please switch to ‘slide show’ mode (press f5). this is a presentation by titles a model...
Post on 19-Dec-2015
213 views
TRANSCRIPT

Please switch to ‘slide show’ mode (press F5)

This is a presentation by
A model involving self-assembling modular plants
Roderick Hunt, Ric Colasanti & Andrew AskewUniversity of Sheffield
It is all about
SAM

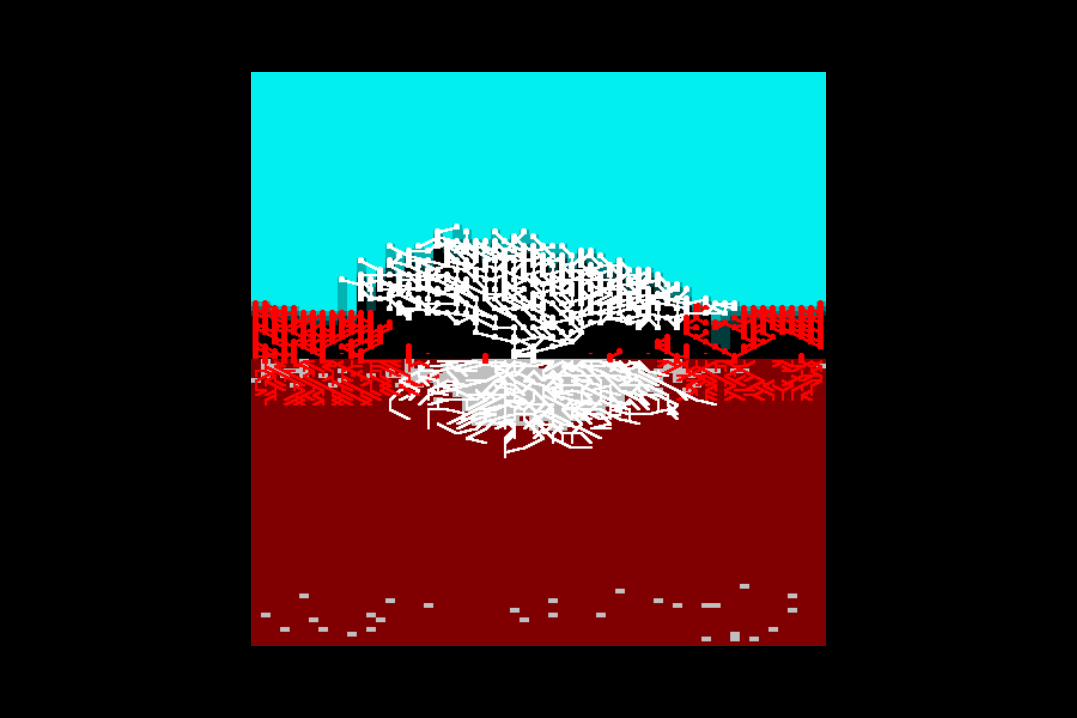
This is what a community of virtual plants looks like
Contrasting tones show patches of resource depletion

This is a single propagule of a virtual plant
It is about to grow in a resource-rich above- and
below-ground environment


















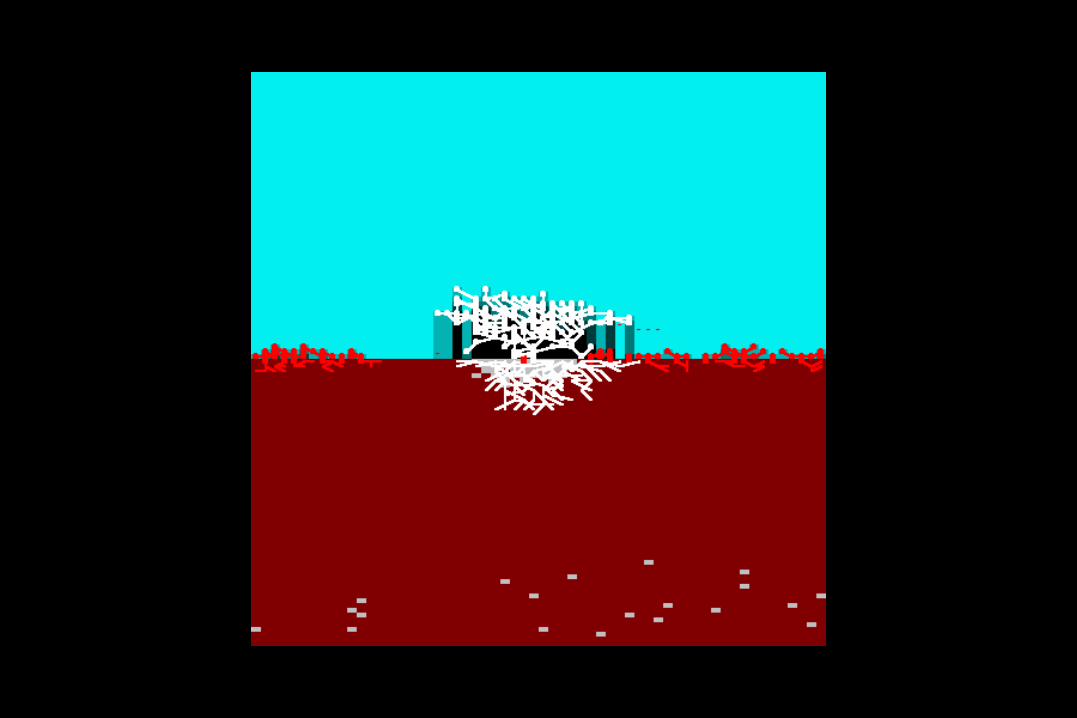
The plant has produced abundant growth above- and below-ground
and zones of resource depletion have appeared

Above-ground binary tree base module
Below-ground binary tree base module
Above-ground array
Below-ground array
Above-ground binary tree ( = shoot system)
Below-ground binary tree ( = root system)
A branching module
An end module
Each plant is structured like this
This is only a diagram, not a painting !

Water and nutrients from below-ground
The branching (parent) modules can pass resources to any adjoining modules
The end-modules capture resources:
Light and carbon dioxide from above-ground
In this way whole plants can grow

The virtual plants interact with their environment (and with their neighbours) just like real ones do
They possess most of the properties of real individuals and populations
For example …

0
500
1000
1500
2000
2500
3000
0 20 40 60 80 100 120 140Time (iterations)
Bio
mas
s (m
odul
es p
er p
lant
)
Light 1 Nutrient 6 Light 2 Nutrient 6
Light 1 Nutrient 8 Light 2 Nutrient 8
S-shaped growth curves

Partitioning towards the resource-poorer half of the environment

0.9
1
1.1
1.2
1.3
0 5 10 15 20Units of nutrient per cell
1 Light unit
2 Light units
Root/shoot allometric coefficient
Maintaining a functional equilibrium above-and below-ground

Foraging towards resources in a heterogeneous environment

And when many plants are grown together in a dense population …

1
10
100
1000
10000
1 10 100
Planting density
Bio
mas
s (m
od
ule
s) p
er p
lan
t
Slope -2/1
… they exhibit self-thinning
but as the plants are 2-dimensional
the thinning slope is not –3/2

All of these plants have the same specification (modular rulebase)
But this specification can easily be changed if we want the plants to behave differently…

For example, we can recreate J P Grime’s system of C-S-R plant functional types
For this, the specifications we need to change are those controlling morphology, physiology and reproductive behaviour …
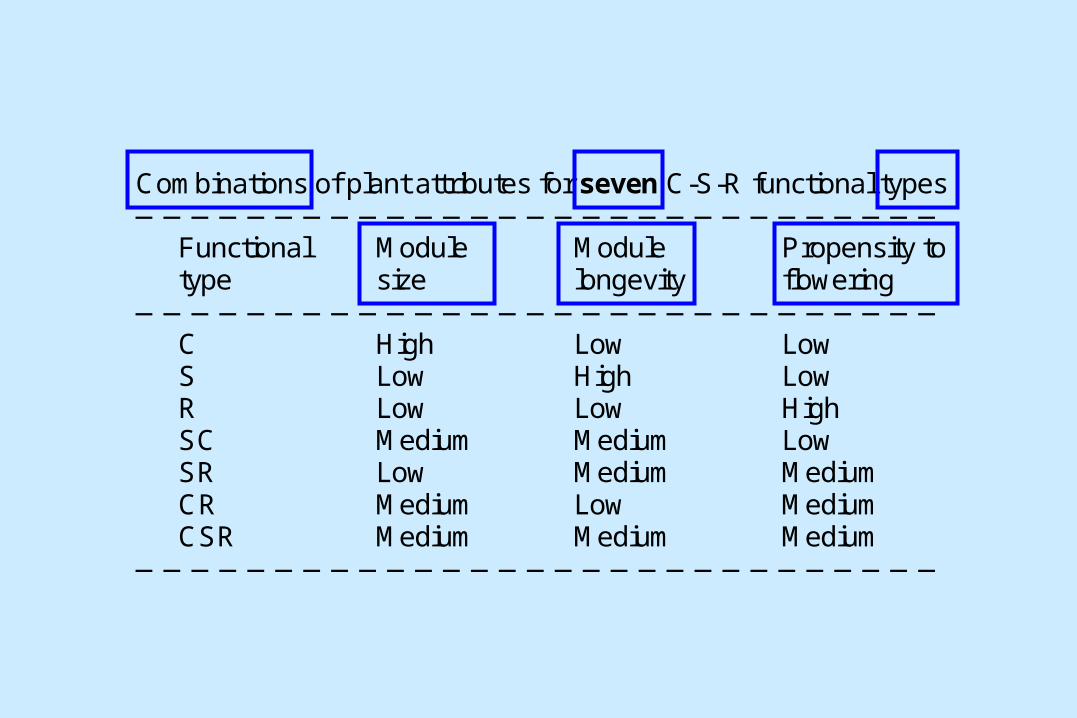
Combinations of plant attributes for seven C-S-R functional types ————————————————————————————— Functional Module Module Propensity to type size longevity flowering ————————————————————————————— C High Low Low S Low High Low R Low Low High SC Medium Medium Low SR Low Medium Medium CR Medium Low Medium CSR Medium Medium Medium —————————————————————————————

With three levels possible in each of three traits, 27 simple functional types could be constructed
However, we model only 7 types; the other 20 include Darwinian Demons that do not respect evolutionary tradeoffs

Let us see some competition between different types of plant
Initially we will use only two types …

Small size, rapid growth and fast reproduction
Medium size, moderately fast in growth and reproduction








(Red enters its 2nd generation)









White has won !

Now let us see if white always wins
This time, its competitor is rather different …

Medium size, moderately fast in growth and reproduction
Large size, very fast growing, slow reproduction










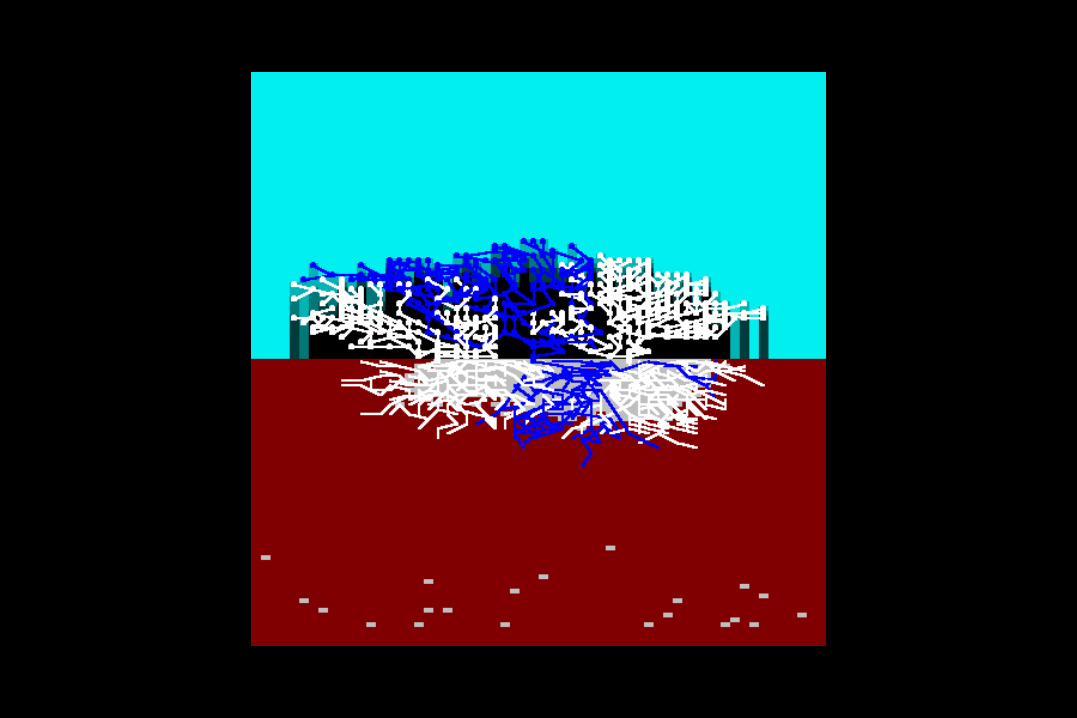












The huge blue type has out-competed both of the white plants, both above- and below-ground
And the simulation has run out of space …


So competition can be demonstrated realistically …
… but most real communities involve more than two types of plant

We need seven functional types to cover the entire range of variation shown by herbaceous plant life
To a first approximation, these seven types can simulate complex community processes very realistically

For example, an equal mixture of all seven types can be grown together …
… in an environment which has high levels of resource, both above- and below-ground

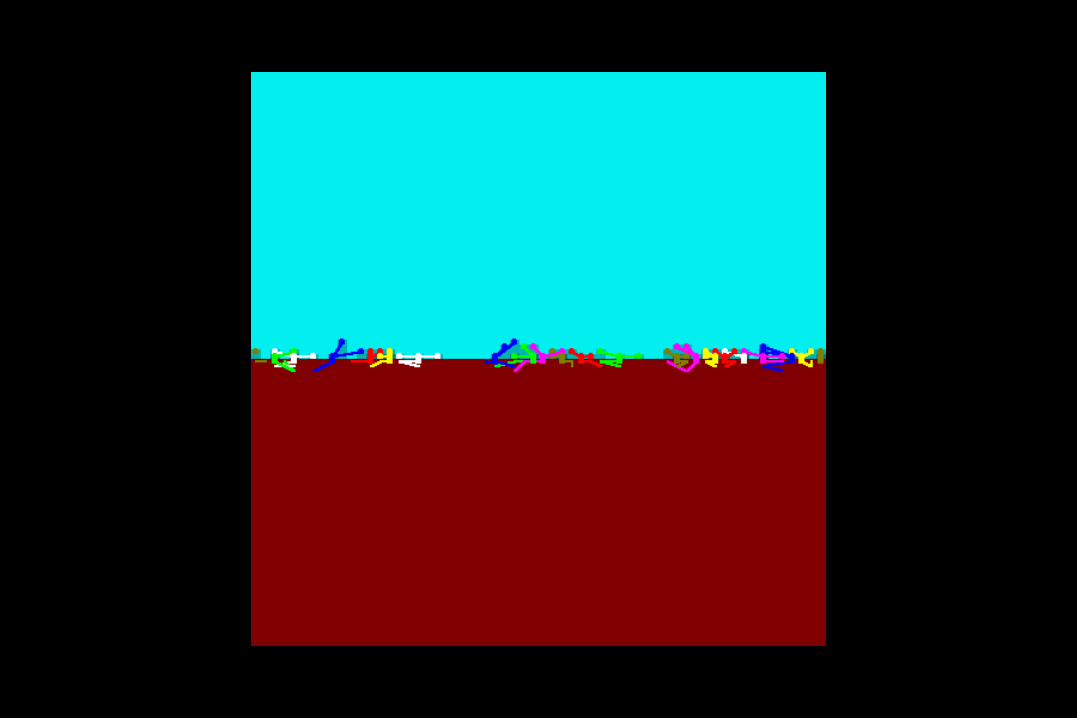


















The blue type has eliminated almost everything except white and green types
And the simulation has almost run out of space again …


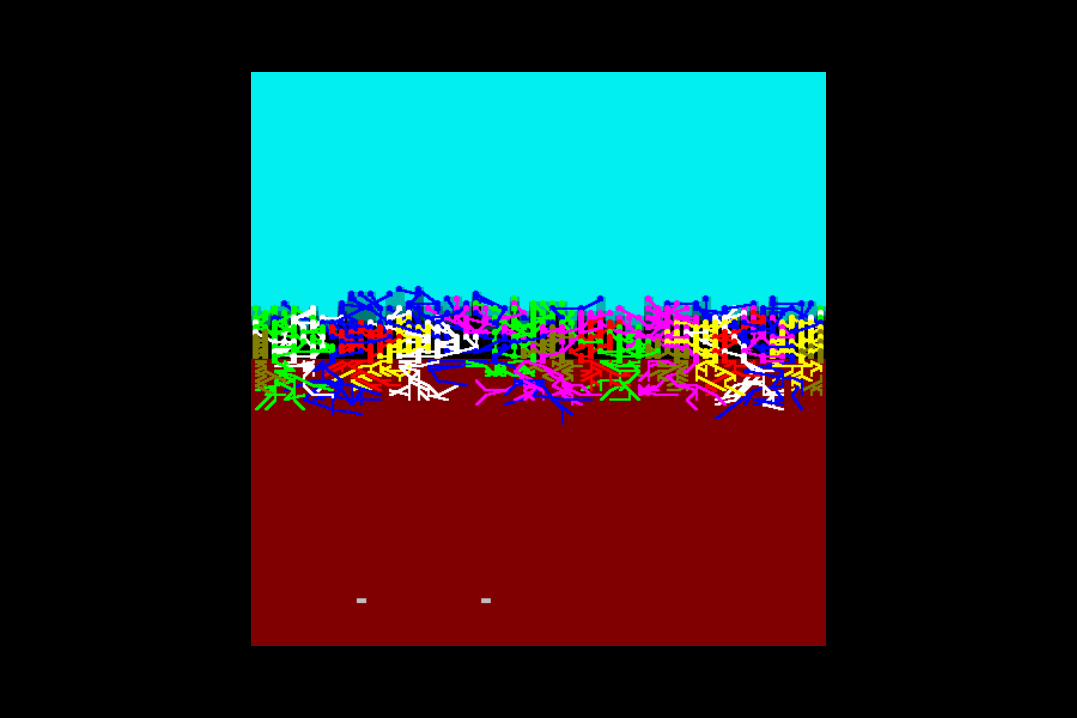
Now we grow the equal mixture of all seven types again …
… but this time the environment has low levels of mineral nutrient resource, as indicated by the many grey cells













(a gap has appeared here)


(red tries to colonize)





(but is unsuccessful)



White, green and yellow finally predominate …
… blue is nowhere to be seen …
… and total biomass is much reduced


Environmental gradients can be simulated by increasing resource levels in steps
Whittaker-type niches then appear for contrasting plant types within these gradients

0
20
40
60
80
100
0 5 10 15 20 25 30
Resource (= 1/stress)
% B
iom
ass
in m
ixtu
re
C
S
SC
(types)

Next we grow the equal mixture of all seven types again …
… but this time under an environmental gradient of increasing mineral nutrient resource

0
1
2
3
4
5
0 5 10 15 20 25 30 35
Resources (= 1/stress)
Num
ber o
f pla
nt ty
pes
surv
ivin
g (m
ax 7
)
Greatest biodiversity is at intermediate stress

Now, environmental disturbance can be defined as ‘removal of biomass after it has been created’
For example, grazing, cutting, burning and trampling are all forms of disturbance

In our model, ‘trampling’ can be applied simply by removing shoot material from certain sizes of patch at certain intervals of time and in a certain number of places
Other forms of disturbance can be simulated by varying each of these factors

So we grow the equal mixture of all seven types again …
… but this time under an environmental gradient of increasing ‘trampling’ disturbance

0
1
2
0 0.2 0.4 0.6 0.8 1
Probability of disturbance
Num
ber
of p
lant
type
s su
rviv
ing
(max
7)
Greatest biodiversity is at intermediate disturbance …
… but the final number of types is
low

Environmental stress and disturbance can, of course, be applied together
This can be done in all forms and combinations

Again we grow the equal mixture of all seven types …
… but with one of seven levels of stress and seven levels of disturbance in all factorial combinations

R 2 = 0.534
0
1
2
3
4
5
0 2000 4000 6000 8000 10000 12000
Total biomass (productivity)
Num
ber o
f pla
nt ty
pes
surv
ivin
g (m
ax 7
)
Greatest biodiversity is at intermediate productivity

The biomass-driven humpbacked relationship is one of the highest-level properties that real plant communities possess
Yet it emerges from the model solely because of the resource-capturing activity of modules in the self-assembling plants

R 2 = 0.534
0
1
2
3
4
5
0 2000 4000 6000 8000 10000 12000
Total biomass (productivity)
Num
ber o
f pla
nt ty
pes
surv
ivin
g (m
ax 7
)
