device field failurereturnsrdquo IEEE Transactions on Components Hybrids and Man-ufacturing Technology vol 15 no 6 pp 1160ndash1164 1992
[11] D AThomas K Avers andM Pecht ldquoThe ldquotrouble not identi-fiedrdquo phenomenon in automotive electronicsrdquo MicroelectronicsReliability vol 42 no 4-5 pp 641ndash651 2002
[12] H Qi S Ganesan andM Pecht ldquoNo-fault-found and intermit-tent failures in electronic productsrdquoMicroelectronics Reliabilityvol 48 no 5 pp 663ndash674 2008
[13] R Williams J Banner I Knowles M Dube M Natishanand M Pecht ldquoAn investigation of rsquocannot duplicatersquo failuresrdquoQuality and Reliability Engineering International vol 14 no 5pp 331ndash337 1998
[14] K Anderson ldquoIntermittent fault detection amp isolation systemrdquoin Proceedings of the Maintenance Symposium and ExhibitionDepartment of Defense November 2012
[15] A G KeaneToyota FindsMost Sudden Acceleration Crashes AreDriver Error Bloomberg Washington DC USA 2010
[16] Australian Transport Safety Bureau (ATSB) ldquoUncontainedengine failure and air turn-back near San Francisco airportrdquo inATSB Transport Safety Aviation Occurrence Investigation 2010
[17] N ZGebraeelMA Lawley R Li and J K Ryan ldquoResidual-lifedistributions from component degradation signals a Bayesianapproachrdquo IIE Transactions vol 37 no 6 pp 543ndash557 2005
[18] N Gebraeel ldquoSensory-updated residual life distributions forcomponents with exponential degradation patternsrdquo IEEETransactions on Automation Science and Engineering vol 3 no4 pp 382ndash393 2006
[19] X-S Si W Wang C-H Hu and D-H Zhou ldquoRemaininguseful life estimationmdasha review on the statistical data drivenapproachesrdquo European Journal of Operational Research vol 213no 1 pp 1ndash14 2011
[20] J Z Sikorska M Hodkiewicz and L Ma ldquoPrognostic mod-elling options for remaining useful life estimation by industryrdquoMechanical Systems and Signal Processing vol 25 no 5 pp1803ndash1836 2011
[21] M M Gaber A Zaslavsky and S Krishnaswamy ldquoMining datastreams a reviewrdquo SIGMOD Record vol 34 no 2 pp 18ndash262005
[22] A Famili W-M Shen R Weber and E Simoudis ldquoDatapreprocessing and intelligent data analysisrdquo Intelligent DataAnalysis vol 1 no 1 pp 3ndash23 1997
[23] Oslash D Trier A K Jain and T Taxt ldquoFeature extraction methodsfor character recognitionmdasha surveyrdquo Pattern Recognition vol29 no 4 pp 641ndash662 1996
[24] Y Lei Z He and Y Zi ldquoApplication of an intelligent classifica-tionmethod tomechanical fault diagnosisrdquo Expert Systems withApplications vol 36 no 6 pp 9941ndash9948 2009
[25] Y Lei and M J Zuo ldquoGear crack level identification based onweighted K nearest neighbor classification algorithmrdquoMechan-ical Systems and Signal Processing vol 23 no 5 pp 1535ndash15472009
[26] W Wang P Jones and D Partridge ldquoA comparative study offeature-salience ranking techniquesrdquo Neural Computation vol13 no 7 pp 1603ndash1623 2001
14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Mathematical Problems in Engineering
[27] R Battiti ldquoUsing mutual information for selecting features insupervised neural net learningrdquo IEEE Transactions on NeuralNetworks vol 5 no 4 pp 537ndash550 1994
[28] S Wu and T W S Chow ldquoInduction machine fault detectionusing SOM-based RBF neural networksrdquo IEEE Transactions onIndustrial Electronics vol 51 no 1 pp 183ndash194 2004
[29] P Mitra C A Murthy and S K Pal ldquoDensity-based multiscaledata condensationrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 24 no 6 pp 734ndash747 2002
[30] AK S JardineD Lin andD Banjevic ldquoA review onmachinerydiagnostics and prognostics implementing condition-basedmaintenancerdquoMechanical Systems and Signal Processing vol 20no 7 pp 1483ndash1510 2006
[31] M Lebold K McClintic R Campbell C Byington and KMaynard ldquoReview of vibration analysis methods for gearboxdiagnostics and prognosticsrdquo in Proceedings of the 54th Meetingof the Society for Machinery Failure Prevention Technology pp623ndash634 Virginia Beach Va USA 2000
[32] P D Samuel and D J Pines ldquoA review of vibration-basedtechniques for helicopter transmission diagnosticsrdquo Journal ofSound and Vibration vol 282 no 1-2 pp 475ndash508 2005
[33] E Bechhoefer and M Kingsley ldquoA review of time synchronousaverage algorithmsrdquo in Proceedings of the Annual Conference ofthe Prognostics and Health Management Society 2009
[34] S Braun ldquoThe synchronous (time domain) average revisitedrdquoMechanical Systems and Signal Processing vol 25 no 4 pp1087ndash1102 2011
[35] P J Brockwell andR ADavisTime SeriesTheory andMethodsSpringer New York NY USA 2009
[36] M Yang and V Makis ldquoARX model-based gearbox fault detec-tion and localization under varying load conditionsrdquo Journal ofSound and Vibration vol 329 no 24 pp 5209ndash5221 2010
[37] H Li H Zheng and L Tang ldquoGear fault diagnosis based onorder cepstrum analysisrdquo Journal of Vibration and Shock vol25 no 5 pp 65ndash68 2006
[38] C L Nikias and J M Mendel ldquoSignal processing with higher-order spectrardquo IEEE Signal Processing Magazine vol 10 no 3pp 10ndash37 1993
[39] L Qu Y Chen and J Liu ldquoThe holospectrum a new FFT basedrotor diagnostic methodrdquo in Proceedings of the 1st InternationalMachinery Monitoring and Diagnostics Conference pp 196ndash201Las Vegas Nev USA 1989
[40] K Grochenig Foundations of Time-Frequency AnalysisBirkhauser Boston Mass USA 2000
[41] Q He Y Liu Q Long and J Wang ldquoTime-frequency manifoldas a signature for machine health diagnosisrdquo IEEE Transactionson Instrumentation and Measurement vol 61 no 5 pp 1218ndash1230 2012
[42] M R Portnoff ldquoTime-frequency representation of digital sig-nals and systems based on short-time fourier analysisrdquo IEEETransactions on Acoustics Speech and Signal Processing vol 28no 1 pp 55ndash59 1980
[43] J Jin and J Shi ldquoFeature-preserving data compression ofstamping tonnage information using waveletsrdquo Technometricsvol 41 no 4 pp 327ndash339 1999
[44] J Jin and J Shi ldquoAutomatic feature extraction of waveformsignals for in-process diagnostic performance improvementrdquo
Journal of Intelligent Manufacturing vol 12 no 3 pp 257ndash2682001
[45] H Zheng Z Li and X Chen ldquoGear fault diagnosis based oncontinuous wavelet transformrdquo Mechanical Systems and SignalProcessing vol 16 no 2-3 pp 447ndash457 2002
[46] N G Nikolaou and I A Antoniadis ldquoRolling element bearingfault diagnosis using wavelet packetsrdquoNDT and E Internationalvol 35 no 3 pp 197ndash205 2002
[47] J Lin and L Qu ldquoFeature extraction based on morlet waveletand its application for mechanical fault diagnosisrdquo Journal ofSound and Vibration vol 234 no 1 pp 135ndash148 2000
[48] Z K Peng and F L Chu ldquoApplication of the wavelet transformin machine condition monitoring and fault diagnostics areview with bibliographyrdquo Mechanical Systems and Signal Pro-cessing vol 18 no 2 pp 199ndash221 2004
[49] F Leonard ldquoPhase spectrogram and frequency spectrogram asnew diagnostic toolsrdquoMechanical Systems and Signal Processingvol 21 no 1 pp 125ndash137 2007
[50] Q Meng and L Qu ldquoRotating machinery fault diagnosis usingWigner distributionrdquoMechanical Systems and Signal Processingvol 5 no 3 pp 155ndash166 1991
[51] W J Staszewski K Worden and G R Tomlinson ldquoTime-frequency analysis in gearbox fault detection using theWigner-Ville distribution and pattern recognitionrdquoMechanical Systemsand Signal Processing vol 11 no 5 pp 673ndash692 1997
[52] N Baydar and A Ball ldquoA comparative study of acoustic andvibration signals in detection of gear failures usingWigner-VilledistributionrdquoMechanical Systems and Signal Processing vol 15no 6 pp 1091ndash1107 2001
[53] S U Lee D Robb and C Besant ldquoThe directional Choi-Williams distribution for the analysis of rotor-vibration signalsrdquoMechanical Systems and Signal Processing vol 15 no 4 pp 789ndash811 2001
[54] Y Ding J Shi and D Ceglarek ldquoDiagnosability analysis ofmulti-station manufacturing processesrdquo ASME TransactionsJournal of Dynamic Systems Measurement and Control vol 124no 1 pp 1ndash13 2002
[55] S Zhou Y Ding Y Chen and J Shi ldquoDiagnosability studyof multistage manufacturing processes based on linear mixed-effects modelsrdquo Technometrics vol 45 no 4 pp 312ndash325 2003
[56] M Sampath R Sengupta S Lafortune K Sinnamohideenand D C Teneketzis ldquoFailure diagnosis using discrete-eventmodelsrdquo IEEE Transactions on Control Systems Technology vol4 no 2 pp 105ndash124 1996
[57] A Benveniste E Fabre S Haar andC Jard ldquoDiagnosis of asyn-chronous discrete-event systems a net unfolding approachrdquoIEEE Transactions on Automatic Control vol 48 no 5 pp 714ndash727 2003
[58] M Steinder and A S Sethi ldquoProbabilistic fault localizationin communication systems using belief networksrdquo IEEEACMTransactions on Networking vol 12 no 5 pp 809ndash822 2004
[59] N Dawes J Altoft and B Pagurek ldquoNetwork diagnosis by rea-soning in uncertain nested evidence spacesrdquo IEEE Transactionson Communications vol 43 no 2 pp 466ndash476 1995
[60] J Liu D Djurdjanovic K A Marko and J Ni ldquoA divide andconquer approach to anomaly detection localization and diag-nosisrdquo Mechanical Systems and Signal Processing vol 23 no 8pp 2488ndash2499 2009
Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 15
[61] AWidodo and B S Yang ldquoSupport vectormachine inmachinecondition monitoring and fault diagnosisrdquo Mechanical Systemsand Signal Processing vol 21 no 6 pp 2560ndash2574 2007
[62] R Hao Z Peng Z Feng and F Chu ldquoApplication of supportvector machine based on pattern spectrum entropy in faultdiagnostics of rolling element bearingsrdquo Measurement Scienceand Technology vol 22 no 4 Article ID 045708 2011
[63] R Casimir E Boutleux G Clerc and A Yahoui ldquoThe useof features selection and nearest neighbors rule for faultsdiagnostic in induction motorsrdquo Engineering Applications ofArtificial Intelligence vol 19 no 2 pp 169ndash177 2006
[64] V T Tran B-S Yang M-S Oh and A C C Tan ldquoFault diag-nosis of induction motor based on decision trees and adaptiveneuro-fuzzy inferencerdquo Expert Systems with Applications vol36 no 2 pp 1840ndash1849 2009
[65] W Sun J Chen and J Li ldquoDecision tree and PCA-based faultdiagnosis of rotatingmachineryrdquoMechanical Systems and SignalProcessing vol 21 no 3 pp 1300ndash1317 2007
[66] Y Lei M J Zuo Z He and Y Zi ldquoA multidimensional hybridintelligent method for gear fault diagnosisrdquo Expert Systems withApplications vol 37 no 2 pp 1419ndash1430 2010
[67] B Samanta and K R Al-Balushi ldquoArtificial neural networkbased fault diagnostics of rolling element bearings using time-domain featuresrdquoMechanical Systems and Signal Processing vol17 no 2 pp 317ndash328 2003
[68] S Khomfoi and L M Tolbert ldquoFault diagnostic system for amultilevel inverter using a neural networkrdquo IEEE Transactionson Power Electronics vol 22 no 3 pp 1062ndash1069 2007
[69] Z Li X Yan C Yuan J Zhao and Z Peng ldquoFault detectionand diagnosis of a gearbox in marine propulsion systems usingbispectrum analysis and artificial neural networksrdquo Journal ofMarine Science and Application vol 10 no 1 pp 17ndash24 2011
[70] H Qiu J Lee J Lin and G Yu ldquoRobust performance degrada-tion assessment methods for enhanced rolling element bearingprognosticsrdquo Advanced Engineering Informatics vol 17 no 3-4pp 127ndash140 2003
[71] D Wang Q Miao and R Kang ldquoRobust health evaluation ofgearbox subject to tooth failure with wavelet decompositionrdquoJournal of Sound and Vibration vol 324 no 3ndash5 pp 1141ndash11572009
[72] Y Pan J Chen and X Li ldquoBearing performance degradationassessment based on lifting wavelet packet decomposition andfuzzy c-meansrdquo Mechanical Systems and Signal Processing vol24 no 2 pp 559ndash566 2010
[73] C M Bishop Pattern Recognition andMachine Learning vol 4Springer New York NY USA 2006
[74] T Hastie R Tibshirani and J J H Friedman The Elements ofStatistical Learning Springer New York NY USA 2001
[75] S Kotsiantis I Zaharakis and P Pintelas ldquoSupervised machinelearning a review of classification techniquesrdquo Frontiers inArtificial Intelligence and Applications vol 160 article 3 2007
[76] G AWhitmore ldquoEstimating degradation by a wiener diffusionprocess subject to measurement errorrdquo Lifetime Data Analysisvol 1 no 3 pp 307ndash319 1995
[77] X Wang ldquoWiener processes with random effects for degrada-tion datardquo Journal of Multivariate Analysis vol 101 no 2 pp340ndash351 2010
[78] WWangMCarrWXu andK Kobbacy ldquoAmodel for residuallife prediction based on Brownian motion with an adaptivedriftrdquo Microelectronics Reliability vol 51 no 2 pp 285ndash2932011
[79] Z S Ye K L Tsui Y Wang and M Pecht ldquoDegradationdata analysis usingWiener processes withmeasurement errorsrdquoIEEE Transactions on Reliability vol 62 no 4 pp 772ndash7802013
[80] Z Ye N Chen and K-L Tsui ldquoA bayesian approach tocondition monitoring with imperfect inspectionsrdquo Quality andReliability Engineering International 2013
[81] Z Wang C Hu W Wang Z Zhou and X Si ldquoA case study ofremaining storage life prediction using stochastic filtering withthe influence of condition monitoringrdquo Reliability Engineeringand System Safety vol 132 pp 186ndash195 2014
[82] X S Si W Wang M Y Chen C H Hu and D H Zhou ldquoAdegradation path-dependent approach for remaining useful lifeestimation with an exact and closed-form solutionrdquo EuropeanJournal of Operational Research vol 226 no 1 pp 53ndash66 2013
[83] X-S Si W Wang C-H Hu M-Y Chen and D-H Zhou ldquoAWiener-process-based degradationmodel with a recursive filteralgorithm for remaining useful life estimationrdquo MechanicalSystems and Signal Processing vol 35 no 1-2 pp 219ndash237 2013
[84] N D Singpurwalla ldquoSurvival in dynamic environmentsrdquo Sta-tistical Science vol 10 pp 86ndash103 1995
[85] J Lawless and M Crowder ldquoCovariates and random effects ina gamma process model with application to degradation andfailurerdquo Lifetime Data Analysis vol 10 no 3 pp 213ndash227 2004
[86] Z S Ye M Xie L C Tang and N Chen ldquoSemiparametricestimation of gamma processes for deteriorating productsrdquoTechnometrics 2014
[87] J M van Noortwijk ldquoA survey of the application of gammaprocesses in maintenancerdquo Reliability Engineering amp SystemSafety vol 94 no 1 pp 2ndash21 2009
[88] X Wang and D Xu ldquoAn inverse Gaussian process model fordegradation datardquo Technometrics vol 52 no 2 pp 188ndash1972010
[89] Z S Ye and N Chen ldquoThe inverse Gaussian process as adegradation modelrdquo Technometrics vol 56 no 3 pp 302ndash3112014
[90] A Ghasemi S Yacout and M-S Ouali ldquoParameter estimationmethods for condition-based maintenance with indirect obser-vationsrdquo IEEE Transactions on Reliability vol 59 no 2 pp 426ndash439 2010
[91] W Wang and A H Christer ldquoTowards a general conditionbased maintenance model for a stochastic dynamic systemrdquoJournal of the Operational Research Society vol 51 no 2 pp145ndash155 2000
[92] Z-Q Wang C-H Hu W Wang and X-S Si ldquoAn additivewiener process-based prognostic model for hybrid deteriorat-ing systemsrdquo IEEE Transactions on Reliability vol 63 no 1 pp208ndash222 2014
[93] W QMeeker and L A Escobar Statistical Methods for Reliabil-ity Data vol 78 Wiley New York NY USA 1998
[94] C J Lu and W Q Meeker ldquoUsing degradation measures toestimate a time-to-failure distributionrdquo Technometrics vol 35no 2 pp 161ndash174 1993
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
16 Mathematical Problems in Engineering
[95] K Yang and G Yang ldquoDegradation reliability assessmentusing severe critical valuesrdquo International Journal of ReliabilityQuality and Safety Engineering vol 5 no 1 pp 85ndash95 1998
[96] K Yang and A Jeang ldquoStatistical surface roughness checkingprocedure based on a cutting tool wear modelrdquo Journal ofManufacturing Systems vol 13 no 1 pp 1ndash8 1994
[97] S-T Tseng M Hamada and C-H Chiao ldquoUsing degradationdata to improve fluorescent lamp reliabilityrdquo Journal of QualityTechnology vol 27 no 4 pp 363ndash369 1995
[98] K B Goode B J Roylance and J Moore ldquoDevelopment ofpredictive model for monitoring condition of hot strip millrdquoIronmaking and Steelmaking vol 25 no 1 pp 42ndash46 1998
[99] S Chakraborty NGebraeelM Lawley andHWan ldquoResidual-life estimation for components with non-symmetric priorsrdquo IIETransactions vol 41 no 4 pp 372ndash387 2009
[100] Z Xu and D Zhou ldquoA degradation measurements based real-time reliability prediction methodrdquo in Proceedings of the 6thIFAC Symposium on Fault Detection Supervision and Safety ofTechnical Processes (SAFEPROCESS rsquo06) pp 950ndash955 BeijingChina September 2006
[101] N Chen and K L Tsui ldquoCondition monitoring and remaininguseful life prediction using degradation signals Revisitedrdquo IIETransactions vol 45 no 9 pp 939ndash952 2013
[102] N ZGebraeel andMA Lawley ldquoAneural network degradationmodel for computing and updating residual life distributionsrdquoIEEE Transactions on Automation Science and Engineering vol5 no 1 pp 154ndash163 2008
[103] D R Cox ldquoRegression models and life-tablesrdquo Journal of theRoyal Statistical Society Series B Methodological vol 34 pp187ndash220 1972
[104] H Liao W Zhao and H Guo ldquoPredicting remaining usefullife of an individual unit using proportional hazards model andlogistic regression modelrdquo in Proceedings of the Annual Relia-bility and Maintainability Symposium (RAMS rsquo06) pp 127ndash132Newport Beach Calif USA January 2006
[105] Q Zhou J Son S Zhou X Mao and M Salman ldquoRemaininguseful life prediction of individual units subject to hard failurerdquoIIE Transactions vol 46 no 10 pp 1017ndash1030 2014
[106] J L Bogdanoff and F Kozin Probabilistic Models of CumulativeDamage John Wiley amp Sons New York NY USA 1985
[107] M-L T Lee and G A Whitmore ldquoThreshold regression forsurvival analysis modeling event times by a stochastic processreaching a boundaryrdquo Statistical Science vol 21 no 4 pp 501ndash513 2006
[108] M L T Lee and G A Whitmore ldquoProportional hazards andthreshold regression their theoretical and practical connec-tionsrdquo Lifetime Data Analysis vol 16 no 2 pp 196ndash214 2010
[109] R Ahmad and S Kamaruddin ldquoAn overview of time-basedand condition-based maintenance in industrial applicationrdquoComputers amp Industrial Engineering vol 63 no 1 pp 135ndash1492012
[110] H Wang ldquoA survey of maintenance policies of deterioratingsystemsrdquo European Journal of Operational Research vol 139 no3 pp 469ndash489 2002
[111] M Woodyard ldquoGM monitor may add miles between oilchangesrdquo Automotive News vol 73 p 28 1998
[112] V Makis and A K S Jardine ldquoOptimal replacement in theproportional hazards modelrdquo INFOR vol 30 pp 172ndash183 1992
[113] B Bergman ldquoOptimal replacement under a general failuremodelrdquo Advances in Applied Probability vol 10 no 2 pp 431ndash451 1978
[114] W Wang ldquoA model to determine the optimal critical leveland the monitoring intervals in condition-based maintenancerdquoInternational Journal of Production Research vol 38 no 6 pp1425ndash1436 2000
[115] A Grall C Berenguer and L Dieulle ldquoA condition-basedmaintenance policy for stochastically deteriorating systemsrdquoReliability Engineering amp System Safety vol 76 no 2 pp 167ndash180 2002
[116] H R Golmakani and F Fattahipour ldquoOptimal replacement pol-icy and inspection interval for condition-based maintenancerdquoInternational Journal of Production Research vol 49 no 17 pp5153ndash5167 2011
[117] K T Huynh A Barros C Berenguer and I T Castro ldquoAperiodic inspection and replacement policy for systems subjectto competing failure modes due to degradation and traumaticeventsrdquo Reliability Engineering and System Safety vol 96 no 4pp 497ndash508 2011
[118] L Dieulle C Berenguer A Grall andM Roussignol ldquoSequen-tial condition-basedmaintenance scheduling for a deterioratingsystemrdquo European Journal of Operational Research vol 150 no2 pp 451ndash461 2003
[119] W Wang ldquoModelling condition monitoring intervals a hybridof simulation and analytical approachesrdquo Journal of the Opera-tional Research Society vol 54 no 3 pp 273ndash282 2003
[120] R J Ferreira A T de Almeida and C A Cavalcante ldquoA multi-criteria decision model to determine inspection intervals ofcondition monitoring based on delay time analysisrdquo ReliabilityEngineering amp System Safety vol 94 no 5 pp 905ndash912 2009
[121] B Castanier C Berenguer and A Grall ldquoA sequentialcondition-based repairreplacement policy with non-periodicinspections for a system subject to continuous wearrdquo AppliedStochasticModels in Business and Industry vol 19 no 4 pp 327ndash347 2003
[122] H Liao E A Elsayed and L-Y Chan ldquoMaintenance ofcontinuously monitored degrading systemsrdquo European Journalof Operational Research vol 175 no 2 pp 821ndash835 2006
[123] J Barata C Soares M Marseguerra and E Zio ldquoSimulationmodelling of repairablemulti-component deteriorating systemsfor ldquoon conditionrdquo maintenance optimisationrdquo Reliability Engi-neering amp System Safety vol 76 no 3 pp 255ndash264 2002
[124] M-Y You L Li G Meng and J Ni ldquoCost-effective updatedsequential predictive maintenance policy for continuouslymonitored degrading systemsrdquo IEEE Transactions on Automa-tion Science and Engineering vol 7 no 2 pp 257ndash265 2010
[125] M-Y You F Liu WWang and G Meng ldquoStatistically plannedand individually improved predictive maintenance manage-ment for continuously monitored degrading systemsrdquo IEEETransactions on Reliability vol 59 no 4 pp 744ndash753 2010
[126] Z Tian T Jin B Wu and F Ding ldquoCondition based mainte-nance optimization for wind power generation systems undercontinuous monitoringrdquo Renewable Energy vol 36 no 5 pp1502ndash1509 2011
[127] L LiM You and JNi ldquoReliability-based dynamicmaintenancethreshold for failure prevention of continuously monitoreddegrading systemsrdquo Journal of Manufacturing Science and Engi-neering vol 131 no 3 Article ID 031010 2009
Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 17
[128] E A Elsayed and H Zhang ldquoOptimum threshold level ofdegraded structures based on sensors datardquo in Proceedings of the12th ISSAT International Conference onReliability andQuality inDesign pp 187ndash191 August 2006
[129] D I Cho and M Parlar ldquoA survey of maintenance models formulti-unit systemsrdquo European Journal of Operational Researchvol 51 no 1 pp 1ndash23 1991
[130] R Nicola and R Dekker ldquoOptimal maintenance of multi-component systems a reviewrdquo in Complex System MaintenanceHandbook D N PMurthy andA K S Kobbacy Eds SpringerAmsterdam The Netherlands 2008
[131] Z Tian and H Liao ldquoCondition based maintenance optimiza-tion for multi-component systems using proportional hazardsmodelrdquo Reliability Engineering and System Safety vol 96 no 5pp 581ndash589 2011
[132] Q Zhu H Peng and G J van Houtum ldquoA condition-basedmaintenance policy for multi-component systems with a highmaintenance setup costrdquo BETAWorking Paper 400 EindhovenUniversity of Technology 2012
[133] Y Hai K Tsui and M Zuo ldquoGear crack level classificationbased on multinomial logit model and cumulative link modelrdquoin Proceedings of the 3rd Annual IEEE Prognostics and SystemHealth Management Conference (PHM rsquo12) pp 1ndash6 IEEE May2012
[134] Y Xing E Ma K Tsui and M Pecht ldquoAn ensemble modelfor predicting the remaining useful performance of lithium-ionbatteriesrdquoMicroelectronics Reliability vol 53 no 6 pp 811ndash8202013
[135] J Lee R Abujamra A K Jardine D Lin and D Banje-vic ldquoAn integrated platform for diagnostics prognostics andmaintenance optimizationrdquo in Proceedings of the IntelligentMaintenance Systems Conference pp 15ndash27 2004
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of