proceedings of the institute of vehicles 4…100)2014/057_069.pdf · proceedings of the institute...
TRANSCRIPT

PROCEEDINGS OF THE INSTITUTE OF VEHICLES 4(100)/2014
57
Michał Maniowski
1
OPTIMIZATION OF WHEEL SUSPENSION DAMPERS
IN OFF-ROAD RALLY CAR
1. Introduction
In car rallies the wheel suspensions and chassis parameters, composing the rally car
setup, are changed depending on a track features in order to increase the car-driver
performance. Typically, it is achieved by using trial and error methods during many road
tests [1, 2]. However, this task is extremely demanding due to dozens of control
parameters and evaluation criteria, nonlinear and dynamic response of the object [15].
In order to reduce time and costs of rally car preparation, modern computer methods
are utilized here involving car modelling and optimization [6]. Firstly, the rally car
model is formulated that describes relationships between the car performance and
characteristics of tuneable components of the car chassis [10]. In this paper focus is put
on wheel suspension dampers only. The model for optimization must strike a suitable
balance between accuracy and computational time. Next, the most important objective
quality factors are defined, which constitute an economic set and correlate well with a
subjective evaluation of the car by the rally driver [14]. Finally, multi-objective
optimization algorithm, based on Genetic Algorithms, is utilized for finding the best set
of damping characteristics.
Numerical example deals with an actual ORCA car (built in T1 FIA specifications),
that for many years taken a part in polish and international off-road Baja type rallies with
a few champion titles [14]. Thanks to cooperation in years 2006-2007 with Technical
Centre Cracow of BWI Group Poland (producer of dampers, former “Delphi”) [13] it
was possible to build, measure and tune many dampers for this specific application.
The presented topic belongs to developed by the author projects of increasing
performance of driver-car system in motorsport applications [5, 7, 9]. Other information
concerning an influence of damping characteristics on car performance can be found in
[3, 11] for FWD race car, in [12] for RWD race car and in [4] for FWD rally car.
2. Model of shock absorbers
Damping system utilized in top off-road rally(T1 - FIA group) cars [15] should be
characterized by (Fig.1):
- telescopic modules with dampers and coil springs enabling 250 mm of the
wheel suspension stroke;
- doubled monotube dampers with external reservoirs and air ducks for cooling;
- upside down dampers configuration;
- hydraulic valves external setup (with many independent ranges, deep and linear
modulation);
- damping characteristics invariant in time and temperature;
- additional functions, like hydraulic bump stop.
1 Michał Maniowski, PhD., Eng., Institute of Automobiles and IC Engines, Cracow University of Technology

58
Fig. 1. View of front wheel suspension of top off-road rally car [15]
Different modelling strategies for hydraulic dampers used in vehicle dynamics are
compared in [8] with respect to obtained accuracy, computation time and cost of
parameters estimation. The author preferred model of damper for the considered here
optimization task, is described by:
- piece-wise approximation with nonlinear algebraic functions of back-bone
damping characteristics,
- damper hysteresis emulated by a rheological model,
- nonlinear gas force.
The formulated damper model is parameterized (Tab.1) in order to simulate
damping characteristics for different valve systems (Fig.2), utilized in sport applications
for tuning the damper forces. Typical solutions start with one parameter regulated (1-
way, high speed rebound) and are enhanced by 2, 3 and 4 (4-way, low and high speed
rebound, low and high speed compression) parameters for damping changes. Even more
can be obtained by rebuilding the damping valves, but this requires suitable facilities
[13].

59
Fig.2. Sample ranges of possible damping characteristics of 4-way damper [15]
Table 1. Comparison of regulated ranges of damping characteristics (ref. Fig.2)
Damper
type
compression
low speed
compression
high speed
rebound
low speed
rebound
high speed
1-way const const const var(d1)
2-way const var(d1) const var(d2)
3-way const var(d1) var(d2) var(d3)
4-way var(d1) var(d2) var(d3) var(d4)
3. Model of off-road rally car
An off-road rally car is modelled as multibody system with discrete parameters
[6,10]. The model consists of three rigid bodies in planar motion (Fig.3), i.e.: car body,
and two unsprung masses, linked together by suspension arms (leading for FR and
trailing for RR) and spring-damper rally coilover modules (Fig.4). Main assumptions to
the rally car model are the following:
- motion of the car in XZ plane is considered only (half vehicle model);

60
- the car response can be excited by road profile (described by smooth sin-like
function) and driver actions (acceleration or braking described by selected time
functions);
- 7 degrees of freedom are taken into account (3 DOF for the car body, 2 DOF
for the front and rear wheel hop, 2 DOF for rotations of the front and rear
wheels);
- the road with bumps is rigid and symmetric across the road width;
- the car is symmetric (mass, stiffness and damping) with respect to its
longitudinal plane;
- powertrain dynamics are neglected;
- tire model with adaptive contact point and one-sided constraints is
implemented.
The rally car model (Fig.3) with 7DOF is described by the following generalized
coordinates:
q = [xc, zc, c, f,r, sf, sr]T
(1)
Equations of the car motion have the following general form:
),,,t(),,t( pqqfqpqM (2)
where: M – mass matrix; t – time; p – vector of the model parameters.
Set of ordinary equations (2) is solved using Runge-Kutta 45 algorithm, for given:
- initial conditions (vx, among the others),
- car setup (p),
- road bump profile (described by type, height and length),
- driver control actions (braking or acceleration before or after attacking the road
bump).
Fig. 3. Scheme of rally car model with 7DOF for analysis of passing over symmetric
road bumps

61
Fig. 4. FR rigid axle of ORCA with double coil-over-dampers and RR rigid axle [14]
The ORCA model data (p) were estimated on the basis of many laboratory tests in
Institute of Automobiles and Combustion Engines in Cracow University of Technology
[10]. Main parameters of ORCA in 2007 specifications are given in Tab.2. Damping
forces were measured taking advantage of electro-hydraulic test rigs in BWI Technical
Center Cracow [13]. Nonlinear characteristics of suspension dampers are described by
independent parameters, chosen as design variables (d) in the optimization problem,
tab.2. Changes in damping characteristics were realized by exchanging proper
components of damping valves [2]. Additionally, a specially designed and patented
solution of damper valve system, called Super Progressive, is used in the car for extreme
loading conditions, but is not considered in this paper.
Small moment of inertia of the car body (with the engine and gearbox centrally
mounted) and high ratio of unsprung (rigid axles) to sprung (steel tube frame) masses are
specific features of ORCA (tab.2), that contribute to the car dynamic response.
Table 2. Main parameters of ORCA rally car model (Ref. to Fig.2)
Bodystructure Steel tube frame with carbon fiber shells
Engine BMW 3.0 tdi (centrally mounted)
Powertrain 4WD permanent (Mercedes G)
Main dimensions l= 2.750 m; h0 = 0.3 m; l1= 1.3 m;
Wheel suspensions Rigid axles with leading/trailing arms and Panhard rods
(Mercedes G type). Dimensions: lwp = lwt = 0.950 m; αwp
= αwt= 9 deg ;τwp = τwt = 0
Susp. springs&dampers sport coilovers with shock absorber and two springs in
series (Fig. 3), full stroke: 0.25 m.
Masses and moments of
inertia(with crew&fuel)
mr=1100 kg (sprung mass); mnp=260 kg (FR unsprung
mass); mnt=200 kg (RR unsprung); Jy= 860 kgm2 (car
body); Jw= 2.1 kgm2 (wheel);
Tires (BF Goodrich 235/85 R16) R0=0.36 m; K0=240 N/mm;
Note: geometric data are given for a design position of the car body

62
4. Optimization algorithm for selected road type
The problem of the suspension dampers optimization for the performance increase of
ORCA rally car during passing over a selected road type (R) with a given initial speed
(vx) of the car, can be defined as [6]:
minimize objectives: w (3)
through design variables: d
under constraints dmin<d<dmax
The objective vector (w) is always defined here by two components describing the
most significant features regarding (i) the car performance and (ii) the driver (crew)
comfort.
Nonlinear characteristics of damping forces are described by independent parameters
(Tab.1) for FR an RR axles, which were chosen as design variables in the following
vector:
d = [d1d2 … dn]T, and pd
(4)
Size (n) of the design vector (4) depends on type of the damper valve system (Tab.1).
In case of 1-way valve system, there are 2 design variables, i.e. one for FR axle and one
for RR. In case of 4-way system, there are 8 design variables (4 for FR and 4 for RR).
Each component of the design vector (4) is considered with min-max constraints,
according to real limitations (e.g. ±50%) of its values. The rest of the model (2)
parameters are kept constant. The defined criteria and design variables (4) were
normalized for better conditioning of the optimization problem.
This multi-criteria optimization has been solved by using Genetic Algorithms with
nondominated sorting [7], which is effective in finding of global optima of discontinues
objective spaces. The following parameters of GA were found to be effective here:
selection by tournament, reproduction with crossover fraction 0.8, forward migration of
fraction 0.2, pareto front population fraction 0.35. Simulation of a single road scenario of
1.6 s duration time, takes about 1s on PC with 3GHz processor and 2GB RAM. About
6000 evaluations (ca. 2 hrs) of the objective function (3) are needed to terminate with
satisfying results.
5. Dampers optimized for road with hopa’s “Hopa” is a special type of spectacular obstacles, often contained in routes of rallies,
especially in the form of a natural or artificial road bump (crest). The rally cars jump at
high speed and fall back to the road being in the air for a fraction of second. Following
phases of ORCA rally car [14] passing over a hopa (bump height: hn= 0.14m, length:
ln= 2.5m) with speed vx = 25m/s, are presented in Fig. 5. The first snap shot illustrates a
front axle compression near the top of the road bump (t = 0.14s). Next, the rear axle is
compressed at the bump crest (t = 0.22s) and the front axle is fully unloaded (in air).
This is followed by the rear axle “kick”, which changes rapidly the car body orientation.
The car is landing (t = 0.50s) with the front axle first and a huge pitch angle (nose
diving). The virtual model of ORCA (Fig.5) emulates a dangerous nose diving of the car
(which should be avoided) quit well.

63
Fig. 5. Actual ORCA rally car and its simulation model during selected phases of
passing over hopa (vx = 25m/s, set0 - car initial setup)
The response of a rally car depends largely on the forces generated by the wheel
suspensions while attacking thy bump, car mass distribution, aerodynamic forces (at
high speeds) and driver actions. The maximum speed of overcoming this kind of
obstacle may be limited by the presence of at least one of the following side effects: (i)
unacceptable loads in the wheel suspensions (durability issues),(ii) unacceptable loads
(accelerations) acting on driver and co-driver (health issues), (iii) too large pitch angle of
the car body (car control and stability issues).
This problem of vehicle dynamics is similar to the known “flat ride” requirements for
single road bumps [15], but much more complex due to high nonlinearities concerning
the wheels lift off and extreme strokes of the wheel suspensions.
The ORCA Team complained on (i) vary unpleasant kicks on the seats and (ii) a
huge nose diving during passing over the described road bumps in an initial setup (set30)
of the ORCA car. These car features were considered as main limitations of maximum
speed for safe negotiation of the “hopa” type obstacles. The rally car response during
jump over “hopa” can be evaluated on the basis of the following criteria that should be
minimized:
- exceed of permissible compression deflection of FR suspension (risk of the
suspension damage);
- the same for RR suspension (risk of the suspension damage);
- exceed of permissible force (spring and damping) at FR suspension (risk of the
suspension damage);
- the same for RR suspension (risk of the suspension damage);
- peak of the car body pitch angle (requirement of the car body flat motion);
- peak of the vertical and horizontal acceleration of the car crew (risk of human
injury);
- decrease of the car longitudinal velocity;
- settling time of the car vibrations after the jump (fast recovery of trim state);
- length and height of the jump (safety and durability issues).
All these objectives can be evaluated on the basis of a given car state, described by
(1). However, some of the criteria are correlated, therefore should be reduced from

64
multidimensional objective function for better effectiveness. On the basis of preliminary
sensitivity analyses the following two criteria were chosen as primary objectives:
w1 -peak value of the car body pitch angle (c); (5)
w2 -peak value of the vertical acceleration (az) of the driver (and co-driver);
A single road scenario, describing the bump profile presented in Fig. 5, is taken into
account in the optimization (3). Time responses for this maneuver of ORCA model with
the initial chassis setup (set0), are presented in Fig.6.
Huge two peaks of the driver vertical acceleration (az), reaching 4g and 3.5g, are
noticeable in the response. This acceleration level is hardly acceptable by the crew and
can cause spine compressive injury, among the others. The acceleration is generated
mainly by compression strokes of the rear axle, which is closer to the driver and co-
driver seats. Additionally, response of the car body pitch angle (φc) is disadvantageous,
because its high peak value (about 12 deg) corresponds to the front axle landing point (t
= 0.5s), it means a nose diving with its side effects (Fig.5).
Fig. 6 Time responses of ORCA model with initial set0 and optimal chassis setups,
during passing over hopa: (φc) pitch angle of car body; (az) vertical acceleration of rally
crew
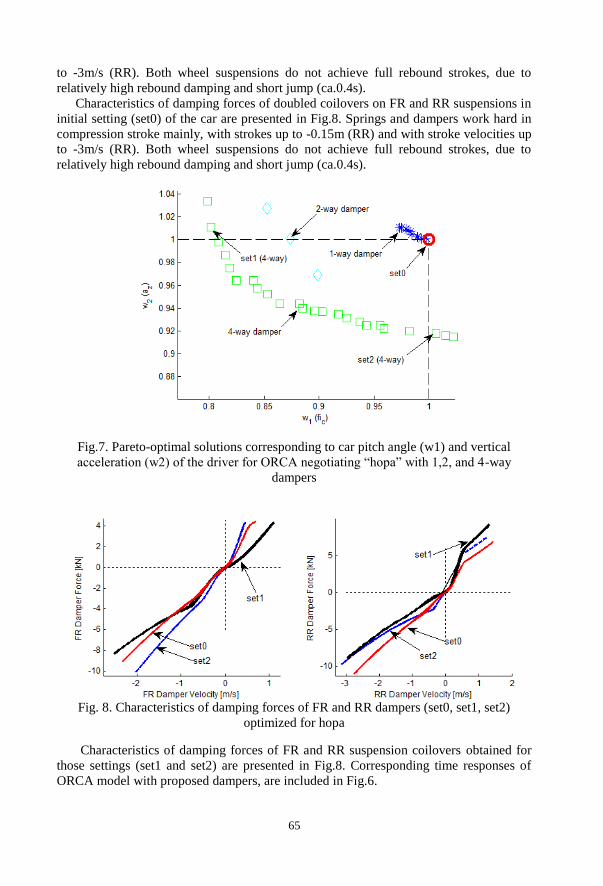
Characteristics of damping forces of doubled coilovers on FR and RR suspensions in
initial setting (set0) of the car are presented in Fig.8. Springs and dampers work hard in
compression stroke mainly, with strokes up to -0.15m (RR) and with stroke velocities up
65
to -3m/s (RR). Both wheel suspensions do not achieve full rebound strokes, due to
relatively high rebound damping and short jump (ca.0.4s).
Characteristics of damping forces of doubled coilovers on FR and RR suspensions in
initial setting (set0) of the car are presented in Fig.8. Springs and dampers work hard in
compression stroke mainly, with strokes up to -0.15m (RR) and with stroke velocities up
to -3m/s (RR). Both wheel suspensions do not achieve full rebound strokes, due to
relatively high rebound damping and short jump (ca.0.4s).
Fig.7. Pareto-optimal solutions corresponding to car pitch angle (w1) and vertical
acceleration (w2) of the driver for ORCA negotiating “hopa” with 1,2, and 4-way
dampers
Fig. 8. Characteristics of damping forces of FR and RR dampers (set0, set1, set2)
optimized for hopa
Characteristics of damping forces of FR and RR suspension coilovers obtained for
those settings (set1 and set2) are presented in Fig.8. Corresponding time responses of
ORCA model with proposed dampers, are included in Fig.6.

66
6. Dampers optimized for bumpy road The second optimization scenario considers a rally route with dominating wave like
bumps on the road. Following phases of ORCA model (with initial setup: set0) passing
over a road with sine–profile unevenness (wave height: hn= 0.05m, length: ln= 2.0m)
with speed vx = 15m/s, are presented in Fig. 9. The snap shot on the right side illustrates
a dynamic state of ORCA at t = 0.40s when the FR axle is strongly compressed and RR
axle is fully unloaded.
Fig.9. Time responses of ORCA model with initial (set0) setup during passing over
wavy road with speed vx = 15m/s: (Fz) wheel normal forces; (az) vertical acceleration of
rally crew
The rally car response on the considered bumpy road is evaluated on the basis of the
following criteria that should be minimized:
w1 - standard deviation of the vertical acceleration (az) of the driver; (6)
w2 - maximum of standard deviations of FR& RR wheel normal loads (Fz).
The first criterion (w1) is correlated with the driver ride comfort and the second (w2)
– with the car performance (wheel normal load fluctuation).
The obtained Pareto-optimal fronts, presented in Fig. 10, illustrate a trade-off
between the objective criteria (6). Each solution with value lower than one means an
improvement. Range of improvements depends on type (1 and 4-way) of valve system
applied in dampers (Tab.1). Again, dampers with 1-way valves offer only poor
improvements.
Different solutions can be chosen according to the driver preferences. For example,
two following solutions regarding 4-way (Fig. 10) dampers are further considered:
set1 (4-way) - solution oriented on decreasing by 8.5% the vertical
acceleration of the driver (w1 = 0.91), but no worse than initial
setup (set0) with respect to fluctuation of wheel normal loads
(w2 = 0.99);
set2 (4-way) - solution oriented on decreasing by 5% (w2 = 0.95) of
fluctuation of wheel normal loads, but no worse than initial
setup (set0) with respect to the vertical acceleration of the
driver (w1 = 0.98).

67
Fig.10. Pareto-optimal solutions corresponding to vertical acceleration (w1) of the driver
and normal loads (w2) of ORCA wheels negotiating wavy road with 1 and 4-way
dampers
Characteristics of damping forces of FR and RR suspension coilovers obtained for
those settings (set1 and set2) are compared in Fig.11 with the initial setup (set0).
Fig.11. Characteristics of damping forces of FR and RR dampers (set0, set1, set2)
optimized for wavy road

68
7. Conclusions and future works
The formulated car model with optimization algorithm enables to reduce expensive
road tests for finding the best setup of the rally car with respect to a given road type.
Nonlinear characteristics of damping forces in passive coil-over-shocks at front and rear
axles are chosen as design variables for the optimization.
Optimization of ORCA car dampers for a rally route with many hopa like road
bumps, enables reduction of the car body pitch angle by 18% (set1, 4-way dampers) or
the rally crew vertical acceleration by 8% (set2, 4-way dampers), depending on the
driver preferences. Less pitch angle means more flat motion of the car body and nearly
equal contact of all wheels with the ground after the jump. This kind of the car response
gives more proportional load distribution in the car structure, stable landing, and
sufficient visibility of the motion path for the driver. Less vertical acceleration enhances
the crew ride comfort. This is especially important in off-road rally, where a “human
strength” can be a limiting factor in the system performance.
In case of a rally route with dominating wave like road bumps, optimization of
ORCA car dampers leads to a decrease of the driver vertical acceleration by 8.5% (set1,
4-way dampers) or reduction of wheel normal load fluctuations by 5% (set2, 4-way
dampers) with respect to the initial setup.
The car with the optimal setups can be driven safely with further increased speed for
attacking the considered obstacles, what was confirmed by the rally team. Much better
results can be obtained by extending the design variables to other chassis parameters [6]
(e.g. suspension stiffness, tire pressures, mass distribution) and including additional road
scenarios (different bumps, speeds and driver actions), giving a more complete approach
to car tuning.
References:
[1] Dixon J.: The Shock Absorber Handbook. Willey, 2000,
[2] Dzierżek S., Knapczyk M., Maniowski M.: Diversity of passive dampers
performance characteristics in response to specific ride and handling
requirements. Vehicle Dynamics Expo, North America Novi, Michigan, 2008,
[3] Kępa M.: Badania wpływu zmian charakterystyk tłumienia i resorowania
zawieszeń samochodu sportowego na jego osiągi. Praca inż. (promotor:
M.Maniowski), Wydz.Mechaniczny PK, 2011,
[4] Kozdroń Ł.: Wpływ regulacji amortyzatorów na drgania samochodu rajdowego.
Praca magisterska (promotor: M.Maniowski), Wydział Mechaniczny PK, 2013,
[5] Maniowski M.: Optymalizacja samochodu wyścigowego ze względu na
skuteczność hamowania na nierównej drodze. Międzynarodowa Konf.
Hamulcowa i Bezpieczeństwa, Uniejów, 2013,
[6] Maniowski M.: Optimization of spring-damper modules of rally car for fast
passing over jump inducing bumps, International Association of Vehicle System
Dynamics, Manchester 2011,
[7] Maniowski M.: Optymalizacja parametrów zawieszeń samochodu
przednionapędowego dla szybszego pokonania łuku drogi. Czasopismo
Techniczne PK, z.10, str. 35-50, 5-M/2012,
[8] Maniowski M.: Porównanie efektywności modeli amortyzatorów hydraulicznych,
VIII Międzynarodowa Konf. Naukowo-Techn., Problemy Bezpieczeństwa
Pojazdów, Kielce-Cedzyna 2012,

69
[9] Maniowski M.: Optymalizacja charakterystyk tłumienia amortyzatora
samochodowego w warunkach przejazdu po pojedynczej nierówności drogi.
Czasopismo Techniczne Politechniki Krakowskiej, 1-M, zeszyt 2, str.137-145,
2011,
[10] Maniowski M.: Ustawienia samochodu rajdowego dla szybkiego pokonania hopy.
Zeszyty Naukowe Politechniki Świętokrzyskiej, nr 8, Kielce, Poland, 2008,
[11] Podsiadło M.: Dobór sił tłumienia regulowanych amortyzatorów do samochodu
sportowego o przednim napędzie. Praca inż. (promotor: M. Maniowski), Wydz.
Mechaniczny PK, 2013.
[12] Woszczyński D.: Wpływ charakterystyk amortyzatorów na komfort jazdy i
właściwości jezdne samochodu. Praca magisterska (promotor: M. Maniowski),
Wydział Mechaniczny PK, 2014.
[13] www.bwigroup.com (damper producer),
[14] www.orca.com.pl (rally team ORCA),
[15] Zuijdijk J.: Vehicle dynamics and damping. AuthorHouse, 2009.
Abstract
Paper regards a performance increase of an actual off-road (4x4) rally car (FIA–T1)
through multiobjective optimization of damping characteristics of wheel suspensions in
the car model with 7 degrees of freedom. Focus is put to find the dampers setup enabling
for fast and comfortable passing over road unevennesses of a bump (“hopa”) and a wave
type. The optimization problem is defined with up to 8 design variables, describing
damping characteristics, and two contradictory objectives regarding car performance and
driver comfort. Tuning possibilities of damper valve systems enabling changes of 1 to 4
settings are compared. The formulated optimization algorithm aids finding the best setup
of rally car for a given road type and it reduces expensive road tests and trial&error
methods
Keywords: optimization, rally car, dampers
OPTYMALIZACJA AMORTYZATORÓW
DO RAJDOWEGO SAMOCHODU TERENOWEGO
Streszczenie
Artykuł obejmuje zwiększanie osiągów rzeczywistego samochodu terenowego
(4x4), wykorzystywanego w rajdach, poprzez wielokryterialną optymalizację
charakterystyk tłumienia zawieszeń kół w modelu dynamiki o 7 stopniach swobody.
Wykazano możliwość zwiększenia prędkości i komfortu kierowcy podczas pokonywania
nierówności drogi typu garb (hopa) oraz fala. Problem optymalizacji jest opisany przez 8
zmiennych decyzyjnych opisujących nieliniowe charakterystyk amortyzatorów na obu
osiach samochodu. Jako funkcje celu sformułowano sprzeczne wymagania dotyczące
osiągów samochodu i komfortu podróży załogi rajdowej. Porównano wyniki
optymalizacji przyjmując różne rozwiązania regulacji sił tłumienia w amortyzatorach.
Słowa kluczowe: optymalizacja, samochód rajdowy, amortyzatory