pontificia universidad catÓlica de …lep.eie.pucv.cl/tesisjonhy.pdf · figura 2-13: gráfica de...
TRANSCRIPT
PONTIFICIA UNIVERSIDAD CATÓLICA DE VALPARAÍSO – CHILEESCUELA DE INGENIERÍA ELÉCTRICA
ESTUDIO DE FACTIBILIDAD TÉCNICA DEL APROVECHAMIENTO DEENERGÍAS EN UN SISTEMA DE ESCALERAS MECÁNICAS
CASO MALL
JONHY GABRIEL VIDAL GONZÁLEZ
INFORME FINAL DEL PROYECTO
PRESENTADO EN CUMPLIMIENTO
DE LOS REQUISITOS PARA OPTAR
AL TÍTULO PROFESIONAL DE
INGENIERO ELÉCTRICO
Mayo 2009

ESTUDIO DE FACTIBILIDAD TÉCNICA DEL APROVECHAMIENTO DEENERGÍAS EN UN SISTEMA DE ESCALERAS MECÁNICAS
CASO MALL
INFORME FINAL
Presentado en cumplimiento de los requisitos
para optar al título profesional de
Ingeniero Eléctrico
otorgado por la
Escuela de Ingeniería Eléctrica
de la
Pontificia Universidad Católica de Valparaíso
Jonhy Gabriel Vidal González
Profesor Guía Sr. Domingo Ruiz CaballeroProfesor Correferente Sr. Paulino Alonso Rivas
Mayo 2009

ii
ACTA DE APROBACIÓN
La Comisión Calificadora designada por la Escuela de Ingeniería Eléctrica haaprobado el texto del Informe Final del Proyecto de Titulación, desarrollado entreel segundo semestre de 2007 y el primer semestre de 2008, y denominado
ESTUDIO DE FACTIBILIDAD TÉCNICA DEL APROVECHAMIENTO DEENERGÍAS EN UN SISTEMA DE ESCALERAS MECÁNICAS
CASO MALL
Presentado por el Señor
Jonhy Gabriel Vidal González
Domingo Ruiz Caballero
Profesor Guía
Paulino Alonso Rivas
Segundo Revisor
Raimundo Villarroel Valencia
Secretario Académico
Valparaíso, Mayo 2009
iii
ESTUDIO DE FACTIBILIDAD TÉCNICA DEL APROVECHAMIENTO DEENERGÍAS EN UN SISTEMA DE ESCALERAS MECÁNICAS - CASO MALL
Jonhy Gabriel Vidal González
Profesor Guía Sr. Domingo Ruiz Caballero
RESUMEN
El principal objetivo de este trabajo es estudiar la posibilidad de
aprovechar las energías reactivas generadas por los procesos de frenado de las
escaleras mecánicas en los mall.
En primer lugar se entrega una introducción de los sistemas regenerativos
existentes en la actualidad, mostrando sus distintos elementos constituyentes y
describiendo sus principales ventajas y desventajas. Además se dan a conocer
ejemplos de sistemas reales en los cuales se están usando estos sistemas
regenerativos. Luego se da paso a la descripción de los componentes y
funcionamiento de las escaleras mecánicas, señalando en detalle sus
características y la funcionalidad de estos elementos dentro de estas escaleras
convencionales.
Seguidamente se procede a aplicar estas técnicas de regeneración en las
escaleras mecánicas, simulando su funcionamiento en el programa simulink. La
alimentación del par de escaleras, una descendente y otra ascendente, se
realiza por medio de un rectificador trifásico de onda completa, el que alimenta
un DC link al que están conectados los inversores provistos del denominado
“control vectorial”, que alimentarán al motor impulsor correspondiente a cada
escalera. Además se realiza un análisis armónico a este sistema, y finalmente
una evaluación económica de este proyecto, para así analizar su viabilidad
económica y técnica.

iv
ÍNDICE
Pág.
INTRODUCCIÓN 1
CAPÍTULO 1SISTEMAS REGENERATIVOS Y LAS ESCALERAS MECÁNICAS. 21.1 ACCIONAMIENTOS 21.2 BARRA CORRIENTE CONTINUA COMÚN (DC LINK) 41.2.1 Unidad de Alimentación 51.2.2 La Unidad Nfe (Non-regenerative front-end) 51.2.3 La Unidad Ffe (Fundamental Front-End) 51.2.4 La Unidad Afe (Active Front-End) 51.2.5 Inversor 61.2.6 Unidad de Freno 61.3 REGENERACIÓN IGBT: OBJETIVOS DE REGULACIÓN 61.4 CONFIGURACIÓN ANTIPARALELO DE PUENTES A TIRISTORES 71.5 REGENERACIÓN 91.5.1 Sistema de Grúas 101.5.2 Resistencia de Frenado 121.5.3 Nueva Tecnología 121.5.4 Correas Transportadoras Descendentes 141.5.5 Ejemplo de Aplicación 141.6 DESCRIPCIÓN DE LAS ESCALERAS MECÁNICAS. 151.7 FUNCIONAMIENTO DE LA ESCALERA MECÁNICA. 181.7.1 Unidad impulsora 181.7.2 Mecanismo de Los Peldaños. 261.7.3 Mecanismo De Tracción De Las Barandas 29
CAPÍTULO 2SISTEMA REGENERATIVO IMPLEMENTADO ENESCALERAS MECÁNICAS 322.1 SIMULACIÓN EN SIMULINK 322.2 INTRODUCCIÓN IMPLEMENTACIÓN DEL CONTROL VECTORIAL 382.3 DESCRIPCIÓN DEL CONTROL VECTORIAL 392.4 SIMULACIONES CON CONTROL VECTORIAL. 432.5 RESULTADOS DE LA SIMULACIÓN 46
CAPITULO 3ESTUDIO ARMÓNICO DEL SISTEMA CON CONTROL VECTORIALIMPLEMENTADO PARA LAS ESCALERAS MECÁNICAS 533.1 DESCRIPCIÓN DEL SISTEMA. 533.2 RESULTADOS DEL ESTUDIO ARMÓNICO PARA 2 MOTORES 553.2.1 Simulación Carga Baja 2 Motores 55

v
3.2.2 Simulación Carga Media 2 Motores 573.2.3 Simulación Carga Nominal 2 Motores 583.3 RESULTADOS DEL ESTUDIO ARMÓNICO PARA 8 MOTORES. 603.3.1 Simulación Carga Baja 8 Motores 603.3.2 Simulación Carga Media 8 Motores 613.3.3 Simulación Carga Nominal 8 Motores 63
CAPÍTULO 4FACTIBILIDAD TÉCNICA Y ECONÓMICA DEL SISTEMA CON CONTROLVECTORIAL EN LAS ESCALERAS MECÁNICAS. 654.1 DESCRIPCIÓN DE LOS EQUIPOS A UTILIZAR 654.2 TARIFAS ELÉCTRICAS. 704.3 SIMULACIÓN 8 MOTORES 724.4 SIMULACIÓN 2 MOTORES 754.5 FUNDAMENTOS ECONÓMICOS. 774.5.1 Valor Actualizado Neto (V.A.N.). 784.5.2 Tasa Interna de Rentabilidad (T.I.R) 794.5.3 Tiempo de Recuperación de La Inversión 804.5.4 Relación Beneficio/Costo (B/C) 804.6 EVALUACIÓN ECONÓMICA DEL PROYECTO 814.6.1 Cálculo Del T.I.R 814.6.2 Cálculo del VAN 844.6.3 Relación Beneficio/Costo 86
CONCLUSIONES 90
BIBLIOGRAFÍA
APÉNDICE AIMPLEMENTACIÓN DEL CONTROL VECTORIALEN SIMULINK
A P É N D I C E BGRÁFICAS DE POTENCIAS
vi
ÍNDICE DE FIGURAS
Pág.FIGURAS
Figura 1-1: Categorías de aplicaciones de accionamientos 3Figura 1-2: Alternativas de conexión DC link 4Figura 1-3: Puente rectificador con IGBT 8Figura 1-4: Puente rectificador con tiristores en antiparalelo. 8Figura 1-5: Regeneración. 10Figura 1-6: Diagrama eléctrico simplificado de grúa. 11Figura 1-7: Chooper y resistencia de frenado 11Figura 1-8: Nueva tecnología de regeneración en grúas. 13Figura 1-9: Ahorro de energía en grúas 13Figura 1-10: Motores en paralelo 14Figura 1-11: Mecanismo de tracción de las escaleras mecánicas 16Figura 1-12: Vista general del mecanismo 17Figura 1-13: Guía de los escalones 17Figura 1-14: Cadena de peldaños 18Figura 1-15: Rueda dentada para la cadena de peldaños 18Figura 1-16: Ubicación de la unidad impulsora. 19Figura 1-17: La ubicación del motor en la unidad impulsora. 19Figura 1-18: Curvas características de motor estándar. 21Figura 1-19: Motor y engranaje. 22Figura 1-20: Caja de engranaje tipo tornillo sin fin. 23Figura 1-21: Ubicación de piñón de salida en la caja de engranaje. 23Figura 1-22: Componentes de una cadena de rodillos. 24Figura 1-23: Tracción de la caja de engranaje a árbol mecánico de peldaños. 24Figura 1-24: Identificación de ruedas dentadas de árbol mecánico. 25Figura 1-25: Ubicación del freno de servicio. 26Figura 1-26: Peldaño. 27Figura 1-27: Peldaño con rodillos. 27Figura 1-28: Cadena de peldaños. 28Figura 1-29: Unión de los escalones a la cadena de peldaños. 28Figura 1-30: Rueda dentada inferior. 29Figura 1-31: Guía de peldaños. 29Figura 1-32: Mecanismo de impulsión del árbol mecánico para las barandas. 30Figura 1-33: Pasamanos y balaustrada. 30Figura 1-34: Sistema de rodillos para los pasamanos. 31Figura 2-1: Circuito implementado en simulink. 32Figura 2-2: Torque en el motor 1. 33Figura 2-3: Torque en el motor 2. 34Figura 2-4: Velocidad motor 1. 35Figura 2-5: Velocidad motor 2 35

vii
Figura 2-6: Barra CC, tensión entre líneas en el motor. 36Figura 2-7: Zoom barra CC, tensión entre líneas en el motor. 36Figura 2-8: Corriente motor 1. 37Figura 2-9: Corriente motor 2. 37Figura 2-10: Torques y corriente del circuito. 38Figura 2-11: Cambio de coordenadas de la transformada de Clarke. 41Figura 2-12: Gráficas de la transformada de Clarke. 42Figura 2-13: Gráfica de la transformada de Park 42Figura 2-14: Circuito implementado en simulink 44Figura 2-15: Bloques del control vectorial 45Figura 2-16: Bloque del control de velocidad. 45Figura 2-17: Gráfica de factor de potencia y potencias de entrada con regeneración. 47Figura 2-18: Corriente, velocidad y torque en la escalera ascendente. 48Figura 2-19: Flujo de energía con regeneración. 49Figura 2-20: Corriente, velocidad y torque en la escalera descendente. 49Figura 2-21:Gráfica de factor de potencia y potencias de entrada sin regeneración. 50Figura 2-22: Corriente, velocidad y torque en la escalera ascendente. 51Figura 2-23: Corriente, velocidad y torque en la escalera descendente. 51Figura 2-24: Flujo de energía sin regeneración. 52Figura 3-1: Análisis armónico para el circuito de escaleras. 54Figura 3-2: Distorsión armónica corriente 2 motores carga baja. 56Figura 3-3: Distorsión armónica tensión 2 motores carga baja. 56Figura 3-4: Distorsión armónica corriente 2 motores carga media. 57Figura 3-5: Distorsión armónica tensión 2 motores carga media. 58Figura 3-6: Distorsión armónica corriente 2 motores carga nominal. 59Figura 3-7: Distorsión armónica tensión 2 motores carga nominal. 59Figura 3-8: Distorsión armónica corriente 8 motores carga baja. 60Figura 3-9: Distorsión armónica tensión 8 motores carga baja. 61Figura 3-10: Distorsión armónica corriente 8 motores carga media. 62Figura 3-11: Distorsión armónica tensión 8 motores carga media. 62Figura 3-12: Distorsión armónica corriente 8 motores carga nominal. 63Figura 3-13: Distorsión armónica tensión. 64Figura 4-1: Motor de inducción. 66Figura 4-2: Variador de frecuencia. 66Figura 4-3: Diagrama de conexión de tarjeta para encoder. 67Figura 4-4: Tarjeta para encoder. 68Figura 4-5: Encoder. 68Figura 4-6: Caja de engranaje 69Figura 4-7: Diagrama de conexión de los reactores de línea. 70Figura 4-8: Variación de la TRMA para viabilidad con 8 motores. 86Figura A-1: circuito a implementar en el simulink. A-1Figura A-2: Componentes en simulink A-2Figura A-3: Red trifásica. A-3
viii
Figura A-4: Parámetros de la red trifásica. A-3Figura A-5: sistema de 2 motores A-4Figura A-6: Sistema para 1 motor. A-5Figura A-7: Parámetros del puente rectificador A-6Figura A-8: Parámetros para el inversor trifásico A-6Figura A-9: Parámetros para el motor de inducción. A-7Figura A-10: Control por campo orientado A-8Figura A-11: Parámetros para el F.O.C. A-9Figura A-12: Control de velocidad A-10Figura A-13: Bloque de parámetros para el control de velocidad. A-11Figura B-1: 8 motores sin regeneración carga baja. B-1Figura B-2: 8 motores sin regeneración carga media. B-2Figura B-3: 8 motores sin regeneración carga alta. B-2Figura B-4: 8 motores con regeneración carga baja. B-3Figura B-5: 8 motores con regeneración carga media. B-3Figura B-6: 8 motores con regeneración carga alta. B-4Figura B-7: 2 motores sin regeneración carga baja B-4Figura B-8: 2 motores sin regeneración carga media B-5Figura B-9: 2 motores sin regeneración carga alta. B-5Figura B-10: 2 motores con regeneración carga baja. B-6Figura B-11: 2 motores con regeneración carga media. B-6Figura B-12: 2 motores con regeneración carga alta. B-7

ix
ÍNDICE DE TABLAS
TABLAS
Tabla 1.1: Tipos de procesos y aplicaciones. 3Tabla 1.2: Rango de potencia de motores para escaleras mecánicas. 20Tabla 1.3: Protección según norma IP para el motor. 20Tabla 1.4: Grado de protección IP para gabinete de control. 21Tabla 3.1: Norma para distorsión armónica de corrientes. 54Tabla 3.2: Norma para distorsión armónica de tensión. 55Tabla 4.1: Características del motor de inducción. 65Tabla 4.2: Características del encoder 68Tabla 4.3: Características de caja de engranaje. 69Tabla 4.4: Tarifa CONAFE 71Tabla 4.5: Tarifa CHILQUINTA 72Tabla 4.6: Demanda y consumo de 8 motores sin regeneración. 73Tabla 4.7: Demanda y consumo de 8 motores con regeneración. 73Tabla 4.8: Ahorro de dinero mensual 8 motores, CONAFE 74Tabla 4.9: Ahorro anual por motor para el caso 8 motores, CONAFE. 74Tabla 4.10: Ahorro de dinero mensual con CHILQUINTA. 75Tabla 4.11: Ahorro anual por motor para el caso 8 motores, CHILQUINTA. 75Tabla 4.12: Demanda y consumo de 2 motores sin regeneración. 76Tabla 4.13: Demanda y consumo de 2 motores con regeneración. 76Tabla 4.14: Ahorro de dinero mensual 2 motores, CONAFE. 76Tabla 4.15: Ahorro anual por motor para el caso 2 motores, CONAFE. 76Tabla 4.16: Ahorro de dinero mensual 2 motores, CHILQUINTA. 77Tabla 4.17: Ahorro anual por motor para el caso 2 motores, CHILQUINTA. 77Tabla 4.18: Costo de los dispositivos. 81Tabla 4.19: Ahorro anual en pesos y UF para 8 escaleras, CHILQUINTA. 87Tabla 4.20: Ahorro anual en pesos y UF para 8 escaleras, CONAFE. 87Tabla 4.21: Ahorro de dinero a 10 años para 8 escaleras. 87Tabla 4.22: Ahorro anual en pesos y UF para 2 escaleras, CHILQUINTA. 88Tabla 4.23: Ahorro anual en pesos y UF para 2 escaleras, CONAFE. 88Tabla 4.24: Ahorro de dinero a 10 años para 2 escaleras. 89Tabla A.1: Especificaciones para el F.O.C. A-9Tabla A.2: especificaciones del control de velocidad. A-10
INTRODUCCIÓN
En Chile, a diferencia de la tendencia mundial, el crecimiento de la
economía implica mayor consumo de energía. En años anteriores el consumo de
energía en chile creció un 7% anual, casi duplicando las tasas de crecimiento
económico. Esta situación genera despilfarro de recursos naturales, mayor
dependencia y gasto en los hogares, menor competitividad en el sector
productivo y mayor contaminación. Chile necesita aprender a usar la energía en
forma eficiente e inteligente, en todos los sectores: residencial, comercial,
transporte, industria, etc. los países desarrollados llevan 30 años de eficiencia y
han logrado crecimiento económico con menos energía. Varios países
latinoamericanos también tienen planes de eficiencia energética con excelentes
resultados.
En la industria y el comercio ayudados por el avance en las tecnologías, la
preocupación por el medio ambiente y creatividad se han logrado muchos
métodos para aprovechar los recursos energéticos, disminuyendo los costos de
los procesos y por ende aumentando su productividad.
El aprovechamiento de los frenados y la energía potencial de las cargas
permite la regeneración de energía en los sistemas eléctricos, en los que se
aplican nuevas técnicas y tecnologías. El estudio del ahorro de energía en
escaleras mecánicas no ha tenido un avance significativo, dejando de lado estos
grandes avances en la regeneración.

2
CAPÍTULO 1
SISTEMAS REGENERATIVOS Y LAS ESCALERAS MECÁNICAS.
1.1 ACCIONAMIENTOS
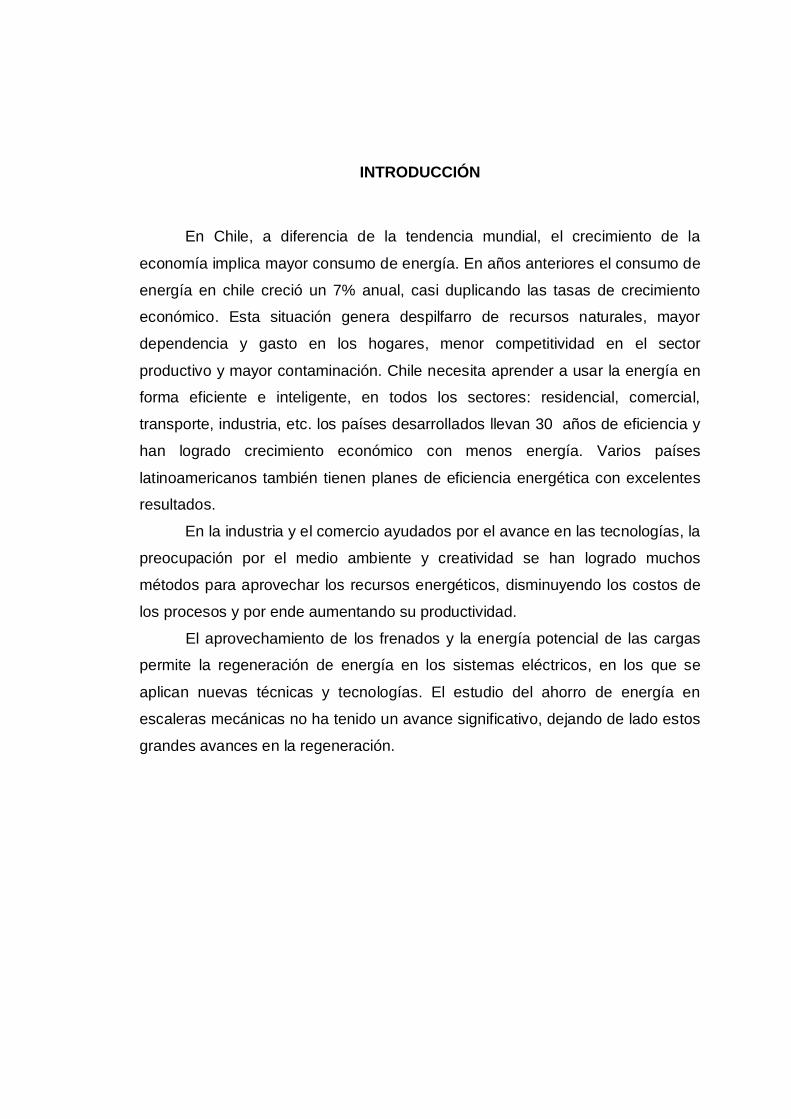
Las aplicaciones de accionamientos se pueden dividir en tres categorías
principales en función de la velocidad y el torque. La aplicación de
accionamientos de CA (corriente alterna) más habitual es en un cuadrante, en la
que la velocidad y el torque siempre tienen la misma dirección: el flujo de la
potencia (velocidad multiplicada por el torque) va del inversor al proceso. En
estas aplicaciones, que suelen ser de bombas y ventiladores, el torque de la
carga tiene un comportamiento cuadrático, por lo que se las suele llamar
aplicaciones a torque variable. Algunas aplicaciones en un cuadrante como las
extrusoras o las cintas transportadoras son aplicaciones a torque constante (el
torque de la carga no tiene por qué cambiar al cambiar la velocidad).
La segunda categoría son las aplicaciones en dos cuadrantes, en las que,
sin que cambie la dirección de rotación, puede cambiar la dirección del torque (el
flujo de potencia puede ir del accionamiento al motor o viceversa). Un
accionamiento en un cuadrante puede serlo en dos, por ejemplo, al decelerar un
ventilador más rápido que de forma natural con las pérdidas mecánicas. En
muchas industrias, un paro de emergencia puede precisar de un funcionamiento
en dos cuadrantes aunque el proceso sea en un cuadrante.
La tercera categoría son las aplicaciones en cuatro cuadrantes en las que
puede cambiar libremente la dirección de la velocidad y el torque. Las más
típicas son ascensores, cabrestantes y grúas, si bien muchos procesos de corte,
plegado, tejeduría y bancos de pruebas de motores pueden necesitar que la
velocidad y el torque cambien repetidamente. También cabe mencionar procesos
en un cuadrante en los que el flujo de potencia va principalmente de la
3
maquinaria al inversor, como una bobinadora o una cinta transportadora
descendente.
Por lo general, desde un punto de vista de ahorro de energía, un motor de
CA con un inversor es mejor que los métodos de control mecánico como el
estrangulamiento. Sin embargo, se presta menos atención al hecho de que
muchos procesos pueden contar con un flujo de la potencia del proceso al
accionamiento.
Existe una enormidad de áreas donde se pueden encontrar este tipo de
procesos los que se indican en la tabla 1.1.
Tabla 1.1: Tipos de procesos y aplicaciones.
Industrias Aplicaciones
Cemento, minería y minerales Montacargas, cintas transportadoras, trituradoras.
Químicos, Petróleo y Gas Bombas, compresores, extrusores, mezcladores.
Metales Laminadoras, enrolladoras, bombas y ventiladores.
Pulpa y Papel Ventiladores, bombas, refinadores y astilladoras.
Generación de energía Ventiladores y bombas.
Otras aplicaciones Bancos de pruebas y túneles de viento.
Figura 1-1: Categorías de aplicaciones de accionamientos
4
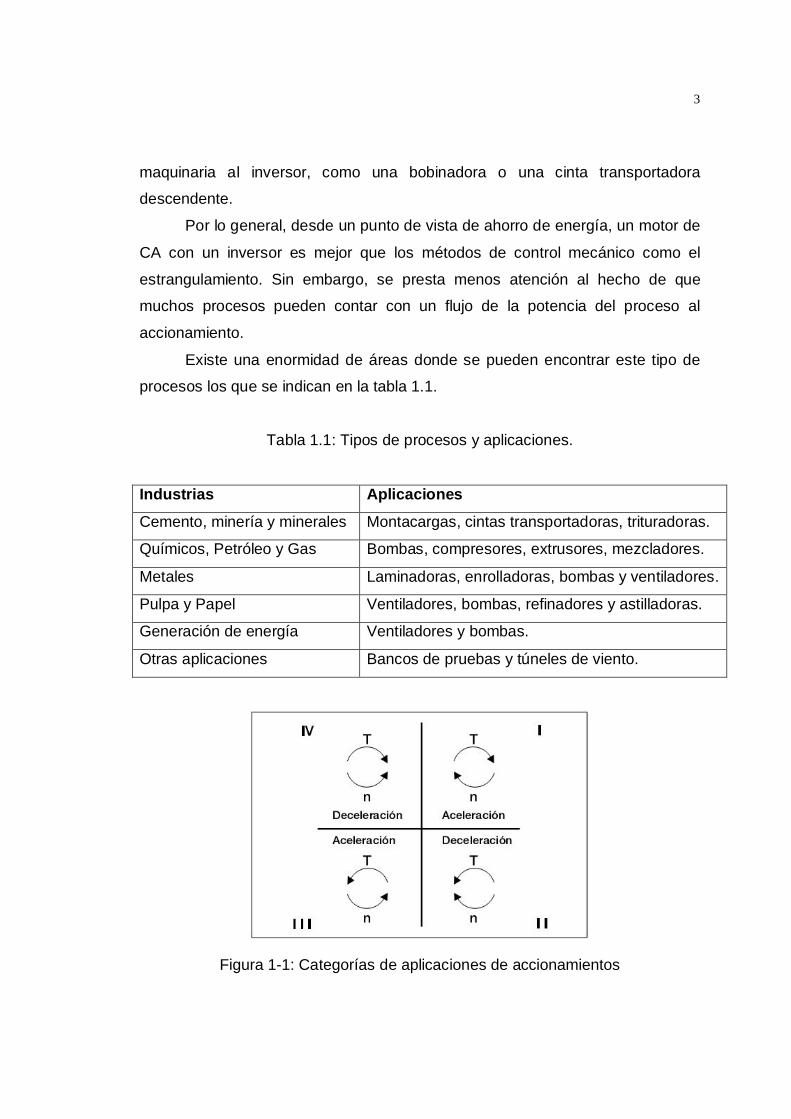
1.2 BARRA CORRIENTE CONTINUA COMÚN (DC LINK)
Los accionamientos de CA modernos constan de un rectificador de
entrada que convierte la tensión de CA en tensión de CC (corriente continua)
que se almacena en condensadores de CC. El inversor convierte a su vez la
tensión de CC en tensión de CA alimentando al motor de CA a la frecuencia
deseada. La potencia de proceso necesaria fluye a través del rectificador, de las
barras de CC y el inversor hacia el motor. La cantidad de energía almacenada en
los condensadores de CC es muy pequeña en comparación con la potencia
necesaria, es decir, el rectificador tiene que dar constantemente la potencia que
necesita el motor más las pérdidas del sistema de accionamiento.
Las alternativas de conexión de este sistema de barra común se muestran
en la figura 1-2, y el significado de cada dispositivo se explica a continuación.
Figura 1-2: Alternativas de conexión DC link

5
1.2.1 Unidad de Alimentación
Las unidades de alimentación convierten la tensión y la intensidad de CA
de red en tensión e intensidad de CC. La potencia se transfiere desde la red al
bus de CC (y, en ciertos casos, a la inversa).
1.2.2 La Unidad Nfe (Non-regenerative front-end)
Es un convertidor de potencia unidireccional (modo motor) para la
alimentación de accionamientos con bus de CC. La NFE es una unidad que
opera como un puente de diodos utilizando componentes diodo/tiristor. Se
emplea una reactancia dedicada externa a la entrada. La NFE es capaz de
cargar el bus de CC. Esta unidad es adecuada como unidad rectificadora cuando
se acepta un nivel normal de armónicos y no se necesita regeneración a red.
1.2.3 La Unidad Ffe (Fundamental Front-End)
Es un convertidor de potencia bi-direccional (regenerativo) para la
alimentación de accionamientos con bus de CC. La FFE es una unidad que
opera como un puente de diodos en modo motor y como un puente de tiristores
en antiparalelo en modo regenerativo. En la unidad FFE se utilizan IGBTs
(Insulated Gate Bipolar Transistor) en lugar de tiristores. Se emplea una
reactancia dedicada externa a la entrada. La unidad FFE es adecuada como
unidad rectificadora cuando se acepta un nivel normal de armónicos, y se
necesita regeneración a red.
1.2.4 La Unidad Afe (Active Front-End)
Es un convertidor de potencia bi-direccional (regenerativo) para la
alimentación de accionamientos con bus de CC. Se emplea un filtro LCL externo
6
a la entrada. Esta solución es adecuada en aplicaciones donde se requiera bajos
armónicos de red.
1.2.5 Inversor
El INU (Inverter unit) es un inversor de potencia bi-direccional, alimentado
en CC, para alimentar y controlar motores de CA. El INU se alimenta desde un
bus de CC. En el caso de que la conexión se realice sobre un bus de CC en
tensión, se necesita un circuito de carga.
1.2.6 Unidad de Freno
El BCU (Brake chopper unit) es un convertidor de potencia unidireccional
para el suministro de energía excedente a resistencias, a partir de un bus de CC,
donde la energía se disipa en forma de calor. Se necesitan resistencias externas.
1.3 REGENERACIÓN IGBT: OBJETIVOS DE REGULACIÓN
En las unidades de regeneración IGBT existen tres objetivos de regulación
generales. El primero consiste en mantener estable la tensión en el DC link con
independencia del valor absoluto y la dirección del flujo de la potencia. Así se
asegura que los inversores que alimentan motores de CA puedan funcionar
óptimamente independientemente del punto de funcionamiento gracias a una
tensión de bus de CC estable. La tensión de bus de CC es estable cuando el
flujo de potencia hacia las barras de CC es igual al de salida de éstas. Esta
regulación del flujo de potencia se consigue regulando el ángulo de potencia
entre los dos sistemas de CA.
El segundo objetivo de regulación consiste en minimizar la intensidad de
alimentación necesaria (funcionar a cos( ) = 1,0), lo que se consigue regulando
la tensión de salida de la unidad convertidora. En algunas aplicaciones se desea

7
que la unidad convertidora IGBT también funcione a modo de carga inductiva o
capacitiva. El tercer objetivo de regulación es minimizar el contenido de
armónicos de la intensidad de alimentación. Los principales criterios de diseño
en este caso son el valor de la reactancia y que el método de regulación sea
adecuado.
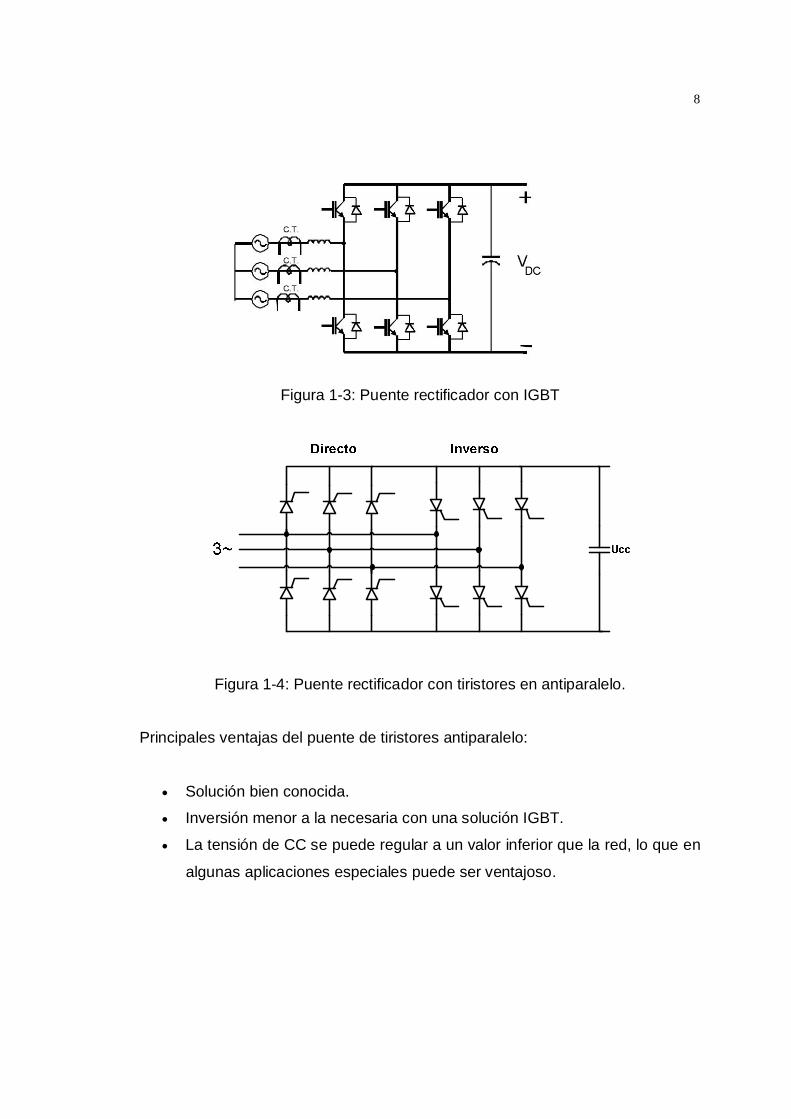
1.4 CONFIGURACIÓN ANTIPARALELO DE PUENTES ATIRISTORES
En un convertidor de frecuencia, los puentes rectificadores de diodos se
pueden sustituir por los dos rectificadores controlados por tiristores en antifase
(figura 1-4). Esta configuración permite cambiar el puente rectificador según el
flujo de potencia que se necesite en el proceso. Los principales componentes de
la unidad de alimentación por tiristores son dos puentes de tiristores de 6 pulsos.
El puente directo convierte la alimentación trifásica de CA en CC. Suministra
alimentación a los convertidores (inversores) mediante el circuito intermedio. El
puente inverso convierte la CC en CA cuando se necesita desviar el poder de
frenado del motor sobrante a la red de alimentación.
Sólo funciona uno de los puentes mientras el otro está bloqueado. El
ángulo de disparo del tiristor se controla constantemente para mantener la
tensión del circuito intermedio al nivel deseado. La selección del puente
directo/inverso y el control de la tensión del circuito intermedio se basan en la
determinación de la intensidad de alimentación, la tensión de alimentación y la
tensión del circuito intermedio. La reactancia de CC filtra las ondulaciones de
corriente del circuito intermedio.
8
Figura 1-3: Puente rectificador con IGBT
Figura 1-4: Puente rectificador con tiristores en antiparalelo.
Principales ventajas del puente de tiristores antiparalelo:
Solución bien conocida.
Inversión menor a la necesaria con una solución IGBT.
La tensión de CC se puede regular a un valor inferior que la red, lo que en
algunas aplicaciones especiales puede ser ventajoso.

9
Principales desventajas del puente de tiristores antiparalelo:
La tensión de bus de CC siempre es inferior a la tensión de alimentación
de CA para mantener un margen de conmutación. De este modo, la
tensión alimentada al motor es más baja que la CA de entrada. Sin
embargo, esto se puede solucionar utilizando un autotransformador
elevador en la alimentación.
Si la CA de alimentación desaparece se corre el riesgo de que se fundan
los fusibles debido a alguna falla de conmutación de los tiristores.
Cos( ) varía con la carga.
La distorsión armónica total es más alta que en las unidades IGBT
regenerativas.
La distorsión de la intensidad fluye a través de otras impedancias de la
red y puede provocar una distorsión de la tensión no deseada en otros
dispositivos alimentados desde el punto donde existe la distorsión de
tensión.
No se dispone de capacidad de frenado durante las fallas momentáneas
de la red principal.
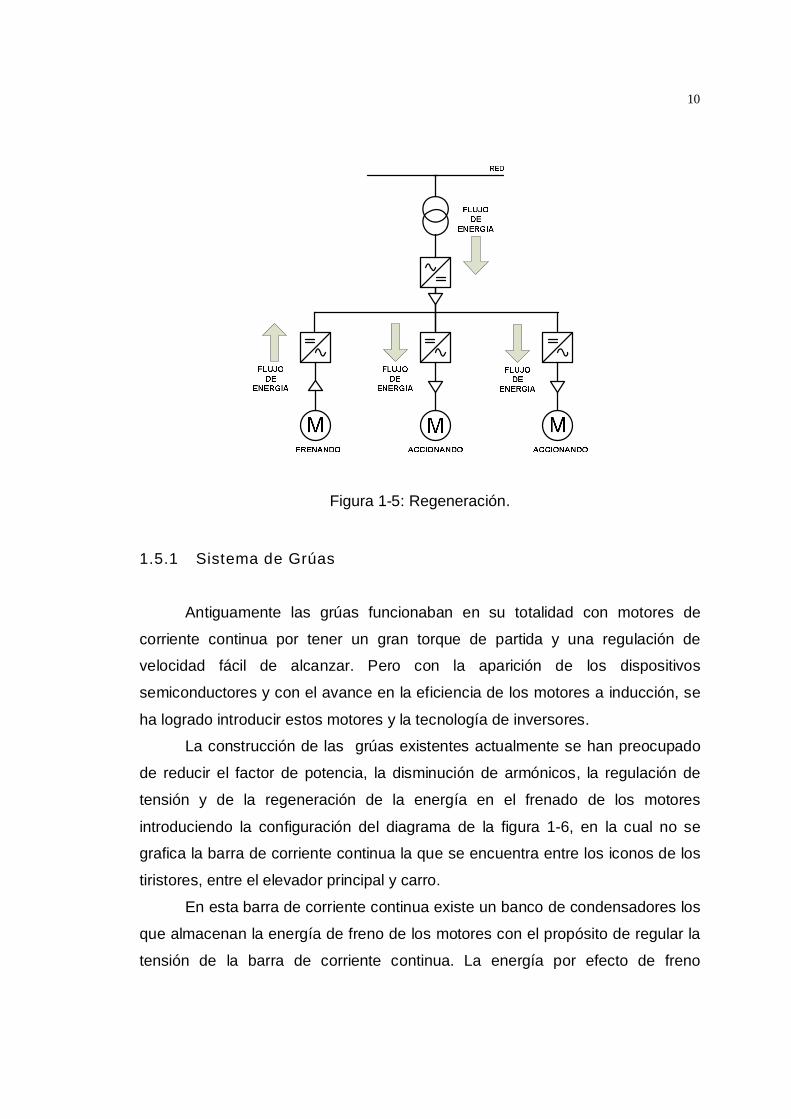
1.5 REGENERACIÓN
Cuando en un proceso hay varios accionamientos y un motor necesita
capacidad de frenado mientras los demás funcionan como motor, la solución con
barras de CC comunes es muy eficaz para reaprovechar la energía mecánica.
Como se explicó anteriormente un sistema de accionamiento con barras de CC
comunes (DC link) consta de un rectificador de alimentación aparte que convierte
CA en CC, e inversores que alimentan a motores de CA conectados a las barras
de CC comunes (las barras de CC son el canal que desplaza la energía de
frenado de un motor en beneficio de los demás motores). En la figura 1-5 se
indica la configuración básica de las barras de CC comunes.
10
Figura 1-5: Regeneración.
1.5.1 Sistema de Grúas
Antiguamente las grúas funcionaban en su totalidad con motores de
corriente continua por tener un gran torque de partida y una regulación de
velocidad fácil de alcanzar. Pero con la aparición de los dispositivos
semiconductores y con el avance en la eficiencia de los motores a inducción, se
ha logrado introducir estos motores y la tecnología de inversores.
La construcción de las grúas existentes actualmente se han preocupado
de reducir el factor de potencia, la disminución de armónicos, la regulación de
tensión y de la regeneración de la energía en el frenado de los motores
introduciendo la configuración del diagrama de la figura 1-6, en la cual no se
grafica la barra de corriente continua la que se encuentra entre los iconos de los
tiristores, entre el elevador principal y carro.
En esta barra de corriente continua existe un banco de condensadores los
que almacenan la energía de freno de los motores con el propósito de regular la
tensión de la barra de corriente continua. La energía por efecto de freno

11
regenerativo es dirigida a la red, para alimentar cargas auxiliares o aprovecharla
por algún motor que sea alimentado por la barra de corriente continua que esté
trabajando en el mismo instante del frenado.
Figura 1-6: Diagrama eléctrico simplificado de grúa.
Figura 1-7: Chooper y resistencia de frenado
12
1.5.2 Resistencia de Frenado
Una posibilidad de limitar la tensión de bus de CC consiste en dirigir la
energía de frenado hacia un banco de resistencia a través de un chopper de
frenado. El chopper de frenado es un conmutador eléctrico que conecta la
tensión de bus de CC a una resistencia en la que la energía de frenado se
transforma en calor. Los chopper de frenado se activan automáticamente cuando
la tensión de bus de CC actual supera un nivel determinado según la tensión
nominal del inversor.
Uno de los inconvenientes del aprovechamiento de la regeneración en las
grúas es que la energía producida por el frenado es muy impulsiva lo que
provoca que sea muy difícil su almacenamiento. Actualmente existe un
dispositivo que está diseñado para almacenar esta energía y además de poder
entregarla cuando se necesite.
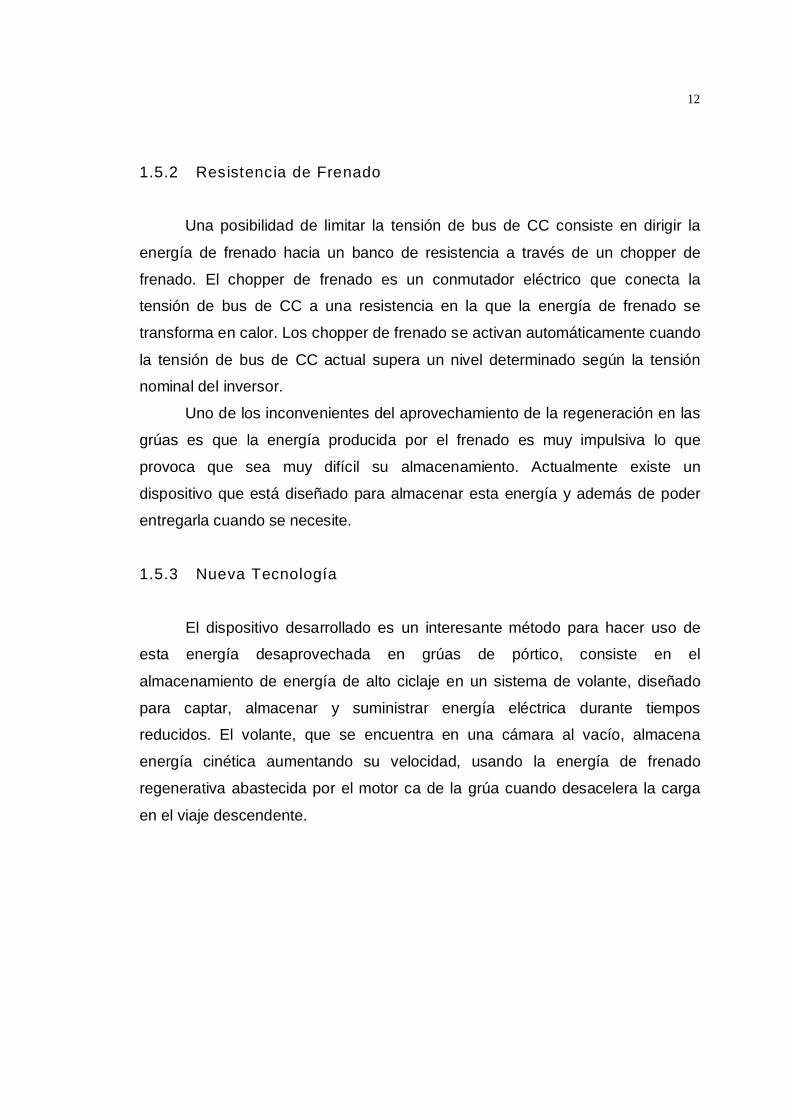
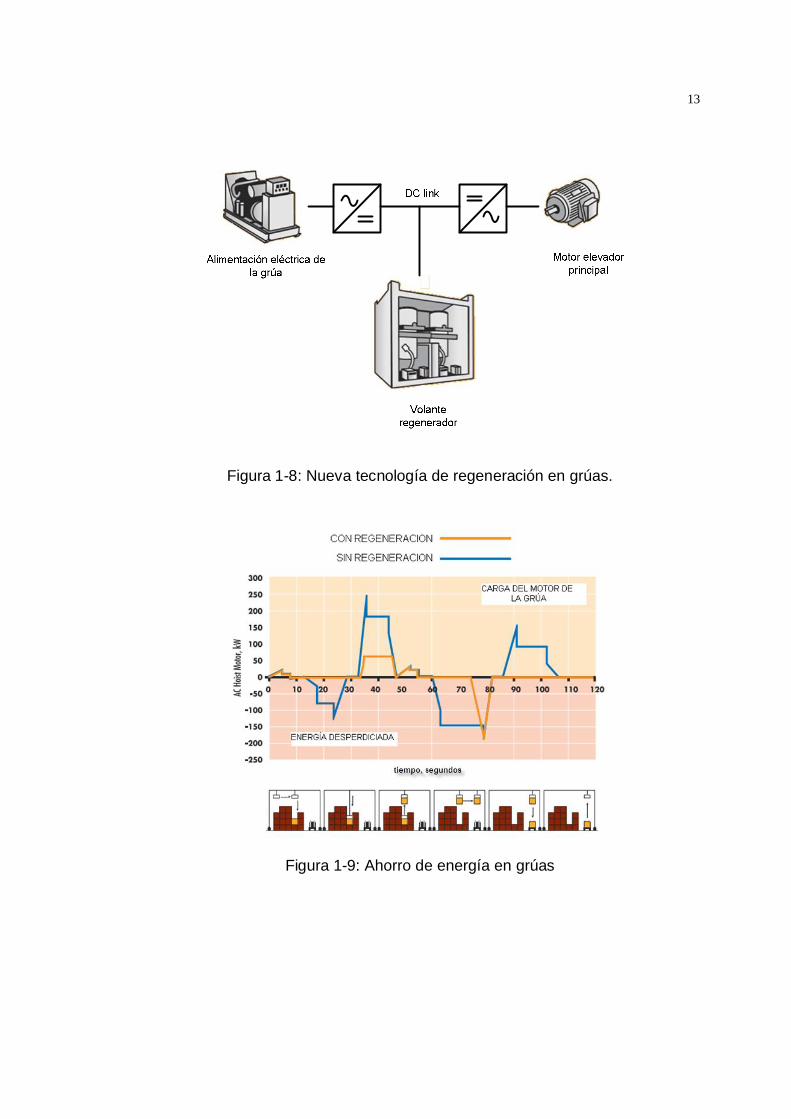
1.5.3 Nueva Tecnología
El dispositivo desarrollado es un interesante método para hacer uso de
esta energía desaprovechada en grúas de pórtico, consiste en el
almacenamiento de energía de alto ciclaje en un sistema de volante, diseñado
para captar, almacenar y suministrar energía eléctrica durante tiempos
reducidos. El volante, que se encuentra en una cámara al vacío, almacena
energía cinética aumentando su velocidad, usando la energía de frenado
regenerativa abastecida por el motor ca de la grúa cuando desacelera la carga
en el viaje descendente.
13
Figura 1-8: Nueva tecnología de regeneración en grúas.
Figura 1-9: Ahorro de energía en grúas

14
Figura 1-10: Motores en paralelo
Como se puede observar en la figura 1-9 el ahorro de energía es
considerable con éste dispositivo de regeneración.
1.5.4 Correas Transportadoras Descendentes
La barra común de corriente continua permite conectar varios motores a
una misma barra, suministrando así un flujo de energía optimizado. La energía
de frenado generada en un motor puede ser transferida a otros inversores a
través de la barra común sin consumo de energía desde la red de suministro. La
eficiencia energética es óptima debido a tener un factor de potencia cercano a la
unidad en todo el rango de velocidad. En las correas de transportación
descendentes el frenado provocado por la carga en los motores es constante, lo
que produce una ventaja con respecto al tipo de regeneración impulsiva de la
grúa.
1.5.5 Ejemplo de Aplicación
La mina Los Pelambres, a 200 km al norte de Santiago y a 45 km al este
de Salamanca, en la provincia de Choapa, fue descubierta en los años 20 por

15
William Braden, uno de los padres de la minería del cobre chilena. Actualmente,
es la quinta mina de cobre más grande del mundo. Equipada con tecnología
Siemens, la cinta en descenso más avanzada del mundo transporta mineral de
cobre desde la mina Los Pelambres, a 3.200 m sobre el nivel del mar, hasta la
planta de concentración, situada a 1.900 m. La cinta está diseñada para mover
un máximo de 8.700 t/h de material a granel y transporta mineral de cobre en
una banda de 1,8 m de ancho a una velocidad de 6 m/s.
En el corazón de los accionamientos de la cinta hay 10 motores trifásicos
de jaula de ardilla con una potencia nominal de 2,5 MW cada uno, alimentados
por convertidores Siemens de media tensión. Una innovadora solución de control
en lazo cerrado y accionamiento basada en productos de automatización
Siemens garantiza un funcionamiento suave permanente de la cinta.
La tecnología GTO y Active Front End (AFE), combinada con un chopper,
permite mantener los tramos de la cinta bajo control. Un sistema que implica la
configuración redundante de sistemas de control y comunicación garantiza la
seguridad de la cinta en todos los modos de operación.
Gracias a la utilización de un moderno sistema de accionamiento, el
transporte del mineral de cobre desde la mina hasta el concentrador permite
generar aproximadamente 19 MW de energía eléctrica, que se devuelven a la
red eléctrica de la planta. Esto reduce los costos de producción del concentrado
de cobre.
1.6 DESCRIPCIÓN DE LAS ESCALERAS MECÁNICAS.
Una escalera mecánica es una escalera inclinada, que se mueve de modo
continuo y que transporta personas hacia arriba y hacia abajo. Las escaleras
mecánicas se utilizan en edificios comerciales, grandes almacenes y en
estaciones de metro y ferrocarril, para conducir un torrente de gente por un
camino limitado de uno a otro nivel.

16
El conjunto consiste en una cadena continua de escalones arrastrada por
un mecanismo con motor eléctrico por medio de dos cadenas de rodillos, una a
cada lado. Los escalones van guiados por rodillos que corren por unas guías que
mantienen las huellas de los escalones en posición horizontal en la zona útil.
Encima de cada barandilla existe un pasamanos a una altura de 0,85 a 1,10m
del borde del escalón, corriendo paralelamente a los peldaños y prácticamente a
la misma velocidad.
El mecanismo de tracción es el mostrado en la figura 1-11, que utiliza un
reductor de tornillo sin fin.
El motor jaula de ardilla es ubicado en la parte superior de la escalera. En
la mayoría de las escaleras este motor es de 6 polos conectado a un reductor el
que produce el giro del eje que provoca el giro de las ruedas dentadas. La mayor
velocidad a que pueden moverse los peldaños de la escalera es de
aproximadamente 0.6 m/seg. En la figura 1-12 se muestra en forma general este
mecanismo.
Figura 1-11: Mecanismo de tracción de las escaleras mecánicas

17
Figura 1-12: Vista general del mecanismo
En la figuras 1-13 se muestran el mecanismo de guía que tienen los
escalones y en la figura 1-14 se puede apreciar la cadena de peldaños que
impulsa los escalones para que rueden por la guía antes mencionada.
La cadena de la figura 1-14 es montada a la rueda dentada del eje
principal de la figura 1-15. El movimiento de este eje principal es producido por
medio de una cadena unida al piñón de la caja de engranaje reductora del motor
de inducción. Todo este funcionamiento es explicado en detalla a continuación.
Figura 1-13: Guía de los escalones

18
Figura 1-14: Cadena de peldaños
Figura 1-15: Rueda dentada para la cadena de peldaños
1.7 FUNCIONAMIENTO DE LA ESCALERA MECÁNICA.
1.7.1 Unidad impulsora
Esta unidad está ubicada en la parte superior de la escalera mecánica,
como se puede apreciar en la figura 1-16, y es la encargada de dar el
movimiento al tren de escalones. Esta unidad está compuesta por un motor de

19
inducción, un reductor de velocidad, el equipamiento eléctrico, dos árboles de
transmisión de potencia mecánica y un freno de servicio.
a) Motor
En esta unidad impulsora se encuentra un motor de inducción trifásico
asincrónico de corriente alterna, tipo jaula de ardilla.
Este motor posee 6 polos, con los cuales alcanza una velocidad de giro de
aproximadamente de 965 RPM a plena carga.
Figura 1-16: Ubicación de la unidad impulsora.
Figura 1-17: La ubicación del motor en la unidad impulsora.

20
La potencia implementada en estas escaleras mecánicas están entre los
rangos de los 5,5 Kw (7,5 Hp) hasta los 11Kw (15 Hp), como se puede apreciar
en la tabla 1.2.
Tabla 1.2: Rango de potencia de motores para escaleras mecánicas.
Anchode
peldañoMm
DesnivelH
mm
PmotorkW
Anchode
peldañoMm
DesnivelH
mm
Pmotor
kW
Anchode
peldañomm
DesnivelH
mm
PmotorkW
3000 5,5 3000 5,5 3000 5,53500 5,5 3500 5,5 3500 5,54000 5,5 4000 5,5 4000 5,54500 5,5 4500 5,5 4500 7,55000 5,5 5000 5,5 5000 7,55500 5,5 5500 7,5 5500 7,5
600
6000 5,5
800
6000 7,5
1000
6000 11,0
La clase de aislamiento es F (155 °C) según norma IEC 34-1 y las
normas de protección de este motor obedecen a la norma IP 55 indicada en la
tabla 1.3.
Tabla 1.3: Protección según norma IP para el motor.
Primernúmero
Protección contrasólidos
Segundonúmero
Protección contra líquidos
5Protección contra
polvo-entrada limitadapermitida
5Protección contra chorros deagua a baja presión de todas
las direcciones
Para el motor de 5,5 Kw de potencia de 50 Hz, se tiene la siguiente curva
característica en función de la potencia provista en porcentaje de la nominal.
El torque en el eje del motor es de 36,33 Nm (Newton·metro), la corriente
nominal para conexión delta es de 13,05 A y mientras que la corriente de partida
es 6 veces la nominal.

21
La eficiencia de este motor a plena carga es del 88,7 %, mientras su factor
de potencia es de aproximadamente 0.83 mientras que el momento de inercia es
de alrededor de 0,01875 kgm².
b) Equipamiento Eléctrico
El gabinete de control se encuentra instalado en la parte superior de la
escalera y está hecho de una lámina de acero, nivel de protección IP 54. Este
se puede rodar hacia fuera en su butaca para que ambas parte, frente y atrás,
tenga una fácil inspección.
Tabla 1.4: Grado de protección IP para gabinete de control.
Primernúmero
Protección contra sólidos Segundonúmero
Protección contralíquidos
5Protección contra polvo-
entrada limitada permitida 4Protegido contra rocíos
directosde todas lasdirecciones
Figura 1-18: Curvas características de motor estándar.

22
Sumándose al interruptor principal con protección magneto térmica, el
gabinete de control también contiene los siguientes equipos:
-arrancador estrella-triángulo
-Subida/bajada interruptores remotos viajeros.
-relé de operación de mantenimiento.
-un relé de freno.
-un transformador.
-interruptor de seguridad.
-un completo control de velocidad y protección contra movimiento inverso
accidental de la escalera.
c) Engranaje
En este tipo de escalera el motor CA es situado en forma vertical a la
escalera, como es posible apreciar en la figura 1-19. El motor de inducción es
unido a una caja de engranaje tipo tornillo sin fin y corona el que reduce la
velocidad de 965 rpm a aproximadamente 32 rpm.
Figura 1-19: Motor y engranaje.
23
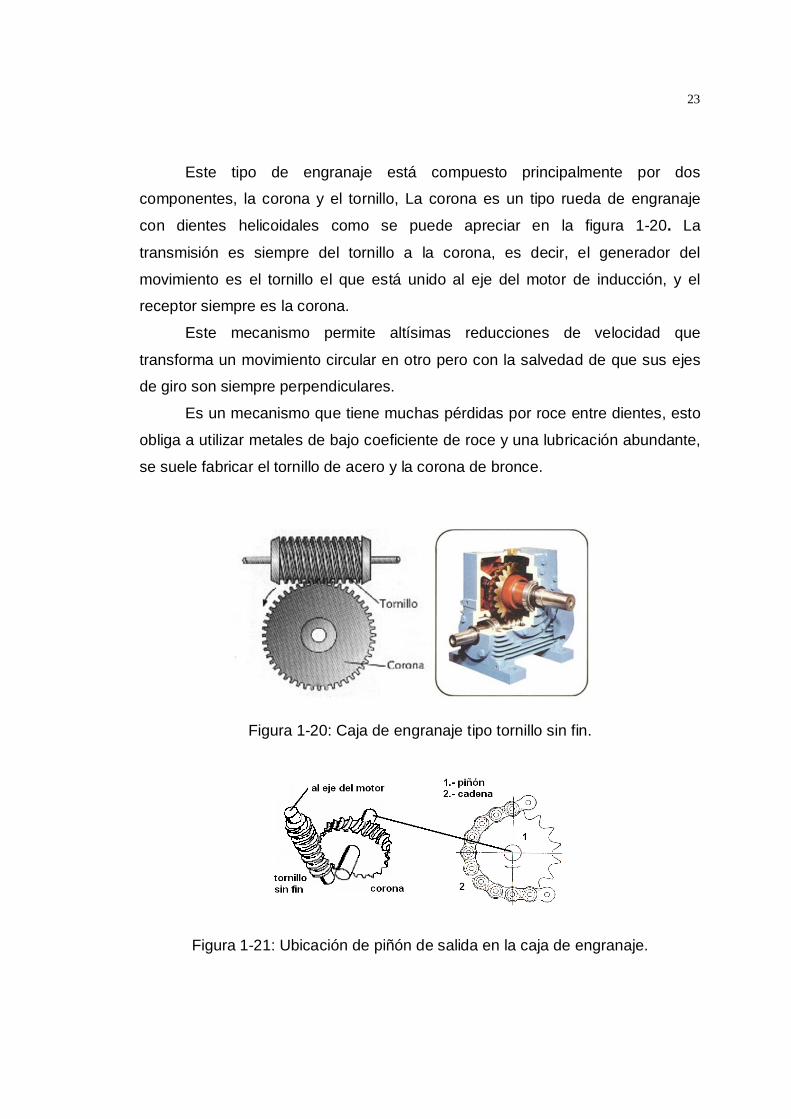
Este tipo de engranaje está compuesto principalmente por dos
componentes, la corona y el tornillo, La corona es un tipo rueda de engranaje
con dientes helicoidales como se puede apreciar en la figura 1-20. La
transmisión es siempre del tornillo a la corona, es decir, el generador del
movimiento es el tornillo el que está unido al eje del motor de inducción, y el
receptor siempre es la corona.
Este mecanismo permite altísimas reducciones de velocidad que
transforma un movimiento circular en otro pero con la salvedad de que sus ejes
de giro son siempre perpendiculares.
Es un mecanismo que tiene muchas pérdidas por roce entre dientes, esto
obliga a utilizar metales de bajo coeficiente de roce y una lubricación abundante,
se suele fabricar el tornillo de acero y la corona de bronce.
Figura 1-20: Caja de engranaje tipo tornillo sin fin.
Figura 1-21: Ubicación de piñón de salida en la caja de engranaje.
24
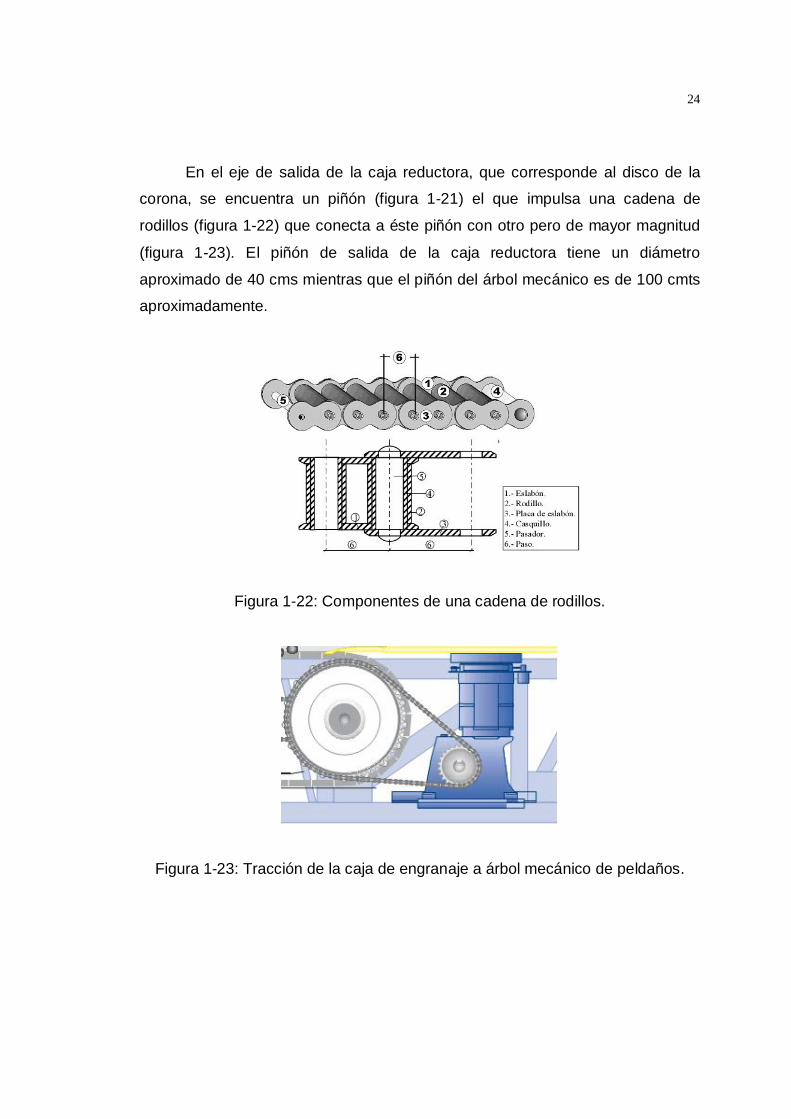
En el eje de salida de la caja reductora, que corresponde al disco de la
corona, se encuentra un piñón (figura 1-21) el que impulsa una cadena de
rodillos (figura 1-22) que conecta a éste piñón con otro pero de mayor magnitud
(figura 1-23). El piñón de salida de la caja reductora tiene un diámetro
aproximado de 40 cms mientras que el piñón del árbol mecánico es de 100 cmts
aproximadamente.
Figura 1-22: Componentes de una cadena de rodillos.
Figura 1-23: Tracción de la caja de engranaje a árbol mecánico de peldaños.
25
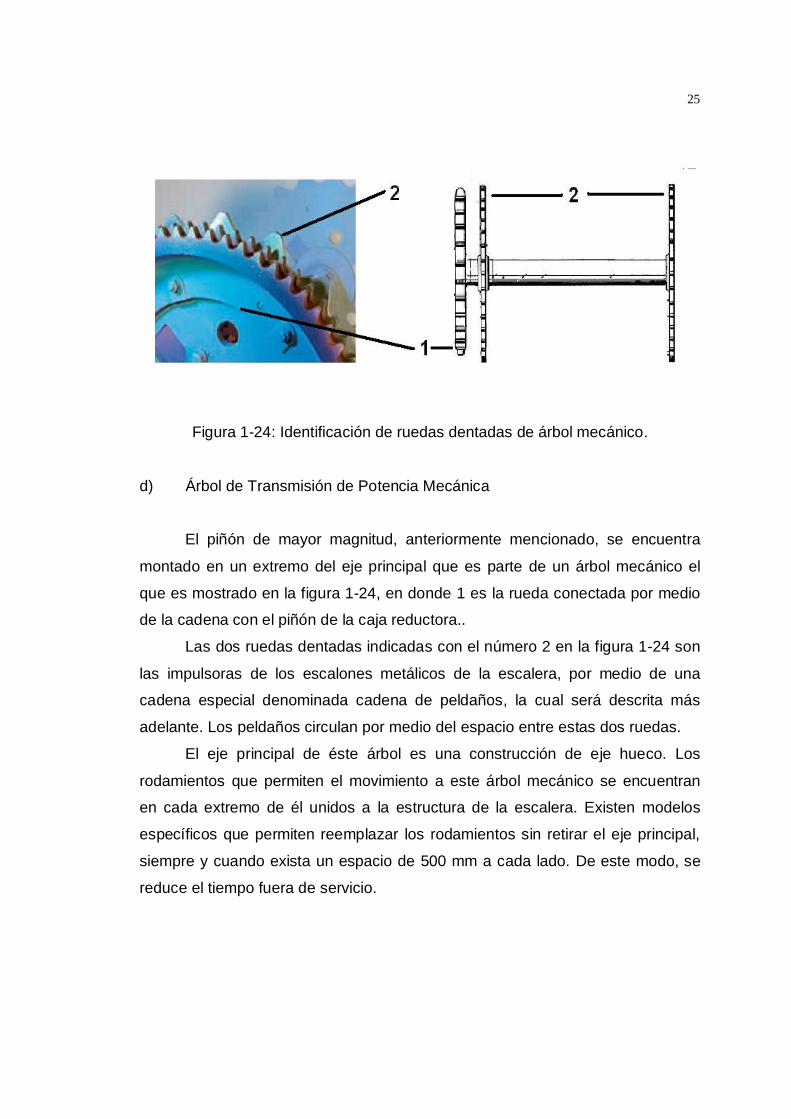
Figura 1-24: Identificación de ruedas dentadas de árbol mecánico.
d) Árbol de Transmisión de Potencia Mecánica
El piñón de mayor magnitud, anteriormente mencionado, se encuentra
montado en un extremo del eje principal que es parte de un árbol mecánico el
que es mostrado en la figura 1-24, en donde 1 es la rueda conectada por medio
de la cadena con el piñón de la caja reductora..
Las dos ruedas dentadas indicadas con el número 2 en la figura 1-24 son
las impulsoras de los escalones metálicos de la escalera, por medio de una
cadena especial denominada cadena de peldaños, la cual será descrita más
adelante. Los peldaños circulan por medio del espacio entre estas dos ruedas.
El eje principal de éste árbol es una construcción de eje hueco. Los
rodamientos que permiten el movimiento a este árbol mecánico se encuentran
en cada extremo de él unidos a la estructura de la escalera. Existen modelos
específicos que permiten reemplazar los rodamientos sin retirar el eje principal,
siempre y cuando exista un espacio de 500 mm a cada lado. De este modo, se
reduce el tiempo fuera de servicio.

26
e) Freno de Servicio
Este freno de servicio se adapta automáticamente al sentido de giro del
motor, además de reducir en un tercio el par de frenado en la marcha
ascendente,
evita así que los pasajeros pierdan el equilibrio. Este freno está ubicado en la
parte superior del motor de inducción, el que es mostrado en la figura 1-25.
1.7.2 Mecanismo de Los Peldaños.
Este mecanismo está compuesto por los peldaños y la cadena de
peldaños.
a) Peldaños
Los peldaños son fabricados en aluminio fundido a presión, con doble
moldura de aluminio y pintados al polvo. Están diseñados con una alta
resistencia a la deformación y soportan alta tensión mecánica.
Figura 1-25: Ubicación del freno de servicio.

27
Figura 1-26: Peldaño.
Figura 1-27: Peldaño con rodillos.
Las dimensiones de los peldaños son de 400 mm de profundidad y de
ancho están fabricados de 1000, 800 y 600 mm.
A estos peldaños se montan un par de patines de deslizamiento situados
a cada lado de estos escalones, mostrado en la figura 1-27, los que aseguran
una distancia uniforme entre los mismos y las láminas de zócalo, dejando una
separación mínima.
b) Cadena de Peldaños
La cadena de peldaños se puede apreciar en la figura 1-28. Esta cadena
es impulsada por la rueda dentada número 2 mostrada en la figura 1-24.

28
Figura 1-28: Cadena de peldaños.
Figura 1-29: Unión de los escalones a la cadena de peldaños.
Esta cadena va unida a los peldaños como lo indica la figura 1-29. La
velocidad máxima de movimiento que pueden adquirir los peldaños es de 0.65
m/seg y el grado de inclinación máximo de la escalera es de 35° con respecto
del suelo.
Como se puede apreciar en esta figura, los peldaños están distanciados
uno de otro por medio de un eslabón de la cadena de peldaños.
El movimiento que realizan los peldaños para recorrer la escalera se lleva
a cabo, gracias al arrastre de la escalera por medio de una guía de cadena
indicada con el número 1 en la figura 1-30 y a la guía de rodillos indicada con el
número 2 en la misma figura.
En la parte baja de la escalera se encuentran otras 2 rueda dentada de las
mismas dimensiones de las ruedas que se encuentran en la parte superior
encargadas de impulsar la cadena de peldaños. Estas ruedas están unidas por

29
un eje el que en cada extremo posee un rodamiento adherido a la estructura de
la escalera.
1.7.3 Mecanismo De Tracción De Las Barandas
En la unidad impulsora se encuentran 2 árboles mecánicos encargados de
impulsar la cadena de peldaños, ya descrito anteriormente, y otro que es el
encargado de entregar tracción a los pasamanos. Este último es impulsado a
través de un piñón ubicado en el centro del eje del árbol mecánico encargado de
mover los peldaños como se puede apreciar en la figura 1-32.
La banda de los pasamanos es fabricada con un material plástico de alta
resistencia mecánica y muy flexible. En la figura 1-33 se muestra una sección de
la banda del pasamanos y la balaustrada por donde se desliza dicha banda.
Figura 1-30: Rueda dentada inferior.
Figura 1-31: Guía de peldaños.

30
Figura 1-32: Mecanismo de impulsión del árbol mecánico para las barandas.
Figura 1-33: Pasamanos y balaustrada.
Para lograr el movimiento de la banda del pasamanos por la balaustrada
estas escaleras utilizan un sistema que posee una especie de grupos de rodillos
los que cumplen la función de tensores para la banda del pasamano y además
permiten el deslizamiento de la banda del pasamano, este sistema puede ser
apreciado en la figura 1-34. La velocidad de la banda debe ser similar a la de los
peldaños.

31
Figura 1-34: Sistema de rodillos para los pasamanos.

32
CAPÍTULO 2
SISTEMA REGENERATIVO IMPLEMENTADO EN ESCALERAS MECÁNICAS
2.1 SIMULACIÓN EN SIMULINK
El circuito simulado para ser implementado en un par de escaleras
convencionales, una de estas ascendente y la otra descendente, es el mostrado
en la figura 2-1. En esta figura se puede apreciar que cada una de las escaleras
está compuesta principalmente por un rectificador trifásico, un condensador en el
lado CC, un inversor trifásico con modulación PWM, y un motor de inducción con
rotor jaula de ardilla. los circuitos correspondientes a cada escalera están unidos
en paralelo por medio del enlace CC, el que permitirá la regeneración de
energía, desde el motor de la escalera descendente a la ascendente.
Figura 2-1: Circuito implementado en simulink.

33
Esta primera simulación se realizará con un motor de inducción jaula de
ardilla de 5,5 KW y de 6 polos, al cual se le aplicara un torque en el eje,
simulando la carga de la escalera con pasajeros.
Esta sección se dividirá en dos partes, una mostrará las gráficas
correspondientes al motor encargado de mover la escalera en forma
descendente al que llamaremos motor 1 y al encargado de moverla en forma
ascendente al que denominaremos motor 2.
Se debe aclarar que en esta simulación el torque positivo en el eje de un
motor este trabajará en modo generador mientras que un torque negativo la
máquina funcionará en modo motor.
En esta primera simulación al motor 1 se aplicó una carga variable
mostrada en la figura 2-2, como se puede observar este torque cambia de 0 a 66
% del torque nominal en 2.5 seg, luego se eleva a 83% en 3 seg y finalmente
sube al 100% en 3.5 seg que correspondería al torque máximo soportado por el
motor.
Figura 2-2: Torque en el motor 1.
34
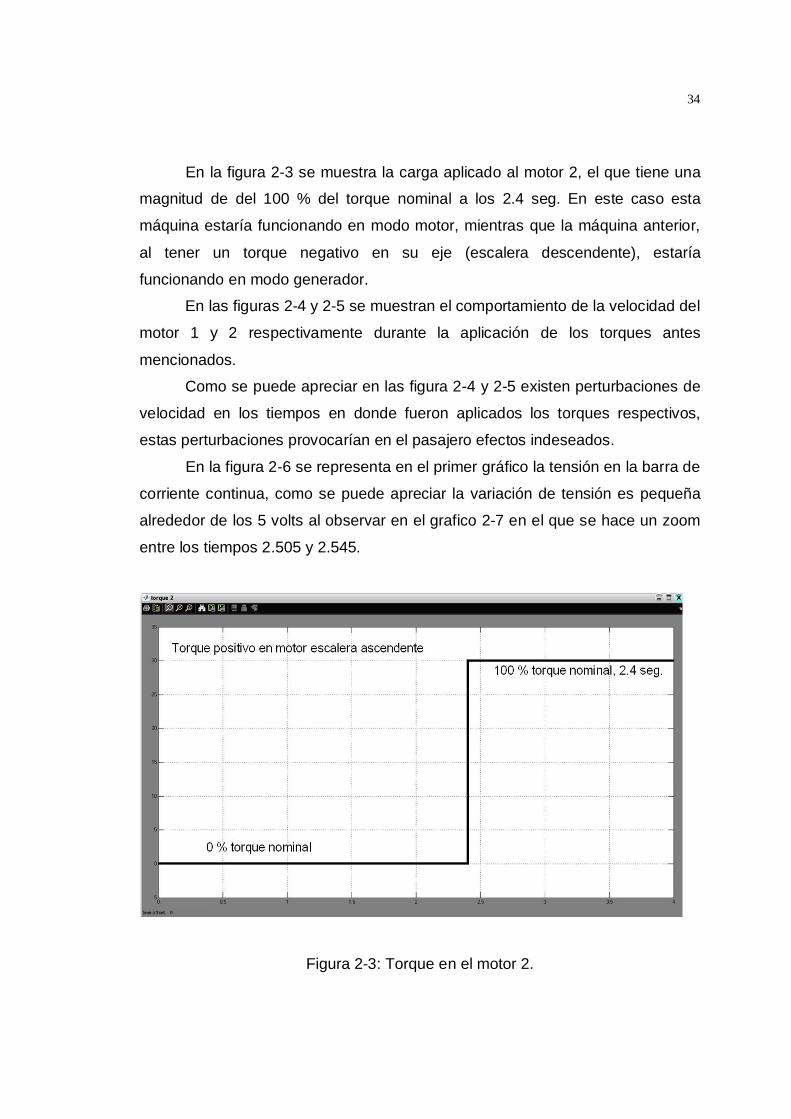
En la figura 2-3 se muestra la carga aplicado al motor 2, el que tiene una
magnitud de del 100 % del torque nominal a los 2.4 seg. En este caso esta
máquina estaría funcionando en modo motor, mientras que la máquina anterior,
al tener un torque negativo en su eje (escalera descendente), estaría
funcionando en modo generador.
En las figuras 2-4 y 2-5 se muestran el comportamiento de la velocidad del
motor 1 y 2 respectivamente durante la aplicación de los torques antes
mencionados.
Como se puede apreciar en las figura 2-4 y 2-5 existen perturbaciones de
velocidad en los tiempos en donde fueron aplicados los torques respectivos,
estas perturbaciones provocarían en el pasajero efectos indeseados.
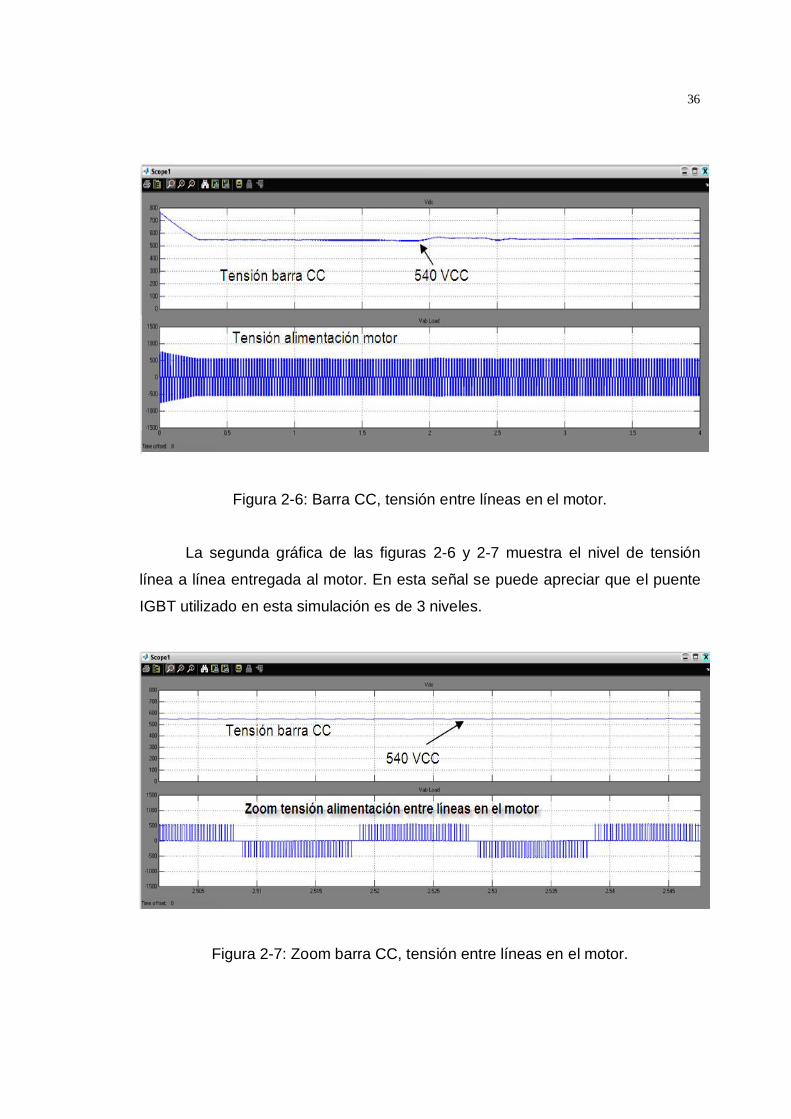
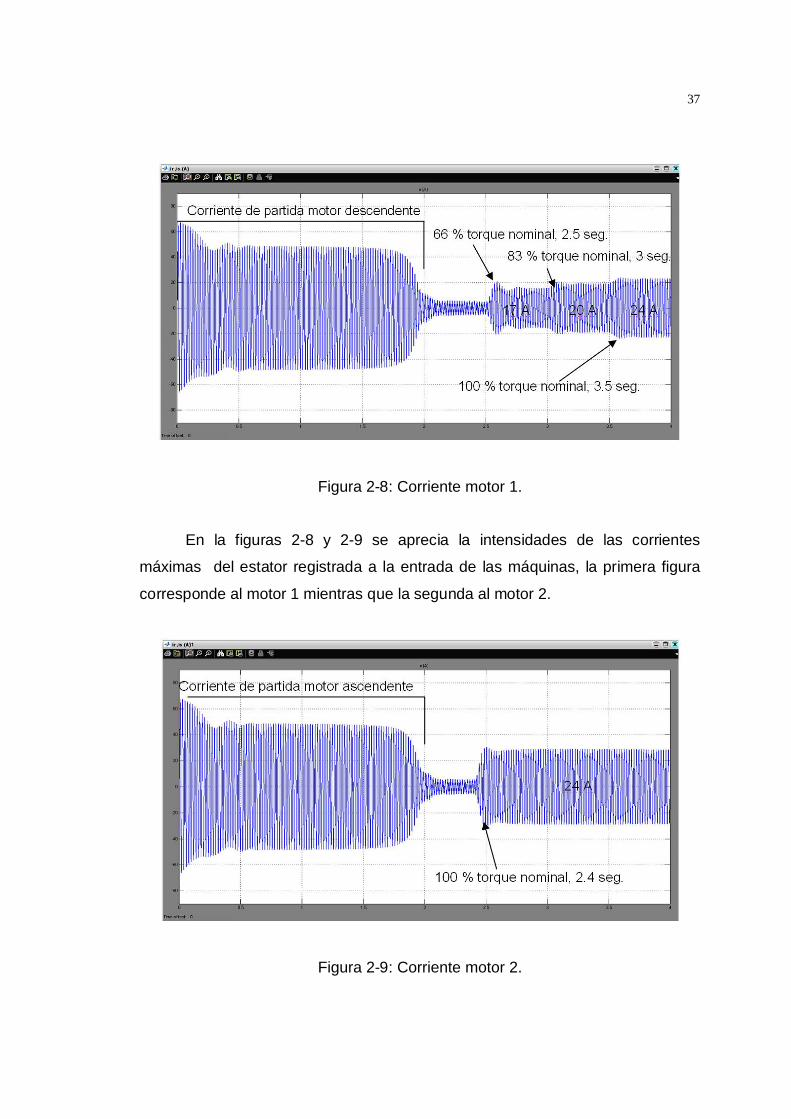
En la figura 2-6 se representa en el primer gráfico la tensión en la barra de
corriente continua, como se puede apreciar la variación de tensión es pequeña
alrededor de los 5 volts al observar en el grafico 2-7 en el que se hace un zoom
entre los tiempos 2.505 y 2.545.
Figura 2-3: Torque en el motor 2.

35
Figura 2-4: Velocidad motor 1.
Figura 2-5: Velocidad motor 2
36
Figura 2-6: Barra CC, tensión entre líneas en el motor.
La segunda gráfica de las figuras 2-6 y 2-7 muestra el nivel de tensión
línea a línea entregada al motor. En esta señal se puede apreciar que el puente
IGBT utilizado en esta simulación es de 3 niveles.
Figura 2-7: Zoom barra CC, tensión entre líneas en el motor.
37
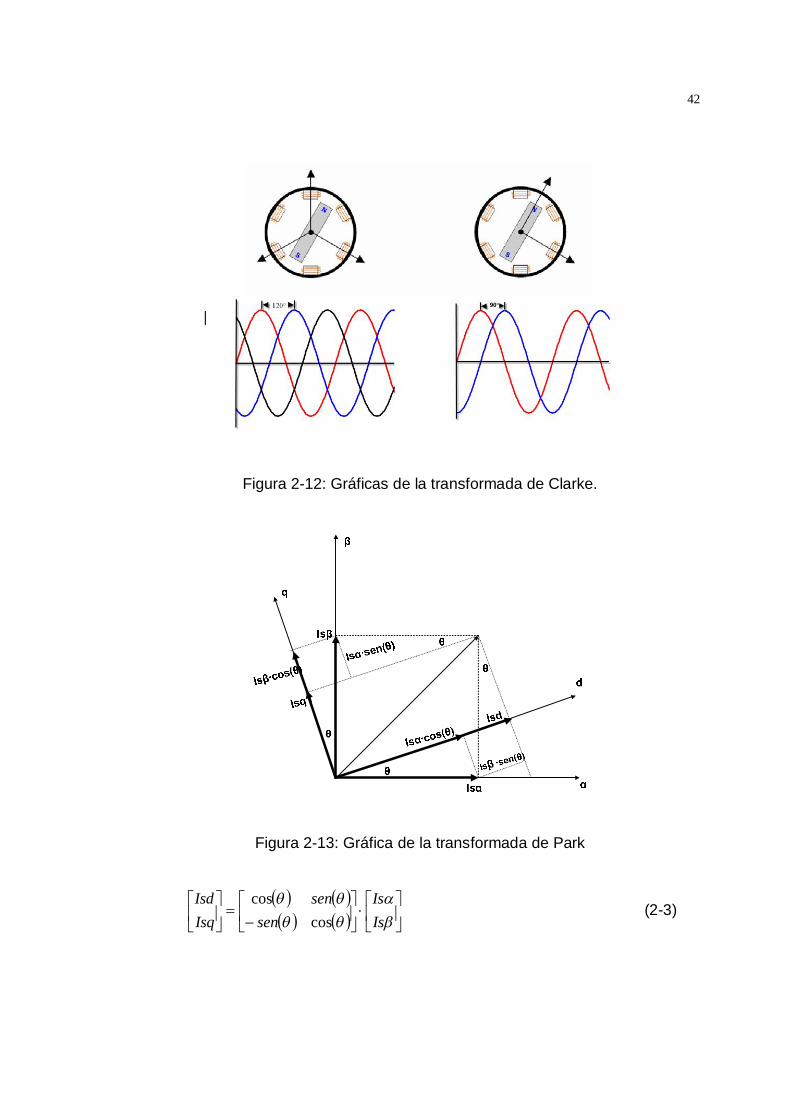
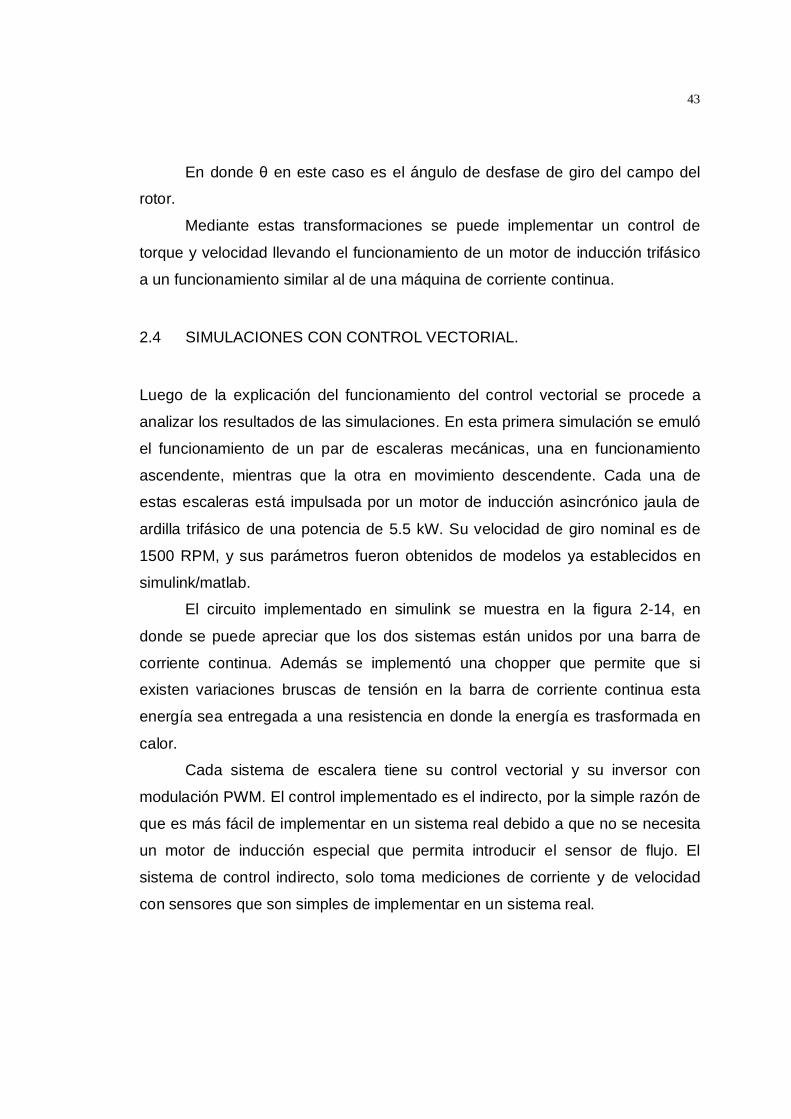
Figura 2-8: Corriente motor 1.
En la figuras 2-8 y 2-9 se aprecia la intensidades de las corrientes
máximas del estator registrada a la entrada de las máquinas, la primera figura
corresponde al motor 1 mientras que la segunda al motor 2.
Figura 2-9: Corriente motor 2.

38
Figura 2-10: Torques y corriente del circuito.
La figura 2-10 muestra la corriente pedida por todo el circuito, registrada
justo después de la red de 400 V. Como se puede apreciar la disminución de la
corriente después de la aplicación de las cargas en los ejes de los motores, es
decir, luego de los 2.4 seg., está relacionada directamente con la regeneración
de energía entregada desde el motor 1 al motor 2.
2.2 INTRODUCCIÓN IMPLEMENTACIÓN DEL CONTROL VECTORIAL
El propósito de implementar un control vectorial para el sistema de
escaleras convencionales es que la mayoría de estas escaleras poseen un
engranaje tornillo sin fin el que no permite regeneración. El motivo de esta
limitante es que este tipo de engranaje es auto bloqueante es decir el generador
del movimiento es el tornillo y el receptor siempre es la corona, no permite el
movimiento para ambos extremos. El tornillo esta unido al eje del motor como se
dijo en el capítulo anterior. Para que pueda realizarse la regeneración se
necesita un tipo de engranaje que permita la generación del movimiento para
ambos extremos, es decir, no debe ser auto bloqueante. Al implementar un

39
engranaje con estas características al motor de la escalera, la velocidad de éste
disminuye al ir aumentando la carga a este engranaje, lo que no sucede con el
engranaje tornillo sin fin, lo que es un efecto no deseado, que se soluciona
aplicando un control vectorial al accionamiento del motor, permitiendo mantener
la velocidad del motor y la escalera, en un valor deseado. Se debe tener en
cuenta que si con éste control vectorial se reduce la velocidad a una inferior a la
nominal del motor, al actuar en modo generador, disminuye su capacidad de
regeneración, es decir, al disminuir la velocidad nominal del motor, menor será
su potencia de generación, por lo que se optó por controlar la velocidad nominal
del motor, para que su generación sea la máxima posible.
2.3 DESCRIPCIÓN DEL CONTROL VECTORIAL
El control vectorial es la herramienta que permite controlar en forma
óptima los parámetros de los motores de inducción, al no considerar únicamente
su funcionamiento estático ante la corriente trifásica.
La estructura del control de los motores de inducción es complicada,
partiendo del hecho de que el campo magnético de la máquina es rotatorio, y de
que las corrientes y el flujo del rotor en los motores de jaula de ardilla, no pueden
ser directamente sensadas.
En una máquina de corriente continua, los ejes de la armadura y el
arrollamiento de campo son usualmente ortogonales el uno del otro. La fuerza
electromotriz establecida por la corriente en el devanado también será ortogonal.
Si la saturación del hierro es ignorada, el campo ortogonal producido no induciría
interacción sobre ningún otro.
El torque desarrollado puede ser expresado como:
afaem IIKT (2-1)

40
En donde Ka es una constante, (If), el flujo del campo, e Ia, la corriente
de armadura. El ángulo de torque es naturalmente 90°, el flujo es controlado por
medio del ajuste de la corriente de campo, If, y el torque puede ser controlado
independientemente del flujo por medio de la corriente de armadura, Ia. En vista
que la constante de tiempo del circuito de armadura es usualmente mucho más
pequeño que el del devanado de campo, controlando el torque por medio del
cambio de corriente de armadura es más rápido que con el cambio de la If, o por
medio de ambas.
En general, el control de torque de la máquina trifásica de inducción no es
tan directo como el de la máquina de corriente continua porque la interacción
entre el estator y la orientación del campo del rotor no se mantiene
espacialmente a 90° dependiendo de la condición de operación. El campo del
devanado del rotor en una máquina de inducción puede ser comparado con el
devanado de campo de la máquina de corriente continua, excepto que el
inducido no puede ser controlado independientemente.
Los mecanismos de producción de torque en las máquinas de corriente
directa, como se señaló anteriormente, son similares a los de las máquinas de
corriente alterna. Se puede demostrar con el uso de principios físicos y la teoría
del vector espacial, que de la misma forma en que ocurre en un motor de
corriente continua de excitación independiente, el torque electromagnético
instantáneo en un motor de inducción puede ser expresado como el producto de
las corrientes que producen flujo y torque.
El denominado control vectorial controla el vector de corrientes
directamente en un espacio de referencia ortogonal y rotacional, denominado
espacio d-q (direct-quadrature).
Este espacio de referencia esta normalmente alineado con el rotor de
forma que permite que el control del flujo y del torque del motor se realice de
forma independiente. La componente directa permite controlar el flujo, mientras
que la componente en cuadratura controla el torque.

41
Para poder realizar este control se requiere transformar matemáticamente
las medidas de las 3 corrientes referidas al espacio estático de las bobinas del
motor al espacio rotacional d-q. Para realizar este cambio de coordenadas se
utiliza “la transformada de Clarke” la que realiza la transformación de un sistema
de 3 fases equiespaciados (a,b,c) a uno de 2 fases ortogonales ( ).
IcIbIa
sensenIsIs
202coscos1
32 (2-2)
En donde =120°
Para lograr el cambio de coordenadas ortogonales estacionario ( ) a
uno rotacional (d,q) se utiliza “la transformada de Park”
Figura 2-11: Cambio de coordenadas de la transformada de Clarke.
42
Figura 2-12: Gráficas de la transformada de Clarke.
Figura 2-13: Gráfica de la transformada de Park
IsIs
sensen
IsqIsd
coscos
(2-3)
43
En donde en este caso es el ángulo de desfase de giro del campo del
rotor.
Mediante estas transformaciones se puede implementar un control de
torque y velocidad llevando el funcionamiento de un motor de inducción trifásico
a un funcionamiento similar al de una máquina de corriente continua.
2.4 SIMULACIONES CON CONTROL VECTORIAL.
Luego de la explicación del funcionamiento del control vectorial se procede a
analizar los resultados de las simulaciones. En esta primera simulación se emuló
el funcionamiento de un par de escaleras mecánicas, una en funcionamiento
ascendente, mientras que la otra en movimiento descendente. Cada una de
estas escaleras está impulsada por un motor de inducción asincrónico jaula de
ardilla trifásico de una potencia de 5.5 kW. Su velocidad de giro nominal es de
1500 RPM, y sus parámetros fueron obtenidos de modelos ya establecidos en
simulink/matlab.
El circuito implementado en simulink se muestra en la figura 2-14, en
donde se puede apreciar que los dos sistemas están unidos por una barra de
corriente continua. Además se implementó una chopper que permite que si
existen variaciones bruscas de tensión en la barra de corriente continua esta
energía sea entregada a una resistencia en donde la energía es trasformada en
calor.
Cada sistema de escalera tiene su control vectorial y su inversor con
modulación PWM. El control implementado es el indirecto, por la simple razón de
que es más fácil de implementar en un sistema real debido a que no se necesita
un motor de inducción especial que permita introducir el sensor de flujo. El
sistema de control indirecto, solo toma mediciones de corriente y de velocidad
con sensores que son simples de implementar en un sistema real.

44
Figura 2-14: Circuito implementado en simulink
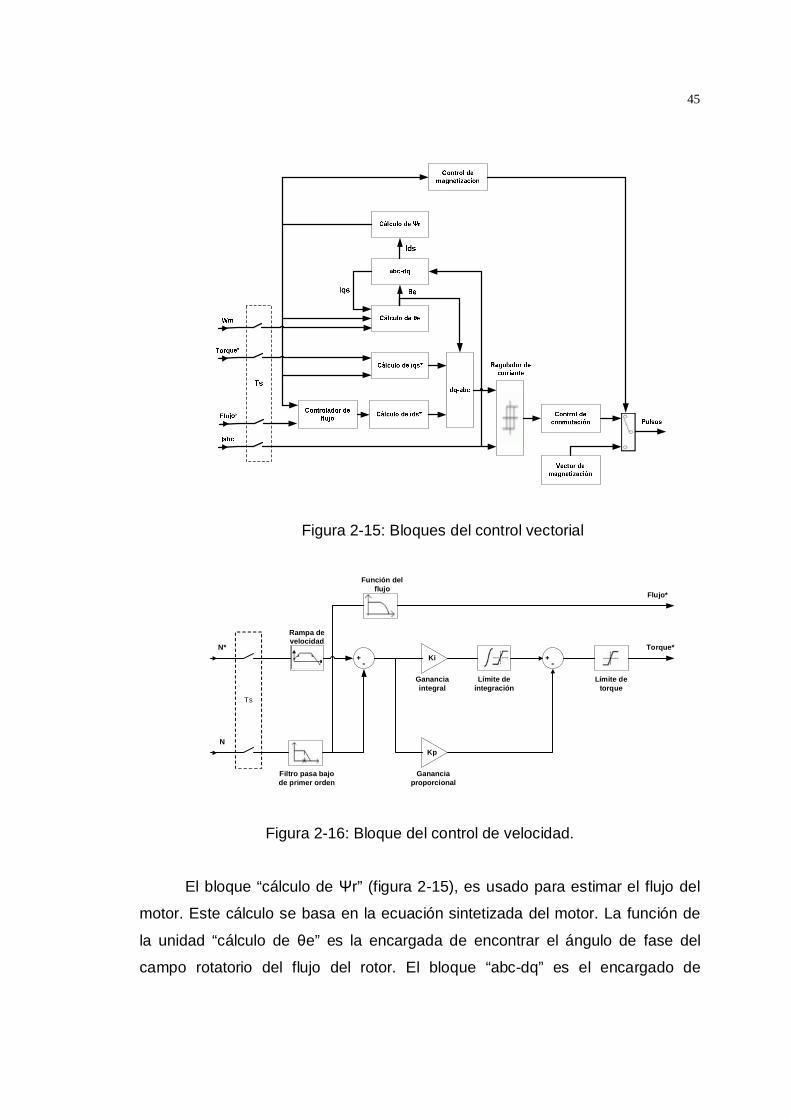
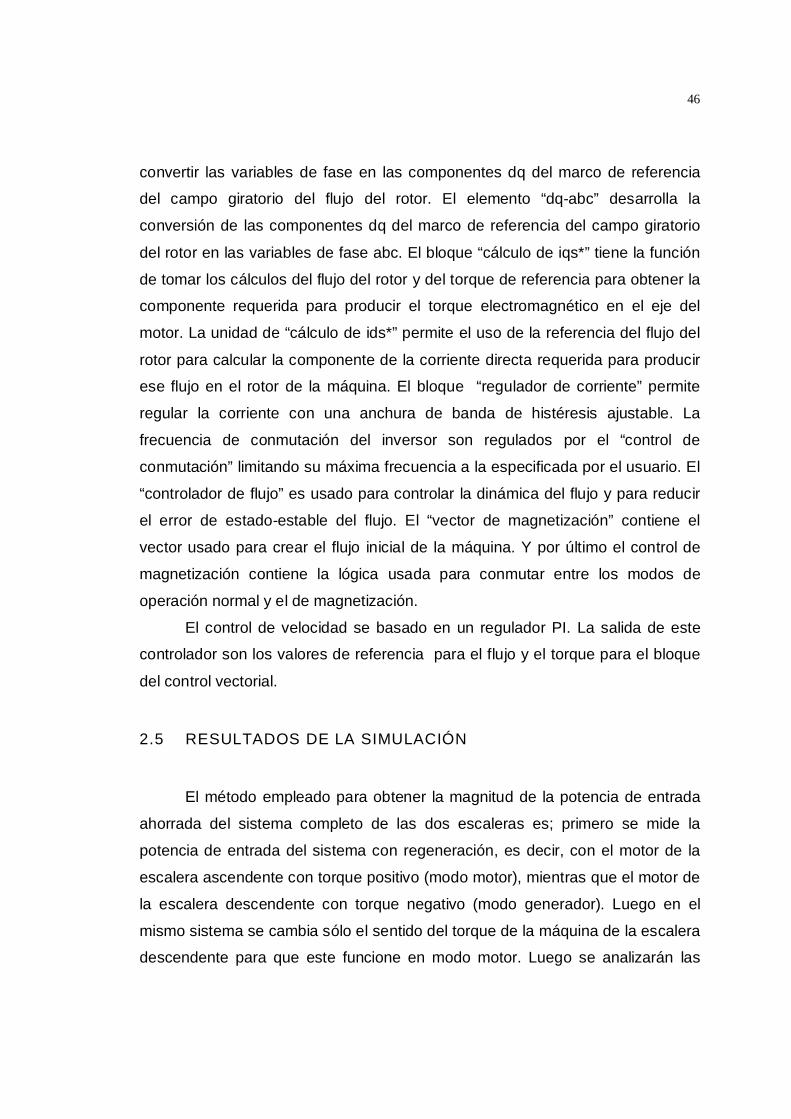
La figura 2-15 muestra los bloques del control vectorial mientras que en la
figura 2-16 se puede apreciar el control de velocidad del motor de inducción.
45
Figura 2-15: Bloques del control vectorial
N
N*
-+ Ki
Kp
+ -
Función delflujo
Rampa develocidad
Filtro pasa bajode primer orden
Gananciaproporcional
Gananciaintegral
Límite deintegración
Límite detorque
Flujo*
Torque*
Ts
Figura 2-16: Bloque del control de velocidad.
El bloque “cálculo de r” (figura 2-15), es usado para estimar el flujo del
motor. Este cálculo se basa en la ecuación sintetizada del motor. La función de
la unidad “cálculo de e” es la encargada de encontrar el ángulo de fase del
campo rotatorio del flujo del rotor. El bloque “abc-dq” es el encargado de
46
convertir las variables de fase en las componentes dq del marco de referencia
del campo giratorio del flujo del rotor. El elemento “dq-abc” desarrolla la
conversión de las componentes dq del marco de referencia del campo giratorio
del rotor en las variables de fase abc. El bloque “cálculo de iqs*” tiene la función
de tomar los cálculos del flujo del rotor y del torque de referencia para obtener la
componente requerida para producir el torque electromagnético en el eje del
motor. La unidad de “cálculo de ids*” permite el uso de la referencia del flujo del
rotor para calcular la componente de la corriente directa requerida para producir
ese flujo en el rotor de la máquina. El bloque “regulador de corriente” permite
regular la corriente con una anchura de banda de histéresis ajustable. La
frecuencia de conmutación del inversor son regulados por el “control de
conmutación” limitando su máxima frecuencia a la especificada por el usuario. El
“controlador de flujo” es usado para controlar la dinámica del flujo y para reducir
el error de estado-estable del flujo. El “vector de magnetización” contiene el
vector usado para crear el flujo inicial de la máquina. Y por último el control de
magnetización contiene la lógica usada para conmutar entre los modos de
operación normal y el de magnetización.
El control de velocidad se basado en un regulador PI. La salida de este
controlador son los valores de referencia para el flujo y el torque para el bloque
del control vectorial.
2.5 RESULTADOS DE LA SIMULACIÓN
El método empleado para obtener la magnitud de la potencia de entrada
ahorrada del sistema completo de las dos escaleras es; primero se mide la
potencia de entrada del sistema con regeneración, es decir, con el motor de la
escalera ascendente con torque positivo (modo motor), mientras que el motor de
la escalera descendente con torque negativo (modo generador). Luego en el
mismo sistema se cambia sólo el sentido del torque de la máquina de la escalera
descendente para que este funcione en modo motor. Luego se analizarán las

47
curvas de la potencia de entrada y se observará la magnitud del ahorro de
energía realizando la diferencia entre estas dos curvas.
El control vectorial permite mantener la velocidad del rotor a un valor
deseado constante y además de mantener el torque dentro de un rango
establecido. En esta primera experiencia la velocidad deseada es de 1500 RPM,
mientras que el torque irá aumentando desde los 1.7 segundos con un torque
cero hasta los 3 segundos alcanzando el torque de 15 Nm para la escalera
ascendente mientras que para la escalera descendente el torque aplicado será
de signo negativo, para que se pueda producir regeneración.
En las figuras 2-17 se muestra la potencia de entrada del sistema de
escalera con regeneración y su factor de potencia.
Figura 2-17: Gráfica de factor de potencia y potencias de entrada con
regeneración.

48
Figura 2-18: Corriente, velocidad y torque en la escalera ascendente.
En la figura 2-18 se puede apreciar la corriente en amperes, la velocidad
en RPM y el torque electromecánico en Nm del motor de la escalera ascendente.
Se puede observar que, después de haber alcanzado la velocidad
deseada de 1500 rpm la velocidad del rotor de la máquina se mantiene
inalterable, independiente del torque aplicado al eje. Justamente este es el
objetivo de la implementación de este control.
En la figura 2-19 se puede apreciar el comportamiento del flujo de
energía, desde el motor de la escalera descendente al motor de la escalera
ascendente.
En la figura 2-20 se encuentran las mismas variables anteriores pero para
el motor de la escalera descendente.
Para el funcionamiento de este motor en modo generador se mantiene
inalterable también la velocidad de giro deseada del rotor de 1500 rpm.

49
Figura 2-19: Flujo de energía con regeneración.
Figura 2-20: Corriente, velocidad y torque en la escalera descendente.
Las siguientes figuras muestran el comportamiento del sistema de
escaleras al mantener las mismas condiciones para el motor de la escalera

50
ascendente, mientras que a la máquina de la escalera descendente se cambia
su modo de generador a motor, es decir, se aplica a su eje un torque positivo.
En la figura 2-21 se observa la potencia de entrada del sistema completo
de las escaleras. Se puede apreciar que la magnitud de la potencia es
prácticamente el doble de la potencia consumida en el circuito anterior (figura 2-
17), es decir, el sistema posee 2 motores, pero la red que alimenta el circuito de
las escaleras entrega la potencia correspondiente a prácticamente un solo motor.
El ahorro de energía es considerable, solo se consume aproximadamente la
mitad de la potencia que se debería consumir para un sistema de 2 motores.
En la figura 2-22 (escalera ascendente) y 2-23 (escalera descendente) se
puede observar que las velocidades de giro de sus respectivos motores se
mantienen inalterables.
Figura 2-21:Gráfica de factor de potencia y potencias de entrada sin
regeneración.

51
Figura 2-22: Corriente, velocidad y torque en la escalera ascendente.
Figura 2-23: Corriente, velocidad y torque en la escalera descendente.

52
ChopperDe
freno
Red 3 Vac400 V50 Hz
CV+
MotorDe
inducción
CV+
MotorDe
inducciónV-
Circuito escaleraascendente
Circuito escaleradescendente
Inversortrifásico
Inversortrifásico
Va
Vb
Vc
PuenteRectificador
PuenteRectificador
V-
Energía total
Figura 2-24: Flujo de energía sin regeneración.
En la figura 2-24 se puede apreciar el flujo de la energía sin regeneración.
La red eléctrica prácticamente duplica su transmisión de energía sin
regeneración.

53
CAPITULO 3
ESTUDIO ARMÓNICO DEL SISTEMA CON CONTROL VECTORIALIMPLEMENTADO PARA LAS ESCALERAS MECÁNICAS
3.1 DESCRIPCIÓN DEL SISTEMA.
El análisis de armónicos es realizado en las corrientes y tensiones de
entrada en baja tensión (400 V) del circuito de escaleras mecánicas (PCC),
como se indica en la figura 3-1, donde los rectificadores de entrada se asumen
sin filtros.
Este análisis es realizado con el programa Matlab-simulink, y el tiempo de
simulación es de 5 segundos. En los 1.7 s, en donde el motor alcanza la
velocidad nominal, se aplica una carga al eje de forma gradual en forma rampa
hasta llegar al torque nominal de la máquina. El procedimiento de análisis será
realizado en los tiempos de 2 s, 3.5 s y 4.8 s, con una muestra de 7 ciclos, con el
objetivo de observar el comportamiento armónico en carga baja, media y alta
respectivamente.
Antes de todo se muestran en las tablas 3.1 y 3.2, las normas chilenas
adoptadas por la comisión nacional de energía, basándose en la IEEE 519-1992,
para el contenido armónico en la corriente y la tensión.
El nivel de cortocircuito asumido para el análisis armónicos, necesario
para utilizar la tabla 3.1, es de 20 Mva en el lado de baja tensión, lo que equivale
a una corriente de cortocircuito (Icc) de 28,86 KA y con una corriente de
demanda máxima de 200 (A) (IL), con lo que se obtiene una relación Icc/IL de
144,33.

54
Tabla 3.1: Norma para distorsión armónica de corrientes.
Figura 3-1: Análisis armónico para el circuito de escaleras.
55
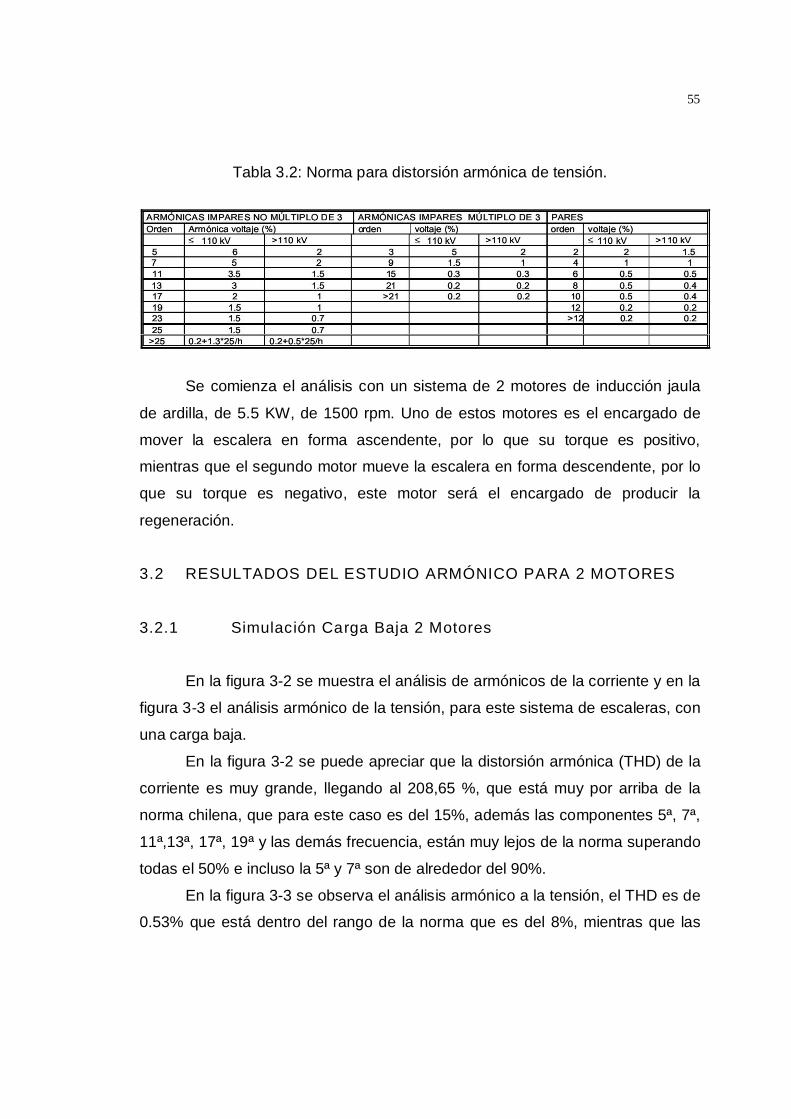
Tabla 3.2: Norma para distorsión armónica de tensión.
Se comienza el análisis con un sistema de 2 motores de inducción jaula
de ardilla, de 5.5 KW, de 1500 rpm. Uno de estos motores es el encargado de
mover la escalera en forma ascendente, por lo que su torque es positivo,
mientras que el segundo motor mueve la escalera en forma descendente, por lo
que su torque es negativo, este motor será el encargado de producir la
regeneración.
3.2 RESULTADOS DEL ESTUDIO ARMÓNICO PARA 2 MOTORES
3.2.1 Simulación Carga Baja 2 Motores
En la figura 3-2 se muestra el análisis de armónicos de la corriente y en la
figura 3-3 el análisis armónico de la tensión, para este sistema de escaleras, con
una carga baja.
En la figura 3-2 se puede apreciar que la distorsión armónica (THD) de la
corriente es muy grande, llegando al 208,65 %, que está muy por arriba de la
norma chilena, que para este caso es del 15%, además las componentes 5ª, 7ª,
11ª,13ª, 17ª, 19ª y las demás frecuencia, están muy lejos de la norma superando
todas el 50% e incluso la 5ª y 7ª son de alrededor del 90%.
En la figura 3-3 se observa el análisis armónico a la tensión, el THD es de
0.53% que está dentro del rango de la norma que es del 8%, mientras que las

56
magnitudes de las componentes armónicas son muy bajas y están dentro de la
norma.
Figura 3-2: Distorsión armónica corriente 2 motores carga baja.
Figura 3-3: Distorsión armónica tensión 2 motores carga baja.
57
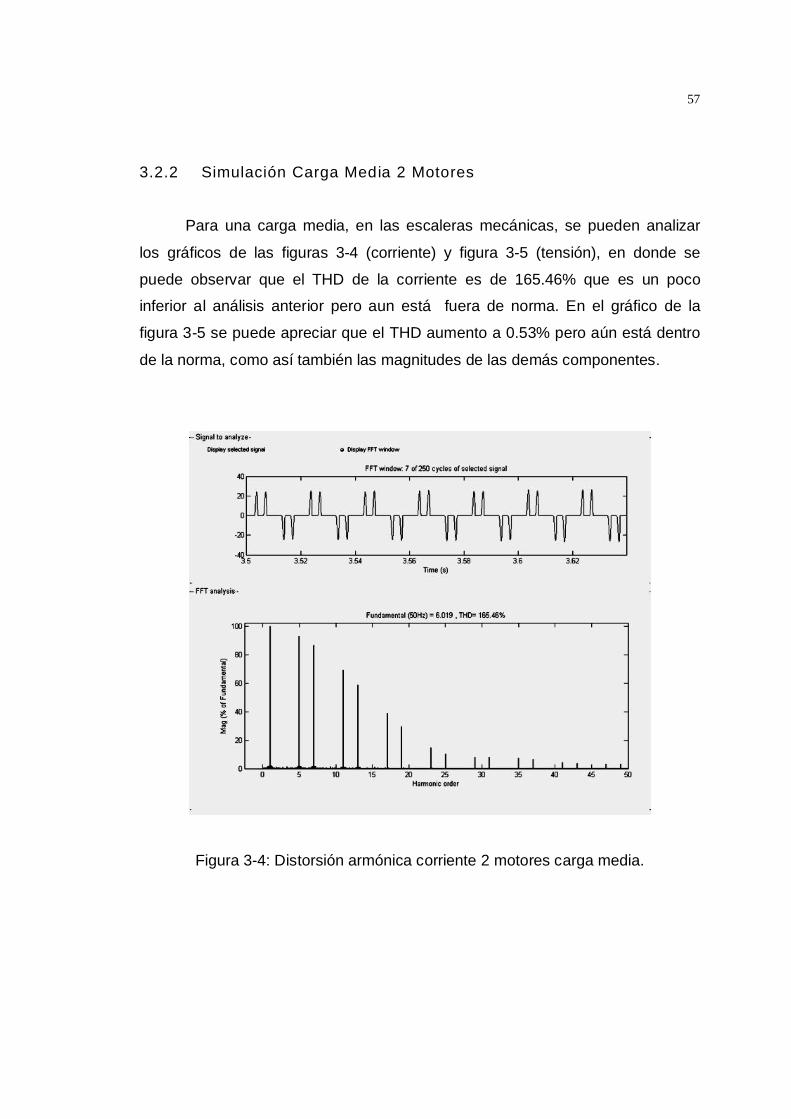
3.2.2 Simulación Carga Media 2 Motores
Para una carga media, en las escaleras mecánicas, se pueden analizar
los gráficos de las figuras 3-4 (corriente) y figura 3-5 (tensión), en donde se
puede observar que el THD de la corriente es de 165.46% que es un poco
inferior al análisis anterior pero aun está fuera de norma. En el gráfico de la
figura 3-5 se puede apreciar que el THD aumento a 0.53% pero aún está dentro
de la norma, como así también las magnitudes de las demás componentes.
Figura 3-4: Distorsión armónica corriente 2 motores carga media.
58
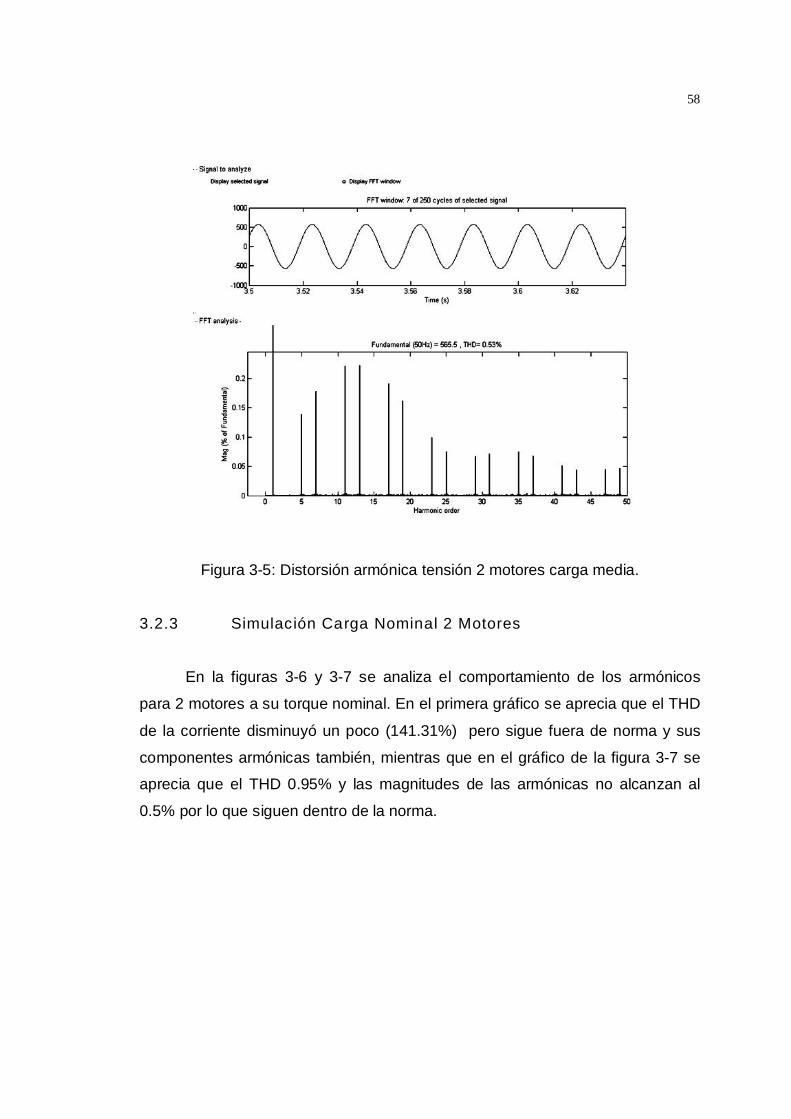
Figura 3-5: Distorsión armónica tensión 2 motores carga media.
3.2.3 Simulación Carga Nominal 2 Motores
En la figuras 3-6 y 3-7 se analiza el comportamiento de los armónicos
para 2 motores a su torque nominal. En el primera gráfico se aprecia que el THD
de la corriente disminuyó un poco (141.31%) pero sigue fuera de norma y sus
componentes armónicas también, mientras que en el gráfico de la figura 3-7 se
aprecia que el THD 0.95% y las magnitudes de las armónicas no alcanzan al
0.5% por lo que siguen dentro de la norma.

59
Figura 3-6: Distorsión armónica corriente 2 motores carga nominal.
Figura 3-7: Distorsión armónica tensión 2 motores carga nominal.

60
3.3 RESULTADOS DEL ESTUDIO ARMÓNICO PARA 8 MOTORES.
3.3.1 Simulación Carga Baja 8 Motores
Se realizó un segundo análisis de armónicos, simulando un sistema de 8
escaleras mecánicas, es decir, 4 escaleras ascendiendo y 4 descendiendo, cada
una con su motor correspondiente, descrito anteriormente. Los resultados del
análisis de armónicos de corriente y tensión que se obtuvieron para el tiempo de
2 s, simulando una carga baja, se muestran en las figuras 3-8 y 3-9
respectivamente. Se observa que el THD del análisis de la corriente es de
152,85% que es un tanto inferior al caso de 2 motores pero aun sigue muy por
sobre la norma chilena. En el gráfico de armónicos de tensión de la figura 3-9 se
aprecia que la tensión se encuentra dentro de la norma.
Figura 3-8: Distorsión armónica corriente 8 motores carga baja.

61
Figura 3-9: Distorsión armónica tensión 8 motores carga baja.
3.3.2 Simulación Carga Media 8 Motores
Para el análisis de armónicos de corriente y tensión para una carga media
de las escaleras mecánicas, nos referimos a las figuras 3-10 y 3-11, en donde la
corriente sigue con un THD demasiado grande (152.85%) claro que menor que
para el caso de 2 motores. Las magnitudes de las componentes ha disminuido
un poco en comparación con el caso de 2 máquinas, en especial desde la 11ª
componente en adelante. La tensión es analizada en el gráfico de la figura 3-11,
en donde se observa que el THD aumentó a más del doble que en el caso de 2
motores, pero aún sigue bajo norma.

62
Figura 3-10: Distorsión armónica corriente 8 motores carga media.
Figura 3-11: Distorsión armónica tensión 8 motores carga media.

63
3.3.3 Simulación Carga Nominal 8 Motores
Para la carga máxima de estos 8 motores, los resultados son apreciables
en las figuras 3-12 y 3-13. En la primera se observa que el THD de la corriente
es de 104.49%, inferior al caso de 2 máquinas, pero todavía fuera de norma.
Mientras que en el análisis de la tensión (figura 3-13) se observa que su THD es
del 2.2%, que es más del doble que para el caso de 2 motores, pero se
encuentra dentro de la norma chilena. Las magnitudes de las componentes 5ª y
7ª armónicas también aumentaron al doble del valor alcanzado en el caso
anterior.
El problema de los armónicos se soluciona con la implementación de
filtros pasa bajos, en el lado continuo del condensador, los que disminuirán la
distorsión armónica para mantenerlos bajo la norma chilena.
Figura 3-12: Distorsión armónica corriente 8 motores carga nominal.

64
Figura 3-13: Distorsión armónica tensión.

65
CAPÍTULO 4
FACTIBILIDAD TÉCNICA Y ECONÓMICA DEL SISTEMA CON CONTROLVECTORIAL EN LAS ESCALERAS MECÁNICAS.
4.1 DESCRIPCIÓN DE LOS EQUIPOS A UTILIZAR
A continuación se mostrará en detalle los distintos equipos considerados en
la evaluación económica que más adelante se realizará. Los componentes
fundamentales que deben ser instalados para equipar a una escalera
convencional con esta nueva tecnología son los enlistados a continuación:
a) 1 motor de inducción
b) 1 variador de frecuencia con control vectorial.
c) 1 reductor helicoidal índice de reducción 10.
d) 1 reactor de línea trifásico.
e) 1 encoder.
a) Motor de Inducción
Tabla 4.1: Características del motor de inducción.
Potencia 5,5 Kw
Tensión línea a línea 380 Volts
Corriente nominal 13,29 A
Nº de polos 8
RPM 750
Factor de potencia 0,85
Peso aproximado 97,4 Kg
Precio US$ 589,03

66
Figura 4-1: Motor de inducción.
El motor utilizado en este proyecto es de marca Siemens que posee las
características indicadas en la tabla 4.1, con precio de dólar de $510,84 del 5 de
agosto del 2008: El motor es mostrado en la figura 4-1
b) Variador de Frecuencia
En la figura 4-2 se puede apreciar la imagen del variador de frecuencia
GS3-47p5 de DURApulse AC Drives con control vectorial. A continuación se dan
a conocer las características principales de este dispositivo.

67
Figura 4-2: Variador de frecuencia.
- 7,5 hp- Rampa ajustable para aceleración y desaceleración.- Conexión externa con el DC link.- Freno DC.- 380-480 VAC.- Control vectorial.- Modulación PWM sinusoidal.- Tecnología IGBT.- 150% de la corriente nominal por 1 minuto.
- Control vectorial sin sensores con opción de retroalimentación con tarjetaencoder, para un mejor control.
- Frecuencia de salida desde 0,1 a 400 Hz.- Precio US$ 623,85
En el precio de este dispositivo, más adelante informado, se incluye la
tarjeta del encoder GS3-FB, que es mostrada en el diagrama de conexión
indicado en la figura 4-3.
68
Figura 4-3: Diagrama de conexión de tarjeta para encoder.
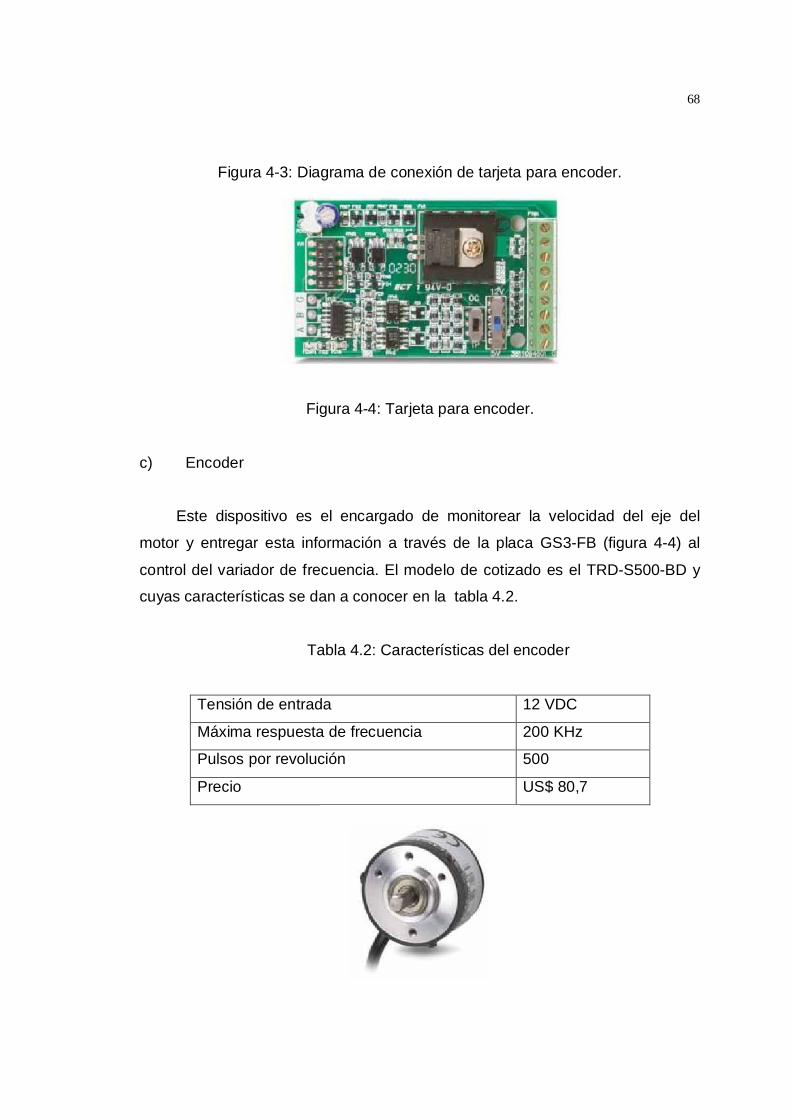
Figura 4-4: Tarjeta para encoder.
c) Encoder
Este dispositivo es el encargado de monitorear la velocidad del eje del
motor y entregar esta información a través de la placa GS3-FB (figura 4-4) al
control del variador de frecuencia. El modelo de cotizado es el TRD-S500-BD y
cuyas características se dan a conocer en la tabla 4.2.
Tabla 4.2: Características del encoder
Tensión de entrada 12 VDC
Máxima respuesta de frecuencia 200 KHz
Pulsos por revolución 500
Precio US$ 80,7

69
Figura 4-5: Encoder.
Figura 4-6: Caja de engranaje
d) Reductor Helicoidal
Esta caja de engranajes (figura 4-6) es de la línea MOTOX de Siemens y el
modelo es el Z.68-LA112MB4, cuyas características principales se muestran en
la tabla 4.3.
Tabla 4.3: Características de caja de engranaje.
Índice de reducción (i) 10
Tipo helicoidal
Torque de salida 302 Nm
Peso 69 Kg
Precio US$1.616,18
e) Reactor de Línea Trifásico
Con el objetivo de reducir los armónicos entregados por el variador de
frecuencia, y además para proteger al variador de las sobrecorrientes
producidas principalmente por el condensador, se conectan en la entrada de la

70
alimentación trifásica, en serie con el variador, un grupo de reactores de línea
trifásicos, como se muestra en la figura 4-7.
Figura 4-7: Diagrama de conexión de los reactores de línea.
4.2 TARIFAS ELÉCTRICAS.
El estudio se realizará con respecto a la tarifa que usualmente los mall
tienen contratada con la compañía de distribución eléctrica. Esta tarifa es la AT
4.3 en la cual el precio a pagar por esta cuenta incluye el consumo y la demanda
en punta y fuera de punta. En donde el período de punta en la zona urbana
centro está definida desde mayo a septiembre de las 18 a 23 hrs, en donde éste
es el período de mayor demanda.
Este precio a pagar está definido por la siguiente ecuación exceptuando
otros cobros, como arriendo de medidor y bajo factor de potencia.
71
CFKWHDEPDFPPagaraecioPr (4-1)
En donde:
DFP: Demanda fuera de punta, es el precio impuesto por la empresa
distribuidora para el consumo fuera del período antes señalado, multiplicado por
la potencia instantánea promediada en 15 minutos.
DEP: Demanda en punta, es el precio negociado con la empresa
distribuidora para el consumo dentro del período antes señalado, multiplicado
por la potencia instantánea promediada en 15 minutos.
KWH: Consumo de energía, es el precio negociado con la empresa
distribuidora, multiplicado por los kilowatts-hora.
CF: costo en pesos del cargo fijo de servicio
En la tabla 4.4 y 4.5 entregan los precios para las diferentes tarifas
ofrecidas por CONAFE y CHILQUINTA respectivamente.
Tabla 4.4: Tarifa CONAFE

72
Tabla 4.5: Tarifa CHILQUINTA
En la tabla 5.1 correspondiente a la tarifa de CONAFE, se observa que el
valor del cargo de energía es de $67,39 kw-H, mientras que en CHILQUINTA es
de $68,972 kw-H. El valor de la demanda en horario fuera de punta en CONAFE
es de $1414,70 por kw mientras que en CHILQUINTA es de $1865,786 por kw, y
finalmente el precio de la demanda dentro del horario de punta es de $6227,38
por kw en CONAFE y $6806,577 por kw en CHILQUINTA.
4.3 SIMULACIÓN 8 MOTORES
Para realizar la evaluación económica de este proyecto se procedió a
simular el comportamiento de 8 motores funcionando en modo motor (sin

73
regeneración), con esto se logrará estudiar el comportamiento de las escaleras
mecánicas convencionales. Con estos resultados se logró determinar la cantidad
de dinero que se invierte en el funcionamiento de estas escaleras en los
conceptos de energía y consumo. Los resultados obtenidos se muestran en la
tabla 4.6.
En esta tabla se indican 3 clases de cargas en el motor de la escalera
ascendente, las cuales son:
Clase 1: carga baja (entre el 10% al 40% de la carga nominal)
Clase 2: carga media (entre el 40% al 70% de la carga nominal)
Clase 3: carga alta (entre el 60% al 100% de la carga nominal)
Tabla 4.6: Demanda y consumo de 8 motores sin regeneración.
Sin regeneración
Demanda (12hrs) Consumo total Consumo hrs punta Consumo fuera hrs punta
Clase Kw-H Kw Kw Kw
1 128,18 10,68 11,87 9,88
2 148,12 12,34 14,41 10,96
3 174,16 14,51 17,17 12,74
Mientras que en la escalera descendente se aplica una carga baja, similar a
la aplicada en la clase 1.
En la tabla 4.7 se muestra el resultado de las simulaciones con las mismas
cargas anteriormente señaladas, pero con el torque de valor negativo para los
motores de las escaleras descendentes, para poder simular el comportamiento
en modo generador de este motor. La carga de la escalera descendente se
mantuvo en el rango de la clase 1, para simular el peor caso, es decir, con
menor regeneración.
Tabla 4.7: Demanda y consumo de 8 motores con regeneración.

74
Con regeneración
Demanda (12hrs) Consumo total Consumo hrs punta Consumo fuera hrs punta
Clase Kw-H Kw Kw Kw
1 63,18 5,26 5,84 4,87
2 83,13 6,92 8,38 5,95
3 109,23 9,10 11,14 7,73
Con los precios de las tarifas entregadas anteriormente se procedió a
calcular la cantidad de dinero requerido para el funcionamiento de estas
escaleras.
En la tabla 4.8 se muestra la cantidad de dinero usado para mantener las
escaleras convencionales (sin regeneración) y la cantidad de dinero necesaria
para el funcionamiento de las escaleras mecánicas con regeneración. El ahorro
obtenido mensualmente para la tarifa de CONAFE se muestra en porcentaje de
ahorro y en pesos.
Tabla 4.8: Ahorro de dinero mensual 8 motores, CONAFE.
CONAFE
Clase Con regeneración ($) Sin regeneración ($) Ahorro mensual ($) Ahorro mensual (%)
1 172880 348923 176042 50,45
2 230542 406579 176037 43,29
3 303051 478910 175859 36,72
En la tabla 4.9 se puede apreciar el monto en pesos del ahorro anualmente
y el promedio de estos montos para CONAFE, además se añade el ahorro de
dinero anual, en pesos y UF de $ 20.590,59 (5 de agosto del 2008), por cada
uno de los motores con el cual se realizará la evaluación económica de la
utilización de esta nueva tecnología en las escaleras mecánicas.
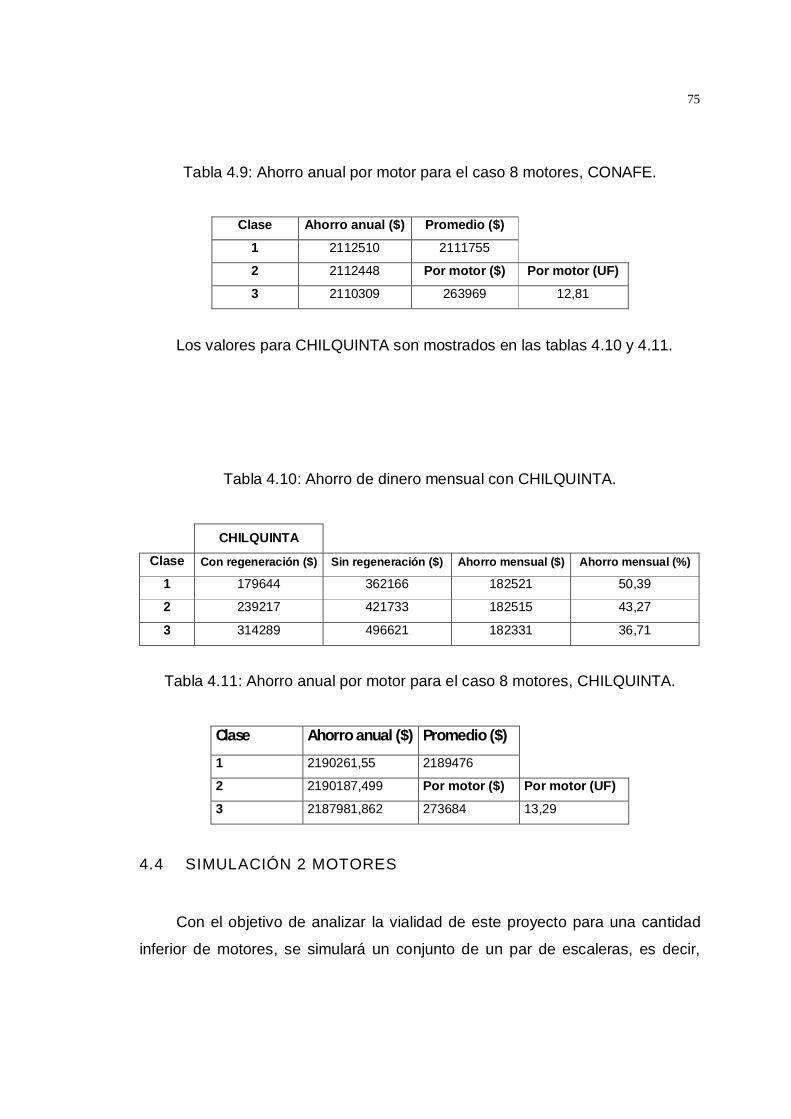
75
Tabla 4.9: Ahorro anual por motor para el caso 8 motores, CONAFE.
Clase Ahorro anual ($) Promedio ($)
1 2112510 2111755
2 2112448 Por motor ($) Por motor (UF)
3 2110309 263969 12,81
Los valores para CHILQUINTA son mostrados en las tablas 4.10 y 4.11.
Tabla 4.10: Ahorro de dinero mensual con CHILQUINTA.
CHILQUINTA
Clase Con regeneración ($) Sin regeneración ($) Ahorro mensual ($) Ahorro mensual (%)
1 179644 362166 182521 50,39
2 239217 421733 182515 43,27
3 314289 496621 182331 36,71
Tabla 4.11: Ahorro anual por motor para el caso 8 motores, CHILQUINTA.
Clase Ahorro anual ($) Promedio ($)
1 2190261,55 2189476
2 2190187,499 Por motor ($) Por motor (UF)
3 2187981,862 273684 13,29
4.4 SIMULACIÓN 2 MOTORES
Con el objetivo de analizar la vialidad de este proyecto para una cantidad
inferior de motores, se simulará un conjunto de un par de escaleras, es decir,

76
dos motores, uno para la escalera ascendente y el otro, para la escalera
descendente.
Para estas simulaciones, las cargas aplicadas también fueron determinadas
por clases al igual que para las simulaciones con 8 motores.
Clase 1: carga baja (entre el 10% al 40% de la carga nominal)
Clase 2: carga media (entre el 40% al 70% de la carga nominal)
Clase 3: carga alta (entre el 60% al 100% de la carga nominal)
Los resultados son desglosados a continuación en las siguientes tablas.
Tabla 4.12: Demanda y consumo de 2 motores sin regeneración.
Sin regeneración
Demanda (12hrs) Consumo total Consumo hrs punta Consumo fuera hrs punta
Clase Kw-H Kw Kw Kw
1 23,76 1,98 1,93 2,15
2 31,28 2,60 2,04 2,77
3 44,41 3,70 3,17 4,05
Tabla 4.13: Demanda y consumo de 2 motores con regeneración.
Con regeneración
Demanda (12hrs) Consumo total Consumo hrs punta Consumo fuera hrs punta
Clase Kw-H Kw Kw Kw
1 11,832 0,986 0,88 1,02
2 16,392 1,366 1,03 1,68
3 27,1644 2,2637 1,65 2,26
Tabla 4.14: Ahorro de dinero mensual 2 motores, CONAFE.

77
CONAFE
Clase Con regeneración ($) Sin regeneración ($) Ahorro mensual ($) Ahorro mensual (%)
1 32676 64955 32278 49,69
2 43794 81728 37934 46,41
3 70241 117120 46879 40,02
Tabla 4.15: Ahorro anual por motor para el caso 2 motores, CONAFE.
Clase Ahorro anual ($) Promedio ($)
1 387342 468368
2 455208 Por motor ($) Por motor (UF)
3 562553 234184 11,37
Tabla 4.16: Ahorro de dinero mensual 2 motores, CHILQUINTA.
CHILQUINTAClase Con regeneración ($) Sin regeneración ($) Ahorro mensual ($) Ahorro mensual (%)
1 34329 67882 33553 49,42
2 45992 85313 39320 46,08
3 73325 122117 48791 39,95
Tabla 4.17: Ahorro anual por motor para el caso 2 motores, CHILQUINTA.
Clase Ahorro anual ($) Promedio ($)
1 402639 486661
2 471847 Por motor ($) Por motor (UF)
3 585497 243330 11,81
Las tablas 4.15 y 4.17, serán las que se utilizarán para calcular la
evaluación económica la que es llevada a cabo mas adelante en éste capítulo.
4.5 FUNDAMENTOS ECONÓMICOS.

78
En los proyectos de reemplazo de equipos, tiene como finalidad
determinar la rentabilidad económica de dicho proyecto, por lo que se deben
definir algunos conceptos económicos para su mejor comprensión.
El indicador de rentabilidad utilizado para estos proyectos es el
denominado Valor Actual Neto (VAN). Para estudiar estas alternativas, se debe
fijar un horizonte común de evaluación.
La rentabilidad de un proyecto se puede medir de muchas formas
distintas, por ejemplo en unidades monetarias, tasas o porcentajes, o también en
el tiempo necesario para recuperar la inversión.
A continuación se describen las siguientes herramientas para analizar las
posibilidades y los límites de los criterios para la evaluación.
4.5.1 Valor Actualizado Neto (V.A.N.).
El VAN se define como la actualización de los flujos de costos y de
beneficios para todo el período de análisis del proyecto. Dicha actualización se
realiza actualizando la tasa de descuento privada o social, según sea pertinente,
que corresponda al costo de oportunidad del capital.
Si un proyecto de inversión tiene un VAN positivo, el proyecto es rentable.
Entre dos o más proyectos, el más rentable es el que tenga un VAN más alto. Un
VAN nulo significa una ganancia exactamente igual a la exigida, y si el VAN
resulta negativo, no estaría indicando necesariamente una pérdida, sino mas
bien, cuanto faltó para que el inversionista obtuviera la rentabilidad deseada. El
Van se define como:
n
ii
j
rj
CiBiVAN0
0
1(4-2)
En donde:
VAN = valor actualizado neto.
79
Bi = beneficios totales del proyecto, año i.Ci = costos totales del proyecto, año i.n =período de análisis del proyecto (horizonte de evaluación).rj = tasa de descuento vigente para el año i.
La principal ventaja de este método es que al homogeneizar los flujos
netos de Caja a un mismo momento de tiempo (t=0), reduce a una unidad de
medida común cantidades de dinero generadas (o aportadas) en momentos de
tiempo diferentes. Además, admite introducir en los cálculos flujos de signo
positivos y negativos (entradas y salidas) en los diferentes momentos del
horizonte temporal de la inversión, sin que por ello se distorsione el significado
del resultado final, como puede suceder con la T.I.R.
4.5.2 Tasa Interna de Rentabilidad (T.I.R)
Se denomina Tasa Interna de Rentabilidad (T.I.R.) a la tasa de descuento
que hace que el Valor Actual Neto (V.A.N.) de una inversión sea igual a cero.
(V.A.N. =0).
n
iiTIR
BniVAN0 1
0 (4-3)
En donde:
VAN = valor actual neto
Bni = beneficio neto del año i
TIR = tasa interna de retorno
Este método considera que una inversión es aconsejable si la T.I.R.
resultante es igual o superior a la tasa exigida por el inversor, y entre varias
alternativas, la más conveniente será aquella que ofrezca una T.I.R. mayor.
La T.I.R. es un indicador de rentabilidad relativa del proyecto, por lo cual
cuando se hace una comparación de tasas de rentabilidad interna de dos

80
proyectos no tiene en cuenta la posible diferencia en las dimensiones de los
mismos. Una gran inversión con una T.I.R. baja puede tener un V.A.N. superior a
un proyecto con una inversión pequeña con una T.I.R. elevada.
Cuando la T.I.R. es mayor que la tasa de interés, el rendimiento que
obtendría el inversionista realizando la inversión es mayor que el que obtendría
en la mejor inversión alternativa, por lo tanto, conviene realizar la inversión. Si la
T.I.R. es menor que la tasa de interés, el proyecto debe rechazarse. Cuando la
T.I.R. es igual a la tasa de interés, el proyecto debe rechazarse. Cuando la T.I.R.
es igual a la tasa de interés, el inversionista es indiferente entre realizar la
inversión o no.
4.5.3 Tiempo de Recuperación de La Inversión
El cálculo del períodos de amortización de la inversión, trata de conocer en
qué tiempo se recupera la inversión realizada, esto es, la comparación entre la
suma algebraica de los resultados netos obtenidos luego de la inversión inicial,
con relación a esta (todos los conceptos descontados al momento presente), lo
que indica el período durante el cual se está expuesto al riesgo del negocio.
Este método muestra un indicador que aunque aplicable para identificar la
rentabilidad sólo para el caso de un proyecto único, permite determinar en
cuanto tiempo se recupera no sólo la inversión, sino también el costo del capital
involucrado. Esta es la razón porque el TRI es el indicador utilizados para
advertir acerca del tiempo en que existe riesgo implícito por la inmovilización de
fondos que implica la inversión.
Para una correcta determinación del período de recuperación se deben
sumar los valores actuales de los ingresos netos de cada período hasta igualar
la inversión. De esta manera, si por ejemplo toda la inversión se financia con
T.I.R.>i realizar el proyectoT.I.R.<i no realizar el proyectoT.I.R.=i el inversionista es indiferente entre realizar el proyecto o no.

81
préstamo, se determinara además del tiempo que se requiere para amortizar
dicha inversión, el tiempo requerido para pagar los intereses que el préstamo
genere. La aplicación de éste método adquiere un mayor sentido cuando se
emplea complementariamente con el cálculo del VAN. En este orden, si se está
evaluando un solo proyecto, la posibilidad de recuperar la inversión en algún
momento estaría indicando de por si que el VAN es positivo.
4.5.4 Relación Beneficio/Costo (B/C)
Para la identificación de los costos y beneficios del proyecto que son
pertinentes para la evaluación, es necesario definir una situación base o
situación sin proyecto; la comparación de lo que sucede con proyecto o versus lo
que hubiera sucedido sin proyecto, definirá los costos y beneficios pertinentes
del mismo.
4.6 EVALUACIÓN ECONÓMICA DEL PROYECTO
4.6.1 Cálculo Del T.I.R
Para realizar el cálculo del T.I.R., se considerará una tasa de retorno
mínima aceptable (TRMA) es de 20%.
Esta evaluación se realizará en UF, por el motivo de que ésta unidad es
ajustada mensualmente y es dependiente del IPC, por lo que los valores pueden
ser analizados en cualquier año con solo actualizar el valor de la UF.
Tabla 4.18: Costo de los dispositivos.
Elemento Precio (US$) Monto (UF)
Motor Siemens 5.5 Kw 589,03 14,61
Reductor i=10 1.616,18 40,10

82
Variador de frecuencia 623,85 15,48
Instalación 880,9 21,85
Reactores de línea 138,63 3,44
Encoder 80,70 2
Total por escalera 3.929,29 97,48
En la tabla 6.1 se desglosa los precios del ó los dispositivos que componen
esta nueva tecnología para una escalera mecánica.
a) T.I.R. Para Simulación de 8 Motores
La condición para encontrar la TIR es que el VAN debe ser igual a 0, por lo
que la ecuación queda como:
0),,/( nTIRAPAIoVAN (4-3)
En donde:
Io es la inversión inicial en UF obtenida en la tabla 4.18 (97,48 UF).
A es el ahorro de dinero obtenida en la tabla 4.9 y 4.11, en donde:
A para CONAFE es de 12,81 UF.
A para CHILQUINTA es de 13,29 UF.
n es la cantidad de años del proyecto que para este análisis es de 10 años.
Para CONAFE:

83
Para CHILQUINTA:
Para que el proyecto cubra la inversión inicial, el TIR debe ser mayor a la
TRMA que en éste estudio es del 20%. Los resultados obtenidos, para las dos
compañías de distribución, muestran que la TIR es menor al TRMA. En los dos
casos analizados el TIR es menor al TRMA, lo que evidencia que el proyecto no
cubriría la inversión.
b) T.I.R. Para Simulación de 2 Motores
Para este cálculo la ecuación utilizada es la misma del caso anterior con 8
motores.
Lo que cambia son los valores de A los que son obtenidos de la tabla 4.15 y
4.17 anteriormente mostradas. Por lo que los valores ahora son:
Io es la inversión inicial en UF obtenida en la tabla 6.4 (97,48 UF).
A es el ahorro de dinero obtenida en la tabla 5.11 y 5.13, en donde:
A para CONAFE es de 11,37 UF.
(4.4)

84
A para CHILQUINTA es de 11,81 UF.
n es la cantidad de años del proyecto que para este análisis es de 10 años.
Para CONAFE:
Para CHILQUINTA:
La TIR es menor que la TRMA del 20%, por lo que este proyecto también
no cubre el gasto incurrido en la inversión inicial.
4.6.2 Cálculo del VAN
a) VAN Para Simulación de 8 Motores
Para el cálculo del VAN se considerará la misma TRMA y los demás
valores que para el cálculo de la TIR para 8 motores.

85
Para CONAFE:
Para CHILQUINTA:
Como se dijo anteriormente si el VAN es negativo el proyecto no es viable,
que es justamente lo que sucede en estos 2 casos analizados.
b) VAN Para Simulación de 2 Motores
Para el cálculo del VAN se considerará la misma TRMA y los demás
valores que para el cálculo de la TIR para la simulación de 2 motores.
Para CONAFE:
Para CHILQUINTA:
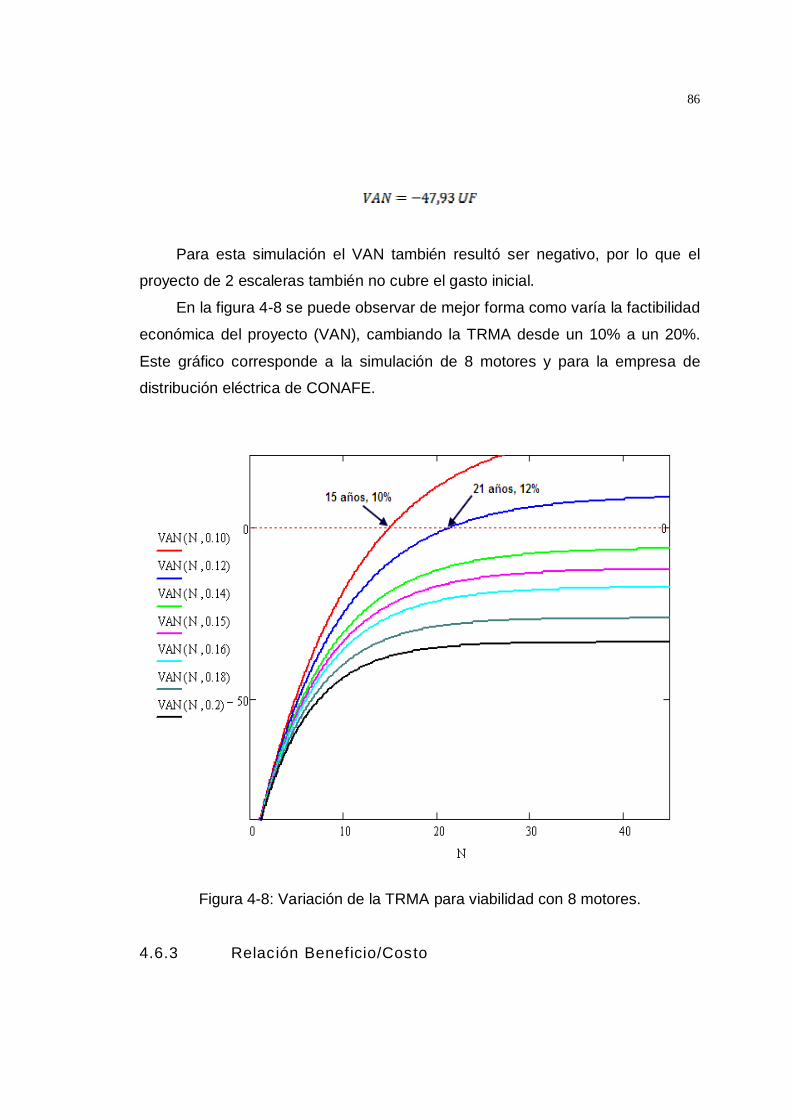
86
Para esta simulación el VAN también resultó ser negativo, por lo que el
proyecto de 2 escaleras también no cubre el gasto inicial.
En la figura 4-8 se puede observar de mejor forma como varía la factibilidad
económica del proyecto (VAN), cambiando la TRMA desde un 10% a un 20%.
Este gráfico corresponde a la simulación de 8 motores y para la empresa de
distribución eléctrica de CONAFE.
Figura 4-8: Variación de la TRMA para viabilidad con 8 motores.
4.6.3 Relación Beneficio/Costo

87
a) Beneficio/Costo Para Simulación De 8 Motores
Ahora se analizará, en las tablas 4.19 a la 4.21, lo que se ahorraría en un
sistema de 8 escaleras mecánicas con los dispositivos antes señalados. En la
primera tabla se observa el ahorro promediado anual en pesos y UF, para la
compañía distribuidora de CHILQUINTA, mientras que en la tabla 4.20 se
muestra los mismos resultados para CONAFE.
Tabla 4.19: Ahorro anual en pesos y UF para 8 escaleras, CHILQUINTA.
8 motores Chilquinta
Clase Con regeneración ($) Sin regeneración ($)
1 179.644,24 362.166,04
2 239.217,54 421.733,16
3 314.289,68 496.621,50
promedio ($) 2.932.605,84 5.122.082,81
promedio (UF) 142,42 248,76
Tabla 4.20: Ahorro anual en pesos y UF para 8 escaleras, CONAFE.
8 motores Conafe
Clase Con regeneración ($) Sin regeneración ($)
1 172.880,85 348.923,40
2 230.542,36 406.579,70
3 303.051,32 478.910,41
promedio ($) 2.825.898,14 4.937.654,07
promedio (UF) 137,24 239,80

88
Tabla 4.21: Ahorro de dinero a 10 años para 8 escaleras.
8 motores Con reg. (UF) Sin reg. (UF) Ahorro (UF) Ahorro ($)
VAN (CHILQUINTA) -682,45 -1.111,18 428,73 8.827.880,89
VAN (CONAFE) -660,72 -1.073,63 412,91 8.502.037,59
En la tabla 4.21 se muestra el ahorro de dinero correspondiente a 10 años
con una TRMA del 20%. Se puede apreciar que al cabo de estos 10 años se
ahorrarían alrededor de $8.827.880 con CHILQUINTA y $8.502.037 con
CONAFE.
En las siguientes tablas se realiza el mismo análisis anterior pero ahora
para la simulación de 2 escaleras mecánicas.
Tabla 4.22: Ahorro anual en pesos y UF para 2 escaleras, CHILQUINTA.
2 motores Chilquinta
Clase Con regeneración ($) Sin regeneración ($)
1 34.329,43353 67.882,72933
2 45.992,41123 85.313,0446
3 73.325,7202 122.117,1691
promedio ($) 614.590,2598 1.101.251,772
promedio (UF) 29,84811313 53,48325484
Tabla 4.23: Ahorro anual en pesos y UF para 2 escaleras, CONAFE.
2 motores Conafe
Clase Con regeneración ($) Sin regeneración ($)
1 32.676,98 64.955,50
2 43.794,87 81.728,91

89
3 70.241,27 117.120,74
promedio ($) 586.852,4542 1.055.220,603
promedio (UF) 28,50 51,25
En la tabla 4.24 se puede apreciar que el ahorro de dinero correspondiente
a 10 años con una TRMA del 20% para la simulación de 2 motores. Se puede
observar que al cabo de estos 10 años se ahorrarían alrededor de $1.688.874
con CHILQUINTA y $1.612.180 con CONAFE.
Tabla 4.24: Ahorro de dinero a 10 años para 2 escaleras.
2 motores Con reg. (UF) Sin reg. (UF) Ahorro (UF) Ahorro ($)
VAN (CHILQUINTA) -210,48 -292,50 82,02 1.688.874,62
VAN (CONAFE) -204,83 -283,13 78,30 1.612.180,20
90
CONCLUSIONES
Los valores de los parámetros utilizados en las simulaciones son
aproximaciones obtenidas de modelos predeterminados de simulink y de valores
típicos de catálogos.
No hay regeneración en las escaleras convencionales, se necesita una
reestructuración en el aspecto mecánico y eléctrico, mientras que la tecnología
en la actualidad puede producir una alta eficiencia en el aprovechamiento de la
energía de frenado.
Con la implementación del control vectorial, la velocidad de giro del eje del
rotor se mantiene inalterable ante la aplicación de un torque nominal poniendo fin
al inconveniente de la variación de velocidad del motor a distintas cargas.
Con la observación de los resultados de las simulaciones, se puede
concluir que la eficiencia de la energía, implementando el control vectorial, se ha
logrado satisfactoriamente.
El ahorro de dinero es muy significativo con este nuevo sistema de
escaleras, como se pudo apreciar en los distintos niveles de cargas simuladas.
El factor de potencia está un poco bajo, lo que provocaría un desembolso de
dinero por multas por reactivos.
Con respecto al análisis armónico, el puente rectificador aplicado al
inversor es una gran fuente generadora de armónicos, como se observó en este
análisis, pero se observó que la tensión está dentro de norma, mientras que la
corriente está muy alejada de conseguir estar dentro de la norma chilena,
pudiendo mejorar si se le adiciona un filtro LC en el enlace CC.
En el análisis de armónicos se pudo apreciar el THD de la tensión
aumenta junto con la cantidad de cargas conectadas, mientras que para la
corriente las componentes armónicas superiores a la 10ª componente
disminuyen cuanto mayor sea la carga conectada.

91
La evaluación económica demostró que éste proyecto no consigue cubrir
la inversión inicial en un lapso de 10 años, con una TRMA del 20%, pero con una
tasa menor al 15%, el proyecto cubriría ésta inversión.
El principal factor que produjo que éste proyecto no cubra la inversión
inicial en el corto plazo, es la gran magnitud de ésta inversión, por cada motor,
que en su mayor porcentaje está compuesto por la caja reductora, alcanzando el
47% de la inversión inicial.
Mirando desde otro punto de vista se puede concluir que el sistema
disminuiría el consumo de energía, ya que al realizar el cálculo del VAN al
sistema de escaleras mecánicas convencionales, se obtuvo un VAN más
negativo que el conseguido en las escaleras con ésta nueva tecnología.

92
BIBLIOGRAFÍA
[1] Katsuhiko Ogata, Ingeniería De Control Moderna, México, Prentice Hall, 1998.
[2] Chee-Mun Ong, Dynamic Simulations Of Electric Machinery, Purdue
university, Prentice Hall, 1998.
[3] Peter Vas, Sensorless vector and direct torque Control, Oxford New York,
Oxford University Press
[4] Domingo A. Ruiz C. Apuntes del curso: Armónicos en sistemas de baja
tensión, LEP-PUCV.
[5] Domingo A. Ruiz C. Apuntes del curso: Electrónica de potencia, LEP-PUCV.
[6] Rashid Muhammad J., Electrónica de potencia, México, Prentice Hall, 1995.
[7] Flavia Eleonora Felicioni, Simudrivers, escuela de Ingeniería Electrónica,
Universidad nacional de Rosario, 2003.
REFERENCIAS WEB:
www.mathworks.com
www.monografias .com
www.conafe.cl
www.chilquinta.cl
web2.automationdirect.com
www.siemens.com

93

A P É N D I C E A
IMPLEMENTACIÓN DEL CONTROL VECTORIALEN SIMULINK

A-1
A P É N D I C E A
IMPLEMENTACIÓN DEL CONTROL VECTORIALEN SIMULINK
En este apéndice se mostrará cómo se implemento el denominado control
vectorial en el programa simulink. Este programa permite simular una gran
cantidad de sistemas, ya sean eléctricos, mecánicos, de control, etc., además
poseen una interfaz gráfica amigable y de fácil utilización.
El la figura A-1 se puede apreciar el circuito a simular en el simulink.
Figura A-1: circuito a implementar en el simulink.

A-2
Figura A-2: Componentes en simulink.
En esta figura se pueden apreciar principalmente 8 componentes:
a) Red trifásica
b) Puente rectif icador
c) Inversor trifásico
d) Motor de inducción
e) F.O.C.(f ield oriented control)
f) Control de velocidad
En la figura A-2 se puede observar el circuito antes mencionado,
implementado en simulink, en donde se pueden diferenciar, la red trifásica
indicada con el número 1, y el sistema de escaleras indicado con el 2.

A-3
a) Red trifásica
En la figura A-3 se indica la red trifásico de 400 V y 50 Hz cuyos
parámetros se indican en la figura A-4, en donde se puede indicar la tensión (V),
el ángulo de fase de esta tensión (degrees), la frecuencia (Hz), la conexión de
esta red (internal connection), en este caso es conexión estrella aterrizada, y su
resistencia (Ohms) e inductancia (H).
Figura A-3: Red trifásica.
Figura A-4: Parámetros de la red trifásica.
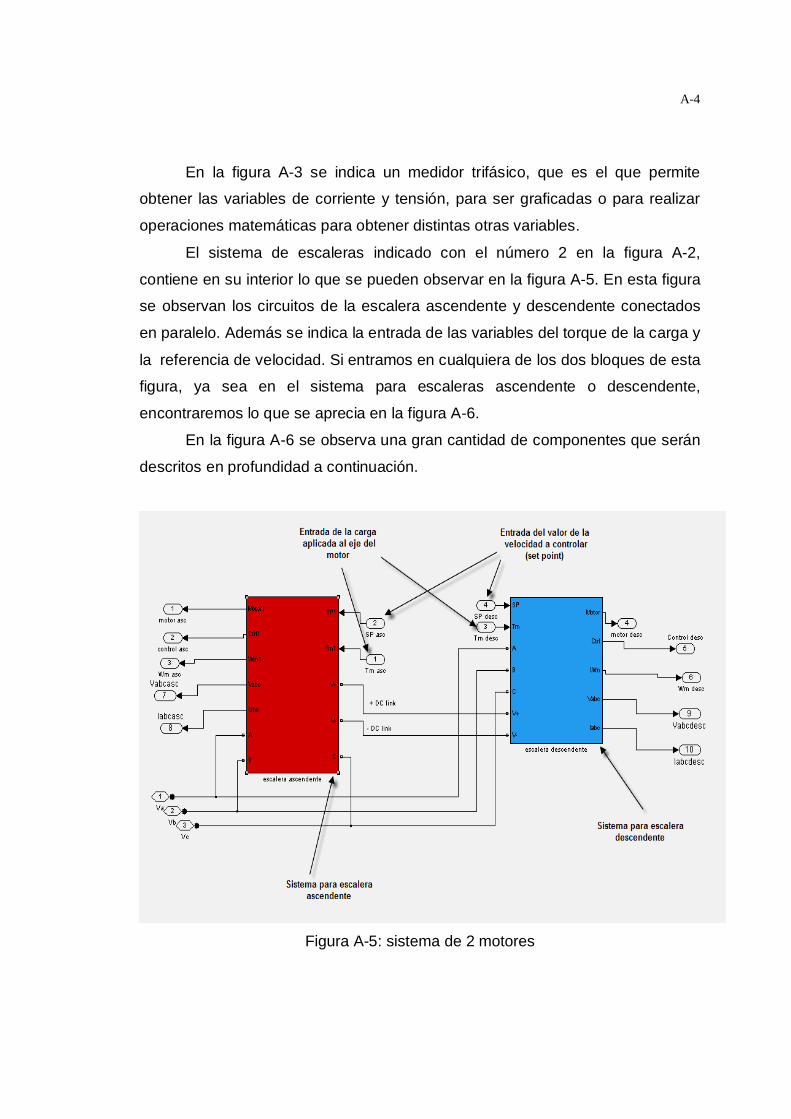
A-4
En la figura A-3 se indica un medidor trifásico, que es el que permite
obtener las variables de corriente y tensión, para ser graficadas o para realizar
operaciones matemáticas para obtener distintas otras variables.
El sistema de escaleras indicado con el número 2 en la figura A-2,
contiene en su interior lo que se pueden observar en la figura A-5. En esta figura
se observan los circuitos de la escalera ascendente y descendente conectados
en paralelo. Además se indica la entrada de las variables del torque de la carga y
la referencia de velocidad. Si entramos en cualquiera de los dos bloques de esta
figura, ya sea en el sistema para escaleras ascendente o descendente,
encontraremos lo que se aprecia en la figura A-6.
En la figura A-6 se observa una gran cantidad de componentes que serán
descritos en profundidad a continuación.
Figura A-5: sistema de 2 motores

A-5
Figura A-6: Sistema para 1 motor.
b) Puente rectif icador
Es el indicado en la figura A-6 y sus parámetros principales son descritos
en la figura A-7. Para este dispositivo se pueden definir, si se quiere un puente
trifásico, bifásico o monofásico (number of bridge arms), la resistencia (Rs) y la
capacitancia (Cs) de la malla snubber, se puede indicar el tipo de dispositivo a
utilizar en este puente (power electronic device), puede ser diodos, IGBT,
Mosfet, etc.,, en este caso se usaron diodos, se define además la resistencia
(Ron) e inductancia (Lon) de funcionamiento o encendido, y la tensión en el
diodo (Vf) cuando éste está conduciendo. Además tiene incorporado un medidor
(measurement) que permite obtener la corriente o tensión en cada uno de sus
componentes.

A-6
Figura A-7: Parámetros del puente rectificador
c) Inversor trifásico
Figura A-8: Parámetros para el inversor trifásico

A-7
Figura A-9: Parámetros para el motor de inducción.
Para este dispositivo se puede definir su número de fases (number of
bridge arms), las magnitudes de los componentes snubber (Rs y Cs) , además
se puede elegir una gran variedad de combinaciones de dispositivos (power
electronic device) que formarán el inversor, en este caso se eligió los que esos
dispositivos fueran IGBT y diodo. Se define también la tensión de estos
dispositivos al estar conduciendo (Vf), y el tiempo de caída (Tf(s)) y de subida
(Tt(s)) del IGBT, y por último posee un medidor (measurement) que permite
obtener las corrientes o tensiones en cada uno de sus componentes.
d) Motor de Inducción
Para el motor de inducción se definen principalmente las variables de
potencia nominal del motor (Pn(VA)), la tensión nominal línea a línea (Vn(Vrms))

A-8
y la frecuencia (fn(Hz)) y además los parámetros del circuito equivalente del
motor, referidos al estator (Rs, Lls, Rr’, Llr’, Lm), y su parámetros de inercia de
esta máquina (j(Kgm^2)) el factor de fricción (F(Mms)) y los pares de polos (p()).
e) F.O.C.(f ield oriented control)
En la figura A-10 se aprecia el interior del bloque denominado en la figura
A-6 “control de campo orientado”. Cuyos bloques ya fueron explicados en el
capítulo 2 del presente escrito. En la figura a-11 se encuentra el bloque de
parámetros en donde se puede observar que se utilizan las mismas variables de
la máquina de inducción, pero además de estos valores se necesitan los
especificados en la tabla A:1.
Figura A-10: Control por campo orientado

A-9
Tabla A.1: Especificaciones para el F.O.C.
Parámetro nombre valorfreq_max (Hz) Frecuencia máxima del inversor 20000in_flux (Wb) Flujo inicial de la maquina 0.2
H (A) Banda de histéresis para la corriente 5Kpflux Ganancia proporcional (control PI del flujo) 100Kiflux Ganancia integral (control PI del flujo) 350
fcflux (Hz) Frecuencia de corte para el control del flujo 10csatflux (Wb) Control de salida para la saturación del flujo [-1,1]
Tvect (s) Vector de Control para el tiempo de muestreo 20e-6
Figura A-11: Parámetros para el F.O.C.

A-10
f) Control de velocidad
En la figura A-12 se puede apreciar los bloques utilizados para construir el
control de velocidad. Este control fue descrito en el capítulo 2 de este informe.
Sus parámetros utilizados para la simulación, son los indicados en la figura A-13,
mientras que los valores de estos parámetros son mostrados en la tabla A.2.
Figura A-12: Control de velocidad
Tabla A.2: especificaciones del control de velocidad.
Parámetro Nombre Valorramp (rpm/s) Rampa de referencia de velocidad [-900,900]
kpspeed Ganancia proporcional (PI velocidad) 1kispeed Ganancia integral (PI velocidad) 200
fcspeed (Hz) Frecuencia de corte (control velocidad)ctrl_sat_torque (N.m) Saturación para el torque de salida [-1200,1200]
nf (Wb) Flujo nominal de la maquina 0.2Tsc (s) Tiempo de muestreo del controlador 2e-006

A-11
Figura A-13: Bloque de parámetros para el control de velocidad.

A P É N D I C E B
GRÁFICOS DE POTENCIAS

B-1
A P É N D I C E B
GRÁFICAS DE POTENCIAS
A continuación se mostraran los gráficos obtenidos para las simulaciones
necesarias para el análisis económico y técnico, realizado en el capítulo 4.
B.1 SIMULACIÓN 8 MOTORES
B.1.1 Simulación 8 Motores Sin Regeneración.
Figura B-1: 8 motores sin regeneración carga baja.

B-2
Figura B-2: 8 motores sin regeneración carga media.
Figura B-3: 8 motores sin regeneración carga alta.

B-3
B.1.2 Simulación 8 Motores con Regeneración.
Figura B-4: 8 motores con regeneración carga baja.
Figura B-5: 8 motores con regeneración carga media.

B-4
Figura B-6: 8 motores con regeneración carga alta.
B.2 SIMULACIÓN 2 MOTORES
B.2.1 Simulación 2 Motores Sin Regeneración
Figura B-7: 2 motores sin regeneración carga baja
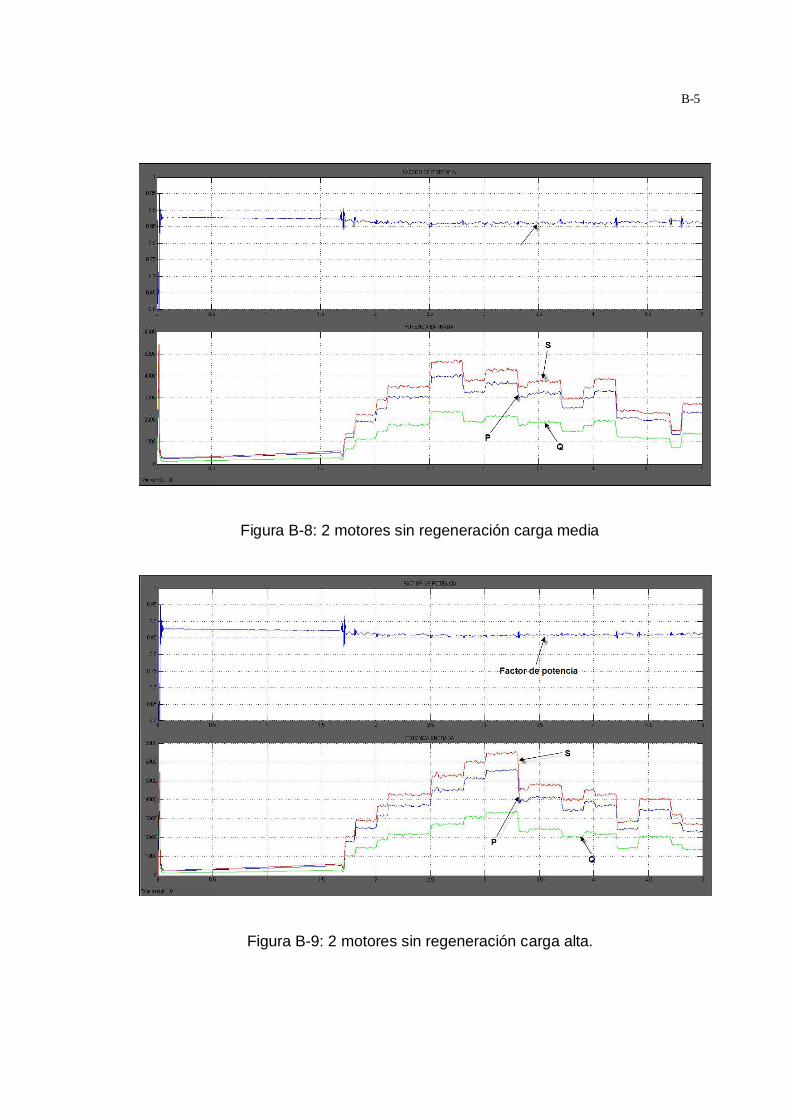
B-5
Figura B-8: 2 motores sin regeneración carga media
Figura B-9: 2 motores sin regeneración carga alta.
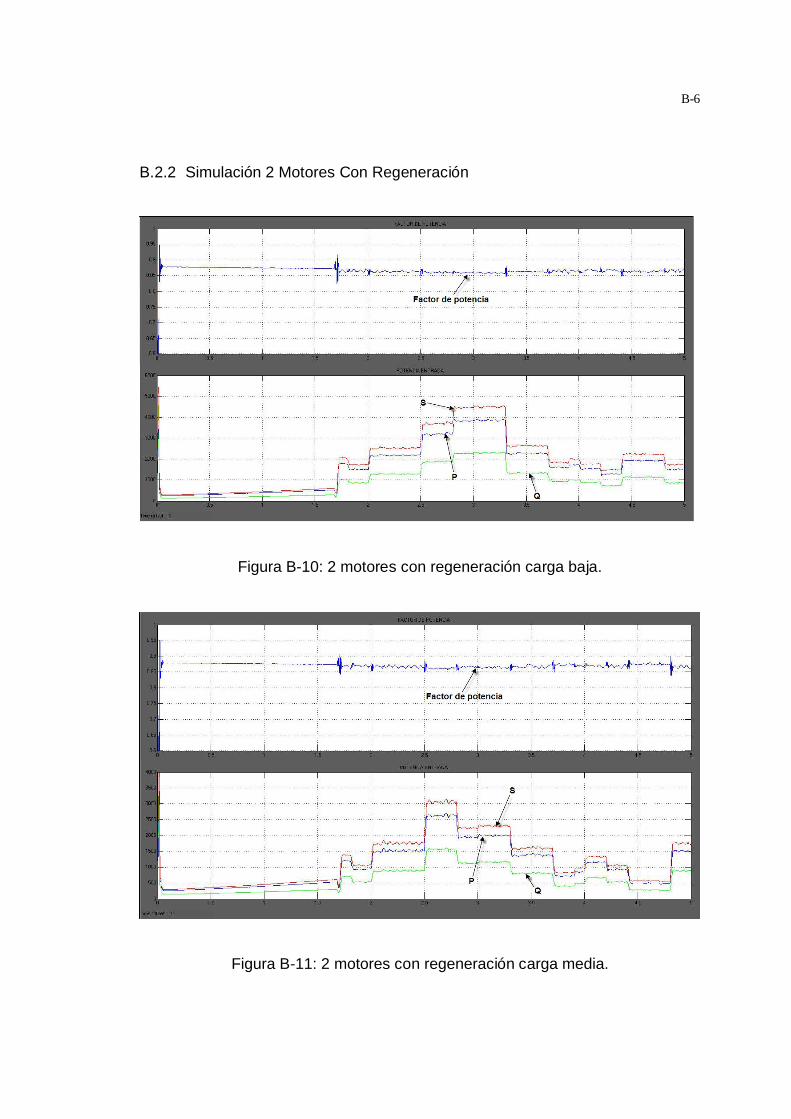
B-6
B.2.2 Simulación 2 Motores Con Regeneración
Figura B-10: 2 motores con regeneración carga baja.
Figura B-11: 2 motores con regeneración carga media.

B-7
Figura B-12: 2 motores con regeneración carga alta.