rehabilitation robotics using central pattern generators · rehabilitation robotics using central...
TRANSCRIPT

Rehabilitation robotics using Central Pattern Generators
Student: Sarah MOUSSOUNISupervisors : Renaud RONSSE
Mohamed BOURIProfessor : Auke Jan IJSPEERT
Master ProjectMid-term Presentation
April 28th,2010

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
� Investigation of a rehabilitation protocol based on the theory of adaptive oscillator.
� Implementation of the method on the Knee orthosis
Goals of the project
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI2
� Test of the method with various movements
� Validation of the method on healthy people
� Design of a preliminary rehabilitation protocol.

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
� Presentation of the Knee orthosis� SIMULINK modeling
Preliminary work on the Knee-orthosis
Plan
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI3
� Preliminary work on the Knee-orthosis� First implementation : transparent mode� Conclusion and future work

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
� Rehabilitation robot� One degree of freedom� Position and force sensors
Environment : Knee Orthosis
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI4
KneeOrthosis
Torque Γ
Orthosis Position
Measuredforce

Integration of the CPG system
Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Timeline
MeasurementSys
characterizationControl
Modeling the System
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI5
Control
Test & validation SimuLink + Matlab
Test & validation FlexWare + Orthosis
Test & validation FlexWare + Orthosis

Integration of the CPG system
Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Timeline : MatLab – Simulink implementation
MeasurementSys
characterizationControl
Modeling the System
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI6
Control
Test & validation SimuLink + Matlab
Test & validation FlexWare + Orthosis
Test & validation FlexWare + Orthosis

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Model and simulation
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI7
Torque

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
CPG & torque estimator
Adaptive oscillatorForce
controller
Measured
Measured force
DesiredForce
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI8
Torque estimator
Measuredposition
Signal estimation : position, velocity and acceleration

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
CPG & torque estimator
Dynamical model + Orthosis Position controller
Adaptive oscillator
Measuredposition
x
y
wSignal
Estimator
Position
Velocity
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI9
w
Amplitude
Offset
EstimatorAcceleration

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Timeline: Force
Integration of the CPG system
MeasurementSys
characterizationControl
Modeling the System
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI10
Control
Test & validation SimuLink + Matlab
Test & validation FlexWare + Orthosis
Test & validation FlexWare + Orthosis

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Implementation : Material
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI11

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Implementation: Transparent mode
� 1st Objective:
Make the orthosis transparent for the user
� 5 Steps :
1
Knee orthosis
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI12
Force measured
Digital analogue value
(Volt) Calibration
Volt => NewtonInterpolation Filtering
ControlApplied torque
2 34
5

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Implementation: Calibration & Interpolation
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI13

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
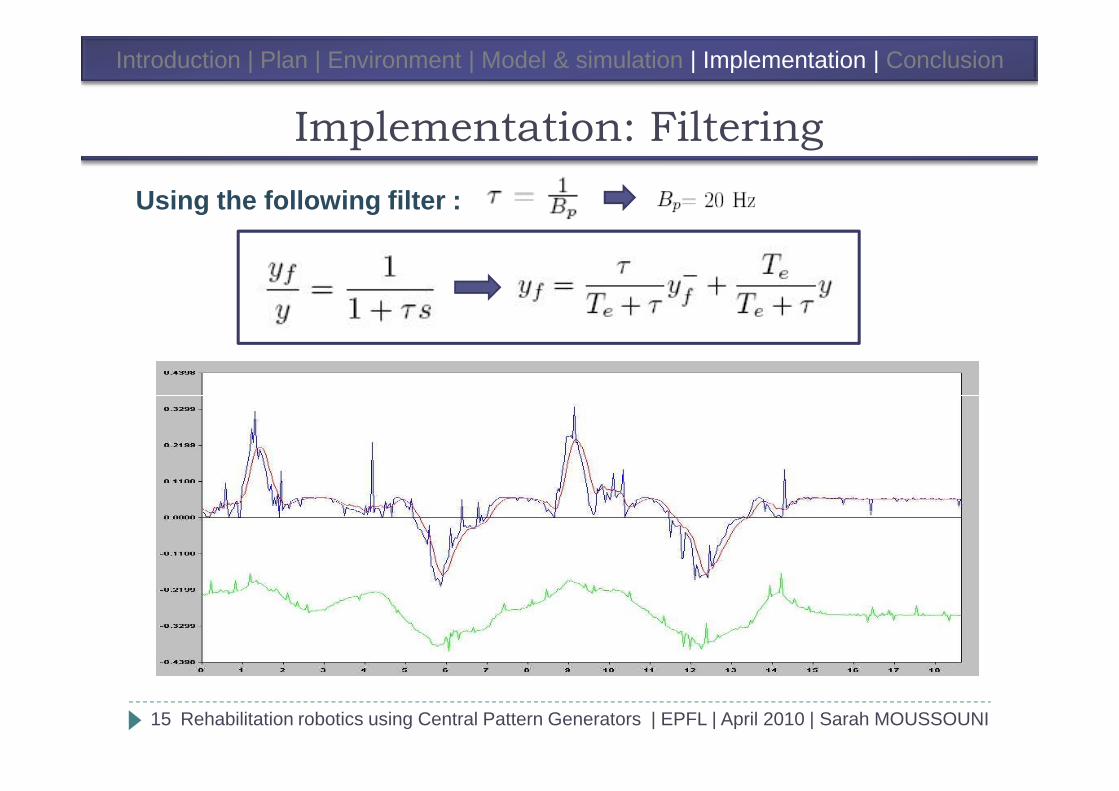
Implementation: Filtering
Using the following filter :
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI14
Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Implementation: Filtering
Using the following filter :
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI15
Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
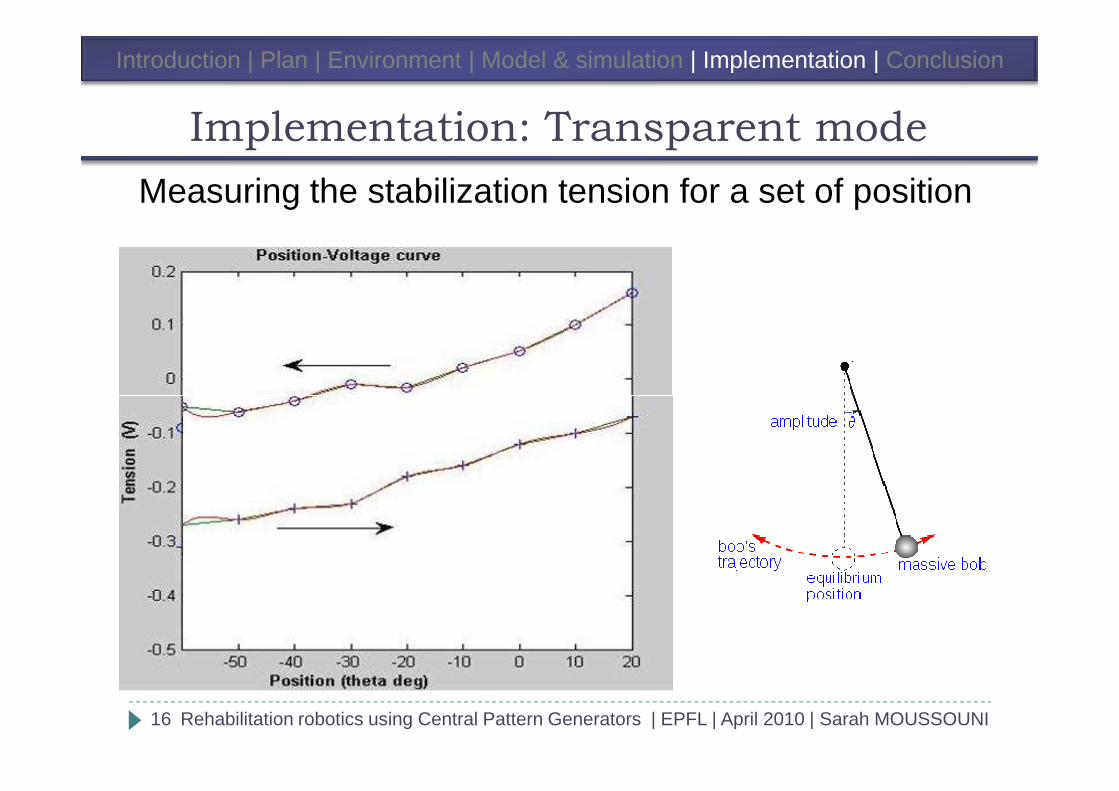
Measuring the stabilization tension for a set of position
Implementation: Transparent mode
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI16

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Implementation: Transparent mode
Measuredposition
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI17
Measuredforce
+-
Desired force =0
+
PID Controller

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Implementation: Transparent mode
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI18

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Timeline : Integrating CPG
Integration of the CPG system
Processing the force sensors measurement
Modeling the System
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI19
Test & validation SimuLink + Matlab
Test & validation FlexWare + Orthosis
Test & validation FlexWare + Orthosis

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
� Test of the method with various movements
� Validation of the method on healthy people
Future work
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI20
� Design of a preliminary rehabilitation protocol.
� Work on the LAMBDA robot

Introduction | Plan | Environment | Model & simulation | Implementation | Conclusion
Questions ?
Rehabilitation robotics using Central Pattern Generators | EPFL | April 2010 | Sarah MOUSSOUNI21