research article fault tolerance automotive air-ratio...
TRANSCRIPT
Research ArticleFault Tolerance Automotive Air-Ratio Control Using ExtremeLearning Machine Model Predictive Controller
Pak Kin Wong1 Hang Cheong Wong1 Chi Man Vong2 Tong Meng Iong1
Ka In Wong1 and Xianghui Gao1
1Department of Electromechanical Engineering University of Macau Macau2Department of Computer and Information Science University of Macau Macau
Correspondence should be addressed to Pak Kin Wong fstpkwumacmo
Received 7 August 2014 Revised 27 September 2014 Accepted 28 September 2014
Academic Editor Jiuwen Cao
Copyright copy 2015 Pak Kin Wong et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Effective air-ratio control is desirable to maintain the best engine performance However traditional air-ratio control assumes thelambda sensor located at the tail pipe works properly and relies strongly on the air-ratio feedback signal measured by the lambdasensor When the sensor is warming up during cold start or under failure the traditional air-ratio control no longer works Toaddress this issue this paper utilizes an advanced modelling technique kernel extreme learning machine (ELM) to build a backupair-ratio model With the prediction from the model a limited air-ratio control performance can be maintained even when thelambda sensor does not work Such strategy is realized as fault tolerance control In order to verify the effectiveness of the proposedfault tolerance air-ratio control strategy a model predictive control scheme is constructed based on the kernel ELM backup air-ratio model and implemented on a real engine Experimental results show that the proposed controller can regulate the air-ratio tospecific target values within a satisfactory tolerance under external disturbance and the absence of air-ratio feedback signal from thelambda sensor This implies that the proposed fault tolerance air-ratio control is a promising scheme to maintain air-ratio controlperformance when the lambda sensor is under failure or warming up
1 Introduction
Vehicular emissions are the major source of gaseous pollu-tants that contribute to the harmful and negative effects onenvironment and human health It has been reported in [1ndash4]that the increasing amount of vehicular emissions has led tohundred thousands of mortalities and billions of economicloss every year To reduce the amount of toxic elementsin vehicular emissions three-way catalytic converter is cur-rently the most effective after-treatment device This devicereduces the unburned hydrocarbons and carbon monoxideby oxidization and nitrogen oxides by reduction [5]The con-version efficiency of the catalytic converter however dependshighly on the air-ratio (also known as lambda)When the air-ratio is at the stoichiometric value (ie air-ratio = 10) theconversion efficiency can reach as high as 98 but derivationof only 1 from stoichiometry can already result in 50degradation on the converter Therefore for environmentalpurpose the air-ratio is usually regulated to 1 Meanwhile
as an important engine parameter the air-ratio should alsobe controlled to different values for other situations [6] Forinstance if emissions are not concerned the air-ratio can beregulated to around 095 to achieve the best engine powerperformance whilst it is 105 to achieve the best brake-specificfuel consumption Consequently an effective air-ratio controlsystem is necessary for engine system to maintain its bestperformance under various operating conditions
Over the past decades car manufacturers and researchershave developed many air-ratio control strategies [7ndash12]Examples include the sliding mode control [7 8] pro-portional-integral-derivative (PID) control [9] and neural-network-based model predictive control (MPC) [10ndash12]Sliding mode control requires a very accurate mathematicaldefinition of the engine model but in general it is impossibleto derive an exact engine dynamics model due to its highlynonlinear nature [13] In most sliding mode air-ratio controlstudies many assumptions have been made in the modelderivation and many coefficients are difficult to determine
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 317142 10 pageshttpdxdoiorg1011552015317142
2 Mathematical Problems in Engineering
for a real engine so this strategy may not be suitable forpractical use Although PID control is the most widely usedapproach in practice the calibration and tuning of the controlparameters are very time-consuming and engine dependentThe tuned PID controller cannot deal with steady distur-bance or any change in the engine conditions either Thusamong these researches the most appropriate and promisingtechnique for air-ratio control is the neural-network-basedMPC due to its robustness to multivariable time-varyingand delay systems like modern engine systems [12] It is well-known that a reliable predictionmodel is the core componentof the MPC but the engine models developed in [10 11]were only surrogate models That is the models were trainedfrom the data generated by empirical equations rather thana real engine Therefore similar to the deficiency of slid-ing mode control approach the neural-network predictionmodels in [10 11] derived from data generated by empiricalequations cannot effectively reflect the actual performanceof real engines In the most recent study of MPC air-control strategy [12] the prediction model for the controllerwas constructed based on experimental data rather thannumerical data Experimental results in [12] showed that thecontroller performance is superior to those of [10 11] in realapplication Nevertheless one major concern for the controlstrategy in [12] is that the prediction model must rely on thereal-time air-ratio signal measured from the lambda sensorlocated at the exhaust pipe of the engine When the sensor isunder failure or warming up during cold start the controllerbecomes ineffective resulting in poor control performance
In fact for most of the current available air-ratio controlapproaches the air-ratio measurement must be acquiredas the feedback to the controllers Hence the problem oflambda sensor failuremust be addressed Although on-boarddiagnostics for the lambda sensor has been a requirementfor more than two decades [14] and any fault of the lambdasensor must be reflected through the ldquocheck enginerdquo light onthe instrument panel the driver may not be aware of suchfault and may not be willing to replace the lambda sensorwhen the car can still be driven without significant defectIn that case the emissions and fuel consumption of that carare already significantly deteriorated Therefore maintaininga satisfactory air-ratio control performance when the lambdasensor is under failure or warming up during cold startis of great significance This paper proposes to build asupplementary air-ratio model to compensate the lambdasensor in which the measured air-ratio signal is not requiredas the model input
From the open literature [15 16] it is possible to predictthe air-ratio without using the previous air-ratio signal Forinstance Gassenfeit and Powell [15] compared two algo-rithms that can predict the air-ratio from either the cylinderpressure time history patterns or the ratio of the cylinderpressure before and after combustion Another example isthe method described by Asik et al [16] in which the air-ratio can be roughly estimated from induced crankshaft speedfluctuations However the quantities used in these algo-rithms say the in-cylinder pressure and delicate crankshaftspeed fluctuation are usually unavailable in normal vehicleengines because expensive sensors are required Moreover
as mentioned empirical equations may not be suitable forreal applications Thus by following the framework in [12]this study attempts to construct the air-ratio model fromexperimental data Extreme learning machine (ELM) [17]is currently a popular and effective algorithm for trainingmodel from sample data Many recent studies [18 19] alreadyshowed that ELM is superior to other famous methods suchas neural-networks least squares support vector machinesand relevance vector machine in terms of generaliza-tion performance and computational load ELM has beenemployed for various practical applications too [20 21]ThusELM is selected in this study to develop the supplementaryair-ratio model
Among so many variants of ELM kernel-based ELM isadopted in this study to build the model It is because inkernel ELM the random feature mapping is replaced witha kernel function so randomness does not occur and thechance of result variations could be reduced [22] In fact themodel built in [12] was based on an online variant of ELMwhose backbone is simply a basic ELM (ie the model is stillan ELM with random feature mapping but can be updatedwhen online data is provided)The reason why offline versionof ELM is used in this paper instead of the online one is thatthe real-time data of air-ratio will not be available when thelambda sensor is malfunctioning As both the air-ratiomodelfrom [12] and the proposed air-ratiomodel aremade from thesame basis (kernel ELM) a fair comparison can be made toevaluate their performances
In order to verify the effectiveness of the ELM supple-mentary air-ratio model this paper also proposes a non-linear MPC algorithm for air-ratio control which utilizesa switch to toggle between the lambda sensor signals andthe ELM supplementary air-ratio model predictions Whenthe lambda sensor works well the air-ratio measurementwill be used when the lambda sensor is under failure thebackup air-ratio model will be used The MPC under suchstrategy is called fault tolerance controller (FTC) which is anovel nontrivial application of ELM Based on the multiple-step-ahead air-ratio predictions a control signal is obtainedto regulate the air-ratio to trace the desired values Theproposed FTC is also comparedwith the typical air-ratio con-trol techniques including online sequential extreme learningmachine model predictive controller (OEMPC) [12] diag-onal recurrent neural-network model predictive controller(DNMPC) [10] and traditional open-loop air-ratio controlsystem to evaluate its performance The concept of kernel-based ELM is provided in Section 2 The construction andevaluation of the ELM supplementary air-ratio model aregiven in Section 3 The detail of the FTC design is presentedin Section 4 Experimental implementation and evaluation ofthe proposed FTC and OEMPC are provided in Section 5
2 Kernel-Based Extreme Learning Machine
Kernel-based ELM is a learning scheme for single-hidden-layer feedforward network with the use of kernel [17]Considering a set of 119873 training samples D = (x
119894 119905119894) 119894 =
1 119873 with each x119894being a 119889 dimensional input vector
Mathematical Problems in Engineering 3
and 119905119894as the target scalar output a single-hidden-layer
feedforward network with 119871 hidden nodes can be written as
119871
sum
119896=1
120573119896ℎ119896(x119894) = h (x
119894)120573 = 119905
119894 119894 = 1 119873 (1)
where h(x119894) = [ℎ1(x119894) ℎ119871(x119894)] is the feature mapping out-
put with respect to x119894and 120573 = [1205731 120573119871]
119879 is the outputweight vector In kernel-based ELM this weight vector isdetermined by minimizing both the norm of the weight vec-tor and the training error The corresponding optimizationproblem is
Minimize 1210038171003817100381710038171205731003817100381710038171003817
2+ 119862
12
119873
sum
119894=1
10038171003817100381710038171205791198941003817100381710038171003817
2
Subject to 120579119894= 119905119894minus h (x
119894)120573 119894 = 1 119873
(2)
where 119862 is a user-specified penalty term for regularizationpurpose
Then based on the Karush-Kuhn-Tucker theorem opti-mizing (2) is equal to solving the following dual optimizationproblem
LELM =1210038171003817100381710038171205731003817100381710038171003817
2+ 119862
12
119873
sum
119894=1
10038171003817100381710038171205791198941003817100381710038171003817
2
minus
119873
sum
119894=1120572119894(h (x119894)120573 minus 119905
119894+ 120579119894)
(3)
where 120572119894is the Lagrange multiplier
By taking derivatives on (3) the following conditions areobtained
120597LELM120597120573
= 0 997888rarr 120573 =119873
sum
119894=1120572119894h (x119894)119879997888rarr 120573 = H119879120572
120597LELM120597120579119894
= 0 997888rarr 120572119894= 119862120579119894 119894 = 1 119873
120597LELM120597120572119894
= 0 997888rarr h (x119894)120573 minus 119905
119894+ 120579119894= 0 119894 = 1 119873
(4)
where
120572 = [1205721 120572119873]119879 H = [[
[
ℎ1 (x1) sdot sdot sdot ℎ119871(x1)
d
ℎ1 (x119873) sdot sdot sdot ℎ119871 (x119873)
]]
]119873times119871
(5)
By combining the conditions in (4) and eliminating theLagrange multipliers 120572
119894 the optimal weight vector could be
calculated as
120573 = H119879( I119862+HH119879)
minus1T (6)
where T = [1199051 119905119873]119879 and I is the identity matrix
With (6) the output function of the network for anunknown input X becomes
119891 (X) = h (X)H119879( I119862+HH119879)
minus1T (7)
Finally by defining a kernel matrix satisfying Mercerrsquosconditions as
ΩELM = HH119879 ΩELM119886119887 = ℎ (x119886) sdot ℎ (x119887)
= 119870 (x119886 x119887)
(8)
(7) becomes
119891 (X) = [[[
119870 (X x1)
119870 (X x119873)
]]
]
119879
(I119862+ΩELM)
minus1
T (9)
In this study the function 119891(X) is the supplementary air-ratio model
3 Supplementary Air-Ratio Model
31 Model Construction The objective of the ELM supple-mentary air-ratio model is to predict the future air-ratio119910119901when the lambda sensor is under failure or during cold
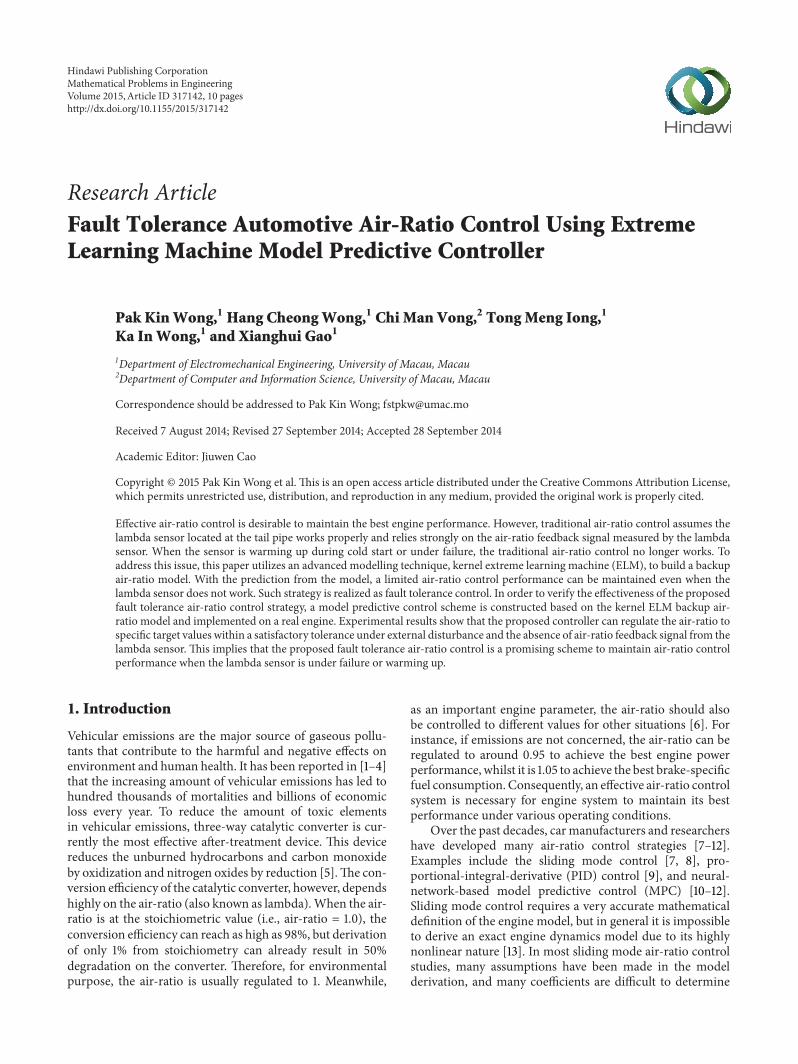
start Previous air-ratio measurementmust not be used as theinputs to the model Three engine parameters related closelyto the air-ratio performance were carefully selected as themodel inputs fuel injection time (FI) engine speed (ES) andthrottle position (TP) The order of the system dynamics waschosen to be 2 (ie second-order system with 2 past timesteps) which gives the minimum prediction error [12] Thestructure of the supplementary air-ratio model is shown inFigure 1
To build the supplementary air-ratiomodel experimentalengine data was used rather than empirical equation dataA Honda DC5 Type-R test car with K20A i-VTEC enginewas employed to perform the experiment A MoTeC M800programmable electronic control unit (ECU) with factorycalibration data was used as a base controller to control theengine The car was run over a dyno test and totally 5800data samples were acquired using a wide-band lambda sensorsubject to random throttle positions The first 3000 datasamples were used as the training dataset D to build thesupplementary air-ratio model The last 2800 data sampleswere used as the test dataset Dt to evaluate the generaliza-tion of the built supplementary air-ratio model After train-ing the output function of the ELM supplementary modelfor an unseen case can be written in the following form
119910119901=[[
[
119870 (X x1)
119870 (X x119873)
]]
]
119879
(I119862+ΩELM)
minus1
T (10)
where xT isin D are the training data 119910119901is the prediction
output vector X is the unseen input vector 119870(x119886 x119887) =
exp(minusx119886minus x119887221205902) is the selected radial basis function
4 Mathematical Problems in Engineering
Supplementary air-ratio model
FI (t minus 2)
FI (t minus 1)
ES (t minus 2)
ES (t minus 1)
TP (t minus 2)
TP (t minus 1)
yp (t)
Figure 1 Structure of the ELM supplementary air-ratio model
Table 1 Accuracy of different air-ratio models
Air-ratio model LMAESupplementary air-ratio model 18559Air-ratio model obtained from [12] 22424
kernel I is the identity matrix and 119862 is the user-specifiedpenalty term The hyperparameters of 1205902 and 119862 in thekernel-based ELM were tuned by using the hybrid inferenceintroduced in [18] which combined leave-one-out crossvalidation and Bayesian inference The details can be foundin [18]
32 Evaluation of Engine Air-Ratio Model To evaluate theproposed ELM supplementary air-ratio model its predictionresult was compared with the air-ratio model obtained from[12] which is a time-series model with the air-ratio historiesas the input The performance of the models is evaluated interms of prediction accuracy for unseen case from Dt Theprediction results of the two air-ratio models over Dt areshown in Figure 2
From Figure 2 it can be seen that both models achievecomparative performance To further evaluate the predictionaccuracy the logarithmic mean absolute error (LMAE) forthe prediction of each model is determined using the follow-ing equation
LMAE = minus log[ 1119879
119879
sum
119896=1
10038161003816100381610038161003816119910119896minus 119910119901
10038161003816100381610038161003816] (11)
where 119910119901is the model prediction value corresponding to X
119896
119910119896is the actual experimental value corresponding to X
119896 and
119879 is total number of predictions from Dt which is 2800 inthis case study The larger the LMAE is the higher the modelaccuracy is The evaluation results are provided in Table 1
The prediction results from Table 1 show that the predic-tion accuracy of the proposed ELM supplementary air-ratiomodel is lower than that of the air-ratio model obtained from[12] It has to be noted that the dynamics of previous air-ratio measurement (ie 119910
119901(119905 minus 1) 119910
119901(119905 minus 2)) are not included
in the construction of the supplementary air-ratio model Itis reasonable that the prediction accuracy is not as good asthe one using these previous air-ratio histories However theaccuracy is still acceptable so ELM was confidently selectedto implement the FTC in this study
070
080
090
100
110
0 400 800 1200 1600 2000 2400 2800
Air-
ratio
Supplementary modelModel from (Wong et al 2014)
Actual air-ratio
Sample (k)
Figure 2 Comparison between predicted air-ratios and the corre-sponding actual air-ratios
4 MPC Based Fault ToleranceController (FTC)
The proposed FTC can be viewed as an improved version ofthe OEMPC from [12] Its aim is to maintain the engine air-ratio control performance when the lambda sensor is underfailureThe design of the proposed FTC is shown in Figure 3
The FTC consists of two air-ratio models including theone from [12] and the supplementary air-ratio model fromSection 3 a switch toggling between these two models andan optimizer based on Brentrsquos method [12 23] The engineresponse over a specified time horizon is predicted by eitherthe air-ratio model from [12] or the supplementary air-ratiomodel depending on the condition of the lambda sensorAs far as the lambda sensor works well the engine responseis predicted by the air-ratio model from [12] Normally thelambda value for a combustible mixture is in the range of04 to 3 [24] When the lambda measured is out of thisrange for a firing engine it means that the lambda sensor isunder failure or during cold start In this situation the engineresponse is predicted by the supplementary air-ratio modelThe predictions are used by the optimizer to determine thetentative fuel injection time 1199061015840 that minimizes the followingperformance criterion over the specified time horizon andthen the optimal fuel injection time signal 119906 is sent to theengine
min 119869 (1199061015840) =1198732
sum
119895=1198731
(119910119903(119905 + 119895) minus 119910
119901(119905 + 119895))
2
+ 120588
119873119906
sum
119895=1
(1199061015840(119905 + 119895 minus 1) minus 119906
1015840(119905 + 119895 minus 2))
2
(12)
where1198731and119873
2define the prediction horizon 119905 and119873
119906are
the time step and the control horizon respectively 119910119903(119905 + 119895)
is the target air-ratio at the time step 119905 + 119895 119910119901is the predicted
air-ratio by either of the two air-ratio models at the time step119905+119895 and 120588 is a user-defined weight which penalizes excessive
Mathematical Problems in Engineering 5
Optimizer(Brentrsquos method)
Supplementary air-ratio model
from (Wong et al 2014)
Real engine
Tentative fuel injection time
Optimized fuel injection time
Actual air-ratio
Yes
Model predicted air-ratio
No
Prediction and optimization loop Time history signal
Target air-ratioyr
yp
u998400
yt
Air-ratio model
u
Engine signal (eg throttle position)
Does lambda sensorwork (ie 04 le yt le 3)
Figure 3 Structure of FTC for engine air-ratio control
movement of the control signal (ie the fuel injection time)The variables 1199061015840(119905 + 119895 minus 1) and 1199061015840(119905 + 119895 minus 2) in the secondpart of (12) are the tentative fuel injection time at the timesteps 119905 + 119895 minus 1 and 119905 + 119895 minus 2 respectively The second partof (12) can ensure the stability of the controller output [12]Moreover the stability of MPC strategy has also been provedin [25 26] so the stability of the proposed control schemecould be guaranteed In short the proposed control scheme inFigure 3 can provide both regular and fault tolerance controlof engine air-ratio
41 Single Dimension Optimization Approach The originaloptimization problem involved in this paper is multidimen-sional and constrained with the tentative control signals1199061015840(119905) 1199061015840(119905 + 1) 119906
1015840(119905 + 119873
119906minus 1) over the control horizon
119873119906which can minimize the objective function 119869(1199061015840) of
(12) Then the predicted air-ratios 119910119901(119905 + 119873
1) 119910119901(119905 + 119873
1+
1) 119910119901(119905 + 119873
2) can trace the target air-ratios 119910
119903(119905 +
1198731) 119910119903(119905 + 119873
1+ 1) 119910
119903(119905 + 119873
2) by using the optimized
fuel injection time-series Each fuel injection time is normallybounded within the range from 2ms to 15ms Howeverthe multidimensional optimization always requires heavycomputation especially when constraints exist Real-timecontrol applications often put emphasis on computationalspeed The research of [10] showed that the one-dimensionalapproach is efficient for real-time air-ratio control and theoverall tracking error is similar to that using multidimen-sional optimization approach Therefore the optimizationproblem to be solved is reduced to one dimension In thispaper the control signal 119906 is assumed to remain constant overthe control horizon Therefore the tentative control signalin the objective function is also constant over the controlhorizon that is 1199061015840(119905) = 1199061015840(119905 + 1) = 1199061015840(119905 +119873
119906minus 1) In this
way only one parameter1199061015840(119905) is needed to be determined andthe final fuel injection time at each time step 119906 is set to be theoptimal value of 1199061015840(119905)
42 Brentrsquos Method There are many optimization techniquesavailable for MPC and each technique has its pros and consA well-known techniquemdashBrentrsquos methodmdashwas selected asthe MPC optimizer in this study for illustrative purposeBrentrsquos method is a robust and efficient optimizationmethodIt combines the typical parabolic interpolation and golden-section search The objective function in each iteration isapproximated by interpolating a parabola through threeexisting points The minimum point of the parabola is takenas a guess for the minimum point if certain criteria aremet Otherwise golden-section search is carried out Theadvantage of this method is that the high convergence rateof parabolic interpolation can be maintained without losingthe robustness of golden-section search [23] The generalworking principle of Brentrsquos method is shown in Figure 4The detail optimization procedure of Brentrsquos method waspresented in [23] and is not presented herein There arethree parameters of Brentrsquos method including the initialinterval of the input variable [119886 119887] (ie the limit of the fuelinjection time) the tolerance tol and themaximum iterationfor stopping the optimization procedure The three variableswere set to be [2 15] 005 and 50 respectively because thefuel injection time varies within 2 to 15ms from 0 to 100throttle
5 Implementation and Evaluation of FTC
51 Experimental Setup To verify its effectiveness the pro-posed FTC was implemented and tested on the same test
6 Mathematical Problems in Engineering
Parabolic interpolation
Start
Yes No
Golden-section search
Output
Yes
No
|J(u998400k+1) minus J(u
998400k)| lt 05 times min (|u
998400k minus a| |b minus u
998400k|)
|u998400k+1 minus u
998400k| lt tol or over maximum iteration
Figure 4 General working principle of Brentrsquos method
car used for sample data collection in Section 3 (HondaDC5 Type-R with K20A i-VTEC engine and MoTeC M800programmable ECU) The algorithm of FTC was first imple-mented using MATLAB A National Instrument (NI) Com-pactDAQ chassis DAQ-9178 was then employed for signalprocessing between the MATLAB program and the MoTeCECU via NI LabVIEW program In other words NI DAQ-9178 serves as an interface between the MATLAB programand the MoTeC ECU Apart from fuel injector control theMoTeC ECU also contains many basic control maps suchas ignition map and valve timing map to maintain theengine operationThe experimental setup and the signal flowbetween the test car and FTC are shown in Figure 5
52 Pilot Test-Tracking Ability To evaluate the tracking per-formance of the proposed FTC a pilot test was carried outThe test was done under the condition that the lambda sensoris already malfunctioning (ie the supplementary air-ratiomodel in the FTC is used) The test cycle for the pilot testis shown in Figure 6 where the throttle position graduallychanges from 15 to 75 throttle (the throttle positionincreases by 15 every 5 s) Such test cycle is designed byreferring to [10] which almost covers the whole operatingcondition In this test the air-ratio is required to trackthe target air-ratios from the stoichiometric value (100) forminimum emissions to a value for the best brake-specificfuel consumption (105) and then to a value for maximumengine power (095) as the throttle position is graduallychanged from 15 to 75 throttle Such tracking of air-ratiochanges is essential for automobiles to satisfy the emissionfuel consumption and power requirements under differentoperating conditions [6]
After choosing the sampling time to be 001 s the trackingability of the FTC was examined By trial-and-error theparameters of the optimizer were chosen as119873
1= 1119873
2= 8
120588 = 075 and 119873119906= 5 With the test cycle shown in Fig-
ure 6 and the parameters chosen the air-ratio control resultand the corresponding fuel injection time of the FTC areshown in Figure 7 It can be seen from Figure 7 that the FTCcan regulate the air-ratio to follow the target air-ratios withacceptable deviation even when the lambda sensor is underfailure
To further verify the result three tests were done Thefirst one was conducted under the condition that the lambdasensor did not work and traditional air-ratio controller (iefactory lookup table) was employed The other two werecarried out under the condition that the lambda sensor couldwork well and a diagonal recurrent neural-network modelpredictive controller (DNMPC) which is a recent air-ratiocontrol algorithm applicable when the lambda sensor worksnormally [10] was employed along with the proposed FTCfor comparison purpose The air-ratio control results and thecorresponding fuel injection time of the three tests are shownin Figures 8 9 and 10 respectively
When comparing Figure 8 to Figure 7 it is obvious thatthe proposed FTC outperforms traditional air-ratio controlsystemwhen the lambda sensor does not work Furthermoreby comparing Figures 9 and 10 it can be seen that theproposed FTC can perform slightly better than the DNMPCwhen the lambda sensor works properly Finally comparingFigure 10 to Figure 7 it can be learnt that the proposed FTCcan achieve better performance when the lambda sensor isunder normal conditionThis is not surprising because whenthe lambda sensor works well the air-ratio model from [12]which has better prediction capability is utilized resulting in
Mathematical Problems in Engineering 7
Optimizer(Brentrsquos
method)Supplementaryair-ratio model
Air-ratio model from
Real air-ratio
lambda sensor
YesDoes lambda sensor work
FTC work flow
Test car
Sensor signals
Control signal
MoTeC M800 ECU
NI DAQ-9178
LabVIEW interfaceprogram
(ie 04 le yt le 3)
yt measured by
(Wong et al 2014)
Figure 5 Experimental setup and signal flow between test car and FTC
102030405060708090
0 5 10 15 20 25
Thro
ttle p
ositi
on (
)
Time (s)
Figure 6 Test cycle throttle position versus time
better control performance For comparison purpose LMAEis again chosen as the tracking index (TI) to evaluate thetracking ability of the controllers defined by
TI = minus log[ 1119879119904
119879119904
sum
119896=1
1003816100381610038161003816119910119905 minus 119910119903 (119905)1003816100381610038161003816]
(13)
where 119905 is time step 119879119904is the total number of time step in
the test 119910119905is the actual air-ratio at each time step and 119910
119903(119905) is
the corresponding target air-ratio at each time stepThe targetair-ratio varies according to the aforesaid practical operating
Table 2 Performance of different controllers for the pilot test
Controller Lambda sensor TI Maximum overshootFTC Under failure 21022 01188Traditional system Under failure 16244 01235DNMPC Normal 22896 01267FTC Normal 23309 01074
conditionsThe corresponding results under different lambdasensor conditions are shown in Table 2
The results in Table 2 show that even when the lambdasensor is under failure the control performance of the FTCcan still maintain about 90 of that under normal lambdasensor condition Table 2 also shows that the performanceof the proposed FTC under sensor failure is similar to thatof DNMPC The reason may be that the accuracy of theELM supplementary model is similar to that of the time-series diagonal neural-network model in [10] Moreover ascompared to traditional air-ratio control system (ie factorylookup table) the proposed FTC can improve the air-ratiocontrol performance at about 30 when the lambda sensoris under failure indicating that the overall air-ratio controlperformance of the FTC is satisfactory
Air-ratio model prediction accuracy is one of the mostimportant factors affecting the control performance of
8 Mathematical Problems in Engineering
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 7 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under lambda sensor failure
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 8 (a) Air-ratio control results and (b) corresponding fuel injection time of traditional air-ratio control system under lambda sensorfailure (ie using factory lookup table only)
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 9 (a) Air-ratio control results and (b) corresponding fuel injection time of DNMPC under normal lambda sensor condition
the model predictive controllers Therefore as the air-ratiomeasurement cannot be provided for model prediction whenthe lambda sensor is under failure degrading of the air-ratiocontrol performance is unavoidable Thankfully with the
proposed ELM supplementary air-ratio model the controlperformance can still be maintained at an acceptable rangeThis implies that the proposed model and control strategy isfeasible
Mathematical Problems in Engineering 9
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 10 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under normal lambda sensor condition
6 Conclusions
In this study a supplementary air-ratio model was con-structed using kernel-based ELM in which the air-ratio timehistories were not included in the model input The purposeof the model is to predict the future air-ratio dynamics whenthe previous air-ratio measurement is unavailable With thesupplementary air-ratio model a FTC for engine air-ratiocontrol was developed as the first attempt in the literature Intraditional case the lambda sensor is assumed to work prop-erly so traditional air-ratio control system may not performwell when the lambda sensor is malfunctioningThe purposeof the proposed FTC is to maintain the air-ratio controlperformance even when the lambda sensor is under failureor during cold start
To evaluate its performance the proposed FTC was suc-cessfully implemented and tested on a real automotive engineExperimental results show that when the lambda sensor doesnot work well the air-ratio control performance of the FTCcan be effectively maintained over 90 of that under normallambda sensor condition Therefore the FTC is a promisingbackup engine air-ratio control strategy In other words theproposed control scheme in Figure 3 is very suitable toimplement in the automotive ECU to provide both regularand fault tolerance control of engine air-ratio
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is supported by the University of MacauResearch Grant (Grant nos MYRG2014-00178-FST andMYRG075(Y1-L2)-FST13-VCM) The research is also sup-ported by the Science and Technology Development Fund ofMacau (Grant no FDCT0752013A)
References
[1] J Heinrich P E Schwarze N Stilianakis et al Health Effectsof Transport-Related Air Pollution World Health Organization2005
[2] S S Lim T Vos A D Flaxman et al ldquoA comparative riskassessment of burden of disease and injury attributable to 67risk factors and risk factor clusters in 21 regions 1990ndash2010a systematic analysis for the Global Burden of Disease Study2010rdquoThe Lancet vol 380 no 9859 pp 2224ndash2260 2010
[3] S H L Yim and S R H Barrett ldquoPublic health impacts ofcombustion emissions in the United Kingdomrdquo EnvironmentalScience amp Technology vol 46 no 8 pp 4291ndash4296 2012
[4] K Zhang and S Batterman ldquoAir pollution and health risks dueto vehicle trafficrdquo Science of the Total Environment vol 450-451pp 307ndash316 2013
[5] J B Heywood Internal Combustion Engine FundamentalsMcGraw-Hill New York NY USA 1988
[6] T Gilles Automotive Service Inspection Maintenance RepairCengage Learning 2011
[7] S Pace and G G Zhu ldquoSliding mode control of both air-to-fuel and fuel ratios for a dual-fuel internal combustion enginerdquoJournal of Dynamic Systems Measurement and Control vol 134no 3 Article ID 031012 2012
[8] R Tafreshi B Ebrahimi J Mohammadpour M A FranchekK Grigoriadis and H Masudi ldquoLinear dynamic parameter-varying sliding manifold for air-fuel ratio control in lean-burnenginesrdquo IET Control Theory amp Applications vol 7 no 10 pp1319ndash1329 2013
[9] B Ebrahimi R Tafreshi H Masudi M Franchek J Moham-madpour andKGrigoriadis ldquoAparameter-varying filtered PIDstrategy for air-fuel ratio control of spark ignition enginesrdquoControl Engineering Practice vol 20 no 8 pp 805ndash815 2012
[10] Y-J Zhai D-W Yu H-Y Guo and D L Yu ldquoRobust airfuelratio control with adaptive DRNN model and AD tuningrdquoEngineering Applications of Artificial Intelligence vol 23 no 2pp 283ndash289 2010
[11] T Sardarmehni J Keighobadi M B Menhaj and H RahmanildquoRobust predictive control of lambda in internal combustionengines using neural networksrdquo Archives of Civil and Mechani-cal Engineering vol 13 no 4 pp 432ndash443 2013
10 Mathematical Problems in Engineering
[12] P K Wong H C Wong C M Vong Z Xie and SHuang ldquoModel predictive engine air-ratio control using onlinesequential extreme learning machinerdquo Neural Computing andApplications 2014
[13] P K Wong L M Tam K Li and C M Vong ldquoEngine idle-speed system modelling and control optimization using arti-ficial intelligencerdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 224no 1 pp 55ndash72 2010
[14] Y-W Kim G Rizzoni and V I Utkin ldquoDeveloping a faulttolerant power-train control system by integrating design ofcontrol and diagnosticsrdquo International Journal of Robust andNonlinear Control vol 11 no 11 pp 1095ndash1114 2001
[15] E Gassenfeit and J Powell ldquoAlgorithms for air-fuel ratioestimation using internal combustion engine cylinder pressurerdquoSAE Technical Paper 890300 1989
[16] J R Asik G M Meyer and D X Tang ldquoAF ratio estimationand control based on induced engine roughnessrdquo IEEE ControlSystems Magazine vol 16 no 6 pp 35ndash42 1996
[17] G-B Huang ldquoAn insight into extreme learning machinesrandom neurons random features and kernelsrdquo CognitiveComputation vol 6 no 3 pp 376ndash390 2014
[18] K I Wong P K Wong C S Cheung and C M Vong ldquoMod-elling of diesel engine performance using advanced machinelearning methods under scarce and exponential data setrdquoApplied Soft Computing vol 13 no 11 pp 4428ndash4441 2013
[19] J W Cao Z P Lin G-B Huang and N Liu ldquoVoting basedextreme learning machinerdquo Information Sciences vol 185 pp66ndash77 2012
[20] I Lou Z Xie W K Ung and K M Mok ldquoFreshwateralgal bloom prediction by extreme learning machine in MacauStorage Reservoirsrdquo Neural Computing and Applications 2014
[21] J Cao and L Xiong ldquoProtein sequence classification withimproved extreme learning machine algorithmsrdquo BioMedResearch International vol 2014 Article ID 103054 12 pages2014
[22] P K Wong K I Wong C M Vong and C S CheungldquoModeling and optimization of biodiesel engine performanceusing kernel-based extreme learning machine and cuckoosearchrdquo Renewable Energy vol 74 pp 640ndash647 2015
[23] T R Chandrupatla ldquoAn efficient quadratic fitmdashsectioningalgorithm for minimization without derivativesrdquo ComputerMethods in Applied Mechanics and Engineering vol 152 no 1-2 pp 211ndash217 1998
[24] W W Pulkrabek Engineering Fundamentals of the InternalCombustion Engine Pearson Prentice Hall 2nd edition 2004
[25] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[26] G Y Li Application of Intelligent Control and MATLAB to Elec-tronically Controlled Engines Publishing House of ElectronicsIndustry Beijing China 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
for a real engine so this strategy may not be suitable forpractical use Although PID control is the most widely usedapproach in practice the calibration and tuning of the controlparameters are very time-consuming and engine dependentThe tuned PID controller cannot deal with steady distur-bance or any change in the engine conditions either Thusamong these researches the most appropriate and promisingtechnique for air-ratio control is the neural-network-basedMPC due to its robustness to multivariable time-varyingand delay systems like modern engine systems [12] It is well-known that a reliable predictionmodel is the core componentof the MPC but the engine models developed in [10 11]were only surrogate models That is the models were trainedfrom the data generated by empirical equations rather thana real engine Therefore similar to the deficiency of slid-ing mode control approach the neural-network predictionmodels in [10 11] derived from data generated by empiricalequations cannot effectively reflect the actual performanceof real engines In the most recent study of MPC air-control strategy [12] the prediction model for the controllerwas constructed based on experimental data rather thannumerical data Experimental results in [12] showed that thecontroller performance is superior to those of [10 11] in realapplication Nevertheless one major concern for the controlstrategy in [12] is that the prediction model must rely on thereal-time air-ratio signal measured from the lambda sensorlocated at the exhaust pipe of the engine When the sensor isunder failure or warming up during cold start the controllerbecomes ineffective resulting in poor control performance
In fact for most of the current available air-ratio controlapproaches the air-ratio measurement must be acquiredas the feedback to the controllers Hence the problem oflambda sensor failuremust be addressed Although on-boarddiagnostics for the lambda sensor has been a requirementfor more than two decades [14] and any fault of the lambdasensor must be reflected through the ldquocheck enginerdquo light onthe instrument panel the driver may not be aware of suchfault and may not be willing to replace the lambda sensorwhen the car can still be driven without significant defectIn that case the emissions and fuel consumption of that carare already significantly deteriorated Therefore maintaininga satisfactory air-ratio control performance when the lambdasensor is under failure or warming up during cold startis of great significance This paper proposes to build asupplementary air-ratio model to compensate the lambdasensor in which the measured air-ratio signal is not requiredas the model input
From the open literature [15 16] it is possible to predictthe air-ratio without using the previous air-ratio signal Forinstance Gassenfeit and Powell [15] compared two algo-rithms that can predict the air-ratio from either the cylinderpressure time history patterns or the ratio of the cylinderpressure before and after combustion Another example isthe method described by Asik et al [16] in which the air-ratio can be roughly estimated from induced crankshaft speedfluctuations However the quantities used in these algo-rithms say the in-cylinder pressure and delicate crankshaftspeed fluctuation are usually unavailable in normal vehicleengines because expensive sensors are required Moreover
as mentioned empirical equations may not be suitable forreal applications Thus by following the framework in [12]this study attempts to construct the air-ratio model fromexperimental data Extreme learning machine (ELM) [17]is currently a popular and effective algorithm for trainingmodel from sample data Many recent studies [18 19] alreadyshowed that ELM is superior to other famous methods suchas neural-networks least squares support vector machinesand relevance vector machine in terms of generaliza-tion performance and computational load ELM has beenemployed for various practical applications too [20 21]ThusELM is selected in this study to develop the supplementaryair-ratio model
Among so many variants of ELM kernel-based ELM isadopted in this study to build the model It is because inkernel ELM the random feature mapping is replaced witha kernel function so randomness does not occur and thechance of result variations could be reduced [22] In fact themodel built in [12] was based on an online variant of ELMwhose backbone is simply a basic ELM (ie the model is stillan ELM with random feature mapping but can be updatedwhen online data is provided)The reason why offline versionof ELM is used in this paper instead of the online one is thatthe real-time data of air-ratio will not be available when thelambda sensor is malfunctioning As both the air-ratiomodelfrom [12] and the proposed air-ratiomodel aremade from thesame basis (kernel ELM) a fair comparison can be made toevaluate their performances
In order to verify the effectiveness of the ELM supple-mentary air-ratio model this paper also proposes a non-linear MPC algorithm for air-ratio control which utilizesa switch to toggle between the lambda sensor signals andthe ELM supplementary air-ratio model predictions Whenthe lambda sensor works well the air-ratio measurementwill be used when the lambda sensor is under failure thebackup air-ratio model will be used The MPC under suchstrategy is called fault tolerance controller (FTC) which is anovel nontrivial application of ELM Based on the multiple-step-ahead air-ratio predictions a control signal is obtainedto regulate the air-ratio to trace the desired values Theproposed FTC is also comparedwith the typical air-ratio con-trol techniques including online sequential extreme learningmachine model predictive controller (OEMPC) [12] diag-onal recurrent neural-network model predictive controller(DNMPC) [10] and traditional open-loop air-ratio controlsystem to evaluate its performance The concept of kernel-based ELM is provided in Section 2 The construction andevaluation of the ELM supplementary air-ratio model aregiven in Section 3 The detail of the FTC design is presentedin Section 4 Experimental implementation and evaluation ofthe proposed FTC and OEMPC are provided in Section 5
2 Kernel-Based Extreme Learning Machine
Kernel-based ELM is a learning scheme for single-hidden-layer feedforward network with the use of kernel [17]Considering a set of 119873 training samples D = (x
119894 119905119894) 119894 =
1 119873 with each x119894being a 119889 dimensional input vector
Mathematical Problems in Engineering 3
and 119905119894as the target scalar output a single-hidden-layer
feedforward network with 119871 hidden nodes can be written as
119871
sum
119896=1
120573119896ℎ119896(x119894) = h (x
119894)120573 = 119905
119894 119894 = 1 119873 (1)
where h(x119894) = [ℎ1(x119894) ℎ119871(x119894)] is the feature mapping out-
put with respect to x119894and 120573 = [1205731 120573119871]
119879 is the outputweight vector In kernel-based ELM this weight vector isdetermined by minimizing both the norm of the weight vec-tor and the training error The corresponding optimizationproblem is
Minimize 1210038171003817100381710038171205731003817100381710038171003817
2+ 119862
12
119873
sum
119894=1
10038171003817100381710038171205791198941003817100381710038171003817
2
Subject to 120579119894= 119905119894minus h (x
119894)120573 119894 = 1 119873
(2)
where 119862 is a user-specified penalty term for regularizationpurpose
Then based on the Karush-Kuhn-Tucker theorem opti-mizing (2) is equal to solving the following dual optimizationproblem
LELM =1210038171003817100381710038171205731003817100381710038171003817
2+ 119862
12
119873
sum
119894=1
10038171003817100381710038171205791198941003817100381710038171003817
2
minus
119873
sum
119894=1120572119894(h (x119894)120573 minus 119905
119894+ 120579119894)
(3)
where 120572119894is the Lagrange multiplier
By taking derivatives on (3) the following conditions areobtained
120597LELM120597120573
= 0 997888rarr 120573 =119873
sum
119894=1120572119894h (x119894)119879997888rarr 120573 = H119879120572
120597LELM120597120579119894
= 0 997888rarr 120572119894= 119862120579119894 119894 = 1 119873
120597LELM120597120572119894
= 0 997888rarr h (x119894)120573 minus 119905
119894+ 120579119894= 0 119894 = 1 119873
(4)
where
120572 = [1205721 120572119873]119879 H = [[
[
ℎ1 (x1) sdot sdot sdot ℎ119871(x1)
d
ℎ1 (x119873) sdot sdot sdot ℎ119871 (x119873)
]]
]119873times119871
(5)
By combining the conditions in (4) and eliminating theLagrange multipliers 120572
119894 the optimal weight vector could be
calculated as
120573 = H119879( I119862+HH119879)
minus1T (6)
where T = [1199051 119905119873]119879 and I is the identity matrix
With (6) the output function of the network for anunknown input X becomes
119891 (X) = h (X)H119879( I119862+HH119879)
minus1T (7)
Finally by defining a kernel matrix satisfying Mercerrsquosconditions as
ΩELM = HH119879 ΩELM119886119887 = ℎ (x119886) sdot ℎ (x119887)
= 119870 (x119886 x119887)
(8)
(7) becomes
119891 (X) = [[[
119870 (X x1)
119870 (X x119873)
]]
]
119879
(I119862+ΩELM)
minus1
T (9)
In this study the function 119891(X) is the supplementary air-ratio model
3 Supplementary Air-Ratio Model
31 Model Construction The objective of the ELM supple-mentary air-ratio model is to predict the future air-ratio119910119901when the lambda sensor is under failure or during cold
start Previous air-ratio measurementmust not be used as theinputs to the model Three engine parameters related closelyto the air-ratio performance were carefully selected as themodel inputs fuel injection time (FI) engine speed (ES) andthrottle position (TP) The order of the system dynamics waschosen to be 2 (ie second-order system with 2 past timesteps) which gives the minimum prediction error [12] Thestructure of the supplementary air-ratio model is shown inFigure 1
To build the supplementary air-ratiomodel experimentalengine data was used rather than empirical equation dataA Honda DC5 Type-R test car with K20A i-VTEC enginewas employed to perform the experiment A MoTeC M800programmable electronic control unit (ECU) with factorycalibration data was used as a base controller to control theengine The car was run over a dyno test and totally 5800data samples were acquired using a wide-band lambda sensorsubject to random throttle positions The first 3000 datasamples were used as the training dataset D to build thesupplementary air-ratio model The last 2800 data sampleswere used as the test dataset Dt to evaluate the generaliza-tion of the built supplementary air-ratio model After train-ing the output function of the ELM supplementary modelfor an unseen case can be written in the following form
119910119901=[[
[
119870 (X x1)
119870 (X x119873)
]]
]
119879
(I119862+ΩELM)
minus1
T (10)
where xT isin D are the training data 119910119901is the prediction
output vector X is the unseen input vector 119870(x119886 x119887) =
exp(minusx119886minus x119887221205902) is the selected radial basis function
4 Mathematical Problems in Engineering
Supplementary air-ratio model
FI (t minus 2)
FI (t minus 1)
ES (t minus 2)
ES (t minus 1)
TP (t minus 2)
TP (t minus 1)
yp (t)
Figure 1 Structure of the ELM supplementary air-ratio model
Table 1 Accuracy of different air-ratio models
Air-ratio model LMAESupplementary air-ratio model 18559Air-ratio model obtained from [12] 22424
kernel I is the identity matrix and 119862 is the user-specifiedpenalty term The hyperparameters of 1205902 and 119862 in thekernel-based ELM were tuned by using the hybrid inferenceintroduced in [18] which combined leave-one-out crossvalidation and Bayesian inference The details can be foundin [18]
32 Evaluation of Engine Air-Ratio Model To evaluate theproposed ELM supplementary air-ratio model its predictionresult was compared with the air-ratio model obtained from[12] which is a time-series model with the air-ratio historiesas the input The performance of the models is evaluated interms of prediction accuracy for unseen case from Dt Theprediction results of the two air-ratio models over Dt areshown in Figure 2
From Figure 2 it can be seen that both models achievecomparative performance To further evaluate the predictionaccuracy the logarithmic mean absolute error (LMAE) forthe prediction of each model is determined using the follow-ing equation
LMAE = minus log[ 1119879
119879
sum
119896=1
10038161003816100381610038161003816119910119896minus 119910119901
10038161003816100381610038161003816] (11)
where 119910119901is the model prediction value corresponding to X
119896
119910119896is the actual experimental value corresponding to X
119896 and
119879 is total number of predictions from Dt which is 2800 inthis case study The larger the LMAE is the higher the modelaccuracy is The evaluation results are provided in Table 1
The prediction results from Table 1 show that the predic-tion accuracy of the proposed ELM supplementary air-ratiomodel is lower than that of the air-ratio model obtained from[12] It has to be noted that the dynamics of previous air-ratio measurement (ie 119910
119901(119905 minus 1) 119910
119901(119905 minus 2)) are not included
in the construction of the supplementary air-ratio model Itis reasonable that the prediction accuracy is not as good asthe one using these previous air-ratio histories However theaccuracy is still acceptable so ELM was confidently selectedto implement the FTC in this study
070
080
090
100
110
0 400 800 1200 1600 2000 2400 2800
Air-
ratio
Supplementary modelModel from (Wong et al 2014)
Actual air-ratio
Sample (k)
Figure 2 Comparison between predicted air-ratios and the corre-sponding actual air-ratios
4 MPC Based Fault ToleranceController (FTC)
The proposed FTC can be viewed as an improved version ofthe OEMPC from [12] Its aim is to maintain the engine air-ratio control performance when the lambda sensor is underfailureThe design of the proposed FTC is shown in Figure 3
The FTC consists of two air-ratio models including theone from [12] and the supplementary air-ratio model fromSection 3 a switch toggling between these two models andan optimizer based on Brentrsquos method [12 23] The engineresponse over a specified time horizon is predicted by eitherthe air-ratio model from [12] or the supplementary air-ratiomodel depending on the condition of the lambda sensorAs far as the lambda sensor works well the engine responseis predicted by the air-ratio model from [12] Normally thelambda value for a combustible mixture is in the range of04 to 3 [24] When the lambda measured is out of thisrange for a firing engine it means that the lambda sensor isunder failure or during cold start In this situation the engineresponse is predicted by the supplementary air-ratio modelThe predictions are used by the optimizer to determine thetentative fuel injection time 1199061015840 that minimizes the followingperformance criterion over the specified time horizon andthen the optimal fuel injection time signal 119906 is sent to theengine
min 119869 (1199061015840) =1198732
sum
119895=1198731
(119910119903(119905 + 119895) minus 119910
119901(119905 + 119895))
2
+ 120588
119873119906
sum
119895=1
(1199061015840(119905 + 119895 minus 1) minus 119906
1015840(119905 + 119895 minus 2))
2
(12)
where1198731and119873
2define the prediction horizon 119905 and119873
119906are
the time step and the control horizon respectively 119910119903(119905 + 119895)
is the target air-ratio at the time step 119905 + 119895 119910119901is the predicted
air-ratio by either of the two air-ratio models at the time step119905+119895 and 120588 is a user-defined weight which penalizes excessive
Mathematical Problems in Engineering 5
Optimizer(Brentrsquos method)
Supplementary air-ratio model
from (Wong et al 2014)
Real engine
Tentative fuel injection time
Optimized fuel injection time
Actual air-ratio
Yes
Model predicted air-ratio
No
Prediction and optimization loop Time history signal
Target air-ratioyr
yp
u998400
yt
Air-ratio model
u
Engine signal (eg throttle position)
Does lambda sensorwork (ie 04 le yt le 3)
Figure 3 Structure of FTC for engine air-ratio control
movement of the control signal (ie the fuel injection time)The variables 1199061015840(119905 + 119895 minus 1) and 1199061015840(119905 + 119895 minus 2) in the secondpart of (12) are the tentative fuel injection time at the timesteps 119905 + 119895 minus 1 and 119905 + 119895 minus 2 respectively The second partof (12) can ensure the stability of the controller output [12]Moreover the stability of MPC strategy has also been provedin [25 26] so the stability of the proposed control schemecould be guaranteed In short the proposed control scheme inFigure 3 can provide both regular and fault tolerance controlof engine air-ratio
41 Single Dimension Optimization Approach The originaloptimization problem involved in this paper is multidimen-sional and constrained with the tentative control signals1199061015840(119905) 1199061015840(119905 + 1) 119906
1015840(119905 + 119873
119906minus 1) over the control horizon
119873119906which can minimize the objective function 119869(1199061015840) of
(12) Then the predicted air-ratios 119910119901(119905 + 119873
1) 119910119901(119905 + 119873
1+
1) 119910119901(119905 + 119873
2) can trace the target air-ratios 119910
119903(119905 +
1198731) 119910119903(119905 + 119873
1+ 1) 119910
119903(119905 + 119873
2) by using the optimized
fuel injection time-series Each fuel injection time is normallybounded within the range from 2ms to 15ms Howeverthe multidimensional optimization always requires heavycomputation especially when constraints exist Real-timecontrol applications often put emphasis on computationalspeed The research of [10] showed that the one-dimensionalapproach is efficient for real-time air-ratio control and theoverall tracking error is similar to that using multidimen-sional optimization approach Therefore the optimizationproblem to be solved is reduced to one dimension In thispaper the control signal 119906 is assumed to remain constant overthe control horizon Therefore the tentative control signalin the objective function is also constant over the controlhorizon that is 1199061015840(119905) = 1199061015840(119905 + 1) = 1199061015840(119905 +119873
119906minus 1) In this
way only one parameter1199061015840(119905) is needed to be determined andthe final fuel injection time at each time step 119906 is set to be theoptimal value of 1199061015840(119905)
42 Brentrsquos Method There are many optimization techniquesavailable for MPC and each technique has its pros and consA well-known techniquemdashBrentrsquos methodmdashwas selected asthe MPC optimizer in this study for illustrative purposeBrentrsquos method is a robust and efficient optimizationmethodIt combines the typical parabolic interpolation and golden-section search The objective function in each iteration isapproximated by interpolating a parabola through threeexisting points The minimum point of the parabola is takenas a guess for the minimum point if certain criteria aremet Otherwise golden-section search is carried out Theadvantage of this method is that the high convergence rateof parabolic interpolation can be maintained without losingthe robustness of golden-section search [23] The generalworking principle of Brentrsquos method is shown in Figure 4The detail optimization procedure of Brentrsquos method waspresented in [23] and is not presented herein There arethree parameters of Brentrsquos method including the initialinterval of the input variable [119886 119887] (ie the limit of the fuelinjection time) the tolerance tol and themaximum iterationfor stopping the optimization procedure The three variableswere set to be [2 15] 005 and 50 respectively because thefuel injection time varies within 2 to 15ms from 0 to 100throttle
5 Implementation and Evaluation of FTC
51 Experimental Setup To verify its effectiveness the pro-posed FTC was implemented and tested on the same test
6 Mathematical Problems in Engineering
Parabolic interpolation
Start
Yes No
Golden-section search
Output
Yes
No
|J(u998400k+1) minus J(u
998400k)| lt 05 times min (|u
998400k minus a| |b minus u
998400k|)
|u998400k+1 minus u
998400k| lt tol or over maximum iteration
Figure 4 General working principle of Brentrsquos method
car used for sample data collection in Section 3 (HondaDC5 Type-R with K20A i-VTEC engine and MoTeC M800programmable ECU) The algorithm of FTC was first imple-mented using MATLAB A National Instrument (NI) Com-pactDAQ chassis DAQ-9178 was then employed for signalprocessing between the MATLAB program and the MoTeCECU via NI LabVIEW program In other words NI DAQ-9178 serves as an interface between the MATLAB programand the MoTeC ECU Apart from fuel injector control theMoTeC ECU also contains many basic control maps suchas ignition map and valve timing map to maintain theengine operationThe experimental setup and the signal flowbetween the test car and FTC are shown in Figure 5
52 Pilot Test-Tracking Ability To evaluate the tracking per-formance of the proposed FTC a pilot test was carried outThe test was done under the condition that the lambda sensoris already malfunctioning (ie the supplementary air-ratiomodel in the FTC is used) The test cycle for the pilot testis shown in Figure 6 where the throttle position graduallychanges from 15 to 75 throttle (the throttle positionincreases by 15 every 5 s) Such test cycle is designed byreferring to [10] which almost covers the whole operatingcondition In this test the air-ratio is required to trackthe target air-ratios from the stoichiometric value (100) forminimum emissions to a value for the best brake-specificfuel consumption (105) and then to a value for maximumengine power (095) as the throttle position is graduallychanged from 15 to 75 throttle Such tracking of air-ratiochanges is essential for automobiles to satisfy the emissionfuel consumption and power requirements under differentoperating conditions [6]
After choosing the sampling time to be 001 s the trackingability of the FTC was examined By trial-and-error theparameters of the optimizer were chosen as119873
1= 1119873
2= 8
120588 = 075 and 119873119906= 5 With the test cycle shown in Fig-
ure 6 and the parameters chosen the air-ratio control resultand the corresponding fuel injection time of the FTC areshown in Figure 7 It can be seen from Figure 7 that the FTCcan regulate the air-ratio to follow the target air-ratios withacceptable deviation even when the lambda sensor is underfailure
To further verify the result three tests were done Thefirst one was conducted under the condition that the lambdasensor did not work and traditional air-ratio controller (iefactory lookup table) was employed The other two werecarried out under the condition that the lambda sensor couldwork well and a diagonal recurrent neural-network modelpredictive controller (DNMPC) which is a recent air-ratiocontrol algorithm applicable when the lambda sensor worksnormally [10] was employed along with the proposed FTCfor comparison purpose The air-ratio control results and thecorresponding fuel injection time of the three tests are shownin Figures 8 9 and 10 respectively
When comparing Figure 8 to Figure 7 it is obvious thatthe proposed FTC outperforms traditional air-ratio controlsystemwhen the lambda sensor does not work Furthermoreby comparing Figures 9 and 10 it can be seen that theproposed FTC can perform slightly better than the DNMPCwhen the lambda sensor works properly Finally comparingFigure 10 to Figure 7 it can be learnt that the proposed FTCcan achieve better performance when the lambda sensor isunder normal conditionThis is not surprising because whenthe lambda sensor works well the air-ratio model from [12]which has better prediction capability is utilized resulting in
Mathematical Problems in Engineering 7
Optimizer(Brentrsquos
method)Supplementaryair-ratio model
Air-ratio model from
Real air-ratio
lambda sensor
YesDoes lambda sensor work
FTC work flow
Test car
Sensor signals
Control signal
MoTeC M800 ECU
NI DAQ-9178
LabVIEW interfaceprogram
(ie 04 le yt le 3)
yt measured by
(Wong et al 2014)
Figure 5 Experimental setup and signal flow between test car and FTC
102030405060708090
0 5 10 15 20 25
Thro
ttle p
ositi
on (
)
Time (s)
Figure 6 Test cycle throttle position versus time
better control performance For comparison purpose LMAEis again chosen as the tracking index (TI) to evaluate thetracking ability of the controllers defined by
TI = minus log[ 1119879119904
119879119904
sum
119896=1
1003816100381610038161003816119910119905 minus 119910119903 (119905)1003816100381610038161003816]
(13)
where 119905 is time step 119879119904is the total number of time step in
the test 119910119905is the actual air-ratio at each time step and 119910
119903(119905) is
the corresponding target air-ratio at each time stepThe targetair-ratio varies according to the aforesaid practical operating
Table 2 Performance of different controllers for the pilot test
Controller Lambda sensor TI Maximum overshootFTC Under failure 21022 01188Traditional system Under failure 16244 01235DNMPC Normal 22896 01267FTC Normal 23309 01074
conditionsThe corresponding results under different lambdasensor conditions are shown in Table 2
The results in Table 2 show that even when the lambdasensor is under failure the control performance of the FTCcan still maintain about 90 of that under normal lambdasensor condition Table 2 also shows that the performanceof the proposed FTC under sensor failure is similar to thatof DNMPC The reason may be that the accuracy of theELM supplementary model is similar to that of the time-series diagonal neural-network model in [10] Moreover ascompared to traditional air-ratio control system (ie factorylookup table) the proposed FTC can improve the air-ratiocontrol performance at about 30 when the lambda sensoris under failure indicating that the overall air-ratio controlperformance of the FTC is satisfactory
Air-ratio model prediction accuracy is one of the mostimportant factors affecting the control performance of
8 Mathematical Problems in Engineering
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 7 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under lambda sensor failure
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 8 (a) Air-ratio control results and (b) corresponding fuel injection time of traditional air-ratio control system under lambda sensorfailure (ie using factory lookup table only)
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 9 (a) Air-ratio control results and (b) corresponding fuel injection time of DNMPC under normal lambda sensor condition
the model predictive controllers Therefore as the air-ratiomeasurement cannot be provided for model prediction whenthe lambda sensor is under failure degrading of the air-ratiocontrol performance is unavoidable Thankfully with the
proposed ELM supplementary air-ratio model the controlperformance can still be maintained at an acceptable rangeThis implies that the proposed model and control strategy isfeasible
Mathematical Problems in Engineering 9
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 10 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under normal lambda sensor condition
6 Conclusions
In this study a supplementary air-ratio model was con-structed using kernel-based ELM in which the air-ratio timehistories were not included in the model input The purposeof the model is to predict the future air-ratio dynamics whenthe previous air-ratio measurement is unavailable With thesupplementary air-ratio model a FTC for engine air-ratiocontrol was developed as the first attempt in the literature Intraditional case the lambda sensor is assumed to work prop-erly so traditional air-ratio control system may not performwell when the lambda sensor is malfunctioningThe purposeof the proposed FTC is to maintain the air-ratio controlperformance even when the lambda sensor is under failureor during cold start
To evaluate its performance the proposed FTC was suc-cessfully implemented and tested on a real automotive engineExperimental results show that when the lambda sensor doesnot work well the air-ratio control performance of the FTCcan be effectively maintained over 90 of that under normallambda sensor condition Therefore the FTC is a promisingbackup engine air-ratio control strategy In other words theproposed control scheme in Figure 3 is very suitable toimplement in the automotive ECU to provide both regularand fault tolerance control of engine air-ratio
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is supported by the University of MacauResearch Grant (Grant nos MYRG2014-00178-FST andMYRG075(Y1-L2)-FST13-VCM) The research is also sup-ported by the Science and Technology Development Fund ofMacau (Grant no FDCT0752013A)
References
[1] J Heinrich P E Schwarze N Stilianakis et al Health Effectsof Transport-Related Air Pollution World Health Organization2005
[2] S S Lim T Vos A D Flaxman et al ldquoA comparative riskassessment of burden of disease and injury attributable to 67risk factors and risk factor clusters in 21 regions 1990ndash2010a systematic analysis for the Global Burden of Disease Study2010rdquoThe Lancet vol 380 no 9859 pp 2224ndash2260 2010
[3] S H L Yim and S R H Barrett ldquoPublic health impacts ofcombustion emissions in the United Kingdomrdquo EnvironmentalScience amp Technology vol 46 no 8 pp 4291ndash4296 2012
[4] K Zhang and S Batterman ldquoAir pollution and health risks dueto vehicle trafficrdquo Science of the Total Environment vol 450-451pp 307ndash316 2013
[5] J B Heywood Internal Combustion Engine FundamentalsMcGraw-Hill New York NY USA 1988
[6] T Gilles Automotive Service Inspection Maintenance RepairCengage Learning 2011
[7] S Pace and G G Zhu ldquoSliding mode control of both air-to-fuel and fuel ratios for a dual-fuel internal combustion enginerdquoJournal of Dynamic Systems Measurement and Control vol 134no 3 Article ID 031012 2012
[8] R Tafreshi B Ebrahimi J Mohammadpour M A FranchekK Grigoriadis and H Masudi ldquoLinear dynamic parameter-varying sliding manifold for air-fuel ratio control in lean-burnenginesrdquo IET Control Theory amp Applications vol 7 no 10 pp1319ndash1329 2013
[9] B Ebrahimi R Tafreshi H Masudi M Franchek J Moham-madpour andKGrigoriadis ldquoAparameter-varying filtered PIDstrategy for air-fuel ratio control of spark ignition enginesrdquoControl Engineering Practice vol 20 no 8 pp 805ndash815 2012
[10] Y-J Zhai D-W Yu H-Y Guo and D L Yu ldquoRobust airfuelratio control with adaptive DRNN model and AD tuningrdquoEngineering Applications of Artificial Intelligence vol 23 no 2pp 283ndash289 2010
[11] T Sardarmehni J Keighobadi M B Menhaj and H RahmanildquoRobust predictive control of lambda in internal combustionengines using neural networksrdquo Archives of Civil and Mechani-cal Engineering vol 13 no 4 pp 432ndash443 2013
10 Mathematical Problems in Engineering
[12] P K Wong H C Wong C M Vong Z Xie and SHuang ldquoModel predictive engine air-ratio control using onlinesequential extreme learning machinerdquo Neural Computing andApplications 2014
[13] P K Wong L M Tam K Li and C M Vong ldquoEngine idle-speed system modelling and control optimization using arti-ficial intelligencerdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 224no 1 pp 55ndash72 2010
[14] Y-W Kim G Rizzoni and V I Utkin ldquoDeveloping a faulttolerant power-train control system by integrating design ofcontrol and diagnosticsrdquo International Journal of Robust andNonlinear Control vol 11 no 11 pp 1095ndash1114 2001
[15] E Gassenfeit and J Powell ldquoAlgorithms for air-fuel ratioestimation using internal combustion engine cylinder pressurerdquoSAE Technical Paper 890300 1989
[16] J R Asik G M Meyer and D X Tang ldquoAF ratio estimationand control based on induced engine roughnessrdquo IEEE ControlSystems Magazine vol 16 no 6 pp 35ndash42 1996
[17] G-B Huang ldquoAn insight into extreme learning machinesrandom neurons random features and kernelsrdquo CognitiveComputation vol 6 no 3 pp 376ndash390 2014
[18] K I Wong P K Wong C S Cheung and C M Vong ldquoMod-elling of diesel engine performance using advanced machinelearning methods under scarce and exponential data setrdquoApplied Soft Computing vol 13 no 11 pp 4428ndash4441 2013
[19] J W Cao Z P Lin G-B Huang and N Liu ldquoVoting basedextreme learning machinerdquo Information Sciences vol 185 pp66ndash77 2012
[20] I Lou Z Xie W K Ung and K M Mok ldquoFreshwateralgal bloom prediction by extreme learning machine in MacauStorage Reservoirsrdquo Neural Computing and Applications 2014
[21] J Cao and L Xiong ldquoProtein sequence classification withimproved extreme learning machine algorithmsrdquo BioMedResearch International vol 2014 Article ID 103054 12 pages2014
[22] P K Wong K I Wong C M Vong and C S CheungldquoModeling and optimization of biodiesel engine performanceusing kernel-based extreme learning machine and cuckoosearchrdquo Renewable Energy vol 74 pp 640ndash647 2015
[23] T R Chandrupatla ldquoAn efficient quadratic fitmdashsectioningalgorithm for minimization without derivativesrdquo ComputerMethods in Applied Mechanics and Engineering vol 152 no 1-2 pp 211ndash217 1998
[24] W W Pulkrabek Engineering Fundamentals of the InternalCombustion Engine Pearson Prentice Hall 2nd edition 2004
[25] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[26] G Y Li Application of Intelligent Control and MATLAB to Elec-tronically Controlled Engines Publishing House of ElectronicsIndustry Beijing China 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
and 119905119894as the target scalar output a single-hidden-layer
feedforward network with 119871 hidden nodes can be written as
119871
sum
119896=1
120573119896ℎ119896(x119894) = h (x
119894)120573 = 119905
119894 119894 = 1 119873 (1)
where h(x119894) = [ℎ1(x119894) ℎ119871(x119894)] is the feature mapping out-
put with respect to x119894and 120573 = [1205731 120573119871]
119879 is the outputweight vector In kernel-based ELM this weight vector isdetermined by minimizing both the norm of the weight vec-tor and the training error The corresponding optimizationproblem is
Minimize 1210038171003817100381710038171205731003817100381710038171003817
2+ 119862
12
119873
sum
119894=1
10038171003817100381710038171205791198941003817100381710038171003817
2
Subject to 120579119894= 119905119894minus h (x
119894)120573 119894 = 1 119873
(2)
where 119862 is a user-specified penalty term for regularizationpurpose
Then based on the Karush-Kuhn-Tucker theorem opti-mizing (2) is equal to solving the following dual optimizationproblem
LELM =1210038171003817100381710038171205731003817100381710038171003817
2+ 119862
12
119873
sum
119894=1
10038171003817100381710038171205791198941003817100381710038171003817
2
minus
119873
sum
119894=1120572119894(h (x119894)120573 minus 119905
119894+ 120579119894)
(3)
where 120572119894is the Lagrange multiplier
By taking derivatives on (3) the following conditions areobtained
120597LELM120597120573
= 0 997888rarr 120573 =119873
sum
119894=1120572119894h (x119894)119879997888rarr 120573 = H119879120572
120597LELM120597120579119894
= 0 997888rarr 120572119894= 119862120579119894 119894 = 1 119873
120597LELM120597120572119894
= 0 997888rarr h (x119894)120573 minus 119905
119894+ 120579119894= 0 119894 = 1 119873
(4)
where
120572 = [1205721 120572119873]119879 H = [[
[
ℎ1 (x1) sdot sdot sdot ℎ119871(x1)
d
ℎ1 (x119873) sdot sdot sdot ℎ119871 (x119873)
]]
]119873times119871
(5)
By combining the conditions in (4) and eliminating theLagrange multipliers 120572
119894 the optimal weight vector could be
calculated as
120573 = H119879( I119862+HH119879)
minus1T (6)
where T = [1199051 119905119873]119879 and I is the identity matrix
With (6) the output function of the network for anunknown input X becomes
119891 (X) = h (X)H119879( I119862+HH119879)
minus1T (7)
Finally by defining a kernel matrix satisfying Mercerrsquosconditions as
ΩELM = HH119879 ΩELM119886119887 = ℎ (x119886) sdot ℎ (x119887)
= 119870 (x119886 x119887)
(8)
(7) becomes
119891 (X) = [[[
119870 (X x1)
119870 (X x119873)
]]
]
119879
(I119862+ΩELM)
minus1
T (9)
In this study the function 119891(X) is the supplementary air-ratio model
3 Supplementary Air-Ratio Model
31 Model Construction The objective of the ELM supple-mentary air-ratio model is to predict the future air-ratio119910119901when the lambda sensor is under failure or during cold
start Previous air-ratio measurementmust not be used as theinputs to the model Three engine parameters related closelyto the air-ratio performance were carefully selected as themodel inputs fuel injection time (FI) engine speed (ES) andthrottle position (TP) The order of the system dynamics waschosen to be 2 (ie second-order system with 2 past timesteps) which gives the minimum prediction error [12] Thestructure of the supplementary air-ratio model is shown inFigure 1
To build the supplementary air-ratiomodel experimentalengine data was used rather than empirical equation dataA Honda DC5 Type-R test car with K20A i-VTEC enginewas employed to perform the experiment A MoTeC M800programmable electronic control unit (ECU) with factorycalibration data was used as a base controller to control theengine The car was run over a dyno test and totally 5800data samples were acquired using a wide-band lambda sensorsubject to random throttle positions The first 3000 datasamples were used as the training dataset D to build thesupplementary air-ratio model The last 2800 data sampleswere used as the test dataset Dt to evaluate the generaliza-tion of the built supplementary air-ratio model After train-ing the output function of the ELM supplementary modelfor an unseen case can be written in the following form
119910119901=[[
[
119870 (X x1)
119870 (X x119873)
]]
]
119879
(I119862+ΩELM)
minus1
T (10)
where xT isin D are the training data 119910119901is the prediction
output vector X is the unseen input vector 119870(x119886 x119887) =
exp(minusx119886minus x119887221205902) is the selected radial basis function
4 Mathematical Problems in Engineering
Supplementary air-ratio model
FI (t minus 2)
FI (t minus 1)
ES (t minus 2)
ES (t minus 1)
TP (t minus 2)
TP (t minus 1)
yp (t)
Figure 1 Structure of the ELM supplementary air-ratio model
Table 1 Accuracy of different air-ratio models
Air-ratio model LMAESupplementary air-ratio model 18559Air-ratio model obtained from [12] 22424
kernel I is the identity matrix and 119862 is the user-specifiedpenalty term The hyperparameters of 1205902 and 119862 in thekernel-based ELM were tuned by using the hybrid inferenceintroduced in [18] which combined leave-one-out crossvalidation and Bayesian inference The details can be foundin [18]
32 Evaluation of Engine Air-Ratio Model To evaluate theproposed ELM supplementary air-ratio model its predictionresult was compared with the air-ratio model obtained from[12] which is a time-series model with the air-ratio historiesas the input The performance of the models is evaluated interms of prediction accuracy for unseen case from Dt Theprediction results of the two air-ratio models over Dt areshown in Figure 2
From Figure 2 it can be seen that both models achievecomparative performance To further evaluate the predictionaccuracy the logarithmic mean absolute error (LMAE) forthe prediction of each model is determined using the follow-ing equation
LMAE = minus log[ 1119879
119879
sum
119896=1
10038161003816100381610038161003816119910119896minus 119910119901
10038161003816100381610038161003816] (11)
where 119910119901is the model prediction value corresponding to X
119896
119910119896is the actual experimental value corresponding to X
119896 and
119879 is total number of predictions from Dt which is 2800 inthis case study The larger the LMAE is the higher the modelaccuracy is The evaluation results are provided in Table 1
The prediction results from Table 1 show that the predic-tion accuracy of the proposed ELM supplementary air-ratiomodel is lower than that of the air-ratio model obtained from[12] It has to be noted that the dynamics of previous air-ratio measurement (ie 119910
119901(119905 minus 1) 119910
119901(119905 minus 2)) are not included
in the construction of the supplementary air-ratio model Itis reasonable that the prediction accuracy is not as good asthe one using these previous air-ratio histories However theaccuracy is still acceptable so ELM was confidently selectedto implement the FTC in this study
070
080
090
100
110
0 400 800 1200 1600 2000 2400 2800
Air-
ratio
Supplementary modelModel from (Wong et al 2014)
Actual air-ratio
Sample (k)
Figure 2 Comparison between predicted air-ratios and the corre-sponding actual air-ratios
4 MPC Based Fault ToleranceController (FTC)
The proposed FTC can be viewed as an improved version ofthe OEMPC from [12] Its aim is to maintain the engine air-ratio control performance when the lambda sensor is underfailureThe design of the proposed FTC is shown in Figure 3
The FTC consists of two air-ratio models including theone from [12] and the supplementary air-ratio model fromSection 3 a switch toggling between these two models andan optimizer based on Brentrsquos method [12 23] The engineresponse over a specified time horizon is predicted by eitherthe air-ratio model from [12] or the supplementary air-ratiomodel depending on the condition of the lambda sensorAs far as the lambda sensor works well the engine responseis predicted by the air-ratio model from [12] Normally thelambda value for a combustible mixture is in the range of04 to 3 [24] When the lambda measured is out of thisrange for a firing engine it means that the lambda sensor isunder failure or during cold start In this situation the engineresponse is predicted by the supplementary air-ratio modelThe predictions are used by the optimizer to determine thetentative fuel injection time 1199061015840 that minimizes the followingperformance criterion over the specified time horizon andthen the optimal fuel injection time signal 119906 is sent to theengine
min 119869 (1199061015840) =1198732
sum
119895=1198731
(119910119903(119905 + 119895) minus 119910
119901(119905 + 119895))
2
+ 120588
119873119906
sum
119895=1
(1199061015840(119905 + 119895 minus 1) minus 119906
1015840(119905 + 119895 minus 2))
2
(12)
where1198731and119873
2define the prediction horizon 119905 and119873
119906are
the time step and the control horizon respectively 119910119903(119905 + 119895)
is the target air-ratio at the time step 119905 + 119895 119910119901is the predicted
air-ratio by either of the two air-ratio models at the time step119905+119895 and 120588 is a user-defined weight which penalizes excessive
Mathematical Problems in Engineering 5
Optimizer(Brentrsquos method)
Supplementary air-ratio model
from (Wong et al 2014)
Real engine
Tentative fuel injection time
Optimized fuel injection time
Actual air-ratio
Yes
Model predicted air-ratio
No
Prediction and optimization loop Time history signal
Target air-ratioyr
yp
u998400
yt
Air-ratio model
u
Engine signal (eg throttle position)
Does lambda sensorwork (ie 04 le yt le 3)
Figure 3 Structure of FTC for engine air-ratio control
movement of the control signal (ie the fuel injection time)The variables 1199061015840(119905 + 119895 minus 1) and 1199061015840(119905 + 119895 minus 2) in the secondpart of (12) are the tentative fuel injection time at the timesteps 119905 + 119895 minus 1 and 119905 + 119895 minus 2 respectively The second partof (12) can ensure the stability of the controller output [12]Moreover the stability of MPC strategy has also been provedin [25 26] so the stability of the proposed control schemecould be guaranteed In short the proposed control scheme inFigure 3 can provide both regular and fault tolerance controlof engine air-ratio
41 Single Dimension Optimization Approach The originaloptimization problem involved in this paper is multidimen-sional and constrained with the tentative control signals1199061015840(119905) 1199061015840(119905 + 1) 119906
1015840(119905 + 119873
119906minus 1) over the control horizon
119873119906which can minimize the objective function 119869(1199061015840) of
(12) Then the predicted air-ratios 119910119901(119905 + 119873
1) 119910119901(119905 + 119873
1+
1) 119910119901(119905 + 119873
2) can trace the target air-ratios 119910
119903(119905 +
1198731) 119910119903(119905 + 119873
1+ 1) 119910
119903(119905 + 119873
2) by using the optimized
fuel injection time-series Each fuel injection time is normallybounded within the range from 2ms to 15ms Howeverthe multidimensional optimization always requires heavycomputation especially when constraints exist Real-timecontrol applications often put emphasis on computationalspeed The research of [10] showed that the one-dimensionalapproach is efficient for real-time air-ratio control and theoverall tracking error is similar to that using multidimen-sional optimization approach Therefore the optimizationproblem to be solved is reduced to one dimension In thispaper the control signal 119906 is assumed to remain constant overthe control horizon Therefore the tentative control signalin the objective function is also constant over the controlhorizon that is 1199061015840(119905) = 1199061015840(119905 + 1) = 1199061015840(119905 +119873
119906minus 1) In this
way only one parameter1199061015840(119905) is needed to be determined andthe final fuel injection time at each time step 119906 is set to be theoptimal value of 1199061015840(119905)
42 Brentrsquos Method There are many optimization techniquesavailable for MPC and each technique has its pros and consA well-known techniquemdashBrentrsquos methodmdashwas selected asthe MPC optimizer in this study for illustrative purposeBrentrsquos method is a robust and efficient optimizationmethodIt combines the typical parabolic interpolation and golden-section search The objective function in each iteration isapproximated by interpolating a parabola through threeexisting points The minimum point of the parabola is takenas a guess for the minimum point if certain criteria aremet Otherwise golden-section search is carried out Theadvantage of this method is that the high convergence rateof parabolic interpolation can be maintained without losingthe robustness of golden-section search [23] The generalworking principle of Brentrsquos method is shown in Figure 4The detail optimization procedure of Brentrsquos method waspresented in [23] and is not presented herein There arethree parameters of Brentrsquos method including the initialinterval of the input variable [119886 119887] (ie the limit of the fuelinjection time) the tolerance tol and themaximum iterationfor stopping the optimization procedure The three variableswere set to be [2 15] 005 and 50 respectively because thefuel injection time varies within 2 to 15ms from 0 to 100throttle
5 Implementation and Evaluation of FTC
51 Experimental Setup To verify its effectiveness the pro-posed FTC was implemented and tested on the same test
6 Mathematical Problems in Engineering
Parabolic interpolation
Start
Yes No
Golden-section search
Output
Yes
No
|J(u998400k+1) minus J(u
998400k)| lt 05 times min (|u
998400k minus a| |b minus u
998400k|)
|u998400k+1 minus u
998400k| lt tol or over maximum iteration
Figure 4 General working principle of Brentrsquos method
car used for sample data collection in Section 3 (HondaDC5 Type-R with K20A i-VTEC engine and MoTeC M800programmable ECU) The algorithm of FTC was first imple-mented using MATLAB A National Instrument (NI) Com-pactDAQ chassis DAQ-9178 was then employed for signalprocessing between the MATLAB program and the MoTeCECU via NI LabVIEW program In other words NI DAQ-9178 serves as an interface between the MATLAB programand the MoTeC ECU Apart from fuel injector control theMoTeC ECU also contains many basic control maps suchas ignition map and valve timing map to maintain theengine operationThe experimental setup and the signal flowbetween the test car and FTC are shown in Figure 5
52 Pilot Test-Tracking Ability To evaluate the tracking per-formance of the proposed FTC a pilot test was carried outThe test was done under the condition that the lambda sensoris already malfunctioning (ie the supplementary air-ratiomodel in the FTC is used) The test cycle for the pilot testis shown in Figure 6 where the throttle position graduallychanges from 15 to 75 throttle (the throttle positionincreases by 15 every 5 s) Such test cycle is designed byreferring to [10] which almost covers the whole operatingcondition In this test the air-ratio is required to trackthe target air-ratios from the stoichiometric value (100) forminimum emissions to a value for the best brake-specificfuel consumption (105) and then to a value for maximumengine power (095) as the throttle position is graduallychanged from 15 to 75 throttle Such tracking of air-ratiochanges is essential for automobiles to satisfy the emissionfuel consumption and power requirements under differentoperating conditions [6]
After choosing the sampling time to be 001 s the trackingability of the FTC was examined By trial-and-error theparameters of the optimizer were chosen as119873
1= 1119873
2= 8
120588 = 075 and 119873119906= 5 With the test cycle shown in Fig-
ure 6 and the parameters chosen the air-ratio control resultand the corresponding fuel injection time of the FTC areshown in Figure 7 It can be seen from Figure 7 that the FTCcan regulate the air-ratio to follow the target air-ratios withacceptable deviation even when the lambda sensor is underfailure
To further verify the result three tests were done Thefirst one was conducted under the condition that the lambdasensor did not work and traditional air-ratio controller (iefactory lookup table) was employed The other two werecarried out under the condition that the lambda sensor couldwork well and a diagonal recurrent neural-network modelpredictive controller (DNMPC) which is a recent air-ratiocontrol algorithm applicable when the lambda sensor worksnormally [10] was employed along with the proposed FTCfor comparison purpose The air-ratio control results and thecorresponding fuel injection time of the three tests are shownin Figures 8 9 and 10 respectively
When comparing Figure 8 to Figure 7 it is obvious thatthe proposed FTC outperforms traditional air-ratio controlsystemwhen the lambda sensor does not work Furthermoreby comparing Figures 9 and 10 it can be seen that theproposed FTC can perform slightly better than the DNMPCwhen the lambda sensor works properly Finally comparingFigure 10 to Figure 7 it can be learnt that the proposed FTCcan achieve better performance when the lambda sensor isunder normal conditionThis is not surprising because whenthe lambda sensor works well the air-ratio model from [12]which has better prediction capability is utilized resulting in
Mathematical Problems in Engineering 7
Optimizer(Brentrsquos
method)Supplementaryair-ratio model
Air-ratio model from
Real air-ratio
lambda sensor
YesDoes lambda sensor work
FTC work flow
Test car
Sensor signals
Control signal
MoTeC M800 ECU
NI DAQ-9178
LabVIEW interfaceprogram
(ie 04 le yt le 3)
yt measured by
(Wong et al 2014)
Figure 5 Experimental setup and signal flow between test car and FTC
102030405060708090
0 5 10 15 20 25
Thro
ttle p
ositi
on (
)
Time (s)
Figure 6 Test cycle throttle position versus time
better control performance For comparison purpose LMAEis again chosen as the tracking index (TI) to evaluate thetracking ability of the controllers defined by
TI = minus log[ 1119879119904
119879119904
sum
119896=1
1003816100381610038161003816119910119905 minus 119910119903 (119905)1003816100381610038161003816]
(13)
where 119905 is time step 119879119904is the total number of time step in
the test 119910119905is the actual air-ratio at each time step and 119910
119903(119905) is
the corresponding target air-ratio at each time stepThe targetair-ratio varies according to the aforesaid practical operating
Table 2 Performance of different controllers for the pilot test
Controller Lambda sensor TI Maximum overshootFTC Under failure 21022 01188Traditional system Under failure 16244 01235DNMPC Normal 22896 01267FTC Normal 23309 01074
conditionsThe corresponding results under different lambdasensor conditions are shown in Table 2
The results in Table 2 show that even when the lambdasensor is under failure the control performance of the FTCcan still maintain about 90 of that under normal lambdasensor condition Table 2 also shows that the performanceof the proposed FTC under sensor failure is similar to thatof DNMPC The reason may be that the accuracy of theELM supplementary model is similar to that of the time-series diagonal neural-network model in [10] Moreover ascompared to traditional air-ratio control system (ie factorylookup table) the proposed FTC can improve the air-ratiocontrol performance at about 30 when the lambda sensoris under failure indicating that the overall air-ratio controlperformance of the FTC is satisfactory
Air-ratio model prediction accuracy is one of the mostimportant factors affecting the control performance of
8 Mathematical Problems in Engineering
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 7 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under lambda sensor failure
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 8 (a) Air-ratio control results and (b) corresponding fuel injection time of traditional air-ratio control system under lambda sensorfailure (ie using factory lookup table only)
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 9 (a) Air-ratio control results and (b) corresponding fuel injection time of DNMPC under normal lambda sensor condition
the model predictive controllers Therefore as the air-ratiomeasurement cannot be provided for model prediction whenthe lambda sensor is under failure degrading of the air-ratiocontrol performance is unavoidable Thankfully with the
proposed ELM supplementary air-ratio model the controlperformance can still be maintained at an acceptable rangeThis implies that the proposed model and control strategy isfeasible
Mathematical Problems in Engineering 9
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 10 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under normal lambda sensor condition
6 Conclusions
In this study a supplementary air-ratio model was con-structed using kernel-based ELM in which the air-ratio timehistories were not included in the model input The purposeof the model is to predict the future air-ratio dynamics whenthe previous air-ratio measurement is unavailable With thesupplementary air-ratio model a FTC for engine air-ratiocontrol was developed as the first attempt in the literature Intraditional case the lambda sensor is assumed to work prop-erly so traditional air-ratio control system may not performwell when the lambda sensor is malfunctioningThe purposeof the proposed FTC is to maintain the air-ratio controlperformance even when the lambda sensor is under failureor during cold start
To evaluate its performance the proposed FTC was suc-cessfully implemented and tested on a real automotive engineExperimental results show that when the lambda sensor doesnot work well the air-ratio control performance of the FTCcan be effectively maintained over 90 of that under normallambda sensor condition Therefore the FTC is a promisingbackup engine air-ratio control strategy In other words theproposed control scheme in Figure 3 is very suitable toimplement in the automotive ECU to provide both regularand fault tolerance control of engine air-ratio
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is supported by the University of MacauResearch Grant (Grant nos MYRG2014-00178-FST andMYRG075(Y1-L2)-FST13-VCM) The research is also sup-ported by the Science and Technology Development Fund ofMacau (Grant no FDCT0752013A)
References
[1] J Heinrich P E Schwarze N Stilianakis et al Health Effectsof Transport-Related Air Pollution World Health Organization2005
[2] S S Lim T Vos A D Flaxman et al ldquoA comparative riskassessment of burden of disease and injury attributable to 67risk factors and risk factor clusters in 21 regions 1990ndash2010a systematic analysis for the Global Burden of Disease Study2010rdquoThe Lancet vol 380 no 9859 pp 2224ndash2260 2010
[3] S H L Yim and S R H Barrett ldquoPublic health impacts ofcombustion emissions in the United Kingdomrdquo EnvironmentalScience amp Technology vol 46 no 8 pp 4291ndash4296 2012
[4] K Zhang and S Batterman ldquoAir pollution and health risks dueto vehicle trafficrdquo Science of the Total Environment vol 450-451pp 307ndash316 2013
[5] J B Heywood Internal Combustion Engine FundamentalsMcGraw-Hill New York NY USA 1988
[6] T Gilles Automotive Service Inspection Maintenance RepairCengage Learning 2011
[7] S Pace and G G Zhu ldquoSliding mode control of both air-to-fuel and fuel ratios for a dual-fuel internal combustion enginerdquoJournal of Dynamic Systems Measurement and Control vol 134no 3 Article ID 031012 2012
[8] R Tafreshi B Ebrahimi J Mohammadpour M A FranchekK Grigoriadis and H Masudi ldquoLinear dynamic parameter-varying sliding manifold for air-fuel ratio control in lean-burnenginesrdquo IET Control Theory amp Applications vol 7 no 10 pp1319ndash1329 2013
[9] B Ebrahimi R Tafreshi H Masudi M Franchek J Moham-madpour andKGrigoriadis ldquoAparameter-varying filtered PIDstrategy for air-fuel ratio control of spark ignition enginesrdquoControl Engineering Practice vol 20 no 8 pp 805ndash815 2012
[10] Y-J Zhai D-W Yu H-Y Guo and D L Yu ldquoRobust airfuelratio control with adaptive DRNN model and AD tuningrdquoEngineering Applications of Artificial Intelligence vol 23 no 2pp 283ndash289 2010
[11] T Sardarmehni J Keighobadi M B Menhaj and H RahmanildquoRobust predictive control of lambda in internal combustionengines using neural networksrdquo Archives of Civil and Mechani-cal Engineering vol 13 no 4 pp 432ndash443 2013
10 Mathematical Problems in Engineering
[12] P K Wong H C Wong C M Vong Z Xie and SHuang ldquoModel predictive engine air-ratio control using onlinesequential extreme learning machinerdquo Neural Computing andApplications 2014
[13] P K Wong L M Tam K Li and C M Vong ldquoEngine idle-speed system modelling and control optimization using arti-ficial intelligencerdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 224no 1 pp 55ndash72 2010
[14] Y-W Kim G Rizzoni and V I Utkin ldquoDeveloping a faulttolerant power-train control system by integrating design ofcontrol and diagnosticsrdquo International Journal of Robust andNonlinear Control vol 11 no 11 pp 1095ndash1114 2001
[15] E Gassenfeit and J Powell ldquoAlgorithms for air-fuel ratioestimation using internal combustion engine cylinder pressurerdquoSAE Technical Paper 890300 1989
[16] J R Asik G M Meyer and D X Tang ldquoAF ratio estimationand control based on induced engine roughnessrdquo IEEE ControlSystems Magazine vol 16 no 6 pp 35ndash42 1996
[17] G-B Huang ldquoAn insight into extreme learning machinesrandom neurons random features and kernelsrdquo CognitiveComputation vol 6 no 3 pp 376ndash390 2014
[18] K I Wong P K Wong C S Cheung and C M Vong ldquoMod-elling of diesel engine performance using advanced machinelearning methods under scarce and exponential data setrdquoApplied Soft Computing vol 13 no 11 pp 4428ndash4441 2013
[19] J W Cao Z P Lin G-B Huang and N Liu ldquoVoting basedextreme learning machinerdquo Information Sciences vol 185 pp66ndash77 2012
[20] I Lou Z Xie W K Ung and K M Mok ldquoFreshwateralgal bloom prediction by extreme learning machine in MacauStorage Reservoirsrdquo Neural Computing and Applications 2014
[21] J Cao and L Xiong ldquoProtein sequence classification withimproved extreme learning machine algorithmsrdquo BioMedResearch International vol 2014 Article ID 103054 12 pages2014
[22] P K Wong K I Wong C M Vong and C S CheungldquoModeling and optimization of biodiesel engine performanceusing kernel-based extreme learning machine and cuckoosearchrdquo Renewable Energy vol 74 pp 640ndash647 2015
[23] T R Chandrupatla ldquoAn efficient quadratic fitmdashsectioningalgorithm for minimization without derivativesrdquo ComputerMethods in Applied Mechanics and Engineering vol 152 no 1-2 pp 211ndash217 1998
[24] W W Pulkrabek Engineering Fundamentals of the InternalCombustion Engine Pearson Prentice Hall 2nd edition 2004
[25] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[26] G Y Li Application of Intelligent Control and MATLAB to Elec-tronically Controlled Engines Publishing House of ElectronicsIndustry Beijing China 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
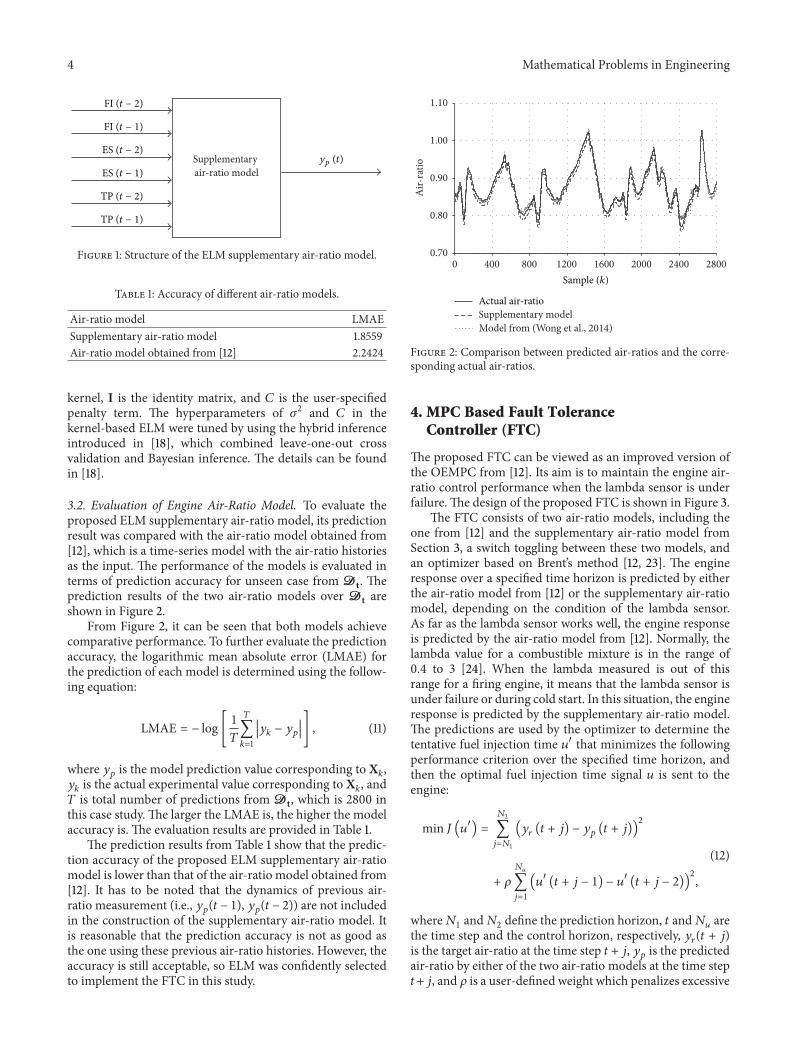
4 Mathematical Problems in Engineering
Supplementary air-ratio model
FI (t minus 2)
FI (t minus 1)
ES (t minus 2)
ES (t minus 1)
TP (t minus 2)
TP (t minus 1)
yp (t)
Figure 1 Structure of the ELM supplementary air-ratio model
Table 1 Accuracy of different air-ratio models
Air-ratio model LMAESupplementary air-ratio model 18559Air-ratio model obtained from [12] 22424
kernel I is the identity matrix and 119862 is the user-specifiedpenalty term The hyperparameters of 1205902 and 119862 in thekernel-based ELM were tuned by using the hybrid inferenceintroduced in [18] which combined leave-one-out crossvalidation and Bayesian inference The details can be foundin [18]
32 Evaluation of Engine Air-Ratio Model To evaluate theproposed ELM supplementary air-ratio model its predictionresult was compared with the air-ratio model obtained from[12] which is a time-series model with the air-ratio historiesas the input The performance of the models is evaluated interms of prediction accuracy for unseen case from Dt Theprediction results of the two air-ratio models over Dt areshown in Figure 2
From Figure 2 it can be seen that both models achievecomparative performance To further evaluate the predictionaccuracy the logarithmic mean absolute error (LMAE) forthe prediction of each model is determined using the follow-ing equation
LMAE = minus log[ 1119879
119879
sum
119896=1
10038161003816100381610038161003816119910119896minus 119910119901
10038161003816100381610038161003816] (11)
where 119910119901is the model prediction value corresponding to X
119896
119910119896is the actual experimental value corresponding to X
119896 and
119879 is total number of predictions from Dt which is 2800 inthis case study The larger the LMAE is the higher the modelaccuracy is The evaluation results are provided in Table 1
The prediction results from Table 1 show that the predic-tion accuracy of the proposed ELM supplementary air-ratiomodel is lower than that of the air-ratio model obtained from[12] It has to be noted that the dynamics of previous air-ratio measurement (ie 119910
119901(119905 minus 1) 119910
119901(119905 minus 2)) are not included
in the construction of the supplementary air-ratio model Itis reasonable that the prediction accuracy is not as good asthe one using these previous air-ratio histories However theaccuracy is still acceptable so ELM was confidently selectedto implement the FTC in this study
070
080
090
100
110
0 400 800 1200 1600 2000 2400 2800
Air-
ratio
Supplementary modelModel from (Wong et al 2014)
Actual air-ratio
Sample (k)
Figure 2 Comparison between predicted air-ratios and the corre-sponding actual air-ratios
4 MPC Based Fault ToleranceController (FTC)
The proposed FTC can be viewed as an improved version ofthe OEMPC from [12] Its aim is to maintain the engine air-ratio control performance when the lambda sensor is underfailureThe design of the proposed FTC is shown in Figure 3
The FTC consists of two air-ratio models including theone from [12] and the supplementary air-ratio model fromSection 3 a switch toggling between these two models andan optimizer based on Brentrsquos method [12 23] The engineresponse over a specified time horizon is predicted by eitherthe air-ratio model from [12] or the supplementary air-ratiomodel depending on the condition of the lambda sensorAs far as the lambda sensor works well the engine responseis predicted by the air-ratio model from [12] Normally thelambda value for a combustible mixture is in the range of04 to 3 [24] When the lambda measured is out of thisrange for a firing engine it means that the lambda sensor isunder failure or during cold start In this situation the engineresponse is predicted by the supplementary air-ratio modelThe predictions are used by the optimizer to determine thetentative fuel injection time 1199061015840 that minimizes the followingperformance criterion over the specified time horizon andthen the optimal fuel injection time signal 119906 is sent to theengine
min 119869 (1199061015840) =1198732
sum
119895=1198731
(119910119903(119905 + 119895) minus 119910
119901(119905 + 119895))
2
+ 120588
119873119906
sum
119895=1
(1199061015840(119905 + 119895 minus 1) minus 119906
1015840(119905 + 119895 minus 2))
2
(12)
where1198731and119873
2define the prediction horizon 119905 and119873
119906are
the time step and the control horizon respectively 119910119903(119905 + 119895)
is the target air-ratio at the time step 119905 + 119895 119910119901is the predicted
air-ratio by either of the two air-ratio models at the time step119905+119895 and 120588 is a user-defined weight which penalizes excessive
Mathematical Problems in Engineering 5
Optimizer(Brentrsquos method)
Supplementary air-ratio model
from (Wong et al 2014)
Real engine
Tentative fuel injection time
Optimized fuel injection time
Actual air-ratio
Yes
Model predicted air-ratio
No
Prediction and optimization loop Time history signal
Target air-ratioyr
yp
u998400
yt
Air-ratio model
u
Engine signal (eg throttle position)
Does lambda sensorwork (ie 04 le yt le 3)
Figure 3 Structure of FTC for engine air-ratio control
movement of the control signal (ie the fuel injection time)The variables 1199061015840(119905 + 119895 minus 1) and 1199061015840(119905 + 119895 minus 2) in the secondpart of (12) are the tentative fuel injection time at the timesteps 119905 + 119895 minus 1 and 119905 + 119895 minus 2 respectively The second partof (12) can ensure the stability of the controller output [12]Moreover the stability of MPC strategy has also been provedin [25 26] so the stability of the proposed control schemecould be guaranteed In short the proposed control scheme inFigure 3 can provide both regular and fault tolerance controlof engine air-ratio
41 Single Dimension Optimization Approach The originaloptimization problem involved in this paper is multidimen-sional and constrained with the tentative control signals1199061015840(119905) 1199061015840(119905 + 1) 119906
1015840(119905 + 119873
119906minus 1) over the control horizon
119873119906which can minimize the objective function 119869(1199061015840) of
(12) Then the predicted air-ratios 119910119901(119905 + 119873
1) 119910119901(119905 + 119873
1+
1) 119910119901(119905 + 119873
2) can trace the target air-ratios 119910
119903(119905 +
1198731) 119910119903(119905 + 119873
1+ 1) 119910
119903(119905 + 119873
2) by using the optimized
fuel injection time-series Each fuel injection time is normallybounded within the range from 2ms to 15ms Howeverthe multidimensional optimization always requires heavycomputation especially when constraints exist Real-timecontrol applications often put emphasis on computationalspeed The research of [10] showed that the one-dimensionalapproach is efficient for real-time air-ratio control and theoverall tracking error is similar to that using multidimen-sional optimization approach Therefore the optimizationproblem to be solved is reduced to one dimension In thispaper the control signal 119906 is assumed to remain constant overthe control horizon Therefore the tentative control signalin the objective function is also constant over the controlhorizon that is 1199061015840(119905) = 1199061015840(119905 + 1) = 1199061015840(119905 +119873
119906minus 1) In this
way only one parameter1199061015840(119905) is needed to be determined andthe final fuel injection time at each time step 119906 is set to be theoptimal value of 1199061015840(119905)
42 Brentrsquos Method There are many optimization techniquesavailable for MPC and each technique has its pros and consA well-known techniquemdashBrentrsquos methodmdashwas selected asthe MPC optimizer in this study for illustrative purposeBrentrsquos method is a robust and efficient optimizationmethodIt combines the typical parabolic interpolation and golden-section search The objective function in each iteration isapproximated by interpolating a parabola through threeexisting points The minimum point of the parabola is takenas a guess for the minimum point if certain criteria aremet Otherwise golden-section search is carried out Theadvantage of this method is that the high convergence rateof parabolic interpolation can be maintained without losingthe robustness of golden-section search [23] The generalworking principle of Brentrsquos method is shown in Figure 4The detail optimization procedure of Brentrsquos method waspresented in [23] and is not presented herein There arethree parameters of Brentrsquos method including the initialinterval of the input variable [119886 119887] (ie the limit of the fuelinjection time) the tolerance tol and themaximum iterationfor stopping the optimization procedure The three variableswere set to be [2 15] 005 and 50 respectively because thefuel injection time varies within 2 to 15ms from 0 to 100throttle
5 Implementation and Evaluation of FTC
51 Experimental Setup To verify its effectiveness the pro-posed FTC was implemented and tested on the same test
6 Mathematical Problems in Engineering
Parabolic interpolation
Start
Yes No
Golden-section search
Output
Yes
No
|J(u998400k+1) minus J(u
998400k)| lt 05 times min (|u
998400k minus a| |b minus u
998400k|)
|u998400k+1 minus u
998400k| lt tol or over maximum iteration
Figure 4 General working principle of Brentrsquos method
car used for sample data collection in Section 3 (HondaDC5 Type-R with K20A i-VTEC engine and MoTeC M800programmable ECU) The algorithm of FTC was first imple-mented using MATLAB A National Instrument (NI) Com-pactDAQ chassis DAQ-9178 was then employed for signalprocessing between the MATLAB program and the MoTeCECU via NI LabVIEW program In other words NI DAQ-9178 serves as an interface between the MATLAB programand the MoTeC ECU Apart from fuel injector control theMoTeC ECU also contains many basic control maps suchas ignition map and valve timing map to maintain theengine operationThe experimental setup and the signal flowbetween the test car and FTC are shown in Figure 5
52 Pilot Test-Tracking Ability To evaluate the tracking per-formance of the proposed FTC a pilot test was carried outThe test was done under the condition that the lambda sensoris already malfunctioning (ie the supplementary air-ratiomodel in the FTC is used) The test cycle for the pilot testis shown in Figure 6 where the throttle position graduallychanges from 15 to 75 throttle (the throttle positionincreases by 15 every 5 s) Such test cycle is designed byreferring to [10] which almost covers the whole operatingcondition In this test the air-ratio is required to trackthe target air-ratios from the stoichiometric value (100) forminimum emissions to a value for the best brake-specificfuel consumption (105) and then to a value for maximumengine power (095) as the throttle position is graduallychanged from 15 to 75 throttle Such tracking of air-ratiochanges is essential for automobiles to satisfy the emissionfuel consumption and power requirements under differentoperating conditions [6]
After choosing the sampling time to be 001 s the trackingability of the FTC was examined By trial-and-error theparameters of the optimizer were chosen as119873
1= 1119873
2= 8
120588 = 075 and 119873119906= 5 With the test cycle shown in Fig-
ure 6 and the parameters chosen the air-ratio control resultand the corresponding fuel injection time of the FTC areshown in Figure 7 It can be seen from Figure 7 that the FTCcan regulate the air-ratio to follow the target air-ratios withacceptable deviation even when the lambda sensor is underfailure
To further verify the result three tests were done Thefirst one was conducted under the condition that the lambdasensor did not work and traditional air-ratio controller (iefactory lookup table) was employed The other two werecarried out under the condition that the lambda sensor couldwork well and a diagonal recurrent neural-network modelpredictive controller (DNMPC) which is a recent air-ratiocontrol algorithm applicable when the lambda sensor worksnormally [10] was employed along with the proposed FTCfor comparison purpose The air-ratio control results and thecorresponding fuel injection time of the three tests are shownin Figures 8 9 and 10 respectively
When comparing Figure 8 to Figure 7 it is obvious thatthe proposed FTC outperforms traditional air-ratio controlsystemwhen the lambda sensor does not work Furthermoreby comparing Figures 9 and 10 it can be seen that theproposed FTC can perform slightly better than the DNMPCwhen the lambda sensor works properly Finally comparingFigure 10 to Figure 7 it can be learnt that the proposed FTCcan achieve better performance when the lambda sensor isunder normal conditionThis is not surprising because whenthe lambda sensor works well the air-ratio model from [12]which has better prediction capability is utilized resulting in
Mathematical Problems in Engineering 7
Optimizer(Brentrsquos
method)Supplementaryair-ratio model
Air-ratio model from
Real air-ratio
lambda sensor
YesDoes lambda sensor work
FTC work flow
Test car
Sensor signals
Control signal
MoTeC M800 ECU
NI DAQ-9178
LabVIEW interfaceprogram
(ie 04 le yt le 3)
yt measured by
(Wong et al 2014)
Figure 5 Experimental setup and signal flow between test car and FTC
102030405060708090
0 5 10 15 20 25
Thro
ttle p
ositi
on (
)
Time (s)
Figure 6 Test cycle throttle position versus time
better control performance For comparison purpose LMAEis again chosen as the tracking index (TI) to evaluate thetracking ability of the controllers defined by
TI = minus log[ 1119879119904
119879119904
sum
119896=1
1003816100381610038161003816119910119905 minus 119910119903 (119905)1003816100381610038161003816]
(13)
where 119905 is time step 119879119904is the total number of time step in
the test 119910119905is the actual air-ratio at each time step and 119910
119903(119905) is
the corresponding target air-ratio at each time stepThe targetair-ratio varies according to the aforesaid practical operating
Table 2 Performance of different controllers for the pilot test
Controller Lambda sensor TI Maximum overshootFTC Under failure 21022 01188Traditional system Under failure 16244 01235DNMPC Normal 22896 01267FTC Normal 23309 01074
conditionsThe corresponding results under different lambdasensor conditions are shown in Table 2
The results in Table 2 show that even when the lambdasensor is under failure the control performance of the FTCcan still maintain about 90 of that under normal lambdasensor condition Table 2 also shows that the performanceof the proposed FTC under sensor failure is similar to thatof DNMPC The reason may be that the accuracy of theELM supplementary model is similar to that of the time-series diagonal neural-network model in [10] Moreover ascompared to traditional air-ratio control system (ie factorylookup table) the proposed FTC can improve the air-ratiocontrol performance at about 30 when the lambda sensoris under failure indicating that the overall air-ratio controlperformance of the FTC is satisfactory
Air-ratio model prediction accuracy is one of the mostimportant factors affecting the control performance of
8 Mathematical Problems in Engineering
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 7 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under lambda sensor failure
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 8 (a) Air-ratio control results and (b) corresponding fuel injection time of traditional air-ratio control system under lambda sensorfailure (ie using factory lookup table only)
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 9 (a) Air-ratio control results and (b) corresponding fuel injection time of DNMPC under normal lambda sensor condition
the model predictive controllers Therefore as the air-ratiomeasurement cannot be provided for model prediction whenthe lambda sensor is under failure degrading of the air-ratiocontrol performance is unavoidable Thankfully with the
proposed ELM supplementary air-ratio model the controlperformance can still be maintained at an acceptable rangeThis implies that the proposed model and control strategy isfeasible
Mathematical Problems in Engineering 9
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 10 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under normal lambda sensor condition
6 Conclusions
In this study a supplementary air-ratio model was con-structed using kernel-based ELM in which the air-ratio timehistories were not included in the model input The purposeof the model is to predict the future air-ratio dynamics whenthe previous air-ratio measurement is unavailable With thesupplementary air-ratio model a FTC for engine air-ratiocontrol was developed as the first attempt in the literature Intraditional case the lambda sensor is assumed to work prop-erly so traditional air-ratio control system may not performwell when the lambda sensor is malfunctioningThe purposeof the proposed FTC is to maintain the air-ratio controlperformance even when the lambda sensor is under failureor during cold start
To evaluate its performance the proposed FTC was suc-cessfully implemented and tested on a real automotive engineExperimental results show that when the lambda sensor doesnot work well the air-ratio control performance of the FTCcan be effectively maintained over 90 of that under normallambda sensor condition Therefore the FTC is a promisingbackup engine air-ratio control strategy In other words theproposed control scheme in Figure 3 is very suitable toimplement in the automotive ECU to provide both regularand fault tolerance control of engine air-ratio
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is supported by the University of MacauResearch Grant (Grant nos MYRG2014-00178-FST andMYRG075(Y1-L2)-FST13-VCM) The research is also sup-ported by the Science and Technology Development Fund ofMacau (Grant no FDCT0752013A)
References
[1] J Heinrich P E Schwarze N Stilianakis et al Health Effectsof Transport-Related Air Pollution World Health Organization2005
[2] S S Lim T Vos A D Flaxman et al ldquoA comparative riskassessment of burden of disease and injury attributable to 67risk factors and risk factor clusters in 21 regions 1990ndash2010a systematic analysis for the Global Burden of Disease Study2010rdquoThe Lancet vol 380 no 9859 pp 2224ndash2260 2010
[3] S H L Yim and S R H Barrett ldquoPublic health impacts ofcombustion emissions in the United Kingdomrdquo EnvironmentalScience amp Technology vol 46 no 8 pp 4291ndash4296 2012
[4] K Zhang and S Batterman ldquoAir pollution and health risks dueto vehicle trafficrdquo Science of the Total Environment vol 450-451pp 307ndash316 2013
[5] J B Heywood Internal Combustion Engine FundamentalsMcGraw-Hill New York NY USA 1988
[6] T Gilles Automotive Service Inspection Maintenance RepairCengage Learning 2011
[7] S Pace and G G Zhu ldquoSliding mode control of both air-to-fuel and fuel ratios for a dual-fuel internal combustion enginerdquoJournal of Dynamic Systems Measurement and Control vol 134no 3 Article ID 031012 2012
[8] R Tafreshi B Ebrahimi J Mohammadpour M A FranchekK Grigoriadis and H Masudi ldquoLinear dynamic parameter-varying sliding manifold for air-fuel ratio control in lean-burnenginesrdquo IET Control Theory amp Applications vol 7 no 10 pp1319ndash1329 2013
[9] B Ebrahimi R Tafreshi H Masudi M Franchek J Moham-madpour andKGrigoriadis ldquoAparameter-varying filtered PIDstrategy for air-fuel ratio control of spark ignition enginesrdquoControl Engineering Practice vol 20 no 8 pp 805ndash815 2012
[10] Y-J Zhai D-W Yu H-Y Guo and D L Yu ldquoRobust airfuelratio control with adaptive DRNN model and AD tuningrdquoEngineering Applications of Artificial Intelligence vol 23 no 2pp 283ndash289 2010
[11] T Sardarmehni J Keighobadi M B Menhaj and H RahmanildquoRobust predictive control of lambda in internal combustionengines using neural networksrdquo Archives of Civil and Mechani-cal Engineering vol 13 no 4 pp 432ndash443 2013
10 Mathematical Problems in Engineering
[12] P K Wong H C Wong C M Vong Z Xie and SHuang ldquoModel predictive engine air-ratio control using onlinesequential extreme learning machinerdquo Neural Computing andApplications 2014
[13] P K Wong L M Tam K Li and C M Vong ldquoEngine idle-speed system modelling and control optimization using arti-ficial intelligencerdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 224no 1 pp 55ndash72 2010
[14] Y-W Kim G Rizzoni and V I Utkin ldquoDeveloping a faulttolerant power-train control system by integrating design ofcontrol and diagnosticsrdquo International Journal of Robust andNonlinear Control vol 11 no 11 pp 1095ndash1114 2001
[15] E Gassenfeit and J Powell ldquoAlgorithms for air-fuel ratioestimation using internal combustion engine cylinder pressurerdquoSAE Technical Paper 890300 1989
[16] J R Asik G M Meyer and D X Tang ldquoAF ratio estimationand control based on induced engine roughnessrdquo IEEE ControlSystems Magazine vol 16 no 6 pp 35ndash42 1996
[17] G-B Huang ldquoAn insight into extreme learning machinesrandom neurons random features and kernelsrdquo CognitiveComputation vol 6 no 3 pp 376ndash390 2014
[18] K I Wong P K Wong C S Cheung and C M Vong ldquoMod-elling of diesel engine performance using advanced machinelearning methods under scarce and exponential data setrdquoApplied Soft Computing vol 13 no 11 pp 4428ndash4441 2013
[19] J W Cao Z P Lin G-B Huang and N Liu ldquoVoting basedextreme learning machinerdquo Information Sciences vol 185 pp66ndash77 2012
[20] I Lou Z Xie W K Ung and K M Mok ldquoFreshwateralgal bloom prediction by extreme learning machine in MacauStorage Reservoirsrdquo Neural Computing and Applications 2014
[21] J Cao and L Xiong ldquoProtein sequence classification withimproved extreme learning machine algorithmsrdquo BioMedResearch International vol 2014 Article ID 103054 12 pages2014
[22] P K Wong K I Wong C M Vong and C S CheungldquoModeling and optimization of biodiesel engine performanceusing kernel-based extreme learning machine and cuckoosearchrdquo Renewable Energy vol 74 pp 640ndash647 2015
[23] T R Chandrupatla ldquoAn efficient quadratic fitmdashsectioningalgorithm for minimization without derivativesrdquo ComputerMethods in Applied Mechanics and Engineering vol 152 no 1-2 pp 211ndash217 1998
[24] W W Pulkrabek Engineering Fundamentals of the InternalCombustion Engine Pearson Prentice Hall 2nd edition 2004
[25] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[26] G Y Li Application of Intelligent Control and MATLAB to Elec-tronically Controlled Engines Publishing House of ElectronicsIndustry Beijing China 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
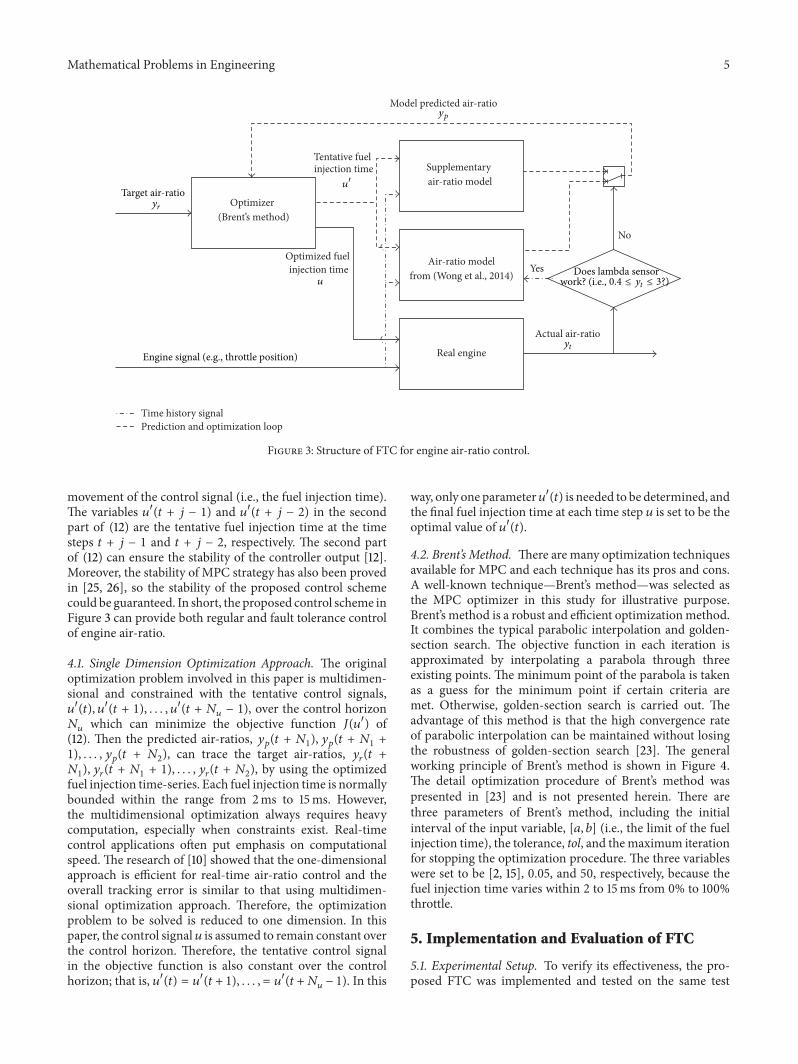
Mathematical Problems in Engineering 5
Optimizer(Brentrsquos method)
Supplementary air-ratio model
from (Wong et al 2014)
Real engine
Tentative fuel injection time
Optimized fuel injection time
Actual air-ratio
Yes
Model predicted air-ratio
No
Prediction and optimization loop Time history signal
Target air-ratioyr
yp
u998400
yt
Air-ratio model
u
Engine signal (eg throttle position)
Does lambda sensorwork (ie 04 le yt le 3)
Figure 3 Structure of FTC for engine air-ratio control
movement of the control signal (ie the fuel injection time)The variables 1199061015840(119905 + 119895 minus 1) and 1199061015840(119905 + 119895 minus 2) in the secondpart of (12) are the tentative fuel injection time at the timesteps 119905 + 119895 minus 1 and 119905 + 119895 minus 2 respectively The second partof (12) can ensure the stability of the controller output [12]Moreover the stability of MPC strategy has also been provedin [25 26] so the stability of the proposed control schemecould be guaranteed In short the proposed control scheme inFigure 3 can provide both regular and fault tolerance controlof engine air-ratio
41 Single Dimension Optimization Approach The originaloptimization problem involved in this paper is multidimen-sional and constrained with the tentative control signals1199061015840(119905) 1199061015840(119905 + 1) 119906
1015840(119905 + 119873
119906minus 1) over the control horizon
119873119906which can minimize the objective function 119869(1199061015840) of
(12) Then the predicted air-ratios 119910119901(119905 + 119873
1) 119910119901(119905 + 119873
1+
1) 119910119901(119905 + 119873
2) can trace the target air-ratios 119910
119903(119905 +
1198731) 119910119903(119905 + 119873
1+ 1) 119910
119903(119905 + 119873
2) by using the optimized
fuel injection time-series Each fuel injection time is normallybounded within the range from 2ms to 15ms Howeverthe multidimensional optimization always requires heavycomputation especially when constraints exist Real-timecontrol applications often put emphasis on computationalspeed The research of [10] showed that the one-dimensionalapproach is efficient for real-time air-ratio control and theoverall tracking error is similar to that using multidimen-sional optimization approach Therefore the optimizationproblem to be solved is reduced to one dimension In thispaper the control signal 119906 is assumed to remain constant overthe control horizon Therefore the tentative control signalin the objective function is also constant over the controlhorizon that is 1199061015840(119905) = 1199061015840(119905 + 1) = 1199061015840(119905 +119873
119906minus 1) In this
way only one parameter1199061015840(119905) is needed to be determined andthe final fuel injection time at each time step 119906 is set to be theoptimal value of 1199061015840(119905)
42 Brentrsquos Method There are many optimization techniquesavailable for MPC and each technique has its pros and consA well-known techniquemdashBrentrsquos methodmdashwas selected asthe MPC optimizer in this study for illustrative purposeBrentrsquos method is a robust and efficient optimizationmethodIt combines the typical parabolic interpolation and golden-section search The objective function in each iteration isapproximated by interpolating a parabola through threeexisting points The minimum point of the parabola is takenas a guess for the minimum point if certain criteria aremet Otherwise golden-section search is carried out Theadvantage of this method is that the high convergence rateof parabolic interpolation can be maintained without losingthe robustness of golden-section search [23] The generalworking principle of Brentrsquos method is shown in Figure 4The detail optimization procedure of Brentrsquos method waspresented in [23] and is not presented herein There arethree parameters of Brentrsquos method including the initialinterval of the input variable [119886 119887] (ie the limit of the fuelinjection time) the tolerance tol and themaximum iterationfor stopping the optimization procedure The three variableswere set to be [2 15] 005 and 50 respectively because thefuel injection time varies within 2 to 15ms from 0 to 100throttle
5 Implementation and Evaluation of FTC
51 Experimental Setup To verify its effectiveness the pro-posed FTC was implemented and tested on the same test
6 Mathematical Problems in Engineering
Parabolic interpolation
Start
Yes No
Golden-section search
Output
Yes
No
|J(u998400k+1) minus J(u
998400k)| lt 05 times min (|u
998400k minus a| |b minus u
998400k|)
|u998400k+1 minus u
998400k| lt tol or over maximum iteration
Figure 4 General working principle of Brentrsquos method
car used for sample data collection in Section 3 (HondaDC5 Type-R with K20A i-VTEC engine and MoTeC M800programmable ECU) The algorithm of FTC was first imple-mented using MATLAB A National Instrument (NI) Com-pactDAQ chassis DAQ-9178 was then employed for signalprocessing between the MATLAB program and the MoTeCECU via NI LabVIEW program In other words NI DAQ-9178 serves as an interface between the MATLAB programand the MoTeC ECU Apart from fuel injector control theMoTeC ECU also contains many basic control maps suchas ignition map and valve timing map to maintain theengine operationThe experimental setup and the signal flowbetween the test car and FTC are shown in Figure 5
52 Pilot Test-Tracking Ability To evaluate the tracking per-formance of the proposed FTC a pilot test was carried outThe test was done under the condition that the lambda sensoris already malfunctioning (ie the supplementary air-ratiomodel in the FTC is used) The test cycle for the pilot testis shown in Figure 6 where the throttle position graduallychanges from 15 to 75 throttle (the throttle positionincreases by 15 every 5 s) Such test cycle is designed byreferring to [10] which almost covers the whole operatingcondition In this test the air-ratio is required to trackthe target air-ratios from the stoichiometric value (100) forminimum emissions to a value for the best brake-specificfuel consumption (105) and then to a value for maximumengine power (095) as the throttle position is graduallychanged from 15 to 75 throttle Such tracking of air-ratiochanges is essential for automobiles to satisfy the emissionfuel consumption and power requirements under differentoperating conditions [6]
After choosing the sampling time to be 001 s the trackingability of the FTC was examined By trial-and-error theparameters of the optimizer were chosen as119873
1= 1119873
2= 8
120588 = 075 and 119873119906= 5 With the test cycle shown in Fig-
ure 6 and the parameters chosen the air-ratio control resultand the corresponding fuel injection time of the FTC areshown in Figure 7 It can be seen from Figure 7 that the FTCcan regulate the air-ratio to follow the target air-ratios withacceptable deviation even when the lambda sensor is underfailure
To further verify the result three tests were done Thefirst one was conducted under the condition that the lambdasensor did not work and traditional air-ratio controller (iefactory lookup table) was employed The other two werecarried out under the condition that the lambda sensor couldwork well and a diagonal recurrent neural-network modelpredictive controller (DNMPC) which is a recent air-ratiocontrol algorithm applicable when the lambda sensor worksnormally [10] was employed along with the proposed FTCfor comparison purpose The air-ratio control results and thecorresponding fuel injection time of the three tests are shownin Figures 8 9 and 10 respectively
When comparing Figure 8 to Figure 7 it is obvious thatthe proposed FTC outperforms traditional air-ratio controlsystemwhen the lambda sensor does not work Furthermoreby comparing Figures 9 and 10 it can be seen that theproposed FTC can perform slightly better than the DNMPCwhen the lambda sensor works properly Finally comparingFigure 10 to Figure 7 it can be learnt that the proposed FTCcan achieve better performance when the lambda sensor isunder normal conditionThis is not surprising because whenthe lambda sensor works well the air-ratio model from [12]which has better prediction capability is utilized resulting in
Mathematical Problems in Engineering 7
Optimizer(Brentrsquos
method)Supplementaryair-ratio model
Air-ratio model from
Real air-ratio
lambda sensor
YesDoes lambda sensor work
FTC work flow
Test car
Sensor signals
Control signal
MoTeC M800 ECU
NI DAQ-9178
LabVIEW interfaceprogram
(ie 04 le yt le 3)
yt measured by
(Wong et al 2014)
Figure 5 Experimental setup and signal flow between test car and FTC
102030405060708090
0 5 10 15 20 25
Thro
ttle p
ositi
on (
)
Time (s)
Figure 6 Test cycle throttle position versus time
better control performance For comparison purpose LMAEis again chosen as the tracking index (TI) to evaluate thetracking ability of the controllers defined by
TI = minus log[ 1119879119904
119879119904
sum
119896=1
1003816100381610038161003816119910119905 minus 119910119903 (119905)1003816100381610038161003816]
(13)
where 119905 is time step 119879119904is the total number of time step in
the test 119910119905is the actual air-ratio at each time step and 119910
119903(119905) is
the corresponding target air-ratio at each time stepThe targetair-ratio varies according to the aforesaid practical operating
Table 2 Performance of different controllers for the pilot test
Controller Lambda sensor TI Maximum overshootFTC Under failure 21022 01188Traditional system Under failure 16244 01235DNMPC Normal 22896 01267FTC Normal 23309 01074
conditionsThe corresponding results under different lambdasensor conditions are shown in Table 2
The results in Table 2 show that even when the lambdasensor is under failure the control performance of the FTCcan still maintain about 90 of that under normal lambdasensor condition Table 2 also shows that the performanceof the proposed FTC under sensor failure is similar to thatof DNMPC The reason may be that the accuracy of theELM supplementary model is similar to that of the time-series diagonal neural-network model in [10] Moreover ascompared to traditional air-ratio control system (ie factorylookup table) the proposed FTC can improve the air-ratiocontrol performance at about 30 when the lambda sensoris under failure indicating that the overall air-ratio controlperformance of the FTC is satisfactory
Air-ratio model prediction accuracy is one of the mostimportant factors affecting the control performance of
8 Mathematical Problems in Engineering
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 7 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under lambda sensor failure
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 8 (a) Air-ratio control results and (b) corresponding fuel injection time of traditional air-ratio control system under lambda sensorfailure (ie using factory lookup table only)
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 9 (a) Air-ratio control results and (b) corresponding fuel injection time of DNMPC under normal lambda sensor condition
the model predictive controllers Therefore as the air-ratiomeasurement cannot be provided for model prediction whenthe lambda sensor is under failure degrading of the air-ratiocontrol performance is unavoidable Thankfully with the
proposed ELM supplementary air-ratio model the controlperformance can still be maintained at an acceptable rangeThis implies that the proposed model and control strategy isfeasible
Mathematical Problems in Engineering 9
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 10 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under normal lambda sensor condition
6 Conclusions
In this study a supplementary air-ratio model was con-structed using kernel-based ELM in which the air-ratio timehistories were not included in the model input The purposeof the model is to predict the future air-ratio dynamics whenthe previous air-ratio measurement is unavailable With thesupplementary air-ratio model a FTC for engine air-ratiocontrol was developed as the first attempt in the literature Intraditional case the lambda sensor is assumed to work prop-erly so traditional air-ratio control system may not performwell when the lambda sensor is malfunctioningThe purposeof the proposed FTC is to maintain the air-ratio controlperformance even when the lambda sensor is under failureor during cold start
To evaluate its performance the proposed FTC was suc-cessfully implemented and tested on a real automotive engineExperimental results show that when the lambda sensor doesnot work well the air-ratio control performance of the FTCcan be effectively maintained over 90 of that under normallambda sensor condition Therefore the FTC is a promisingbackup engine air-ratio control strategy In other words theproposed control scheme in Figure 3 is very suitable toimplement in the automotive ECU to provide both regularand fault tolerance control of engine air-ratio
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is supported by the University of MacauResearch Grant (Grant nos MYRG2014-00178-FST andMYRG075(Y1-L2)-FST13-VCM) The research is also sup-ported by the Science and Technology Development Fund ofMacau (Grant no FDCT0752013A)
References
[1] J Heinrich P E Schwarze N Stilianakis et al Health Effectsof Transport-Related Air Pollution World Health Organization2005
[2] S S Lim T Vos A D Flaxman et al ldquoA comparative riskassessment of burden of disease and injury attributable to 67risk factors and risk factor clusters in 21 regions 1990ndash2010a systematic analysis for the Global Burden of Disease Study2010rdquoThe Lancet vol 380 no 9859 pp 2224ndash2260 2010
[3] S H L Yim and S R H Barrett ldquoPublic health impacts ofcombustion emissions in the United Kingdomrdquo EnvironmentalScience amp Technology vol 46 no 8 pp 4291ndash4296 2012
[4] K Zhang and S Batterman ldquoAir pollution and health risks dueto vehicle trafficrdquo Science of the Total Environment vol 450-451pp 307ndash316 2013
[5] J B Heywood Internal Combustion Engine FundamentalsMcGraw-Hill New York NY USA 1988
[6] T Gilles Automotive Service Inspection Maintenance RepairCengage Learning 2011
[7] S Pace and G G Zhu ldquoSliding mode control of both air-to-fuel and fuel ratios for a dual-fuel internal combustion enginerdquoJournal of Dynamic Systems Measurement and Control vol 134no 3 Article ID 031012 2012
[8] R Tafreshi B Ebrahimi J Mohammadpour M A FranchekK Grigoriadis and H Masudi ldquoLinear dynamic parameter-varying sliding manifold for air-fuel ratio control in lean-burnenginesrdquo IET Control Theory amp Applications vol 7 no 10 pp1319ndash1329 2013
[9] B Ebrahimi R Tafreshi H Masudi M Franchek J Moham-madpour andKGrigoriadis ldquoAparameter-varying filtered PIDstrategy for air-fuel ratio control of spark ignition enginesrdquoControl Engineering Practice vol 20 no 8 pp 805ndash815 2012
[10] Y-J Zhai D-W Yu H-Y Guo and D L Yu ldquoRobust airfuelratio control with adaptive DRNN model and AD tuningrdquoEngineering Applications of Artificial Intelligence vol 23 no 2pp 283ndash289 2010
[11] T Sardarmehni J Keighobadi M B Menhaj and H RahmanildquoRobust predictive control of lambda in internal combustionengines using neural networksrdquo Archives of Civil and Mechani-cal Engineering vol 13 no 4 pp 432ndash443 2013
10 Mathematical Problems in Engineering
[12] P K Wong H C Wong C M Vong Z Xie and SHuang ldquoModel predictive engine air-ratio control using onlinesequential extreme learning machinerdquo Neural Computing andApplications 2014
[13] P K Wong L M Tam K Li and C M Vong ldquoEngine idle-speed system modelling and control optimization using arti-ficial intelligencerdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 224no 1 pp 55ndash72 2010
[14] Y-W Kim G Rizzoni and V I Utkin ldquoDeveloping a faulttolerant power-train control system by integrating design ofcontrol and diagnosticsrdquo International Journal of Robust andNonlinear Control vol 11 no 11 pp 1095ndash1114 2001
[15] E Gassenfeit and J Powell ldquoAlgorithms for air-fuel ratioestimation using internal combustion engine cylinder pressurerdquoSAE Technical Paper 890300 1989
[16] J R Asik G M Meyer and D X Tang ldquoAF ratio estimationand control based on induced engine roughnessrdquo IEEE ControlSystems Magazine vol 16 no 6 pp 35ndash42 1996
[17] G-B Huang ldquoAn insight into extreme learning machinesrandom neurons random features and kernelsrdquo CognitiveComputation vol 6 no 3 pp 376ndash390 2014
[18] K I Wong P K Wong C S Cheung and C M Vong ldquoMod-elling of diesel engine performance using advanced machinelearning methods under scarce and exponential data setrdquoApplied Soft Computing vol 13 no 11 pp 4428ndash4441 2013
[19] J W Cao Z P Lin G-B Huang and N Liu ldquoVoting basedextreme learning machinerdquo Information Sciences vol 185 pp66ndash77 2012
[20] I Lou Z Xie W K Ung and K M Mok ldquoFreshwateralgal bloom prediction by extreme learning machine in MacauStorage Reservoirsrdquo Neural Computing and Applications 2014
[21] J Cao and L Xiong ldquoProtein sequence classification withimproved extreme learning machine algorithmsrdquo BioMedResearch International vol 2014 Article ID 103054 12 pages2014
[22] P K Wong K I Wong C M Vong and C S CheungldquoModeling and optimization of biodiesel engine performanceusing kernel-based extreme learning machine and cuckoosearchrdquo Renewable Energy vol 74 pp 640ndash647 2015
[23] T R Chandrupatla ldquoAn efficient quadratic fitmdashsectioningalgorithm for minimization without derivativesrdquo ComputerMethods in Applied Mechanics and Engineering vol 152 no 1-2 pp 211ndash217 1998
[24] W W Pulkrabek Engineering Fundamentals of the InternalCombustion Engine Pearson Prentice Hall 2nd edition 2004
[25] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[26] G Y Li Application of Intelligent Control and MATLAB to Elec-tronically Controlled Engines Publishing House of ElectronicsIndustry Beijing China 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Parabolic interpolation
Start
Yes No
Golden-section search
Output
Yes
No
|J(u998400k+1) minus J(u
998400k)| lt 05 times min (|u
998400k minus a| |b minus u
998400k|)
|u998400k+1 minus u
998400k| lt tol or over maximum iteration
Figure 4 General working principle of Brentrsquos method
car used for sample data collection in Section 3 (HondaDC5 Type-R with K20A i-VTEC engine and MoTeC M800programmable ECU) The algorithm of FTC was first imple-mented using MATLAB A National Instrument (NI) Com-pactDAQ chassis DAQ-9178 was then employed for signalprocessing between the MATLAB program and the MoTeCECU via NI LabVIEW program In other words NI DAQ-9178 serves as an interface between the MATLAB programand the MoTeC ECU Apart from fuel injector control theMoTeC ECU also contains many basic control maps suchas ignition map and valve timing map to maintain theengine operationThe experimental setup and the signal flowbetween the test car and FTC are shown in Figure 5
52 Pilot Test-Tracking Ability To evaluate the tracking per-formance of the proposed FTC a pilot test was carried outThe test was done under the condition that the lambda sensoris already malfunctioning (ie the supplementary air-ratiomodel in the FTC is used) The test cycle for the pilot testis shown in Figure 6 where the throttle position graduallychanges from 15 to 75 throttle (the throttle positionincreases by 15 every 5 s) Such test cycle is designed byreferring to [10] which almost covers the whole operatingcondition In this test the air-ratio is required to trackthe target air-ratios from the stoichiometric value (100) forminimum emissions to a value for the best brake-specificfuel consumption (105) and then to a value for maximumengine power (095) as the throttle position is graduallychanged from 15 to 75 throttle Such tracking of air-ratiochanges is essential for automobiles to satisfy the emissionfuel consumption and power requirements under differentoperating conditions [6]
After choosing the sampling time to be 001 s the trackingability of the FTC was examined By trial-and-error theparameters of the optimizer were chosen as119873
1= 1119873
2= 8
120588 = 075 and 119873119906= 5 With the test cycle shown in Fig-
ure 6 and the parameters chosen the air-ratio control resultand the corresponding fuel injection time of the FTC areshown in Figure 7 It can be seen from Figure 7 that the FTCcan regulate the air-ratio to follow the target air-ratios withacceptable deviation even when the lambda sensor is underfailure
To further verify the result three tests were done Thefirst one was conducted under the condition that the lambdasensor did not work and traditional air-ratio controller (iefactory lookup table) was employed The other two werecarried out under the condition that the lambda sensor couldwork well and a diagonal recurrent neural-network modelpredictive controller (DNMPC) which is a recent air-ratiocontrol algorithm applicable when the lambda sensor worksnormally [10] was employed along with the proposed FTCfor comparison purpose The air-ratio control results and thecorresponding fuel injection time of the three tests are shownin Figures 8 9 and 10 respectively
When comparing Figure 8 to Figure 7 it is obvious thatthe proposed FTC outperforms traditional air-ratio controlsystemwhen the lambda sensor does not work Furthermoreby comparing Figures 9 and 10 it can be seen that theproposed FTC can perform slightly better than the DNMPCwhen the lambda sensor works properly Finally comparingFigure 10 to Figure 7 it can be learnt that the proposed FTCcan achieve better performance when the lambda sensor isunder normal conditionThis is not surprising because whenthe lambda sensor works well the air-ratio model from [12]which has better prediction capability is utilized resulting in
Mathematical Problems in Engineering 7
Optimizer(Brentrsquos
method)Supplementaryair-ratio model
Air-ratio model from
Real air-ratio
lambda sensor
YesDoes lambda sensor work
FTC work flow
Test car
Sensor signals
Control signal
MoTeC M800 ECU
NI DAQ-9178
LabVIEW interfaceprogram
(ie 04 le yt le 3)
yt measured by
(Wong et al 2014)
Figure 5 Experimental setup and signal flow between test car and FTC
102030405060708090
0 5 10 15 20 25
Thro
ttle p
ositi
on (
)
Time (s)
Figure 6 Test cycle throttle position versus time
better control performance For comparison purpose LMAEis again chosen as the tracking index (TI) to evaluate thetracking ability of the controllers defined by
TI = minus log[ 1119879119904
119879119904
sum
119896=1
1003816100381610038161003816119910119905 minus 119910119903 (119905)1003816100381610038161003816]
(13)
where 119905 is time step 119879119904is the total number of time step in
the test 119910119905is the actual air-ratio at each time step and 119910
119903(119905) is
the corresponding target air-ratio at each time stepThe targetair-ratio varies according to the aforesaid practical operating
Table 2 Performance of different controllers for the pilot test
Controller Lambda sensor TI Maximum overshootFTC Under failure 21022 01188Traditional system Under failure 16244 01235DNMPC Normal 22896 01267FTC Normal 23309 01074
conditionsThe corresponding results under different lambdasensor conditions are shown in Table 2
The results in Table 2 show that even when the lambdasensor is under failure the control performance of the FTCcan still maintain about 90 of that under normal lambdasensor condition Table 2 also shows that the performanceof the proposed FTC under sensor failure is similar to thatof DNMPC The reason may be that the accuracy of theELM supplementary model is similar to that of the time-series diagonal neural-network model in [10] Moreover ascompared to traditional air-ratio control system (ie factorylookup table) the proposed FTC can improve the air-ratiocontrol performance at about 30 when the lambda sensoris under failure indicating that the overall air-ratio controlperformance of the FTC is satisfactory
Air-ratio model prediction accuracy is one of the mostimportant factors affecting the control performance of
8 Mathematical Problems in Engineering
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 7 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under lambda sensor failure
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 8 (a) Air-ratio control results and (b) corresponding fuel injection time of traditional air-ratio control system under lambda sensorfailure (ie using factory lookup table only)
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 9 (a) Air-ratio control results and (b) corresponding fuel injection time of DNMPC under normal lambda sensor condition
the model predictive controllers Therefore as the air-ratiomeasurement cannot be provided for model prediction whenthe lambda sensor is under failure degrading of the air-ratiocontrol performance is unavoidable Thankfully with the
proposed ELM supplementary air-ratio model the controlperformance can still be maintained at an acceptable rangeThis implies that the proposed model and control strategy isfeasible
Mathematical Problems in Engineering 9
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 10 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under normal lambda sensor condition
6 Conclusions
In this study a supplementary air-ratio model was con-structed using kernel-based ELM in which the air-ratio timehistories were not included in the model input The purposeof the model is to predict the future air-ratio dynamics whenthe previous air-ratio measurement is unavailable With thesupplementary air-ratio model a FTC for engine air-ratiocontrol was developed as the first attempt in the literature Intraditional case the lambda sensor is assumed to work prop-erly so traditional air-ratio control system may not performwell when the lambda sensor is malfunctioningThe purposeof the proposed FTC is to maintain the air-ratio controlperformance even when the lambda sensor is under failureor during cold start
To evaluate its performance the proposed FTC was suc-cessfully implemented and tested on a real automotive engineExperimental results show that when the lambda sensor doesnot work well the air-ratio control performance of the FTCcan be effectively maintained over 90 of that under normallambda sensor condition Therefore the FTC is a promisingbackup engine air-ratio control strategy In other words theproposed control scheme in Figure 3 is very suitable toimplement in the automotive ECU to provide both regularand fault tolerance control of engine air-ratio
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is supported by the University of MacauResearch Grant (Grant nos MYRG2014-00178-FST andMYRG075(Y1-L2)-FST13-VCM) The research is also sup-ported by the Science and Technology Development Fund ofMacau (Grant no FDCT0752013A)
References
[1] J Heinrich P E Schwarze N Stilianakis et al Health Effectsof Transport-Related Air Pollution World Health Organization2005
[2] S S Lim T Vos A D Flaxman et al ldquoA comparative riskassessment of burden of disease and injury attributable to 67risk factors and risk factor clusters in 21 regions 1990ndash2010a systematic analysis for the Global Burden of Disease Study2010rdquoThe Lancet vol 380 no 9859 pp 2224ndash2260 2010
[3] S H L Yim and S R H Barrett ldquoPublic health impacts ofcombustion emissions in the United Kingdomrdquo EnvironmentalScience amp Technology vol 46 no 8 pp 4291ndash4296 2012
[4] K Zhang and S Batterman ldquoAir pollution and health risks dueto vehicle trafficrdquo Science of the Total Environment vol 450-451pp 307ndash316 2013
[5] J B Heywood Internal Combustion Engine FundamentalsMcGraw-Hill New York NY USA 1988
[6] T Gilles Automotive Service Inspection Maintenance RepairCengage Learning 2011
[7] S Pace and G G Zhu ldquoSliding mode control of both air-to-fuel and fuel ratios for a dual-fuel internal combustion enginerdquoJournal of Dynamic Systems Measurement and Control vol 134no 3 Article ID 031012 2012
[8] R Tafreshi B Ebrahimi J Mohammadpour M A FranchekK Grigoriadis and H Masudi ldquoLinear dynamic parameter-varying sliding manifold for air-fuel ratio control in lean-burnenginesrdquo IET Control Theory amp Applications vol 7 no 10 pp1319ndash1329 2013
[9] B Ebrahimi R Tafreshi H Masudi M Franchek J Moham-madpour andKGrigoriadis ldquoAparameter-varying filtered PIDstrategy for air-fuel ratio control of spark ignition enginesrdquoControl Engineering Practice vol 20 no 8 pp 805ndash815 2012
[10] Y-J Zhai D-W Yu H-Y Guo and D L Yu ldquoRobust airfuelratio control with adaptive DRNN model and AD tuningrdquoEngineering Applications of Artificial Intelligence vol 23 no 2pp 283ndash289 2010
[11] T Sardarmehni J Keighobadi M B Menhaj and H RahmanildquoRobust predictive control of lambda in internal combustionengines using neural networksrdquo Archives of Civil and Mechani-cal Engineering vol 13 no 4 pp 432ndash443 2013
10 Mathematical Problems in Engineering
[12] P K Wong H C Wong C M Vong Z Xie and SHuang ldquoModel predictive engine air-ratio control using onlinesequential extreme learning machinerdquo Neural Computing andApplications 2014
[13] P K Wong L M Tam K Li and C M Vong ldquoEngine idle-speed system modelling and control optimization using arti-ficial intelligencerdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 224no 1 pp 55ndash72 2010
[14] Y-W Kim G Rizzoni and V I Utkin ldquoDeveloping a faulttolerant power-train control system by integrating design ofcontrol and diagnosticsrdquo International Journal of Robust andNonlinear Control vol 11 no 11 pp 1095ndash1114 2001
[15] E Gassenfeit and J Powell ldquoAlgorithms for air-fuel ratioestimation using internal combustion engine cylinder pressurerdquoSAE Technical Paper 890300 1989
[16] J R Asik G M Meyer and D X Tang ldquoAF ratio estimationand control based on induced engine roughnessrdquo IEEE ControlSystems Magazine vol 16 no 6 pp 35ndash42 1996
[17] G-B Huang ldquoAn insight into extreme learning machinesrandom neurons random features and kernelsrdquo CognitiveComputation vol 6 no 3 pp 376ndash390 2014
[18] K I Wong P K Wong C S Cheung and C M Vong ldquoMod-elling of diesel engine performance using advanced machinelearning methods under scarce and exponential data setrdquoApplied Soft Computing vol 13 no 11 pp 4428ndash4441 2013
[19] J W Cao Z P Lin G-B Huang and N Liu ldquoVoting basedextreme learning machinerdquo Information Sciences vol 185 pp66ndash77 2012
[20] I Lou Z Xie W K Ung and K M Mok ldquoFreshwateralgal bloom prediction by extreme learning machine in MacauStorage Reservoirsrdquo Neural Computing and Applications 2014
[21] J Cao and L Xiong ldquoProtein sequence classification withimproved extreme learning machine algorithmsrdquo BioMedResearch International vol 2014 Article ID 103054 12 pages2014
[22] P K Wong K I Wong C M Vong and C S CheungldquoModeling and optimization of biodiesel engine performanceusing kernel-based extreme learning machine and cuckoosearchrdquo Renewable Energy vol 74 pp 640ndash647 2015
[23] T R Chandrupatla ldquoAn efficient quadratic fitmdashsectioningalgorithm for minimization without derivativesrdquo ComputerMethods in Applied Mechanics and Engineering vol 152 no 1-2 pp 211ndash217 1998
[24] W W Pulkrabek Engineering Fundamentals of the InternalCombustion Engine Pearson Prentice Hall 2nd edition 2004
[25] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[26] G Y Li Application of Intelligent Control and MATLAB to Elec-tronically Controlled Engines Publishing House of ElectronicsIndustry Beijing China 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Optimizer(Brentrsquos
method)Supplementaryair-ratio model
Air-ratio model from
Real air-ratio
lambda sensor
YesDoes lambda sensor work
FTC work flow
Test car
Sensor signals
Control signal
MoTeC M800 ECU
NI DAQ-9178
LabVIEW interfaceprogram
(ie 04 le yt le 3)
yt measured by
(Wong et al 2014)
Figure 5 Experimental setup and signal flow between test car and FTC
102030405060708090
0 5 10 15 20 25
Thro
ttle p
ositi
on (
)
Time (s)
Figure 6 Test cycle throttle position versus time
better control performance For comparison purpose LMAEis again chosen as the tracking index (TI) to evaluate thetracking ability of the controllers defined by
TI = minus log[ 1119879119904
119879119904
sum
119896=1
1003816100381610038161003816119910119905 minus 119910119903 (119905)1003816100381610038161003816]
(13)
where 119905 is time step 119879119904is the total number of time step in
the test 119910119905is the actual air-ratio at each time step and 119910
119903(119905) is
the corresponding target air-ratio at each time stepThe targetair-ratio varies according to the aforesaid practical operating
Table 2 Performance of different controllers for the pilot test
Controller Lambda sensor TI Maximum overshootFTC Under failure 21022 01188Traditional system Under failure 16244 01235DNMPC Normal 22896 01267FTC Normal 23309 01074
conditionsThe corresponding results under different lambdasensor conditions are shown in Table 2
The results in Table 2 show that even when the lambdasensor is under failure the control performance of the FTCcan still maintain about 90 of that under normal lambdasensor condition Table 2 also shows that the performanceof the proposed FTC under sensor failure is similar to thatof DNMPC The reason may be that the accuracy of theELM supplementary model is similar to that of the time-series diagonal neural-network model in [10] Moreover ascompared to traditional air-ratio control system (ie factorylookup table) the proposed FTC can improve the air-ratiocontrol performance at about 30 when the lambda sensoris under failure indicating that the overall air-ratio controlperformance of the FTC is satisfactory
Air-ratio model prediction accuracy is one of the mostimportant factors affecting the control performance of
8 Mathematical Problems in Engineering
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 7 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under lambda sensor failure
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 8 (a) Air-ratio control results and (b) corresponding fuel injection time of traditional air-ratio control system under lambda sensorfailure (ie using factory lookup table only)
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 9 (a) Air-ratio control results and (b) corresponding fuel injection time of DNMPC under normal lambda sensor condition
the model predictive controllers Therefore as the air-ratiomeasurement cannot be provided for model prediction whenthe lambda sensor is under failure degrading of the air-ratiocontrol performance is unavoidable Thankfully with the
proposed ELM supplementary air-ratio model the controlperformance can still be maintained at an acceptable rangeThis implies that the proposed model and control strategy isfeasible
Mathematical Problems in Engineering 9
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 10 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under normal lambda sensor condition
6 Conclusions
In this study a supplementary air-ratio model was con-structed using kernel-based ELM in which the air-ratio timehistories were not included in the model input The purposeof the model is to predict the future air-ratio dynamics whenthe previous air-ratio measurement is unavailable With thesupplementary air-ratio model a FTC for engine air-ratiocontrol was developed as the first attempt in the literature Intraditional case the lambda sensor is assumed to work prop-erly so traditional air-ratio control system may not performwell when the lambda sensor is malfunctioningThe purposeof the proposed FTC is to maintain the air-ratio controlperformance even when the lambda sensor is under failureor during cold start
To evaluate its performance the proposed FTC was suc-cessfully implemented and tested on a real automotive engineExperimental results show that when the lambda sensor doesnot work well the air-ratio control performance of the FTCcan be effectively maintained over 90 of that under normallambda sensor condition Therefore the FTC is a promisingbackup engine air-ratio control strategy In other words theproposed control scheme in Figure 3 is very suitable toimplement in the automotive ECU to provide both regularand fault tolerance control of engine air-ratio
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is supported by the University of MacauResearch Grant (Grant nos MYRG2014-00178-FST andMYRG075(Y1-L2)-FST13-VCM) The research is also sup-ported by the Science and Technology Development Fund ofMacau (Grant no FDCT0752013A)
References
[1] J Heinrich P E Schwarze N Stilianakis et al Health Effectsof Transport-Related Air Pollution World Health Organization2005
[2] S S Lim T Vos A D Flaxman et al ldquoA comparative riskassessment of burden of disease and injury attributable to 67risk factors and risk factor clusters in 21 regions 1990ndash2010a systematic analysis for the Global Burden of Disease Study2010rdquoThe Lancet vol 380 no 9859 pp 2224ndash2260 2010
[3] S H L Yim and S R H Barrett ldquoPublic health impacts ofcombustion emissions in the United Kingdomrdquo EnvironmentalScience amp Technology vol 46 no 8 pp 4291ndash4296 2012
[4] K Zhang and S Batterman ldquoAir pollution and health risks dueto vehicle trafficrdquo Science of the Total Environment vol 450-451pp 307ndash316 2013
[5] J B Heywood Internal Combustion Engine FundamentalsMcGraw-Hill New York NY USA 1988
[6] T Gilles Automotive Service Inspection Maintenance RepairCengage Learning 2011
[7] S Pace and G G Zhu ldquoSliding mode control of both air-to-fuel and fuel ratios for a dual-fuel internal combustion enginerdquoJournal of Dynamic Systems Measurement and Control vol 134no 3 Article ID 031012 2012
[8] R Tafreshi B Ebrahimi J Mohammadpour M A FranchekK Grigoriadis and H Masudi ldquoLinear dynamic parameter-varying sliding manifold for air-fuel ratio control in lean-burnenginesrdquo IET Control Theory amp Applications vol 7 no 10 pp1319ndash1329 2013
[9] B Ebrahimi R Tafreshi H Masudi M Franchek J Moham-madpour andKGrigoriadis ldquoAparameter-varying filtered PIDstrategy for air-fuel ratio control of spark ignition enginesrdquoControl Engineering Practice vol 20 no 8 pp 805ndash815 2012
[10] Y-J Zhai D-W Yu H-Y Guo and D L Yu ldquoRobust airfuelratio control with adaptive DRNN model and AD tuningrdquoEngineering Applications of Artificial Intelligence vol 23 no 2pp 283ndash289 2010
[11] T Sardarmehni J Keighobadi M B Menhaj and H RahmanildquoRobust predictive control of lambda in internal combustionengines using neural networksrdquo Archives of Civil and Mechani-cal Engineering vol 13 no 4 pp 432ndash443 2013
10 Mathematical Problems in Engineering
[12] P K Wong H C Wong C M Vong Z Xie and SHuang ldquoModel predictive engine air-ratio control using onlinesequential extreme learning machinerdquo Neural Computing andApplications 2014
[13] P K Wong L M Tam K Li and C M Vong ldquoEngine idle-speed system modelling and control optimization using arti-ficial intelligencerdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 224no 1 pp 55ndash72 2010
[14] Y-W Kim G Rizzoni and V I Utkin ldquoDeveloping a faulttolerant power-train control system by integrating design ofcontrol and diagnosticsrdquo International Journal of Robust andNonlinear Control vol 11 no 11 pp 1095ndash1114 2001
[15] E Gassenfeit and J Powell ldquoAlgorithms for air-fuel ratioestimation using internal combustion engine cylinder pressurerdquoSAE Technical Paper 890300 1989
[16] J R Asik G M Meyer and D X Tang ldquoAF ratio estimationand control based on induced engine roughnessrdquo IEEE ControlSystems Magazine vol 16 no 6 pp 35ndash42 1996
[17] G-B Huang ldquoAn insight into extreme learning machinesrandom neurons random features and kernelsrdquo CognitiveComputation vol 6 no 3 pp 376ndash390 2014
[18] K I Wong P K Wong C S Cheung and C M Vong ldquoMod-elling of diesel engine performance using advanced machinelearning methods under scarce and exponential data setrdquoApplied Soft Computing vol 13 no 11 pp 4428ndash4441 2013
[19] J W Cao Z P Lin G-B Huang and N Liu ldquoVoting basedextreme learning machinerdquo Information Sciences vol 185 pp66ndash77 2012
[20] I Lou Z Xie W K Ung and K M Mok ldquoFreshwateralgal bloom prediction by extreme learning machine in MacauStorage Reservoirsrdquo Neural Computing and Applications 2014
[21] J Cao and L Xiong ldquoProtein sequence classification withimproved extreme learning machine algorithmsrdquo BioMedResearch International vol 2014 Article ID 103054 12 pages2014
[22] P K Wong K I Wong C M Vong and C S CheungldquoModeling and optimization of biodiesel engine performanceusing kernel-based extreme learning machine and cuckoosearchrdquo Renewable Energy vol 74 pp 640ndash647 2015
[23] T R Chandrupatla ldquoAn efficient quadratic fitmdashsectioningalgorithm for minimization without derivativesrdquo ComputerMethods in Applied Mechanics and Engineering vol 152 no 1-2 pp 211ndash217 1998
[24] W W Pulkrabek Engineering Fundamentals of the InternalCombustion Engine Pearson Prentice Hall 2nd edition 2004
[25] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[26] G Y Li Application of Intelligent Control and MATLAB to Elec-tronically Controlled Engines Publishing House of ElectronicsIndustry Beijing China 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
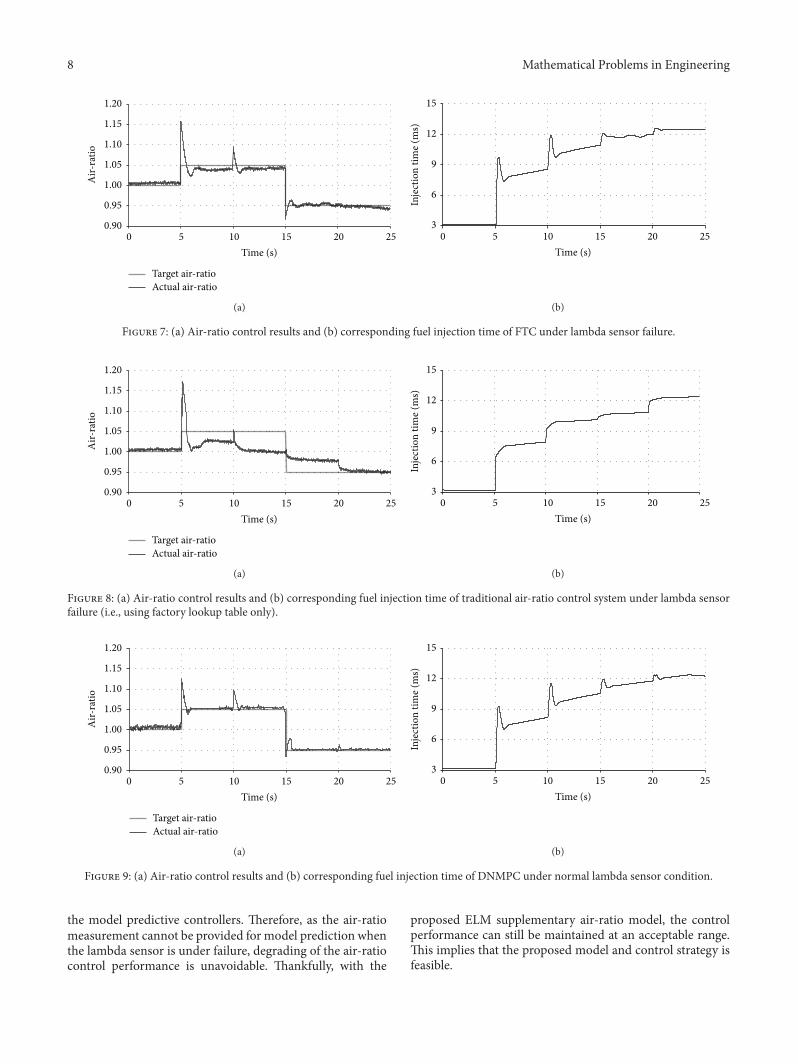
8 Mathematical Problems in Engineering
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 7 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under lambda sensor failure
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 8 (a) Air-ratio control results and (b) corresponding fuel injection time of traditional air-ratio control system under lambda sensorfailure (ie using factory lookup table only)
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 9 (a) Air-ratio control results and (b) corresponding fuel injection time of DNMPC under normal lambda sensor condition
the model predictive controllers Therefore as the air-ratiomeasurement cannot be provided for model prediction whenthe lambda sensor is under failure degrading of the air-ratiocontrol performance is unavoidable Thankfully with the
proposed ELM supplementary air-ratio model the controlperformance can still be maintained at an acceptable rangeThis implies that the proposed model and control strategy isfeasible
Mathematical Problems in Engineering 9
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 10 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under normal lambda sensor condition
6 Conclusions
In this study a supplementary air-ratio model was con-structed using kernel-based ELM in which the air-ratio timehistories were not included in the model input The purposeof the model is to predict the future air-ratio dynamics whenthe previous air-ratio measurement is unavailable With thesupplementary air-ratio model a FTC for engine air-ratiocontrol was developed as the first attempt in the literature Intraditional case the lambda sensor is assumed to work prop-erly so traditional air-ratio control system may not performwell when the lambda sensor is malfunctioningThe purposeof the proposed FTC is to maintain the air-ratio controlperformance even when the lambda sensor is under failureor during cold start
To evaluate its performance the proposed FTC was suc-cessfully implemented and tested on a real automotive engineExperimental results show that when the lambda sensor doesnot work well the air-ratio control performance of the FTCcan be effectively maintained over 90 of that under normallambda sensor condition Therefore the FTC is a promisingbackup engine air-ratio control strategy In other words theproposed control scheme in Figure 3 is very suitable toimplement in the automotive ECU to provide both regularand fault tolerance control of engine air-ratio
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is supported by the University of MacauResearch Grant (Grant nos MYRG2014-00178-FST andMYRG075(Y1-L2)-FST13-VCM) The research is also sup-ported by the Science and Technology Development Fund ofMacau (Grant no FDCT0752013A)
References
[1] J Heinrich P E Schwarze N Stilianakis et al Health Effectsof Transport-Related Air Pollution World Health Organization2005
[2] S S Lim T Vos A D Flaxman et al ldquoA comparative riskassessment of burden of disease and injury attributable to 67risk factors and risk factor clusters in 21 regions 1990ndash2010a systematic analysis for the Global Burden of Disease Study2010rdquoThe Lancet vol 380 no 9859 pp 2224ndash2260 2010
[3] S H L Yim and S R H Barrett ldquoPublic health impacts ofcombustion emissions in the United Kingdomrdquo EnvironmentalScience amp Technology vol 46 no 8 pp 4291ndash4296 2012
[4] K Zhang and S Batterman ldquoAir pollution and health risks dueto vehicle trafficrdquo Science of the Total Environment vol 450-451pp 307ndash316 2013
[5] J B Heywood Internal Combustion Engine FundamentalsMcGraw-Hill New York NY USA 1988
[6] T Gilles Automotive Service Inspection Maintenance RepairCengage Learning 2011
[7] S Pace and G G Zhu ldquoSliding mode control of both air-to-fuel and fuel ratios for a dual-fuel internal combustion enginerdquoJournal of Dynamic Systems Measurement and Control vol 134no 3 Article ID 031012 2012
[8] R Tafreshi B Ebrahimi J Mohammadpour M A FranchekK Grigoriadis and H Masudi ldquoLinear dynamic parameter-varying sliding manifold for air-fuel ratio control in lean-burnenginesrdquo IET Control Theory amp Applications vol 7 no 10 pp1319ndash1329 2013
[9] B Ebrahimi R Tafreshi H Masudi M Franchek J Moham-madpour andKGrigoriadis ldquoAparameter-varying filtered PIDstrategy for air-fuel ratio control of spark ignition enginesrdquoControl Engineering Practice vol 20 no 8 pp 805ndash815 2012
[10] Y-J Zhai D-W Yu H-Y Guo and D L Yu ldquoRobust airfuelratio control with adaptive DRNN model and AD tuningrdquoEngineering Applications of Artificial Intelligence vol 23 no 2pp 283ndash289 2010
[11] T Sardarmehni J Keighobadi M B Menhaj and H RahmanildquoRobust predictive control of lambda in internal combustionengines using neural networksrdquo Archives of Civil and Mechani-cal Engineering vol 13 no 4 pp 432ndash443 2013
10 Mathematical Problems in Engineering
[12] P K Wong H C Wong C M Vong Z Xie and SHuang ldquoModel predictive engine air-ratio control using onlinesequential extreme learning machinerdquo Neural Computing andApplications 2014
[13] P K Wong L M Tam K Li and C M Vong ldquoEngine idle-speed system modelling and control optimization using arti-ficial intelligencerdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 224no 1 pp 55ndash72 2010
[14] Y-W Kim G Rizzoni and V I Utkin ldquoDeveloping a faulttolerant power-train control system by integrating design ofcontrol and diagnosticsrdquo International Journal of Robust andNonlinear Control vol 11 no 11 pp 1095ndash1114 2001
[15] E Gassenfeit and J Powell ldquoAlgorithms for air-fuel ratioestimation using internal combustion engine cylinder pressurerdquoSAE Technical Paper 890300 1989
[16] J R Asik G M Meyer and D X Tang ldquoAF ratio estimationand control based on induced engine roughnessrdquo IEEE ControlSystems Magazine vol 16 no 6 pp 35ndash42 1996
[17] G-B Huang ldquoAn insight into extreme learning machinesrandom neurons random features and kernelsrdquo CognitiveComputation vol 6 no 3 pp 376ndash390 2014
[18] K I Wong P K Wong C S Cheung and C M Vong ldquoMod-elling of diesel engine performance using advanced machinelearning methods under scarce and exponential data setrdquoApplied Soft Computing vol 13 no 11 pp 4428ndash4441 2013
[19] J W Cao Z P Lin G-B Huang and N Liu ldquoVoting basedextreme learning machinerdquo Information Sciences vol 185 pp66ndash77 2012
[20] I Lou Z Xie W K Ung and K M Mok ldquoFreshwateralgal bloom prediction by extreme learning machine in MacauStorage Reservoirsrdquo Neural Computing and Applications 2014
[21] J Cao and L Xiong ldquoProtein sequence classification withimproved extreme learning machine algorithmsrdquo BioMedResearch International vol 2014 Article ID 103054 12 pages2014
[22] P K Wong K I Wong C M Vong and C S CheungldquoModeling and optimization of biodiesel engine performanceusing kernel-based extreme learning machine and cuckoosearchrdquo Renewable Energy vol 74 pp 640ndash647 2015
[23] T R Chandrupatla ldquoAn efficient quadratic fitmdashsectioningalgorithm for minimization without derivativesrdquo ComputerMethods in Applied Mechanics and Engineering vol 152 no 1-2 pp 211ndash217 1998
[24] W W Pulkrabek Engineering Fundamentals of the InternalCombustion Engine Pearson Prentice Hall 2nd edition 2004
[25] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[26] G Y Li Application of Intelligent Control and MATLAB to Elec-tronically Controlled Engines Publishing House of ElectronicsIndustry Beijing China 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
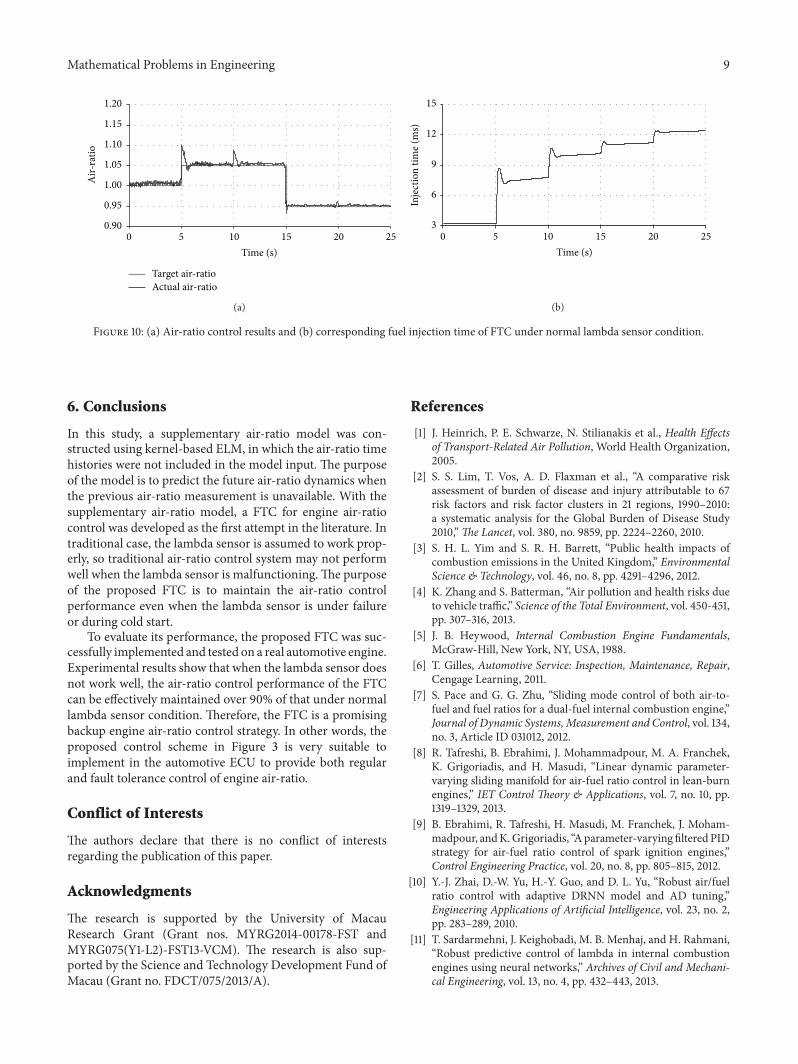
Mathematical Problems in Engineering 9
090
095
100
105
110
115
120
0 5 10 15 20 25
Air-
ratio
Time (s)
Target air-ratioActual air-ratio
(a)
3
6
9
12
15
Inje
ctio
n tim
e (m
s)
0 5 10 15 20 25Time (s)
(b)
Figure 10 (a) Air-ratio control results and (b) corresponding fuel injection time of FTC under normal lambda sensor condition
6 Conclusions
In this study a supplementary air-ratio model was con-structed using kernel-based ELM in which the air-ratio timehistories were not included in the model input The purposeof the model is to predict the future air-ratio dynamics whenthe previous air-ratio measurement is unavailable With thesupplementary air-ratio model a FTC for engine air-ratiocontrol was developed as the first attempt in the literature Intraditional case the lambda sensor is assumed to work prop-erly so traditional air-ratio control system may not performwell when the lambda sensor is malfunctioningThe purposeof the proposed FTC is to maintain the air-ratio controlperformance even when the lambda sensor is under failureor during cold start
To evaluate its performance the proposed FTC was suc-cessfully implemented and tested on a real automotive engineExperimental results show that when the lambda sensor doesnot work well the air-ratio control performance of the FTCcan be effectively maintained over 90 of that under normallambda sensor condition Therefore the FTC is a promisingbackup engine air-ratio control strategy In other words theproposed control scheme in Figure 3 is very suitable toimplement in the automotive ECU to provide both regularand fault tolerance control of engine air-ratio
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is supported by the University of MacauResearch Grant (Grant nos MYRG2014-00178-FST andMYRG075(Y1-L2)-FST13-VCM) The research is also sup-ported by the Science and Technology Development Fund ofMacau (Grant no FDCT0752013A)
References
[1] J Heinrich P E Schwarze N Stilianakis et al Health Effectsof Transport-Related Air Pollution World Health Organization2005
[2] S S Lim T Vos A D Flaxman et al ldquoA comparative riskassessment of burden of disease and injury attributable to 67risk factors and risk factor clusters in 21 regions 1990ndash2010a systematic analysis for the Global Burden of Disease Study2010rdquoThe Lancet vol 380 no 9859 pp 2224ndash2260 2010
[3] S H L Yim and S R H Barrett ldquoPublic health impacts ofcombustion emissions in the United Kingdomrdquo EnvironmentalScience amp Technology vol 46 no 8 pp 4291ndash4296 2012
[4] K Zhang and S Batterman ldquoAir pollution and health risks dueto vehicle trafficrdquo Science of the Total Environment vol 450-451pp 307ndash316 2013
[5] J B Heywood Internal Combustion Engine FundamentalsMcGraw-Hill New York NY USA 1988
[6] T Gilles Automotive Service Inspection Maintenance RepairCengage Learning 2011
[7] S Pace and G G Zhu ldquoSliding mode control of both air-to-fuel and fuel ratios for a dual-fuel internal combustion enginerdquoJournal of Dynamic Systems Measurement and Control vol 134no 3 Article ID 031012 2012
[8] R Tafreshi B Ebrahimi J Mohammadpour M A FranchekK Grigoriadis and H Masudi ldquoLinear dynamic parameter-varying sliding manifold for air-fuel ratio control in lean-burnenginesrdquo IET Control Theory amp Applications vol 7 no 10 pp1319ndash1329 2013
[9] B Ebrahimi R Tafreshi H Masudi M Franchek J Moham-madpour andKGrigoriadis ldquoAparameter-varying filtered PIDstrategy for air-fuel ratio control of spark ignition enginesrdquoControl Engineering Practice vol 20 no 8 pp 805ndash815 2012
[10] Y-J Zhai D-W Yu H-Y Guo and D L Yu ldquoRobust airfuelratio control with adaptive DRNN model and AD tuningrdquoEngineering Applications of Artificial Intelligence vol 23 no 2pp 283ndash289 2010
[11] T Sardarmehni J Keighobadi M B Menhaj and H RahmanildquoRobust predictive control of lambda in internal combustionengines using neural networksrdquo Archives of Civil and Mechani-cal Engineering vol 13 no 4 pp 432ndash443 2013
10 Mathematical Problems in Engineering
[12] P K Wong H C Wong C M Vong Z Xie and SHuang ldquoModel predictive engine air-ratio control using onlinesequential extreme learning machinerdquo Neural Computing andApplications 2014
[13] P K Wong L M Tam K Li and C M Vong ldquoEngine idle-speed system modelling and control optimization using arti-ficial intelligencerdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 224no 1 pp 55ndash72 2010
[14] Y-W Kim G Rizzoni and V I Utkin ldquoDeveloping a faulttolerant power-train control system by integrating design ofcontrol and diagnosticsrdquo International Journal of Robust andNonlinear Control vol 11 no 11 pp 1095ndash1114 2001
[15] E Gassenfeit and J Powell ldquoAlgorithms for air-fuel ratioestimation using internal combustion engine cylinder pressurerdquoSAE Technical Paper 890300 1989
[16] J R Asik G M Meyer and D X Tang ldquoAF ratio estimationand control based on induced engine roughnessrdquo IEEE ControlSystems Magazine vol 16 no 6 pp 35ndash42 1996
[17] G-B Huang ldquoAn insight into extreme learning machinesrandom neurons random features and kernelsrdquo CognitiveComputation vol 6 no 3 pp 376ndash390 2014
[18] K I Wong P K Wong C S Cheung and C M Vong ldquoMod-elling of diesel engine performance using advanced machinelearning methods under scarce and exponential data setrdquoApplied Soft Computing vol 13 no 11 pp 4428ndash4441 2013
[19] J W Cao Z P Lin G-B Huang and N Liu ldquoVoting basedextreme learning machinerdquo Information Sciences vol 185 pp66ndash77 2012
[20] I Lou Z Xie W K Ung and K M Mok ldquoFreshwateralgal bloom prediction by extreme learning machine in MacauStorage Reservoirsrdquo Neural Computing and Applications 2014
[21] J Cao and L Xiong ldquoProtein sequence classification withimproved extreme learning machine algorithmsrdquo BioMedResearch International vol 2014 Article ID 103054 12 pages2014
[22] P K Wong K I Wong C M Vong and C S CheungldquoModeling and optimization of biodiesel engine performanceusing kernel-based extreme learning machine and cuckoosearchrdquo Renewable Energy vol 74 pp 640ndash647 2015
[23] T R Chandrupatla ldquoAn efficient quadratic fitmdashsectioningalgorithm for minimization without derivativesrdquo ComputerMethods in Applied Mechanics and Engineering vol 152 no 1-2 pp 211ndash217 1998
[24] W W Pulkrabek Engineering Fundamentals of the InternalCombustion Engine Pearson Prentice Hall 2nd edition 2004
[25] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[26] G Y Li Application of Intelligent Control and MATLAB to Elec-tronically Controlled Engines Publishing House of ElectronicsIndustry Beijing China 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
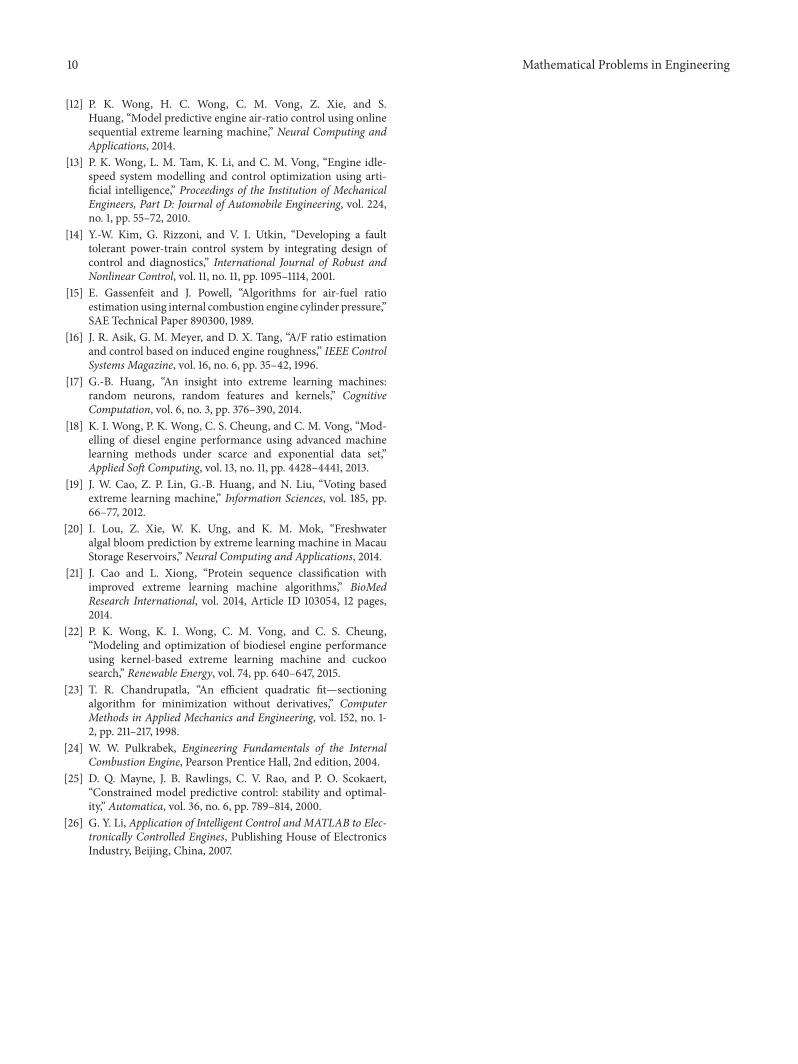
10 Mathematical Problems in Engineering
[12] P K Wong H C Wong C M Vong Z Xie and SHuang ldquoModel predictive engine air-ratio control using onlinesequential extreme learning machinerdquo Neural Computing andApplications 2014
[13] P K Wong L M Tam K Li and C M Vong ldquoEngine idle-speed system modelling and control optimization using arti-ficial intelligencerdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 224no 1 pp 55ndash72 2010
[14] Y-W Kim G Rizzoni and V I Utkin ldquoDeveloping a faulttolerant power-train control system by integrating design ofcontrol and diagnosticsrdquo International Journal of Robust andNonlinear Control vol 11 no 11 pp 1095ndash1114 2001
[15] E Gassenfeit and J Powell ldquoAlgorithms for air-fuel ratioestimation using internal combustion engine cylinder pressurerdquoSAE Technical Paper 890300 1989
[16] J R Asik G M Meyer and D X Tang ldquoAF ratio estimationand control based on induced engine roughnessrdquo IEEE ControlSystems Magazine vol 16 no 6 pp 35ndash42 1996
[17] G-B Huang ldquoAn insight into extreme learning machinesrandom neurons random features and kernelsrdquo CognitiveComputation vol 6 no 3 pp 376ndash390 2014
[18] K I Wong P K Wong C S Cheung and C M Vong ldquoMod-elling of diesel engine performance using advanced machinelearning methods under scarce and exponential data setrdquoApplied Soft Computing vol 13 no 11 pp 4428ndash4441 2013
[19] J W Cao Z P Lin G-B Huang and N Liu ldquoVoting basedextreme learning machinerdquo Information Sciences vol 185 pp66ndash77 2012
[20] I Lou Z Xie W K Ung and K M Mok ldquoFreshwateralgal bloom prediction by extreme learning machine in MacauStorage Reservoirsrdquo Neural Computing and Applications 2014
[21] J Cao and L Xiong ldquoProtein sequence classification withimproved extreme learning machine algorithmsrdquo BioMedResearch International vol 2014 Article ID 103054 12 pages2014
[22] P K Wong K I Wong C M Vong and C S CheungldquoModeling and optimization of biodiesel engine performanceusing kernel-based extreme learning machine and cuckoosearchrdquo Renewable Energy vol 74 pp 640ndash647 2015
[23] T R Chandrupatla ldquoAn efficient quadratic fitmdashsectioningalgorithm for minimization without derivativesrdquo ComputerMethods in Applied Mechanics and Engineering vol 152 no 1-2 pp 211ndash217 1998
[24] W W Pulkrabek Engineering Fundamentals of the InternalCombustion Engine Pearson Prentice Hall 2nd edition 2004
[25] D Q Mayne J B Rawlings C V Rao and P O ScokaertldquoConstrained model predictive control stability and optimal-ityrdquo Automatica vol 36 no 6 pp 789ndash814 2000
[26] G Y Li Application of Intelligent Control and MATLAB to Elec-tronically Controlled Engines Publishing House of ElectronicsIndustry Beijing China 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of