research article uncertainty quantification in control ... · research article uncertainty...
TRANSCRIPT

Research ArticleUncertainty Quantification in Control Problems forFlocking Models
Giacomo Albi1 Lorenzo Pareschi2 and Mattia Zanella2
1Fakultat fur Mathematik Technische Universitat Munchen Boltzmannstraszlige 3 Garching 85748 Munich Germany2Department of Mathematics and Computer Science University of Ferrara Via N Machiavelli 35 44121 Ferrara Italy
Correspondence should be addressed to Mattia Zanella mattiazanellaunifeit
Received 19 January 2015 Revised 27 April 2015 Accepted 28 April 2015
Academic Editor Angel Sanchez
Copyright copy 2015 Giacomo Albi et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The optimal control of flockingmodels with random inputs is investigated from a numerical point of viewThe effect of uncertaintyin the interaction parameters is studied for a Cucker-Smale type model using a generalized polynomial chaos (gPC) approachNumerical evidence of threshold effects in the alignment dynamic due to the random parameters is given The use of a selectivemodel predictive control permits steering of the system towards the desired state even in unstable regimes
1 Introduction
The aggregate motion of a multiagent system is frequentlyseen in the real world Common examples are schools offishes swarms of bees and herds of sheep natural phenomenathat inspired important applications in many fields such asbiology engineering and economy [1] As a consequence thesignificance of new mathematical models for understandingand predicting these complex dynamics is widely recognizedSeveral heuristic rules of flocking have been introduced asalignment separation and cohesion [2 3] Nowadays thesemathematical problems and their constrained versions aredeeply studied from both the microscopic viewpoint [4ndash7]and their kinetic and mean-field approximations [8ndash13] Werefer to [1] for a recent introduction on the subject
In an applicative framework a fundamental step for thestudy of such models is represented by the introduction ofstochastic parameters reflecting the uncertainty due to widerange of phenomena such as the weathers influence duringan experiment temperature variations or even human errorsTherefore quantifying the influence of uncertainties on themain dynamics is of paramount importance to build morerealistic models and to give better predictions of their behav-ior In the modeling of self-organized system different waysto include random sources have been studied and analyzedsee for example [3 14ndash17] In this paper we focus on
the case where the uncertainty acts directly in the parametercharacterizing the interaction dynamic between the agents
We present a numerical approach having roots in thenumerical techniques for uncertainty quantification (UQ)and model predictive control (MPC) Among the mostpopular methods for UQ the generalized polynomial chaos(gPC) has recently received deepest attentions [18] Jointlywith StochasticGalerkin (SG) this class of numericalmethodsis usually applied in physical and engineering problemsfor which fast convergence is needed Applications of gPC-Galerkin schemes to flocking dynamics and their controlledversions are almost unexplored in the actual state of art
We give numerical evidence of threshold effects in thealignment dynamic due to the random parameters In par-ticular the presence of a negative tail in the distribution ofthe random inputs leads to the divergence of the expectedvalues for the system velocities The use of a selective modelpredictive control permits steering of the system towards thedesired state even in such unstable regimes
The rest of the paper is organized as follows In Sec-tion 2 we introduce briefly a Cucker-Smale dynamic withinteraction function depending on stochastic parameters andanalyze the system behavior in the case of uniform interac-tions The gPC approach is then summarized in Section 3Subsequently in Section 4 we consider the gPC scheme ina constrained setting and derive a selective model predictive
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 850124 14 pageshttpdxdoiorg1011552015850124
2 Mathematical Problems in Engineering
approximation of the system Next in Section 5 we reportseveral numerical experiments which illustrate the differentfeatures of the numerical method Extensions of the presentapproach are finally discussed in Section 6
2 Cucker-Smale Dynamic withRandom Inputs
We introduce a Cucker-Smale type [10] differential systemdepending on a random variable 120579 isin Ω sube R with a givendistribution 119891(120579) Let (119909
119894 V119894) isin R2119889 119889 ge 1 evolving as
follows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
(1)
where 119870 is a time-dependent random function character-izing the uncertainty in the interaction rates and 119867(sdot sdot)
is a symmetric function describing the dependence of thealignment dynamic from the agents positions A classicalchoice of space-dependent interaction function is related tothe distance between two agents
119867 (119909 119910) =1
(1205772 +1003816100381610038161003816119909 minus 119910
10038161003816100381610038162)120574 (2)
where 120574 ge 0 and 120577 gt 0 are given parameters Mathematicalresults concerning the system behavior in the deterministiccase (119870 equiv 1) can be found in [10] In particular unconditionalalignment emerges for 120574 lt 12 Let us observe that even forthe model with random inputs (1) the mean velocity of thesystem is conserved in time
V (120579 119905) =1119873
119873
sum
119894=1V119894 (120579 119905)
119889
119889119905V (120579 119905) = 0
(3)
since the symmetry of 119867 implies
119873
sum
119894119895=1119867 (119909119894 119909119895) V119895 (120579 119905) =
119873
sum
119894119895=1119867 (119909119894 119909119895) V119894 (120579 119905) (4)
Therefore for each 119905 ge 0 we haveV(120579 119905) = V(120579 0)
21 The Uniform Interaction Case To better understandthe leading dynamic let us consider the simpler uniforminteraction case when 119867 equiv 1 leading to the followingequation for the velocities
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1(V119895 (120579 119905) minus V
119894 (120579 119905))
= 119870 (120579 119905) (V (120579 0) minus V119894 (120579 119905))
(5)
The differential equation (5) admits an exact solutiondepending on the random input 120579More precisely if the initialvelocities are deterministically known we have that
V119894 (120579 119905) = V+ (V
119894 (0) minusV) expminus int
119905
0119870 (120579 119904) 119889119904 (6)
whereV = V(0) is the mean velocity of the system In whatfollows we analyze the evolution of (6) for different choices of119870(120579 119905) and of the distribution of the random variable 120579
Example 1 Let us consider a random scattering rate writtenin terms of the following decomposition
119870 (120579 119905) = 119896 (120579) ℎ (119905) (7)
where ℎ(119905) is a nonnegative function depending on 119905 isin R+The expected velocity of the 119894th agent is defined by
V119894 (119905) = E
120579[V119894 (120579 119905)] = int
Ω
V119894 (120579 119905) 119891 (120579) 119889120579 (8)
Then each agent evolves its expected velocity according to
V119894 (119905)
= intΩ
[V+ (V119894 (0) minusV) expminus119896 (120579) int
119905
0ℎ (119904) 119889119904]
sdot 119891 (120579) 119889120579
(9)
For example let us choose 119896(120579) = 120579 where the randomvariable is normally distributed that is 120579 sim N(120583 120590
2) Then
for each 119894 = 1 119873 we need to evaluate the followingintegral
V+V119894 (0) minus V
radic21205871205902
sdot intR
expminus120579 int
119905
0ℎ (119904) 119889119904 expminus
(120579 minus 120583)2
21205902 119889120579
(10)
The explicit form is easily found through standard tech-niques and yields
V119894 (119905) = V+ (V
119894 (0) minusV)
sdot expminus120583 int
119905
0ℎ (119904) 119889119904 +
1205902
2(int
119905
0ℎ (119904) 119889119904)
2
(11)
From (11) we observe a threshold effect in the asymptoticconvergence of the mean velocity of each agent towardV Itis immediately seen that if
int
119905
0ℎ (119904) 119889119904 gt
2120583
1205902 (12)
it follows that for 119905 rarr +infin the expected velocity V119894diverges
In particular if ℎ(119904) equiv 1 we have that the solution starts todiverge as soon as 119905 gt 120583120590
2 Note that this threshold effect isessential due to the negative tail of the normal distribution
Mathematical Problems in Engineering 3
In fact if we now consider a random variable taking onlynonnegative values for example exponentially distributed120579 sim Exp(120582) for some positive parameter 120582 gt 0 from (9) weobtain
V119894 (119905) = V+ (V
119894 (0) minusV) int
+infin
0119890minus120579119905
120582119890minus120582120579
119889120579 (13)
which corresponds to
V119894 (119905) = V+ (V
119894 (0) minusV)120582
119905 + 120582 (14)
and therefore V119894(119905) rarr V as 119905 rarr infin Then independently
from the choice of the rate 120582 gt 0 we obtain for each agentconvergences toward the average initial velocity of the systemFinally in case of a uniform random variable 120579 sim 119880([119886 119887])weobtain
V119894 (119905) = V+ (V
119894 (0) minusV) int
119887
119886
1119887 minus 119886
119890minus120579119905
119889120579 (15)
that is
V119894 (119905) = V+
V119894 (0) minus V
119887 minus 119886(
119890minus119886119905
119905minus
119890minus119887119905
119905) (16)
which implies the divergence of the system in time as soon as119886 isin R assumes negative values
Example 2 Next we consider a random scattering rate withtime-dependent distribution function that is
119870 (120579 119905) = 120579 (119905) (17)
with 120579(119905) sim 119891(120579 119905) As an example we investigate thecase of a normally distributed random parameter with givenmean and time-dependent variance 120579 sim N(120583 120590
2(119905)) It is
straightforward to rewrite 120579 as a translation of a standardnormal-distributed variable 120579 that is
120579 = 120583 + 120590 (119905) 120579 (18)
where 120579 sim N(0 1) The expected velocities read
V119894 (119905) = V+
(V119894 (0) minus V)
radic2120587
sdot intR
expminus120583119905 minus 120579 int
119905
0120590 (119904) 119889119904 expminus
1205792
2 119889120579
(19)
which correspond to
V119894 (119905)
= V
+ (V119894 (0) minusV) expminus120583119905 +
12
(int
119905
0120590 (119904) 119889119904)
2
(20)
Similarly to the case of a time-independent normalvariable a threshold effect occurs for large times that is thefollowing condition on the variance of the distribution
(int
119905
0120590 (119904) 119889119904)
2gt 2120583119905 (21)
implies the divergence of system (5) As a consequenceinstability can be avoided by assuming a variance decreasingsufficiently fast in timeThe simplest choice is represented by120590(119905) = 1119905
120572 for some 120572 isin [12 1) Condition (21) becomes
(1199051minus120572
1 minus 120572)
2
gt 2120583119905 (22)
For example if 120572 = 12 the previous condition impliesthat the system diverges for each 120583 lt 2
3 A gPC Based Numerical Approach
In this section we approximate the Cucker-Smale modelwith random inputs using a generalized polynomial chaosapproach For the sake of claritywe first recall somebasic factsconcerning gPC approximations
31 Preliminaries on gPC Approximations Let (ΩF 119875) be aprobability space that is an ordered triple with Ω any setFa 120590-algebra and 119875 F rarr [0 1] a probability measure onFwhere we define a random variable
120579 (ΩF) 997888rarr (RBR) (23)
with BR the Borel set of R Moreover let us consider 119878 sub
R119889 119889 ge 1 and [0 119879] sub R certain spatial and temporalsubsets For the sake of simplicity we focus on real-valuedfunctions depending on a single random input
119892 (119909 120579 119905) 119878 times Ω times 119879 997888rarr R119889 119892 isin 119871
2(ΩF 119875) (24)
In any case it is possible to extend the setup of theproblem to a 119901-dimensional vector of random variables 120579 =
(1205791 120579119901) see [19] Let us consider now the linear spaceof polynomials of 120579 of degree up to 119872 namely P
119872(120579)
From classical results in approximation theory it is possibleto represent the distribution of random functions withorthogonal polynomials Φ
119896(120579)119872
119896=0 that is an orthogonalbasis of 119871
2(ΩF 119875)
E120579
[Φℎ (120579) Φ
119896 (120579)] = E120579
[Φℎ (120579)
2] 120575ℎ119896
(25)
with 120575ℎ119896
as the Kronecker delta function Assuming thatthe probability law 119875(120579
minus1(119861)) forall119861 isin BR involved in the
definition of the introduced function 119892(119909 120579 119905) has finitesecond-order moment then the complete polynomial chaosexpansion of 119892 is given by
119892 (119909 120579 119905) = sum
119898isinN
119892119898 (119909 119905) Φ
119898 (120579) (26)
4 Mathematical Problems in Engineering
According to the Cameron-Martin theorem and to theAskey scheme results that pave a connection between ran-dom variables and orthogonal polynomials [18 20 21] wechose a set of polynomials which constitutes the optimal basiswith respect to the distribution of the introduced randomvariable in agreement with Table 1
Let us consider now a general formulation for a randomlyperturbed problem
D (119909 119905 120579 119892) = 119891 (119909 119905 120579) (27)
where we indicated withD a differential operator In generalthe randomness introduced in the problem by 120579 acts as aperturbation ofD of the function 119892 or occurs as uncertaintyof the initial conditions In this work we focus on the firsttwo aspects assuming that initial positions and velocities aredeterministically known
The generalized polynomial chaos method approximatesthe solution 119892(119909 120579 119905) of (27) with its 119872th-order polynomialchaos expansion and considers the Galerkin projections ofthe introduced differential problem that is
E120579
[D (119909 119905 120579 119892) sdot Φℎ (120579)] = E
120579[119891 (119909 120579 119905) sdot Φ
ℎ (120579)]
ℎ = 0 1 119872
(28)
Due to the Galerkin orthogonality between the linearspace P
119872and the error produced in the representation of
119892(119909 120579 119905) with a truncated series from (28) we obtain a set of119872 + 1 purely deterministic equations for the expansion coef-ficients 119892
119898(119909 119905) These subproblems can be solved through
classical discretization techniques From the numerical pointof view through a gPC-type method it is possible to achievean exponential order of convergence to the exact solution ofthe problem unlike Monte Carlo techniques for which theorder is 119874(1radic119872) where 119872 is the number of samples
32 gPC Approximation of the Alignment Model We applythe described gPC decomposition to the solution of thenonhomogeneous differential equation V
119894(120579 119905) in (6) and to
the stochastic scattering rate 119870(120579 119905) that is
V119872119894
(120579 119905) =
119872
sum
119898=0V119894119898 (119905) Φ
119898 (120579)
119870119872
(120579 119905) =
119872
sum
119897=0119897 (119905) Φ
119897 (120579)
(29)
whereV119894119898 (119905) = E
120579[V119894 (120579 119905) Φ
119898 (120579)]
119897 (119905) = E
120579[119870 (120579 119905) Φ
119897 (120579)]
(30)
We obtain the following polynomial chaos expansion
119889
119889119905
119872
sum
119898=0V119894119898
Φ119898 (120579) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119897119898=0119897 (119905) (V
119895119898minus V119894119898
) Φ119897 (120579) Φ
119898 (120579)
(31)
Table 1 The different gPC choices for the polynomial expansions
Probability law of 120579 Expansion polynomials SupportGaussian Hermite (minusinfin +infin)
Uniform Legendre [119886 119887]
Beta Jacobi [119886 119887]
Gamma Laguerre [0 +infin)
Poisson Charlier N
Multiplying the above expression by an orthogonal ele-ment of the basis Φ
ℎ(120579) and integrating with respect to the
distribution of 120579
E120579
[
119872
sum
119898=0
119889
119889119905V119894119898
Φ119898 (120579) Φ
ℎ (120579)] = E120579
[
[
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119897119898=0119897 (119905) (V
119895119898minus V119894119898
) Φ119897 (120579) Φ
119898 (120579) Φℎ (120579)]
]
(32)
we find an explicit system of ODEs
119889
119889119905V119894ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172
119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
)
sdot
119872
sum
119897=0119897 (119905) 119890119897119898ℎ
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
) 119898ℎ (119905)
(33)
where 119890119897119898ℎ
= E120579[Φ119897(120579)Φ119898
(120579)Φℎ(120579)] and
119898ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172
119872
sum
119897=0119897 (119905) 119890119897119898ℎ
(34)
We recall that the gPC numerical approach preserves themean velocity of the alignment model (5) In fact from (33)follows
119873
sum
119894=1
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895119894=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) V119895119898
minus1119873
119873
sum
119895119894=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) V119894119898
= 0
(35)
thanks to the symmetry of119867 More generally it can be shownthat if
1119873
119873
sum
119894=1V119894 (120579 119905) = V (36)
Mathematical Problems in Engineering 5
whereV is time-independent then its gPC decomposition isalso mean-preserving since
1119873
119873
sum
119894=1
119872
sum
119898=0E120579
[V119894 (120579 119905) Φ
119898 (120579)] Φ119898 (120579)
=
119872
sum
119898=0E120579
[1119873
119873
sum
119894=1V119894 (120579 119905) Φ
119898 (120579)] Φ119898 (120579)
= V119872
sum
119898=0E120579
[1 sdot Φ119898 (120579)] Φ
119898 (120579) = V
(37)
Remark 3 The gPC approximation (33) can be derivedequivalently without expanding the kernel function 119870(120579 119905)In this way one obtains
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
) 119898ℎ
(38)
where now
119898ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[119870 (120579 119905) Φ119898
Φℎ] (39)
Note that since in general 119873 ≫ 119872 the overall computa-tional cost is 119874(119872119873
2)
4 Selective Control of the gPC Approximation
In order to stabilize the gPC approximation of the Cucker-Smale type model (1) with random inputs we introduce anadditional term which acts as control of the approximateddynamic More specifically we modify the approximation ofthe alignment model (1) by introducing a control term
ℎto
the ℎth component of its gPC approximation
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+ ℎ119876 (V119894ℎ
)
(40)
The control ℎis a solution of
ℎ
= arg minℎisinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894ℎ (119905) minus V
119889ℎ)2
119889119905
+]2
int
119879
0ℎ (119905)
2119889119905]
(41)
where we assume to have for each ℎ = 1 119872 abounded control
ℎhaving value in an admissible set U
119887sub
R119889 for example in the one-dimensional case we considerℎ
isin [119906ℎ119871
119906ℎ119877
] Parameter ] gt 0 is a regularization term
and (V1198890 V1198891 V119889119872) are the desired values for the gPC
coefficients For example
V119889ℎ
= E120579
[V119889Φℎ (120579)] = V
119889E [Φℎ (120579)]
=
V119889
ℎ = 0
0 ℎ = 1 119872
(42)
where V119889is a desired velocity
Moreover the controller action is weighted by a boundedfunction
119876 R119889
997888rarr R119889 (43)
Due to the dependence of the controller effect from thesingle agent velocity we refer to this approach as selectivecontrol see [22]
In order to tackle numerically the above problem whosedirect solution is prohibitively expansive for large numbers ofindividuals we make use of model predictive control (MPC)techniques also referred to as receding horizon strategy orinstantaneous control [23] These techniques have been usedin [8 9 22] in the case of deterministic alignment systems
41 Selective Model Predictive Control Let us split the timeinterval [0 119879] in time intervals of length Δ119905 with 119905
119899= 119899Δ119905
with 119899 = 0 minus 1 The basic idea of the model predictivecontrol approach is to consider a piecewise constant control
ℎ (119905) =
minus1sum
119899=0119899
ℎ120594[119905119899119905119899+1] (119905) (44)
In this way it is possible to determine the value of thecontrol
119899
ℎisin R119889 solving for a state V
119894ℎthe (reduced)
optimization problem
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905)) +
ℎ119876 (V119894ℎ (119905))
V119894ℎ
(119905119899) = V119894ℎ
119899
ℎ= argminℎisinU119887
int
119905119899+1
119905119899
1119873
sdot
119873
sum
119894=1(12
(V119894ℎ (119905) minus V
119889ℎ)2
+]2
ℎ (119905)
2) 119889119904
(45)
Given the control 119899
ℎon the time interval [119905
119899 119905119899+1
] we letV119894ℎ
evolve according to the dynamics
119889
119889119905V119894ℎ
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+ 119899
ℎ119876 (V119899119894ℎ
(119905))
(46)
6 Mathematical Problems in Engineering
in order to obtain the new state V119894ℎ
= V119894ℎ
(119905119899+1
) We againsolve (45) to obtain
119899+1ℎ
with the modified initial data andwe repeat this procedure until we reach Δ119905 = 119879
The reduced optimization problem implies a reduction ofthe complexity of the initial problem since it depends onlyon the single real-valued variable
119899
ℎ On the other hand the
price to pay is that in general the solution of the problem issuboptimal with respect to the full one ((40)-(41))
The quadratic cost and a suitable discretization of (46)allow an explicit representation of
119899
ℎin terms of V
119894ℎand V119899+1119894ℎ
as a feedback controlled system as follows
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
+ Δ119905119899
ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
119899
ℎ= minus
Δ119905
]119873
119873
sum
119894=1(V119899+1119894ℎ
minus V119889ℎ
) 119876119899
119894ℎ
(47)
where 119867119899
119894119895equiv 119867(119909
119899
119894 119909119899
119895) and 119876
119899
119894ℎequiv 119876(V119899
119894ℎ) Note that since
the feedback control 119899
ℎin (47) depends on the velocities at
time 119899 + 1 the constrained interaction at time 119899 is implicitlydefined The feedback controlled system in the discretizedform results in
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
minusΔ119905
2
]119873
119873
sum
119895=1(V119899+1119895ℎ
minus V119889ℎ
) 119876119899
119895ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
(48)
Again the action of the control is substituted by animplicit term representing the relaxation toward the desiredcomponent of the velocity V
119889ℎ and it can be inverted in a fully
explicit systemConsidering the scaling for the regularization parameter
] = 120581Δ119905 the previous scheme is a consistent discretization ofthe following continuous system
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
(49)
Now the control is explicitly embedded in the dynamic ofthe ℎth component of the gPC approximation as a feedbackterm and the parameter 120581 gt 0 determines its strength
42 Choice of the Selective Control For the specific choice ofweight function 119876(sdot) equiv 1 we refer in general to nonselectivecontrol Note that in this case the action of the control is notstrong enough to control the velocity of each agent indeed inthis case we are able only to control the mean velocity of thesystem In fact the control term is reduced to
1120581
(V119889ℎ
minus Vℎ) (50)
where Vℎis the ℎth coefficient of the expansion ofV that is
Vℎ
=1119873
119873
sum
119895=1V119895ℎ (119905) (51)
Then only the projections of themean velocity are steeredtoward the respective components of the target velocity thatis as soon as 120581 rarr 0 it follows that V
ℎ= V119889ℎ Therefore
the choice of the selective function 119876(sdot) is of paramountimportance to ensure the action of the control on the singleagent
In principle one can address directly the control problemon the original system (1) as
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119876 (V119894 (120579 119905))
(52)
where the control term 119906 is solution of
119906 = argmin119906isinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894 (120579 119905) minus V
119889)2
119889119905
+]2
int
119879
0119906 (119905)
2119889119905]
(53)
Here V119889
isin R119889 is a target velocity ] gt 0 a regularizationparameter andU
119887the set of admissible control Similarly to
previous subsection through the approach presented in [89 22] we can derive the time-continuous MPC formulationwhich explicitly embed the control term in the dynamic asfollows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905)
=119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+1
120581119873
119873
sum
119895=1(V119889
minus V119895 (120579 119905)) 119876 (V
119895 (119905 120579)) 119876 (V119894 (119905 120579))
(54)
Mathematical Problems in Engineering 7
Now the gPC approximation of (54) can be obtained as inSection 3 and leads to the set of ODEs
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1119877ℎ
(V119872119894
V119872119895
)
(55)
where
119877ℎ
(V119872119894
V119872119895
) =1
1003817100381710038171003817Φℎ
10038171003817100381710038172E120579 [(V
119889minus V119872119895
) 119876 (V119872119894
(120579 119905))
sdot 119876 (V119872119895
(120579 119905)) Φℎ (120579)]
(56)
In general systems (55) and (49) without further assump-tions on the selective function 119876(sdot) are not equivalent Inaddition to the nonselective case there exists at least onechoice of selective control that makes the two approachestotally interchangeable In fact taking
119876 (V119894) =
V119889
minus V119894
radic(1119873) sum119873
119895=1 (V119889
minus V119895)2 (57)
and 119876(V119894) equiv 0 if V
119895= V119889 forall119895 = 1 119873 we have that 119876(sdot)
is bounded and the control term in (55) takes the followingform
1120581119873
119873
sum
119895=1119877ℎ
=1
1205811003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[(V119889
minus V119872119894
(120579 119905)) Φℎ (120579)]
=1120581
(V119889ℎ
minus V119894ℎ
)
(58)
Similarly the control term in (49) reduces to
1120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
=1120581
(V119889ℎ
minus V119894ℎ
)
(59)
and therefore system (55) coincides with (49) Note that as120581 rarr 0 both systems are driven towards the controlled stateV119894ℎ
= V119889ℎ
which implies a strong control over each singleagent
In Figure 1 we summarize the two equivalent approachesIn the case of nonselective control and of selective func-tion given by (57) the constrained gPC system can beobtained from our initial unconstrained model (1) throughtwo different but equivalent methods The first approximatesthe solution of the Cucker-Smale type model via the gPCprojection and then introduces a control on the coefficientsof the decomposition through a MPC approach in order
Model
Control problem
MPC
gPC
gPC
Control problem
MPC
ConstrainedgPC system
Figure 1 Sketch of the two numerical approaches to solve thecontrol problemwith uncertainty combiningMPCand gPC In bothcases of nonselective control that is 119876(sdot) equiv 1 and of selectivecontrol with 119876(sdot) defined in (57) the two approaches are equivalent
to steer each component to (V1198890 V1198891 V119889119872) whereas
the second method considers a constrained Cucker-Smaleproblem (52) introduces its continuousMPC approximationand then computes the gPC expansion of the resulting systemof constrained differential equations
Remark 4 We remark that the choice of 119876(sdot) stated in(57) for which the two approaches sketched in Figure 1 areidentical is equivalent to consider the constrained dynamic(52) modified as follows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119894
(60)
where the control term119906119894 for each agent 119894 = 1 119873 is given
by the minimization of the following functional
119869 (V1 V119873 1199061 119906119873)
=12
int
119879
0
1119873
119873
sum
119894=1[(V119894 (120579 119905) minus V
119889)2
+]2
119906119894 (119905)
2] 119889119905
(61)
Since the functional is strictly convex applying the (MPC)procedure on a single time interval for the discretizeddynamic of (60)-(61) we obtain 119906
119894in terms of feedback
control
119906119894=1120581
(V119889
minus V119894) 119894 = 1 119873 (62)
8 Mathematical Problems in Engineering
Erro
r102
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus12
10minus14
10minus160 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(a)
Erro
r
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus120 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(b)
Figure 2 Error convergence for increasing number of polynomials in the gPC decomposition approximation (a) Convergence of the meanerror at two fixed times 119879 = 1 and 119879 = 5 (b) Convergence of the variance error In both cases we considered a random time-independentscattering 119870(120579 119905) = 120579 where the random variable 120579 is normally distributed 119873(2 12) The system of ODEs is solved through a 4th-orderRunge-Kutta with Δ119905 = 10minus5
0 05 1 15 2 25 3 35 4 45 5
0
1
2
3
4
5
6
7
Varia
nce
Exact
times10minus3
minus1
t
M = 3
M = 4
M = 5
(a)
Erro
r
t
M = 3
M = 4
M = 5
100
10minus5
10minus10
10minus150 05 1 15 2 25 3 35 4
(b)
Figure 3 Evolution of the variance error 1198641205902 (119905) defined in (63) for the gPC decomposition for the unconstrained model (5) with 119870(120579 119905) =
120579 sim N(2 12) over the time interval [0 119879] with 119879 = 5 and time step Δ119905 = 10minus5
Thus the same considerations on the equivalence of theapproaches hold
5 Numerical Tests
We present some numerical experiments of the behaviorof the flocking model in the case of a Hermite polynomialchaos expansion This choice corresponds to the assumption
of a normal distribution for the stochastic parameter inthe Cucker-Smale type equation (1) and in its constrainedbehavior (49) Numerical results show that the introducedselective control with the weight function (57) is capableof driving the velocity to a desired state even in case ofa dynamic dependent on a normally distributed randominput with fixed or time-dependent variance In the uniforminteraction case since the effect of agentsrsquo positions does not
Mathematical Problems in Engineering 9
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
Exact
M i
RK 4
(a)
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
M i
ExactRK 4
(b)
Figure 4 (a) Sixth-order Hermite gPC decomposition solved through a 4th-order Runge-Kutta (b) 10th-order Hermite gPC decompositionsolved through a 4th-order Runge-Kutta In both cases the final time considered is 119879 = 6 with time step Δ119905 = 10minus2
influence the alignment we report only the results of theagentsrsquo velocities
51 Unconstrained Case In Figures 2 and 3 we presentnumerical results for the convergence of the error using thegPC scheme described in (33) for119867 equiv 1 and solved through a4th-order Runge-Kutta method In particular Figure 2 showsthe behavior of the error with respect to increasing terms ofthe gPC decomposition Here we considered the average intime of the error for the mean and the variance at time 119905 gt 0in the 119871
1 norm
119864V (119905) =1119873
119873
sum
119894=1
100381610038161003816100381610038161003816100381610038161003816
V119894 (119905) minus V119872
119894(119905)
V119894 (119905)
100381610038161003816100381610038161003816100381610038161003816
1198641205902 (119905) =
1119873
119873
sum
119894=1
1003816100381610038161003816100381610038161003816100381610038161003816
1205902119894
(119905) minus 1205902119872119894
(119905)
1205902119894
(119905)
1003816100381610038161003816100381610038161003816100381610038161003816
(63)
where
1205902119894
(119905) = E120579
[(V119894 (120579 119905) minus V
119894 (119905))2] (64)
with V119894(120579 119905) and V
119894(119905) defined in (6) and (8) Observe that if
the scattering rate 119870(120579 119905) is of the from described in (7) withℎ(sdot) equiv 1 and 119896(120579) sim N(120583 120590
2) then in addition to the explicit
evolution for the expected velocity as in (9) we can obtain theexact version for the evolution of the variance of the 119894th agent
1205902119894
(119905) = (V119894 (0) minusV)
2
sdot (exp minus2120583119905 + 212059021199052 minus exp minus2120583119905 + 120590
21199052)
(65)
In (63) we indicated with 1205902119872119894
(119905) the approximatedvariance
1205902119872119894
(119905) =
119872
sum
ℎ=0V2119894ℎ
(119905)E120579 [Φℎ (120579)
2] minus V21198940 (119905) (66)
It is easily seen how the error decays spectrally forincreasing value of 119872 however the method is not capableof going above a certain accuracy and therefore for large 119872
a threshold effect is observed This can be explained by thelarge integration interval we have considered in the numericalcomputation and by the well-known loss of accuracy ofgPC for large times [19] In the case of the error of thevariance (Figure 3) the gPC approximation exhibits a slowerconvergence with respect to the convergence of the meanNext in Figure 4 we see how for large times the solutionof the differential equation (5) diverges and the numericalapproximation is capable of describing accurately its behavioronly through an increasing number of Hermite polynomials
52 Constrained Uniform Interaction Case In Figure 5 weshow different scenarios for the uniform interaction dynamicwith constraints In the first row we represent the solutionfor 119873 = 10 agents whose dynamic is described by (49) withV119889
= 1 different values of 120581 originate different controls onthe average of the system which however do not prevent thesystem from diverging In the second row we show the actionof selective control (57) It is evident that with this choicewe are able to control the system also in the case with highervariance
10 Mathematical Problems in Engineering
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(a)
0 1 2 3 4 5 6 7 8 9 1005
1
15
2
25
t
M i
Evolution with 120579 sim 119977(2 05)
120581 = infin
120581 = 1
120581 = 01
(b)
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(c)
0 1 2 3 4 5 6 7 8 9 10t
05
1
15
2
25
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 05)
(d)
Figure 5 Evolution of the uniform interaction alignment model (49) with 119873 = 10 agents at 119905 = 0 distributed around V = 2 with unitaryvariance depending on a normal random parameter Left column 120579 sim N(2 1) Right column 120579 sim N(2 05) The control term shows itsability to steer the system towards desired velocity V
119889= 1 with different intensities 120581 = 1 and 120581 = 01 when 120581 = infin the control has no
influence First row shows the action of the control acting just on the average velocity 119876 equiv 1 Second row shows the action of selective controlwith 119876(sdot) as in (57)
Observe that the numerical results are coherent with theexplicit solution of the controlled equation Let us considerthe time-independent scattering rate 119870(120579 119905) = 120579 sim N(120583 120590
2)
then from the equation
119889
119889119905V119894 (120579 119905) = 120579 (Vminus V
119894 (120579 119905)) +1120581
(V119889
minus V119894 (120579 119905)) (67)
we can compute the exact solution given V119894(120579 0) = V
119894(0)
V119894 (120579 119905)
=120581V120579 + V
119889
120581120579 + 1
+ (V119894 (0) minus
120581V120579 + V119889
120581120579 + 1) exp minus (120579 +
1120581
) 119905
(68)
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
approximation of the system Next in Section 5 we reportseveral numerical experiments which illustrate the differentfeatures of the numerical method Extensions of the presentapproach are finally discussed in Section 6
2 Cucker-Smale Dynamic withRandom Inputs
We introduce a Cucker-Smale type [10] differential systemdepending on a random variable 120579 isin Ω sube R with a givendistribution 119891(120579) Let (119909
119894 V119894) isin R2119889 119889 ge 1 evolving as
follows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
(1)
where 119870 is a time-dependent random function character-izing the uncertainty in the interaction rates and 119867(sdot sdot)
is a symmetric function describing the dependence of thealignment dynamic from the agents positions A classicalchoice of space-dependent interaction function is related tothe distance between two agents
119867 (119909 119910) =1
(1205772 +1003816100381610038161003816119909 minus 119910
10038161003816100381610038162)120574 (2)
where 120574 ge 0 and 120577 gt 0 are given parameters Mathematicalresults concerning the system behavior in the deterministiccase (119870 equiv 1) can be found in [10] In particular unconditionalalignment emerges for 120574 lt 12 Let us observe that even forthe model with random inputs (1) the mean velocity of thesystem is conserved in time
V (120579 119905) =1119873
119873
sum
119894=1V119894 (120579 119905)
119889
119889119905V (120579 119905) = 0
(3)
since the symmetry of 119867 implies
119873
sum
119894119895=1119867 (119909119894 119909119895) V119895 (120579 119905) =
119873
sum
119894119895=1119867 (119909119894 119909119895) V119894 (120579 119905) (4)
Therefore for each 119905 ge 0 we haveV(120579 119905) = V(120579 0)
21 The Uniform Interaction Case To better understandthe leading dynamic let us consider the simpler uniforminteraction case when 119867 equiv 1 leading to the followingequation for the velocities
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1(V119895 (120579 119905) minus V
119894 (120579 119905))
= 119870 (120579 119905) (V (120579 0) minus V119894 (120579 119905))
(5)
The differential equation (5) admits an exact solutiondepending on the random input 120579More precisely if the initialvelocities are deterministically known we have that
V119894 (120579 119905) = V+ (V
119894 (0) minusV) expminus int
119905
0119870 (120579 119904) 119889119904 (6)
whereV = V(0) is the mean velocity of the system In whatfollows we analyze the evolution of (6) for different choices of119870(120579 119905) and of the distribution of the random variable 120579
Example 1 Let us consider a random scattering rate writtenin terms of the following decomposition
119870 (120579 119905) = 119896 (120579) ℎ (119905) (7)
where ℎ(119905) is a nonnegative function depending on 119905 isin R+The expected velocity of the 119894th agent is defined by
V119894 (119905) = E
120579[V119894 (120579 119905)] = int
Ω
V119894 (120579 119905) 119891 (120579) 119889120579 (8)
Then each agent evolves its expected velocity according to
V119894 (119905)
= intΩ
[V+ (V119894 (0) minusV) expminus119896 (120579) int
119905
0ℎ (119904) 119889119904]
sdot 119891 (120579) 119889120579
(9)
For example let us choose 119896(120579) = 120579 where the randomvariable is normally distributed that is 120579 sim N(120583 120590
2) Then
for each 119894 = 1 119873 we need to evaluate the followingintegral
V+V119894 (0) minus V
radic21205871205902
sdot intR
expminus120579 int
119905
0ℎ (119904) 119889119904 expminus
(120579 minus 120583)2
21205902 119889120579
(10)
The explicit form is easily found through standard tech-niques and yields
V119894 (119905) = V+ (V
119894 (0) minusV)
sdot expminus120583 int
119905
0ℎ (119904) 119889119904 +
1205902
2(int
119905
0ℎ (119904) 119889119904)
2
(11)
From (11) we observe a threshold effect in the asymptoticconvergence of the mean velocity of each agent towardV Itis immediately seen that if
int
119905
0ℎ (119904) 119889119904 gt
2120583
1205902 (12)
it follows that for 119905 rarr +infin the expected velocity V119894diverges
In particular if ℎ(119904) equiv 1 we have that the solution starts todiverge as soon as 119905 gt 120583120590
2 Note that this threshold effect isessential due to the negative tail of the normal distribution
Mathematical Problems in Engineering 3
In fact if we now consider a random variable taking onlynonnegative values for example exponentially distributed120579 sim Exp(120582) for some positive parameter 120582 gt 0 from (9) weobtain
V119894 (119905) = V+ (V
119894 (0) minusV) int
+infin
0119890minus120579119905
120582119890minus120582120579
119889120579 (13)
which corresponds to
V119894 (119905) = V+ (V
119894 (0) minusV)120582
119905 + 120582 (14)
and therefore V119894(119905) rarr V as 119905 rarr infin Then independently
from the choice of the rate 120582 gt 0 we obtain for each agentconvergences toward the average initial velocity of the systemFinally in case of a uniform random variable 120579 sim 119880([119886 119887])weobtain
V119894 (119905) = V+ (V
119894 (0) minusV) int
119887
119886
1119887 minus 119886
119890minus120579119905
119889120579 (15)
that is
V119894 (119905) = V+
V119894 (0) minus V
119887 minus 119886(
119890minus119886119905
119905minus
119890minus119887119905
119905) (16)
which implies the divergence of the system in time as soon as119886 isin R assumes negative values
Example 2 Next we consider a random scattering rate withtime-dependent distribution function that is
119870 (120579 119905) = 120579 (119905) (17)
with 120579(119905) sim 119891(120579 119905) As an example we investigate thecase of a normally distributed random parameter with givenmean and time-dependent variance 120579 sim N(120583 120590
2(119905)) It is
straightforward to rewrite 120579 as a translation of a standardnormal-distributed variable 120579 that is
120579 = 120583 + 120590 (119905) 120579 (18)
where 120579 sim N(0 1) The expected velocities read
V119894 (119905) = V+
(V119894 (0) minus V)
radic2120587
sdot intR
expminus120583119905 minus 120579 int
119905
0120590 (119904) 119889119904 expminus
1205792
2 119889120579
(19)
which correspond to
V119894 (119905)
= V
+ (V119894 (0) minusV) expminus120583119905 +
12
(int
119905
0120590 (119904) 119889119904)
2
(20)
Similarly to the case of a time-independent normalvariable a threshold effect occurs for large times that is thefollowing condition on the variance of the distribution
(int
119905
0120590 (119904) 119889119904)
2gt 2120583119905 (21)
implies the divergence of system (5) As a consequenceinstability can be avoided by assuming a variance decreasingsufficiently fast in timeThe simplest choice is represented by120590(119905) = 1119905
120572 for some 120572 isin [12 1) Condition (21) becomes
(1199051minus120572
1 minus 120572)
2
gt 2120583119905 (22)
For example if 120572 = 12 the previous condition impliesthat the system diverges for each 120583 lt 2
3 A gPC Based Numerical Approach
In this section we approximate the Cucker-Smale modelwith random inputs using a generalized polynomial chaosapproach For the sake of claritywe first recall somebasic factsconcerning gPC approximations
31 Preliminaries on gPC Approximations Let (ΩF 119875) be aprobability space that is an ordered triple with Ω any setFa 120590-algebra and 119875 F rarr [0 1] a probability measure onFwhere we define a random variable
120579 (ΩF) 997888rarr (RBR) (23)
with BR the Borel set of R Moreover let us consider 119878 sub
R119889 119889 ge 1 and [0 119879] sub R certain spatial and temporalsubsets For the sake of simplicity we focus on real-valuedfunctions depending on a single random input
119892 (119909 120579 119905) 119878 times Ω times 119879 997888rarr R119889 119892 isin 119871
2(ΩF 119875) (24)
In any case it is possible to extend the setup of theproblem to a 119901-dimensional vector of random variables 120579 =
(1205791 120579119901) see [19] Let us consider now the linear spaceof polynomials of 120579 of degree up to 119872 namely P
119872(120579)
From classical results in approximation theory it is possibleto represent the distribution of random functions withorthogonal polynomials Φ
119896(120579)119872
119896=0 that is an orthogonalbasis of 119871
2(ΩF 119875)
E120579
[Φℎ (120579) Φ
119896 (120579)] = E120579
[Φℎ (120579)
2] 120575ℎ119896
(25)
with 120575ℎ119896
as the Kronecker delta function Assuming thatthe probability law 119875(120579
minus1(119861)) forall119861 isin BR involved in the
definition of the introduced function 119892(119909 120579 119905) has finitesecond-order moment then the complete polynomial chaosexpansion of 119892 is given by
119892 (119909 120579 119905) = sum
119898isinN
119892119898 (119909 119905) Φ
119898 (120579) (26)
4 Mathematical Problems in Engineering
According to the Cameron-Martin theorem and to theAskey scheme results that pave a connection between ran-dom variables and orthogonal polynomials [18 20 21] wechose a set of polynomials which constitutes the optimal basiswith respect to the distribution of the introduced randomvariable in agreement with Table 1
Let us consider now a general formulation for a randomlyperturbed problem
D (119909 119905 120579 119892) = 119891 (119909 119905 120579) (27)
where we indicated withD a differential operator In generalthe randomness introduced in the problem by 120579 acts as aperturbation ofD of the function 119892 or occurs as uncertaintyof the initial conditions In this work we focus on the firsttwo aspects assuming that initial positions and velocities aredeterministically known
The generalized polynomial chaos method approximatesthe solution 119892(119909 120579 119905) of (27) with its 119872th-order polynomialchaos expansion and considers the Galerkin projections ofthe introduced differential problem that is
E120579
[D (119909 119905 120579 119892) sdot Φℎ (120579)] = E
120579[119891 (119909 120579 119905) sdot Φ
ℎ (120579)]
ℎ = 0 1 119872
(28)
Due to the Galerkin orthogonality between the linearspace P
119872and the error produced in the representation of
119892(119909 120579 119905) with a truncated series from (28) we obtain a set of119872 + 1 purely deterministic equations for the expansion coef-ficients 119892
119898(119909 119905) These subproblems can be solved through
classical discretization techniques From the numerical pointof view through a gPC-type method it is possible to achievean exponential order of convergence to the exact solution ofthe problem unlike Monte Carlo techniques for which theorder is 119874(1radic119872) where 119872 is the number of samples
32 gPC Approximation of the Alignment Model We applythe described gPC decomposition to the solution of thenonhomogeneous differential equation V
119894(120579 119905) in (6) and to
the stochastic scattering rate 119870(120579 119905) that is
V119872119894
(120579 119905) =
119872
sum
119898=0V119894119898 (119905) Φ
119898 (120579)
119870119872
(120579 119905) =
119872
sum
119897=0119897 (119905) Φ
119897 (120579)
(29)
whereV119894119898 (119905) = E
120579[V119894 (120579 119905) Φ
119898 (120579)]
119897 (119905) = E
120579[119870 (120579 119905) Φ
119897 (120579)]
(30)
We obtain the following polynomial chaos expansion
119889
119889119905
119872
sum
119898=0V119894119898
Φ119898 (120579) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119897119898=0119897 (119905) (V
119895119898minus V119894119898
) Φ119897 (120579) Φ
119898 (120579)
(31)
Table 1 The different gPC choices for the polynomial expansions
Probability law of 120579 Expansion polynomials SupportGaussian Hermite (minusinfin +infin)
Uniform Legendre [119886 119887]
Beta Jacobi [119886 119887]
Gamma Laguerre [0 +infin)
Poisson Charlier N
Multiplying the above expression by an orthogonal ele-ment of the basis Φ
ℎ(120579) and integrating with respect to the
distribution of 120579
E120579
[
119872
sum
119898=0
119889
119889119905V119894119898
Φ119898 (120579) Φ
ℎ (120579)] = E120579
[
[
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119897119898=0119897 (119905) (V
119895119898minus V119894119898
) Φ119897 (120579) Φ
119898 (120579) Φℎ (120579)]
]
(32)
we find an explicit system of ODEs
119889
119889119905V119894ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172
119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
)
sdot
119872
sum
119897=0119897 (119905) 119890119897119898ℎ
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
) 119898ℎ (119905)
(33)
where 119890119897119898ℎ
= E120579[Φ119897(120579)Φ119898
(120579)Φℎ(120579)] and
119898ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172
119872
sum
119897=0119897 (119905) 119890119897119898ℎ
(34)
We recall that the gPC numerical approach preserves themean velocity of the alignment model (5) In fact from (33)follows
119873
sum
119894=1
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895119894=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) V119895119898
minus1119873
119873
sum
119895119894=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) V119894119898
= 0
(35)
thanks to the symmetry of119867 More generally it can be shownthat if
1119873
119873
sum
119894=1V119894 (120579 119905) = V (36)
Mathematical Problems in Engineering 5
whereV is time-independent then its gPC decomposition isalso mean-preserving since
1119873
119873
sum
119894=1
119872
sum
119898=0E120579
[V119894 (120579 119905) Φ
119898 (120579)] Φ119898 (120579)
=
119872
sum
119898=0E120579
[1119873
119873
sum
119894=1V119894 (120579 119905) Φ
119898 (120579)] Φ119898 (120579)
= V119872
sum
119898=0E120579
[1 sdot Φ119898 (120579)] Φ
119898 (120579) = V
(37)
Remark 3 The gPC approximation (33) can be derivedequivalently without expanding the kernel function 119870(120579 119905)In this way one obtains
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
) 119898ℎ
(38)
where now
119898ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[119870 (120579 119905) Φ119898
Φℎ] (39)
Note that since in general 119873 ≫ 119872 the overall computa-tional cost is 119874(119872119873
2)
4 Selective Control of the gPC Approximation
In order to stabilize the gPC approximation of the Cucker-Smale type model (1) with random inputs we introduce anadditional term which acts as control of the approximateddynamic More specifically we modify the approximation ofthe alignment model (1) by introducing a control term
ℎto
the ℎth component of its gPC approximation
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+ ℎ119876 (V119894ℎ
)
(40)
The control ℎis a solution of
ℎ
= arg minℎisinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894ℎ (119905) minus V
119889ℎ)2
119889119905
+]2
int
119879
0ℎ (119905)
2119889119905]
(41)
where we assume to have for each ℎ = 1 119872 abounded control
ℎhaving value in an admissible set U
119887sub
R119889 for example in the one-dimensional case we considerℎ
isin [119906ℎ119871
119906ℎ119877
] Parameter ] gt 0 is a regularization term
and (V1198890 V1198891 V119889119872) are the desired values for the gPC
coefficients For example
V119889ℎ
= E120579
[V119889Φℎ (120579)] = V
119889E [Φℎ (120579)]
=
V119889
ℎ = 0
0 ℎ = 1 119872
(42)
where V119889is a desired velocity
Moreover the controller action is weighted by a boundedfunction
119876 R119889
997888rarr R119889 (43)
Due to the dependence of the controller effect from thesingle agent velocity we refer to this approach as selectivecontrol see [22]
In order to tackle numerically the above problem whosedirect solution is prohibitively expansive for large numbers ofindividuals we make use of model predictive control (MPC)techniques also referred to as receding horizon strategy orinstantaneous control [23] These techniques have been usedin [8 9 22] in the case of deterministic alignment systems
41 Selective Model Predictive Control Let us split the timeinterval [0 119879] in time intervals of length Δ119905 with 119905
119899= 119899Δ119905
with 119899 = 0 minus 1 The basic idea of the model predictivecontrol approach is to consider a piecewise constant control
ℎ (119905) =
minus1sum
119899=0119899
ℎ120594[119905119899119905119899+1] (119905) (44)
In this way it is possible to determine the value of thecontrol
119899
ℎisin R119889 solving for a state V
119894ℎthe (reduced)
optimization problem
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905)) +
ℎ119876 (V119894ℎ (119905))
V119894ℎ
(119905119899) = V119894ℎ
119899
ℎ= argminℎisinU119887
int
119905119899+1
119905119899
1119873
sdot
119873
sum
119894=1(12
(V119894ℎ (119905) minus V
119889ℎ)2
+]2
ℎ (119905)
2) 119889119904
(45)
Given the control 119899
ℎon the time interval [119905
119899 119905119899+1
] we letV119894ℎ
evolve according to the dynamics
119889
119889119905V119894ℎ
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+ 119899
ℎ119876 (V119899119894ℎ
(119905))
(46)
6 Mathematical Problems in Engineering
in order to obtain the new state V119894ℎ
= V119894ℎ
(119905119899+1
) We againsolve (45) to obtain
119899+1ℎ
with the modified initial data andwe repeat this procedure until we reach Δ119905 = 119879
The reduced optimization problem implies a reduction ofthe complexity of the initial problem since it depends onlyon the single real-valued variable
119899
ℎ On the other hand the
price to pay is that in general the solution of the problem issuboptimal with respect to the full one ((40)-(41))
The quadratic cost and a suitable discretization of (46)allow an explicit representation of
119899
ℎin terms of V
119894ℎand V119899+1119894ℎ
as a feedback controlled system as follows
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
+ Δ119905119899
ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
119899
ℎ= minus
Δ119905
]119873
119873
sum
119894=1(V119899+1119894ℎ
minus V119889ℎ
) 119876119899
119894ℎ
(47)
where 119867119899
119894119895equiv 119867(119909
119899
119894 119909119899
119895) and 119876
119899
119894ℎequiv 119876(V119899
119894ℎ) Note that since
the feedback control 119899
ℎin (47) depends on the velocities at
time 119899 + 1 the constrained interaction at time 119899 is implicitlydefined The feedback controlled system in the discretizedform results in
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
minusΔ119905
2
]119873
119873
sum
119895=1(V119899+1119895ℎ
minus V119889ℎ
) 119876119899
119895ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
(48)
Again the action of the control is substituted by animplicit term representing the relaxation toward the desiredcomponent of the velocity V
119889ℎ and it can be inverted in a fully
explicit systemConsidering the scaling for the regularization parameter
] = 120581Δ119905 the previous scheme is a consistent discretization ofthe following continuous system
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
(49)
Now the control is explicitly embedded in the dynamic ofthe ℎth component of the gPC approximation as a feedbackterm and the parameter 120581 gt 0 determines its strength
42 Choice of the Selective Control For the specific choice ofweight function 119876(sdot) equiv 1 we refer in general to nonselectivecontrol Note that in this case the action of the control is notstrong enough to control the velocity of each agent indeed inthis case we are able only to control the mean velocity of thesystem In fact the control term is reduced to
1120581
(V119889ℎ
minus Vℎ) (50)
where Vℎis the ℎth coefficient of the expansion ofV that is
Vℎ
=1119873
119873
sum
119895=1V119895ℎ (119905) (51)
Then only the projections of themean velocity are steeredtoward the respective components of the target velocity thatis as soon as 120581 rarr 0 it follows that V
ℎ= V119889ℎ Therefore
the choice of the selective function 119876(sdot) is of paramountimportance to ensure the action of the control on the singleagent
In principle one can address directly the control problemon the original system (1) as
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119876 (V119894 (120579 119905))
(52)
where the control term 119906 is solution of
119906 = argmin119906isinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894 (120579 119905) minus V
119889)2
119889119905
+]2
int
119879
0119906 (119905)
2119889119905]
(53)
Here V119889
isin R119889 is a target velocity ] gt 0 a regularizationparameter andU
119887the set of admissible control Similarly to
previous subsection through the approach presented in [89 22] we can derive the time-continuous MPC formulationwhich explicitly embed the control term in the dynamic asfollows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905)
=119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+1
120581119873
119873
sum
119895=1(V119889
minus V119895 (120579 119905)) 119876 (V
119895 (119905 120579)) 119876 (V119894 (119905 120579))
(54)
Mathematical Problems in Engineering 7
Now the gPC approximation of (54) can be obtained as inSection 3 and leads to the set of ODEs
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1119877ℎ
(V119872119894
V119872119895
)
(55)
where
119877ℎ
(V119872119894
V119872119895
) =1
1003817100381710038171003817Φℎ
10038171003817100381710038172E120579 [(V
119889minus V119872119895
) 119876 (V119872119894
(120579 119905))
sdot 119876 (V119872119895
(120579 119905)) Φℎ (120579)]
(56)
In general systems (55) and (49) without further assump-tions on the selective function 119876(sdot) are not equivalent Inaddition to the nonselective case there exists at least onechoice of selective control that makes the two approachestotally interchangeable In fact taking
119876 (V119894) =
V119889
minus V119894
radic(1119873) sum119873
119895=1 (V119889
minus V119895)2 (57)
and 119876(V119894) equiv 0 if V
119895= V119889 forall119895 = 1 119873 we have that 119876(sdot)
is bounded and the control term in (55) takes the followingform
1120581119873
119873
sum
119895=1119877ℎ
=1
1205811003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[(V119889
minus V119872119894
(120579 119905)) Φℎ (120579)]
=1120581
(V119889ℎ
minus V119894ℎ
)
(58)
Similarly the control term in (49) reduces to
1120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
=1120581
(V119889ℎ
minus V119894ℎ
)
(59)
and therefore system (55) coincides with (49) Note that as120581 rarr 0 both systems are driven towards the controlled stateV119894ℎ
= V119889ℎ
which implies a strong control over each singleagent
In Figure 1 we summarize the two equivalent approachesIn the case of nonselective control and of selective func-tion given by (57) the constrained gPC system can beobtained from our initial unconstrained model (1) throughtwo different but equivalent methods The first approximatesthe solution of the Cucker-Smale type model via the gPCprojection and then introduces a control on the coefficientsof the decomposition through a MPC approach in order
Model
Control problem
MPC
gPC
gPC
Control problem
MPC
ConstrainedgPC system
Figure 1 Sketch of the two numerical approaches to solve thecontrol problemwith uncertainty combiningMPCand gPC In bothcases of nonselective control that is 119876(sdot) equiv 1 and of selectivecontrol with 119876(sdot) defined in (57) the two approaches are equivalent
to steer each component to (V1198890 V1198891 V119889119872) whereas
the second method considers a constrained Cucker-Smaleproblem (52) introduces its continuousMPC approximationand then computes the gPC expansion of the resulting systemof constrained differential equations
Remark 4 We remark that the choice of 119876(sdot) stated in(57) for which the two approaches sketched in Figure 1 areidentical is equivalent to consider the constrained dynamic(52) modified as follows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119894
(60)
where the control term119906119894 for each agent 119894 = 1 119873 is given
by the minimization of the following functional
119869 (V1 V119873 1199061 119906119873)
=12
int
119879
0
1119873
119873
sum
119894=1[(V119894 (120579 119905) minus V
119889)2
+]2
119906119894 (119905)
2] 119889119905
(61)
Since the functional is strictly convex applying the (MPC)procedure on a single time interval for the discretizeddynamic of (60)-(61) we obtain 119906
119894in terms of feedback
control
119906119894=1120581
(V119889
minus V119894) 119894 = 1 119873 (62)
8 Mathematical Problems in Engineering
Erro
r102
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus12
10minus14
10minus160 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(a)
Erro
r
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus120 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(b)
Figure 2 Error convergence for increasing number of polynomials in the gPC decomposition approximation (a) Convergence of the meanerror at two fixed times 119879 = 1 and 119879 = 5 (b) Convergence of the variance error In both cases we considered a random time-independentscattering 119870(120579 119905) = 120579 where the random variable 120579 is normally distributed 119873(2 12) The system of ODEs is solved through a 4th-orderRunge-Kutta with Δ119905 = 10minus5
0 05 1 15 2 25 3 35 4 45 5
0
1
2
3
4
5
6
7
Varia
nce
Exact
times10minus3
minus1
t
M = 3
M = 4
M = 5
(a)
Erro
r
t
M = 3
M = 4
M = 5
100
10minus5
10minus10
10minus150 05 1 15 2 25 3 35 4
(b)
Figure 3 Evolution of the variance error 1198641205902 (119905) defined in (63) for the gPC decomposition for the unconstrained model (5) with 119870(120579 119905) =
120579 sim N(2 12) over the time interval [0 119879] with 119879 = 5 and time step Δ119905 = 10minus5
Thus the same considerations on the equivalence of theapproaches hold
5 Numerical Tests
We present some numerical experiments of the behaviorof the flocking model in the case of a Hermite polynomialchaos expansion This choice corresponds to the assumption
of a normal distribution for the stochastic parameter inthe Cucker-Smale type equation (1) and in its constrainedbehavior (49) Numerical results show that the introducedselective control with the weight function (57) is capableof driving the velocity to a desired state even in case ofa dynamic dependent on a normally distributed randominput with fixed or time-dependent variance In the uniforminteraction case since the effect of agentsrsquo positions does not
Mathematical Problems in Engineering 9
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
Exact
M i
RK 4
(a)
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
M i
ExactRK 4
(b)
Figure 4 (a) Sixth-order Hermite gPC decomposition solved through a 4th-order Runge-Kutta (b) 10th-order Hermite gPC decompositionsolved through a 4th-order Runge-Kutta In both cases the final time considered is 119879 = 6 with time step Δ119905 = 10minus2
influence the alignment we report only the results of theagentsrsquo velocities
51 Unconstrained Case In Figures 2 and 3 we presentnumerical results for the convergence of the error using thegPC scheme described in (33) for119867 equiv 1 and solved through a4th-order Runge-Kutta method In particular Figure 2 showsthe behavior of the error with respect to increasing terms ofthe gPC decomposition Here we considered the average intime of the error for the mean and the variance at time 119905 gt 0in the 119871
1 norm
119864V (119905) =1119873
119873
sum
119894=1
100381610038161003816100381610038161003816100381610038161003816
V119894 (119905) minus V119872
119894(119905)
V119894 (119905)
100381610038161003816100381610038161003816100381610038161003816
1198641205902 (119905) =
1119873
119873
sum
119894=1
1003816100381610038161003816100381610038161003816100381610038161003816
1205902119894
(119905) minus 1205902119872119894
(119905)
1205902119894
(119905)
1003816100381610038161003816100381610038161003816100381610038161003816
(63)
where
1205902119894
(119905) = E120579
[(V119894 (120579 119905) minus V
119894 (119905))2] (64)
with V119894(120579 119905) and V
119894(119905) defined in (6) and (8) Observe that if
the scattering rate 119870(120579 119905) is of the from described in (7) withℎ(sdot) equiv 1 and 119896(120579) sim N(120583 120590
2) then in addition to the explicit
evolution for the expected velocity as in (9) we can obtain theexact version for the evolution of the variance of the 119894th agent
1205902119894
(119905) = (V119894 (0) minusV)
2
sdot (exp minus2120583119905 + 212059021199052 minus exp minus2120583119905 + 120590
21199052)
(65)
In (63) we indicated with 1205902119872119894
(119905) the approximatedvariance
1205902119872119894
(119905) =
119872
sum
ℎ=0V2119894ℎ
(119905)E120579 [Φℎ (120579)
2] minus V21198940 (119905) (66)
It is easily seen how the error decays spectrally forincreasing value of 119872 however the method is not capableof going above a certain accuracy and therefore for large 119872
a threshold effect is observed This can be explained by thelarge integration interval we have considered in the numericalcomputation and by the well-known loss of accuracy ofgPC for large times [19] In the case of the error of thevariance (Figure 3) the gPC approximation exhibits a slowerconvergence with respect to the convergence of the meanNext in Figure 4 we see how for large times the solutionof the differential equation (5) diverges and the numericalapproximation is capable of describing accurately its behavioronly through an increasing number of Hermite polynomials
52 Constrained Uniform Interaction Case In Figure 5 weshow different scenarios for the uniform interaction dynamicwith constraints In the first row we represent the solutionfor 119873 = 10 agents whose dynamic is described by (49) withV119889
= 1 different values of 120581 originate different controls onthe average of the system which however do not prevent thesystem from diverging In the second row we show the actionof selective control (57) It is evident that with this choicewe are able to control the system also in the case with highervariance
10 Mathematical Problems in Engineering
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(a)
0 1 2 3 4 5 6 7 8 9 1005
1
15
2
25
t
M i
Evolution with 120579 sim 119977(2 05)
120581 = infin
120581 = 1
120581 = 01
(b)
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(c)
0 1 2 3 4 5 6 7 8 9 10t
05
1
15
2
25
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 05)
(d)
Figure 5 Evolution of the uniform interaction alignment model (49) with 119873 = 10 agents at 119905 = 0 distributed around V = 2 with unitaryvariance depending on a normal random parameter Left column 120579 sim N(2 1) Right column 120579 sim N(2 05) The control term shows itsability to steer the system towards desired velocity V
119889= 1 with different intensities 120581 = 1 and 120581 = 01 when 120581 = infin the control has no
influence First row shows the action of the control acting just on the average velocity 119876 equiv 1 Second row shows the action of selective controlwith 119876(sdot) as in (57)
Observe that the numerical results are coherent with theexplicit solution of the controlled equation Let us considerthe time-independent scattering rate 119870(120579 119905) = 120579 sim N(120583 120590
2)
then from the equation
119889
119889119905V119894 (120579 119905) = 120579 (Vminus V
119894 (120579 119905)) +1120581
(V119889
minus V119894 (120579 119905)) (67)
we can compute the exact solution given V119894(120579 0) = V
119894(0)
V119894 (120579 119905)
=120581V120579 + V
119889
120581120579 + 1
+ (V119894 (0) minus
120581V120579 + V119889
120581120579 + 1) exp minus (120579 +
1120581
) 119905
(68)
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
In fact if we now consider a random variable taking onlynonnegative values for example exponentially distributed120579 sim Exp(120582) for some positive parameter 120582 gt 0 from (9) weobtain
V119894 (119905) = V+ (V
119894 (0) minusV) int
+infin
0119890minus120579119905
120582119890minus120582120579
119889120579 (13)
which corresponds to
V119894 (119905) = V+ (V
119894 (0) minusV)120582
119905 + 120582 (14)
and therefore V119894(119905) rarr V as 119905 rarr infin Then independently
from the choice of the rate 120582 gt 0 we obtain for each agentconvergences toward the average initial velocity of the systemFinally in case of a uniform random variable 120579 sim 119880([119886 119887])weobtain
V119894 (119905) = V+ (V
119894 (0) minusV) int
119887
119886
1119887 minus 119886
119890minus120579119905
119889120579 (15)
that is
V119894 (119905) = V+
V119894 (0) minus V
119887 minus 119886(
119890minus119886119905
119905minus
119890minus119887119905
119905) (16)
which implies the divergence of the system in time as soon as119886 isin R assumes negative values
Example 2 Next we consider a random scattering rate withtime-dependent distribution function that is
119870 (120579 119905) = 120579 (119905) (17)
with 120579(119905) sim 119891(120579 119905) As an example we investigate thecase of a normally distributed random parameter with givenmean and time-dependent variance 120579 sim N(120583 120590
2(119905)) It is
straightforward to rewrite 120579 as a translation of a standardnormal-distributed variable 120579 that is
120579 = 120583 + 120590 (119905) 120579 (18)
where 120579 sim N(0 1) The expected velocities read
V119894 (119905) = V+
(V119894 (0) minus V)
radic2120587
sdot intR
expminus120583119905 minus 120579 int
119905
0120590 (119904) 119889119904 expminus
1205792
2 119889120579
(19)
which correspond to
V119894 (119905)
= V
+ (V119894 (0) minusV) expminus120583119905 +
12
(int
119905
0120590 (119904) 119889119904)
2
(20)
Similarly to the case of a time-independent normalvariable a threshold effect occurs for large times that is thefollowing condition on the variance of the distribution
(int
119905
0120590 (119904) 119889119904)
2gt 2120583119905 (21)
implies the divergence of system (5) As a consequenceinstability can be avoided by assuming a variance decreasingsufficiently fast in timeThe simplest choice is represented by120590(119905) = 1119905
120572 for some 120572 isin [12 1) Condition (21) becomes
(1199051minus120572
1 minus 120572)
2
gt 2120583119905 (22)
For example if 120572 = 12 the previous condition impliesthat the system diverges for each 120583 lt 2
3 A gPC Based Numerical Approach
In this section we approximate the Cucker-Smale modelwith random inputs using a generalized polynomial chaosapproach For the sake of claritywe first recall somebasic factsconcerning gPC approximations
31 Preliminaries on gPC Approximations Let (ΩF 119875) be aprobability space that is an ordered triple with Ω any setFa 120590-algebra and 119875 F rarr [0 1] a probability measure onFwhere we define a random variable
120579 (ΩF) 997888rarr (RBR) (23)
with BR the Borel set of R Moreover let us consider 119878 sub
R119889 119889 ge 1 and [0 119879] sub R certain spatial and temporalsubsets For the sake of simplicity we focus on real-valuedfunctions depending on a single random input
119892 (119909 120579 119905) 119878 times Ω times 119879 997888rarr R119889 119892 isin 119871
2(ΩF 119875) (24)
In any case it is possible to extend the setup of theproblem to a 119901-dimensional vector of random variables 120579 =
(1205791 120579119901) see [19] Let us consider now the linear spaceof polynomials of 120579 of degree up to 119872 namely P
119872(120579)
From classical results in approximation theory it is possibleto represent the distribution of random functions withorthogonal polynomials Φ
119896(120579)119872
119896=0 that is an orthogonalbasis of 119871
2(ΩF 119875)
E120579
[Φℎ (120579) Φ
119896 (120579)] = E120579
[Φℎ (120579)
2] 120575ℎ119896
(25)
with 120575ℎ119896
as the Kronecker delta function Assuming thatthe probability law 119875(120579
minus1(119861)) forall119861 isin BR involved in the
definition of the introduced function 119892(119909 120579 119905) has finitesecond-order moment then the complete polynomial chaosexpansion of 119892 is given by
119892 (119909 120579 119905) = sum
119898isinN
119892119898 (119909 119905) Φ
119898 (120579) (26)
4 Mathematical Problems in Engineering
According to the Cameron-Martin theorem and to theAskey scheme results that pave a connection between ran-dom variables and orthogonal polynomials [18 20 21] wechose a set of polynomials which constitutes the optimal basiswith respect to the distribution of the introduced randomvariable in agreement with Table 1
Let us consider now a general formulation for a randomlyperturbed problem
D (119909 119905 120579 119892) = 119891 (119909 119905 120579) (27)
where we indicated withD a differential operator In generalthe randomness introduced in the problem by 120579 acts as aperturbation ofD of the function 119892 or occurs as uncertaintyof the initial conditions In this work we focus on the firsttwo aspects assuming that initial positions and velocities aredeterministically known
The generalized polynomial chaos method approximatesthe solution 119892(119909 120579 119905) of (27) with its 119872th-order polynomialchaos expansion and considers the Galerkin projections ofthe introduced differential problem that is
E120579
[D (119909 119905 120579 119892) sdot Φℎ (120579)] = E
120579[119891 (119909 120579 119905) sdot Φ
ℎ (120579)]
ℎ = 0 1 119872
(28)
Due to the Galerkin orthogonality between the linearspace P
119872and the error produced in the representation of
119892(119909 120579 119905) with a truncated series from (28) we obtain a set of119872 + 1 purely deterministic equations for the expansion coef-ficients 119892
119898(119909 119905) These subproblems can be solved through
classical discretization techniques From the numerical pointof view through a gPC-type method it is possible to achievean exponential order of convergence to the exact solution ofthe problem unlike Monte Carlo techniques for which theorder is 119874(1radic119872) where 119872 is the number of samples
32 gPC Approximation of the Alignment Model We applythe described gPC decomposition to the solution of thenonhomogeneous differential equation V
119894(120579 119905) in (6) and to
the stochastic scattering rate 119870(120579 119905) that is
V119872119894
(120579 119905) =
119872
sum
119898=0V119894119898 (119905) Φ
119898 (120579)
119870119872
(120579 119905) =
119872
sum
119897=0119897 (119905) Φ
119897 (120579)
(29)
whereV119894119898 (119905) = E
120579[V119894 (120579 119905) Φ
119898 (120579)]
119897 (119905) = E
120579[119870 (120579 119905) Φ
119897 (120579)]
(30)
We obtain the following polynomial chaos expansion
119889
119889119905
119872
sum
119898=0V119894119898
Φ119898 (120579) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119897119898=0119897 (119905) (V
119895119898minus V119894119898
) Φ119897 (120579) Φ
119898 (120579)
(31)
Table 1 The different gPC choices for the polynomial expansions
Probability law of 120579 Expansion polynomials SupportGaussian Hermite (minusinfin +infin)
Uniform Legendre [119886 119887]
Beta Jacobi [119886 119887]
Gamma Laguerre [0 +infin)
Poisson Charlier N
Multiplying the above expression by an orthogonal ele-ment of the basis Φ
ℎ(120579) and integrating with respect to the
distribution of 120579
E120579
[
119872
sum
119898=0
119889
119889119905V119894119898
Φ119898 (120579) Φ
ℎ (120579)] = E120579
[
[
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119897119898=0119897 (119905) (V
119895119898minus V119894119898
) Φ119897 (120579) Φ
119898 (120579) Φℎ (120579)]
]
(32)
we find an explicit system of ODEs
119889
119889119905V119894ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172
119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
)
sdot
119872
sum
119897=0119897 (119905) 119890119897119898ℎ
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
) 119898ℎ (119905)
(33)
where 119890119897119898ℎ
= E120579[Φ119897(120579)Φ119898
(120579)Φℎ(120579)] and
119898ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172
119872
sum
119897=0119897 (119905) 119890119897119898ℎ
(34)
We recall that the gPC numerical approach preserves themean velocity of the alignment model (5) In fact from (33)follows
119873
sum
119894=1
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895119894=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) V119895119898
minus1119873
119873
sum
119895119894=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) V119894119898
= 0
(35)
thanks to the symmetry of119867 More generally it can be shownthat if
1119873
119873
sum
119894=1V119894 (120579 119905) = V (36)
Mathematical Problems in Engineering 5
whereV is time-independent then its gPC decomposition isalso mean-preserving since
1119873
119873
sum
119894=1
119872
sum
119898=0E120579
[V119894 (120579 119905) Φ
119898 (120579)] Φ119898 (120579)
=
119872
sum
119898=0E120579
[1119873
119873
sum
119894=1V119894 (120579 119905) Φ
119898 (120579)] Φ119898 (120579)
= V119872
sum
119898=0E120579
[1 sdot Φ119898 (120579)] Φ
119898 (120579) = V
(37)
Remark 3 The gPC approximation (33) can be derivedequivalently without expanding the kernel function 119870(120579 119905)In this way one obtains
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
) 119898ℎ
(38)
where now
119898ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[119870 (120579 119905) Φ119898
Φℎ] (39)
Note that since in general 119873 ≫ 119872 the overall computa-tional cost is 119874(119872119873
2)
4 Selective Control of the gPC Approximation
In order to stabilize the gPC approximation of the Cucker-Smale type model (1) with random inputs we introduce anadditional term which acts as control of the approximateddynamic More specifically we modify the approximation ofthe alignment model (1) by introducing a control term
ℎto
the ℎth component of its gPC approximation
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+ ℎ119876 (V119894ℎ
)
(40)
The control ℎis a solution of
ℎ
= arg minℎisinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894ℎ (119905) minus V
119889ℎ)2
119889119905
+]2
int
119879
0ℎ (119905)
2119889119905]
(41)
where we assume to have for each ℎ = 1 119872 abounded control
ℎhaving value in an admissible set U
119887sub
R119889 for example in the one-dimensional case we considerℎ
isin [119906ℎ119871
119906ℎ119877
] Parameter ] gt 0 is a regularization term
and (V1198890 V1198891 V119889119872) are the desired values for the gPC
coefficients For example
V119889ℎ
= E120579
[V119889Φℎ (120579)] = V
119889E [Φℎ (120579)]
=
V119889
ℎ = 0
0 ℎ = 1 119872
(42)
where V119889is a desired velocity
Moreover the controller action is weighted by a boundedfunction
119876 R119889
997888rarr R119889 (43)
Due to the dependence of the controller effect from thesingle agent velocity we refer to this approach as selectivecontrol see [22]
In order to tackle numerically the above problem whosedirect solution is prohibitively expansive for large numbers ofindividuals we make use of model predictive control (MPC)techniques also referred to as receding horizon strategy orinstantaneous control [23] These techniques have been usedin [8 9 22] in the case of deterministic alignment systems
41 Selective Model Predictive Control Let us split the timeinterval [0 119879] in time intervals of length Δ119905 with 119905
119899= 119899Δ119905
with 119899 = 0 minus 1 The basic idea of the model predictivecontrol approach is to consider a piecewise constant control
ℎ (119905) =
minus1sum
119899=0119899
ℎ120594[119905119899119905119899+1] (119905) (44)
In this way it is possible to determine the value of thecontrol
119899
ℎisin R119889 solving for a state V
119894ℎthe (reduced)
optimization problem
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905)) +
ℎ119876 (V119894ℎ (119905))
V119894ℎ
(119905119899) = V119894ℎ
119899
ℎ= argminℎisinU119887
int
119905119899+1
119905119899
1119873
sdot
119873
sum
119894=1(12
(V119894ℎ (119905) minus V
119889ℎ)2
+]2
ℎ (119905)
2) 119889119904
(45)
Given the control 119899
ℎon the time interval [119905
119899 119905119899+1
] we letV119894ℎ
evolve according to the dynamics
119889
119889119905V119894ℎ
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+ 119899
ℎ119876 (V119899119894ℎ
(119905))
(46)
6 Mathematical Problems in Engineering
in order to obtain the new state V119894ℎ
= V119894ℎ
(119905119899+1
) We againsolve (45) to obtain
119899+1ℎ
with the modified initial data andwe repeat this procedure until we reach Δ119905 = 119879
The reduced optimization problem implies a reduction ofthe complexity of the initial problem since it depends onlyon the single real-valued variable
119899
ℎ On the other hand the
price to pay is that in general the solution of the problem issuboptimal with respect to the full one ((40)-(41))
The quadratic cost and a suitable discretization of (46)allow an explicit representation of
119899
ℎin terms of V
119894ℎand V119899+1119894ℎ
as a feedback controlled system as follows
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
+ Δ119905119899
ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
119899
ℎ= minus
Δ119905
]119873
119873
sum
119894=1(V119899+1119894ℎ
minus V119889ℎ
) 119876119899
119894ℎ
(47)
where 119867119899
119894119895equiv 119867(119909
119899
119894 119909119899
119895) and 119876
119899
119894ℎequiv 119876(V119899
119894ℎ) Note that since
the feedback control 119899
ℎin (47) depends on the velocities at
time 119899 + 1 the constrained interaction at time 119899 is implicitlydefined The feedback controlled system in the discretizedform results in
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
minusΔ119905
2
]119873
119873
sum
119895=1(V119899+1119895ℎ
minus V119889ℎ
) 119876119899
119895ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
(48)
Again the action of the control is substituted by animplicit term representing the relaxation toward the desiredcomponent of the velocity V
119889ℎ and it can be inverted in a fully
explicit systemConsidering the scaling for the regularization parameter
] = 120581Δ119905 the previous scheme is a consistent discretization ofthe following continuous system
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
(49)
Now the control is explicitly embedded in the dynamic ofthe ℎth component of the gPC approximation as a feedbackterm and the parameter 120581 gt 0 determines its strength
42 Choice of the Selective Control For the specific choice ofweight function 119876(sdot) equiv 1 we refer in general to nonselectivecontrol Note that in this case the action of the control is notstrong enough to control the velocity of each agent indeed inthis case we are able only to control the mean velocity of thesystem In fact the control term is reduced to
1120581
(V119889ℎ
minus Vℎ) (50)
where Vℎis the ℎth coefficient of the expansion ofV that is
Vℎ
=1119873
119873
sum
119895=1V119895ℎ (119905) (51)
Then only the projections of themean velocity are steeredtoward the respective components of the target velocity thatis as soon as 120581 rarr 0 it follows that V
ℎ= V119889ℎ Therefore
the choice of the selective function 119876(sdot) is of paramountimportance to ensure the action of the control on the singleagent
In principle one can address directly the control problemon the original system (1) as
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119876 (V119894 (120579 119905))
(52)
where the control term 119906 is solution of
119906 = argmin119906isinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894 (120579 119905) minus V
119889)2
119889119905
+]2
int
119879
0119906 (119905)
2119889119905]
(53)
Here V119889
isin R119889 is a target velocity ] gt 0 a regularizationparameter andU
119887the set of admissible control Similarly to
previous subsection through the approach presented in [89 22] we can derive the time-continuous MPC formulationwhich explicitly embed the control term in the dynamic asfollows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905)
=119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+1
120581119873
119873
sum
119895=1(V119889
minus V119895 (120579 119905)) 119876 (V
119895 (119905 120579)) 119876 (V119894 (119905 120579))
(54)
Mathematical Problems in Engineering 7
Now the gPC approximation of (54) can be obtained as inSection 3 and leads to the set of ODEs
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1119877ℎ
(V119872119894
V119872119895
)
(55)
where
119877ℎ
(V119872119894
V119872119895
) =1
1003817100381710038171003817Φℎ
10038171003817100381710038172E120579 [(V
119889minus V119872119895
) 119876 (V119872119894
(120579 119905))
sdot 119876 (V119872119895
(120579 119905)) Φℎ (120579)]
(56)
In general systems (55) and (49) without further assump-tions on the selective function 119876(sdot) are not equivalent Inaddition to the nonselective case there exists at least onechoice of selective control that makes the two approachestotally interchangeable In fact taking
119876 (V119894) =
V119889
minus V119894
radic(1119873) sum119873
119895=1 (V119889
minus V119895)2 (57)
and 119876(V119894) equiv 0 if V
119895= V119889 forall119895 = 1 119873 we have that 119876(sdot)
is bounded and the control term in (55) takes the followingform
1120581119873
119873
sum
119895=1119877ℎ
=1
1205811003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[(V119889
minus V119872119894
(120579 119905)) Φℎ (120579)]
=1120581
(V119889ℎ
minus V119894ℎ
)
(58)
Similarly the control term in (49) reduces to
1120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
=1120581
(V119889ℎ
minus V119894ℎ
)
(59)
and therefore system (55) coincides with (49) Note that as120581 rarr 0 both systems are driven towards the controlled stateV119894ℎ
= V119889ℎ
which implies a strong control over each singleagent
In Figure 1 we summarize the two equivalent approachesIn the case of nonselective control and of selective func-tion given by (57) the constrained gPC system can beobtained from our initial unconstrained model (1) throughtwo different but equivalent methods The first approximatesthe solution of the Cucker-Smale type model via the gPCprojection and then introduces a control on the coefficientsof the decomposition through a MPC approach in order
Model
Control problem
MPC
gPC
gPC
Control problem
MPC
ConstrainedgPC system
Figure 1 Sketch of the two numerical approaches to solve thecontrol problemwith uncertainty combiningMPCand gPC In bothcases of nonselective control that is 119876(sdot) equiv 1 and of selectivecontrol with 119876(sdot) defined in (57) the two approaches are equivalent
to steer each component to (V1198890 V1198891 V119889119872) whereas
the second method considers a constrained Cucker-Smaleproblem (52) introduces its continuousMPC approximationand then computes the gPC expansion of the resulting systemof constrained differential equations
Remark 4 We remark that the choice of 119876(sdot) stated in(57) for which the two approaches sketched in Figure 1 areidentical is equivalent to consider the constrained dynamic(52) modified as follows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119894
(60)
where the control term119906119894 for each agent 119894 = 1 119873 is given
by the minimization of the following functional
119869 (V1 V119873 1199061 119906119873)
=12
int
119879
0
1119873
119873
sum
119894=1[(V119894 (120579 119905) minus V
119889)2
+]2
119906119894 (119905)
2] 119889119905
(61)
Since the functional is strictly convex applying the (MPC)procedure on a single time interval for the discretizeddynamic of (60)-(61) we obtain 119906
119894in terms of feedback
control
119906119894=1120581
(V119889
minus V119894) 119894 = 1 119873 (62)
8 Mathematical Problems in Engineering
Erro
r102
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus12
10minus14
10minus160 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(a)
Erro
r
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus120 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(b)
Figure 2 Error convergence for increasing number of polynomials in the gPC decomposition approximation (a) Convergence of the meanerror at two fixed times 119879 = 1 and 119879 = 5 (b) Convergence of the variance error In both cases we considered a random time-independentscattering 119870(120579 119905) = 120579 where the random variable 120579 is normally distributed 119873(2 12) The system of ODEs is solved through a 4th-orderRunge-Kutta with Δ119905 = 10minus5
0 05 1 15 2 25 3 35 4 45 5
0
1
2
3
4
5
6
7
Varia
nce
Exact
times10minus3
minus1
t
M = 3
M = 4
M = 5
(a)
Erro
r
t
M = 3
M = 4
M = 5
100
10minus5
10minus10
10minus150 05 1 15 2 25 3 35 4
(b)
Figure 3 Evolution of the variance error 1198641205902 (119905) defined in (63) for the gPC decomposition for the unconstrained model (5) with 119870(120579 119905) =
120579 sim N(2 12) over the time interval [0 119879] with 119879 = 5 and time step Δ119905 = 10minus5
Thus the same considerations on the equivalence of theapproaches hold
5 Numerical Tests
We present some numerical experiments of the behaviorof the flocking model in the case of a Hermite polynomialchaos expansion This choice corresponds to the assumption
of a normal distribution for the stochastic parameter inthe Cucker-Smale type equation (1) and in its constrainedbehavior (49) Numerical results show that the introducedselective control with the weight function (57) is capableof driving the velocity to a desired state even in case ofa dynamic dependent on a normally distributed randominput with fixed or time-dependent variance In the uniforminteraction case since the effect of agentsrsquo positions does not
Mathematical Problems in Engineering 9
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
Exact
M i
RK 4
(a)
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
M i
ExactRK 4
(b)
Figure 4 (a) Sixth-order Hermite gPC decomposition solved through a 4th-order Runge-Kutta (b) 10th-order Hermite gPC decompositionsolved through a 4th-order Runge-Kutta In both cases the final time considered is 119879 = 6 with time step Δ119905 = 10minus2
influence the alignment we report only the results of theagentsrsquo velocities
51 Unconstrained Case In Figures 2 and 3 we presentnumerical results for the convergence of the error using thegPC scheme described in (33) for119867 equiv 1 and solved through a4th-order Runge-Kutta method In particular Figure 2 showsthe behavior of the error with respect to increasing terms ofthe gPC decomposition Here we considered the average intime of the error for the mean and the variance at time 119905 gt 0in the 119871
1 norm
119864V (119905) =1119873
119873
sum
119894=1
100381610038161003816100381610038161003816100381610038161003816
V119894 (119905) minus V119872
119894(119905)
V119894 (119905)
100381610038161003816100381610038161003816100381610038161003816
1198641205902 (119905) =
1119873
119873
sum
119894=1
1003816100381610038161003816100381610038161003816100381610038161003816
1205902119894
(119905) minus 1205902119872119894
(119905)
1205902119894
(119905)
1003816100381610038161003816100381610038161003816100381610038161003816
(63)
where
1205902119894
(119905) = E120579
[(V119894 (120579 119905) minus V
119894 (119905))2] (64)
with V119894(120579 119905) and V
119894(119905) defined in (6) and (8) Observe that if
the scattering rate 119870(120579 119905) is of the from described in (7) withℎ(sdot) equiv 1 and 119896(120579) sim N(120583 120590
2) then in addition to the explicit
evolution for the expected velocity as in (9) we can obtain theexact version for the evolution of the variance of the 119894th agent
1205902119894
(119905) = (V119894 (0) minusV)
2
sdot (exp minus2120583119905 + 212059021199052 minus exp minus2120583119905 + 120590
21199052)
(65)
In (63) we indicated with 1205902119872119894
(119905) the approximatedvariance
1205902119872119894
(119905) =
119872
sum
ℎ=0V2119894ℎ
(119905)E120579 [Φℎ (120579)
2] minus V21198940 (119905) (66)
It is easily seen how the error decays spectrally forincreasing value of 119872 however the method is not capableof going above a certain accuracy and therefore for large 119872
a threshold effect is observed This can be explained by thelarge integration interval we have considered in the numericalcomputation and by the well-known loss of accuracy ofgPC for large times [19] In the case of the error of thevariance (Figure 3) the gPC approximation exhibits a slowerconvergence with respect to the convergence of the meanNext in Figure 4 we see how for large times the solutionof the differential equation (5) diverges and the numericalapproximation is capable of describing accurately its behavioronly through an increasing number of Hermite polynomials
52 Constrained Uniform Interaction Case In Figure 5 weshow different scenarios for the uniform interaction dynamicwith constraints In the first row we represent the solutionfor 119873 = 10 agents whose dynamic is described by (49) withV119889
= 1 different values of 120581 originate different controls onthe average of the system which however do not prevent thesystem from diverging In the second row we show the actionof selective control (57) It is evident that with this choicewe are able to control the system also in the case with highervariance
10 Mathematical Problems in Engineering
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(a)
0 1 2 3 4 5 6 7 8 9 1005
1
15
2
25
t
M i
Evolution with 120579 sim 119977(2 05)
120581 = infin
120581 = 1
120581 = 01
(b)
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(c)
0 1 2 3 4 5 6 7 8 9 10t
05
1
15
2
25
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 05)
(d)
Figure 5 Evolution of the uniform interaction alignment model (49) with 119873 = 10 agents at 119905 = 0 distributed around V = 2 with unitaryvariance depending on a normal random parameter Left column 120579 sim N(2 1) Right column 120579 sim N(2 05) The control term shows itsability to steer the system towards desired velocity V
119889= 1 with different intensities 120581 = 1 and 120581 = 01 when 120581 = infin the control has no
influence First row shows the action of the control acting just on the average velocity 119876 equiv 1 Second row shows the action of selective controlwith 119876(sdot) as in (57)
Observe that the numerical results are coherent with theexplicit solution of the controlled equation Let us considerthe time-independent scattering rate 119870(120579 119905) = 120579 sim N(120583 120590
2)
then from the equation
119889
119889119905V119894 (120579 119905) = 120579 (Vminus V
119894 (120579 119905)) +1120581
(V119889
minus V119894 (120579 119905)) (67)
we can compute the exact solution given V119894(120579 0) = V
119894(0)
V119894 (120579 119905)
=120581V120579 + V
119889
120581120579 + 1
+ (V119894 (0) minus
120581V120579 + V119889
120581120579 + 1) exp minus (120579 +
1120581
) 119905
(68)
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
According to the Cameron-Martin theorem and to theAskey scheme results that pave a connection between ran-dom variables and orthogonal polynomials [18 20 21] wechose a set of polynomials which constitutes the optimal basiswith respect to the distribution of the introduced randomvariable in agreement with Table 1
Let us consider now a general formulation for a randomlyperturbed problem
D (119909 119905 120579 119892) = 119891 (119909 119905 120579) (27)
where we indicated withD a differential operator In generalthe randomness introduced in the problem by 120579 acts as aperturbation ofD of the function 119892 or occurs as uncertaintyof the initial conditions In this work we focus on the firsttwo aspects assuming that initial positions and velocities aredeterministically known
The generalized polynomial chaos method approximatesthe solution 119892(119909 120579 119905) of (27) with its 119872th-order polynomialchaos expansion and considers the Galerkin projections ofthe introduced differential problem that is
E120579
[D (119909 119905 120579 119892) sdot Φℎ (120579)] = E
120579[119891 (119909 120579 119905) sdot Φ
ℎ (120579)]
ℎ = 0 1 119872
(28)
Due to the Galerkin orthogonality between the linearspace P
119872and the error produced in the representation of
119892(119909 120579 119905) with a truncated series from (28) we obtain a set of119872 + 1 purely deterministic equations for the expansion coef-ficients 119892
119898(119909 119905) These subproblems can be solved through
classical discretization techniques From the numerical pointof view through a gPC-type method it is possible to achievean exponential order of convergence to the exact solution ofthe problem unlike Monte Carlo techniques for which theorder is 119874(1radic119872) where 119872 is the number of samples
32 gPC Approximation of the Alignment Model We applythe described gPC decomposition to the solution of thenonhomogeneous differential equation V
119894(120579 119905) in (6) and to
the stochastic scattering rate 119870(120579 119905) that is
V119872119894
(120579 119905) =
119872
sum
119898=0V119894119898 (119905) Φ
119898 (120579)
119870119872
(120579 119905) =
119872
sum
119897=0119897 (119905) Φ
119897 (120579)
(29)
whereV119894119898 (119905) = E
120579[V119894 (120579 119905) Φ
119898 (120579)]
119897 (119905) = E
120579[119870 (120579 119905) Φ
119897 (120579)]
(30)
We obtain the following polynomial chaos expansion
119889
119889119905
119872
sum
119898=0V119894119898
Φ119898 (120579) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119897119898=0119897 (119905) (V
119895119898minus V119894119898
) Φ119897 (120579) Φ
119898 (120579)
(31)
Table 1 The different gPC choices for the polynomial expansions
Probability law of 120579 Expansion polynomials SupportGaussian Hermite (minusinfin +infin)
Uniform Legendre [119886 119887]
Beta Jacobi [119886 119887]
Gamma Laguerre [0 +infin)
Poisson Charlier N
Multiplying the above expression by an orthogonal ele-ment of the basis Φ
ℎ(120579) and integrating with respect to the
distribution of 120579
E120579
[
119872
sum
119898=0
119889
119889119905V119894119898
Φ119898 (120579) Φ
ℎ (120579)] = E120579
[
[
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119897119898=0119897 (119905) (V
119895119898minus V119894119898
) Φ119897 (120579) Φ
119898 (120579) Φℎ (120579)]
]
(32)
we find an explicit system of ODEs
119889
119889119905V119894ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172
119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
)
sdot
119872
sum
119897=0119897 (119905) 119890119897119898ℎ
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
) 119898ℎ (119905)
(33)
where 119890119897119898ℎ
= E120579[Φ119897(120579)Φ119898
(120579)Φℎ(120579)] and
119898ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172
119872
sum
119897=0119897 (119905) 119890119897119898ℎ
(34)
We recall that the gPC numerical approach preserves themean velocity of the alignment model (5) In fact from (33)follows
119873
sum
119894=1
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895119894=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) V119895119898
minus1119873
119873
sum
119895119894=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) V119894119898
= 0
(35)
thanks to the symmetry of119867 More generally it can be shownthat if
1119873
119873
sum
119894=1V119894 (120579 119905) = V (36)
Mathematical Problems in Engineering 5
whereV is time-independent then its gPC decomposition isalso mean-preserving since
1119873
119873
sum
119894=1
119872
sum
119898=0E120579
[V119894 (120579 119905) Φ
119898 (120579)] Φ119898 (120579)
=
119872
sum
119898=0E120579
[1119873
119873
sum
119894=1V119894 (120579 119905) Φ
119898 (120579)] Φ119898 (120579)
= V119872
sum
119898=0E120579
[1 sdot Φ119898 (120579)] Φ
119898 (120579) = V
(37)
Remark 3 The gPC approximation (33) can be derivedequivalently without expanding the kernel function 119870(120579 119905)In this way one obtains
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
) 119898ℎ
(38)
where now
119898ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[119870 (120579 119905) Φ119898
Φℎ] (39)
Note that since in general 119873 ≫ 119872 the overall computa-tional cost is 119874(119872119873
2)
4 Selective Control of the gPC Approximation
In order to stabilize the gPC approximation of the Cucker-Smale type model (1) with random inputs we introduce anadditional term which acts as control of the approximateddynamic More specifically we modify the approximation ofthe alignment model (1) by introducing a control term
ℎto
the ℎth component of its gPC approximation
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+ ℎ119876 (V119894ℎ
)
(40)
The control ℎis a solution of
ℎ
= arg minℎisinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894ℎ (119905) minus V
119889ℎ)2
119889119905
+]2
int
119879
0ℎ (119905)
2119889119905]
(41)
where we assume to have for each ℎ = 1 119872 abounded control
ℎhaving value in an admissible set U
119887sub
R119889 for example in the one-dimensional case we considerℎ
isin [119906ℎ119871
119906ℎ119877
] Parameter ] gt 0 is a regularization term
and (V1198890 V1198891 V119889119872) are the desired values for the gPC
coefficients For example
V119889ℎ
= E120579
[V119889Φℎ (120579)] = V
119889E [Φℎ (120579)]
=
V119889
ℎ = 0
0 ℎ = 1 119872
(42)
where V119889is a desired velocity
Moreover the controller action is weighted by a boundedfunction
119876 R119889
997888rarr R119889 (43)
Due to the dependence of the controller effect from thesingle agent velocity we refer to this approach as selectivecontrol see [22]
In order to tackle numerically the above problem whosedirect solution is prohibitively expansive for large numbers ofindividuals we make use of model predictive control (MPC)techniques also referred to as receding horizon strategy orinstantaneous control [23] These techniques have been usedin [8 9 22] in the case of deterministic alignment systems
41 Selective Model Predictive Control Let us split the timeinterval [0 119879] in time intervals of length Δ119905 with 119905
119899= 119899Δ119905
with 119899 = 0 minus 1 The basic idea of the model predictivecontrol approach is to consider a piecewise constant control
ℎ (119905) =
minus1sum
119899=0119899
ℎ120594[119905119899119905119899+1] (119905) (44)
In this way it is possible to determine the value of thecontrol
119899
ℎisin R119889 solving for a state V
119894ℎthe (reduced)
optimization problem
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905)) +
ℎ119876 (V119894ℎ (119905))
V119894ℎ
(119905119899) = V119894ℎ
119899
ℎ= argminℎisinU119887
int
119905119899+1
119905119899
1119873
sdot
119873
sum
119894=1(12
(V119894ℎ (119905) minus V
119889ℎ)2
+]2
ℎ (119905)
2) 119889119904
(45)
Given the control 119899
ℎon the time interval [119905
119899 119905119899+1
] we letV119894ℎ
evolve according to the dynamics
119889
119889119905V119894ℎ
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+ 119899
ℎ119876 (V119899119894ℎ
(119905))
(46)
6 Mathematical Problems in Engineering
in order to obtain the new state V119894ℎ
= V119894ℎ
(119905119899+1
) We againsolve (45) to obtain
119899+1ℎ
with the modified initial data andwe repeat this procedure until we reach Δ119905 = 119879
The reduced optimization problem implies a reduction ofthe complexity of the initial problem since it depends onlyon the single real-valued variable
119899
ℎ On the other hand the
price to pay is that in general the solution of the problem issuboptimal with respect to the full one ((40)-(41))
The quadratic cost and a suitable discretization of (46)allow an explicit representation of
119899
ℎin terms of V
119894ℎand V119899+1119894ℎ
as a feedback controlled system as follows
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
+ Δ119905119899
ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
119899
ℎ= minus
Δ119905
]119873
119873
sum
119894=1(V119899+1119894ℎ
minus V119889ℎ
) 119876119899
119894ℎ
(47)
where 119867119899
119894119895equiv 119867(119909
119899
119894 119909119899
119895) and 119876
119899
119894ℎequiv 119876(V119899
119894ℎ) Note that since
the feedback control 119899
ℎin (47) depends on the velocities at
time 119899 + 1 the constrained interaction at time 119899 is implicitlydefined The feedback controlled system in the discretizedform results in
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
minusΔ119905
2
]119873
119873
sum
119895=1(V119899+1119895ℎ
minus V119889ℎ
) 119876119899
119895ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
(48)
Again the action of the control is substituted by animplicit term representing the relaxation toward the desiredcomponent of the velocity V
119889ℎ and it can be inverted in a fully
explicit systemConsidering the scaling for the regularization parameter
] = 120581Δ119905 the previous scheme is a consistent discretization ofthe following continuous system
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
(49)
Now the control is explicitly embedded in the dynamic ofthe ℎth component of the gPC approximation as a feedbackterm and the parameter 120581 gt 0 determines its strength
42 Choice of the Selective Control For the specific choice ofweight function 119876(sdot) equiv 1 we refer in general to nonselectivecontrol Note that in this case the action of the control is notstrong enough to control the velocity of each agent indeed inthis case we are able only to control the mean velocity of thesystem In fact the control term is reduced to
1120581
(V119889ℎ
minus Vℎ) (50)
where Vℎis the ℎth coefficient of the expansion ofV that is
Vℎ
=1119873
119873
sum
119895=1V119895ℎ (119905) (51)
Then only the projections of themean velocity are steeredtoward the respective components of the target velocity thatis as soon as 120581 rarr 0 it follows that V
ℎ= V119889ℎ Therefore
the choice of the selective function 119876(sdot) is of paramountimportance to ensure the action of the control on the singleagent
In principle one can address directly the control problemon the original system (1) as
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119876 (V119894 (120579 119905))
(52)
where the control term 119906 is solution of
119906 = argmin119906isinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894 (120579 119905) minus V
119889)2
119889119905
+]2
int
119879
0119906 (119905)
2119889119905]
(53)
Here V119889
isin R119889 is a target velocity ] gt 0 a regularizationparameter andU
119887the set of admissible control Similarly to
previous subsection through the approach presented in [89 22] we can derive the time-continuous MPC formulationwhich explicitly embed the control term in the dynamic asfollows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905)
=119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+1
120581119873
119873
sum
119895=1(V119889
minus V119895 (120579 119905)) 119876 (V
119895 (119905 120579)) 119876 (V119894 (119905 120579))
(54)
Mathematical Problems in Engineering 7
Now the gPC approximation of (54) can be obtained as inSection 3 and leads to the set of ODEs
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1119877ℎ
(V119872119894
V119872119895
)
(55)
where
119877ℎ
(V119872119894
V119872119895
) =1
1003817100381710038171003817Φℎ
10038171003817100381710038172E120579 [(V
119889minus V119872119895
) 119876 (V119872119894
(120579 119905))
sdot 119876 (V119872119895
(120579 119905)) Φℎ (120579)]
(56)
In general systems (55) and (49) without further assump-tions on the selective function 119876(sdot) are not equivalent Inaddition to the nonselective case there exists at least onechoice of selective control that makes the two approachestotally interchangeable In fact taking
119876 (V119894) =
V119889
minus V119894
radic(1119873) sum119873
119895=1 (V119889
minus V119895)2 (57)
and 119876(V119894) equiv 0 if V
119895= V119889 forall119895 = 1 119873 we have that 119876(sdot)
is bounded and the control term in (55) takes the followingform
1120581119873
119873
sum
119895=1119877ℎ
=1
1205811003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[(V119889
minus V119872119894
(120579 119905)) Φℎ (120579)]
=1120581
(V119889ℎ
minus V119894ℎ
)
(58)
Similarly the control term in (49) reduces to
1120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
=1120581
(V119889ℎ
minus V119894ℎ
)
(59)
and therefore system (55) coincides with (49) Note that as120581 rarr 0 both systems are driven towards the controlled stateV119894ℎ
= V119889ℎ
which implies a strong control over each singleagent
In Figure 1 we summarize the two equivalent approachesIn the case of nonselective control and of selective func-tion given by (57) the constrained gPC system can beobtained from our initial unconstrained model (1) throughtwo different but equivalent methods The first approximatesthe solution of the Cucker-Smale type model via the gPCprojection and then introduces a control on the coefficientsof the decomposition through a MPC approach in order
Model
Control problem
MPC
gPC
gPC
Control problem
MPC
ConstrainedgPC system
Figure 1 Sketch of the two numerical approaches to solve thecontrol problemwith uncertainty combiningMPCand gPC In bothcases of nonselective control that is 119876(sdot) equiv 1 and of selectivecontrol with 119876(sdot) defined in (57) the two approaches are equivalent
to steer each component to (V1198890 V1198891 V119889119872) whereas
the second method considers a constrained Cucker-Smaleproblem (52) introduces its continuousMPC approximationand then computes the gPC expansion of the resulting systemof constrained differential equations
Remark 4 We remark that the choice of 119876(sdot) stated in(57) for which the two approaches sketched in Figure 1 areidentical is equivalent to consider the constrained dynamic(52) modified as follows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119894
(60)
where the control term119906119894 for each agent 119894 = 1 119873 is given
by the minimization of the following functional
119869 (V1 V119873 1199061 119906119873)
=12
int
119879
0
1119873
119873
sum
119894=1[(V119894 (120579 119905) minus V
119889)2
+]2
119906119894 (119905)
2] 119889119905
(61)
Since the functional is strictly convex applying the (MPC)procedure on a single time interval for the discretizeddynamic of (60)-(61) we obtain 119906
119894in terms of feedback
control
119906119894=1120581
(V119889
minus V119894) 119894 = 1 119873 (62)
8 Mathematical Problems in Engineering
Erro
r102
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus12
10minus14
10minus160 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(a)
Erro
r
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus120 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(b)
Figure 2 Error convergence for increasing number of polynomials in the gPC decomposition approximation (a) Convergence of the meanerror at two fixed times 119879 = 1 and 119879 = 5 (b) Convergence of the variance error In both cases we considered a random time-independentscattering 119870(120579 119905) = 120579 where the random variable 120579 is normally distributed 119873(2 12) The system of ODEs is solved through a 4th-orderRunge-Kutta with Δ119905 = 10minus5
0 05 1 15 2 25 3 35 4 45 5
0
1
2
3
4
5
6
7
Varia
nce
Exact
times10minus3
minus1
t
M = 3
M = 4
M = 5
(a)
Erro
r
t
M = 3
M = 4
M = 5
100
10minus5
10minus10
10minus150 05 1 15 2 25 3 35 4
(b)
Figure 3 Evolution of the variance error 1198641205902 (119905) defined in (63) for the gPC decomposition for the unconstrained model (5) with 119870(120579 119905) =
120579 sim N(2 12) over the time interval [0 119879] with 119879 = 5 and time step Δ119905 = 10minus5
Thus the same considerations on the equivalence of theapproaches hold
5 Numerical Tests
We present some numerical experiments of the behaviorof the flocking model in the case of a Hermite polynomialchaos expansion This choice corresponds to the assumption
of a normal distribution for the stochastic parameter inthe Cucker-Smale type equation (1) and in its constrainedbehavior (49) Numerical results show that the introducedselective control with the weight function (57) is capableof driving the velocity to a desired state even in case ofa dynamic dependent on a normally distributed randominput with fixed or time-dependent variance In the uniforminteraction case since the effect of agentsrsquo positions does not
Mathematical Problems in Engineering 9
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
Exact
M i
RK 4
(a)
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
M i
ExactRK 4
(b)
Figure 4 (a) Sixth-order Hermite gPC decomposition solved through a 4th-order Runge-Kutta (b) 10th-order Hermite gPC decompositionsolved through a 4th-order Runge-Kutta In both cases the final time considered is 119879 = 6 with time step Δ119905 = 10minus2
influence the alignment we report only the results of theagentsrsquo velocities
51 Unconstrained Case In Figures 2 and 3 we presentnumerical results for the convergence of the error using thegPC scheme described in (33) for119867 equiv 1 and solved through a4th-order Runge-Kutta method In particular Figure 2 showsthe behavior of the error with respect to increasing terms ofthe gPC decomposition Here we considered the average intime of the error for the mean and the variance at time 119905 gt 0in the 119871
1 norm
119864V (119905) =1119873
119873
sum
119894=1
100381610038161003816100381610038161003816100381610038161003816
V119894 (119905) minus V119872
119894(119905)
V119894 (119905)
100381610038161003816100381610038161003816100381610038161003816
1198641205902 (119905) =
1119873
119873
sum
119894=1
1003816100381610038161003816100381610038161003816100381610038161003816
1205902119894
(119905) minus 1205902119872119894
(119905)
1205902119894
(119905)
1003816100381610038161003816100381610038161003816100381610038161003816
(63)
where
1205902119894
(119905) = E120579
[(V119894 (120579 119905) minus V
119894 (119905))2] (64)
with V119894(120579 119905) and V
119894(119905) defined in (6) and (8) Observe that if
the scattering rate 119870(120579 119905) is of the from described in (7) withℎ(sdot) equiv 1 and 119896(120579) sim N(120583 120590
2) then in addition to the explicit
evolution for the expected velocity as in (9) we can obtain theexact version for the evolution of the variance of the 119894th agent
1205902119894
(119905) = (V119894 (0) minusV)
2
sdot (exp minus2120583119905 + 212059021199052 minus exp minus2120583119905 + 120590
21199052)
(65)
In (63) we indicated with 1205902119872119894
(119905) the approximatedvariance
1205902119872119894
(119905) =
119872
sum
ℎ=0V2119894ℎ
(119905)E120579 [Φℎ (120579)
2] minus V21198940 (119905) (66)
It is easily seen how the error decays spectrally forincreasing value of 119872 however the method is not capableof going above a certain accuracy and therefore for large 119872
a threshold effect is observed This can be explained by thelarge integration interval we have considered in the numericalcomputation and by the well-known loss of accuracy ofgPC for large times [19] In the case of the error of thevariance (Figure 3) the gPC approximation exhibits a slowerconvergence with respect to the convergence of the meanNext in Figure 4 we see how for large times the solutionof the differential equation (5) diverges and the numericalapproximation is capable of describing accurately its behavioronly through an increasing number of Hermite polynomials
52 Constrained Uniform Interaction Case In Figure 5 weshow different scenarios for the uniform interaction dynamicwith constraints In the first row we represent the solutionfor 119873 = 10 agents whose dynamic is described by (49) withV119889
= 1 different values of 120581 originate different controls onthe average of the system which however do not prevent thesystem from diverging In the second row we show the actionof selective control (57) It is evident that with this choicewe are able to control the system also in the case with highervariance
10 Mathematical Problems in Engineering
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(a)
0 1 2 3 4 5 6 7 8 9 1005
1
15
2
25
t
M i
Evolution with 120579 sim 119977(2 05)
120581 = infin
120581 = 1
120581 = 01
(b)
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(c)
0 1 2 3 4 5 6 7 8 9 10t
05
1
15
2
25
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 05)
(d)
Figure 5 Evolution of the uniform interaction alignment model (49) with 119873 = 10 agents at 119905 = 0 distributed around V = 2 with unitaryvariance depending on a normal random parameter Left column 120579 sim N(2 1) Right column 120579 sim N(2 05) The control term shows itsability to steer the system towards desired velocity V
119889= 1 with different intensities 120581 = 1 and 120581 = 01 when 120581 = infin the control has no
influence First row shows the action of the control acting just on the average velocity 119876 equiv 1 Second row shows the action of selective controlwith 119876(sdot) as in (57)
Observe that the numerical results are coherent with theexplicit solution of the controlled equation Let us considerthe time-independent scattering rate 119870(120579 119905) = 120579 sim N(120583 120590
2)
then from the equation
119889
119889119905V119894 (120579 119905) = 120579 (Vminus V
119894 (120579 119905)) +1120581
(V119889
minus V119894 (120579 119905)) (67)
we can compute the exact solution given V119894(120579 0) = V
119894(0)
V119894 (120579 119905)
=120581V120579 + V
119889
120581120579 + 1
+ (V119894 (0) minus
120581V120579 + V119889
120581120579 + 1) exp minus (120579 +
1120581
) 119905
(68)
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
whereV is time-independent then its gPC decomposition isalso mean-preserving since
1119873
119873
sum
119894=1
119872
sum
119898=0E120579
[V119894 (120579 119905) Φ
119898 (120579)] Φ119898 (120579)
=
119872
sum
119898=0E120579
[1119873
119873
sum
119894=1V119894 (120579 119905) Φ
119898 (120579)] Φ119898 (120579)
= V119872
sum
119898=0E120579
[1 sdot Φ119898 (120579)] Φ
119898 (120579) = V
(37)
Remark 3 The gPC approximation (33) can be derivedequivalently without expanding the kernel function 119870(120579 119905)In this way one obtains
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0(V119895119898
minus V119894119898
) 119898ℎ
(38)
where now
119898ℎ (119905) =
11003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[119870 (120579 119905) Φ119898
Φℎ] (39)
Note that since in general 119873 ≫ 119872 the overall computa-tional cost is 119874(119872119873
2)
4 Selective Control of the gPC Approximation
In order to stabilize the gPC approximation of the Cucker-Smale type model (1) with random inputs we introduce anadditional term which acts as control of the approximateddynamic More specifically we modify the approximation ofthe alignment model (1) by introducing a control term
ℎto
the ℎth component of its gPC approximation
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+ ℎ119876 (V119894ℎ
)
(40)
The control ℎis a solution of
ℎ
= arg minℎisinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894ℎ (119905) minus V
119889ℎ)2
119889119905
+]2
int
119879
0ℎ (119905)
2119889119905]
(41)
where we assume to have for each ℎ = 1 119872 abounded control
ℎhaving value in an admissible set U
119887sub
R119889 for example in the one-dimensional case we considerℎ
isin [119906ℎ119871
119906ℎ119877
] Parameter ] gt 0 is a regularization term
and (V1198890 V1198891 V119889119872) are the desired values for the gPC
coefficients For example
V119889ℎ
= E120579
[V119889Φℎ (120579)] = V
119889E [Φℎ (120579)]
=
V119889
ℎ = 0
0 ℎ = 1 119872
(42)
where V119889is a desired velocity
Moreover the controller action is weighted by a boundedfunction
119876 R119889
997888rarr R119889 (43)
Due to the dependence of the controller effect from thesingle agent velocity we refer to this approach as selectivecontrol see [22]
In order to tackle numerically the above problem whosedirect solution is prohibitively expansive for large numbers ofindividuals we make use of model predictive control (MPC)techniques also referred to as receding horizon strategy orinstantaneous control [23] These techniques have been usedin [8 9 22] in the case of deterministic alignment systems
41 Selective Model Predictive Control Let us split the timeinterval [0 119879] in time intervals of length Δ119905 with 119905
119899= 119899Δ119905
with 119899 = 0 minus 1 The basic idea of the model predictivecontrol approach is to consider a piecewise constant control
ℎ (119905) =
minus1sum
119899=0119899
ℎ120594[119905119899119905119899+1] (119905) (44)
In this way it is possible to determine the value of thecontrol
119899
ℎisin R119889 solving for a state V
119894ℎthe (reduced)
optimization problem
119889
119889119905V119894ℎ (119905) =
1119873
119873
sum
119895=1119867 (119909119894 119909119895)
sdot
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905)) +
ℎ119876 (V119894ℎ (119905))
V119894ℎ
(119905119899) = V119894ℎ
119899
ℎ= argminℎisinU119887
int
119905119899+1
119905119899
1119873
sdot
119873
sum
119894=1(12
(V119894ℎ (119905) minus V
119889ℎ)2
+]2
ℎ (119905)
2) 119889119904
(45)
Given the control 119899
ℎon the time interval [119905
119899 119905119899+1
] we letV119894ℎ
evolve according to the dynamics
119889
119889119905V119894ℎ
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+ 119899
ℎ119876 (V119899119894ℎ
(119905))
(46)
6 Mathematical Problems in Engineering
in order to obtain the new state V119894ℎ
= V119894ℎ
(119905119899+1
) We againsolve (45) to obtain
119899+1ℎ
with the modified initial data andwe repeat this procedure until we reach Δ119905 = 119879
The reduced optimization problem implies a reduction ofthe complexity of the initial problem since it depends onlyon the single real-valued variable
119899
ℎ On the other hand the
price to pay is that in general the solution of the problem issuboptimal with respect to the full one ((40)-(41))
The quadratic cost and a suitable discretization of (46)allow an explicit representation of
119899
ℎin terms of V
119894ℎand V119899+1119894ℎ
as a feedback controlled system as follows
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
+ Δ119905119899
ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
119899
ℎ= minus
Δ119905
]119873
119873
sum
119894=1(V119899+1119894ℎ
minus V119889ℎ
) 119876119899
119894ℎ
(47)
where 119867119899
119894119895equiv 119867(119909
119899
119894 119909119899
119895) and 119876
119899
119894ℎequiv 119876(V119899
119894ℎ) Note that since
the feedback control 119899
ℎin (47) depends on the velocities at
time 119899 + 1 the constrained interaction at time 119899 is implicitlydefined The feedback controlled system in the discretizedform results in
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
minusΔ119905
2
]119873
119873
sum
119895=1(V119899+1119895ℎ
minus V119889ℎ
) 119876119899
119895ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
(48)
Again the action of the control is substituted by animplicit term representing the relaxation toward the desiredcomponent of the velocity V
119889ℎ and it can be inverted in a fully
explicit systemConsidering the scaling for the regularization parameter
] = 120581Δ119905 the previous scheme is a consistent discretization ofthe following continuous system
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
(49)
Now the control is explicitly embedded in the dynamic ofthe ℎth component of the gPC approximation as a feedbackterm and the parameter 120581 gt 0 determines its strength
42 Choice of the Selective Control For the specific choice ofweight function 119876(sdot) equiv 1 we refer in general to nonselectivecontrol Note that in this case the action of the control is notstrong enough to control the velocity of each agent indeed inthis case we are able only to control the mean velocity of thesystem In fact the control term is reduced to
1120581
(V119889ℎ
minus Vℎ) (50)
where Vℎis the ℎth coefficient of the expansion ofV that is
Vℎ
=1119873
119873
sum
119895=1V119895ℎ (119905) (51)
Then only the projections of themean velocity are steeredtoward the respective components of the target velocity thatis as soon as 120581 rarr 0 it follows that V
ℎ= V119889ℎ Therefore
the choice of the selective function 119876(sdot) is of paramountimportance to ensure the action of the control on the singleagent
In principle one can address directly the control problemon the original system (1) as
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119876 (V119894 (120579 119905))
(52)
where the control term 119906 is solution of
119906 = argmin119906isinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894 (120579 119905) minus V
119889)2
119889119905
+]2
int
119879
0119906 (119905)
2119889119905]
(53)
Here V119889
isin R119889 is a target velocity ] gt 0 a regularizationparameter andU
119887the set of admissible control Similarly to
previous subsection through the approach presented in [89 22] we can derive the time-continuous MPC formulationwhich explicitly embed the control term in the dynamic asfollows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905)
=119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+1
120581119873
119873
sum
119895=1(V119889
minus V119895 (120579 119905)) 119876 (V
119895 (119905 120579)) 119876 (V119894 (119905 120579))
(54)
Mathematical Problems in Engineering 7
Now the gPC approximation of (54) can be obtained as inSection 3 and leads to the set of ODEs
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1119877ℎ
(V119872119894
V119872119895
)
(55)
where
119877ℎ
(V119872119894
V119872119895
) =1
1003817100381710038171003817Φℎ
10038171003817100381710038172E120579 [(V
119889minus V119872119895
) 119876 (V119872119894
(120579 119905))
sdot 119876 (V119872119895
(120579 119905)) Φℎ (120579)]
(56)
In general systems (55) and (49) without further assump-tions on the selective function 119876(sdot) are not equivalent Inaddition to the nonselective case there exists at least onechoice of selective control that makes the two approachestotally interchangeable In fact taking
119876 (V119894) =
V119889
minus V119894
radic(1119873) sum119873
119895=1 (V119889
minus V119895)2 (57)
and 119876(V119894) equiv 0 if V
119895= V119889 forall119895 = 1 119873 we have that 119876(sdot)
is bounded and the control term in (55) takes the followingform
1120581119873
119873
sum
119895=1119877ℎ
=1
1205811003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[(V119889
minus V119872119894
(120579 119905)) Φℎ (120579)]
=1120581
(V119889ℎ
minus V119894ℎ
)
(58)
Similarly the control term in (49) reduces to
1120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
=1120581
(V119889ℎ
minus V119894ℎ
)
(59)
and therefore system (55) coincides with (49) Note that as120581 rarr 0 both systems are driven towards the controlled stateV119894ℎ
= V119889ℎ
which implies a strong control over each singleagent
In Figure 1 we summarize the two equivalent approachesIn the case of nonselective control and of selective func-tion given by (57) the constrained gPC system can beobtained from our initial unconstrained model (1) throughtwo different but equivalent methods The first approximatesthe solution of the Cucker-Smale type model via the gPCprojection and then introduces a control on the coefficientsof the decomposition through a MPC approach in order
Model
Control problem
MPC
gPC
gPC
Control problem
MPC
ConstrainedgPC system
Figure 1 Sketch of the two numerical approaches to solve thecontrol problemwith uncertainty combiningMPCand gPC In bothcases of nonselective control that is 119876(sdot) equiv 1 and of selectivecontrol with 119876(sdot) defined in (57) the two approaches are equivalent
to steer each component to (V1198890 V1198891 V119889119872) whereas
the second method considers a constrained Cucker-Smaleproblem (52) introduces its continuousMPC approximationand then computes the gPC expansion of the resulting systemof constrained differential equations
Remark 4 We remark that the choice of 119876(sdot) stated in(57) for which the two approaches sketched in Figure 1 areidentical is equivalent to consider the constrained dynamic(52) modified as follows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119894
(60)
where the control term119906119894 for each agent 119894 = 1 119873 is given
by the minimization of the following functional
119869 (V1 V119873 1199061 119906119873)
=12
int
119879
0
1119873
119873
sum
119894=1[(V119894 (120579 119905) minus V
119889)2
+]2
119906119894 (119905)
2] 119889119905
(61)
Since the functional is strictly convex applying the (MPC)procedure on a single time interval for the discretizeddynamic of (60)-(61) we obtain 119906
119894in terms of feedback
control
119906119894=1120581
(V119889
minus V119894) 119894 = 1 119873 (62)
8 Mathematical Problems in Engineering
Erro
r102
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus12
10minus14
10minus160 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(a)
Erro
r
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus120 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(b)
Figure 2 Error convergence for increasing number of polynomials in the gPC decomposition approximation (a) Convergence of the meanerror at two fixed times 119879 = 1 and 119879 = 5 (b) Convergence of the variance error In both cases we considered a random time-independentscattering 119870(120579 119905) = 120579 where the random variable 120579 is normally distributed 119873(2 12) The system of ODEs is solved through a 4th-orderRunge-Kutta with Δ119905 = 10minus5
0 05 1 15 2 25 3 35 4 45 5
0
1
2
3
4
5
6
7
Varia
nce
Exact
times10minus3
minus1
t
M = 3
M = 4
M = 5
(a)
Erro
r
t
M = 3
M = 4
M = 5
100
10minus5
10minus10
10minus150 05 1 15 2 25 3 35 4
(b)
Figure 3 Evolution of the variance error 1198641205902 (119905) defined in (63) for the gPC decomposition for the unconstrained model (5) with 119870(120579 119905) =
120579 sim N(2 12) over the time interval [0 119879] with 119879 = 5 and time step Δ119905 = 10minus5
Thus the same considerations on the equivalence of theapproaches hold
5 Numerical Tests
We present some numerical experiments of the behaviorof the flocking model in the case of a Hermite polynomialchaos expansion This choice corresponds to the assumption
of a normal distribution for the stochastic parameter inthe Cucker-Smale type equation (1) and in its constrainedbehavior (49) Numerical results show that the introducedselective control with the weight function (57) is capableof driving the velocity to a desired state even in case ofa dynamic dependent on a normally distributed randominput with fixed or time-dependent variance In the uniforminteraction case since the effect of agentsrsquo positions does not
Mathematical Problems in Engineering 9
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
Exact
M i
RK 4
(a)
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
M i
ExactRK 4
(b)
Figure 4 (a) Sixth-order Hermite gPC decomposition solved through a 4th-order Runge-Kutta (b) 10th-order Hermite gPC decompositionsolved through a 4th-order Runge-Kutta In both cases the final time considered is 119879 = 6 with time step Δ119905 = 10minus2
influence the alignment we report only the results of theagentsrsquo velocities
51 Unconstrained Case In Figures 2 and 3 we presentnumerical results for the convergence of the error using thegPC scheme described in (33) for119867 equiv 1 and solved through a4th-order Runge-Kutta method In particular Figure 2 showsthe behavior of the error with respect to increasing terms ofthe gPC decomposition Here we considered the average intime of the error for the mean and the variance at time 119905 gt 0in the 119871
1 norm
119864V (119905) =1119873
119873
sum
119894=1
100381610038161003816100381610038161003816100381610038161003816
V119894 (119905) minus V119872
119894(119905)
V119894 (119905)
100381610038161003816100381610038161003816100381610038161003816
1198641205902 (119905) =
1119873
119873
sum
119894=1
1003816100381610038161003816100381610038161003816100381610038161003816
1205902119894
(119905) minus 1205902119872119894
(119905)
1205902119894
(119905)
1003816100381610038161003816100381610038161003816100381610038161003816
(63)
where
1205902119894
(119905) = E120579
[(V119894 (120579 119905) minus V
119894 (119905))2] (64)
with V119894(120579 119905) and V
119894(119905) defined in (6) and (8) Observe that if
the scattering rate 119870(120579 119905) is of the from described in (7) withℎ(sdot) equiv 1 and 119896(120579) sim N(120583 120590
2) then in addition to the explicit
evolution for the expected velocity as in (9) we can obtain theexact version for the evolution of the variance of the 119894th agent
1205902119894
(119905) = (V119894 (0) minusV)
2
sdot (exp minus2120583119905 + 212059021199052 minus exp minus2120583119905 + 120590
21199052)
(65)
In (63) we indicated with 1205902119872119894
(119905) the approximatedvariance
1205902119872119894
(119905) =
119872
sum
ℎ=0V2119894ℎ
(119905)E120579 [Φℎ (120579)
2] minus V21198940 (119905) (66)
It is easily seen how the error decays spectrally forincreasing value of 119872 however the method is not capableof going above a certain accuracy and therefore for large 119872
a threshold effect is observed This can be explained by thelarge integration interval we have considered in the numericalcomputation and by the well-known loss of accuracy ofgPC for large times [19] In the case of the error of thevariance (Figure 3) the gPC approximation exhibits a slowerconvergence with respect to the convergence of the meanNext in Figure 4 we see how for large times the solutionof the differential equation (5) diverges and the numericalapproximation is capable of describing accurately its behavioronly through an increasing number of Hermite polynomials
52 Constrained Uniform Interaction Case In Figure 5 weshow different scenarios for the uniform interaction dynamicwith constraints In the first row we represent the solutionfor 119873 = 10 agents whose dynamic is described by (49) withV119889
= 1 different values of 120581 originate different controls onthe average of the system which however do not prevent thesystem from diverging In the second row we show the actionof selective control (57) It is evident that with this choicewe are able to control the system also in the case with highervariance
10 Mathematical Problems in Engineering
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(a)
0 1 2 3 4 5 6 7 8 9 1005
1
15
2
25
t
M i
Evolution with 120579 sim 119977(2 05)
120581 = infin
120581 = 1
120581 = 01
(b)
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(c)
0 1 2 3 4 5 6 7 8 9 10t
05
1
15
2
25
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 05)
(d)
Figure 5 Evolution of the uniform interaction alignment model (49) with 119873 = 10 agents at 119905 = 0 distributed around V = 2 with unitaryvariance depending on a normal random parameter Left column 120579 sim N(2 1) Right column 120579 sim N(2 05) The control term shows itsability to steer the system towards desired velocity V
119889= 1 with different intensities 120581 = 1 and 120581 = 01 when 120581 = infin the control has no
influence First row shows the action of the control acting just on the average velocity 119876 equiv 1 Second row shows the action of selective controlwith 119876(sdot) as in (57)
Observe that the numerical results are coherent with theexplicit solution of the controlled equation Let us considerthe time-independent scattering rate 119870(120579 119905) = 120579 sim N(120583 120590
2)
then from the equation
119889
119889119905V119894 (120579 119905) = 120579 (Vminus V
119894 (120579 119905)) +1120581
(V119889
minus V119894 (120579 119905)) (67)
we can compute the exact solution given V119894(120579 0) = V
119894(0)
V119894 (120579 119905)
=120581V120579 + V
119889
120581120579 + 1
+ (V119894 (0) minus
120581V120579 + V119889
120581120579 + 1) exp minus (120579 +
1120581
) 119905
(68)
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
in order to obtain the new state V119894ℎ
= V119894ℎ
(119905119899+1
) We againsolve (45) to obtain
119899+1ℎ
with the modified initial data andwe repeat this procedure until we reach Δ119905 = 119879
The reduced optimization problem implies a reduction ofthe complexity of the initial problem since it depends onlyon the single real-valued variable
119899
ℎ On the other hand the
price to pay is that in general the solution of the problem issuboptimal with respect to the full one ((40)-(41))
The quadratic cost and a suitable discretization of (46)allow an explicit representation of
119899
ℎin terms of V
119894ℎand V119899+1119894ℎ
as a feedback controlled system as follows
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
+ Δ119905119899
ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
119899
ℎ= minus
Δ119905
]119873
119873
sum
119894=1(V119899+1119894ℎ
minus V119889ℎ
) 119876119899
119894ℎ
(47)
where 119867119899
119894119895equiv 119867(119909
119899
119894 119909119899
119895) and 119876
119899
119894ℎequiv 119876(V119899
119894ℎ) Note that since
the feedback control 119899
ℎin (47) depends on the velocities at
time 119899 + 1 the constrained interaction at time 119899 is implicitlydefined The feedback controlled system in the discretizedform results in
V119899+1119894ℎ
= V119899119894ℎ
+Δ119905
119873
119873
sum
119895=1119867119899
119894119895
119872
sum
119898=0119899
119898ℎ(V119899119895119898
minus V119899119894119898
)
minusΔ119905
2
]119873
119873
sum
119895=1(V119899+1119895ℎ
minus V119889ℎ
) 119876119899
119895ℎ119876119899
119894ℎ
V119899119894ℎ
= V119894ℎ
(48)
Again the action of the control is substituted by animplicit term representing the relaxation toward the desiredcomponent of the velocity V
119889ℎ and it can be inverted in a fully
explicit systemConsidering the scaling for the regularization parameter
] = 120581Δ119905 the previous scheme is a consistent discretization ofthe following continuous system
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
(49)
Now the control is explicitly embedded in the dynamic ofthe ℎth component of the gPC approximation as a feedbackterm and the parameter 120581 gt 0 determines its strength
42 Choice of the Selective Control For the specific choice ofweight function 119876(sdot) equiv 1 we refer in general to nonselectivecontrol Note that in this case the action of the control is notstrong enough to control the velocity of each agent indeed inthis case we are able only to control the mean velocity of thesystem In fact the control term is reduced to
1120581
(V119889ℎ
minus Vℎ) (50)
where Vℎis the ℎth coefficient of the expansion ofV that is
Vℎ
=1119873
119873
sum
119895=1V119895ℎ (119905) (51)
Then only the projections of themean velocity are steeredtoward the respective components of the target velocity thatis as soon as 120581 rarr 0 it follows that V
ℎ= V119889ℎ Therefore
the choice of the selective function 119876(sdot) is of paramountimportance to ensure the action of the control on the singleagent
In principle one can address directly the control problemon the original system (1) as
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119876 (V119894 (120579 119905))
(52)
where the control term 119906 is solution of
119906 = argmin119906isinU119887
[12
int
119879
0
1119873
119873
sum
119894=1(V119894 (120579 119905) minus V
119889)2
119889119905
+]2
int
119879
0119906 (119905)
2119889119905]
(53)
Here V119889
isin R119889 is a target velocity ] gt 0 a regularizationparameter andU
119887the set of admissible control Similarly to
previous subsection through the approach presented in [89 22] we can derive the time-continuous MPC formulationwhich explicitly embed the control term in the dynamic asfollows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905)
=119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+1
120581119873
119873
sum
119895=1(V119889
minus V119895 (120579 119905)) 119876 (V
119895 (119905 120579)) 119876 (V119894 (119905 120579))
(54)
Mathematical Problems in Engineering 7
Now the gPC approximation of (54) can be obtained as inSection 3 and leads to the set of ODEs
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1119877ℎ
(V119872119894
V119872119895
)
(55)
where
119877ℎ
(V119872119894
V119872119895
) =1
1003817100381710038171003817Φℎ
10038171003817100381710038172E120579 [(V
119889minus V119872119895
) 119876 (V119872119894
(120579 119905))
sdot 119876 (V119872119895
(120579 119905)) Φℎ (120579)]
(56)
In general systems (55) and (49) without further assump-tions on the selective function 119876(sdot) are not equivalent Inaddition to the nonselective case there exists at least onechoice of selective control that makes the two approachestotally interchangeable In fact taking
119876 (V119894) =
V119889
minus V119894
radic(1119873) sum119873
119895=1 (V119889
minus V119895)2 (57)
and 119876(V119894) equiv 0 if V
119895= V119889 forall119895 = 1 119873 we have that 119876(sdot)
is bounded and the control term in (55) takes the followingform
1120581119873
119873
sum
119895=1119877ℎ
=1
1205811003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[(V119889
minus V119872119894
(120579 119905)) Φℎ (120579)]
=1120581
(V119889ℎ
minus V119894ℎ
)
(58)
Similarly the control term in (49) reduces to
1120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
=1120581
(V119889ℎ
minus V119894ℎ
)
(59)
and therefore system (55) coincides with (49) Note that as120581 rarr 0 both systems are driven towards the controlled stateV119894ℎ
= V119889ℎ
which implies a strong control over each singleagent
In Figure 1 we summarize the two equivalent approachesIn the case of nonselective control and of selective func-tion given by (57) the constrained gPC system can beobtained from our initial unconstrained model (1) throughtwo different but equivalent methods The first approximatesthe solution of the Cucker-Smale type model via the gPCprojection and then introduces a control on the coefficientsof the decomposition through a MPC approach in order
Model
Control problem
MPC
gPC
gPC
Control problem
MPC
ConstrainedgPC system
Figure 1 Sketch of the two numerical approaches to solve thecontrol problemwith uncertainty combiningMPCand gPC In bothcases of nonselective control that is 119876(sdot) equiv 1 and of selectivecontrol with 119876(sdot) defined in (57) the two approaches are equivalent
to steer each component to (V1198890 V1198891 V119889119872) whereas
the second method considers a constrained Cucker-Smaleproblem (52) introduces its continuousMPC approximationand then computes the gPC expansion of the resulting systemof constrained differential equations
Remark 4 We remark that the choice of 119876(sdot) stated in(57) for which the two approaches sketched in Figure 1 areidentical is equivalent to consider the constrained dynamic(52) modified as follows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119894
(60)
where the control term119906119894 for each agent 119894 = 1 119873 is given
by the minimization of the following functional
119869 (V1 V119873 1199061 119906119873)
=12
int
119879
0
1119873
119873
sum
119894=1[(V119894 (120579 119905) minus V
119889)2
+]2
119906119894 (119905)
2] 119889119905
(61)
Since the functional is strictly convex applying the (MPC)procedure on a single time interval for the discretizeddynamic of (60)-(61) we obtain 119906
119894in terms of feedback
control
119906119894=1120581
(V119889
minus V119894) 119894 = 1 119873 (62)
8 Mathematical Problems in Engineering
Erro
r102
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus12
10minus14
10minus160 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(a)
Erro
r
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus120 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(b)
Figure 2 Error convergence for increasing number of polynomials in the gPC decomposition approximation (a) Convergence of the meanerror at two fixed times 119879 = 1 and 119879 = 5 (b) Convergence of the variance error In both cases we considered a random time-independentscattering 119870(120579 119905) = 120579 where the random variable 120579 is normally distributed 119873(2 12) The system of ODEs is solved through a 4th-orderRunge-Kutta with Δ119905 = 10minus5
0 05 1 15 2 25 3 35 4 45 5
0
1
2
3
4
5
6
7
Varia
nce
Exact
times10minus3
minus1
t
M = 3
M = 4
M = 5
(a)
Erro
r
t
M = 3
M = 4
M = 5
100
10minus5
10minus10
10minus150 05 1 15 2 25 3 35 4
(b)
Figure 3 Evolution of the variance error 1198641205902 (119905) defined in (63) for the gPC decomposition for the unconstrained model (5) with 119870(120579 119905) =
120579 sim N(2 12) over the time interval [0 119879] with 119879 = 5 and time step Δ119905 = 10minus5
Thus the same considerations on the equivalence of theapproaches hold
5 Numerical Tests
We present some numerical experiments of the behaviorof the flocking model in the case of a Hermite polynomialchaos expansion This choice corresponds to the assumption
of a normal distribution for the stochastic parameter inthe Cucker-Smale type equation (1) and in its constrainedbehavior (49) Numerical results show that the introducedselective control with the weight function (57) is capableof driving the velocity to a desired state even in case ofa dynamic dependent on a normally distributed randominput with fixed or time-dependent variance In the uniforminteraction case since the effect of agentsrsquo positions does not
Mathematical Problems in Engineering 9
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
Exact
M i
RK 4
(a)
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
M i
ExactRK 4
(b)
Figure 4 (a) Sixth-order Hermite gPC decomposition solved through a 4th-order Runge-Kutta (b) 10th-order Hermite gPC decompositionsolved through a 4th-order Runge-Kutta In both cases the final time considered is 119879 = 6 with time step Δ119905 = 10minus2
influence the alignment we report only the results of theagentsrsquo velocities
51 Unconstrained Case In Figures 2 and 3 we presentnumerical results for the convergence of the error using thegPC scheme described in (33) for119867 equiv 1 and solved through a4th-order Runge-Kutta method In particular Figure 2 showsthe behavior of the error with respect to increasing terms ofthe gPC decomposition Here we considered the average intime of the error for the mean and the variance at time 119905 gt 0in the 119871
1 norm
119864V (119905) =1119873
119873
sum
119894=1
100381610038161003816100381610038161003816100381610038161003816
V119894 (119905) minus V119872
119894(119905)
V119894 (119905)
100381610038161003816100381610038161003816100381610038161003816
1198641205902 (119905) =
1119873
119873
sum
119894=1
1003816100381610038161003816100381610038161003816100381610038161003816
1205902119894
(119905) minus 1205902119872119894
(119905)
1205902119894
(119905)
1003816100381610038161003816100381610038161003816100381610038161003816
(63)
where
1205902119894
(119905) = E120579
[(V119894 (120579 119905) minus V
119894 (119905))2] (64)
with V119894(120579 119905) and V
119894(119905) defined in (6) and (8) Observe that if
the scattering rate 119870(120579 119905) is of the from described in (7) withℎ(sdot) equiv 1 and 119896(120579) sim N(120583 120590
2) then in addition to the explicit
evolution for the expected velocity as in (9) we can obtain theexact version for the evolution of the variance of the 119894th agent
1205902119894
(119905) = (V119894 (0) minusV)
2
sdot (exp minus2120583119905 + 212059021199052 minus exp minus2120583119905 + 120590
21199052)
(65)
In (63) we indicated with 1205902119872119894
(119905) the approximatedvariance
1205902119872119894
(119905) =
119872
sum
ℎ=0V2119894ℎ
(119905)E120579 [Φℎ (120579)
2] minus V21198940 (119905) (66)
It is easily seen how the error decays spectrally forincreasing value of 119872 however the method is not capableof going above a certain accuracy and therefore for large 119872
a threshold effect is observed This can be explained by thelarge integration interval we have considered in the numericalcomputation and by the well-known loss of accuracy ofgPC for large times [19] In the case of the error of thevariance (Figure 3) the gPC approximation exhibits a slowerconvergence with respect to the convergence of the meanNext in Figure 4 we see how for large times the solutionof the differential equation (5) diverges and the numericalapproximation is capable of describing accurately its behavioronly through an increasing number of Hermite polynomials
52 Constrained Uniform Interaction Case In Figure 5 weshow different scenarios for the uniform interaction dynamicwith constraints In the first row we represent the solutionfor 119873 = 10 agents whose dynamic is described by (49) withV119889
= 1 different values of 120581 originate different controls onthe average of the system which however do not prevent thesystem from diverging In the second row we show the actionof selective control (57) It is evident that with this choicewe are able to control the system also in the case with highervariance
10 Mathematical Problems in Engineering
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(a)
0 1 2 3 4 5 6 7 8 9 1005
1
15
2
25
t
M i
Evolution with 120579 sim 119977(2 05)
120581 = infin
120581 = 1
120581 = 01
(b)
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(c)
0 1 2 3 4 5 6 7 8 9 10t
05
1
15
2
25
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 05)
(d)
Figure 5 Evolution of the uniform interaction alignment model (49) with 119873 = 10 agents at 119905 = 0 distributed around V = 2 with unitaryvariance depending on a normal random parameter Left column 120579 sim N(2 1) Right column 120579 sim N(2 05) The control term shows itsability to steer the system towards desired velocity V
119889= 1 with different intensities 120581 = 1 and 120581 = 01 when 120581 = infin the control has no
influence First row shows the action of the control acting just on the average velocity 119876 equiv 1 Second row shows the action of selective controlwith 119876(sdot) as in (57)
Observe that the numerical results are coherent with theexplicit solution of the controlled equation Let us considerthe time-independent scattering rate 119870(120579 119905) = 120579 sim N(120583 120590
2)
then from the equation
119889
119889119905V119894 (120579 119905) = 120579 (Vminus V
119894 (120579 119905)) +1120581
(V119889
minus V119894 (120579 119905)) (67)
we can compute the exact solution given V119894(120579 0) = V
119894(0)
V119894 (120579 119905)
=120581V120579 + V
119889
120581120579 + 1
+ (V119894 (0) minus
120581V120579 + V119889
120581120579 + 1) exp minus (120579 +
1120581
) 119905
(68)
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Now the gPC approximation of (54) can be obtained as inSection 3 and leads to the set of ODEs
119889
119889119905V119894ℎ (119905)
=1119873
119873
sum
119895=1119867 (119909119894 119909119895)
119872
sum
119898=0119898ℎ (119905) (V
119895119898 (119905) minus V119894119898 (119905))
+1
120581119873
119873
sum
119895=1119877ℎ
(V119872119894
V119872119895
)
(55)
where
119877ℎ
(V119872119894
V119872119895
) =1
1003817100381710038171003817Φℎ
10038171003817100381710038172E120579 [(V
119889minus V119872119895
) 119876 (V119872119894
(120579 119905))
sdot 119876 (V119872119895
(120579 119905)) Φℎ (120579)]
(56)
In general systems (55) and (49) without further assump-tions on the selective function 119876(sdot) are not equivalent Inaddition to the nonselective case there exists at least onechoice of selective control that makes the two approachestotally interchangeable In fact taking
119876 (V119894) =
V119889
minus V119894
radic(1119873) sum119873
119895=1 (V119889
minus V119895)2 (57)
and 119876(V119894) equiv 0 if V
119895= V119889 forall119895 = 1 119873 we have that 119876(sdot)
is bounded and the control term in (55) takes the followingform
1120581119873
119873
sum
119895=1119877ℎ
=1
1205811003817100381710038171003817Φℎ
10038171003817100381710038172E120579
[(V119889
minus V119872119894
(120579 119905)) Φℎ (120579)]
=1120581
(V119889ℎ
minus V119894ℎ
)
(58)
Similarly the control term in (49) reduces to
1120581119873
119873
sum
119895=1(V119889ℎ
minus V119895ℎ (119905)) 119876 (V
119895ℎ (119905)) 119876 (V119894ℎ (119905))
=1120581
(V119889ℎ
minus V119894ℎ
)
(59)
and therefore system (55) coincides with (49) Note that as120581 rarr 0 both systems are driven towards the controlled stateV119894ℎ
= V119889ℎ
which implies a strong control over each singleagent
In Figure 1 we summarize the two equivalent approachesIn the case of nonselective control and of selective func-tion given by (57) the constrained gPC system can beobtained from our initial unconstrained model (1) throughtwo different but equivalent methods The first approximatesthe solution of the Cucker-Smale type model via the gPCprojection and then introduces a control on the coefficientsof the decomposition through a MPC approach in order
Model
Control problem
MPC
gPC
gPC
Control problem
MPC
ConstrainedgPC system
Figure 1 Sketch of the two numerical approaches to solve thecontrol problemwith uncertainty combiningMPCand gPC In bothcases of nonselective control that is 119876(sdot) equiv 1 and of selectivecontrol with 119876(sdot) defined in (57) the two approaches are equivalent
to steer each component to (V1198890 V1198891 V119889119872) whereas
the second method considers a constrained Cucker-Smaleproblem (52) introduces its continuousMPC approximationand then computes the gPC expansion of the resulting systemof constrained differential equations
Remark 4 We remark that the choice of 119876(sdot) stated in(57) for which the two approaches sketched in Figure 1 areidentical is equivalent to consider the constrained dynamic(52) modified as follows
119894 (120579 119905) = V
119894 (120579 119905)
V119894 (120579 119905) =
119870 (120579 119905)
119873
119873
sum
119895=1119867 (119909119894 119909119895) (V119895 (120579 119905) minus V
119894 (120579 119905))
+ 119906119894
(60)
where the control term119906119894 for each agent 119894 = 1 119873 is given
by the minimization of the following functional
119869 (V1 V119873 1199061 119906119873)
=12
int
119879
0
1119873
119873
sum
119894=1[(V119894 (120579 119905) minus V
119889)2
+]2
119906119894 (119905)
2] 119889119905
(61)
Since the functional is strictly convex applying the (MPC)procedure on a single time interval for the discretizeddynamic of (60)-(61) we obtain 119906
119894in terms of feedback
control
119906119894=1120581
(V119889
minus V119894) 119894 = 1 119873 (62)
8 Mathematical Problems in Engineering
Erro
r102
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus12
10minus14
10minus160 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(a)
Erro
r
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus120 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(b)
Figure 2 Error convergence for increasing number of polynomials in the gPC decomposition approximation (a) Convergence of the meanerror at two fixed times 119879 = 1 and 119879 = 5 (b) Convergence of the variance error In both cases we considered a random time-independentscattering 119870(120579 119905) = 120579 where the random variable 120579 is normally distributed 119873(2 12) The system of ODEs is solved through a 4th-orderRunge-Kutta with Δ119905 = 10minus5
0 05 1 15 2 25 3 35 4 45 5
0
1
2
3
4
5
6
7
Varia
nce
Exact
times10minus3
minus1
t
M = 3
M = 4
M = 5
(a)
Erro
r
t
M = 3
M = 4
M = 5
100
10minus5
10minus10
10minus150 05 1 15 2 25 3 35 4
(b)
Figure 3 Evolution of the variance error 1198641205902 (119905) defined in (63) for the gPC decomposition for the unconstrained model (5) with 119870(120579 119905) =
120579 sim N(2 12) over the time interval [0 119879] with 119879 = 5 and time step Δ119905 = 10minus5
Thus the same considerations on the equivalence of theapproaches hold
5 Numerical Tests
We present some numerical experiments of the behaviorof the flocking model in the case of a Hermite polynomialchaos expansion This choice corresponds to the assumption
of a normal distribution for the stochastic parameter inthe Cucker-Smale type equation (1) and in its constrainedbehavior (49) Numerical results show that the introducedselective control with the weight function (57) is capableof driving the velocity to a desired state even in case ofa dynamic dependent on a normally distributed randominput with fixed or time-dependent variance In the uniforminteraction case since the effect of agentsrsquo positions does not
Mathematical Problems in Engineering 9
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
Exact
M i
RK 4
(a)
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
M i
ExactRK 4
(b)
Figure 4 (a) Sixth-order Hermite gPC decomposition solved through a 4th-order Runge-Kutta (b) 10th-order Hermite gPC decompositionsolved through a 4th-order Runge-Kutta In both cases the final time considered is 119879 = 6 with time step Δ119905 = 10minus2
influence the alignment we report only the results of theagentsrsquo velocities
51 Unconstrained Case In Figures 2 and 3 we presentnumerical results for the convergence of the error using thegPC scheme described in (33) for119867 equiv 1 and solved through a4th-order Runge-Kutta method In particular Figure 2 showsthe behavior of the error with respect to increasing terms ofthe gPC decomposition Here we considered the average intime of the error for the mean and the variance at time 119905 gt 0in the 119871
1 norm
119864V (119905) =1119873
119873
sum
119894=1
100381610038161003816100381610038161003816100381610038161003816
V119894 (119905) minus V119872
119894(119905)
V119894 (119905)
100381610038161003816100381610038161003816100381610038161003816
1198641205902 (119905) =
1119873
119873
sum
119894=1
1003816100381610038161003816100381610038161003816100381610038161003816
1205902119894
(119905) minus 1205902119872119894
(119905)
1205902119894
(119905)
1003816100381610038161003816100381610038161003816100381610038161003816
(63)
where
1205902119894
(119905) = E120579
[(V119894 (120579 119905) minus V
119894 (119905))2] (64)
with V119894(120579 119905) and V
119894(119905) defined in (6) and (8) Observe that if
the scattering rate 119870(120579 119905) is of the from described in (7) withℎ(sdot) equiv 1 and 119896(120579) sim N(120583 120590
2) then in addition to the explicit
evolution for the expected velocity as in (9) we can obtain theexact version for the evolution of the variance of the 119894th agent
1205902119894
(119905) = (V119894 (0) minusV)
2
sdot (exp minus2120583119905 + 212059021199052 minus exp minus2120583119905 + 120590
21199052)
(65)
In (63) we indicated with 1205902119872119894
(119905) the approximatedvariance
1205902119872119894
(119905) =
119872
sum
ℎ=0V2119894ℎ
(119905)E120579 [Φℎ (120579)
2] minus V21198940 (119905) (66)
It is easily seen how the error decays spectrally forincreasing value of 119872 however the method is not capableof going above a certain accuracy and therefore for large 119872
a threshold effect is observed This can be explained by thelarge integration interval we have considered in the numericalcomputation and by the well-known loss of accuracy ofgPC for large times [19] In the case of the error of thevariance (Figure 3) the gPC approximation exhibits a slowerconvergence with respect to the convergence of the meanNext in Figure 4 we see how for large times the solutionof the differential equation (5) diverges and the numericalapproximation is capable of describing accurately its behavioronly through an increasing number of Hermite polynomials
52 Constrained Uniform Interaction Case In Figure 5 weshow different scenarios for the uniform interaction dynamicwith constraints In the first row we represent the solutionfor 119873 = 10 agents whose dynamic is described by (49) withV119889
= 1 different values of 120581 originate different controls onthe average of the system which however do not prevent thesystem from diverging In the second row we show the actionof selective control (57) It is evident that with this choicewe are able to control the system also in the case with highervariance
10 Mathematical Problems in Engineering
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(a)
0 1 2 3 4 5 6 7 8 9 1005
1
15
2
25
t
M i
Evolution with 120579 sim 119977(2 05)
120581 = infin
120581 = 1
120581 = 01
(b)
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(c)
0 1 2 3 4 5 6 7 8 9 10t
05
1
15
2
25
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 05)
(d)
Figure 5 Evolution of the uniform interaction alignment model (49) with 119873 = 10 agents at 119905 = 0 distributed around V = 2 with unitaryvariance depending on a normal random parameter Left column 120579 sim N(2 1) Right column 120579 sim N(2 05) The control term shows itsability to steer the system towards desired velocity V
119889= 1 with different intensities 120581 = 1 and 120581 = 01 when 120581 = infin the control has no
influence First row shows the action of the control acting just on the average velocity 119876 equiv 1 Second row shows the action of selective controlwith 119876(sdot) as in (57)
Observe that the numerical results are coherent with theexplicit solution of the controlled equation Let us considerthe time-independent scattering rate 119870(120579 119905) = 120579 sim N(120583 120590
2)
then from the equation
119889
119889119905V119894 (120579 119905) = 120579 (Vminus V
119894 (120579 119905)) +1120581
(V119889
minus V119894 (120579 119905)) (67)
we can compute the exact solution given V119894(120579 0) = V
119894(0)
V119894 (120579 119905)
=120581V120579 + V
119889
120581120579 + 1
+ (V119894 (0) minus
120581V120579 + V119889
120581120579 + 1) exp minus (120579 +
1120581
) 119905
(68)
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Erro
r102
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus12
10minus14
10minus160 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(a)
Erro
r
100
10minus2
10minus4
10minus6
10minus8
10minus10
10minus120 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
M
T = 1
T = 5
(b)
Figure 2 Error convergence for increasing number of polynomials in the gPC decomposition approximation (a) Convergence of the meanerror at two fixed times 119879 = 1 and 119879 = 5 (b) Convergence of the variance error In both cases we considered a random time-independentscattering 119870(120579 119905) = 120579 where the random variable 120579 is normally distributed 119873(2 12) The system of ODEs is solved through a 4th-orderRunge-Kutta with Δ119905 = 10minus5
0 05 1 15 2 25 3 35 4 45 5
0
1
2
3
4
5
6
7
Varia
nce
Exact
times10minus3
minus1
t
M = 3
M = 4
M = 5
(a)
Erro
r
t
M = 3
M = 4
M = 5
100
10minus5
10minus10
10minus150 05 1 15 2 25 3 35 4
(b)
Figure 3 Evolution of the variance error 1198641205902 (119905) defined in (63) for the gPC decomposition for the unconstrained model (5) with 119870(120579 119905) =
120579 sim N(2 12) over the time interval [0 119879] with 119879 = 5 and time step Δ119905 = 10minus5
Thus the same considerations on the equivalence of theapproaches hold
5 Numerical Tests
We present some numerical experiments of the behaviorof the flocking model in the case of a Hermite polynomialchaos expansion This choice corresponds to the assumption
of a normal distribution for the stochastic parameter inthe Cucker-Smale type equation (1) and in its constrainedbehavior (49) Numerical results show that the introducedselective control with the weight function (57) is capableof driving the velocity to a desired state even in case ofa dynamic dependent on a normally distributed randominput with fixed or time-dependent variance In the uniforminteraction case since the effect of agentsrsquo positions does not
Mathematical Problems in Engineering 9
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
Exact
M i
RK 4
(a)
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
M i
ExactRK 4
(b)
Figure 4 (a) Sixth-order Hermite gPC decomposition solved through a 4th-order Runge-Kutta (b) 10th-order Hermite gPC decompositionsolved through a 4th-order Runge-Kutta In both cases the final time considered is 119879 = 6 with time step Δ119905 = 10minus2
influence the alignment we report only the results of theagentsrsquo velocities
51 Unconstrained Case In Figures 2 and 3 we presentnumerical results for the convergence of the error using thegPC scheme described in (33) for119867 equiv 1 and solved through a4th-order Runge-Kutta method In particular Figure 2 showsthe behavior of the error with respect to increasing terms ofthe gPC decomposition Here we considered the average intime of the error for the mean and the variance at time 119905 gt 0in the 119871
1 norm
119864V (119905) =1119873
119873
sum
119894=1
100381610038161003816100381610038161003816100381610038161003816
V119894 (119905) minus V119872
119894(119905)
V119894 (119905)
100381610038161003816100381610038161003816100381610038161003816
1198641205902 (119905) =
1119873
119873
sum
119894=1
1003816100381610038161003816100381610038161003816100381610038161003816
1205902119894
(119905) minus 1205902119872119894
(119905)
1205902119894
(119905)
1003816100381610038161003816100381610038161003816100381610038161003816
(63)
where
1205902119894
(119905) = E120579
[(V119894 (120579 119905) minus V
119894 (119905))2] (64)
with V119894(120579 119905) and V
119894(119905) defined in (6) and (8) Observe that if
the scattering rate 119870(120579 119905) is of the from described in (7) withℎ(sdot) equiv 1 and 119896(120579) sim N(120583 120590
2) then in addition to the explicit
evolution for the expected velocity as in (9) we can obtain theexact version for the evolution of the variance of the 119894th agent
1205902119894
(119905) = (V119894 (0) minusV)
2
sdot (exp minus2120583119905 + 212059021199052 minus exp minus2120583119905 + 120590
21199052)
(65)
In (63) we indicated with 1205902119872119894
(119905) the approximatedvariance
1205902119872119894
(119905) =
119872
sum
ℎ=0V2119894ℎ
(119905)E120579 [Φℎ (120579)
2] minus V21198940 (119905) (66)
It is easily seen how the error decays spectrally forincreasing value of 119872 however the method is not capableof going above a certain accuracy and therefore for large 119872
a threshold effect is observed This can be explained by thelarge integration interval we have considered in the numericalcomputation and by the well-known loss of accuracy ofgPC for large times [19] In the case of the error of thevariance (Figure 3) the gPC approximation exhibits a slowerconvergence with respect to the convergence of the meanNext in Figure 4 we see how for large times the solutionof the differential equation (5) diverges and the numericalapproximation is capable of describing accurately its behavioronly through an increasing number of Hermite polynomials
52 Constrained Uniform Interaction Case In Figure 5 weshow different scenarios for the uniform interaction dynamicwith constraints In the first row we represent the solutionfor 119873 = 10 agents whose dynamic is described by (49) withV119889
= 1 different values of 120581 originate different controls onthe average of the system which however do not prevent thesystem from diverging In the second row we show the actionof selective control (57) It is evident that with this choicewe are able to control the system also in the case with highervariance
10 Mathematical Problems in Engineering
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(a)
0 1 2 3 4 5 6 7 8 9 1005
1
15
2
25
t
M i
Evolution with 120579 sim 119977(2 05)
120581 = infin
120581 = 1
120581 = 01
(b)
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(c)
0 1 2 3 4 5 6 7 8 9 10t
05
1
15
2
25
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 05)
(d)
Figure 5 Evolution of the uniform interaction alignment model (49) with 119873 = 10 agents at 119905 = 0 distributed around V = 2 with unitaryvariance depending on a normal random parameter Left column 120579 sim N(2 1) Right column 120579 sim N(2 05) The control term shows itsability to steer the system towards desired velocity V
119889= 1 with different intensities 120581 = 1 and 120581 = 01 when 120581 = infin the control has no
influence First row shows the action of the control acting just on the average velocity 119876 equiv 1 Second row shows the action of selective controlwith 119876(sdot) as in (57)
Observe that the numerical results are coherent with theexplicit solution of the controlled equation Let us considerthe time-independent scattering rate 119870(120579 119905) = 120579 sim N(120583 120590
2)
then from the equation
119889
119889119905V119894 (120579 119905) = 120579 (Vminus V
119894 (120579 119905)) +1120581
(V119889
minus V119894 (120579 119905)) (67)
we can compute the exact solution given V119894(120579 0) = V
119894(0)
V119894 (120579 119905)
=120581V120579 + V
119889
120581120579 + 1
+ (V119894 (0) minus
120581V120579 + V119889
120581120579 + 1) exp minus (120579 +
1120581
) 119905
(68)
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
Exact
M i
RK 4
(a)
0 1 2 3 4 5 60
05
1
15
2
25
3
35
t
M i
ExactRK 4
(b)
Figure 4 (a) Sixth-order Hermite gPC decomposition solved through a 4th-order Runge-Kutta (b) 10th-order Hermite gPC decompositionsolved through a 4th-order Runge-Kutta In both cases the final time considered is 119879 = 6 with time step Δ119905 = 10minus2
influence the alignment we report only the results of theagentsrsquo velocities
51 Unconstrained Case In Figures 2 and 3 we presentnumerical results for the convergence of the error using thegPC scheme described in (33) for119867 equiv 1 and solved through a4th-order Runge-Kutta method In particular Figure 2 showsthe behavior of the error with respect to increasing terms ofthe gPC decomposition Here we considered the average intime of the error for the mean and the variance at time 119905 gt 0in the 119871
1 norm
119864V (119905) =1119873
119873
sum
119894=1
100381610038161003816100381610038161003816100381610038161003816
V119894 (119905) minus V119872
119894(119905)
V119894 (119905)
100381610038161003816100381610038161003816100381610038161003816
1198641205902 (119905) =
1119873
119873
sum
119894=1
1003816100381610038161003816100381610038161003816100381610038161003816
1205902119894
(119905) minus 1205902119872119894
(119905)
1205902119894
(119905)
1003816100381610038161003816100381610038161003816100381610038161003816
(63)
where
1205902119894
(119905) = E120579
[(V119894 (120579 119905) minus V
119894 (119905))2] (64)
with V119894(120579 119905) and V
119894(119905) defined in (6) and (8) Observe that if
the scattering rate 119870(120579 119905) is of the from described in (7) withℎ(sdot) equiv 1 and 119896(120579) sim N(120583 120590
2) then in addition to the explicit
evolution for the expected velocity as in (9) we can obtain theexact version for the evolution of the variance of the 119894th agent
1205902119894
(119905) = (V119894 (0) minusV)
2
sdot (exp minus2120583119905 + 212059021199052 minus exp minus2120583119905 + 120590
21199052)
(65)
In (63) we indicated with 1205902119872119894
(119905) the approximatedvariance
1205902119872119894
(119905) =
119872
sum
ℎ=0V2119894ℎ
(119905)E120579 [Φℎ (120579)
2] minus V21198940 (119905) (66)
It is easily seen how the error decays spectrally forincreasing value of 119872 however the method is not capableof going above a certain accuracy and therefore for large 119872
a threshold effect is observed This can be explained by thelarge integration interval we have considered in the numericalcomputation and by the well-known loss of accuracy ofgPC for large times [19] In the case of the error of thevariance (Figure 3) the gPC approximation exhibits a slowerconvergence with respect to the convergence of the meanNext in Figure 4 we see how for large times the solutionof the differential equation (5) diverges and the numericalapproximation is capable of describing accurately its behavioronly through an increasing number of Hermite polynomials
52 Constrained Uniform Interaction Case In Figure 5 weshow different scenarios for the uniform interaction dynamicwith constraints In the first row we represent the solutionfor 119873 = 10 agents whose dynamic is described by (49) withV119889
= 1 different values of 120581 originate different controls onthe average of the system which however do not prevent thesystem from diverging In the second row we show the actionof selective control (57) It is evident that with this choicewe are able to control the system also in the case with highervariance
10 Mathematical Problems in Engineering
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(a)
0 1 2 3 4 5 6 7 8 9 1005
1
15
2
25
t
M i
Evolution with 120579 sim 119977(2 05)
120581 = infin
120581 = 1
120581 = 01
(b)
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(c)
0 1 2 3 4 5 6 7 8 9 10t
05
1
15
2
25
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 05)
(d)
Figure 5 Evolution of the uniform interaction alignment model (49) with 119873 = 10 agents at 119905 = 0 distributed around V = 2 with unitaryvariance depending on a normal random parameter Left column 120579 sim N(2 1) Right column 120579 sim N(2 05) The control term shows itsability to steer the system towards desired velocity V
119889= 1 with different intensities 120581 = 1 and 120581 = 01 when 120581 = infin the control has no
influence First row shows the action of the control acting just on the average velocity 119876 equiv 1 Second row shows the action of selective controlwith 119876(sdot) as in (57)
Observe that the numerical results are coherent with theexplicit solution of the controlled equation Let us considerthe time-independent scattering rate 119870(120579 119905) = 120579 sim N(120583 120590
2)
then from the equation
119889
119889119905V119894 (120579 119905) = 120579 (Vminus V
119894 (120579 119905)) +1120581
(V119889
minus V119894 (120579 119905)) (67)
we can compute the exact solution given V119894(120579 0) = V
119894(0)
V119894 (120579 119905)
=120581V120579 + V
119889
120581120579 + 1
+ (V119894 (0) minus
120581V120579 + V119889
120581120579 + 1) exp minus (120579 +
1120581
) 119905
(68)
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(a)
0 1 2 3 4 5 6 7 8 9 1005
1
15
2
25
t
M i
Evolution with 120579 sim 119977(2 05)
120581 = infin
120581 = 1
120581 = 01
(b)
0 1 2 3 4 5 605
1
15
2
25
t
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 1)
(c)
0 1 2 3 4 5 6 7 8 9 10t
05
1
15
2
25
M i
120581 = infin
120581 = 1
120581 = 01
Evolution with 120579 sim 119977(2 05)
(d)
Figure 5 Evolution of the uniform interaction alignment model (49) with 119873 = 10 agents at 119905 = 0 distributed around V = 2 with unitaryvariance depending on a normal random parameter Left column 120579 sim N(2 1) Right column 120579 sim N(2 05) The control term shows itsability to steer the system towards desired velocity V
119889= 1 with different intensities 120581 = 1 and 120581 = 01 when 120581 = infin the control has no
influence First row shows the action of the control acting just on the average velocity 119876 equiv 1 Second row shows the action of selective controlwith 119876(sdot) as in (57)
Observe that the numerical results are coherent with theexplicit solution of the controlled equation Let us considerthe time-independent scattering rate 119870(120579 119905) = 120579 sim N(120583 120590
2)
then from the equation
119889
119889119905V119894 (120579 119905) = 120579 (Vminus V
119894 (120579 119905)) +1120581
(V119889
minus V119894 (120579 119905)) (67)
we can compute the exact solution given V119894(120579 0) = V
119894(0)
V119894 (120579 119905)
=120581V120579 + V
119889
120581120579 + 1
+ (V119894 (0) minus
120581V120579 + V119889
120581120579 + 1) exp minus (120579 +
1120581
) 119905
(68)
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
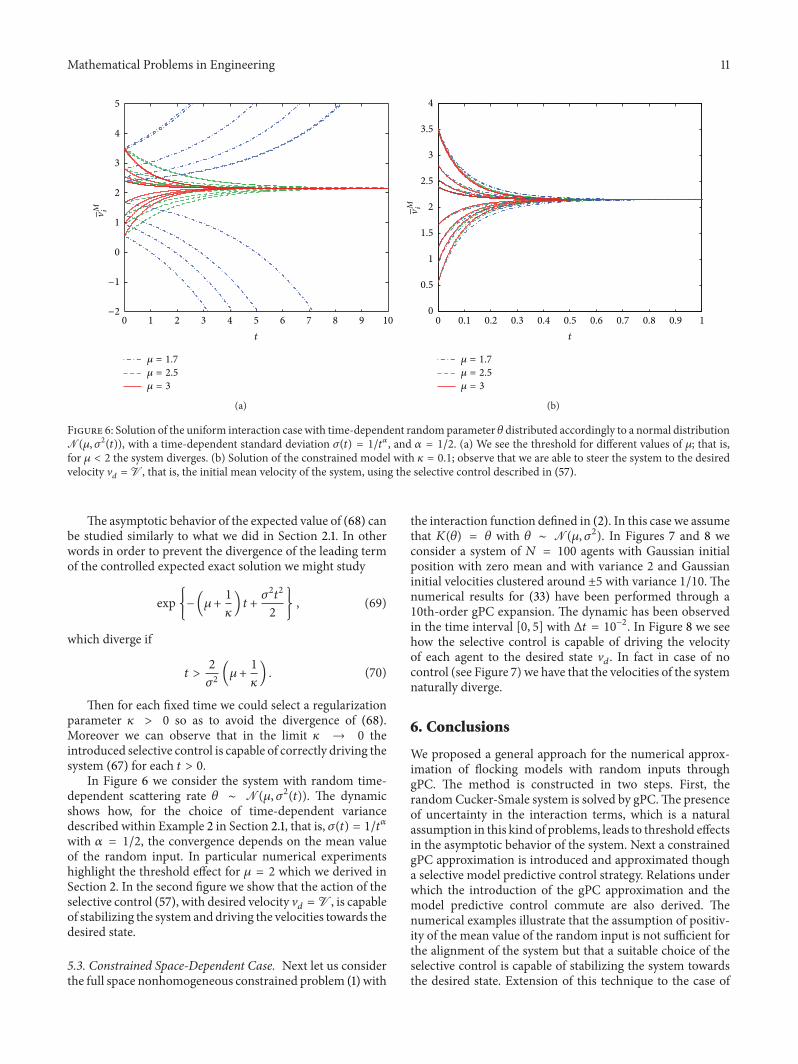
Mathematical Problems in Engineering 11
120583 = 17
120583 = 25
120583 = 3
5
4
3
2
1
0
minus1
minus2
t
0 1 2 3 4 5 6 7 8 9 10
M i
(a)
0 01 02 03 04 05 06 07 08 09 10
05
1
15
2
25
3
35
4
120583 = 17
120583 = 25
120583 = 3
t
M i
(b)
Figure 6 Solution of the uniform interaction case with time-dependent randomparameter 120579 distributed accordingly to a normal distributionN(120583 120590
2(119905)) with a time-dependent standard deviation 120590(119905) = 1119905
120572 and 120572 = 12 (a) We see the threshold for different values of 120583 that isfor 120583 lt 2 the system diverges (b) Solution of the constrained model with 120581 = 01 observe that we are able to steer the system to the desiredvelocity V
119889= V that is the initial mean velocity of the system using the selective control described in (57)
The asymptotic behavior of the expected value of (68) canbe studied similarly to what we did in Section 21 In otherwords in order to prevent the divergence of the leading termof the controlled expected exact solution we might study
expminus (120583 +1120581
) 119905 +12059021199052
2 (69)
which diverge if
119905 gt21205902 (120583 +
1120581
) (70)
Then for each fixed time we could select a regularizationparameter 120581 gt 0 so as to avoid the divergence of (68)Moreover we can observe that in the limit 120581 rarr 0 theintroduced selective control is capable of correctly driving thesystem (67) for each 119905 gt 0
In Figure 6 we consider the system with random time-dependent scattering rate 120579 sim N(120583 120590
2(119905)) The dynamic
shows how for the choice of time-dependent variancedescribed within Example 2 in Section 21 that is 120590(119905) = 1119905
120572
with 120572 = 12 the convergence depends on the mean valueof the random input In particular numerical experimentshighlight the threshold effect for 120583 = 2 which we derived inSection 2 In the second figure we show that the action of theselective control (57) with desired velocity V
119889= V is capable
of stabilizing the system anddriving the velocities towards thedesired state
53 Constrained Space-Dependent Case Next let us considerthe full space nonhomogeneous constrained problem (1) with
the interaction function defined in (2) In this case we assumethat 119870(120579) = 120579 with 120579 sim N(120583 120590
2) In Figures 7 and 8 we
consider a system of 119873 = 100 agents with Gaussian initialposition with zero mean and with variance 2 and Gaussianinitial velocities clustered around plusmn5 with variance 110 Thenumerical results for (33) have been performed through a10th-order gPC expansion The dynamic has been observedin the time interval [0 5] with Δ119905 = 10minus2 In Figure 8 we seehow the selective control is capable of driving the velocityof each agent to the desired state V
119889 In fact in case of no
control (see Figure 7) we have that the velocities of the systemnaturally diverge
6 Conclusions
We proposed a general approach for the numerical approx-imation of flocking models with random inputs throughgPC The method is constructed in two steps First therandomCucker-Smale system is solved by gPCThe presenceof uncertainty in the interaction terms which is a naturalassumption in this kind of problems leads to threshold effectsin the asymptotic behavior of the system Next a constrainedgPC approximation is introduced and approximated thougha selective model predictive control strategy Relations underwhich the introduction of the gPC approximation and themodel predictive control commute are also derived Thenumerical examples illustrate that the assumption of positiv-ity of the mean value of the random input is not sufficient forthe alignment of the system but that a suitable choice of theselective control is capable of stabilizing the system towardsthe desired state Extension of this technique to the case of
12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
15
10
5
0
minus5
minus10
minus15151050minus5minus10minus15
(f) 119905 = 5
Figure 7 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 10th-order gPC Hermite decomposition (33) with 120581 = infin
with time step Δ119905 = 10minus2 The random input is normally distributed 120579 sim N(2 1)
Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(a) 119905 = 0
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(b) 119905 = 1
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(c) 119905 = 2
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(d) 119905 = 3
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(e) 119905 = 4
Position
Velo
city
10
8
6
4
2
0
minus10
minus8
minus6
minus4
minus2
151050minus5minus10minus15
(f) 119905 = 5
Figure 8 Numerical solution of (49) with 120574 = 005 lt 12 120577 = 001 through a 6th-order gPC Hermite decomposition for the selectivecontrol (33) with time step Δ119905 = 10minus2 Here we considered a normally distributed random input 120579 sim N(2 1) the desired velocity is V
119889= 0
and the control parameter is 120581 = 1
14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Mathematical Problems in Engineering
a large number of interacting agents through mean-field andBoltzmann approximations is actually under study
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Giacomo Albi acknowledges the support of the ERC-Starting Grant High-Dimensional Sparse Optimal Control(HDSPCONTR-306274)
References
[1] L Pareschi and G Toscani Interacting Multiagent SystemsKinetic Equations amp Monte Carlo Methods Oxford UniversityPress New York NY USA 2013
[2] C W Reynolds ldquoFlocks herds and schools a distributedbehavioral moderdquo Computer Graphics vol 21 no 4 pp 25ndash341987
[3] T Vicsek A Czirok E Ben-Jacob I Cohen and O ShochetldquoNovel type of phase transition in a system of self-drivenparticlesrdquo Physical Review Letters vol 75 no 6 pp 1226ndash12291995
[4] G Albi D Balague J A Carrillo and J von Brecht ldquoStabilityanalysis of flock and mill rings for second order models inswarmingrdquo SIAM Journal on Applied Mathematics vol 74 no3 pp 794ndash818 2014
[5] J A Carrillo M Fornasier J Rosado and G Toscani ldquoAsymp-totic flocking dynamics for the kinetic Cucker-Smale modelrdquoSIAM Journal on Mathematical Analysis vol 42 no 1 pp 218ndash236 2010
[6] S Motsch and E Tadmor ldquoHeterophilious dynamics enhancesconsensusrdquo SIAM Review vol 56 no 4 pp 577ndash621 2014
[7] H Zhou W Zhou and W Zeng ldquoFlocking control of multiplemobile agents with the rules of avoiding collisionrdquoMathemati-cal Problems in Engineering In press
[8] G Albi M Herty and L Pareschi ldquoKinetic description of opti-mal control problems in consensusmodelingrdquoCommunicationsin Mathematical Sciences vol 13 no 6 pp 1407ndash1429 2015
[9] GAlbi L Pareschi andMZanella ldquoBoltzmann-type control ofopinion consensus through leadersrdquo Philosophical Transactionsof the Royal Society A vol 372 no 2028 2014
[10] F Cucker and S Smale ldquoEmergent behavior in flocksrdquo IEEETransactions on Automatic Control vol 52 no 5 pp 852ndash8622007
[11] P Degond J-G Liu and C Ringhofer ldquoLarge-scale dynamicsof mean-field games driven by local Nash equilibriardquo Journal ofNonlinear Science vol 24 no 1 pp 93ndash115 2014
[12] P Degond M Herty and J G Liu ldquoMean-field games andmodel predictive controlrdquo httparxivorgabs14127517
[13] S Motsch and E Tadmor ldquoA new model for self-organizeddynamics and its flocking behaviorrdquo Journal of StatisticalPhysics vol 144 no 5 pp 923ndash947 2011
[14] S M Ahn and S-Y Ha ldquoStochastic flocking dynamics of theCucker-Smale model with multiplicative white noisesrdquo Journalof Mathematical Physics vol 51 no 10 Article ID 103301 2010
[15] S-Y Ha K Lee and D Levy ldquoEmergence of time-asymptoticflocking in a stochastic Cucker-Smale systemrdquoCommunicationsin Mathematical Sciences vol 7 no 2 pp 453ndash469 2009
[16] Y Sun ldquoMean square consensus for uncertain multiagentsystems with noises and delaysrdquo Abstract and Applied Analysisvol 2012 Article ID 621060 18 pages 2012
[17] C A Yates R Erban C Escudero et al ldquoInherent noise canfacilitate coherence in collective swarm motionrdquo Proceedings ofthe National Academy of Sciences of the United States of Americavol 106 no 14 pp 5464ndash5469 2009
[18] D XiuNumerical Methods for Stochastic Computations Prince-ton University Press Princeton NJ USA 2010
[19] M Gerritsma J-B van der Steen P Vos and G KarniadakisldquoTime-dependent generalized polynomial chaosrdquo Journal ofComputational Physics vol 229 no 22 pp 8333ndash8363 2010
[20] R H Cameron and W T Martin ldquoTransformations of Wienerintegrals under translationsrdquoAnnals ofMathematics vol 45 no2 pp 386ndash396 1944
[21] D Xiu and G E Karniadakis ldquoThe Wiener-Askey polynomialchaos for stochastic differential equationsrdquo SIAM Journal onScientific Computing vol 24 no 2 pp 619ndash644 2002
[22] G Albi and L Pareschi ldquoMean-field selective control of flockingdynamicsrdquo In preparation
[23] H Michalska and D Q Mayne ldquoRobust receding horizoncontrol of constrained nonlinear systemsrdquo IEEETransactions onAutomatic Control vol 38 no 11 pp 1623ndash1633 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of