randomized motion planning: from intelligent cad to digital actors to protein folding nancy m. amato...
TRANSCRIPT

Randomized Motion Planning: From Intelligent CAD to Digital Actors
to Protein Folding
Nancy M. AmatoDepartment of Computer Science
Texas A&M University
http://www.cs.tamu.edu/faculty/amato/
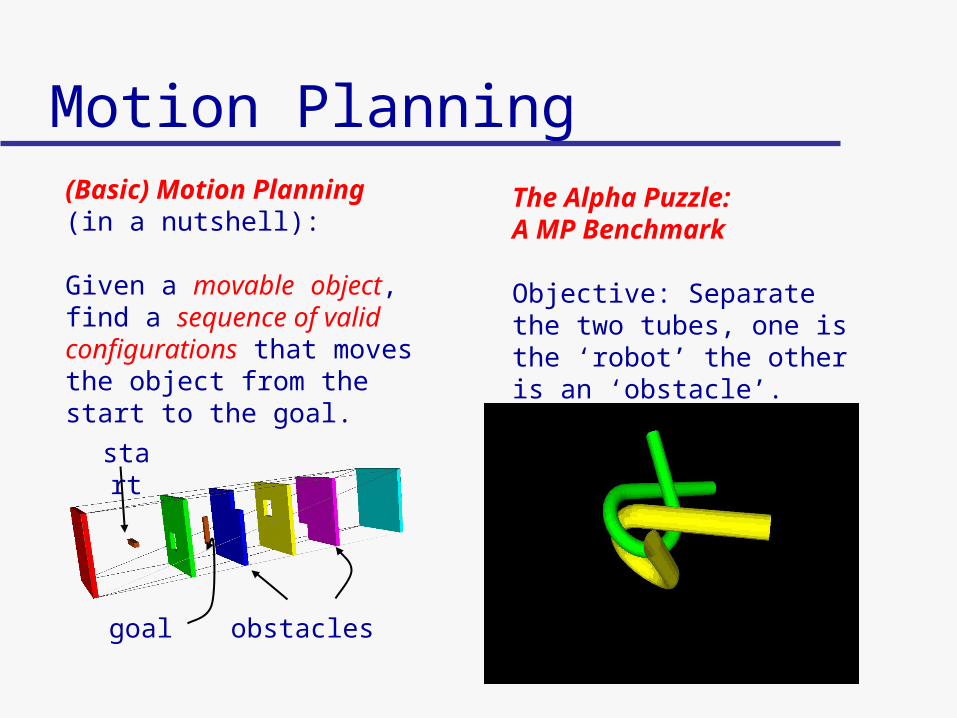
The Alpha Puzzle: A MP Benchmark
Objective: Separate the two tubes, one is the ‘robot’ the other is an ‘obstacle’.
Motion Planning
start
goal obstacles
(Basic) Motion Planning (in a nutshell):
Given a movable object, find a sequence of valid configurations that moves the object from the start to the goal.

A (Dis)Assembly Problem: The Pentamino Puzzle
Hard Motion Planning Problems:Intelligent CAD Applications
Using Motion Planning to Test Design Requirements:Requirements, such as accessibility for servicing or assembly, were tested with physical “mock ups”. Digital testing saves time and costs, is more accurate, and enables more extensive testing.
Maintainability Problems: Mechanical Designs from GE
find part removal path
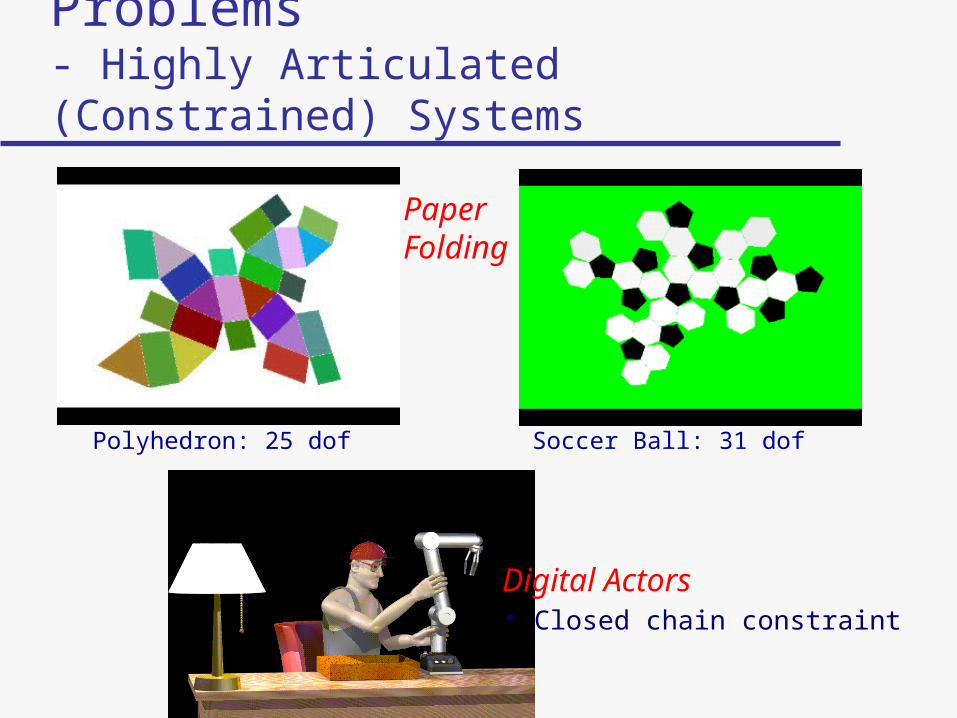
Soccer Ball: 31 dofPolyhedron: 25 dof
Hard Motion Planning Problems - Highly Articulated (Constrained) Systems
Digital Actors• Closed chain constraint
Paper Folding

Hard Motion Planning Problems:Deformable Objects
Given a deformable object, find a path for the object that can be transformed into a collision free path by deforming the object.

Hard Motion Planning Problems:Flocking: Covering, Homing, Shepherding

Hard Motion Planning Problems- computational biology & chemistry
Protein Folding - find folding pathways
Drug Design-molecule docking

Outline
• C-space, Planning in C-space (basic definitions)
• Probabilistic Roadmap Methods (PRMs)• PRM variants (OBPRM, MAPRM) • User-Input: Haptically Enhanced PRMs
• PRMs for more `complex’ robots• deformable objects • flocking behaviors• Computational Biology: protein folding & ligand binding
• Other Projects & Future Work• Neuron PRM - using PRM framework to construct cortical networks!
• Mobile Robot Navigation and Localization – more PRMs
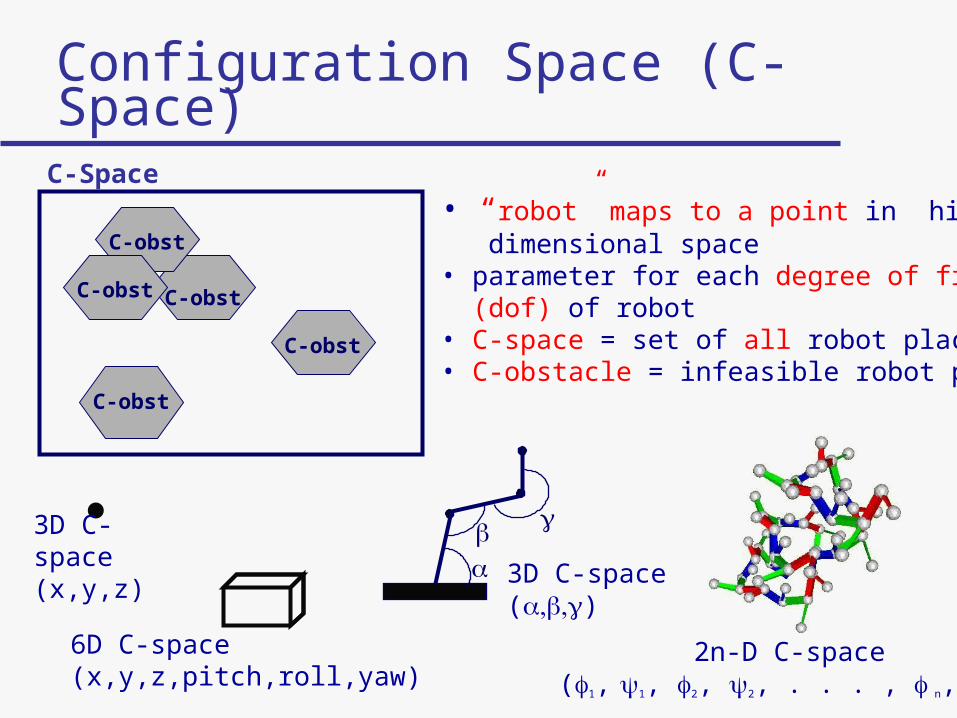
Configuration Space (C-Space)
C-obst
C-obst
C-obst
C-obst
C-obst
C-Space
6D C-space(x,y,z,pitch,roll,yaw)
3D C-space(x,y,z) 3D C-space
()
• “robot” maps to a point in higher dimensional space • parameter for each degree of freedom (dof) of robot• C-space = set of all robot placements • C-obstacle = infeasible robot placements
2n-D C-space(1, 1, 2, 2, . . . , n, n)

robot
obst
obst
obst
obst
xy
C-obst
C-obstC-obst
C-obst
robot Path is swept volume
Motion Planning in C-space
Path is 1D curve
Workspace
C-spaceSimple workspace obstacle transformed Into complicated C-obstacle!!
Most motion planning problems of interest are PSPACE-hard [Reif 79, Hopcroft et al. 84 & 86]
The best deterministic algorithm known has running time that is exponential in the dimension of the robot’s C-space [Canny 86]
• C-space has high dimension - 6D for rigid body in 3-space• simple obstacles have complex C-obstacles impractical to compute explicit representation of freespace for more than 4 or 5 dof
So … attention has turned to randomized algorithms which • trade full completeness of the planner• for probabilistic completeness and a major gain in efficiency
The Complexity of Motion Planning
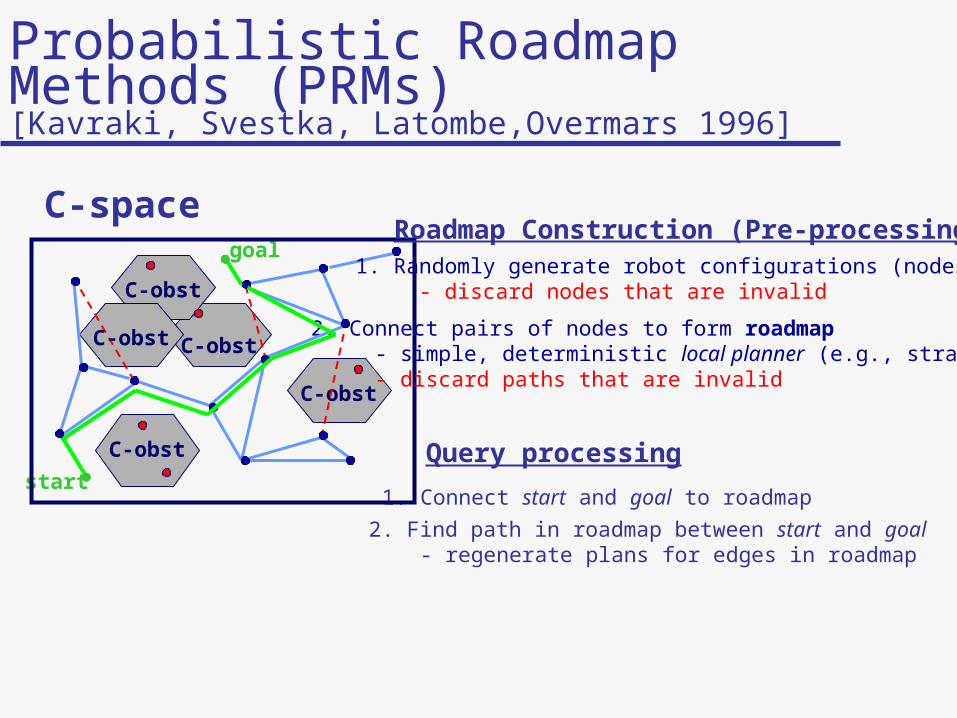
1. Connect start and goal to roadmap
Query processingstart
goal
Probabilistic Roadmap Methods (PRMs)[Kavraki, Svestka, Latombe,Overmars 1996]
C-obst
C-obst
C-obst
C-obst
Roadmap Construction (Pre-processing)
2. Connect pairs of nodes to form roadmap - simple, deterministic local planner (e.g., straightline) - discard paths that are invalid
1. Randomly generate robot configurations (nodes) - discard nodes that are invalid
C-obst
C-space
2. Find path in roadmap between start and goal - regenerate plans for edges in roadmap

PRMs: Pros & Cons
PRMs: The Good News1. PRMs are probabilistically complete2. PRMs apply easily to high-dimensional C-space3. PRMs support fast queries w/ enough preprocessing
Many success stories where PRMs solve previously unsolved problems
C-obst
C-obst
C-obst
C-obst
C-obst
start
goal
PRMs: The Bad News
1. PRMs don’t work as well for some problems:– unlikely to sample nodes in narrow passages– hard to sample/connect nodes on constraint surfaces
Our work concentrates on improving PRM performance for such problems.
start
goal
C-obst
C-obst
C-obst
C-obst

Related Work
•Probabilistic Roadmap Methods• Uniform Sampling (original) [Kavraki, Latombe, Overmars, Svestka, 92, 94, 96]• Analysis of Basic PRM [Kavraki/Latombe/Motwani/Raghavan 98]
• PRM Roadmaps in Dilated Free space [Hsu et al, 98]
• Gaussian Sampling PRMs [Boor/Overmars/van der Steppen 99]
• PRM for Closed Chain Systems [Lavalle/Yakey/Kavraki 99]• PRM for Flexible Objects [Kavraki/Lamireaux/Holleman 98]• Visibility Roadmaps [Laumond et al 99]
• Using Medial Axis of Workspace [Kavraki et al 99, Lin/Manocha et al 00]• Generating Contact Configurations [Xiao et al 99]
• Related Methods•Ariadnes Clew Algorithm [Ahuactzin et al, 92]
• RRT (Rapidly Exploring Random Trees) [Lavalle/Kuffner 99]
Smarter Sampling Methods
Goal: Sample nodes in Narrow Passages•OBPRM: Obstacle-Based PRM• MAPRM: Medial-Axis PRM

OBPRM: An Obstacle-Based PRM[IEEE ICRA’96, IEEE ICRA’98, WAFR’98]
start
goal
C-obst
C-obst
C-obst
C-obst
To Navigate Narrow Passages we must sample in them• most PRM nodes are where planning is easy (not needed)
PRM Roadmap
start
goal
C-obst
C-obst
C-obst
C-obst
Idea: Can we sample nodes near C-obstacle surfaces?• we cannot explicitly construct the C-obstacles...• we do have models of the (workspace) obstacles...
OBPRM Roadmap

1
3
2
45
OBPRM: Finding Points on C-obstacles
Basic Idea (for workspace obstacle S)
1. Find a point in S’s C-obstacle (robot placement colliding with S)2. Select a random direction in C-space3. Find a free point in that direction4. Find boundary point between them using binary search (collision checks)
Note: we can use more sophisticated heuristics to try to cover C-obstacle
C-obst

OBPRM for Paper FoldingAnimations - some difficult examples
Box: 12 => 5 dof Periscope: 11 dof
Roadmap Statistics• 218 nodes, 3 sec
Roadmap Statistics• 450 nodes, 6 sec

MAPRM: Medial-Axis PRM[IEEE ICRA’99, ACM SoCG’99]
• Key Observation: We can efficiently retract almost any configuration, free or not, onto the medial axis of the free space without computing the medial axis explicitly.
C-obstacle
Medial axis
Basic Retraction Approach• sample point c in C-Space• find closest C-obst boundary b• if c in collision, push past b until free• push c away from b until have two closest points (on medial axis now)

MAPRM: Significance
Theorem: Sampling and retracting can increase the #nodes in narrow corridors in a way that is independent of the corridor’s volume (depends on volume that bounds corridor).
C-obstacle
PRM(uniformsampling)
Probability PRM node in corridor
C-obstacle
MAPRM
where maps colliding nodes to closest boundary point
Probability MAPRM node in corridor

MAPRM: Current Status
• Approximate method implemented for higher dimensional C-spaces – Methods to compute, approximately:
– clearance in C-space– penetration depth in C-space
• Now our method of choice for most applications

Hybrid Human/Planner System [IEEE ICRA’01, IEEE ICRA’00, PUG’99]
1. Planner creates initial roadmap2. User collects approximate path P
(has collisions)– a haptic device is ideal for this
3. Planner fixes P (pushes to C-free)– techniques inspired by OBPRM
ideal for this
Automatic planners are good, but…
Enhancing PRMs with Haptic Hints
Sometimes can’t find critical configurations obvious to the user
C-obstacle
C-obstacleapproximate
path generatedby user
pushedpath generated
by planner
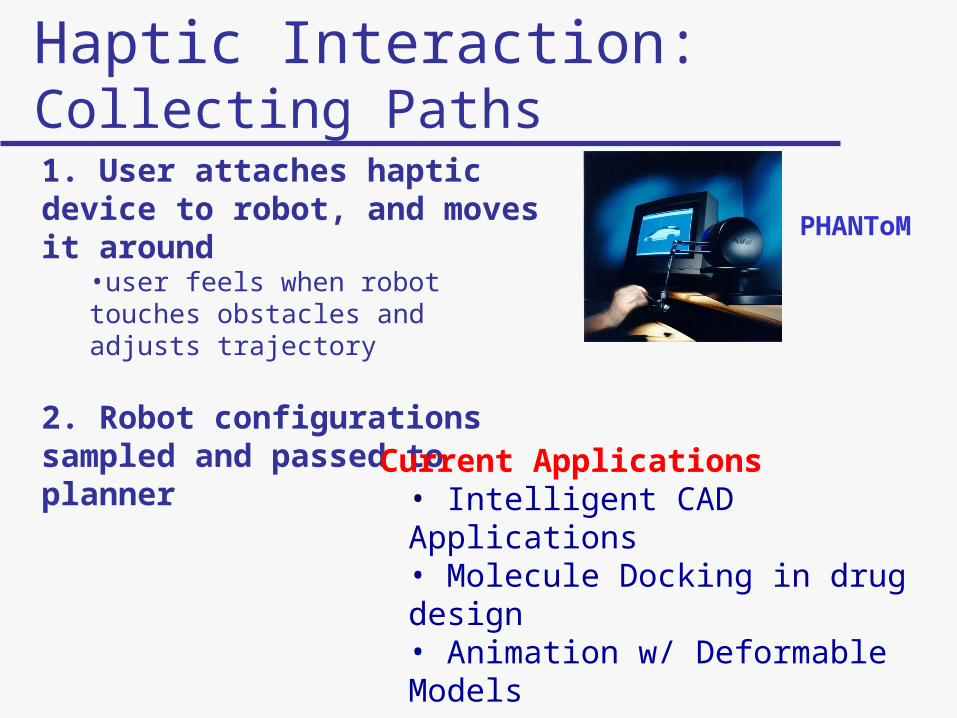
PHANToM 1. User attaches haptic device to robot, and moves it around
•user feels when robot touches obstacles and adjusts trajectory
2. Robot configurations sampled and passed to planner
Haptic Interaction: Collecting Paths
Current Applications• Intelligent CAD Applications• Molecule Docking in drug design • Animation w/ Deformable Models

0
500
1000
1500
2000
2500
3000
3500
time (sec)
OBPRMhaptic pushiterative push
Haptic Hints: Results
Flange Problem
0.85 0.95 1

Problem:Given a deformable object, find a path for the object so that it can achieve the goal by deforming on the way.
Deformable Objects
Our Approach:• Find a path for a rigid version of robot
(may have collisions)
• Deform the robot to avoid the collisions

Goal
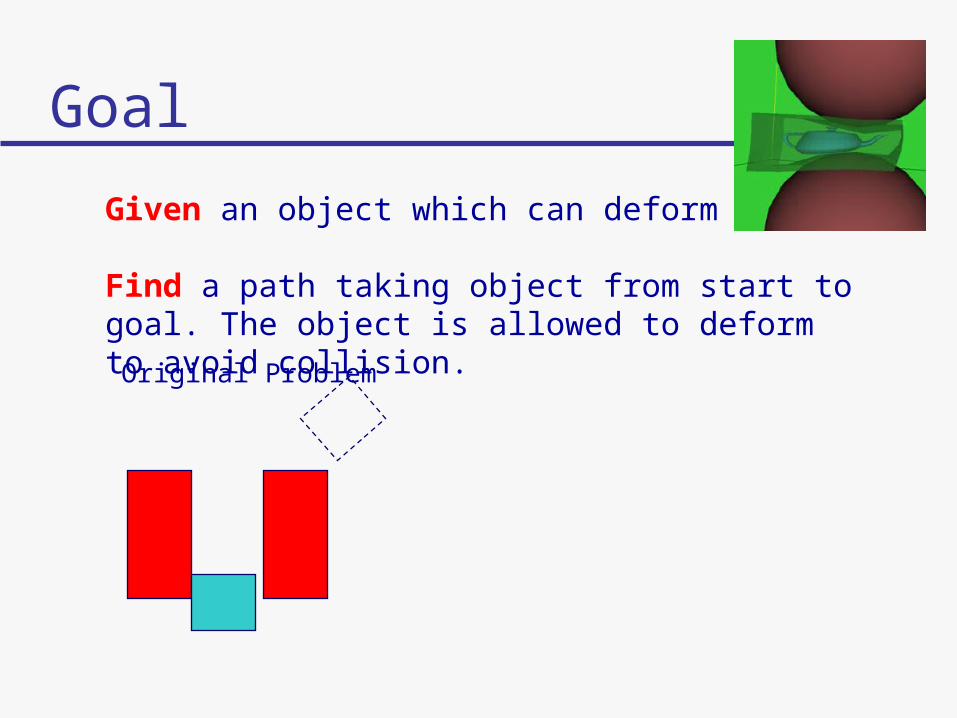
Original Problem
Start
Goal
Robot
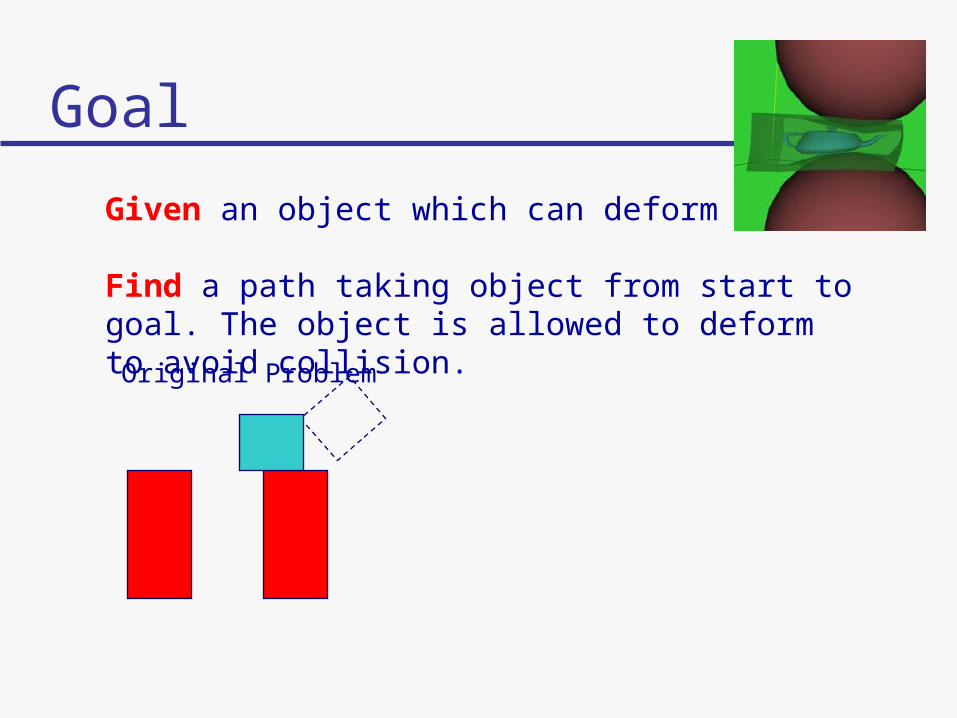
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.
Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.
Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
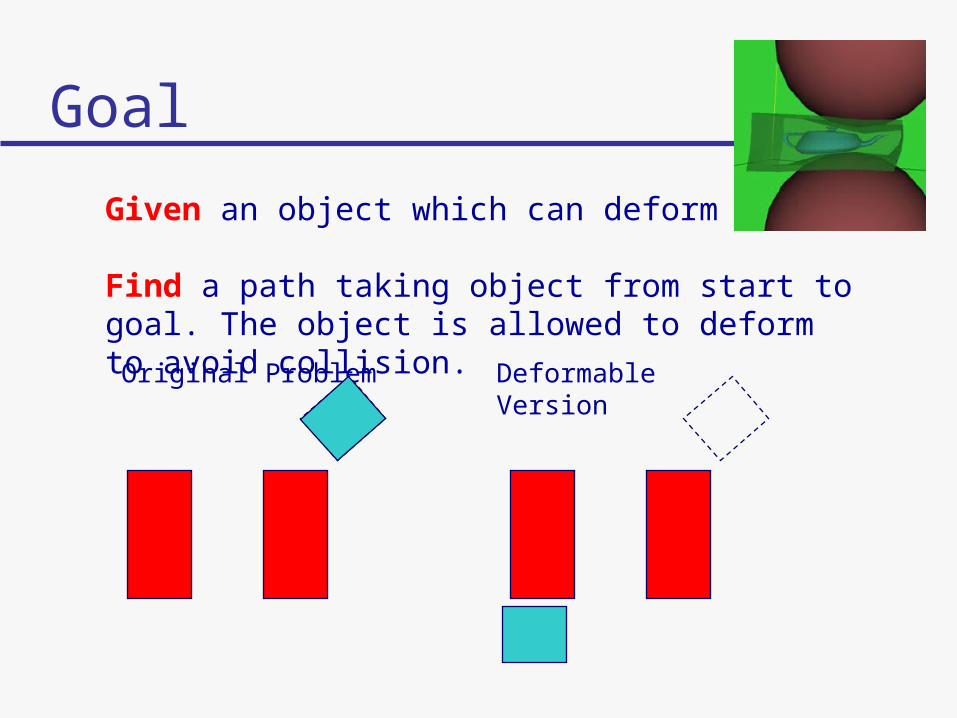
Original Problem Deformable Version
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem Deformable Version
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.
Goal
Original Problem Deformable Version
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem Deformable Version
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem Deformable Version
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem Deformable Version
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem Deformable Version
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem Deformable Version
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem Deformable Version
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Goal
Original Problem Deformable Version
Given an object which can deform
Find a path taking object from start to goal. The object is allowed to deform to avoid collision.

Approximate Solution
• Enable Penetration– Use approximate C-Space penetration
• Use scaled robots– More than one scaled model. – Smaller (Bigger ) model needs more (less) deformation.
1. Build roadmap, relaxing collision free requirement
2. Extract Approximate Path may not be feasible for the rigid robot

Approximate Solution
Query
The approximate path returned is not the shortest path but the energetically most feasible path (less deformation required)
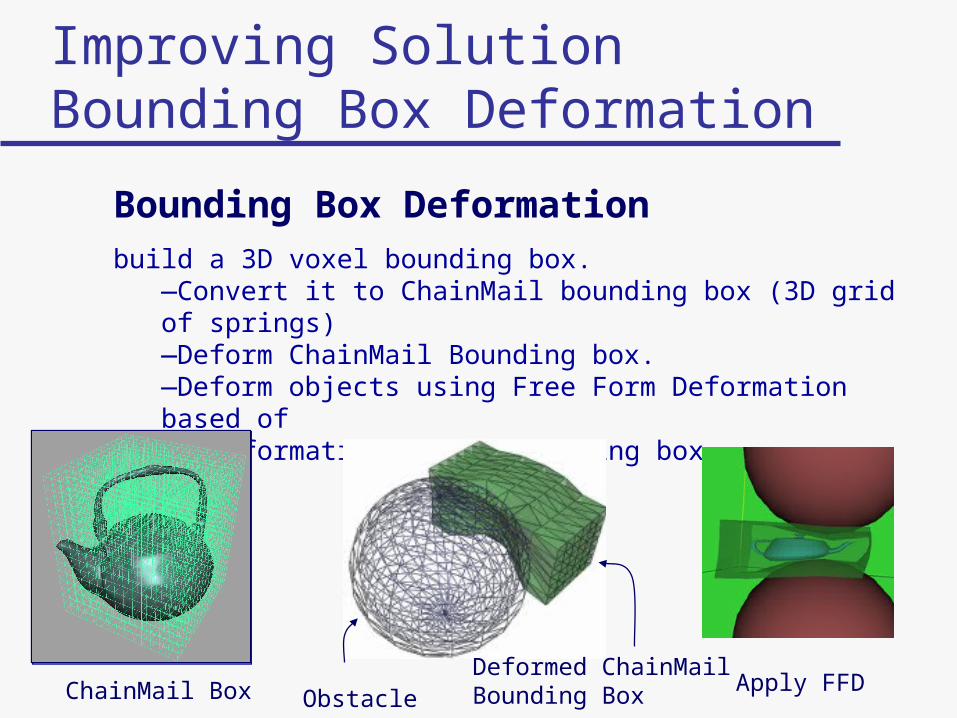
Improving SolutionBounding Box Deformation
Bounding Box Deformationbuild a 3D voxel bounding box.
—Convert it to ChainMail bounding box (3D grid of springs)—Deform ChainMail Bounding box.—Deform objects using Free Form Deformation based of deformation of the bounding box.
Deformed ChainMail Bounding BoxObstacleChainMail Box Apply FFD
Group Behaviors Flocking System
What is a flocking system?– System simulating behaviors of groups of objects
(e.g. a school of fish, crowds…)– flock formation is selfish
Applications– Computer graphics, VR, games– Robotics– Biological/ecological simulation
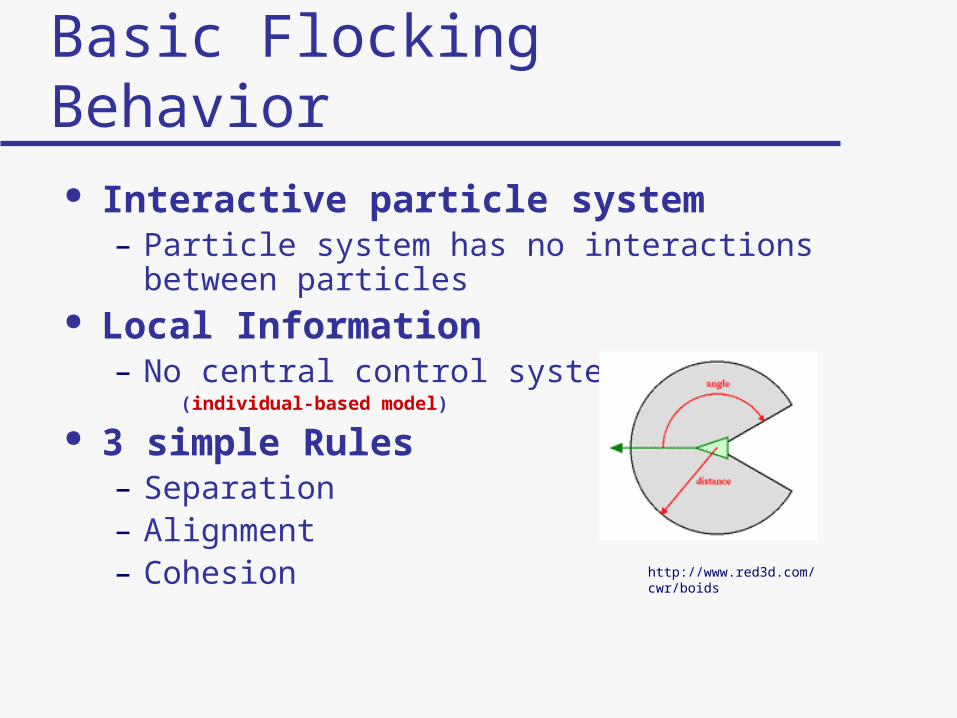
Basic Flocking Behavior Interactive particle system
– Particle system has no interactions between particles
Local Information– No central control system (individual-based model)
3 simple Rules– Separation – Alignment– Cohesion http://www.red3d.com/cwr/boids

Problem with Basic flocking
Always emergent behavior– only local information is used– No memory
most creatures are not so stupid. At least they usually have memory.
– Can’t do complex tasks, like searching. Can we have more complex behaviors?
– Yes! Using global knowledge.– However, we need to use it very carefully.
this means we don’t want our creatures to be too smart No creature will have complete/perfect information about global information.

Adaptive Roadmaps
Yes, of course, Roadmaps!– Encodes global information. (e.g.
topology)– Facility to access global information.
Adaptive roadmap edge weights Provides indirect and cheap way to communicate between flockmates. (inspired from ant colony optimization)

Behaviors using Adaptive Roadmap
Using global information encoded in roadmap we can generate “good” complex behaviors.
Roadmaps are generated using MAPRM. Experiments including:
– Homing– Covering– Goal Searching– Shepherding

Flocking Behaviors: Covering
Mine sweeping : covering the environment. A point p is “covered” if p is in the visibility
range of one or more flock member. Similar to ant colony optimization
Memory is a list of roadmap nodes that are visited by the boid.
Probability of each edge been selected based on its weight. Edge with Smaller weight has higher probability to be selected.

Flocking Behaviors: Covering

Flocking Behaviors: Covering
- 50 flock members
-Environment size: 80 m *100 m
-Sensory range: 5 m
Scene overview
Flocking Behaviors: Goal Searching
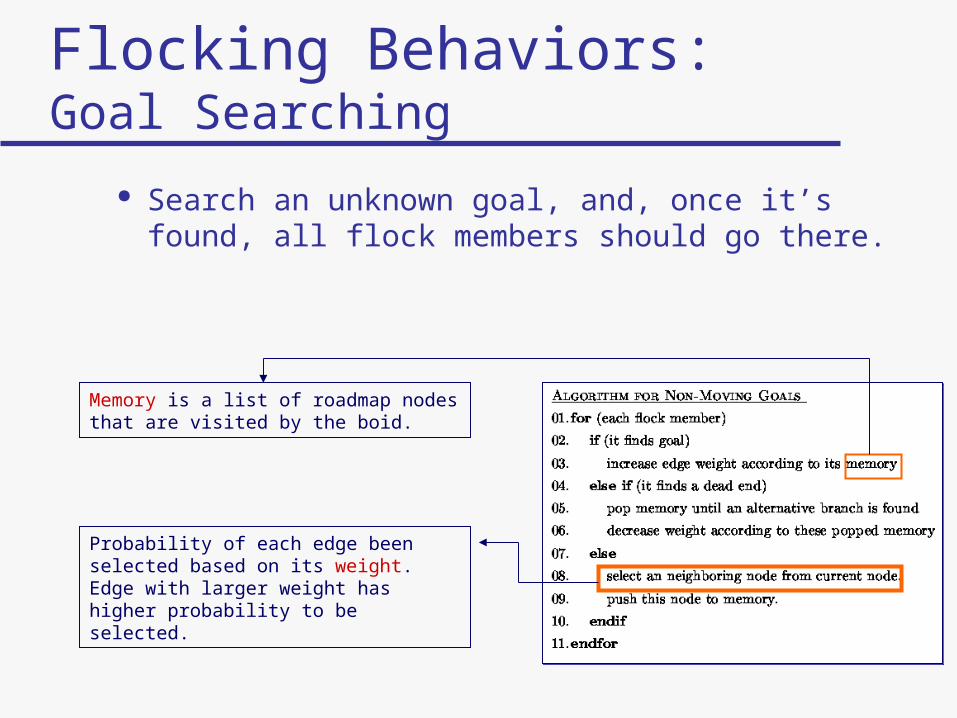
Search an unknown goal, and, once it’s found, all flock members should go there.
Probability of each edge been selected based on its weight. Edge with larger weight has higher probability to be selected.
Memory is a list of roadmap nodes that are visited by the boid.
Flocking Behaviors: Goal Searching

Flocking Behaviors: Goal Searching
- 50 flock members
-Environment size: 80 m *100 m
-Sensory range: 5 m
Scene overview

Flocking Behaviors: Homing
Flocking Behaviors: Shepherding

Protein folding is a “grand challenge” problem in biology - the deciphering of the second half of the genetic code.
Our focus: “… use the protein’s known 3D structure to predict the kinetics and mechanism of folding” [Munoz & Eaton, PNAS’99]
– Study protein folding pathways, folding landscape, and kinetics.– Will assist in understanding folding and function.
Protein structure prediction: given a protein’s amino acid sequence, predict its 3D structure.
Protein Folding

The parallel:between paper folding and protein folding
Folding paths of a periscope and a 10-ALA peptide chain.
unfolded folded

Protein Folding[RECOMB’01, IEEE ICRA’01]
Secondary Structure
helix sheet
+ +variable
loops =
Tertiary Structure
TTCCPSIVARSNFNVCRLPGTPEALCATYTGCIIIPGATCPGDYAN
Primary Structure
Genomic sequence(nucleotide sequence)
Protein sequence(amino acid sequence)
Protein structure => function
Better Treatments, Better drugs, etc
One amino acid
Energy minimum
The Problems1. Predict Tertiary Structure from
Primary Structure 2. Determine folding pathway to known
tertiary structure (our current focus)

Probabilistic Roadmap Methods (PRMs)
for Protein Folding (overview)
Native state
Construct the roadmap:1. Generate nodes.2. Connect to form roadmap
The Roadmap is like a net being laid down on protein’s potential landscape.
A conformation
Conformation space
PotentialNow the roadmap can be used:1. To find a path2. To extract multiple paths

Configuration Space(one parameter for each dof)
robot (rigid, articulated, etc)
Collision Detector
collision free paths
Conformation Space(phi/psi angles)
protein(articulated linkages)
Potential Calculation
energetically feasible paths
Both can use the same motion planning framework in an abstract C-space.
PRMs for Protein Folding
C-Space
Moving Object Model
Validity Check
Roadmap Construction(A connectivity graph)
Query (find valid path)

Model of a protein
amino acid: pair of phi/psi angles protein: a sequence of amino acids.
– conformation node is:

• Take advantage of the known native state.• map the potential landscape/funnel leading to it.• sample around it and gradually grow out. • generate conformations by randomly selecting phi/psi angles
• Criterion for accepting a node: Compute potential energy E of each node and retain it with probability P(E):
PRM: Node GenerationN

PRM: Node Generation
Start with native structure.
Gradually grow out.
Denser distribution around native state
Native state

PRM: Roadmap Connection
1. Find k closest nodes for each roadmap node
2. Assign edge weight to reflect energetic feasibility:
lower weight more feasible [Singh, Latombe, Brutlag, 1999]
Native state

PRMs for Protein Folding: Key Issues
• Validation– In RECOMB ‘01 (Song & Amato), our results
validated with hydrogen exchange experiments. [Li & Woodward 1999]
• Energy Functions– The degree to which the roadmap accurately
reflects folding landscape depends on the quality of energy calculation.

Results: Folding Potential Landscape
Secondary structure formation order– timed contact map– experimental validation
Studying Folding Kinetics– 2-state folding kinetics– calculation of folding rates– identifying 2-state, 3-state, … k-state kinetics

Potential landscape of a protein
could be very complicated
different proteins different landscapes different folding behaviors
a landscape may have several channels– channel A: 2-state kinetics– channel B: 3-state kinetics
Native state
Conformation space
Potential

Distributions for different types:Potential Energy vs. RMSD for roadmap nodes
all alpha alpha + beta all beta
Secondary structure formation order
Secondary structure formation order– Timed contact map– Experimental validation
(A few in RECOMB’01, more here.)

Timed Contact Map:formation order for a Path
protein G (domain B1)
(IV: 1-4)
140 143
140 143 140
141 142 144
139 143 143 114
142135
131
1-4
3-4Average T = 142 Formation order:, 3-4, 1-2, 1-4
residue #
resid
ue #
1-2
Validating Folding Pathways
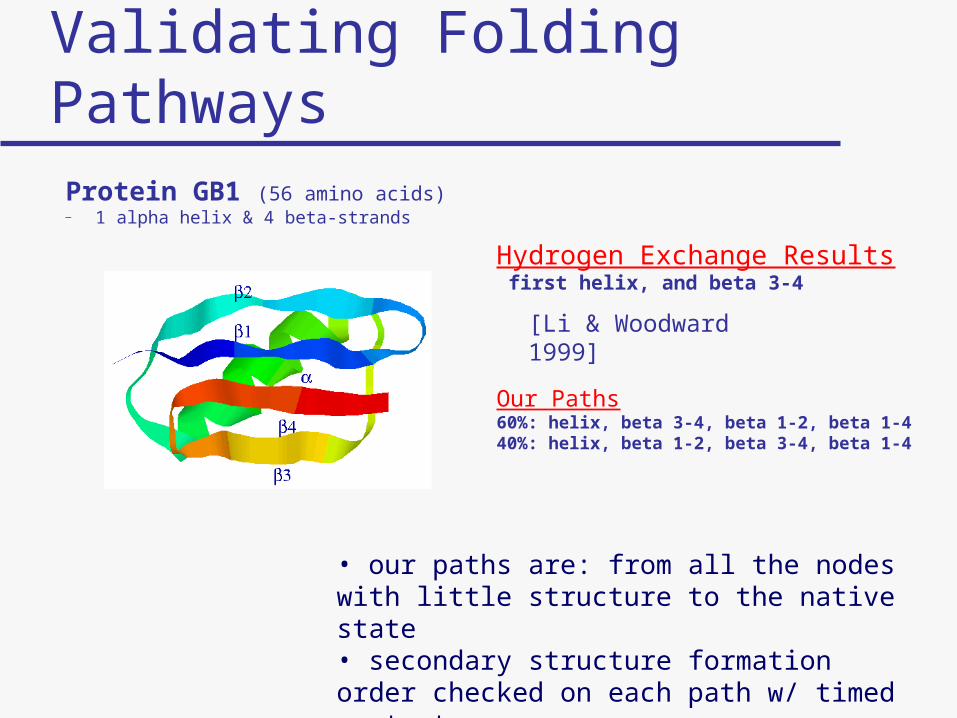
Protein GB1 (56 amino acids)— 1 alpha helix & 4 beta-strands
Hydrogen Exchange Results first helix, and beta 3-4
Our Paths 60%: helix, beta 3-4, beta 1-2, beta 1-440%: helix, beta 1-2, beta 3-4, beta 1-4
[Li & Woodward 1999]
• our paths are: from all the nodes with little structure to the native state• secondary structure formation order checked on each path w/ timed contact map

Validating Folding Pathways
Protein A (60 amino acids)— 3 alpha helices
Hydrogen Exchange Results 3 helices form about the same time
Our Paths agree, central helix (2) usually last
[Li & Woodward 1999]

Validating Folding Pathways
CI2 (64 amino acids)— 1 alpha helix and 5 beta strands
Hydrogen Exchange Results helix, betas 2 and 3
Our Paths helix, beta 3-4 and 2-3 helix clearly first, then contacts form involving beta 3 and betas 2 and 4
[Li & Woodward 1999]

Secondary structure formation order and validation
•Proteins primarily from [Munoz & Eaton PNAS’99] for comparison purposes
•Contact us if you want us to analyze your proteins!
PDB name Num of Residues
2nd structures Comparison w/ Exp.
[Li & Woodward ’99]
1GB1 56 1 alpha + 4 beta Agreed
1BDD 60 3 alpha Agreed
1SHG 62 5 beta N/a
1COA 64 1 alpha + 4beta Agreed
1SRL 64 5 beta N/a
1CSP 67 7 beta N/a
1NYF 67 3 beta N/a
1MJC 69 7 beta N/a
2AIT 74 7 beta N/a
1UBQ 76 1alpha + 5 beta Agreed
1PKS 79 1 alpha + 5 beta N/a
1PBA 81 3 alpha + 3 beta N/a
2ABD 86 5 alpha N/a
1BRN 110 3 alpha + 7 beta Not sure

Summary: comparison of models for protein folding
Folding landscape
Trajectory
(path #)Path quality
Time dependent
(running time)
Folding kinetics
Native state needed
Molecular Dynamics
No Yes (1) good Yes.
(very long)
No No
Monte Carlo
No Yes (1) good Yes
(very long)
No No
Statistical
Model
Yes No N/A No (short) Yes (only average)
Yes
Our PRM approach
Yes Yes, (many)
approximate No (short) Yes, multiple kinetics
Yes
Lattice model
Not used on real proteins

Protein Folding Summary
• PRM roadmaps approximate folding landscapes• Efficiently produce multiple folding pathways
– Secondary structure formation order– better than trajectory-based simulation methods, such as
Monte Carlo, molecular dynamics
• Provide a good way to study folding kinetics – multiple folding kinetics in same landscape (roadmap)– natural way to study the statistical behavior of folding– more realistic than statistical models (e.g. Lattice models,
Baker’s model PNAS’99, Munoz’s model, PNAS’99)

Given: an description of a ligand molecule (robot) and a protein (obstacle).
Find: a configuration of the ligand near the protein where geometric, electro-static and chemical constraints are satisfied.
Ligand Binding[IEEE ICRA`01]
protein
ligand

Ligand Binding[IEEE ICRA`01]
• Automated docking algorithms– AutoDock,Dock,FlexX,FLOG,FTDock,Gold, etc.
• PRM Approach (Singh, Latombe, Brutlag, 1999)
– rapidly explores high dimensional space– We use OBPRM: better suited for generating conformations
in binding site (near protein surface)
• Haptic User interaction– haptics (sense of touch) helps user understand molecular
interaction– User assists planner by suggesting promising regions, and
planner will post-process and ‘improve’
Conclusions
Diverse problems can be addressed using appropriate adaptations of PRMs
• key is defining appropriate models and their C-spaces• validation check is very general - ranging from traditional collision detection to potential energy thresholds to ...
More info and Movies:http://www.cs.tamu.edu/faculty/[email protected]
Joint work with: O. Burchan Bayazit, Guang Song, Jyh-Ming Lien, Shawna Thomas, Steve Wilmarth, and the other members of our group.