plenoptic camera technology dissertation - zee khattak
TRANSCRIPT
1
Dissertation Title:
Plenoptic Camera Technology:
Spatial-‐Angular Resolution Capture
Written by: Zee Khattak
Student number: S08424889
BSc (Hons) Film Production & Technology
Project Supervisors: Jeremy Foss, Andy White
April 2015
Zee Khattak ii
ABSTRACT
This report investigates the technology of plenoptic cameras, which in addition to
capturing 2D spatial resolution of a scene; characteristic of conventional
photography cameras, captures 4D light field depth resolution. Additional depth
resolution capture increases the photographer’s post-production capabilities,
including the ability to refocus the image. The main problem affecting the
widespread adoption of end-user plenoptic light field cameras is defined: the
spatial-angular trade-off that is intrinsic to using microlens arrays for 4D capture;
limiting final output viewing resolutions. The overall aim is to explore the extent of
these resolution limitations in relation to end-users, and to discern the
significance of this for companies developing or investing in plenoptic technology
for the future.
The plenoptic camera Lytro Illum is investigated for its ability to capture depth
information to consistent, optimal resolutions for the camera’s system; examined
through a series of sharpness resolution tests in an image test lab, within a
measured depth-scene. Additionally, the extent of resolution differences between
the Lytro Illum and a conventional Canon D60 DSLR camera using RAW
photography mode is demonstrated through optimal image quality chart testing.
The main findings indicate that an error in the calibration of the Lytro Illum lens
caused significant irregularity to its depth resolution capture at variable focal
lengths and optimal focus distances. This emphasised the intricate relationship of
the microlens array-tuning to the aperture and sensor for accurate computation in
the light field camera, and the importance for this to be properly calibrated. In
addition it is found that the light field camera predictably underperformed in
comparison with the DSLR, but not as significantly as was projected. It is
surmised that such performance limitations are a major detraction for current and
potential users, and that companies looking to invest in plenoptic camera
technology should be wary of this issue.
Zee Khattak iii
ACKNOWLEDGEMENTS
My appreciation in researching this project and developing a testing scheme
goes towards my project supervisors at Birmingham City University:
Jeremy Foss - Senior Lecturer
Andy White - Senior Lecturer
Additional praise for goes towards individuals at Birmingham City University:
Jay Patel - Senior Lecturer
Robert McLaughlin – Lecturer
Michael Bickerton - Lecturer
Anthony Lewis - Senior Academic
Thanks are given towards the individuals and companies:
Bruce Devlin - Chief Media Scientist at Dalet Digital Media Systems, for
providing me first-hand knowledge of light field imaging from a modern media
company perspective.
Imatest LLC for allowing me to use their image testing software Imatest Master
during my studies.
Hireacamera for providing me with first-rate service in hiring the Lytro Illum
camera.
Finally, thanks are given to the individuals at Millennium point and Parkside
(Birmingham City University): The Media Centre Hires & Loans and the Parkside
staff for providing me with necessary testing equipment and studio space.
Zee Khattak iv
1 Table of Contents
GLOSSARY ............................................................................................................................... VII
1 INTRODUCTION .................................................................................................................. 1 1.1 PROBLEM DEFINITION .................................................................................................................. 1 1.2 SCOPE ............................................................................................................................................... 3 1.3 RATIONALE ..................................................................................................................................... 3 1.4 OVERALL AIM & OBJECTIVES ...................................................................................................... 3
2 REVIEW OF EXISTING KNOWLEDGE ........................................................................... 5 2.1 THE DEVELOPMENT OF INTEGRAL PHOTOGRAPHY AND PLENOPTIC CAMERAS ................ 5 2.2 LYTRO PLENOPTIC CAMERAS ...................................................................................................... 6 2.3 ADOBE PLENOPTIC CAMERAS & DIFFRACTION LIMITING ..................................................... 9 2.4 RAW DSLR VS. LIGHT FIELD WORKFLOW COMPARISON ................................................... 11 2.5 IMAGE RESOLUTION TESTS: SHARPNESS ................................................................................ 13 2.6 LITERATURE REVIEW .................................................................................................................. 14 2.6.1 Digital Light Field Technology – Dissertation (Ng, 2006) ................................ 14 2.6.2 ‘Lytro, Light Fields, and The Future of Photography’ – Filmed Lecture
(Tellman, 2003) ................................................................................................................................... 14 2.6.3 Spatio-‐Angular Resolution Tradeoff in Integral Photography – Journal
Article (Georgeiv et al., 2006) ....................................................................................................... 15 2.6.4 Improving Resolution and Depth-‐of-‐Field of Light Field Cameras Using a
Hybrid Imaging System – Report (Boominathan et al., 2014) ....................................... 16 2.6.5 Lytro's Light Field Tech Is Amazing, But Is It Already Obsolete? -‐ Web
Article (Hession, 2014) ..................................................................................................................... 16 2.6.6 ‘RAW Workflow from Capture to Archives’ – Book (Andrews et al., 2006) 17 2.6.7 Three-‐Dimensional Television, Video, and Display Technologies – Book
(Javidi & Okano, 2002) ..................................................................................................................... 17
3 METHODOLOGY .............................................................................................................. 18 3.1 PRIMARY RESEARCH EXPERIMENTS ......................................................................................... 18 3.2 HYPOTHESIS .................................................................................................................................. 18 3.3 PROCEDURE ................................................................................................................................... 20 3.3.1 Equipment .............................................................................................................................. 20 3.3.2 Setting Up ............................................................................................................................... 21 3.3.3 Tests 1 ...................................................................................................................................... 22
Zee Khattak v
3.3.4 Test 2 ........................................................................................................................................ 22 3.3.5 Test 3 ........................................................................................................................................ 22 3.3.6 Test 4 ........................................................................................................................................ 23 3.3.7 Analysing Results Procedure .......................................................................................... 23
3.4 LIMITATIONS ................................................................................................................................. 25 3.5 SOLUTIONS/ IMPROVEMENTS: PRELIMINARY TESTING ....................................................... 25 3.5.1 Preliminary Test 1 – Constant Focus, Variable Distance ................................... 26 3.5.2 Preliminary Test 2 – Changing Focus, Constant Distance ................................. 27
3.6 FINAL LIMITATIONS OF TESTING PROCEDURE & IMPROVEMENTS .................................... 28 3.7 ALTERNATIVE APPROACHES ...................................................................................................... 29
4 RESULTS ............................................................................................................................ 31 4.1 TABLES ........................................................................................................................................... 31 4.1.1 Test 1 ........................................................................................................................................ 31 4.1.2 Test 2 ........................................................................................................................................ 31 4.1.3 Test 3 ........................................................................................................................................ 32 4.1.4 Test 4 ........................................................................................................................................ 32
4.2 GRAPHS .......................................................................................................................................... 33 4.2.1 Test 1 ........................................................................................................................................ 33 4.2.2 Test 1 Ideal Performances: ............................................................................................. 33 4.2.3 Test 2: ....................................................................................................................................... 34 4.2.4 Test 2 Ideal Performances: ............................................................................................. 34 4.2.5 Test 3: ....................................................................................................................................... 35 4.2.6 Test 3 Ideal Performances: ............................................................................................. 35 4.2.7 Test 4: ....................................................................................................................................... 36
4.3 DEPTH SCENE CHARTS: .............................................................................................................. 36 4.3.1 Test 1 Focal Length 30mm ............................................................................................. 36 4.3.2 Test 2 Focal Length 50mm ............................................................................................. 37 4.3.3 Test 3 Focal Length 80mm ............................................................................................. 37
5 DISCUSSION ...................................................................................................................... 38 5.1 INTERPRETING THE RESULTS .................................................................................................... 38 5.1.1 Test 1 ........................................................................................................................................ 38 5.1.2 Test 2 ........................................................................................................................................ 39 5.1.3 Test 3 ........................................................................................................................................ 42 5.1.4 Test 4 ........................................................................................................................................ 43
Zee Khattak vi
5.2 CONSENSUS & EXPLANATION OF RESULTS ............................................................................. 43
6 CONCLUSIONS .................................................................................................................. 46 6.1 OVERALL FINDINGS ..................................................................................................................... 46 6.2 REFLECTION .................................................................................................................................. 46
7 RECOMMENDATIONS FOR FURTHER WORK ......................................................... 48
8 REFERENCES .................................................................................................................... 49
9 BIBLIOGRAPHY ............................................................................................................... 53
10 APPENDICES .................................................................................................................. 56 10.1 BRUCE DEVLIN FULL INTERVIEW -‐ 10-‐04-‐15 ................................................................... 56 10.2 IMAGE TEST LAB PHOTOGRAPHS ........................................................................................... 59 10.3 DISSERTATION LOG BOOK ....................................................................................................... 60 10.4 PERSONAL IN-‐FIELD PHOTOGRAPHY USING THE LYTRO ILLUM ...................................... 63 10.5 LIGHT FIELD IMAGE UPLOAD & STORAGE ............................................................................ 64
Zee Khattak vii
GLOSSARY 3D-ready image - An image that provides the visual perception of depth once
viewed through an appropriate medium such as 3D glasses.
Aperture – The measurement that defines the size of the opening of a lens, which
allows light to pass into the main camera.
Airy disk – The central point within the rings of a diffraction pattern (see
diffraction limiting); the width in relation to the system’s pixel size determines the
hypothetical maximum resolution for a camera.
CCD/CMOS – Two camera image sensor types: charge-coupled devices (CCD)
and complementary metal-oxide-semiconductor (CMOS); used to convert light
energy into electrical charges for digital image capture.
Chroma value – The colour information of an image.
Chromatic aberration – A problem that occurs when the camera lens focuses
colours to different convergence points; causing blurriness and/or colour fringing
and a loss of overall resolution.
Computational photography – Digital image capture that instead of using
conventional optical processes, uses digital calculation for processing images.
Depth look-up table – In plenoptic cameras, used for processing depth
information; like a colour-look-up table (CLUT), which converts input colours into
new colours.
Depth map – In plenoptic/ light field images, the part the image that stores
information relating to the varying distances of surfaces of a scene.
Depth-of-field – Describes the distances between in-focus near and far objects of
a scene.
Diffraction limiting – The limited resolution output of a camera system due to
diffracted light passing through the aperture opening, causing interference of light
rays travelling at different distances; phasing occurs, producing a diffraction
pattern with peaking intensities of added/subtracted light (see airy disk).
Zee Khattak viii
Discrete Cosine Transform (DCT) – Involved in lossy compression of files;
discards information according to a sum of cosine functions.
DSLR camera – Digital single-lens-reflex camera; makes use of a mirror that
sends the image to the viewfinder or image sensor.
Dynamic range – The ratio between the largest and smallest intensity of the
image luminance signal (see luma value).
F-stop/ number – The lens ratio of the focal length (see focal length) to the
diameter of the aperture (see aperture).
Focal length – The distance between the optical centre of the camera lens to its
sensor, when the lens is focused to infinity (see infinity focus).
Holography – Relating to holograms: 3D displayed images of encoded light fields
without the use of 3D glasses.
Human visual acuity – The range of clearness of human vision.
Infinity focus (INF) – The camera is focused on a theoretical infinite distance; light
rays entering the lens appear as parallel rather then diverging rays: the maximum
possible focusing distance of the camera.
ISO – A measurement of the variable sensitivity capability of the camera’s sensor
to light.
Lens calibration – The way a camera lens is tuned to its optical system.
Light ray – A theoretical model of light, representing the direction of light wave
travel.
Luma value – The brightness information of an image.
Macro range – Extreme close-up distances in photography, making the size of
the subject in the image much greater then it is in real-life.
Megapixel – A graphic resolution reading equalling 1 million pixels (see pixel).
Metadata – Image data that is used to describe and manage other data within
image files, including information on focal length and aperture size that is unique
to the image.
Zee Khattak ix
Photosite – A single light-sensitive point on a camera sensor that becomes
charged as light hits it (see CCD/CMOS), providing single pixel information on
light and colour intensity (see pixel).
Pixel – A single point within a graphically displayed image, arranged in rows/
columns to make up the final image.
Refocusable range – The distance in which plenoptic cameras can render in-
focus images with varying depth-of-fields (see depth-of-field).
Shutter speed – The length of time the camera’s shutter is open to allow light to
pass through the aperture (see aperture).
Texture mapping – 3D-rendered image data for depth perception in images.
User/ Industry technology workflow – The sequence of tasks necessary to
complete a technological process.
White balance – The balancing of colour temperature in photographs in order for
whites to appear naturally white, due to varying light temperature conditions in
scenes.

Zee Khattak 1
1 INTRODUCTION
1.1 Problem Definition
‘Inspired by the natural diversity of perceptual systems and fuelled by advances
of digital camera technology, computational processing, and optical fabrication,
image processing has begun to transcend limitations of film- based analogue
photography.’ (Wetzstein, Ihrke, Lanman, & Heidrich, 2011, p. 1)
Modern advances in sensor resolution technology have far outgrown the
restriction on spatial output resolutions of cameras imposed by diffraction limiting
(Pereira, 2011). Within the field of computational photography however lies
plenoptic camera technology, which not only captures spatial information of a
scene, but also depth information; a means of making use of modern sensor
capabilities in excess of 100 megapixels (Lukac, 2010), (Salesin & Georgiev,
2011). Mostly associated with the commercial camera manufacturers Lytro, the
industrial application cameras Raytrix, and to a lesser degree the computer
software company Adobe Systems, plenoptic cameras offer the user greater
control over their images in post with the ability to adjust the distance-of-focus,
depth-of-field, and to a certain extent the angle-of-view of the photograph
(Wetzstein et al., 2011).
Despite being an area quite unheard of today, this technology relates back to
integral imaging: first proposed around 100 years ago by the physicist Gabriel
Lippmann (Adelson & Bergen, 1991). The purpose of this project is to understand
the slow development of this technology by investigating its main problem: the
output resolution limitations of the images (Lukac, 2010), in order to determine
what might be its future within digital imaging.
(Continued)
Zee Khattak 2
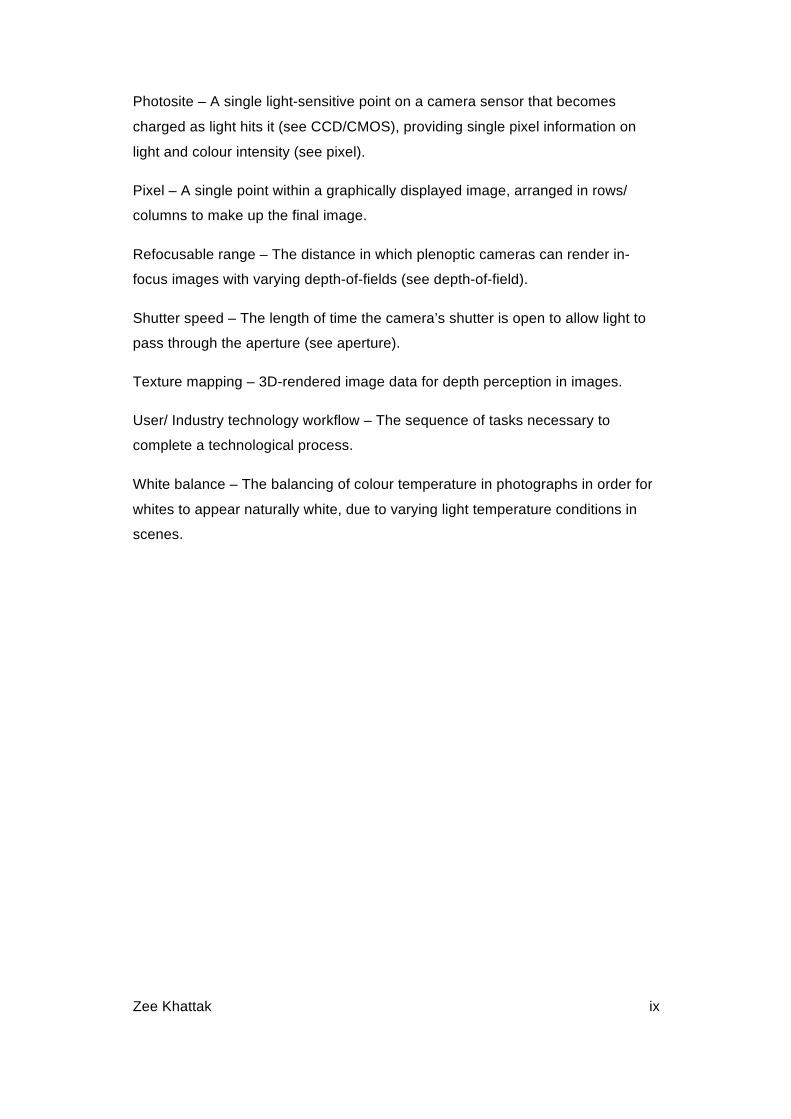
Plenoptic cameras make use of thousands of microlenses set in front of the
sensor’s photosites, separating the light to record the angular information of each
light ray; the full representation of the light field (Theobalt, Koch, & Kolb, 2013). A
light field is a 4-D representation of the scene: 2 dimensions in the spatial
domain, and 2 dimensions in the angular domain; the orientation of the light ray
(Salesin & Georgiev, 2011). Instead of capturing 1 ray per pixel, multiple different
rays are captured for each pixel, and texture mapping is used to resolve these
images into a single scene (Lumsdaine, 2012). The angular resolution in
cameras however has an inverse relationship to the spatial resolution (fig. 1-1); a
single microlens covers a 9 X 9 photosite group, which ultimately represents 1
pixel in the final rendered image (Boominathan, Mitra, & Veeraraghavan, 2014).
As seen in fig. 1-1, if plenoptic cameras were to use a similar 11-megapixel
sensor that would be found in a common DSLR, the resolution trade-off would
cause the final outputted image to be 0.1-megapixels. By comparison, a DSLR
doesn’t record any angular information, and therefore the full range of resolution
can be acquired from each image: the original 11-megapixels (Weston & Coe,
2013).
Although the new release of the Lytro Illum saw flattened light field images equal
to ~4.0 megapixels (Crisp, 2014), the continued limited spatial resolution in
comparison with conventional digital cameras continues to detract potential end-
users (Hession, 2014). The downside to not recording angular resolution
information however is argued by Lytro’s founder Ren Ng in his 2006 dissertation
on the benefits of what he coined 'light field photography', including the persistent
problems of reliable focusing in modern DSLR photography (Ng, 2006). However,
it is the spatial-angular trade-off that makes Lytro’s light field images less then
Figure 1-1 – The spatial-angular trade-off
inherent in plenoptic and DSLR photography
(Boominathan et al., 2014).
Zee Khattak 3
desirable to a modern photographer’s standards that has so far hindered the
progress of plenoptic photography (Perwaß, Wietzke, & Gmbh, 2012).
1.2 Scope
This project centres specifically on the lens performance differences of the
plenoptic camera and the DSLR camera; covering the differences between the
spatial resolutions of the light field camera Lytro Illum and the DSLR camera
Canon D60 through sharpness resolution chart testing. Additionally the depth
resolution of the Lytro Illum is examined through sharpness testing, determining
the consistency of resolution between the refocusable ranges.
Not within the scope of this project are other areas affecting the final output of
image resolution between the two cameras: from computational vs. conventional
optical processing, to megaray vs. conventional CCD/CMOS sensor application.
1.3 Rationale
This project provides a useful examination for potential investors and end-users
of plenoptic camera technology to decide whether this technology would benefit
their current industry/ user workflows, and to judge how plenoptic cameras
compare to modern DSLR photography.
1.4 Overall Aim & Objectives
To investigate the spatial-angular resolution trade-off problem of plenoptic
photography and the extent this affects final output resolutions in relation to end-
users, and to determine the significance this may have for future widespread use
from the perspective of companies aiming to invest in light field technology.
• To provide a brief discussion about the history of integral imaging and its
relation to contemporary light field capturing technology; from the first
proposal by Grabriel Lippmann in 1908 (France) to the founding of the
plenoptic camera manufacturers Lytro by Ren Ng in 2006 (America), and
the development of Adobe plenoptic cameras.
• To determine the difference between the digital capture workflows of the
Lytro Illum by comparing RAW DSLR photography workflows.
• To investigate the angular resolution consistency of the Lytro Illum
against ideal depth scene guides provided by the Lytro Company, and the
in-camera focus range guide by performing resolution tests using the ISO
Zee Khattak 4
12233 chart within a controlled image test lab, analysing the results with
image quality software Imatest.
• To analyse the spatial-angular trade-off of plenoptic and DSLR
photography by testing the Lytro Illum against the Canon D60 within a
measured depth-scene, using the ISO 12233 chart for cross-comparison
using image quality software Imatest.
• To discuss the findings in relation to the spatial-angular resolution debate
concerning plenoptic and DSLR cameras from the perspective of end-
user and industry workflows, comparing the extent of differences between
the two.
• To conclude on the relative merits or hindrances that may affect plenoptic
cameras from becoming a well-established field within photography in the
future; considering possible advances in hybrid DSLR and light field
capturing devices, light field video, or replacement by other depth-
capturing hardware/software.
(Continued)
Zee Khattak 5
2 REVIEW OF EXISTING KNOWLEDGE
2.1 The Development of Integral Photography and Plenoptic Cameras
Key terms: Integral Photography; Gabriel Lippmann; Integral Imaging.
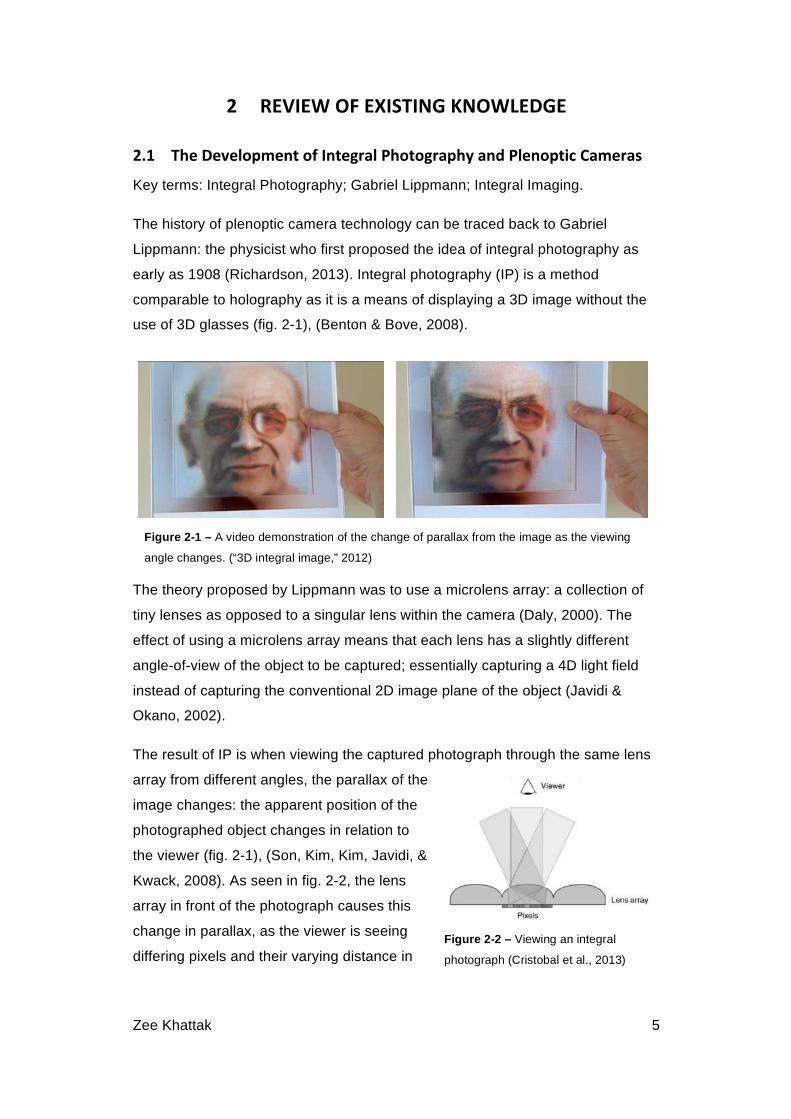
The history of plenoptic camera technology can be traced back to Gabriel
Lippmann: the physicist who first proposed the idea of integral photography as
early as 1908 (Richardson, 2013). Integral photography (IP) is a method
comparable to holography as it is a means of displaying a 3D image without the
use of 3D glasses (fig. 2-1), (Benton & Bove, 2008).
The theory proposed by Lippmann was to use a microlens array: a collection of
tiny lenses as opposed to a singular lens within the camera (Daly, 2000). The
effect of using a microlens array means that each lens has a slightly different
angle-of-view of the object to be captured; essentially capturing a 4D light field
instead of capturing the conventional 2D image plane of the object (Javidi &
Okano, 2002).
The result of IP is when viewing the captured photograph through the same lens
array from different angles, the parallax of the
image changes: the apparent position of the
photographed object changes in relation to
the viewer (fig. 2-1), (Son, Kim, Kim, Javidi, &
Kwack, 2008). As seen in fig. 2-2, the lens
array in front of the photograph causes this
change in parallax, as the viewer is seeing
differing pixels and their varying distance in
Figure 2-1 – A video demonstration of the change of parallax from the image as the viewing
angle changes. (“3D integral image,” 2012)
Figure 2-2 – Viewing an integral
photograph (Cristobal et al., 2013)
Zee Khattak 6
relation to each other, as the viewing angle changes according to the viewer’s
position (Cristobal, Schelkens, & Thienpont, 2013).
The method of IP can be replicated by taking multiple 2D pictures of the same
scene, and processing these varying angles into a singular image, which can
then be viewed through a microlens array to the same effect (Cristobal et al.,
2013). This is the modern equivalent of integral photography named integral
imaging (II): a now digital-based scheme of using software to combine 2D images
into 3D-ready images (Lueder, 2011). Due to the viewer not requiring any viewing
glasses, the IP/ II method is still considered as one of the ideal 3D viewing
systems, however it comes with numerous drawbacks (Javidi & Okano, 2002).
The major drawback as discussed in the introduction to this project is the loss of
resolution: a repeating occurrence in developing technologies that have applied II
technology, as the method of using a microlens array in front of the image
creates a spatial distortion of the image, which will always degrade its original
resolution (Poon, 2006). This is a problem which cannot be reversed, as
developers must choose between increasing the 2D resolution of the image by
miniaturising the lens arrays further, or increasing the 3D spatial resolution by
increasing the size of the lenses; both degrade the other (Georgeiv et al., 2006).
2.2 Lytro Plenoptic Cameras
Key terms: Light field camera; plenoptic camera; 4D light field.
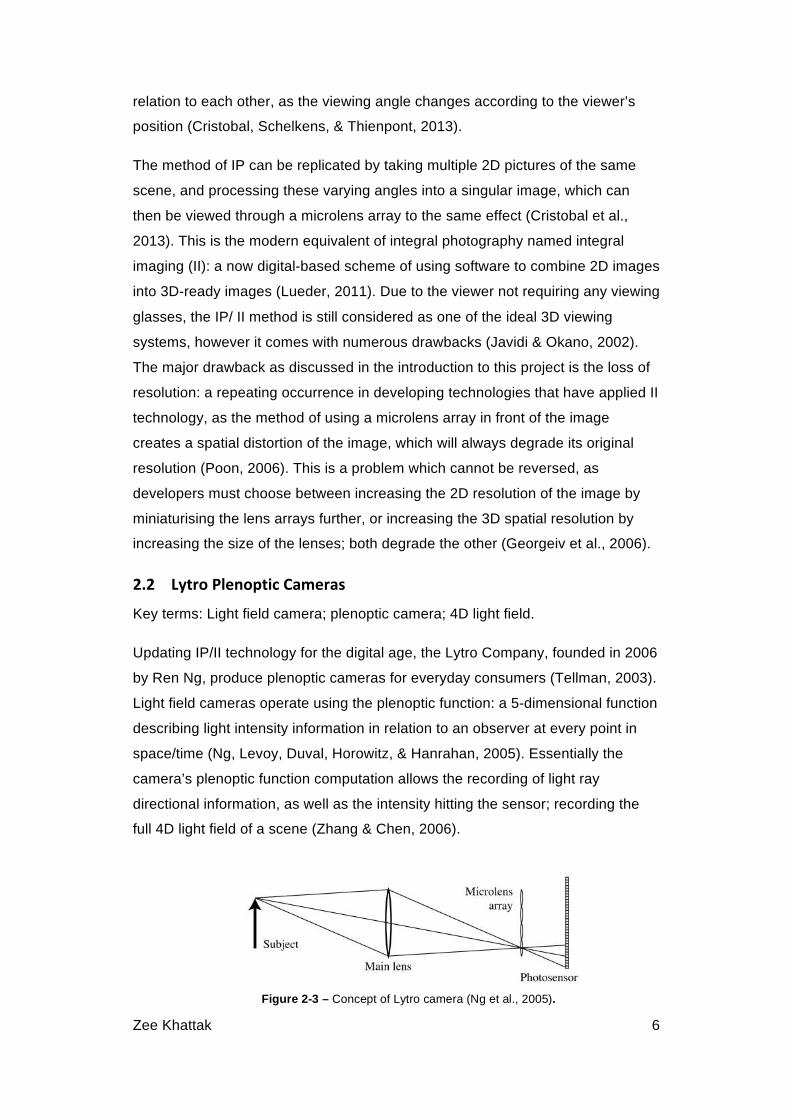
Updating IP/II technology for the digital age, the Lytro Company, founded in 2006
by Ren Ng, produce plenoptic cameras for everyday consumers (Tellman, 2003).
Light field cameras operate using the plenoptic function: a 5-dimensional function
describing light intensity information in relation to an observer at every point in
space/time (Ng, Levoy, Duval, Horowitz, & Hanrahan, 2005). Essentially the
camera’s plenoptic function computation allows the recording of light ray
directional information, as well as the intensity hitting the sensor; recording the
full 4D light field of a scene (Zhang & Chen, 2006).
Figure 2-3 – Concept of Lytro camera (Ng et al., 2005).
Zee Khattak 7
Similar to IP/II, the camera makes use of a microlens, this time set in front of a
main lens that is used to focus the image onto the microlens array (fig. 2-3)
(Fatahalian, 2011). As see in fig. 2-3, the microlens array scatters the light over
several photosites, capturing different angles-of-view for a single pixel
(Boominathan et al., 2014), (Ng et al., 2005). This setup ensures the function of
the camera is very similar to a normal DSLR, with a single sensor to capture light
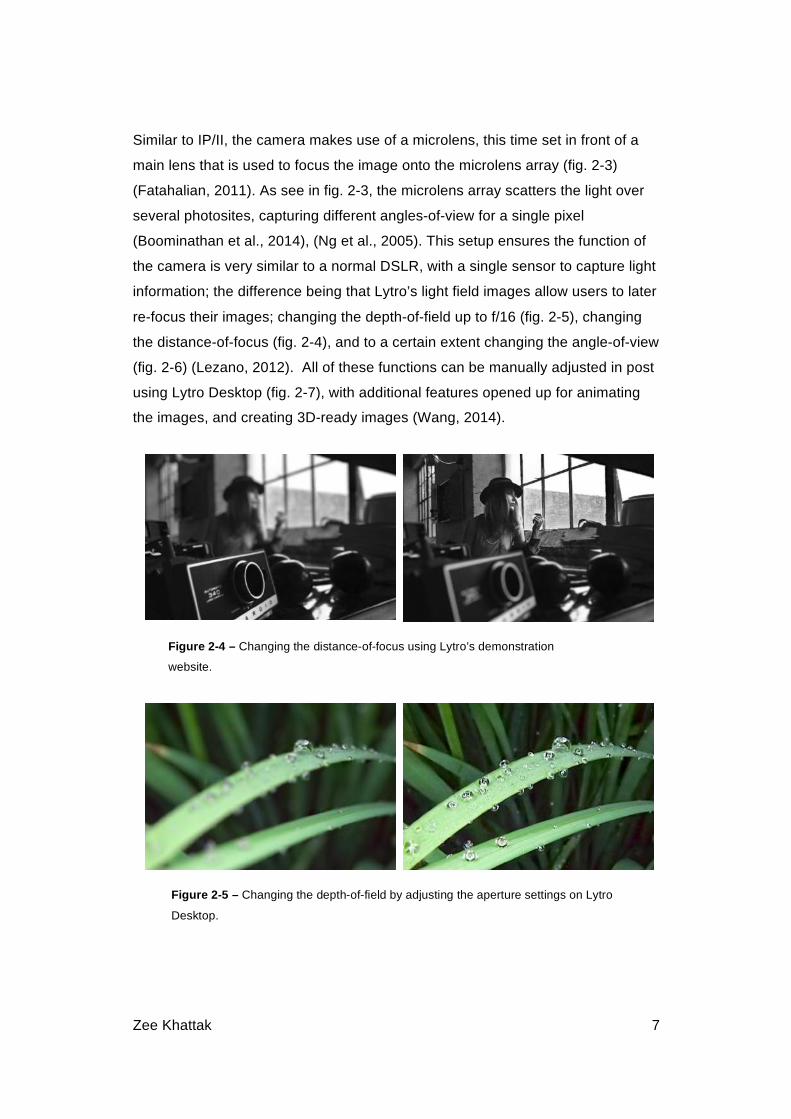
information; the difference being that Lytro’s light field images allow users to later
re-focus their images; changing the depth-of-field up to f/16 (fig. 2-5), changing
the distance-of-focus (fig. 2-4), and to a certain extent changing the angle-of-view
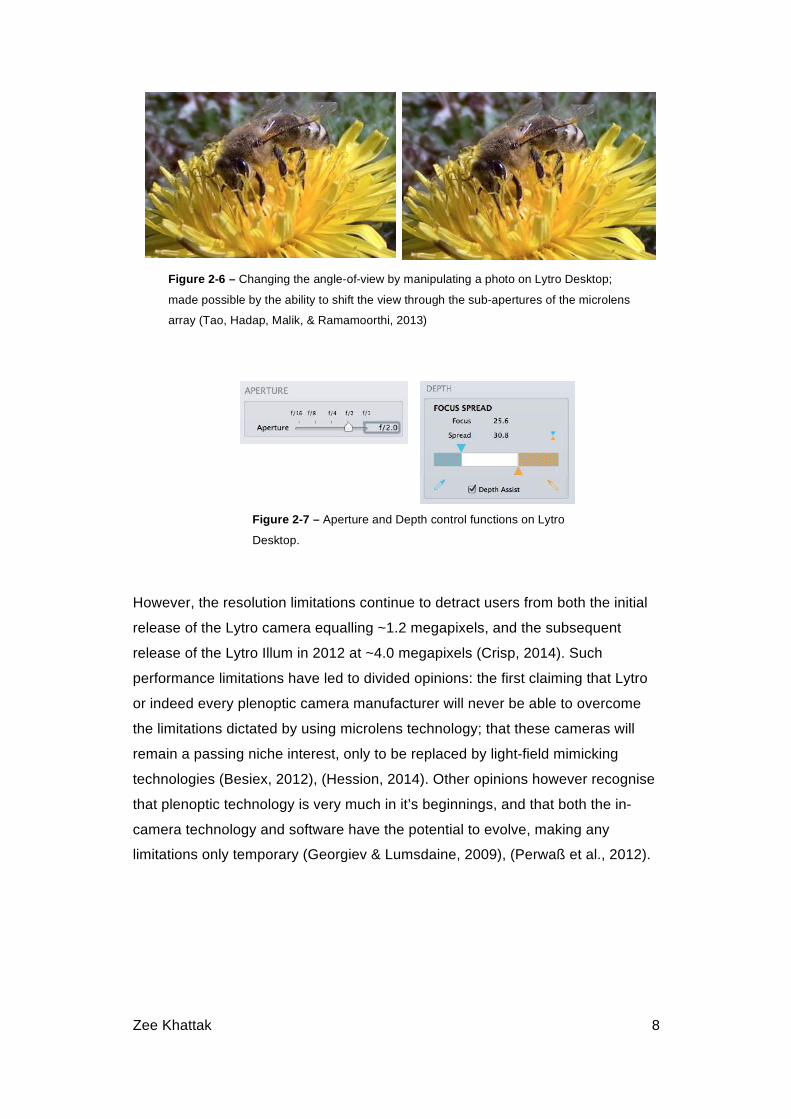
(fig. 2-6) (Lezano, 2012). All of these functions can be manually adjusted in post
using Lytro Desktop (fig. 2-7), with additional features opened up for animating
the images, and creating 3D-ready images (Wang, 2014).
Figure 2-4 – Changing the distance-of-focus using Lytro’s demonstration
website.
Figure 2-5 – Changing the depth-of-field by adjusting the aperture settings on Lytro
Desktop.
Zee Khattak 8
However, the resolution limitations continue to detract users from both the initial
release of the Lytro camera equalling ~1.2 megapixels, and the subsequent
release of the Lytro Illum in 2012 at ~4.0 megapixels (Crisp, 2014). Such
performance limitations have led to divided opinions: the first claiming that Lytro
or indeed every plenoptic camera manufacturer will never be able to overcome
the limitations dictated by using microlens technology; that these cameras will
remain a passing niche interest, only to be replaced by light-field mimicking
technologies (Besiex, 2012), (Hession, 2014). Other opinions however recognise
that plenoptic technology is very much in it’s beginnings, and that both the in-
camera technology and software have the potential to evolve, making any
limitations only temporary (Georgiev & Lumsdaine, 2009), (Perwaß et al., 2012).
Figure 2-6 – Changing the angle-of-view by manipulating a photo on Lytro Desktop;
made possible by the ability to shift the view through the sub-apertures of the microlens
array (Tao, Hadap, Malik, & Ramamoorthi, 2013)
Figure 2-7 – Aperture and Depth control functions on Lytro
Desktop.
Zee Khattak 9
2.3 Adobe Plenoptic Cameras & Diffraction Limiting
Key terms: Adobe; plenoptic cameras; plenoptic photography; diffraction limiting.
Modern photography resolution has far outgrown most screen’s capabilities to
display such large information; often manufacturers will limit cameras to ~11.0
megapixels, as anything more would be in excess of human visual acuity (Hirsch,
2013), (Ng, 2006). However, Adobe’s development of plenoptic cameras use
over 100 megapixel sensors with similar microlens arrays to Lytro, with a
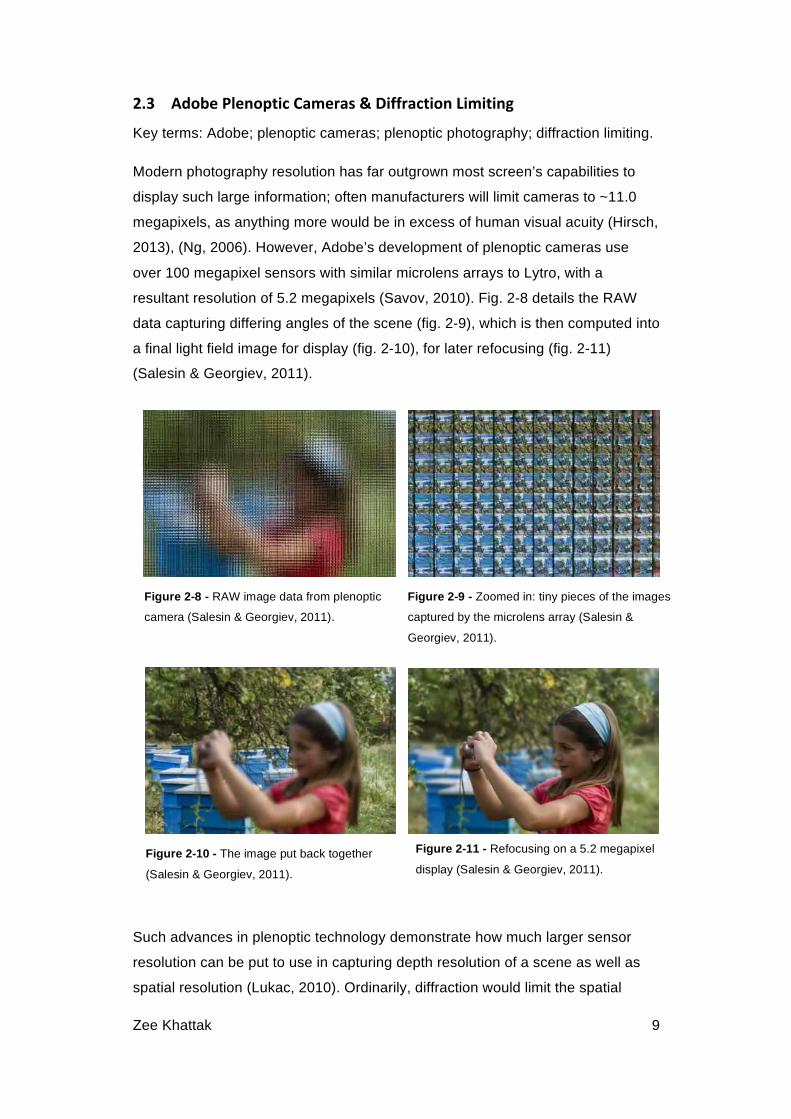
resultant resolution of 5.2 megapixels (Savov, 2010). Fig. 2-8 details the RAW
data capturing differing angles of the scene (fig. 2-9), which is then computed into
a final light field image for display (fig. 2-10), for later refocusing (fig. 2-11)
(Salesin & Georgiev, 2011).
Such advances in plenoptic technology demonstrate how much larger sensor
resolution can be put to use in capturing depth resolution of a scene as well as
spatial resolution (Lukac, 2010). Ordinarily, diffraction would limit the spatial
Figure 2-8 - RAW image data from plenoptic
camera (Salesin & Georgiev, 2011). Figure 2-9 - Zoomed in: tiny pieces of the images
captured by the microlens array (Salesin &
Georgiev, 2011).
Figure 2-10 - The image put back together
(Salesin & Georgiev, 2011).
Figure 2-11 - Refocusing on a 5.2 megapixel
display (Salesin & Georgiev, 2011).
Zee Khattak 10
resolution output of conventional digital cameras, no matter how large the
megapixel capability is of the sensor (Goldstein, 2009). Diffraction in cameras
occurs due to light dispersing when passing the camera’s aperture opening (Allen
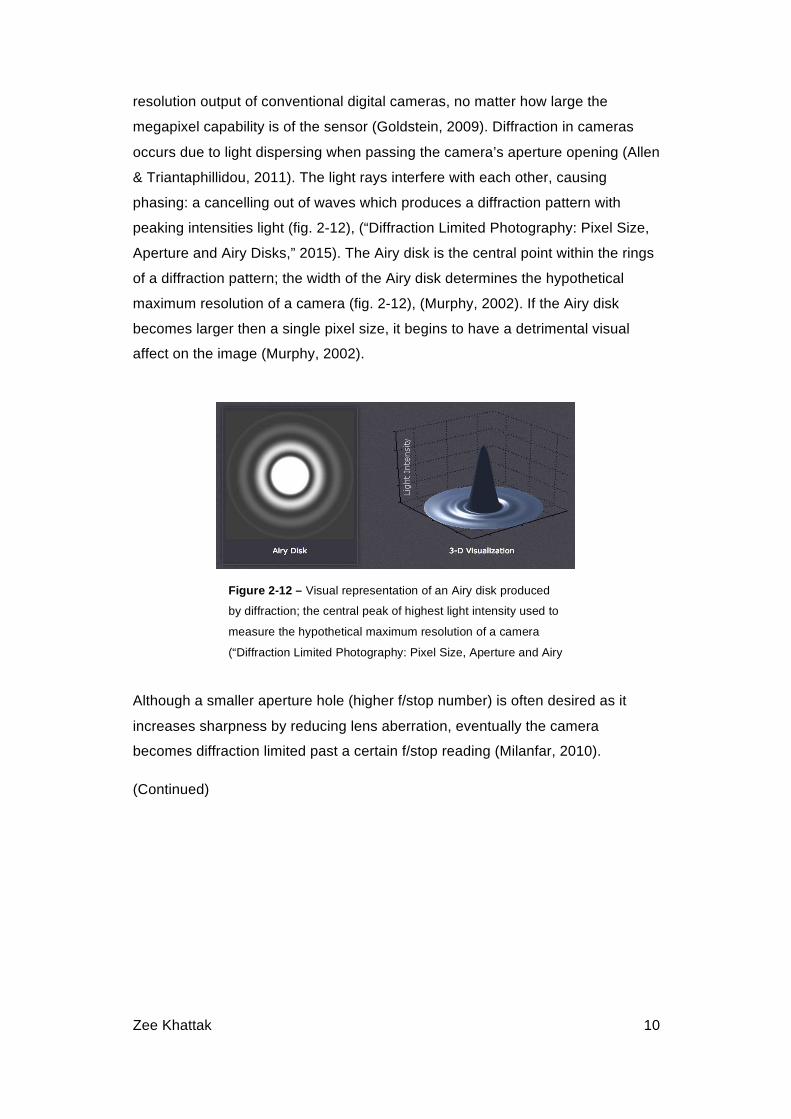
& Triantaphillidou, 2011). The light rays interfere with each other, causing
phasing: a cancelling out of waves which produces a diffraction pattern with
peaking intensities light (fig. 2-12), (“Diffraction Limited Photography: Pixel Size,
Aperture and Airy Disks,” 2015). The Airy disk is the central point within the rings
of a diffraction pattern; the width of the Airy disk determines the hypothetical
maximum resolution of a camera (fig. 2-12), (Murphy, 2002). If the Airy disk
becomes larger then a single pixel size, it begins to have a detrimental visual
affect on the image (Murphy, 2002).
Although a smaller aperture hole (higher f/stop number) is often desired as it
increases sharpness by reducing lens aberration, eventually the camera
becomes diffraction limited past a certain f/stop reading (Milanfar, 2010).
(Continued)
Figure 2-12 – Visual representation of an Airy disk produced
by diffraction; the central peak of highest light intensity used to
measure the hypothetical maximum resolution of a camera
(“Diffraction Limited Photography: Pixel Size, Aperture and Airy
Disks,” 2015)
Zee Khattak 11
2.4 RAW DSLR vs. Light Field Workflow Comparison
Key terms: RAW image workflow; Bayer filter array; CCD/CMOS devices.
The most common DSLR workflow for professional photographers is the RAW
workflow (Andrews, Butler, Butler, & Farace,
2006). In order for digital files to acquire the
brightness information of a scene, light sensitive
photosites are charged via CCD or CMOS
devices proportionately to the amount of light
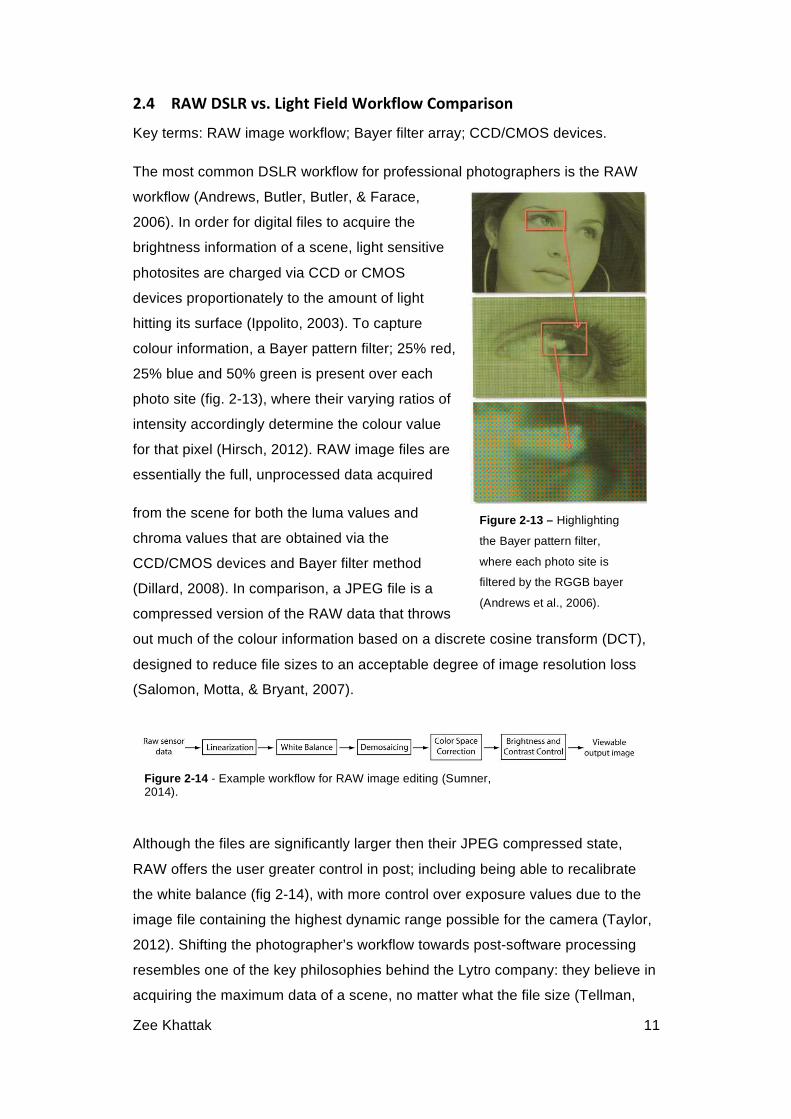
hitting its surface (Ippolito, 2003). To capture
colour information, a Bayer pattern filter; 25% red,
25% blue and 50% green is present over each
photo site (fig. 2-13), where their varying ratios of
intensity accordingly determine the colour value
for that pixel (Hirsch, 2012). RAW image files are
essentially the full, unprocessed data acquired
from the scene for both the luma values and
chroma values that are obtained via the
CCD/CMOS devices and Bayer filter method
(Dillard, 2008). In comparison, a JPEG file is a
compressed version of the RAW data that throws
out much of the colour information based on a discrete cosine transform (DCT),
designed to reduce file sizes to an acceptable degree of image resolution loss
(Salomon, Motta, & Bryant, 2007).
Although the files are significantly larger then their JPEG compressed state,
RAW offers the user greater control in post; including being able to recalibrate
the white balance (fig 2-14), with more control over exposure values due to the
image file containing the highest dynamic range possible for the camera (Taylor,
2012). Shifting the photographer’s workflow towards post-software processing
resembles one of the key philosophies behind the Lytro company: they believe in
acquiring the maximum data of a scene, no matter what the file size (Tellman,
Figure 2-13 – Highlighting
the Bayer pattern filter,
where each photo site is
filtered by the RGGB bayer
(Andrews et al., 2006).
Figure 2-14 - Example workflow for RAW image editing (Sumner, 2014).
Zee Khattak 12
2003). Lytro cameras use similar Bayer filters to capture colour information,
however additional depth information is stored in the form of a depth map and
depth look-up table within the light field (LF) image file (Patel, 2012).
Depth-of-field (DOF) would usually be controlled by changing the aperture size
on a conventional camera, however Lytro cameras have fixed f/2 apertures; due
to the complexity of computational photography, each microlens must be tuned to
the aperture opening itself: the size must be fixed as a result (Tellman, 2003).
Having a fixed wide aperture effectively eliminates the problem of diffraction
limiting at high f-stops (Lee, 2014), while allowing the user to later adjust the
aperture setting from f/1 to f/16 within Lytro Desktop (Anon, 2014). This also
enables the user to shoot at higher shutter speeds and requires lower ISO
settings compared to conventional cameras using high f-stops (Lee, 2014); Lytro
cameras instead require the user to change the focus distance or focal length of
the camera to affect DOF (Anon, 2014). This encourages photographers to think
about the composition of their photos in an unconventional way in order to
capture effective ‘living pictures’; pictures with high depth characteristics
including foreground, mid and background subjects (Northrup, 2015). The
camera also features an ‘instant’ shutter: it doesn’t require focusing motors, so
effectively reduces the delay when the image is captured after pressing the
shutter button (Wang, 2014).
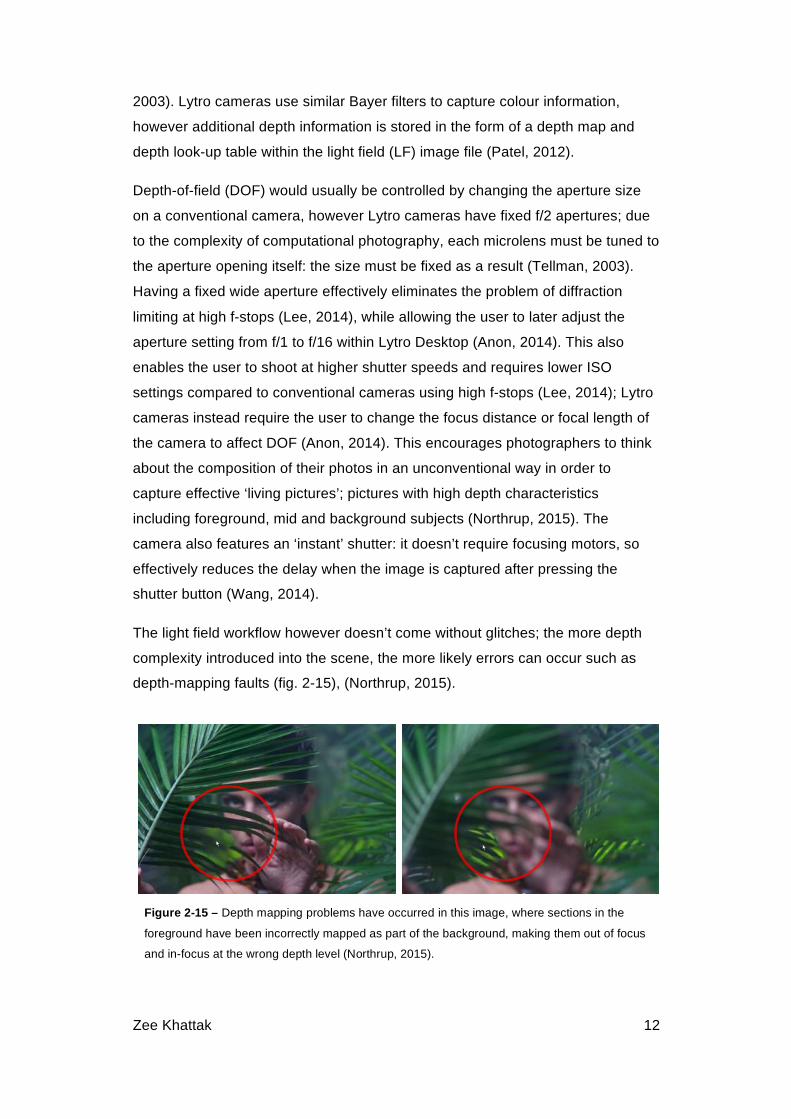
The light field workflow however doesn’t come without glitches; the more depth
complexity introduced into the scene, the more likely errors can occur such as
depth-mapping faults (fig. 2-15), (Northrup, 2015).
Figure 2-15 – Depth mapping problems have occurred in this image, where sections in the
foreground have been incorrectly mapped as part of the background, making them out of focus
and in-focus at the wrong depth level (Northrup, 2015).
Zee Khattak 13
These problems can be amended, however they add further complexity in the
light field editing workflow, requiring additional software such as Photoshop, and
only after exporting in a compatible image format such as TIFF (Jarabo,
Bousseau, Pellacini, & Gutierrez, 2012).
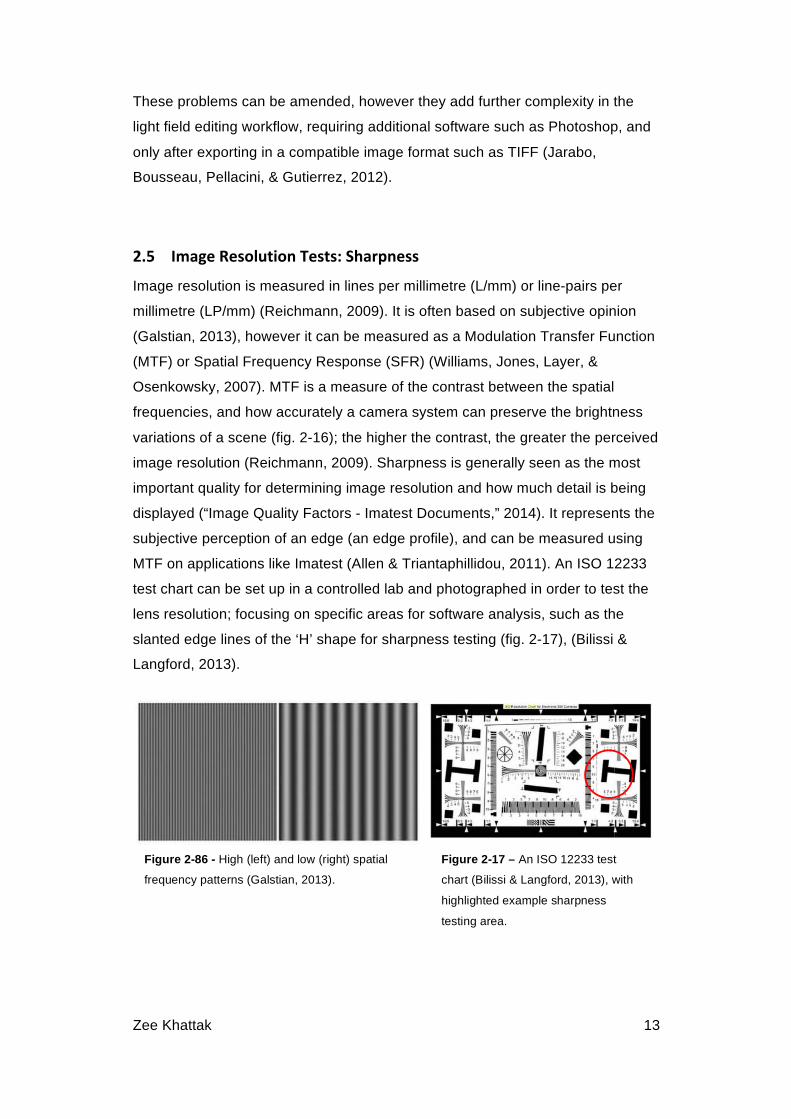
2.5 Image Resolution Tests: Sharpness
Image resolution is measured in lines per millimetre (L/mm) or line-pairs per
millimetre (LP/mm) (Reichmann, 2009). It is often based on subjective opinion
(Galstian, 2013), however it can be measured as a Modulation Transfer Function
(MTF) or Spatial Frequency Response (SFR) (Williams, Jones, Layer, &
Osenkowsky, 2007). MTF is a measure of the contrast between the spatial
frequencies, and how accurately a camera system can preserve the brightness
variations of a scene (fig. 2-16); the higher the contrast, the greater the perceived
image resolution (Reichmann, 2009). Sharpness is generally seen as the most
important quality for determining image resolution and how much detail is being
displayed (“Image Quality Factors - Imatest Documents,” 2014). It represents the
subjective perception of an edge (an edge profile), and can be measured using
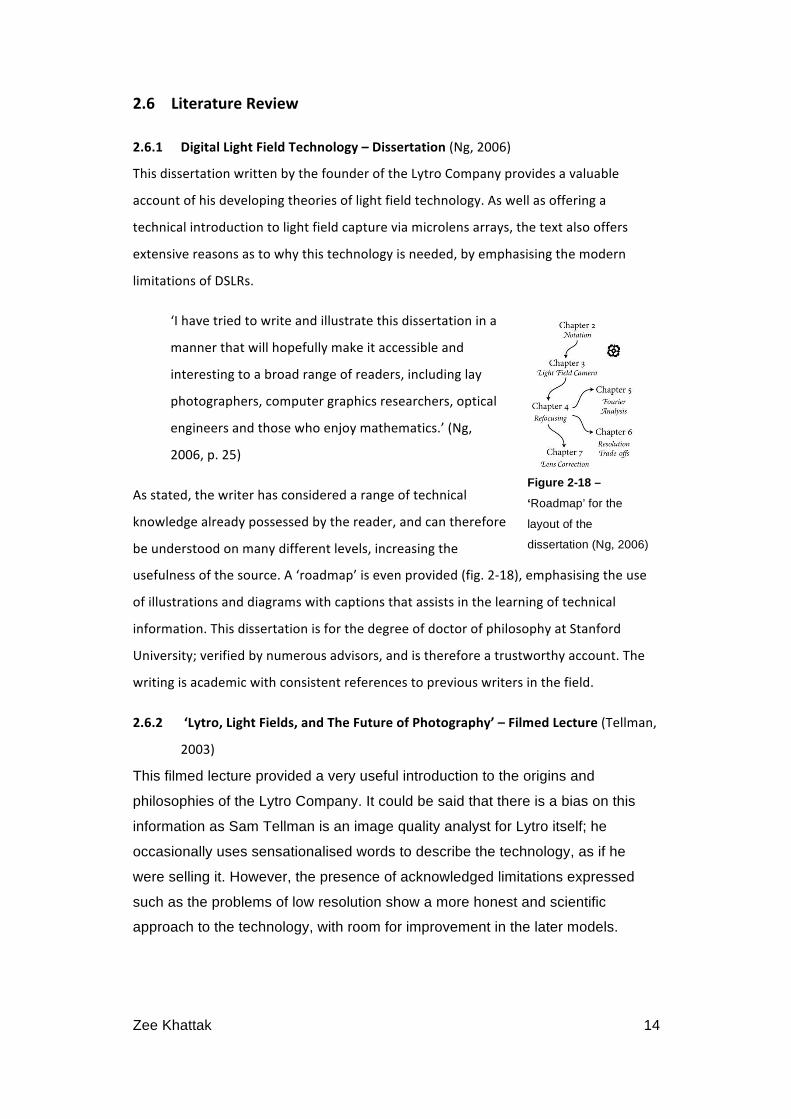
MTF on applications like Imatest (Allen & Triantaphillidou, 2011). An ISO 12233
test chart can be set up in a controlled lab and photographed in order to test the
lens resolution; focusing on specific areas for software analysis, such as the
slanted edge lines of the ‘H’ shape for sharpness testing (fig. 2-17), (Bilissi &
Langford, 2013).
Figure 2-17 – An ISO 12233 test
chart (Bilissi & Langford, 2013), with
highlighted example sharpness
testing area.
Figure 2-86 - High (left) and low (right) spatial
frequency patterns (Galstian, 2013).
Zee Khattak 14
2.6 Literature Review
2.6.1 Digital Light Field Technology – Dissertation (Ng, 2006)
This dissertation written by the founder of the Lytro Company provides a valuable
account of his developing theories of light field technology. As well as offering a
technical introduction to light field capture via microlens arrays, the text also offers
extensive reasons as to why this technology is needed, by emphasising the modern
limitations of DSLRs.
‘I have tried to write and illustrate this dissertation in a
manner that will hopefully make it accessible and
interesting to a broad range of readers, including lay
photographers, computer graphics researchers, optical
engineers and those who enjoy mathematics.’ (Ng,
2006, p. 25)
As stated, the writer has considered a range of technical
knowledge already possessed by the reader, and can therefore
be understood on many different levels, increasing the
usefulness of the source. A ‘roadmap’ is even provided (fig. 2-‐18), emphasising the use
of illustrations and diagrams with captions that assists in the learning of technical
information. This dissertation is for the degree of doctor of philosophy at Stanford
University; verified by numerous advisors, and is therefore a trustworthy account. The
writing is academic with consistent references to previous writers in the field.
2.6.2 ‘Lytro, Light Fields, and The Future of Photography’ – Filmed Lecture (Tellman,
2003)
This filmed lecture provided a very useful introduction to the origins and
philosophies of the Lytro Company. It could be said that there is a bias on this
information as Sam Tellman is an image quality analyst for Lytro itself; he
occasionally uses sensationalised words to describe the technology, as if he
were selling it. However, the presence of acknowledged limitations expressed
such as the problems of low resolution show a more honest and scientific
approach to the technology, with room for improvement in the later models.
Figure 2-18 –
‘Roadmap’ for the
layout of the
dissertation (Ng, 2006)
Zee Khattak 15
The talk features a slideshow that aims to explain how the technology works
through effective diagrams; the use of associating dates clearly puts the Lytro
Company in perspective with other developers in the same field, and within the
history of photographic technology (fig. 2-19). Additionally, information gained on
the company’s use of microlens arrays is some of the most comprehensible
found. Overall this lecture was very specific to the knowledge required for this
section of the report, and led to many other avenues of research.
The year of this lecture for the subject could be seen as out-of-date, however this
was at the time of the release of the first consumer Lytro camera, and is therefore
still relevant to the discussion on the origins of the Lytro Company.
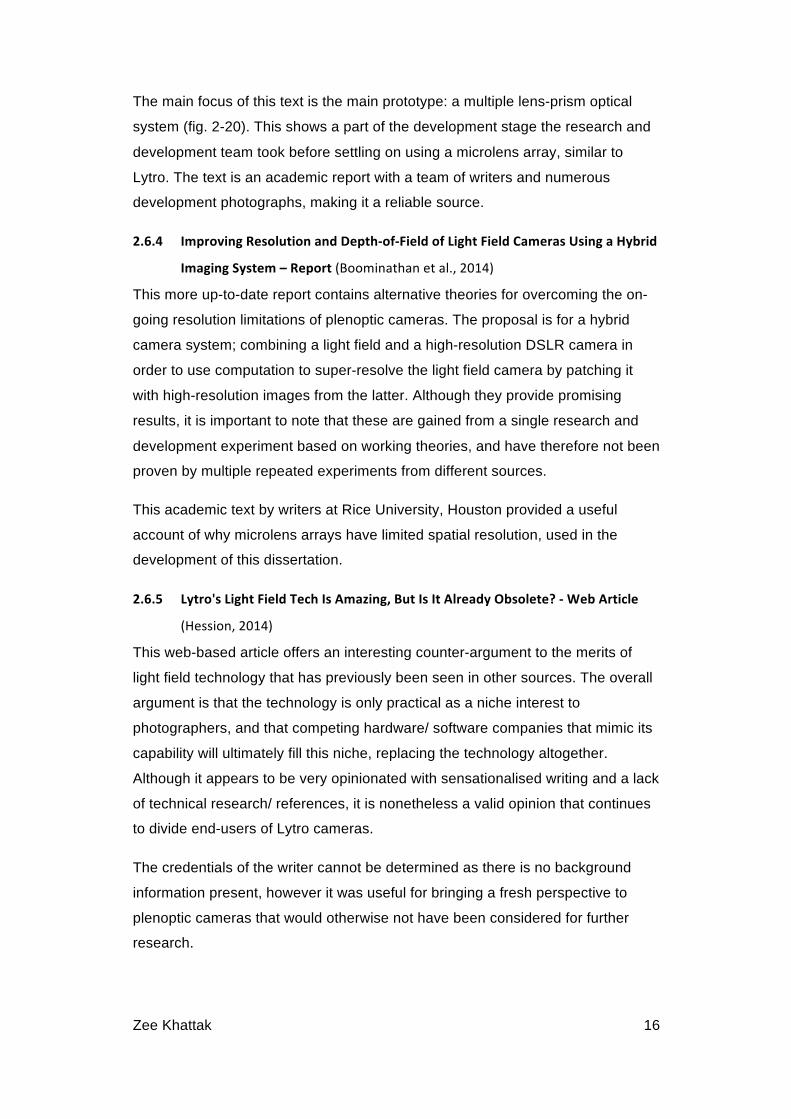
2.6.3 Spatio-‐Angular Resolution Tradeoff in Integral Photography – Journal Article
(Georgeiv et al., 2006)
The fundamental resolution trade-off problem affecting integral and light field
photography alike was defined from reading this
journal article by numerous developers involved
with Adobe Systems and their plenoptic
cameras. This features principal engineer at
Qualcomm Todor Georgiev, whose website
provided vast writings for further research;
mostly aimed at overcoming the same resolution
problem. He also features on the video
demonstration of Adobes 100+ megapixel
plenoptic cameras.
Figure 2-19 – The history of film photography (left), digital photography
(middle) and light field photography (right) (Tellman, 2003).
Figure 2-20 – A novel optical
device developed for Adobe
Systems in researching and
developing plenoptic
technology (Georgeiv et al.,
2006)
Zee Khattak 16
The main focus of this text is the main prototype: a multiple lens-prism optical
system (fig. 2-20). This shows a part of the development stage the research and
development team took before settling on using a microlens array, similar to
Lytro. The text is an academic report with a team of writers and numerous
development photographs, making it a reliable source.
2.6.4 Improving Resolution and Depth-‐of-‐Field of Light Field Cameras Using a Hybrid
Imaging System – Report (Boominathan et al., 2014)
This more up-to-date report contains alternative theories for overcoming the on-
going resolution limitations of plenoptic cameras. The proposal is for a hybrid
camera system; combining a light field and a high-resolution DSLR camera in
order to use computation to super-resolve the light field camera by patching it
with high-resolution images from the latter. Although they provide promising
results, it is important to note that these are gained from a single research and
development experiment based on working theories, and have therefore not been
proven by multiple repeated experiments from different sources.
This academic text by writers at Rice University, Houston provided a useful
account of why microlens arrays have limited spatial resolution, used in the
development of this dissertation.
2.6.5 Lytro's Light Field Tech Is Amazing, But Is It Already Obsolete? -‐ Web Article
(Hession, 2014)
This web-based article offers an interesting counter-argument to the merits of
light field technology that has previously been seen in other sources. The overall
argument is that the technology is only practical as a niche interest to
photographers, and that competing hardware/ software companies that mimic its
capability will ultimately fill this niche, replacing the technology altogether.
Although it appears to be very opinionated with sensationalised writing and a lack
of technical research/ references, it is nonetheless a valid opinion that continues
to divide end-users of Lytro cameras.
The credentials of the writer cannot be determined as there is no background
information present, however it was useful for bringing a fresh perspective to
plenoptic cameras that would otherwise not have been considered for further
research.
Zee Khattak 17
2.6.6 ‘RAW Workflow from Capture to Archives’ – Book (Andrews et al., 2006)
This details the RAW workflow from a photographer end-user perspective, and
was useful in gaining knowledge on the fundamentals of RAW image processing.
The book contains multiple editors, each with their accompanying achievements
in the field of photography and academic writing: increasing the reliability of the
information.
Although this book is slightly out-dated, written in 2006, it still provides the
essential technology behind the RAW image format for the camera to be used in
this project: the Canon D60. The information is clearly spaced out in chapters
relating to the progression of the RAW workflow. High quality diagrams and
screenshots of the relevant software including Adobe Photoshop provide very
clear references to the more technical details covered in the text.
2.6.7 Three-‐Dimensional Television, Video, and Display Technologies – Book (Javidi
& Okano, 2002)
This source provided useful information about the technology of integral
photography and integral imaging. The presence of two editors from different
parts of the world: USA and Japan, highlights the reliability of the information, as
it is based on factual information.
The layout of each chapter follows that of academic literature writing, with an
introduction, citations and references at the end: useful for further research into a
particular field. The provided diagrams break up the technical text information,
however they are occasionally not clearly described in a step-by-step manner;
the book takes for granted a certain technical understanding already possessed
by the reader.

Zee Khattak 18
3 METHODOLOGY
3.1 Primary Research Experiments
Primary research will involve depth resolution lens tests of the Lytro Illum camera
at varying focal lengths, focus distances, and distances from the object.
Additionally the light field camera will be tested against the DSLR Canon D60 in
RAW photography mode to compare the lens performances of the two cameras
against an ideal lens performance.
The purpose of these experiments is to firstly test the lens depth resolution
capabilities of the Lytro Illum camera against the in-camera depth guide for
consistency in image quality. Secondly, the lens resolution differences between
the plenoptic and DSLR camera will be compared in order to discover the extent
of the spatial-angular resolution trade-off in the cameras. An image quality test
lab will be set-up with a measured depth-scene to perform the quality checks,
photographing a resolution chart for image sharpness analysis. All images will be
examined with image analysis software Imatest after post-processing the light
field files with Lytro Desktop and the DSLR RAW files with Iphoto.
3.2 Hypothesis
Figure 3-1 - The refocusable range at 50mm focal
length (35mm equivalent), optical focus ~42cm
(“Depth Composition Features: The Refocusable
Range,” 2014).
Zee Khattak 19
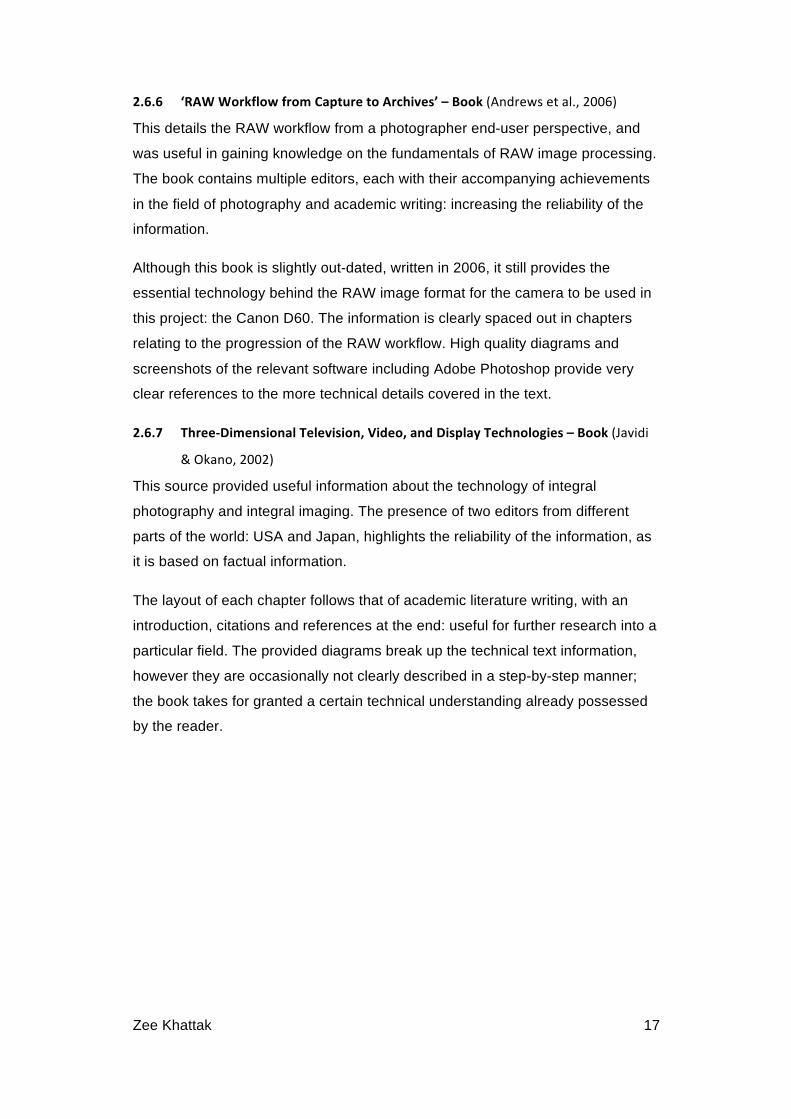
According to Lytro’s guide to the depth refocusing capabilities of the Lytro Illum, it
is predicted that as the focal length of the camera is increased, the refocusable
range will become narrower, as seen in comparing the distance (mm) of the band
of colours between fig. 3-1 and fig. 3-2 (“Depth Composition Features: The
Refocusable Range,” 2014). According to fig. 3-1, for a 50mm lens at optical
focus ~42cm, everything within the band of colours (~240 – 1300mm distance) is
refocusable to provide optimally sharp images. The resolution during testing is
therefore expected to be consistently optimal within the camera-predicted range,
while gradually deteriorating outside of these ranges. The Lytro Illum’s in-camera
predicted range and the Lytro provided guide (fig 3-1) will ultimately be compared
to the findings. According to Josh Anon’s guide to operating the Lytro Illum, it is
predicted the closer the focus distance is to the camera, the narrower the
refocusable range will become (Anon, 2014).
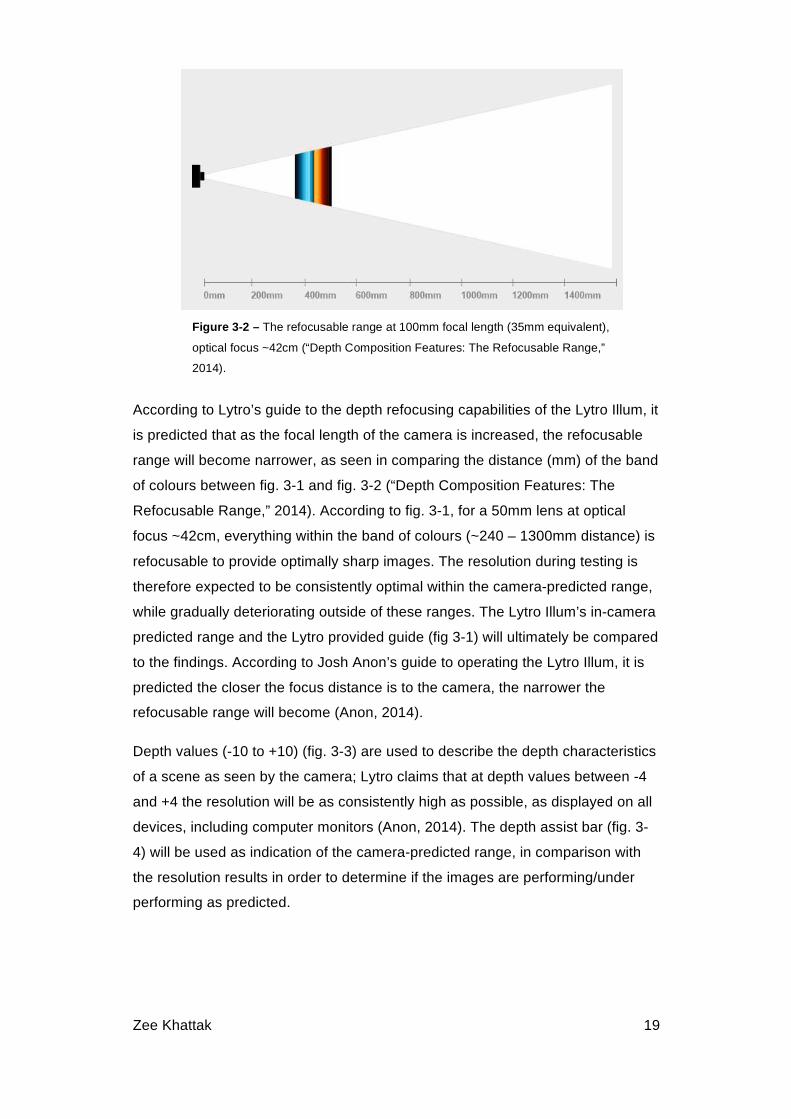
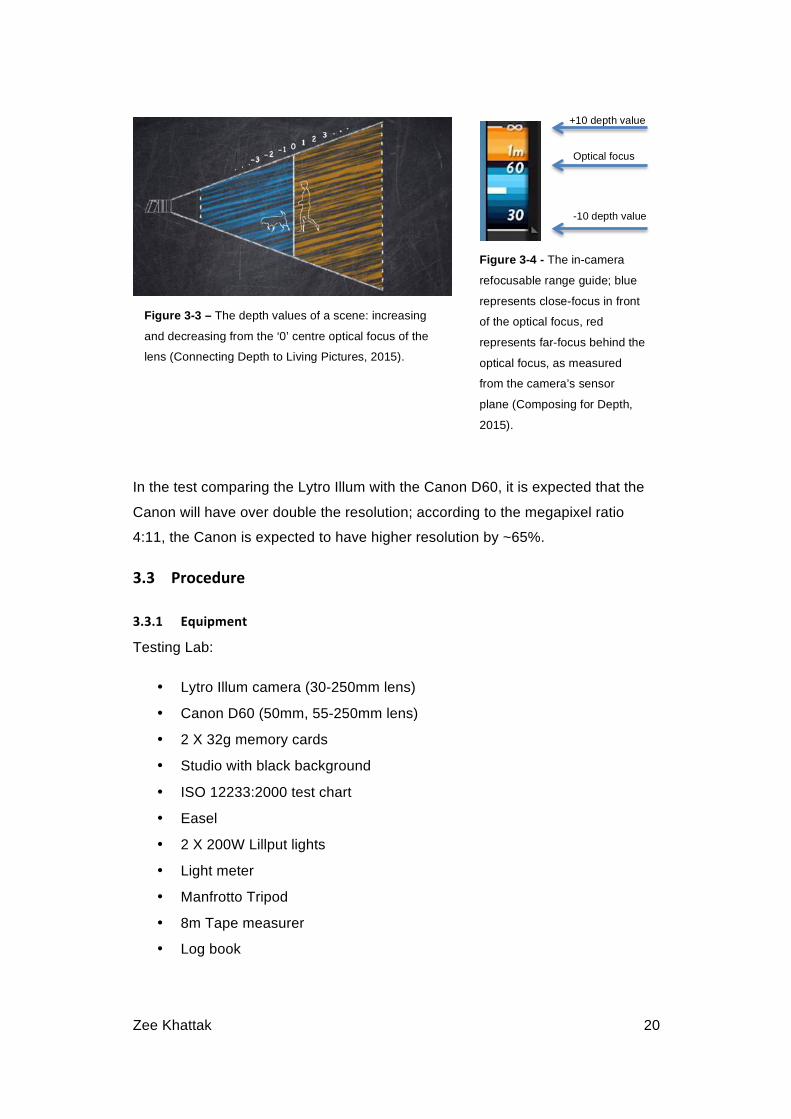
Depth values (-10 to +10) (fig. 3-3) are used to describe the depth characteristics
of a scene as seen by the camera; Lytro claims that at depth values between -4
and +4 the resolution will be as consistently high as possible, as displayed on all
devices, including computer monitors (Anon, 2014). The depth assist bar (fig. 3-
4) will be used as indication of the camera-predicted range, in comparison with
the resolution results in order to determine if the images are performing/under
performing as predicted.
Figure 3-2 – The refocusable range at 100mm focal length (35mm equivalent),
optical focus ~42cm (“Depth Composition Features: The Refocusable Range,”
2014).
Zee Khattak 20
In the test comparing the Lytro Illum with the Canon D60, it is expected that the
Canon will have over double the resolution; according to the megapixel ratio
4:11, the Canon is expected to have higher resolution by ~65%.
3.3 Procedure
3.3.1 Equipment
Testing Lab:
• Lytro Illum camera (30-250mm lens)
• Canon D60 (50mm, 55-250mm lens)
• 2 X 32g memory cards
• Studio with black background
• ISO 12233:2000 test chart
• Easel
• 2 X 200W Lillput lights
• Light meter
• Manfrotto Tripod
• 8m Tape measurer
• Log book
Figure 3-3 – The depth values of a scene: increasing
and decreasing from the ‘0’ centre optical focus of the
lens (Connecting Depth to Living Pictures, 2015).
Figure 3-4 - The in-camera
refocusable range guide; blue
represents close-focus in front
of the optical focus, red
represents far-focus behind the
optical focus, as measured
from the camera’s sensor
plane (Composing for Depth,
2015).
+10 depth value
-10 depth value
Optical focus
Zee Khattak 21
Analysing Results:
• IMac 21.5-inch display
• Lytro Desktop software
• Imatest software
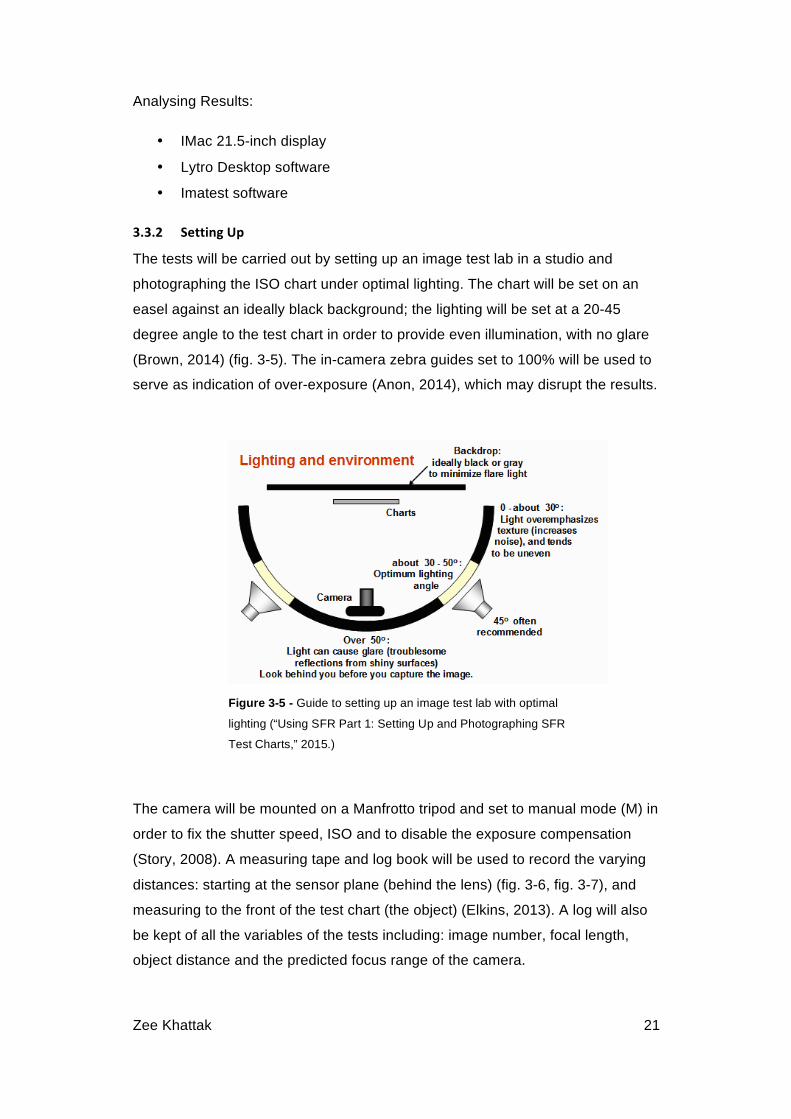
3.3.2 Setting Up
The tests will be carried out by setting up an image test lab in a studio and
photographing the ISO chart under optimal lighting. The chart will be set on an
easel against an ideally black background; the lighting will be set at a 20-45
degree angle to the test chart in order to provide even illumination, with no glare
(Brown, 2014) (fig. 3-5). The in-camera zebra guides set to 100% will be used to
serve as indication of over-exposure (Anon, 2014), which may disrupt the results.
The camera will be mounted on a Manfrotto tripod and set to manual mode (M) in
order to fix the shutter speed, ISO and to disable the exposure compensation
(Story, 2008). A measuring tape and log book will be used to record the varying
distances: starting at the sensor plane (behind the lens) (fig. 3-6, fig. 3-7), and
measuring to the front of the test chart (the object) (Elkins, 2013). A log will also
be kept of all the variables of the tests including: image number, focal length,
object distance and the predicted focus range of the camera.
Figure 3-5 - Guide to setting up an image test lab with optimal
lighting (“Using SFR Part 1: Setting Up and Photographing SFR
Test Charts,” 2015.)
Zee Khattak 22
3.3.3 Tests 1
The Lytro camera will be formatted to ensure the recorded image number will
match the files contained on the SD card. Test 1 will proceed by setting the Lytro
Illum at a constant focal length of 30mm using the zoom dial, firstly with the focal
plane 40cm away from the test chart (object), aligning the test chart centrally.
The range of distances-of-focus will be captured in sequential order; taking a
photo at 2 varying focus points above the minimum 40cm. The lower range of
focus distances below 40cm cannot be measured, as a minimum distance from
the chart must be kept in order to provide reliable results; ensuring the lens
accuracy will be tested instead of testing the print quality of the chart (“Using SFR
Part 1: Setting Up and Photographing SFR Test Charts,” 2015).
The first photo will be taken, logging the photo number and corresponding test
variables, then the focus changed to the second focal distance and a second
photo will be taken. This will be repeated at the varying distances: 60, 90, 120 up
to 210 cm; of which this practical limit is chosen in order to ensure an appropriate
edge can still be analysed with the Imatest software, as discovered in the
preliminary testing phase.
3.3.4 Test 2
Test 2 will repeat the same procedure as Test 1, this time setting the Lytro
camera to focal length 50mm.
3.3.5 Test 3
The Lytro camera will be set to focal length 80mm, and the procedure repeated.
Figure 3-6 - Mark indicating
the sensor plane (Elkins,
2013).
Figure 3-7 – First-hand photograph: the
sensor plane mark on the Lytro Illum.
Zee Khattak 23
3.3.6 Test 4
The Canon DSLR will be mounted on the tripod, and fixed at an optimal distance
130cm from the test chart at 50mm focal length, matching the f/2 aperture of the
Illum, and ensuring the ISO and shutter speeds are noted as the same. The
camera will be auto-focused onto the chart, and the image taken. A number of
images will be taken with the same position as backup files for analysis. The
Lytro Illum will be setup, matching exactly the above settings of the DSLR, and
multiple images taken at these optimal settings into order to perform comparative
resolution analysis.
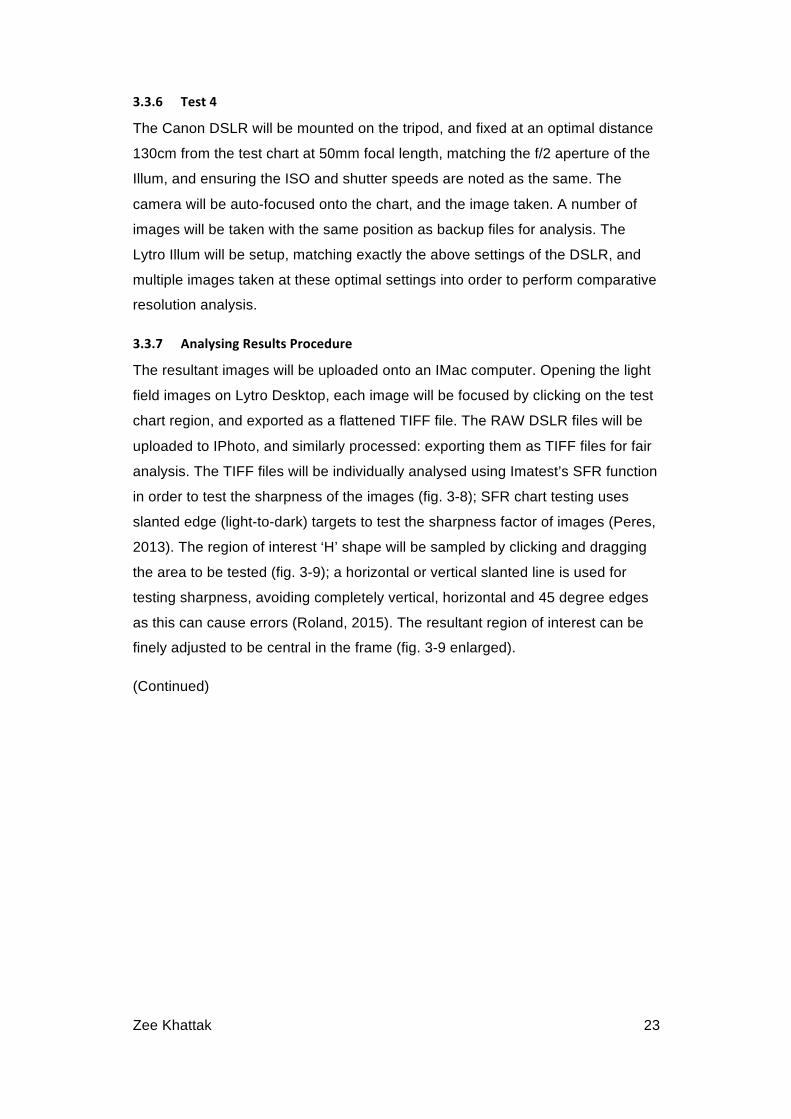
3.3.7 Analysing Results Procedure
The resultant images will be uploaded onto an IMac computer. Opening the light
field images on Lytro Desktop, each image will be focused by clicking on the test
chart region, and exported as a flattened TIFF file. The RAW DSLR files will be
uploaded to IPhoto, and similarly processed: exporting them as TIFF files for fair
analysis. The TIFF files will be individually analysed using Imatest’s SFR function
in order to test the sharpness of the images (fig. 3-8); SFR chart testing uses
slanted edge (light-to-dark) targets to test the sharpness factor of images (Peres,
2013). The region of interest ‘H’ shape will be sampled by clicking and dragging
the area to be tested (fig. 3-9); a horizontal or vertical slanted line is used for
testing sharpness, avoiding completely vertical, horizontal and 45 degree edges
as this can cause errors (Roland, 2015). The resultant region of interest can be
finely adjusted to be central in the frame (fig. 3-9 enlarged).
(Continued)
Zee Khattak 24
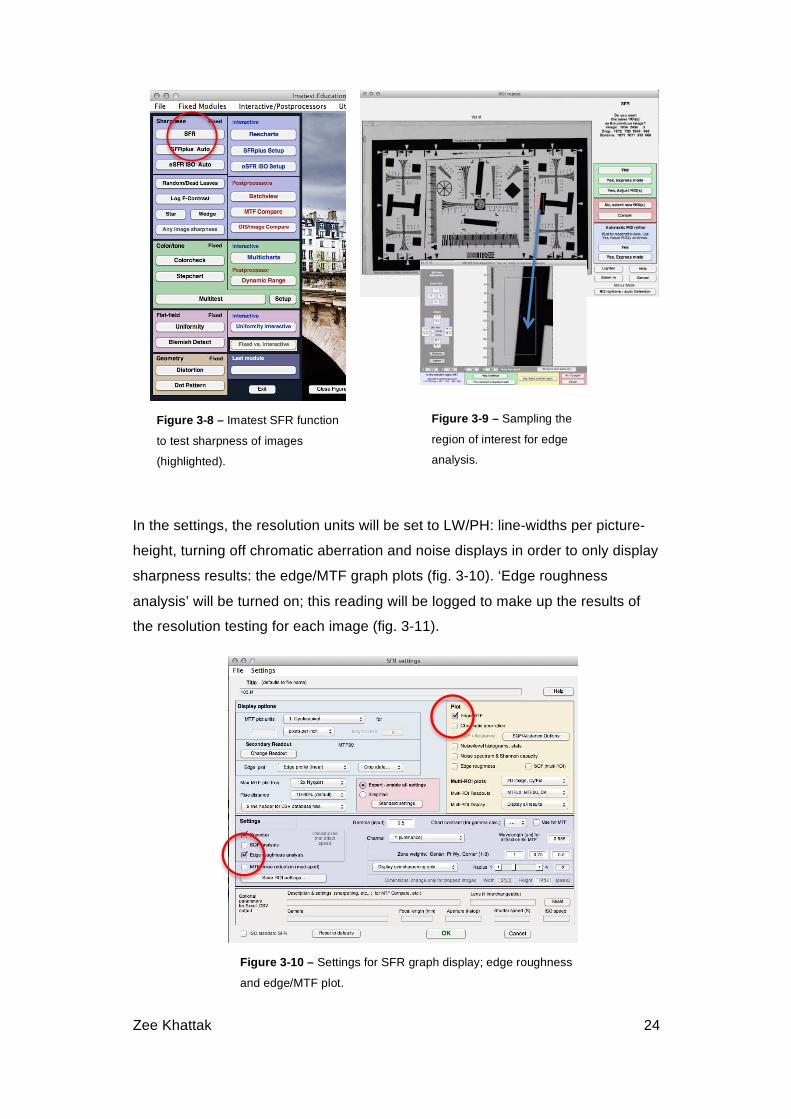
In the settings, the resolution units will be set to LW/PH: line-widths per picture-
height, turning off chromatic aberration and noise displays in order to only display
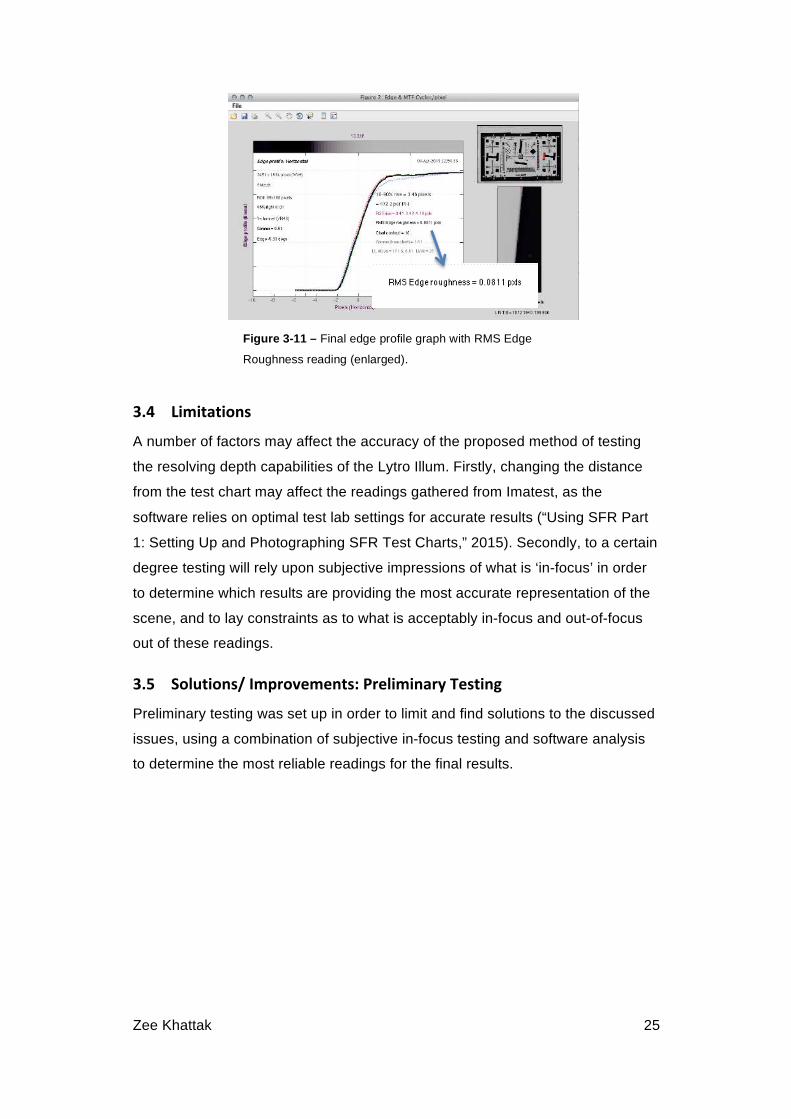
sharpness results: the edge/MTF graph plots (fig. 3-10). ‘Edge roughness
analysis’ will be turned on; this reading will be logged to make up the results of
the resolution testing for each image (fig. 3-11).
Figure 3-8 – Imatest SFR function
to test sharpness of images
(highlighted).
Figure 3-9 – Sampling the
region of interest for edge
analysis.
Figure 3-10 – Settings for SFR graph display; edge roughness
and edge/MTF plot.
Zee Khattak 25
3.4 Limitations
A number of factors may affect the accuracy of the proposed method of testing
the resolving depth capabilities of the Lytro Illum. Firstly, changing the distance
from the test chart may affect the readings gathered from Imatest, as the
software relies on optimal test lab settings for accurate results (“Using SFR Part
1: Setting Up and Photographing SFR Test Charts,” 2015). Secondly, to a certain
degree testing will rely upon subjective impressions of what is ‘in-focus’ in order
to determine which results are providing the most accurate representation of the
scene, and to lay constraints as to what is acceptably in-focus and out-of-focus
out of these readings.
3.5 Solutions/ Improvements: Preliminary Testing
Preliminary testing was set up in order to limit and find solutions to the discussed
issues, using a combination of subjective in-focus testing and software analysis
to determine the most reliable readings for the final results.
Figure 3-11 – Final edge profile graph with RMS Edge
Roughness reading (enlarged).
Zee Khattak 26
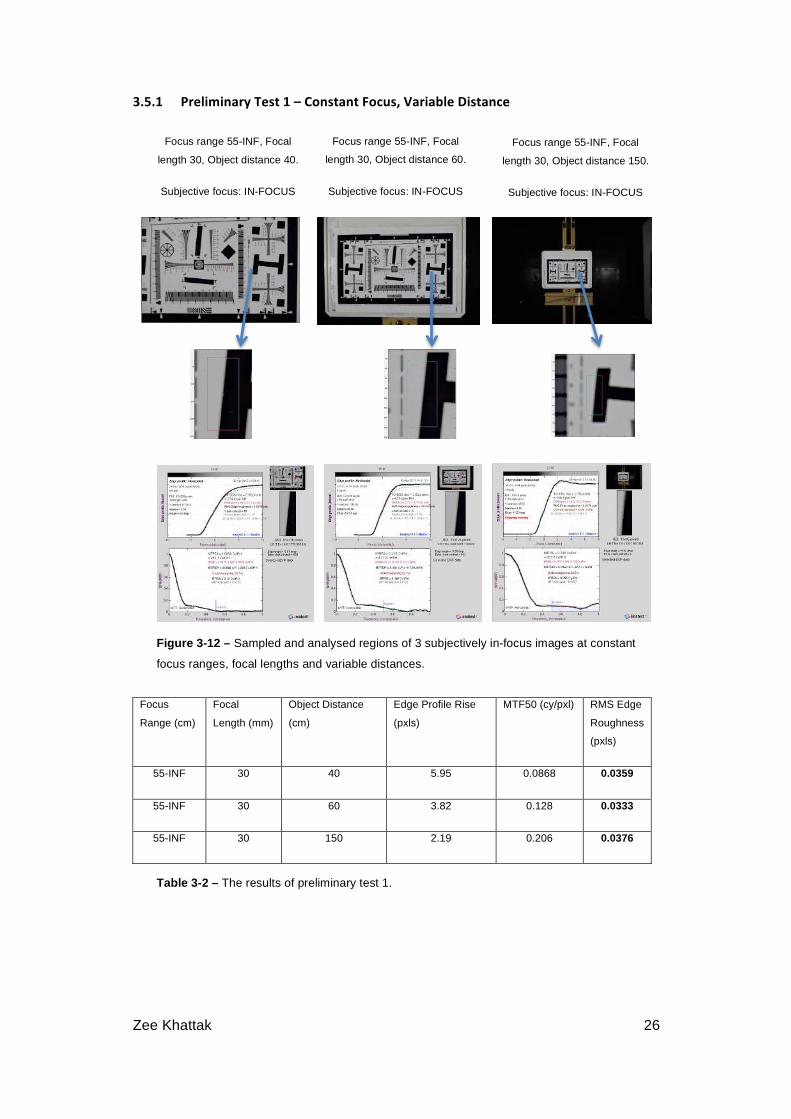
3.5.1 Preliminary Test 1 – Constant Focus, Variable Distance
Focus
Range (cm)
Focal
Length (mm)
Object Distance
(cm)
Edge Profile Rise
(pxls)
MTF50 (cy/pxl) RMS Edge
Roughness
(pxls)
55-INF 30 40 5.95 0.0868 0.0359
55-INF 30 60 3.82 0.128 0.0333
55-INF 30 150 2.19 0.206 0.0376
Focus range 55-INF, Focal
length 30, Object distance 40.
Subjective focus: IN-FOCUS
Focus range 55-INF, Focal
length 30, Object distance 60.
Subjective focus: IN-FOCUS
Focus range 55-INF, Focal
length 30, Object distance 150.
Subjective focus: IN-FOCUS
Figure 3-12 – Sampled and analysed regions of 3 subjectively in-focus images at constant
focus ranges, focal lengths and variable distances.
Table 3-2 – The results of preliminary test 1.
Zee Khattak 27
Based on the first preliminary test analysing the results on Imatest (fig. 3-12), it
has been discerned that despite the subjective impression of the charts being in-
focus for a constant focal length and focal range, the Edge Profile Rise reading
and MTF50 does not give an accurate representation of the readings, as they
appear to be diminishing in size (table 3-1); essentially showing an increase in
resolution (Nasse, 2008). This does not support the findings, and can be
attributed to the one variable: the fact that the chart sample area is becoming
consistently smaller as the distance from the object increases. On the other
hand, the RMS Edge Roughness reading is consistent, and can therefore be
assumed to be accurately representing the resolution of the in-focus charts;
however an out-of-focus test must be first undertaken for comparison.
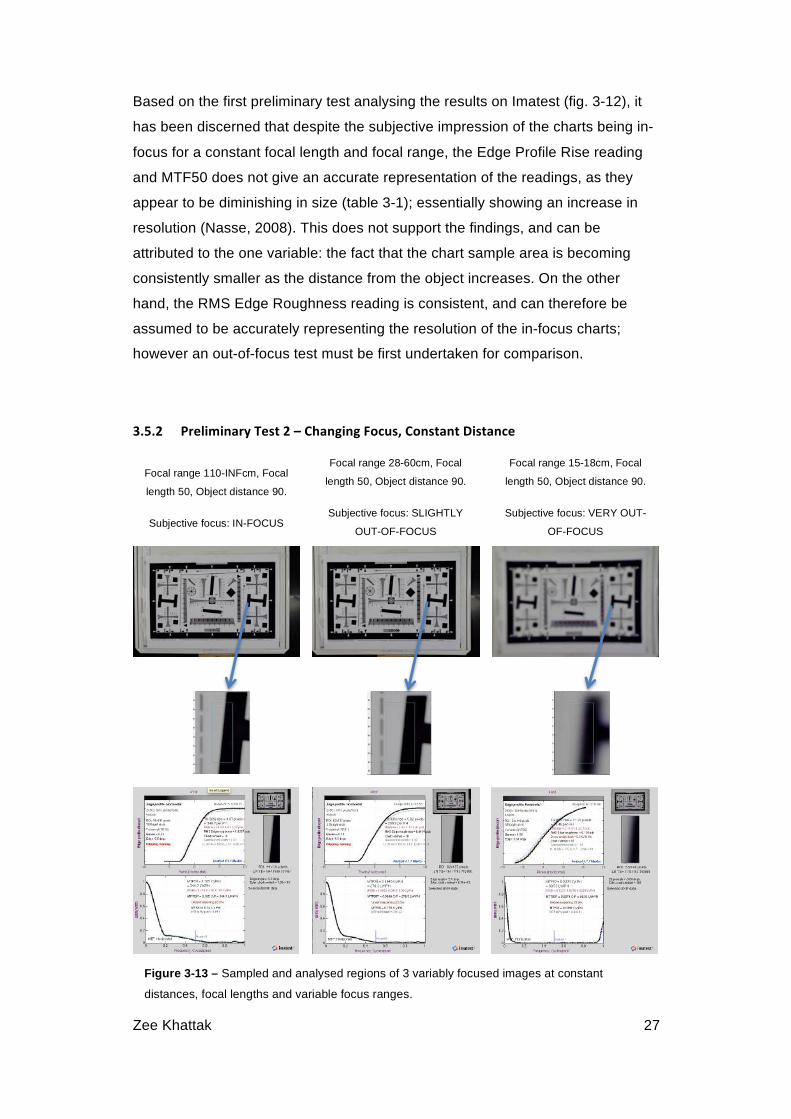
3.5.2 Preliminary Test 2 – Changing Focus, Constant Distance
Focal range 110-INFcm, Focal
length 50, Object distance 90.
Subjective focus: IN-FOCUS
Focal range 28-60cm, Focal
length 50, Object distance 90.
Subjective focus: SLIGHTLY
OUT-OF-FOCUS
Focal range 15-18cm, Focal
length 50, Object distance 90.
Subjective focus: VERY OUT-
OF-FOCUS
Figure 3-13 – Sampled and analysed regions of 3 variably focused images at constant
distances, focal lengths and variable focus ranges.
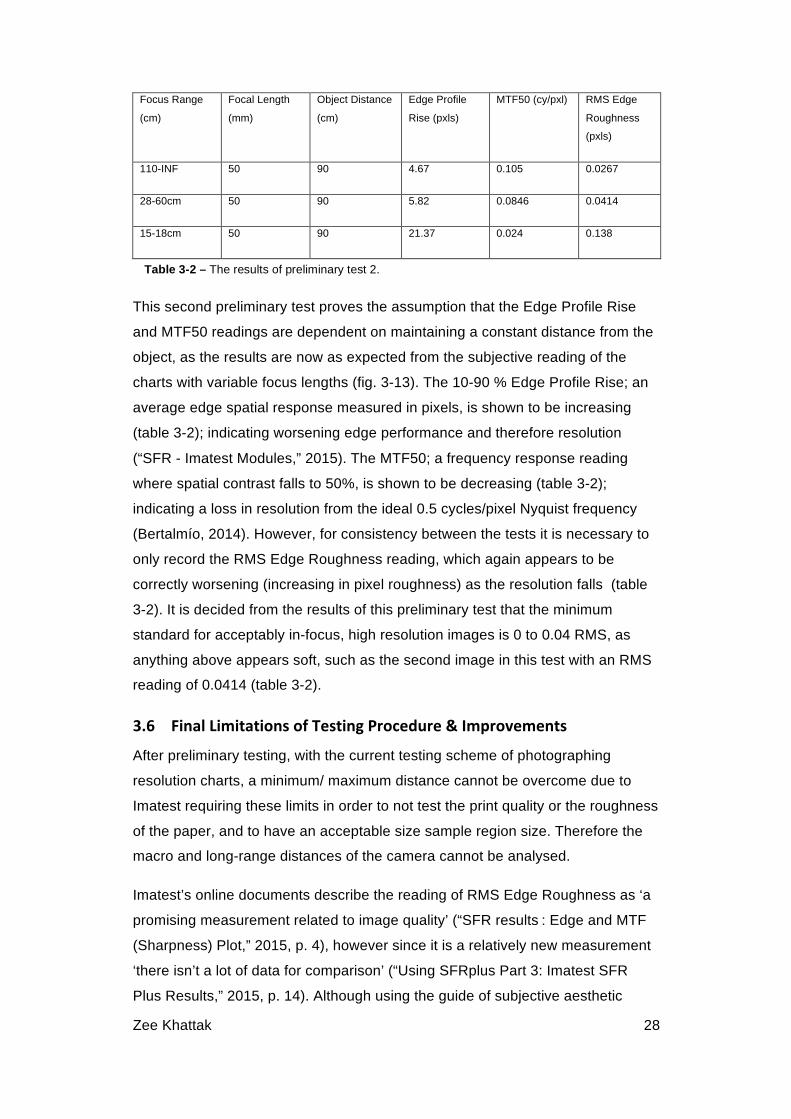
Zee Khattak 28
Focus Range
(cm) Focal Length
(mm) Object Distance
(cm) Edge Profile
Rise (pxls) MTF50 (cy/pxl) RMS Edge
Roughness
(pxls)
110-INF 50 90 4.67 0.105 0.0267
28-60cm 50 90 5.82 0.0846 0.0414
15-18cm 50 90 21.37 0.024 0.138
This second preliminary test proves the assumption that the Edge Profile Rise
and MTF50 readings are dependent on maintaining a constant distance from the
object, as the results are now as expected from the subjective reading of the
charts with variable focus lengths (fig. 3-13). The 10-90 % Edge Profile Rise; an
average edge spatial response measured in pixels, is shown to be increasing
(table 3-2); indicating worsening edge performance and therefore resolution
(“SFR - Imatest Modules,” 2015). The MTF50; a frequency response reading
where spatial contrast falls to 50%, is shown to be decreasing (table 3-2);
indicating a loss in resolution from the ideal 0.5 cycles/pixel Nyquist frequency
(Bertalmío, 2014). However, for consistency between the tests it is necessary to
only record the RMS Edge Roughness reading, which again appears to be
correctly worsening (increasing in pixel roughness) as the resolution falls (table
3-2). It is decided from the results of this preliminary test that the minimum
standard for acceptably in-focus, high resolution images is 0 to 0.04 RMS, as
anything above appears soft, such as the second image in this test with an RMS
reading of 0.0414 (table 3-2).
3.6 Final Limitations of Testing Procedure & Improvements
After preliminary testing, with the current testing scheme of photographing
resolution charts, a minimum/ maximum distance cannot be overcome due to
Imatest requiring these limits in order to not test the print quality or the roughness
of the paper, and to have an acceptable size sample region size. Therefore the
macro and long-range distances of the camera cannot be analysed.
Imatest’s online documents describe the reading of RMS Edge Roughness as ‘a
promising measurement related to image quality’ (“SFR results : Edge and MTF
(Sharpness) Plot,” 2015, p. 4), however since it is a relatively new measurement
‘there isn’t a lot of data for comparison’ (“Using SFRplus Part 3: Imatest SFR
Plus Results,” 2015, p. 14). Although using the guide of subjective aesthetic
Table 3-2 – The results of preliminary test 2.
Zee Khattak 29
opinion alongside this new form of image sharpness testing perhaps limits the
reliability of this method, the preliminary testing nonetheless provided promising
results for comparison.
As the preliminary testing showed, once the distance from the test chart was
fixed, the other MTF data acquired became usable; the MTF-50 reading will be
used instead of the RMS reading in the comparison between the light field and
DSLR camera for Test 4.
3.7 Alternative Approaches
Alternative methodologies were considered in the developmental phase of this
project, considering the main objective of how to test the spatial and depth
resolution of the Lytro Illum camera in comparison with the Canon D60. The main
approaches considered were as follows:
1. Using the image processing software Matlab to analyse the light field
image metadata in order to determine the depth information data,
comparing this with conventional DSLR metadata.
Methods of opening the image data of the light field file have been undertaken
before, demonstrating the uniqueness of the LF coding (Patel, 2012). However,
for this project limitations of this method include the fact that results would take
the form of complex metadata, which is difficult to describe and represent as
quantitative figures for analysis.
2. Investigating means of turning a DSLR into a depth-capturing light field
device; creating an artefact of a light field image with the full RAW
resolution of DSLR photography.
Such methods have been tried, and successfully succeeded in methods of
stacking DSLR images to create a light-field mimicking image, with simple
applications online to repeat these experiments (Vaish & Adams, 2008). This
demonstration was considered too simple for the scope of this project, with little
to conclude on. On the other hand, creating a truly hybrid system of a DSLR that
can capture the light field in a single shot, such as is proposed by Boominathan
et al., was considered far beyond the scope of the project.
3. Using Lytro Desktop to export multiple stacked TIFF files for each light
field image of the ISO resolution chart, analysing their relative resolutions
Zee Khattak 30
with Imatest to determine the depth capture capabilities of the camera (at
differing distances, focus ranges and focal lengths).
This methodology seemed an effective testing scheme, however this would have
made the workflow more complex; the proposed methodology of this report was
deemed more suitable considering time constraints, and was chosen on the basis
of testing the constant settings of the focal length at variable distances.
4. Performing a range of image quality tests on the Lytro Illum and Canon
D60; including colour accuracy, noise, dynamic range and chromatic
aberration.
Multiple other factors such as those listed above also affect final output viewing
resolution of images (“Image Quality Factors - Imatest Documents,” 2014).
However due to the already complex method of analysing the depth resolution of
the Lytro Illum in tests 1 through 3, and considering time constraints, it was
deemed that focusing on the one factor of sharpness was suitable for the scope
of this project. Sharpness is, after all defined as one of the most, if not the most
important factor affecting perceived image quality (“Image Quality Factors -
Imatest Documents,” 2014).
(Continued)
Zee Khattak 31
4 Results
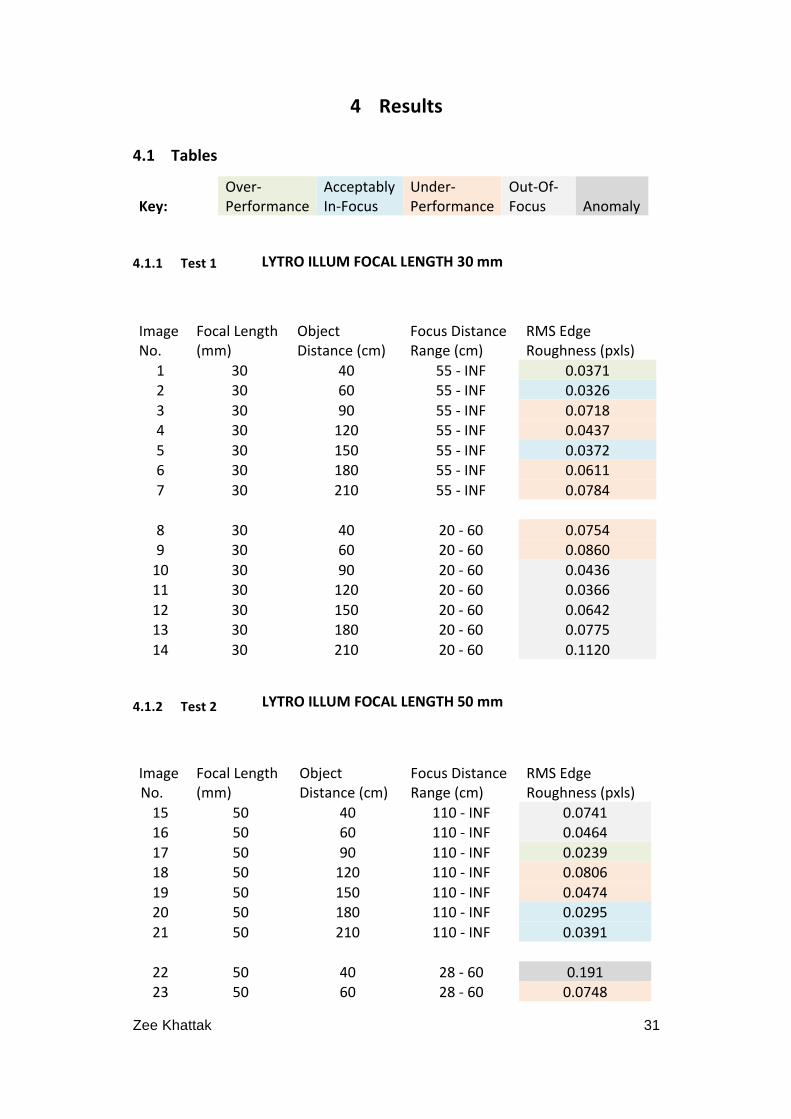
4.1 Tables
Key: Over-‐Performance
Acceptably In-‐Focus
Under-‐Performance
Out-‐Of-‐Focus Anomaly
4.1.1 Test 1
Image No.
Focal Length (mm)
Object Distance (cm)
Focus Distance Range (cm)
RMS Edge Roughness (pxls)
1 30 40 55 -‐ INF 0.0371 2 30 60 55 -‐ INF 0.0326 3 30 90 55 -‐ INF 0.0718 4 30 120 55 -‐ INF 0.0437 5 30 150 55 -‐ INF 0.0372 6 30 180 55 -‐ INF 0.0611 7 30 210 55 -‐ INF 0.0784
8 30 40 20 -‐ 60 0.0754 9 30 60 20 -‐ 60 0.0860 10 30 90 20 -‐ 60 0.0436 11 30 120 20 -‐ 60 0.0366 12 30 150 20 -‐ 60 0.0642 13 30 180 20 -‐ 60 0.0775 14 30 210 20 -‐ 60 0.1120
4.1.2 Test 2
Image No.
Focal Length (mm)
Object Distance (cm)
Focus Distance Range (cm)
RMS Edge Roughness (pxls)
15 50 40 110 -‐ INF 0.0741 16 50 60 110 -‐ INF 0.0464 17 50 90 110 -‐ INF 0.0239 18 50 120 110 -‐ INF 0.0806 19 50 150 110 -‐ INF 0.0474 20 50 180 110 -‐ INF 0.0295 21 50 210 110 -‐ INF 0.0391
22 50 40 28 -‐ 60 0.191 23 50 60 28 -‐ 60 0.0748
LYTRO ILLUM FOCAL LENGTH 30 mm
LYTRO ILLUM FOCAL LENGTH 50 mm
Zee Khattak 32
24 50 90 28 -‐ 60 0.042 25 50 120 28 -‐ 60 0.0328 26 50 150 28 -‐ 60 0.0614 26 50 180 28 -‐ 60 0.0619 27 50 210 28 -‐ 60 0.133
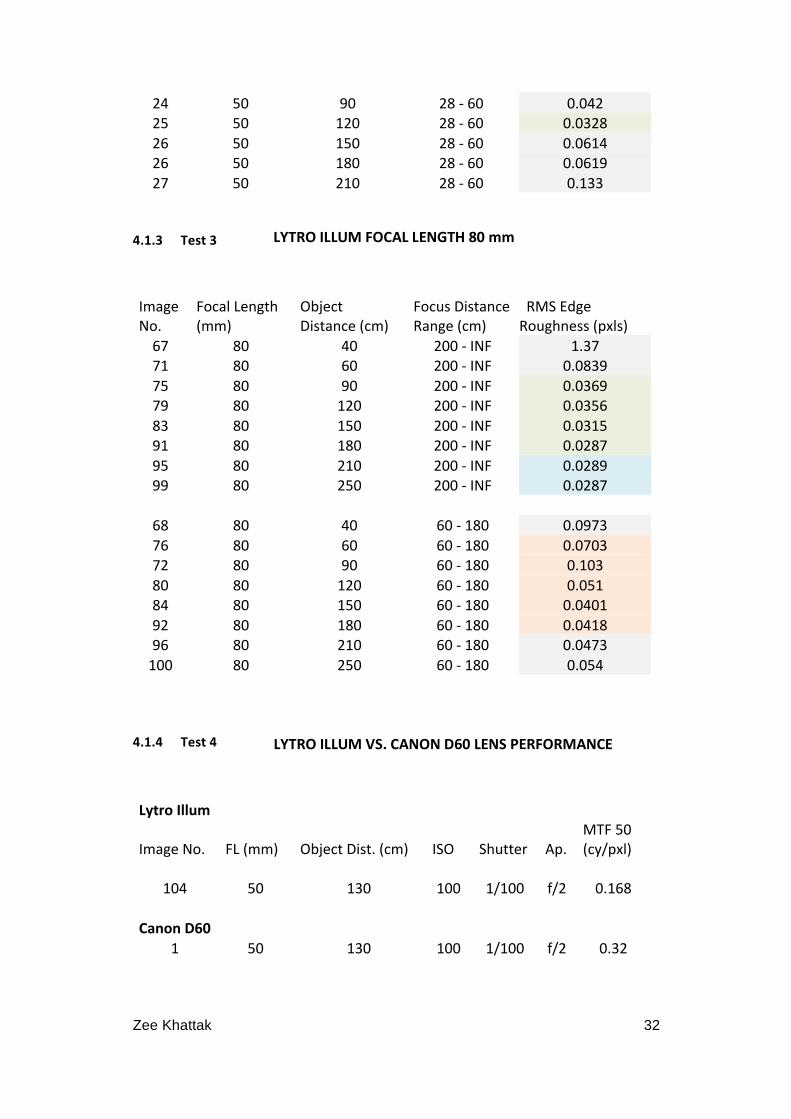
4.1.3 Test 3
Image No.
Focal Length (mm)
Object Distance (cm)
Focus Distance Range (cm)
RMS Edge Roughness (pxls)
67 80 40 200 -‐ INF 1.37 71 80 60 200 -‐ INF 0.0839 75 80 90 200 -‐ INF 0.0369 79 80 120 200 -‐ INF 0.0356 83 80 150 200 -‐ INF 0.0315 91 80 180 200 -‐ INF 0.0287 95 80 210 200 -‐ INF 0.0289 99 80 250 200 -‐ INF 0.0287
68 80 40 60 -‐ 180 0.0973 76 80 60 60 -‐ 180 0.0703 72 80 90 60 -‐ 180 0.103 80 80 120 60 -‐ 180 0.051 84 80 150 60 -‐ 180 0.0401 92 80 180 60 -‐ 180 0.0418 96 80 210 60 -‐ 180 0.0473 100 80 250 60 -‐ 180 0.054
4.1.4 Test 4
Lytro Illum
Image No.
FL (mm)
Object Dist. (cm)
ISO
Shutter
Ap.
MTF 50 (cy/pxl)
104 50 130 100 1/100 f/2 0.168
Canon D60 1 50 130 100 1/100 f/2 0.32
LYTRO ILLUM FOCAL LENGTH 80 mm
LYTRO ILLUM VS. CANON D60 LENS PERFORMANCE
Zee Khattak 33
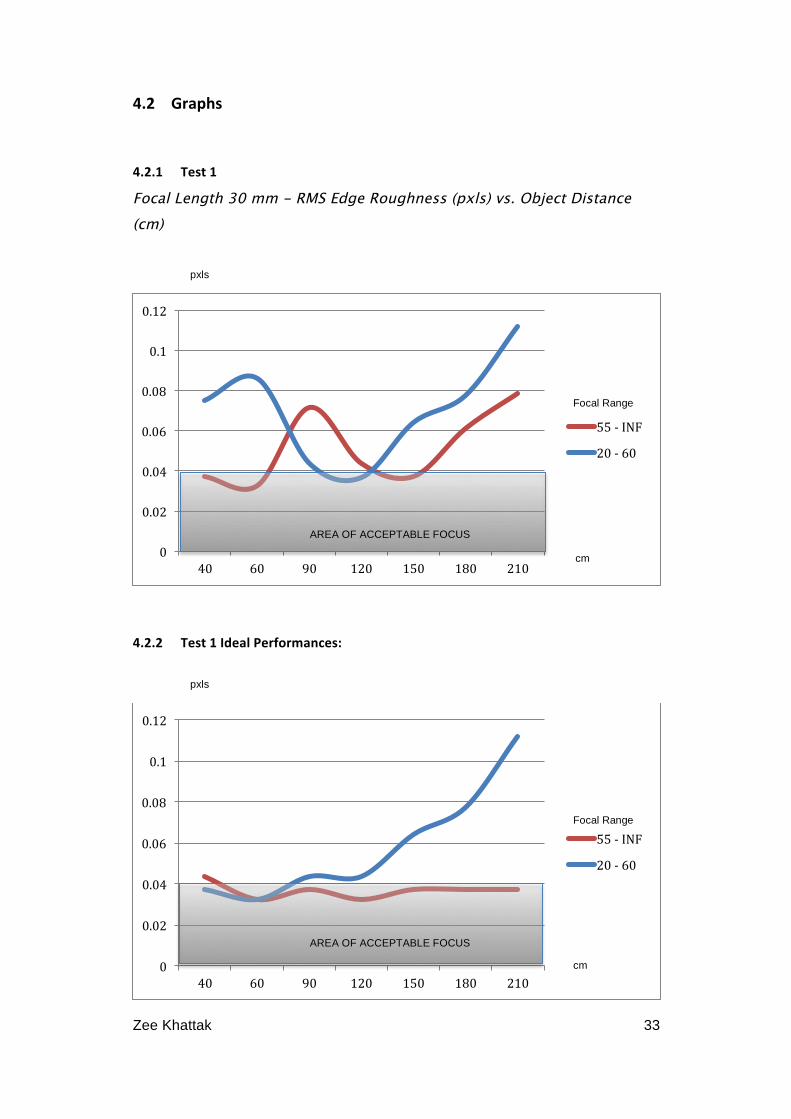
4.2 Graphs
4.2.1 Test 1
Focal Length 30 mm - RMS Edge Roughness (pxls) vs. Object Distance (cm)
4.2.2 Test 1 Ideal Performances:
0
0.02
0.04
0.06
0.08
0.1
0.12
40 60 90 120 150 180 210
55 -‐ INF
20 -‐ 60
0
0.02
0.04
0.06
0.08
0.1
0.12
40 60 90 120 150 180 210
55 -‐ INF
20 -‐ 60
cm
pxls
AREA OF ACCEPTABLE FOCUS
Focal Range
cm
pxls
AREA OF ACCEPTABLE FOCUS
Focal Range
Zee Khattak 34
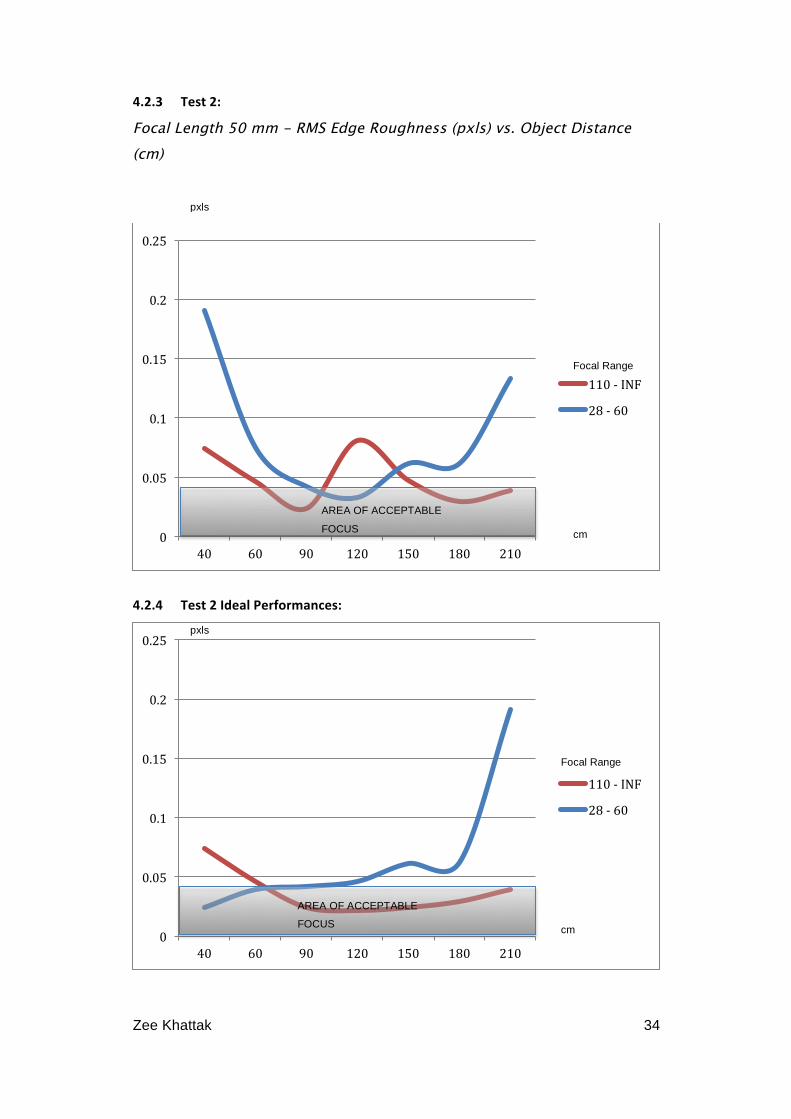
4.2.3 Test 2:
Focal Length 50 mm - RMS Edge Roughness (pxls) vs. Object Distance (cm)
4.2.4 Test 2 Ideal Performances:
0
0.05
0.1
0.15
0.2
0.25
40 60 90 120 150 180 210
110 -‐ INF
28 -‐ 60
0
0.05
0.1
0.15
0.2
0.25
40 60 90 120 150 180 210
110 -‐ INF
28 -‐ 60
pxls
Focal Range
cm
pxls
Focal Range
cm
AREA OF ACCEPTABLE
FOCUS
AREA OF ACCEPTABLE
FOCUS
Zee Khattak 35
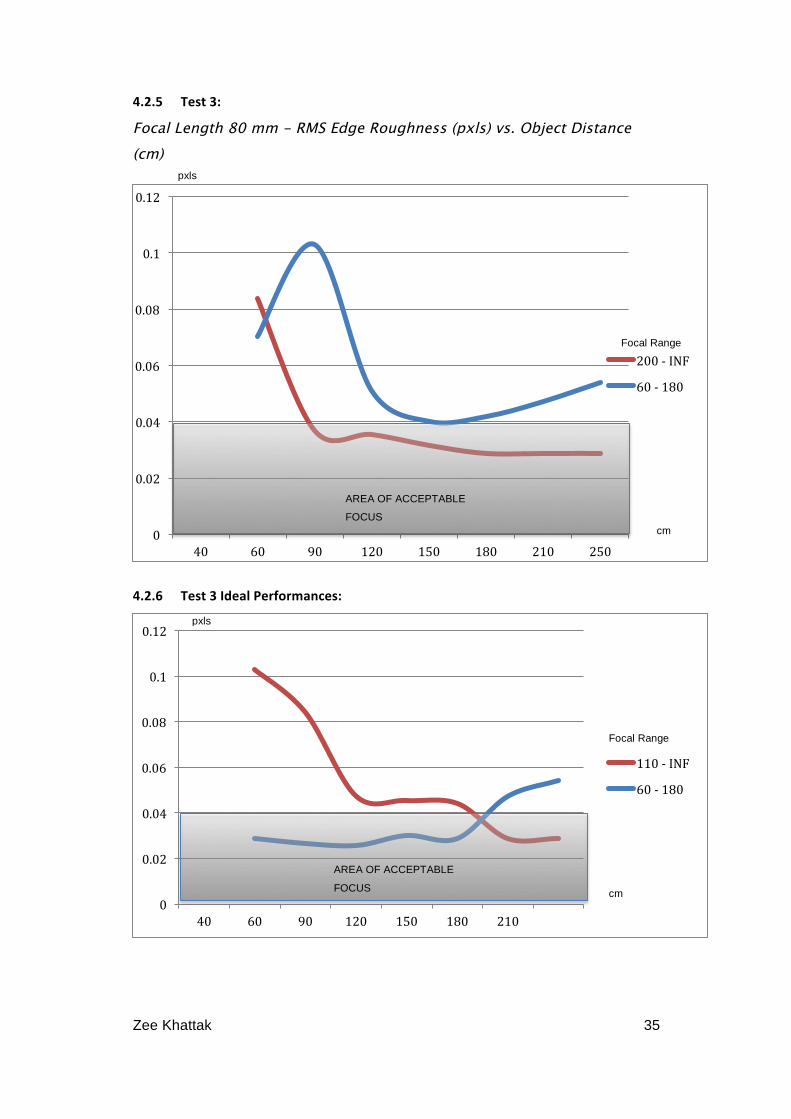
4.2.5 Test 3:
Focal Length 80 mm - RMS Edge Roughness (pxls) vs. Object Distance (cm)
4.2.6 Test 3 Ideal Performances:
0
0.02
0.04
0.06
0.08
0.1
0.12
40 60 90 120 150 180 210 250
200 -‐ INF
60 -‐ 180
0
0.02
0.04
0.06
0.08
0.1
0.12
40 60 90 120 150 180 210
110 -‐ INF
60 -‐ 180
pxls
Focal Range
cm
AREA OF ACCEPTABLE
FOCUS
pxls
Focal Range
cm
AREA OF ACCEPTABLE
FOCUS
Zee Khattak 36
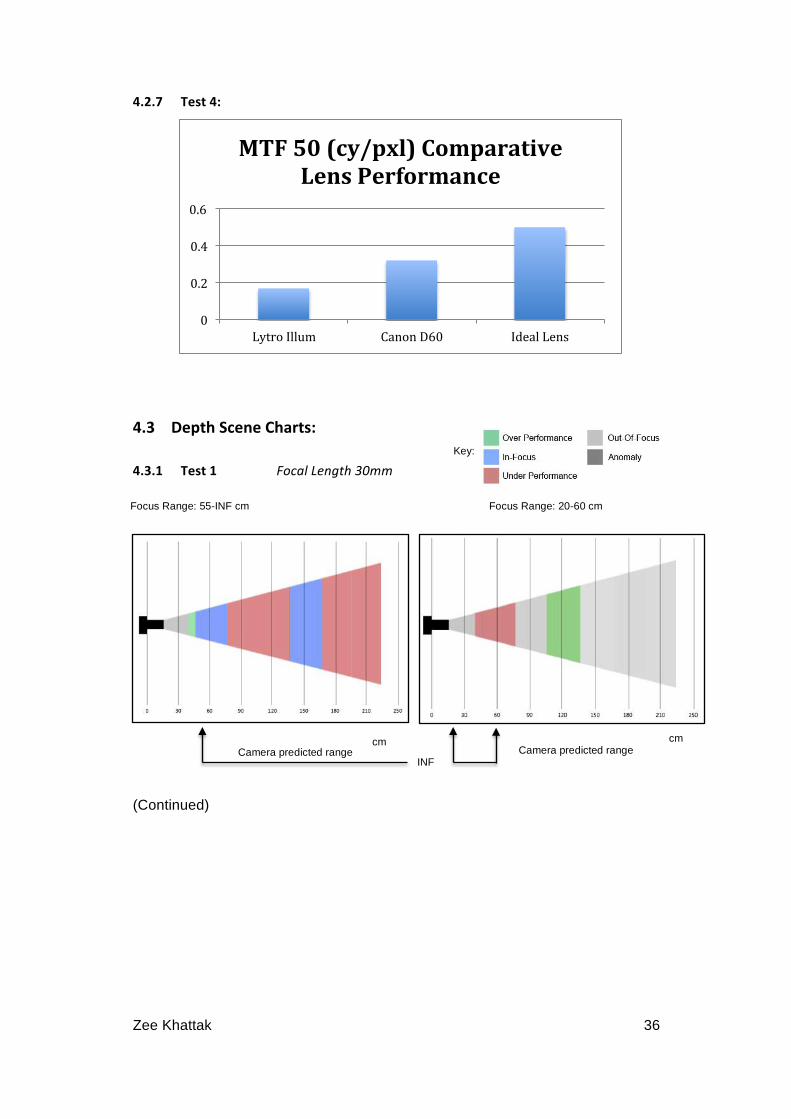
4.2.7 Test 4:
4.3 Depth Scene Charts:
4.3.1 Test 1 Focal Length 30mm
(Continued)
0
0.2
0.4
0.6
Lytro Illum Canon D60 Ideal Lens
MTF 50 (cy/pxl) Comparative Lens Performance
Focus Range: 55-INF cm Focus Range: 20-60 cm
cm cm
INF Camera predicted range
Key:
Camera predicted range
Zee Khattak 37
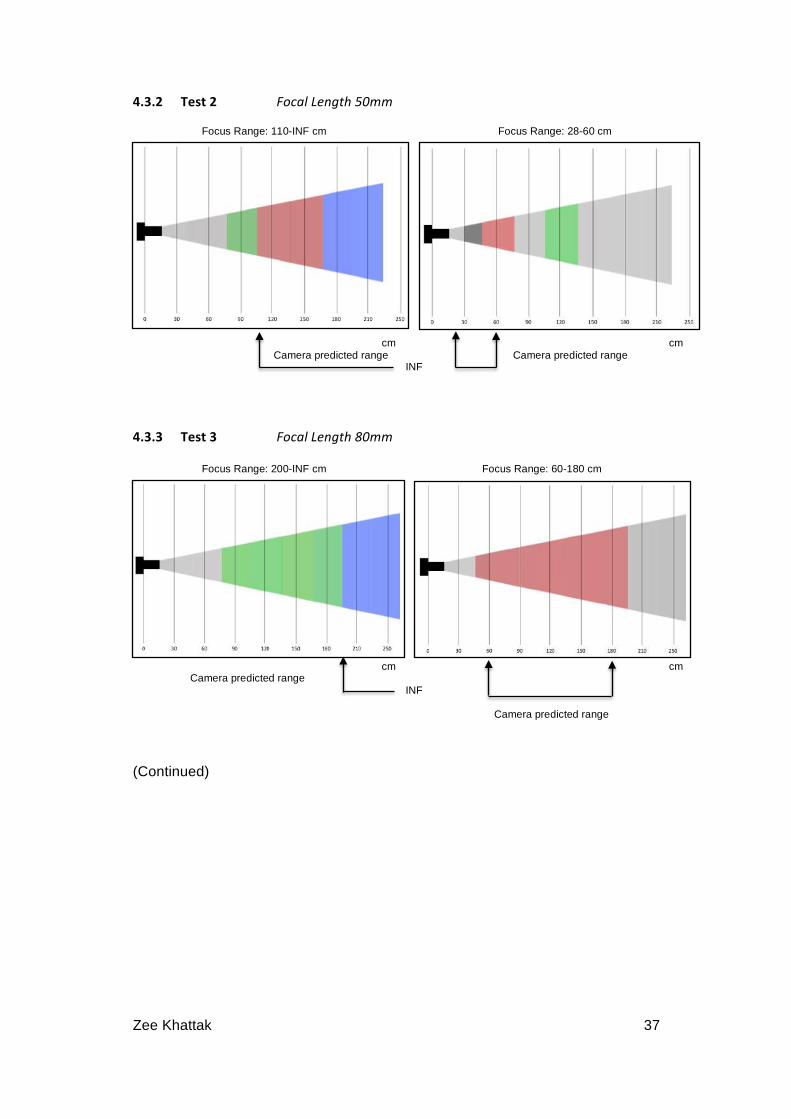
4.3.2 Test 2 Focal Length 50mm
4.3.3 Test 3 Focal Length 80mm
(Continued)
Focus Range: 110-INF cm
cm cm
Focus Range: 28-60 cm
cm
Focus Range: 200-INF cm
cm
Focus Range: 60-180 cm
INF Camera predicted range Camera predicted range
Camera predicted range
Camera predicted range
INF
Zee Khattak 38
5 Discussion
5.1 Interpreting the Results
5.1.1 Test 1
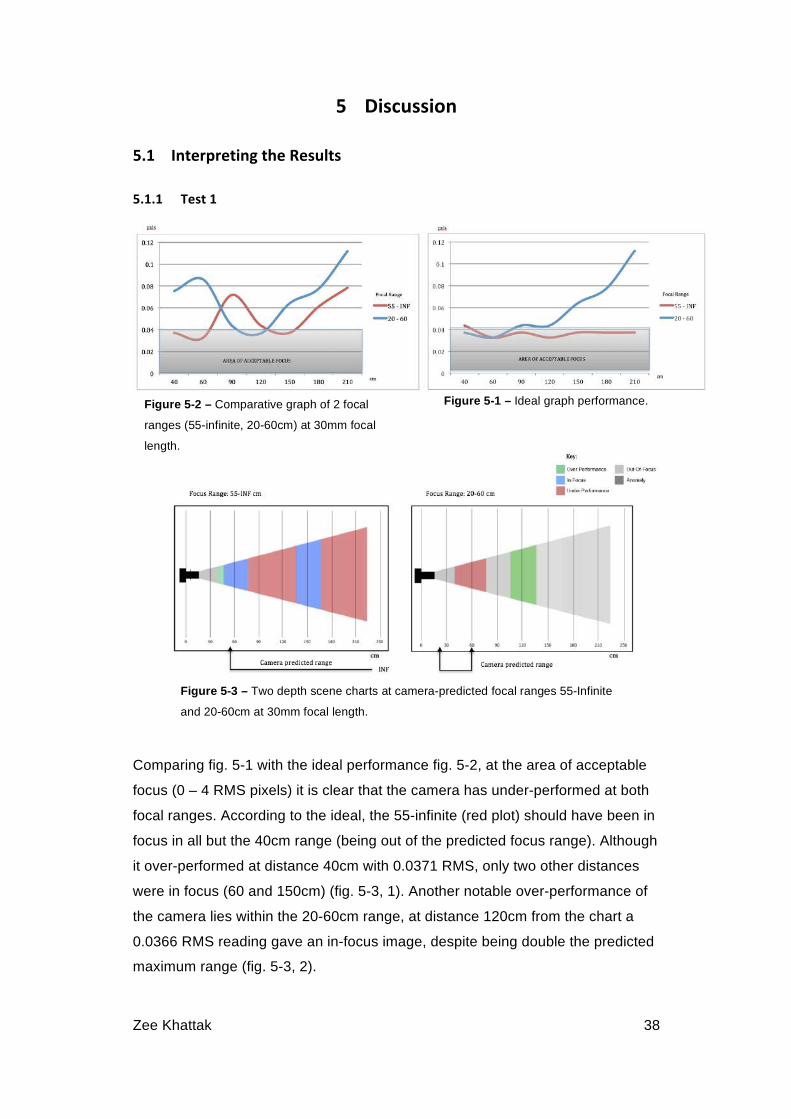
Comparing fig. 5-1 with the ideal performance fig. 5-2, at the area of acceptable
focus (0 – 4 RMS pixels) it is clear that the camera has under-performed at both
focal ranges. According to the ideal, the 55-infinite (red plot) should have been in
focus in all but the 40cm range (being out of the predicted focus range). Although
it over-performed at distance 40cm with 0.0371 RMS, only two other distances
were in focus (60 and 150cm) (fig. 5-3, 1). Another notable over-performance of
the camera lies within the 20-60cm range, at distance 120cm from the chart a
0.0366 RMS reading gave an in-focus image, despite being double the predicted
maximum range (fig. 5-3, 2).
Figure 5-2 – Comparative graph of 2 focal
ranges (55-infinite, 20-60cm) at 30mm focal
length.
Figure 5-1 – Ideal graph performance.
Figure 5-3 – Two depth scene charts at camera-predicted focal ranges 55-Infinite
and 20-60cm at 30mm focal length.
Zee Khattak 39
Comparing the first chart to the second it is not clear whether as the optimal
focus distance is decreased, the refocusing range decreases; the first chart
contains a minimum in-focus image at 40cm and a maximum at 150cm, however
the second has an unexpected single in-focus image at 120cm. This makes it
difficult to settle the hypothesis that closer focus distances decreases the
refocusing range, despite the in-camera guide showing this to be the case.
5.1.2 Test 2
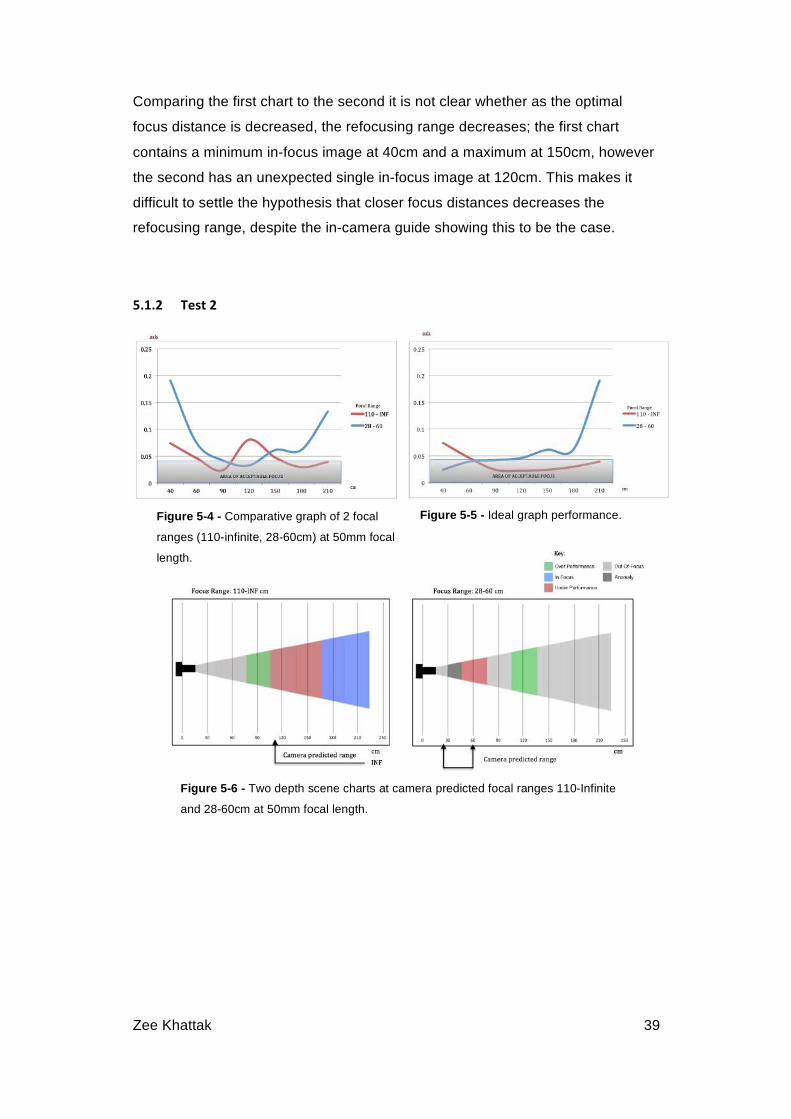
Figure 5-4 - Comparative graph of 2 focal
ranges (110-infinite, 28-60cm) at 50mm focal
length.
Figure 5-5 - Ideal graph performance.
Figure 5-6 - Two depth scene charts at camera predicted focal ranges 110-Infinite
and 28-60cm at 50mm focal length.

Zee Khattak 40
Test 2 also displays a mixture of over-performance and under-performance of the
image resolution, this time with more as-predicted results at the focus range 110-
infinite (blue bands, fig. 5-6, 1). The graphs again display a notable change from
the ideal, particularly at the 120-150 region for the 110-infinite range, with
readings of 0.0806 and 0.0474 RMS; out-of-focus despite being within the
predicted region (fig. 5-4). The 28-60cm focal range; evidently narrowing from the
20-60cm range of Test 1 as the focal length increased, again saw over-
performance at the 120cm distance (fig. 5-6, 2). One anomaly occurred at the
object distance 40cm for range 28-60cm; the image was expected to be in-focus,
however a large RMS reading of 0.191 was present. Although the image
appeared subjectively sharp, on inspecting the region it was decided that the
results were inaccurate as Imatest was measuring the roughness of the paper
and print quality over the performance of the lens (fig. 5-7) (“Using SFR Part 1:
Setting Up and Photographing SFR Test Charts,” 2015).
Figure 5-7 – Details of the anomaly: having a combination of low
distance/ high focal length the jagged details of the paper/ print
quality were incorrectly analysed in Imatest (“Using SFR Part 1:
Setting Up and Photographing SFR Test Charts,” 2015).
Zee Khattak 41
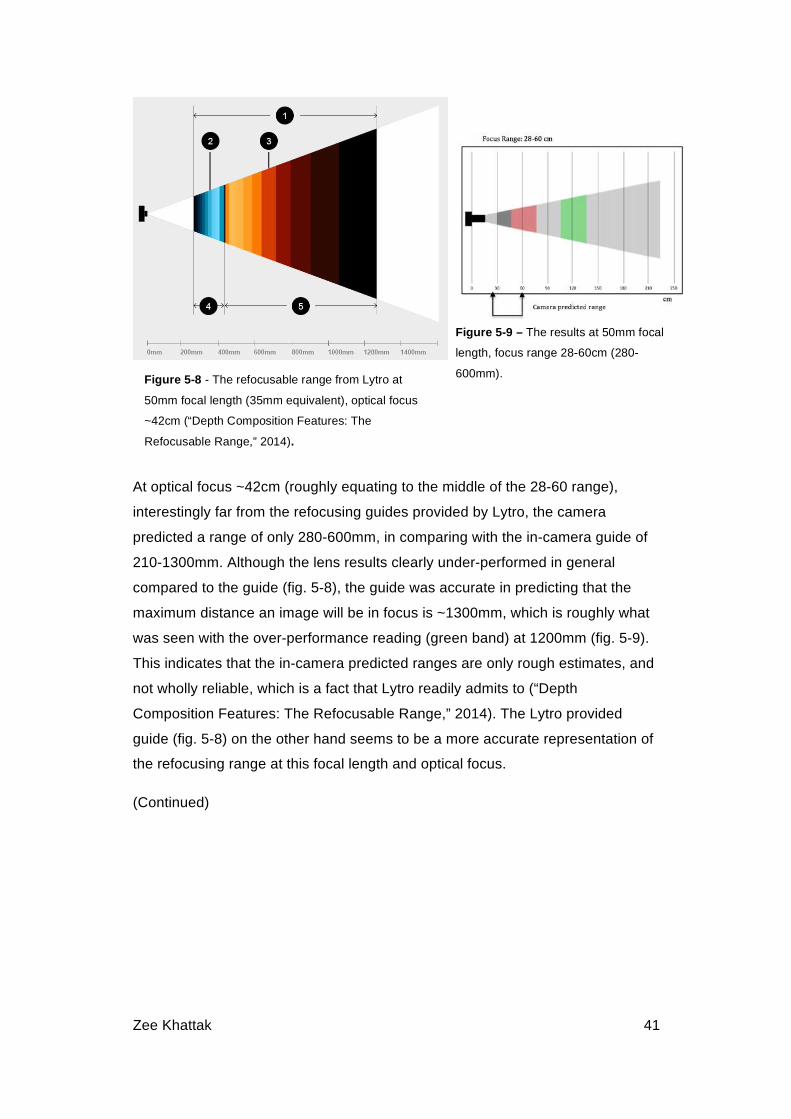
At optical focus ~42cm (roughly equating to the middle of the 28-60 range),
interestingly far from the refocusing guides provided by Lytro, the camera
predicted a range of only 280-600mm, in comparing with the in-camera guide of
210-1300mm. Although the lens results clearly under-performed in general
compared to the guide (fig. 5-8), the guide was accurate in predicting that the
maximum distance an image will be in focus is ~1300mm, which is roughly what
was seen with the over-performance reading (green band) at 1200mm (fig. 5-9).
This indicates that the in-camera predicted ranges are only rough estimates, and
not wholly reliable, which is a fact that Lytro readily admits to (“Depth
Composition Features: The Refocusable Range,” 2014). The Lytro provided
guide (fig. 5-8) on the other hand seems to be a more accurate representation of
the refocusing range at this focal length and optical focus.
(Continued)
Figure 5-8 - The refocusable range from Lytro at
50mm focal length (35mm equivalent), optical focus
~42cm (“Depth Composition Features: The
Refocusable Range,” 2014).
Figure 5-9 – The results at 50mm focal
length, focus range 28-60cm (280-
600mm).
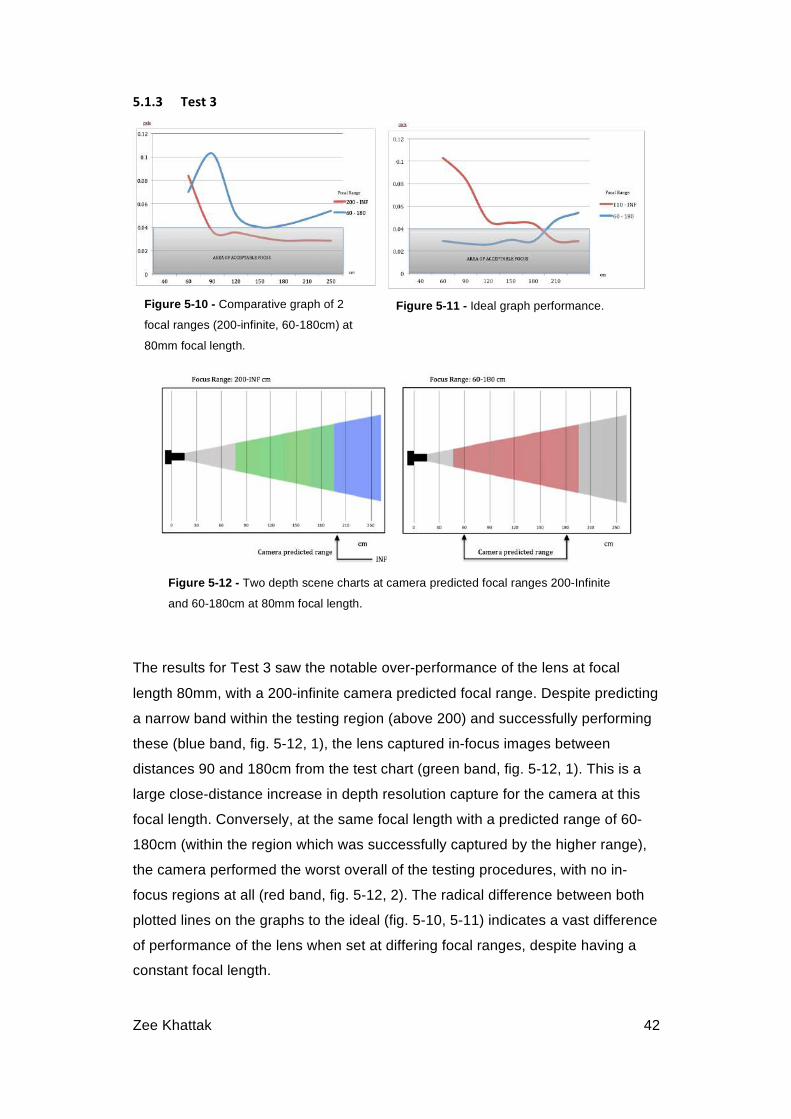
Zee Khattak 42
5.1.3 Test 3
The results for Test 3 saw the notable over-performance of the lens at focal
length 80mm, with a 200-infinite camera predicted focal range. Despite predicting
a narrow band within the testing region (above 200) and successfully performing
these (blue band, fig. 5-12, 1), the lens captured in-focus images between
distances 90 and 180cm from the test chart (green band, fig. 5-12, 1). This is a
large close-distance increase in depth resolution capture for the camera at this
focal length. Conversely, at the same focal length with a predicted range of 60-
180cm (within the region which was successfully captured by the higher range),
the camera performed the worst overall of the testing procedures, with no in-
focus regions at all (red band, fig. 5-12, 2). The radical difference between both
plotted lines on the graphs to the ideal (fig. 5-10, 5-11) indicates a vast difference
of performance of the lens when set at differing focal ranges, despite having a
constant focal length.
Figure 5-10 - Comparative graph of 2
focal ranges (200-infinite, 60-180cm) at
80mm focal length.
Figure 5-11 - Ideal graph performance.
Figure 5-12 - Two depth scene charts at camera predicted focal ranges 200-Infinite
and 60-180cm at 80mm focal length.
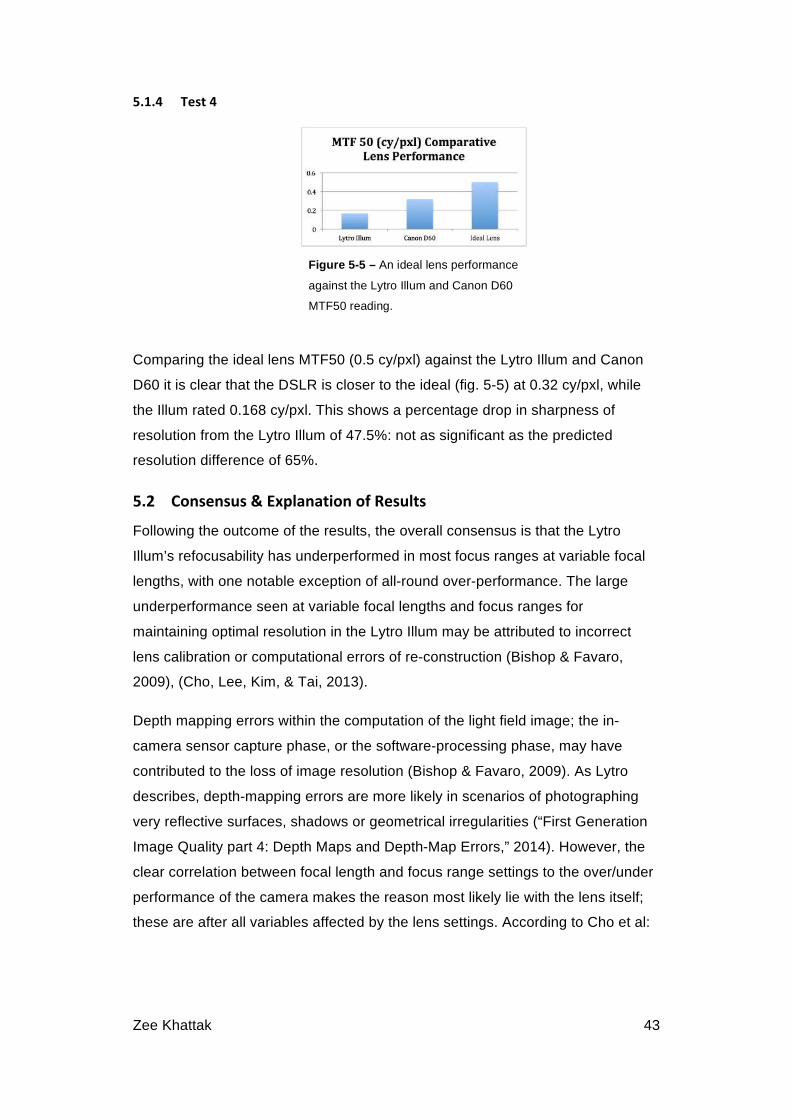
Zee Khattak 43
5.1.4 Test 4
Comparing the ideal lens MTF50 (0.5 cy/pxl) against the Lytro Illum and Canon
D60 it is clear that the DSLR is closer to the ideal (fig. 5-5) at 0.32 cy/pxl, while
the Illum rated 0.168 cy/pxl. This shows a percentage drop in sharpness of
resolution from the Lytro Illum of 47.5%: not as significant as the predicted
resolution difference of 65%.
5.2 Consensus & Explanation of Results
Following the outcome of the results, the overall consensus is that the Lytro
Illum’s refocusability has underperformed in most focus ranges at variable focal
lengths, with one notable exception of all-round over-performance. The large
underperformance seen at variable focal lengths and focus ranges for
maintaining optimal resolution in the Lytro Illum may be attributed to incorrect
lens calibration or computational errors of re-construction (Bishop & Favaro,
2009), (Cho, Lee, Kim, & Tai, 2013).
Depth mapping errors within the computation of the light field image; the in-
camera sensor capture phase, or the software-processing phase, may have
contributed to the loss of image resolution (Bishop & Favaro, 2009). As Lytro
describes, depth-mapping errors are more likely in scenarios of photographing
very reflective surfaces, shadows or geometrical irregularities (“First Generation
Image Quality part 4: Depth Maps and Depth-Map Errors,” 2014). However, the
clear correlation between focal length and focus range settings to the over/under
performance of the camera makes the reason most likely lie with the lens itself;
these are after all variables affected by the lens settings. According to Cho et al:
Figure 5-5 – An ideal lens performance
against the Lytro Illum and Canon D60
MTF50 reading.
Zee Khattak 44
Due to manufacturing defection, it is common to have a micro-lens
array that does not perfectly align with image sensor coordinates.
(Cho et al., 2013, p.1).
An error in the microlens calibration may be the most comprehensive explanation
as to why the lens performance vastly differed at one focal point and focus range
over others.
With the lens calibration the issue that affected the optimal resolution
performance of this particular camera, it is therefore not possible to suggest an
ideal focal length or focus range scenario for in-field photographers; each lens is
likely to be calibrated differently. It does however draw attention to the
importance of careful microlens tuning to the sensor (Tellman, 2003); wrong
calibration can vastly affect the quality of the light field images, and the user’s
experience of the camera.
According to the test results of this project, companies looking to invest in the
research and development of plenoptic camera technology should be wary of the
sensitivity of the lens system to calibration errors. It is within reason that the
particular camera tested was defective and that this is a rare occurrence,
however it is generally seen that the consensus of professional and casual
photographers alike consider light field images to frequently experience problems
affecting viewing resolution (Northrup, 2015), which makes this appear a more
prevalent issue.
The chief media scientist at Dalet Digital Media Systems, Bruce Devlin was
interviewed for his opinions on light field images, and whether the company Dalet
has invested or is looking to invest in the technology. His responses provided a
very interesting insight into the media company’s opinions of the new imaging
medium from an industry workflow perspective. The main opinion correlates to
the findings: Dalet doesn’t use light field images in their current products despite
following and finding the technology research intriguing, as it is:
…not quite ready for commercial High Definition or Ultra High
Definition use. We have found that some of the artefacts are not
naturalistic and would not be appropriate for some of the content
that we handle (Devlin, 2015).
Zee Khattak 45
The output resolution of light field images being below the now standardised HD
viewing resolution is therefore what has prevented an established company such
as Dalet from investing in the technology. Although the results indicate the
resolution differences between the Lytro Illum and DSLR are not as significant as
was projected, the percentage difference of resolution is still around 50%; a
sizable decrease.
Additionally, Devlin argues that unpredictable artefacts and distortions from
improperly computed images can make them appear unnatural, especially in
comparison with DSLR images, which we are now conditioned to accept as
everyday (Devlin, 2015). However, Devlin see’s the potential merits of light field
images in its post-production appeal, especially for niche applications such as
difficult to capture news reporting footage or sports events (Devlin, 2015).
(Continued)

Zee Khattak 46
6 Conclusions
6.1 Overall Findings
Contrary to the first hypotheses that the resolution would be consistent within the
focal ranges and gradually deteriorate outside of these distances; that an
increased focal length will decrease the refocusing range, the results seem to be
mixed to offer no real correlation between focal length and the acceptable
refocusable range of the camera. Considering the hypothesis that as the
camera’s focus distance is decreased, the refocusable range increases, the in-
camera depth guide confirms this prediction (Anon, 2014). However, the sparse
results of over/under-performance throughout the tests make this difficult to
confirm.
The large over-performance of the lens at focal length 80mm with the focus
predicted to be within the 200 – Infinite range, with a significant under-
performance of the lens at the same focal length, focus range 60-180cm
questions the reliability of the camera to offer the user images of consistent,
optimal resolution in-field. Although Lytro claims that the in-camera focus range
offers the user a shooting guide only (“Depth Composition Features: The
Refocusable Range,” 2014), nonetheless the all-round underperformance of the
latter to offer even a single in-focus image indicates this to be a microlens
calibration error (Cho et al., 2013). The Lytro-provided depth guide chart at
50mm focal lens and ~42cm optical focus however did prove somewhat more
realistic then the in-camera guide.
The percentage drop in sharpness resolution between the Lytro Illum and Canon
D60 of 47.5% is not as significant as the predicted 65% resolution difference, as
acquired from the 4:11 output megapixel ratio (Crisp, 2014). This result has
nonetheless demonstrated the limitations of the spatial resolution of the plenoptic
camera, which result from the spatial-angular resolution trade-off from using
microlens array technology (Georgeiv et al., 2006).
6.2 Reflection
The main philosophy behind plenoptic cameras and light field photography is to
never have to worry about taking an out-of-focus image again (Ng, 2006).
However, if the very resolution of the images are compromised under controlled
testing labs due to an error in the lens calibration as seen in the results of this
Zee Khattak 47
project, it is very likely that in-field photographers will experience consistently
less-then-desirable photographs with low resolution and blurriness. The testing
procedures have proven the spatial resolution limitations of the light field camera
compared with a DSLR, but also the unreliability of the camera to perform at its
optimal resolution at varying focal lengths and focus ranges.
Taking the Lytro Illum out into the field (see appendices), the resolution
limitations often became apparent; especially in low-light situations. However, the
advancements in megapixel capabilities shown in Adobe’s plenoptic cameras
seem to indicate an advancing technology that may one day have a strong
competitive edge over diffraction-limited DSLRs (Milanfar, 2010), (Salesin &
Georgiev, 2011). It is the experience of using plenoptic technology that sets it
apart from any other form of photography or video technology; being able to
change the distance-of-focus of a photograph essentially re-invents the rules for
traditional concepts of composition, as the viewer can be self-guided through
multiple points of interest and parallax changes (Harris, 2012). Computational
photography allows the user to make focusing and depth-of-field alterations
within supporting software that would otherwise be impossible, as they seemingly
defy the laws of the physics of light that dictate limits for traditional photographic
means (Northrup, 2015). By capturing large amounts of light field information for
every picture, future advances in software development will likely stretch the
limits of what is possible in post production photography, while fixing existing
processing errors such as depth-mapping problems (Tellman, 2003).
It is for these reasons, and considering the relative immaturity of the technology
at this present age, that it is believed plenoptic camera technology, or at least it’s
unique capabilities will one day be common amongst professional and
nonprofessional photographer’s alike. Whether this technology will become a
hybrid with current DSLRs (Boominathan et al., 2014), make a significant move
into light field capturing video (Wilburn, 2001), or be replaced by competing
depth-capturing hardware and software (Hession, 2014) is yet to be seen.
Zee Khattak 48
7 Recommendations for Further Work As seen in section 3.7 discussing alternative considered methodologies, further
work could be undergone using a similar method of sharpness resolution seen in
this project: this time using a fixed number of distances in the testing procedure,
which may have limited the results. Using a fixed distance firstly at 40cm from the
chart, the camera’s focal length can be aligned to fit the chart optimally within the
frame; increasing the number of useable figures (including the Edge Profile and
MTF 50 reading) acquired by the software Imatest. The focal length is then noted
and multiple images are taken at variable optimal focus points in the frame. The
camera’s distance is then changed; this time requiring a longer focal length to fit
the chart optimally within the frame; the test procedure is repeated a number of
times. Opening the images in Lytro Desktop, the composite depth images that
make up a single light field file can be exported as separate TIFF files for
comparative resolution analysis in Imatest; the combination of which displays the
depth resolution characteristics for each image. Although a lengthy procedure, it
is hypothesised that this would be a reliable alternative means of analysing the
depth resolution captured by the camera. Limitations to this method include the
fact that a consistent focal length in comparison with changing distances from the
object cannot be measured, as was the premise of this project’s testing scheme.
Furthermore, resolution testing could be devised for overcoming the minimum
and maximum distance set for the project’s procedure; testing the macro and
long-distance refocusing capabilities of the camera would require different testing
schemes altogether to photographing resolution charts.
(Continued)
Zee Khattak 49
8 References
Adelson, E.H. & Bergen, J.R., 1991. The Plenoptic Function and the Elements of Early Vision. In M. Landy & J. A. Movshon, eds. Computational Models of Visual Processing. Cambridge: MIT Press, pp. 3–20.
Allen, E. & Triantaphillidou, S. eds., 2011. The Manual of Photography 10th ed., Oxford: Taylor & Francis.
Andrews, P. et al., 2006. Raw Workflow from Capture to Archives: A Complete Digital Photographer’s Guide to Raw Imaging, Oxford: Focal Press.
Anon, 2012. 3D integral image. Howseography. Available at: https://www.youtube.com/watch?v=lVgy1X5gkII [Accessed December 12, 2014].
Anon, 2015a. Composing for Depth, America: Lytro Inc. Available at: https://www.lytro.com/learn/videos/composing-for-depth.php.
Anon, 2015b. Connecting Depth to Living Pictures, America: Lytro Inc. Available at: https://www.lytro.com/learn/videos/connecting-depth-to-living-pictures.php.
Anon, 2014a. Depth Composition Features: The Refocusable Range. Available at: http://manuals.lytro.com/illum/depth-composition-features/ [Accessed April 4, 2015].
Anon, 2015c. Diffraction Limited Photography: Pixel Size, Aperture and Airy Disks. Cambridge in Colour. Available at: http://www.cambridgeincolour.com/tutorials/diffraction-photography.htm [Accessed January 20, 2015].
Anon, 2014b. First Generation Image Quality part 4: Depth Maps and Depth-Map Errors. Lytro Inc. Available at: https://support.lytro.com/hc/en-us/articles/200865170-First-Generation-Image-Quality-part-4-Depth-Maps-and-Depth-Map-Errors [Accessed April 10, 2015].
Anon, 2014c. Image Quality Factors - Imatest Documents. Imatest, p.13. Available at: http://www.imatest.com/docs/iqfactors/#sharpness [Accessed January 7, 2015].
Anon, 2015d. SFR - Imatest Modules. Imatest. Available at: http://www.imatest.com/support/modules/sfr/ [Accessed April 6, 2015].
Anon, 2015e. SFR results : Edge and MTF (Sharpness) Plot. Imatest, p.6. Available at: http://www.imatest.com/docs/sfr_mtfplot/ [Accessed April 1, 2015].
Anon, 2015f. Using SFR Part 1: Setting Up and Photographing SFR Test Charts. Imatest. Available at: http://www.imatest.com/docs/sfr_instructions/ [Accessed April 4, 2015].
Anon, 2015g. Using SFRplus Part 3: Imatest SFR Plus Results. Imatest, p.18. Available at: http://www.imatest.com/docs/sfrplus_instructions3/#edgerough [Accessed April 1, 2015].
Anon, J., 2014. Using LYTRO ILLUM: A Guide to Creating Great Living Pictures, San Francisco: Josh Anon.
Benton, S.A. & Bove, V.M., 2008. Holographic Imaging, Hoboken: John Wiley & Sons.
Bertalmío, M., 2014. Image Processing for Cinema, Boca Raton: CRC Press.
Zee Khattak 50
Besiex, Q. von, 2012. Lytro Alternative: Automatic, Intelligent Focus Bracketing. Quinxy. Available at: http://quinxy.com/technology/lytro-alternative-automatic-focus-bracketing/ [Accessed March 22, 2015].
Bilissi, E. & Langford, M., 2013. Langford’s Advanced Photography, London: CRC Press.
Bishop, T.E. & Favaro, P., 2009. Plenoptic Depth Estimation From Multiple Aliased Views. IEEE 12th International Conference on Computer Vision Workshops (ICCV Workshops), pp.1622 – 1629.
Boominathan, V., Mitra, K. & Veeraraghavan, A., 2014. Improving resolution and depth-of-field of light field cameras using a hybrid imaging system. 2014 IEEE International Conference on Computational Photography (ICCP), (3), pp.1–10.
Brown, B., 2014. The Filmmaker’s Guide to Digital Imaging: For Cinematographers, Digital Imaging Technicians, and Camera Assistants, London: CRC Press.
Cho, D. et al., 2013. Modeling the Calibration Pipeline of the Lytro Camera for High Quality Light-Field Image Reconstruction. Proceedings of the IEEE International Conference on Computer Vision, pp.3280–3287.
Crisp, S., 2014. Lytro Reveals the Professional-Grade Illum Light Field Camera. Gizmag. Available at: http://www.gizmag.com/lytro-illum-light-field-camera/31742/ [Accessed March 22, 2015].
Cristobal, G., Schelkens, P. & Thienpont, H. eds., 2013. Optical and Digital Image Processing: Fundamentals and Applications, Hoboken: John Wiley & Sons. Available at: https://books.google.com/books?id=upooPUQLIA0C&pgis=1 [Accessed December 12, 2014].
Daly, D., 2000. Microlens Arrays, London: CRC Press.
Devlin, B., 2015. Email-interviewed by Zee Khattak, April 10.
Dillard, T., 2008. Raw Pipeline: Revolutionary Techniques to Streamline Digital Photo Workflow, New York: Lark Books.
Elkins, D.E., 2013. The Camera Assistant’s Manual 5th ed., Oxford: Taylor & Francis.
Fatahalian, K., 2011. Lecture 19 : Depth Cameras Continuing theme : Computational Photography. Graphics and Imaging Architectures, (Fall), p.30.
Galstian, T. V., 2013. Smart Mini-Cameras, Boca Raton: CRC Press.
Georgeiv, T. et al., 2006. Spatio-Angular Resolution Tradeoff in Integral Photography. Eurographics Symposium on Rendering, p.10.
Georgiev, T. & Lumsdaine, A., 2009. Depth of Field in Plenoptic Cameras. Eurographics, (1), pp.5–8.
Goldstein, D.B., 2009. Physical Limits in Digital Photography. Northlight Images. Available at: http://www.northlight-images.co.uk/article_pages/guest/physical_limits_long.html [Accessed March 25, 2015].
Zee Khattak 51
Harris, M., 2012. Light-Field Photography Revolutionizes Imaging. IEEE Spectrum. Available at: http://spectrum.ieee.org/consumer-electronics/gadgets/lightfield-photography-revolutionizes-imaging [Accessed April 1, 2015].
Hession, M., 2014. Lytro ’s Light Field Tech Is Amazing, But Is It Already Obsolete? Reframe, p.2. Available at: http://reframe.gizmodo.com/lytros-light-field-tech-is-amazing-but-is-it-already-o-1566058802 [Accessed October 25, 2014].
Hirsch, R., 2013. Exploring Color Photography Fifth Edition: From Film to Pixels, Oxford: Taylor & Francis.
Hirsch, R., 2012. Light and Lens: Photography in the Digital Age 2nd ed., Oxon: CRC Press.
Ippolito, J.A., 2003. Understanding Digital Photography, New York: Cengage Learning.
Jarabo, A. et al., 2012. How Do People Edit Light Fields?, Rome.
Javidi, B. & Okano, F. eds., 2002. Three-Dimensional Television, Video, and Display Technologies, New York: Springer Science & Business Media.
Lee, R., 2014. Review: Do you need a Lytro Illum? Techly. Available at: http://www.techly.com.au/2014/08/19/lytro-illum-tuba/ [Accessed January 20, 2015].
Lezano, D., 2012. The Photography Bible: A Complete Guide for the 21st Century Photographer, Devon: David & Charles.
Lu, W., Mok, W.K. & Neiman, J., 2013. 3D and Image Stitching With the Lytro Light-Field Camera, New York.
Lueder, E., 2011. 3D Displays, Chichester: John Wiley & Sons.
Lukac, R. ed., 2010. Computational Photography: Methods and Applications, Boca Raton: CRC Press.
Lumsdaine, A., 2012. Color Demosaicing in Plenoptic Cameras, California.
Lumsdaine, A. & Georgiev, T., 2009. The Focused Plenoptic Camera, Bloomington; San Jose.
Milanfar, P. ed., 2010. Super-Resolution Imaging, Boca Raton: CRC Press.
Murphy, D.B., 2002. Fundamentals of Light Microscopy and Electronic Imaging, New York: John Wiley & Sons.
Nasse, H.H., 2008. How to Read MTF Curves. Carl Zeiss - Camera Lens Division, (December), p.33.
Ng, R., 2006. Digital Light Field Photography. Stanford University.
Ng, R. et al., 2005. Light Field Photography with a Hand-held Plenoptic Camera, Stanford. Available at: http://www.eng.tau.ac.il/~ipapps/Supplement/[ 2005 ] Light Field Photography with a Hand-held Plenoptic Camera.pdf.
Northrup, T., 2015. Lytro Illum Review, America: Chelsea & Tony. Available at: https://www.youtube.com/watch?v=0JbERFPWNyU.
Zee Khattak 52
Patel, N., 2012. Reverse Engineering the Lytro .LFP File Format. Eclecticc. Available at: http://eclecti.cc/computervision/reverse-engineering-the-lytro-lfp-file-format [Accessed December 16, 2014].
Pereira, D., 2011. The Art of HDR Photography, David Pereira.
Peres, M.R. ed., 2013. The Focal Encyclopedia of Photography 4th ed., Oxford: Taylor & Francis.
Perwaß, C., Wietzke, L. & Gmbh, R., 2012. Single Lens 3D-Camera with Extended Depth-of-Field. Proceedings of SPIE, 49(431), p.15. Available at: http://link.aip.org/link/PSISDG/v8291/i1/p829108/s1&Agg=doi.
Poon, T.-C., 2006. Digital Holography and Three-Dimensional Display: Principles and Applications, New York: Springer Science & Business Media.
Reichmann, M., 2009. MTF. Luminous Landscape, p.5. Available at: http://luminous-landscape.com/mtf/ [Accessed March 3, 2015].
Richardson, M., 2013. Techniques and Principles in Three-Dimensional Imaging: An Introductory Approach, Pennsylvania: IGI Global.
Roland, J., 2015. A Study of Slanted-Edge MTF Stability and Repeatability, America: Imatest LLC. Available at: https://www.youtube.com/watch?v=e2V2kS9_L1w [Accessed January 21, 2015].
Salesin, D. & Georgiev, T., 2011. GPU Technology Conference: Adobe Shows off Plenoptic Lenses, USA: Adobe.
Salomon, D., Motta, G. & Bryant, D., 2007. Data Compression: The Complete Reference 4th ed., London: Springer Science & Business Media.
Savov, V., 2010. Adobe Shows off Plenoptic Lenses that Let You Refocus an Image After It’s Taken. Engadget. Available at: http://www.engadget.com/2010/09/23/adobe-shows-off-plenoptic-lenses-that-let-you-refocus-an-image-a/ [Accessed March 22, 2015].
Son, J.Y. et al., 2008. Image-Forming Principle of Integral Photography. IEEE/OSA Journal of Display Technology, 4(3), pp.324–331.
Story, D., 2008. The Digital Photography Companion, Massachusetts: O’Reilly Media, Inc.
Sumner, R., 2014. Processing RAW Images in MATLAB. , pp.1–15.
Tao, M.W. et al., 2013. Depth from Combining Defocus and Correspondence Using Light-Field Cameras. 2013 IEEE International Conference on Computer Vision, 2, pp.673–680.
Taylor, D., 2012. Understanding RAW Photography, London: Ammonite Press.
Tellman, S., 2003. Lytro, Light Fields, and The Future of Photography, America: Lytro Inc.
Theobalt, C., Koch, R. & Kolb, A., 2013. Time-of-Flight and Depth Imaging. Sensors, Algorithms, and Applications : Dagstuhl 2012 Seminar on Time-of-Flight Imaging and GCPR 2013 Workshop on Imaging New Modalities, Berlin: Springer.
Vaish, V. & Adams, A., 2008. The (New) Stanford Light Field Archive. Stanford. Available at: http://lightfield.stanford.edu/lfs.html [Accessed December 14, 2014].
Zee Khattak 53
Wang, T., 2014. Lytro Illum Camera Hands On. Available at: https://www.youtube.com/watch?v=CECoSeL79Wc [Accessed March 16, 2015].
Weston, C. & Coe, C., 2013. Creative DSLR Photography: The Ultimate Creative Workflow Guide, Oxford: CRC Press.
Wetzstein, G. et al., 2011. Computational Plenoptic Imaging. Computer Graphics Forum, 30(8), pp.2397–2426.
Wilburn, B.S., 2001. Light Field Video Camera, California.
Williams, E.A. et al. eds., 2007. National Association of Broadcasters Engineering Handbook 10th ed., Oxford: Taylor & Francis.
Zhang, C. & Chen, T., 2006. Light Field Sampling, San Rafael: Morgan & Claypool Publishers.
9 Bibliography
Anon, 2012. A Guide to Smoother Digital Workflows in Television. The Digital Production Partnership. Available at: https://aapt.com.au/sites/default/files/pdf/DPP_Bloodless_Revolution.pdf [Accessed March 1, 2015].
Anon, 2015. Camera Lens Quality: MTF, Resolution & Contrast. Cambridge In Colour, p.7. Available at: http://www.cambridgeincolour.com/tutorials/lens-quality-mtf-resolution.htm [Accessed March 25, 2015].
Cardinal, D., 2011. Lytro: It’s focusing on the wrong problem. Extreme Tech. Available at: http://www.extremetech.com/extreme/101489-lytro-its-focusing-on-the-wrong-problem [Accessed March 17, 2015].
Chellappa, R. & Theodoridis, S., 2013. Academic Press Library in Signal Processing: Image, Video Processing and Analysis, Hardware, Audio, Acoustic and Speech Processing, Oxford: Academic Press.
Chen, H.H., 2009. Research on Light Field Camera and Music Emotion Recognition. 2009 IEEE International Conference on Multimedia and Expo, pp.1558–1559.
Choudhury, B., Singla, D. & Chandran, S., 2006. Real-Time Camera Walks Using Light Fields. Computer Vision, Graphics and Image Processing, 1, pp.321–332.
Drazic, V., 2010. Optimal depth resolution in plenoptic imaging. 2010 IEEE International Conference on Multimedia and Expo, ICME 2010, pp.1588–1593.
Georgiev, T. et al., 2013. Lytro Camera Technology: Theory, Algorithms, Performance Analysis C. G. M. Snoek et al., eds. , 5(1), p.10.
Georgiev, T. & Lumsdaine, A., 2009a. Depth of Field in Plenoptic Cameras. Eurographics, (1), pp.5–8.
Georgiev, T. & Lumsdaine, A., 2009b. Superresolution with Plenoptic Camera 2.0. Adobe Systems Incorporated, Tech. Rep, 2009(April), pp.1–9.
Zee Khattak 54
Georgiev, T. & Lumsdaine, A., 2012. The Multi-Focus Plenoptic Camera,
Georgiev, T.G., 2012. New Light Field Camera Designs,
Hainich, R.R., 2009. The End of Hardware, 3rd Edition: Augmented Reality and Beyond, South Carolina: Booksurge.
Han, H., Kang, M. & Sohn, K., 2010. Lens Simulation with Light Field Camera. Digest of Technical Papers International Conference on Consumer Electronics (ICCE), pp.355–356.
Kamal, M.H., Golbabaee, M. & Vandergheynst, P., 2012. Light Field Compressive Sensing in Camera Arrays. 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pp.5413–5416.
Keelan, B., 2002. Handbook of Image Quality: Characterization and Prediction, New York: CRC Press.
Li, S., Liu, C. & Wang, Y. eds., 2014. Pattern Recognition: 6th Chinese Conference, CCPR 2014, Changsha, China, November 17-19, 2014. Proceedings, Part 2, Berlin: Springer.
Lister, M. ed., 2013. The Photographic Image in Digital Culture, Oxon: Taylor & Francis.
Lu, W., Mok, W.K. & Neiman, J., 2013. 3D and Image Stitching With the Lytro Light-Field Camera, New York.
Masia, B., Jarabo, A. & Gutierrez, D., 2005. Favored Workflows in Light Field Editing, Zaragoza.
McAndrew, A., Wang, J.H. & Tseng, C.S., 2010. Introduction to Digital Image Processing with MATLAB, Singapore: Cengage Learning Asia Pte Limited.
Ng, R., 2011. Inside the Lytro Camera, and the Start-up’s 3D Future. Smart Planet. Available at: https://www.youtube.com/watch?v=FH57z_goJ9U [Accessed March 16, 2015].
Pizzi, S. & Jones, G., 2014. A Broadcast Engineering Tutorial for Non-Engineers, Boca Raton: CRC Press.
Raghavendra, R. et al., 2013. Multi-face Recognition at a Distance Using Light-Field Camera. 2013 Ninth International Conference on Intelligent Information Hiding and Multimedia Signal Processing, (1), pp.346–349.
Raskar, R. & Tumblin, J., 2014. Computational Photography: Mastering New Techniques for Lenses, Lighting, and Sensors, Massachusetts: A K Peters, Limited.
Reddy, D., Bai, J. & Ramamoorthi, R., 2013. External Mask Based Depth and Light Field Camera. 2013 IEEE International Conference on Computer Vision Workshops, pp.37–44.
Rouse, A., 2007. Understanding Raw Photography, London: Photographers Institute Press.
Shao, L. ed., 2014. Computer Vision and Machine Learning with RGB-D Sensors, New York: Springer.
Tulyakov, S., Lee, T.H. & Han, H., 2013. Quadratic Formulation of Disparity Estimation Problem for Light-field Camera. 2013 IEEE International Conference on Image Processing, pp.2063–2067.
Zee Khattak 55
Wietzke, L. & Perwass, C., 2011. Raytrix 3D-Focus Cameras 3D-Focus Camera Technology : One Camera, One Lens, One Shot, Kiel.
Wolf, J., 2013. How to Take Apart a Lytro Camera. Jason Wolf Channel. Available at: https://www.youtube.com/watch?v=fSmhJWNI8Dk [Accessed March 16, 2015].
Zubrzycki, J., 2012. Challenges and Solutions in Broadcast Archives. BBC Research and Development, p.38. Available at: http://www.dpconline.org/component/docman/doc_download/581-soundavision-zybrycki [Accessed March 1, 2015].
(Continued)
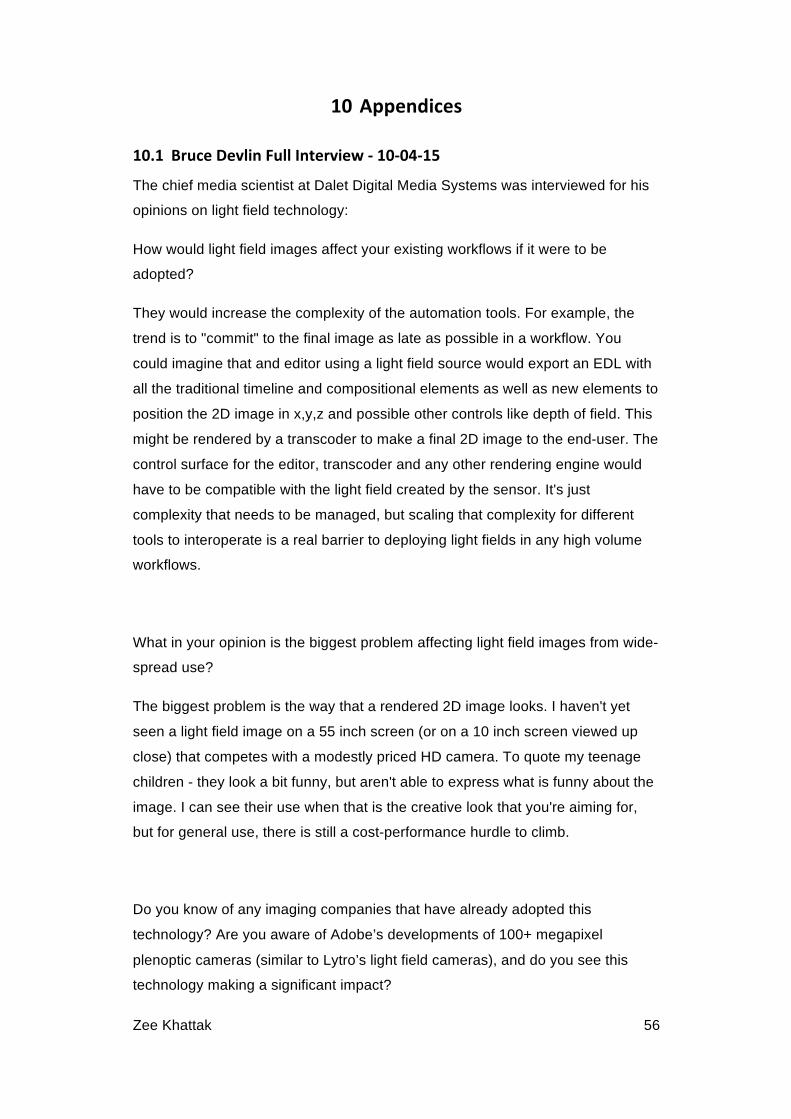
Zee Khattak 56
10 Appendices
10.1 Bruce Devlin Full Interview -‐ 10-‐04-‐15
The chief media scientist at Dalet Digital Media Systems was interviewed for his
opinions on light field technology:
How would light field images affect your existing workflows if it were to be
adopted?
They would increase the complexity of the automation tools. For example, the
trend is to "commit" to the final image as late as possible in a workflow. You
could imagine that and editor using a light field source would export an EDL with
all the traditional timeline and compositional elements as well as new elements to
position the 2D image in x,y,z and possible other controls like depth of field. This
might be rendered by a transcoder to make a final 2D image to the end-user. The
control surface for the editor, transcoder and any other rendering engine would
have to be compatible with the light field created by the sensor. It's just
complexity that needs to be managed, but scaling that complexity for different
tools to interoperate is a real barrier to deploying light fields in any high volume
workflows.
What in your opinion is the biggest problem affecting light field images from wide-
spread use?
The biggest problem is the way that a rendered 2D image looks. I haven't yet
seen a light field image on a 55 inch screen (or on a 10 inch screen viewed up
close) that competes with a modestly priced HD camera. To quote my teenage
children - they look a bit funny, but aren't able to express what is funny about the
image. I can see their use when that is the creative look that you're aiming for,
but for general use, there is still a cost-performance hurdle to climb.
Do you know of any imaging companies that have already adopted this
technology? Are you aware of Adobe’s developments of 100+ megapixel
plenoptic cameras (similar to Lytro’s light field cameras), and do you see this
technology making a significant impact?
Zee Khattak 57
I am aware of research effort but not of any commercial movies, TV shows or
high-volume titles that have adopted this style of shooting.
Do you see the current limitations of the technology being overcome in the future
for widespread use; if so, how long do you expect this to take?
I think the current price-performance limitations could be overcome with sufficient
time and investment, providing there is a "killer application" that will provide the
cash to recoup the investment. Maybe the humble mobile phone is that killer app.
If you have the energy and storage to shoot the "scene" and then figure out what
you wanted to shoot later, then virtually anyone could become a director of
photography. I think we're a few years from that though.
Do you predict that this technology may become a hybrid with existing digital
cameras (DSLRs), or would you expect the DSLRs to remain unaffected?
I think that top-end DSLRs will be unaffected because the Pros and purists use
them as a tool to create a desired effect. I suspect there will be a few specialist
DSLRs at the lower end of the scale to appeal to early adopter so that the "killer
app" has a good chance of appearing.
What did you mean when you described the artefacts as ‘un-naturalistic’; was this
in reference to depth rendering problems of light field images, or general
resolution limitations or both?
Both. We (consumers) have been conditioned to a certain look in our
photography and cinematography over recent years. We naturally correlate the
different distortions and come to expect them (JJ Abrahms lens flare for example
to make Star Trek look real). Watching Lytro clips
(https://www.youtube.com/watch?v=iYtj41s8iZQ) I can see things going on that
don't happen quite as they do in real life - for example the YouTube clip when the
focus is pulled along the railing, the tree on the left looks wrong for reasons I
can't quite explain. Maybe this can all be fixed in post with better simulated lens
physical and more pixels / dynamic range at the input. Today, my old eyes tell me

Zee Khattak 58
that the pictures aren't quite right. Maybe my kids will buy light field cameras and
they will become accustomed to the look and will rebel against the traditional
look.
What in your opinion is the greatest appeal of light field images? How would you
rate them against conventional image formats?
For me the biggest appeal is the "fix it in post" appeal. I can see for difficult
sports, events and special-effects footage that a light field camera of sufficient
resolution, dynamic range and at the right price could capture the story in a way
that would ensure you always go the best results. No more blurred shots of the
unexpected events at the back of the crowd because the light field camera could
have its focus pulled after the fact.
(Continued)
Zee Khattak 59
10.2 Image Test Lab Photographs
Figure 10-1 – Image test lab set up with
lighting.
Figure 10-2 – Measuring tape for distance
measurements.
Figure 10-3 – Lytro Illum front. Figure 10-4 – Lytro Illum side.
Figure 10-5 – Photographing the test
chart.
Figure 10-6 – Logging the results.
Zee Khattak 60
10.3 Dissertation Log Book
06/10/14
Rob
Presented initial ideas for project (see sheet).
He told me that I could push it a lot further – not just comparison. Image
processing, algorithms – above and beyond just pixels, into code.
Image processing software: Leena, Gimp, Lateck, Lumix.
Academic papers – Google scholar.
Take apart cameras – data tests. Not just of existing light field technology – but
can this effect be recreated using just normal digital cameras – how theoretically
can it be made. Adding data.
Contacts: Jerry Foss, Ian Williams, Greg Hough, Sam Smith – work in
conjunction with – tell me where to be looking, what to read up on. Level 1 image
processing research.
08/10/14
Jerry
I mentioned Rob’s suggestion – Jerry said he has heard of someone recreating
the lf file – only works with chrome (he could not remember exactly who).
He suggested taking a PRODUCTION WORKFLOW approach to my project – a
lot of movement in the file-based workflow (based on METADATA). The
capturing process of images/video – everything that occurs in the production
stage.
BBC research + Development – looking into light field cameras.
Metadata + workflow – send Jerry email regarding slides for digital workflow +
slides for contacts list.
Idea to compare and contrast current digital workflows with that of the light field
workflow – eg. a digital camera workflow compared with a lytro.
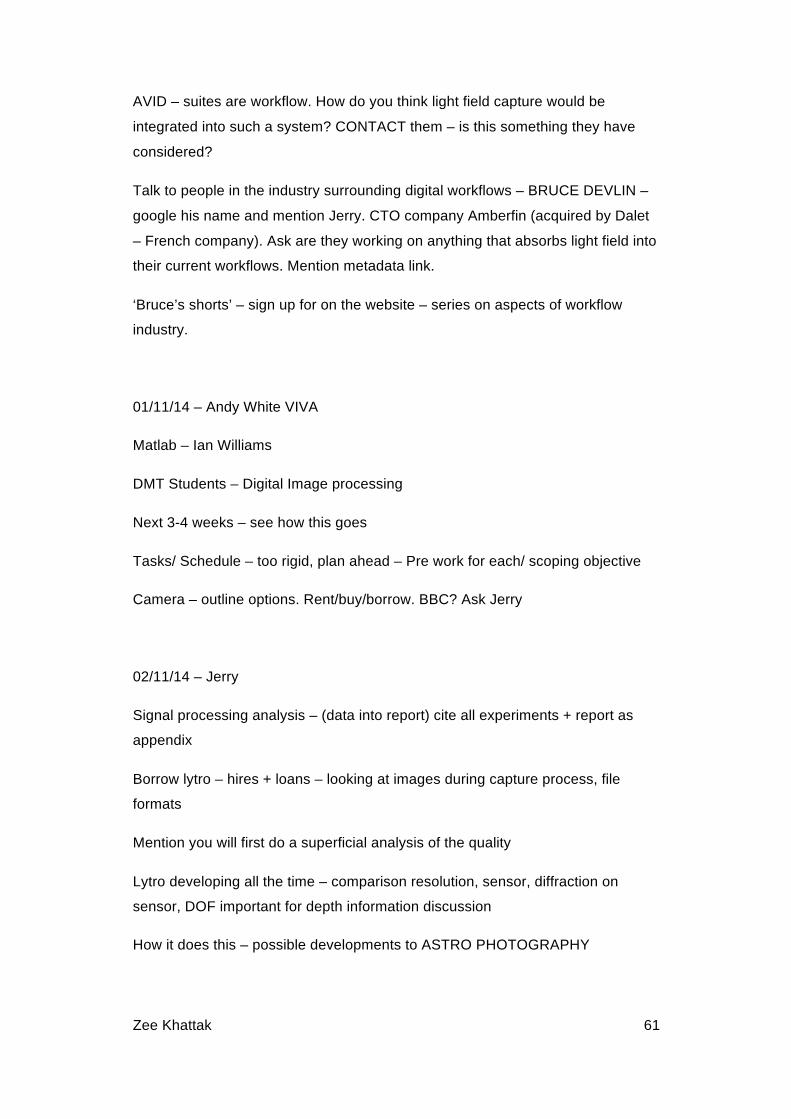
Zee Khattak 61
AVID – suites are workflow. How do you think light field capture would be
integrated into such a system? CONTACT them – is this something they have
considered?
Talk to people in the industry surrounding digital workflows – BRUCE DEVLIN –
google his name and mention Jerry. CTO company Amberfin (acquired by Dalet
– French company). Ask are they working on anything that absorbs light field into
their current workflows. Mention metadata link.
‘Bruce’s shorts’ – sign up for on the website – series on aspects of workflow
industry.
01/11/14 – Andy White VIVA
Matlab – Ian Williams
DMT Students – Digital Image processing
Next 3-4 weeks – see how this goes
Tasks/ Schedule – too rigid, plan ahead – Pre work for each/ scoping objective
Camera – outline options. Rent/buy/borrow. BBC? Ask Jerry
02/11/14 – Jerry
Signal processing analysis – (data into report) cite all experiments + report as
appendix
Borrow lytro – hires + loans – looking at images during capture process, file
formats
Mention you will first do a superficial analysis of the quality
Lytro developing all the time – comparison resolution, sensor, diffraction on
sensor, DOF important for depth information discussion
How it does this – possible developments to ASTRO PHOTOGRAPHY
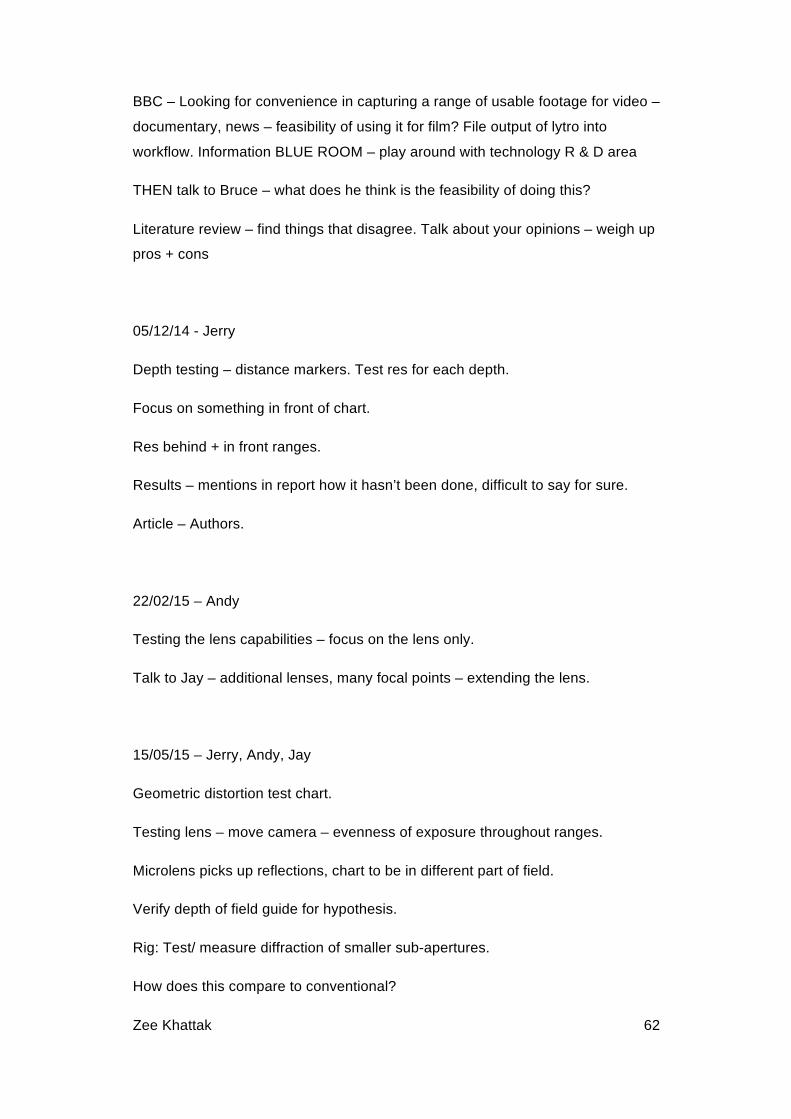
Zee Khattak 62
BBC – Looking for convenience in capturing a range of usable footage for video –
documentary, news – feasibility of using it for film? File output of lytro into
workflow. Information BLUE ROOM – play around with technology R & D area
THEN talk to Bruce – what does he think is the feasibility of doing this?
Literature review – find things that disagree. Talk about your opinions – weigh up
pros + cons
05/12/14 - Jerry
Depth testing – distance markers. Test res for each depth.
Focus on something in front of chart.
Res behind + in front ranges.
Results – mentions in report how it hasn’t been done, difficult to say for sure.
Article – Authors.
22/02/15 – Andy
Testing the lens capabilities – focus on the lens only.
Talk to Jay – additional lenses, many focal points – extending the lens.
15/05/15 – Jerry, Andy, Jay
Geometric distortion test chart.
Testing lens – move camera – evenness of exposure throughout ranges.
Microlens picks up reflections, chart to be in different part of field.
Verify depth of field guide for hypothesis.
Rig: Test/ measure diffraction of smaller sub-apertures.
How does this compare to conventional?
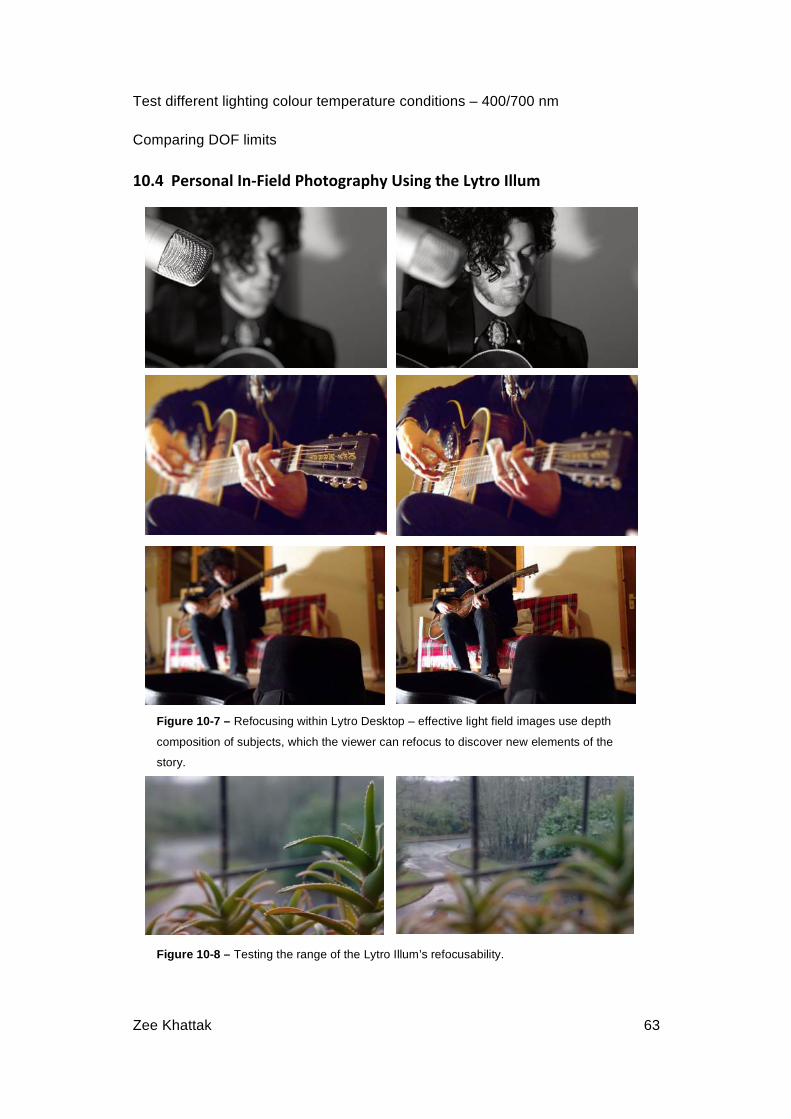
Zee Khattak 63
Test different lighting colour temperature conditions – 400/700 nm
Comparing DOF limits
10.4 Personal In-‐Field Photography Using the Lytro Illum
Figure 10-7 – Refocusing within Lytro Desktop – effective light field images use depth
composition of subjects, which the viewer can refocus to discover new elements of the
story.
Figure 10-8 – Testing the range of the Lytro Illum’s refocusability.
Zee Khattak 64
10.5 Light Field Image Upload & Storage
(Continued)
Figure 10-9 – Depth mapping problems around subject.
Figure 10-10 – Processing must be done for each image during/after uploading to Lytro
Desktop; making it a lengthy process to view the final images on a computer.
Zee Khattak 65
Figure 10-11 – 41.11 GB total for Lytro Desktop
with 389 light field images stored.
Figure 10-12 – Multiple files stored for a single light field capture equalling 130.6 MB.