plant-wide on-line dynamic modeling with state estimation
TRANSCRIPT

INCOOP WorkshopDüsseldorf, January 23 -24, 2003
Plant-wide on-line dynamic modeling with state estimation:Application to polymer plant operation and involvement in
trajectory control and optimization.
Philippe HayotGlobal Process Engineering
The Dow Chemical Company

2On-line dynamic modeling with state estimation
This presentation is referring to the following trademarks or registered trademarks
• STYRON is a trademark of The Dow Chemical Company• Aspen Custom Modeler (ACM), Aspen SEM, InfoPlus.21, Aspen Process Explorer and SpeedUp
are trademarks or registered trademarks of Aspen Technology Inc.• INCA and PathFinder are trademarks of IPCOS• gPROMS is a trademark of PSE Ltd

3On-line dynamic modeling with state estimation
Content
• Dow and its Polystyrene business• Model based applications as enabler of the business strategy elements• Advanced Process Information
• on-line dynamic model with state estimation• application examples• implementation status
• Trajectory control within IMPACT project• Trajectory optimization within IMPACT project• Future Directions

4On-line dynamic modeling with state estimation
Dow is the global leader in Polystyrene with around 20 plants worldwide
Dynamic modeling with state estimation has proven to be a powerful enablerin achieving these objectives.
Consequently:consistent product qualitymaximizing unit productionleveraging of standardization and operating discipline
are key business strategy elements
STYRON is a Trademark of The Dow Chemical Company
Dow and its Polystyrene business

5On-line dynamic modeling with state estimation
Styrene + Solvent
Polystyrene
StyreneSolvent(Initiator)
Rx Rx Rx
Polystyrene solution process

6On-line dynamic modeling with state estimation
On-line dynamic modeling with state estimation
Implementation using Aspen SEM and Aspen Custom Modeler
• Aspen SEM is a general purpose non-linear dynamic data reconciliation solverusing an Extended Kalman Filter linked with ACM for model predictions and timevarying linear state space models.
• Main applications :• continuous, real-time estimation of relevant process variables that are unmeasureable or
infrequently measured• Rejection of unknown disturbances and model deficiencies by adjusting parameters via
introduction of stochastic states (disturbance model)• Look-ahead capability• Process monitoring and decision support tool – allow Data Reconciliation to be
combined with Multivariate Statistical Process Control techniques for fault detectionand diagnosis
• Model Predictive Control

7On-line dynamic modeling with state estimation
Kalman INNOVATIONS
PROCESS PLANT
IntegrateDynamic
Model
KalmanGain
InitialiseDynamic
Model
DCS
Model/PlantMismatch
LinearisationDiscretization
Plant INPUTS Plant OUTPUTS
ModelPREDICTIONS
Model OUTPUTS
Kalman CORRECTIONS
State estimation architecture

8On-line dynamic modeling with state estimation
Aspen SEM applications
• Particularly suited for :• Multi-Product Processes• Frequent and Significant Transitions• Frequent Unknown Disturbances• Steady-State approximations not valid• Batch Processes
• Different operating modes :• On-line real time with plant real-time database• Off-line faster than real time with historical data (MS Excel as repository)• Synchronized with ACM emulation model or with a control application (via dbase)• On-line emulation with plant database populated by an ACM virtual plant model
• Key building block for model based Process Information, Monitoring and Controlsystems

9On-line dynamic modeling with state estimation
Applications for Polystyrene at Dow
• Increased production rates :• better understanding and timely information to plant operation• ability to relax some constraints with same reliability
• Reduced transition times and off-spec product :• staying longer on Grade A and moving faster to Grade B• no waiting for lab results in many cases• understanding and removal of limiting steps
• Preventing upsets :• look-ahead gives early warning leading to preventive action• estimates of unmeasured process variables are used to diagnose and decide how to
address operational issues
• Dynamic reconciliation of recycle stream composition

10On-line dynamic modeling with state estimation
Library of modelsLibrary of models
Main Dynamic ModelMain Dynamic Model
Aspen SEM
Database and Historian
User InterfaceUser Interface
Process equipment and instrumentation
DCSSingle Loop ControlPositions forvalves, pumps, ... Inputs
Measurements/InferentialsInformation
Look-Ahead
Styron is a Trademark of The Dow Chemical Company
Architecture of implementation at Dow

11On-line dynamic modeling with state estimation
Measured and unmeasured components in a streamApplication example (1) : Process Inferentials

12On-line dynamic modeling with state estimation
Continuous property estimates with infrequent samplingApplication example (2) : Product Inferentials

13On-line dynamic modeling with state estimation
Look-ahead prediction indicates “prime time”Application example (3) : faster from prime to prime

14On-line dynamic modeling with state estimation
Relative behavior of PV estimates explains overshoot
Application example (4) : troubleshooting

15On-line dynamic modeling with state estimation
Off-line study on the effect of KF updates on final product property
Application example (5) : off-line FTRT

16On-line dynamic modeling with state estimation
Dynamic Optimization leading tooptimized setpoint trajectories
Productsetpoints
Product specificationsand objective function
Off-line simulationOff-line simulation
State Estimation Look-Ahead
Main Dynamic ModelMain Dynamic Model
Recipe andramps
Process equipment and instrumentation
ModVSingle Loop Control
Database and Historian
Positions forvalves, pumps, ...
User InterfaceUser InterfaceSISOunconstrained
InputsMeasurements/InferentialsInformation
Processsetpoints
Model Predictive Control withgiven setpoint trajectories
Best Practicetrajectories
MIMOconstrained
Advanced Control and Optimization

17On-line dynamic modeling with state estimation
Project IMPACT
• IMproved Polymer Advanced Control Technologies• European Research Project (Eureka)
• Belgium : ISMC, KU Leuven, Dow Belgium• The Netherlands : IPCOS, TU Delft, Dow Benelux
• Dow Scope : Feasibility of MPC and Trajectory Optimization applied to thePolystyrene process
• Application on dynamic model of a Polystyrene plant• Design and simulate the application of a constrained multivariable controller for
trajectory control• Design and execute trajectory optimization based on existing process model• Economic evaluation

18On-line dynamic modeling with state estimation
Trajectory
Optimizer
BEST PRACTICE RECIPETRAJECTORY
INCA INCA
The ProcessProcess (Model)
–++
+Control engine
∆ MV ∆CV
CVtrajMVtraj
MVpv CVpv
LinMod
Project IMPACT : advanced control (1)
Trajectory control
• Moving from one operating point to another following a best practice path• Dealing with non-linearities through :
• Delta mode configuration• Multiple linear models

19On-line dynamic modeling with state estimation
Class 0MV ROC constraints
MV POS constraints
Class 1Requirement 1
Requirement n1
Class iRequirement 1
Requirement ni
Class last Minimize MV moves
Importance
Freedom left ? no
yes
Ready
LS Solution restrictedby the solution ofclass 0
LS Solution restrictedby the solution ofclass 0 to i-1
Project IMPACT : advanced control (2)
Safety
Quality
Productivity
Other ...
Prioritized control
20On-line dynamic modeling with state estimation
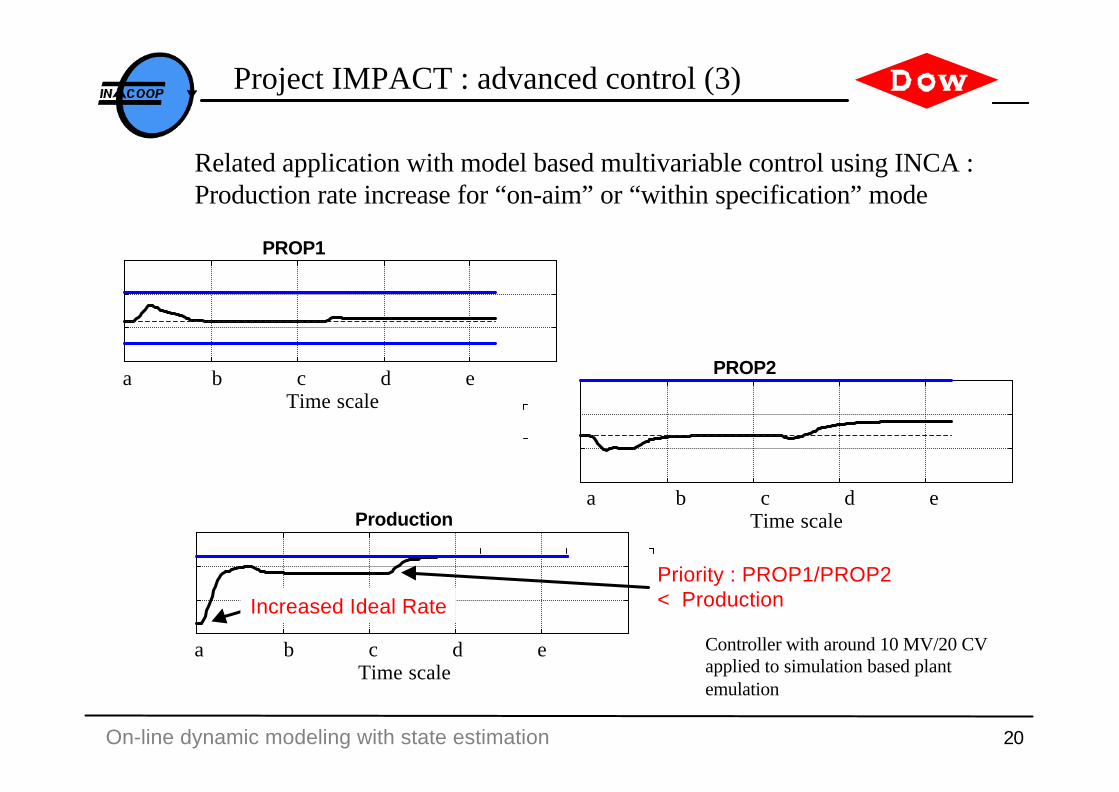
Production
Increased Ideal Rate
Priority : PROP1/PROP2< Production
PROP1
a b c d eTime scale
PROP2
a b c d eTime scale
a b c d eTime scale
Controller with around 10 MV/20 CVapplied to simulation based plantemulation
Project IMPACT : advanced control (3)
Related application with model based multivariable control using INCA :Production rate increase for “on-aim” or “within specification” mode

21On-line dynamic modeling with state estimation
Project IMPACT : advanced control (4)
CV1 - Constraint
MV1
OriginalTrajectory
ControlledTrajectory
CV2 - Quality
CV3 - Productivity
MV2
Disturbance
Trajectory control example :Following a best practice trajectory = history data for MV’s & CV’s

22On-line dynamic modeling with state estimation
Project IMPACT : Trajectory optimization (1)
Economically Optimal Grade Transitions
Objective = Maximize Added Value during atransition
REVENUES COSTS
∫∑∫∑ −=T
iii
T
jjj dttfeedtcostdttthroughputtpriceTAV
00
)()()()()(Q
ualit
y P
aram
eter
Time

23On-line dynamic modeling with state estimation
Project IMPACT : Trajectory optimization (2)
PathFinder, a tool for calculation ofEconomically Optimal Dynamic Grade Transitions
‘Find dynamic MV’s such that objective is optimizedsubject to process operation constraints (Off-line)’
TrajectoryOptimizer
gPROMS, SpeedUp, ACM,…Process Model
MV CV
ObjectiveCalculation

24On-line dynamic modeling with state estimation
Project IMPACT : Trajectory optimization (3)
Fast (Off-Line) Trajectory Optimization
• Smoothly Non Linear• Long Calculation Time
• Highly Non Linear• Short Calculation Time
REPLACE WITH FAST LINEARIZED MODEL (SSQP)
gPROMS,ACM,
SpeedUp,…
EconomicObjective
Mass flow
QualityMV’s Objective
Constraints
Economic ObjectiveProcess Model
Prices Specifications
Typically: 10 Process model evaluations/Linearizations needed
Economically Optimal Dynamic Grade Transitions

25On-line dynamic modeling with state estimation
Project IMPACT : Trajectory optimization (4)
SQP run on Linearized model +economic criterion
Initial Trajectory
Final Trajectory
Intermediate Result
Check on Rigorous Model
Improved? No
Adapt Trust Region
Derive New Linear Time Variantmodel
Yes
SSQP

26On-line dynamic modeling with state estimation
Project IMPACT : Trajectory optimization (5)
PathFinder applied to a validated rigorous model of aDow polystyrene production facility at Tessenderlo,
Belgium
• 14 Manipulated Variables with 13 move times = 182 Degrees of freedom
• Absolute Boundaries on all MV’s
• Rate of Change Constraints on 10 MV’s
• Path Constraints on 8 Process Variables

27On-line dynamic modeling with state estimation
PR
OP
1P
RO
P2
Pro
duct
ion
MV
1M
V3
PC
1Price Onspec-Offspec :Price Offspec-Styrene :Legend :
Original
Not ApplicableNot Applicable
Case 1
HighNegative
Case 2
LowPositive
Simulation based results
Project IMPACT : Trajectory optimization (6)
Example of result : Trajectory Optimization based on market situation

28On-line dynamic modeling with state estimation
Project IMPACT
∆y+-
+
+
MPC INCA®
∆u
Optimal TrajectoryRecipe
PathFinder
Extended KalmanFilter
yu Latest Process Model
Off-Line
On-Line
yopt
uProcess
uopt
y
Integrated Trajectory Control and Optimization

29On-line dynamic modeling with state estimation
Future directions
• More model based advanced process information implementations and applications• Real life application of transition control in a polymer plant• Combined application of transition optimization and control• Other area of particular interest :
• Robust dynamic modeling for optimization and control applications• Real-time integrated dynamic optimization and control• Robust non-linear model predictive controllers• Non-linear model reduction• Operator training
• Related papers :• W. Van Brempt, P. Van Overschee , T. Backx, J. Ludlage, P. Hayot, L. Oostvogels, S. Rahman, “Economically
Optimal Grade Change Trajectories: Application on a Dow Polystyrene Process Model”, ESCAPE-12, TheHague, The Netherlands, 2002.
• W. Van Brempt, P. Van Overschee , T. Backx, J. Ludlage, P. Hayot, L. Oostvogels, S. Rahman, “Grade ChangeControl using INCA Model Predictive Controller: Application on a DOW Polystyrene Process Model”, invitedpaper at the American Control Conference 2003, Denver, Colorado, USA, June 2003.
• P.Hayot, S.Papastratos, “Going on-line with dynamic models using Aspen Custom Modeler and Aspen SEM”,AspenWorld 2002, Washington D.C., USA, October 2002.