(powerpoint presentation)line following automated guided vehicle using hovercraft mechanism
TRANSCRIPT

AMITY UNIVERSITY, LUCKNOW CAMPUS
UTTAR PRADESH
A
Line Following Automated Guided Vehicle
using
Hovercraft Mechanism
ABHYUDAY RAJ SINHA
B.Tech(MAE)
5th- Semester
A7605413070
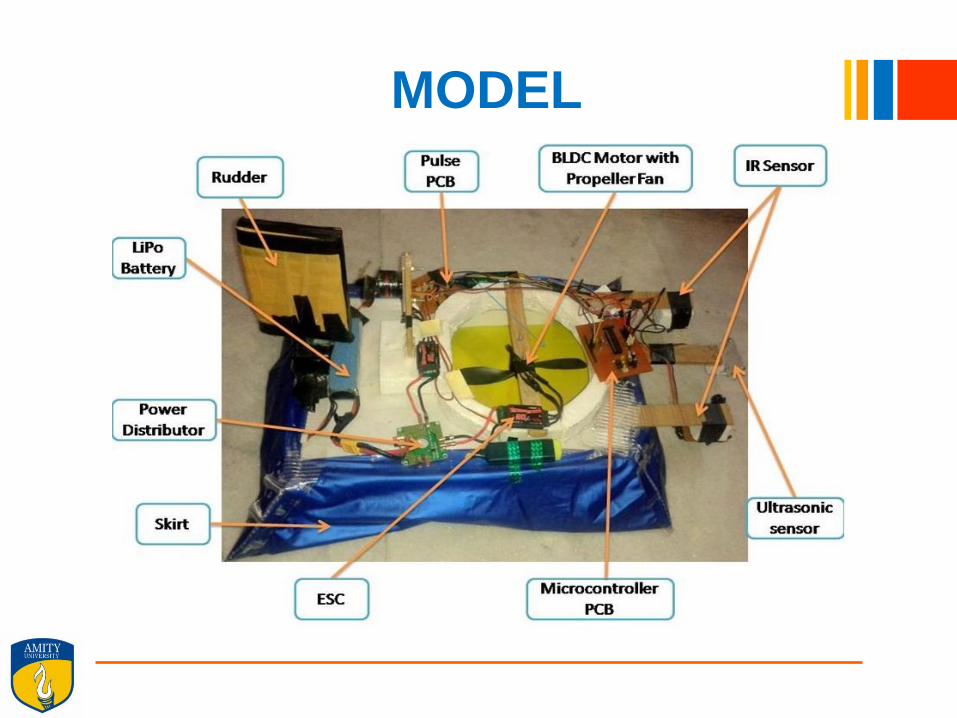
MODEL

HOVERCRAFT
WHAT IS A HOVERCRAFT? A vehicle that can ride on air and travel over various surfaces
Requires air pressure to build up underneath to lift it off the ground
Used in the military, local and world wide competitions, and some are used for daily transportation
HOW DOES IT WORK? Fan/Air Source inflates skirt enough so that the air pressure inside
can lift the hovercraft off the ground
Bag skirt contains holes to allow air to escape and push out from underneath to help with the lift and ensure that the skirt won’t burst
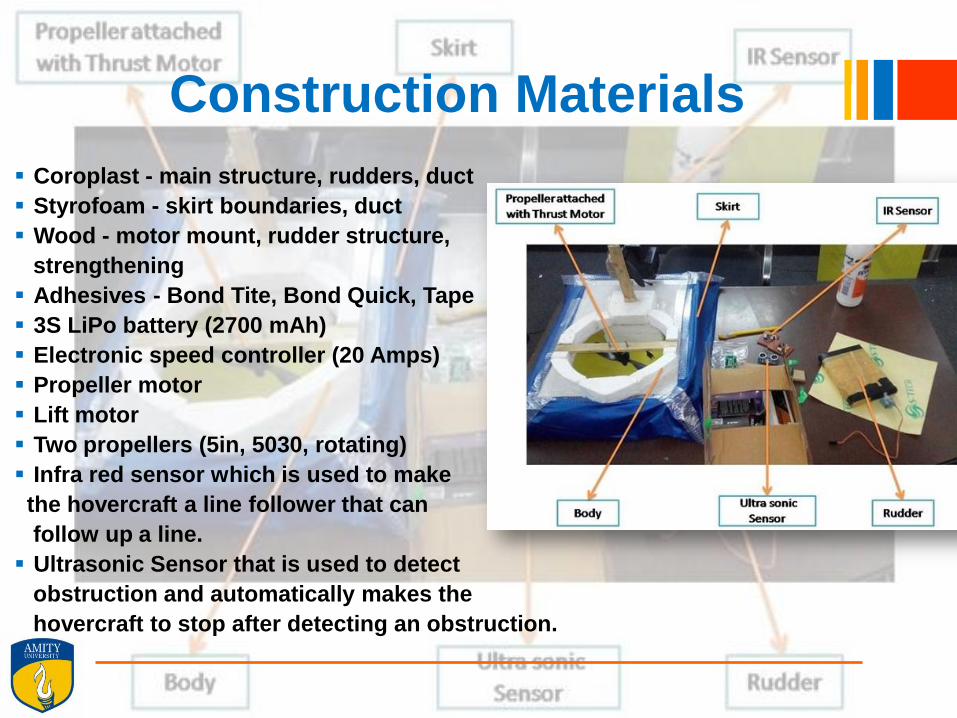
Construction Materials
Coroplast - main structure, rudders, duct
Styrofoam - skirt boundaries, duct
Wood - motor mount, rudder structure,
strengthening
Adhesives - Bond Tite, Bond Quick, Tape
3S LiPo battery (2700 mAh)
Electronic speed controller (20 Amps)
Propeller motor
Lift motor
Two propellers (5in, 5030, rotating)
Infra red sensor which is used to make
the hovercraft a line follower that can
follow up a line.
Ultrasonic Sensor that is used to detect
obstruction and automatically makes the
hovercraft to stop after detecting an obstruction.
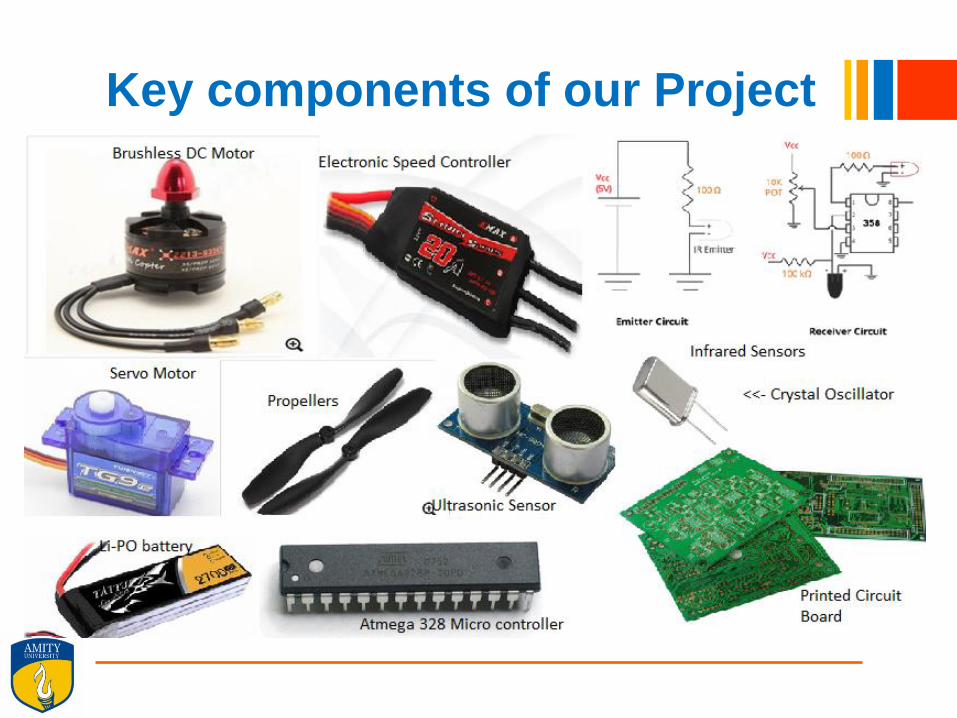
Key components of our Project

Principle of Working
To lift the craft by a cushion of air we use propellers.
The air is sucked in through a duct by large lifting fans which are fitted
to the primary structure of the hovercraft.
They are powered by a 2700mAH Li-PO battery.
Fan is used to inflate the skirt and rest is ducted down under the craft to
fill area enclosed by the skirt.
At the point when the pressure equals the weight of the craft, the craft
lifts up and air is escaped around the edges of the skirt.
So a constant feed of air is needed to lift the craft and compensate for
the losses.

Technical definitions of the important
keywords used in our project Skirt
Skirt is the device that grants air cushion to be maintained. Skirt is fixed in the craft
perimeter, holds and keep enough air mass and pressure beneath the hull granting it
to be away from surface, it must be flexible and contour surface irregularities and
waves and be water and air proof.
Lift
Lift is the air cushion beneath the hull surrounded by the skirt.
Thrust
Thrust is the force that will fight and win Drag, inducing movement to the hovercraft.
Drag
Drag is the force that hinders forward motion.
Rudder
It is the component that provides directional motion to the hovercraft.


PROGRAMMING
Program is written in C language.
Code is written to give instructions to computer to perform a
particular task in a particular condition.
Code is compiled to generate machine file.
Computer only understand this machine file which is in the
language of 0 & 1.
Now this file is been feed in the memory of the microcontroller.

Advantages
Our AGV does not touch the ground and remains lifted in air during its
entire motion. Thus it proves to be more economical, efficient, power-
saving, and frictionless device.
As the name suggests, it is an Autonomous vehicle, thus all the Material
handling costs, Human and labour costs are thus eliminated completely.
Any chance of collision is completely eliminated as we have used
Ultrasonic sensor which can detect the obstacles and will STOP there
and then thus preventing any chances of collision.
Path Following mechanism is very easy with the help of two Infrared
sensors.
Rudder provides an easy mechanism to give turning effects to the AGV.
Easy mechanism of Speed-adjusting of motors as programming can be
easily varied thus can work on all kinds of load or in other words it is
more flexible.

Future Scope Since our Hovercraft is completely an Autonomous vehicle, hence it
can effectively replace the Material Handling Vehicles in industries in
a very effective manner. It can prove to be more efficient than these
Material Handling Vehicles since our Automatic Guided Vehicle is a
SMART DECISION MAKING VEHICLE which will not only follow its
path very effectively but also STOP and START according to the
obstacle if it comes in its path in a very efficiently and
Spontaneously.
It is fully capable to lift and carry loads of significant weight and can
move in an effective path without any deviation from its path.
Moreover it is more reliable than those of Material Handling Vehicles
as it can be repaired easily if any problem comes, motion and control
can be easily varied by simple programming change.

It is more efficient than others. Since there is no contact with the ground during its motion, it is frictionless and hence energy loses are minimum and thus proving to be more efficient. So heat loses and energy loses are completely eliminated in this case.
The body design is completely economical. It does not employ heavy materials and bulky parts and hence it is easy and simple to design. Hence it helps in minimising the errors during manufacturing and can effectively be used on Large Scale Industries.
Now it is a one step ahead of all Mechanical devices. The magnificent fact is that our vehicle can run both in Autonomous way and by Hand Control by providing a circuit which can turn on or off the programming mechanism from rest of the control system.

Conclusion
We would like to conclude that there is a lot of scope for
improvements in every field especially in the field of
Mechanical and Automation where a lot of innovation is still
to come in field for making more economically, more power-
efficient device, more capable and efficient devices have
minimum losses and providing greater efficiency. We hope
that our Project “Line Following Automated Guided Vehicle
using Hovercraft Mechanism” has all the required sufficient
strengths and capabilities to replace or act as an alternative
for many Material Handling Vehicles and Mechanical
Devices. It is cheaper and reliable, thus it also reduces the
cost of purchasing that expensive load lifting vehicle.
Hence our overall objective is accomplished with the help
of Brushless DC motor, electronic circuits, micro controller,
sensors, servo motor and speed controller.
