research article hybrid recurrent laguerre-orthogonal...
TRANSCRIPT

Research ArticleHybrid Recurrent Laguerre-Orthogonal-Polynomial NNControl System Applied in V-Belt Continuously VariableTransmission System Using Particle Swarm Optimization
Chih-Hong Lin
Department of Electrical Engineering National United University No 1 Lienda Kung-Jing Li Miaoli CityMiaoli County 36003 Taiwan
Correspondence should be addressed to Chih-Hong Lin jhlinnuuedutw
Received 18 May 2014 Accepted 1 September 2014
Academic Editor Kang Li
Copyright copy 2015 Chih-Hong Lin This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Because the V-belt continuously variable transmission (CVT) system driven by permanent magnet synchronous motor (PMSM)has much unknown nonlinear and time-varying characteristics the better control performance design for the linear controldesign is a time consuming procedure In order to overcome difficulties for design of the linear controllers the hybrid recurrentLaguerre-orthogonal-polynomial neural network (NN) control system which has online learning ability to respond to the systemrsquosnonlinear and time-varying behaviors is proposed to control PMSM servo-driven V-belt CVT system under the occurrence ofthe lumped nonlinear load disturbances The hybrid recurrent Laguerre-orthogonal-polynomial NN control system consists ofan inspector control a recurrent Laguerre-orthogonal-polynomial NN control with adaptive law and a recouped control withestimated law Moreover the adaptive law of online parameters in the recurrent Laguerre-orthogonal-polynomial NN is derivedusing the Lyapunov stability theorem Furthermore the optimal learning rate of the parameters by means of modified particleswarm optimization (PSO) is proposed to achieve fast convergence Finally to show the effectiveness of the proposed controlscheme comparative studies are demonstrated by experimental results
1 Introduction
A V-belt continuously variable transmission (CVT) [1ndash8] istypically composed of two hydraulically or spring actuatedvariable radii pulleys and a chain or metal pushing beltTo launch a vehicle from rest the input pulley radius willbe smaller than the output pulley radius resulting in aspeed reduction and torque multiplication transmitted tothe drive shaft For increased output shaft speed the pulleyradii are inversely manipulated simultaneously (ie inputpulley radius increases as the output pulley radius decreases)to maintain constant belt length A CVT may operate at aspecific speed while changing the pulleysrsquo radii to achievetorque multiplication acceleration and speed as per thevehiclersquos velocity load requirements engine power and gearratios This operating profile provides the research motiva-tion for CVT dynamics and nonlinear control algorithmsCVT-based vehicles have been traditionally regulated usinga standard proportional integral derivative- (PID-) based
controller with measurements of the gear ratio [3] It hasalso been demonstrated that this control strategy providessatisfactory performance using gain-scheduling with a largeset of points In addition numerous fuzzy logic controllers[4] have also been proposed However V-belt continuouslyvariable transmission (CVT) system driven by alternatingcurrent (AC) motor is yet not shown in any commercialreports so that it provides the research motivation in thisstudy
The AC motor has several types such as permanentmagnet synchronous motor (PMSM) switched reluctancemotor (SRM) and induction motor (IM) In order to selectthe appropriateACmotor for drivenV-belt CVT system highefficiency is one of themost important factories to be selectedThe PMSM provides higher efficiency higher power densityand lower power loss for their size compared to SRM and IMIn addition field-oriented control is one the most popularcontrol techniques for the PMSM servo-driven system Asa result torque ripple of the PMSM is lower than the SRM
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 106707 17 pageshttpdxdoiorg1011552015106707
2 Mathematical Problems in Engineering
and IM On the other hand the PMSM controlled by field-oriented control which can be achieved fast by four-quadrantoperation is much less sensitive to the parameters variationof the motor [9ndash11] Therefore the PMSM has been widelyused inmany industrial applications such as robotics electricpower steering and other mechatronics [9ndash11]
Artificial neural networks (ANNs) have emerged asa powerful learning technique to perform complex taskssuch as highly nonlinear approximations and the control ofdynamical systems [12ndash16] Some of the prime advantages ofusingNNare their ability to learn based on optimization of anappropriate error function and their excellent performancefor approximation of nonlinear functionsThere are differentparadigms of NNs proposed by different researchers for thetasks of system identifications and controls [13ndash16] One ofthe major drawbacks of the NN is that it is computation-ally intensive and needs large number of iterations for itstraining In order to reduce the computational complexitya functional-link NN which has shown that it is capableof producing similar performance as that of NN but withmuch less computational cost was reported in [17ndash19] Thesefunctional-link NNs [17ndash19] with faster convergence andlesser computational complexity were executed in the identi-fication and controls of nonlinear dynamic system with satis-factory results Recently the Laguerre-functional-expansionscombined with NN which was applied in highly nonlinearapproximations and the control of dynamical systems havebeen proposed [20ndash24] Aadaleesan et al [20] proposed theLaguerre filter combined with the wavelet network in orderto approximate the memoryless nonlinearity Approximationthe linear and nonlinear parts of a Wiener structure bymeans of the Laguerre filter and the general feed-forwardNNwas reported in [21] The Laguerre-functional-expansionsfeed-forward NN which employed Laguerre-orthogonal-polynomials in the activation functions of the hidden neu-rons in order to identify models of the chaotic time serieswas proposed by Zou andXiao [22] Patra et al [23] proposeda computationally efficient Laguerre NN which is based onLaguerre-functional-expansions to autocompensate for theassociated nonlinearity and environmental dependence forintelligent sensors and provide linearized sensor readouteven when the motes are operated in harsh environmentsPatra et al [24] present an intelligent technique by means ofnovel computationally efficient Laguerre NN to compensatefor the inherent sensor nonlinearity and the environmentalinfluences Since the Laguerre NN is a single-layer NN itscomputational complexity is found to be much lower thana multilayer perception (MLP) However these Laguerre-functional-expansions feed-forward NNs without a feedbackloops can be used for static function approximation but theycannot adequately approximate dynamic behaviors found inPMSM servo-driven V-belt CVT system with nonlinear andtime-varying characteristics
The recurrent NN has received increasing attention dueto its structural advantage in the modelling of the nonlinearsystem and dynamic control of the system [25ndash29] Thesenetworks are capable of effective identification and controlof complex process dynamics but with the expense of largecomputational complexity Hence if each neuron in the
recurrent NN is considered as a state in the nonlineardynamic systems the self-connection feedback type is ableto approximate the dynamic systems efficiently [25ndash29]In order to improve the ability of identifying high ordersystems and reduce computational complexity the recur-rent Laguerre-orthogonal-polynomial NN which has moreadvantages than the Laguerre-orthogonal-polynomial NNincluding better performance higher accuracy and dynamicrobustness has been proposed to control the PMSM servo-driven V-belt CVT system with nonlinear and time-varyingcharacteristics in this paper
Particular swarm optimization (PSO) is a population-based self-adaptive search optimization technique first intro-duced by Kennedy and Eberhart [30] Similar to geneticalgorithms [31] an evolutionary algorithm approach thePSO is an evolutionary optimization tool of swarm intel-ligence field based on a swarm (population) where eachmember is seen as a particle and each particle is a potentialsolution to the problem under analysis The motivationfor the development of this method was based on thesimulation of simplified animal social behaviors such as fishschooling bird flocking and so forth However unlike inother evolutionary optimization methods in PSO there is nodirect recombination of genetic material between individualsduring the search The PSO algorithm works on the socialbehavior of particles in the swarm Therefore it finds theglobal best solution by simply adjusting the trajectory of eachindividual toward its own best location and toward the bestparticle of the entire swarm at each time step (generation)[30 32] Clerc and Kennedy [32] introduced the concept ofinertia weight to the original version of PSO in order tobalance the local and global search during the optimizationprocess Thus PSO has been widely applied in mathematicalmodeling dynamic programming and system control [33ndash36] due to simple structure simple parameter setting andfast convergence speed How to improve the convergencespeed and how to guarantee the convergence of PSO are themain problems of PSO improvement [37] and are graduallyturning into a hot topic in this field In order to weigh therelationship between local search and global search Clercand Kennedy [32] and Eberhart and Shi [38 39] proposedimproved particle swarm optimization with inertial weightto control the exploitation and explorationMeanwhile someresearchers [40ndash42] have proposed the topical improvedparticle swarm algorithm with inertia factor which is calledtopical particle swarm optimization However the PSOexisted in premature convergence problem and the modifiedPSO is proposed to prevent premature convergence and toacquire optimal learning rate with better convergence in thispaper
In this study the hybrid recurrent Laguerre-orthogonal-polynomial NN control system is developed to control theV-belt CVT system with many nonlinear dynamics [1ndash843ndash46] which is driven by PMSM The hybrid recurrentLaguerre-orthogonal-polynomial NN control system has fastlearning property and good generalization capability Thecontrol method which is not dependent upon the prede-termined characteristics of the motor can adapt to anychange in the motor characteristics The hybrid recurrent
Mathematical Problems in Engineering 3
Laguerre-orthogonal-polynomial NN control system whichis composed of the inspector control the recurrent Laguerre-orthogonal-polynomial NN control with adaptive law andthe recouped control is applied to the V-belt CVT systemdriven by PMSM The adaptive law of the online parameterin the recurrent Laguerre-orthogonal-polynomial NN canbe derived according to the Lyapunov stability theoremand the gradient descent method The recurrent Laguerre-orthogonal-polynomial NN has the online learning ability torespond to the systemrsquos nonlinear and time-varying behaviorsunder the occurrence of the lumped nonlinear externaldisturbances with parameters variation Furthermore twooptimal learning rates of the parameters by means of mod-ified PSO are proposed to achieve fast convergence Finallythe control performances of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are ver-ified by experimental results
The paper is structured as follows Section 2 providesthe configuration of the V-belt CVT system driven byPMSM Section 3 develops the proposed novel hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemfor controlling the V-belt CVT system driven by PMSMSection 4 presents the experimental results for comparisonsbetween the proposed controlmethod and PI controlmethodat three cases Section 5 provides the conclusions
2 Configuration of System
Since the electric scooter system has much unknown non-linear uncertainties and parameter variations such as loadtorque rolling resistance wind resistance and braking forcethe V-belt CVT and clutch in the scooter model can becategorized as functioning in one of two operating modesdepending on the speed of the V-belt CVT output axisdisengaged or completely coupled At the start of the PMSMdrive cycles the scooter is in an idle state The clutchis initially disengaged and subsequent transition betweenmodes is controlled by the clutch axis rotational speed Exceptfor the mechanical losses the PMSM power is transmittedthrough theV-belt CVT and clutch to thewheel in the electricscooter
21 Structure of the V-Belt CVT SystemDriven by PMSM Thedevelopment of the V-belt CVT began with rubber V-belts[5] Despite the fact that rubber V-belt CVTs are not wellsuited for automotive applications because of their limitedtorque capacity there are some interesting concepts on themarket The V-belt CVT consists of a segmented rubber V-belt and two shaftswith conical pulleysTheV-belt is clampedbetween two pairs of conical sheaves In the V-belt CVT thetransmission ratio is determined by simultaneous adjustmentof the running radii of the belt on the pulleys On each shaftthere is one fixed and one axially moveable sheave Axialmovement of the moveable sheave adjusts the gap betweenthe sheaves and thereby the belt running radius The inputshaft of the V-belt CVT is called the primary shaft whichmounted the PMSM and the output shaft is the secondaryshaft which mounted the wheel The structure of the V-belt
CVT is shown in Figure 1 The appearance of the primarypulley side and the secondary pulley side in the V-belt CVTis shown in Figure 1(a) and the cross-section view of thesecondary shaft in the V-belt CVT is shown in Figure 1(b)The wheel of electric scooter is connected to the outputshaft of the final reduction using a torsion spring whichmodels the combined stiffness of both the drive shafts Theelectric scooter inertia is connected to the wheel using lineardamper which models the tire force The rolling resistanceon the electric scooter is modeled as a load torque In orderto reduce system complexity the torque dynamic equationsin the primary drive shaft and the secondary drive shaftof the V-belt CVT shown in Figure 2 can be simplified as[1ndash8]
119869119901119903 + 119861119901120596119903 + 119879119901 = 119879119890
119879119904 = 119869119904119904 + 119861119904120596119904 + 119879119904
119897(119865119897 (119861119892) 120592119886 (V119903 119861119892) 120591119886 (V119903) 120596
2
119904)
(1)
in which 119879119904119897(119865119897(119861119892) 120592119886(V119903 119861119892) 120591119886(V119903) 120596
2
119904) [1ndash8] is the lumped
nonlinear external disturbances of the secondary drive sideon the wheel 119879119901 = 120590119904120596119904119879119904120596119903 is the drive torque of theprimary pulley shaft 119879119904 is the drive torque of the secondarypulley shaft 120590119904 is the conversion ratio with respect tosecondary pulley shaft transferred to primary pulley shaft ofV-belt arc length 120592119886(V119903 119861119892) is the rolling resistance 120591119886(V119903) isthe wind resistance 119865119897(119861119892) is a braking force V119903 is the totalwind velocity 119861119892 represents the total frictional coefficient ofground surface 119861119901 and 119861119904 represent the viscous frictionalcoefficients of the PMSM and the wheel respectively 119869119901 and119869119904 are the inertias of the PMSM and the wheel respectively120596119903 and 120596119904 are the speeds of the PMSM and the wheelrespectively Then using speed ratio and sliding ratio [1ndash8]the torque equation can be transformed from the secondarypulley side to the primary pulley sideTherefore the resultantdynamic equation of the PMSM driven V-belt CVT systemfrom (1) can be simplified as [1ndash8 41ndash45]
119869119903119903 + 119861119903120596119903 + 119879119897 (119879119886 Δ119879119901 119865119897 (119861119892) 120592119886 (V119903 119861119892) 120591119886 (V119903) 1205962
119903)
= 119879119890
(2)
in which 119879119897(119879119886 Δ119879119901 119865119897(119861119892) 120592119886(V119903 119861119892) 120591119886(V119903) 1205962
119903) = 119879119886 +
Δ119879119901 + 119879un [1ndash8] is the resultant lumped nonlinear externaldisturbances with parameter variations 119879119886 is the fixed loadtorque Δ119879119901 = Δ119869119903119903 + Δ119861119903120596119903 is the resultant parametervariation 120592119886(V119903 119861119892) is the resultant rolling resistance 120591119886(V119903) isthe resultant wind resistance 119865119897(119861119892) is the resultant brakingforce 119879un = 119865119897(119861119892) + 120592119886(V119903 119861119892) + 120591119886(V119903)120596
2
119903is the resultant
unknown nonlinear load torque 119861119903 is the resultant viscousfrictional coefficient 119869119903 is the resultant moment of inertia
22 Structure of the PMSM Driven System For convenientdesign the stator voltage equations of the PMSM driven
4 Mathematical Problems in Engineering
Primary
Secondary driven shaft(mounted wheel) Secondary pulley plate
V-beltSecondary
Primary
(mounted PMSM)
Primary
Primary pulley side
Secondary pulley side
pulley faces
pulley plate
pulley face
driving shaft
(a)
V-beltSecondary pulley faces
Cam
Axial cam force
Secondary driven shaft (mounted wheel)
Secondary pulley shaft
Slide bushings
Belt tension force
Springs
Secondary pulley plate
(b)
Figure 1 Structure of the V-belt CVT system (a) appearance of the primary pulley side and the secondary pulley side (b) cross-section viewof the secondary shaft
V-belt CVT system
V-belt
Primarypulley side
Secondarypulley side
Primarydriving
shaft
Secondarydrivenshaft
PMSM Je
Js Wheel
Te 120596r Bp
Bs Tsl 120596s
Figure 2 Schematic of the PMSM-wheel connection through theV-belt CVT system
V-belt CVT system in the synchronously rotating referenceframe can be described as follows [9ndash11 42ndash45]
V119902119903 = 119877119903119894119902119903 + 119871119902119903 119894119902119903 + 120596119891 (119871119889119903119894119889119903 + 120582119891119889)
V119889119903 = 119877119903119894119889119903 + 119871119889119903 119894119889119903 minus 120596119891119871119902119903119894119902119903(3)
in which V119902119903 and V119889119903 are the 119889-axis and 119902-axis stator voltages119894119902119903 and 119894119889119903 are the 119889-axis and 119902-axis stator currents 119871119902119903and 119871119889119903 are the 119889-axis and 119902-axis stator inductances 120582119891119889 isthe 119889-axis permanent magnet flux linkage 119877119903 is the statorresistance 120596119891 = 1198751199031205961199032 is the electrical angular speed
The electromagnetic torque119879119890 of the PMSMdrivenV-beltCVT system can be described as
119879119890 =3119875119903 [120582119891119889119894119902119903 + (119871119889119903 minus 119871119902119903) 119894119889119903119894119902119903]
4 (4)
in which 119875119903 is the number of poles Due to 119871119889119903 = 119871119902119903 fora surface-mounted PMSM the second term of (4) is zero
Moreover 120582119891119889 is a constant for surface-mounted PMSMTherotor flux is produced in the 119889-axis only while the currentvector is generated in the 119902-axis for the field-oriented controlWhen the 119889-axis rotor flux is a constant and torque angle is1205872 [9ndash11] the maximum torque per ampere can be reachedfor the field-oriented control The electromagnetic torque 119879119890is linearly proportional to the 119902-axis current 119894119902119903 which isdetermined by closed-loop control The control principle ofthe PMSM driven system is based on field orientation ThePMSMdrivenV-belt CVT systemwith the implementation offield-oriented control can be reduced as 119879119890 = 119896119903119894119902119903 in which119896119903 = 31198751199031205821198911198894 is the torque constant The block diagram ofthe V-belt CVT system driven by PMSM is shown in Figure 3
The whole system of the PMSM driven V-belt CVT sys-tem can be indicated as follows a field-oriented institutiona current PI control loop a sinusoidal PWM control circuitan interlock circuit and an isolated circuit an IGBT powermodule inverter and a speed control loop The PI currentloop controller is the current loop tracking controller Inorder to attain good dynamic response all gains for well-known PI current loop controller are listed as follows 119896pc =95 and 119896ic = 119896pc119879ic = 28 through some heuristicknowledge [47ndash50] on the tuning of the PI controller Thefield-oriented institution consists of the coordinate transfor-mation sin 120579119891 cos 120579119891 generation and lookup table genera-tion The TMS320C32 DSP control system manufactured bySpinel Technology Corporation is used to implement field-oriented control and speed control The V-belt CVT systemdriven by PMSM is manipulated under the lumped externaldisturbances with nonlinear uncertainties
3 Design of Hybrid RecurrentLaguerre-Orthogonal-Polynomial NNControl System
Due tononlinear uncertainties of the V-belt CVT systemdriven by PMSM such as nonlinear friction force of the trans-mission belt and clutch rolling resistance wind resistanceand braking force these will lead to degeneration of trackingresponses in command current and speed of the V-belt CVT
Mathematical Problems in Engineering 5
PMSM
C
IGBT powermoduleinverter
SinusoidalPWM circuit
Interlock andisolated circuits
Current sensorscircuit
and ADconverter
DC power
V-beltcontinuous
variabletransmission
system (CVT)
Wheel
Encoder
PMSM driven system
V-belt CVT system
PI currentloop
controller Hybrid recurrent Laguerre-
orthogonal-polynomial NN control system
Referencemodel
Field orientation and current loop control
Filter and
1 Calculation
2 Generation
with lookup
3 Coordinate translation(Clark and
Park)
Inverse coordinatetranslation (Park and Clark)
Limiter
TMS 320C32 DSP control system
Vdc = 48V
+
minus
+ minus
+ minus
ia ib ic
120579r
120579r
iqr
iqr
idr
idr = 0
1
kr
ue = Te
120596r
120596lowast
e
120596lowastr
d120579rdt
120579f = Pr120579r2
table
Σ
sin f120579cos f120579
Figure 3 Block diagram of the PMSM driven V-belt CVT system
system driven by PMSMThese nonlinear uncertainties causevariation of rotor inertia and friction for the V-belt CVTsystem driven by PMSM For convenient hybrid recurrentLaguerre-orthogonal-polynomial NN control system designthe dynamic equation of the V-belt CVT system driven byPMSM from (2) can be rewritten as
119903 = minus119861119903120596119903
119869119903minus119879119897 (119865119897 120592119886 120591119886 120596
2
119903)
119869119903+119896119903119894119902119903
119869119903
= 119860119886120596119903 + 119862119886119879119897 (119865119897 120592119886 120591119886 1205962
119903) + 119861119886119906119890
(5)
in which 119906119890 = 119879119890 is the control effort that is the commandtorque of the PMSM119860119886 = minus119861119903119869119903119861119886 = 1119869119903 and119862119886 = minus1119869119903are three known constantsWhen the uncertainties includingvariation of systemparameters and external force disturbanceoccur the parameters are assumed to be bounded that is
|119860119886120596119903| le 1198631(120596119903) |119862119886119879119897(119865119897 120592119886 120591119886 1205962
119903)| le 1198632 and 1198633 le 119861119886
where1198631(120596119903) is a known continuous function1198632 and1198633 aretwo known constantsThen the tracking error can be definedas
119890 = 120596lowastminus 120596119903 (6)
where 120596lowast represents the desired command rotor speed 119890is the tracking error between the desired rotor speed andactual rotor speed If all parameters of the V-belt CVT systemdriven by PMSM including the lumped nonlinear externaldisturbances and parameter variation are well known theideal control law can be designed as
119906lowast
119890=[lowast+ 1198961119890 minus 119860119886120596119903 minus 119862119886119879119897 (119865119897 120592119886 120591119886 120596
2
119903)]
119861119886 (7)
6 Mathematical Problems in Engineering
Recouped controller
Referencemodel
PMSM drive system and V-belt CVT driven system
Adaptivelaw
Field orientation and current loop
control
Inspectedcontroller
Lyapunovfunction
Operatorindex
Inspector control system
Filterand
Estimationlaw
Modified particleswarm optimization
Two optimal learning rates
Hybrid recurrent Laguerre-orthogonal-polynomial neural network control system
Recurrent Laguerre-orthogonal-polynomial
neural networkcontroller
+
120579r
120596r
120596lowast
e
e120596lowastr
d120579rdt
+
+
eΣ
+
minus
e
Σue = Te
Ba
Ba
12058311205832
Ψ
w2kj w1ik
1 minus zminus1Δe
urourl
ud
120578
Id
Q1
times
Figure 4 Block diagram of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system
in which 1198961 is a positive constant Substituting (6) into (4)the error dynamic equation can be obtained as follows
119890 + 1198961119890 = 0 (8)
The system state can track the desired trajectory graduallyif 119890(119905) rarr 0 as 119905 rarr infin in (8) However the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is proposed to control the CVT driven by PMSMunder uncertain perturbations The configuration of theproposed hybrid recurrent Laguerre-orthogonal-polynomialNN control system is described in Figure 4
The hybrid recurrent Laguerre-orthogonal-polynomialNN control system is composed of an inspector controlsystem a recurrent Laguerre-orthogonal-polynomial NNcontroller and a recouped controller The control law isdesigned as
119906119890 = 119906119889 + 119906rl + 119906ro (9)
where 119906119889 is the proposed inspected control that is able to sta-bilize around a predetermined bound area in the states of thecontrolled system 119906rl is the recurrent Laguerre-orthogonal-polynomial NN control which is as the major tracking con-troller It is used to imitate an ideal control lawThe recoupedcontrol 119906ro is designed to recoup the difference between the
ideal control law and the recurrent Laguerre-orthogonal-polynomial NN control Since the inspected control causedthe overdone and chattering effort the recurrent Laguerre-orthogonal-polynomial NN control and the recouped controlare proposed to reduce and smooth the control effort whenthe system states are inside the predetermined bound areaWhen the recurrent Laguerre-orthogonal-polynomial NNapproximation properties cannot be ensured the inspectedcontrol is able to act in this case
For the condition of divergence of states the design ofhybrid recurrent Laguerre-orthogonal-polynomial NN con-trol system is essential to stretch the divergent states back tothe predestinated bound areaThehybrid recurrent Laguerre-orthogonal-polynomial NN control system can uniformlyapproximate the ideal control law inside the bound areaThen stability of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system can be warranted An errordynamic equation from (5) to (9) can be acquired as
119890 = minus1198961119890 + [119906lowast
119890minus 119906119889 minus 119906rl minus 119906ro] 119861119886 (10)
Firstly the inspected control 119906119889 can be designed as
119906119889 =119868119889 sgn (119890119861119886) [1198631 (120596119903) + 1198632 +
1003816100381610038161003816lowast1003816100381610038161003816 +
100381610038161003816100381611989611198901003816100381610038161003816]
119861119886 (11)
Mathematical Problems in Engineering 7
Hiddenlayer
Outputlayer
Inputlayer i
j
k
y3k
zminus1 zminus1
zminus1zminus1zminus1
w1ik w1ik
w2kjw2kj
x1i
Σ Σ Σ
Σ
L0(middot) Lj(middot) Lnminus1(middot)
120573 120573 120573
e Δe
y2j = x3j
y1i = x2i
middot middot middot middot middot middot
Π Π
Figure 5 Structure of the three-layer recurrent Laguerre-orthogonal-polynomial NN
in which sgn(sdot) is a sign function When the recurrentLaguerre-orthogonal-polynomial NN approximation prop-erties cannot be ensured the inspected control law is ableto act in this case that is 119868119889 = 1 Due to the inadequatebound values for example1198631(120596119903)11986321198633 and sign functionthe inspected control can produce in overdone and chat-tering effort Therefore the recurrent Laguerre-orthogonal-polynomial NN control and the recouped control can bedevised to conquer the mentioned blemish The recurrentLaguerre-orthogonal-polynomial NN control raised to imi-tate the ideal control 119906lowast
119890 Then the recouped control posed
to recoup the difference between the ideal control 119906lowast119890and
the recurrent Laguerre-orthogonal-polynomial NN control119906rl
Secondly the architecture of the proposed three-layerrecurrent Laguerre-orthogonal-polynomial NN is depictedin Figure 5 It is composed of an input layer a hidden layerand an output layer The activation functions and signalactions of nodes in each layer of the recurrent Laguerre-orthogonal-polynomial NN can be described as follows
First Layer Input Layer Each node 119894 in this layer is indicatedby using Π which multiplies by each other between eachother for input signals Then outputs signals are the resultsof product The input and the output for each node 119894 in thislayer are expressed as
nod1119894= prod
119896
1199091
119894(119873)119908
1
1198941198961199103
119896(119873 minus 1)
1199101
119894= 1198911
119894(nod1119894) = nod1
119894
119894 = 1 2
(12)
The11990911= 120596lowastminus 120596119903 = 119890 is the tracking error between the desired
speed 120596lowast and the rotor speed 120596119903 The 11990912= 119890(1 minus 119911
minus1) = Δ119890
is the tracking error change The 1199081119894119896is the recurrent weight
between output layer and input layer The 119873 denotes thenumber of iterations The 1199103
119896is the output value of the out-
put layer in the recurrent Laguerre-orthogonal-polynomialNN
Second Layer Hidden LayerThe single node 119895th in this layeris labeled with Σ The net input and the net output for node119895th of the hidden layer are expressed as
nod2119895(119873) =
2
sum
119894=1
1199092
119894(119873) + 120573119910
2
119895(119873 minus 1)
1199102
119895= 1198912
119895(nod2119895) = 119871119895 (nod
2
119895)
119895 = 0 1 119898 minus 1
(13)
Laguerre-orthogonal polynomials [20ndash24] are selected foractivation function of the hidden layer The Laguerre-orthogonal polynomials are denoted by 119871119899(119909) where 119899 isthe order of expansion and minus1 lt 119909 lt 1 is the argumentof the polynomial 119898 is the number of nodes and 120573 is theself-connecting feedback gain of the hidden layer which isselected between 0 and 1 The zero the first and the secondorder Laguerre-orthogonal polynomials are given by 1198710(119909) =1 1198711(119909) = 1 minus 119909 and 1198712(119909) = 119909
2minus 4119909 + 2 respectively
The higher order polynomials are given by 1198713(119909) = minus1199093+
91199092minus 18119909 + 6 and 1198714(119909) = (35119909
4minus 30119909
2+ 3)8 The higher
order Laguerre-orthogonal polynomials may be generated bythe recursive formula given by 119871119899+1(119909) = [(2119899+1minus119909)119871119899(119909)minus119899119871119899minus1(119909)](119899 + 1)
Third Layer Output Layer The single node 119896th in this layeris labeled with Σ It computes the overall output as the
8 Mathematical Problems in Engineering
summation of all input signals The net input and the netoutput for node 119896th in this layer are expressed as
nod3119896=
119898minus1
sum
119895=0
1199082
1198961198951199093
119895(119873) 119910
3
119896= 1198913
119896(nod3119896) = nod3
119896 119896 = 1
(14)
where 1199082119896119895is the connective weight between the hidden layer
and the output layer 1198913119896is the activation function which
is selected as a linear function 1199093119895(119873) = 119910
2
119895(119873) represents
the 119895th input to the node of output layer The output valueof the recurrent Laguerre-orthogonal-polynomial NN can berepresented as 1199103
119896(119873) = 119906rl Then the output value of the
recurrent Laguerre-orthogonal-polynomial NN 119906rl can bedenoted as
119906rl = Θ119879Ψ (15)
in which Θ = [1199082
10sdot sdot sdot 119908
2
1119898minus1]119879
is the adjustable weightparameters vector between the hidden layer and the outputlayer of the recurrent Laguerre-orthogonal-polynomial NNΨ = [119909
3
0sdot sdot sdot 1199093
119898minus1]119879 is the inputs vector in the output layer
of the recurrent Laguerre-orthogonal-polynomial NN inwhich 1199093
119895is determined by the selected Laguerre-orthogonal-
polynomialsThirdly in order to evolve the recouped control 119906ro a
minimum approximation error 120575 is defined as
120575 = 119906lowast
119890minus 119906lowast
rl = 119906lowast
119890minus (Θlowast)119879Ψ (16)
in which Θlowast is an ideal weight vector to reach minimumapproximation error It is assumed that absolute value of 120575is less than a small positive value 120582 that is |120575| lt 120582 Then theerror dynamic equation from (10) can be rewritten as
119890 = minus1198961119890 + [(119906lowast
119890minus 119906rl) minus 119906rl minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl + 119906lowast
rl minus 119906rl) minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl) + (Θlowast)119879Ψ minus (Θ)
119879Ψ minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [120575 + (ΘlowastminusΘ)119879Ψ minus 119906ro minus 119906119889] 119861119886
(17)
Then the Lyapunov function is selected as
1198711 (119905) =1198902
2+(ΘlowastminusΘ)119879(ΘlowastminusΘ)
(21205831)+2
2120578 (18)
in which 1205831 is a learning rate 120578 is an adaptation gain and = minus 120582 is the bound estimated error Differentiating the
Lyapunov function with respect to 119905 and using (16) then (17)can be rewritten as
1 (119905) = 119890119890 minus(ΘlowastminusΘ)119879Θ
1205831+120582
120578
= minus1198961119890 + [120575 minus 119906ro minus 119906119889] 119861119886119890
+ (ΘlowastminusΘ)119879Ψ119861119886119890 minus
(ΘlowastminusΘ)119879Θ
1205831+120582
120578
(19)
In order to obtain 1 le 0 the adaptive law Θ and therecouped controller119906ro with estimation law can be designedas follows
Θ = 1205831Ψ119861119886119890 (20)
119906ro = sgn (119861119886119890) (21)
120582 = 120578
10038161003816100381610038161198611198861198901003816100381610038161003816
(22)
Substituting (11) (20) and (21) into (19) and using (11) with119868119889 = 0 then (19) can be represented as
1198761 (119905) = minus11989611198902+ (120575 minus sgn (119861119886119890)) 119861119886119890 +
120582
120578 (23)
Substituting (22) into (23) then (23) can be obtained as
1 (119905) le minus11989611198902+ |120575| minus 120582
10038161003816100381610038161198611198861198901003816100381610038161003816 le minus1198961119890
2le 0 (24)
From (24) the 1(119905) is a negative semidefinite that is1198761(119905) le1198761(0) It implies that 119890 and (ΘlowastminusΘ) are bounded In additionthe function is defined as
120576 (119905) = minus1 (119905) = 11989611198902 (25)
Integrating (25) with respect to 119905 then
int
119905
0
120576 (120591) 119889120591 = int
119905
0
[minus1 (119905)] 119889119905 = 1198761 (0) minus 1198761 (119905) (26)
Due to the fact that1198761(0) is bounded and1198761(119905) is nonincreas-ing and bounded then
lim119905rarrinfin
int
119905
0
120576 (120591) 119889120591 lt infin (27)
Differentiating (25) with respect to 119905 gives
120576 (119905) = 21198961119890 119890 (28)
Due to the fact that all the variables in the right side of (17)are bounded It implies that 119890 is also bounded Then 120576(119905)is a uniformly continuous function [51 52] It is denotedthat lim119905rarrinfin120576(119905) = 0 by using Barbalatrsquos lemma [51 52]Therefore 119890(119905) rarr 0 as 119905 rarr infin Furthermore In order˜toavoid chattering phenomenon of recouped controller 119906ro
Mathematical Problems in Engineering 9
the sign function sgn(119861119886119890) can be replaced by the equation119861119886119890(|119861119886119890| + 120588) where
120588 = 1205880
10038161003816100381610038161198611198861198901003816100381610038161003816 lt 120591
01003816100381610038161003816119861119886119890
1003816100381610038161003816 ge 120591(29)
in which 1205880 and 120591 are positive constantsAccording to Lyapunov stability theoremand the gradient
descent method an online parameter training methodologyof the recurrent Laguerre-orthogonal-polynomial NN canbe derived and trained effectively Then the parameter ofadaptive law Θ can be computed by the gradient descentmethod The adaptive law Θ shown in (20) calls for a properchoice of the learning rate For a small value of learning ratethe convergence of controller parameter can be guaranteedbut the convergent speed is very slow In order to achieve thefast convergence of output tracking error the modified PSOis used to obtain optimal learning rate for training parametersof the recurrent Laguerre-orthogonal-polynomial NN Firstthe parameter of adaptive law Θ shown in (20) can berewritten as
2
119896119895= 1205831119909
3
119895119861119886119890 (30)
The central part of the training algorithm for the recurrentLaguerre-orthogonal-polynomial NN is concerned with howto obtain recursively a gradient vector in which each elementin the training algorithm is defined as the derivative of anenergy function with respect to a parameter of the networkThis is done by means of the chain rule because the gradientvector is calculated in the direction opposite to the flow of theoutput of each node In order to describe the online trainingalgorithm of the recurrent Laguerre-orthogonal-polynomialNN a cost function is defined as
1198811 =1198902
2 (31)
According to the gradient descent method the adaptive lawof the weight also can be represented as
2
119896119895= minus1205831
1205971198811
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1205971199103
119896
120597 nod3119896
120597 nod3119896
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1199093
119895
(32)
Comparing (30) with (32) yields 12059711988111205971199103
119896= minus119890119861119886 Then the
convergence analysis in the following theorem is to derivespecific learning rate to assure convergence of the outputtracking error
The adaptation law of recurrent weight 1199081119894119896
using thegradient descent method can be updated as
1
119894119896= minus1205832
1205971198811
120597119906re
120597119906re1205971199103119896
1205971199103
119896
1205971199102119895
1205971199102
119895
120597 nod2119895
120597 nod2119895
1205971199101119894
1205971199101
119894
120597 nod1119894
120597 nod1119894
1205971199081119894119896
= 12058321198611198861198901199082
119896119895119871119895 (sdot) 119909
1
119894(119873) 119910
3
119896(119873 minus 1)
(33)
in which 1205832 is a learning rate Then the convergence analysisin the following theorem is to derive specific learning rate
to assure convergence of the output tracking error In orderto obtain better learning rate therefore the modified PSO isproposed to search for a better learning rate of the weights ofthe recurrent Laguerre-orthogonal-polynomial NN
The PSO [30ndash42] which has three parameters as twoacceleration coefficients 1198881 1198882 and inertia weight 120574(119899) has asignificant impact on performance of the algorithm espe-cially the impact of inertia weight The impact is differenton different conditions and is also different at different timesunder the same conditionThe PSOwith larger inertia weighthas a faster convergence speed and works well in globalsearch while the PSO with smaller inertia weight can reacha more accurate optimum value but only works well in localsearch Now dynamic inertia weight modification is used totrain the appropriate value of 120574(119899) in order to coordinatebetween search accuracy and search speedThemodifiedPSOalgorithmdepends in its implementation in the following tworelations
V119895 (119899 + 1) = 120574 (119899) V119895 (119899)
+ 120572 (119899) [11988811205931 (119875119887119895 minus 120583119898119895 (119899))
+ 11988821205932 (119875119892119895 minus 120583119898119895 (119899))] 119898 = 1 2
120583119898119895 (119899 + 1) = 120583119898119895 (119899) + V119895 (119899 + 1) 119898 = 1 2
120574 (119899) = 1205740 + 1205933 (1 minus 1205740)
120572 (119899) = 1205720 +1205721119899
119879
(34)where 119899 = 1 2 119873max indicates the iterations 120583119898119895(119899) isthe current position of particle 119875119895 in hyperspace and withrespect to learning rate 120583119898(119899) 119898 = 1 2 V119895(119899) is the currentspeed of particle 119895 120574(119899) is the inertia weight with respectiveto 119899 1198881 and 1198882 are acceleration positive constants 1205931 1205932 and1205933 are random numbers obtained from a uniform randomdistribution function in the interval [0 1] 1205740 is the initialpositive constant in the interval [0 1] 1205720 and 1205721are theinitial positive constants in the interval [0 1] 119879 denotes thenumber of generations119875119887119895 and119875119892119895 represent the best previousposition of the 119895th particle and the position of the best particleamong all particles in the population respectively Usually120574(119899) is modified gradually in descending within the limit of08 lt 120574(119899) lt 14 [40] so that search space can be changedsteadily from the global to the local Decreasing inertiaweightparticle swarm optimization is a topical algorithm of whichinertia weight 120574(119899) decreases linearly from 09 to 04 [38 39]Some scholars propose the increasing inertia weight particleswarm optimization of which inertia weight 120574(119905) increaseslinearly from 04 to 09 [40 41] 120572(119899) is the constriction factorintroduced by Eberhart and Shi [38 39] to avoid the swarmfrom premature convergence and to ensure stability of thesystem
4 Experimental Results
The whole system of the DSP-based control system for thePMSM driven V-belt CVT system is shown in Figure 1 The
10 Mathematical Problems in Engineering
Start (0 rads)(0 rpm)05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
(a)
05 s
628 rads (60 rpm)
Start (0 rads)
ee
(b)
005 s
e
0 rads (0 rpm)
314 rads (30 rpm)
(c)
Figure 6 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation119879119897 = Δ119879119901+119879un (a) tracking response of command rotor speed120596lowast
119903
desired command rotor speed120596lowast andmeasured rotor speed120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890 amplification
control algorithmwas executed by a TMS320C32DSP controlsystem including four channels of DA eight channels ofprogrammable PWM and one encoder interface circuit TheIGBT power module voltage source inverter is executed bycurrent-controlled SPWM with a switching frequency of15 kHz The specification of PMSM is a three-phase 48V750W 165 A and 3600 rpm The parameters of the PMSMare given as follows as 119877119903 = 25Ω 119871119889119903 = 119871119902119903 = 653mH119869119903 = 6215 times 10
minus3Nms 119861119903 = 618 times 10minus3Nmsrad and
119896119903 = 086NmA by using open circuit test short test rotorblock test and loading test Owing to inherent uncertaintyin V-belt CVT system (eg the lumped nonlinear externaldisturbances and parameter variations) and output currentlimitation of battery capacity the PMSM can only operate at3768 rads (3600 rpm) to avoid burning IGBT modules forV-belt CVT system at high speed perturbation
To show the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem two cases are provided in the experimentation One isthe 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand the other is the 3768 rads (3600 rpm) case under thelumped nonlinear external disturbances with twice param-eter variations 119879119897 = 2Δ119879119901 + 119879un In order to achieve goodtransient and steady-state control performance all gains of thewell-known PI controller are 119896ps = 135 and 119896is = 119896ps119879is =18 through some heuristic knowledge [47ndash50] on the tuningof the PI controller at 1884 rads (1800 rpm) case under thelumped nonlinear external disturbances with parameter vari-ation119879119897 = Δ119879119901+119879un for the speed trackingThe experimentalresults of the well-known PI controller for the V-belt CVTsystem driven by PMSM at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice
parameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures6 7 and 8 where tracking responses of the command rotorspeed 120596lowast
119903 the desired command rotor speed 120596lowast and the
measured rotor speed 120596119903 are shown in Figures 6(a) and7(a) tracking responses of the speed error 119890 are shown inFigures 6(b) and 7(b) tracking responses of the speed error119890 amplification are shown in Figures 6(c) and 7(c) Sincethe low speed operation is the same as the nominal casedue to smaller disturbance the response of speed shown inFigure 6(a) has better tracking performance Moreover thedegenerate tracking responses of speed shown in Figure 7(a)is obvious due to bigger nonlinear disturbance (eg rollingresistance wind resistance and parameter variation) at highspeed operation From the experimental results sluggishtracking responses of speed and current are obtained forthe V-belt CVT system driven by PMSM using the well-known PI controller The linear controller has the weakrobustness under bigger nonlinear disturbance because of noappropriate gains tuning or no degenerate nonlinear effect Inaddition responses of the command electromagnetic torque119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 8(a) and 8(b) respectivelyThe dynamic response of command electromagnetic torque119879119890 results in great torque ripple due to V-belt CVT systemwith nonlinear disturbance such as V-belt shaking frictionand action frictions between primary pulley and secondpulley
The control gains of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are 120578 =01 120582 = 03 All control gains of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system arechosen to achieve the best transient control performance
Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
and IM On the other hand the PMSM controlled by field-oriented control which can be achieved fast by four-quadrantoperation is much less sensitive to the parameters variationof the motor [9ndash11] Therefore the PMSM has been widelyused inmany industrial applications such as robotics electricpower steering and other mechatronics [9ndash11]
Artificial neural networks (ANNs) have emerged asa powerful learning technique to perform complex taskssuch as highly nonlinear approximations and the control ofdynamical systems [12ndash16] Some of the prime advantages ofusingNNare their ability to learn based on optimization of anappropriate error function and their excellent performancefor approximation of nonlinear functionsThere are differentparadigms of NNs proposed by different researchers for thetasks of system identifications and controls [13ndash16] One ofthe major drawbacks of the NN is that it is computation-ally intensive and needs large number of iterations for itstraining In order to reduce the computational complexitya functional-link NN which has shown that it is capableof producing similar performance as that of NN but withmuch less computational cost was reported in [17ndash19] Thesefunctional-link NNs [17ndash19] with faster convergence andlesser computational complexity were executed in the identi-fication and controls of nonlinear dynamic system with satis-factory results Recently the Laguerre-functional-expansionscombined with NN which was applied in highly nonlinearapproximations and the control of dynamical systems havebeen proposed [20ndash24] Aadaleesan et al [20] proposed theLaguerre filter combined with the wavelet network in orderto approximate the memoryless nonlinearity Approximationthe linear and nonlinear parts of a Wiener structure bymeans of the Laguerre filter and the general feed-forwardNNwas reported in [21] The Laguerre-functional-expansionsfeed-forward NN which employed Laguerre-orthogonal-polynomials in the activation functions of the hidden neu-rons in order to identify models of the chaotic time serieswas proposed by Zou andXiao [22] Patra et al [23] proposeda computationally efficient Laguerre NN which is based onLaguerre-functional-expansions to autocompensate for theassociated nonlinearity and environmental dependence forintelligent sensors and provide linearized sensor readouteven when the motes are operated in harsh environmentsPatra et al [24] present an intelligent technique by means ofnovel computationally efficient Laguerre NN to compensatefor the inherent sensor nonlinearity and the environmentalinfluences Since the Laguerre NN is a single-layer NN itscomputational complexity is found to be much lower thana multilayer perception (MLP) However these Laguerre-functional-expansions feed-forward NNs without a feedbackloops can be used for static function approximation but theycannot adequately approximate dynamic behaviors found inPMSM servo-driven V-belt CVT system with nonlinear andtime-varying characteristics
The recurrent NN has received increasing attention dueto its structural advantage in the modelling of the nonlinearsystem and dynamic control of the system [25ndash29] Thesenetworks are capable of effective identification and controlof complex process dynamics but with the expense of largecomputational complexity Hence if each neuron in the
recurrent NN is considered as a state in the nonlineardynamic systems the self-connection feedback type is ableto approximate the dynamic systems efficiently [25ndash29]In order to improve the ability of identifying high ordersystems and reduce computational complexity the recur-rent Laguerre-orthogonal-polynomial NN which has moreadvantages than the Laguerre-orthogonal-polynomial NNincluding better performance higher accuracy and dynamicrobustness has been proposed to control the PMSM servo-driven V-belt CVT system with nonlinear and time-varyingcharacteristics in this paper
Particular swarm optimization (PSO) is a population-based self-adaptive search optimization technique first intro-duced by Kennedy and Eberhart [30] Similar to geneticalgorithms [31] an evolutionary algorithm approach thePSO is an evolutionary optimization tool of swarm intel-ligence field based on a swarm (population) where eachmember is seen as a particle and each particle is a potentialsolution to the problem under analysis The motivationfor the development of this method was based on thesimulation of simplified animal social behaviors such as fishschooling bird flocking and so forth However unlike inother evolutionary optimization methods in PSO there is nodirect recombination of genetic material between individualsduring the search The PSO algorithm works on the socialbehavior of particles in the swarm Therefore it finds theglobal best solution by simply adjusting the trajectory of eachindividual toward its own best location and toward the bestparticle of the entire swarm at each time step (generation)[30 32] Clerc and Kennedy [32] introduced the concept ofinertia weight to the original version of PSO in order tobalance the local and global search during the optimizationprocess Thus PSO has been widely applied in mathematicalmodeling dynamic programming and system control [33ndash36] due to simple structure simple parameter setting andfast convergence speed How to improve the convergencespeed and how to guarantee the convergence of PSO are themain problems of PSO improvement [37] and are graduallyturning into a hot topic in this field In order to weigh therelationship between local search and global search Clercand Kennedy [32] and Eberhart and Shi [38 39] proposedimproved particle swarm optimization with inertial weightto control the exploitation and explorationMeanwhile someresearchers [40ndash42] have proposed the topical improvedparticle swarm algorithm with inertia factor which is calledtopical particle swarm optimization However the PSOexisted in premature convergence problem and the modifiedPSO is proposed to prevent premature convergence and toacquire optimal learning rate with better convergence in thispaper
In this study the hybrid recurrent Laguerre-orthogonal-polynomial NN control system is developed to control theV-belt CVT system with many nonlinear dynamics [1ndash843ndash46] which is driven by PMSM The hybrid recurrentLaguerre-orthogonal-polynomial NN control system has fastlearning property and good generalization capability Thecontrol method which is not dependent upon the prede-termined characteristics of the motor can adapt to anychange in the motor characteristics The hybrid recurrent
Mathematical Problems in Engineering 3
Laguerre-orthogonal-polynomial NN control system whichis composed of the inspector control the recurrent Laguerre-orthogonal-polynomial NN control with adaptive law andthe recouped control is applied to the V-belt CVT systemdriven by PMSM The adaptive law of the online parameterin the recurrent Laguerre-orthogonal-polynomial NN canbe derived according to the Lyapunov stability theoremand the gradient descent method The recurrent Laguerre-orthogonal-polynomial NN has the online learning ability torespond to the systemrsquos nonlinear and time-varying behaviorsunder the occurrence of the lumped nonlinear externaldisturbances with parameters variation Furthermore twooptimal learning rates of the parameters by means of mod-ified PSO are proposed to achieve fast convergence Finallythe control performances of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are ver-ified by experimental results
The paper is structured as follows Section 2 providesthe configuration of the V-belt CVT system driven byPMSM Section 3 develops the proposed novel hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemfor controlling the V-belt CVT system driven by PMSMSection 4 presents the experimental results for comparisonsbetween the proposed controlmethod and PI controlmethodat three cases Section 5 provides the conclusions
2 Configuration of System
Since the electric scooter system has much unknown non-linear uncertainties and parameter variations such as loadtorque rolling resistance wind resistance and braking forcethe V-belt CVT and clutch in the scooter model can becategorized as functioning in one of two operating modesdepending on the speed of the V-belt CVT output axisdisengaged or completely coupled At the start of the PMSMdrive cycles the scooter is in an idle state The clutchis initially disengaged and subsequent transition betweenmodes is controlled by the clutch axis rotational speed Exceptfor the mechanical losses the PMSM power is transmittedthrough theV-belt CVT and clutch to thewheel in the electricscooter
21 Structure of the V-Belt CVT SystemDriven by PMSM Thedevelopment of the V-belt CVT began with rubber V-belts[5] Despite the fact that rubber V-belt CVTs are not wellsuited for automotive applications because of their limitedtorque capacity there are some interesting concepts on themarket The V-belt CVT consists of a segmented rubber V-belt and two shaftswith conical pulleysTheV-belt is clampedbetween two pairs of conical sheaves In the V-belt CVT thetransmission ratio is determined by simultaneous adjustmentof the running radii of the belt on the pulleys On each shaftthere is one fixed and one axially moveable sheave Axialmovement of the moveable sheave adjusts the gap betweenthe sheaves and thereby the belt running radius The inputshaft of the V-belt CVT is called the primary shaft whichmounted the PMSM and the output shaft is the secondaryshaft which mounted the wheel The structure of the V-belt
CVT is shown in Figure 1 The appearance of the primarypulley side and the secondary pulley side in the V-belt CVTis shown in Figure 1(a) and the cross-section view of thesecondary shaft in the V-belt CVT is shown in Figure 1(b)The wheel of electric scooter is connected to the outputshaft of the final reduction using a torsion spring whichmodels the combined stiffness of both the drive shafts Theelectric scooter inertia is connected to the wheel using lineardamper which models the tire force The rolling resistanceon the electric scooter is modeled as a load torque In orderto reduce system complexity the torque dynamic equationsin the primary drive shaft and the secondary drive shaftof the V-belt CVT shown in Figure 2 can be simplified as[1ndash8]
119869119901119903 + 119861119901120596119903 + 119879119901 = 119879119890
119879119904 = 119869119904119904 + 119861119904120596119904 + 119879119904
119897(119865119897 (119861119892) 120592119886 (V119903 119861119892) 120591119886 (V119903) 120596
2
119904)
(1)
in which 119879119904119897(119865119897(119861119892) 120592119886(V119903 119861119892) 120591119886(V119903) 120596
2
119904) [1ndash8] is the lumped
nonlinear external disturbances of the secondary drive sideon the wheel 119879119901 = 120590119904120596119904119879119904120596119903 is the drive torque of theprimary pulley shaft 119879119904 is the drive torque of the secondarypulley shaft 120590119904 is the conversion ratio with respect tosecondary pulley shaft transferred to primary pulley shaft ofV-belt arc length 120592119886(V119903 119861119892) is the rolling resistance 120591119886(V119903) isthe wind resistance 119865119897(119861119892) is a braking force V119903 is the totalwind velocity 119861119892 represents the total frictional coefficient ofground surface 119861119901 and 119861119904 represent the viscous frictionalcoefficients of the PMSM and the wheel respectively 119869119901 and119869119904 are the inertias of the PMSM and the wheel respectively120596119903 and 120596119904 are the speeds of the PMSM and the wheelrespectively Then using speed ratio and sliding ratio [1ndash8]the torque equation can be transformed from the secondarypulley side to the primary pulley sideTherefore the resultantdynamic equation of the PMSM driven V-belt CVT systemfrom (1) can be simplified as [1ndash8 41ndash45]
119869119903119903 + 119861119903120596119903 + 119879119897 (119879119886 Δ119879119901 119865119897 (119861119892) 120592119886 (V119903 119861119892) 120591119886 (V119903) 1205962
119903)
= 119879119890
(2)
in which 119879119897(119879119886 Δ119879119901 119865119897(119861119892) 120592119886(V119903 119861119892) 120591119886(V119903) 1205962
119903) = 119879119886 +
Δ119879119901 + 119879un [1ndash8] is the resultant lumped nonlinear externaldisturbances with parameter variations 119879119886 is the fixed loadtorque Δ119879119901 = Δ119869119903119903 + Δ119861119903120596119903 is the resultant parametervariation 120592119886(V119903 119861119892) is the resultant rolling resistance 120591119886(V119903) isthe resultant wind resistance 119865119897(119861119892) is the resultant brakingforce 119879un = 119865119897(119861119892) + 120592119886(V119903 119861119892) + 120591119886(V119903)120596
2
119903is the resultant
unknown nonlinear load torque 119861119903 is the resultant viscousfrictional coefficient 119869119903 is the resultant moment of inertia
22 Structure of the PMSM Driven System For convenientdesign the stator voltage equations of the PMSM driven
4 Mathematical Problems in Engineering
Primary
Secondary driven shaft(mounted wheel) Secondary pulley plate
V-beltSecondary
Primary
(mounted PMSM)
Primary
Primary pulley side
Secondary pulley side
pulley faces
pulley plate
pulley face
driving shaft
(a)
V-beltSecondary pulley faces
Cam
Axial cam force
Secondary driven shaft (mounted wheel)
Secondary pulley shaft
Slide bushings
Belt tension force
Springs
Secondary pulley plate
(b)
Figure 1 Structure of the V-belt CVT system (a) appearance of the primary pulley side and the secondary pulley side (b) cross-section viewof the secondary shaft
V-belt CVT system
V-belt
Primarypulley side
Secondarypulley side
Primarydriving
shaft
Secondarydrivenshaft
PMSM Je
Js Wheel
Te 120596r Bp
Bs Tsl 120596s
Figure 2 Schematic of the PMSM-wheel connection through theV-belt CVT system
V-belt CVT system in the synchronously rotating referenceframe can be described as follows [9ndash11 42ndash45]
V119902119903 = 119877119903119894119902119903 + 119871119902119903 119894119902119903 + 120596119891 (119871119889119903119894119889119903 + 120582119891119889)
V119889119903 = 119877119903119894119889119903 + 119871119889119903 119894119889119903 minus 120596119891119871119902119903119894119902119903(3)
in which V119902119903 and V119889119903 are the 119889-axis and 119902-axis stator voltages119894119902119903 and 119894119889119903 are the 119889-axis and 119902-axis stator currents 119871119902119903and 119871119889119903 are the 119889-axis and 119902-axis stator inductances 120582119891119889 isthe 119889-axis permanent magnet flux linkage 119877119903 is the statorresistance 120596119891 = 1198751199031205961199032 is the electrical angular speed
The electromagnetic torque119879119890 of the PMSMdrivenV-beltCVT system can be described as
119879119890 =3119875119903 [120582119891119889119894119902119903 + (119871119889119903 minus 119871119902119903) 119894119889119903119894119902119903]
4 (4)
in which 119875119903 is the number of poles Due to 119871119889119903 = 119871119902119903 fora surface-mounted PMSM the second term of (4) is zero
Moreover 120582119891119889 is a constant for surface-mounted PMSMTherotor flux is produced in the 119889-axis only while the currentvector is generated in the 119902-axis for the field-oriented controlWhen the 119889-axis rotor flux is a constant and torque angle is1205872 [9ndash11] the maximum torque per ampere can be reachedfor the field-oriented control The electromagnetic torque 119879119890is linearly proportional to the 119902-axis current 119894119902119903 which isdetermined by closed-loop control The control principle ofthe PMSM driven system is based on field orientation ThePMSMdrivenV-belt CVT systemwith the implementation offield-oriented control can be reduced as 119879119890 = 119896119903119894119902119903 in which119896119903 = 31198751199031205821198911198894 is the torque constant The block diagram ofthe V-belt CVT system driven by PMSM is shown in Figure 3
The whole system of the PMSM driven V-belt CVT sys-tem can be indicated as follows a field-oriented institutiona current PI control loop a sinusoidal PWM control circuitan interlock circuit and an isolated circuit an IGBT powermodule inverter and a speed control loop The PI currentloop controller is the current loop tracking controller Inorder to attain good dynamic response all gains for well-known PI current loop controller are listed as follows 119896pc =95 and 119896ic = 119896pc119879ic = 28 through some heuristicknowledge [47ndash50] on the tuning of the PI controller Thefield-oriented institution consists of the coordinate transfor-mation sin 120579119891 cos 120579119891 generation and lookup table genera-tion The TMS320C32 DSP control system manufactured bySpinel Technology Corporation is used to implement field-oriented control and speed control The V-belt CVT systemdriven by PMSM is manipulated under the lumped externaldisturbances with nonlinear uncertainties
3 Design of Hybrid RecurrentLaguerre-Orthogonal-Polynomial NNControl System
Due tononlinear uncertainties of the V-belt CVT systemdriven by PMSM such as nonlinear friction force of the trans-mission belt and clutch rolling resistance wind resistanceand braking force these will lead to degeneration of trackingresponses in command current and speed of the V-belt CVT
Mathematical Problems in Engineering 5
PMSM
C
IGBT powermoduleinverter
SinusoidalPWM circuit
Interlock andisolated circuits
Current sensorscircuit
and ADconverter
DC power
V-beltcontinuous
variabletransmission
system (CVT)
Wheel
Encoder
PMSM driven system
V-belt CVT system
PI currentloop
controller Hybrid recurrent Laguerre-
orthogonal-polynomial NN control system
Referencemodel
Field orientation and current loop control
Filter and
1 Calculation
2 Generation
with lookup
3 Coordinate translation(Clark and
Park)
Inverse coordinatetranslation (Park and Clark)
Limiter
TMS 320C32 DSP control system
Vdc = 48V
+
minus
+ minus
+ minus
ia ib ic
120579r
120579r
iqr
iqr
idr
idr = 0
1
kr
ue = Te
120596r
120596lowast
e
120596lowastr
d120579rdt
120579f = Pr120579r2
table
Σ
sin f120579cos f120579
Figure 3 Block diagram of the PMSM driven V-belt CVT system
system driven by PMSMThese nonlinear uncertainties causevariation of rotor inertia and friction for the V-belt CVTsystem driven by PMSM For convenient hybrid recurrentLaguerre-orthogonal-polynomial NN control system designthe dynamic equation of the V-belt CVT system driven byPMSM from (2) can be rewritten as
119903 = minus119861119903120596119903
119869119903minus119879119897 (119865119897 120592119886 120591119886 120596
2
119903)
119869119903+119896119903119894119902119903
119869119903
= 119860119886120596119903 + 119862119886119879119897 (119865119897 120592119886 120591119886 1205962
119903) + 119861119886119906119890
(5)
in which 119906119890 = 119879119890 is the control effort that is the commandtorque of the PMSM119860119886 = minus119861119903119869119903119861119886 = 1119869119903 and119862119886 = minus1119869119903are three known constantsWhen the uncertainties includingvariation of systemparameters and external force disturbanceoccur the parameters are assumed to be bounded that is
|119860119886120596119903| le 1198631(120596119903) |119862119886119879119897(119865119897 120592119886 120591119886 1205962
119903)| le 1198632 and 1198633 le 119861119886
where1198631(120596119903) is a known continuous function1198632 and1198633 aretwo known constantsThen the tracking error can be definedas
119890 = 120596lowastminus 120596119903 (6)
where 120596lowast represents the desired command rotor speed 119890is the tracking error between the desired rotor speed andactual rotor speed If all parameters of the V-belt CVT systemdriven by PMSM including the lumped nonlinear externaldisturbances and parameter variation are well known theideal control law can be designed as
119906lowast
119890=[lowast+ 1198961119890 minus 119860119886120596119903 minus 119862119886119879119897 (119865119897 120592119886 120591119886 120596
2
119903)]
119861119886 (7)
6 Mathematical Problems in Engineering
Recouped controller
Referencemodel
PMSM drive system and V-belt CVT driven system
Adaptivelaw
Field orientation and current loop
control
Inspectedcontroller
Lyapunovfunction
Operatorindex
Inspector control system
Filterand
Estimationlaw
Modified particleswarm optimization
Two optimal learning rates
Hybrid recurrent Laguerre-orthogonal-polynomial neural network control system
Recurrent Laguerre-orthogonal-polynomial
neural networkcontroller
+
120579r
120596r
120596lowast
e
e120596lowastr
d120579rdt
+
+
eΣ
+
minus
e
Σue = Te
Ba
Ba
12058311205832
Ψ
w2kj w1ik
1 minus zminus1Δe
urourl
ud
120578
Id
Q1
times
Figure 4 Block diagram of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system
in which 1198961 is a positive constant Substituting (6) into (4)the error dynamic equation can be obtained as follows
119890 + 1198961119890 = 0 (8)
The system state can track the desired trajectory graduallyif 119890(119905) rarr 0 as 119905 rarr infin in (8) However the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is proposed to control the CVT driven by PMSMunder uncertain perturbations The configuration of theproposed hybrid recurrent Laguerre-orthogonal-polynomialNN control system is described in Figure 4
The hybrid recurrent Laguerre-orthogonal-polynomialNN control system is composed of an inspector controlsystem a recurrent Laguerre-orthogonal-polynomial NNcontroller and a recouped controller The control law isdesigned as
119906119890 = 119906119889 + 119906rl + 119906ro (9)
where 119906119889 is the proposed inspected control that is able to sta-bilize around a predetermined bound area in the states of thecontrolled system 119906rl is the recurrent Laguerre-orthogonal-polynomial NN control which is as the major tracking con-troller It is used to imitate an ideal control lawThe recoupedcontrol 119906ro is designed to recoup the difference between the
ideal control law and the recurrent Laguerre-orthogonal-polynomial NN control Since the inspected control causedthe overdone and chattering effort the recurrent Laguerre-orthogonal-polynomial NN control and the recouped controlare proposed to reduce and smooth the control effort whenthe system states are inside the predetermined bound areaWhen the recurrent Laguerre-orthogonal-polynomial NNapproximation properties cannot be ensured the inspectedcontrol is able to act in this case
For the condition of divergence of states the design ofhybrid recurrent Laguerre-orthogonal-polynomial NN con-trol system is essential to stretch the divergent states back tothe predestinated bound areaThehybrid recurrent Laguerre-orthogonal-polynomial NN control system can uniformlyapproximate the ideal control law inside the bound areaThen stability of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system can be warranted An errordynamic equation from (5) to (9) can be acquired as
119890 = minus1198961119890 + [119906lowast
119890minus 119906119889 minus 119906rl minus 119906ro] 119861119886 (10)
Firstly the inspected control 119906119889 can be designed as
119906119889 =119868119889 sgn (119890119861119886) [1198631 (120596119903) + 1198632 +
1003816100381610038161003816lowast1003816100381610038161003816 +
100381610038161003816100381611989611198901003816100381610038161003816]
119861119886 (11)
Mathematical Problems in Engineering 7
Hiddenlayer
Outputlayer
Inputlayer i
j
k
y3k
zminus1 zminus1
zminus1zminus1zminus1
w1ik w1ik
w2kjw2kj
x1i
Σ Σ Σ
Σ
L0(middot) Lj(middot) Lnminus1(middot)
120573 120573 120573
e Δe
y2j = x3j
y1i = x2i
middot middot middot middot middot middot
Π Π
Figure 5 Structure of the three-layer recurrent Laguerre-orthogonal-polynomial NN
in which sgn(sdot) is a sign function When the recurrentLaguerre-orthogonal-polynomial NN approximation prop-erties cannot be ensured the inspected control law is ableto act in this case that is 119868119889 = 1 Due to the inadequatebound values for example1198631(120596119903)11986321198633 and sign functionthe inspected control can produce in overdone and chat-tering effort Therefore the recurrent Laguerre-orthogonal-polynomial NN control and the recouped control can bedevised to conquer the mentioned blemish The recurrentLaguerre-orthogonal-polynomial NN control raised to imi-tate the ideal control 119906lowast
119890 Then the recouped control posed
to recoup the difference between the ideal control 119906lowast119890and
the recurrent Laguerre-orthogonal-polynomial NN control119906rl
Secondly the architecture of the proposed three-layerrecurrent Laguerre-orthogonal-polynomial NN is depictedin Figure 5 It is composed of an input layer a hidden layerand an output layer The activation functions and signalactions of nodes in each layer of the recurrent Laguerre-orthogonal-polynomial NN can be described as follows
First Layer Input Layer Each node 119894 in this layer is indicatedby using Π which multiplies by each other between eachother for input signals Then outputs signals are the resultsof product The input and the output for each node 119894 in thislayer are expressed as
nod1119894= prod
119896
1199091
119894(119873)119908
1
1198941198961199103
119896(119873 minus 1)
1199101
119894= 1198911
119894(nod1119894) = nod1
119894
119894 = 1 2
(12)
The11990911= 120596lowastminus 120596119903 = 119890 is the tracking error between the desired
speed 120596lowast and the rotor speed 120596119903 The 11990912= 119890(1 minus 119911
minus1) = Δ119890
is the tracking error change The 1199081119894119896is the recurrent weight
between output layer and input layer The 119873 denotes thenumber of iterations The 1199103
119896is the output value of the out-
put layer in the recurrent Laguerre-orthogonal-polynomialNN
Second Layer Hidden LayerThe single node 119895th in this layeris labeled with Σ The net input and the net output for node119895th of the hidden layer are expressed as
nod2119895(119873) =
2
sum
119894=1
1199092
119894(119873) + 120573119910
2
119895(119873 minus 1)
1199102
119895= 1198912
119895(nod2119895) = 119871119895 (nod
2
119895)
119895 = 0 1 119898 minus 1
(13)
Laguerre-orthogonal polynomials [20ndash24] are selected foractivation function of the hidden layer The Laguerre-orthogonal polynomials are denoted by 119871119899(119909) where 119899 isthe order of expansion and minus1 lt 119909 lt 1 is the argumentof the polynomial 119898 is the number of nodes and 120573 is theself-connecting feedback gain of the hidden layer which isselected between 0 and 1 The zero the first and the secondorder Laguerre-orthogonal polynomials are given by 1198710(119909) =1 1198711(119909) = 1 minus 119909 and 1198712(119909) = 119909
2minus 4119909 + 2 respectively
The higher order polynomials are given by 1198713(119909) = minus1199093+
91199092minus 18119909 + 6 and 1198714(119909) = (35119909
4minus 30119909
2+ 3)8 The higher
order Laguerre-orthogonal polynomials may be generated bythe recursive formula given by 119871119899+1(119909) = [(2119899+1minus119909)119871119899(119909)minus119899119871119899minus1(119909)](119899 + 1)
Third Layer Output Layer The single node 119896th in this layeris labeled with Σ It computes the overall output as the
8 Mathematical Problems in Engineering
summation of all input signals The net input and the netoutput for node 119896th in this layer are expressed as
nod3119896=
119898minus1
sum
119895=0
1199082
1198961198951199093
119895(119873) 119910
3
119896= 1198913
119896(nod3119896) = nod3
119896 119896 = 1
(14)
where 1199082119896119895is the connective weight between the hidden layer
and the output layer 1198913119896is the activation function which
is selected as a linear function 1199093119895(119873) = 119910
2
119895(119873) represents
the 119895th input to the node of output layer The output valueof the recurrent Laguerre-orthogonal-polynomial NN can berepresented as 1199103
119896(119873) = 119906rl Then the output value of the
recurrent Laguerre-orthogonal-polynomial NN 119906rl can bedenoted as
119906rl = Θ119879Ψ (15)
in which Θ = [1199082
10sdot sdot sdot 119908
2
1119898minus1]119879
is the adjustable weightparameters vector between the hidden layer and the outputlayer of the recurrent Laguerre-orthogonal-polynomial NNΨ = [119909
3
0sdot sdot sdot 1199093
119898minus1]119879 is the inputs vector in the output layer
of the recurrent Laguerre-orthogonal-polynomial NN inwhich 1199093
119895is determined by the selected Laguerre-orthogonal-
polynomialsThirdly in order to evolve the recouped control 119906ro a
minimum approximation error 120575 is defined as
120575 = 119906lowast
119890minus 119906lowast
rl = 119906lowast
119890minus (Θlowast)119879Ψ (16)
in which Θlowast is an ideal weight vector to reach minimumapproximation error It is assumed that absolute value of 120575is less than a small positive value 120582 that is |120575| lt 120582 Then theerror dynamic equation from (10) can be rewritten as
119890 = minus1198961119890 + [(119906lowast
119890minus 119906rl) minus 119906rl minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl + 119906lowast
rl minus 119906rl) minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl) + (Θlowast)119879Ψ minus (Θ)
119879Ψ minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [120575 + (ΘlowastminusΘ)119879Ψ minus 119906ro minus 119906119889] 119861119886
(17)
Then the Lyapunov function is selected as
1198711 (119905) =1198902
2+(ΘlowastminusΘ)119879(ΘlowastminusΘ)
(21205831)+2
2120578 (18)
in which 1205831 is a learning rate 120578 is an adaptation gain and = minus 120582 is the bound estimated error Differentiating the
Lyapunov function with respect to 119905 and using (16) then (17)can be rewritten as
1 (119905) = 119890119890 minus(ΘlowastminusΘ)119879Θ
1205831+120582
120578
= minus1198961119890 + [120575 minus 119906ro minus 119906119889] 119861119886119890
+ (ΘlowastminusΘ)119879Ψ119861119886119890 minus
(ΘlowastminusΘ)119879Θ
1205831+120582
120578
(19)
In order to obtain 1 le 0 the adaptive law Θ and therecouped controller119906ro with estimation law can be designedas follows
Θ = 1205831Ψ119861119886119890 (20)
119906ro = sgn (119861119886119890) (21)
120582 = 120578
10038161003816100381610038161198611198861198901003816100381610038161003816
(22)
Substituting (11) (20) and (21) into (19) and using (11) with119868119889 = 0 then (19) can be represented as
1198761 (119905) = minus11989611198902+ (120575 minus sgn (119861119886119890)) 119861119886119890 +
120582
120578 (23)
Substituting (22) into (23) then (23) can be obtained as
1 (119905) le minus11989611198902+ |120575| minus 120582
10038161003816100381610038161198611198861198901003816100381610038161003816 le minus1198961119890
2le 0 (24)
From (24) the 1(119905) is a negative semidefinite that is1198761(119905) le1198761(0) It implies that 119890 and (ΘlowastminusΘ) are bounded In additionthe function is defined as
120576 (119905) = minus1 (119905) = 11989611198902 (25)
Integrating (25) with respect to 119905 then
int
119905
0
120576 (120591) 119889120591 = int
119905
0
[minus1 (119905)] 119889119905 = 1198761 (0) minus 1198761 (119905) (26)
Due to the fact that1198761(0) is bounded and1198761(119905) is nonincreas-ing and bounded then
lim119905rarrinfin
int
119905
0
120576 (120591) 119889120591 lt infin (27)
Differentiating (25) with respect to 119905 gives
120576 (119905) = 21198961119890 119890 (28)
Due to the fact that all the variables in the right side of (17)are bounded It implies that 119890 is also bounded Then 120576(119905)is a uniformly continuous function [51 52] It is denotedthat lim119905rarrinfin120576(119905) = 0 by using Barbalatrsquos lemma [51 52]Therefore 119890(119905) rarr 0 as 119905 rarr infin Furthermore In order˜toavoid chattering phenomenon of recouped controller 119906ro
Mathematical Problems in Engineering 9
the sign function sgn(119861119886119890) can be replaced by the equation119861119886119890(|119861119886119890| + 120588) where
120588 = 1205880
10038161003816100381610038161198611198861198901003816100381610038161003816 lt 120591
01003816100381610038161003816119861119886119890
1003816100381610038161003816 ge 120591(29)
in which 1205880 and 120591 are positive constantsAccording to Lyapunov stability theoremand the gradient
descent method an online parameter training methodologyof the recurrent Laguerre-orthogonal-polynomial NN canbe derived and trained effectively Then the parameter ofadaptive law Θ can be computed by the gradient descentmethod The adaptive law Θ shown in (20) calls for a properchoice of the learning rate For a small value of learning ratethe convergence of controller parameter can be guaranteedbut the convergent speed is very slow In order to achieve thefast convergence of output tracking error the modified PSOis used to obtain optimal learning rate for training parametersof the recurrent Laguerre-orthogonal-polynomial NN Firstthe parameter of adaptive law Θ shown in (20) can berewritten as
2
119896119895= 1205831119909
3
119895119861119886119890 (30)
The central part of the training algorithm for the recurrentLaguerre-orthogonal-polynomial NN is concerned with howto obtain recursively a gradient vector in which each elementin the training algorithm is defined as the derivative of anenergy function with respect to a parameter of the networkThis is done by means of the chain rule because the gradientvector is calculated in the direction opposite to the flow of theoutput of each node In order to describe the online trainingalgorithm of the recurrent Laguerre-orthogonal-polynomialNN a cost function is defined as
1198811 =1198902
2 (31)
According to the gradient descent method the adaptive lawof the weight also can be represented as
2
119896119895= minus1205831
1205971198811
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1205971199103
119896
120597 nod3119896
120597 nod3119896
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1199093
119895
(32)
Comparing (30) with (32) yields 12059711988111205971199103
119896= minus119890119861119886 Then the
convergence analysis in the following theorem is to derivespecific learning rate to assure convergence of the outputtracking error
The adaptation law of recurrent weight 1199081119894119896
using thegradient descent method can be updated as
1
119894119896= minus1205832
1205971198811
120597119906re
120597119906re1205971199103119896
1205971199103
119896
1205971199102119895
1205971199102
119895
120597 nod2119895
120597 nod2119895
1205971199101119894
1205971199101
119894
120597 nod1119894
120597 nod1119894
1205971199081119894119896
= 12058321198611198861198901199082
119896119895119871119895 (sdot) 119909
1
119894(119873) 119910
3
119896(119873 minus 1)
(33)
in which 1205832 is a learning rate Then the convergence analysisin the following theorem is to derive specific learning rate
to assure convergence of the output tracking error In orderto obtain better learning rate therefore the modified PSO isproposed to search for a better learning rate of the weights ofthe recurrent Laguerre-orthogonal-polynomial NN
The PSO [30ndash42] which has three parameters as twoacceleration coefficients 1198881 1198882 and inertia weight 120574(119899) has asignificant impact on performance of the algorithm espe-cially the impact of inertia weight The impact is differenton different conditions and is also different at different timesunder the same conditionThe PSOwith larger inertia weighthas a faster convergence speed and works well in globalsearch while the PSO with smaller inertia weight can reacha more accurate optimum value but only works well in localsearch Now dynamic inertia weight modification is used totrain the appropriate value of 120574(119899) in order to coordinatebetween search accuracy and search speedThemodifiedPSOalgorithmdepends in its implementation in the following tworelations
V119895 (119899 + 1) = 120574 (119899) V119895 (119899)
+ 120572 (119899) [11988811205931 (119875119887119895 minus 120583119898119895 (119899))
+ 11988821205932 (119875119892119895 minus 120583119898119895 (119899))] 119898 = 1 2
120583119898119895 (119899 + 1) = 120583119898119895 (119899) + V119895 (119899 + 1) 119898 = 1 2
120574 (119899) = 1205740 + 1205933 (1 minus 1205740)
120572 (119899) = 1205720 +1205721119899
119879
(34)where 119899 = 1 2 119873max indicates the iterations 120583119898119895(119899) isthe current position of particle 119875119895 in hyperspace and withrespect to learning rate 120583119898(119899) 119898 = 1 2 V119895(119899) is the currentspeed of particle 119895 120574(119899) is the inertia weight with respectiveto 119899 1198881 and 1198882 are acceleration positive constants 1205931 1205932 and1205933 are random numbers obtained from a uniform randomdistribution function in the interval [0 1] 1205740 is the initialpositive constant in the interval [0 1] 1205720 and 1205721are theinitial positive constants in the interval [0 1] 119879 denotes thenumber of generations119875119887119895 and119875119892119895 represent the best previousposition of the 119895th particle and the position of the best particleamong all particles in the population respectively Usually120574(119899) is modified gradually in descending within the limit of08 lt 120574(119899) lt 14 [40] so that search space can be changedsteadily from the global to the local Decreasing inertiaweightparticle swarm optimization is a topical algorithm of whichinertia weight 120574(119899) decreases linearly from 09 to 04 [38 39]Some scholars propose the increasing inertia weight particleswarm optimization of which inertia weight 120574(119905) increaseslinearly from 04 to 09 [40 41] 120572(119899) is the constriction factorintroduced by Eberhart and Shi [38 39] to avoid the swarmfrom premature convergence and to ensure stability of thesystem
4 Experimental Results
The whole system of the DSP-based control system for thePMSM driven V-belt CVT system is shown in Figure 1 The
10 Mathematical Problems in Engineering
Start (0 rads)(0 rpm)05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
(a)
05 s
628 rads (60 rpm)
Start (0 rads)
ee
(b)
005 s
e
0 rads (0 rpm)
314 rads (30 rpm)
(c)
Figure 6 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation119879119897 = Δ119879119901+119879un (a) tracking response of command rotor speed120596lowast
119903
desired command rotor speed120596lowast andmeasured rotor speed120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890 amplification
control algorithmwas executed by a TMS320C32DSP controlsystem including four channels of DA eight channels ofprogrammable PWM and one encoder interface circuit TheIGBT power module voltage source inverter is executed bycurrent-controlled SPWM with a switching frequency of15 kHz The specification of PMSM is a three-phase 48V750W 165 A and 3600 rpm The parameters of the PMSMare given as follows as 119877119903 = 25Ω 119871119889119903 = 119871119902119903 = 653mH119869119903 = 6215 times 10
minus3Nms 119861119903 = 618 times 10minus3Nmsrad and
119896119903 = 086NmA by using open circuit test short test rotorblock test and loading test Owing to inherent uncertaintyin V-belt CVT system (eg the lumped nonlinear externaldisturbances and parameter variations) and output currentlimitation of battery capacity the PMSM can only operate at3768 rads (3600 rpm) to avoid burning IGBT modules forV-belt CVT system at high speed perturbation
To show the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem two cases are provided in the experimentation One isthe 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand the other is the 3768 rads (3600 rpm) case under thelumped nonlinear external disturbances with twice param-eter variations 119879119897 = 2Δ119879119901 + 119879un In order to achieve goodtransient and steady-state control performance all gains of thewell-known PI controller are 119896ps = 135 and 119896is = 119896ps119879is =18 through some heuristic knowledge [47ndash50] on the tuningof the PI controller at 1884 rads (1800 rpm) case under thelumped nonlinear external disturbances with parameter vari-ation119879119897 = Δ119879119901+119879un for the speed trackingThe experimentalresults of the well-known PI controller for the V-belt CVTsystem driven by PMSM at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice
parameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures6 7 and 8 where tracking responses of the command rotorspeed 120596lowast
119903 the desired command rotor speed 120596lowast and the
measured rotor speed 120596119903 are shown in Figures 6(a) and7(a) tracking responses of the speed error 119890 are shown inFigures 6(b) and 7(b) tracking responses of the speed error119890 amplification are shown in Figures 6(c) and 7(c) Sincethe low speed operation is the same as the nominal casedue to smaller disturbance the response of speed shown inFigure 6(a) has better tracking performance Moreover thedegenerate tracking responses of speed shown in Figure 7(a)is obvious due to bigger nonlinear disturbance (eg rollingresistance wind resistance and parameter variation) at highspeed operation From the experimental results sluggishtracking responses of speed and current are obtained forthe V-belt CVT system driven by PMSM using the well-known PI controller The linear controller has the weakrobustness under bigger nonlinear disturbance because of noappropriate gains tuning or no degenerate nonlinear effect Inaddition responses of the command electromagnetic torque119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 8(a) and 8(b) respectivelyThe dynamic response of command electromagnetic torque119879119890 results in great torque ripple due to V-belt CVT systemwith nonlinear disturbance such as V-belt shaking frictionand action frictions between primary pulley and secondpulley
The control gains of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are 120578 =01 120582 = 03 All control gains of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system arechosen to achieve the best transient control performance
Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Laguerre-orthogonal-polynomial NN control system whichis composed of the inspector control the recurrent Laguerre-orthogonal-polynomial NN control with adaptive law andthe recouped control is applied to the V-belt CVT systemdriven by PMSM The adaptive law of the online parameterin the recurrent Laguerre-orthogonal-polynomial NN canbe derived according to the Lyapunov stability theoremand the gradient descent method The recurrent Laguerre-orthogonal-polynomial NN has the online learning ability torespond to the systemrsquos nonlinear and time-varying behaviorsunder the occurrence of the lumped nonlinear externaldisturbances with parameters variation Furthermore twooptimal learning rates of the parameters by means of mod-ified PSO are proposed to achieve fast convergence Finallythe control performances of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are ver-ified by experimental results
The paper is structured as follows Section 2 providesthe configuration of the V-belt CVT system driven byPMSM Section 3 develops the proposed novel hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemfor controlling the V-belt CVT system driven by PMSMSection 4 presents the experimental results for comparisonsbetween the proposed controlmethod and PI controlmethodat three cases Section 5 provides the conclusions
2 Configuration of System
Since the electric scooter system has much unknown non-linear uncertainties and parameter variations such as loadtorque rolling resistance wind resistance and braking forcethe V-belt CVT and clutch in the scooter model can becategorized as functioning in one of two operating modesdepending on the speed of the V-belt CVT output axisdisengaged or completely coupled At the start of the PMSMdrive cycles the scooter is in an idle state The clutchis initially disengaged and subsequent transition betweenmodes is controlled by the clutch axis rotational speed Exceptfor the mechanical losses the PMSM power is transmittedthrough theV-belt CVT and clutch to thewheel in the electricscooter
21 Structure of the V-Belt CVT SystemDriven by PMSM Thedevelopment of the V-belt CVT began with rubber V-belts[5] Despite the fact that rubber V-belt CVTs are not wellsuited for automotive applications because of their limitedtorque capacity there are some interesting concepts on themarket The V-belt CVT consists of a segmented rubber V-belt and two shaftswith conical pulleysTheV-belt is clampedbetween two pairs of conical sheaves In the V-belt CVT thetransmission ratio is determined by simultaneous adjustmentof the running radii of the belt on the pulleys On each shaftthere is one fixed and one axially moveable sheave Axialmovement of the moveable sheave adjusts the gap betweenthe sheaves and thereby the belt running radius The inputshaft of the V-belt CVT is called the primary shaft whichmounted the PMSM and the output shaft is the secondaryshaft which mounted the wheel The structure of the V-belt
CVT is shown in Figure 1 The appearance of the primarypulley side and the secondary pulley side in the V-belt CVTis shown in Figure 1(a) and the cross-section view of thesecondary shaft in the V-belt CVT is shown in Figure 1(b)The wheel of electric scooter is connected to the outputshaft of the final reduction using a torsion spring whichmodels the combined stiffness of both the drive shafts Theelectric scooter inertia is connected to the wheel using lineardamper which models the tire force The rolling resistanceon the electric scooter is modeled as a load torque In orderto reduce system complexity the torque dynamic equationsin the primary drive shaft and the secondary drive shaftof the V-belt CVT shown in Figure 2 can be simplified as[1ndash8]
119869119901119903 + 119861119901120596119903 + 119879119901 = 119879119890
119879119904 = 119869119904119904 + 119861119904120596119904 + 119879119904
119897(119865119897 (119861119892) 120592119886 (V119903 119861119892) 120591119886 (V119903) 120596
2
119904)
(1)
in which 119879119904119897(119865119897(119861119892) 120592119886(V119903 119861119892) 120591119886(V119903) 120596
2
119904) [1ndash8] is the lumped
nonlinear external disturbances of the secondary drive sideon the wheel 119879119901 = 120590119904120596119904119879119904120596119903 is the drive torque of theprimary pulley shaft 119879119904 is the drive torque of the secondarypulley shaft 120590119904 is the conversion ratio with respect tosecondary pulley shaft transferred to primary pulley shaft ofV-belt arc length 120592119886(V119903 119861119892) is the rolling resistance 120591119886(V119903) isthe wind resistance 119865119897(119861119892) is a braking force V119903 is the totalwind velocity 119861119892 represents the total frictional coefficient ofground surface 119861119901 and 119861119904 represent the viscous frictionalcoefficients of the PMSM and the wheel respectively 119869119901 and119869119904 are the inertias of the PMSM and the wheel respectively120596119903 and 120596119904 are the speeds of the PMSM and the wheelrespectively Then using speed ratio and sliding ratio [1ndash8]the torque equation can be transformed from the secondarypulley side to the primary pulley sideTherefore the resultantdynamic equation of the PMSM driven V-belt CVT systemfrom (1) can be simplified as [1ndash8 41ndash45]
119869119903119903 + 119861119903120596119903 + 119879119897 (119879119886 Δ119879119901 119865119897 (119861119892) 120592119886 (V119903 119861119892) 120591119886 (V119903) 1205962
119903)
= 119879119890
(2)
in which 119879119897(119879119886 Δ119879119901 119865119897(119861119892) 120592119886(V119903 119861119892) 120591119886(V119903) 1205962
119903) = 119879119886 +
Δ119879119901 + 119879un [1ndash8] is the resultant lumped nonlinear externaldisturbances with parameter variations 119879119886 is the fixed loadtorque Δ119879119901 = Δ119869119903119903 + Δ119861119903120596119903 is the resultant parametervariation 120592119886(V119903 119861119892) is the resultant rolling resistance 120591119886(V119903) isthe resultant wind resistance 119865119897(119861119892) is the resultant brakingforce 119879un = 119865119897(119861119892) + 120592119886(V119903 119861119892) + 120591119886(V119903)120596
2
119903is the resultant
unknown nonlinear load torque 119861119903 is the resultant viscousfrictional coefficient 119869119903 is the resultant moment of inertia
22 Structure of the PMSM Driven System For convenientdesign the stator voltage equations of the PMSM driven
4 Mathematical Problems in Engineering
Primary
Secondary driven shaft(mounted wheel) Secondary pulley plate
V-beltSecondary
Primary
(mounted PMSM)
Primary
Primary pulley side
Secondary pulley side
pulley faces
pulley plate
pulley face
driving shaft
(a)
V-beltSecondary pulley faces
Cam
Axial cam force
Secondary driven shaft (mounted wheel)
Secondary pulley shaft
Slide bushings
Belt tension force
Springs
Secondary pulley plate
(b)
Figure 1 Structure of the V-belt CVT system (a) appearance of the primary pulley side and the secondary pulley side (b) cross-section viewof the secondary shaft
V-belt CVT system
V-belt
Primarypulley side
Secondarypulley side
Primarydriving
shaft
Secondarydrivenshaft
PMSM Je
Js Wheel
Te 120596r Bp
Bs Tsl 120596s
Figure 2 Schematic of the PMSM-wheel connection through theV-belt CVT system
V-belt CVT system in the synchronously rotating referenceframe can be described as follows [9ndash11 42ndash45]
V119902119903 = 119877119903119894119902119903 + 119871119902119903 119894119902119903 + 120596119891 (119871119889119903119894119889119903 + 120582119891119889)
V119889119903 = 119877119903119894119889119903 + 119871119889119903 119894119889119903 minus 120596119891119871119902119903119894119902119903(3)
in which V119902119903 and V119889119903 are the 119889-axis and 119902-axis stator voltages119894119902119903 and 119894119889119903 are the 119889-axis and 119902-axis stator currents 119871119902119903and 119871119889119903 are the 119889-axis and 119902-axis stator inductances 120582119891119889 isthe 119889-axis permanent magnet flux linkage 119877119903 is the statorresistance 120596119891 = 1198751199031205961199032 is the electrical angular speed
The electromagnetic torque119879119890 of the PMSMdrivenV-beltCVT system can be described as
119879119890 =3119875119903 [120582119891119889119894119902119903 + (119871119889119903 minus 119871119902119903) 119894119889119903119894119902119903]
4 (4)
in which 119875119903 is the number of poles Due to 119871119889119903 = 119871119902119903 fora surface-mounted PMSM the second term of (4) is zero
Moreover 120582119891119889 is a constant for surface-mounted PMSMTherotor flux is produced in the 119889-axis only while the currentvector is generated in the 119902-axis for the field-oriented controlWhen the 119889-axis rotor flux is a constant and torque angle is1205872 [9ndash11] the maximum torque per ampere can be reachedfor the field-oriented control The electromagnetic torque 119879119890is linearly proportional to the 119902-axis current 119894119902119903 which isdetermined by closed-loop control The control principle ofthe PMSM driven system is based on field orientation ThePMSMdrivenV-belt CVT systemwith the implementation offield-oriented control can be reduced as 119879119890 = 119896119903119894119902119903 in which119896119903 = 31198751199031205821198911198894 is the torque constant The block diagram ofthe V-belt CVT system driven by PMSM is shown in Figure 3
The whole system of the PMSM driven V-belt CVT sys-tem can be indicated as follows a field-oriented institutiona current PI control loop a sinusoidal PWM control circuitan interlock circuit and an isolated circuit an IGBT powermodule inverter and a speed control loop The PI currentloop controller is the current loop tracking controller Inorder to attain good dynamic response all gains for well-known PI current loop controller are listed as follows 119896pc =95 and 119896ic = 119896pc119879ic = 28 through some heuristicknowledge [47ndash50] on the tuning of the PI controller Thefield-oriented institution consists of the coordinate transfor-mation sin 120579119891 cos 120579119891 generation and lookup table genera-tion The TMS320C32 DSP control system manufactured bySpinel Technology Corporation is used to implement field-oriented control and speed control The V-belt CVT systemdriven by PMSM is manipulated under the lumped externaldisturbances with nonlinear uncertainties
3 Design of Hybrid RecurrentLaguerre-Orthogonal-Polynomial NNControl System
Due tononlinear uncertainties of the V-belt CVT systemdriven by PMSM such as nonlinear friction force of the trans-mission belt and clutch rolling resistance wind resistanceand braking force these will lead to degeneration of trackingresponses in command current and speed of the V-belt CVT
Mathematical Problems in Engineering 5
PMSM
C
IGBT powermoduleinverter
SinusoidalPWM circuit
Interlock andisolated circuits
Current sensorscircuit
and ADconverter
DC power
V-beltcontinuous
variabletransmission
system (CVT)
Wheel
Encoder
PMSM driven system
V-belt CVT system
PI currentloop
controller Hybrid recurrent Laguerre-
orthogonal-polynomial NN control system
Referencemodel
Field orientation and current loop control
Filter and
1 Calculation
2 Generation
with lookup
3 Coordinate translation(Clark and
Park)
Inverse coordinatetranslation (Park and Clark)
Limiter
TMS 320C32 DSP control system
Vdc = 48V
+
minus
+ minus
+ minus
ia ib ic
120579r
120579r
iqr
iqr
idr
idr = 0
1
kr
ue = Te
120596r
120596lowast
e
120596lowastr
d120579rdt
120579f = Pr120579r2
table
Σ
sin f120579cos f120579
Figure 3 Block diagram of the PMSM driven V-belt CVT system
system driven by PMSMThese nonlinear uncertainties causevariation of rotor inertia and friction for the V-belt CVTsystem driven by PMSM For convenient hybrid recurrentLaguerre-orthogonal-polynomial NN control system designthe dynamic equation of the V-belt CVT system driven byPMSM from (2) can be rewritten as
119903 = minus119861119903120596119903
119869119903minus119879119897 (119865119897 120592119886 120591119886 120596
2
119903)
119869119903+119896119903119894119902119903
119869119903
= 119860119886120596119903 + 119862119886119879119897 (119865119897 120592119886 120591119886 1205962
119903) + 119861119886119906119890
(5)
in which 119906119890 = 119879119890 is the control effort that is the commandtorque of the PMSM119860119886 = minus119861119903119869119903119861119886 = 1119869119903 and119862119886 = minus1119869119903are three known constantsWhen the uncertainties includingvariation of systemparameters and external force disturbanceoccur the parameters are assumed to be bounded that is
|119860119886120596119903| le 1198631(120596119903) |119862119886119879119897(119865119897 120592119886 120591119886 1205962
119903)| le 1198632 and 1198633 le 119861119886
where1198631(120596119903) is a known continuous function1198632 and1198633 aretwo known constantsThen the tracking error can be definedas
119890 = 120596lowastminus 120596119903 (6)
where 120596lowast represents the desired command rotor speed 119890is the tracking error between the desired rotor speed andactual rotor speed If all parameters of the V-belt CVT systemdriven by PMSM including the lumped nonlinear externaldisturbances and parameter variation are well known theideal control law can be designed as
119906lowast
119890=[lowast+ 1198961119890 minus 119860119886120596119903 minus 119862119886119879119897 (119865119897 120592119886 120591119886 120596
2
119903)]
119861119886 (7)
6 Mathematical Problems in Engineering
Recouped controller
Referencemodel
PMSM drive system and V-belt CVT driven system
Adaptivelaw
Field orientation and current loop
control
Inspectedcontroller
Lyapunovfunction
Operatorindex
Inspector control system
Filterand
Estimationlaw
Modified particleswarm optimization
Two optimal learning rates
Hybrid recurrent Laguerre-orthogonal-polynomial neural network control system
Recurrent Laguerre-orthogonal-polynomial
neural networkcontroller
+
120579r
120596r
120596lowast
e
e120596lowastr
d120579rdt
+
+
eΣ
+
minus
e
Σue = Te
Ba
Ba
12058311205832
Ψ
w2kj w1ik
1 minus zminus1Δe
urourl
ud
120578
Id
Q1
times
Figure 4 Block diagram of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system
in which 1198961 is a positive constant Substituting (6) into (4)the error dynamic equation can be obtained as follows
119890 + 1198961119890 = 0 (8)
The system state can track the desired trajectory graduallyif 119890(119905) rarr 0 as 119905 rarr infin in (8) However the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is proposed to control the CVT driven by PMSMunder uncertain perturbations The configuration of theproposed hybrid recurrent Laguerre-orthogonal-polynomialNN control system is described in Figure 4
The hybrid recurrent Laguerre-orthogonal-polynomialNN control system is composed of an inspector controlsystem a recurrent Laguerre-orthogonal-polynomial NNcontroller and a recouped controller The control law isdesigned as
119906119890 = 119906119889 + 119906rl + 119906ro (9)
where 119906119889 is the proposed inspected control that is able to sta-bilize around a predetermined bound area in the states of thecontrolled system 119906rl is the recurrent Laguerre-orthogonal-polynomial NN control which is as the major tracking con-troller It is used to imitate an ideal control lawThe recoupedcontrol 119906ro is designed to recoup the difference between the
ideal control law and the recurrent Laguerre-orthogonal-polynomial NN control Since the inspected control causedthe overdone and chattering effort the recurrent Laguerre-orthogonal-polynomial NN control and the recouped controlare proposed to reduce and smooth the control effort whenthe system states are inside the predetermined bound areaWhen the recurrent Laguerre-orthogonal-polynomial NNapproximation properties cannot be ensured the inspectedcontrol is able to act in this case
For the condition of divergence of states the design ofhybrid recurrent Laguerre-orthogonal-polynomial NN con-trol system is essential to stretch the divergent states back tothe predestinated bound areaThehybrid recurrent Laguerre-orthogonal-polynomial NN control system can uniformlyapproximate the ideal control law inside the bound areaThen stability of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system can be warranted An errordynamic equation from (5) to (9) can be acquired as
119890 = minus1198961119890 + [119906lowast
119890minus 119906119889 minus 119906rl minus 119906ro] 119861119886 (10)
Firstly the inspected control 119906119889 can be designed as
119906119889 =119868119889 sgn (119890119861119886) [1198631 (120596119903) + 1198632 +
1003816100381610038161003816lowast1003816100381610038161003816 +
100381610038161003816100381611989611198901003816100381610038161003816]
119861119886 (11)
Mathematical Problems in Engineering 7
Hiddenlayer
Outputlayer
Inputlayer i
j
k
y3k
zminus1 zminus1
zminus1zminus1zminus1
w1ik w1ik
w2kjw2kj
x1i
Σ Σ Σ
Σ
L0(middot) Lj(middot) Lnminus1(middot)
120573 120573 120573
e Δe
y2j = x3j
y1i = x2i
middot middot middot middot middot middot
Π Π
Figure 5 Structure of the three-layer recurrent Laguerre-orthogonal-polynomial NN
in which sgn(sdot) is a sign function When the recurrentLaguerre-orthogonal-polynomial NN approximation prop-erties cannot be ensured the inspected control law is ableto act in this case that is 119868119889 = 1 Due to the inadequatebound values for example1198631(120596119903)11986321198633 and sign functionthe inspected control can produce in overdone and chat-tering effort Therefore the recurrent Laguerre-orthogonal-polynomial NN control and the recouped control can bedevised to conquer the mentioned blemish The recurrentLaguerre-orthogonal-polynomial NN control raised to imi-tate the ideal control 119906lowast
119890 Then the recouped control posed
to recoup the difference between the ideal control 119906lowast119890and
the recurrent Laguerre-orthogonal-polynomial NN control119906rl
Secondly the architecture of the proposed three-layerrecurrent Laguerre-orthogonal-polynomial NN is depictedin Figure 5 It is composed of an input layer a hidden layerand an output layer The activation functions and signalactions of nodes in each layer of the recurrent Laguerre-orthogonal-polynomial NN can be described as follows
First Layer Input Layer Each node 119894 in this layer is indicatedby using Π which multiplies by each other between eachother for input signals Then outputs signals are the resultsof product The input and the output for each node 119894 in thislayer are expressed as
nod1119894= prod
119896
1199091
119894(119873)119908
1
1198941198961199103
119896(119873 minus 1)
1199101
119894= 1198911
119894(nod1119894) = nod1
119894
119894 = 1 2
(12)
The11990911= 120596lowastminus 120596119903 = 119890 is the tracking error between the desired
speed 120596lowast and the rotor speed 120596119903 The 11990912= 119890(1 minus 119911
minus1) = Δ119890
is the tracking error change The 1199081119894119896is the recurrent weight
between output layer and input layer The 119873 denotes thenumber of iterations The 1199103
119896is the output value of the out-
put layer in the recurrent Laguerre-orthogonal-polynomialNN
Second Layer Hidden LayerThe single node 119895th in this layeris labeled with Σ The net input and the net output for node119895th of the hidden layer are expressed as
nod2119895(119873) =
2
sum
119894=1
1199092
119894(119873) + 120573119910
2
119895(119873 minus 1)
1199102
119895= 1198912
119895(nod2119895) = 119871119895 (nod
2
119895)
119895 = 0 1 119898 minus 1
(13)
Laguerre-orthogonal polynomials [20ndash24] are selected foractivation function of the hidden layer The Laguerre-orthogonal polynomials are denoted by 119871119899(119909) where 119899 isthe order of expansion and minus1 lt 119909 lt 1 is the argumentof the polynomial 119898 is the number of nodes and 120573 is theself-connecting feedback gain of the hidden layer which isselected between 0 and 1 The zero the first and the secondorder Laguerre-orthogonal polynomials are given by 1198710(119909) =1 1198711(119909) = 1 minus 119909 and 1198712(119909) = 119909
2minus 4119909 + 2 respectively
The higher order polynomials are given by 1198713(119909) = minus1199093+
91199092minus 18119909 + 6 and 1198714(119909) = (35119909
4minus 30119909
2+ 3)8 The higher
order Laguerre-orthogonal polynomials may be generated bythe recursive formula given by 119871119899+1(119909) = [(2119899+1minus119909)119871119899(119909)minus119899119871119899minus1(119909)](119899 + 1)
Third Layer Output Layer The single node 119896th in this layeris labeled with Σ It computes the overall output as the
8 Mathematical Problems in Engineering
summation of all input signals The net input and the netoutput for node 119896th in this layer are expressed as
nod3119896=
119898minus1
sum
119895=0
1199082
1198961198951199093
119895(119873) 119910
3
119896= 1198913
119896(nod3119896) = nod3
119896 119896 = 1
(14)
where 1199082119896119895is the connective weight between the hidden layer
and the output layer 1198913119896is the activation function which
is selected as a linear function 1199093119895(119873) = 119910
2
119895(119873) represents
the 119895th input to the node of output layer The output valueof the recurrent Laguerre-orthogonal-polynomial NN can berepresented as 1199103
119896(119873) = 119906rl Then the output value of the
recurrent Laguerre-orthogonal-polynomial NN 119906rl can bedenoted as
119906rl = Θ119879Ψ (15)
in which Θ = [1199082
10sdot sdot sdot 119908
2
1119898minus1]119879
is the adjustable weightparameters vector between the hidden layer and the outputlayer of the recurrent Laguerre-orthogonal-polynomial NNΨ = [119909
3
0sdot sdot sdot 1199093
119898minus1]119879 is the inputs vector in the output layer
of the recurrent Laguerre-orthogonal-polynomial NN inwhich 1199093
119895is determined by the selected Laguerre-orthogonal-
polynomialsThirdly in order to evolve the recouped control 119906ro a
minimum approximation error 120575 is defined as
120575 = 119906lowast
119890minus 119906lowast
rl = 119906lowast
119890minus (Θlowast)119879Ψ (16)
in which Θlowast is an ideal weight vector to reach minimumapproximation error It is assumed that absolute value of 120575is less than a small positive value 120582 that is |120575| lt 120582 Then theerror dynamic equation from (10) can be rewritten as
119890 = minus1198961119890 + [(119906lowast
119890minus 119906rl) minus 119906rl minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl + 119906lowast
rl minus 119906rl) minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl) + (Θlowast)119879Ψ minus (Θ)
119879Ψ minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [120575 + (ΘlowastminusΘ)119879Ψ minus 119906ro minus 119906119889] 119861119886
(17)
Then the Lyapunov function is selected as
1198711 (119905) =1198902
2+(ΘlowastminusΘ)119879(ΘlowastminusΘ)
(21205831)+2
2120578 (18)
in which 1205831 is a learning rate 120578 is an adaptation gain and = minus 120582 is the bound estimated error Differentiating the
Lyapunov function with respect to 119905 and using (16) then (17)can be rewritten as
1 (119905) = 119890119890 minus(ΘlowastminusΘ)119879Θ
1205831+120582
120578
= minus1198961119890 + [120575 minus 119906ro minus 119906119889] 119861119886119890
+ (ΘlowastminusΘ)119879Ψ119861119886119890 minus
(ΘlowastminusΘ)119879Θ
1205831+120582
120578
(19)
In order to obtain 1 le 0 the adaptive law Θ and therecouped controller119906ro with estimation law can be designedas follows
Θ = 1205831Ψ119861119886119890 (20)
119906ro = sgn (119861119886119890) (21)
120582 = 120578
10038161003816100381610038161198611198861198901003816100381610038161003816
(22)
Substituting (11) (20) and (21) into (19) and using (11) with119868119889 = 0 then (19) can be represented as
1198761 (119905) = minus11989611198902+ (120575 minus sgn (119861119886119890)) 119861119886119890 +
120582
120578 (23)
Substituting (22) into (23) then (23) can be obtained as
1 (119905) le minus11989611198902+ |120575| minus 120582
10038161003816100381610038161198611198861198901003816100381610038161003816 le minus1198961119890
2le 0 (24)
From (24) the 1(119905) is a negative semidefinite that is1198761(119905) le1198761(0) It implies that 119890 and (ΘlowastminusΘ) are bounded In additionthe function is defined as
120576 (119905) = minus1 (119905) = 11989611198902 (25)
Integrating (25) with respect to 119905 then
int
119905
0
120576 (120591) 119889120591 = int
119905
0
[minus1 (119905)] 119889119905 = 1198761 (0) minus 1198761 (119905) (26)
Due to the fact that1198761(0) is bounded and1198761(119905) is nonincreas-ing and bounded then
lim119905rarrinfin
int
119905
0
120576 (120591) 119889120591 lt infin (27)
Differentiating (25) with respect to 119905 gives
120576 (119905) = 21198961119890 119890 (28)
Due to the fact that all the variables in the right side of (17)are bounded It implies that 119890 is also bounded Then 120576(119905)is a uniformly continuous function [51 52] It is denotedthat lim119905rarrinfin120576(119905) = 0 by using Barbalatrsquos lemma [51 52]Therefore 119890(119905) rarr 0 as 119905 rarr infin Furthermore In order˜toavoid chattering phenomenon of recouped controller 119906ro
Mathematical Problems in Engineering 9
the sign function sgn(119861119886119890) can be replaced by the equation119861119886119890(|119861119886119890| + 120588) where
120588 = 1205880
10038161003816100381610038161198611198861198901003816100381610038161003816 lt 120591
01003816100381610038161003816119861119886119890
1003816100381610038161003816 ge 120591(29)
in which 1205880 and 120591 are positive constantsAccording to Lyapunov stability theoremand the gradient
descent method an online parameter training methodologyof the recurrent Laguerre-orthogonal-polynomial NN canbe derived and trained effectively Then the parameter ofadaptive law Θ can be computed by the gradient descentmethod The adaptive law Θ shown in (20) calls for a properchoice of the learning rate For a small value of learning ratethe convergence of controller parameter can be guaranteedbut the convergent speed is very slow In order to achieve thefast convergence of output tracking error the modified PSOis used to obtain optimal learning rate for training parametersof the recurrent Laguerre-orthogonal-polynomial NN Firstthe parameter of adaptive law Θ shown in (20) can berewritten as
2
119896119895= 1205831119909
3
119895119861119886119890 (30)
The central part of the training algorithm for the recurrentLaguerre-orthogonal-polynomial NN is concerned with howto obtain recursively a gradient vector in which each elementin the training algorithm is defined as the derivative of anenergy function with respect to a parameter of the networkThis is done by means of the chain rule because the gradientvector is calculated in the direction opposite to the flow of theoutput of each node In order to describe the online trainingalgorithm of the recurrent Laguerre-orthogonal-polynomialNN a cost function is defined as
1198811 =1198902
2 (31)
According to the gradient descent method the adaptive lawof the weight also can be represented as
2
119896119895= minus1205831
1205971198811
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1205971199103
119896
120597 nod3119896
120597 nod3119896
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1199093
119895
(32)
Comparing (30) with (32) yields 12059711988111205971199103
119896= minus119890119861119886 Then the
convergence analysis in the following theorem is to derivespecific learning rate to assure convergence of the outputtracking error
The adaptation law of recurrent weight 1199081119894119896
using thegradient descent method can be updated as
1
119894119896= minus1205832
1205971198811
120597119906re
120597119906re1205971199103119896
1205971199103
119896
1205971199102119895
1205971199102
119895
120597 nod2119895
120597 nod2119895
1205971199101119894
1205971199101
119894
120597 nod1119894
120597 nod1119894
1205971199081119894119896
= 12058321198611198861198901199082
119896119895119871119895 (sdot) 119909
1
119894(119873) 119910
3
119896(119873 minus 1)
(33)
in which 1205832 is a learning rate Then the convergence analysisin the following theorem is to derive specific learning rate
to assure convergence of the output tracking error In orderto obtain better learning rate therefore the modified PSO isproposed to search for a better learning rate of the weights ofthe recurrent Laguerre-orthogonal-polynomial NN
The PSO [30ndash42] which has three parameters as twoacceleration coefficients 1198881 1198882 and inertia weight 120574(119899) has asignificant impact on performance of the algorithm espe-cially the impact of inertia weight The impact is differenton different conditions and is also different at different timesunder the same conditionThe PSOwith larger inertia weighthas a faster convergence speed and works well in globalsearch while the PSO with smaller inertia weight can reacha more accurate optimum value but only works well in localsearch Now dynamic inertia weight modification is used totrain the appropriate value of 120574(119899) in order to coordinatebetween search accuracy and search speedThemodifiedPSOalgorithmdepends in its implementation in the following tworelations
V119895 (119899 + 1) = 120574 (119899) V119895 (119899)
+ 120572 (119899) [11988811205931 (119875119887119895 minus 120583119898119895 (119899))
+ 11988821205932 (119875119892119895 minus 120583119898119895 (119899))] 119898 = 1 2
120583119898119895 (119899 + 1) = 120583119898119895 (119899) + V119895 (119899 + 1) 119898 = 1 2
120574 (119899) = 1205740 + 1205933 (1 minus 1205740)
120572 (119899) = 1205720 +1205721119899
119879
(34)where 119899 = 1 2 119873max indicates the iterations 120583119898119895(119899) isthe current position of particle 119875119895 in hyperspace and withrespect to learning rate 120583119898(119899) 119898 = 1 2 V119895(119899) is the currentspeed of particle 119895 120574(119899) is the inertia weight with respectiveto 119899 1198881 and 1198882 are acceleration positive constants 1205931 1205932 and1205933 are random numbers obtained from a uniform randomdistribution function in the interval [0 1] 1205740 is the initialpositive constant in the interval [0 1] 1205720 and 1205721are theinitial positive constants in the interval [0 1] 119879 denotes thenumber of generations119875119887119895 and119875119892119895 represent the best previousposition of the 119895th particle and the position of the best particleamong all particles in the population respectively Usually120574(119899) is modified gradually in descending within the limit of08 lt 120574(119899) lt 14 [40] so that search space can be changedsteadily from the global to the local Decreasing inertiaweightparticle swarm optimization is a topical algorithm of whichinertia weight 120574(119899) decreases linearly from 09 to 04 [38 39]Some scholars propose the increasing inertia weight particleswarm optimization of which inertia weight 120574(119905) increaseslinearly from 04 to 09 [40 41] 120572(119899) is the constriction factorintroduced by Eberhart and Shi [38 39] to avoid the swarmfrom premature convergence and to ensure stability of thesystem
4 Experimental Results
The whole system of the DSP-based control system for thePMSM driven V-belt CVT system is shown in Figure 1 The
10 Mathematical Problems in Engineering
Start (0 rads)(0 rpm)05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
(a)
05 s
628 rads (60 rpm)
Start (0 rads)
ee
(b)
005 s
e
0 rads (0 rpm)
314 rads (30 rpm)
(c)
Figure 6 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation119879119897 = Δ119879119901+119879un (a) tracking response of command rotor speed120596lowast
119903
desired command rotor speed120596lowast andmeasured rotor speed120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890 amplification
control algorithmwas executed by a TMS320C32DSP controlsystem including four channels of DA eight channels ofprogrammable PWM and one encoder interface circuit TheIGBT power module voltage source inverter is executed bycurrent-controlled SPWM with a switching frequency of15 kHz The specification of PMSM is a three-phase 48V750W 165 A and 3600 rpm The parameters of the PMSMare given as follows as 119877119903 = 25Ω 119871119889119903 = 119871119902119903 = 653mH119869119903 = 6215 times 10
minus3Nms 119861119903 = 618 times 10minus3Nmsrad and
119896119903 = 086NmA by using open circuit test short test rotorblock test and loading test Owing to inherent uncertaintyin V-belt CVT system (eg the lumped nonlinear externaldisturbances and parameter variations) and output currentlimitation of battery capacity the PMSM can only operate at3768 rads (3600 rpm) to avoid burning IGBT modules forV-belt CVT system at high speed perturbation
To show the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem two cases are provided in the experimentation One isthe 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand the other is the 3768 rads (3600 rpm) case under thelumped nonlinear external disturbances with twice param-eter variations 119879119897 = 2Δ119879119901 + 119879un In order to achieve goodtransient and steady-state control performance all gains of thewell-known PI controller are 119896ps = 135 and 119896is = 119896ps119879is =18 through some heuristic knowledge [47ndash50] on the tuningof the PI controller at 1884 rads (1800 rpm) case under thelumped nonlinear external disturbances with parameter vari-ation119879119897 = Δ119879119901+119879un for the speed trackingThe experimentalresults of the well-known PI controller for the V-belt CVTsystem driven by PMSM at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice
parameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures6 7 and 8 where tracking responses of the command rotorspeed 120596lowast
119903 the desired command rotor speed 120596lowast and the
measured rotor speed 120596119903 are shown in Figures 6(a) and7(a) tracking responses of the speed error 119890 are shown inFigures 6(b) and 7(b) tracking responses of the speed error119890 amplification are shown in Figures 6(c) and 7(c) Sincethe low speed operation is the same as the nominal casedue to smaller disturbance the response of speed shown inFigure 6(a) has better tracking performance Moreover thedegenerate tracking responses of speed shown in Figure 7(a)is obvious due to bigger nonlinear disturbance (eg rollingresistance wind resistance and parameter variation) at highspeed operation From the experimental results sluggishtracking responses of speed and current are obtained forthe V-belt CVT system driven by PMSM using the well-known PI controller The linear controller has the weakrobustness under bigger nonlinear disturbance because of noappropriate gains tuning or no degenerate nonlinear effect Inaddition responses of the command electromagnetic torque119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 8(a) and 8(b) respectivelyThe dynamic response of command electromagnetic torque119879119890 results in great torque ripple due to V-belt CVT systemwith nonlinear disturbance such as V-belt shaking frictionand action frictions between primary pulley and secondpulley
The control gains of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are 120578 =01 120582 = 03 All control gains of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system arechosen to achieve the best transient control performance
Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Primary
Secondary driven shaft(mounted wheel) Secondary pulley plate
V-beltSecondary
Primary
(mounted PMSM)
Primary
Primary pulley side
Secondary pulley side
pulley faces
pulley plate
pulley face
driving shaft
(a)
V-beltSecondary pulley faces
Cam
Axial cam force
Secondary driven shaft (mounted wheel)
Secondary pulley shaft
Slide bushings
Belt tension force
Springs
Secondary pulley plate
(b)
Figure 1 Structure of the V-belt CVT system (a) appearance of the primary pulley side and the secondary pulley side (b) cross-section viewof the secondary shaft
V-belt CVT system
V-belt
Primarypulley side
Secondarypulley side
Primarydriving
shaft
Secondarydrivenshaft
PMSM Je
Js Wheel
Te 120596r Bp
Bs Tsl 120596s
Figure 2 Schematic of the PMSM-wheel connection through theV-belt CVT system
V-belt CVT system in the synchronously rotating referenceframe can be described as follows [9ndash11 42ndash45]
V119902119903 = 119877119903119894119902119903 + 119871119902119903 119894119902119903 + 120596119891 (119871119889119903119894119889119903 + 120582119891119889)
V119889119903 = 119877119903119894119889119903 + 119871119889119903 119894119889119903 minus 120596119891119871119902119903119894119902119903(3)
in which V119902119903 and V119889119903 are the 119889-axis and 119902-axis stator voltages119894119902119903 and 119894119889119903 are the 119889-axis and 119902-axis stator currents 119871119902119903and 119871119889119903 are the 119889-axis and 119902-axis stator inductances 120582119891119889 isthe 119889-axis permanent magnet flux linkage 119877119903 is the statorresistance 120596119891 = 1198751199031205961199032 is the electrical angular speed
The electromagnetic torque119879119890 of the PMSMdrivenV-beltCVT system can be described as
119879119890 =3119875119903 [120582119891119889119894119902119903 + (119871119889119903 minus 119871119902119903) 119894119889119903119894119902119903]
4 (4)
in which 119875119903 is the number of poles Due to 119871119889119903 = 119871119902119903 fora surface-mounted PMSM the second term of (4) is zero
Moreover 120582119891119889 is a constant for surface-mounted PMSMTherotor flux is produced in the 119889-axis only while the currentvector is generated in the 119902-axis for the field-oriented controlWhen the 119889-axis rotor flux is a constant and torque angle is1205872 [9ndash11] the maximum torque per ampere can be reachedfor the field-oriented control The electromagnetic torque 119879119890is linearly proportional to the 119902-axis current 119894119902119903 which isdetermined by closed-loop control The control principle ofthe PMSM driven system is based on field orientation ThePMSMdrivenV-belt CVT systemwith the implementation offield-oriented control can be reduced as 119879119890 = 119896119903119894119902119903 in which119896119903 = 31198751199031205821198911198894 is the torque constant The block diagram ofthe V-belt CVT system driven by PMSM is shown in Figure 3
The whole system of the PMSM driven V-belt CVT sys-tem can be indicated as follows a field-oriented institutiona current PI control loop a sinusoidal PWM control circuitan interlock circuit and an isolated circuit an IGBT powermodule inverter and a speed control loop The PI currentloop controller is the current loop tracking controller Inorder to attain good dynamic response all gains for well-known PI current loop controller are listed as follows 119896pc =95 and 119896ic = 119896pc119879ic = 28 through some heuristicknowledge [47ndash50] on the tuning of the PI controller Thefield-oriented institution consists of the coordinate transfor-mation sin 120579119891 cos 120579119891 generation and lookup table genera-tion The TMS320C32 DSP control system manufactured bySpinel Technology Corporation is used to implement field-oriented control and speed control The V-belt CVT systemdriven by PMSM is manipulated under the lumped externaldisturbances with nonlinear uncertainties
3 Design of Hybrid RecurrentLaguerre-Orthogonal-Polynomial NNControl System
Due tononlinear uncertainties of the V-belt CVT systemdriven by PMSM such as nonlinear friction force of the trans-mission belt and clutch rolling resistance wind resistanceand braking force these will lead to degeneration of trackingresponses in command current and speed of the V-belt CVT
Mathematical Problems in Engineering 5
PMSM
C
IGBT powermoduleinverter
SinusoidalPWM circuit
Interlock andisolated circuits
Current sensorscircuit
and ADconverter
DC power
V-beltcontinuous
variabletransmission
system (CVT)
Wheel
Encoder
PMSM driven system
V-belt CVT system
PI currentloop
controller Hybrid recurrent Laguerre-
orthogonal-polynomial NN control system
Referencemodel
Field orientation and current loop control
Filter and
1 Calculation
2 Generation
with lookup
3 Coordinate translation(Clark and
Park)
Inverse coordinatetranslation (Park and Clark)
Limiter
TMS 320C32 DSP control system
Vdc = 48V
+
minus
+ minus
+ minus
ia ib ic
120579r
120579r
iqr
iqr
idr
idr = 0
1
kr
ue = Te
120596r
120596lowast
e
120596lowastr
d120579rdt
120579f = Pr120579r2
table
Σ
sin f120579cos f120579
Figure 3 Block diagram of the PMSM driven V-belt CVT system
system driven by PMSMThese nonlinear uncertainties causevariation of rotor inertia and friction for the V-belt CVTsystem driven by PMSM For convenient hybrid recurrentLaguerre-orthogonal-polynomial NN control system designthe dynamic equation of the V-belt CVT system driven byPMSM from (2) can be rewritten as
119903 = minus119861119903120596119903
119869119903minus119879119897 (119865119897 120592119886 120591119886 120596
2
119903)
119869119903+119896119903119894119902119903
119869119903
= 119860119886120596119903 + 119862119886119879119897 (119865119897 120592119886 120591119886 1205962
119903) + 119861119886119906119890
(5)
in which 119906119890 = 119879119890 is the control effort that is the commandtorque of the PMSM119860119886 = minus119861119903119869119903119861119886 = 1119869119903 and119862119886 = minus1119869119903are three known constantsWhen the uncertainties includingvariation of systemparameters and external force disturbanceoccur the parameters are assumed to be bounded that is
|119860119886120596119903| le 1198631(120596119903) |119862119886119879119897(119865119897 120592119886 120591119886 1205962
119903)| le 1198632 and 1198633 le 119861119886
where1198631(120596119903) is a known continuous function1198632 and1198633 aretwo known constantsThen the tracking error can be definedas
119890 = 120596lowastminus 120596119903 (6)
where 120596lowast represents the desired command rotor speed 119890is the tracking error between the desired rotor speed andactual rotor speed If all parameters of the V-belt CVT systemdriven by PMSM including the lumped nonlinear externaldisturbances and parameter variation are well known theideal control law can be designed as
119906lowast
119890=[lowast+ 1198961119890 minus 119860119886120596119903 minus 119862119886119879119897 (119865119897 120592119886 120591119886 120596
2
119903)]
119861119886 (7)
6 Mathematical Problems in Engineering
Recouped controller
Referencemodel
PMSM drive system and V-belt CVT driven system
Adaptivelaw
Field orientation and current loop
control
Inspectedcontroller
Lyapunovfunction
Operatorindex
Inspector control system
Filterand
Estimationlaw
Modified particleswarm optimization
Two optimal learning rates
Hybrid recurrent Laguerre-orthogonal-polynomial neural network control system
Recurrent Laguerre-orthogonal-polynomial
neural networkcontroller
+
120579r
120596r
120596lowast
e
e120596lowastr
d120579rdt
+
+
eΣ
+
minus
e
Σue = Te
Ba
Ba
12058311205832
Ψ
w2kj w1ik
1 minus zminus1Δe
urourl
ud
120578
Id
Q1
times
Figure 4 Block diagram of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system
in which 1198961 is a positive constant Substituting (6) into (4)the error dynamic equation can be obtained as follows
119890 + 1198961119890 = 0 (8)
The system state can track the desired trajectory graduallyif 119890(119905) rarr 0 as 119905 rarr infin in (8) However the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is proposed to control the CVT driven by PMSMunder uncertain perturbations The configuration of theproposed hybrid recurrent Laguerre-orthogonal-polynomialNN control system is described in Figure 4
The hybrid recurrent Laguerre-orthogonal-polynomialNN control system is composed of an inspector controlsystem a recurrent Laguerre-orthogonal-polynomial NNcontroller and a recouped controller The control law isdesigned as
119906119890 = 119906119889 + 119906rl + 119906ro (9)
where 119906119889 is the proposed inspected control that is able to sta-bilize around a predetermined bound area in the states of thecontrolled system 119906rl is the recurrent Laguerre-orthogonal-polynomial NN control which is as the major tracking con-troller It is used to imitate an ideal control lawThe recoupedcontrol 119906ro is designed to recoup the difference between the
ideal control law and the recurrent Laguerre-orthogonal-polynomial NN control Since the inspected control causedthe overdone and chattering effort the recurrent Laguerre-orthogonal-polynomial NN control and the recouped controlare proposed to reduce and smooth the control effort whenthe system states are inside the predetermined bound areaWhen the recurrent Laguerre-orthogonal-polynomial NNapproximation properties cannot be ensured the inspectedcontrol is able to act in this case
For the condition of divergence of states the design ofhybrid recurrent Laguerre-orthogonal-polynomial NN con-trol system is essential to stretch the divergent states back tothe predestinated bound areaThehybrid recurrent Laguerre-orthogonal-polynomial NN control system can uniformlyapproximate the ideal control law inside the bound areaThen stability of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system can be warranted An errordynamic equation from (5) to (9) can be acquired as
119890 = minus1198961119890 + [119906lowast
119890minus 119906119889 minus 119906rl minus 119906ro] 119861119886 (10)
Firstly the inspected control 119906119889 can be designed as
119906119889 =119868119889 sgn (119890119861119886) [1198631 (120596119903) + 1198632 +
1003816100381610038161003816lowast1003816100381610038161003816 +
100381610038161003816100381611989611198901003816100381610038161003816]
119861119886 (11)
Mathematical Problems in Engineering 7
Hiddenlayer
Outputlayer
Inputlayer i
j
k
y3k
zminus1 zminus1
zminus1zminus1zminus1
w1ik w1ik
w2kjw2kj
x1i
Σ Σ Σ
Σ
L0(middot) Lj(middot) Lnminus1(middot)
120573 120573 120573
e Δe
y2j = x3j
y1i = x2i
middot middot middot middot middot middot
Π Π
Figure 5 Structure of the three-layer recurrent Laguerre-orthogonal-polynomial NN
in which sgn(sdot) is a sign function When the recurrentLaguerre-orthogonal-polynomial NN approximation prop-erties cannot be ensured the inspected control law is ableto act in this case that is 119868119889 = 1 Due to the inadequatebound values for example1198631(120596119903)11986321198633 and sign functionthe inspected control can produce in overdone and chat-tering effort Therefore the recurrent Laguerre-orthogonal-polynomial NN control and the recouped control can bedevised to conquer the mentioned blemish The recurrentLaguerre-orthogonal-polynomial NN control raised to imi-tate the ideal control 119906lowast
119890 Then the recouped control posed
to recoup the difference between the ideal control 119906lowast119890and
the recurrent Laguerre-orthogonal-polynomial NN control119906rl
Secondly the architecture of the proposed three-layerrecurrent Laguerre-orthogonal-polynomial NN is depictedin Figure 5 It is composed of an input layer a hidden layerand an output layer The activation functions and signalactions of nodes in each layer of the recurrent Laguerre-orthogonal-polynomial NN can be described as follows
First Layer Input Layer Each node 119894 in this layer is indicatedby using Π which multiplies by each other between eachother for input signals Then outputs signals are the resultsof product The input and the output for each node 119894 in thislayer are expressed as
nod1119894= prod
119896
1199091
119894(119873)119908
1
1198941198961199103
119896(119873 minus 1)
1199101
119894= 1198911
119894(nod1119894) = nod1
119894
119894 = 1 2
(12)
The11990911= 120596lowastminus 120596119903 = 119890 is the tracking error between the desired
speed 120596lowast and the rotor speed 120596119903 The 11990912= 119890(1 minus 119911
minus1) = Δ119890
is the tracking error change The 1199081119894119896is the recurrent weight
between output layer and input layer The 119873 denotes thenumber of iterations The 1199103
119896is the output value of the out-
put layer in the recurrent Laguerre-orthogonal-polynomialNN
Second Layer Hidden LayerThe single node 119895th in this layeris labeled with Σ The net input and the net output for node119895th of the hidden layer are expressed as
nod2119895(119873) =
2
sum
119894=1
1199092
119894(119873) + 120573119910
2
119895(119873 minus 1)
1199102
119895= 1198912
119895(nod2119895) = 119871119895 (nod
2
119895)
119895 = 0 1 119898 minus 1
(13)
Laguerre-orthogonal polynomials [20ndash24] are selected foractivation function of the hidden layer The Laguerre-orthogonal polynomials are denoted by 119871119899(119909) where 119899 isthe order of expansion and minus1 lt 119909 lt 1 is the argumentof the polynomial 119898 is the number of nodes and 120573 is theself-connecting feedback gain of the hidden layer which isselected between 0 and 1 The zero the first and the secondorder Laguerre-orthogonal polynomials are given by 1198710(119909) =1 1198711(119909) = 1 minus 119909 and 1198712(119909) = 119909
2minus 4119909 + 2 respectively
The higher order polynomials are given by 1198713(119909) = minus1199093+
91199092minus 18119909 + 6 and 1198714(119909) = (35119909
4minus 30119909
2+ 3)8 The higher
order Laguerre-orthogonal polynomials may be generated bythe recursive formula given by 119871119899+1(119909) = [(2119899+1minus119909)119871119899(119909)minus119899119871119899minus1(119909)](119899 + 1)
Third Layer Output Layer The single node 119896th in this layeris labeled with Σ It computes the overall output as the
8 Mathematical Problems in Engineering
summation of all input signals The net input and the netoutput for node 119896th in this layer are expressed as
nod3119896=
119898minus1
sum
119895=0
1199082
1198961198951199093
119895(119873) 119910
3
119896= 1198913
119896(nod3119896) = nod3
119896 119896 = 1
(14)
where 1199082119896119895is the connective weight between the hidden layer
and the output layer 1198913119896is the activation function which
is selected as a linear function 1199093119895(119873) = 119910
2
119895(119873) represents
the 119895th input to the node of output layer The output valueof the recurrent Laguerre-orthogonal-polynomial NN can berepresented as 1199103
119896(119873) = 119906rl Then the output value of the
recurrent Laguerre-orthogonal-polynomial NN 119906rl can bedenoted as
119906rl = Θ119879Ψ (15)
in which Θ = [1199082
10sdot sdot sdot 119908
2
1119898minus1]119879
is the adjustable weightparameters vector between the hidden layer and the outputlayer of the recurrent Laguerre-orthogonal-polynomial NNΨ = [119909
3
0sdot sdot sdot 1199093
119898minus1]119879 is the inputs vector in the output layer
of the recurrent Laguerre-orthogonal-polynomial NN inwhich 1199093
119895is determined by the selected Laguerre-orthogonal-
polynomialsThirdly in order to evolve the recouped control 119906ro a
minimum approximation error 120575 is defined as
120575 = 119906lowast
119890minus 119906lowast
rl = 119906lowast
119890minus (Θlowast)119879Ψ (16)
in which Θlowast is an ideal weight vector to reach minimumapproximation error It is assumed that absolute value of 120575is less than a small positive value 120582 that is |120575| lt 120582 Then theerror dynamic equation from (10) can be rewritten as
119890 = minus1198961119890 + [(119906lowast
119890minus 119906rl) minus 119906rl minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl + 119906lowast
rl minus 119906rl) minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl) + (Θlowast)119879Ψ minus (Θ)
119879Ψ minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [120575 + (ΘlowastminusΘ)119879Ψ minus 119906ro minus 119906119889] 119861119886
(17)
Then the Lyapunov function is selected as
1198711 (119905) =1198902
2+(ΘlowastminusΘ)119879(ΘlowastminusΘ)
(21205831)+2
2120578 (18)
in which 1205831 is a learning rate 120578 is an adaptation gain and = minus 120582 is the bound estimated error Differentiating the
Lyapunov function with respect to 119905 and using (16) then (17)can be rewritten as
1 (119905) = 119890119890 minus(ΘlowastminusΘ)119879Θ
1205831+120582
120578
= minus1198961119890 + [120575 minus 119906ro minus 119906119889] 119861119886119890
+ (ΘlowastminusΘ)119879Ψ119861119886119890 minus
(ΘlowastminusΘ)119879Θ
1205831+120582
120578
(19)
In order to obtain 1 le 0 the adaptive law Θ and therecouped controller119906ro with estimation law can be designedas follows
Θ = 1205831Ψ119861119886119890 (20)
119906ro = sgn (119861119886119890) (21)
120582 = 120578
10038161003816100381610038161198611198861198901003816100381610038161003816
(22)
Substituting (11) (20) and (21) into (19) and using (11) with119868119889 = 0 then (19) can be represented as
1198761 (119905) = minus11989611198902+ (120575 minus sgn (119861119886119890)) 119861119886119890 +
120582
120578 (23)
Substituting (22) into (23) then (23) can be obtained as
1 (119905) le minus11989611198902+ |120575| minus 120582
10038161003816100381610038161198611198861198901003816100381610038161003816 le minus1198961119890
2le 0 (24)
From (24) the 1(119905) is a negative semidefinite that is1198761(119905) le1198761(0) It implies that 119890 and (ΘlowastminusΘ) are bounded In additionthe function is defined as
120576 (119905) = minus1 (119905) = 11989611198902 (25)
Integrating (25) with respect to 119905 then
int
119905
0
120576 (120591) 119889120591 = int
119905
0
[minus1 (119905)] 119889119905 = 1198761 (0) minus 1198761 (119905) (26)
Due to the fact that1198761(0) is bounded and1198761(119905) is nonincreas-ing and bounded then
lim119905rarrinfin
int
119905
0
120576 (120591) 119889120591 lt infin (27)
Differentiating (25) with respect to 119905 gives
120576 (119905) = 21198961119890 119890 (28)
Due to the fact that all the variables in the right side of (17)are bounded It implies that 119890 is also bounded Then 120576(119905)is a uniformly continuous function [51 52] It is denotedthat lim119905rarrinfin120576(119905) = 0 by using Barbalatrsquos lemma [51 52]Therefore 119890(119905) rarr 0 as 119905 rarr infin Furthermore In order˜toavoid chattering phenomenon of recouped controller 119906ro
Mathematical Problems in Engineering 9
the sign function sgn(119861119886119890) can be replaced by the equation119861119886119890(|119861119886119890| + 120588) where
120588 = 1205880
10038161003816100381610038161198611198861198901003816100381610038161003816 lt 120591
01003816100381610038161003816119861119886119890
1003816100381610038161003816 ge 120591(29)
in which 1205880 and 120591 are positive constantsAccording to Lyapunov stability theoremand the gradient
descent method an online parameter training methodologyof the recurrent Laguerre-orthogonal-polynomial NN canbe derived and trained effectively Then the parameter ofadaptive law Θ can be computed by the gradient descentmethod The adaptive law Θ shown in (20) calls for a properchoice of the learning rate For a small value of learning ratethe convergence of controller parameter can be guaranteedbut the convergent speed is very slow In order to achieve thefast convergence of output tracking error the modified PSOis used to obtain optimal learning rate for training parametersof the recurrent Laguerre-orthogonal-polynomial NN Firstthe parameter of adaptive law Θ shown in (20) can berewritten as
2
119896119895= 1205831119909
3
119895119861119886119890 (30)
The central part of the training algorithm for the recurrentLaguerre-orthogonal-polynomial NN is concerned with howto obtain recursively a gradient vector in which each elementin the training algorithm is defined as the derivative of anenergy function with respect to a parameter of the networkThis is done by means of the chain rule because the gradientvector is calculated in the direction opposite to the flow of theoutput of each node In order to describe the online trainingalgorithm of the recurrent Laguerre-orthogonal-polynomialNN a cost function is defined as
1198811 =1198902
2 (31)
According to the gradient descent method the adaptive lawof the weight also can be represented as
2
119896119895= minus1205831
1205971198811
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1205971199103
119896
120597 nod3119896
120597 nod3119896
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1199093
119895
(32)
Comparing (30) with (32) yields 12059711988111205971199103
119896= minus119890119861119886 Then the
convergence analysis in the following theorem is to derivespecific learning rate to assure convergence of the outputtracking error
The adaptation law of recurrent weight 1199081119894119896
using thegradient descent method can be updated as
1
119894119896= minus1205832
1205971198811
120597119906re
120597119906re1205971199103119896
1205971199103
119896
1205971199102119895
1205971199102
119895
120597 nod2119895
120597 nod2119895
1205971199101119894
1205971199101
119894
120597 nod1119894
120597 nod1119894
1205971199081119894119896
= 12058321198611198861198901199082
119896119895119871119895 (sdot) 119909
1
119894(119873) 119910
3
119896(119873 minus 1)
(33)
in which 1205832 is a learning rate Then the convergence analysisin the following theorem is to derive specific learning rate
to assure convergence of the output tracking error In orderto obtain better learning rate therefore the modified PSO isproposed to search for a better learning rate of the weights ofthe recurrent Laguerre-orthogonal-polynomial NN
The PSO [30ndash42] which has three parameters as twoacceleration coefficients 1198881 1198882 and inertia weight 120574(119899) has asignificant impact on performance of the algorithm espe-cially the impact of inertia weight The impact is differenton different conditions and is also different at different timesunder the same conditionThe PSOwith larger inertia weighthas a faster convergence speed and works well in globalsearch while the PSO with smaller inertia weight can reacha more accurate optimum value but only works well in localsearch Now dynamic inertia weight modification is used totrain the appropriate value of 120574(119899) in order to coordinatebetween search accuracy and search speedThemodifiedPSOalgorithmdepends in its implementation in the following tworelations
V119895 (119899 + 1) = 120574 (119899) V119895 (119899)
+ 120572 (119899) [11988811205931 (119875119887119895 minus 120583119898119895 (119899))
+ 11988821205932 (119875119892119895 minus 120583119898119895 (119899))] 119898 = 1 2
120583119898119895 (119899 + 1) = 120583119898119895 (119899) + V119895 (119899 + 1) 119898 = 1 2
120574 (119899) = 1205740 + 1205933 (1 minus 1205740)
120572 (119899) = 1205720 +1205721119899
119879
(34)where 119899 = 1 2 119873max indicates the iterations 120583119898119895(119899) isthe current position of particle 119875119895 in hyperspace and withrespect to learning rate 120583119898(119899) 119898 = 1 2 V119895(119899) is the currentspeed of particle 119895 120574(119899) is the inertia weight with respectiveto 119899 1198881 and 1198882 are acceleration positive constants 1205931 1205932 and1205933 are random numbers obtained from a uniform randomdistribution function in the interval [0 1] 1205740 is the initialpositive constant in the interval [0 1] 1205720 and 1205721are theinitial positive constants in the interval [0 1] 119879 denotes thenumber of generations119875119887119895 and119875119892119895 represent the best previousposition of the 119895th particle and the position of the best particleamong all particles in the population respectively Usually120574(119899) is modified gradually in descending within the limit of08 lt 120574(119899) lt 14 [40] so that search space can be changedsteadily from the global to the local Decreasing inertiaweightparticle swarm optimization is a topical algorithm of whichinertia weight 120574(119899) decreases linearly from 09 to 04 [38 39]Some scholars propose the increasing inertia weight particleswarm optimization of which inertia weight 120574(119905) increaseslinearly from 04 to 09 [40 41] 120572(119899) is the constriction factorintroduced by Eberhart and Shi [38 39] to avoid the swarmfrom premature convergence and to ensure stability of thesystem
4 Experimental Results
The whole system of the DSP-based control system for thePMSM driven V-belt CVT system is shown in Figure 1 The
10 Mathematical Problems in Engineering
Start (0 rads)(0 rpm)05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
(a)
05 s
628 rads (60 rpm)
Start (0 rads)
ee
(b)
005 s
e
0 rads (0 rpm)
314 rads (30 rpm)
(c)
Figure 6 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation119879119897 = Δ119879119901+119879un (a) tracking response of command rotor speed120596lowast
119903
desired command rotor speed120596lowast andmeasured rotor speed120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890 amplification
control algorithmwas executed by a TMS320C32DSP controlsystem including four channels of DA eight channels ofprogrammable PWM and one encoder interface circuit TheIGBT power module voltage source inverter is executed bycurrent-controlled SPWM with a switching frequency of15 kHz The specification of PMSM is a three-phase 48V750W 165 A and 3600 rpm The parameters of the PMSMare given as follows as 119877119903 = 25Ω 119871119889119903 = 119871119902119903 = 653mH119869119903 = 6215 times 10
minus3Nms 119861119903 = 618 times 10minus3Nmsrad and
119896119903 = 086NmA by using open circuit test short test rotorblock test and loading test Owing to inherent uncertaintyin V-belt CVT system (eg the lumped nonlinear externaldisturbances and parameter variations) and output currentlimitation of battery capacity the PMSM can only operate at3768 rads (3600 rpm) to avoid burning IGBT modules forV-belt CVT system at high speed perturbation
To show the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem two cases are provided in the experimentation One isthe 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand the other is the 3768 rads (3600 rpm) case under thelumped nonlinear external disturbances with twice param-eter variations 119879119897 = 2Δ119879119901 + 119879un In order to achieve goodtransient and steady-state control performance all gains of thewell-known PI controller are 119896ps = 135 and 119896is = 119896ps119879is =18 through some heuristic knowledge [47ndash50] on the tuningof the PI controller at 1884 rads (1800 rpm) case under thelumped nonlinear external disturbances with parameter vari-ation119879119897 = Δ119879119901+119879un for the speed trackingThe experimentalresults of the well-known PI controller for the V-belt CVTsystem driven by PMSM at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice
parameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures6 7 and 8 where tracking responses of the command rotorspeed 120596lowast
119903 the desired command rotor speed 120596lowast and the
measured rotor speed 120596119903 are shown in Figures 6(a) and7(a) tracking responses of the speed error 119890 are shown inFigures 6(b) and 7(b) tracking responses of the speed error119890 amplification are shown in Figures 6(c) and 7(c) Sincethe low speed operation is the same as the nominal casedue to smaller disturbance the response of speed shown inFigure 6(a) has better tracking performance Moreover thedegenerate tracking responses of speed shown in Figure 7(a)is obvious due to bigger nonlinear disturbance (eg rollingresistance wind resistance and parameter variation) at highspeed operation From the experimental results sluggishtracking responses of speed and current are obtained forthe V-belt CVT system driven by PMSM using the well-known PI controller The linear controller has the weakrobustness under bigger nonlinear disturbance because of noappropriate gains tuning or no degenerate nonlinear effect Inaddition responses of the command electromagnetic torque119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 8(a) and 8(b) respectivelyThe dynamic response of command electromagnetic torque119879119890 results in great torque ripple due to V-belt CVT systemwith nonlinear disturbance such as V-belt shaking frictionand action frictions between primary pulley and secondpulley
The control gains of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are 120578 =01 120582 = 03 All control gains of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system arechosen to achieve the best transient control performance
Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
PMSM
C
IGBT powermoduleinverter
SinusoidalPWM circuit
Interlock andisolated circuits
Current sensorscircuit
and ADconverter
DC power
V-beltcontinuous
variabletransmission
system (CVT)
Wheel
Encoder
PMSM driven system
V-belt CVT system
PI currentloop
controller Hybrid recurrent Laguerre-
orthogonal-polynomial NN control system
Referencemodel
Field orientation and current loop control
Filter and
1 Calculation
2 Generation
with lookup
3 Coordinate translation(Clark and
Park)
Inverse coordinatetranslation (Park and Clark)
Limiter
TMS 320C32 DSP control system
Vdc = 48V
+
minus
+ minus
+ minus
ia ib ic
120579r
120579r
iqr
iqr
idr
idr = 0
1
kr
ue = Te
120596r
120596lowast
e
120596lowastr
d120579rdt
120579f = Pr120579r2
table
Σ
sin f120579cos f120579
Figure 3 Block diagram of the PMSM driven V-belt CVT system
system driven by PMSMThese nonlinear uncertainties causevariation of rotor inertia and friction for the V-belt CVTsystem driven by PMSM For convenient hybrid recurrentLaguerre-orthogonal-polynomial NN control system designthe dynamic equation of the V-belt CVT system driven byPMSM from (2) can be rewritten as
119903 = minus119861119903120596119903
119869119903minus119879119897 (119865119897 120592119886 120591119886 120596
2
119903)
119869119903+119896119903119894119902119903
119869119903
= 119860119886120596119903 + 119862119886119879119897 (119865119897 120592119886 120591119886 1205962
119903) + 119861119886119906119890
(5)
in which 119906119890 = 119879119890 is the control effort that is the commandtorque of the PMSM119860119886 = minus119861119903119869119903119861119886 = 1119869119903 and119862119886 = minus1119869119903are three known constantsWhen the uncertainties includingvariation of systemparameters and external force disturbanceoccur the parameters are assumed to be bounded that is
|119860119886120596119903| le 1198631(120596119903) |119862119886119879119897(119865119897 120592119886 120591119886 1205962
119903)| le 1198632 and 1198633 le 119861119886
where1198631(120596119903) is a known continuous function1198632 and1198633 aretwo known constantsThen the tracking error can be definedas
119890 = 120596lowastminus 120596119903 (6)
where 120596lowast represents the desired command rotor speed 119890is the tracking error between the desired rotor speed andactual rotor speed If all parameters of the V-belt CVT systemdriven by PMSM including the lumped nonlinear externaldisturbances and parameter variation are well known theideal control law can be designed as
119906lowast
119890=[lowast+ 1198961119890 minus 119860119886120596119903 minus 119862119886119879119897 (119865119897 120592119886 120591119886 120596
2
119903)]
119861119886 (7)
6 Mathematical Problems in Engineering
Recouped controller
Referencemodel
PMSM drive system and V-belt CVT driven system
Adaptivelaw
Field orientation and current loop
control
Inspectedcontroller
Lyapunovfunction
Operatorindex
Inspector control system
Filterand
Estimationlaw
Modified particleswarm optimization
Two optimal learning rates
Hybrid recurrent Laguerre-orthogonal-polynomial neural network control system
Recurrent Laguerre-orthogonal-polynomial
neural networkcontroller
+
120579r
120596r
120596lowast
e
e120596lowastr
d120579rdt
+
+
eΣ
+
minus
e
Σue = Te
Ba
Ba
12058311205832
Ψ
w2kj w1ik
1 minus zminus1Δe
urourl
ud
120578
Id
Q1
times
Figure 4 Block diagram of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system
in which 1198961 is a positive constant Substituting (6) into (4)the error dynamic equation can be obtained as follows
119890 + 1198961119890 = 0 (8)
The system state can track the desired trajectory graduallyif 119890(119905) rarr 0 as 119905 rarr infin in (8) However the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is proposed to control the CVT driven by PMSMunder uncertain perturbations The configuration of theproposed hybrid recurrent Laguerre-orthogonal-polynomialNN control system is described in Figure 4
The hybrid recurrent Laguerre-orthogonal-polynomialNN control system is composed of an inspector controlsystem a recurrent Laguerre-orthogonal-polynomial NNcontroller and a recouped controller The control law isdesigned as
119906119890 = 119906119889 + 119906rl + 119906ro (9)
where 119906119889 is the proposed inspected control that is able to sta-bilize around a predetermined bound area in the states of thecontrolled system 119906rl is the recurrent Laguerre-orthogonal-polynomial NN control which is as the major tracking con-troller It is used to imitate an ideal control lawThe recoupedcontrol 119906ro is designed to recoup the difference between the
ideal control law and the recurrent Laguerre-orthogonal-polynomial NN control Since the inspected control causedthe overdone and chattering effort the recurrent Laguerre-orthogonal-polynomial NN control and the recouped controlare proposed to reduce and smooth the control effort whenthe system states are inside the predetermined bound areaWhen the recurrent Laguerre-orthogonal-polynomial NNapproximation properties cannot be ensured the inspectedcontrol is able to act in this case
For the condition of divergence of states the design ofhybrid recurrent Laguerre-orthogonal-polynomial NN con-trol system is essential to stretch the divergent states back tothe predestinated bound areaThehybrid recurrent Laguerre-orthogonal-polynomial NN control system can uniformlyapproximate the ideal control law inside the bound areaThen stability of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system can be warranted An errordynamic equation from (5) to (9) can be acquired as
119890 = minus1198961119890 + [119906lowast
119890minus 119906119889 minus 119906rl minus 119906ro] 119861119886 (10)
Firstly the inspected control 119906119889 can be designed as
119906119889 =119868119889 sgn (119890119861119886) [1198631 (120596119903) + 1198632 +
1003816100381610038161003816lowast1003816100381610038161003816 +
100381610038161003816100381611989611198901003816100381610038161003816]
119861119886 (11)
Mathematical Problems in Engineering 7
Hiddenlayer
Outputlayer
Inputlayer i
j
k
y3k
zminus1 zminus1
zminus1zminus1zminus1
w1ik w1ik
w2kjw2kj
x1i
Σ Σ Σ
Σ
L0(middot) Lj(middot) Lnminus1(middot)
120573 120573 120573
e Δe
y2j = x3j
y1i = x2i
middot middot middot middot middot middot
Π Π
Figure 5 Structure of the three-layer recurrent Laguerre-orthogonal-polynomial NN
in which sgn(sdot) is a sign function When the recurrentLaguerre-orthogonal-polynomial NN approximation prop-erties cannot be ensured the inspected control law is ableto act in this case that is 119868119889 = 1 Due to the inadequatebound values for example1198631(120596119903)11986321198633 and sign functionthe inspected control can produce in overdone and chat-tering effort Therefore the recurrent Laguerre-orthogonal-polynomial NN control and the recouped control can bedevised to conquer the mentioned blemish The recurrentLaguerre-orthogonal-polynomial NN control raised to imi-tate the ideal control 119906lowast
119890 Then the recouped control posed
to recoup the difference between the ideal control 119906lowast119890and
the recurrent Laguerre-orthogonal-polynomial NN control119906rl
Secondly the architecture of the proposed three-layerrecurrent Laguerre-orthogonal-polynomial NN is depictedin Figure 5 It is composed of an input layer a hidden layerand an output layer The activation functions and signalactions of nodes in each layer of the recurrent Laguerre-orthogonal-polynomial NN can be described as follows
First Layer Input Layer Each node 119894 in this layer is indicatedby using Π which multiplies by each other between eachother for input signals Then outputs signals are the resultsof product The input and the output for each node 119894 in thislayer are expressed as
nod1119894= prod
119896
1199091
119894(119873)119908
1
1198941198961199103
119896(119873 minus 1)
1199101
119894= 1198911
119894(nod1119894) = nod1
119894
119894 = 1 2
(12)
The11990911= 120596lowastminus 120596119903 = 119890 is the tracking error between the desired
speed 120596lowast and the rotor speed 120596119903 The 11990912= 119890(1 minus 119911
minus1) = Δ119890
is the tracking error change The 1199081119894119896is the recurrent weight
between output layer and input layer The 119873 denotes thenumber of iterations The 1199103
119896is the output value of the out-
put layer in the recurrent Laguerre-orthogonal-polynomialNN
Second Layer Hidden LayerThe single node 119895th in this layeris labeled with Σ The net input and the net output for node119895th of the hidden layer are expressed as
nod2119895(119873) =
2
sum
119894=1
1199092
119894(119873) + 120573119910
2
119895(119873 minus 1)
1199102
119895= 1198912
119895(nod2119895) = 119871119895 (nod
2
119895)
119895 = 0 1 119898 minus 1
(13)
Laguerre-orthogonal polynomials [20ndash24] are selected foractivation function of the hidden layer The Laguerre-orthogonal polynomials are denoted by 119871119899(119909) where 119899 isthe order of expansion and minus1 lt 119909 lt 1 is the argumentof the polynomial 119898 is the number of nodes and 120573 is theself-connecting feedback gain of the hidden layer which isselected between 0 and 1 The zero the first and the secondorder Laguerre-orthogonal polynomials are given by 1198710(119909) =1 1198711(119909) = 1 minus 119909 and 1198712(119909) = 119909
2minus 4119909 + 2 respectively
The higher order polynomials are given by 1198713(119909) = minus1199093+
91199092minus 18119909 + 6 and 1198714(119909) = (35119909
4minus 30119909
2+ 3)8 The higher
order Laguerre-orthogonal polynomials may be generated bythe recursive formula given by 119871119899+1(119909) = [(2119899+1minus119909)119871119899(119909)minus119899119871119899minus1(119909)](119899 + 1)
Third Layer Output Layer The single node 119896th in this layeris labeled with Σ It computes the overall output as the
8 Mathematical Problems in Engineering
summation of all input signals The net input and the netoutput for node 119896th in this layer are expressed as
nod3119896=
119898minus1
sum
119895=0
1199082
1198961198951199093
119895(119873) 119910
3
119896= 1198913
119896(nod3119896) = nod3
119896 119896 = 1
(14)
where 1199082119896119895is the connective weight between the hidden layer
and the output layer 1198913119896is the activation function which
is selected as a linear function 1199093119895(119873) = 119910
2
119895(119873) represents
the 119895th input to the node of output layer The output valueof the recurrent Laguerre-orthogonal-polynomial NN can berepresented as 1199103
119896(119873) = 119906rl Then the output value of the
recurrent Laguerre-orthogonal-polynomial NN 119906rl can bedenoted as
119906rl = Θ119879Ψ (15)
in which Θ = [1199082
10sdot sdot sdot 119908
2
1119898minus1]119879
is the adjustable weightparameters vector between the hidden layer and the outputlayer of the recurrent Laguerre-orthogonal-polynomial NNΨ = [119909
3
0sdot sdot sdot 1199093
119898minus1]119879 is the inputs vector in the output layer
of the recurrent Laguerre-orthogonal-polynomial NN inwhich 1199093
119895is determined by the selected Laguerre-orthogonal-
polynomialsThirdly in order to evolve the recouped control 119906ro a
minimum approximation error 120575 is defined as
120575 = 119906lowast
119890minus 119906lowast
rl = 119906lowast
119890minus (Θlowast)119879Ψ (16)
in which Θlowast is an ideal weight vector to reach minimumapproximation error It is assumed that absolute value of 120575is less than a small positive value 120582 that is |120575| lt 120582 Then theerror dynamic equation from (10) can be rewritten as
119890 = minus1198961119890 + [(119906lowast
119890minus 119906rl) minus 119906rl minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl + 119906lowast
rl minus 119906rl) minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl) + (Θlowast)119879Ψ minus (Θ)
119879Ψ minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [120575 + (ΘlowastminusΘ)119879Ψ minus 119906ro minus 119906119889] 119861119886
(17)
Then the Lyapunov function is selected as
1198711 (119905) =1198902
2+(ΘlowastminusΘ)119879(ΘlowastminusΘ)
(21205831)+2
2120578 (18)
in which 1205831 is a learning rate 120578 is an adaptation gain and = minus 120582 is the bound estimated error Differentiating the
Lyapunov function with respect to 119905 and using (16) then (17)can be rewritten as
1 (119905) = 119890119890 minus(ΘlowastminusΘ)119879Θ
1205831+120582
120578
= minus1198961119890 + [120575 minus 119906ro minus 119906119889] 119861119886119890
+ (ΘlowastminusΘ)119879Ψ119861119886119890 minus
(ΘlowastminusΘ)119879Θ
1205831+120582
120578
(19)
In order to obtain 1 le 0 the adaptive law Θ and therecouped controller119906ro with estimation law can be designedas follows
Θ = 1205831Ψ119861119886119890 (20)
119906ro = sgn (119861119886119890) (21)
120582 = 120578
10038161003816100381610038161198611198861198901003816100381610038161003816
(22)
Substituting (11) (20) and (21) into (19) and using (11) with119868119889 = 0 then (19) can be represented as
1198761 (119905) = minus11989611198902+ (120575 minus sgn (119861119886119890)) 119861119886119890 +
120582
120578 (23)
Substituting (22) into (23) then (23) can be obtained as
1 (119905) le minus11989611198902+ |120575| minus 120582
10038161003816100381610038161198611198861198901003816100381610038161003816 le minus1198961119890
2le 0 (24)
From (24) the 1(119905) is a negative semidefinite that is1198761(119905) le1198761(0) It implies that 119890 and (ΘlowastminusΘ) are bounded In additionthe function is defined as
120576 (119905) = minus1 (119905) = 11989611198902 (25)
Integrating (25) with respect to 119905 then
int
119905
0
120576 (120591) 119889120591 = int
119905
0
[minus1 (119905)] 119889119905 = 1198761 (0) minus 1198761 (119905) (26)
Due to the fact that1198761(0) is bounded and1198761(119905) is nonincreas-ing and bounded then
lim119905rarrinfin
int
119905
0
120576 (120591) 119889120591 lt infin (27)
Differentiating (25) with respect to 119905 gives
120576 (119905) = 21198961119890 119890 (28)
Due to the fact that all the variables in the right side of (17)are bounded It implies that 119890 is also bounded Then 120576(119905)is a uniformly continuous function [51 52] It is denotedthat lim119905rarrinfin120576(119905) = 0 by using Barbalatrsquos lemma [51 52]Therefore 119890(119905) rarr 0 as 119905 rarr infin Furthermore In order˜toavoid chattering phenomenon of recouped controller 119906ro
Mathematical Problems in Engineering 9
the sign function sgn(119861119886119890) can be replaced by the equation119861119886119890(|119861119886119890| + 120588) where
120588 = 1205880
10038161003816100381610038161198611198861198901003816100381610038161003816 lt 120591
01003816100381610038161003816119861119886119890
1003816100381610038161003816 ge 120591(29)
in which 1205880 and 120591 are positive constantsAccording to Lyapunov stability theoremand the gradient
descent method an online parameter training methodologyof the recurrent Laguerre-orthogonal-polynomial NN canbe derived and trained effectively Then the parameter ofadaptive law Θ can be computed by the gradient descentmethod The adaptive law Θ shown in (20) calls for a properchoice of the learning rate For a small value of learning ratethe convergence of controller parameter can be guaranteedbut the convergent speed is very slow In order to achieve thefast convergence of output tracking error the modified PSOis used to obtain optimal learning rate for training parametersof the recurrent Laguerre-orthogonal-polynomial NN Firstthe parameter of adaptive law Θ shown in (20) can berewritten as
2
119896119895= 1205831119909
3
119895119861119886119890 (30)
The central part of the training algorithm for the recurrentLaguerre-orthogonal-polynomial NN is concerned with howto obtain recursively a gradient vector in which each elementin the training algorithm is defined as the derivative of anenergy function with respect to a parameter of the networkThis is done by means of the chain rule because the gradientvector is calculated in the direction opposite to the flow of theoutput of each node In order to describe the online trainingalgorithm of the recurrent Laguerre-orthogonal-polynomialNN a cost function is defined as
1198811 =1198902
2 (31)
According to the gradient descent method the adaptive lawof the weight also can be represented as
2
119896119895= minus1205831
1205971198811
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1205971199103
119896
120597 nod3119896
120597 nod3119896
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1199093
119895
(32)
Comparing (30) with (32) yields 12059711988111205971199103
119896= minus119890119861119886 Then the
convergence analysis in the following theorem is to derivespecific learning rate to assure convergence of the outputtracking error
The adaptation law of recurrent weight 1199081119894119896
using thegradient descent method can be updated as
1
119894119896= minus1205832
1205971198811
120597119906re
120597119906re1205971199103119896
1205971199103
119896
1205971199102119895
1205971199102
119895
120597 nod2119895
120597 nod2119895
1205971199101119894
1205971199101
119894
120597 nod1119894
120597 nod1119894
1205971199081119894119896
= 12058321198611198861198901199082
119896119895119871119895 (sdot) 119909
1
119894(119873) 119910
3
119896(119873 minus 1)
(33)
in which 1205832 is a learning rate Then the convergence analysisin the following theorem is to derive specific learning rate
to assure convergence of the output tracking error In orderto obtain better learning rate therefore the modified PSO isproposed to search for a better learning rate of the weights ofthe recurrent Laguerre-orthogonal-polynomial NN
The PSO [30ndash42] which has three parameters as twoacceleration coefficients 1198881 1198882 and inertia weight 120574(119899) has asignificant impact on performance of the algorithm espe-cially the impact of inertia weight The impact is differenton different conditions and is also different at different timesunder the same conditionThe PSOwith larger inertia weighthas a faster convergence speed and works well in globalsearch while the PSO with smaller inertia weight can reacha more accurate optimum value but only works well in localsearch Now dynamic inertia weight modification is used totrain the appropriate value of 120574(119899) in order to coordinatebetween search accuracy and search speedThemodifiedPSOalgorithmdepends in its implementation in the following tworelations
V119895 (119899 + 1) = 120574 (119899) V119895 (119899)
+ 120572 (119899) [11988811205931 (119875119887119895 minus 120583119898119895 (119899))
+ 11988821205932 (119875119892119895 minus 120583119898119895 (119899))] 119898 = 1 2
120583119898119895 (119899 + 1) = 120583119898119895 (119899) + V119895 (119899 + 1) 119898 = 1 2
120574 (119899) = 1205740 + 1205933 (1 minus 1205740)
120572 (119899) = 1205720 +1205721119899
119879
(34)where 119899 = 1 2 119873max indicates the iterations 120583119898119895(119899) isthe current position of particle 119875119895 in hyperspace and withrespect to learning rate 120583119898(119899) 119898 = 1 2 V119895(119899) is the currentspeed of particle 119895 120574(119899) is the inertia weight with respectiveto 119899 1198881 and 1198882 are acceleration positive constants 1205931 1205932 and1205933 are random numbers obtained from a uniform randomdistribution function in the interval [0 1] 1205740 is the initialpositive constant in the interval [0 1] 1205720 and 1205721are theinitial positive constants in the interval [0 1] 119879 denotes thenumber of generations119875119887119895 and119875119892119895 represent the best previousposition of the 119895th particle and the position of the best particleamong all particles in the population respectively Usually120574(119899) is modified gradually in descending within the limit of08 lt 120574(119899) lt 14 [40] so that search space can be changedsteadily from the global to the local Decreasing inertiaweightparticle swarm optimization is a topical algorithm of whichinertia weight 120574(119899) decreases linearly from 09 to 04 [38 39]Some scholars propose the increasing inertia weight particleswarm optimization of which inertia weight 120574(119905) increaseslinearly from 04 to 09 [40 41] 120572(119899) is the constriction factorintroduced by Eberhart and Shi [38 39] to avoid the swarmfrom premature convergence and to ensure stability of thesystem
4 Experimental Results
The whole system of the DSP-based control system for thePMSM driven V-belt CVT system is shown in Figure 1 The
10 Mathematical Problems in Engineering
Start (0 rads)(0 rpm)05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
(a)
05 s
628 rads (60 rpm)
Start (0 rads)
ee
(b)
005 s
e
0 rads (0 rpm)
314 rads (30 rpm)
(c)
Figure 6 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation119879119897 = Δ119879119901+119879un (a) tracking response of command rotor speed120596lowast
119903
desired command rotor speed120596lowast andmeasured rotor speed120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890 amplification
control algorithmwas executed by a TMS320C32DSP controlsystem including four channels of DA eight channels ofprogrammable PWM and one encoder interface circuit TheIGBT power module voltage source inverter is executed bycurrent-controlled SPWM with a switching frequency of15 kHz The specification of PMSM is a three-phase 48V750W 165 A and 3600 rpm The parameters of the PMSMare given as follows as 119877119903 = 25Ω 119871119889119903 = 119871119902119903 = 653mH119869119903 = 6215 times 10
minus3Nms 119861119903 = 618 times 10minus3Nmsrad and
119896119903 = 086NmA by using open circuit test short test rotorblock test and loading test Owing to inherent uncertaintyin V-belt CVT system (eg the lumped nonlinear externaldisturbances and parameter variations) and output currentlimitation of battery capacity the PMSM can only operate at3768 rads (3600 rpm) to avoid burning IGBT modules forV-belt CVT system at high speed perturbation
To show the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem two cases are provided in the experimentation One isthe 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand the other is the 3768 rads (3600 rpm) case under thelumped nonlinear external disturbances with twice param-eter variations 119879119897 = 2Δ119879119901 + 119879un In order to achieve goodtransient and steady-state control performance all gains of thewell-known PI controller are 119896ps = 135 and 119896is = 119896ps119879is =18 through some heuristic knowledge [47ndash50] on the tuningof the PI controller at 1884 rads (1800 rpm) case under thelumped nonlinear external disturbances with parameter vari-ation119879119897 = Δ119879119901+119879un for the speed trackingThe experimentalresults of the well-known PI controller for the V-belt CVTsystem driven by PMSM at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice
parameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures6 7 and 8 where tracking responses of the command rotorspeed 120596lowast
119903 the desired command rotor speed 120596lowast and the
measured rotor speed 120596119903 are shown in Figures 6(a) and7(a) tracking responses of the speed error 119890 are shown inFigures 6(b) and 7(b) tracking responses of the speed error119890 amplification are shown in Figures 6(c) and 7(c) Sincethe low speed operation is the same as the nominal casedue to smaller disturbance the response of speed shown inFigure 6(a) has better tracking performance Moreover thedegenerate tracking responses of speed shown in Figure 7(a)is obvious due to bigger nonlinear disturbance (eg rollingresistance wind resistance and parameter variation) at highspeed operation From the experimental results sluggishtracking responses of speed and current are obtained forthe V-belt CVT system driven by PMSM using the well-known PI controller The linear controller has the weakrobustness under bigger nonlinear disturbance because of noappropriate gains tuning or no degenerate nonlinear effect Inaddition responses of the command electromagnetic torque119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 8(a) and 8(b) respectivelyThe dynamic response of command electromagnetic torque119879119890 results in great torque ripple due to V-belt CVT systemwith nonlinear disturbance such as V-belt shaking frictionand action frictions between primary pulley and secondpulley
The control gains of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are 120578 =01 120582 = 03 All control gains of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system arechosen to achieve the best transient control performance
Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Recouped controller
Referencemodel
PMSM drive system and V-belt CVT driven system
Adaptivelaw
Field orientation and current loop
control
Inspectedcontroller
Lyapunovfunction
Operatorindex
Inspector control system
Filterand
Estimationlaw
Modified particleswarm optimization
Two optimal learning rates
Hybrid recurrent Laguerre-orthogonal-polynomial neural network control system
Recurrent Laguerre-orthogonal-polynomial
neural networkcontroller
+
120579r
120596r
120596lowast
e
e120596lowastr
d120579rdt
+
+
eΣ
+
minus
e
Σue = Te
Ba
Ba
12058311205832
Ψ
w2kj w1ik
1 minus zminus1Δe
urourl
ud
120578
Id
Q1
times
Figure 4 Block diagram of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system
in which 1198961 is a positive constant Substituting (6) into (4)the error dynamic equation can be obtained as follows
119890 + 1198961119890 = 0 (8)
The system state can track the desired trajectory graduallyif 119890(119905) rarr 0 as 119905 rarr infin in (8) However the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is proposed to control the CVT driven by PMSMunder uncertain perturbations The configuration of theproposed hybrid recurrent Laguerre-orthogonal-polynomialNN control system is described in Figure 4
The hybrid recurrent Laguerre-orthogonal-polynomialNN control system is composed of an inspector controlsystem a recurrent Laguerre-orthogonal-polynomial NNcontroller and a recouped controller The control law isdesigned as
119906119890 = 119906119889 + 119906rl + 119906ro (9)
where 119906119889 is the proposed inspected control that is able to sta-bilize around a predetermined bound area in the states of thecontrolled system 119906rl is the recurrent Laguerre-orthogonal-polynomial NN control which is as the major tracking con-troller It is used to imitate an ideal control lawThe recoupedcontrol 119906ro is designed to recoup the difference between the
ideal control law and the recurrent Laguerre-orthogonal-polynomial NN control Since the inspected control causedthe overdone and chattering effort the recurrent Laguerre-orthogonal-polynomial NN control and the recouped controlare proposed to reduce and smooth the control effort whenthe system states are inside the predetermined bound areaWhen the recurrent Laguerre-orthogonal-polynomial NNapproximation properties cannot be ensured the inspectedcontrol is able to act in this case
For the condition of divergence of states the design ofhybrid recurrent Laguerre-orthogonal-polynomial NN con-trol system is essential to stretch the divergent states back tothe predestinated bound areaThehybrid recurrent Laguerre-orthogonal-polynomial NN control system can uniformlyapproximate the ideal control law inside the bound areaThen stability of the hybrid recurrent Laguerre-orthogonal-polynomial NN control system can be warranted An errordynamic equation from (5) to (9) can be acquired as
119890 = minus1198961119890 + [119906lowast
119890minus 119906119889 minus 119906rl minus 119906ro] 119861119886 (10)
Firstly the inspected control 119906119889 can be designed as
119906119889 =119868119889 sgn (119890119861119886) [1198631 (120596119903) + 1198632 +
1003816100381610038161003816lowast1003816100381610038161003816 +
100381610038161003816100381611989611198901003816100381610038161003816]
119861119886 (11)
Mathematical Problems in Engineering 7
Hiddenlayer
Outputlayer
Inputlayer i
j
k
y3k
zminus1 zminus1
zminus1zminus1zminus1
w1ik w1ik
w2kjw2kj
x1i
Σ Σ Σ
Σ
L0(middot) Lj(middot) Lnminus1(middot)
120573 120573 120573
e Δe
y2j = x3j
y1i = x2i
middot middot middot middot middot middot
Π Π
Figure 5 Structure of the three-layer recurrent Laguerre-orthogonal-polynomial NN
in which sgn(sdot) is a sign function When the recurrentLaguerre-orthogonal-polynomial NN approximation prop-erties cannot be ensured the inspected control law is ableto act in this case that is 119868119889 = 1 Due to the inadequatebound values for example1198631(120596119903)11986321198633 and sign functionthe inspected control can produce in overdone and chat-tering effort Therefore the recurrent Laguerre-orthogonal-polynomial NN control and the recouped control can bedevised to conquer the mentioned blemish The recurrentLaguerre-orthogonal-polynomial NN control raised to imi-tate the ideal control 119906lowast
119890 Then the recouped control posed
to recoup the difference between the ideal control 119906lowast119890and
the recurrent Laguerre-orthogonal-polynomial NN control119906rl
Secondly the architecture of the proposed three-layerrecurrent Laguerre-orthogonal-polynomial NN is depictedin Figure 5 It is composed of an input layer a hidden layerand an output layer The activation functions and signalactions of nodes in each layer of the recurrent Laguerre-orthogonal-polynomial NN can be described as follows
First Layer Input Layer Each node 119894 in this layer is indicatedby using Π which multiplies by each other between eachother for input signals Then outputs signals are the resultsof product The input and the output for each node 119894 in thislayer are expressed as
nod1119894= prod
119896
1199091
119894(119873)119908
1
1198941198961199103
119896(119873 minus 1)
1199101
119894= 1198911
119894(nod1119894) = nod1
119894
119894 = 1 2
(12)
The11990911= 120596lowastminus 120596119903 = 119890 is the tracking error between the desired
speed 120596lowast and the rotor speed 120596119903 The 11990912= 119890(1 minus 119911
minus1) = Δ119890
is the tracking error change The 1199081119894119896is the recurrent weight
between output layer and input layer The 119873 denotes thenumber of iterations The 1199103
119896is the output value of the out-
put layer in the recurrent Laguerre-orthogonal-polynomialNN
Second Layer Hidden LayerThe single node 119895th in this layeris labeled with Σ The net input and the net output for node119895th of the hidden layer are expressed as
nod2119895(119873) =
2
sum
119894=1
1199092
119894(119873) + 120573119910
2
119895(119873 minus 1)
1199102
119895= 1198912
119895(nod2119895) = 119871119895 (nod
2
119895)
119895 = 0 1 119898 minus 1
(13)
Laguerre-orthogonal polynomials [20ndash24] are selected foractivation function of the hidden layer The Laguerre-orthogonal polynomials are denoted by 119871119899(119909) where 119899 isthe order of expansion and minus1 lt 119909 lt 1 is the argumentof the polynomial 119898 is the number of nodes and 120573 is theself-connecting feedback gain of the hidden layer which isselected between 0 and 1 The zero the first and the secondorder Laguerre-orthogonal polynomials are given by 1198710(119909) =1 1198711(119909) = 1 minus 119909 and 1198712(119909) = 119909
2minus 4119909 + 2 respectively
The higher order polynomials are given by 1198713(119909) = minus1199093+
91199092minus 18119909 + 6 and 1198714(119909) = (35119909
4minus 30119909
2+ 3)8 The higher
order Laguerre-orthogonal polynomials may be generated bythe recursive formula given by 119871119899+1(119909) = [(2119899+1minus119909)119871119899(119909)minus119899119871119899minus1(119909)](119899 + 1)
Third Layer Output Layer The single node 119896th in this layeris labeled with Σ It computes the overall output as the
8 Mathematical Problems in Engineering
summation of all input signals The net input and the netoutput for node 119896th in this layer are expressed as
nod3119896=
119898minus1
sum
119895=0
1199082
1198961198951199093
119895(119873) 119910
3
119896= 1198913
119896(nod3119896) = nod3
119896 119896 = 1
(14)
where 1199082119896119895is the connective weight between the hidden layer
and the output layer 1198913119896is the activation function which
is selected as a linear function 1199093119895(119873) = 119910
2
119895(119873) represents
the 119895th input to the node of output layer The output valueof the recurrent Laguerre-orthogonal-polynomial NN can berepresented as 1199103
119896(119873) = 119906rl Then the output value of the
recurrent Laguerre-orthogonal-polynomial NN 119906rl can bedenoted as
119906rl = Θ119879Ψ (15)
in which Θ = [1199082
10sdot sdot sdot 119908
2
1119898minus1]119879
is the adjustable weightparameters vector between the hidden layer and the outputlayer of the recurrent Laguerre-orthogonal-polynomial NNΨ = [119909
3
0sdot sdot sdot 1199093
119898minus1]119879 is the inputs vector in the output layer
of the recurrent Laguerre-orthogonal-polynomial NN inwhich 1199093
119895is determined by the selected Laguerre-orthogonal-
polynomialsThirdly in order to evolve the recouped control 119906ro a
minimum approximation error 120575 is defined as
120575 = 119906lowast
119890minus 119906lowast
rl = 119906lowast
119890minus (Θlowast)119879Ψ (16)
in which Θlowast is an ideal weight vector to reach minimumapproximation error It is assumed that absolute value of 120575is less than a small positive value 120582 that is |120575| lt 120582 Then theerror dynamic equation from (10) can be rewritten as
119890 = minus1198961119890 + [(119906lowast
119890minus 119906rl) minus 119906rl minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl + 119906lowast
rl minus 119906rl) minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl) + (Θlowast)119879Ψ minus (Θ)
119879Ψ minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [120575 + (ΘlowastminusΘ)119879Ψ minus 119906ro minus 119906119889] 119861119886
(17)
Then the Lyapunov function is selected as
1198711 (119905) =1198902
2+(ΘlowastminusΘ)119879(ΘlowastminusΘ)
(21205831)+2
2120578 (18)
in which 1205831 is a learning rate 120578 is an adaptation gain and = minus 120582 is the bound estimated error Differentiating the
Lyapunov function with respect to 119905 and using (16) then (17)can be rewritten as
1 (119905) = 119890119890 minus(ΘlowastminusΘ)119879Θ
1205831+120582
120578
= minus1198961119890 + [120575 minus 119906ro minus 119906119889] 119861119886119890
+ (ΘlowastminusΘ)119879Ψ119861119886119890 minus
(ΘlowastminusΘ)119879Θ
1205831+120582
120578
(19)
In order to obtain 1 le 0 the adaptive law Θ and therecouped controller119906ro with estimation law can be designedas follows
Θ = 1205831Ψ119861119886119890 (20)
119906ro = sgn (119861119886119890) (21)
120582 = 120578
10038161003816100381610038161198611198861198901003816100381610038161003816
(22)
Substituting (11) (20) and (21) into (19) and using (11) with119868119889 = 0 then (19) can be represented as
1198761 (119905) = minus11989611198902+ (120575 minus sgn (119861119886119890)) 119861119886119890 +
120582
120578 (23)
Substituting (22) into (23) then (23) can be obtained as
1 (119905) le minus11989611198902+ |120575| minus 120582
10038161003816100381610038161198611198861198901003816100381610038161003816 le minus1198961119890
2le 0 (24)
From (24) the 1(119905) is a negative semidefinite that is1198761(119905) le1198761(0) It implies that 119890 and (ΘlowastminusΘ) are bounded In additionthe function is defined as
120576 (119905) = minus1 (119905) = 11989611198902 (25)
Integrating (25) with respect to 119905 then
int
119905
0
120576 (120591) 119889120591 = int
119905
0
[minus1 (119905)] 119889119905 = 1198761 (0) minus 1198761 (119905) (26)
Due to the fact that1198761(0) is bounded and1198761(119905) is nonincreas-ing and bounded then
lim119905rarrinfin
int
119905
0
120576 (120591) 119889120591 lt infin (27)
Differentiating (25) with respect to 119905 gives
120576 (119905) = 21198961119890 119890 (28)
Due to the fact that all the variables in the right side of (17)are bounded It implies that 119890 is also bounded Then 120576(119905)is a uniformly continuous function [51 52] It is denotedthat lim119905rarrinfin120576(119905) = 0 by using Barbalatrsquos lemma [51 52]Therefore 119890(119905) rarr 0 as 119905 rarr infin Furthermore In order˜toavoid chattering phenomenon of recouped controller 119906ro
Mathematical Problems in Engineering 9
the sign function sgn(119861119886119890) can be replaced by the equation119861119886119890(|119861119886119890| + 120588) where
120588 = 1205880
10038161003816100381610038161198611198861198901003816100381610038161003816 lt 120591
01003816100381610038161003816119861119886119890
1003816100381610038161003816 ge 120591(29)
in which 1205880 and 120591 are positive constantsAccording to Lyapunov stability theoremand the gradient
descent method an online parameter training methodologyof the recurrent Laguerre-orthogonal-polynomial NN canbe derived and trained effectively Then the parameter ofadaptive law Θ can be computed by the gradient descentmethod The adaptive law Θ shown in (20) calls for a properchoice of the learning rate For a small value of learning ratethe convergence of controller parameter can be guaranteedbut the convergent speed is very slow In order to achieve thefast convergence of output tracking error the modified PSOis used to obtain optimal learning rate for training parametersof the recurrent Laguerre-orthogonal-polynomial NN Firstthe parameter of adaptive law Θ shown in (20) can berewritten as
2
119896119895= 1205831119909
3
119895119861119886119890 (30)
The central part of the training algorithm for the recurrentLaguerre-orthogonal-polynomial NN is concerned with howto obtain recursively a gradient vector in which each elementin the training algorithm is defined as the derivative of anenergy function with respect to a parameter of the networkThis is done by means of the chain rule because the gradientvector is calculated in the direction opposite to the flow of theoutput of each node In order to describe the online trainingalgorithm of the recurrent Laguerre-orthogonal-polynomialNN a cost function is defined as
1198811 =1198902
2 (31)
According to the gradient descent method the adaptive lawof the weight also can be represented as
2
119896119895= minus1205831
1205971198811
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1205971199103
119896
120597 nod3119896
120597 nod3119896
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1199093
119895
(32)
Comparing (30) with (32) yields 12059711988111205971199103
119896= minus119890119861119886 Then the
convergence analysis in the following theorem is to derivespecific learning rate to assure convergence of the outputtracking error
The adaptation law of recurrent weight 1199081119894119896
using thegradient descent method can be updated as
1
119894119896= minus1205832
1205971198811
120597119906re
120597119906re1205971199103119896
1205971199103
119896
1205971199102119895
1205971199102
119895
120597 nod2119895
120597 nod2119895
1205971199101119894
1205971199101
119894
120597 nod1119894
120597 nod1119894
1205971199081119894119896
= 12058321198611198861198901199082
119896119895119871119895 (sdot) 119909
1
119894(119873) 119910
3
119896(119873 minus 1)
(33)
in which 1205832 is a learning rate Then the convergence analysisin the following theorem is to derive specific learning rate
to assure convergence of the output tracking error In orderto obtain better learning rate therefore the modified PSO isproposed to search for a better learning rate of the weights ofthe recurrent Laguerre-orthogonal-polynomial NN
The PSO [30ndash42] which has three parameters as twoacceleration coefficients 1198881 1198882 and inertia weight 120574(119899) has asignificant impact on performance of the algorithm espe-cially the impact of inertia weight The impact is differenton different conditions and is also different at different timesunder the same conditionThe PSOwith larger inertia weighthas a faster convergence speed and works well in globalsearch while the PSO with smaller inertia weight can reacha more accurate optimum value but only works well in localsearch Now dynamic inertia weight modification is used totrain the appropriate value of 120574(119899) in order to coordinatebetween search accuracy and search speedThemodifiedPSOalgorithmdepends in its implementation in the following tworelations
V119895 (119899 + 1) = 120574 (119899) V119895 (119899)
+ 120572 (119899) [11988811205931 (119875119887119895 minus 120583119898119895 (119899))
+ 11988821205932 (119875119892119895 minus 120583119898119895 (119899))] 119898 = 1 2
120583119898119895 (119899 + 1) = 120583119898119895 (119899) + V119895 (119899 + 1) 119898 = 1 2
120574 (119899) = 1205740 + 1205933 (1 minus 1205740)
120572 (119899) = 1205720 +1205721119899
119879
(34)where 119899 = 1 2 119873max indicates the iterations 120583119898119895(119899) isthe current position of particle 119875119895 in hyperspace and withrespect to learning rate 120583119898(119899) 119898 = 1 2 V119895(119899) is the currentspeed of particle 119895 120574(119899) is the inertia weight with respectiveto 119899 1198881 and 1198882 are acceleration positive constants 1205931 1205932 and1205933 are random numbers obtained from a uniform randomdistribution function in the interval [0 1] 1205740 is the initialpositive constant in the interval [0 1] 1205720 and 1205721are theinitial positive constants in the interval [0 1] 119879 denotes thenumber of generations119875119887119895 and119875119892119895 represent the best previousposition of the 119895th particle and the position of the best particleamong all particles in the population respectively Usually120574(119899) is modified gradually in descending within the limit of08 lt 120574(119899) lt 14 [40] so that search space can be changedsteadily from the global to the local Decreasing inertiaweightparticle swarm optimization is a topical algorithm of whichinertia weight 120574(119899) decreases linearly from 09 to 04 [38 39]Some scholars propose the increasing inertia weight particleswarm optimization of which inertia weight 120574(119905) increaseslinearly from 04 to 09 [40 41] 120572(119899) is the constriction factorintroduced by Eberhart and Shi [38 39] to avoid the swarmfrom premature convergence and to ensure stability of thesystem
4 Experimental Results
The whole system of the DSP-based control system for thePMSM driven V-belt CVT system is shown in Figure 1 The
10 Mathematical Problems in Engineering
Start (0 rads)(0 rpm)05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
(a)
05 s
628 rads (60 rpm)
Start (0 rads)
ee
(b)
005 s
e
0 rads (0 rpm)
314 rads (30 rpm)
(c)
Figure 6 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation119879119897 = Δ119879119901+119879un (a) tracking response of command rotor speed120596lowast
119903
desired command rotor speed120596lowast andmeasured rotor speed120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890 amplification
control algorithmwas executed by a TMS320C32DSP controlsystem including four channels of DA eight channels ofprogrammable PWM and one encoder interface circuit TheIGBT power module voltage source inverter is executed bycurrent-controlled SPWM with a switching frequency of15 kHz The specification of PMSM is a three-phase 48V750W 165 A and 3600 rpm The parameters of the PMSMare given as follows as 119877119903 = 25Ω 119871119889119903 = 119871119902119903 = 653mH119869119903 = 6215 times 10
minus3Nms 119861119903 = 618 times 10minus3Nmsrad and
119896119903 = 086NmA by using open circuit test short test rotorblock test and loading test Owing to inherent uncertaintyin V-belt CVT system (eg the lumped nonlinear externaldisturbances and parameter variations) and output currentlimitation of battery capacity the PMSM can only operate at3768 rads (3600 rpm) to avoid burning IGBT modules forV-belt CVT system at high speed perturbation
To show the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem two cases are provided in the experimentation One isthe 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand the other is the 3768 rads (3600 rpm) case under thelumped nonlinear external disturbances with twice param-eter variations 119879119897 = 2Δ119879119901 + 119879un In order to achieve goodtransient and steady-state control performance all gains of thewell-known PI controller are 119896ps = 135 and 119896is = 119896ps119879is =18 through some heuristic knowledge [47ndash50] on the tuningof the PI controller at 1884 rads (1800 rpm) case under thelumped nonlinear external disturbances with parameter vari-ation119879119897 = Δ119879119901+119879un for the speed trackingThe experimentalresults of the well-known PI controller for the V-belt CVTsystem driven by PMSM at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice
parameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures6 7 and 8 where tracking responses of the command rotorspeed 120596lowast
119903 the desired command rotor speed 120596lowast and the
measured rotor speed 120596119903 are shown in Figures 6(a) and7(a) tracking responses of the speed error 119890 are shown inFigures 6(b) and 7(b) tracking responses of the speed error119890 amplification are shown in Figures 6(c) and 7(c) Sincethe low speed operation is the same as the nominal casedue to smaller disturbance the response of speed shown inFigure 6(a) has better tracking performance Moreover thedegenerate tracking responses of speed shown in Figure 7(a)is obvious due to bigger nonlinear disturbance (eg rollingresistance wind resistance and parameter variation) at highspeed operation From the experimental results sluggishtracking responses of speed and current are obtained forthe V-belt CVT system driven by PMSM using the well-known PI controller The linear controller has the weakrobustness under bigger nonlinear disturbance because of noappropriate gains tuning or no degenerate nonlinear effect Inaddition responses of the command electromagnetic torque119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 8(a) and 8(b) respectivelyThe dynamic response of command electromagnetic torque119879119890 results in great torque ripple due to V-belt CVT systemwith nonlinear disturbance such as V-belt shaking frictionand action frictions between primary pulley and secondpulley
The control gains of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are 120578 =01 120582 = 03 All control gains of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system arechosen to achieve the best transient control performance
Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Hiddenlayer
Outputlayer
Inputlayer i
j
k
y3k
zminus1 zminus1
zminus1zminus1zminus1
w1ik w1ik
w2kjw2kj
x1i
Σ Σ Σ
Σ
L0(middot) Lj(middot) Lnminus1(middot)
120573 120573 120573
e Δe
y2j = x3j
y1i = x2i
middot middot middot middot middot middot
Π Π
Figure 5 Structure of the three-layer recurrent Laguerre-orthogonal-polynomial NN
in which sgn(sdot) is a sign function When the recurrentLaguerre-orthogonal-polynomial NN approximation prop-erties cannot be ensured the inspected control law is ableto act in this case that is 119868119889 = 1 Due to the inadequatebound values for example1198631(120596119903)11986321198633 and sign functionthe inspected control can produce in overdone and chat-tering effort Therefore the recurrent Laguerre-orthogonal-polynomial NN control and the recouped control can bedevised to conquer the mentioned blemish The recurrentLaguerre-orthogonal-polynomial NN control raised to imi-tate the ideal control 119906lowast
119890 Then the recouped control posed
to recoup the difference between the ideal control 119906lowast119890and
the recurrent Laguerre-orthogonal-polynomial NN control119906rl
Secondly the architecture of the proposed three-layerrecurrent Laguerre-orthogonal-polynomial NN is depictedin Figure 5 It is composed of an input layer a hidden layerand an output layer The activation functions and signalactions of nodes in each layer of the recurrent Laguerre-orthogonal-polynomial NN can be described as follows
First Layer Input Layer Each node 119894 in this layer is indicatedby using Π which multiplies by each other between eachother for input signals Then outputs signals are the resultsof product The input and the output for each node 119894 in thislayer are expressed as
nod1119894= prod
119896
1199091
119894(119873)119908
1
1198941198961199103
119896(119873 minus 1)
1199101
119894= 1198911
119894(nod1119894) = nod1
119894
119894 = 1 2
(12)
The11990911= 120596lowastminus 120596119903 = 119890 is the tracking error between the desired
speed 120596lowast and the rotor speed 120596119903 The 11990912= 119890(1 minus 119911
minus1) = Δ119890
is the tracking error change The 1199081119894119896is the recurrent weight
between output layer and input layer The 119873 denotes thenumber of iterations The 1199103
119896is the output value of the out-
put layer in the recurrent Laguerre-orthogonal-polynomialNN
Second Layer Hidden LayerThe single node 119895th in this layeris labeled with Σ The net input and the net output for node119895th of the hidden layer are expressed as
nod2119895(119873) =
2
sum
119894=1
1199092
119894(119873) + 120573119910
2
119895(119873 minus 1)
1199102
119895= 1198912
119895(nod2119895) = 119871119895 (nod
2
119895)
119895 = 0 1 119898 minus 1
(13)
Laguerre-orthogonal polynomials [20ndash24] are selected foractivation function of the hidden layer The Laguerre-orthogonal polynomials are denoted by 119871119899(119909) where 119899 isthe order of expansion and minus1 lt 119909 lt 1 is the argumentof the polynomial 119898 is the number of nodes and 120573 is theself-connecting feedback gain of the hidden layer which isselected between 0 and 1 The zero the first and the secondorder Laguerre-orthogonal polynomials are given by 1198710(119909) =1 1198711(119909) = 1 minus 119909 and 1198712(119909) = 119909
2minus 4119909 + 2 respectively
The higher order polynomials are given by 1198713(119909) = minus1199093+
91199092minus 18119909 + 6 and 1198714(119909) = (35119909
4minus 30119909
2+ 3)8 The higher
order Laguerre-orthogonal polynomials may be generated bythe recursive formula given by 119871119899+1(119909) = [(2119899+1minus119909)119871119899(119909)minus119899119871119899minus1(119909)](119899 + 1)
Third Layer Output Layer The single node 119896th in this layeris labeled with Σ It computes the overall output as the
8 Mathematical Problems in Engineering
summation of all input signals The net input and the netoutput for node 119896th in this layer are expressed as
nod3119896=
119898minus1
sum
119895=0
1199082
1198961198951199093
119895(119873) 119910
3
119896= 1198913
119896(nod3119896) = nod3
119896 119896 = 1
(14)
where 1199082119896119895is the connective weight between the hidden layer
and the output layer 1198913119896is the activation function which
is selected as a linear function 1199093119895(119873) = 119910
2
119895(119873) represents
the 119895th input to the node of output layer The output valueof the recurrent Laguerre-orthogonal-polynomial NN can berepresented as 1199103
119896(119873) = 119906rl Then the output value of the
recurrent Laguerre-orthogonal-polynomial NN 119906rl can bedenoted as
119906rl = Θ119879Ψ (15)
in which Θ = [1199082
10sdot sdot sdot 119908
2
1119898minus1]119879
is the adjustable weightparameters vector between the hidden layer and the outputlayer of the recurrent Laguerre-orthogonal-polynomial NNΨ = [119909
3
0sdot sdot sdot 1199093
119898minus1]119879 is the inputs vector in the output layer
of the recurrent Laguerre-orthogonal-polynomial NN inwhich 1199093
119895is determined by the selected Laguerre-orthogonal-
polynomialsThirdly in order to evolve the recouped control 119906ro a
minimum approximation error 120575 is defined as
120575 = 119906lowast
119890minus 119906lowast
rl = 119906lowast
119890minus (Θlowast)119879Ψ (16)
in which Θlowast is an ideal weight vector to reach minimumapproximation error It is assumed that absolute value of 120575is less than a small positive value 120582 that is |120575| lt 120582 Then theerror dynamic equation from (10) can be rewritten as
119890 = minus1198961119890 + [(119906lowast
119890minus 119906rl) minus 119906rl minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl + 119906lowast
rl minus 119906rl) minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl) + (Θlowast)119879Ψ minus (Θ)
119879Ψ minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [120575 + (ΘlowastminusΘ)119879Ψ minus 119906ro minus 119906119889] 119861119886
(17)
Then the Lyapunov function is selected as
1198711 (119905) =1198902
2+(ΘlowastminusΘ)119879(ΘlowastminusΘ)
(21205831)+2
2120578 (18)
in which 1205831 is a learning rate 120578 is an adaptation gain and = minus 120582 is the bound estimated error Differentiating the
Lyapunov function with respect to 119905 and using (16) then (17)can be rewritten as
1 (119905) = 119890119890 minus(ΘlowastminusΘ)119879Θ
1205831+120582
120578
= minus1198961119890 + [120575 minus 119906ro minus 119906119889] 119861119886119890
+ (ΘlowastminusΘ)119879Ψ119861119886119890 minus
(ΘlowastminusΘ)119879Θ
1205831+120582
120578
(19)
In order to obtain 1 le 0 the adaptive law Θ and therecouped controller119906ro with estimation law can be designedas follows
Θ = 1205831Ψ119861119886119890 (20)
119906ro = sgn (119861119886119890) (21)
120582 = 120578
10038161003816100381610038161198611198861198901003816100381610038161003816
(22)
Substituting (11) (20) and (21) into (19) and using (11) with119868119889 = 0 then (19) can be represented as
1198761 (119905) = minus11989611198902+ (120575 minus sgn (119861119886119890)) 119861119886119890 +
120582
120578 (23)
Substituting (22) into (23) then (23) can be obtained as
1 (119905) le minus11989611198902+ |120575| minus 120582
10038161003816100381610038161198611198861198901003816100381610038161003816 le minus1198961119890
2le 0 (24)
From (24) the 1(119905) is a negative semidefinite that is1198761(119905) le1198761(0) It implies that 119890 and (ΘlowastminusΘ) are bounded In additionthe function is defined as
120576 (119905) = minus1 (119905) = 11989611198902 (25)
Integrating (25) with respect to 119905 then
int
119905
0
120576 (120591) 119889120591 = int
119905
0
[minus1 (119905)] 119889119905 = 1198761 (0) minus 1198761 (119905) (26)
Due to the fact that1198761(0) is bounded and1198761(119905) is nonincreas-ing and bounded then
lim119905rarrinfin
int
119905
0
120576 (120591) 119889120591 lt infin (27)
Differentiating (25) with respect to 119905 gives
120576 (119905) = 21198961119890 119890 (28)
Due to the fact that all the variables in the right side of (17)are bounded It implies that 119890 is also bounded Then 120576(119905)is a uniformly continuous function [51 52] It is denotedthat lim119905rarrinfin120576(119905) = 0 by using Barbalatrsquos lemma [51 52]Therefore 119890(119905) rarr 0 as 119905 rarr infin Furthermore In order˜toavoid chattering phenomenon of recouped controller 119906ro
Mathematical Problems in Engineering 9
the sign function sgn(119861119886119890) can be replaced by the equation119861119886119890(|119861119886119890| + 120588) where
120588 = 1205880
10038161003816100381610038161198611198861198901003816100381610038161003816 lt 120591
01003816100381610038161003816119861119886119890
1003816100381610038161003816 ge 120591(29)
in which 1205880 and 120591 are positive constantsAccording to Lyapunov stability theoremand the gradient
descent method an online parameter training methodologyof the recurrent Laguerre-orthogonal-polynomial NN canbe derived and trained effectively Then the parameter ofadaptive law Θ can be computed by the gradient descentmethod The adaptive law Θ shown in (20) calls for a properchoice of the learning rate For a small value of learning ratethe convergence of controller parameter can be guaranteedbut the convergent speed is very slow In order to achieve thefast convergence of output tracking error the modified PSOis used to obtain optimal learning rate for training parametersof the recurrent Laguerre-orthogonal-polynomial NN Firstthe parameter of adaptive law Θ shown in (20) can berewritten as
2
119896119895= 1205831119909
3
119895119861119886119890 (30)
The central part of the training algorithm for the recurrentLaguerre-orthogonal-polynomial NN is concerned with howto obtain recursively a gradient vector in which each elementin the training algorithm is defined as the derivative of anenergy function with respect to a parameter of the networkThis is done by means of the chain rule because the gradientvector is calculated in the direction opposite to the flow of theoutput of each node In order to describe the online trainingalgorithm of the recurrent Laguerre-orthogonal-polynomialNN a cost function is defined as
1198811 =1198902
2 (31)
According to the gradient descent method the adaptive lawof the weight also can be represented as
2
119896119895= minus1205831
1205971198811
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1205971199103
119896
120597 nod3119896
120597 nod3119896
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1199093
119895
(32)
Comparing (30) with (32) yields 12059711988111205971199103
119896= minus119890119861119886 Then the
convergence analysis in the following theorem is to derivespecific learning rate to assure convergence of the outputtracking error
The adaptation law of recurrent weight 1199081119894119896
using thegradient descent method can be updated as
1
119894119896= minus1205832
1205971198811
120597119906re
120597119906re1205971199103119896
1205971199103
119896
1205971199102119895
1205971199102
119895
120597 nod2119895
120597 nod2119895
1205971199101119894
1205971199101
119894
120597 nod1119894
120597 nod1119894
1205971199081119894119896
= 12058321198611198861198901199082
119896119895119871119895 (sdot) 119909
1
119894(119873) 119910
3
119896(119873 minus 1)
(33)
in which 1205832 is a learning rate Then the convergence analysisin the following theorem is to derive specific learning rate
to assure convergence of the output tracking error In orderto obtain better learning rate therefore the modified PSO isproposed to search for a better learning rate of the weights ofthe recurrent Laguerre-orthogonal-polynomial NN
The PSO [30ndash42] which has three parameters as twoacceleration coefficients 1198881 1198882 and inertia weight 120574(119899) has asignificant impact on performance of the algorithm espe-cially the impact of inertia weight The impact is differenton different conditions and is also different at different timesunder the same conditionThe PSOwith larger inertia weighthas a faster convergence speed and works well in globalsearch while the PSO with smaller inertia weight can reacha more accurate optimum value but only works well in localsearch Now dynamic inertia weight modification is used totrain the appropriate value of 120574(119899) in order to coordinatebetween search accuracy and search speedThemodifiedPSOalgorithmdepends in its implementation in the following tworelations
V119895 (119899 + 1) = 120574 (119899) V119895 (119899)
+ 120572 (119899) [11988811205931 (119875119887119895 minus 120583119898119895 (119899))
+ 11988821205932 (119875119892119895 minus 120583119898119895 (119899))] 119898 = 1 2
120583119898119895 (119899 + 1) = 120583119898119895 (119899) + V119895 (119899 + 1) 119898 = 1 2
120574 (119899) = 1205740 + 1205933 (1 minus 1205740)
120572 (119899) = 1205720 +1205721119899
119879
(34)where 119899 = 1 2 119873max indicates the iterations 120583119898119895(119899) isthe current position of particle 119875119895 in hyperspace and withrespect to learning rate 120583119898(119899) 119898 = 1 2 V119895(119899) is the currentspeed of particle 119895 120574(119899) is the inertia weight with respectiveto 119899 1198881 and 1198882 are acceleration positive constants 1205931 1205932 and1205933 are random numbers obtained from a uniform randomdistribution function in the interval [0 1] 1205740 is the initialpositive constant in the interval [0 1] 1205720 and 1205721are theinitial positive constants in the interval [0 1] 119879 denotes thenumber of generations119875119887119895 and119875119892119895 represent the best previousposition of the 119895th particle and the position of the best particleamong all particles in the population respectively Usually120574(119899) is modified gradually in descending within the limit of08 lt 120574(119899) lt 14 [40] so that search space can be changedsteadily from the global to the local Decreasing inertiaweightparticle swarm optimization is a topical algorithm of whichinertia weight 120574(119899) decreases linearly from 09 to 04 [38 39]Some scholars propose the increasing inertia weight particleswarm optimization of which inertia weight 120574(119905) increaseslinearly from 04 to 09 [40 41] 120572(119899) is the constriction factorintroduced by Eberhart and Shi [38 39] to avoid the swarmfrom premature convergence and to ensure stability of thesystem
4 Experimental Results
The whole system of the DSP-based control system for thePMSM driven V-belt CVT system is shown in Figure 1 The
10 Mathematical Problems in Engineering
Start (0 rads)(0 rpm)05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
(a)
05 s
628 rads (60 rpm)
Start (0 rads)
ee
(b)
005 s
e
0 rads (0 rpm)
314 rads (30 rpm)
(c)
Figure 6 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation119879119897 = Δ119879119901+119879un (a) tracking response of command rotor speed120596lowast
119903
desired command rotor speed120596lowast andmeasured rotor speed120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890 amplification
control algorithmwas executed by a TMS320C32DSP controlsystem including four channels of DA eight channels ofprogrammable PWM and one encoder interface circuit TheIGBT power module voltage source inverter is executed bycurrent-controlled SPWM with a switching frequency of15 kHz The specification of PMSM is a three-phase 48V750W 165 A and 3600 rpm The parameters of the PMSMare given as follows as 119877119903 = 25Ω 119871119889119903 = 119871119902119903 = 653mH119869119903 = 6215 times 10
minus3Nms 119861119903 = 618 times 10minus3Nmsrad and
119896119903 = 086NmA by using open circuit test short test rotorblock test and loading test Owing to inherent uncertaintyin V-belt CVT system (eg the lumped nonlinear externaldisturbances and parameter variations) and output currentlimitation of battery capacity the PMSM can only operate at3768 rads (3600 rpm) to avoid burning IGBT modules forV-belt CVT system at high speed perturbation
To show the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem two cases are provided in the experimentation One isthe 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand the other is the 3768 rads (3600 rpm) case under thelumped nonlinear external disturbances with twice param-eter variations 119879119897 = 2Δ119879119901 + 119879un In order to achieve goodtransient and steady-state control performance all gains of thewell-known PI controller are 119896ps = 135 and 119896is = 119896ps119879is =18 through some heuristic knowledge [47ndash50] on the tuningof the PI controller at 1884 rads (1800 rpm) case under thelumped nonlinear external disturbances with parameter vari-ation119879119897 = Δ119879119901+119879un for the speed trackingThe experimentalresults of the well-known PI controller for the V-belt CVTsystem driven by PMSM at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice
parameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures6 7 and 8 where tracking responses of the command rotorspeed 120596lowast
119903 the desired command rotor speed 120596lowast and the
measured rotor speed 120596119903 are shown in Figures 6(a) and7(a) tracking responses of the speed error 119890 are shown inFigures 6(b) and 7(b) tracking responses of the speed error119890 amplification are shown in Figures 6(c) and 7(c) Sincethe low speed operation is the same as the nominal casedue to smaller disturbance the response of speed shown inFigure 6(a) has better tracking performance Moreover thedegenerate tracking responses of speed shown in Figure 7(a)is obvious due to bigger nonlinear disturbance (eg rollingresistance wind resistance and parameter variation) at highspeed operation From the experimental results sluggishtracking responses of speed and current are obtained forthe V-belt CVT system driven by PMSM using the well-known PI controller The linear controller has the weakrobustness under bigger nonlinear disturbance because of noappropriate gains tuning or no degenerate nonlinear effect Inaddition responses of the command electromagnetic torque119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 8(a) and 8(b) respectivelyThe dynamic response of command electromagnetic torque119879119890 results in great torque ripple due to V-belt CVT systemwith nonlinear disturbance such as V-belt shaking frictionand action frictions between primary pulley and secondpulley
The control gains of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are 120578 =01 120582 = 03 All control gains of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system arechosen to achieve the best transient control performance
Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
summation of all input signals The net input and the netoutput for node 119896th in this layer are expressed as
nod3119896=
119898minus1
sum
119895=0
1199082
1198961198951199093
119895(119873) 119910
3
119896= 1198913
119896(nod3119896) = nod3
119896 119896 = 1
(14)
where 1199082119896119895is the connective weight between the hidden layer
and the output layer 1198913119896is the activation function which
is selected as a linear function 1199093119895(119873) = 119910
2
119895(119873) represents
the 119895th input to the node of output layer The output valueof the recurrent Laguerre-orthogonal-polynomial NN can berepresented as 1199103
119896(119873) = 119906rl Then the output value of the
recurrent Laguerre-orthogonal-polynomial NN 119906rl can bedenoted as
119906rl = Θ119879Ψ (15)
in which Θ = [1199082
10sdot sdot sdot 119908
2
1119898minus1]119879
is the adjustable weightparameters vector between the hidden layer and the outputlayer of the recurrent Laguerre-orthogonal-polynomial NNΨ = [119909
3
0sdot sdot sdot 1199093
119898minus1]119879 is the inputs vector in the output layer
of the recurrent Laguerre-orthogonal-polynomial NN inwhich 1199093
119895is determined by the selected Laguerre-orthogonal-
polynomialsThirdly in order to evolve the recouped control 119906ro a
minimum approximation error 120575 is defined as
120575 = 119906lowast
119890minus 119906lowast
rl = 119906lowast
119890minus (Θlowast)119879Ψ (16)
in which Θlowast is an ideal weight vector to reach minimumapproximation error It is assumed that absolute value of 120575is less than a small positive value 120582 that is |120575| lt 120582 Then theerror dynamic equation from (10) can be rewritten as
119890 = minus1198961119890 + [(119906lowast
119890minus 119906rl) minus 119906rl minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl + 119906lowast
rl minus 119906rl) minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [(119906lowast
119890minus 119906lowast
rl) + (Θlowast)119879Ψ minus (Θ)
119879Ψ minus 119906ro minus 119906119889] 119861119886
= minus1198961119890 + [120575 + (ΘlowastminusΘ)119879Ψ minus 119906ro minus 119906119889] 119861119886
(17)
Then the Lyapunov function is selected as
1198711 (119905) =1198902
2+(ΘlowastminusΘ)119879(ΘlowastminusΘ)
(21205831)+2
2120578 (18)
in which 1205831 is a learning rate 120578 is an adaptation gain and = minus 120582 is the bound estimated error Differentiating the
Lyapunov function with respect to 119905 and using (16) then (17)can be rewritten as
1 (119905) = 119890119890 minus(ΘlowastminusΘ)119879Θ
1205831+120582
120578
= minus1198961119890 + [120575 minus 119906ro minus 119906119889] 119861119886119890
+ (ΘlowastminusΘ)119879Ψ119861119886119890 minus
(ΘlowastminusΘ)119879Θ
1205831+120582
120578
(19)
In order to obtain 1 le 0 the adaptive law Θ and therecouped controller119906ro with estimation law can be designedas follows
Θ = 1205831Ψ119861119886119890 (20)
119906ro = sgn (119861119886119890) (21)
120582 = 120578
10038161003816100381610038161198611198861198901003816100381610038161003816
(22)
Substituting (11) (20) and (21) into (19) and using (11) with119868119889 = 0 then (19) can be represented as
1198761 (119905) = minus11989611198902+ (120575 minus sgn (119861119886119890)) 119861119886119890 +
120582
120578 (23)
Substituting (22) into (23) then (23) can be obtained as
1 (119905) le minus11989611198902+ |120575| minus 120582
10038161003816100381610038161198611198861198901003816100381610038161003816 le minus1198961119890
2le 0 (24)
From (24) the 1(119905) is a negative semidefinite that is1198761(119905) le1198761(0) It implies that 119890 and (ΘlowastminusΘ) are bounded In additionthe function is defined as
120576 (119905) = minus1 (119905) = 11989611198902 (25)
Integrating (25) with respect to 119905 then
int
119905
0
120576 (120591) 119889120591 = int
119905
0
[minus1 (119905)] 119889119905 = 1198761 (0) minus 1198761 (119905) (26)
Due to the fact that1198761(0) is bounded and1198761(119905) is nonincreas-ing and bounded then
lim119905rarrinfin
int
119905
0
120576 (120591) 119889120591 lt infin (27)
Differentiating (25) with respect to 119905 gives
120576 (119905) = 21198961119890 119890 (28)
Due to the fact that all the variables in the right side of (17)are bounded It implies that 119890 is also bounded Then 120576(119905)is a uniformly continuous function [51 52] It is denotedthat lim119905rarrinfin120576(119905) = 0 by using Barbalatrsquos lemma [51 52]Therefore 119890(119905) rarr 0 as 119905 rarr infin Furthermore In order˜toavoid chattering phenomenon of recouped controller 119906ro
Mathematical Problems in Engineering 9
the sign function sgn(119861119886119890) can be replaced by the equation119861119886119890(|119861119886119890| + 120588) where
120588 = 1205880
10038161003816100381610038161198611198861198901003816100381610038161003816 lt 120591
01003816100381610038161003816119861119886119890
1003816100381610038161003816 ge 120591(29)
in which 1205880 and 120591 are positive constantsAccording to Lyapunov stability theoremand the gradient
descent method an online parameter training methodologyof the recurrent Laguerre-orthogonal-polynomial NN canbe derived and trained effectively Then the parameter ofadaptive law Θ can be computed by the gradient descentmethod The adaptive law Θ shown in (20) calls for a properchoice of the learning rate For a small value of learning ratethe convergence of controller parameter can be guaranteedbut the convergent speed is very slow In order to achieve thefast convergence of output tracking error the modified PSOis used to obtain optimal learning rate for training parametersof the recurrent Laguerre-orthogonal-polynomial NN Firstthe parameter of adaptive law Θ shown in (20) can berewritten as
2
119896119895= 1205831119909
3
119895119861119886119890 (30)
The central part of the training algorithm for the recurrentLaguerre-orthogonal-polynomial NN is concerned with howto obtain recursively a gradient vector in which each elementin the training algorithm is defined as the derivative of anenergy function with respect to a parameter of the networkThis is done by means of the chain rule because the gradientvector is calculated in the direction opposite to the flow of theoutput of each node In order to describe the online trainingalgorithm of the recurrent Laguerre-orthogonal-polynomialNN a cost function is defined as
1198811 =1198902
2 (31)
According to the gradient descent method the adaptive lawof the weight also can be represented as
2
119896119895= minus1205831
1205971198811
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1205971199103
119896
120597 nod3119896
120597 nod3119896
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1199093
119895
(32)
Comparing (30) with (32) yields 12059711988111205971199103
119896= minus119890119861119886 Then the
convergence analysis in the following theorem is to derivespecific learning rate to assure convergence of the outputtracking error
The adaptation law of recurrent weight 1199081119894119896
using thegradient descent method can be updated as
1
119894119896= minus1205832
1205971198811
120597119906re
120597119906re1205971199103119896
1205971199103
119896
1205971199102119895
1205971199102
119895
120597 nod2119895
120597 nod2119895
1205971199101119894
1205971199101
119894
120597 nod1119894
120597 nod1119894
1205971199081119894119896
= 12058321198611198861198901199082
119896119895119871119895 (sdot) 119909
1
119894(119873) 119910
3
119896(119873 minus 1)
(33)
in which 1205832 is a learning rate Then the convergence analysisin the following theorem is to derive specific learning rate
to assure convergence of the output tracking error In orderto obtain better learning rate therefore the modified PSO isproposed to search for a better learning rate of the weights ofthe recurrent Laguerre-orthogonal-polynomial NN
The PSO [30ndash42] which has three parameters as twoacceleration coefficients 1198881 1198882 and inertia weight 120574(119899) has asignificant impact on performance of the algorithm espe-cially the impact of inertia weight The impact is differenton different conditions and is also different at different timesunder the same conditionThe PSOwith larger inertia weighthas a faster convergence speed and works well in globalsearch while the PSO with smaller inertia weight can reacha more accurate optimum value but only works well in localsearch Now dynamic inertia weight modification is used totrain the appropriate value of 120574(119899) in order to coordinatebetween search accuracy and search speedThemodifiedPSOalgorithmdepends in its implementation in the following tworelations
V119895 (119899 + 1) = 120574 (119899) V119895 (119899)
+ 120572 (119899) [11988811205931 (119875119887119895 minus 120583119898119895 (119899))
+ 11988821205932 (119875119892119895 minus 120583119898119895 (119899))] 119898 = 1 2
120583119898119895 (119899 + 1) = 120583119898119895 (119899) + V119895 (119899 + 1) 119898 = 1 2
120574 (119899) = 1205740 + 1205933 (1 minus 1205740)
120572 (119899) = 1205720 +1205721119899
119879
(34)where 119899 = 1 2 119873max indicates the iterations 120583119898119895(119899) isthe current position of particle 119875119895 in hyperspace and withrespect to learning rate 120583119898(119899) 119898 = 1 2 V119895(119899) is the currentspeed of particle 119895 120574(119899) is the inertia weight with respectiveto 119899 1198881 and 1198882 are acceleration positive constants 1205931 1205932 and1205933 are random numbers obtained from a uniform randomdistribution function in the interval [0 1] 1205740 is the initialpositive constant in the interval [0 1] 1205720 and 1205721are theinitial positive constants in the interval [0 1] 119879 denotes thenumber of generations119875119887119895 and119875119892119895 represent the best previousposition of the 119895th particle and the position of the best particleamong all particles in the population respectively Usually120574(119899) is modified gradually in descending within the limit of08 lt 120574(119899) lt 14 [40] so that search space can be changedsteadily from the global to the local Decreasing inertiaweightparticle swarm optimization is a topical algorithm of whichinertia weight 120574(119899) decreases linearly from 09 to 04 [38 39]Some scholars propose the increasing inertia weight particleswarm optimization of which inertia weight 120574(119905) increaseslinearly from 04 to 09 [40 41] 120572(119899) is the constriction factorintroduced by Eberhart and Shi [38 39] to avoid the swarmfrom premature convergence and to ensure stability of thesystem
4 Experimental Results
The whole system of the DSP-based control system for thePMSM driven V-belt CVT system is shown in Figure 1 The
10 Mathematical Problems in Engineering
Start (0 rads)(0 rpm)05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
(a)
05 s
628 rads (60 rpm)
Start (0 rads)
ee
(b)
005 s
e
0 rads (0 rpm)
314 rads (30 rpm)
(c)
Figure 6 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation119879119897 = Δ119879119901+119879un (a) tracking response of command rotor speed120596lowast
119903
desired command rotor speed120596lowast andmeasured rotor speed120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890 amplification
control algorithmwas executed by a TMS320C32DSP controlsystem including four channels of DA eight channels ofprogrammable PWM and one encoder interface circuit TheIGBT power module voltage source inverter is executed bycurrent-controlled SPWM with a switching frequency of15 kHz The specification of PMSM is a three-phase 48V750W 165 A and 3600 rpm The parameters of the PMSMare given as follows as 119877119903 = 25Ω 119871119889119903 = 119871119902119903 = 653mH119869119903 = 6215 times 10
minus3Nms 119861119903 = 618 times 10minus3Nmsrad and
119896119903 = 086NmA by using open circuit test short test rotorblock test and loading test Owing to inherent uncertaintyin V-belt CVT system (eg the lumped nonlinear externaldisturbances and parameter variations) and output currentlimitation of battery capacity the PMSM can only operate at3768 rads (3600 rpm) to avoid burning IGBT modules forV-belt CVT system at high speed perturbation
To show the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem two cases are provided in the experimentation One isthe 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand the other is the 3768 rads (3600 rpm) case under thelumped nonlinear external disturbances with twice param-eter variations 119879119897 = 2Δ119879119901 + 119879un In order to achieve goodtransient and steady-state control performance all gains of thewell-known PI controller are 119896ps = 135 and 119896is = 119896ps119879is =18 through some heuristic knowledge [47ndash50] on the tuningof the PI controller at 1884 rads (1800 rpm) case under thelumped nonlinear external disturbances with parameter vari-ation119879119897 = Δ119879119901+119879un for the speed trackingThe experimentalresults of the well-known PI controller for the V-belt CVTsystem driven by PMSM at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice
parameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures6 7 and 8 where tracking responses of the command rotorspeed 120596lowast
119903 the desired command rotor speed 120596lowast and the
measured rotor speed 120596119903 are shown in Figures 6(a) and7(a) tracking responses of the speed error 119890 are shown inFigures 6(b) and 7(b) tracking responses of the speed error119890 amplification are shown in Figures 6(c) and 7(c) Sincethe low speed operation is the same as the nominal casedue to smaller disturbance the response of speed shown inFigure 6(a) has better tracking performance Moreover thedegenerate tracking responses of speed shown in Figure 7(a)is obvious due to bigger nonlinear disturbance (eg rollingresistance wind resistance and parameter variation) at highspeed operation From the experimental results sluggishtracking responses of speed and current are obtained forthe V-belt CVT system driven by PMSM using the well-known PI controller The linear controller has the weakrobustness under bigger nonlinear disturbance because of noappropriate gains tuning or no degenerate nonlinear effect Inaddition responses of the command electromagnetic torque119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 8(a) and 8(b) respectivelyThe dynamic response of command electromagnetic torque119879119890 results in great torque ripple due to V-belt CVT systemwith nonlinear disturbance such as V-belt shaking frictionand action frictions between primary pulley and secondpulley
The control gains of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are 120578 =01 120582 = 03 All control gains of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system arechosen to achieve the best transient control performance
Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
the sign function sgn(119861119886119890) can be replaced by the equation119861119886119890(|119861119886119890| + 120588) where
120588 = 1205880
10038161003816100381610038161198611198861198901003816100381610038161003816 lt 120591
01003816100381610038161003816119861119886119890
1003816100381610038161003816 ge 120591(29)
in which 1205880 and 120591 are positive constantsAccording to Lyapunov stability theoremand the gradient
descent method an online parameter training methodologyof the recurrent Laguerre-orthogonal-polynomial NN canbe derived and trained effectively Then the parameter ofadaptive law Θ can be computed by the gradient descentmethod The adaptive law Θ shown in (20) calls for a properchoice of the learning rate For a small value of learning ratethe convergence of controller parameter can be guaranteedbut the convergent speed is very slow In order to achieve thefast convergence of output tracking error the modified PSOis used to obtain optimal learning rate for training parametersof the recurrent Laguerre-orthogonal-polynomial NN Firstthe parameter of adaptive law Θ shown in (20) can berewritten as
2
119896119895= 1205831119909
3
119895119861119886119890 (30)
The central part of the training algorithm for the recurrentLaguerre-orthogonal-polynomial NN is concerned with howto obtain recursively a gradient vector in which each elementin the training algorithm is defined as the derivative of anenergy function with respect to a parameter of the networkThis is done by means of the chain rule because the gradientvector is calculated in the direction opposite to the flow of theoutput of each node In order to describe the online trainingalgorithm of the recurrent Laguerre-orthogonal-polynomialNN a cost function is defined as
1198811 =1198902
2 (31)
According to the gradient descent method the adaptive lawof the weight also can be represented as
2
119896119895= minus1205831
1205971198811
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1205971199103
119896
120597 nod3119896
120597 nod3119896
1205971199082119896119895
= minus12058311205971198811
1205971199103119896
1199093
119895
(32)
Comparing (30) with (32) yields 12059711988111205971199103
119896= minus119890119861119886 Then the
convergence analysis in the following theorem is to derivespecific learning rate to assure convergence of the outputtracking error
The adaptation law of recurrent weight 1199081119894119896
using thegradient descent method can be updated as
1
119894119896= minus1205832
1205971198811
120597119906re
120597119906re1205971199103119896
1205971199103
119896
1205971199102119895
1205971199102
119895
120597 nod2119895
120597 nod2119895
1205971199101119894
1205971199101
119894
120597 nod1119894
120597 nod1119894
1205971199081119894119896
= 12058321198611198861198901199082
119896119895119871119895 (sdot) 119909
1
119894(119873) 119910
3
119896(119873 minus 1)
(33)
in which 1205832 is a learning rate Then the convergence analysisin the following theorem is to derive specific learning rate
to assure convergence of the output tracking error In orderto obtain better learning rate therefore the modified PSO isproposed to search for a better learning rate of the weights ofthe recurrent Laguerre-orthogonal-polynomial NN
The PSO [30ndash42] which has three parameters as twoacceleration coefficients 1198881 1198882 and inertia weight 120574(119899) has asignificant impact on performance of the algorithm espe-cially the impact of inertia weight The impact is differenton different conditions and is also different at different timesunder the same conditionThe PSOwith larger inertia weighthas a faster convergence speed and works well in globalsearch while the PSO with smaller inertia weight can reacha more accurate optimum value but only works well in localsearch Now dynamic inertia weight modification is used totrain the appropriate value of 120574(119899) in order to coordinatebetween search accuracy and search speedThemodifiedPSOalgorithmdepends in its implementation in the following tworelations
V119895 (119899 + 1) = 120574 (119899) V119895 (119899)
+ 120572 (119899) [11988811205931 (119875119887119895 minus 120583119898119895 (119899))
+ 11988821205932 (119875119892119895 minus 120583119898119895 (119899))] 119898 = 1 2
120583119898119895 (119899 + 1) = 120583119898119895 (119899) + V119895 (119899 + 1) 119898 = 1 2
120574 (119899) = 1205740 + 1205933 (1 minus 1205740)
120572 (119899) = 1205720 +1205721119899
119879
(34)where 119899 = 1 2 119873max indicates the iterations 120583119898119895(119899) isthe current position of particle 119875119895 in hyperspace and withrespect to learning rate 120583119898(119899) 119898 = 1 2 V119895(119899) is the currentspeed of particle 119895 120574(119899) is the inertia weight with respectiveto 119899 1198881 and 1198882 are acceleration positive constants 1205931 1205932 and1205933 are random numbers obtained from a uniform randomdistribution function in the interval [0 1] 1205740 is the initialpositive constant in the interval [0 1] 1205720 and 1205721are theinitial positive constants in the interval [0 1] 119879 denotes thenumber of generations119875119887119895 and119875119892119895 represent the best previousposition of the 119895th particle and the position of the best particleamong all particles in the population respectively Usually120574(119899) is modified gradually in descending within the limit of08 lt 120574(119899) lt 14 [40] so that search space can be changedsteadily from the global to the local Decreasing inertiaweightparticle swarm optimization is a topical algorithm of whichinertia weight 120574(119899) decreases linearly from 09 to 04 [38 39]Some scholars propose the increasing inertia weight particleswarm optimization of which inertia weight 120574(119905) increaseslinearly from 04 to 09 [40 41] 120572(119899) is the constriction factorintroduced by Eberhart and Shi [38 39] to avoid the swarmfrom premature convergence and to ensure stability of thesystem
4 Experimental Results
The whole system of the DSP-based control system for thePMSM driven V-belt CVT system is shown in Figure 1 The
10 Mathematical Problems in Engineering
Start (0 rads)(0 rpm)05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
(a)
05 s
628 rads (60 rpm)
Start (0 rads)
ee
(b)
005 s
e
0 rads (0 rpm)
314 rads (30 rpm)
(c)
Figure 6 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation119879119897 = Δ119879119901+119879un (a) tracking response of command rotor speed120596lowast
119903
desired command rotor speed120596lowast andmeasured rotor speed120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890 amplification
control algorithmwas executed by a TMS320C32DSP controlsystem including four channels of DA eight channels ofprogrammable PWM and one encoder interface circuit TheIGBT power module voltage source inverter is executed bycurrent-controlled SPWM with a switching frequency of15 kHz The specification of PMSM is a three-phase 48V750W 165 A and 3600 rpm The parameters of the PMSMare given as follows as 119877119903 = 25Ω 119871119889119903 = 119871119902119903 = 653mH119869119903 = 6215 times 10
minus3Nms 119861119903 = 618 times 10minus3Nmsrad and
119896119903 = 086NmA by using open circuit test short test rotorblock test and loading test Owing to inherent uncertaintyin V-belt CVT system (eg the lumped nonlinear externaldisturbances and parameter variations) and output currentlimitation of battery capacity the PMSM can only operate at3768 rads (3600 rpm) to avoid burning IGBT modules forV-belt CVT system at high speed perturbation
To show the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem two cases are provided in the experimentation One isthe 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand the other is the 3768 rads (3600 rpm) case under thelumped nonlinear external disturbances with twice param-eter variations 119879119897 = 2Δ119879119901 + 119879un In order to achieve goodtransient and steady-state control performance all gains of thewell-known PI controller are 119896ps = 135 and 119896is = 119896ps119879is =18 through some heuristic knowledge [47ndash50] on the tuningof the PI controller at 1884 rads (1800 rpm) case under thelumped nonlinear external disturbances with parameter vari-ation119879119897 = Δ119879119901+119879un for the speed trackingThe experimentalresults of the well-known PI controller for the V-belt CVTsystem driven by PMSM at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice
parameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures6 7 and 8 where tracking responses of the command rotorspeed 120596lowast
119903 the desired command rotor speed 120596lowast and the
measured rotor speed 120596119903 are shown in Figures 6(a) and7(a) tracking responses of the speed error 119890 are shown inFigures 6(b) and 7(b) tracking responses of the speed error119890 amplification are shown in Figures 6(c) and 7(c) Sincethe low speed operation is the same as the nominal casedue to smaller disturbance the response of speed shown inFigure 6(a) has better tracking performance Moreover thedegenerate tracking responses of speed shown in Figure 7(a)is obvious due to bigger nonlinear disturbance (eg rollingresistance wind resistance and parameter variation) at highspeed operation From the experimental results sluggishtracking responses of speed and current are obtained forthe V-belt CVT system driven by PMSM using the well-known PI controller The linear controller has the weakrobustness under bigger nonlinear disturbance because of noappropriate gains tuning or no degenerate nonlinear effect Inaddition responses of the command electromagnetic torque119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 8(a) and 8(b) respectivelyThe dynamic response of command electromagnetic torque119879119890 results in great torque ripple due to V-belt CVT systemwith nonlinear disturbance such as V-belt shaking frictionand action frictions between primary pulley and secondpulley
The control gains of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are 120578 =01 120582 = 03 All control gains of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system arechosen to achieve the best transient control performance
Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
Start (0 rads)(0 rpm)05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
(a)
05 s
628 rads (60 rpm)
Start (0 rads)
ee
(b)
005 s
e
0 rads (0 rpm)
314 rads (30 rpm)
(c)
Figure 6 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation119879119897 = Δ119879119901+119879un (a) tracking response of command rotor speed120596lowast
119903
desired command rotor speed120596lowast andmeasured rotor speed120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890 amplification
control algorithmwas executed by a TMS320C32DSP controlsystem including four channels of DA eight channels ofprogrammable PWM and one encoder interface circuit TheIGBT power module voltage source inverter is executed bycurrent-controlled SPWM with a switching frequency of15 kHz The specification of PMSM is a three-phase 48V750W 165 A and 3600 rpm The parameters of the PMSMare given as follows as 119877119903 = 25Ω 119871119889119903 = 119871119902119903 = 653mH119869119903 = 6215 times 10
minus3Nms 119861119903 = 618 times 10minus3Nmsrad and
119896119903 = 086NmA by using open circuit test short test rotorblock test and loading test Owing to inherent uncertaintyin V-belt CVT system (eg the lumped nonlinear externaldisturbances and parameter variations) and output currentlimitation of battery capacity the PMSM can only operate at3768 rads (3600 rpm) to avoid burning IGBT modules forV-belt CVT system at high speed perturbation
To show the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem two cases are provided in the experimentation One isthe 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand the other is the 3768 rads (3600 rpm) case under thelumped nonlinear external disturbances with twice param-eter variations 119879119897 = 2Δ119879119901 + 119879un In order to achieve goodtransient and steady-state control performance all gains of thewell-known PI controller are 119896ps = 135 and 119896is = 119896ps119879is =18 through some heuristic knowledge [47ndash50] on the tuningof the PI controller at 1884 rads (1800 rpm) case under thelumped nonlinear external disturbances with parameter vari-ation119879119897 = Δ119879119901+119879un for the speed trackingThe experimentalresults of the well-known PI controller for the V-belt CVTsystem driven by PMSM at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice
parameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures6 7 and 8 where tracking responses of the command rotorspeed 120596lowast
119903 the desired command rotor speed 120596lowast and the
measured rotor speed 120596119903 are shown in Figures 6(a) and7(a) tracking responses of the speed error 119890 are shown inFigures 6(b) and 7(b) tracking responses of the speed error119890 amplification are shown in Figures 6(c) and 7(c) Sincethe low speed operation is the same as the nominal casedue to smaller disturbance the response of speed shown inFigure 6(a) has better tracking performance Moreover thedegenerate tracking responses of speed shown in Figure 7(a)is obvious due to bigger nonlinear disturbance (eg rollingresistance wind resistance and parameter variation) at highspeed operation From the experimental results sluggishtracking responses of speed and current are obtained forthe V-belt CVT system driven by PMSM using the well-known PI controller The linear controller has the weakrobustness under bigger nonlinear disturbance because of noappropriate gains tuning or no degenerate nonlinear effect Inaddition responses of the command electromagnetic torque119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinearexternal disturbanceswith parameter variation119879119897 = Δ119879119901+119879unand 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 8(a) and 8(b) respectivelyThe dynamic response of command electromagnetic torque119879119890 results in great torque ripple due to V-belt CVT systemwith nonlinear disturbance such as V-belt shaking frictionand action frictions between primary pulley and secondpulley
The control gains of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system are 120578 =01 120582 = 03 All control gains of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system arechosen to achieve the best transient control performance
Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
Start (0 rads)(0 rpm)05 s
7536 rads (720 rpm)
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
(a)
05 s
1256 rads (120 rpm)
Start (0 rads) (0 rpm)
ee
(b)
005 s
e
0 rads (0 rpm)
628 rads (60 rpm)
(c)
Figure 7 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) tracking response of command rotorspeed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking error 119890 (c) response of tracking error 119890
amplification
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 8 Experimental results of the PMSM driven V-belt CVT system using the well-known PI controller (a) response of electromagnetictorque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (b)response of electromagnetic torque 119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinear external disturbances with twice parametervariations 119879119897 = 2Δ119879119901 + 119879un
in experimentation considering the requirement of stabil-ity The parameter adjustment process remains continuallyactive for the duration of the experimentation The struc-ture of the recurrent Laguerre-orthogonal-polynomial NNcontroller has 2 nodes 3 nodes and 1 node in the inputlayer the hidden layer and the output layer respectivelyThe experimental results of the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system for theV-belt CVT systemdriven byPMSMat 1884 rads (1800 rpm)case under the lumped nonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un and 3768 rads(3600 rpm) case under the lumped nonlinear external distur-bances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un areshown in Figures 9 10 and 11 where tracking responses ofthe command rotor speed 120596lowast
119903 the desired command rotor
speed 120596lowast and the measured rotor speed 120596119903 are shown inFigures 9(a) and 10(a) tracking responses of the speed error119890 are shown in Figures 9(b) and 10(b) tracking responsesof the speed error 119890 amplification are shown in Figures
9(c) and 10(c) Since the low speed operation is the sameas the nominal case due to smaller disturbance the speedtracking response shown in Figure 9(a) has better trackingperformance The better speed tracking response is shownin Figure 10(a) under the occurrence of bigger lumped non-linear external disturbances and parameter variation Fromthe experimental results the accurate tracking performanceis obtained for the V-belt CVT system driven by PMSMusing the hybrid recurrent Laguerre-orthogonal-polynomialNN control system owing to the online adaptive mechanismof the recurrent Laguerre-orthogonal-polynomial NN andaction of the recouped controller In addition responsesof the command electromagnetic torque 119879119890 at 1884 rads(1800 rpm) case under the lumped nonlinear external dis-turbances with parameter variation 119879119897 = Δ119879119901 + 119879un and3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 =2Δ119879119901 + 119879un are shown in Figures 11(a) and 11(b) respectivelyIn addition in order to decrease inertiaweight particle swarm
12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
05 s
3768 rads (360 rpm)
120596lowast
120596lowastr
120596r
= 1884 rads (1800 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
628 rads (60 rpm)
Start (0 rads ) (0 rpm)
(b)
0 rads (0 rpm)
314 rads (30 rpm)
005 s
e
(c)
Figure 9 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
05 s
120596lowast
120596lowastr
120596r
= 3768 rads (3600 rpm)
628 rads (3600 rpm)
Start (0 rads ) (0 rpm)
(a)
05 s
e e
Start (0 rads ) (0 rpm)
1256 rads (120 rpm)
(b)
0 rads (0 rpm)
628 rads (60 rpm)
005 s
e
(c)
Figure 10 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system at 3768 rads (3600 rpm) under the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un(a) tracking response of command rotor speed 120596lowast
119903 desired command rotor speed 120596lowast and measured rotor speed 120596119903 (b) response of tracking
error 119890 (c) response of tracking error 119890 amplification
optimization the initial coefficient 1205740 of inertia weight is setas 04 Two initial coefficients 1205720 and 1205721 of the constrictionfactor are set as 03 to avoid the swarm from prematureconvergence and to ensure stability of the system Thusthe convergence responses of two learning rates 1205831 and1205832 of the recurrent Laguerre-orthogonal-polynomial NNusing modified PSO at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation119879119897 = Δ119879119901+119879un are shown in Figures 12(a) and 12(b)
respectivelyThe convergence responses of two learning rates1205831 and 1205832 of the recurrent Laguerre-orthogonal-polynomialNN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances withtwice parameter variations 119879119897 = 2Δ119879119901 + 119879un are shownin Figures 13(a) and 13(b) respectively The convergenceresponse of two learning rates 1205831 and 1205832 of the recur-rent Laguerre-orthogonal-polynomial NN using modifiedPSO have faster convergence speed than the fixed learning
Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
05 s
Start (0Nm)
5Nm
Te
(a)
05 s
Start (0Nm)
5NmTe
(b)
Figure 11 Experimental results of the PMSM driven V-belt CVT system using the hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system (a) response of electromagnetic torque 119879119890 at 1884 rads (1800 rpm) case under the lumped nonlinear external disturbanceswith parameter variation119879119897 = Δ119879119901+119879un (b) response of electromagnetic torque119879119890 at 3768 rads (3600 rpm) case under the lumped nonlinearexternal disturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 12 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 1884 rads (1800 rpm) caseunder the lumped nonlinear external disturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) the convergence response of learning rates1205831 (b) the convergence response of learning rates 1205832
Start (0)
1
05 s
1205831
(a)
05 s
1205832
Start (0)
1
(b)
Figure 13 Experimental results of the recurrent Laguerre-orthogonal-polynomial NN using modified PSO at 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twice parameter variations 119879119897 = 2Δ119879119901 +119879un (a) the convergence response of learningrates 1205831 (b) the convergence response of learning rates 1205832
rate of the recurrent Laguerre-orthogonal-polynomial NNThe dynamic response of command electromagnetic torque119879119890 results lower torque ripple by on-line adjusted of therecurrent Laguerre-orthogonal-polynomial NN to cope withthe high-frequency unmodeled dynamic of the V-belt CVTsystem with nonlinear disturbance such as V-belt shakingfriction and action frictions between primary pulley andsecond pulley Therefore these results show that the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem has better control performance than the well-known PIcontroller under high speed perturbation for the V-belt CVTsystem driven by PMSM Moreover the numerical results ofthe iteration performance for two learning rates 1205831 and 1205832by means of modified PSO method from 0 s to 06 s with
240 iterations (runs) at 1884 rads (1800 rpm) case underthe lumped nonlinear external disturbances with parametervariation 119879119897 = Δ119879119901 + 119879un and 3768 rads (3600 rpm) caseunder the lumped nonlinear external disturbances with twiceparameter variations 119879119897 = 2Δ119879119901 + 119879un are shown in Figures14 and 15 respectively In all cases the numerical resultsof the iteration performance show that modified PSO canreach the global optimum effectively and avoid prematureconvergence in less than 100 iterations From above it can beeasily observed that the proposed modified PSO can provideamore accurate optimal solution and converges to the criteriawith a greater probability
The measured rotor speed responses due to step distur-bance torque are given finally The condition under 119879119897 =
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
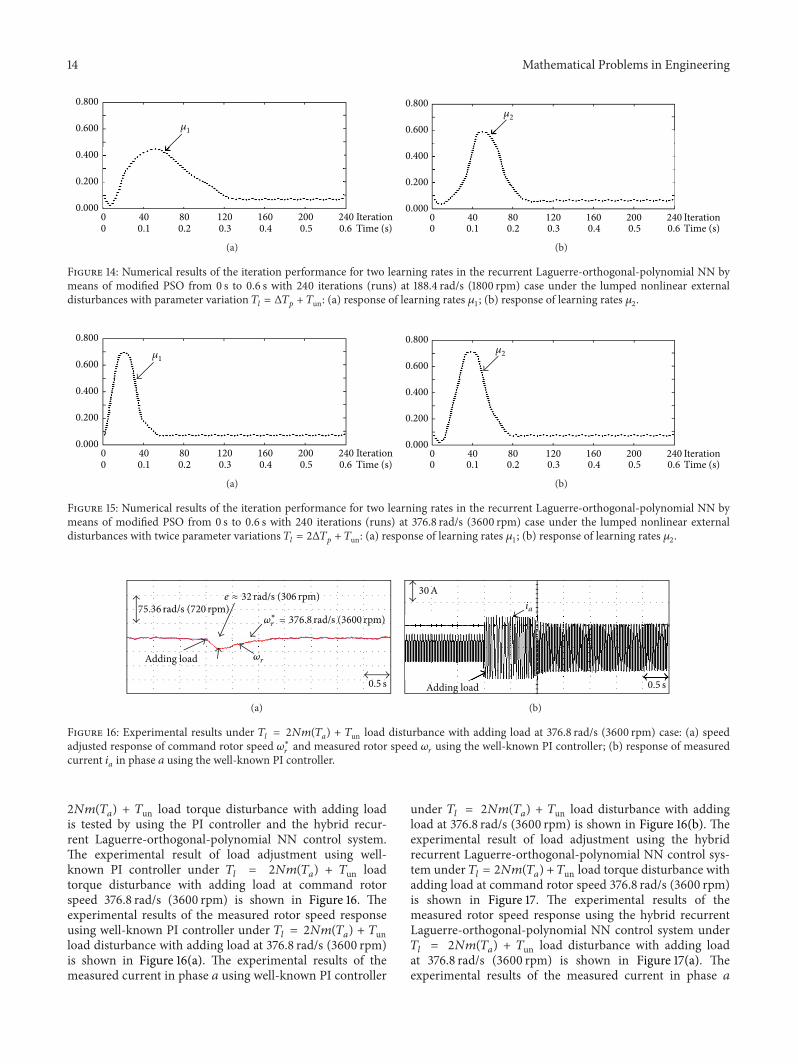
14 Mathematical Problems in Engineering
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 14 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 1884 rads (1800 rpm) case under the lumped nonlinear externaldisturbances with parameter variation 119879119897 = Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration2400 01 02 03 04 05 06 Time (s)
1205831
(a)
0200
0400
0600
0800
00000 40 80 120 160 200 Iteration 2400 01 02 03 04 05 06 Time (s)
1205832
(b)
Figure 15 Numerical results of the iteration performance for two learning rates in the recurrent Laguerre-orthogonal-polynomial NN bymeans of modified PSO from 0 s to 06 s with 240 iterations (runs) at 3768 rads (3600 rpm) case under the lumped nonlinear externaldisturbances with twice parameter variations 119879119897 = 2Δ119879119901 + 119879un (a) response of learning rates 1205831 (b) response of learning rates 1205832
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 32 rads (306 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 16 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the well-known PI controller (b) response of measured
current 119894119886 in phase 119886 using the well-known PI controller
2119873119898(119879119886) + 119879un load torque disturbance with adding loadis tested by using the PI controller and the hybrid recur-rent Laguerre-orthogonal-polynomial NN control systemThe experimental result of load adjustment using well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879un loadtorque disturbance with adding load at command rotorspeed 3768 rads (3600 rpm) is shown in Figure 16 Theexperimental results of the measured rotor speed responseusing well-known PI controller under 119879119897 = 2119873119898(119879119886) + 119879unload disturbance with adding load at 3768 rads (3600 rpm)is shown in Figure 16(a) The experimental results of themeasured current in phase 119886 using well-known PI controller
under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with addingload at 3768 rads (3600 rpm) is shown in Figure 16(b) Theexperimental result of load adjustment using the hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem under 119879119897 = 2119873119898(119879119886) + 119879un load torque disturbance withadding load at command rotor speed 3768 rads (3600 rpm)is shown in Figure 17 The experimental results of themeasured rotor speed response using the hybrid recurrentLaguerre-orthogonal-polynomial NN control system under119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding loadat 3768 rads (3600 rpm) is shown in Figure 17(a) Theexperimental results of the measured current in phase 119886
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
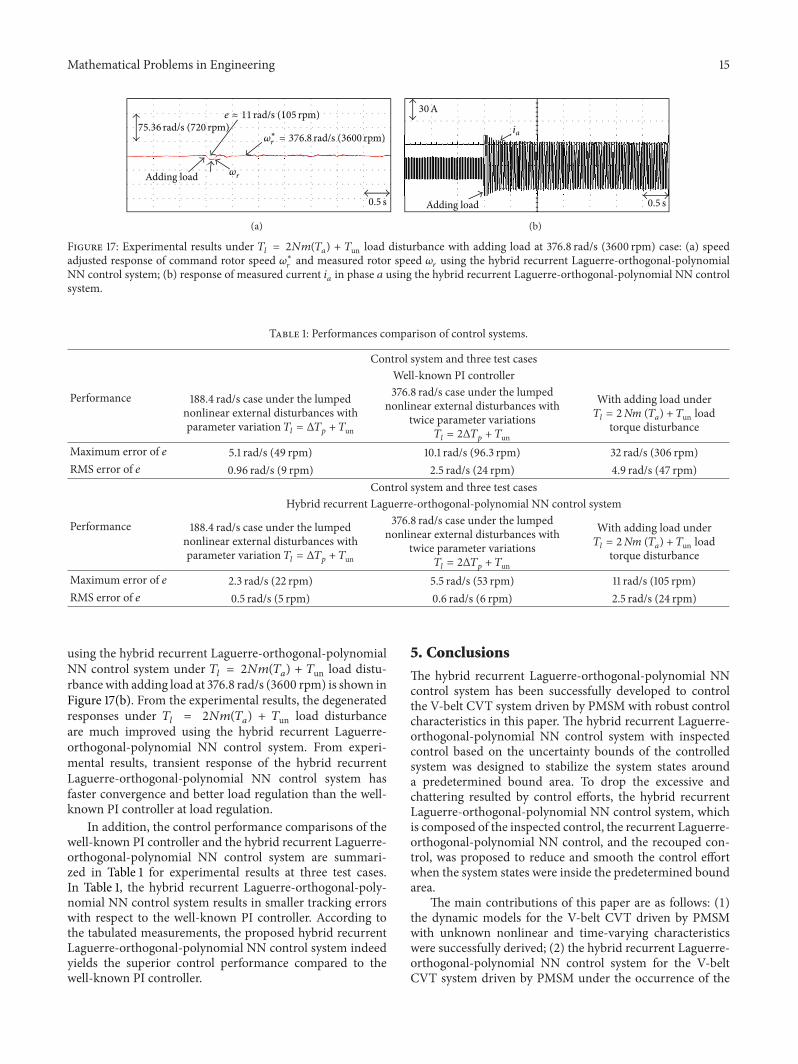
Mathematical Problems in Engineering 15
Adding load
05 s
120596r
120596lowastr = 3768 rads (3600 rpm)7536 rads (720 rpm)
e asymp 11 rads (105 rpm)
(a)
Adding load
30A
05 s
ia
(b)
Figure 17 Experimental results under 119879119897 = 2119873119898(119879119886) + 119879un load disturbance with adding load at 3768 rads (3600 rpm) case (a) speedadjusted response of command rotor speed 120596lowast
119903and measured rotor speed 120596119903 using the hybrid recurrent Laguerre-orthogonal-polynomial
NN control system (b) response of measured current 119894119886 in phase 119886 using the hybrid recurrent Laguerre-orthogonal-polynomial NN controlsystem
Table 1 Performances comparison of control systems
Performance
Control system and three test casesWell-known PI controller
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 51 rads (49 rpm) 101 rads (963 rpm) 32 rads (306 rpm)RMS error of 119890 096 rads (9 rpm) 25 rads (24 rpm) 49 rads (47 rpm)
Performance
Control system and three test casesHybrid recurrent Laguerre-orthogonal-polynomial NN control system
1884 rads case under the lumpednonlinear external disturbances withparameter variation 119879119897 = Δ119879119901 + 119879un
3768 rads case under the lumpednonlinear external disturbances with
twice parameter variations119879119897 = 2Δ119879119901 + 119879un
With adding load under119879119897 = 2Nm (119879119886) + 119879un load
torque disturbance
Maximum error of 119890 23 rads (22 rpm) 55 rads (53 rpm) 11 rads (105 rpm)RMS error of 119890 05 rads (5 rpm) 06 rads (6 rpm) 25 rads (24 rpm)
using the hybrid recurrent Laguerre-orthogonal-polynomialNN control system under 119879119897 = 2119873119898(119879119886) + 119879un load distu-rbancewith adding load at 3768 rads (3600 rpm) is shown inFigure 17(b) From the experimental results the degeneratedresponses under 119879119897 = 2119873119898(119879119886) + 119879un load disturbanceare much improved using the hybrid recurrent Laguerre-orthogonal-polynomial NN control system From experi-mental results transient response of the hybrid recurrentLaguerre-orthogonal-polynomial NN control system hasfaster convergence and better load regulation than the well-known PI controller at load regulation
In addition the control performance comparisons of thewell-known PI controller and the hybrid recurrent Laguerre-orthogonal-polynomial NN control system are summari-zed in Table 1 for experimental results at three test casesIn Table 1 the hybrid recurrent Laguerre-orthogonal-poly-nomial NN control system results in smaller tracking errorswith respect to the well-known PI controller According tothe tabulated measurements the proposed hybrid recurrentLaguerre-orthogonal-polynomial NN control system indeedyields the superior control performance compared to thewell-known PI controller
5 Conclusions
The hybrid recurrent Laguerre-orthogonal-polynomial NNcontrol system has been successfully developed to controlthe V-belt CVT system driven by PMSM with robust controlcharacteristics in this paper The hybrid recurrent Laguerre-orthogonal-polynomial NN control system with inspectedcontrol based on the uncertainty bounds of the controlledsystem was designed to stabilize the system states arounda predetermined bound area To drop the excessive andchattering resulted by control efforts the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichis composed of the inspected control the recurrent Laguerre-orthogonal-polynomial NN control and the recouped con-trol was proposed to reduce and smooth the control effortwhen the system states were inside the predetermined boundarea
The main contributions of this paper are as follows (1)the dynamic models for the V-belt CVT driven by PMSMwith unknown nonlinear and time-varying characteristicswere successfully derived (2) the hybrid recurrent Laguerre-orthogonal-polynomial NN control system for the V-beltCVT system driven by PMSM under the occurrence of the
16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

16 Mathematical Problems in Engineering
lumped nonlinear load disturbances was successfully appliedto enhance robustness (3) the adaptive law of online parame-ters tuning in the recurrent Laguerre-orthogonal-polynomialNN and the estimation law of the recouped controllerby using the Lyapunov stability theorem was successfullyderived (4) two optimal learning rates of connective weightsand recurrent weights in the recurrent Laguerre-orthogonal-polynomial NN by means of modified PSO are successfullyapplied to speed up convergence (5) the hybrid recurrentLaguerre-orthogonal-polynomial NN control system whichhas better online learning capability in order to fast capturethe systemrsquos nonlinear and time-varying behaviors is success-fully developed (6) the proposed hybrid recurrent Laguerre-orthogonal-polynomial NN control system has lower torqueripple than the well-known PI controller
Finally the control performance of the proposed hybridrecurrent Laguerre-orthogonal-polynomial NN control sys-tem is more suitable than the well-known PI controller forthe V-belt CVT system driven by PMSM
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
The author would like to acknowledge the financial supportof theMinistry of Science andTechnology inTaiwan throughits Grant MOST 103-2221-E-239-016
References
[1] C Y Tseng LW Chen Y T Lin and J Y Li ldquoA hybrid dynamicsimulation model for urban scooters with a mechanical-typeCVTrdquo in Proceedings of the IEEE International Conference onAutomation and Logistics (ICAL rsquo08) pp 515ndash519 QingdaoChina September 2008
[2] C Y Tseng Y F Lue Y T Lin J C Siao C H Tsai and L MFu ldquoDynamic simulationmodel for hybrid electric scootersrdquo inProceedings of the IEEE International Symposium on IndustrialElectronics (ISIE rsquo09) pp 1464ndash1469 Seoul Republic of KoreaJuly 2009
[3] L Guzzella andAM Schmid ldquoFeedback linearization of spark-ignition engines with continuously variable transmissionsrdquoIEEE Transactions on Control Systems Technology vol 3 no 1pp 54ndash58 1995
[4] W Kim and G Vachtsevanos ldquoFuzzy logic ratio control for aCVThydraulicmodulerdquo inProceedings of the IEEE InternationalSymposium on Intelligent Control pp 151ndash156 Rio Greece
[5] G Carbone LMangialardi B Bonsen C Tursi and P A Veen-huizen ldquoCVT dynamics theory and experimentsrdquo Mechanismand Machine Theory vol 42 no 4 pp 409ndash428 2007
[6] H Sattler ldquoEfficiency of metal chain and V-belt CVTrdquo inProceedings of the International Conference on ContinuouslyVariable Power Transmissions pp 99ndash104 Eindhoven TheNetherlands 1999
[7] G Carbone L Mangialardi and G Mantriota ldquoThe influenceof pulley deformations on the shifting mechanism of metal belt
CVTrdquo Journal of Mechanical Design vol 127 no 1 pp 103ndash1132005
[8] N Srivastava and I Haque ldquoA review on belt and chain con-tinuously variable transmissions (CVT) dynamics and controlrdquoMechanism and Machine Theory vol 44 no 1 pp 19ndash41 2009
[9] D W Novotny and T A Lipo Vector Control and Dynamics ofAC Drives Oxford University Press New York NY USA 1996
[10] R Krishnan Electric Motor Drives Modeling Analysis andControl Prentice Hall Upper Saddle River NJ USA 2001
[11] F J Lin ldquoReal-time IP position controller design with torquefeedforward control for pm synchronousmotorrdquo IEEE Transac-tions on Industrial Electronics vol 44 no 3 pp 398ndash407 1997
[12] K S Narendra andK Parthasarathy ldquoIdentification and controlof dynamical systems using neural networksrdquo IEEE Transac-tions on Neural Networks vol 1 no 1 pp 4ndash27 1990
[13] P S Sastry G Santharam and K P Unnikrishnan ldquoMemoryneuron networks for identification and control of dynamicalsystemsrdquo IEEE Transactions on Neural Networks vol 5 no 2pp 306ndash319 1994
[14] R Grino G Cembrano and C Torras ldquoNonlinear system ide-ntification using additive dynamic neural networksmdashtwo on-line approachesrdquo IEEE Transactions on Circuits and Systems Ivol 47 no 2 pp 150ndash165 2000
[15] Y Li ldquoStability of almost periodic solution for a general classof discontinuous neural networks with mixed time-varyingdelaysrdquoMathematical Problems in Engineering vol 2013 ArticleID 236189 12 pages 2013
[16] W Dong X Liu and Y Li ldquoAnalysis of stiffened penstockexternal pressure stability based on immune algorithm andneural networkrdquo Mathematical Problems in Engineering vol2014 Article ID 823653 11 pages 2014
[17] Y Pao Adaptive Pattern Recognition and Neural NetworksAddison-Wesley Boston Mass USA 1989
[18] Y H Pao and S M Phillips ldquoThe functional link net andlearning optimal controlrdquoNeurocomputing vol 9 no 2 pp 149ndash164 1995
[19] J C Patra R N Pal B N Chatterji and G Panda ldquoIden-tification of nonlinear dynamic systems using functional linkartificial neural networksrdquo IEEE Transactions on Systems Manand Cybernetics B Cybernetics vol 29 no 2 pp 254ndash262 1999
[20] P Aadaleesan N Miglan R Sharma and P Saha ldquoNonlinearsystem identification using Wiener type Laguerre-Wavelet net-work modelrdquo Chemical Engineering Science vol 63 no 15 pp3932ndash3941 2008
[21] SMahmoodi J PoshtanM R Jahed-Motlagh and AMontaz-eri ldquoNonlinear model predictive control of a pH neutralizationprocess based on Wiener-Laguerre modelrdquo Chemical Engineer-ing Journal vol 146 no 3 pp 328ndash337 2009
[22] A Zou and X Xiao ldquoAn asynchronous encryption arithmeticbased on Laguerre chaotic neural networksrdquo in Proceedings ofthe WRI Global Congress on Intelligent Systems (GCIS rsquo09) pp36ndash39 Xiamen China May 2009
[23] J C Patra C Bornand and P K Meher ldquoLaguerre neuralnetwork-based smart sensors for wireless sensor networksrdquoin Proceeding of the IEEE Intrumentation and MeasurementTechnology Conference (I2MTC 09) pp 832ndash837 SingaporeMay 2009
[24] J C Patra P K Meher and G Chakraborty ldquoDevelopment oflaguerre neural-network-based intelligent sensors for wirelesssensor networksrdquo IEEE Transactions on Instrumentation andMeasurement vol 60 no 3 pp 725ndash734 2011
Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 17
[25] T W S Chow and Y Fang ldquoA recurrent neural-network-basedreal-time learning control strategy applying to nonlinear sys-tems with unknown dynamicsrdquo IEEE Transactions on IndustrialElectronics vol 45 no 1 pp 151ndash161 1998
[26] M A Brdys andG J Kulawski ldquoDynamic neural controllers forinduction motorrdquo IEEE Transactions on Neural Networks vol10 no 2 pp 340ndash355 1999
[27] X D Li J K L Ho and T W S Chow ldquoApproximation ofdynamical time-variant systems by continuous-time recurrentneural networksrdquo IEEE Transactions on Circuits and Systems IIExpress Briefs vol 52 no 10 pp 656ndash660 2005
[28] C H Lu and C C Tsai ldquoAdaptive predictive control withrecurrent neural network for industrial processes an applica-tion to temperature control of a variable-frequency oil-coolingmachinerdquo IEEE Transactions on Industrial Electronics vol 55no 3 pp 1366ndash1375 2008
[29] C F Hsu ldquoIntelligent position tracking control for LCM driveusing stable online self-constructing recurrent neural networkcontroller with bound architecturerdquo Control Engineering Prac-tice vol 17 no 6 pp 714ndash722 2009
[30] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 Perth Australia December1995
[31] D E Goldberg The Design of Innovation Lessons from andfor Competent Genetic Algorithms Norwell Kluwer AcademicPublishers Boston Mass USA 2002
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] A B de Carvalho A Pozo and S R Vergilio ldquoA symbolicfault-prediction model based on multiobjective particle swarmoptimizationrdquo Journal of Systems and Software vol 83 no 5 pp868ndash882 2010
[34] Q Li W Chen Y Wang S Liu and J Jia ldquoParameteridentification for PEM fuel-cell mechanism model based oneffective informed adaptive particle swarm optimizationrdquo IEEETransactions on Industrial Electronics vol 58 no 6 pp 2410ndash2419 2011
[35] C T Cheng S L Liao Z T Tang andM Y Zhao ldquoComparisonof particle swarm optimization and dynamic programming forlarge scale hydro unit load dispatchrdquo Energy Conversion andManagement vol 50 no 12 pp 3007ndash3014 2009
[36] Y X Liao J H She and M Wu ldquoIntegrated hybrid-PSOand fuzzy-NN decoupling control for temperature of reheatingfurnacerdquo IEEETransactions on Industrial Electronics vol 56 no7 pp 2704ndash2714 2009
[37] E Zitzler K Deb and LThiele ldquoComparison of multiobjectiveevolutionary algorithms empirical resultsrdquo Evolutionary Com-putation vol 8 no 2 pp 173ndash195 2000
[38] R C Eberhart and Y Shi ldquoComparison between geneticalgorithms and particle swarm optimizationrdquo in Proceedings ofthe 7th International Conference Evolutionary Programming pp611ndash616 San Diego Calif USA 1998
[39] R C Eberhart and Y Shi ldquoComparing inertia weights and con-striction factors in particle swarm optimizationrdquo in Proceedingsof the Congress on Evolutionary Computation (CEC rsquo00) pp 84ndash88 La Jolla Calif USA July 2000
[40] H Gao and W Xu ldquoA new particle swarm algorithm andits globally convergent modificationsrdquo IEEE Transactions on
Systems Man and Cybernetics B Cybernetics vol 41 no 5 pp1334ndash1351 2011
[41] T Y Sun C C Liu S J Tsai S T Hsieh and K Y Li ldquoClusterguide particle swarm optimization (CGPSO) for underdeter-mined blind source separation with advanced conditionsrdquo IEEETransactions on Evolutionary Computation vol 15 no 6 pp798ndash811 2011
[42] Y Zhang X Xiong and Q Zhang ldquoAn improved self-adaptive PSOalgorithmwith detection function formultimodalfunction optimization problemsrdquo Mathematical Problems inEngineering vol 2013 Article ID 716952 8 pages 2013
[43] C H Lin P H Chiang C S Tseng Y L Liu and M Y LeeldquoHybrid recurrent fuzzy neural network control for permanentmagnet synchronous motor applied in electric scooterrdquo inProceeding of the International Power Electronics Conference pp1371ndash1376 Sapporo Japan June 2010
[44] C H Lin and C P Lin ldquoThe hybrid RFNN control for a PMSMdrive electric scooter using rotor flux estimatorrdquo InternationalJournal of Electrical Power and Energy Systems vol 51 pp 213ndash223 2013
[45] C H Lin ldquoHybrid recurrent wavelet neural network controlof PMSM servo-drive system for electric scooterrdquo InternationalJournal of Control Automation and Systems vol 12 no 1 pp177ndash187 2014
[46] C H Lin ldquoNovel adaptive recurrent Legendre neural networkcontrol for PMSM servo-drive electric scooterrdquo ASME-Journalof Dynamic Systems Measurement and Control vol 137 no 1 12pages 2015
[47] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[48] K J Astrom and T Hagglund PID Controller Theory Designand Tuning Instrument Society of America Research TrianglePark Raleigh NC USA 1995
[49] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI controlrdquo Asian Journal of Control vol 4 no4 pp 364ndash380 2002
[50] T Hagglund and K J Astrom ldquoRevisiting the Ziegler-Nicholstuning rules for PI control Part II The frequency responsemethodrdquo Asian Journal of Control vol 6 no 4 pp 469ndash4822004
[51] J J E Slotine and W Li Applied Nonlinear Control PrenticeHall Englewood Cliffs NJ USA 1991
[52] K J Astrom and B Wittenmark Adaptive Control Addison-Wesley New York NY USA 1995
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of